Steering magnetization dynamics of nanoparticles with ... · Ascheme is proposed for steering the...
10
Steering magnetization dynamics of nanoparticles with ultrashort pulses A. Sukhov 1,2 and J. Berakdar 2 1 Max-Planck-Institut für Mikrostrukturphysik, Weinberg 2, D-06120 Halle/Saale, Germany 2 Institut für Physik, Martin-Luther-Universität Halle-Wittenberg, Heinrich-Damerow-Str. 4, 06120 Halle, Germany Received 21 January 2009; revised manuscript received 2 April 2009; published 28 April 2009 A scheme is proposed for steering the magnetization of a monodomain nanoparticle to a predefined state via ultrashort magnetic pulses. Based on the Landau-Lifshitz-Gilbert equation we find analytical expressions for the driving fields and the magnetization dynamics valid for pulse durations shorter than the field-free preces- sional period of the magnetization. These expressions do not depend on the type of anisotropy and provide conditions for fast switching and magnetization “freezing.” Numerically, using the Landau-Lifshitz-Gilbert equation extended to finite temperatures we confirm the robustness of the analytical predictions to thermal fluctuations, different anisotropy types, and shapes of pulses; and also explore the range of validity of the short-pulse approximation. DOI: 10.1103/PhysRevB.79.134433 PACS numbers: 75.10.Hk, 75.40.Gb, 75.40.Mg I. INTRODUCTION Ongoing experimental and theoretical researches on nano- magnetism are fueled by various technological applications such as high-density storage media and fast sensors. 1–3 The efficient operation of storage devices with a high density entails a high-rate recording method, i.e., a procedure for fast magnetization switching. To meet this demand several tech- niques for magnetization reversal were explored: Making use of the inverse Faraday effect the spin dynamics can be trig- gered by a laser. 4–6 Extensive experimental and theoretical researches were also devoted to the reversal process by means of external static or alternating magnetic fields. 7–16 A currently active area of research is the magnetization dynam- ics driven either by a spin torque or pulses of spin torques 17 that are generated by appropriate spin polarized electric current. 18–25 As shown by several studies, 26–34 transverse magnetic fields and field pulses are further efficient means for fast switching and may allow, upon duration control, 2,32 for a quasiballistic magnetization switching. Here we address the issue of the magnetization switching of monodomain magnetic nanoparticles from the perspective of control strategies; in particular we make use of the ideas of the local-control theory LCT. 35–37 LCT is applied mostly in quantum chemistry where a number of other control methods 35,36,38,39 are used. The basic idea of LCT is to derive the control fields; in our case the parameters of the magnetic field pulses, from the response of the system, i.e., from the magnetization evolution. 34 Obviously, such a scheme leads to an iterative procedure where a field pulse starts the magne- tization evolution whose details determine the next field pulses that allow for a magnetization steering. In the event that the pulse durations are small on the scale of the magne- tization precessional period we are able to derive transparent analytical expressions for this LCT scheme for determining the type of pulses that lead to a fast controlled switching or stabilizing the magnetization around a predefined state, an effect which we call magnetization “freezing.” The scenario for the magnetization dynamics that emerges from our scheme is that sudden impulsive magnetic field kicks guide the magnetization toward the desired direction. In between the pulses field-free precessions and relaxation take place. The efficiency and the robustness of the scheme to thermal fluctuations are tested by performing finite-temperature full numerical calculations and considering different types of an- isotropy. II. ANALYTICAL MODEL We consider FePt and cobalt nanoparticles that have a uniaxial anisotropy Fe 50 Pt 50 Refs. 3 and 40; Co Ref. 41 and a cubic anisotropy Fe 70 Pt 30 Refs. 3 and 42. The par- ticle magnetic dynamics can be modeled by the classical evolution of a large classical magnetic moment Stoner nanoparticle 2 . The classical dynamics of such a magnetic moment is governed by the Landau-Lifshitz-Gilbert LLG equations. 43,44 The precessional motion of the magnetization is described by the time evolution of the two independent angles azimuthal angle and polar angle. When includ- ing the constant Gilbert damping , 44 the LLG reads as 2 1+ 2 d dt = 1 sin · H - sin 2 · H , 1+ 2 d dt =- 1 sin · H - · H , 1 where the total energy is given by H = H A + H F = H A - S · b 0 t . 2 The energy is measured in units of S B A . Here S denotes the magnetic moment of the nanoparticle at saturation, B A =2D / S is the anisotropy field and D is the anisotropy en- ergy density. H A and H F are, respectively, the contributions from the anisotropy and the interaction with the external magnetic field b 0 t. Time is expressed in the units of the PHYSICAL REVIEW B 79, 134433 2009 1098-0121/2009/7913/13443310 ©2009 The American Physical Society 134433-1
Transcript of Steering magnetization dynamics of nanoparticles with ... · Ascheme is proposed for steering the...

Steering magnetization dynamics of nanoparticles with ultrashort pulses
A. Sukhov1,2 and J. Berakdar2
1Max-Planck-Institut für Mikrostrukturphysik, Weinberg 2, D-06120 Halle/Saale, Germany2Institut für Physik, Martin-Luther-Universität Halle-Wittenberg, Heinrich-Damerow-Str. 4, 06120 Halle, Germany
�Received 21 January 2009; revised manuscript received 2 April 2009; published 28 April 2009�
A scheme is proposed for steering the magnetization of a monodomain nanoparticle to a predefined state viaultrashort magnetic pulses. Based on the Landau-Lifshitz-Gilbert equation we find analytical expressions forthe driving fields and the magnetization dynamics valid for pulse durations shorter than the field-free preces-sional period of the magnetization. These expressions do not depend on the type of anisotropy and provideconditions for fast switching and magnetization “freezing.” Numerically, using the Landau-Lifshitz-Gilbertequation extended to finite temperatures we confirm the robustness of the analytical predictions to thermalfluctuations, different anisotropy types, and shapes of pulses; and also explore the range of validity of theshort-pulse approximation.
