Stability properties of steady water waves with vorticity
40
Stability Properties of Steady Water Waves with Vorticity ADRIAN CONSTANTIN Trinity College Dublin AND WALTER A. STRAUSS Brown University Abstract We present two stability analyses for exact periodic traveling water waves with vorticity. The first approach leads in particular to linear stability properties of water waves for which the vorticity decreases with depth. The second approach leads to a formal stability property for long water waves that have small vorticity and amplitude although we do not use a small-amplitude or long-wave approxi- mation. c 2006 Wiley Periodicals, Inc. 1 Introduction Water waves are generally expected to be unstable. However, in several approx- imate models, such as Korteweg–de Vries, they enjoy remarkable stability proper- ties. Thus the full water-wave equations ought to possess some vestige of these stability properties. This is what we investigate in this article. We do not make any small-amplitude or shallow-water (long-wave) approximation but consider the full two-dimensional periodic water wave problem, which consists of the Euler equations under the influence of gravity with the classical dynamic and kinematic boundary conditions on the free surface. We present two quite different approaches to stability. In the first one, we begin with a temporally invariant functional H, which is the energy suitably modified by a vorticity term and subject to mass and momentum constraints. Following [6], its first variation gives the full water-wave equations including the boundary conditions, provided the vorticity is a strictly decreasing function of the depth. Thus irrotational flow is excluded from this analysis. We easily calculate its second variation around a steady flow under general perturbations of the same period. It is positive, and the water wave is linearly stable, if either (i) the surface is unperturbed or (ii) the velocity on the surface is perturbed only normally or (iii) the tangential velocity is a sufficiently small perturbation. Our second approach to stability has a very different point of departure. We take another functional, which is essentially the dual of H but is not an invariant. It is then transformed following [8] by essentially exchanging the roles of the vertical Communications on Pure and Applied Mathematics, Vol. LX, 0911–0950 (2007) c 2006 Wiley Periodicals, Inc.
-
Upload
adrian-constantin -
Category
Documents
-
view
214 -
download
1
Transcript of Stability properties of steady water waves with vorticity

Stability Properties of Steady Water Waves with Vorticity
ADRIAN CONSTANTINTrinity College Dublin
AND
WALTER A. STRAUSSBrown University
Abstract
We present two stability analyses for exact periodic traveling water waves with
vorticity. The first approach leads in particular to linear stability properties of
water waves for which the vorticity decreases with depth. The second approach
leads to a formal stability property for long water waves that have small vorticity
and amplitude although we do not use a small-amplitude or long-wave approxi-
mation. c© 2006 Wiley Periodicals, Inc.
1 Introduction
Water waves are generally expected to be unstable. However, in several approx-
imate models, such as Korteweg–de Vries, they enjoy remarkable stability proper-
ties. Thus the full water-wave equations ought to possess some vestige of these
stability properties. This is what we investigate in this article. We do not make
any small-amplitude or shallow-water (long-wave) approximation but consider the
full two-dimensional periodic water wave problem, which consists of the Euler
equations under the influence of gravity with the classical dynamic and kinematic
boundary conditions on the free surface.
We present two quite different approaches to stability. In the first one, we begin
with a temporally invariant functional H, which is the energy suitably modified
by a vorticity term and subject to mass and momentum constraints. Following
[6], its first variation gives the full water-wave equations including the boundary
conditions, provided the vorticity is a strictly decreasing function of the depth.
Thus irrotational flow is excluded from this analysis. We easily calculate its second
variation around a steady flow under general perturbations of the same period. It is
positive, and the water wave is linearly stable, if either (i) the surface is unperturbed
or (ii) the velocity on the surface is perturbed only normally or (iii) the tangential
velocity is a sufficiently small perturbation.
Our second approach to stability has a very different point of departure. We
take another functional, which is essentially the dual of H but is not an invariant. It
is then transformed following [8] by essentially exchanging the roles of the vertical
Communications on Pure and Applied Mathematics, Vol. LX, 0911–0950 (2007)c© 2006 Wiley Periodicals, Inc.

912 A. CONSTANTIN AND W. A. STRAUSS
variable y and the stream function ψ . The first variation of the functional J then
gives the exact equations for steady water waves in the transformed variables. It
is these equations that were used in [7, 8] to construct global continua of steady
water waves. There is a curve of trivial solutions with flat surface profiles and
also a pitchfork bifurcating curve C of nontrivial solutions. The stability of the
trivial solutions switches exactly at the bifurcation point. We prove an “exchange of
stability” theorem, namely, that the second variation of J , the linearized operator,
is positive along C provided that both the depth and the vorticity are sufficiently
small. This result is proven using the classical Crandall-Rabinowitz theorem [9]
together with a tedious explicit computation of derivatives at the bifurcation point.
It appears to be a new result even in the irrotational case.
There is an immense literature that deals with small-amplitude, shallow-water
models of water waves, such as the Korteweg–deVries equation. A modern discus-
sion of such approximations can be found in [13]. Some of these model equations
are integrable Hamiltonian systems whose periodic steady solutions are remark-
ably stable (see, e.g., [14, 17]). In this paper we do not discuss such approximate
models. However, the models suggest that some stability properties might carry
over to the full water-wave equations.
Several authors have discussed the stability of water waves. All of them con-
sider only the irrotational case. The most significant analysis is that of Benjamin
and Feir [2], who assumed a small-amplitude approximation in the irrotational case
and showed that there always is a “sideband” instability, meaning that the pertur-
bation has a different period than the steady wave. Their work was made mathe-
matically rigorous by Bridges and Mielke [3]. On the other hand, in the present
paper we only consider perturbations of the same period as the steady wave.
Zakharov [19] and MacKay and Saffman [16] discussed linear stability for the
Hamiltonian system that arises with the use of the velocity potential in the irrota-
tional case. Such a formulation is not available in the presence of vorticity. Further-
more, their analysis made heavy use of a small-amplitude approximation. Mielke
[18] and Buffoni [4] used the same Hamiltonian structure to rigorously prove the
nonlinear stability of exact irrotational solitary (not periodic) water waves under
the assumption that there is nontrivial surface tension (capillary waves). It is well-
known that surface tension has a stabilizing influence. Measurements of physical
water waves show that surface tension is usually quite small or negligible. In the
present paper we consider waves with vanishing surface tension.
After fixing our notation in Section 2, we compute in Section 3 the second
variation of the temporal invariant H, which leads to a brief discussion of linear
stability. In the much simpler case of a fixed boundary, our calculation reduces
to that of Arnold [1]. In Section 4 we consider the transformed problem and the
functional J . We discuss its relationship to bifurcation theory and compute the
second variation of J near the bifurcation point for small vorticity. This leads to
our conclusions concerning formal stability.

STABILITY PROPERTIES OF STEADY WATER WAVES 913
2 Preliminaries
The water waves that one typically sees propagating on the surface of a body
of water are, as a matter of common experience, locally approximately periodic
and two-dimensional. That is, the motion is identical in any direction parallel to
the crest line. To describe such waves it suffices to consider a cross section of
the flow that is perpendicular to the crest line. Choose coordinates (x, y) with the
y-axis pointing vertically upwards, the x-axis horizontal, and the origin at mean
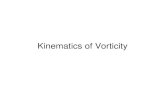
water level. Let (u(t, x, y), v(t, x, y)) be the velocity field of the flow, y = −d
the flat bed, and y = η(t, x) the free surface (Figure 2.1). Homogeneity (constant
density), a physically reasonable assumption for gravity waves [15], implies the
equation of mass conservation
(2.1) ux + vy = 0.
Also appropriate for gravity waves is the assumption of inviscid flow [12], so that
the motion of the water is given by Euler’s equation
(2.2)
{ut + uux + vuy = −Px
vt + uvx + vvy = −Py − g,
where P(t, x, y) denotes the pressure and g the gravitational constant. The free
surface decouples the motion of the water from that of the air so that the dynamic
boundary condition
(2.3) P = P0 on y = η(t, x)
holds in the absence of surface tension, where P0 is the atmospheric pressure.
Moreover, since the same particles always form the free surface, we have the kine-
matic boundary condition
(2.4) v = ηt + uηx on y = η(t, x).
On the flat bed we have the kinematic boundary condition
(2.5) v = 0 on y = −d,
expressing the fact that the bed is impenetrable.
We assume the flow is periodic in the sense that the velocity field (u, v), the
pressure P , and the free surface η all have period (wavelength) L in the x-variable.
Let
�(t) = {(x, y) ∈ R2 : 0 < x < L , −d < y < η(t, x)}
denote the fluid domain within a wavelength at time t ≥ 0. We assume that u, v,
P , and η are all C2 in the variables (t, x, y) as (x, y) ∈ �(t) where t varies in
some interval [0, T ) with T > 0. The incompressibility condition (2.1) enables us
to introduce a stream function ψ(t, x, y) defined up to a constant by
(2.6) ψx = −v, ψy = u.
Thus �ψ = −ω where ω = vx − uy is the vorticity.

914 A. CONSTANTIN AND W. A. STRAUSS
y
L
y= η (t, x)
x
− d
0
FIGURE 2.1. The profile of a steady periodic wave.
Among the periodic waves there are the steady periodic waves that travel at a
given wave speed c > 0; that is, they depend only on x − ct and y. On S the
function ψ − cy is constant. We can choose this constant arbitrarily; we choose
ψ − cy = 0 on S. For such waves Euler’s equation (2.2) implies that ψ − cy and
ω are functionally dependent since their gradients are parallel. For simplicity, we
assume that this functional dependence is global; that is, there exists a C1 function
γ , called the vorticity function, such that
(2.7) −�ψ = ω = γ (ψ − cy)
throughout the fluid. The dependence is global if, for instance, the steady wave sat-
isfies the condition u < c throughout the fluid domain [8]. In this paper we assume
this condition, which is physically justified by measurements for water waves that
are not near breaking [15]. Then the governing equations can be reformulated in
the moving frame as
(2.8)
�ψ = −γ (ψ − cy) on − d < y < η(x)
|∇(ψ − cy)|2 + 2 g(y + d) = Q at y = η(x)
ψ − cy = 0 at y = η(x)
ψ − cy = p0 at y = −d,
where p0 is a constant. This constant p0 = ∫ η(x)
−d(u − c) dy, which is independent
of x , is called the relative mass flux. The nonlinear boundary condition at y =η(x) is an expression of Bernoulli’s law. The constant Q can be expressed as
Q = 2(E + gd), where E is the hydraulic head of the flow. For more details we
refer to [8].

STABILITY PROPERTIES OF STEADY WATER WAVES 915
Among the conservation laws for the governing equations (2.1)–(2.5) are the
total energy
(2.9) E =∫∫�(t)
[u2 + v2
2+ g(y + d)
]dy dx,
the mass
(2.10) m =∫∫�(t)
dy dx,
the horizontal component of the momentum
(2.11) M =∫∫�(t)
u dy dx,
and
(2.12) F =∫∫�(t)
F(ω)dy dx
for any C1-function F (see [6]).
3 Linear Stability
Consider periodic steady two-dimensional waves as described above. Let F :R → R be any C2-function for which F ′′ < 0. That is, F is strictly concave. We
define the C1-function γ by
(3.1) γ = (F ′)−1.
Now the stream function ψ and the free surface profile η completely determine the
steady flow. Since ψy < c throughout the fluid domain, the strict concavity of F is
equivalent to the condition γ ′ < 0 or, in view of (2.7), to ωy > 0. The functionals
E , F , m, and M may be written entirely in terms of ψ and η. They are defined on
the space of functions
(ψ, η) ∈ C2per(R × [−d,∞)) × C1
per(R)
that are smooth with period L in the variable x . Note that ψ(x, y) is defined for
−d ≤ y < ∞, part of which lies above the fluid domain. Normally ψ and η are
coupled via the boundary conditions. However, if the existence of a critical point
is not an issue, then we can extend a smooth stream function across a smooth free
boundary, and we are allowed to consider independent variations with respect to
these two functions. Let � = {(x, y) | −d < y < η(x), 0 < x < L} denote the
fluid domain.

