Space Collision Avoidance using Interval Analysis
164
Space Collision Avoidance using Interval Analysis A Literature Survey Bart R¨ omgens
-
Upload
bart-romgens -
Category
Documents
-
view
228 -
download
1
description
Space Collision Avoidance
Transcript of Space Collision Avoidance using Interval Analysis

Space Collision Avoidance usingInterval Analysis
A Literature Survey
Bart Romgens

Space Collision Avoidance usingInterval Analysis
A Literature Survey
Author:Bart Romgens
Supervisor:dr.ir. E. Mooij
October 6, 2009

Contents
Contents I
Preface IV
List of Symbols V
List of Abbreviations VIII
1 Introduction 1
2 Collisions in Space 32.1 Objects in Space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.1 Active Satellites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.1.2 Manned Missions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.1.3 Space Debris . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.1.4 Asteroids, Comets and Meteoroids . . . . . . . . . . . . . . . . . . . . 15
2.2 Collisions in Earth Orbit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2.1 History of Collisions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2.2 Collision Effects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.2.3 Future of Collisions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.3 Collision Avoidance Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.3.1 Orbit Determination . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.3.2 Collision Prediction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.3.3 Maneuver Strategies . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.3.4 Space Debris Removal . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3 Astrodynamics 283.1 N-body Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.1.1 General Equations of Motion . . . . . . . . . . . . . . . . . . . . . . . 283.1.2 Relative Equations of Motion . . . . . . . . . . . . . . . . . . . . . . . 303.1.3 Constants of Motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.1.4 Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2 Reference Frames . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.2.1 Transformations between Reference Frames . . . . . . . . . . . . . . . 36
3.3 Perturbing Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.3.1 Earth’s Gravity Field . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.3.2 Gravitational Attraction by other Celestial Bodies . . . . . . . . . . . 403.3.3 Aerodynamic Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.3.4 Radiation Pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
I

3.3.5 Electromagnetic Forces . . . . . . . . . . . . . . . . . . . . . . . . . . 413.3.6 Relativistic Effects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.3.7 Thrust . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.3.8 Enclosing Perturbing Forces . . . . . . . . . . . . . . . . . . . . . . . . 42
3.4 Perturbation Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433.4.1 Method of Encke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.4.2 Variation of Orbital Elements . . . . . . . . . . . . . . . . . . . . . . . 443.4.3 Singularities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.5 Uncertainties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.5.1 Physical Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.5.2 Physical Constants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483.5.3 Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4 Unified State Model 504.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.1.1 Phase Space and Velocity Hodograph . . . . . . . . . . . . . . . . . . 504.1.2 Rotations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.1.3 Transformations between Rotation Representations . . . . . . . . . . . 55
4.2 Reference Frames . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.3 State Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.3.1 Cartesian Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.3.2 Kepler Elements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594.3.3 Unified State Model Variables . . . . . . . . . . . . . . . . . . . . . . . 60
4.4 Variation of Unified State Variables . . . . . . . . . . . . . . . . . . . . . . . . 644.5 Perturbing Forces in the Unified State Model . . . . . . . . . . . . . . . . . . 65
5 Conventional ODE Integration 685.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 685.2 Numerical Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.2.1 Taylor Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 705.2.2 Euler Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 715.2.3 Runge-Kutta Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . 715.2.4 Multistep Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.3 Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 735.4 Accuracy Properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.4.1 Convergence and Order . . . . . . . . . . . . . . . . . . . . . . . . . . 755.4.2 Stability and Stiffness . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.5 Random Error Propagation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765.5.1 Monte Carlo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 775.5.2 Covariance Matrix Propagation . . . . . . . . . . . . . . . . . . . . . . 77
6 Interval ODE Integration 806.1 Interval Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.1.1 Interval Arithmetic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 826.1.2 Interval Algebraic Properties . . . . . . . . . . . . . . . . . . . . . . . 836.1.3 Inclusion Monotonic Interval Extensions of Functions . . . . . . . . . 836.1.4 The Dependency Problem . . . . . . . . . . . . . . . . . . . . . . . . . 846.1.5 Interval Intersections . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
6.2 Interval Taylor Series Methods . . . . . . . . . . . . . . . . . . . . . . . . . . 866.2.1 Bounding Taylor Series . . . . . . . . . . . . . . . . . . . . . . . . . . 86
II

6.2.2 A Priori Enclosure (Verifying Existence and Uniqueness) . . . . . . . 886.2.3 Interval Integration using Bounded Taylor Series . . . . . . . . . . . . 926.2.4 Reducing the Wrapping Effect . . . . . . . . . . . . . . . . . . . . . . 95
6.3 Taylor Model Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1026.3.1 Taylor Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1036.3.2 Verified ODE Integration . . . . . . . . . . . . . . . . . . . . . . . . . 1036.3.3 Reducing the Wrapping Effect . . . . . . . . . . . . . . . . . . . . . . 1046.3.4 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1056.3.5 Interval Evaluation of Taylor Model Solutions . . . . . . . . . . . . . . 108
6.4 Interval Runge-Kutta Methods . . . . . . . . . . . . . . . . . . . . . . . . . . 1096.5 Bounding Rounding Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1116.6 Automatic Interval Differentiation . . . . . . . . . . . . . . . . . . . . . . . . 112
6.6.1 Finite Difference Numerical Differentiation . . . . . . . . . . . . . . . 1126.6.2 Symbolic Differentiation . . . . . . . . . . . . . . . . . . . . . . . . . . 1136.6.3 Interval Taylor Coefficients using Automatic Differentiation . . . . . . 113
6.7 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1186.7.1 Interval Arithmetic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1186.7.2 Automatic Differentiation . . . . . . . . . . . . . . . . . . . . . . . . . 1196.7.3 Interval ODE Integration . . . . . . . . . . . . . . . . . . . . . . . . . 119
6.8 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1236.8.1 Space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1236.8.2 Other . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
7 Thesis Assignment 1297.1 Research Question . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1297.2 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1297.3 Computer Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
7.3.1 Software Tools and Libraries . . . . . . . . . . . . . . . . . . . . . . . 1317.3.2 Software Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . 1317.3.3 Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1317.3.4 Interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1347.3.5 Unit Tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1357.3.6 Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1367.3.7 Verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1377.3.8 Parallel Computing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
7.4 Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1387.5 Tasks and Schedule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Appendix A - Transformations 140
Bibliography 144
III

Preface
This literature survey is part of the MSc. in Aerospace Engineering, profile Astrodynamicsand Space Missions, at Delft University of Technology. It is the preparatory work for thefinal MSc. thesis that completes the MSc. degree.
I want to thank my supervisor Erwin Mooij for letting me free in my own research andlearning process while guiding me when necessary. I also want to thank the one and almightyFlying Spaghetti Monster for supporting me during rough times.
This is the digital PDF version of this report. It has a few features to improve the readingexperience. The chapters and sections in the table of contents are linked to the correspond-ing chapters and sections; simply click on the chapter or section you want to read. A tableof contents is also available in the sidebar of your PDF reader. Furthermore, the chapter,section, figure, table, algorithm and equation numbers mentioned in the text are linked tothe actual chapter, section, figure, etc. The same goes for the references, click the referencenumber between square brackets to move to that particular reference in the bibliography.
IV

List of Symbols
Astrodynamics
r position vectorv velocity vectora acceleration vectorF a force vectorm massG the gravitational constantµ standard gravitational parameterH angular momentum vectorV orbital speed (size of velocity vector)C orbital energye eccentricity (Kepler Element)a semi-major axisi inclinationΩ longitude of the ascending nodeω argument of periapsisθ true anomalyE eccentric anomalyM mean anomalyτ time of pericenter passageω angular velocity vectorR planet radiusU gravitational potentialJn represents the influence of deviations in the mass density distribution in North-South directionJn,m the influence of mass distribution in the North-South and East-West directionφ latitudeΛ longitudeρ atmospheric densityρ0 atmospheric density at mean sea levelCD drag coefficientS frontal satellite areaW power density of incoming sunlightCR satellite reflectivityS∗ effective surface area to the Sunc speed of light
V

B magnetic induction of Earth’s magnetic fieldg1 geomagnetic parameterq electric charge of the satellitem mass flowIsp specific impulseg0 gravitational acceleration at the Earth’s surfaceρ reference orbit position vectorαi nr i of six Kepler elementsfS force component in the radial directionfN force component perpendicular to the radius vector in the orbital planefW force component perpendicular to the orbital planep semi-latus rectumu argument of latitude
Unified State Model
Tib transformation matrix from frame b to iq a quaternionq4 Euler parameter defining the scalar quaternion partq1, q2, q3 Euler parameters defining the vectorial quaternion part(g1, g2, g3) planetocentric inertial reference frame unit vectors(f1, f2, f3) intermediate reference frame unit vectors(e1, e2, e3) rotating body frame unit vectorsC USM variable related to angular momentumRf1 USM variable related to angular and radial momentumRf2 USM variable related to angular and radial momentumvr relative velocity to the atmosphereωe planetary rate of rotationM Mach number
Conventional ODE Integration
x first time derivativeRn Taylor series remainder term of order nh stepsizeCP covariance matrixei+1 local truncation error at step nΦ state transition matrixp order
VI

Interval ODE Integration
[x] interval variable x
¯x lowest endpoint of interval [x]x highest endpoint of interval [x]w([x]) width of interval [x]m([x]) midpoint of interval [x]Rn(t) Taylor series remainder term, local truncation errorh stepsize[x] a priori interval enclosure[x] guessed interval enclosurex(t) true solution[c] interval parameter (constant)J JacobianAj transformation matrixR triangular matrixQ orthogonal matrixP polynomial part of a Taylor Model[R] interval part of a Taylor ModelA() Banach operator
VII

List of Abbreviations
AD Automatic DifferentiationCA Conjunction AssessmentCAM Collision Avoidance ManeuverCAS Collision Avoidance SystemECIRF Earth Centered Inertial Reference FrameECEF Earth Centered Earth FixedGEO Geostationary OrbitGPS Global Positioning SystemHEO High Elliptical OrbitICAS Interval Collision Avoidance SystemICRF International Celestial Reference FrameISS International Space StationITS Interval Taylor SeriesIVP Initial Value ProblemLEO Low Earth OrbitMEO Medium Earth OrbitODE Ordinary Differential EquationPDF Probability Density FunctionRK Runge KuttaRPL Reactor Pumped LaserTM Taylor ModelsUCS Union of Concerned ScientistsUSM Unified State ModelUS SSN United States Space Surveillance Network
VIII

Chapter 1
Introduction
Two active satellites, Iridium 33 and Kosmos-2251, collided with a relative speed of 11.7km/s at 790 km above Siberia on February 10, 2009. It was the first accidental collisionbetween two intact satellites. Both were completely destroyed and created two large debrisclouds orbiting the Earth.
Collisions between Earth satellites are rare, but will increase with increasing number ofsatellites and space debris. A single collision has a large impact on the amount of spacedebris, because space debris is primarily created by collisions. More space debris in turncreates more collisions, which creates more space debris. In orbits where drag is too smallto remove debris faster than it is created, those regions will end up full of very small debris.
Affordable space tourism is still fiction, but may finally become reality in the comingdecades. With more humans in space, the probability of fatal collisions increases. A SpaceCollision Avoidance System (CAS) may be necessary to safe lives and keep a safe recordfor the space tourism industry. Such a CAS is already used for the Space Shuttle and ISS,but is only based on a collision probability estimate. The methods discussed in this surveycould lead to a more secure CAS that can rule out collisions.
On a larger scale, outside Earth orbits, there are asteroids orbiting the Sun that maycollide with Earth. Although a collision between a large asteroid and Earth is very rare, theresults of such an impact are disastrous; most life on Earth may be killed, depending on thesize and speed of the asteroid.
This literature survey is the preparatory work for a research into the feasibility of guar-anteed collision avoidance; a secure space traffic control system. It combines and orders allnecessary information for the computer implementation of a method that simulates satelliteand asteroid orbits in such a way that it is possible to rule out collisions, or change the orbitso that collisions can be ruled out.
A complete CAS consists of three components; orbit determination, orbit propagation(simulation), collision determination and avoidance maneuvers. Orbit determination pro-vides the necessary input, position and velocity, for orbit propagation. Orbit propagationpredicts future positions of satellites and checks whether they may collide. If a collisionmay occur, one or both satellites will have to change their orbit by means of an avoidancemaneuver. Although all three components are interlinked, this research focusses on the orbitpropagation component of the CAS.
The problem with conventional orbit propagation methods is that they only yield anapproximation; the integration method is not exact. Uncertainties in the model’s parametersand uncertain position and velocity from orbit determination, make the predicted orbit anapproximation for which the error is not known. These unknown errors are acceptable for
1

Chapter 1. Introduction
most space applications, but cannot be ignored for guaranteed collision avoidance.To solve this problem, a different type of propagation method is investigated, Interval
Integration. This method produces a region around the ”nominal” orbit that containsall possible errors and uncertainties. This means that the orbit can be guaranteed, bymathematical proof, to be within that region, taking all errors and uncertainties into account(the satellite is assumed to be within a certain region at the moment of orbit determination).
The regions around the nominal orbit can be represented by intervals, a set of realnumbers that extend single values to a continuous range of values, represented by twonumbers, the upper and lower bound. This makes it easy to check whether two intervalregions intersect. If they do not intersect, collision is ruled out.
The problem with this new interval propagation (integration) method is that the size ofthe region tends to grow very fast with increasing propagation time. Therefore, a few dif-ferent orbital models that may reduce this growth will be investigated. One of these modelsis called the Unified State Model, which has only once been applied after its developmentin 1972 by Altman [1].
The structure of this survey is as follows. Chapter 2 gives an overview of objects inspace, collisions between objects and current ways to prevent these collisions. This chapterprovides the context for the other, more mathematical and physical, chapters. Chapter3 presents the conventional differential equations that model the motion of a satellite. Italso presents models for perturbation forces that may act on a satellite. Examples areatmospheric drag and solar radiation pressure. Chapter 4 presents the earlier mentionedUnified State Model and provides all information for its first application. Chapter 5 providesa brief overview of conventional integration (propagation) methods that yield a single line(no region) without errors bounds. Chapter 6 presents the new interval integration methodsthat produce a region in which the satellite is guaranteed to be. This is the main topicof research and provides all information, including software tools, to apply the method tocollision avoidance. The literature survey ends with Chapter 7, an outline and schedule forthe actual implementation of all the methods in this survey into a single CAS based oninterval integration.
2

Chapter 2
Collisions in Space
The Solar System is mostly empty space, only 0.25% of its mass resides outside the Sun,where collisions between two objects seem very unlikely. However, by looking at planets andtheir moons, we can see from their surfaces that many collisions have occurred since thecreation of the solar system, 4 billion years ago. A recent collision between two man-madecommunication satellites in Earth orbit notified us about the possibility of satellite collisions,even while there are only about 900 active satellites in the vast space around Earth.
Craters on planets and moons, e.g. Mercury and the Moon, are the result of highvelocity collisions with meteoroids, asteroids and comets. The surface of Earth was, andstill is, bombarded with the same objects. Most craters are not visible any more due to thedynamics of Earth’s surface, which removes evidence of impacts. There are, nevertheless,a few large craters on Earth that indicate that we were and still are at risk of high energycollisions with asteroids.
The largest recognizable crater on Earth is the Vredefort crater in South Africa witha diameter of 300 km, created 2 billion years ago. A more recent and smaller (1.2 km indiameter) crater is the Barringer crater in Arizona (USA), created 50,000 years ago. Someasteroids are predicted to pass Earth at very close distance in the coming decades. Oneasteroid that gained a lot of attention from media and the scientific community is Apophis,which is predicted to pass within geosynchronous orbit in 2029 and maybe again in 2036 [2].
The number of active satellites in Earth orbit increased every year since the first satellite,Sputnik 1, was launched in Earth orbit by the Soviet Union in 1957. Most satellite launchesdo not only bring a satellite into orbit, but also leave part of the rocket in orbit aroundEarth. At the same time, objects in low Earth orbits do lose energy due to atmosphericdrag and burn up in the lower and denser atmosphere after a few months to years. Objectsin higher orbits, however, will stay there for hundreds of years or longer.
Most satellites are not removed from orbit at the end of their operational life and areleft in orbit as inactive satellites; they become space debris. Space debris is all non-activematerial in Earth orbit. Some satellites or rocket engine components explode or break down,and create more and smaller space debris. This space debris can collide with active satellites,manned missions or other space debris, and causes satellite damage and even more spacedebris.
This chapter gives an overview of the causes and probabilities of collisions in space. Thefocus is on collisions in Earth orbit, but collisions with Earth are also discussed. The objectsthat orbit Earth and may cause collisions are discussed in Section 2.1. The history, futureand effects of collisions are discussed in Section 2.2. The chapter ends with a discussionabout collision avoidance methods in Section 2.3.
3

2.1. Objects in Space Chapter 2. Collisions in Space
Communications 62%Earth Science 14%
Navigation 8%
Reconnaissance 6%
Space Science 6%
Technology Development 4%Other/Unknown 1%
LEO 49%
GEO 40%
MEO 6%Elliptical 4%
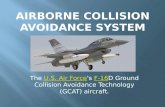
Figure 2.1: Left: Active satellite orbit type pie chart. Right: Active satellite type piechart. Data source: Union of Concerned Scientists [3].
2.1 Objects in Space
We distinguish three types of objects that orbit Earth: active satellites, manned vehicles,and artificial and natural space debris. There are also three types of objects in orbit aroundthe Sun that may collide with Earth or Earth’s satellites; asteroids, comets and meteoroids.A few spacecraft orbit the Sun as well, but they can be seen as asteroids and will not betreated separately in this report.
The following subsections give some details about numbers, size and mass of the namedobjects in space that may cause a collision with Earth, manned missions or active satellites.
2.1.1 Active Satellites
According to the Union of Concerned Scientists (UCS) satellite database [3], 905 active satel-lites are orbiting Earth as of January 2009, supporting a wide range of scientific, commercialand military purposes. The first satellite, Sputnik 1, was launched by the Soviet Union in1957. Over 4,500 additional launches have taken place since the launch of Sputnik. Mostsatellites are not active any more and have completely burned in the atmosphere, crashedon Earth or are still orbiting Earth as a form of space debris.
The 905 cataloged satellites have an average mass of 2,050 kg. 49% have a Low EarthOrbit (LEO), they orbit at an altitude between 0 and 2,000 km. LEO satellites are used forEarth observation, communication and military reconnaissance. 40% have a GeostationaryOrbit (GEO). GEO satellites are mainly used for communication. 6% have a Medium EarthOrbit (MEO). MEO satellites are mainly used for global navigation (GPS, Glonass, Galileo)and generally have an altitude around 20,000 km. And 4 % have a Highly Elliptical Orbit(HEO). HEO satellites are used for communication, they can be designed to stay above apoint on Earth for a large part of one orbital period, and for science missions. Figure 2.1shows pie graphs of the orbit type and purpose of satellites currently in orbit. [3]
Most satellites have almost circular orbits and can be found in specific altitude regions.This causes the collision probability to be higher in these regions of space.
The launch rate of new satellites peaked during the space race between the USA and theSoviet Union, 1957-1975. Although the launch rate declined somewhat after the space race,it did not continue to decline. An average of 61 satellites were launched every year over the
4

2.1. Objects in Space Chapter 2. Collisions in Space
USA 432
Russia 90
China (PR) 51
Multinational 48
Japan 36
United Kingdom 21
India 19Germany 15Canada 15
Luxembourg 14ESA 11
Other 153
Com mercial 42%
Governm ent 25%
Military 24%
Civil 6%Other 2%
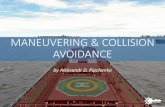
Figure 2.2: Left: Satellite distribution per country. Right: Satellite owner distribution.Data source: Union of Concerned Scientists [3].
past 10 years [3]. The distribution of satellites per country is shown in Figure 2.1.The number of active satellites in Earth orbit depends on the launch rate and the lifetime
of satellites. The lifetime of satellites may slightly increase due to improved and maturedtechnology, but is probably not going to change very much in the coming 10-50 years. Thenumber of new satellites mainly depends on the cost of launch and the demand for science,commercial and military satellites.
The cost of launch is dropping steadily, although no great breakthroughs in launchershave yet made space accessible for ordinary people. The launch price per kg to LEO isbetween 3,000 and 15,000 USD. While the average satellite is rather heavy, the launch ofmuch smaller and lighter satellites has gained popularity in recent years. An example are thestudent satellites launched by India’s PSLV launcher. These 1 kg, 1000 cm3 mini-satellitesare launched together in one rocket.
Sensors and electronics continue to decrease in size while performance is often increased.This, combined with the relatively cheap launch, makes satellites possible for smaller groupsof people or communities like students, space enthusiasts, earth scientists and other ama-teur or professional scientist. Once electronics become even smaller and lighter and launchbecomes cheaper and cheaper, an increase in launch of small satellites can be expected.However, to create a true revolution in satellite launch rate, the cost has to drop to a fewhundred dollars per kg.
2.1.2 Manned Missions
Only 4 years after the launch of the first satellite, the Soviet Union brought the first humanin Earth orbit in 1961. The USA followed only a year later. Humans have been in spaceevery year since 1961. The first man set foot on the Moon in 1969 and the Soviet Unionlaunched the first Space Station, the Salyut 1, in 1971. The USA followed with Skylab in1973. China became the third country that put a human in space in 2003. India, Japan andEurope (ESA) have plans to develop their own facilities to train, launch and keep humansin space.
All humans who went to space were part of a governmental prestige or science mission,but this is likely to change in the coming decade. Commercial space tourism spacecraft arein development by several companies. [4]
5