DOI: 10.1103/PhysRevB.79.134433 PACS number�s�: 75.10.Hk, 75.40.Gb, 75.40.Mg
I. INTRODUCTION
Ongoing experimental and theoretical researches on nano-magnetism are fueled by various technological applicationssuch as high-density storage media and fast sensors.1–3 Theefficient operation of storage devices with a high densityentails a high-rate recording method, i.e., a procedure for fastmagnetization switching. To meet this demand several tech-niques for magnetization reversal were explored: Making useof the inverse Faraday effect the spin dynamics can be trig-gered by a laser.4–6 Extensive experimental and theoreticalresearches were also devoted to the reversal process bymeans of external static or alternating magnetic fields.7–16 Acurrently active area of research is the magnetization dynam-ics driven either by a spin torque or pulses of spin torques17
that are generated by appropriate spin polarized electriccurrent.18–25 As shown by several studies,26–34 transversemagnetic fields and field pulses are further efficient meansfor fast switching and may allow, upon duration control,2,32
for a quasiballistic magnetization switching.Here we address the issue of the magnetization switching
of monodomain magnetic nanoparticles from the perspectiveof control strategies; in particular we make use of the ideasof the local-control theory �LCT�.35–37 LCT is applied mostlyin quantum chemistry where a number of other controlmethods35,36,38,39 are used. The basic idea of LCT is to derivethe control fields; in our case the parameters of the magneticfield pulses, from the response of the system, i.e., from themagnetization evolution.34 Obviously, such a scheme leads toan iterative procedure where a field pulse starts the magne-tization evolution whose details determine the next fieldpulses that allow for a magnetization steering. In the eventthat the pulse durations are small on the scale of the magne-tization precessional period we are able to derive transparentanalytical expressions for this LCT scheme for determiningthe type of pulses that lead to a fast controlled switching orstabilizing the magnetization around a predefined state, aneffect which we call magnetization “freezing.” The scenariofor the magnetization dynamics that emerges from ourscheme is that sudden impulsive magnetic field kicks guidethe magnetization toward the desired direction. In between
the pulses field-free precessions and relaxation take place.The efficiency and the robustness of the scheme to thermalfluctuations are tested by performing finite-temperature fullnumerical calculations and considering different types of an-isotropy.
II. ANALYTICAL MODEL
We consider FePt and cobalt nanoparticles that have auniaxial anisotropy �Fe50Pt50 �Refs. 3 and 40�; Co �Ref. 41��and a cubic anisotropy �Fe70Pt30 �Refs. 3 and 42��. The par-ticle magnetic dynamics can be modeled by the classicalevolution of a large classical magnetic moment �Stonernanoparticle2�. The classical dynamics of such a magneticmoment is governed by the Landau-Lifshitz-Gilbert �LLG�equations.43,44 The precessional motion of the magnetizationis described by the time evolution of the two independentangles � �azimuthal angle� and � �polar angle�. When includ-ing the �constant� Gilbert damping �,44 the LLG reads as2
�1 + �2�d�
dt=
1
sin �·�H��
−�
sin2 �·�H��
,
�1 + �2�d�
dt= −
1
sin �·�H��
− � ·�H��
, �1�
where the total energy is given by
H = HA + HF = HA − S · b0�t� . �2�
The energy is measured in units of �SBA. Here �S denotesthe magnetic moment of the nanoparticle at saturation, BA=2D /�S is the anisotropy field and D is the anisotropy en-ergy density. HA and HF are, respectively, the contributionsfrom the anisotropy and the interaction with the externalmagnetic field b0�t�. Time is expressed in the units of the
PHYSICAL REVIEW B 79, 134433 �2009�
1098-0121/2009/79�13�/134433�10� ©2009 The American Physical Society134433-1
goffin
Text Box
TH-2009-34

field-free precessional time Tprec=2� / ���2D /�S�� �which is�5 ps for a 6 nm large Fe50Pt50 nanoparticle45�, where � isa gyromagnetic ratio. For the control scheme we considermagnetic pulses of the form
b0�t� = � f�t�b0
2��cos �0ex + sin �0ey� , t0 − � t t0 + �
0, elsewhere.� ,
�3�
ex/y are units vectors along the x and y axes. Equation �3� isrealizable by two perpendicular magnetic fields bx and byeach having a duration 2� and a shape �envelope function�f�t� centered at some time moment t= t0. Their relativestrength is characterized by the mock angle �0, with tan �0= �by� / �bx�. The exerted total field strength is �f �b0 / �2��, i.e.,b0�t�=bx+by. To achieve shorter switching times and/orlower switching fields we may optimize the geometries ofthe applied fields. This point has been proposed in a recentwork46 for static magnetic fields. For the type of fields em-ployed in this work, this is also true as confirmed by sometest calculations that we performed.
For the total energy change one finds
�H��
=�HA
��+
�HF
��=
�HA
��+
b0f�t�2�
sin � sin�� − �0� ,
�H��
=�HA
��+
�HF
��=
�HA
��−
b0f�t�2�
cos � cos�� − �0� .
The new dimensionless variable �t�,
�t� =t − �t0 + �� + 2�
2�,
d
dt=
1
2�, �4�
has the property
= 0 for t = t0 − � ,
= 1 for t = t0 + � . �5�
In the system evolves according to
1
2�
d�
d= p 1
sin �
�HA
��−
�
sin2 �
�HA
��
−pb0f�t���
2� cos �
sin �cos �� + �
sin ��
sin � ,
1
2�
d�
d= p−
1
sin �
�HA
��− �
�HA
�� +
pb0f�t���2�
�− sin ��
+ � cos � cos ��� , �6�
where we introduced the notation
�� = � − �0, p =1
1 + �2 .
We recall that the time scale in Eqs. �4� and �6� is set bythe precessional period Tprec which itself is set by the aniso-tropy energy. From Eq. �6� it follows that when �→0 �validfor ��Tprec�, the effect of anisotropy is negligible during andright after the pulse. Thus, on time scales �t− t0��1 the mag-netic dynamics is governed only by the parameters ��, �,and b0 regardless of the type of anisotropy. In Sec. III thedynamics of the magnetization will be considered separatelyduring and right after the pulse application �excitation� andfor the field-free motion �precession and relaxation�.
III. ANALYTICAL TREATMENT
A. Field-free nanoparticle with a uniaxial anisotropy
In the absence of a magnetic pulse, i.e., for b0=0 in Eq.�6�, and for a uniaxial anisotropy described by
HAU = −
1
2cos2 � , �7�
the solution of the LLG equations is well known �cf., e.g.,Ref. 47 �Eqs. �A4� and �A10��. For the initial conditionsangles � f�t= t̄0� and � f�t= t̄0� one finds
� f�t� = ��t̄0� t − t̄0
1 + �2 1
�ln� cos � f�t̄0��1 + �1 + tan2 � f�t̄0� · e−2��t−t̄0�/1+�2
�
1 + cos � f�t̄0�� ,
tan � f�t� = tan � f�t̄0� · e−�/1+�2�t−t̄0�. �8�
“+” or “−” refer to 0�� /2 or � /2��, respectively.This solution indicates that the system relaxes through pre-cessions to one of two energy minima, i.e., � f ,min 1=0 or� f ,min 2=�.
