Sparse Independent Vector Analysis: Dictionary Design using a fast ICA/IVA Mixture Model 2008 SIAM...
40
Sparse Independent Vector Analysis: Dictionary Design using a fast ICA/IVA Mixture Model 2008 SIAM Conference on Imaging Science July 7, 2008 Jason A. Palmer Ken Kreutz-Delgado Scott Makeig University of California San Diego La Jolla, CA 92093
-
Upload
ashlie-parsons -
Category
Documents
-
view
214 -
download
1
Transcript of Sparse Independent Vector Analysis: Dictionary Design using a fast ICA/IVA Mixture Model 2008 SIAM...

Sparse Independent Vector Analysis: Dictionary Design using a fast
ICA/IVA Mixture Model
2008 SIAM Conference on Imaging ScienceJuly 7, 2008
Jason A. PalmerKen Kreutz-Delgado
Scott Makeig
University of California San DiegoLa Jolla, CA 92093
Outline• Want to do batch Maximum Likelihood
– Large amount of data– Maximum Likelihood asymptotically efficient
• Iterative estimation of the dictionary basis vectors—estimation of sources in overcomplete case is prohibitive– Use Adaptive Newton ICA Mixture Model
• Assumptions:– Only a small number of basis vectors used in each sample– Small number of subsets of bases recur, rather than all possible n choose m combinantions
– Generalized Gaussian Mixture model
• Independent (conditionally sparse and non-sparse) features
• Dependencies– Generalized Gaussian scale mixtures– Variance positive and negative covariance
• Examples– Image bases– EEG bases
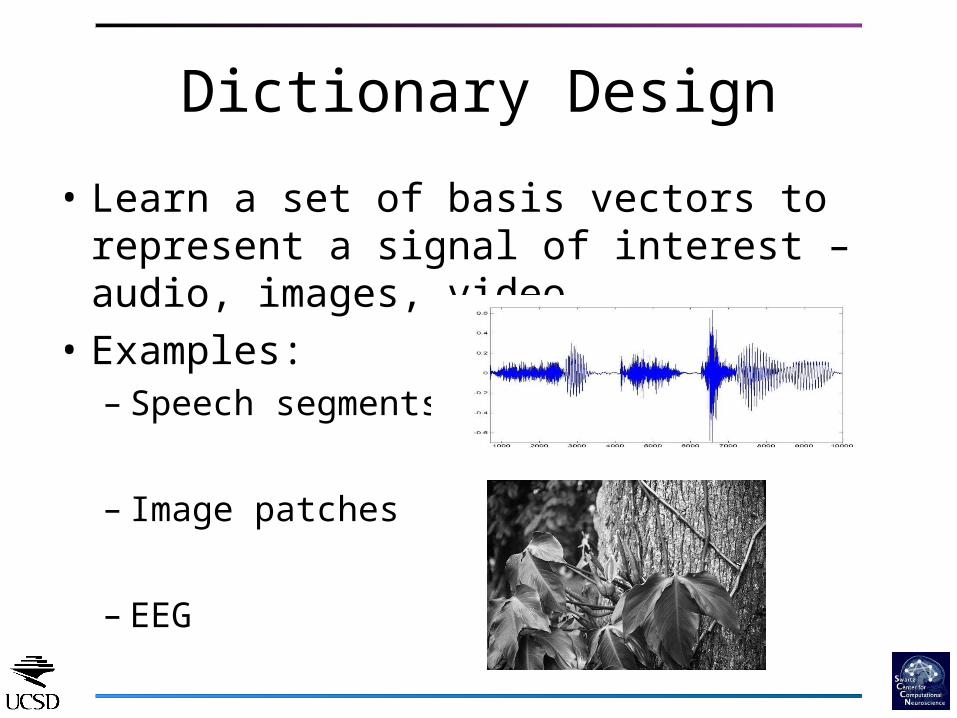
Dictionary Design
• Learn a set of basis vectors to represent a signal of interest – audio, images, video
• Examples:– Speech segments
– Image patches
– EEG
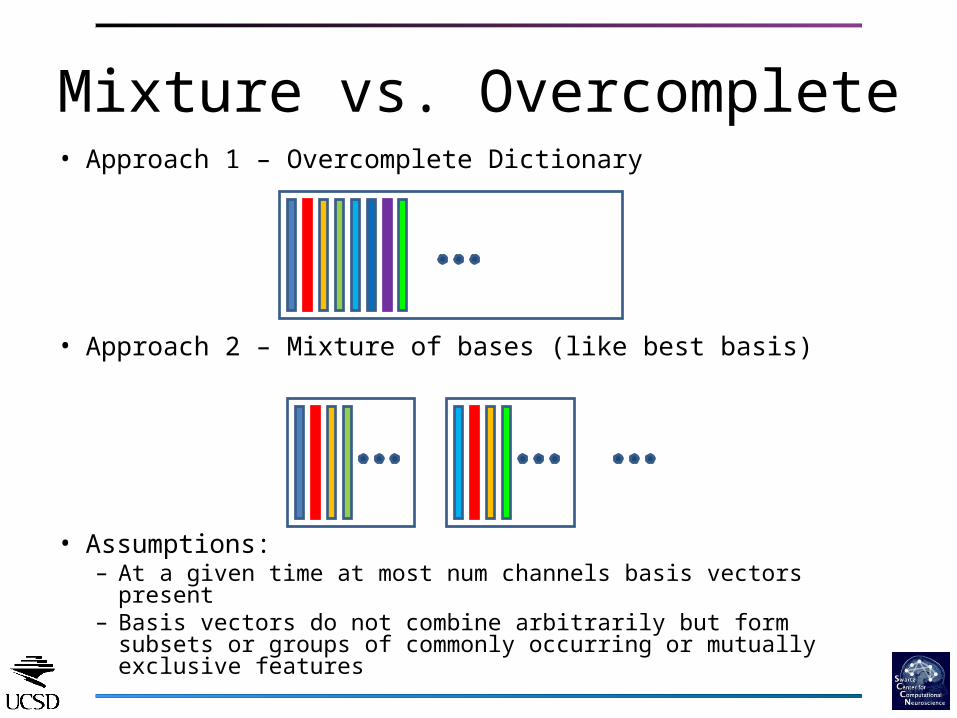
Mixture vs. Overcomplete• Approach 1 – Overcomplete Dictionary
• Approach 2 – Mixture of bases (like best basis)
• Assumptions:– At a given time at most num channels basis vectors present– Basis vectors do not combine arbitrarily but form subsets or
groups of commonly occurring or mutually exclusive features
Maximum Likelihood
• For dictionary design, we assume that a large amount of data is present
• Maximum Likelihood is asymptotically efficient (unbiased and minimum variance)
• Use a “batch” method, iteratively estimate dictionary
• Adapt source densities in an EM context, use a quasi-parametric source model – specifically a mixture model of Generalized Gaussians

ICA Mixture Model• Want to model observations x(t), t = 1,…,N,
different models “active” at different times• Bayesian linear mixture model, h = 1, . . . , M :
• Conditionally linear given the model, :
• Samples are modeled as independent in time:

• Each source density mixture component has unknown location, scale, and shape:
• Generalizes Gaussian mixture model, more peaked, heavier tails
Source Density Mixture Model