2.1. Objects in Space Chapter 2. Collisions in Space
196162
6364
6566
6768
6970
7172
7374
7576
7778
7980
8182
8384
8586
8788
8990
9192
9394
9596
9798
992000
0
10
20
30
40
50
60
70
2
53 3
810
1
7
23
5
13
6
13
6
11
6 6
10
4
13
10
16
25
37
63
9 8
19
27
3941
59
47
5048 48
58
39
22
37
year
num
be
r o
f hu
man
s in
sp
ace
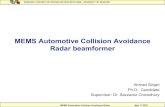
Figure 2.3: Number of humans in space since the launch of the first satellite. Data source:Verger et al [4].
Prestige, Science and Technology Missions
The first efforts to put man in space were prestige projects in a space race between the USAand the Soviet Union. Later, manned space flight focused more on science and technology.The USA had only one space station before the International Space Station (ISS) whileSoviet Union had 8 different space stations; Salyut 1-7 and Mir. The USA, however, has thereusable Space Shuttle, which it often uses for short manned space flights. The only spacestation currently in orbit is the ISS, which is used by many nation for scientific research.The ISS is not yet finished and was only able to house 3 crew members until May 2009, afterwhich 6 crew members permanently work in the ISS.
Humans have almost permanently been in space since the launch of the Mir, althoughalways in small numbers. Different countries have plans for human science and technologymissions in Earth orbit, on the Moon or even Mars. There is no reason to expect a greatincrease in the number of prestige, science and technology missions. If an increase of humansin space would happen, it will probably be the result of space tourism.
Space Tourism
Only 6 people have made paid space flights, all of them with the Soyuz spacecraft to the ISS.They paid over $20 million for their 10 day visit to the ISS. Although this can be seen asspace tourism, it is not supported by a commercial launchers, spacecraft and space stationand requires long and extensive training and actual work in the ISS. However, there are fullycommercial launchers, spacecraft and space stations in development. The first space tourismwill be short trips straight up to a high altitude and down again, orbital flights require much
6

2.1. Objects in Space Chapter 2. Collisions in Space
Figure 2.4: Space Stations. Top left: Salyut 7. Bottom left: Mir. Top right: Skylab.Bottom right: the International Space Station. Image source: WikimediaCommons [5].
7

2.1. Objects in Space Chapter 2. Collisions in Space
more propellant and a way to slow down during re-entry, which is more difficult. [6]
The Ansari X Prize, started in 1996, can be seen as the unofficial start of the privatespace tourism industry. ”The Ansari X Prize was a space competition in which the XPRIZE Foundation offered a $10 million prize for the first non-government organization tolaunch a reusable manned spacecraft into space twice within two weeks. The prize was wonon October 4, 2004, by the Tier One, using the experimental spaceplane SpaceShipOne.$10 million was awarded to the winner, but more than $100 million was invested in newtechnologies in pursuit of the prize.” [7]
SpaceShipTwo is a suborbital spacecraft under development and based on SpaceShipOne.It will bring 2 pilots and 6 passengers to 110 km and then directly back to Earth. The first100 tickets are sold for $200,000, but prices are predicted to drop to $20,000 after a fewsuccessful years. According to Virgin Galactic, the owner of SpaceShipOne, more than65,000 people have registered their interest and 200 seats were already reserved by makinga payment deposit in 2006. EADS Astrium in Europe [8], XCOR Aerospace [9] and othercompanies are developing similar suborbital services and will compete with SpaceShipTwoin the coming decade.
Orbital flights require more complex, expensive and larger launchers and spacecraft, butare the next logical step after suborbital space tourism. SpaceX is a private space companywhich develops their own rockets for orbital payloads. Their largest rocket, the Falcon 9,is scheduled to launch in 2009 and can bring between 9,900 kg and 27,500 kg to LEO fora price starting at $27 million [10]. A possible destination for a manned capsule launchedby the Falcon 9, is a space hotel in development by Bigelow Aerospace. Two prototypeinflatable space hotels, Genesis I and II [11], are already orbiting Earth.
These examples show that serious efforts and progress is made to make space tourismreality. Initially, space tourism will be expensive, but scaling, competition and mass produc-tion will likely make space tourism cheaper if there is a demand for these expensive flights.The high demand for expensive suborbital flights shows a promising demand for orbital spacevacations. High demand and recent developments suggest that the space tourism industrymay experience rapid evolution in the coming decades. While we cannot predict the future,it is certain that the safety of launch, re-entry and stay in space will be very important tokeep demand up.
Collision of a space hotel with space debris, active satellites or other hotels will not onlykill people, but will also be a blow for space tourism and the private space industry. Ademand for a collision avoidance system will therefore not only come from public demandfor safety and governmental regulations, but also from the private space industry itself.
As a drawback, the private space race will create a lot of new space debris. Space tourismgreatly increases the number of launches and will therefore also create more space debriscoming from launch vehicles. Hotels and spacecraft need to be tested and will probably fail,explode or break up during tests. To be competitive, private companies have to try newand cheaper technology.
2.1.3 Space Debris
Space debris, also called orbital debris, is human-generated and orbits Earth. All non-functional objects in Earth orbit are considered to be debris. ”This debris can be anythingfrom a piece of paint that has flaked off of a rocket or a spacecraft, to fragments of anexploded rocket upper stage, or an entire derelict spacecraft” [13].
8

2.1. Objects in Space Chapter 2. Collisions in Space
Figure 2.5: Space Tourism. Top left: SpaceShipOne. Bottom left: Falcon 9 launcher.Top right: EADS spaceplane (artistic render). Bottom right: Genesis II.Image source: Wikimedia Commons [12].
9

2.1. Objects in Space Chapter 2. Collisions in Space
Figure 2.6: Number of objects orbiting Earth versus time. Image source: Leleux [16].
Quantity, Orbit and Size
The largest catalog of space debris is compiled by the U.S. Space Surveillance Network (USSSN). ”As a rule of thumb, low altitude cataloged debris are assessed to be larger than 10cm in diameter. At higher altitudes objects less than 1 m in diameter may be undetectable.Individual object sensitivities may vary dramatically from this simple generalization.” [14].The US SSN catalog contained orbit element information of over 12,146 Earth orbitingobjects in 2008 [14] [15], most larger than 5-10 cm. Figure 2.6 shows the number of catalogeddebris from 1957 to 2000. Small particles come in higher numbers; there are approximately350,000 objects larger than 1 cm and 300 million particles larger than 1 mm [15].
Most debris is orbiting in LEO or at GEO as a result of fragmentation of satellites inthose orbits. The space debris density as function of altitude is shown in Figure 2.7. Thisgraph is made with a 2006 catalog and does not yet show a new peak at 890 km due tothe intentional destruction of a Fengyun 1C derelict weather spacecraft [14]. In addition,Figures 2.8 and 2.9 show the 3D distribution of cataloged space debris in Earth orbit. Thedebris and meteoroid flux as function of particle size in ISS orbit can be seen in Figure 2.10(meteoroids are discussed in Section 2.1.4).
Origin
4500 space missions have flown since 1957. Only 11 out of those 4500 missions are responsiblefor 32% of all cataloged space debris. Moreover, the source of 9 of these 11 fragmentationswere discarded rocket bodies that had operated as designed, but broke up later. The primaryfactors affecting the growth of the satellite population are the international space launchrate, satellite fragmentation and solar activity. [14]
Almost half of the cataloged satellite/debris population was determined to be fragmen-tation debris, as can be seen in Figure 2.11. A total of 194 satellite fragmentations and 51anomalous events have been identified since 1957. The primary cause of satellite breakupsare propulsion related events and collisions, mostly deliberate, with other objects in Earth
10

2.1. Objects in Space Chapter 2. Collisions in Space
Figure 2.7: Object density around Earth as function of altitude. Image source: Rossi [17].
11

2.1. Objects in Space Chapter 2. Collisions in Space
Figure 2.8: Space debris distribution around Earth as seen from a polar view. Outer bandis GEO. Image source: NASA [18].
12

2.1. Objects in Space Chapter 2. Collisions in Space
Figure 2.9: Space debris distribution around Earth as seen from a 3D perspective and aclose-up of LEO. Image source: NASA [18].
Figure 2.10: Debris and meteoroids flux against diameter in the ISS orbit according todifferent ESA and NASA models. Image source: Fukushige [15].
13

2.1. Objects in Space Chapter 2. Collisions in Space
breakup 48%
payloads 25%
rocket bodies 13%
mission related debris 12%unknown 2%
Figure 2.11: Causes of space debris. Data source: Johnson [14].
orbit.Payloads (the actual satellites) make up 25% of all large debris. It should be noted that
almost three out of every four payloads are no longer operational. The two other causes ofdebris are rocket bodies and mission related debris. Mission related debris results from theintentional release of objects, usually small numbers, during normal on-orbit operations. [14]
According to Rossi ”collisions are going to become the most important source of debrisin a not too distant future.” [17]
Evolution of Debris Clouds
Most space debris is the result of satellite fragmentation. When a satellite explodes orcollides, it creates a debris cloud of hundreds to thousands of fragments. These fragmentsdo not stay close together in orbit, as the simulation results in Figure 2.12 show; the debrisspreads out along the orbit and in the long run over a shell around Earth. This is the resultof different orbital velocities after fragmentation and collisions between fragments.
If the debris density in a certain orbit altitude region becomes large enough, those regionsof space can become supercritical. This means that collisions between objects are frequentenough to create more additional debris than atmospheric drag removes from the region.The new debris increase the collision rate, which in turn creates more debris. This chainreaction is a runaway reaction, similar to the reaction in nuclear weapons, above a certainsupercritical density. On the other hand, while the number of debris particles increases, thesize of the particles decreases. [19]
A study by NASA’s orbital debris program office in 2006, before the Chinese collisionstest, showed that parts of space have already reached supercritical debris densities. Forexample, in the heavily used altitude band from 900-1000 km, the number of debris fragmentslarger than 10 cm is expected to more than triple in the next 200 years, even if no additionalobjects are launched into that region. The same study estimates that the large debrispopulation in LEO will increase by 40% in 200 years, again assuming no new launches intoLEO. [19] [20] [21]
If the current intact satellite population is allowed to increase in the high density regions,the rate of collisions can increase significantly. In practice, after some period of time,
14

2.1. Objects in Space Chapter 2. Collisions in Space
Figure 2.12: Simulated evolution of debris larger than 10 cm, following the breakup of asatellite after collision. Image source: Wright, 2007 [19].
the intact population would be difficult to maintain because the region would become toohazardous to continue space operations in LEO. [20]
Future
Even if we stop launching new satellites, the orbital debris population in the most popularLEO regions will triple in 200 years. In reality, with the launch of new satellites, the situationwill be worse. Serious effort is required to prevent a fast runaway debris reaction that willmake LEO and GEO unusable for satellites and manned missions. Even launch to higheraltitudes may be in danger when there is too much debris in LEO.
Satellite fragmentation has to be minimized by reducing explosion risk, de-orbiting asatellite after operation and avoiding collisions with other objects. Even in the optimisticcase when new satellites do not add to the current debris population, debris and collisionswill increase and may never reach an equilibrium above 800 km. Moreover, the NASAbreakup model shows that the catastrophic breakup of a single satellite of 5-10 tons wouldroughly double the amount of debris larger than 1 mm currently in LEO [19].
Finally, a pessimistic scenario is a war in space; nations destroy their enemy’s commu-nication, navigation and reconnaissance satellites which creates enormous amounts of newdebris. Such a space war may make space almost inaccessible in a very short time and shouldbe avoided at all cost.
2.1.4 Asteroids, Comets and Meteoroids
Asteroids, Comets and Meteoroids are all small solar system bodies, smaller than planets, inorbit around the Sun. Some asteroids, comets and meteoroids have orbits that cross Earth’sorbit or come close to Earth, they are called Near-Earth objects [22]. It is possible that thesebodies collide with Earth or satellites in Earth orbit.
Asteroids
”Asteroids, sometimes called minor planets or planetoids, are small Solar System bodies inorbit around the Sun, especially in the inner Solar System; they are smaller than planets
15

2.1. Objects in Space Chapter 2. Collisions in Space
Figure 2.13: Lifetime of orbital debris for different LEO altitudes for (a) maximum solaractivity and (b) for minimum solar activity. Image source: Wright [19].
but larger than meteoroids.” [24]
Most asteroids orbit within the main asteroid belt between Mars and Jupiter, see Figure2.14. This belt contains an estimated 1.2-2 million asteroids larger than 1 km in diameterand millions of smaller ones [25]. The total mass of all asteroids is estimated to be 4% of themass of the Moon. Ceres is the largest asteroid and takes up 32% of all asteroid mass.
About 6000 asteroids larger than 50 m are known to have a near-Earth orbit, that crossesor comes close (< 0.3 AU) to Earth’s orbit. The largest is Ganymed with a diameter of 32km. There are more than 500-1000 near-Earth asteroids with a diameter larger than 1 km.
Near Earth asteroids survive for a few million years. They die by crashing into the Sun,Planets or are ejected from the solar system due to fly-bys of planets. New asteroids areconstantly moved into near-Earth orbits. It is believed that this happens through orbitalperturbation of Jupiter that have a resonating effect for some asteroids. It is not knownwhether the current near-Earth asteroid population is stable, increasing or decreasing. [26] [22]
Comets
”A comet is a Small Solar System Body (neither planets nor dwarf planets) that orbits theSun. Comet nuclei are themselves loose collections of ice, dust and small rocky particles,ranging from a few kilometers to tens of kilometers across. Comets are distinguished fromasteroids by the presence of a coma or tail.” [27]
Comets have a wide variety of different orbits that can be put in two groups; short (upto 200 years) and long period comets. Short period comets orbit in the Kuiper Belt, beyondNeptune. Long period comets are believed to come from the hypothetical Oort Cloud, 2,000-50,000 AU away from the Sun. They are sometimes inserted into the inner-planet region byperturbations, fly-by’s or collisions with foother comets.
Near-Earth comets are rare compared to near-Earth asteroids. Only 82 near-Earthcomets had been discovered as of December 2008. Most near-Earth comets end by fallinginto the Sun or other Planets. Collisions with comets did occur in the Solar System. Somecraters on the Moon, for example, are thought to be a result of comet impact. Cometsimpacts on Earth are a popular explanation for the origin of water on Earth. [26]
16

2.1. Objects in Space Chapter 2. Collisions in Space
Figure 2.14: Plot of all known asteroids for 2006 May 3, within 6 AU from the Sun. Thedense disk is the ”main belt” between Jupiter and Mars, and the two blobsto the bottom and left are the Trojans in the Langrage points of Jupiter.Image source: Murray and Dermott, 2000 [23]
17

2.2. Collisions in Earth Orbit Chapter 2. Collisions in Space
Meteoroids
”A meteoroid is defined by the International Astronomical Union as ”a solid object movingin interplanetary space, of a size considerably smaller than an asteroid and considerablylarger than an atom.” [28]
Meteoroids are small asteroids or comets with basically the same origin, compositionand orbits. They have a low mass but come high in numbers; millions of meteoroids arevaporized in Earth’s atmosphere each day. A typical encounter with Earth’s atmosphereoccurs at speeds of 15 km/s for asteroidal and 30 km/s for cometal meteoroids, but topspeeds reach 73 km/s.
At these speeds, they have enough kinetic energy per unit mass to completely vaporizewhen slowed down. Most of them vaporize in Earth’s atmosphere, but some make it to theground. Meteoroids that hit earth at hypervelocity (> 3000 m/s) are typically larger than30 m before encounter with Earth’s atmosphere and are rare. Although most meteoroidspose no threat to Earth’s surface, satellites operate at altitudes where meteoroids have notyet vaporized. [22] [26]
2.2 Collisions in Earth Orbit
Collisions in space have already happened and will happen again. Different types of collisionsare possible; debris or meteoroids can collide with other debris and with active satellites.Two satellites can collide as well. This Section gives a short overview of known historiccollisions, the result of a collision and the predicted future of collisions in space.
2.2.1 History of Collisions
Collisions in space are only identified if the generated debris cloud is large enough to betracked or when active satellites fail and investigation of the failure is possible. This meansthat collisions between small debris particles cannot be noticed or studied and that collisionswith satellites may cause satellite failure while we do not know this cause. Collisions canalso be the result of deliberate actions; testing debris cloud evolution or, more realistic, ananti-satellite weapon test or real space war.
Deliberate Collisions
The USA, Russia and China all successfully conducted anti satellite tests. Space weapondevelopment and testing has so far not been done by other space exploring nations.
The USA conducted two deliberate satellite collisions. One as an anti satellite weapontest and one supposed safety destruction of a satellite that would fall back to Earth. The antisatellite weapon test was conducted in 1985 by an ASM-135 anti satellite missile, launchedfrom a F-15A making a steep climb at Mach 0.9. The target, the 907 kg Solwind P78-1satellite flying at 555 km, was successfully destroyed [30]. The second deliberate collision bythe USA was the destruction of an American military spy satellite, named USA 193. Thissatellite had to be destroyed because it would return to Earth with dangerous hydrazinein its fuel tank and contained spy satellite technology. A SM-3 missile was fired from theTiconderoga class missile cruiser USS Lake Erie, and intercepted USA 193 about 247 kmabove the Pacific Ocean. The Department of Defense expressed a ”high degree of confidence”that the fuel tank was hit and destroyed. The satellite’s remnants were expected to burnup over the course of the next 40 days, with most of the satellite’s mass re-entering theatmosphere 24 to 48 hours after the missile strike.” [31]
18

2.2. Collisions in Earth Orbit Chapter 2. Collisions in Space
Figure 2.15: Left: Debris cloud just 5 minutes after the deliberate destruction of a defunctChinese weather satellite. Right: Chinese weather satellite debris cloud (inred) after 6 months. Image source: Kelso [29].
Russia conducted most anti satellite weapon tests, all during the cold war. Its antisatellite system is a co-orbital system in which a missile armed with conventional explosivesis launched into the same orbit as the target. It then makes a close approach on the target inone or two orbits and detonates its explosives to destroy the target with shrapnel fragmentsfrom the explosion. It is thought to be effective when detonated within a kilometer of thetarget. Russia performed 20 launches, seven interceptions and five actual detonations. Thetests were successful enough to make the system operational in 1972. How much debris wascreated and whether this debris is still in orbit is unknown. [32]
China conducted a direct-ascent anti satellite test against one of their own defunctweather satellites, the Fengyun 1C, in 2007. The test produced over 2000 pieces of trackabledebris and NASA Orbital Debris Program Office estimated it generated over 35,000 piecesof debris down to 1 cm in size. Figure 2.15 shows the evolution of the debris cloud createdby the Chinese satellite test. [29]
Accidental Collisions
Only a few large accidental collisions have been detected in space since the launch of Sputnik.One between two intact satellites, two between an operational satellite and large space debrisand one between two rocket bodies. Collisions between inactive satellites are hard to detectand can only be reconstructed from observed debris. Smaller collisions occur more often,but are also more difficult to detect. However, the Space Shuttle provides good evidence forsmaller collisions since it returns to Earth and can therefore be inspected.
The largest and most notable collision in Earth orbit was the collision between twointact satellites, the operational American communication satellite, Iridium 33, and theinactive Russian navigation satellite, Cosmos 2251, in 2009. Both satellites were completelydestroyed. The incident was observed by the U.S. SSN, above Siberia at an altitude of 790km, which later tracked two large clouds of debris. [33]
The operational French satellite Cerise was hit, at a relative velocity of 14.77 km/s bya fragment of about 10 cm2, coming from the 1986 explosion of an Ariane 1 rocket upper
19

2.2. Collisions in Earth Orbit Chapter 2. Collisions in Space
stage. The debris hit Cerise’s tether and left it tumbling and uncontrolled. [34] [17] [35]
In 2005, a 31 year old American rocket body was hit by a fragment from the third stageof a Chinese CZ-4 launch vehicle, which had exploded in March 2000. The impact happenedin a 885 km high circular orbit above the southern polar region. Three large debris pieceswere cataloged from the impact. [17]
Another collision in LEO was discovered while analysing old tracking data. A Russianinactive navigation satellite, Cosmos 1934, was hit by a piece of debris from the similarCosmos 926 in 1991. [17]
Collisions between operational spacecraft and small (< 1 cm) particles occur more oftensince there are much more small particles in orbit around Earth (space debris) and in orbitaround the Sun (meteoroids). For example, the windows in the Skylab Apollo CommandModules were found in 1974 to have been struck by small hypervelocity particles, the orbitalor meteoroid origin of some of the craters was not realized until 1980 [36].
The first Space Shuttle mission in 1983 confirmed the frequent impact of small particles,when three days into the mission an astronaut noticed a small pit in one of the windowsof the crew cabin. Spectrographic analysis of the residue left in this tiny pit revealed thepresence of titanium and aluminium, suggesting that the orbiter had been hit by a chip ofpaint that had flaked off of some unknown spacecraft or rocket body. This was one of the firstindications that orbital debris might pose a hazard to the Space Shuttle. Window impactshad increased dramatically by 1995 and the debris risk caused future Shuttle missions tochange.
Not only the windows were hit by small particles, but the entire Space Shuttle. In 1995and 1996, for example, significant impacts occurred on the Space Shuttle’s payload baydoor and rudder speed brakes, as well as on the tethered satellite pallet. Space Shuttleexternal surfaces have experienced impacts from particles on every shuttle mission. Theouter thermal panes of the crew cabin windows have sustained one or more impact pitsgreater than 0.25 mm in diameter on most flights. [13]
2.2.2 Collision Effects
Collisions in space are extremely energetic due to the high velocity of meteoroids, debrisand satellites. The velocity of objects in circular LEO is 7.8 km/s, the velocity at GEO is3.1 km/s and average mass of satellites is 2000 kg. Collisions between solid objects at suchhigh speeds are difficult to model and expensive to test. Little detailed collision informationis gathered from real high velocity collisions in space because one can only observe the largedebris pieces that result from the collision. However, high impact models are made andactual tests are done. These tests and models give us the best predictions of a high speedcollision.
An object striking a spacecraft at 10 km/s can cause several types of damage. Impactscan crater or perforate surfaces, create holes and cracks, or cause the back surfaces of wallsto fracture, sending material from the into the spacecraft’s internal structure. If an objectpenetrates the wall of a spacecraft, its fragments will travel into the spacecraft and depositover an area significantly larger than the impact hole, as can bee seen in Figure 2.16. [37] [13].
To highlight the danger posed by smaller particles, it should be kept in mind that theaverage impact velocity in LEO is about 8-10 km/s. This means that a 1 mm particle is ableto penetrate the reinforced carbon tiles on the Space Shuttle wing’s leading edges; this eventmay cause a loss of the Shuttle during re-entry. A particle of 5 mm is able to penetrate theShuttle cabin. [17] Shielding is possible against debris sizes of up to 1 cm. Shielding againstlarger debris is almost impossible and would require excessive shielding mass. [35]
20