B. Field-free nanoparticle with a cubic anisotropy
In the absence of magnetic pulses for a system with acubic anisotropy,48 i.e., when
A. SUKHOV AND J. BERAKDAR PHYSICAL REVIEW B 79, 134433 �2009�
134433-2

HAC = −
1
2�cos2 � sin2 � sin4 � + cos2 � sin2 �� , �9�
the equations governing the magnetization dynamics are
d�
dt= −
1
1 + �2cos � 1
2sin2 2� sin2 � + cos 2��
+1
4
�
1 + �2sin2 � sin 4� ,
d�
dt= +
1
4
1
1 + �2sin3 � sin 4�
+1
2
�
1 + �2sin 2� 1
2sin2 2� sin2 � + cos 2�� .
�10�
The solution of these equations has to be performed numeri-cally. We note, however, that if � varies slowly �e.g., as inthin films�, Eq. �10� admits an approximate analytical solu-tion. The analytical methods outlined below rely on a short-time evolution for which the type of anisotropy during theaction of the external driving is not important �as discussedabove�.
C. Nanoparticle subject to ultrashort magnetic pulses
Applying the ultrashort magnetic pulses b0�t�, i.e., pulseswith durations ��Tprec, we obtain from Eq. �6�
d�
d= −
1
sin �
b0f�t���1 + �2 �cos � cos �� + � sin ��� ,
d�
d=
b0f�t���1 + �2 �− sin �� + � cos � cos ��� . �11�
These equations describe a stroboscopic evolution; i.e., theydetermine ��t+� and ��t+� right after the pulses for somedefined conditions before the pulses ��t−� and ��t−�. No in-formation is provided on the evolution during the pulse. Herewe use the notation t−
ª t0−� and t+= t0+�. In the local-control theory37–39 the control field that drives the system toachieve a desired property is derived from the response ofthe system. In the context of switching we define the controlcondition as
��t+� � ��t−� ∀ t+,t−, �12�
meaning that the polar angle has to increase upon the pulseapplication �no condition is set on ��. An analytical expres-sion for the controlled evolution in line with Eq. �12� isobtainable, for instance, for ��=0 or ��=3� /2.
1. Solution for ��=0
We apply a sequence of the pulses �Eq. �3�� i=1. . .N withthe same durations and each pulse is centered at the timemoment t0,i. For ��=0, i.e., when for a pulse the fieldstrength ratio �i,0 is equal the temporal �at ti,0� magnetizationazimuthal angle �, we find for the solution of Eq. �11� the
following changes in � and � right after the ith pulse,
��ti+� = ��ti
−� − ln�tan ��ti+�
2� ·
tan ��ti−�
2+
�
4� + 1
tan ��ti−�
2+
�
4� − 1� ,
tan ��ti+�
2� =
tan ��ti−�
2+
�
4� · e�b0f�t0,i�/1+�2
− 1
tan ��ti−�
2+
�
4� · e�b0f�t0,i�/1+�2
+ 1
. �13�
We remark that the pulse-induced change in � is not uniform.It depends on the prior-pulse angle ��ti
−� and increases as acomplicated function of it. As for the dependence on damp-ing, for �→0 switching becomes ineffective since there areno changes in � �the second equation of system �13� givestan���ti
+� /2�=tan���ti−� /2�� and in � ���ti
+�=��ti−��. For suf-
ficiently high damping ���1� ��ti+�→� /2 and ��ti
+�strongly depends on ��ti
−�. Concerning d� /d�0 we con-clude from Eq. �11� that the sign of d� /d depends on cos �,i.e., whether 0�� /2 or � /2��, meaning that onechooses ��=0 for 0�� /2 and ��=� for � /2��to obtain the complete magnetization reversal.
2. Solution for ��=3� Õ2
For the control condition ��=3� /2 we derive
��ti+� = ��ti
−� + � ln� tan ��ti−�
2+
1
2
b0f�t0,i�1 + �2 �
tan ��ti−�
2� � ,
��ti+� = ��ti
−� +b0f�t0,i�1 + �2 . �14�
We observe a uniform pulse-induced increase in � with anamount that depends on the field amplitude b0. Another im-portant feature is that for small dissipation this increase onlyslightly depends on damping and is proportional to the ap-plied field leading thus to rapid changes in the z projection ofthe magnetization. Additionally, in the low damping regime� remains almost unchanged which makes this regime veryeffective for switching �ballistic switching�. Only smallchanges in � and � occur if the damping becomes large.
3. Solution for general ��
The second equation of Eq. �11� can be solved for �� in ageneral form. For ��ti
−� and ��ti+� the solution reads
�2�2arctanh��1 + cos 2��
cos ���� cos �� + sin ���tan
�
2��2 − 1 + ��2 + 1�cos 2��
����ti
−�
��ti+�
=b0f�t0,i�1 + �2 · ��2 − 1 + ��2 + 1�cos 2�� . �15�
STEERING MAGNETIZATION DYNAMICS OF… PHYSICAL REVIEW B 79, 134433 �2009�
134433-3

The quantity of interest is ��i=��ti+�−��ti
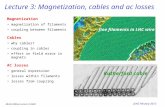
−� as a function of��. The knowledge of ��i���� is of a particular importancewhen it comes to the question of the role of thermal fluctua-tions. The issue here is to identify the conditions/parametersfor which we achieve a maximal positive tilt angle upon thepulse. The results in Figs. 1 and 2 show the dependence of��i���� �graphical illustration of Eq. �15��.
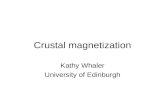
Figure 1 indicates a positive tilt angle in the range around��+2�. The black thin curve for �=0 shows no in-crease in ��i for ��=0 �consistent with the second equationof Eq. �11�� since only precession is possible. For 3� /2 themaximum of ��i is achievable even for �=0. This finding isconsistent with the second equation of Eq. �14�, where thechange in � upon the pulse is positive and proportional to thefield amplitude b0 for small �. The reason for this effect isthat the applied field is then tuned to exert a large moment onthe magnetization. Other trends deducible from this figureare: a further increase in damping leads only to smaller ��iwhereas the maxima of the peaks shift toward smaller ��.Note that a change in the period of �� is not accessible. Italways remains the same 2�, meaning that there are tworegimes: If 0��� the change is negative, whereas for���2� this quantity is positive. Figure 2 depicts��i���� dependence for various field amplitudes. A generaltrend here is that for higher field amplitudes larger angularchanges are achievable. For high amplitudes �from b0=2.0�switching is possible with only one pulse since ��i�� /2.The period of �� remains the same as for Fig. 1, namely, 2�.
