
Spherical Embedding and Classification
18
Spherical Embedding and Classification Richard C. Wilson Edwin R. Hancock Dept. of Computer Science University of York
Transcript of Spherical Embedding and Classification
Spherical Embedding and Classification
Richard C. Wilson
Edwin R. Hancock
Dept. of Computer Science
University of York
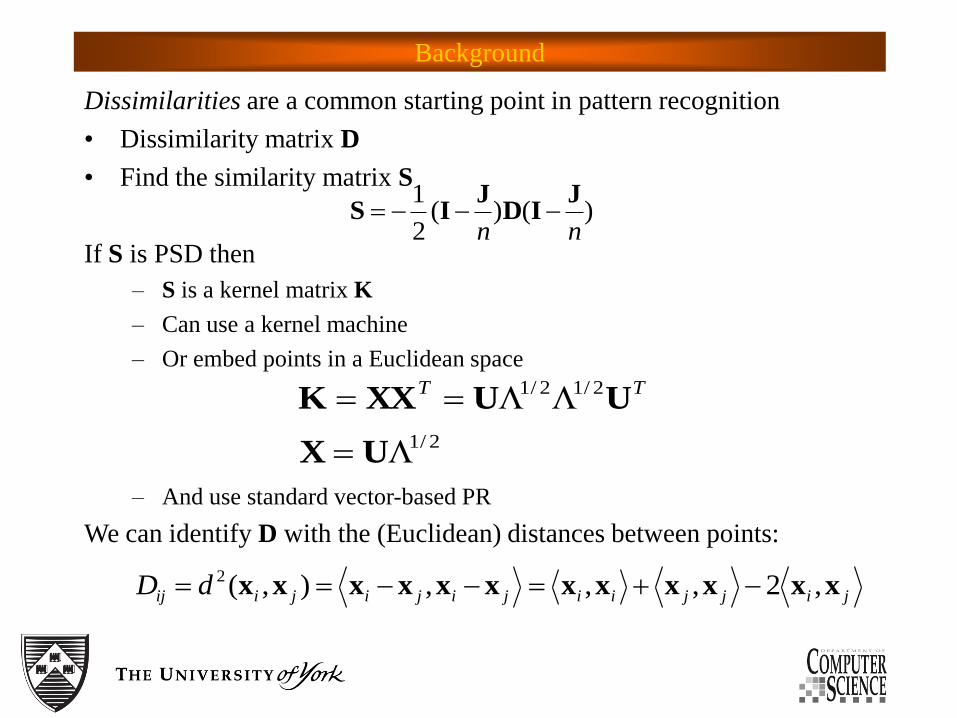
Background
Dissimilarities are a common starting point in pattern recognition
• Dissimilarity matrix D
• Find the similarity matrix S
If S is PSD then
– S is a kernel matrix K
– Can use a kernel machine
– Or embed points in a Euclidean space
– And use standard vector-based PR
We can identify D with the (Euclidean) distances between points:
2/1
2/12/1
UX
UUXXKTT
jijjiijijijiij dD xxxxxxxxxxxx ,2,,,),(2
)()(2
1
nn
JID
JIS
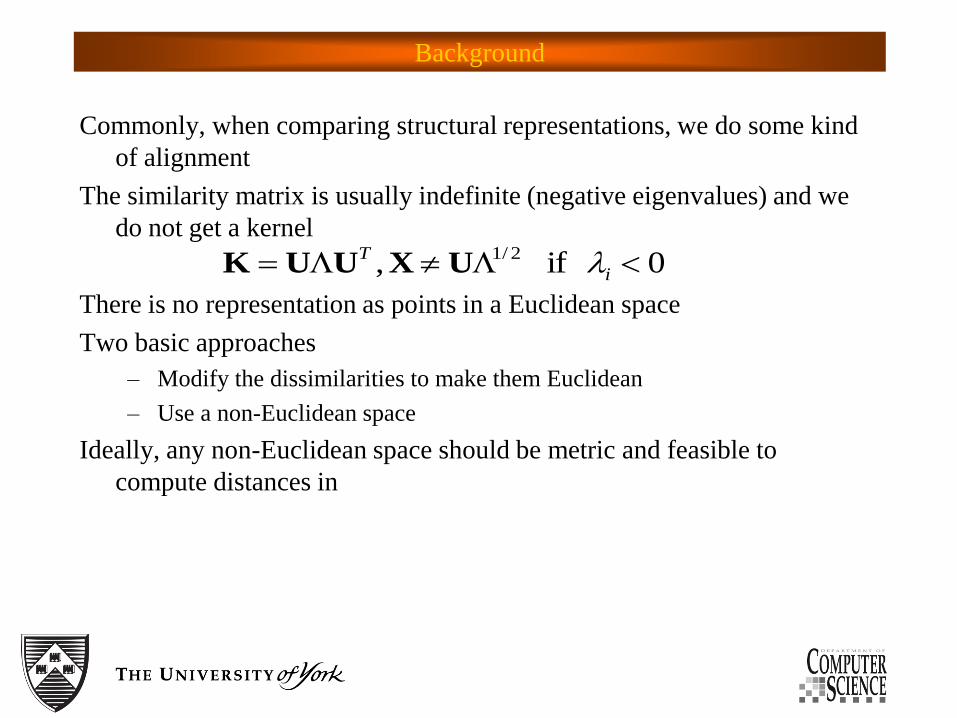
Background
Commonly, when comparing structural representations, we do some kind