2.2. Collisions in Earth Orbit Chapter 2. Collisions in Space
Figure 2.16: High speed images of an aluminium sphere (3.18 mm diameter) impacting a1 mm thick aluminium plate with a speed of 5.00 km/s. Image source: Chiet al [37].
According to the NASA model, a collision between a large object and a smaller one willbe catastrophic if the ratio of the impact kinetic energy of the smaller object to the massof the larger object is greater than 40,000 J/kg. That condition implies that an interceptorof 20 kg striking a large satellite at 7.5 km/s could completely fragment a satellite with amass up to about 14 tons. [19]
When the shuttle is in a 51.6 degree inclination 400 kilometer altitude orbit, NASA’smodel of the debris environment predicts an average collision velocity of 9 km/s for orbitaldebris with a diameter of 1 cm or more. [13].
Astronauts are also at risk from meteoroids and orbital debris during space walks. Themost vulnerable parts of their space suit are the soft areas; the arms, gloves and lower torso.The secondary oxygen pack of the space suite is made to provide astronauts with a 30 minutesupply of oxygen in case of a 4 mm puncture in the suit. This should be sufficient time foran injured astronaut to be assisted back to the pressurized spacecraft. NASA estimates thata 2 mm particle could cause a 4 mm hole, and a 0.1 mm particle or larger could cause apuncture. [13]
2.2.3 Future of Collisions
The number of future space collisions greatly depends on the number of satellite launches,collision mitigation policies and possible deliberate satellite destructions (anti satellite weaponstest or real attacks). Space is mainly used for scientific, communication, navigation and re-connaissance satellites today. An great increase in launches, spacecraft and satellites can beexpected when space tourism becomes affordable for a larger group of people.
When the current rate of launches is used for collision predictions, 60 catastrophic col-lisions will kill operational satellites in the next 100 years, according to Monte Carlo sim-ulations done by A. Rossi, 2006 [17] (see Figure 2.18). The collision rate will increase andwill continue to increase after 2100 for this scenario. New space debris from large collisionsis not taken into account in this model. Since one large collision can double the amountof space debris, this is a large inaccuracy in the model; the actual number of collisions willprobably be higher in the business-as-usual scenario.
The number of collisions in the coming century will greatly increase if space tourismbecomes reality and no good collision avoidance systems are active. This may not onlyendanger expensive satellites, but also human lives. Space tourism will start with sub-orbital
21

2.3. Collision Avoidance Systems Chapter 2. Collisions in Space
05000
1000015000
0500
10001500
200010
6
107
108
109
1010
1011
1012
Speed (m/s)Mass (kg)
Kin
etic
Ene
rgy
(J)
Figure 2.17: Kinetic energy as function of mass and speed.
flights in the coming years. These sub-orbital flights are also at collision risk, because they doenter space at altitudes where debris and active satellites orbit. Once orbital space tourismbecomes affordable for a few thousand Earth inhabitants, many shuttle launches to LEOspace hotels may greatly increase the debris created by launcher upper stages, dependingon their design. New and cheaper techniques have to be tested to be competitive in aglobal space tourism market, without strict regulations this will almost certainly lead to asignificant increase in space debris.
2.3 Collision Avoidance Systems
Collision Avoidance Systems (CAS) are systems that try to prevent collisions of operationalspacecraft in space. They generally consist of orbit determination, orbit prediction andmaneuver strategies. Orbit determination is needed to determine the location and velocityof objects in Earth orbit. With these position and velocity data, a prediction of futurepositions of the objects can be made by orbit prediction models. When a probable collisionis noticed from the prediction, a third system has to determine if a maneuver is possibleand which spacecraft will have to perform the maneuver. It should also come up with aoptimal avoidance maneuver. These three major components have to work together quickly.More accurate observations will be required when a probable collision is noticed, while themaneuver strategy will need the orbit prediction system to check whether the maneuver issafe and does not increase risk of future predictions. An indirect way of collision avoidanceis done by carefully planning satellite orbits and removing space debris.
CASs are needed to prevent loss of operational satellites, spacecraft and human lives, aswell as to prevent future space debris that will increase the future collision rate and may
22

2.3. Collision Avoidance Systems Chapter 2. Collisions in Space
Figure 2.18: Cumulative number catastrophic collisions for (sold line) a ”business-as-usual” and (dashed line) mitigation scenario, coming from Monte Carlo sim-ulations. Image source: Rossi [17].
even make space unusable due to a runaway collision reaction in parts of space that reachsupercritical density (Section 2.1.3).
Current CAS are almost only used for manned spaceflight with the Space Shuttle, and forthe ISS. No well integrated single collision avoidance system is currently available, however,collisions and collision avoidance gained more attention since the recent collision betweenCosmos and Iridium (Section 2.2.1).
The three main components of a CAS; orbit determination, collision prediction andmaneuver strategies; are discussed in the following subsections.
2.3.1 Orbit Determination
”Orbit determination of an artificial satellite requires as input measurements that are relatedto the satellite’s position or velocity. These data are collected by a satellite tracking systemthat measures the properties of electromagnetic wave propagation between the transmitterand the receiver. The transmitter as well as the receiver may either be a ground station ora satellite.” [38]
Position and velocity observations are made using radar, laser or Global PositioningSystem (GPS). Only operational satellites can use GPS for position determination, lasertracking requires retro reflectors on the satellite and radar or optical observations can beused for all objects large enough to be detected.
The US SSN uses 25 ground based radar and optical sensors to track space objects. Ithas the largest and most complete database of large space objects. Most objects with adiameter larger than 10 cm have been cataloged. Other space exploring nations like Japanand Europe also have tracking sensors and cooperate with the US SSN and use the US SSNcatalog to prevent collisions of their operational satellites. [39] [40]
23

2.3. Collision Avoidance Systems Chapter 2. Collisions in Space
The position of most operational satellites can be determined very accurately, in themeter or even centimeter range, if it has a laser reflector, GPS receiver or radar transponder.However, precise orbit determination of satellites or space debris without a specific orbitdetermination system on board is difficult.
NASA has requested that objects down to 1 cm have to be tracked as part of efforts toprotect the International Space Station. Should this be done, the catalog of man-made ob-jects in Earth orbit would grow from its current set of 10,000 objects to well over 100,000. [40]
”In addition to the detection sensitivity limits of the SSN, the quality of tracking data,atmospheric drag, and the effects of gravitational and solar radiation pressure perturbationsall combine to degrade the effectiveness of the conjunction assessment (CA) process.” [41]
2.3.2 Collision Prediction
Collision prediction of cataloged objects is based on the orbit prediction of tracked spaceobjects and calculating distances of closest approach or collision probability. Orbit predic-tions are made using force models and analytical or numerical integration of the satellitetrajectory. Analytical methods are fast, but are based on the simplified two body problemand cannot take other forces into account. Numerical integration is computationally moreintensive, but generates more accurate orbit predictions. The dynamics and integrationmethods for trajectory simulation are treated in Chapter 3.
Flux or collision probability models are used for smaller debris and meteoroids that arecurrently not cataloged. These models can only help during spacecraft structural and orbitdesign, and cannot predict specific collisions. Collision avoidance maneuvers are thereforenot performed for small debris and meteoroids. Both ESA and NASA have developedmeteoroid and small debris flux models; MASTER2005 and ORDEM2000 [15] (see Figure2.9).
Currently, no global collision prediction system that checks for possible collisions of alloperational satellites with tracked space debris or with other operational satellites. MannedSpace Shuttle and ISS missions do use the US SSN catalog and orbit prediction methodsto warn for possible collisions [41]. ESA also uses the US SSN catalog to check for possiblecollisions with some of its operational satellites like Envisat and ERS-2 [35].
The initial conditions (position and velocity) for the numerical or analytical orbit predic-tion come from orbit determination methods. Different initial conditions result in a differentpredicted trajectory, accurate orbit determination and uncertainty propagation are thereforeextremely important for the quality and usability of the predicted orbit.
A Monte Carlo (random brute force technique) simulation or covariance propagationcan be used to analyse the effects of uncertainties in the initial conditions. The SpaceShuttle used a Monte Carlo approach before 2001, but implemented a covariance propagationmethod, already in use by the ISS since 2001. The old method was based on an alert boxaround the Space Shuttle while the new method is based on collision probability. [16] [35]
2.3.3 Maneuver Strategies
Once an estimate of the collision probability is made, a decision has to be made aboutpossible maneuvers. The estimated probability risk may be too low for a maneuver. Butwhen the decision is made to make a Collision Avoidance Maneuver (CAM); an efficient,effective and safe maneuver has to be designed and performed by the spacecraft.
24

2.3. Collision Avoidance Systems Chapter 2. Collisions in Space
Figure 2.19: Velocity increment required to lower collision probability below 1 per millionfor a GEO satellite. Image source: Ailor [42].
Satellites
Not all satellites have a propulsion system to perform CAM, for example, the Hubble SpaceTelescope, hundreds of Russian Parus and Tsikada navigation and Strella communicationssatellites, and virtually all the new small satellites (minisats, microsats, nanosats and pi-cosats) [41]. Most satellites, however, have a propulsion system for small orbit correctionsthat could also perform CAM.
Only a few science satellites actually try to prevent collisions by using the US SSN cat-alog to perform collision predictions [35]. The operators of the Iridium constellation said,after the fatal collision of one of the communication satellites, that there are hundreds ofclose approaches each day and that it’s not worth making maneuvers based on the uncertaincollision predictions. Communication constellation satellites are less expensive and often re-dundant, this in contrast with expensive single science satellites for which collision avoidanceis of higher priority.
CAM are most fuel efficient when performed long before a possible collision, as can beseen in Figure 2.19. The sinusoidal shape of the graph is the result of the effect of a thrustforce on the orbit. An impulsive force at one point will cause the largest differences inthe original orbit at 180 degrees from the propulsion position. Since GEO satellites have aperiod of one day, the maneuver has the largest effect 0.5 (or 1.5, 2.5, etc.) days in advance.
A collision maneuver at least 1.5 days before collision is ideal from a fuel perspective.The accuracy of the observation and prediction can, however, be increased when closer totime of collision. A higher accuracy may mean that a maneuver is not required any more,which also saves fuel. In practice it is therefore better to wait for more accurate observationsand predictions and maneuver only a few hours before a possible collision. [42]
Maneuvers will generally be performed by a small thrust in the along track direction,because it is the most efficient way to change the orbit enough to avoid collision.
The current collision avoidance systems were build and are mainly used for mannedmissions (Space Shuttle and ISS). Both the Space Shuttle and ISS have made CAM in the
25

2.3. Collision Avoidance Systems Chapter 2. Collisions in Space
past and will do so in the future. Normal satellites will perform avoidance maneuvers in thefuture when more accurate collision prediction systems are available or when collision riskbecomes higher due to more objects in space.
Manned Missions
Current CAM are designed to prevent collisions with the ISS and Space Shuttle. It isdifficult to place a monetary value on human life, but even if we do not take the loss of lifeinto account, it is very important for future manned missions that no accidents with humansoccur in space, and notably for two reasons. First, the general public (the taxpayer whofinances science missions) does not allow frequent casualties, even while astronauts know therisk and are willing to take that risk. Second, it is important for commercial space tourismto have a reliable and safe record.
During realtime Shuttle operations, U.S. Space Command (USSPACECOM) screens themost current satellite catalog every 8 hours to determine if there may be a close approachbetween any object and the Shuttle within the following 36 hours [16]. In addition, launchersin the United States are currently required to assure that their launch will not get too closeto the Space Shuttle and International Space Station [40].
The ISS program requires the space station to conduct a CAM whenever the estimatedprobability of collision exceeds 1 in 10000, unless such a maneuver would impact primarymissions or payload objectives. Whenever the estimated probability of collision exceeds 1in 1000 an avoidance burn is performed unless it would result in Shuttle re-flight, hardwaredamage, additional space walks or additional risk for crew or vehicle. Typically, the ISSconducts a CAM once or twice a year. [41] [16]
2.3.4 Space Debris Removal
Besides avoiding collisions with space debris, we can also remove the space debris from space.This means that the space debris has to be tracked and then vaporized (in the atmosphereor by active heating). There is currently no technically feasible and economically viablemethod that can remove a large part of the debris [43] [41]. A few options that have beenresearched for feasibility are ground and space based laser, tether drag, tether catch, largefoamy balls and micro-satellites.
A ground based laser can change the trajectory of space debris by hitting the debris withthe laser. This laser has to be very powerful, because of the great distance and atmosphericinterference. Monroe calculated in 1993 that to de-orbit 1 kg debris from 500 km altitude,one needs a 5 MW reactor-pumped laser (RPL) with a 10 m diameter beam director andadaptive optics [44].
Space based lasers do not need to be as massive as ground based lasers, because theycan get closer to their target and do not need to penetrate an atmosphere. Space basedlasers, however, need to be low mass and low power. Small debris, 100 g, can be completelyvaporized from a distance of 70 km with a 100 kW pulsed laser. Larger debris can bedeflected. [45]
Tethers can be attached to debris and inactive satellites to generate electrodynamic drag.This drag lowers the orbit and ensures that the debris is burned in the atmosphere. A specialspacecraft will need to rendez-vous with the debris to attach the tether. The tether itself isa few kilometers long and causes a temporarily increase probability of collision, especiallywith other tethered systems. [46] [47]
A tether can also be used to power a small satellite that gathers debris and brings it,propelled by an ion engine, to a lower orbit where aerodynamic drag lowers the orbit even
26

2.3. Collision Avoidance Systems Chapter 2. Collisions in Space
further until it vaporizes in Earth’s atmosphere [48]. This concept can also use the tether toactually grab the debris, so that it does not need very large orbit changes to get close to thedebris [41].
JAXA studied the concept of a micro-satellite that acts as a vacuum cleaner in space.Small satellites fly an efficient route to gather debris, which is then brought to a lower orhigher orbit [49].
Other less feasible concepts include large foamy balls, up to 2 km across, which woulddecelerate small particles enough when they travel through the ball so that they fall backto Earth when they exit the ball. The problem with the ball is that the ball itself will easilyfall back to Earth and will also collide with active satellites. [43]
27

Chapter 3
Astrodynamics
Astrodynamics (or Celestial Mechanics) is the application of Newtonian mechanics to themotion of celestial bodies (i.e. satellites and planets) under the force of gravity and possibleperturbing forces.
To model the trajectory of a celestial body, we have to know the forces and direction ofthese forces that act on the satellite at every position along the trajectory. With the useof Newton’s laws we can model the trajectory with differential equations; the equations ofmotion. For efficient and accurate simulation and general analysis, different coordinate sets,reference frames and equations of motion have to be used. All force models and equationsof motion required to model a satellite orbiting a planet (or a planet orbiting the Sun) aregiven in this chapter. Chapter 5 gives the methods to solve the equations of motion.
This chapter is, when not specified, based on the books on astrodynamics by Wakker [50]
and Battin [51]. Section 3.1 describes the dynamics of n-bodies under the influence of theirmutual gravitational attraction. Section 3.2 the commonly used reference frames and thetransformations between reference frames and coordinate sets. Section 3.3 the perturbingforces that may act on an orbiting body. Section 3.4 methods that analyse and incorporatethe perturbing forces in the 2-body problem, this section is of particular interest to theinterval integration methods in Chapter 6. At last, Section 3.5 discusses the uncertaintiesin the models used in this chapter.
3.1 N-body Problem
The n-body problem is the problem of finding the motion of n point masses under theirmutual attraction. The oldest n-body problem arose from the attempts to predict the motionof the planets around the Sun. It is the problem of the motion of radially symmetrical bodieswith mutual gravitational attraction; every body exerts a force on the other bodies, in thedirection of the line between the bodies and with a size proportional to the product of themasses of the bodies and inversely proportional to the square root of the distance betweenthe bodies.
3.1.1 General Equations of Motion
Equations of motion are the differential equations that describe the behaviour of a systemas a function of time. The equations of motion of the n-body problem are the differentialequations that describe the motion of n mutual attracting bodies. These equations of motion
28

3.1. N-body Problem Chapter 3. Astrodynamics
Figure 3.1: Position vectors in the n-body problem with respect to an inertial referenceframe with origin O. Image based on: Wakker [50].
are the result of a combination of Newton’s law of universal gravitation and Newton’s lawsof motion.
Newton’s laws of motion are three physical laws that form the basis of classical mechanics.The first law states that objects only change velocity with respect to an inertial referenceframe if an external force is acting on it. The second law states that the net force, F, on abody is proportional to the time rate of change of its linear momentum, mv,
F =d(mv)dt
(3.1)
or more commonly known (for constant mass) as,
F = ma (3.2)
And Newton’s third law states that for every force there is an opposite and equal reactionforce; ”action is reaction”. Newton’s laws define the motion of a particle in an inertialreference frame in case the size and direction of the net force on the particle are known.In the case of the gravitational n-body problem, the direction and size of the gravitationalforces are given by Newton’s law of universal gravitation. For the force of body 1 on body2 we have,
F12 = −Gm1m2
r312
r12 (3.3)
where G is the universal gravitation constant, mi the mass of body i, rij the position vectorfrom body i to body j and rij the magnitude of the position vector rij .
Assuming that the body’s masses stay constant and usingd2rdt2
=dvdt
= a, Newton’s law
of universal gravitation (3.3) and Newton’s second law of motion (3.1), the motion of body
29

3.1. N-body Problem Chapter 3. Astrodynamics
Figure 3.2: Position vectors for the relative motion of body j with respect to the non-inertial reference frame with origin at body k. O is the origin of the inertialreference frame. Image based on: Wakker [50]
.
2 under the attraction of body 1, with respect to an inertial reference frame, can be writtenas,
m2d2r2
dt2= −Gm1m2
r312
r12 (3.4)
where the position vectors ri and rij are defined as in Figure 3.2.The force exerted on body i by all other n− 1 bodies, is the sum of the individual forces
of all bodies on body i. The equations of motion of body i, for the general n-body problem,can thus be written as,
mid2ridt2
=∗∑j
Gmimj
r3ij
rij (3.5)
where ∗ indicates that the summation is taken from j = 1 to j = n, but excluding j = isince body i does not exert a force on itself.
3.1.2 Relative Equations of Motion
The previous subsection derived the equations of motion with respect to an inertial referenceframe. In practice, however, one is often more interested in the motion of a body with respectto another body. Examples are the motion of the Moon or an artificial satellite orbitingEarth. The equations of motion of bodies n relative to body k can be directly derived fromthe general equations of motion (3.5) by a translation of the coordinate origin to the centerof body k. This new origin does therefore not rotate with respect to the old inertial referenceframe. The derivation can be found in literature, see for example [50] and [38]. The resulting
30

3.1. N-body Problem Chapter 3. Astrodynamics
equations of motion of body i relative to body k are,
d2ridt2
= −G (mi +mk)r3i
ri +G
∗∑j
mj
(rj − rir3ij
− rjr3j
)(3.6)
3.1.3 Constants of Motion
The gravitational n-body problem has some properties that are constant. These constantsare called ”integrals of motion” or ”constants of motion” and can be used for orbit analysis,to estimate errors in numerical methods and as orbital elements in a method called variationof parameters (see Section 3.4.2) or Unified State Model (see Chapter 4).
There are six integrals of motion with relation to the center of mass (velocity and posi-tion), three for the components of the total angular momentum and one for the total energyof the system. Other constants of motion depending on these constants can, of course, bedefined, which may be useful for numerical integration.
Center of Mass
The position of the center of mass, with respect to an inertial reference frame, of the systemis given by,
rcm =∑imiri∑imi
(3.7)
Assuming no external forces on the system, the acceleration of the center of mass is zero.Combining this with the equations of motion of the system and integrating twice yields thefollowing integration constants for the velocity and initial position of the center of mass,
d(xcm)dt
= a1d(ycm)dt
= a2d(zcm)dt
= a3 (3.8)
xcm = a1t+ b1 ycm = a2t+ b2 zcm = a3t+ b3 (3.9)
Total Angular Momentum
The total angular momentum is defined by,
H =∑i
miri ×dridt
(3.10)
The three components of H are three integrals of motion,
Hx =∑i
mi(yizi − ziyi) = c1 (3.11)
Hy =∑i
mi(zixi − xizi) = c2 (3.12)
Hz =∑i
mi(xiyi − yixi) = c3 (3.13)
It should be noted that these constants are not constant when external forces are exertedon the system, like drag or radiation pressure.
31

3.1. N-body Problem Chapter 3. Astrodynamics
Energy
An energy integral for the system can be derived from the equations of motion (3.5),
∑i
12miV
2i −
12G∑i
∗∑i
mimj
rij(3.14)
where the left term is the total kinetic energy of the system and the right term the totalpotential energy,
Ekin + Epot = Etotal (3.15)
3.1.4 Solutions
While the formulation of the n-body problem is rather simple, solving the non-linear differ-ential equations of a general n-body problem, (3.5) is difficult. The two body problem canbe solved analytically, but for three and more bodies the motion becomes seemingly chaoticand no general analytical solutions exist.
A new way to solve the equations of motion arose with the invention of the computerin the 20th century: numerical integration. Some basic numerical methods were alreadydeveloped and used by human calculators, but the computer immensely increased the numberof possible computations and opened a whole new field of methods and applications ofnumerical integration. All problems that involve more than two bodies, or other forces,cannot be solved exactly in an analytical way.
Analytical
Many mathematicians and physicists of the previous centuries, after Newton, have tried tosolve the n-body problem. The focus on the n-body problem triggered many new mathe-matical studies, methods and theories.
Euler, Laplace, Lagrange, Jacobi and Hamilton are a few historic mathematicians whoworked on this problem and by doing so invented new methods that are still used today ina large variety of science and engineering fields. Even Newton’s laws of motion are a resultof his effort to mathematically derive Kepler’s laws (the two body problem), which werepreviously only based on observations.
The two body problem, also called Kepler problem, can be solved analytically. Thisproblem can be separated into two independent one-body-problems about their commoncenter of mass (barycenter), which does not experience acceleration with respect to aninertial reference frame. The solution to this one-body-problem is a conical section, alsocalled Kepler orbit.
Six Kepler elements completely define the position of the body in three dimensionalspace. Two keplerian orbital elements define the shape and size of the ellipse:e, the eccentricitya, the semimajor axis
Three elements define the orientation of the ellipse:i, the inclinationΩ,the longitude of the ascending nodeω, and the argument of periapsis
The last element defines the position of the orbiting body along the ellipse as a function oftime:
32