Concerning the case of finite temperatures T�0 K, themagnetization direction, in particular �, should be assumedto be shifted randomly with respect to �0. For this reason, ananalytical expression for ��i���� is not available. However,
from the preceding discussion we can conclude that the mostoptimal conditions for switching are when ��=3� /2 orclose to it and for small damping. Both conditions can befulfilled highly precisely, allowing thus for a finite-temperature control of the magnetization.
4. Solution for general �� and �\0
Assuming �→0 in Eq. �11� we find the following solu-tion:
��ti+� = ��ti
−� −cos ��
sin ��ln� tan���ti
−� − b0f�t0,i�sin ���sin ��ti
−�� ,
��ti+� = ��ti
−� − b0f�t0,i�sin �� . �16�
Similar to Eq. �14� we conclude that switching is mostlyeffective if ��=3� /2 which leads to a uniform change in �and hardly any changes in �. Pulses applied in this waywould lead only to a precessional motion of the magnetiza-tion. The relation for �, as given by Eq. �16�, is consistentwith the results presented in Fig. 1 for �=0 �the thin blackcurve�.
5. Critical field amplitudes needed for reversal for a sequence ofpulses with fixed ��
Above we discussed the influence of �� on the magneti-zation reversal control. Another relevant parameter is thefield amplitude. Here we attempt to find the minimum fieldamplitudes needed for pulse-assisted reversal. We note thatthe idea of deriving the critical fields has already been de-veloped, e.g., in Ref. 49, however without the short-pulseapproximation. For a magnetization reversal, an obvious re-quirement on the external field would be that the change in �induced by the ith pulse, i.e., ��i
excit=��ti+�−��ti
−�, should benot less than the subsequent �until the next pulse i+1� relax-ation, ��i
relax=��ti+1− �−��ti
+� or
��iexcit � ���i
relax� . �17�
A critical field amplitudes is achieved when ��iexcit=��i
relax.From Eq. �8� we find that
��irelax = arctan�tan���ti
−�� · e�i/1+�2� − ��ti
−� , �18�
where i is the time lag during relaxation.Inspecting Eqs. �18� and �14� we deduce the critical field
value needed to switch the magnetization using magneticpulses ���i=3� /2 for all pulses�,
b0cr���i=3�/2� = �1 + �2��arctan�tan���ti
−�� · e�i/1+�2� − ��ti
−�� .
�19�
Similarly for ��i=0 we use Eqs. �18� and �13� and obtain forthe critical field
0 Π�2 Π 3Π�2 2Π�Π�8
�Π�16
0
Π�16
Π�8
∆Φ, �rad�
�Θ,�r
ad�
Α�3.0
Α�2.0
Α�1.0
Α�0.05
Α�0.0
FIG. 1. �Color online� Change in angle � directly after the ithpulse as a function of �� plotted for different values of damping �.Other parameters: b0=0.4, ��ti
−�=� /180, and f�t0,i�=1.
0 Π�2 Π 3Π�2 2Π
�Π�2
�Π�4
0
Π�4
Π�2
∆Φ, �rad�
�Θ,�r
ad�
b0�3.0
b0�2.0
b0�1.0
b0�0.5
b0�0.1
FIG. 2. �Color online� Change in � right after the ith pulse as afunction of �� shown for different field amplitudes b0. Further pa-rameters: �=1.0, ��ti
−�=� /180, and f�t0,i�=1.
A. SUKHOV AND J. BERAKDAR PHYSICAL REVIEW B 79, 134433 �2009�
134433-4

b0cr���i=0� = −
1 + �2
�ln�tan��ti
−�2
+�
4�
+1 + �2
�ln� 1 + tan1
2arctan�tan���ti
−�� · e�i/1+�2�
1 − tan1
2arctan�tan���ti
−�� · e�i/1+�2�� .
�20�
Dependencies �19� and �20� are shown in Fig. 3 for i=TPrec. From these results we conclude: to switch the mag-netization a lower critical field can be applied if ��ti
−� is�roughly� known. Otherwise one can apply the �possiblylarger� critical field deduced from the maximum of the graphshown in Fig. 3. The above analytical expressions areachieved for the condition that the delay time i is constantfor all pulses. The question of whether b0cr���ti
−�� changes ifi is not constant is addressed in Fig. 4. For ��i=3� /2 anexponentially increasing repetition of pulses gives rise to anincrease in critical field amplitudes. Further changes in idependence for ��i=3� /2 have a minor effect on theb0cr���ti
−�� dependence. In the case of ��i=0 various i de-pendencies modify strongly b0cr���ti
−��.