916 A. CONSTANTIN AND W. A. STRAUSS
3.1 Variations of the Constrained Energy
In [6] we proved that any critical point of E − F , subject to the constraints of
fixed mass m and horizontal momentum M, is a steady water wave with vorticity
function γ . When one identifies the Lagrange multipliers, the functional of which
we take variations is
(3.2) H(ψ, η) =∫∫�
{ |∇(ψ − cy)|22
+ g(y + d) − Q
2− F(−�ψ)
}dy dx .
Now we calculate the second variation. Beginning with a critical point (ψ, η), we
denote a pair of variations of ψ by ψ1 and ψ2, and similarly for variations of η.
Furthermore, we denote ω = −�ψ , ω1 = −�ψ1, and ω2 = −�ψ2.
THEOREM 3.1 The second variation of H is
δ2H =∫S
(∂ψ
∂y− c
){∂ψ2
∂nη1 + ∂ψ1
∂nη2
}dl
+∫∫�
{∇ψ2 · ∇ψ1 − F ′′(ω)ω1ω2
}dy dx
+∫S
{g + 1
2
∂
∂y[|∇(ψ − cy)|2]
}η1η2 dx .
PROOF: The first variation was calculated in [6] as δH = δI + δII + δIII where
δI =∫∫�
{(ψ − cy)ω1 − F ′(ω)ω1}dy dx,
δII =∫S
{ |∇(ψ − cy)|22
+ g(y + d) − Q
2− F(ω)
}η1 dx
and
δIII =∫S
(ψ − cy)∂ψ1
∂ndl −
∫B
(ψ + cd)∂ψ1
∂ydx .
Starting from these formulas for the first variation, we calculate another varia-
tion of each term. First,
δ2I =∫∫�
{ψ2ω1 − F ′′(ω)ω2ω1}dy dx +∫S
{(ψ − cy)ω1 − F ′(ω)ω1}η2 dx .
A common factor in the last integrand is ψ − cy = F ′(ω) = 0 on S. So the whole
surface integral vanishes. Writing ω1 = −�ψ1, we integrate the first term by parts

STABILITY PROPERTIES OF STEADY WATER WAVES 917
and thereby obtain
δ2I =∫∫�
{∇ψ2 · ∇ψ1 − F ′′(ω)ω2ω1}dy dx −∫S
ψ2
∂ψ1
∂ndl +
∫B
ψ2
∂ψ1
∂ydx .
In the calculations below, it is convenient to notice that
δ
∫S
f dx =∫S
(δ f + ∂ f
∂yδη
)dx .
The second part of our second variation is
δ2II =∫S
{∇(ψ − cy) · ∇ψ2 − F ′(ω)ω2}η1 dx
+∫S
{∇(ψ − cy) · ∇(ψy − c) + g − F ′(ω)ωy}η2η1 dx .
But F ′(ω) = ψ − cy = 0 on S and
∇(ψ − cy) · ∇ψ2 dx = (ψy − c)(−ηxψ2x + ψ2y)dx = (ψy − c)∂ψ2
∂ndl
so that
δ2II =∫S
(ψy − c)∂ψ2
∂nη1 dl +
∫S
{[1
2|∇(ψ − cy)|2
]y
+ g
}η2η1 dx .
The third part reduces to
δ2III =∫S
{ψ2 + (ψy − c)η2}∂ψ1
∂ndl −
∫B
ψ2
∂ψ1
∂ydx
because all the other terms are integrals over S with the factor ψ − cy, which
vanishes on S. Combining all the terms, we obtain
δ2H =∫∫�
{∇ψ2 · ∇ψ1 − F ′′(ω)ω2ω1}dy dx
+∫S
{[1
2|∇(ψ − cy)|2
]y
+ g
}η2η1 dx
+∫S
(ψy − c)
{∂ψ2
∂nη1 + ∂ψ1
∂nη2
}dl
because of the cancellation of the terms ± ∫Sψ2(∂ψ1/∂n)dl from δ2I and δ2III, as
well as the integrals on the bottom. �

918 A. CONSTANTIN AND W. A. STRAUSS
Our goal is to find conditions under which this symmetric quadratic form is
nonnegative. For this purpose we take ψ1 = ψ2 and η1 = η2. Then
δ2H =∫∫�
{|∇ψ2|2 − F ′′(ω)|ω2|2}dy dx
+∫S
{[1
2|∇(ψ − cy)|2
]y
+ g
}|η2|2 dx + 2
∫S
(ψy − c)∂ψ2
∂nη2 dl.
(3.3)
By the concavity of F , which follows from the assumption that γ ′ < 0, the first
integral is nonnegative.
3.2 Stability Conditions
By linear stability of the traveling wave (ψ, η) we mean that the quadratic form
δ2H is nonnegative. As above, we assume that u = ψy < c in �. The following
lemma states that the second integral in (3.3) is positive. Recall [8] that if
(p) =∫ p
0
γ (−s)ds for p ∈ [p0, 0],
then Bernoulli’s law ensures that the quantity
1
2|∇(ψ − cy)|2 + gy + P − (cy − ψ)
is constant throughout the fluid domain �.
LEMMA 3.2 On S we have
{P − (cy − ψ)}y < 0
if also γ (p0) ≥ 0.
PROOF: Using the basic equation −�ψ = ω = γ (ψ − cy) satisfied by ψ , we
calculate {1
2|∇(ψ − cy)|2
}y
+ g
= g + ψxψxy + (ψy − c)ψyy
= g + ψxψxy − (ψy − c)ψxx − (ψy − c)γ (ψ − cy).
(3.4)
However, the vertical component of the Euler equation is
−Py = g + vt + uvx + vvy = g + ψxψxy − (ψy − c)ψxx .
So {1
2|∇(ψ − cy)|2
}y
+ g = −Py − (ψy − c)γ (ψ − cy)
= −{P − (cy − ψ)}y .
(3.5)

STABILITY PROPERTIES OF STEADY WATER WAVES 919
On the other hand, the Euler equation also implies
�P = −2v2y − 2uyvx = −2ψ2
xy − ψ2xx − ψ2
yy + (�ψ)2
so that
�{P − (cy − ψ)} = [γ (ψ − cy)]2 − ψ2xx − ψ2
yy − 2ψ2xy
+ γ ′(ψ − cy)|∇(ψ − cy)|2 + γ (ψ − cy)�ψ
= −ψ2xx − ψ2
yy − 2ψ2xy + γ ′(ψ − cy) |∇(ψ − cy)|2 ≤ 0
because γ is decreasing. Thus P − (cy − ψ) is superharmonic and its minimum
can only be attained on the top S or bottom B (unless it is a constant); cf. [10].
On the bottom we have ψx = v = 0 and ψ − cy = p0, so that by (3.4)–(3.5)
−{P − (cy − ψ)}y = g + ψxψxy − (ψy − c)[ψxx + γ (ψ − cy)]= g − (u − c)γ (p0).
Since u < c by assumption, this expression is strictly positive if γ (p0) ≥ 0. Thus
the minimum of P − (cy − ψ) must be attained on S.
However, this function is a constant on S so that it is minimized at every point
of S. Therefore
0 > {P − (cy − ψ)}y
∣∣S
= −{
1
2|∇(ψ − cy)|2
}y
∣∣∣∣S
− g
by the Hopf form of the maximum principle [10] and by (3.5). �
Another way to state Lemma 3.2 is that the upward normal derivative on S of
P − (cy − ψ) is negative.
We remark that Lemma 3.2 is also true if −γ (p0)(c − u(q, p0)) < g instead of
γ (p0) ≥ 0. This is evident by inspection of the above proof.
The above considerations lead to the following stability result under smooth
perturbations supported in a neighborhood of the free surface S = {y = η(x)} and
periodic in x :
THEOREM 3.3 Assume that ωy > 0 and γ (−p0) ≥ 0. Then
(i) Any traveling wave is linearly stable if the surface is unperturbed.
(ii) Any traveling wave is linearly stable if the velocity on the surface is per-
turbed only normally.
(iii) Any traveling wave is linearly stable provided the velocity on the surface is
perturbed only tangentially and |u −c| is uniformly sufficiently small on S.
(iv) Any traveling wave is linearly stable under perturbations (ψ2, η2) satisfy-
ing the inequality
(3.6)
∫S
∣∣∣∣∂ψ2
∂n
∣∣∣∣2
dl ≤ µ2
∫S
|ψ2|2 dl
provided µ = supS {|u − c|} is sufficiently small.

920 A. CONSTANTIN AND W. A. STRAUSS
PROOF: As already pointed out, the hypothesis ωy > 0 is equivalent to F ′′ < 0
and to γ ′ < 0. By Lemma 3.2 the first and second integrals in (3.3) are nonnegative.
For the surface to be unperturbed, it means that η2 = 0, whence only the first
integral in (3.3) remains and therefore δ2H ≥ 0. This proves (i).
For the velocity on the surface to be perturbed only normally, it means that
the tangential component of the velocity perturbation vanishes. But this means
that ∂ψ2/∂n = 0 on S. Therefore the third term in (3.3) vanishes. Once again,
δ2H ≥ 0. This proves (ii).
The velocity on the surface is perturbed only tangentially if and only if the
normal component of the velocity perturbation vanishes, that is, ∂ψ2/∂τ = 0 on
S. This is equivalent to the requirement that ψ2 be constant on S. To prove (iii) we
will estimate the third term in (3.3) by the others. Define
a = supS
{|ψy − c|}, b = infS
12(|∇(ψ − cy)|2)y + g√
1 + η2x
, θ = supp∈[p0,0]
|γ ′(p)|.
Then
δ2H ≥∫∫�
|∇ψ2|2 dy dx + b
∫S
η22 dl + 1
θ
∫∫�
|�ψ2|2 dy dx
− 2a
∫S
∣∣∣∣∂ψ2
∂n
∣∣∣∣ |η2|dl
≥∫∫�
|∇ψ2|2 dy dx + 1
θ
∫∫�
|�ψ2|2 dy dx − a2
b
∫S
∣∣∣∣∂ψ2
∂n
∣∣∣∣2
dl ≥ 0,
if a is sufficiently small, by the standard trace inequality applied to ∇ψ2.
To prove (iv), with the same notation, observe that
δ2H ≥∫∫�
|∇ψ2|2 dy dx + b
∫S
η22 dl − 2a
∫S
∣∣∣∣∂ψ2
∂n
∣∣∣∣ |η2|dl
≥∫∫�
|∇ψ2|2 dy dx − a2
b
∫S
∣∣∣∣∂ψ2
∂n
∣∣∣∣2
dl
≥∫∫�
|∇ψ2|2 dy dx − a2µ2
b
∫S
|ψ2|2 dl ≥ 0
by the standard trace inequality (noting that ψ2 = 0 on B), provided aµ is small
enough. �
Example 1. The smallness conditions in Theorem 3.3(iii) and (iv) apply to certain
trivial solutions. Indeed, for trivial flows with a flat surface S = {y = 0} and