3.1. N-body Problem Chapter 3. Astrodynamics
Figure 3.3: Definition of the eccentricity, e, and semi major axis, a. Image source:Wakker [50].
Figure 3.4: Definition of the Kepler elements i, ω, Ω and θ. Image source: Wakker [50].
θ (sometimes ν), the true anomaly or,E, the eccentric anomaly or,M , the mean anomaly or,
33

3.1. N-body Problem Chapter 3. Astrodynamics
Figure 3.5: Definition of the true anomaly, θ (sometimes ν), eccentric anomaly, E, andmean anomaly, M . Image source: Wakker [50].
τ , the time of pericenter passage.
M is a function of time, t and the time of pericenter passage, τ ,
M =√
µ
a3(τ − t) (3.16)
M and E are related by,M = E − e · sinE (3.17)
Figure 3.3 shows the definition of a and e, Figure 3.4 shows the definition of the threeelements (Euler angles) defining the orientation, and Figure 3.5 shows the definition of thetrue, eccentric and mean anomaly.
While the two body problem results in a simple geometric and repeating motion whichcan be solved analytically, this does not hold for the general (n ≥ 3)-body problem. Problemswith more than two bodies can generally not be solved analytically, although analyticalsolutions do exist for some specific geometries and mass distributions of the three bodies.
Because the Sun has very little influence on the position of satellites relative to Earth,the motion of satellites around Earth and Earth around the Sun, for example, can be ap-proximated by the superposition of two 2-body problems.
General solutions to the n ≥ 3-body problem can only be approximated using numericalmethods.
34

3.2. Reference Frames Chapter 3. Astrodynamics
Numerical
Numerical methods use truncated (finite) Taylor series expansions of the force function toapproximate the solution of differential equations. Numerical solutions are only an ap-proximation of the real solutions because it uses finite steps and finite digit numbers toapproximate the infinite and continuous differential operators and infinite digit numbers.
In addition, it provides only a single solution for some initial values and does not give asymbolic solution that provides insight into the problem. With the increasing computationpower it is, however, possible to get insight into the general behaviour of a system bygenerating solutions for many initial values; i.e. use brute force to generate data. A moredetailed discussion of numerical methods and their application to the n-body problem isgiven in Chapter 5.
3.2 Reference Frames
A reference frame is a ”realization of a reference system through accessible physical objectsalong with their coordinates” [52]. A reference system defines origin, axis and methods totransform between observables and reference data. Physical objects are benchmark objectsin the real world with precise coordinates for each.
This section presents two important reference frames; the International Celestial Refer-ence Frame (ICRF) and the Earth Centered Inertial Reference Frame (ECIRF). Transforma-tions between coordinate sets are given in Appendix A. Transformations between differentorigins and axis are discussed after the ICRF and ECIRF.
International Celestial Reference Frame
The International Celestial Reference Frame (ICRF) is an inertial reference frame with originand the barycenter of the Solar System. It is defined by the position of 212 extragalacticsources, mainly quasars. These sources are so far away that their is no significant angularmotion. It is the standard reference frame used to define the position of bodies orbiting theSun. [53] [54]
The origin is at the center of mass of the Solar System, the barycenter, which is generallyassumed to not experience acceleration (galactic rotation is insignificant). The epoch (timeof measurement) is usually 12h (Terrestrial Time) TT on 1 January 2000 (J2000.0). Thexy-plane is the plane of Earth’s orbit at the reference epoch (J2000.0). The x-axis out alongthe ascending node of the instantaneous plane of Earth’s orbit and Earth’s mean equator.And the z-axis perpendicular to the xy-plane in the directional (+ or -) sense of Earth’snorth pole at the reference epoch.
JPL HORIZONS ephemeris provides high precision and accessible Cartesian coordinatesof all major solar system bodies. Their reference frame is only slightly different from theICRF, which is more precise. [55]
Earth Centered Inertial Reference Frame
Earth-Centered Inertial Reference Frames (ECIRF) are a group of non rotating coordinateframes with their origins at the center of mass of the Earth. ECIRF frames are called inertialin contrast to the Earth-centered, Earth-fixed (ECEF) frames which rotate in inertial space.Although the ECIRF does not rotate, it is not a true inertial reference frame, because itaccelerates with Earth around the Sun.
35

3.2. Reference Frames Chapter 3. Astrodynamics
3.2.1 Transformations between Reference Frames
If we know the position of a body in one reference frame, it may be useful to transform thisto the position in a second reference frame. The same goes for the velocity and acceleration.
Figure 3.6: Motion of body P in the non-inertial reference frame xyz within the inertialreference frame XYZ. Source: Torok [56].
Figure 3.6 shows the position vectors of the xyz reference frame with respect to theinertial XYZ frame, and the position of body P with respect to the xyz and XYZ referenceframe. The xyz reference frame is only an inertial reference frame if the xyz is in puretranslation (linear motion) with respect to XYZ and the local unit vectors remain unchanged(no rotation).
In case the xyz rotates with velocity, ω, the position, velocity and acceleration of bodyP with respect to the XYZ frame are given by,
rP = rB + rrel (3.18)
vP = vB + (ω× rrel) + vrel (3.19)
aP = aB + (ω× rrel) + ω× (ω× rrel) + 2(ω× vrel) + arel (3.20)
Derivation of these equations can be found in Torok [56]. These equations can be reducedfor the ECIRF and ICRF because their local unit vector remains unchanged, ω = 0, so that(3.18-3.20) reduce to,
rP = rB + rrel (3.21)
vP = vB + vrel (3.22)
aP = aB + arel (3.23)
The ECIRF is a pseudo-inertial reference frame where the simplified equations above hold,because the local unit vectors in the ECIRF remain unchanged with respect to an inertialreference frame (for example, ICRF). The ECIRF rotates (accelerates) around the Sun dueto the gravitational attraction between the Earth and the Sun. It is therefore not an inertial
36

3.3. Perturbing Forces Chapter 3. Astrodynamics
reference frame; bodies on which no forces act do not move in straight lines in these referenceframes.
However, the gravitational acceleration of the Sun is almost equal for bodies close toEarth. Because all objects close to the origin of the ECIRF experience almost the samegravitational acceleration, bodies in the frame act as if it is almost inertial (pseudo-inertial).
The mathematical representation of the orientation (rotation) of a reference frame andtransformations between different representations is given in Section 4.1.2.
3.3 Perturbing Forces
The n-body problem is a simplified model of the motion of planets and satellites in a starsystem. It assumes radially-symmetrical rigid bodies and no other forces than gravity.However, in reality other forces than gravity act on planets and satellites. And bodies arenot completely rigid and radially-symmetrical. Moreover, the model is based on Newton’slaws of motion, while Einstein’s general relativity (unification of Newton’s law of motionand special relativity) is the more accurate model.
Forces other than gravitational forces are atmospheric drag, radiation pressure (photonsfrom the Sun or Planets) and electrical forces. Accurate force models can be made to modelthese forces, if enough information about the environment is available from observations.Figure 3.7 shows the size of the largest perturbing forces for different orbit altitudes.
Non-radially symmetrical planets cause the gravity vector to point away from the centerof mass of bodies. When the complete gravity field of a planet is known, a small correctingforce can be calculated. This slightly off center gravitational force only significantly affectsmasses close to the body, because the mass becomes more like a point mass for distantbodies (the off center angel becomes smaller).
Non-rigid bodies can exchange momentum. This exchange of momentum can be modelledfor, but is difficult and detailed information about the composition of a body is required.Luckily, this moment exchange is generally very small and only has a noticeable effect overa long time.
A correcting perturbing force can also be calculated for the relativistic effects. For longtime periods, long distances and high velocities this can may have a significant effect on theNewtonian orbit.
The gravitational force of other planets and the Sun on Earth satellites has a small effecton the motion of the satellite relative to Earth. This makes it possible to model an Earthsatellite orbit as a 2-body problem with the gravitational attraction of other celestial bodiesas perturbing forces.
A force model for a man-made thrust force is necessary to model rockets or satelliteswith propulsion systems. This size and direction of the thrust force follows from the rocketengine specifications and settings, and is generally known.
The next paragraphs give the force models for the perturbing forces on an Earth orbitingsatellite, these can be used in the perturbation methods presented in Section 3.4 and applyto all perturbed n-body systems. They describe and model the small perturbing forces thatcause a slight disturbance in the almost Keplerian orbits of satellites and planets.
3.3.1 Earth’s Gravity Field
The gravitational potential, or gravity field, outside a body with a radially symmetricalmass density distribution is equal to the potential of a point mass at the center of mass
37

3.3. Perturbing Forces Chapter 3. Astrodynamics
Figure 3.7: Order of magnitude of various perturbing forces for a satellite orbit versusorbit altitude. Image source: Montenbruck et al. [38]
38

3.3. Perturbing Forces Chapter 3. Astrodynamics
of the body with the same mass as the body. However, celestial bodies are not perfectlysymmetrical spheres and for some problems this has a significant effect on the orbit.
Orbiting bodies can assumed to be perfectly symmetrical density spheres and can thusbe modelled as point masses when high accuracy and precision are not essential or whendistances are large. This is, for example, the case for planets orbiting the Sun or for afirst-order approximation of Earth satellite trajectories.
For bodies orbiting at close distances to their main body, the real shape and densitydistribution of the main body can have a significant effect on the orbit. This is especiallytrue when the gravity field disturbance forces act on the satellite in a periodic way or in thesame direction, thereby creating a resonance which can yield large deviations over long timeperiods.
The gravitational potential of a body with arbitrary mass density distribution, at a pointoutside the body, can be modelled by,
U = −µr
(1−
∞∑n=2
Jn
(Rer
)nPn(sinφ)−
∞∑n=2
n∑m=1
Jn,m
(Rer
)nPn,m(sinφ)(cosm(Λ− Λn,m))
)(3.24)
where, for the Earth, r, φ,Λ are the spherical coordinates of the point that is consideredwith respect to the geocentric rotating reference frame, Re is the mean equatorial radius.The factors Jn,m and Λn,m are constants of the gravity field. Jn (m = 0) represents theinfluence of deviations in the mass density distribution in North-South direction, called zonalharmonics. And Jn,m the influence of mass distribution in the North-South and East-Westdirection, called tesseral (m 6= n) and sectorial harmonics (m = n).
The Jn,m and Λn,m coefficients up to order and degree 360 (EGM96) and 2159 (EGM2008)are determined from the orbit determination of Earth satellites and gravimeter (accelerom-eter) measurements. Digital tables for the EGM96 and EGM2008 coefficients can be foundon-line [57] [58].
The terms Pn(sinφ) and Pn,m(sinφ) are Legendre polynomials and Legendre functionsof the first kind, for which the following expressions hold,
x = sinφ (3.25)
P0(x) = 1 (3.26)
P1,0(x) = x (3.27)
Pn(x) =1
(−2)nn!dn
dxn(1− x2)n (3.28)
Pn,m(x) = (1− x2)m2dmPn(x)dxm
(3.29)
Legendre polynomials can be computed recursively for computational efficiency. A recursivemethod can be found in Balmino, 1991 [59].
The magnitude of the perturbing acceleration f can be found from,
f = −∇(U +
µ
r
)(3.30)
39

3.3. Perturbing Forces Chapter 3. Astrodynamics
When we consider only the J2 term, we may write in Cartesian variables,
f = −∇[
12µJ2
R2
r3
(3z2
r2− 1)]
(3.31)
fx = −32µJ2
R2
r5x
(1− 5
z2
r2
)(3.32)
fy = −32µJ2
R2
r5y
(1− 5
z2
r2
)(3.33)
fz = −32µJ2
R2
r5z
(3− 5
z2
r2
)(3.34)
3.3.2 Gravitational Attraction by other Celestial Bodies
The gravitational attraction by other celestial bodies follows from (3.6), where it is the lastterm,
Fbodies = G
∗∑j
mj
(rj − rir3ij
− rjr3j
)(3.35)
In case of an Earth orbiting satellite, the gravitational attraction from the Sun and theMoon have the largest influence of all disturbing bodies. Figure 3.7 gives an indication of therelative sizes of the disturbance forces of the Sun, Moon and other planets on the satellite.
3.3.3 Aerodynamic Forces
The Earth and some other planets have an atmosphere which may extend to high altitudesabove the surface. The atmosphere of Earth consists mostly of nitrogen and oxygen gas.Interaction (collisions) between the gas particles and a satellite cause a change of momentumof the satellite. This change of momentum (force) is called drag and is related to the numberof particle collisions and the speed of the collisions. In the macro world this means it isrelated to the density of the gas and velocity of the satellite with respect to the atmosphere.
The atmospheric density decreases with increasing altitude and can be assumed nonexistent at large distance, higher than 800 km for Earth. A very rough estimate of thedensity, at altitudes up to 100 km, is given by the exponential atmosphere model,
ρ = ρ0e−h/H0 (3.36)
where h is the altitude, ρ0 the density at sea level and H0 the density scale height, which is7.9 km at sea level.
For higher altitudes, where most satellites orbit, the MSIS-E-90 [60] atmospheric modelcan be used. This model is available on the world wide web and can generate a table ofdensities at different positions. A local polynomial fit of this table creates a continuousapproximation of the local densities.
The drag force can be modelled by the following equation,
Fdrag = −12CDρSVV (3.37)
40

3.3. Perturbing Forces Chapter 3. Astrodynamics
where CD is the drag coefficient of the satellite that has to be determined from experiment,a typical value is 2.3 [38]. ρ the density of the atmosphere, S the frontal surface area of thesatellite and V the velocity of the spacecraft with respect to the atmosphere.
The density of the atmosphere changes with position and time and is primarily a functionof altitude and temperature.
3.3.4 Radiation Pressure
Radiation pressure is the result of photons hitting the satellite. Radiation from the Sun,directly or reflected from Earth, is the main radiation pressure source for an Earth satellite.The radiation power directly from the Sun is almost constant, while the radiation reflectedfrom Earth depends on the reflectivity of the Earth’s surface in view of the satellite. Oneshould not forget that the radiation from the Sun and Earth in the shadow of Earth arecompletely different. These variations makes modelling of the radiation pressure rathercomplex.
ForThe radiation force can be modelled by,
Fsol = CRWS∗
c(3.38)
where CR is the reflectivity, between 0 and 1. W the power density of the incoming light, 1366W/m2 from the Sun. S∗ the effective surface area, and the speed of light c = 299, 792, 458m/s.
3.3.5 Electromagnetic Forces
An electromagnetic perturbing force acts on the satellite because the atmosphere at highaltitudes is ionized. This causes the satellite to become electrically charged; it obtains anegative potential with respect to its environment. The interaction between the chargedsatellite and Earth’s magnetic field causes a Lorenz force to act on the satellite. The Lorenzforce is expressed as,
Fem = qV×B (3.39)
where q is the electric charge of the satellite, B the magnetic induction of Earth’s magneticfield and V the velocity of the satellite.
The external magnetic field of Earth can be approximated by a dipole coinciding withthe Earth’s axis of rotation. This approximation yields the following magnetic potential,
Udip = g1R3
r2sinφ (3.40)
where g1 is a geomagnetic parameter, R the mean radius of Earth, r the magnitude of theradius vector and φ the latitude of the satellite.
The magnetic induction of this dipole potential field is given by,
B = −∇Udip (3.41)
The Lorenz force on the satellite can now be written as,
Fem = −(qg1R3) ·V×∇
(sinφr2
)(3.42)
41

3.3. Perturbing Forces Chapter 3. Astrodynamics
The order of the electromagnetic force is much smaller than, for example, the atmosphericdrag and gravity field perturbations. Its exact values are therefore not required for collisionavoidance and this force will be included in a force that encloses all small perturbation forcesand a uncertainty margin.
3.3.6 Relativistic Effects
Newton’s theory of gravity and motion were not able to fully explain the motion of all planetsin the solar system. Especially Mercury had a measurable different orbit than predicted byNewton’s theories. A more accurate model came in the form of Einstein’s general theoryof relativity, which unified his special theory of relativity with Newton’s law of universalgravity.
Using general relativity instead of Newton’s theories is much more complicated and notnecessary for most orbit predictions, since the perturbing acceleration due to relativisticeffects is in the order of 3 · 10−10 m/s2 for a typical Earth orbiting satellite. A first orderpost-Newtonian relativity correction is given by,
frel = − µr2
((4µ
c2r− V 2
c2
)er + 4
V 2
c2(er · ev)ev
)(3.43)
where er and ev are the unit position and velocity vector, c the speed of light and µ thestandard gravitational parameter of the main body.
3.3.7 Thrust
Most spacecraft have a propulsion system that exerts a force on the spacecraft, to changethe orbit, by expelling mass. This force is generally known for a specific propulsion systemfrom tests on Earth. Otherwise, this force can be modelled in terms of mass flow and specificimpulse,
Fthrust = g0mIsp (3.44)
where g0 is the gravitational acceleration at the Earth’s surface, Isp the specific impulse invacuum and m the mass flow of the propellant. Isp depends on the rocket engine used andis between 250 and 3,000 seconds. The specific impulse and mass flow are also known fromtests or theoretical predictions.
3.3.8 Enclosing Perturbing Forces
For Interval Integration discussed in Chapter 6, all possible values of the perturbing forceshave to be enclosed in an interval (a set defined by upper and lower bounds). Table 3.3.8gives intervals that enclose all possible perturbing forces. They are based on the typicalparameter values given in the previous subsections and are enlarged to make sure the forceis in the interval. While many of the perturbing forces act in known directions, the givenintervals can be used in all directions for simplicity, while making sure that all possibleperturbing forces are included.
The perturbing forces that are proportional to the satellite mass are given as acceleration,the other as force. More accurate, and thus smaller, interval enclosures can be obtained fora specific orbit with the parameter values and models presented in the previous subsections.
42

3.4. Perturbation Methods Chapter 3. Astrodynamics
Table 3.1: Interval enclosures of perturbing forces or acceleration for near circular orbitsbetween 200 km and 50,000 km above Earth’s surface. The intervals are enlargedto be sure to contain all possible forces. Real forces are most likely smaller anddepend on the orbit.
Force Type Acceleration Interval [km/s2]Drag S
m [−30, 30]Earth’s Gravity Field [−10−8, 10−8]Other Planets and Sun [−10−7, 10−7]Radiation Pressure S
m [−10−7, 10−7]Relativistic Effects [−10−9, 10−9]Other [−10−9, 10−9]
3.4 Perturbation Methods
The motion of a satellite with respect to a non-rotating Earth centred reference frame whenperturbing forces are taken into account can be described by,
d2rdt2
+µ
r3r = −∇R+ f (3.45)
where R is the disturbing potential that describes all perturbing forces that can be expressedas potential function, and f are all other perturbing accelerations.
Equation (3.45) cannot be solved analytically and has to be solved using analyticalapproximations, called general perturbation methods, or using numerical integration tech-niques, called special perturbation methods.
General perturbation methods symbolically expand the perturbing accelerations in trun-cated series that are integrated analytically. General perturbation methods are very fastonce the series expansion of the perturbing forces is known. The other main advantage ofgeneral perturbation methods is that it can reveal the source of perturbations from orbitaldata. The disadvantage is its low accuracy compared to special perturbation methods.
Special perturbation methods are all methods that use perturbing forces and numericalintegration methods to model the trajectory of a specific body. Three commonly used meth-ods are Cowell’s method, Encke’s method and the method of variation of orbital elements.
Cowell’s method is the simplest method that uses rectangular coordinates and numer-ically integrates all forces, main gravitational and perturbing. No use is made of the factthat analytical solutions of the unperturbed two body problem exist.
Both the method of Encke and the method of variation of orbital elements use an analyt-ically computed reference orbit. Only deviations from this orbit are integrated numerically.The method of variation of orbital elements is most advanced because it uses the almostconstant Kepler elements. However, Encke’s method is easier to implement because it usesthe orthogonal Cartesian coordinates.
While the method of variation of orbital elements is more computational efficient (ormore accurate for equal computation times), it is also more complex than Encke’s or Cowell’smethod. The increase in computational power and the need for non-astronomers, lackingspecialized knowledge, made the method of Encke and later Cowell most popular.
43

3.4. Perturbation Methods Chapter 3. Astrodynamics
3.4.1 Method of Encke
The Method of Encke, introduced by J.F. Encke in 1852, uses a reference orbit and onlynumerically integrates the deviations from this reference orbit. Any orbit can be used asreference orbit, but for a near two body problem a Kepler reference orbit is a logical choicebecause the unperturbed orbit is Keplerian. For the Kepler reference orbit we write,
d2ρ
dt2+µ
ρ3ρ = 0 (3.46)
where ρ is the position vector of the satellite if no perturbing forces would act on it. Atsome instant of time, the position and velocity of the real and reference satellite are setequal (the constant reference orbit is defined),
t = t0 (3.47)
r = ρ (3.48)
drdt
=dρ
dt(3.49)
For the deviation of the acutal trajectory from the reference orbit at time t, we write,
∆r = r− ρ (3.50)
By differentiating this relation twice with respect to time and substitution of (3.45) and(3.46) into , we obtain,
d2∆rdt2
= µ
(ρ
ρ3− rr3
)−∇R+ f (3.51)
The reference orbit, ρ, can be computed analytically, and the deviations, ∆r, from thisreference orbit numerically. The actual position and velocity follow from the addition of ρ
and ∆r, anddρ
dtand
d∆rdt
.
(3.51) can be rewritten in a better form for numerical computation,
d2∆rdt2
=µ
ρ3[(ρ+ ∆r)qf(q)−∆r]−∇R+ f (3.52)
where,
qf(q) =2q
1 + 2q
[1 +
11 + 2q +
√1 + 2q
](3.53)
and,
q =∆r · (ρ+ 1
2∆r)ρ2
(3.54)
3.4.2 Variation of Orbital Elements
The orbital elements a, e, i, Ω, ω en τ (see Section 3.1.4) are constants of motion for theunperturbed problem and completely determine the orbit of the body. For a certain positionand velocity of a body, one corresponding set of orbital elements can be determined, this isa fictitious momentary Kepler orbit; a Kepler orbit that corresponds with the instantaneousposition and velocity but does not stay constant due to perturbing forces. The fictitiousmomentary Keplerian orbit is therefore the orbit the body would follow if from that moment
44