Computational Feasibility• We will use an iterative algorithm, in which the basic
steps are:– Estimate the sparse or independent sources or feature
activations given dictionary– Update dictionary based on estimated sources
• For large dimensional problems estimation of sources by iterative or even one-step methods takes non-trivial time, requiring inversion of a matrix for each sample– Example: data = 100 x 1,000,000, time to get sources = 1
ms per sample, one complete iteration takes at least 1000 seconds = 15 minutes, 500 iterations takes 6 days
– Need iterations to be order seconds, so need source estimation to be very fast (less than 1ms) – simple matrix multiplication , can’t afford inversion
Computational Feasibility – Newton
• Even with fast source estimation, we need iteration number to be order 100, not 10,000
• Gradient, and “natural gradient” methods are linearly convergent, very slow at the end
• Newton method yields feasible convergence time
• Using ICA/IVA mixture model allows implementation of Newton method without matrix inversions (2x2 block diagonal Hessian)

• Convergence is really much faster than natural gradient. Works with step size 1!
• Need correct source density model
20 40 60 80 100 120 140 160 180
-2.03
-2.02
-2.01
-2
-1.99
-1.98
-1.97
Convergence Rates
log likelihood
iterationiteration

Independence and Sparsity• Independence means source density factorizes• Sparsity means source density has heavy tails and
high probability of zero• Usually both are assumed• True feature independence may be more useful
than artificially imposed sparsity– Decision theoretic calculations (integrals) simplified
due to density factorization– Coding may be improved by producing true
“innovations” without “interference” in errors• Sparse estimation amounts to enforcing a
particular form (sparse) on the source densities
Marginal Sparsity & Conditional Density
• Sources may only be sparse when considered as on/off sources– Speech– Edges
• Using a conditional mixture model, one can localize the model to the “active” periods, where conditional density is modeled
• This may or may not be sparse – again it can be enforced if desired
Dependence• Not generally possible to decompose
observations into a set of independent features• Types of dependency– Variance dependence (co-occuring features), AB– Mutual exclusion A(not B)
• Gaussian Scale mixtures– Simoncelli, Wainwright – multiscale wavelet
coefficients, steerable pyramid– GSMs are spherically symmetric – not sparse within
subspace• Generalized Gaussian Scale mixtures – maintain
sparsity (directionality) within feature subspace while modeling dependence
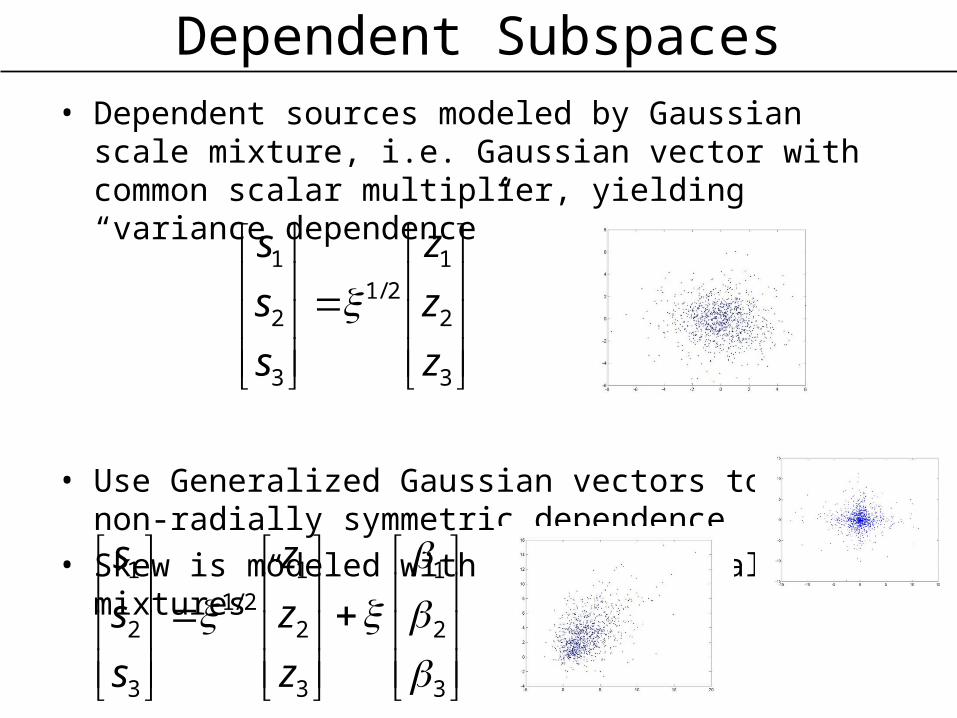
Dependent Subspaces• Dependent sources modeled by Gaussian scale mixture, i.e.