STABILITY PROPERTIES OF STEADY WATER WAVES 921
velocity components independent of x and with u < c, γ (0) = 0, and γ ′ < 0, we
have
(c − ψy)∣∣
S=
√λ > 0,
1
2[|∇(ψ − cy)|2]y
∣∣S+ g = ψyy(ψy − c)
∣∣S+ g = −γ (0)
√λ + g = g,
for some constant λ > 0. Thus a =√
λ and b = g. Notice that if fx = 0 on S,
then ∫ L
0
( f 2x + f 2
y )dx
∣∣∣∣y=0
= 2
∫ L
0
∫ 0
−d
( fx fxy + fy fyy)dy dx
= 2
∫∫�
fy{ fyy − fxx}dy dx
≤∫∫�
[g
λf 2
y + λ
g( fyy − fxx)
2
]dy dx
=∫∫�
[g
λf 2
y + λ
g(� f )2 − 4λ
gfxx fyy
]dy dx
=∫∫
�
[g
λf 2
y + λ
g(� f )2 − 4λ
gf 2xy
]dy dx
≤∫∫�
[g
λ|∇ f |2 + λ
g(� f )2
]dy dx
provided fx = fy = 0 on the flat bed y = −d. Thus∫∫�
f 2y dx ≤
∫∫�
[g
λ|∇ f |2 + λ
g(� f )2
]dy dx
for all smooth functions f , periodic in x , with fx = 0 on y = 0 and f ≡ 0 in a
neighborhood of the flat bed B = {y = −d}. Thus, setting f = ψ2,
δ2H ≥∫∫�
|∇ψ2|2 dy dx + 1
θ
∫∫�
|�ψ2|2 dy dx
+ g
∫S
η22 dx − 2
√λ
∫S
∣∣∣∣∂ψ2
∂y
∣∣∣∣ |η2|dx
≥∫∫�
|∇ψ2|2dy dx + 1
θ
∫∫�
|�ψ2|2dy dx − λ
g
∫S
∣∣∣∣∂ψ2
∂y
∣∣∣∣2
dx
≥(
1
θ− λ2
g2
)∫∫�
|�ψ2|2 dy dx

922 A. CONSTANTIN AND W. A. STRAUSS
so that the condition
(3.7) supp∈[p0,0]
|γ ′(p)| = θ ≤ g2
λ2
ensures linear stability provided the velocity on S is perturbed only tangentially.
As for (iv), let us now assume that the perturbation ψ2 satisfies the inequality
(3.6). Then
2√
λ
∫S
∣∣∣∣∂ψ2
∂n
∣∣∣∣ |η2|dx ≤ g
∫S
η22 dx + λ
g
∫S
∣∣∣∣∂ψ2
∂n
∣∣∣∣2
dx
≤ g
∫S
η22 dx + λµ2
g
∫S
ψ22 dx .
But
ψ2(x, 0) =∫ 0
−d
∂ψ2
∂ydy, 0 ≤ x ≤ L ,
so ∫S
ψ22 dx =
∫ L
0
(∫ 0
−d
∂ψ2
∂ydy
)2
dx ≤ d
∫ L
0
∫ 0
−d
(∂ψ2
∂y
)2
dy dx
≤ d
∫∫�
|∇ψ2|2 dy dx .
Combining the previous two inequalities we get
δ2H ≥∫∫�
|∇ψ2|2 dy dx + g
∫S
η22 dx − 2
√λ
∫S
∂ψ2
∂yη2 dx
≥∫∫�
|∇ψ2|2 dy dx − λµ2
g
∫S
ψ22 dx
≥(
1 − dλµ2
g
) ∫∫�
|�ψ2|2 dy dx .
Since a =√
λ, we deduce that the condition
(3.8) aµ ≤√
g
d
ensures linear stability under perturbations satisfying (3.6).
Example 2. Theorem 3.3 applies to certain nontrivial flows as well. Indeed, it was
proven in [8] that there is a smooth curve of nontrivial wave solutions traveling at
speed c that bifurcate from the curve of trivial flows at a specific point λ∗ > 0. If
the inequalities in (3.7) and (3.8) were strict at λ = λ∗, then by a small alteration
of the previous inequalities we would infer the partial linear stability of nontrivial

STABILITY PROPERTIES OF STEADY WATER WAVES 923
waves of small-amplitude as stated in Theorem 3.3 (i)–(iv). Using this approach,
let us take as an example the vorticity function γ (ψ) = −ε ψ . Because of (3.7),
Theorem 3.3(iii) applies if we prove λ∗2 < g2/ε. We will show that this is the case
if
(3.9) 0 < ε ≤(
16g2
p40
)1/3
.
Indeed, from [8] we know that λ∗ < λ0, where λ0 > 0 is the unique solution of the
equation ∫ 0
p0
dp
(λ0 + 2(p))3/2= 1
g.
Thus it suffices to prove λ20 ≤ g2/ε. Now 2(p) = εp2, so the identity defining λ0
becomes1
λ0
−p0√λ0 + εp2
0
= 1
g
or g2 p20 = λ2
0(λ0 + εp20). But then g2 p2
0 ≥ 2 ε1/2|p0| λ5/2
0 so that
(λ∗)2 < λ20 ≤
(g2|p0|2√
ε
)4/5
≤ g2
ε
by (3.9).
4 Formal Stability of Some Bifurcating Solutions
In this section we will prove a formal stability property of small-amplitude,
symmetric, irrotational, steady periodic waves (periodic Stokes waves). A pertur-
bative argument will extend this stability result to flows with small vorticity. The
meaning of this formal stability property is that the linearized operator in stream
coordinates around the steady wave is nonnegative.
4.1 Another Functional and the Transformed Problem
We introduce another functional
L(ψ) =∫∫�
{1
2|∇(ψ − cy)|2 − g(y + d) + 1
2Q + (cy − ψ)
}dy dx,
where γ is any C1-function and ′(p) = γ (−p), (0) = 0. Since ψ will be
constant on the free surface S and on the flat bottom y = −d , it is natural to
introduce new independent variables
q = x, p = cy − ψ(x, y),

924 A. CONSTANTIN AND W. A. STRAUSS
x πy=−d−π
y
y= (x)η
p
q πp=p0
−π
p=0
q=x
p= − ψ
FIGURE 4.1. A coordinate transformation.
that have the effect of fixing the free surface (see Figure 4.1). The dependent
variables in (2.8) are replaced by the single function h(q, p) = y + d , periodic in
the q-variable, so that
hq = ψx
c − ψy
, hp = 1
c − ψy
.
The function h is the height above the flat bottom. (We can recover the free surface
as η(x) = h(q, 0) and the velocity as u = ψy, v = −ψx .) In these coordinates the
functional L takes the form
J (h) =∫∫
R
{1 + h2
q
2h2p
− gh + Q
2+ (p)
}hp dq dp
where R = (0, L) × (p0, 0) is a rectangle in R2. The domain of J is the set of
all h ∈ C2(R̄) that are L-periodic and even in q with h = 0 for p = p0 and with
hp �= 0 in R̄. Throughout this section the waves are assumed to be symmetric
with respect to the crest line. It was proven in [5] that if the vorticity function is
decreasing, any wave with a profile that is monotone between crests and troughs
has to be symmetric. For any γ each solution constructed in [8] has the same
property. In this section the vorticity function is any smooth function, later to be
assumed sufficiently small.
A straightforward calculation of the first variation of J gives
〈δJ (h), k〉 = −∫∫
R
G1(h)h−3p k dq dp − 1
2
∫T
G2(Q, h)h−2p k dq,
where
G1(h) = hqqh2p − 2hqhphpq + (1 + h2
q)hpp + γ (−p) h3p

STABILITY PROPERTIES OF STEADY WATER WAVES 925
and
G2(Q, h) =1 + h2
q
h2p
+ 2gh − Q.
Thus any critical point of J satisfies the equations G1(h) = 0 in R, G2(Q, h) = 0
on T . As we proved in [6], these equations are precisely the water-wave equations
transformed to the new coordinates.
The second variation, calculated at any critical point h with nonvanishing hp, is
〈δ2J (h)l, k〉 = −∫∫
R
G1h(h)l · kh−3p dq dp − 1
2
∫T
G2h(Q, h)l · kh−2p dq
where the subscript h denotes the Fréchet derivative. Thus δ2J (h) represents the
linearized operator (G1h,G2h) around the solution h. Clearly δ2J (h) provides a
symmetric bilinear form on the space X of all functions k ∈ H 1(R̄) that are L-
periodic and even in q with∫
Tk dq = 0 and k = 0 at p = p0. The integral
condition means we retain the same average free surface level. We define h to be
formally stable if 〈δ2J (h)k, k〉 ≥ 0 for all k ∈ X .
4.2 Trivial Solutions
The trivial solutions are those with a flat surface. Given the constants L and p0,
such solutions form a one-parameter family given by h(q, p) = H(p) with
(4.1) H(p) = H(p, λ) =∫ p
p0
ds√λ + 2(s)
, p0 ≤ p ≤ 0,
where the parameter λ > −2min equals the square of the fluid velocity at the
surface in the moving frame. Furthermore, the parameter Q is a function of λ
given by
Q = λ + 2g
∫ 0
p0
dp√λ + 2(p)
.
In [8] we proved that there exists a bifurcation at a certain value λ∗ provided that
p0 satisfies the inequality
(4.2)
∫ 0
p0
[4π2(p − p0)
2
L2(2(p) − 2min)
1/2 + (2(p) − 2min)3/2
]dp < gp2
0.
PROPOSITION 4.1 The trivial solutions H( · , λ) are formally stable if and only if
λ ≥ λ∗.
PROOF: Calculating along the trivial curve h = H(p) by expanding
k(q, p) =∞∑
n=0
kn(p) cos
(2πnq
L
),

926 A. CONSTANTIN AND W. A. STRAUSS
we find that
〈δ2J (H)k, k〉 = L
2
∞∑n=1
{ ∫ 0
p0
( [k ′n(p)]2
H 3p
+(
2πn
L
)2k2
n(p)
Hp
)dp − gk2
n(0)
}
+ L
{ ∫ 0
p0
[k ′0(p)]2
H 3p
dp − gk20(0)
}
since ∫ L
0
cos2
(2πnq
L
)dq =
{L/2 for n ≥ 1
L for n = 0.
Thus δ2J (H) is positive definite if and only if
gk2n(0) ≤
∫ 0
p0
{ [k ′n(p)]2
H 3p
+(
2πn
L
)2k2
n(p)
Hp
}dp for all n ≥ 0.
We know from [8] that
µ(λ) = infk
−gk2(0) + ∫ 0
p0H−3
p (k ′)2 dp∫ 0
p0H−1
p k2 dp
≥ −(
2π
L
)2
if and only if λ ≥ λ∗.
We deduce that
(4.3) 〈δ2J (H)k, k〉 ≥ 0 if and only if λ ≥ λ∗
since the condition∫
Tk dq = 0 is equivalent to k0(0) ≡ 0. �
Remark 4.2. If we permit∫
Tk dq �= 0, then the trivial solutions are formally stable
if and only if λ ≥ λ0, where λ0 > 0 is the unique solution of∫ 0
p0
(λ0 + 2(p))−3/2 dp = 1
g.
Indeed, in addition to λ ≥ λ∗, we need that
gk2(0) ≤∫ 0
p0
[k ′(p)]2
H 3p
dp for all k ∈ H 1(p0, 0) satisfying k(p0) = 0.
According to lemma 3.5 in [8], the above inequality holds if and only if λ ≥ λ0.
4.3 Nontrivial Solutions
Now we consider the local bifurcating curve of nontrivial solutions.
THEOREM 4.3 The nontrivial solutions that are sufficiently near the bifurcation
point are formally stable provided both the vorticity and the depth are sufficiently
small.