3.4. Perturbation Methods Chapter 3. Astrodynamics
all perturbing forces become zero. Such an instantaneous Kepler orbit can be found atevery moment in time, therefore, one may consider the motion of a satellite as a continuoustransition between instantaneous orbits. This can also be seen as orbital elements thatcontinuously change with time.
The method of variation of orbital elements uses mathematical relations between thetime rate of change of the orbital elements and the perturbing forces. It consists of a setof six first-order differential equations for the variation of the ”osculating” orbital elements.These differential equations can be integrated, like the more common equations of motionin rectangular coordinates, to yield the orbital elements and thus the position and velocityat any moment in time.
The advantage of this method is that the change of orbital elements is small for smallperturbing forces, which makes it possible to use large time-steps in numerical integrationand decrease the integration errors described in Section 3.1.4 and 5.3. Another advantagemay be its use in interval (or verified) integration of satellite orbits (see Chapter 6), sincethe variations in the orbital elements are much smaller than the variations in Cartesiancoordinates.
Different sets of constants of motion (orbital elements) can be found and used in themethod of variation of orbital elements. Hybrid methods that use constants of motion andother convenient variables also exist. One such method is the Unified State Model which isdiscussed in detail in Chapter 4.
The classical differential equations for the Kepler elements are Lagrange’s PlanetaryEquations. These equations take only forces that can be described by a perturbing potentialR in account. More general equations are Gauss’ form of the planetary equations, whichcan take any force into account.
Lagrange’s Planetary Equations
J.L. Lagrange developed his method of variation of orbital elements in 1780. The equationsonly describe the change of the elements due to potential forces. This means that forces likedrag and radiation pressure cannot be applied in this method.
The derivation of the Lagrange’s Planetary Equations can be found in [50] and [51] and isnot discussed here. The six variational equations are,
da
dt= −2
a2
µ
∂R
∂τ(3.55)
de
dt= −a(1− e2)
µe
∂R
∂τ− 1e
√1− e2
µa
∂R
∂ω(3.56)
di
dt=
cot i√µa(1− e2)
∂R
∂ω− 1√
µa(1− e2) sin i∂R
∂Ω(3.57)
dω
dt=
1e
√1− e2
µa
∂R
∂e− cot i√
µa(1− e2)∂R
∂i(3.58)
dΩdt
=1√
µa(1− e2) sin i∂R
∂i(3.59)
dτ
dt= 2
a2
µ
∂R
∂a+a(1− e2)
µe
∂R
∂e(3.60)
45

3.4. Perturbation Methods Chapter 3. Astrodynamics
When the perturbing potential R is a known function of x, y, z, then the partial derivatives∂R
∂αican be determined from,
∂R
∂αi=∂R
∂x
∂x
∂αi+∂R
∂y
∂y
∂αi+∂R
∂z
∂z
∂αi(3.61)
The differential equations (3.60) can be solved numerically using this relation.It should be noted that it was never assumed that the perturbing forces were small in the
derivation of the variational equations. The equations are therefore generally valid althoughit loses its advantage over the simpler Cowell’s and Encke’s methods when perturbing forcesbecome comparable to the main gravitational force.
Gauss’ form of Lagrange’s Planetary Equations
J.C.F Gauss elaborated the partial derivatives in equations (3.61) in 1813 to include nonpotential forces. He wrote the differential equations in terms of the perturbing accelera-tions in the radial direction, as, perpendicular to the radius vector, an, and a componentperpendicular to the orbital plane, aw.
The resulting set of differential equations is called Gauss’ form of Lagrange’s PlanetaryEquations, a derivation can be found [51],
da
dt= 2
a2
õp
[fSe sin θ + fN
p
r
](3.62)
de
dt=√p
µ[fS sin θ + fN (cosE + cos θ)] (3.63)
di
dt= fW
rõp
cos(ω + θ) (3.64)
dω
dt= −
√p
u
[fW
r
pcot i sinu+
1e
(fS cos θ − fN
(1 +
r
p
)sin θ
)](3.65)
dΩdt
= fWr
õp sin i
sinu (3.66)
dM
dt= n− fS
[2r√µa− 1− e2
e
√a
µcos θ
]− fN
1− e2
e
√a
µ
(1 +
r
p
)sin θ (3.67)
where,
n =√
µ
a3(3.68)
M = n(t− tperigee) (3.69)
p = a(1− e2) (3.70)
r =p
1 + e cos θ(3.71)
These equations can be used to predict the perturbed orbit of a satellite around Earthor a planet around the Sun. It is valid for small and large perturbing forces and can takeall known forces on the orbiting body into account.
46

3.5. Uncertainties Chapter 3. Astrodynamics
3.4.3 Singularities
From the relations (3.55-3.60) and (3.62-3.67) we can see that problems arise in Langrange’sand Gauss’ form of the planetary equations if e→ 0 or sin i = 0 because e and sin i occur inthe denominator. This means that singularities occur in the variational equations for nearcircular or equatorial orbits.
These singularities are a result of the chosen coordinate set (Kepler elements) and arenot a physical phenomena. This problem can be explained by the fact that the argumentof perigee, ω, is not defined for circular orbits (e = 0) and the argument of perigee makesdiscontinuous jumps of 90 degree because the major and minor axis change or are not defined.For circular and equatorial orbits, the Kepler elements have to be replaced by a different setof elements to remove the singularity.
One common replacement in orbital elements for near-circular orbits is replacing e, ωand τ with the following elements,
l = e cosω m = e sinω χ = ω − nτ (3.72)
The resulting variational equations can be found in [50]. For the qualitative analysis of theinterval integration methods discussed in Chapter 6, these equations are not necessary sincethe methods can be analysis without using orbits with zero eccentricity and inclination.
A different set of orbital elements, called Unified State Variables, also remove this sin-gularity and is described in more detail in Chapter 4. These Unified State Variables aredefined by Altman in 1972, but have only been applied to once to a navigation problem [61].
3.5 Uncertainties
Very accurate orbit predictions can be made using the methods described in this Chapter.The predictions will, however, rarely correspond exactly with reality. This is due to trunca-tion and rounding errors of numerical integration methods, but also due to the models itselfand the uncertainty in the constants and parameters used in the models. Furthermore, theinitial position and velocity (initial values) are not precisely known and contain a certainuncertainty.
Truncation and rounding errors were already discussed in Section 3.1.4 (and in moredetail in Section 5.3). The other causes of uncertainties in the predictions are discussed inthe following subsections.
3.5.1 Physical Models
Physical models (or laws, or theories) try to predict a large field of phenomena in an accurateway. The fact that something is called a physical law, model or theory does not say anythingabout the ultimate truth. A scientific theory never claims to be 100% accurate and neverclaims to describe how the universe really works; it is only a model, even if it is accurate upto current measurement precision. [62]
Newton’s theories of motion and gravitation (1687) described a wide range of physicalphenomena; from an apple falling to the ground to galaxies orbiting other galaxies. It alsodid this with great accuracy. The existence, for example, of Neptune was predicted by themotion of Uranus, using Newton’s theories.
But at the same time, the orbit of Mercury showed slight perturbations that couldnot entirely be accounted for by Newton’s theory. Einstein’s General Theory of Relativity(1915) was the new theory of gravitation and was able to account for the complete motion of
47

3.5. Uncertainties Chapter 3. Astrodynamics
Mercury. It had long been believed that Newton had found the true nature of the universe,but Einstein showed that his theory was only a very accurate model of reality.
Although Einstein’s theory is accurate up to current measurement precision of dynamicson the large scale, it does not mean that Einstein’s theory is exactly right and it doesnot claim to be. Furthermore, Einstein’s General Theory of Relativity produces impossibleresults when applied to microscopic problems where gravity becomes as strong as the otherfundamental forces (the electromagnetic, strong nuclear and weak nuclear force); for examplein black holes and the big bang. This shows that Einstein’s more accurate theory is not aperfect model and should not be seen as the ultimate truth.
Nevertheless, Newton’s theory was accurate enough to land a man on the Moon andEinstein’s theory is more accurate and precise, on solar-system scales or larger, than we canmeasure. Newton’s theory is much easier to apply and is still used to predict orbits. A cor-rection for the General Relativity effects can be applied to correct for the small differencesbetween Newton and Einstein. When these corrections are applied, the uncertainties result-ing from the accuracy of the model, assuming exact physical constants and parameters, isinsignificant and not measurable. [63] [64]
3.5.2 Physical Constants
A physical constant is a quantity that is believed, or assumed, to be universal and constantin time. Physical constants can be seen as the scale or ratio of relations between physicalconcepts like mass and force. For example, the constant of gravitation, G in m3
kgs2 , in New-ton’s law of gravitation (3.3) can be seen to provide the scale of the relation between thegravitational force and the mass and distance of two bodies.
Physical constants can be defined exactly in the basic units when they define the size of,for example, a meter or a second. However, most constants are determined from physicalmeasurements. These measurements have a certain limited accuracy and precision and thephysical constants therefore also have a limited accuracy and precision. This means thatwhen we apply Newton’s law of gravitation, the precision of the gravitational constant,among others, limits the precision of our results.
The Newtonian constant of gravitation, G, and the speed of light, c are the only phys-ical constants used in the models described in this Chapter. The value of G is 6.67428 ·10−11m3kg−1s−2 with a standard uncertainty of 0.00067 · 10−11m3kg−1s−2 [65]. The stan-dard uncertainty is the estimated standard deviation of G, where the measurement uncer-tainty is approximately normal distributed. This implies that it is believed with an approxi-mate level of confidence of 68 % that G is greater than or equal to G − 0.00067 · 10−11,and is less than or equal to G + 0.00067 · 10−11, which is commonly written as G =6.67428 · 10−11 ± 0.00067 · 10−11m3kg−1s−2.
The speed of light, c, in ms−1 is exact (or defined) because it defines the size of onemeter. The speed of light is exactly 299, 792, 458ms−1.
3.5.3 Parameters
Besides physical constants, there are some parameters in the force models described inthis Chapter that are assumed to be constant or a function of the state variables, but areproblem specific and not universal. The physical parameters used in this Chapter are thedrag coefficient, CD; the effective surface area, S; the atmospheric density, ρ; the reflectivity,CR; the power density, W ; mean equatorial radius, Re; gravity factors, Jn, Jn,m and Λn,m;the electric charge, q; the geomagnetic potential, g1; the mass flow, m; and specific impulse,Isp.
48

3.5. Uncertainties Chapter 3. Astrodynamics
CD, CR and S depend on the orientation of the orbiting body with respect to its flightdirection. The values for a specific orientation can be measured very precisely on Earth, butare very uncertain for objects that cannot be measured on Earth. The uncertainty for theseparameters varies per object and should be defined for every specific object.
ρ, the atmospheric density, varies with altitude, position and time. The uncertainty inthe atmospheric density is the largest cause of uncertainties in orbit predictions of low earthorbits. Time of the day, the season and solar activity all cause a local change of atmospherictemperature which makes the atmosphere expand or contract. This causes large difference inlocal atmospheric densities at high altitudes and is difficult to model. Atmospheric densitymay vary with a factor 100 at altitudes above 300 km where solar activity has the greatestinfluence on the density.
W , the power density, from the Sun is almost constant and can be easily and accuratelymeasured. Solar radiation reflected from Earth depends on the surface of Earth in view ofthe satellite, but is also accurately known from measurements. The position of Eearth, Sunand satellite are required to determine whether the satellite is illuminated by the Sun, or inEarth’s shadow. Larger uncertainties in the radiation pressure force come from the directionof this force, depending on the aberration of the incoming light and the angle of reflection.
Fem, the electromagnetic force, is modelled by (3.42) by using a simplified magneticpotential. This simplification together with the uncertain values of q and g1 result in a largerelative uncertainty in the electromagnetic force. This force is usually very small comparedto other perturbing forces, and therefore does not contribute much to the uncertainty ofthe total perturbing force. Upper and lower bounds to the electromagnetic force can bedetermined from observations of satellite orbits.
Jn, Jn,m and Λn,m model the gravity field of a planet. In case of Earth, these parametersare determined from the precise orbit determination of satellites. The terms are known upto degree and order (n and m) 360 [38]. Precision (standard error) of the individual valuesare provided by the different gravity models and depend on the gravity model used.
m and Isp, the parameters defining the thrust of a rocket engine, are often preciselyknown from rocket engine tests on Earth. The uncertainties of the thrust force on thesatellite orbit prediction are the result of the timing of the rocket engine and the directionof the thrust force. Since the thrust force is often large compared to the other perturbingforces, a slight misalignment of the thrust vector can result in large variations in the neworbit. The uncertainties for a satellite maneuver are different for different satellites, rocketengines and maneuver type.
49

Chapter 4
Unified State Model
The Unified State Model (USM) is a combination of coordinate and attitude variable sets,corresponding equations of motion and reference frames developed by Altman in 1972 [1] [66].It is a type of perturbation method (see Section 3.4) that uses the velocity hodograph asreference ”orbit” and quaternions to define the orientation of the orbital plane.
This novel approach may increase computational efficiency and removes singularities inrotation. However, the qualities of the USM are not yet known because there is no literatureon the application of the USM to spacecraft trajectory propagation.
This chapter gives an introduction to the USM and defines all necessary informationto apply the method to trajectory propagation. Equations of motion and variables for theattitude model are not discussed, but can be found in [1].
Section 4.1 gives a short introduction to the velocity hodograph and quaternions. Section4.2 provides the reference frames used in the USM. Section 4.3 defines the USM variables andSection 4.4 the equations of motion. The chapter ends with Section 4.5, the perturbationforces expressed in the USM reference frame.
4.1 Introduction
This section introduces the concepts of phase space, velocity hodograph and mathematicalways to represent rotations. These concepts are essential to understand the Unified StateModel and its advantages and disadvantages.
4.1.1 Phase Space and Velocity Hodograph
A phase space is a space in which all possible states of a system are represented; every stateof the system represents one point in the phase space. For two dimensional systems, thephase space can be shown in a two dimensional diagram. The evolution of the state throughtime is a trajectory (or orbit) in this diagram. Phase space diagrams give insight in thebehaviour of dynamical systems. It can show stability, periodicity, equilibrium points, limitbehaviour and is the starting point for a wide range analysis of dynamical systems. [67]
As a planet or satellite moves along a closed elliptical orbit or along an open parabolic orhyperbolic trajectory, rotation of the velocity vector is non-uniform, and both the directionand magnitude of the vector change.
However, these variations occur in such a way that the end of the velocity vector generatesa circle in velocity phase space (the Velocity Hodograph, see Figure 4.1) whose centre is not
50

4.1. Introduction Chapter 4. Unified State Model
Figure 4.1: Postition and Velocity phase space (Velocity Hodograph). Source: Altman [1].
Figure 4.2: Phase spaces of a Keplerian orbit. Source: Altman [1].
51

4.1. Introduction Chapter 4. Unified State Model
at the origin. In other words, the hodograph of the velocity vector for an arbitrary Keplerianmotion is a circle, even for hyperbolic orbits. Figure 4.1 shows the definition and constructionof a velocity hodograph (velocity phase space).
A Keplerian orbit, but not the position in the orbit, can thus be described by twoconstants (states); the position of the centre of the circle and the radius of the circle inthe velocity phase space. This interesting property is ignored in almost all textbooks onmechanics that treat the orbital motion. The Unified State Model uses these constants asstate variables in a dynamical model of (perturbed) Keplerian motion. [68] [50]
Figure 4.2 shows the position, velocity and acceleration spaces of different orbits arounda single spherical mass. One can see that only the velocity phase space geometry remainsinvariant; a circle. This means that a differential formulation of the orbital trajectorydynamics, due to perturbing forces, will not encounter singularities in the state variables;these velocity parameters are regularized. [1]
4.1.2 Rotations
The orientation of a rigid body or plane (e.g., a Keplerian orbit) in three dimensional spacecan be described by a rotation of the body fixed reference frame with respect to the anotherreference frame. The orientation can thus be represented by rotation(s). Rotations in threedimensional space can be defined in different mathematical forms. Different forms havedifferent properties and qualities. Euler Angles and Quaternions keep track of rotations,while Rotation Matrices provide a convenient way to transform between different referenceframes. A short description of Euler Angles, Rotation Matrices and Quaternions will begiven in the following paragraphs.
Euler Angles
Three dimensional rotations are often represented by three Euler angles, see Figure 4.3.These three angles describe, for example, the orientation of a Keplerian orbit with respectto an inertial frame or the rotation of a reference frame with respect to another referenceframe. Euler angles were already used in astrodynamics as three of the six Kepler elementsbefore Euler started to use them in general mechanics.
The three angles represent three successive rotations about the coordinate axis. Theorder of the three rotations, the direction of the rotation and the axis of rotation all influencethe final rotation. A clear definition of the angles and sequence of rotation is therefore alwaysrequired when using Euler angles. Different conventions exist for different fields of researchand application. In this chapter we use the three Kepler rotation elements as Euler angles.
Euler angles are easy to use, intuitive and can often be directly determined from obser-vations, but they degenerate (lose a degree of freedom, also called ”gimbal lock”) for someEuler angles and the conversion to rotational transformation matrices may result in singularmatrices (determinant is zero, inverse does not exist). Quaternions are introduced in theSection 4.1.2 to solve these problems of Euler angles by using four parameters to describethe rotation.
Rotation Matrix
A rotation matrix is a square matrix that defines a rotation, for example, the orientationof reference frame F1 with respect to reference frame F2 . A transformation matrix canbe constructed from Euler angles or any other parameter set that defines the orientation ofa rigid body. Rotation matrices can also be converted back to Euler angles or any other
52

4.1. Introduction Chapter 4. Unified State Model
Figure 4.3: Euler Angles α, γ and β. Source: WikiMedia [69].
Figure 4.4: According to Euler’s rotation theorem, any rotation may be described usingthree angles. If the rotations are written in terms of rotation matrices D,C, and B, then a general rotation A can be written as A = BCD. Source:Wolfram [70].
orientation parameter set. A rotation matrix does not contain information about possibletranslation between reference frames.
Any vector that is expressed in one reference frame can be expressed in a second referenceframe, with same origin, by multiplication with the rotation matrix. For example, rotationmatrix Tib rotates from reference frame b to i,
xi = Tibxb (4.1)
where xi and xb are the state vector in the inertial and body fixed reference frame (in vectorspace).
As example, we examine the two dimensional rotation of coordinate axis in the plane byan angle θ, as seen in Figure 4.5. From basic trigonometry, we can see that,
x2 = x1 cos θ + y1 sin θ (4.2)y2 = −x1 sin θ + y1 cos θ (4.3)
which we can write in matrix form, the rotation matrix,
T =[
cos θ sin θ− sin θ cos θ
](4.4)
53

4.1. Introduction Chapter 4. Unified State Model
Figure 4.5: Point P in reference frame XY and frame X’Y’, rotated over an angle θ withrespect to frame XY.
We want rotation matrices to be orthogonal such that the inverse of the matrix is simplyits transpose,
T−1ab = TT
ab = Tba (4.5)
A matrix is orthogonal if it has the following properties [71],
• all eigenvalues are 1. one eigenvalue is 1 and the other two are -1. one eigenvalue is 1and the other two are complex conjugates.
• the determinant of the transformation matrix must be equal to 1, to preserve the sizeof the vectors.
Applying this property to (4.1) yields,
xb = Tbixi (4.6)
xi = TTbixb (4.7)
When Euler angles are used to construct the rotation matrix, the rotation matrix canbe defined as three subsequent multiplications of transformation matrices. Every transfor-mation matrix is the rotation about one of the fixed axis. There are several conventions forEuler angles, depending on the axes about which the rotations are carried out, the directionof positive rotation and the sequence of rotations [70]. Rotation matrices are useful to trans-form (rotate) vectors between different reference frames in a fast and efficient way that issuitable for use on computers [72].
Quaternions
The product of two complex numbers can be interpreted as the rotation of vectors in aplane. Quaternions, or hyper-complex numbers of rank 4, are an analogous relation in threedimensional space and use four parameters. Quaternions were first used and published by
54

4.1. Introduction Chapter 4. Unified State Model
William Hamilton in 1847 [73], after his realization that three parameters were not enoughfor a complete non-singular description of rotation. Four parameters are the minimal set fordefining a non-singular mapping between the parameters and their corresponding transfor-mation matrix [74]. Quaternions provide this improvement over Euler angles. [75] [76]
Part of Hamilton’s quaternion definition were the following rules [73] ,
i2 = j2 = k2 = ijk = −1 (4.8)
ij = k jk = i ki = j (4.9)
ji = -k kj = -i ik = -j (4.10)
With these relations, we now define the quaternion, q, as a number with a scalar and athree dimensional vector part,
q = q4 + q1i + q2j + q3k (4.11)
where i, j and k are the standard orthonormal basis vector in R3 and q4, q1, q2 and q3 arecalled Euler parameters.
Quaternions satisfy all algebraic properties (associative and commutative) under theoperations of addition and multiplication, except for the commutative law for multiplication.They can be used in a wide range of applications and mathematical fields. However, in thissection we focus on the quaternion’s ability to represent a rotation in three dimensions.
For use in a three dimensional rotation, quaternions have to satisfy the following con-straint to make the degrees of freedom equal to three instead of four,
q24 + q2
1 + q22 + q2
3 = 1 (4.12)
Since every rotation in three dimensions can be represented by a rotation angle, θ, about aunit vector [x0y0z0]T , this rotation angle and vector can be represented by a quaternion (ora quaternion can be written in terms of an angle and spatial vector),
q4 = cosθ
2q1 = x0 sin
θ
2q2 = y0 sin
θ
2q3 = z0 sin
θ
2(4.13)
We can thus easily compute the rotation angle and axis from the quaternion. Thisquaternion or rotation angle and vector representation of a rotation does not cause thegimbal lock problem because the rotation is described in a single move (independent oforder). This is an advantage over the order dependent successive rotations of Euler angles.
The conversion from quaternion to rotation matrix and Euler angles is given in the nextsection.
4.1.3 Transformations between Rotation Representations
The following transformations can be used to convert between the different rotation repre-sentations; Euler angles, rotation matrices and quaternions.
Quaternions to Rotation Matrix
The rotation matrices that rotate from reference frame i to the rotated frame b are givenby [1],
Tbi =
ε11 ε12 ε13
ε21 ε22 ε23
ε31 ε32 ε33
(4.14)
55