6. Sequence of magnetic pulses for fixed ��
For certain field strength ratio �0 we allow at first for afield-free propagation �starting from some initial � f�0� and� f�0�� until � f�t� is such that �� is 0 or 3� /2. At this mo-ment the pulses are applied and the angular change in � and� is calculated according to formula �13� or �14�, respec-tively. Figure 5 illustrates this procedure and the process ofthe reversal in the small damping regime which is appropri-ate for magnetic nanoparticles. There are certain differenceswhen choosing ��i=3� /2 or ��i=0: for ��i=3� /2 the in-crease in � comes about due to equidistant jumps �Eq. �14��,whereas for ��i=0 the length of jumps depends on the cur-rent � ,� coordinate. In the vicinity of �=� /2 the jumps arehigher. For this reason the switching is faster for ��i=0 thanfor ��i=3� /2 with a total number of pulses 6 and 9, respec-tively. The total switching field is 6�0.2=1.2 and 9�0.2=1.8, respectively. Thus, based on Fig. 5 we argue that theefficient way to switch the magnetization is to apply a pulseat ��i=3� /2 for 0�� /4 and at ��i=0 for � /4�� /2. The reason why the switching is possible for ��i=3� /2 with field amplitude b0=0.2 directly follows fromFig. 3. For �=0.05 and ��i=3� /2, this amplitude is muchhigher than the maximum critical field. The assumption thati�constant is fulfilled �see the upper inset of Fig. 5�. If��i=0 the switching occurs because i is decaying �cf. lowerinset of Fig. 5�. For extremely high values of damping amarkedly different picture emerges �cf. Fig. 6�. First featureobserved from this figure is that after each pulse the increasein � is roughly the same for both ��i=0 and ��i=3� /2�consistent with the results of Fig. 1 for �=1.0�. In contrastto Fig. 5 where due to small dissipation no significant stepsin � have been seen, here after each magnetic pulse thesystem relaxes and therefore the pulses are applied everyprecessional period. The reversal is achieved for ��i=0 forthe sequence of 26 magnetic pulses. For ��i=3� /2 it is notachievable at all. Based on the results shown in Fig. 3, one isable to explain also why the switching for �=1.0 and ��i=3� /2 does not occur: The field amplitude is only enough toreach the angle ��� /64. After this, relaxation begins. Incontrast to that, the reversal for ��i=0 and �=1.0 is possible
00.10.20.30.40.5
α=0.01α=0.05α=0.1α=0.5α=1.0
0 π/8 π/4 3π/8 π/2 5π/8θ(t
-
i), [rad]
00.20.40.60.8
1
α=0.01α=0.05α=0.1α=0.5α=1.0
b 0cr,[
anis
.fie
ld] δφ
i=3π/2
δφi=0
FIG. 3. �Color online� Dependence of the critical field amplitudeb0cr on the angle ��ti
−� at the beginning of pulse application for��i=3� /2 and ��i=0. Pulses are applied with a delay of the pre-cessional period.
0
0.02
0.04
0.06 τi=const
τi~θ(t
-
i)
τi~-θ(t
-
i)
τi~e
θ(t-
i)
τi~e
−θ(t-
i)
0 π/8 π/4 3π/8 π/2 5π/8θ(t
-
i), [rad]
0
2
4τ
i=const
τi~θ(t
-
i)
τi~-θ(t
-
i)
τi~e
θ(t-
i)
τi~e
−θ(t-
i)
b 0cr,[
anis
.fie
ld]
δφi=3π/2
δφi=0
FIG. 4. �Color online� Critical-field-amplitude dependence on��ti
−� right before the pulse for ��i=3� /2 and ��i=0 for �=0.05.Pulses are applied with various delay times.
0
π/4
π/2
3π/4
π
0 2 4 6 8 10 12 14 16 18 20Time t, [T
prec]
0
π/4π/2
3π/4
π
0 1 20
π/4
δφi=3π/2
Number of pulses = 9
0 0.2 0.4 0.60
π/4
δφi=0
Number of pulses = 6
Ang
leθ,
[rad
]
FIG. 5. �Color online� Evolution of ��t� for ��i=3� /2 and��i=0. Other parameters: � f�0�=� /180, � f�0�=� /180, �0=� /3,�=0.05, b0=0.2, and f�t0,i�=1. Insets show the detailed motion atthe beginning of the pulse application �field amplitudesenlarged �5�.
STEERING MAGNETIZATION DYNAMICS OF… PHYSICAL REVIEW B 79, 134433 �2009�
134433-5

due to a dependence of i���ti−�� which decreases the critical
fields.
IV. NUMERICAL TREATMENT
In the framework of the analytical solution presented inSec. III the questions of the angle shift ��i, the critical fieldsb0cr, and partly the delay times between the pulses i wereaddressed. On the other hand, the magnetization dynamicsduring the pulse, the effect of the form of the pulse, as wellas the role of thermal fluctuations cannot be predicted ana-lytically and have to be investigated by solving numericallyfor the driven Landau-Lifshitz-Gilbert equation includingtemperature effects. Here we utilize the approach we pre-sented recently in Ref. 45. The analytical development ofSec. III is imperative in that it sets the range of parametersfor the numerical calculations. The damping parameters arechosen as experimentally determined �Ref. 2 and referencestherein�. Usually, for nanoparticles the typical values ofdamping are in the range of �0.001, 0.05�. We deliberatelyuse the maximum damping 0.05 to speed up the relaxationprocess.
A. Sequence of short magnetic rectangular-shaped pulses
To inspect the validity of the short-time approximationused to derive the analytical results we consider rectangularmagnetic pulses having a duration TR, i.e.,
b0R�t� = �b0
R�cos �0ex + sin �0ey� , t0 − TR t t0 + TR
0, elsewhere.� .
�21�
The ��t� evolution for different TR is numerically calculated�Fig. 7�. The control of the magnetization is achieved whenthe pulses are shorter than roughly TRTprec /6, meaning thata precise adjustment of the pulse duration is not important toachieve control. On the other hand, for pulses longer thanTprec the control scheme is not viable. Figures 8 and 9 illus-trate two different strategies for pulse application. The firstconsists of applying all pulses with a certain fixed �� �as inSec. III C 6�, whereas the second strategy implies the appli-cation of only the first pulse with a strictly defined �� andthe rest of the pulses—with a time delay of a precessionalperiod. The second strategy allows only a freezing of themagnetization around certain �. Figure 10 depicts the dy-namics for a Co nanoparticle.41 Due to the large damping inthis case for switching, we need higher field amplitudes thanfor a FePt nanoparticle. For ��i=0 switching is achieved forall field amplitudes starting from b0
R=5.91. This procedurerequires however a more frequent pulse application �cf. Fig.11�. Figure 11 additionally reveals another important feature:For certain values of b0 one can fix both � and � in a short-
0
π/6
π/3
π/2
TR=3T
prec
0 10 20 30 40Time t, [T
prec]
0
π/6
π/3
π/2
TR=T
prec/6
Ang
leθ,
[rad
]
FIG. 7. �Color online� Evolution of ��t� for different pulse du-rations TR expressed in units of the precessional period. Appliedpulses are shown as solid rectangles. Other parameters: b0
R=0.3 and�=0.05.
0
π/4
π/2
3π/4
πb
0=2.95
b0=5.91
0 10 20 30 40Time t, [T
prec]
0
π/4
π/2
3π/4
πb
0=2.95
b0=5.91
Ang
leθ,
[rad
]
b0=8.86
b0=14.77 δφ
i=3π/2
b0=8.86
b0=14.77
δφ1=3π/2
R
R
R
R
R
R
R
R
FIG. 8. �Color online� Evolution ��t� for different strategies ofpulse application: rectangular pulses are applied when ��i=3� /2�top�; �lower panel�: only the first pulse is applied when ��1
=3� /2 other pulses are delayed by a precessional period. Otherparameters: �=0.05 and T0=0 K.