STABILITY PROPERTIES OF STEADY WATER WAVES 927
(λ , 0)
( λ (s) ,w(s))
( λ*, 0 )
FIGURE 4.2. The bifurcating solution curve.
To prove Theorem 4.3, we must study how the spectrum of the linearized op-
erator varies along the bifurcating curve near the bifurcation point (Figure 4.2).
Our basic tool is the exchange of stability theorem of Crandall and Rabinowitz [9],
which we now state. We denote by N (�) and R(�) the null space and range,
respectively, of any operator �.
DEFINITION 4.4 Let �, K : X → Y be two bounded linear operators from a
real Banach space X to another one Y . A complex number β is called a K -simple
eigenvalue of � if
dimN (� − βK ) = 1 = codimR(� − βK )
and
Kϕ∗ /∈ R(� − βK ) for 0 �= ϕ∗ ∈ N (� − βK).
THEOREM 4.5 (Crandall-Rabinowitz) Let X and Y be real Banach spaces and
let K : X → Y be a bounded linear operator. Let F : R × X → Y be C2 near
(λ∗, 0) ∈ R×X with F(λ, 0) = 0 for |λ∗−λ| small. Let � = −Fw(λ∗, 0). If β = 0
is a K -simple eigenvalue of � and a −Fλw(λ∗, 0)-simple eigenvalue of �, then
there exists locally a curve (λ(s), w(s)) ∈ R × X such that (λ(0), w(0)) = (λ∗, 0)
and F((λ(s), w(s)) = 0. Moreover, if F(λ,w) = 0 with w �= 0 and (λ,w)
near (λ∗, 0), then (λ,w) = (λ(s), w(s)) for some s �= 0. Furthermore, there are
eigenvalues β(s), βtriv(λ) ∈ R with eigenvectors ϕ(s), ϕtriv(λ) ∈ X such that
−Fw(λ(s), w(s))ϕ(s) = β(s)Kϕ(s),
−Fw(λ, 0)ϕtriv(λ) = βtriv(λ)Kϕtriv(λ),
with
β(0) = βtriv(λ∗) = 0 and ϕ(0) = ϕtriv(λ
∗) = ϕ∗.

928 A. CONSTANTIN AND W. A. STRAUSS
Each curve is C1 (respectively, C2) if F is C2 (respectively, C3), with
dβtriv
dλ
∣∣∣∣λ=λ∗
�= 0 and lims→0, β(s) �=0
sλ′(s)β(s)
= − 1
β ′triv(λ
∗).
PROOF OF THEOREM 4.3: We shall apply Theorem 4.5 with the spaces
X = {w ∈ C3+α(R̄) | w = 0 on B, w even and L-periodic in q,∫ 2π
0w(q, 0)dq = 0
},
Y = C1+αper (R̄) × C2+α
per (T ),
where T = {p = 0} is the top and B = {p = p0} is the bottom of the rectangle
R = (0, 2π) × (p0, 0). Furthermore, we define
F(λ,w) = G(Q(λ), H(λ) + w).
Thus the operator F : (−2min,∞)× X → Y is given explicitly by F = (F1,F2)
with
F1(λ,w) = (1 + w2q)(Hpp + wpp) − 2wq(Hp + wp)wpq
+ (Hp + wp)2wqq + γ (−p)(Hp + wp)
3(4.4)
and
(4.5) F2(λ,w) = 1 + w2q + (2g(H + w) − Q)(Hp + wp)
2.
Now we define
Kw = (w, 0) ∀w ∈ X and � = −Fw(λ∗, 0).
Notice that Fw = (F1w,F2w) with
F1w(λ, 0) = ∂2p + H 2
p ∂2q + 3γ (−p)H 2
p ∂p in R
and
F2w(λ, 0) = 2(λ−1g − λ1/2∂p)∣∣T,
whereas
(4.6) Fλw(λ, 0) = (−a−4∂2q − 3γ a−4∂p , (−2a−4g − a−1∂p)
∣∣T
)where
a(p) = {λ + 2(p)}1/2.
We proved in [8] the existence of some bifurcation value λ∗ > −2min such that
0 is a −Fλw(λ∗, 0)-simple eigenvalue of �. Moreover, we claim that 0 is a K -
simple eigenvalue of �. This means that Kφ∗ = (φ∗, 0) �∈ R(−Fw(λ∗, 0)). In
view of the characterization of R(�) given in [8, lemma 3.8], this is equivalent to
the statement that ∫∫R
[ϕ∗]2a3 dq dp > 0 for ϕ∗ �≡ 0,
which is obvious.

STABILITY PROPERTIES OF STEADY WATER WAVES 929
Defining the spectrum as
�(λ,w) = {β ∈ C | −Fw(λ,w) − βK is not invertible from X to Y },it is known [8, lemma 4.4] that �(λ,w) consists entirely of eigenvalues of finite
multiplicity with no finite accumulation point and there is a neighborhood N of
[0,∞) in C such that �(λ,w) ∩ N is a finite set. Along the trivial curve (w ≡ 0),
we have h(q, p) = H(p) and
−Fw(λ, 0) = −(a−3[∂p(a
3∂p) + ∂q(a∂q)], 2λ−1[g − λ3/2∂p])
is a self-adjoint operator in L2(R) with the weight function a−3. Therefore �(λ, 0)
is real, with the eigenvalues having ∞ as a limit point, and with its smallest eigen-
value simple. Hence for small w �= 0 the spectrum �(λ,w), which generally
consists of complex numbers, has a unique simple eigenvalue β(λ,w) with small-
est real part. Thus h is formally stable if and only if β(λ, h − H(λ)) ≥ 0. We know
by Proposition 4.1 that β(λ∗, 0) = 0 and β(λ, 0) > 0 if and only if λ > λ∗.
We now claim that along the curve (λ(s), w(s)) of nontrivial solutions near the
bifurcation point (λ∗, 0), with λ∗ = λ(0), linear stability (respectively, instability)
holds if λ′′(0) < 0 (respectively, λ′′(0) > 0). Since ∂β(λ∗, 0)/∂λ �= 0 according to
Theorem 4.5, we deduce that
(4.7)∂β(λ∗, 0)
∂λ> 0.
Below (see Lemma 4.6) we will prove that λ′(0) = 0 for all vorticity functions
γ . Assuming this, we write λ′(s) = s λ′′(0) + O(s2). In combination with Theo-
rem 4.5, this yields
(4.8) lims→0
β(λ(s), w(s))
s2= −∂β(λ∗, 0)
∂λ· λ′′(0).
Since β(λ∗, 0) = 0, from (4.7)–(4.8) we infer that β(λ(s), w(s)) > 0 for |s| small
if λ′′(0) < 0. But β(λ∗, 0) is the smallest eigenvalue of −Fw(λ∗, 0) by Proposi-
tion 4.1, so that β(λ(s), w(s)) is the smallest eigenvalue of −Fw(λ(s), w(s)) and
our claim follows. Theorem 4.3 thus follows once we establish the validity of
Lemma 4.6 below. �
LEMMA 4.6 For all vorticity functions γ we have λ′(0) = 0. If γ ≡ 0, given
L > 0 and p0 < 0, for d > 0 sufficiently small we have that λ′′(0) < 0, whereas
d ′′(0) > 0 if d > 0 is sufficiently large. This pattern persists if ω is sufficiently
close to 0 throughout the domain.
4.4 Proof of Lemma 4.6
To simplify the intricate calculations we will assume that L = 2π throughout
this proof. After showing that λ′(0) = 0 for all vorticity functions γ , we will pro-
ceed with the calculations of λ′′(0) in the particular case of the irrotational setting.

930 A. CONSTANTIN AND W. A. STRAUSS
The proof is complete once the result concerning the sign of λ′′(0) is established
in the irrotational case. Indeed, λ′′(0) is a continuous function of γ so that its sign
persists for uniformly small γ .
In fact, we will prove that, due to a symmetry of the problem, the bifurcation
must be of the pitchfork type. This observation was pointed out to us by M. Golu-
bitsky. It implies automatically that λ′(0) = 0 but not the more difficult assertion
concerning the sign of λ′′(0), for which we must go through all the details anyway.
See Remark 4.8 at the end of this section.
Explicitly writing (4.4)–(4.5), we get
(1 + w2q)(Hpp + wpp) − 2wq(Hp + wp)wpq
+ (Hp + wp)2wqq + γ (−p)(Hp + wp)
3 = 0 in R,(4.9)
1 + w2q + (2g(H + w) − Q)(Hp + wp)
2 = 0 on T .(4.10)
Step 1. Taking partial derivatives with respect to s and denoting ′ = ∂s , we
obtain
2wqw′q(Hpp + wpp) + (1 + w2
q)(H ′pp + w′
pp)
− 2w′q(Hp + wp)wpq − 2wq(H ′
p + w′p)wpq
− 2wq(Hp + wp)w′pq + 2(Hp + wp)(H ′
p + w′p)wqq
+ (Hp + wp)2w′
qq + 3(Hp + wp)2γ (−p)(H ′
p + w′p) = 0 in R,
(4.11)
2wqw′q + (2g(H ′ + w′) − Q′)(Hp + wp)
2
+ 2(2g(H + w) − Q)(Hp + wp)(H ′p + w′
p) = 0 on T .(4.12)
Evaluating (4.11)–(4.12) at s = 0 yields
H ′pp + w′
pp + H 2p w′
qq + 3 γ (−p) H 2p (H ′
p + w′p) = 0 in R,(4.13)
(2g(H ′ + w′) − Q′)H 2p + 2(2gH − Q)Hp(H ′
p + w′p) = 0 on T,(4.14)
since w(0) ≡ 0. The previous two relations can be simplified considerably. Indeed,
since
Hpp = −γ (−p) H 3p in R,
we have
H ′pp = −3γ (−p)H 2
p H ′p in R,
so that (4.13) becomes
(4.15) w′pp + H 2
p w′qq + 3γ (−p)H 2
p w′p = 0 in R (at s = 0).
On the other hand, the Bernoulli condition
(2gH − Q)H 2p + 1 = 0 on T