4.1. Introduction Chapter 4. Unified State Model
TTbi =
ε11 ε21 ε31
ε12 ε22 ε32
ε13 ε23 ε33
(4.15)
where εii are given in terms of the Euler parameters by,
ε11 = 1− 2(q22 + q2
3) (4.16)
ε22 = 1− 2(q21 + q2
3) (4.17)
ε33 = 1− 2(q21 + q2
2) (4.18)
ε12 = 2(q1q2 + q3q4) (4.19)
ε13 = 2(q1q3 − q2q4) (4.20)
ε21 = 2(q1q2 − q3q4) (4.21)
ε23 = 2(q2q3 + q1q4) (4.22)
ε31 = 2(q1q3 + q2q4) (4.23)
ε32 = 2(q2q3 − q1q4) (4.24)
We can also write the rotation matrices directly in terms of the quaternions,
Tbi =
1− 2(q22 + q2
3) 2(q1q2 + q3q4) 2(q1q3 − q2q4)2(q1q2 − q3q4) 1− 2(q2
1 + q23) 2(q2q3 + q1q4)
2(q1q3 + q2q4) 2(q2q3 − q1q4) 1− 2(q21 + q2
2)
(4.25)
Euler Angles to Rotation Matrix
The rotation between two reference frames can be performed in 12 different ways. Three con-secutive rotations are performed about one of the axis of the body-fixed reference frame. Noconsecutive rotations about the same axis are allowed. This results in 12 possible sequencesto perform the three dimensional rotation. [77]
If the rotation sequence is z → y → x, with α, β, γ the Euler angles about the x, y, zaxis, the complete rotation is descbibed by,
xa = Tabxb = Tx(α)Ty(β)Tz(γ) (4.26)
where,
Tx(α) =
1 0 00 cosα sinα0 − sinα cosα
(4.27)
Ty(β) =
cosβ 0 − sinβ0 1 0
sinβ 0 cosβ
(4.28)
Tz(γ) =
cos γ sin γ 0− sin γ cos γ 0
0 0 1
(4.29)
56

4.2. Reference Frames Chapter 4. Unified State Model
Quaternions to Euler Angles
The Euler angels in terms of the Euler parameters are given by,αβγ
=
arctan 2(q4q1+q2q3)1−2(q21+q22)
arcsin(2(q4q2 − q3q1))arctan 2(q4q3+q1q2)
1−2(q22+q23)
(4.30)
For q1 = q2 = 12
√2, the arctangent contains a division by zero. This problem can be
solved by using the atan2 function in computer implementations. Atan2(1,0), for example,correctly yields π
2 , while arctan( 10 ) is not defined.
Euler Angles to Quaternions
Quaternion in terms of Euler Angles (Kepler rotation angles); i, Ω and u (u = θ + ω),q1
q2
q3
q4
=
sin(i2
)cos(
Ω−u2
)sin(i2
)sin(
Ω−u2
)cos(i2
)sin(
Ω+u2
)cos(i2
)cos(
Ω+u2
) (4.31)
For orbits with zero eccentricity, e = 0, the argument of periapsis, ω, and therefore theargument of latitude, u, are undefined. This is a problem of Kepler elements and meansthat circular orbits can not be converted to and from Kepler elements.
4.2 Reference Frames
In this section we define the reference frames that are used in the USM. The USM uses threeorthogonal reference frames to describe the motion of an orbiting body. The three referenceframes are visualized in Figure 4.6 and explained below.
• (Fg), the planetocentric inertial reference frame
• (Ff ), an intermediate frame
• (Fe), the rotating body frame
The axis of the reference frames are defined by the following unit vectors,
• (g1, g2, g3)
• (f1, f2, f3)
• (e1, e2, e3)
g1 and g2 lie in the equatorial plane and are fixed in inertial space. g1 can, for example,be defined to point towards the mean vernal equinox at noon on January 1, 2000. g3 isdirected along the spin axis of the planet and completes the right handed system.
The intermediate frame Ff is formed by rotating the inertial frame about the line ofnodes. f1 and f2 lay in the orbital plane, f3 is normal to the orbital plane.
e1 is directed along the position vector, e2 in the orbital perpendicular to the positionvector, e3 is completes the right handed system.e3 and f3 have the same direction.
57

4.3. State Description Chapter 4. Unified State Model
Figure 4.6: Reference frames and angles used in the USM. Source: Chodas [61] based onAltman, 1972 [1].
The position and velocity of the rotating body reference frame with respect to the inertialreference frame are given by, XY
Z
= TTbi
r00
(4.32)
d
dt
XYZ
= TTbi
ve1ve20
(4.33)
where TTbi is the transpose of rotation matrix (4.14). And r, ve1 and ve2 can be determined
from the Unified State Variables, which is presented in the next section.
4.3 State Description
The state vector of an orbiting body consists of variables (called ”dynamical variables” or”coordinate sets”) that define the state of the body such that past and future states areuniquely defined. An example of a state vector is a combination of the Cartesian positionand velocity vector. However, the state can also be described in variables that describethe geometry of the (periodic) motion, rotations and in variables with a less clear physicalrepresentation. Examples of state variables are Cartesian position and velocity and Keplerelements.
Many alternative sets of variables are available to describe the state of a moving pointmass in three dimensions. The minimum number of variables is six, resulting from the six
58

4.3. State Description Chapter 4. Unified State Model
first order differential equations that have to be solved, but more can be used. Different setshave different analytical and computational properties, but none is best or most efficient forall problems. [50]
The Cartesian coordinates, for example, are easy to visualize, understand, transform andmodel with. They do, however, change rapidly for satellite orbits and do not use the simplegeometry of orbits to increase computational efficiency in trajectory propagation.
Kepler elements, on the other hand, contain five constants. The five constant Keplerelements completely describe the geometry of a Keplerian orbit, its orientation in threedimensional space. The sixth element describes its position on the ellipse as function oftime.
Kepler elements can be used for analytical orbit analysis and more accurate and efficientorbit simulations. The use of (almost) constant variables also has advantages for intervalintegration, this will be explained in detail in Chapter 6. However, changing Kepler elementsare more difficult to implement and transform.
The USM variables also contain constants, not related to the shape of the orbit, but tothe shape of de velocity hodograph (see Section 4.1.1), which is always a circle for Keplerianorbits. For the orientation of the orbit, the Unified State Model uses a quaternion (fourparameters) instead of the three Euler angles in the Kepler elements. This removes thegimbal lock problem with Euler angles and guarantees transformation matrices to have aninverse.
To show the similarities and differences between Cartesian, Kepler and USM state de-scriptions, a short overview of the Cartesian state vector and Kepler elements will be givenin the next subsections, before we present the full USM state description.
4.3.1 Cartesian Coordinates
Cartesian position (r = [x y z]T ) and velocity (v = [vx vy vz]T ) vectors are widely used asstate variables in dynamical modelling. When these two vectors are known at a certain time,they can serve as initial values in an initial value problem. Future and past states of thebody can be determined from these initial values by integrating the differential equationsthat describe the motion of the body.
Cartesian coordinates are very general, easy to visualize and have excellent algebraicproperties because Cartesian coordinates describe a orthogonal vector space.
Cartesian coordinates have no specific advantages when used to describe an orbitingbody. It does not contain direct information about the shape, size or orientation of the orbitin case of a two body problem. Cartesian coordinates only contain position and velocityinformation about a point and need integration to determine past and future position andvelocities.
4.3.2 Kepler Elements
A Keplerian orbit is a conical section, six Kepler elements completely define the positionand velocity of the body in three dimensional space. Kepler elements are a set of integra-tion constants that have a physical interpretation for (instantaneous) Keplerian orbits. SeeFigure 3.3, Figure 3.4 and Section 3.1.4 for the definitions of the Kepler elements.
e, the eccentricitya, the semimajor axisi, the inclinationΩ,the longitude of the ascending node
59

4.3. State Description Chapter 4. Unified State Model
Figure 4.7: Position phase space of a Kepler orbit. Source: Altman [1].
ω, and the argument of periapsisτ , the time of pericenter passage;
Some of the above mentioned Kepler elements can be interpreted as describing the motion(orbit) in position phase space (an ellipse) for the two body problem and others as anglesfor the orientation of the orbital plane.
The method of variation of orbital elements (Section 3.4.2) and the method of Encke(Section 3.4.1) both use the fact that Kepler elements are constant for a two body problem.They use this constant orbit as reference orbit and only integrate (small) perturbations withrespect to this reference orbit. This makes it possible to use larger integration stepsizes ora higher accuracy and precision.
Position Phase Space Elements
e, a can be interpreted as constants that define the shape and size of a Keplerian orbit inthe position phase space, see Figure 4.7.
Euler Angle Elements
Ω, ω and i can be interpreted as variables that define the orientation of the orbit in threedimensional space. These three angles are now called Euler angles, their definition can beseen in Figures 3.4.
The last element, τ , determines the position of the body in the orbit and is a functiontime.
4.3.3 Unified State Model Variables
The USM uses seven state variables to describe the state of the orbiting body. C, Rf1 andRf2 are functions of the radial and angular momentum that determine the energy of thesatellite and the size and position of the orbit in velocity phase space (velocity hodograph),see Figure 4.1. Rf1 and Rf2) are the components of R in the f1 and f2 direction.
q4, q1, q2, q3 are four Euler parameters defining a quaternion (see Section 4.1.2) thatdetermines the orientation of the satellite fixed reference frame, Fb with respect to theinertial reference frame, Fi. [1]
The USM variables differ from Cartesian coordinates because the USM uses the geometryof the velocity phase space and its orientation in inertial space to define the state of a satellite,
60

4.3. State Description Chapter 4. Unified State Model
where as in Cartesian coordinates, the position and velocity vector determine the state.The USM variables are somewhat similar to Kepler elements because Kepler elements
describe the geometry and orientation of the orbit in position phase space, and the USMdescribes the orientation and geometry of the orbit in velocity phase space.
Velocity Phase Space Variables
While the Kepler elements a and e define the shape and size of an ellipse in the positionphase space (see Figure 4.7), the USM uses C and R to define the shape and size of a circlein the velocity phase space (see Figure 4.8). C and R are the magnitude of the velocityvector (v) components R and C,
v = R + C (4.34)
R always has the same direction, in the direction of the velocity at periapsis. C is alwaysperpendicular to the radius vector. For an unperturbed two body problem, the magnitudeof both R and C is constant.
We can see from Figure 4.8 that the velocity phase space is a circle. We will show thismathematically and derive an expression for the radius, C, of this circle.
For the acceleration of an orbiting body we have,
d2rdt2
= − µr3
r (4.35)
we introduce the angular momentum,
pλ = mrve2 = mθr2 (4.36)
which can be rewritten as,1r2
=m
pλθ =
m
pλ
dθ
dt(4.37)
substituting (4.37) into (4.35) yields,
d2rdt2
=dvdt
= −µmpλ
rr
dθ
dt(4.38)
for a small time interval ∆t, the magnitude of the velocity increment is given by [68],
|∆v| = µm
pλ∆θ (4.39)
the increment in speed (magnitude of the velocity) is proportional to the angle ∆θ. Fur-thermore, ∆v is always directed in the opposite direction of the radius vector, r, becausethe (gravitational) acceleration is always directed towards the center of the central body. Ageometric interpretation is that the subsequent ∆v’s create a circle in velocity space, withradius µm
pλ. We have thus derived the magnitude of C,
C =µm
pλ(4.40)
We can write C in terms of the velocity at periapsis and apoapsis using the fact that theorbital energy is constant, the orbital energy at periapsis and apoapsis are thus equal,
m
(v2p
2− µ
rp
)= m
(v2a
2− µ
ra
)(4.41)
61

4.3. State Description Chapter 4. Unified State Model
Figure 4.8: Top: Position phase space of a Keplerian orbit with velocity components Cand R together with the radial and angular velocity components ve1 and ve2.Bottem: The velocity phase space of the same Keplerian orbit, again withvelocity components C and R as in the top figure.
62

4.3. State Description Chapter 4. Unified State Model
we solve for µm, where we use that rpvp = rava and mrpvp = pλ,
µm =(v2p − v2
a)2(vp − va)
pλ (4.42)
For which follows for C,
C =µm
pλ=
12
(vp + va) (4.43)
We also note that C can be written in terms of the velocity at periapsis, vp, and the circularvelocity at periapsis, vcp =
õrp
,
C =µm
pλ=
µ
rpvp=v2cp
vp(4.44)
We will now derive an expression for the displacement of the centre of the velocity hodograph,R. From Figure 4.8 we can see that R is the vectorial sum of ve1 and ve2 −C,
R = ve1 + (ve2 −C) (4.45)
and for its magnitude we have,
R =√v2e1 + (ve2 − C)2 (4.46)
which can be written in terms of the radial and angular momentum, pr and pλ,
pr = mve1
pλ = mrve2
as,
R =
√(prm
)2
+(pλmr− µm
pλ
)2
(4.47)
and in terms of the speed at periapsis and apoapsis,
R =12
(vp − va) (4.48)
and, at last, in terms of C and the energy, E,
R =√
2E + C2 (4.49)
For a two body problem and no perturbation forces, C, Rf1 and Rf2 are constant. Thismeans that they can be used in a method similar to the method of variation of orbitalelements (Section 3.4.2) to efficiently compute the deviations from the reference orbit dueto perturbing forces. The method of variation of USM variables will be presented in thenext section, where the derivatives of the USM variables due to perturbing forces will bepresented.
63

4.4. Variation of Unified State Variables Chapter 4. Unified State Model
Quaternion Variables
The USM uses a quaternion to keep track of the orientation of the orbital plane. Quaternionsare chosen in the USM because at least four parameters are necessary for a singular freedescription of orientation. q4, q1, q2, q3 are the four parameters in,
q = q4 + q1i + q2j + q3k
and are called Euler parameters. To keep the number of degrees of freedom equal to three,the following constraint is introduced that completes the quaternion rotation description inthe USM,
q24 + q2
1 + q22 + q2
3 = 1
Quaternions have the following major advantages over Euler angles, see [1] [74] [75] [76],
• No singular conditions in rotation occur; the degrees of freedom are never lost.
• All angular functions are algebraic; no trigonometrical functions.
4.4 Variation of Unified State Variables
The unified state variables C, Rf1 and Rf2 are constant for the unperturbed two bodyproblem. If perturbing forces act on the body, the time rate of change of these state variablesdue to these force components in the e1, e2 and e3 direction is described by the followingfirst order differential equations, as derived by Altman [1] and corrected by Chodas [61] andVittaldev [78]
d
dt
CRf1
Rf2
=
0 −p 0cosλ −(1 + p) sinλ −γRf2/ve2sinλ (1 + p) cosλ −γRf1/ve2
ae1ae2ae3
(4.50)
where, [sinλcosλ
]=
1(q2
3 + q24)
[2q3q4
q24 − q2
3
](4.51)
which becomes singular for q3 = q4 = 0. From (4.31) we can see that this corresponds withretrograde equatorial orbits (i = 180 degree). This means that the USM breaks down forretrograde equatorial orbits. This orbit can be avoided by using a negative orbital velocityand zero inclination.
The body fixed velocity components are given by,[ve1ve2
]=[
0C
]+[
cosλ sinλ− sinλ cosλ
] [Rf1
Rf2
](4.52)
The parameter γ is used in (4.50) for compactness and is given by,
γ =q1q3 − q2q4
q23 + q2
4
(4.53)
This term also becomes singular for q3 = q4 = 0, which are polar orbits as explained above.The variable p is the ratio between C and the velocity perpendicular to the radius vector,
p =C
ve2(4.54)
64

4.5. Perturbing Forces in the Unified State Model Chapter 4. Unified State Model
C and ve2 have the same direction. Only the magnitude of ve2 changes for a unperturbedtwo body problem. ve2 is largest at periapsis and smallest at apoapsis. C is given in termsof the velocity at periapsis and apoapsis by (4.44), so that we can write for the minimumand maximum values of p,
pmin =vp + va
2vp=
12
(1− e1 + e
+ 1)
=12
(rpra
+ 1)
(4.55)
pmax =vp + va
2va=
12
(1 + e
1− e+ 1)
=12
(rarp
+ 1)
(4.56)
for elliptical orbits this means that p > 0 and for circular orbits p = 1. p is singular forve2 = 0, which is the case when the body is not orbiting and moves in a straight lines to oraway from the centre of gravitational attraction. This situation does generally not happenin reality and is of no concern for the simulation of satellite orbits.
Finally, a is the acceleration vector with components in the e1, e2 and e3 direction.
a =
ae1ae2ae3
=∑
ai (4.57)
The time rate of change of the quaternion variables is given by,
d
dt
q1
q2
q3
q4
=12
0 ω3 0 ω1
−ω3 0 ω1 00 −ω1 0 ω3
−ω1 0 −ω3 0
q1
q2
q3
q4
(4.58)
where ω are the body-fixed angular velocity components,
ω1 =ae3ve2
(4.59)
ω2 = 0 (4.60)
ω3 =Cv2
e2
µ(4.61)
The angular velocity, ω2, about the e2 axis is zero because there never is a velocity componentout of the instantaneous orbit plane.
It should be noted that the constraint on the quaternion,
q21 + q2
2 + q23 + q2
4 = 1 (4.62)
still holds.
4.5 Perturbing Forces in the Unified State Model
The variational equations (4.50) and (4.58) are functions of the acceleration in the e1, e2
and e3 direction. These perturbing force component can be derived for all perturbing forcesgiven in Section 3.3. Only the atmospheric drag and J2 gravity perturbations are given inthis section.
65

4.5. Perturbing Forces in the Unified State Model Chapter 4. Unified State Model
Arbitrary Force
An arbitrary force F on the body is included in the model as the acceleration in (4.50),
a =Fm
(4.63)
where only the force components in the bode fixed reference frame (e1, e2, e3) are required.Transformation from inertial to body fixed reference frame can be done by the transforma-tions given in Appendix A.
This, however, means that the USM variables have to be converted to Cartesian variablesto compute the force. This increases computation steps and may lead to overestimation inthe in interval integration methods that will be discussed in Chapter 6 and are essential forguaranteed collision avoidance.
Therefore a more direct expression for the acceleration components in the body-fixedreference frame were derived for atmospheric drag and disturbed gravity fields by Altman [1].These will be presented in the next subsection, for
Atmospheric Drag
The drag is typically modelled by,
Fdrag = −12ρCDSvv (4.64)
where CD is the drag coefficient of the satellite that has to be determined from experiment,ρ the density of the atmosphere, S the frontal surface area of the satellite and v the velocityof the spacecraft with respect to the atmosphere.
Altman used an atmospheric density model from Broglio [1]. This model from 1964 cannot be found in the literature and is, according to Altman, based on the assumption that,
ρr√M = constant (4.65)
where ρ is the density, r the orbital radius and M the satellite’s Mach number.This model, models the density as a function of the density at sea level. However, at the
altitudes where satellites orbit (>100 km), the atmospheric density has little relation to thedensity at sea level and Broglio’s model is therefore not suitable for high altitudes [38].
Altman derived the body-fixed drag components in terms of the USM variables, wherehe used Broglio’s atmospheric model. The author was not able to reproduce and verifyhis derivation. His expressions are therefore not very accurate and will not be used in thecollision avoidance system. His drag equations are given for completeness,ae1ae2
ae3
drag
= −ρ0
2
(CDS
m
)(Cve2µ
)ζvr
vr/e1vr/e2vr/e3
(4.66)
where,vr/e1vr/e2vr/e3
=
ve1ve20
+ rωe
0−ε33
ε23
+q
(1− ε213)1/2[E]0
ε11ε13 ε12
ε12ε13 ε11
−1 0
[cosSzsinSz
](4.67)
vr the relative velocity to the atmosphere,
vr =√v2r/e1 + v2
r/e2 + v2r/e3 (4.68)
66

4.5. Perturbing Forces in the Unified State Model Chapter 4. Unified State Model
r the distance to the origin of the inertial reference frame, follows from combining (4.43)and (4.36),
r =µ
Cve2(4.69)
ζ the square of the Mach number for the orbital velocity,
ζ =√M (4.70)
CD the drag coefficient of the orbiting body. ρ0 the atmospheric density at sea level. Sthe cross section area of the orbital body. q the atmospheric wind velocity in the localhorizon plane. Sz the direction of the wind velocity q in the local horizon plane, referred tothe projection of the Z-axis on the plane. [E]0 the transformation matrix of body attituderotation. And ωe the planetary rate of rotation about its Z-axis.
Better atmospheric density models for satellites are presented in Mentenbruck et al. [38].Precomputed density tables can be used for local polynomial interpolation. This can replace
the ρ02
(Cve2µ
)ζdensity term in (4.71). The drag in terms of the USM variables then becomes,ae1ae2
ae3
drag
= −12ρ
(CDS
m
)vr
vr/e1vr/e2vr/e3
(4.71)
Gravity Field
The acceleration due to the J2 gravity potential in the direction of e1, e2 and e3 is givenby [1], ae1ae2
ae3
J2
= −32µR2
eJ2
(Cve2µ
)41− 3ε213
2ε13ε23
2ε13ε33
(4.72)
where Re is the radius of the planet (Earth). J2 is defined in Section 3.3.2 and εii in Section4.1.3.
67