0
π/4
π/2
3π/4
πδφ
i=3π/2
Number of pulses = 14 (amplitude x5)
0 2 4 6 8 10 12 14 16 18 20Time t, [T
prec]
0
π/4π/2
3π/4
πδφ
i=0
Number of pulses = 26(amplitude x5)
Ang
leθ,
[rad
]
FIG. 6. �Color online� Evolution of ��t� for ��i=3� /2 and��i=0; � f�0�=� /180, � f�0�=� /180, �0=� /3, �=1.0, b0=0.2,and f�t0,i�=1.
0
π/4
π/2
3π/4
πb
0=2.95
b0=5.91
0 10 20 30 40Time t, [T
prec]
0
π/4
π/2
3π/4
πb
0=2.95
b0=5.91
Ang
leθ,
[rad
]
b0=8.86
b0=14.77
δφi=0
b0=8.86
b0=14.77
δφ1=0
R
R
R
R
R
R
R
R
FIG. 9. �Color online� Same as in Fig. 8 with the same condi-tions for upper and lower panel; however, ��i=0.
A. SUKHOV AND J. BERAKDAR PHYSICAL REVIEW B 79, 134433 �2009�
134433-6

time interval of approximately one precessional period. Thisrequires a very frequent pulse application. Note that this ef-fect, which we call “� freezing” can only be performed for��i=0 �Fig. 11, Eq. �14��. In case of ��i=3� /2 � freezingdid not arise whereas a certain stabilization of � angle wasobtained for low amplitudes. The � stabilization shown inFig. 8 for amplitudes smaller than b0
R=14.77 is similar to theeffect of Larmor precession. However, the former effect canbe obtained merely in a system without dissipation ��=0�.The � stabilization occurs due to a balance in energy contri-butions: the energy pumped into the system by the externalmagnetic field and the dissipated energy due to damping.Indeed, inspecting Fig. 3 and choosing a constant amplitudeof the applied pulse the balance of energies corresponds tothe point where the chosen field crosses the curve. Compar-ing the analytical predictions with the numerical ones wefind overall consistencies in results and trends. That the am-plitudes calculated analytically and numerically are differentis due to the different time delays, as addressed in Sec.III C 5. Furthermore, to compare b0 and b0
R one should con-trast time integrals of the pulses �i.e., the total field action onthe magnetization�, i.e., �−�
� b0
2�dt=b0�01 2�
2�d=b0 and �−�� b0
Rdt
=�ti−
ti+
b0Rdt=b0
R�ti+− ti
−�. Hence we deduce the relation between
b0 and b0R,
b0R =
b0
ti+ − ti
− . �22�
From this equation we can calculate the numerical criticalamplitude, e.g., for ��i=3� /2, �=0.05, and b0cr=0.05. Thenumerical value should be 0.05 / �6 /1000��8.3. From Fig. 8we can deduce that starting from approximately this valuesswitching is indeed possible; it takes, however, a longer time.
Figures 12 and 13 show the temperature-dependent timeevolution of ��t� for ��i=3� /2 and ��i=0, respectively.These figures differ merely in how long the pulses are ap-plied: for temperature-dependent calculations it is imperativethat the pulses are applied even if ��� /2 in order to avoidthe situation shown in Fig. 12 �lower panel, T1=56 K�, i.e.,after reaching the state �=� /2 the magnetization may returnback to the original state due to thermal excitations. Thiseffect is avoided by applying the pulses even if ��� /2 �Fig.13�.
From both figures we observe: during the pulse applica-tion even at rather high temperatures the dynamics for theshort magnetic pulses remains the same as for T=0 K. Thisis explainable by the relatively high and rapid �on the scaleof thermal excitations� excitation induced by the magnetic
π/2
π
b0=2.95
π/2 b0=5.91
π/2 b0=8.86
0 10 20 30 40Time t, [T
prec]
0
π/2 b0=17.72
Ang
leθ,
[ra d
]R
R
R
R
FIG. 10. �Color online� ��t� for a Co nanoparticle for ��i
=3� /2 and different field strengths. Other parameters: �=0.25 andT0=0 K.
0 1 2 3 4Time t, [T
prec]
0
π/4
π/2
3π/4
π
Ang
les
θ,φ,
[rad
] θφMagnetic pulses
FIG. 11. �Color online� Evolution of angles � and � for ��i
=0 and for the parameters of the black curve shown in Fig. 9 whereb0
R=2.95
0
π/4
π/2
3π/4
πT
0=0 K
T1=56 K
T2=280 K
T3=560 K
0 10 20 30 40Time t, [T
prec]
0
π/4
π/2
3π/43π/4
π
T0=0 K
T1=56 K
T2=280 K
T3=560 K
Ang
leθ,
[rad
]
δφi=3π/2
δφi=0
FIG. 12. �Color online� Temperature-dependent evolution ofangle � for ��i=3� /2 �above� and ��i=0 �below�. Pulses are ap-plied only when �� /2. Other parameters: �=0.05 and b0
R
=14.77.
0
π/4
π/2
3π/4
πT
0=0 K
T1=56 K
T2=280 K
T3=560 K
0 10 20 30 40Time t, [T
prec]
0
π/4
π/2
3π/43π/4
πT
0=0 K
T1=56 K
T2=280 K
T3=560 K
Ang
leθ,
[rad
] δφi=3π/2
δφi=0
FIG. 13. �Color online� Temperature-dependent evolution ofangle � for ��i=3� /2 �above� and ��i=0 �below�. Pulses are ap-plied even when ��� /2. Other parameters: �=0.05 and b0
R
=14.77.
STEERING MAGNETIZATION DYNAMICS OF… PHYSICAL REVIEW B 79, 134433 �2009�
134433-7

pulses. In the field-free regime the relaxation motion be-comes strongly modified by thermal fluctuations leading thusto a rather chaotic motion of the magnetization. As shownrecently by us,34 both the effects of thermal fluctuations andthe magnetization freezing, as realized within our presentscheme, can be combined to induce a fast �picoseconds� ther-mal switching which can be utilized for fast thermal sensor-ing.