STABILITY PROPERTIES OF STEADY WATER WAVES 931
yields
(2gH ′ − Q′)H 2p + 2Hp H ′
p(2gH − Q) = 0 on T,
so (4.14) becomes
(4.16) gH 2p w′ + (2gH − Q)Hpw
′p = 0 on T .
In combination with Bernoulli’s condition and the fact that Hp = λ−1/2 on T , the
previous relation leads to
(4.17) gw′ = λ3/2w′p on T (at s = 0).
We can summarize (4.15)–(4.17) as
(4.18) Fw(λ(0), w′(0)) = (0, 0).
This last relation is not accidental as the local bifurcation approach pursued in [8]
ensures that lims→0 w′(s, q, p) = M(p) cos q with
(4.19) M(p0) = 0, M(p) > 0, for p ∈ (p0, 0],satisfying
(4.20)
{Mpp − H 2
p M = 0 in (p0, 0)
M(p0) = 0, gM(0) = λ3/2 Mp(0).
Step 2. Differentiating (4.11)–(4.12) with respect to s, we get
2(w′q)
2(Hpp + wpp) + 2wqw′′q(Hpp + wpp) + 4wqw
′q(H ′
pp + w′pp)
+ (1 + w2q)(H ′′
pp + w′′pp) − 2w′′
q(Hp + wp)wpq − 4w′q(H ′
p + w′p)wpq
− 4w′q(Hp + wp)w
′pq − 2wq(H ′′
p + w′′p)wpq − 4wq(H ′
p + w′p)w
′pq
− 2wq(H ′p + w′
p)w′pq − 2wq(Hp + wp)w
′′pq + 2(H ′
p + w′p)
2wqq
+ 2(Hp + wp)(H ′′p + w′′
p)wqq + 4(Hp + wp)(H ′p + w′
p)w′qq
+ (Hp + wp)2w′′
qq + 6(Hp + wp)(H ′p + w′
p)2γ (−p)
+ 3γ (−p)(Hp + wp)2(H ′′
p + w′′p) = 0 in R,
(4.21)
whereas on the top
2wqw′′q + 2(w′
q)2 + (2g(H ′′ + w′′) − Q′′)(Hp + wp)
2
+ 4(2g(H ′ + w′) − Q′)(Hp + wp)(H ′p + w′
p)
+ 2(2g(H + w) − Q)(H ′p + w′
p)2
+ 2(2g(H + w) − Q)(Hp + wp)(H ′′p + w′′
p) = 0 on T .
(4.22)
Evaluation of the previous two equations at s = 0 leads to the equations for w′′(0),
2(w′q)
2 Hpp + (H ′′pp + w′′
pp) − 4w′q Hpw
′pq
+ 4Hp(H ′p + w′
p)w′qq + H 2
p w′′qq + 6Hp(H ′
p + w′p)
2γ (−p)
+ 3γ (−p)H 2p (H ′′
p + w′′p) = 0 in R,
(4.23)

932 A. CONSTANTIN AND W. A. STRAUSS
2(w′q)
2 + H 2p (2g(H ′′ + w′′) − Q′′)
+ 4(2g(H ′ + w′) − Q′)Hp(H ′p + w′
p) + 2(2gH − Q)(H ′p + w′
p)2
+ 2(2gH − Q)Hp (H ′′p + w′′
p) = 0 on T .
(4.24)
Differentiating the equation Hpp = −γ (−p) H 3p twice with respect to the pa-
rameter s, we get
(4.25)
{H ′
pp = −3γ (−p)H ′p H 2
p
H ′′pp = −3 γ (−p) H 2
p H ′′p − 6γ (−p) Hp(H ′
p)2 in R,
and (4.23) becomes
2(w′q)
2 Hpp + w′′pp − 4w′
q Hpw′pq + 4Hp(H ′
p + w′p)w
+ H 2p w′′
qq + 12Hp H ′pw
′pγ (−p) + 6γ (−p) Hp(w
′p)
2
+ 3γ (−p)H 2p w′′
p = 0 in R (at s = 0).
(4.26)
On the other hand, differentiating the Bernoulli condition (2gH − Q)H 2p + 1 = 0
on T twice yields
(2gH ′′ − Q′′)H 2p + 4(2gH ′ − Q′)Hp H ′
p + 2(H ′p)
2(2gH − Q)
+ 2Hp H ′′P(2gH − Q) = 0 on T,
and (4.24) becomes
2(w′q)
2 + 2gH 2p w′′ + 8gw′ Hpw
′p + 8gw′ Hp H ′
p
+ 4(2gH ′ − Q′)Hpw′p + 2(2gH − Q) (w′
p)2
+ 2(2gH − Q)Hpw′′p = 0 on T (at s = 0).
(4.27)
Multiplying (4.26) by H−3p w′ in order to bring the expression into a self-adjoint
form and integrating over R, we obtain
2
∫∫R
(w′q)
2 Hpp H−3p w′ dq dp +
∫∫R
w′′ppw
′ H−3p dq dp(4.28)
− 4
∫∫R
H−2p w′
qw′pqw
′ dq dp + 4
∫∫R
H−2p H ′
pw′qqw
′ dq dp
+ 4
∫∫R
H−2p w′
pw′qqw
′ dq dp +∫∫
R
H−1p w′′
qqw′ dq dp +

STABILITY PROPERTIES OF STEADY WATER WAVES 933
+ 12
∫∫R
γ (−p) H−2p H ′
pw′pw
′ dq dp
+ 6
∫∫R
γ (−p)H−2p (w′
p)2w′ dq dp
+ 3
∫∫R
γ (−p) H−1p w′′
pw′ dq dp = 0 at s = 0.
Multiplying relation (4.15) by H−3p w′′, we get
(H−3p w′
p)pw′′ + (H−1
p w′q)q = 0 in R (at s = 0),
which, due to its self-adjoint form, yields by integration∫∫R
(H−3
p w′′ppw
′ + 3H−1p γ (−p)w′′
pw′ + H−1
p w′′qqw
′)dq dp
+∫T
(H−3
p w′pw
′′ − H−3p w′w′′
p
)dq = 0 at s = 0.
In view of the previous equation, (4.28) becomes
2
∫∫R
(w′q)
2 Hpp H−3p w′ dq dp − 4
∫∫R
H−2p w′
qw′pqw
′ dq dp
+ 4
∫∫R
H−2p H ′
pw′qqw
′ dq dp + 4
∫∫R
H−2p w′
pw′qqw
′ dq dp
+ 12
∫∫R
γ (−p)H−2p H ′
pw′pw
′ dq dp
+ 6
∫∫R
γ (−p)H−2p (w′
p)2w′ dq dp
−∫T
H−3p (w′
pw′′ − w′w′′
p)dq = 0 at s = 0.
(4.29)
Since
(4.30) Hp = (λ + 2(p))−1/2
implies
(4.31) Hpp = −γ (−p)H 3p , H ′
p = −λ′
2H 3
p ,

934 A. CONSTANTIN AND W. A. STRAUSS
with w′ = M(p) cos(q), we find that (4.29) becomes
2πλ′∫ 0
p0
Hp M2 dp − 6πλ′∫ 0
p0
γ (−p)Hp M Mp dp
−∫T
H−3p (w′
pw′′ − w′w′′
p)dq = 0 at s = 0(4.32)
in view of (4.30) and
(4.33)
{∫ 2π
0sin2 q cos q dq = ∫ 2π
0sin q cos2 q dq = ∫ 2π
0cos3 q dq = 0∫ 2π
0cos2 q dq = π.
On the other hand, multiplying (4.20) by H 2p M , an integration on [p0, 0] yields
3
∫ 0
p0
γ (−p) Hp M Mp dp
=∫ 0
p0
Hp M2 dp −∫ 0
p0
H−1p M Mpp dp
=∫ 0
p0
Hp M2 dp − H−1p (0)M(0)Mp(0) +
∫ 0
p0
γ (−p)Hp M Mp dp
if we integrate by parts and take into account (4.30). Using this in (4.32), we obtain∫T
H−3p (w′
pw′′ − w′w′′
p)dq
= πλ′(
3H−1p (0)M(0)Mp(0) −
∫ 0
p0
Hp M2 dp
)at s = 0.
(4.34)
Differentiating the Bernoulli condition
(4.35) 2gH − Q + 1
H 2p
= 0 on T
with respect to s and taking into account (4.30), we get
(4.36) 2gH ′ − Q′ =2H ′
p
H 3p
= −λ′.
With w′(0) = M(p) cos(q) in (4.28), we therefore obtain
2M2 sin2(q) + 2gH 2p w′′ + 8gHp M Mp cos2(q)
− 4gλ′(0)H 4p M cos(q) − 4λ′(0)Hp Mp cos(q) − 2H−2
p M2p cos2(q)
− 2H−1p w′′
p = 0 on T (at s = 0).

STABILITY PROPERTIES OF STEADY WATER WAVES 935
Multiplying the previous relation by 12w′(0) H−2
p (0) and integrating over a period,
we get
g
∫T
w′w′′ dq − 2πgλ′ H 2p M2 − 2πλ′ H−1
p M Mp −∫T
H−3p w′′
pw′ dq = 0
at s = p = 0. In combination with (4.20), this yields
∫T
H−3p (w′
pw′′ − w′′
pw′) dq
= 2gπλ′M2 H 2p + 2πλ′ H−1
p M Mp at s = p = 0.
(4.37)
From (4.34) and the previous relation we infer that
λ′(0)
(∫ 0
p0
Hp M2 dp + 2gM2(0)H 2p (0) − H−1
p (0)M(0)Mp(0)
)= 0.
But H−1p (0)M(0)Mp(0) = gM2(0)H 2
p (0) by (4.20) so that
λ′(0)
(∫ 0
p0
Hp M2 dp + gM2(0)H 2p (0)
)= 0.
This yields
(4.38) λ′(0) = 0.
Step 3(a). Now differentiating (4.21) with respect to s, we get
6(w′q)
2(H ′pp + w′
pp) + 6w′qw
′′q(Hpp + wpp) + 6wqw
′q(H ′′
pp + w′′pp)
+ 6wqw′′q(H ′
pp + w′pp) + 2wqw
′′′q (Hpp + wpp) + (1 + w2
q)(H ′′′pp + w′′′
pp)
− 2w′′′q wpq(Hp + wp) − 4w′′
qw′pq(Hp + wp) − 6w′′
qwpq(H ′p + w′
p)
− 12w′qw
′pq(H ′
p + w′p) − 6w′
qwpq(H ′′p + w′′
p) − 6w′qw
′′pq(Hp + wp)
− 6wqw′pq(H ′′
p + w′′p) − 2wqwpq(H ′′′
p + w′′′p ) − 6wqw
′′pq(H ′
p + w′p)
− 2wqw′′′pq(Hp + wp) + 6(H ′
p + w′p)(H ′′
p + w′′p)wqq + 6(H ′
p + w′p)
2w′qq
+ 2(Hp + wp)(H ′′′p + w′′′
p )wqq + 6(Hp + wp)(H ′′p + w′′
p)w′qq
+ 2(Hp + wp)(H ′p + w′
p)w′′qq + (Hp + wp)
2w′′′qq + 6γ (−p)(H ′
p + w′p)
3
+ 18γ (−p)(Hp + wp)(H ′p + w′
p)(H ′′p + w′′
p)
+ 3γ (−p)(Hp + wp)2(H ′′′
p + w′′′p ) = 0 in R.