Chapter 5
Conventional ODE Integration
This chapter gives a brief overview of conventional ordinary differential equation (ODE) inte-gration methods, to provide a comparison for the methods discussed in Chapter 6. Chapter6 will discuss guaranteed (also called verified) ODE integration methods where the solutionis guaranteed to be contained within a certain enclosure. In contrast with the methodsin Chapter 6, the conventional methods in this chapter only yield approximate solutions.Furthermore, there is no way to be sure how accurate these approximation are, althoughapproximate estimates are possible.
Conventional methods are accurate (as can be seen from comparisons with experiments)enough for many ODEs, but for some ODEs and IVPs they are not. Moreover, if experimentsverify the accuracy of a conventional method for a specific initial value problem, this doesnot guarantee accuracy for other initial values.
This chapter summarizes the well known concepts and methods of ODEs and numericalintegration. A more elaborate treatment of this subject can be found in the books by, forexample, Stoer [79], Butcher [80], Hoffman [81] and Vuik [82] on which this chapter is based.
The first Section, 5.1, of this chapter gives a brief introduction in the type of differentialequations we will focus on in this report; ordinary differential equations and initial valueproblems. Section 5.2 gives an overview of the most common numerical integration methodsfor IVPs. Section 5.3 discusses the errors introduced by using these methods on a computerand the chapter ends with Section 5.4, a short discussion of the accuracy properties ofconventional methods.
5.1 Introduction
Ordinary Differential Equations (ODE) are functions depending on a single independentvariable; only ordinary derivatives (dxdt ), appear in the differential equations [83].
An Initial Value Problem (IVP) is an ordinary differential equation together with aspecified value, called the initial value (or initial condition), of the unknown function at agiven point in the domain of the solution [83]. Trajectory propagation, starting from a certaingiven position and velocity, is an IVP. The initial position and velocity are the initial values.The equations of motion are the ODEs.
Models in physics and engineering are often based on Newton’s second law in which theforce on a mass is a function of time, position and velocity. The initial state of the system,and thereby its future states, are determined by the initial values, in this case the positionand velocity at the start of the integration, t = t0. Such a model is an IVP of the following
68

5.1. Introduction Chapter 5. Conventional ODE Integration
general form,
md2r(t)dt2
= F(t, r(t)) (5.1)
r(t0) = r0
drdt
(t0) = v0
where F is the force acting on a point with mass m, position r(t) and velocity v(t), and r0
and v0 are the initial position and velocity of the point mass.The second order differential equation can be written as a system of first order differential
equations by combining the position and velocity vectors in a new six dimensional statevector x,
x =[rv
]=
xyzvxvyvz
(5.2)
For which the derivative becomes,
dxdt
=[va
]=
vxvyvzaxayaz
= f(t,x(t)) (5.3)
where a is the acceleration given by,
a =Fm
(5.4)
The resulting general system of first order ordinary differential equations, with initial value,can now be written as,
dx(t)dt
= f(t,x(t)) (5.5)
x(t0) = x0
The system for Earth orbiting the Sun is given in Example 1. Integrating (5.5) yields,
x(t) = x0 +∫ t
t0
f(s,x(s))ds (5.6)
Differential equations of this form are generally difficult or impossible to solve analyti-cally (exact). Numerical methods are developed to approximate the solution of differentialequations using numbers, general algebraic operations (addition and multiplication) andfinite steps, instead of symbols and infinite differential calculus operators. The finite andelementary algebraic nature of numerical methods make them exceptionally suitable for useon computers.
69

5.2. Numerical Methods Chapter 5. Conventional ODE Integration
Example 1: System of first order ODEs for Earth orbiting the Sun.
xearth = x =[reve
]=
xyzvxvyvz
(5.7)
dxdt
= f(x) =
vxvyvz
−Gmsunr3 x
−Gmsunr3 y
−Gmsunr3 z
(5.8)
r =√x2 + y2 + z2 (5.9)
5.2 Numerical Methods
Many different numerical integration methods have been developed to integrate functionsfor which no closed form analytical solution exists. All methods can be divided into singleor multi-step methods, and explicit or implicit methods.
Single step methods use the current state to calculate the next, while multi-step methodsuse one or more previous steps to compute the next state.
Explicit methods compute the next step from the current step, while implicit methodsuse the current and estimated next step to compute the next step.
5.2.1 Taylor Series
The Taylor series is a power series representation of a function as an infinite sum of terms cal-culated from the values of its derivatives at a single point. The Taylor series approximationof a function f(x), in the neighbourhood of a, is given by,
f(x) =∞∑n=0
f (n)(a)n!
(x− a)n (5.10)
or written in finite terms, called a Taylor polynomial,
f(x) = f(a) + f ′(a)(x− a) +f ′′(a)
2!(x− a)2 + ...+
f (n)(x(a))n!
(x− a)n +Rn(x) (5.11)
with Rn(x) the remainder term, denoting the difference between the Taylor polynomial ofdegree n and the original function.
We now substitute (5.11) into (5.6), which after a simple analytical integration resultsin the following Taylor series for the position x(t1),
x(t0 + h) = x(t0) + hf(x(t0)) +12!h2f ′(x(t0)) + ...+
1n!hnf (n−1)(x(t0)) +Rn (5.12)
where d(x(t))dt = f(x(t)), h = (t1 − t0) and Rn the remainder term.
70

5.2. Numerical Methods Chapter 5. Conventional ODE Integration
The Taylor series converges to the true function value for some stepsize h and for mostfunctions. The problem of applying Taylor series in dynamical models is obtaining the higherorder derivatives of the state vector.
Other numerical methods all try to approximate the Taylor polynomial by functionevaluations of the first derivative of x(t), dx(t)
dt = f(x(t)) (the force function), only. However,it is also possible to use recurrence relations to compute the exact values of all higher-orderderivatives of x(t), at some time t, as long as f(x) is known. This so called ”AutomaticDifferentiation” is discussed in more detail in Section 6.6 and takes more computationaltime than methods that only use force-function evaluations (computation of the first orderderivative of the state vector).
5.2.2 Euler Methods
The oldest and simplest numerical approximation method is Euler’s method. This methodis expressed by the equation,
xi+1 = xi + hf(xi) (5.13)
which is the Taylor series truncated after the second term. It is the ”linear” or ”first-order”approximation; it only uses the first derivative of x(t).
A simple example is the approximation of the distance travelled, s(t + ∆t), at time,t+ ∆t. For the distance and velocity at time t are s(t) and v(t),
s(t+ ∆t) = s(t) + v(t)∆t (5.14)
When v(t) is constant, the higher order derivatives of s(t) are zero and the approximationbecomes exact.
5.2.3 Runge-Kutta Methods
Runge-Kutta (RK) methods are methods for the numerical solution of the ordinary differ-ential equations,
dx
dt= f(t, x(t)) (5.15)
Runge and Kutta developed their numerical method by trying to create formulas that matchthe first n terms of the Taylor series (5.10), but without using derivatives of f(x). The RKTaylor series approximation,
x(t+ h) = x(t) + h
s∑i=1
bigi (5.16)
with,
gi = f
t+ cih, x(t) + h
s∑j=1
aijgj
(5.17)
Euler’s method is in fact a Runge-Kutta method of first order with all coefficients in (5.17)zero except for b1, which is 1.
The most popular Runge-Kutta method is the classic fourth-order method, defined by,
x(t+ h) = x(t) +16
(k1 + 2k2 + 2k3 + k4) (5.18)
71

5.2. Numerical Methods Chapter 5. Conventional ODE Integration
where,k1 = hf(t, x(t)) (5.19)
k2 = hf
(t+
12h, x (t) +
12k1
)(5.20)
k3 = hf
(t+
12h, x (t) +
12k2
)(5.21)
k4 = hf(t+ h, x(t) + k3) (5.22)
The coefficients of a Runge-Kutta method, (5.17), can be conveniently organized in a socalled ”Butcher tableau”, see Table 5.2.3. The Butcher tableau for the most common fourthorder RK method is shown in Table 5.2.3.
Table 5.1: General Butcher tableau of Runge-Kutta coefficients. [80]
c AbT
Table 5.2: Butcher tableau of classic fourth order Runge-Kutta method. [79]
012
12
12 0 1
21 0 0 1
16
13
13
16
RK methods up to at least order 12 are known. Although above order four, it is nolonger possible to obtain order n with n function evaluations. For example, a 6th ordermethod requires seven function evaluations and a 12th order 16 evaluations. This meansthat while the order does increase, the efficiency of the method decreases. Furthermore,there is no optimal set of coefficients for higher-order methods that is best (smallest error)for all differential equations. [84]
Error estimates for numerical methods are useful for (adaptive) stepsize determination.”Embedded” Runge-Kutta methods use the difference between two order approximationsas an error estimate. The Dormand-Prince method is an example that uses six functionevaluations to calculate the fourth and fifth order solutions, which can be used as errorestimate for adaptive stepsize algorithms. The widely used Matlab ode45 solver is based onthe Dormand-Prince method.
5.2.4 Multistep Methods
Euler and Runge-Kutta methods, discussed in the previous subsections, are one-step meth-ods because they refer only to one previously calculated value to determine the next value.Multi-step methods use more than one previous value to determine the next value, they areused to try to increase the accuracy over one-step methods.
A wide range of multi-step methods exists, the most commonly used are Adams-Bashforth,Adams-Moulton and Backwards Differentiation (BD) methods. Adams-Bashforth methods
72

5.3. Errors Chapter 5. Conventional ODE Integration
are explicit, while Adams-Moulton and BD methods are implicit. Only one example of aforth-order explicit Adams-Bashforth method will be given here,
x(t+ h) = x(t) +h
24[55f(t, x(t))− 59f(t− h, x(t− h)) (5.23)
+ 37f(t− 2h, x(t− 2h))− 9f(t− 3h, x(t− 3h))]
5.3 Errors
Numerical methods use finite numbers and finite steps to approximate continuous differentialequations. This finite approximation introduces errors; the differences between the real andapproximated solution. There are two kinds of errors, truncation and rounding errors.
The error occurring in a single step, assuming no errors in previous steps, is called thelocal truncation error. The total accumulated error over the whole integration interval iscalled the global truncation error.
Rounding errors are the result of the finite representation of numbers in computers.
Truncation Errors
For the following discussion about the truncation error, we assume that the computation isdone using infinite digit numbers and therefore no rounding errors occur. Rounding errorsare discussed separately in the next subsections.
Truncation errors are the result of the finite number of steps used in numerical approx-imations of continuous (infinite small stepsize, infinite steps) differential equations. Thetruncation error is thus the difference between the real and approximated solution. Thelocal truncation error is the truncation error resulting from a single step. The global trun-cation error is the summation of all local truncation errors over the integration interval.The global truncation error is thus the total difference between the real and approximatesolution, at some time t, if infinite digit numbers would be used.
It is not possible to determine the exact size of the truncation error, because the exactsolution is not known for all practical applications of numerical methods. Nevertheless,mathematical analysis can give an estimate of the size and proportionality to the stepsizeof the local and global truncation error, as we will show now.
For Euler’s method, the local truncation error can be analysed by using a higher ordertruncated Taylor polynomial of x(t) about ti,
x(ti + h) = x(ti) + f(x(ti))h+f ′(x(ti))
2h2 +Rn(x(ξ)) (5.24)
where ξ is some point in the interval ti < ξ < ti + h. Subtracting Euler’s approximation(5.13) from (5.24) we find,
x(ti + h)− xi+1 = (x(ti)− xi) + (f(x(ti))− f(xi))h+f ′(x(ti))
2h2 +Rn(x(ξ)) (5.25)
For the local truncation error we assume no errors from previous steps, x(ti) = xi, this givesthe local truncation error, ei+1 as,
ei+1 = x(ti+1)− xi+1 =f ′(x(ti))
2h2 +Rn(x(ξ)) (5.26)
73

5.3. Errors Chapter 5. Conventional ODE Integration
Rn(x(ξ)) can be expressed as the Lagrange Remainder term that encloses the remainder,see Section 6.2.1 for a more elaborate discussion and [85], [86], [87] and [88] for derivation andproof,
Rn(x(ξ)) =f ′′(x(ξ))
3!h3 (5.27)
ξ ∈ [ti, ti + h]
From (5.26) it follows that for small h, the dominant part of the local truncation error ofthe Euler method is proportional to the square of the stepsize, h2, and the proportionalityfactor depends on f ′(x).
A uniform bound, valid on the time interval [ti, ti+h] is given by the Langrage Remainderterm,
|ei| ≤Mh2
2(5.28)
where M is the maximum of |f ′(x(ti))| on the interval [ti, ti + h]. Since this is a worst casescenario, it may be a considerable overestimate of the actual local truncation error.
The global truncation error is more important than the local error, but is also moredifficult to analyse. A simple estimate, ignoring the propagation of previous errors, of theglobal truncation error can be made using the local truncation error. The error in n stepsis bounded by nM h2
2 , noting that n = (tend− t0)/h, we find for the global truncation error,
nMh2
2= (tend − t0)M
h
2(5.29)
Although this is a very rough estimate, it can be shown that the global truncation error isindeed proportional to the first power of the stepsize, h1.
Since computers can only store floating point numbers in finite digits, a different errorcaused by rounding also occurs. This is the so-called rounding error.
Rounding Errors
Rounding errors are the result of the finite digit representation of real numbers in computers.Different applications require different precision and therefore different number of memorybits per stored number. When a new number is computed from two stored numbers, theresult is rounded and stored in the computer’s memory.
This rounding introduces a small error between the stored and real result of the com-putation. Rounding errors can accumulate and become large in the final result when manycomputation are involved. The number of bits that are used to store numbers can be definedby the user, although it should be kept in mind that a larger number of bits results in morememory and larger computation times.
Figure 5.1: Layout of 64bit double precision floating point number in computer memory.Image source: Wikipedia [89].
74

5.4. Accuracy Properties Chapter 5. Conventional ODE Integration
Most computer simulations use double precision, 64 bit, floating point numbers. 1 bitis used for the sign of the number, 11 bits for the exponent and 52 bits for the significantprecision. This means that a double precision number contains approximately 16 significantdecimal digits.
5.4 Accuracy Properties
The accuracy of numerical methods can be described by their convergence, order, stabilityand stiffness. This section gives a short overview of the concepts that determine the qualityof a numerical method. The definitions vary and are not possible to describe exactly andquantitatively. Convergence, stability and stiffness are properties of an integration methodin combination with a specific IVP, while order is only a property of the integration method.
5.4.1 Convergence and Order
A numerical method is convergent if the difference between the true solution and thenumerical approximation goes to zero if the stepsize goes to zero.
||xi − x(ti)|| → 0 as i→∞ (h→ 0) (5.30)
Higher order (> 3) Taylor Series and Runge-Kutta methods are convergent for almost allpractical IVPs. Non-convergent methods are likely to generate increasingly meaninglessresults when smaller stepsizes, and more computational time, are used. Therefore, all nu-merical methods used in science and engineering should be convergent.
The order, p, of a method is defined by the power of the stepsize to which the globaltruncation error is proportional. In general, the local truncation error is proportional tohp+1 and the global truncation error on a finite interval is bounded by a constant times hp.
A smaller stepsize decreases the global truncation error but increases computational timeand rounding errors.
5.4.2 Stability and Stiffness
A numerical method is stable, for a particular differential equation, if the difference betweenthe real and numerical solution is bounded or goes to zero over time when small disturbancesor errors are introduced. It means that a certain error in initial values or an error caused bytruncation and rounding errors does not cause the numerical solution to deviate unbounded(the errors are magnified) from the numerical solution. Stability analysis is an importantbut complicated part of numerical analysis. The stability analysis of different numericalmethods and differential equations can often be found in literature. [80]
Numerical methods can only be stable for stable differential equations; a numericalmethod can not make an unstable ODE stable, but can make a stable ODE unstable. Sta-ble differential equations are different equations in which the solutions stays ”close” to thereference solution (Lyapunov stability) or moves back to the reference solution (asymptoticstability) when there is a small disturbance or error in the initial conditions.
Differential equations that require a very small (smaller than needed for accuracy) step-size to become stable for some numerical methods are called stiff. An example of a stiffdifferential equation is given by Gear [90],
x′ = a(x− p(t)) + p′(t) (5.31)x(0) = v (5.32)
75

5.5. Random Error Propagation Chapter 5. Conventional ODE Integration
where a is a constant. The analytical solution is,
x(t) = (v − p(0)eAt) + p(t) (5.33)
For large negative values of a, the solutions converges very fast; the problem is super-stable.This super-stable property turns out to be a problem for numerical integration methods;(5.31) is stiff.
Stiff differential equations require special attention and/or methods before the numericalsolution can be assumed reasonably close to the real solution. Typical orbit integrationproblems are non-stiff. For numerical methods for stiff equations to reader is referred to thebooks by Gear [91] and Hairer and Wanner [92].
5.5 Random Error Propagation
Current collision avoidance is based on estimates of the collision probability. This collisionprobability depends on errors in the knowledge of the state (for example, position andvelocity) of the satellites at time t0. These errors are estimated by propagating the (assumed)known error Probability Density Function (PDF) at time t0 to time t1. [16] [35]
Figure 5.2: Two dimensional Gaussian (normal) distribution. Image source:Wikipedia [93].
The position error is typically modelled as a random vector with a three dimensionalGaussian (normal) PDF. This PDF can be defined in terms of the 3x3 position error covari-ance matrix, Cp
[34],
f(re) =1√
(2π)3|Cp|e−( 1
2 rTe C−1p re) (5.34)
where |Cp| is the determinant of Cp and re the position error.Figure 5.2 shows a two dimensional Gaussian PDF. The three dimensional PDF is similar,
but with one extra dimension. Cp defines the (shape) spread of the normal distribution.A covariance matrix is a matrix of covariances between elements of a random state vector.
The covariance is a measure of how much two state variables affect each other when theychange and is defined as,
Cov(xi, xj) = E((xi − xi)(xj − xj)) (5.35)
where E is the expected value operator and E(xi) = xi. The covariance Cov(xi, xi) is calledthe variance of xi, V ar(xi), which in turn is the square of the standard deviation σ.
V ar(xi) = σ2i (5.36)
76

5.5. Random Error Propagation Chapter 5. Conventional ODE Integration
So for the covariance matrix we have,
Cp =
V ar(x1) . Cov(x1, xn). . .
Cov(xn, x1) . V ar(xn)
(5.37)
If the state of the system is given by position and velocity, the covariance matrix is a 6× 6matrix.
Since the covariance matrix determines the n-dimensional error PDF, (5.34), we can usethe covariance matrix to generate an ellipsoid of constant probability around a referenceposition.
Two common methods to propagate error PDFs are Monte Carlo and covariance matrixpropagation. Both methods are biased (approximations) for non-linear systems becausethey use a truncated series expansion and a finite number of integrations. This makes themethods non-guaranteed (or non-verified).
5.5.1 Monte Carlo
Monte Carlo methods are a class of computational algorithms that use a finite numberof random or pseudo-random simulation parameters to approximate a solution. MonteCarlo methods have a wide range of applications including sensitivity analysis of dynamicalsystems, optimization and particle modelling. [94]
Monte Carlo error propagation works by picking pseudo-random (based on the PDF ofthe initial state) initial values from a specified region around the reference position. It thenintegrates the orbits with these initial conditions using numerical integration. The resultingstate, after integration over a certain time, can be used in estimation methods to estimatethe PDF of the simulated state by assuming a Gaussian distribution and estimating thestandard deviation (or variance) from the simulation results. This results in a continuousPDF from a finite number of simulations.
The advantages of Monte Carlo error propagation is that it is highly general and easyto apply. The continuous PDF allows for an easy way to estimate collision probability. Itsgenerality makes it possible to use accurate high-order numerical methods. And it is easyto apply, because existing orbit integration models can be used. [95]
However, Monte Carlo methods are computationally expensive and uncertain. It is a typeof brute force method that relies on computational power instead of a analytical solution.The uncertainty comes from the truncation error in numerical integration (see section 5.3)and estimation of the PDF from a finite number of simulations.
5.5.2 Covariance Matrix Propagation
Covariance matrix propagation methods uses the first order state transition matrix of asystem to propagate a covariance matrix, 5.37, from time t0 to t1. Since the n×n covariancematrix defines the n-dimensional PDF, this is a way to propagate the error PDF of a satellite.When the error PDFs of two satellites at time t1 are known, the resulting collision probabilitycan be determined. A overview of the concept is shown in figure 5.3. [35] [97] [16] [98]
The state transition matrix describes the first order relation between the change of initialstate and the change in final state. The state transition matrix Φ(t, t0) for the orbit statevector x = [r, v]T is given by [38],
Φ(t0, t) =∂x(t)∂x0(t0)
(5.38)
77

5.5. Random Error Propagation Chapter 5. Conventional ODE Integration
Figure 5.3: Analytic and numerical error covariance matrix propagation with exaggeratederror ellipsoids at times t0 and t. Image source: Der [96].
Figure 5.4: Two dimensional mapping onto the B-plane of three dimensional combinedposition uncertainty of two objects at the time of closest approach. Imagesource: Klinkrad [35].
The state transition matrix can be determined in a simplified analytical way or by usingnumerical methods or a combination of both. Different methods for determining the statetransition matrix and a comparison between the different methods can be found in [96].Numerical methods rely on finite difference methods or automatic differentiation (see Section6.6).
78

5.5. Random Error Propagation Chapter 5. Conventional ODE Integration
The state transition matrix can be used to propagate the covariance matrix from timet0 to t1 using the following relation [95] [35],
Cp(t1) = Φ(t, t0)Cp(t0)Φ(t, t0)T (5.39)
A major advantage of covariance matrix propagation is its computational efficiency. Thisefficiency is the result of the linearisation of the error propagation, which is also the majordisadvantage of the method. This linearisation means that possible large truncation errorsare ignored, which makes the result an approximation.
Several authors have developed methods to determine the probability collision usingcovariance matrix propagation. They all use the following assumptions [35],
• During the conjunction, the target and risk object move along straight lines at constantvelocities.
• The uncertainties in the velocities can be neglected.
• The target and risk object position uncertainties are not correlated.
• The position error covariances during the encounter are constant, corresponding tothose at the time of closest approach.
• The position uncertainties can be combined in a common three-dimensional Gaussiandistribution.
Because of these assumptions and the first order approximation of the method, covariancepropagation is not suitable for guaranteed integration and thus also not for guaranteedcollision avoidance.
79