of alignment
The similarity matrix is usually indefinite (negative eigenvalues) and we
do not get a kernel
There is no representation as points in a Euclidean space
Two basic approaches
– Modify the dissimilarities to make them Euclidean
– Use a non-Euclidean space
Ideally, any non-Euclidean space should be metric and feasible to
compute distances in
0 if , 2/1 i
T UXUUK
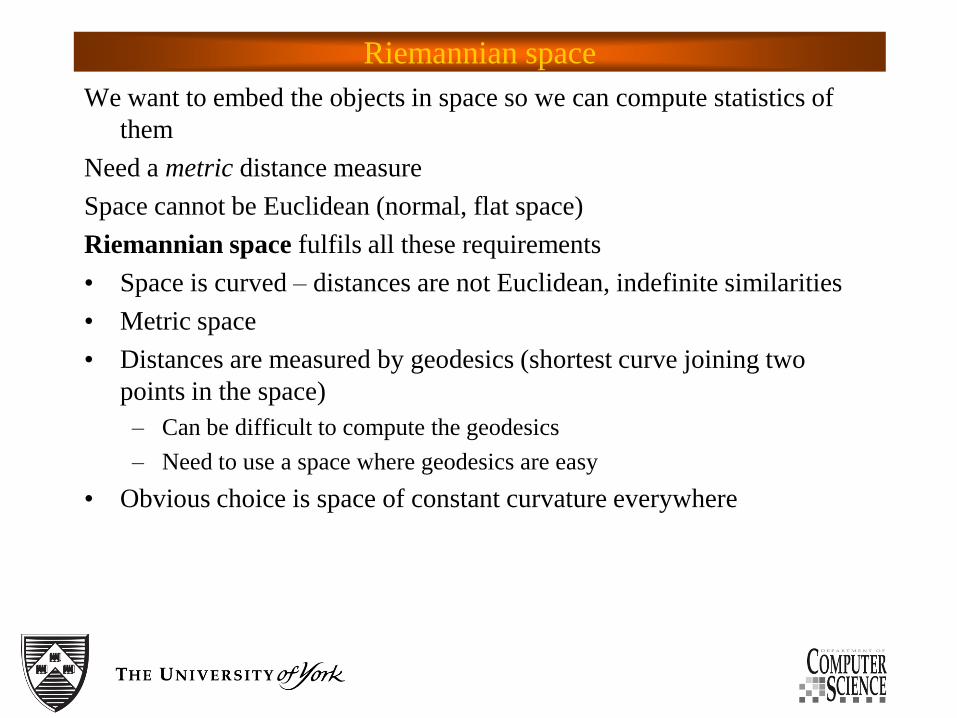
Riemannian space
We want to embed the objects in space so we can compute statistics of
them
Need a metric distance measure
Space cannot be Euclidean (normal, flat space)
Riemannian space fulfils all these requirements
• Space is curved – distances are not Euclidean, indefinite similarities
• Metric space
• Distances are measured by geodesics (shortest curve joining two
points in the space)
– Can be difficult to compute the geodesics