936 A. CONSTANTIN AND W. A. STRAUSS
Since w ≡ 0 at s = 0, we infer that
6(w′q)
2(H ′pp + w′
pp) + 6w′qw
′′q Hpp + H ′′′
pp + w′′′pp − 6w′′
qw′pq Hp
− 12w′qw
′pq(H ′
p + w′p) − 6w′
qw′′pq Hp + 6w′
qq(H ′p + w′
p)2
+ 6Hp(H ′′p + w′′
p)w′qq + 6Hp(H ′
p + w′p)w
′′qq + H 2
p w′′′qq
+ 6γ (−p)(H ′p + w′
p)3 + 18γ (−p)Hp(H ′
p + w′p)(H ′′
p + w′′p)
+ 3γ (−p)H 2p (H ′′′
p + w′′′p ) = 0 in R at s = 0.
We also have the partial differential equation for H in R, which after three differ-
entiations with respect to s yields at s = 0 precisely the previous relation without
terms involving w′, w′′, or w′′′. This observation leads to the following simplifica-
tion of the previous equation:
6(w′q)
2(H ′pp + w′
pp) + 6w′qw
′′q Hpp + w′′′
pp − 6w′′qw
′pq Hp
− 12w′qw
′pq(H ′
p + w′p) − 6w′
qw′′pq Hp + 6w′
qq(H ′p + w′
p)2
+ 6Hp(H ′′p + w′′
p)w′qq + 6Hp(H ′
p + w′p)w
′′qq + H 2
p w′′′qq
+ 18γ (−p)(H ′p)
2w′p + 18γ (−p)H ′
p(w′p)
2 + 18γ (−p)Hp H ′pw
′′p
+ 6γ (−p)(w′p)
3 + 18γ (−p)Hp H ′′p w′
p + 18γ (−p)Hpw′pw
′′p
+ 3γ (−p)H 2p w′′′
p = 0 in R at s = 0.
This is the equation satisfied by w′′. Multiplying it by H−3p w′ and taking into
account the fact that
H ′p = H ′
pp = 0 at s = 0,
in view of (4.31), (4.38), and (4.25), we obtain by integrating over R that
6
∫∫R
H−3p Hppw
′qw
′′qw
′ dq dp + 6
∫∫R
H−3p (w′
q)2w′
ppw′ dq dp
+∫∫
R
w′′′pp H−3
p w′ dq dp − 6
∫∫R
H−2p w′′
qw′pqw
′ dq dp
− 12
∫∫R
H−3p w′
qw′pqw
′pw
′ dq dp − 6
∫∫R
H−2p w′
qw′′pqw
′ dq dp
+ 6
∫∫R
H−3p w′
qq(w′p)
2w′ dq dp + 6
∫∫R
H−2p H ′′
p w′qqw
′ dq dp
+ 6
∫∫R
H−2p w′
qqw′′pw
′ dq dp + 6
∫∫R
H−2p w′′
qqw′pw
′ dq dp
+∫∫
R
H−1p w′′′
qqw′ dq dp + 6
∫∫R
γ (−p)H−3p (w′
p)3w′ dq dp +

STABILITY PROPERTIES OF STEADY WATER WAVES 937
+ 18
∫∫R
γ (−p)H−2p H ′′
p w′pw
′ dq dp
+ 18
∫∫R
γ (−p)H−2p w′
pw′′pw
′ dq dp
+ 3
∫∫R
γ (−p)H−1p w′′′
p w′ dq dp = 0 at s = 0.
On the other hand, writing (4.15) in the self-adjoint form
(H−3p w′
p)p + (H−1p w′
q)q = 0
and multiplying by w′′′, after integration over R, we get∫∫R
(H−3p w′′′
ppw′ + 3γ (−p)H−1
p w′′′p w′ + H−1
p w′′′qqw
′)dq dp
−∫T
(H−3p w′
pw′′′ − H−3
p w′w′′′p )dq = 0 at s = 0.
Combining the previous two relations, we deduce that
(4.39)
6
∫∫R
H−3p Hppw
′qw
′′qw
′ dq dp + 6
∫∫R
H−3p (w′
q)2w′
ppw′ dq dp
− 6
∫∫R
H−2p w′′
qw′pqw
′ dq dp − 12
∫∫R
H−3p w′
qw′pqw
′pw
′ dq dp
− 6
∫∫R
H−2p w′
qw′′pqw
′ dq dp + 6
∫∫R
H−3p w′
qq(w′p)
2w′ dq dp
+ 6
∫∫R
H−2p H ′′
p w′qqw
′ dq dp + 6
∫∫R
H−2p w′
qqw′′pw
′ dq dp
+ 6
∫∫R
H−2p w′′
qqw′pw
′ dq dp + 6
∫∫R
γ (−p)H−3p (w′
p)3w′ dq dp
+ 18
∫∫R
γ (−p)H−2p H ′′
p w′pw
′ dq dp
+ 18
∫∫R
γ (−p)H−2p w′
pw′′pw
′ dq dp
−∫T
(H−3
p w′pw
′′′ − H−3p w′w′′′
p
)dq = 0 at s = 0.

938 A. CONSTANTIN AND W. A. STRAUSS
Step 3(b). On the other hand, differentiating (4.22) with respect to s, we get
on the top T
2w′qw
′′q + 2wqw
′′′q + 4w′
qw′′q + (2g(H ′′′ + w′′′) − Q′′′)(Hp + wp)
2
+ 6(2g(H ′′ + w′′) − Q′′)(Hp + wp)(H ′p + w′
p)
+ 6(2g(H ′ + w′) − Q′)(Hp + wp)(H ′′p + w′′
p)
+ 6(2g(H ′ + w′) − Q′)(H ′p + w′
p)2
+ 6(2g(H + w) − Q)(H ′p + w′
p)(H ′′p + w′′
p)
+ 2(2g(H + w) − Q)(Hp + wp)(H ′′′p + w′′′
p ) = 0.
In the previous relation, all terms involving no w′, w′′, or w′′′ can be eliminated
since we can differentiate three times with respect to s along the trivial bifurcation
branch of flat surfaces. Evaluating the outcome at s = 0 and taking into account
the fact that w(0) ≡ 0 in R, as well as the fact that
2gH ′ − Q′ = H ′p = 0 at s = 0
in view of (4.36), we obtain
6w′qw
′′q + 2gw′′′ H 2
p + 6(2gH ′′ − Q′′)Hpw′p
+ 12gHpw′′w′
p + 12gw′(w′p)
2 + 12gw′ Hp H ′′p + 12gw′ Hpw
′′p
+ 6(2gH − Q)H ′′p w′
p + 6(2gH − Q)w′pw
′′p
+ 2(2gH − Q)Hpw′′′p = 0 on T (at s = 0).
Notice that (4.16) multiplied by H ′′p H−1
p (respectively, by w′′p H−1
p ) yields
(2gH − Q)w′p H ′′
p + gw′ Hp H ′′p = (2gH − Q)w′
pw′′p + gw′ Hpw
′′p = 0 on T
at s = 0, which, used in the preceding relation, leads to
3w′qw
′′q + gw′′′ H 2
p + 3(2gH ′′ − Q′′)Hpw′p + 6gHpw
′′w′p + 6gw′(w′
p)2
+ 3gw′ Hp H ′′p + 3gw′ Hpw
′′p + (2gH − Q)Hpw
′′′p = 0 on T (at s = 0),
after division by a factor of 2. Taking into account (4.35) and the relations
(4.40) H ′′p = −λ′′
2H 3
p , 2gH ′′ − Q′′ = −λ′′ on T at s = 0,
which are direct consequences of (4.36)–(4.38), we deduce that
3w′qw
′′q + gw′′′ H 2
p − 3λ′′ Hpw′p + 6gHpw
′′w′p + 6gw′(w′
p)2
− 3g
2λ′′w′ H 4
p + 3gw′ Hpw′′p − H−1
p w′′′p = 0 on T at s = 0.

STABILITY PROPERTIES OF STEADY WATER WAVES 939
Multiply this by H−2p w′ to get
gw′′′w′ − H−3p w′′′
p w′
= − 3H−2p w′w′
qw′′q + 3λ′′ H−1
p w′w′p − 6gH−1
p w′w′′w′p
− 6gH−2p (w′)2(w′
p)2 + 3g
2λ′′(w′)2 H 2
p − 3gH−1p (w′)2w′′
p on T
at s = 0. Since
gw′′′w′ = H−3p w′
pw′′′ on T (at s = 0),
in view of (4.17), integration of the above yields∫T
H−3p (w′
pw′′′ − w′′′
p w′) dq = −3
∫T
H−2p w′w′
qw′′q dq
+ 3λ′′∫T
H−1p w′w′
p dq − 6g
∫T
H−1p w′w′′w′
p dq
− 6g
∫T
H−2p (w′)2(w′
p)2 dq + 3g
2λ′′
∫T
(w′)2 H 2p dq
− 3g
∫T
H−1p (w′)2w′′
p dq at s = 0.
(4.41)
Combining (4.39) with (4.41) and also using (4.31) and (4.40), we deduce that
− 6
∫∫R
γ (−p)w′qw
′′qw
′ dq dp + 6
∫∫R
H−3p (w′
q)2w′
ppw′ dq dp(4.42)
− 6
∫∫R
H−2p w′′
qw′pqw
′ dq dp − 12
∫∫R
H−3p w′
qw′pqw
′pw
′ dq dp
− 6
∫∫R
H−2p w′
qw′′pqw
′ dq dp + 6
∫∫R
H−3p w′
qq(w′p)
2w′ dq dp
− 3λ′′∫∫
R
Hpw′qqw
′ dq dp + 6
∫∫R
H−2p w′
qqw′′pw
′ dq dp
+ 6
∫∫R
H−2p w′′
qqw′pw
′ dq dp + 6
∫∫R
γ (−p)H−3p (w′
p)3w′ dq dp
+ 18
∫∫R
γ (−p)H−2p H ′′
p w′pw
′ dq dp
+ 18
∫∫R
γ (−p)H−2p w′
pw′′pw
′ dq dp +

940 A. CONSTANTIN AND W. A. STRAUSS
+ 3
∫T
H−2p w′w′
qw′′q dq − 3λ′′
∫T
H−1p w′w′
p dq
+ 6g
∫T
H−1p w′w′′w′
p dq + 6g
∫T
H−2p (w′)2(w′
p)2 dq
− 3g
2λ′′
∫T
(w′)2 H 2p dq + 3g
∫T
H−1p (w′)2w′′
p dq = 0 at s = 0.
Step 4. At this point we leave the general setting and concentrate on the
irrotational case, in which case we can write w′′ explicitly. For γ ≡ 0 we have
Hp = λ−1/2 throughout R, and (4.42) becomes
6λ3/2
∫∫R
(w′q)
2w′ppw
′ dq dp − 6λ
∫∫R
w′′qw
′pqw
′ dq dp
− 12λ3/2
∫∫R
w′qw
′pqw
′pw
′ dq dp − 6λ
∫∫R
w′qw
′′pqw
′ dq dp
+ 6λ3/2
∫∫R
w′qq(w
′p)
2w′ dq dp − 3λ−1/2λ′′∫∫
R
w′qqw
′ dq dp
+ 6λ
∫∫R
w′qqw
′′pw
′ dq dp + 6λ
∫∫R
w′′qqw
′pw
′ dq dp
+ 3λ
∫T
w′w′qw
′′q dq − 3λ1/2λ′′
∫T
w′w′p dq
+ 6gλ1/2
∫T
w′w′′w′p dq + 6gλ
∫T
(w′)2(w′p)
2 dq
− 3g
2λλ′′
∫T
(w′)2 dq + 3gλ1/2
∫T
(w′)2w′′p dq = 0 at s = 0.
(4.43)
Since w(0) = M(p) cos(q) and Hp = λ−1/2 in R, we deduce that at s = 0,
(4.44)
w′′pp + λ−1w′′
qq − 4λ−1/2 M Mp = 0 in R
w′′ = 0 on p = p0
gw′′ − λ3/2w′′p = −λM2 sin2 q − 3λ1/2gM Mp cos2 q on p = 0.
Indeed, the partial differential equation in (4.44) follows at once. The first bound-
ary condition is a consequence of differentiating twice with respect to s the equa-
tion w = 0, valid on p = p0. Since (4.35)–(4.36) transform (4.27) into
2M2 sinq +2gλ−1w′′ + 8gλ−1/2 M Mp cos2 q − 2λ−1 M2p cosq −2λ1/2w′′
p = 0