Gaussian vector with common scalar multiplier, yielding “variance dependence”
• Use Generalized Gaussian vectors to model non-radially symmetric dependence
• Skew is modeled with “location-scale mixtures”
3
2
12/1
3
2
1
z
z
z
s
s
s
3
2
1
3
2
12/1
3
2
1
z
z
z
s
s
s
Dependence – Mutual exclusion
• A(not B)• Gaussian Scale mixtures can be used with
Generalized Inverse Gaussian mixing density• Feature A activation is scaled in inverse
proportion to Feature B activation• Examples:– Edges pointing in different directions at same
location– EEG sources responding to exclusive events
Detection of Variance dependence• Variance dependence (subspace structure) can be
determined a priori and enforced, or can be estimated• Estimation strategy – start with assumption of
independence and detect deviations in pairs – then group• Both types of variance dependency can be modeled by
“variance correlation”– Positive variance dependency implies power (variance) in
feature A is high when feature B is high, and A is low when B is low
– Negative variance dependency implies that high power in A implies low power in B (relative to its mean power, or variance)
• If power correlation is large and positive, then features are assigned to variance dependent subspace
• If power correlation is large and negative, then features (or their subspaces) are assigned inverse variance dependence

ICA Mixture Model – Images
• Goal: find an efficient basis for representing image patches. Data vectors are 12 x 12 blocks.
Covariance Square Root Sphere Basis
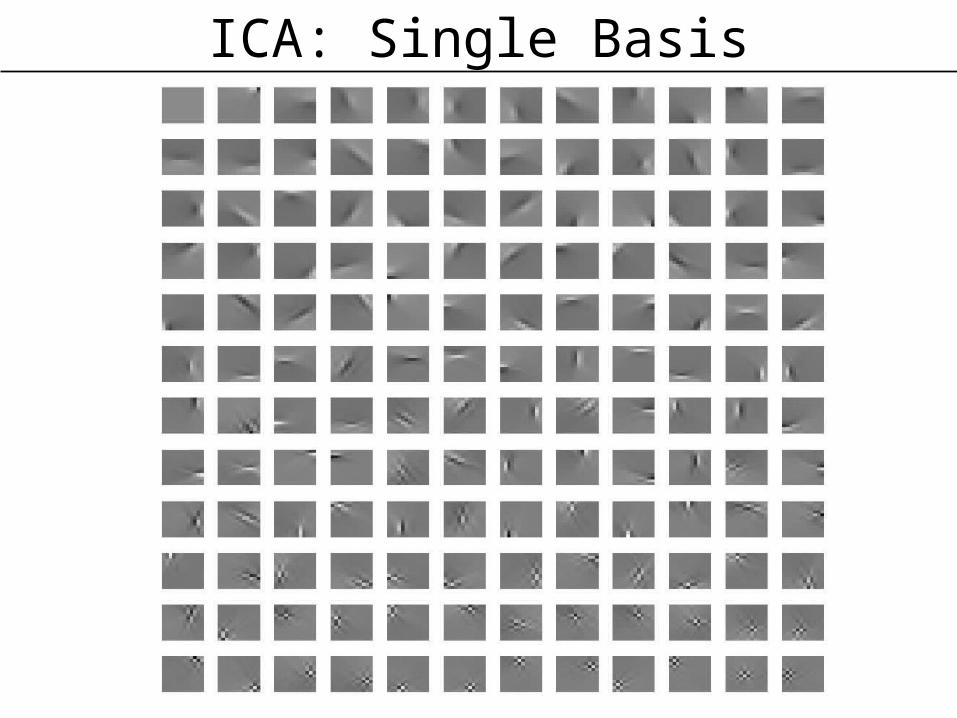
ICA: Single Basis
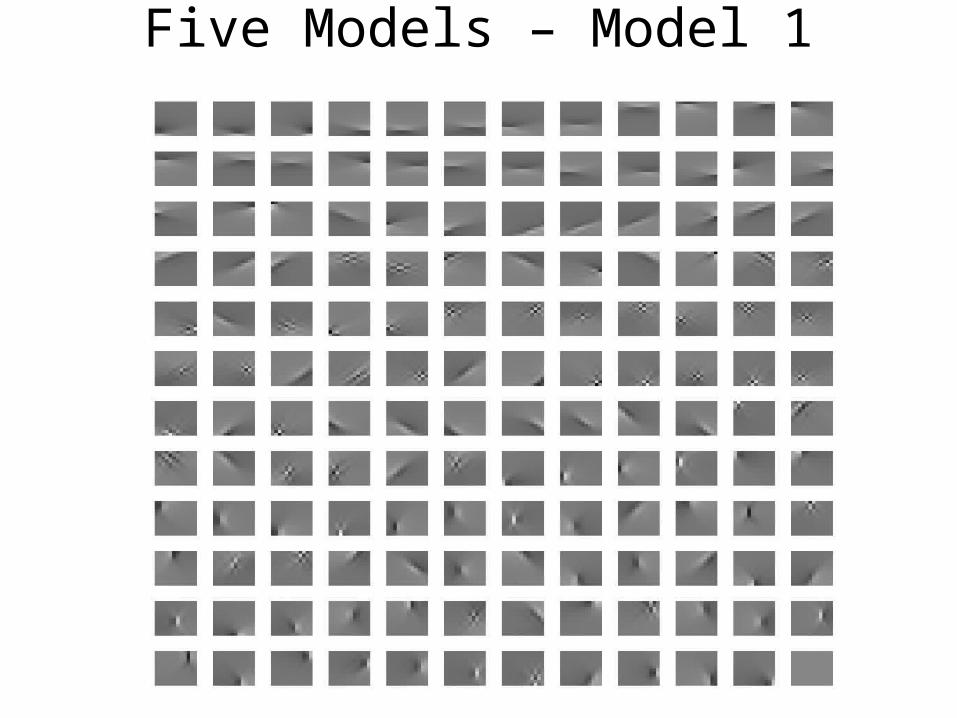
Five Models – Model 1
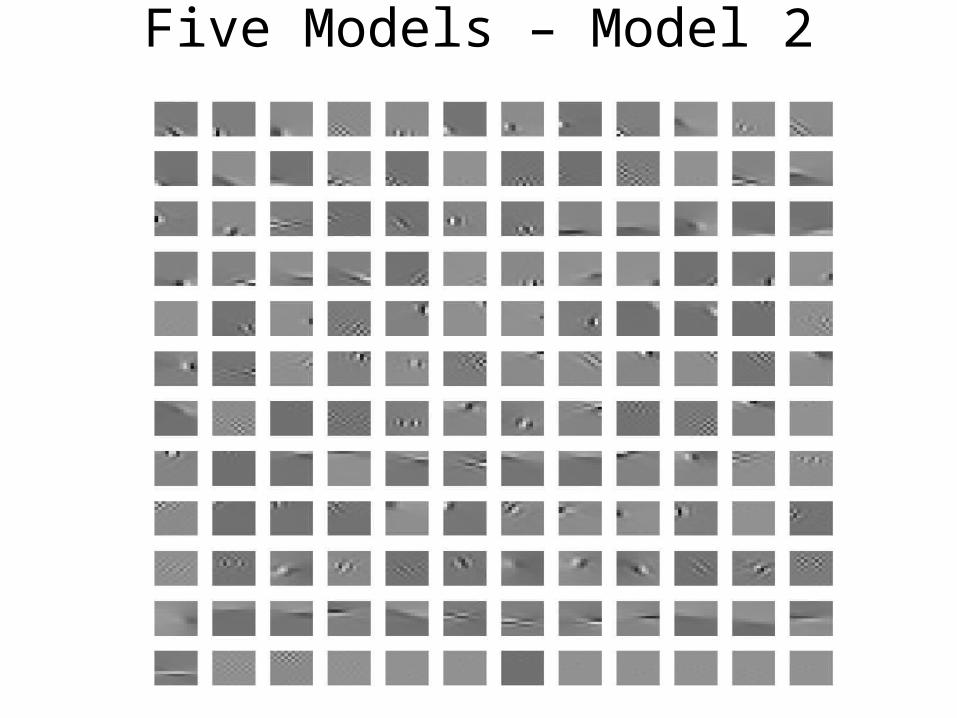
Five Models – Model 2

Five Models – Model 3

Five Models – Model 4