– Need to use a space where geodesics are easy
• Obvious choice is space of constant curvature everywhere
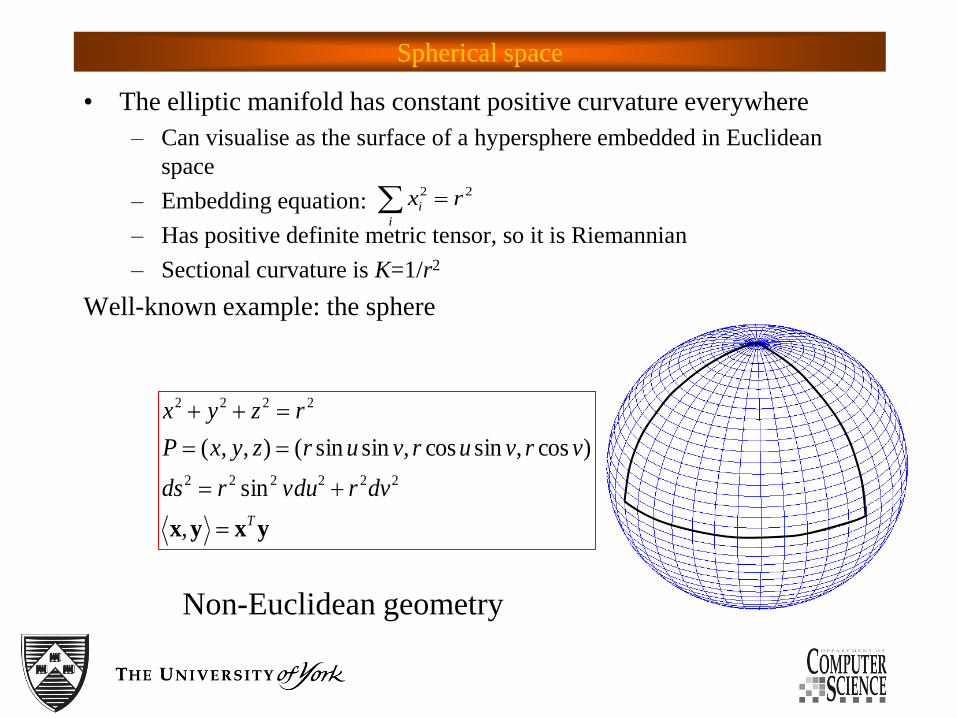
Spherical space
• The elliptic manifold has constant positive curvature everywhere
– Can visualise as the surface of a hypersphere embedded in Euclidean
space
– Embedding equation:
– Has positive definite metric tensor, so it is Riemannian
– Sectional curvature is K=1/r2
Well-known example: the sphere
22 rxi
i
yxyxT
dvrvdurds
vrvurvurzyxP
rzyx
,
sin
)cos,sincos,sinsin(),,(
222222
2222
Non-Euclidean geometry
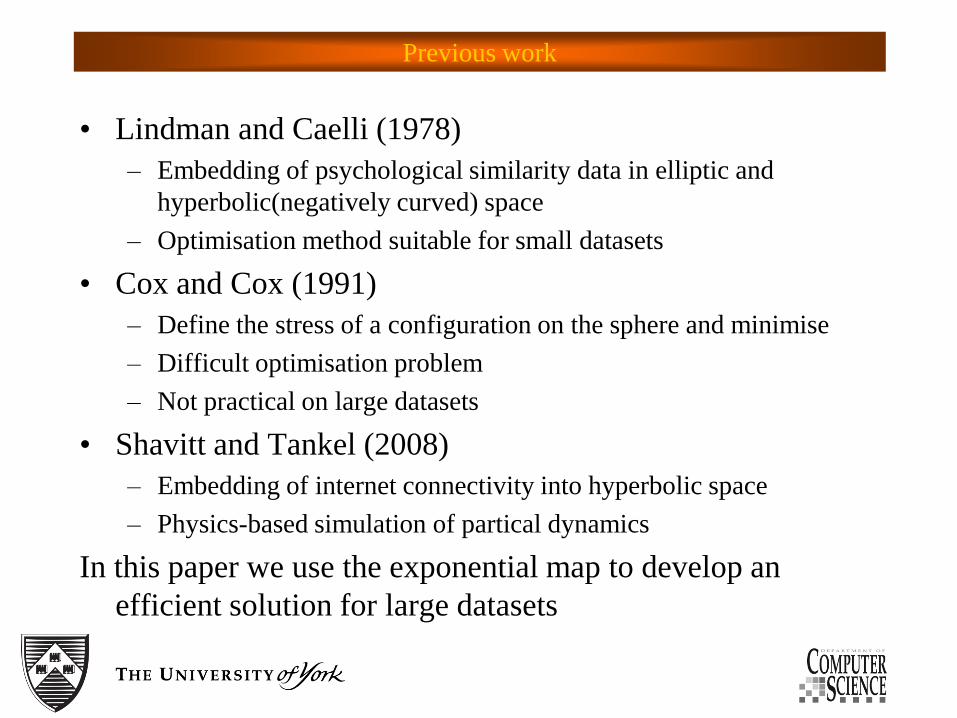
Previous work
• Lindman and Caelli (1978)
– Embedding of psychological similarity data in elliptic and
hyperbolic(negatively curved) space
– Optimisation method suitable for small datasets
• Cox and Cox (1991)
– Define the stress of a configuration on the sphere and minimise
– Difficult optimisation problem
