State estimation for wastewater treatment plant with slow ...
25
CRAN A. NAGY KISS , G.MOUROT, B. MARX, J. RAGOT, G. SCHUTZ Introduction Interests to use the Multiple Model What is the Multiple Model ? State estimation method Identification of slow and fast dynamics Singularly perturbed systems Unknown input observer Wastewater treatment Process and the reduced ASM1 model Slow and fast dynamics Estimation results Conclusions and Future State estimation for wastewater treatment plant with slow and fast dynamics using multiple models A. NAGY KISS , G.MOUROT, B. MARX, J. RAGOT, G. SCHUTZ 18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 1/ 25
Transcript of State estimation for wastewater treatment plant with slow ...

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
State estimation for wastewatertreatment plant with slow and fastdynamics using multiple models
A. NAGY KISS, G.MOUROT, B. MARX, J. RAGOT, G. SCHUTZ
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 1/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Purposes and problematics
Objectives
1. Propose a state estimation method for two-time scale systems usingMultiple Models (MM)
2. Apply it to an activated sludge model reactor
Interests
1. Ability to use the convexity properties of the MM in order to designobservers and control laws for system diagnosis purpose
Motivation
1. Difficulty to deal with the modeling complexity of nonlinear systems
2. Difficulty to model a process under the singularly perturbed systems
3. Existence of multiple time scale dynamics : identification andseparation
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 2/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Outline
IntroductionInterests to use the Multiple ModelWhat is the Multiple Model ?
State estimation methodIdentification of slow and fast dynamicsSingularly perturbed systemsUnknown input observer
Wastewater treatmentProcess and the reduced ASM1 modelSlow and fast dynamicsEstimation results
Conclusions and Future prospects
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 3/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Introduction
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 4/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
The interest to use the Multiple Models
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 5/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
What is the Multiple Model ?
Dynamical system described by a Multiple Model
x(t) =r
∑
i=1µi(x(t), u(t)) [Ai x(t) + Bi u(t)]
y(t) =r
∑
i=1µi(x(t), u(t)) [Ci x(t) + Di u(t)]
r∑
i=1µi(x , u) = 1 and µi(x , u) ≥ 0
Interest : this form is particularly attractive for
- stability- stabilization- observability studies- state estimation- diagnosis
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 6/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
State estimation method
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 7/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Identification of slow and fast dynamics
Homotopy methodLinearization : x(t) = f (x(t), u(t)) =⇒ x(t) = A0x(t) + B0u(t)
A0 = ∂f (x,u)∂x
∣
∣
(x0,u0) , B0 = ∂f (x,u)∂u
∣
∣
(x0,u0)
Order and separate the eigenvalues of A0 : τ - threshold of separation
x =
[
xF
xS
]
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 8/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Singularly perturbed systems
Standard form
ǫ xF (t) = fF (xS(t), xF (t), u(t), ǫ) (1a)
xS(t) = fS(xS(t), xF (t), u(t), ǫ) (1b)
where ǫ - singular perturbed parameter
Reduced form : ǫ −→ 0
0 = fF (xS(t), xF (t), u(t), 0) (2a)
xS(t) = fS(xS(t), xF (t), u(t), 0) (2b)
Difficulties :
◮ transform a NL system into the singularly perturbed form◮ obtain ǫ
If possible (for particular cases of SNL), then :◮ resolution of the algebraic system (2a) extract xF and replace it in (2b)
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 9/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Singularly perturbed systems
Two-time scales
[
xF (t)xS(t)
]
=
[ 1ǫ
fF (xS(t), xF (t), u(t), ǫ)
fS(xS(t), xF (t), u(t), ǫ)
]
y(t) = C[
xF (t)xS(t)
]
equivalent transformation m sector nonlinearity approach
Multiple model
[
xF (t)xS(t)
]
=r
∑
i=1
µi(xS , xF , u)
{[
AiFF Ai
FS
AiSF Ai
SS
]
·
[
xF (t)xS(t)
]
+
[
B iF
B iS
]
u}
y(t) = C[
xF (t)xS(t)
]
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 10/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Singularly perturbed systems
Consider xF as unknown input : d(t) = xF (t)
x(t) =
[
d(t)xS(t)
]
Design the matrices :
Ai =
[
AiFF Ai
FS
0 AiSS
]
Ei =
[
0Ai
SF
]
CS =[
0 CS]
x(t) =r
∑
i=1µi(x , u) ·
[
Ai x(t) + Bi u(t) + Ei d(t)]
y(t) = CS x(t) + CF d(t)
(3)
◮ Decoupled time scales◮ The estimation of xS is made independently of xF