B. Sequence of short magnetic Gaussian-shaped pulses
We inspect here the dynamics under the influence ofGaussian-type magnetic pulses, i.e., f�t�=2�e−�t − t0�2/T2
andEq. �3� becomes
b0G�t� = b0
Ge−�t − t0�2/T2�cos �0ex + sin �0ey� , �23�
where b0G is the field amplitude and TG=6 T is the pulse
duration centered at t0. In order to be able to compare theseresults with those obtained for rectangular-shaped pulses theamplitudes should be calculated from
b0R = b0
G��T
ti+ − ti
− , �24�
which ensures that the time integral over both pulses is thesame. Figure 14 depicts the dynamics for Gaussian-shapedmagnetic pulses. For the same time integrals the dynamicsfor long pulses �Fig. 7 and 14� differs. In particular, switch-ing might be obtained with only one Gaussian-type pulse.Short pulses for both rectangular- and Gaussian-shapedpulses have the same dynamical behavior �similar results areobtained in �Ref. 30�. Thus, when aiming to study the influ-ence of ultra short magnetic pulses there is no need to varythe shape of the pulses: the dynamics is the same.
C. Sequence of short magnetic pulses for a nanoparticle witha cubic anisotropy
The question of whether this scheme is valid for anotheranisotropy type is addressed in this subsection and depictedin Fig. 15. For a cubic anisotropy �Eq. �9�� switching can be
defined either as a reversal to the closest stable state or as areversal to the antiparallel state. We demonstrate within thescheme proposed that switching to the closest state is pos-sible and also into the negative semisphere by increasing thefield amplitudes. The magnetic pulses are only applied forthe fixed angular shift ��i=3� /2 and when �� /2. Thelight curves for nonzero amplitudes show a switching fromone stable orientation to another one. Note that when thepulses are applied the magnetization experiences a quasibal-listic switching.
V. CONCLUSIONS AND DISCUSSION
In this paper the dynamical behavior of the nanoparticle’smagnetization was studied on the basis of the Landau-Lifshitz-Gilbert equation of motion both analytically and nu-merically. A scheme was proposed specifying the conditionsunder which a controlled magnetization reversal is achieved.The analytical solution reveals the general dependencies. Ex-pressions are provided for the value of the magnetizationchange upon the pulse application and for the critical �mini-mal� field b0cr needed for switching. The dependencies ofb0cr on the damping parameter and the total field amplitudeas well as on the ratio of the applied field strengths are alsogiven. The scheme is universal in that it does not depend onthe type of magnetic anisotropy as long as the pulse isshorter that the precessional period. The field-free magneti-zation dynamics intervening the pulses is, however, aniso-tropy dependent. The finite-temperature numerical procedureendorsed the robustness of the analytical predictions to avariation in the duration of the pulses and to thermal fluctua-tions. The critical switching fields expressed in units of themaximum anisotropy field depend on the applied field-strength ratio contained in and on the damping parameter aswell as on the field-free time between pulses. Analytical ex-pressions for the critical field amplitudes are basically con-firmed numerically. For high field amplitudes less pulses areneeded for switching. Another feature of the present controlscheme is the magnetization freezing, i.e., for certain field-
π/2
π
TG
=3Tprec
π/2
π
TG
=Tprec
π/2
π
TG
=Tprec
/6
0 10 20 30 40Time t, [T
prec]
0
π/2
πT
G=T
prec/10
Ang
leθ,
[rad
]
FIG. 14. �Color online� Evolution of ��t� for different pulsedurations expressed in units of the precessional period. Applied �full“bells”� Gaussian pulses are shown. Other parameters: b0
G=1.0 and�=0.05.
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
φ
Energy
θ
-π -π/2 ππ/20
π
π/2
0
FIG. 15. �Color online� Trajectories of the magnetization on the�field-free� energy landscape corresponding to a cubic magnetic an-isotropy. Results for three amplitudes of magnetic pulses are shown:b0
R=0 �dark curve�, b0R=2.07 �light curve�, and b0
R=4.14 �lightpoints�. Start conditions are: � f�0�=15� /8, � f�0�=0.81, �0=� /4,T0=0 K, and �=0.05.
A. SUKHOV AND J. BERAKDAR PHYSICAL REVIEW B 79, 134433 �2009�
134433-8

amplitude strengths, which are given in explicit form; themagnetization can be steered to a predefined angular positionand roughly stabilized there. As for temperature effects, theyturned out to be of a minor importance during the pulseapplication. However, thermal fluctuations influence stronglythe relaxation process in between the pulses. For pulses witha duration shorter than the precessional period we confirmthe independence of the qualitative behavior of the magneti-zation dynamics on the pulse shapes.
Experimentally the proposed control scheme may be real-ized in an experimental setup similar to that reported in Ref.28. The pulse strength achieved in Ref. 28 can be as high as
some Tesla, the pulse duration however is somepicoseconds,27 which restricts the applicability of our schemeto certain materials with a longer precessional period. An-other promising possibility is the use light pulses �which canbe as short as attoseconds� to generate the required magneticfields.50–52
ACKNOWLEDGMENTS
This work is supported by the International Max PlanckResearch School for Science and Technology of Nanostruc-tures.
1 Spindynamics in Confined Magnetic Structures III, edited by B.Hillebrands and K. Ounadjela �Springer, Berlin, 2002�; Spin Dy-namics in Confined Magnetic Structures II, edited by B. Hill-ebrands and K. Ounadjela �Springer, Berlin, 2002�, and refer-ences therein.
2 Spin Dynamics in Confined Magnetic Structures I, edited by B.Hillebrands and K. Ounadjela �Springer, Berlin, 2002�.
3 Magnetic Nanostructures, Springer Series in Materials ScienceVol. 94 edited by B. Aktas, L. Tagirov, and F. Mikailov�Springer, New York, 2007�.
4 M. Vomir, L. H. F. Andrade, L. Guidoni, E. Beaurepaire, andJ.-Y. Bigot, Phys. Rev. Lett. 94, 237601 �2005�.
5 A. V. Kimel, A. Kirilyuk, P. A. Usachev, R. V. Pisarev, A. M.Balbashov, and Th. Rasing, Nature �London� 435, 655 �2005�.
6 C. A. Perroni and A. Liebsch, Phys. Rev. B 74, 134430 �2006�.7 E. C. Stoner and E. P. Wohlfarth, Philos. Trans. R. Soc. London,
Ser. A 240, 599 �1948�.8 L. He, W. D. Doyle, and H. Fujijava, IEEE Trans. Magn. 30,
4086 �1994�.9 G. Bertotti, C. Serpico, and I. D. Mayergoyz, Phys. Rev. Lett.