– Not practical on large datasets
• Shavitt and Tankel (2008)
– Embedding of internet connectivity into hyperbolic space
– Physics-based simulation of partical dynamics
In this paper we use the exponential map to develop an
efficient solution for large datasets
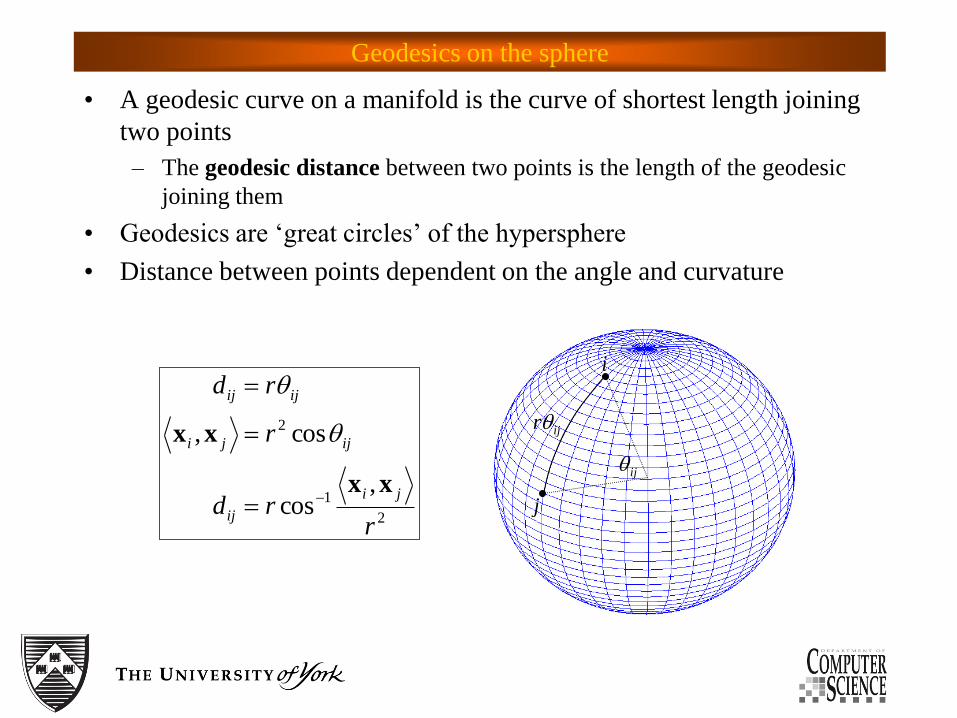
Geodesics on the sphere
• A geodesic curve on a manifold is the curve of shortest length joining
two points
– The geodesic distance between two points is the length of the geodesic
joining them
• Geodesics are „great circles‟ of the hypersphere
• Distance between points dependent on the angle and curvature
2
1
2
,cos
cos,
rrd
r
rd
ji
ij
ijji
ijij
xx
xx
ijr
ij
i
j
Elliptic space embedding
Problem:
Find points on the surface of a hypersphere such that the
geodesic distances are given by D
Non-linear constrained optimisation problem
Computationally expensive for large datasets