◮ Classic structure of MM affected by unknown inputs◮ Unmeasurable decision variables
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 11/ 25
CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
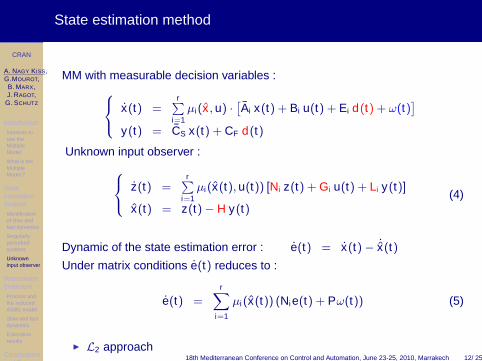
State estimation method
MM with measurable decision variables :
x(t) =r
∑
i=1µi(x , u) ·
[
Ai x(t) + Bi u(t) + Ei d(t) + ω(t)]
y(t) = CS x(t) + CF d(t)
Unknown input observer :
z(t) =r
∑
i=1µi(x(t), u(t)) [Ni z(t) + Gi u(t) + Li y(t)]
x(t) = z(t) − H y(t)(4)
Dynamic of the state estimation error : e(t) = x(t) − ˙x(t)
Under matrix conditions e(t) reduces to :
e(t) =r
∑
i=1
µi(x(t)) (Nie(t) + Pω(t)) (5)
◮ L2 approach18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 12/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Unknown input observer
Theorem : e(t) → 0 if ∃ X, Mi and S and a positive scalar λ s.t. thefollowing conditions are respected ∀ i = 1, ..., r :
[
ATi (X + SCS)T + (X + SCS)Ai − CT
S MTi − Mi CS + I X + SCS
(X + SCS)T−λI
]
< 0
SCF = 0
(X + SCS)Ei = Mi CF
The observer matrices
H = X−1S
Ni = (I + HCS)Ai − X−1Mi CS (6)
Li = X−1Mi − NiH
Gi = (I + HCS)Bi
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 13/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Wastewater treatment
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 14/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Wastewater treatment
The diagram of the wastewater treatment plant process
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 15/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Wastewater treatment
The diagram of the set biological reactor + clarifier
1. The operating mode : constant volume
qout = qin + qR
2. Model : a part of ASM1 −→ carbonated pollution
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 16/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Wastewater treatment
The reduced ASM1 model : biological reactor
Simplification hypothesis :
XBH,out(t) = XBH(t)
SS,out(t) = SS(t)
SO,out(t) = SO(t)
SO,in(t) = 0
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 17/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Wastewater treatment
The diagram of the set biological reactor + clarifier
1. Clarifier (qin + qR)XBH = (qW + qR)XBH,R
SS,R = SS
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 18/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Wastewater treatment
The reduced ASM1 model
SS =qin
V(SS,in − SS) + (1 − f )bHXBH −
µH
YH
SS
KS + SS
SO
KOH + SOXBH
SO = −qin
VSO + K qa (SO,sat − SO) −
1 − YH
YHµH
SS
KS + SS
SO
KOH + SOXBH
XBH =qin
VXBH,in −
qW
Vqin + qR
qW + qRXBH + µH
SS
KS + SS
SO
KOH + SOXBH − bHXBH
x =
SS
SO
XBH
u =
SS,in
qa
XBH,in
Constants parameters : θ = (µH , bH , f , YH , SO,sat , KS, KOH , K )
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 19/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Slow and fast dynamics
0 5 10 15 20 25 30 35 40−250
−200
−150
−100
−50
−0.5
Operating points index
Jaco
bian
eig
enva
lues
λ1 (S
S)
λ2 (S
O)
λ3 (X
BH)
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 20/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
State estimation results
0 2 4 6 8 100
50
100
150
200
g/m
3
SS
SS,estimated
0 2 4 6 8 100
1
2
3g/
m3
SO
SO,estimated
0 2 4 6 8 10600
800
1000
1200
1400
time(h)
g/m
3
XBH
XBH,estimated
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 21/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Output estimation results
0 2 4 6 8 100
1
2
3
4
0 2 4 6 8 100
50
100
150
200
y1
y1 estimated
y2
y2 estimated
time (h)
g/m
3 g/
m3
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 22/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Conclusions and Future prospects
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 23/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Conclusions and Future prospects
Conclusions
1. Identification of slow and fast dynamics
2. Usage of MM with two time scales
3. State estimation using an unknown input observer and MM
4. Application to a part of the ASM1 model of a wastewater treatment plant
Future prospects
Using the Multiple Model form
1. System Diagnosis :
- detect- isolate faults- identify
2. Apply to wastewater treatment plant model
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 24/ 25

CRAN
A. NAGY KISS,G.MOUROT,B. MARX,J. RAGOT,
G. SCHUTZ
IntroductionInterests touse theMultipleModel
What is theMultipleModel ?
StateestimationmethodIdentificationof slow andfast dynamics
Singularlyperturbedsystems
Unknowninput observer
WastewatertreatmentProcess andthe reducedASM1 model
Slow and fastdynamics
Estimationresults
Conclusionsand Future
Thank you for your attention
18th Mediterranean Conference on Control and Automation, June 23-25, 2010, Marrakech 25/ 25