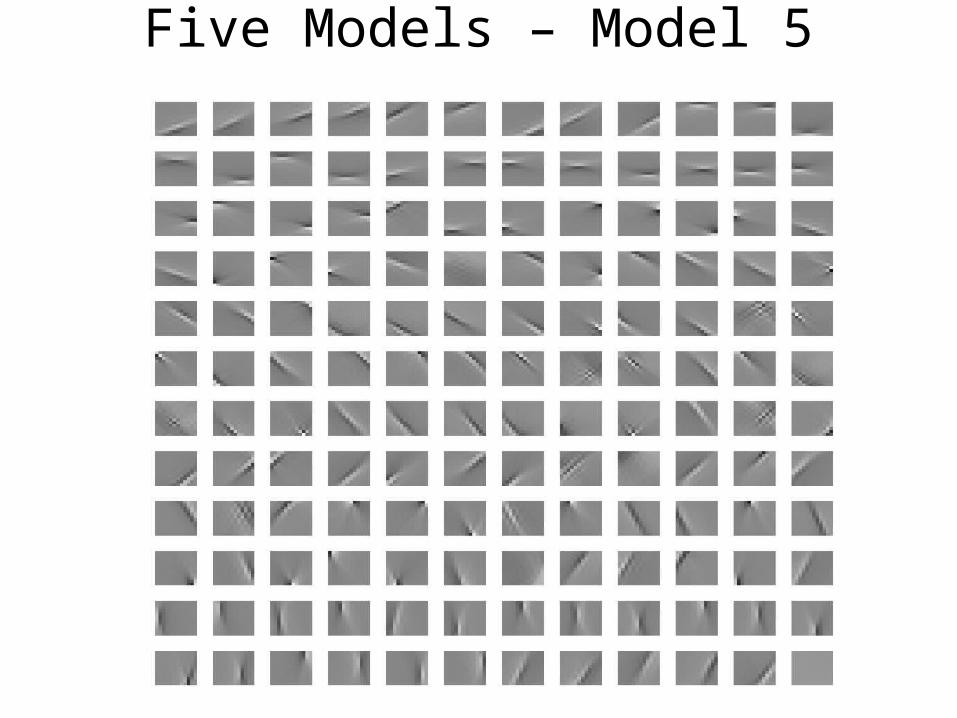
Five Models – Model 5

Variance Dependence
• Variance dependence can be estimated directly using 4th order cross moments
• Find covariance of source power:
• Finds components whose activations are “active” at the same or mutually exclusive times
22 )(,)( tsts jiCov

Variance Correlation – Model 1Before Grouping After Grouping
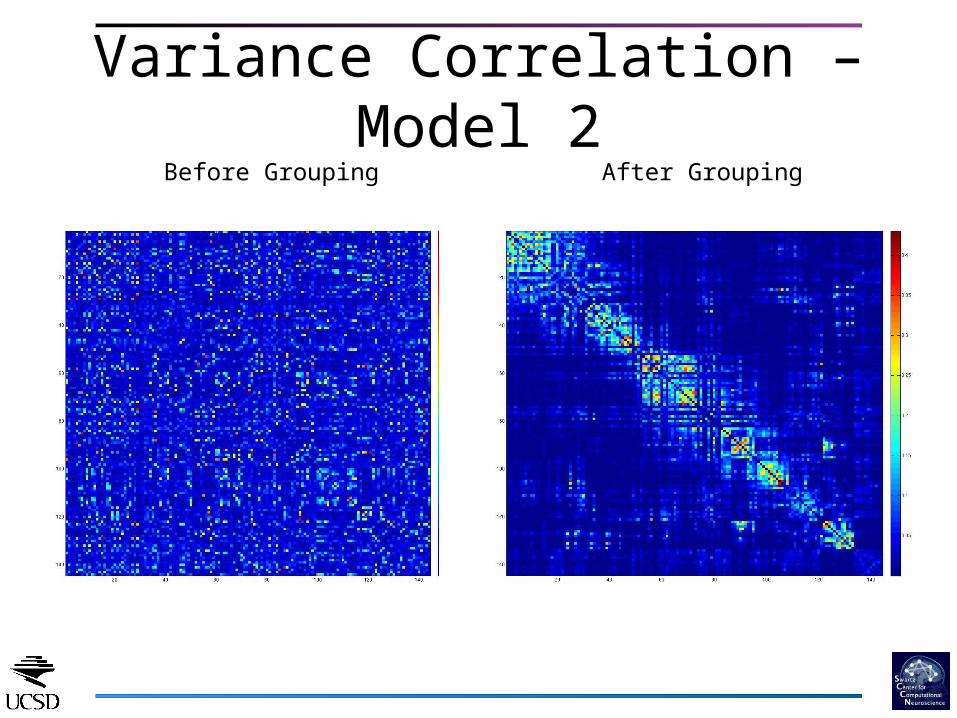
Variance Correlation – Model 2Before Grouping After Grouping
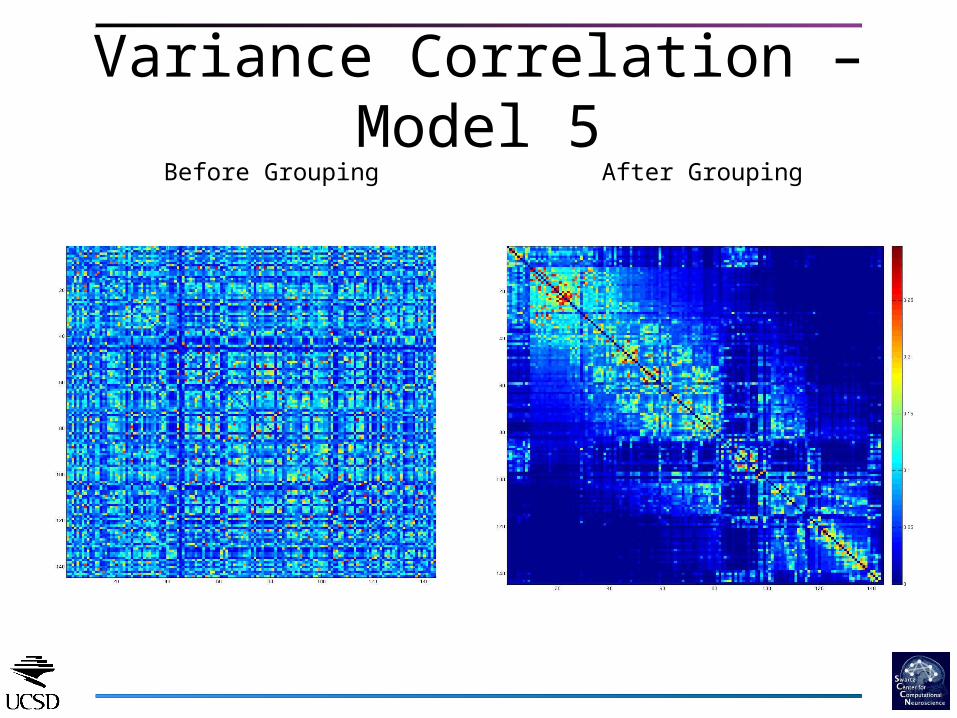
Variance Correlation – Model 5Before Grouping After Grouping
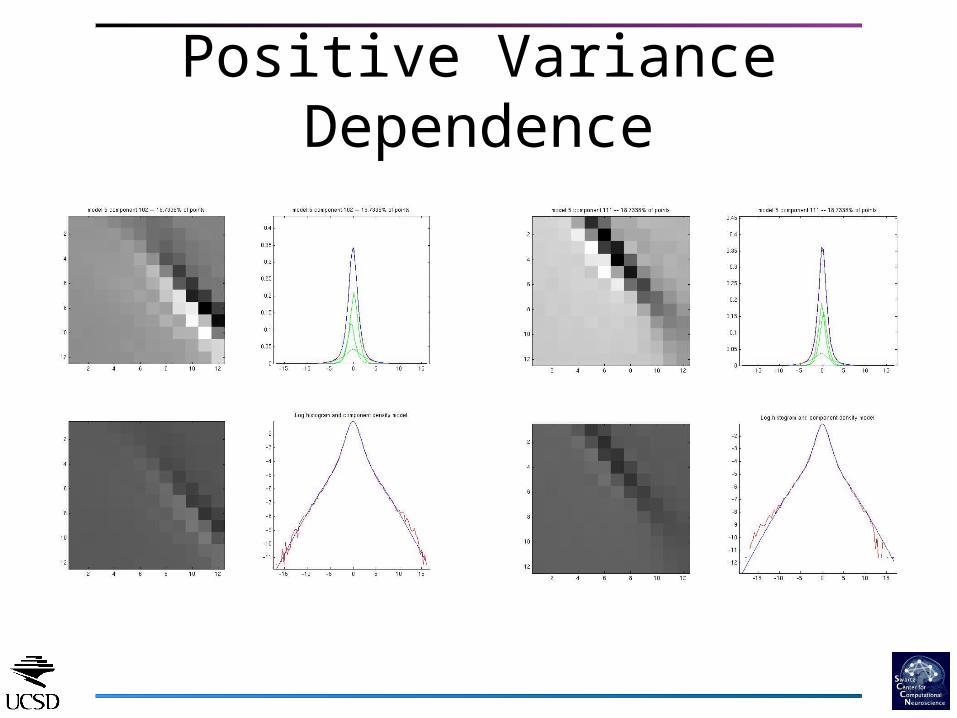