Our strategy is to update each point position separately
2
1
22*2
,
,cos where
||
min
rrd
r
dd
ji
ij
i
ijijr
xx
x
X
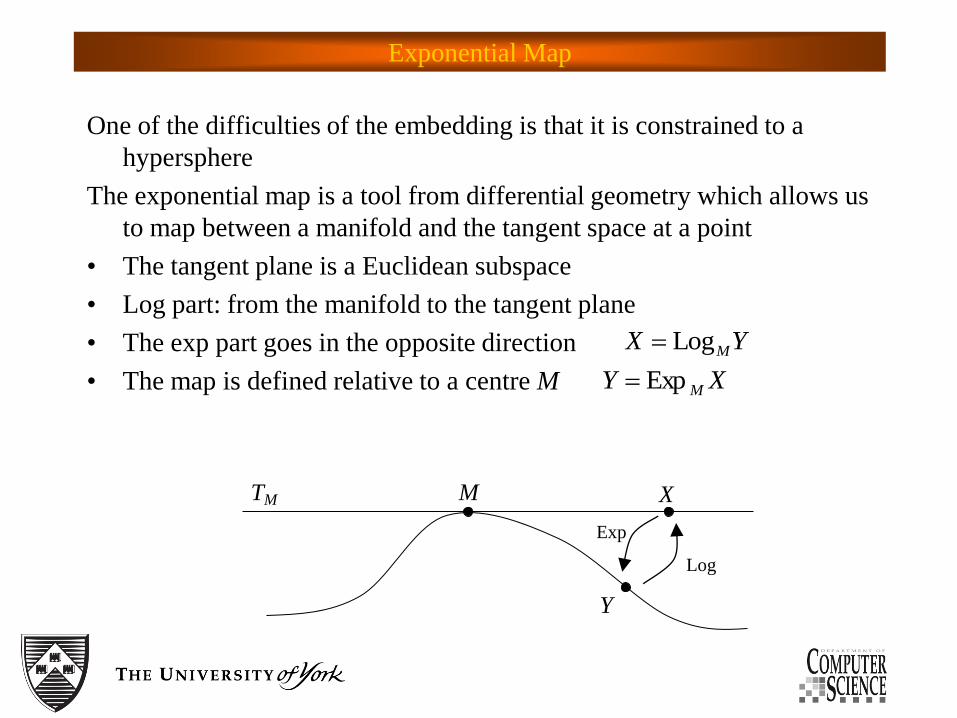
Exponential Map
One of the difficulties of the embedding is that it is constrained to a
hypersphere
The exponential map is a tool from differential geometry which allows us
to map between a manifold and the tangent space at a point
• The tangent plane is a Euclidean subspace
• Log part: from the manifold to the tangent plane
• The exp part goes in the opposite direction
• The map is defined relative to a centre M
YX MLog
XY MExp
M X
Y
Log
Exp
TM
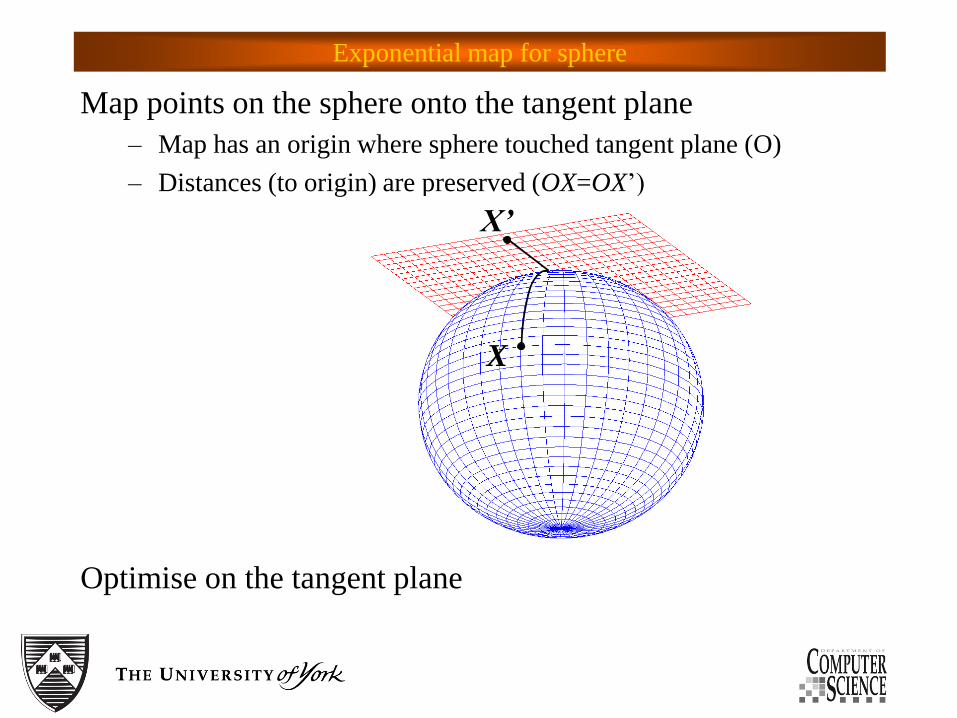
Exponential map for sphere
Map points on the sphere onto the tangent plane
– Map has an origin where sphere touched tangent plane (O)
– Distances (to origin) are preserved (OX=OX‟)
Optimise on the tangent plane
X
X’
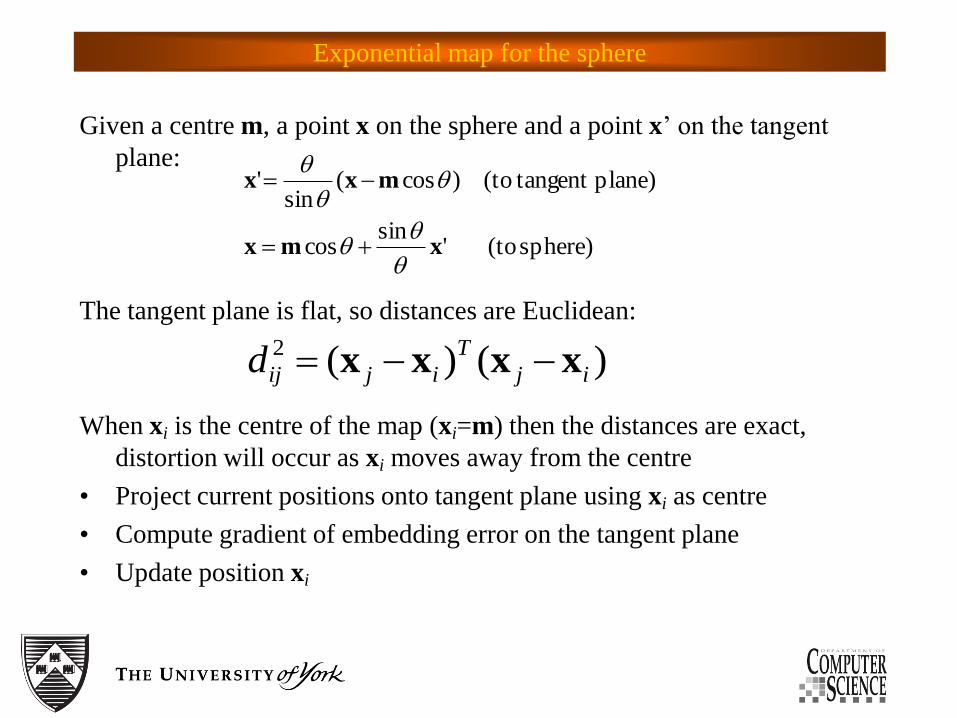