STABILITY PROPERTIES OF STEADY WATER WAVES 941
on T at s = 0, while (4.20) ensures that gM = λ3/2 Mp on T , the previous equation
multiplied by λ/2 is precisely the second boundary condition of (4.44). Because
each w(s) is an even function of q (cf. [8]), we have a Fourier expansion
(4.45) w′′(p) =∑n≥0
wn(p) cos(nq), p ∈ [p0, 0], q ∈ [0, 2π].
Since sin2 q = (1 − cos(2q))/2 and cos2 q = (1 + cos(2q))/2, we can rewrite the
second boundary condition in (4.44) as
gw′′ − λ3/2w′′p = −λ
2M2 − 3
2λ1/2gM Mp +
(λ
2M2 − 3
2λ1/2gM Mp
)cos(2q).
By (4.45) we thus infer that
(4.46)
∂2pw0 = 4λ−1/2 M Mp in (p0, 0)
w0 = 0 on p = p0
gw0 − λ3/2∂pw0 = −λ2
M2 − 32λ1/2gM Mp on p = 0,
whereas
(4.47)
∂2pwn − λ−1n2wn = 0 in (p0, 0)
wn = 0 on p = p0
gwn − λ3/2∂pwn = 0 on p = 0
for n ≥ 1, n �= 2,
and
(4.48)
∂2pw2 − 4λ−1w2 = 0 in (p0, 0)
w2 = 0 on p = p0
gw2 − λ3/2∂pw2 = λ2
M2 − 32λ1/2gM Mp on p = 0.
By (4.47) we infer at once that
(4.49) wn ≡ 0 for n ≥ 1, n �= 2.
Recall [8] that
(4.50) M(p) = sinh
(p − p0√
λ
), p ∈ [p0, 0],
where λ = λ(0) > 0 is the unique solution of the equation
(4.51) λ = g tanh
( |p0|√λ
).
Using (4.50), we compute
4λ−1/2 M Mp = 2λ−1 sinh
(2(p − p0)√
λ
).

942 A. CONSTANTIN AND W. A. STRAUSS
Therefore, the general solution w0 of the inhomogeneous differential equation in
(4.46) with w0(p0) = 0 is
(4.52) w0(p) = 1
2sinh
(2(p − p0)√
λ
)+ A(p − p0)
with A ∈ R. We determine A from the Robin boundary condition in (4.46) as
(4.53) A = λ
2
1 + 2 cosh2(
p−p0√λ
)gp0 + λ3/2
< 0.
The sign of A is due to the fact that λ = λ(0) < (g|p0|)3/2; cf. [8]. On the other
hand, the general solution w2 of the differential equation in (4.48) with w2(p0) = 0
is
(4.54) w2(p) = B sinh
(2(p − p0)√
λ
).
We determine B from the Robin boundary condition in (4.48) by taking into ac-
count (4.50)–(4.51) as
(4.55) B =2 cosh
(p−p0√
λ
)+ 1
4 sinh2(
p−p0√λ
) > 0.
From (4.45), (4.49), (4.52), and (4.54), we deduce that
(4.56) w′′ = 1
2sinh
(2(p − p0)√
λ
)+ A(p − p0) + B sinh
(2(p − p0)√
λ
)cos(2q)
with A and B given by (4.53) and (4.55), respectively.
Step 5. Knowing the explicit formula for w′′, since w′ = M(p) cos(q) with
M specified at (4.50), we can analyze (4.43) carefully to determine the sign of
λ′′(0). The coefficient of λ′′ in (4.43) is
−3λ−1/2
∫∫R
w′qqw
′ dq dp − 3λ1/2
∫T
w′pw
′ dq − 3g
2λ−1
∫T
(w′)2 dq.
Taking into account (4.33) and (4.50), this expression is precisely 3π times
λ−1/2
∫ 0
p0
sinh2
(p − p0√
λ
)dp − sinh
(−p0√λ
)cosh
(−p0√λ
)− g
2λsinh2
(−p0√λ
)
= p0
2√
λ− 1
2sinh
(−p0√λ
)cosh
(−p0√λ
)− g
2λsinh2
(−p0√λ
).
Recalling (4.51), the coefficient of λ′′ in (4.43) is found to be
(4.57) 3π
{p0
2√
λ− sinh
(−p0√λ
)cosh
(−p0√λ
)}< 0
as p0 < 0.

STABILITY PROPERTIES OF STEADY WATER WAVES 943
The terms in (4.43) not involving w′′ or λ′′ are
6λ3/2
∫∫R
M3 Mpp cos2(q) sin2(q)dq dp
− 12λ3/2
∫∫R
M2 M2p cos2(q) sin2(q)dq dp
− 6λ3/2
∫∫R
M2 M2p cos4(q)dq dp + 6gλ
∫T
M2 M2p cos4(q)dq.
Since
(4.58)
∫ 2π
0
sin2(q) cos2(q)dq = π
4,
∫ 2π
0
cos4(q)dq = 3π
4,
the above expression becomes
3π
4
{2λ1/2
∫ 0
p0
sinh4
(p − p0√
λ
)dp − 10λ1/2
∫ 0
p0
sinh2
(2(p − p0)√
λ
)dp
+ 3g sinh2
(−2p0√λ
)}.
Computing
∫ 0
p0
sinh2
(p − p0√
λ
)dp = p0
2+ 1
2λ1/2 sinh
(−p0√λ
)cosh
(−p0√λ
),
∫ 0
p0
sinh2
(2(p − p0)√
λ
)dp = p0
2+ λ1/2 sinh
(−p0√λ
)cosh3
(−p0√λ
)
− 1
2λ1/2 sinh
(−p0√λ
)cosh
(−p0√λ
),
∫ 0
p0
sinh4
(p − p0√
λ
)dp = −3p0
8+ 1
4λ
12 sinh
(−p0√λ
)cosh3
(−p0√λ
)
− 5
8λ1/2 sinh
(−p0√λ
)cosh
(−p0√λ
),
(4.59)
we infer that the contribution to (4.43) of the terms not involving w′′ or λ′′ is
(4.60)3π
2
{−λ1/2 p0 + 6g sinh2
(−p0√λ
)cosh2
(−p0√λ
)}
if we also take into account (4.51).

944 A. CONSTANTIN AND W. A. STRAUSS
On the other hand, the double integral terms in (4.43) involving w′′ are
6λ
∫∫R
w′′q M Mp sin(q) cos(q)dq dp + 6λ
∫∫R
w′′pq M2 sin(q) cos(q)dq dp
− 6λ
∫∫R
w′′p M2 cos2(q)dq dp + 6λ
∫∫R
w′′qq M Mp cos2(q)dq dp.
Using (4.56) we transform this into
6λ
∫∫R
{−8λ−1/2 B
[sinh2
(p − p0√
λ
)+ cosh2
(p − p0√
λ
)]M2 sin2(q) cos2(q)
− λ−1/2
[sinh2
(p − p0√
λ
)+ cosh2
(p − p0√
λ
)]M2 cos2(q) − AM2 cos2(q)
− 2λ−1/2 B
[sinh2
(p − p0√
λ
)+ cosh2
(p − p0√
λ
)]M2 cos2(q)[cos2(q) − sin2(q)]
− 8λ−1/2 B sinh
(p − p0√
λ
)cosh
(p − p0√
λ
)M Mp cos4(q)
}dq dp.
Taking into account (4.33), (4.50), and (4.58), the above expression becomes
− 6πλ
∫ 0
p0
{A sinh2
(p − p0√
λ
)+ λ−1/2(1 + 9B) sinh2
(p − p0√
λ
)cosh2
(p − p0√
λ
)
+ λ−1/2(1 + 3B) sinh4
(p − p0√
λ
)}dq dp.
We compute this using (4.59) as
3πλ
2
{(λ−1/2 − 2A) p0
+ (12B + 3 − 2λ1/2 A) sinh
(−p0√λ
)cosh
(−p0√λ
)
− 2(6B + 1) sinh
(−p0√λ
)cosh3
(−p0√λ
)}.
(4.61)
Finally, the terms in (4.43) unaccounted for are boundary terms involving w′′,namely,
− 3λ
∫T
w′′q M2 sin(q) cos(q)dq + 6gλ1/2
∫T
w′′M Mp cos2(q)dq
+ 3gλ1/2
∫T
w′′p M2 cos2(q)dq.

STABILITY PROPERTIES OF STEADY WATER WAVES 945
Using (4.50)–(4.51), (4.33), and (4.58), the above expression becomes
π
{6λB sinh3
(−p0√λ
)cosh
(−p0√λ
)
+ 9g sinh2
(−p0√λ
)cosh2
(−p0√λ
)
+ 9gB sinh2
(−p0√λ
)cosh2
(−p0√λ
)
− 6g Ap0 sinh
(−p0√λ
)cosh
(−p0√λ
)
+ 3g Aλ1/2 sinh2
(−p0√λ
)+ 3g sinh4
(−p0√λ
)+ 3gB sinh4
(−p0√λ
)}.
(4.62)
Re-expressing (4.43) by taking into account the forms (4.57), (4.60), (4.61), and
(4.62) of its component parts, we obtain
3πλ′′(0)
{1
2p0λ
−1/2 − sinh
(−p0√λ
)cosh
(−p0√λ
)}
− 3πp0λA
(1 + 2 cosh2
(−p0√λ
))+ 9πgB sinh2
(−p0√λ
)
+ 9πg
2sinh2
(−p0√λ
)+ 9πg sinh2
(−p0√λ
)cosh2
(−p0√λ
)= 0
in view of (4.51). By means of (4.55) and dividing by 3π , we transform the previ-
ous relation into
λ′′(0)
{1
2p0λ
−1/2 − sinh
(−p0√λ
)cosh
(−p0√λ
)}
+ g
4
{1 + 2 cosh2
(−p0√λ
)}{3 + 6 sinh2
(−p0√λ
)− 4p0λA
g
}= 0.
(4.63)
On the other hand, (4.53) yields
(4.64) 2p0λA = λ2 p0
gp0 + λ3/2
(1 + 2 cosh2
(−p0√λ
)).
It is convenient to observe that [8]
(4.65) d = −p0√λ
.
Using (4.51) and (4.65), we compute
λ2 p0
gp0 + λ3/2=
λλ3/2 −p0√λ
−gp0 − λ3/2=
λ3/2gd sinh(d)
cosh(d)
g−p0√
λλ1/2 − λ3/2
=λ3/2gd sinh(d)
cosh(d)
cosh(d)
sinh(d)λ3/2d − λ3/2
=gd sinh(d)
cosh(d)
d cosh(d)
sinh(d)− 1
= gd sinh2(d)
d cosh2(d) − sinh(d) cosh(d).