Positive Variance Dependence
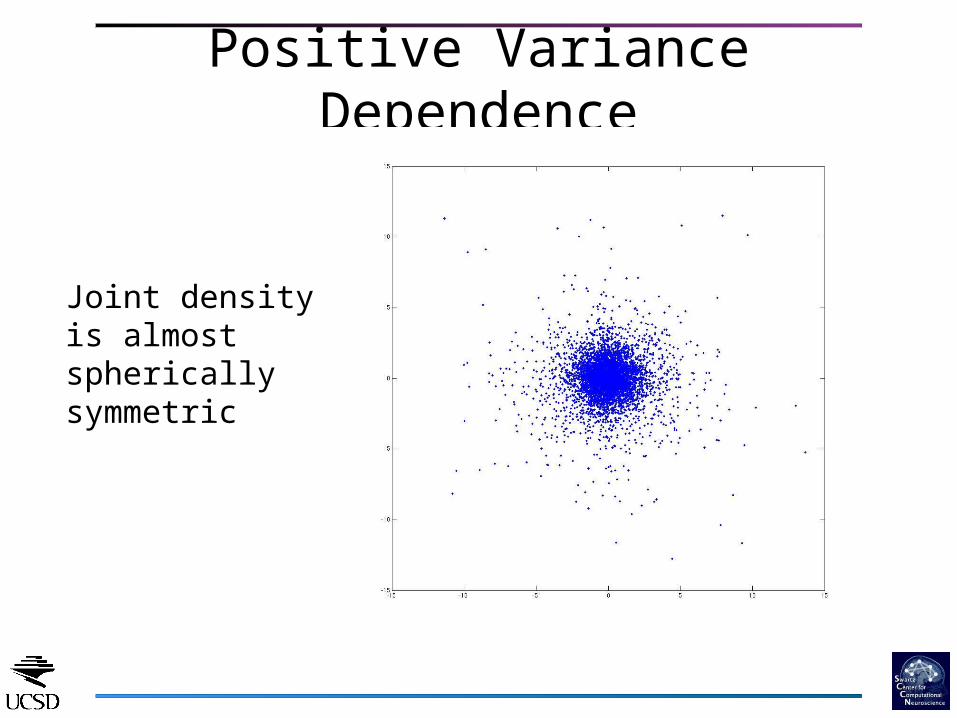
Positive Variance Dependence
Joint density is almost spherically symmetric
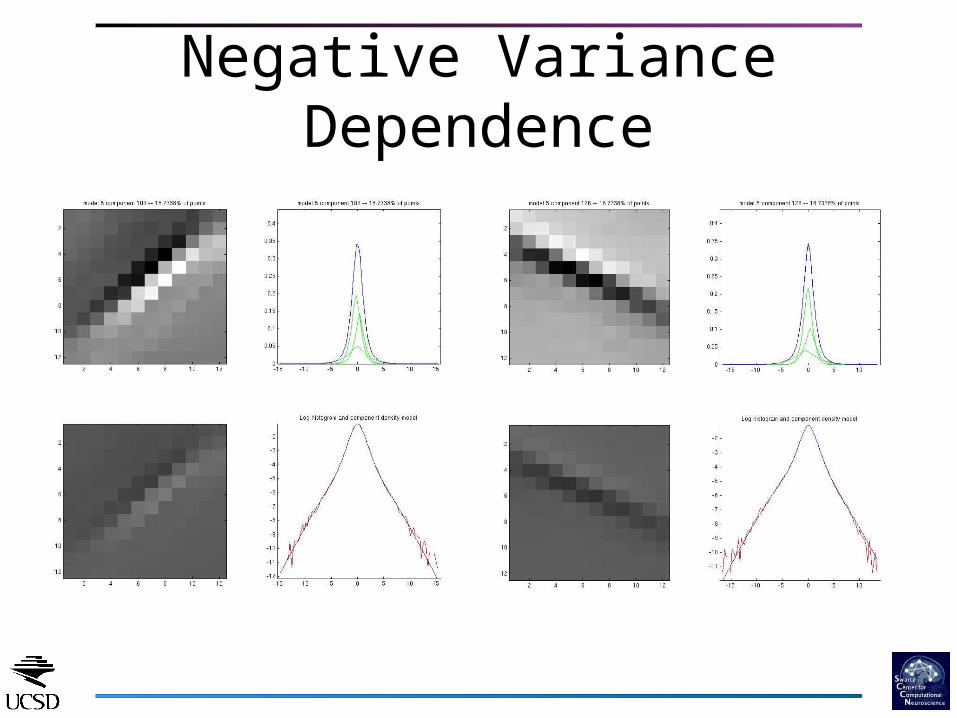
Negative Variance Dependence

Negative Variance Dependence
Joint density has less common activity than product of marginals
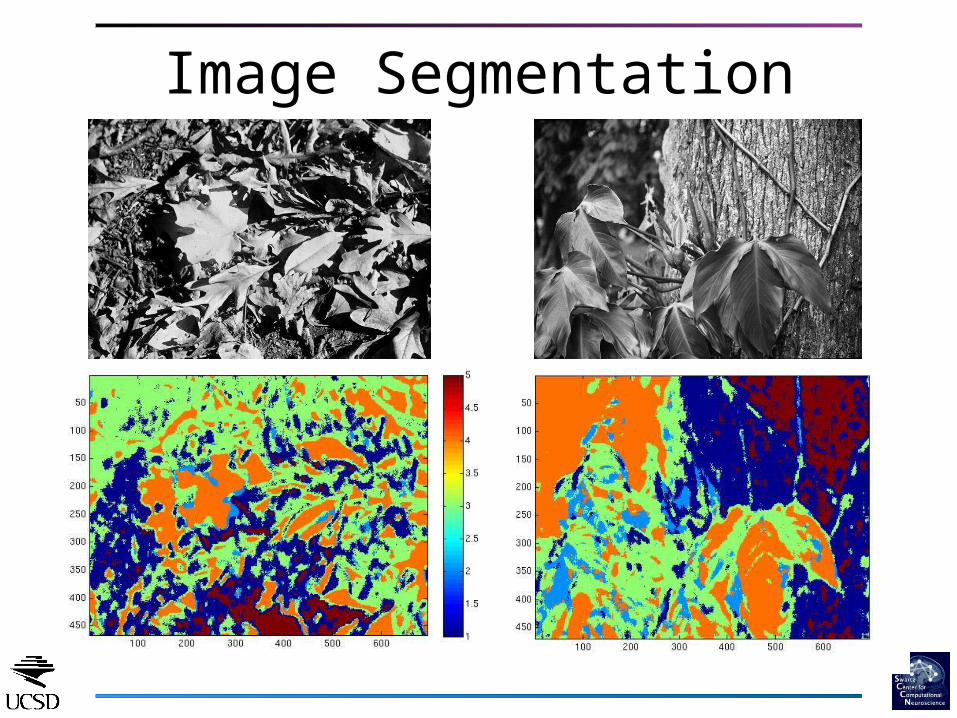
Image Segmentation

Image Segmentation 2
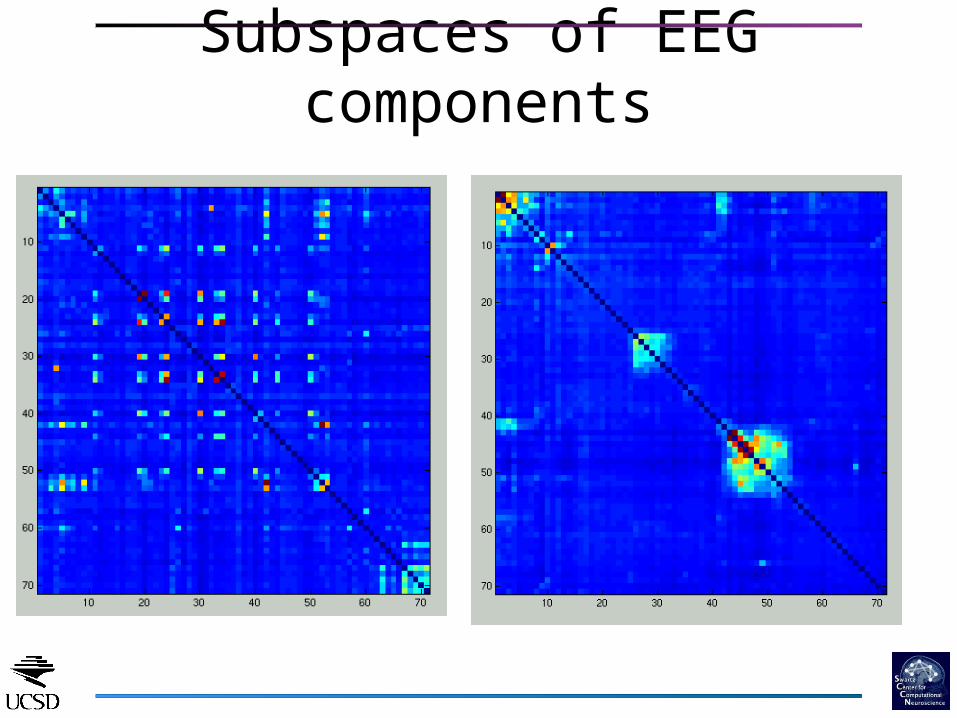
Subspaces of EEG components
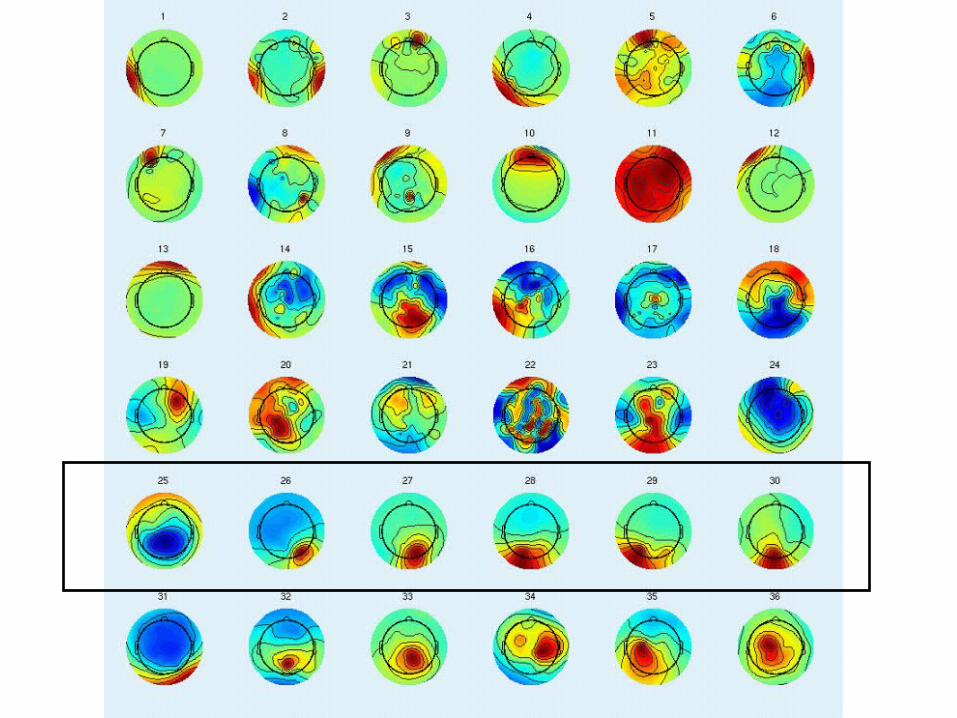
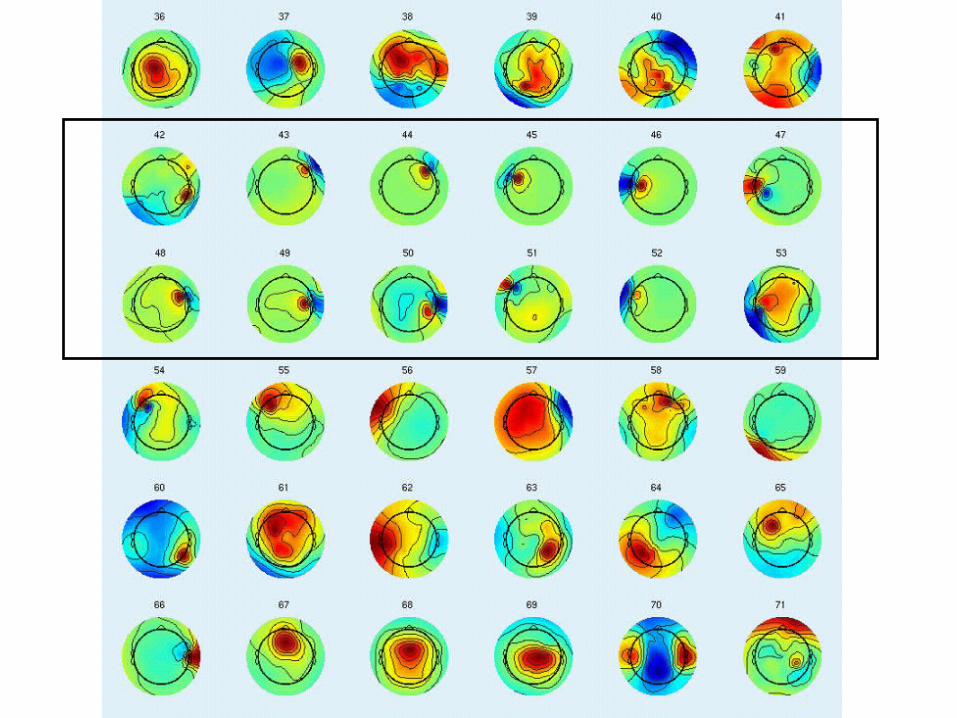
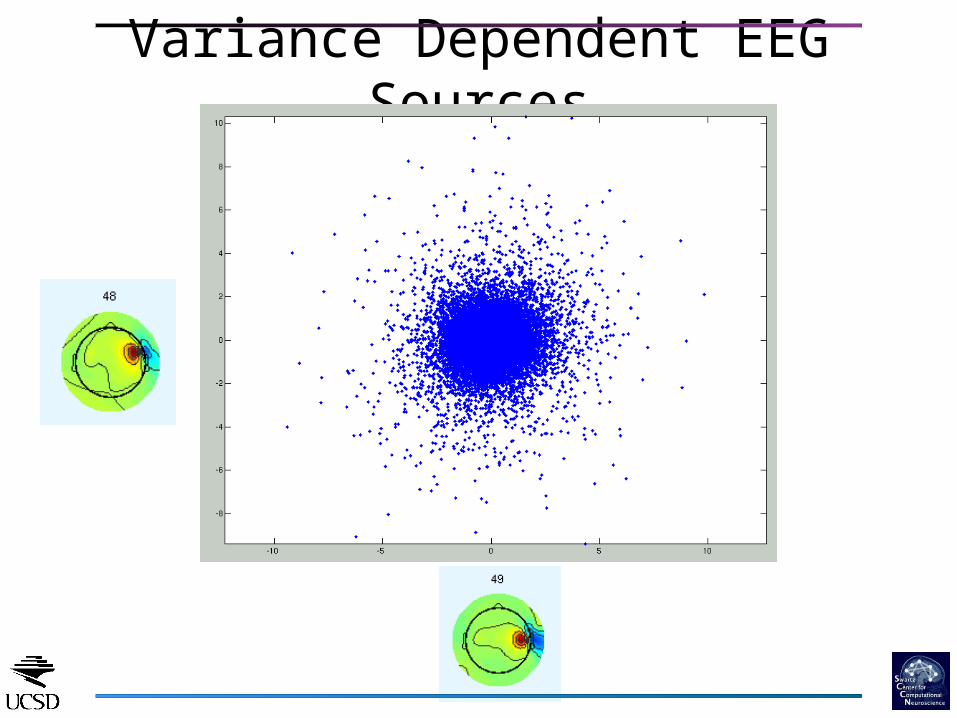