Exponential map for the sphere
Given a centre m, a point x on the sphere and a point x‟ on the tangent
plane:
The tangent plane is flat, so distances are Euclidean:
When xi is the centre of the map (xi=m) then the distances are exact,
distortion will occur as xi moves away from the centre
• Project current positions onto tangent plane using xi as centre
• Compute gradient of embedding error on the tangent plane
• Update position xi
sphere) (to 'sin
cos
plane) tangent (to )cos(sin
'
xmx
mxx
)()(2
ij
T
ijijd xxxx
Updating procedure
i
k
i
k
i
j
jiijiji
ji
ijij
E
ddE
ddE
)()1(
2*2
,
22*2
4
xx
xx
For large datasets, computation of second derivatives is
expensive, so we use a simple gradient descent
Can however choose an optimal step size as the smallest root
of the cubic:
)( ,with
023
2*2
222232
ji
T
jijijj
j
jj
j j
jj
j
j
Edd
EEEn
xx
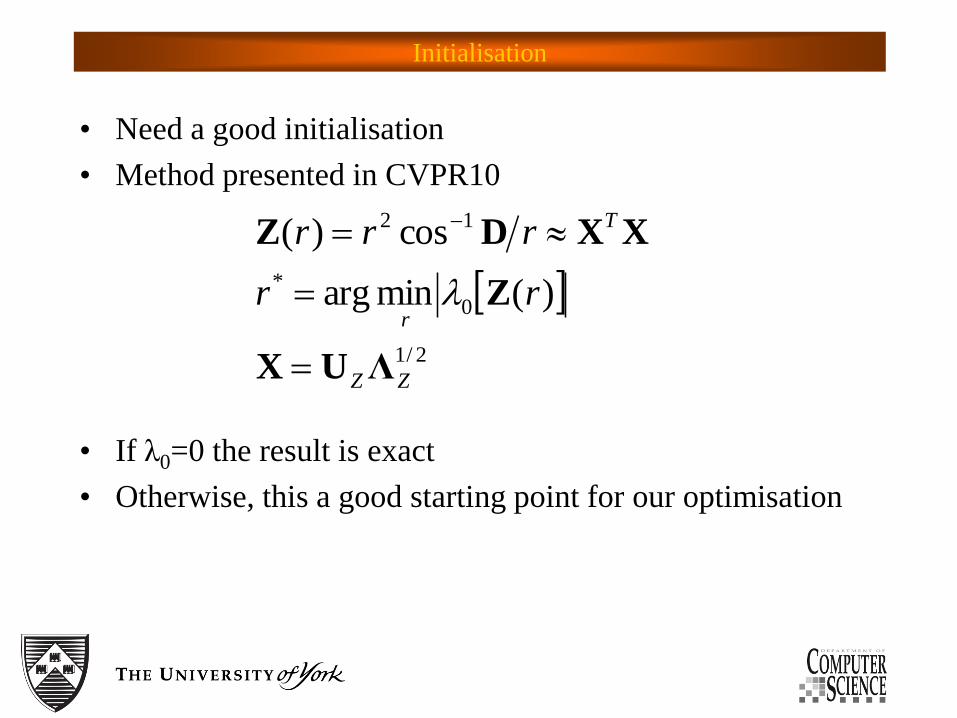
Initialisation