86, 724 �2001�.10 C. Thirion, W. Wernsdorfer, and D. Mailly, Nature Mater. 2, 524
�2003�.11 Y. Acremann, C. H. Back, M. Buess, O. Portmann, V. Vaterlaus,
D. Pescia, and H. Melchior, Science 290, 492 �2000�.12 G. Woltersdorf and C. H. Back, Phys. Rev. Lett. 99, 227207
�2007�.13 Y. Nozaki and K. Matsuyama, J. Appl. Phys. 100, 053911
�2006�.14 H. K. Lee and Z. Yuan, J. Appl. Phys. 101, 033903 �2007�.15 Z. Z. Sun and X. R. Wang, Phys. Rev. Lett. 97, 077205 �2006�.16 S. I. Denisov, T. V. Lyutyy, P. Hänggi, and K. N. Trohidou, Phys.
Rev. B 74, 104406 �2006�.17 Y. Nozaki, M. Ohta, S. Taharazako, K. Tateishi, S. Yoshimura,
and K. Matsuyama, Appl. Phys. Lett. 91, 082510 �2007�.18 J. Slonczewski, J. Magn. Magn. Mater. 159, L1 �1996�.19 L. Berger, Phys. Rev. B 54, 9353 �1996�.20 M. Tsoi, A. G. M. Jansen, J. Bass, W. C. Chiang, M. Seck, V.
Tsoi, and P. Wyder, Phys. Rev. Lett. 80, 4281 �1998�.21 E. B. Myers, D. C. Ralph, J. A. Katine, R. N. Louie, and R. A.
Buhrman, Science 285, 867 �1999�.22 Z. Li and S. Zhang, Phys. Rev. B 68, 024404 �2003�.23 S. Mangin, D. Ravelsona, J. A. Katine, M. J. Carey, B. D. Terris,
and E. E. Fullerton, Nature Mater. 5, 210 �2006�.24 X. R. Wang and Z. Z. Sun, Phys. Rev. Lett. 98, 077201 �2007�.25 Y. Tserkovnyak, A. Brataas, and G. E. W. Bauer, J. Magn. Magn.
Mater. 320, 1282 �2008�.26 L. He and W. D. Doyle, J. Appl. Phys. 79, 6489 �1996�.27 C. H. Back, D. Weller, J. Heidmann, D. Mauri, D. Guarisco, E.
L. Garwin, and H. C. Siegmann, Phys. Rev. Lett. 81, 3251�1998�.
28 C. H. Back and H. C. Siegmann, J. Magn. Magn. Mater. 200,774 �1999�.
29 T. Gerrits, H. A. M. van den Berg, J. Hohlfeld, L. Bär, and Th.Rasing, Nature �London� 418, 509 �2002�.
30 M. Bauer, J. Fassbender, B. Hillebrands, and R. L. Stamps, Phys.Rev. B 61, 3410 �2000�.
31 H. Xi, K. Z. Gao, and S. Xue, J. Appl. Phys. 103, 07F502�2008�; P. P. Horley, V. R. Vieira, P. M. Gorley, V. K. Dugaev, J.Berakdar, and J. Barnas, Phys. Rev. B 78, 054417 �2008�.
32 H. W. Schumacher, C. Chappert, R. C. Sousa, P. P. Freitas, and J.Miltat, Phys. Rev. Lett. 90, 017204 �2003�.
33 C. H. Back, R. Allenspach, W. Weber, S. S. P. Parkin, D. Weller,E. L. Garwin, and H. C. Siegmann, Science 285, 864 �1999�.
34 A. Sukhov and J. Berakdar, Phys. Rev. Lett. 102, 057204�2009�.
35 R. Kosloff, A. D. Hammerich, and D. J. Tannor, Phys. Rev. Lett.69, 2172 �1992�.
36 S. Gräfe, C. Meier, and V. Engel, J. Chem. Phys. 122, 184103�2005�.
37 P. Marquetand and V. Engel, J. Phys. B 41, 074026 �2008�.38 M. Shapiro and P. Brumer, Principles of Quantum Control of
Molecular Processes �Wiley, New York, 2003�.39 D. J. Tannor, Introduction to Quantum Mechanics: A Time-
dependent Perspective �University Science Books, New York,2007�, and references therein.
40 C. Antoniak, J. Lindner, M. Spasova, D. Sudfeld, M. Acet, M.Farle, K. Fauth, U. Wiedwald, H. G. Boyen, P. Ziemann, F.Wilhelm, A. Rogalev, and S. Sun, Phys. Rev. Lett. 97, 117201�2006�.
41 W. T. Coffey, D. S. F. Crothers, J. L. Dormann, Yu. P. Kalmykov,E. C. Kennedy, and W. Wernsdorfer, Phys. Rev. Lett. 80, 5655�1998�.
42 C. Antoniak, J. Lindner, and M. Farle, Europhys. Lett. 70, 250�2005�.
43 L. Landau and E. Lifshitz, Phys. Z. Sowjetunion 8, 153 �1935�.
STEERING MAGNETIZATION DYNAMICS OF… PHYSICAL REVIEW B 79, 134433 �2009�
134433-9

44 T. L. Gilbert, Phys. Rev. 100, 1243 �1955� �Abstract only; fullreport, Armor Research Foundation Project No. A059, Supple-mentary Report, May 1, 1956� �unpublished�; IEEE Trans.Magn. 40, 3443 �2004�.
45 A. Sukhov and J. Berakdar, J. Phys.: Condens. Mater 20,125226 �2008�.
46 Z. Z. Sun and X. R. Wang, Phys. Rev. B 71, 174430 �2005�.47 J. L. García-Palacios and F. J. Lázaro, Phys. Rev. B 58, 14937
�1998�.
48 Physics of Ferromagnetism S. Chikazumi �Oxford UniversityPress, New York, 1997�, p. 250.
49 I. Mayergoyz, M. Dimian, G. Bertotti, and C. Serpico, J. Appl.Phys. 97, 10A703 �2005�.
50 A. S. Moskalenko, A. Matos-Abiague, and J. Berakdar, Phys.Rev. B 74, 161303�R� �2006�.
51 T. Lehner, Europhys. Lett. 50, 480 �2000�.52 J. C. Mallinson, IEEE Trans. Magn. 36, 1976 �2000�.
A. SUKHOV AND J. BERAKDAR PHYSICAL REVIEW B 79, 134433 �2009�
134433-10