946 A. CONSTANTIN AND W. A. STRAUSS
The previous equality in combination with (4.63) and (4.64) leads to the equation
λ′′(0)
{1
2p0λ
−1/2 − sinh(d) cosh(d)
}+ g
4(1 + 2 cosh2(d))
·{
3 + 6 sinh2(d) − 2d sinh2(d)(1 + 2 cosh2(d))
d cosh2(d) − sinh(d) cosh(d)
}= 0
(4.66)
if we recall (4.65). Since
2d sinh2(d)(1 + 2 cosh2(d))
d cosh2(d) − sinh(d) cosh(d)= 2d sinh2(d)(1 + 2 cosh2(d))
(d cosh(d) − sinh(d)) cosh(d)
= 2d(d + d3
6+ · · · )2
(1 + 2(1 + d2
2+ · · · )2
)(d(1 + d2
2+ · · · ) − (d + d3
6+ · · · ))(1 + d2
2+ · · · )
≈ 6d3
(d + d3
2) − (d + d3
6)
= 18 for d ↓ 0,
whereas
2d sinh2(d)(1 + 2 cosh2(d))
d cosh2(d) − sinh(d) cosh(d)= 2 sinh2(d)
d(2 + 1
cosh2(d)
)d − sinh(d)
cosh(d)
≈ 4 sinh2(d) for d → ∞,
we deduce from the fact that the coefficient of λ′′(0) in (4.66) is always negative,
in accordance with (4.57), that
(4.67) λ′′(0) < 0 for d small enough,
whereas
(4.68) λ′′(0) > 0 for d large enough.
In other words, small-amplitude irrotational waves are stable in the long-wave
regime and unstable in the short-wave regime.
4.5 Further Remarks
Remark 4.7 (Large-Amplitude Solutions). As one moves along the curve of non-
trivial solutions away from the bifurcation point (λ∗, 0), the spectrum changes con-
tinuously. The solutions remain linearly stable/unstable until the lowest eigenvalue
β(s) becomes 0. Say β(s0) = 0 with s0 > 0. At that point 0 ∈ �(λ(s0), w(s0)).
That is, Fw(λ(s0), w(s0)) has a null space. At that point various scenarios might
occur. For instance, a secondary bifurcation or a multiple bifurcation might occur,
we could encounter a turning point, or the continuum might cease to be a curve and
become a considerably more complicated pattern (Figure 4.3). Beyond the point
(λ(s0), w(s0)), the question of stability can be answered only with an independent
analysis.

STABILITY PROPERTIES OF STEADY WATER WAVES 947
λλ∗
trivial curve
turning point
simple bifurcation
multiple
bifurcation
FIGURE 4.3. Continuation along the bifurcation curve (for simplicity,
the symmetry properties of the continuum are ignored).
Remark 4.8 (Symmetry). By recognizing the presence of symmetries in our bifur-
cation problem, some of the calculations needed in the proof of Lemma 4.6 are
considerably simplified, as is generally the case when a group of symmetries is
acting [11]. Let us exemplify this by presenting a more general and elegant proof
of the relation λ′(0) = 0. The fact that h(q, p) is even and 2π-periodic in the
q-variable suggests the symmetry G : h(q, p) �→ h(q + π, p) with G2 being
the identity operator. A direct computation confirms that if F(λ,w) = 0, then
F(λ, Gw) = 0 and that the operator Fww(λ, 0) commutes with G. Moreover,
w(−s) = Gw(s) and Gw′(s) = −w′(−s) for |s| small. This is consistent with a
pitchfork bifurcation (Figure 4.4).
Starting from F(λ(s), w(s)) = 0 and differentiating gives
(4.69) λ′(s)Fλ + Fww′(s) = 0.
Evaluation of (4.69) at s = 0 yields the eigenvalue equation Fw(λ∗, 0) w′(0) = 0
since Fλ(λ∗, 0) = 0. Differentiating (4.69) with respect to s, we obtain
λ′′Fλ + [λ′]2Fλλ + 2λ′Fλww′ + Fww[w′]2 + Fww′′ = 0,
which, evaluated at s = 0, yields
(4.70) 2λ′(0)Fλw(λ∗, 0)w′(0) + Fww(λ∗, 0)[w′(0)]2 + Fw(λ∗, 0)w′′(0) = 0

948 A. CONSTANTIN AND W. A. STRAUSS
w
λ
w(s)
w(−s) = Gw(s)
FIGURE 4.4. A pitchfork bifurcation.
since Fλ(λ∗, 0) = Fλλ(λ
∗, 0) = 0. Applying the symmetry G to the equation
(4.70), we notice that w′ �→ −w′ while w′′ �→ w′′ so that (4.70) implies
(4.71) −2λ′(0)Fλw(λ∗, 0)w′(0) + Fww(λ∗, 0)[w′(0)]2 + Fw(λ∗, 0)w′′(0) = 0.
By (4.70)–(4.71) we get λ′(0)Fλw(λ∗, 0)w′(0) = 0. Since Fλw(λ∗, 0)w′(0) �= 0,
zero being a Fλw(λ∗, 0)-simple eigenvalue as mentioned above, we deduce that
λ′(0) = 0. This is the result of step 2 above.
Concerning the calculations involved subsequently in the proof of Lemma 4.6
towards the determination of the sign of λ′′(0), while the presence of the symmetry
is definitely useful, it appears that most of the intricate calculations performed
above are still necessary. Nevertheless, some further information can be obtained.
Indeed, differentiating (4.69) a second time with respect to s, we obtain
λ′′′Fλ + 3λ′λ′′Fλλ + (λ′)3Fλλλ + 3λ′′Fλww′ + 3(λ′)2Fλλww′
+ 2λ′Fλww(w′)2 + 2λ′Fλww′′ + λ′Fwwλ(w′)2 + Fwww(w′)3
+ 2Fwww′w′′ + λ′Fwλw′′ + Fwww′w′′ + Fww′′′ = 0.
We put s = 0 and use λ′(0) = 0 and Fλ(λ∗, 0) = Fλλ(λ
∗, 0) = Fλλλ(λ∗, 0) = 0 to
get
(4.72) 3λ′′Fλww′ + 3Fwww′w′′ + Fwww(w′)3 + Fww′′′ = 0 at s = 0.
Taking the weighted inner product 〈〈 · , · 〉〉 of (4.71) with w′ and with weight a3 in
R and weight 12a2 on T , we obtain
(4.73) κ1λ′′(0) + κ2 = 0.

STABILITY PROPERTIES OF STEADY WATER WAVES 949
The coefficient of λ′′(0) is
κ1 = 3〈〈Fλww′, w′〉〉
= −3
{ ∫∫R
a−1w′qqw
′ dq dp + 3
∫∫R
a−1γw′pw
′ dq dp
+ g
∫T
a−2(w′)2 dq + 1
2
∫T
aw′pw
′ dq
}
if we take into account the explicit formula for Fλw given by (4.6). This expression
is precisely 3� if we use the notation from [8, pp. 501–502]. There we proved that
� < 0. Thus κ1 < 0. Now the last term of κ2 is 〈〈Fww′′′, w′〉〉 = 〈〈w′′′,Fww′〉〉 = 0
as in lemma 3.8 of [8]. Therefore
κ2 = 3〈〈Fwww′w′′, w′〉〉 + 〈〈Fww(w′)3, w′〉〉 at s = 0.
Thus to infer the statement of Theorem 4.3 one only needs to know the sign of κ2.
It appears, however, that at this point the explicit calculations made earlier in the
case of irrotational flow cannot be avoided.
Acknowledgment. We thank M. Golubitsky for explaining to us the signifi-
cance of the symmetry. We are also indebted to J. Shatah for stimulating conver-
sations. This research was supported in part by Science Foundation Ireland Grant
04/BR/M0042 and by National Science Foundation Grant DMS-0405066.
Bibliography
[1] Arnold, V. I. Conditions for nonlinear stability of stationary plane curvilinear flows of an ideal
fluid. Dokl. Akad. Nauk 162 (1965), 975–978.
[2] Benjamin, T. J.; Feir, J. E. Disintegration of wave trains on deep water. J. Fluid. Mech. 27
(1967), 417–437.
[3] Bridges, T. J.; Mielke, A. A proof of the Benjamin-Feir instability. Arch. Rational Mech. Anal.
133 (1995), no. 2, 145–198.
[4] Buffoni, B. Existence and conditional energetic stability of capillary-gravity solitary water
waves by minimisation. Arch. Ration. Mech. Anal. 173 (2004), no. 1, 25–68.
[5] Constantin, A.; Escher, J. Symmetry of steady periodic surface water waves with vorticity.
J. Fluid Mech. 498 (2004), 171–181.
[6] Constantin, A.; Sattinger, D.; Strauss, W. Variational formulations for steady water waves with
vorticity. J. Fluid Mech. 548 (2006), 151–163.
[7] Constantin, A.; Strauss, W. Exact periodic traveling water waves with vorticity. C. R. Math.
Acad. Sci. Paris 335 (2002), no. 10, 797–800.
[8] Constantin, A.; Strauss, W. Exact steady periodic water waves with vorticity. Comm. Pure Appl.
Math. 57 (2004), no. 4, 481–527.
[9] Crandall, M. G.; Rabinowitz, P. H. Bifurcation, perturbation of simple eigenvalues and lin-
earized stability. Arch. Rational Mech. Anal. 52 (1973), 161–180.

950 A. CONSTANTIN AND W. A. STRAUSS
[10] Fraenkel, L. E. An introduction to maximum principles and symmetry in elliptic problems. Cam-
bridge Tracts in Mathematics, 128. Cambridge University Press, Cambridge, 2000.
[11] Golubitsky, M.; Schaeffer, D. G. Singularities and groups in bifurcation theory. Springer, New
York, 1985.
[12] Johnson, R. S. A modern introduction to the mathematical theory of water waves. Cambridge
Texts in Applied Mathematics. Cambridge University Press, Cambridge, 1997.
[13] Johnson, R. S. Camassa-Holm, Korteweg–de Vries and related models for water waves. J. Fluid
Mech. 455 (2002), 63–82.
[14] Lenells, J. Stability for the periodic Camassa-Holm equation. Math. Scand. 97 (2005), no. 2,
188–200.
[15] Lighthill, J. Waves in fluids. Cambridge University Press, Cambridge-New York, 1978.
[16] MacKay, R. S.; Saffman, P. G. Stability of water waves. Proc. Roy. Soc. London Ser. A 406
(1986), no. 1830, 115–125.
[17] McKean, H. P. Stability for the Korteweg–de Vries equation. Comm. Pure Appl. Math. 30
(1977), no. 3, 347–353.
[18] Mielke, A. On the energetic stability of solitary water waves. Recent developments in the math-
ematical theory of water waves (Oberwolfach, 2001). R. Soc. Lond. Philos. Trans. Ser. A Math.
Phys. Eng. Sci. 360 (2002), no. 1799, 2337–2358.
[19] Zakharov, V. Stability of periodic waves of finite amplitude on the surface of a deep fluid.
J. Appl. Mech. Tech. Phys. 9 (1968), 190–194.
ADRIAN CONSTANTIN WALTER A. STRAUSS
Department of Mathematics Brown University
Trinity College Dublin Department of Mathematics
Dublin 2 Box 1917
IRELAND Providence, RI 02912
E-mail: adrian@ E-mail: wstrauss@
maths.tcd.ie math.brown.edu
Received July 2005.