• Need a good initialisation
• Method presented in CVPR10
• If λ0=0 the result is exact
• Otherwise, this a good starting point for our optimisation
2/1
0
*
12
)(minarg
cos)(
ZZ
r
T
rr
rrr
ΛUX
Z
XXDZ
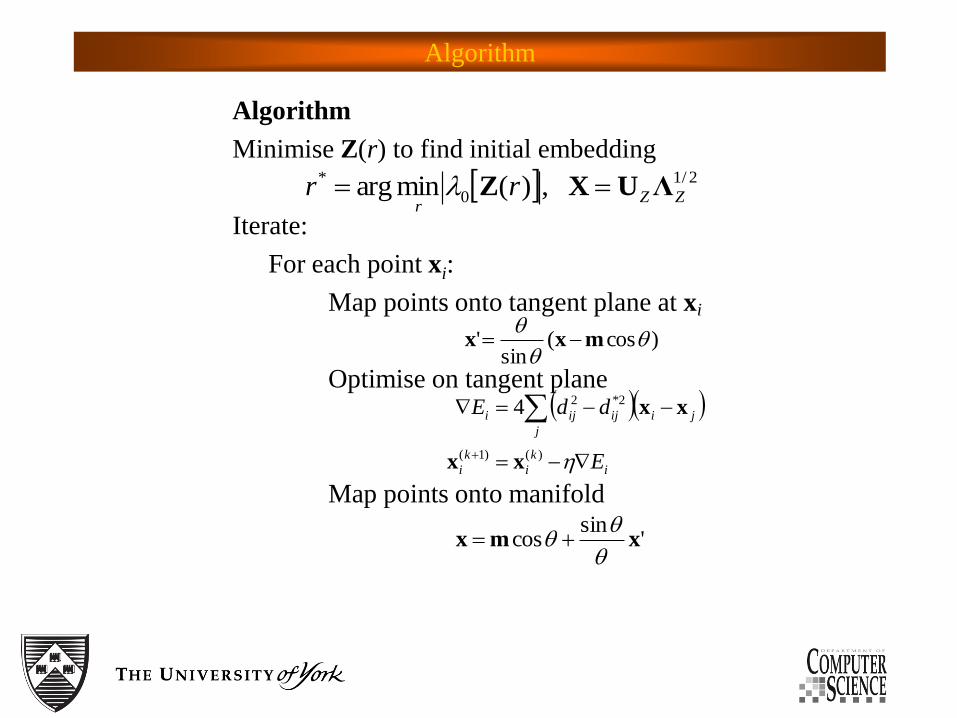
Algorithm
Algorithm
Minimise Z(r) to find initial embedding
Iterate:
For each point xi:
Map points onto tangent plane at xi
Optimise on tangent plane
Map points onto manifold
2/1
0
* ,)(minarg ZZr
rr ΛUXZ
)cos(sin
'
mxx
'sin
cos xmx
i
k
i
k
i
j
jiijiji
E
ddE
)()1(
2*24
xx
xx
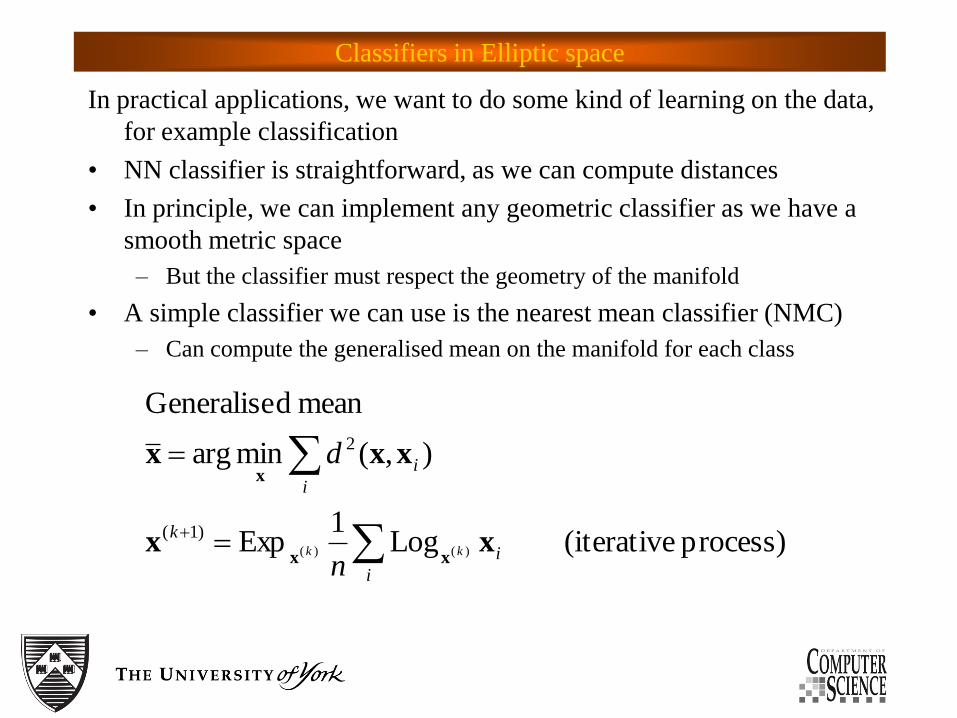
Classifiers in Elliptic space
In practical applications, we want to do some kind of learning on the data,
for example classification
• NN classifier is straightforward, as we can compute distances
• In principle, we can implement any geometric classifier as we have a
smooth metric space
– But the classifier must respect the geometry of the manifold