Variance Dependent EEG Sources
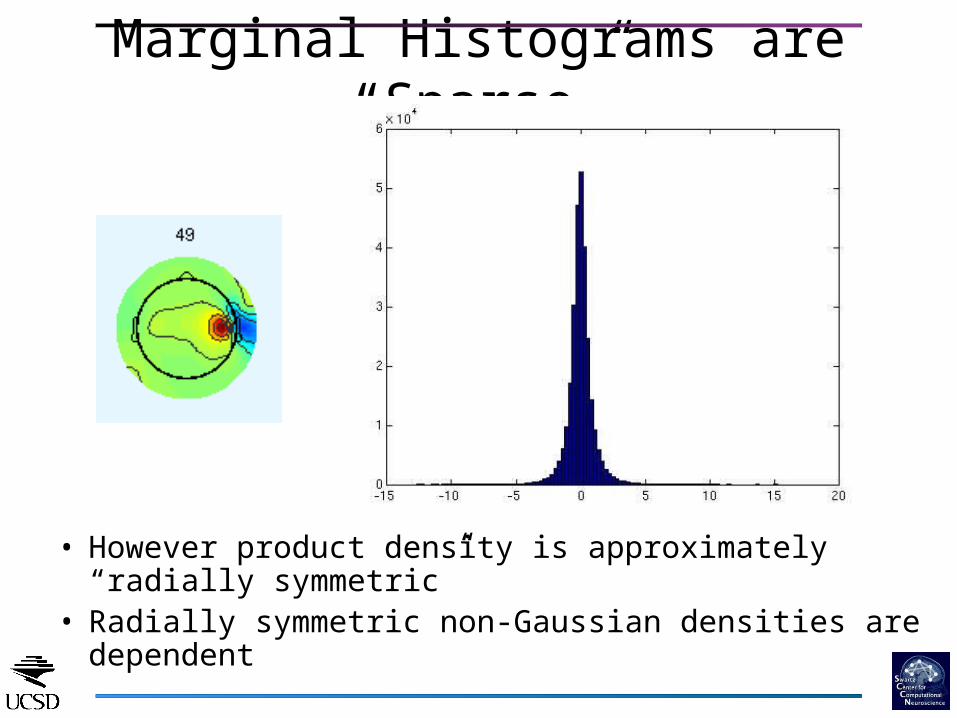
Marginal Histograms are “Sparse”
• However product density is approximately “radially symmetric”
• Radially symmetric non-Gaussian densities are dependent
Conclusion
• We presented an efficient method for learning an overcomplete set of basis
• A Newton algorithm is used with adaptive source densities and a mixture of basis sets
• Dependency is modeled using Generalized Gaussian Scale mixtures
• Variance dependency is detected using variance correlation, which is faster to calculate than mutual information