• A simple classifier we can use is the nearest mean classifier (NMC)
– Can compute the generalised mean on the manifold for each class
process) (iterative Log1
Exp
),(minarg
mean dGeneralise
)()(
)1(
2
i
i
k
i
i
kk
n
d
xx
xxx
xx
x
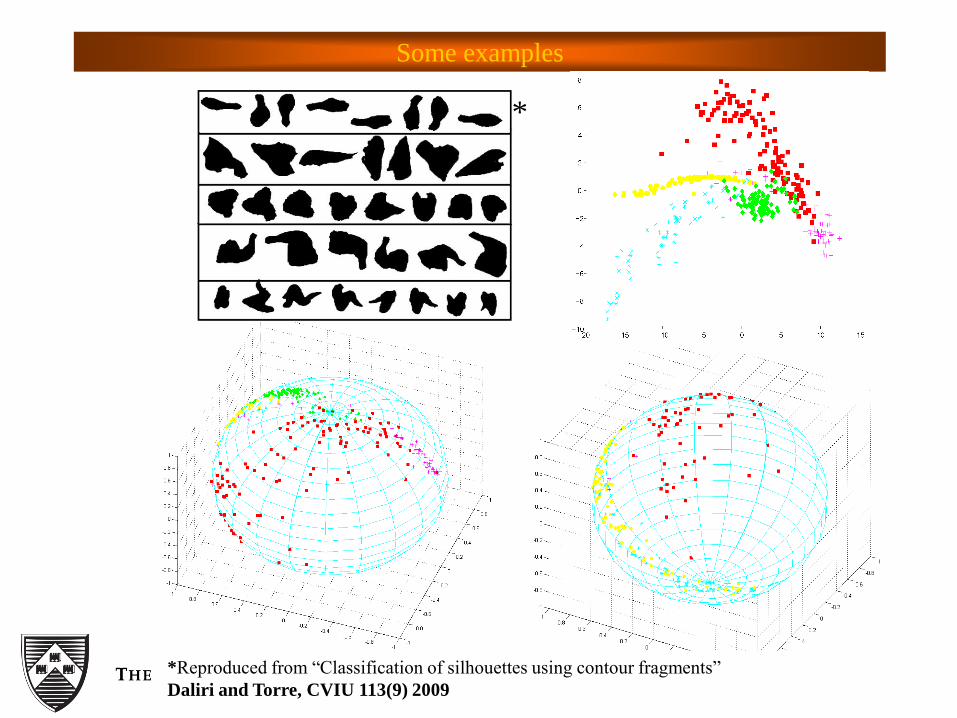
Some examples
*Reproduced from “Classification of silhouettes using contour fragments”
Daliri and Torre, CVIU 113(9) 2009
*
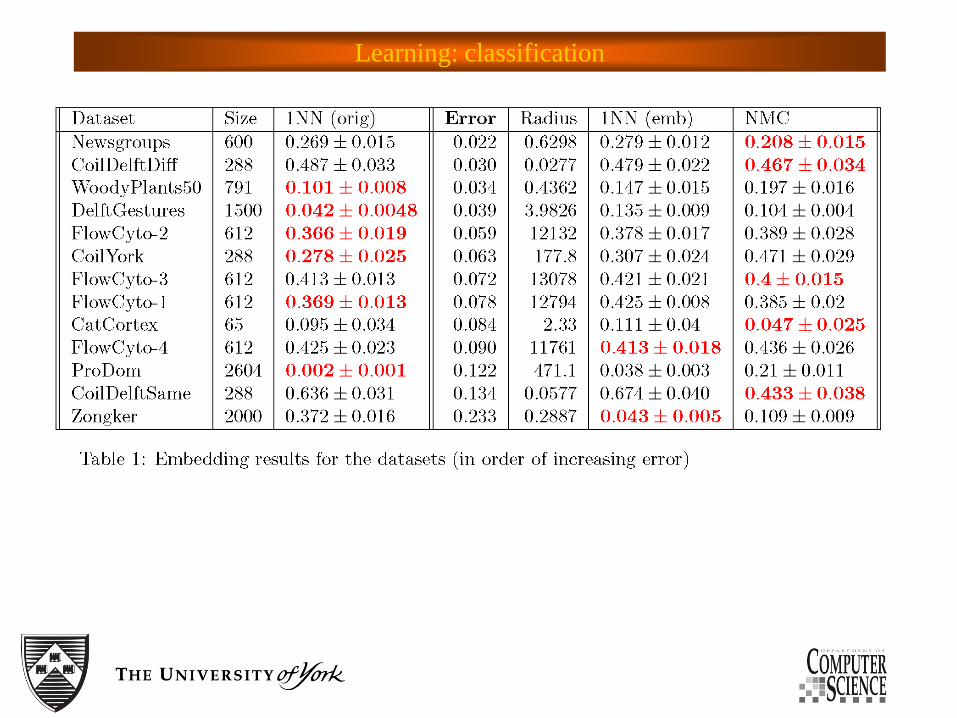
Learning: classification
Conclusions
• We can use Riemannian spaces to represent data from
dissimilarity measures when they cannot be represented in
Euclidean space
• Showed efficient method for embedding in elliptic space
which works on large datasets
– Produces embeddings of low distortion
• Can define simple classifiers which respect the manifold
– NN, NMC
• Need to extend to more sophisticated geometric classifiers


