Chapter 6
Interval ODE Integration
Finding numerical solutions of initial value problems (IVPs) for ordinary differential equa-tions (ODEs) is one of the fundamental problems in scientific computing. A wide rangeof conventional integration methods is available to approximate solutions (see Chapter 5).However, these methods yield only an approximate solution and do not take any round-ing or truncation errors into account. Error estimates are possible with some conventionalmethods, but these are non-guaranteed estimates mainly used for stepsize control. [99]
Moreover, most can only solve for single point initial values instead of a set of initialvalues; the solution is a single point in n-dimensional space and not a bounded set of points.For a set of initial values, solutions can be obtained by variational equations or Monte Carlomethods, but remain non guaranteed estimates.
Verified (guaranteed) integration methods are part of a group of integration methodsthat guarantees solutions to differential equations to be within a certain solution set. Themethods bound rounding errors, truncation errors and can often handle an interval initialvalue and parameter set, instead of a single point. This guarantees, by mathematical proof, asolution to be within certain bounds for uncertain initial values and parameters. This guar-antee is particularly interesting for critical dynamical systems with high safety requirements,but can also be used for global optimization or simply to check the results of conventionalmethods.
Verified integration has one important disadvantage, it often overestimates the solu-tion bounds. This overestimation is mainly the result of the dependency problem and thewrapping effect, which will be explained later. Most research focusses on reducing this over-estimation. Verified integration is also computationally more expensive than conventionalintegration.
The first idea of verified integration came from Moore (1968) [100] when he worked oninterval analysis, a method to bound functions for a range (interval) of variables. Hismethod is based on bounding truncated Taylor series integration methods. Development ofhis method was continued by Eijgenraam [101], Lohner [102], Corliss [103] [104], Rihm [105] [106]
and others. These methods, based on interval analysis and Taylor series, are called IntervalTaylor Series (ITS) methods.
A second group of verified integration methods was developed by Makino and Berz, ini-tially to analyse the stability of particles in particle accelerators [107] [108] [109]. Their methodis also based on truncated Taylor series integration, but uses Taylor models in combinationwith interval analysis to bound solutions. These methods are called Taylor Model (TM)methods. They symbolically propagate initial value sets and use interval analysis to boundrounding and truncation errors.
80

6.1. Interval Analysis Chapter 6. Interval ODE Integration
A third group of verified methods was developed by Marciniak [110] and others. Thesemethods modify conventional Runge-Kutta methods to yield guaranteed solutions. Thismethod is more complex than ITS and TM methods, because bounding the truncationerror of Runge-Kutta methods is more complex. It has the advantage that conventionalRunge-Kutta methods can be used.
This chapter focusses on the verified integration of IVPs of ODEs, which we will callInterval ODE Integration. It should give all information about interval ODE integrationmethods to apply them to spacecraft trajectory propagation with the objective to determinefor two satellites whether A: the satellites are 100% guaranteed not to collide or B: an orbitmaneuver is required to avoid collision.
Since all integration methods use interval analysis, a short introduction to interval analy-sis is given in Section 6.1. Section 6.2 gives an overview of the Interval Taylor Series methods,Section 6.3 of the Taylor Model methods and Section 6.4 of the Interval Runge-Kutta meth-ods. The bounding of rounding errors is discussed in Section 6.5. A useful differentiationmethod for Taylor series integration is given in Section 6.6. Software implementations ofthe methods described in this chapter are shown and compared in Section 6.7. The chapterends with a few applications of interval (verified) ODE integration in Section 6.8.
6.1 Interval Analysis
Interval Analysis (also called interval arithmetic or interval computing) was developed byMoore in the early 1960’s [100]. It can be seen as an extension of real numbers, an interval,that is represented by a pair of real numbers. This new interval contains all real numbersbetween the two; an interval represents a range of numbers. This section gives a briefoverview of the most important rules of interval analysis. It is based on the works byMoore, [111] and [112], to which the reader is referred for more information about intervalanalysis.
In mathematical terms, an interval is a closed bounded set of real numbers,
[a, b] = x : a ≤ x ≤ b (6.1)
We denote intervals by [x], and the endpoints of the interval by¯x and x. Thus [x] = [
¯x, x].
An n-dimensional interval vector is written as a bold letter, [x], which is a vector thatcontains the intervals x1, x2, .., xn ,
[x] =
[x1][x2]..
[xn]
(6.2)
In this chapter, however, we do not use the bold notation and assume that all intervals, [x]can also be interval vectors. This because it clutters the sometimes long equations and isconsistent with the notation in interval literature.
Two intervals are equal if their endpoints are equal, that is,
[x] = [y] if¯x =
¯y and x = y (6.3)
The intersection of two intervals is empty if either¯x > y or
¯y > x and else,
[x] ∩ [y] = [max(¯x,
¯y),min(x, y)] (6.4)
81

6.1. Interval Analysis Chapter 6. Interval ODE Integration
If two intervals have non-empty intersections, their union is again an interval,
[x] ∪ [y] = [min(¯x,
¯y),max(x, y)] (6.5)
The set inclusion of two intervals is given by,
[x] ⊆ [y] if and only if¯y ≤
¯x and x ≤ y (6.6)
The width of an interval is defined by,
w([x]) = x−¯x (6.7)
The midpoint as,
m([x]) =(¯x+ x)
2(6.8)
And the absolute value as,
|[x]| = max(|¯x|, |x|) (6.9)
6.1.1 Interval Arithmetic
Interval arithmetic describes the rules of elementary operations, like addition and multipli-cation, for intervals.
The rules for addition and subtraction are,
[¯x, x] + [
¯y, y] = [
¯x+
¯y, x+ y] (6.10)
[¯x, x]− [
¯y, y] = [
¯x− y, x−
¯y] (6.11)
The rules for multiplication are,
[x] · [y] = [min(¯x¯y,
¯xy, x
¯y, xy),max(
¯x¯y,
¯xy, x
¯y, xy)] (6.12)
By testing the signs of the endpoints of [x] and [y], this can be reduced to nine special cases(see Moore [112] for details).
The multiplicative inverse (reciprocal) is defined as,
1[x]
=[
1x,
1
¯x
](6.13)
if [x] is an interval not containing the number 0. If [x] contains 0, the set is unboundedand cannot be represented as an interval whose endpoints are real numbers; both boundsgo to infinity. This loses valuable information about the division that cannot be containedin a single interval. However, splitting the interval in two parts, [−∞, 1/y1] and [1/y2,∞],and using two intervals can contain the information. This has been implemented in severalinterval software tools discussed in Section 6.7.1.
The division of two intervals is defined by,
[x][y]
= [x] · 1[y]
(6.14)
and can therefore be computed using relation (6.12) and (6.13).
82

6.1. Interval Analysis Chapter 6. Interval ODE Integration
6.1.2 Interval Algebraic Properties
Interval arithmetic has algebraic properties similar to real numbers. A short overview of themost important properties is presented in this section.
Addition and multiplication are associative,
[x] + ([y] + [z]) = ([x] + [y]) + [z] (6.15)
[x]([y][z]) = ([x][y])[z] (6.16)
and also commutative,[x] + [y] = [y] + [x] (6.17)
[x][y] = [y][x] (6.18)
although not always distributive, for example,
[1, 2] · (1− 1) = [0, 0] = 0 (6.19)
[1, 2] · 1− [1, 2] · 1 = [−1, 1] 6= 0 (6.20)
This means that interval functions are not uniquely defined; the resulting bounds depend onthe form of the function. Some particular useful cases were distributivity does hold are,
x([y] + [z]) = x[y] + x[z] (6.21)
[x]([y] + [z]) = [x][y] + [x][y] if [y][z] > 0 (6.22)
However, the following algebraic property always holds,
[x]([y] + [z]) ⊆ [x][y] + [x][z] (6.23)
This property is called subdistributivity and implies that if we rearrange an intervalexpression, we may obtain tighter bounds (smaller interval) on the range of the expressionor function [113].
6.1.3 Inclusion Monotonic Interval Extensions of Functions
An interval extension of function f is an interval valued function F of n interval variables[x]1, ..., [x]n, with the property,
F (x1, ..., xn) = f(x1, ..., xn) (6.24)
So an interval extension of f is an interval valued function which has real values when thearguments are all real and coincides with f .
F is an inclusion monotonic interval extension of f when,
f([x]1, ..., [x]n) ⊆ F ([x]1, ..., [x]n) (6.25)
This means that an inclusion monotonic interval extension F gives bounds on the functionwhen the function variables are within the intervals [x]1, ..., [x]n.
All rational functions (the function can be expressed as a ratio of two polynomials) havenatural inclusion monotonic interval extensions; we only have to replace the real variableswith interval variables and real arithmetic operations with interval arithmetic operations.
83

6.1. Interval Analysis Chapter 6. Interval ODE Integration
For example (from Moore [112]), consider the polynomial,
p(x) = 1− 5x+13x3 (6.26)
and suppose we want the range of all values of p(x) when x is a number in the range [2, 3],x ⊆ [2, 3]. Then a natural interval extension of p is,
P ([x]) = 1− 5[x] +13
[x] · [x] · [x] (6.27)
Computing P([2,3]),
P ([2, 3]) = 1− 1− 5[2, 3] +13
[8, 27] = [−343, 0] (6.28)
This result means that we have found the range of values of p(x) when x is in [2, 3]. p(x) iscontained in the interval [− 34
3 , 0]We can construct inclusion monotonic interval extensions of all commonly used non-
rational functions. Software tools implementing interval extensions for all common functionsare discussed in Section 6.7.1.
6.1.4 The Dependency Problem
Interval analysis cannot detect multiple occurrences of the same variable. This leads tooverestimation in some cases, as was already noted by Moore. For example, x − x = 0 forall x ∈ [1, 2], but if we evaluate [1, 2]− [1, 2] in interval arithmetic, the result is [−1, 1].
The true solution [0, 0] is contained in the result, but contains a large overestimation.This type of overestimation ”problem” is called the dependency problem.
Writing an interval function in a different form can change the enclosure. It may beuseful to rewrite the function such that the overestimation is reduced, but removing thedependency is not always possible. It can be the cause of significant overestimation andshould always be kept in mind when using interval arithmetic. [112]
Apart from rewriting the interval function, the dependency problem can be reducedby the subdivision strategy described in Section 6.2.4. This method works by dividing theinterval variables in two or more subintervals and combining the result of subinterval compu-tations. The longer computation time is the only disadvantage of this strategy. Computationtime grows roughly linear with the number of n-dimensional subintervals. [114]
6.1.5 Interval Intersections
If the possible positions of two satellites are represented by two intervals, the satellites maycollide if these intervals intersect. We can thus rule out collision if the intervals do notintersect.
The problem of collision determination is thus reduced to determining whether two in-tervals intersect. This is easy if we assume the intervals to be in the same coordinate system.
As an example we take the two 2-dimensional interval vectors [x] and [y],
[x] =[[x1][x2]
][y] =
[[y1][y2]
](6.29)
84

6.1. Interval Analysis Chapter 6. Interval ODE Integration
The intervals [x] and [y] intersect if, and only if, one of the corners of [x] is within [y],
¯y1 ≤ ¯
x1 ≤ y1 and¯y2 ≤ ¯
x2 ≤ y2 or
¯y1 ≤ x1 ≤ y1 and
¯y2 ≤ x2 ≤ y2 or
¯y1 ≤ ¯
x1 ≤ y1 and¯y2 ≤ x2 ≤ y2 or
¯y1 ≤ x1 ≤ y1 and
¯y2 ≤ ¯
x2 ≤ y2
For three dimensional interval vectors, we can determine in a similar way whether the 8corners of vector one are within the box represented by vector two.
[x]
[y]
Figure 6.1: Intersection of two intervals [x] and [y].
85

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
6.2 Interval Taylor Series Methods
We consider the following ordinary differential equation and initial value,
x′(t) = f(x(t)) (6.30)x(t0) = x0
Which can be written in integral form as,
x(t) = x(t0) +∫ t
t0
f(x(τ))dτ (6.31)
x(t0) = x0
We can locally approximate f(x(t)) and use it in the integral form (6.31) if we can find aTaylor polynomial of f(x(t)) about t0. After integrating (6.31), we obtain a new polynomialwhich is the Taylor series approximation of x(t) about t0,
x(t0 + h) = x(t0) + hf(x(t0)) +12!h2f ′(x(t0)) + ...+
1n!hnf (n−1)(x(t0)) +Rn(t) (6.32)
A polynomial can be evaluated on a computer because it involves only elementary alge-braic operations, in contrast with the integral operator. See Chapter 5 for more details onconventional numerical integration using Taylor series.
Interval Taylor Series (ITS) methods are a type of interval integration methods that useTaylor series to construct guaranteed bounds, in interval form, on the solutions of ODEs.It can handle interval initial values [x0], such that x(t0) ⊆ [x0] and interval parameters(constants) in the function f(x(t)) as [cn], such that cn ⊆ [cn].
ITS methods create an inclusion monotonic interval extension of the Taylor polynomialof f(x(t)), to create guaranteed bounds on this polynomial, for interval valued variables andparameters. Because the polynomial can only be evaluated to a finite number of terms, theseries has to be truncated at some term which introduces an error with respect to its truevalue. We call this error the remainder term. This remainder term also has to be boundedfor a guaranteed solution of the ODE.
Moore was the first to publish the idea of interval integration using interval boundedTaylor series in 1966 [111]. Kruckeberg [115], Eijgenraam [101], Lohner [116] and others usedMoore’s ideas and improved his method to solve initial value problems of ODE. Lohner wasthe first to implement his ODE interval integration method in the computer software calledAWA (AnfangsWertAufgabe) in 1989 [102].
Although many mathematicians are interested in the concept of guaranteed integrationover a range of initial values [80], application of the method is limited to simple exampleor benchmark problems such as the mathematical pendulum, double pendulum and Lorenzequations. Mainly because the method is computational more expensive and more complexto implement than conventional integration methods.
6.2.1 Bounding Taylor Series
To create guaranteed bounds on the solutions of IVPs using Taylor series integration, one hasto bound the Taylor polynomial of a single integration step, including the local truncationerror (the remainder, Rn in 6.32). The next step can then use these bounds as initial intervalvalues for the next integration step.
86

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
The global truncation error is thereby propagated, throughout the complete integration,in the initial values of every step. The same is true for the interval initial values andparameters.
In case of the Taylor series method, the local truncation error is the remainder in theTaylor polynomial of x(t) about some point (see Section 5.2.1). To bound the real solutionx(t) for the IVP with interval initial values, we have to find bounds on this polynomial andits remainder term, for interval initial values and parameters.
We also have to bound rounding errors, because the method is used on a computer thatuses finite precision numbers. The remainder and rounding error are both the result of howdigital computers work. The remainder term is the result of the finite evaluation of Taylorseries and the rounding error the result of finite precision numbers used in computers.
Interval Variables and Constants
The Taylor series expansion of x(t) contains the model’s variables and constants. We wantto use interval valued variables and constants and still guarantee bounds. This can be doneby using the inclusion monotonic interval extension (see Section 6.1.3) of the Taylor seriesexpansion of x(t).
This simply means evaluating the polynomial using interval arithmetic and interval vari-ables and constants. The resulting interval bounds the truncated polynomial for the intervalvariables and constants.
However, to bound the infinite Taylor series, we also have to bound the remainder term.
Remainder Term
We take a look at the Taylor polynomial of x(t) in ODE (6.30) about t0,
x(t0 + h) = x(t0) + hf(x(t0)) +12!h2f ′(x(t0)) + ...+
1n!hnf (n−1)(x(t0)) +Rn(t) (6.33)
where Rn(t) is the remainder term which represents all the higher order terms, up to in-finity, that will not be computed. This remainder term is the local truncation error of theintegration method. This subsection shows a method to bound the remainder term.
The exact value of the remainder term can only be found by computing infinite Taylorterms, which is not possible. Luckily, there are methods that bound the remainder term ofTaylor series; the remainder term is guaranteed to be within these bounds, although thesebounds may overestimate the remainder. Conventional methods sometimes estimate theremainder for stepsize control, but never try to bound this error.
The remainder terms can be enclosed by several expressions, the most common is theLagrange form of the remainder term. For the general Taylor series of g(x) about a point a,
g(x) = g(a) + g′(a)(x− a) +g′′(a)
2!(x− a)2 + ...+
g(n)(x(a))n!
(x− a)n +Rn(x) (6.34)
the Langrange remainder is given by,
Rn(x) =gn+1(ξ)(n+ 1)!
hn+1 (6.35)
ξ ∈ [a, x]h = x− a
However, this form is not directly applicable to the autonomous ODE (6.30) becausex(t) is the dependent and t the independent variable. Also note that in the Taylor series
87

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
expansion of the solution x(t), we have x(t) = f(x) so that we can replace gn+1(ξ) in (6.35)with fn(x(ξ)), which yields the following remainder term of (6.33)
Rn(t) =fn(x(ξ))(n+ 1)!
hn+1 (6.36)
ξ ∈ [ti, ti+1]h = ti+1 − ti
In (6.34) we can evaluate the remainder term as long as the time interval and functiong(x) are known. This is, however, not possible for (6.36) because we first need to enclosethe solution x(t) on the interval t ∈ [ti, ti+1], which is what we are already trying to do bybounding the remainder term Rn(t); we need bounds on x(t) to create bounds on x(t).
Therefore, we first need a different way to enclose the solution x(t) on the time interval,before we can bound the remainder term. This ”a priori” enclosure does not need to be tightbecause the new enclosure of x(t) gained from using the a priori enclosure in the remainderterm, can be used again in evaluating the remainder term. This operation can be performediteratively until the bounds do not decrease any more, which occurs for many ODEs afterone iteration [105].
Example (Taylor Remainder Bounds)We want to find bounds on the Taylor remainder for the third order Taylor approxi-mation of x(t) = et about x = 0. The third order Taylor polynomial plus remainderterm is,
x(t) = 1 + t+t2
2!+t3
3!+t4
4!eξ ξ ∈ [0, t] (6.37)
In this case we can simply use ξ = t in eξ as upper bound of the remainder error andξ = 0 as lower bound. This is only possible because et is monotonically increasing;the largest value of t gives the largest value of et. If we have a function that is notmonotonically increasing, we have to find its inclusion monotonic interval extensionand use interval arithmetic to generate bounds on eξ.
Figure 6.2 shows the graph of the Taylor approximation and real function. It alsoshows the graph of the difference between the approximation and real function (thevalue of the remainder term) and the bounds on the remainder term computed byt4
4! eξ with ξ ∈ [0, t].
6.2.2 A Priori Enclosure (Verifying Existence and Uniqueness)
An a priori rough enclosure of the solution is required to bound the remainder term of theTaylor series in (6.36). The a priori bound is found by validating existence and uniquenessof a solution within a certain box, [x], on a certain time interval h = (t1 − t0).
Validating the existence and uniqueness is usually done using the Picard-Lindelof the-orem and Picard iterator, which are results of the Banach fixed-point theorem [117]. Thesetheorems are modified for the interval case and require an initial guess for the enclosure, [x],and stepsize, h, which can be checked for existence and uniqueness using the Picard iteratorin interval arithmetic.
An overview of the important theorems used to prove the a priori enclosure methodis presented below. The full proofs are rather complicated and long, they can be foundin [104], [117] and [118].
88

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
0 0.5 1 1.51
1.5
2
2.5
3
3.5
4
4.5
t
x(t)
0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
t
x(t)
Taylor series approximation
real value
local truncation error
lower error bound
upper error bound
Figure 6.2: Top: Plot of x(t) = et and its 3th order Taylor approximation about x = 0.Bottom: Plot of the difference between the real and approximated solutionand the determined error bounds.
Theorem 6.2.1. (Picard-Lindelof Theorem) [119]
Consider the initial value problem
x′(t) = f(t, x(t)), x(t0) = x0, t ∈ [t0 − α, t0 + α]. (6.38)
Suppose f is Lipschitz continuous in x and continuous in t. Then, for some value ε > 0,there exists a unique solution x(t) to the initial value problem within the range [t0−ε, t0 +ε].
Theorem 6.2.2. (Picard Iteration) [120]
The solution to the IVP in (6.38) is found by constructing recursively a sequence xn(t)∞n=1
of functions,x(t0) = x0
xn+1(t) = x0 +∫ t
t0
f(xn(s))ds (6.39)
Then the solution, x(t), to (6.38) is given by the limit,
x(t) = limn→∞
xn(t)
The interval version of Picard iteration becomes,
89

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
Theorem 6.2.3. (Picard Interval Iteration) [106] [105]
Let [x0] be an inclusion of x0, let [x](t) be an interval vector valued function with continuousbounds, and let [x](t) ⊆ D for t ∈ [t0, t1]. If the inclusion
[x](t) := [x0] +∫ t
t0
f([x](τ))dτ ⊆ [x](t) (6.40)
holds for t ∈ [t0, t1], then a unique solution x∗ exists on this interval and
x∗(t) ∈ [x](t) for t ∈ [t0, t1]
One can check the validity of a constant inclusion without integrating by,
Corollary 6.2.4. (Linear Enclosure) [116]
If the inclusion[x](t) := [x0] + (t− t0)f([x]) ⊆ [x] (6.41)
holds for all t ∈ [t0, t1] with x0 ∈ [x0] ⊆ [x] ⊆ D, then a unique solution x∗ exists on [t0, t1]and
x∗(t) ∈ [x] for t ∈ [t0, t1].
Verifying whether condition (6.41) is true for all t ∈ [t0, t1] can be done using intervalanalysis. We simply replace (t−t0) with the interval [0, h] so that we have a constant intervalenclosure,
Corollary 6.2.5. (Constant Enclosure) [116] [104]
If the inclusion[x] := [x0] + [0, h]f([x]) ⊆ [x] (6.42)
holds with x0 ∈ [x0] ⊆ [x] ⊆ D and h := (t1− t0), then a unique solution x∗ exists on [t0, t1]and
x∗(t) ∈ [x] for t ∈ [t0, t1].
The resulting constant enclosure, [x](t), encloses x(t) on the time interval [t0, t0 + h].With the use of (6.42) we can now create the following computer algorithm to compute
an a priori enclosure. This algorithm is used in the AWA software by Lohner [116].
Algorithm 1 Constant a priori enclosure [105]
1: set [x] := [x0],
2: produce an inflation [x] of [x], i.e. an enlarged interval [x] containing [x] in its interior
3: compute [x] := [x0] + [0, h]f([t0, t1], [x]) ⊆ [x]
4: if [x] ⊆ [x] go to 5. Otherwise, there are two options,a: decrease h and go to 1. orb: go to 2.
5: set [x] := [x]
With a constant or linear a priori enclosure, [x], we can write the remainder term in(6.36) as,
[Rn(t)] =fn([x])(n+ 1)!
hn+1 (6.43)
90

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
The main disadvantage of the constant enclosure method is the allowable stepsize h forwhich the validation can be done using Algorithm 1. This stepsize is limited to a stepappropriate for Euler’s method, no matter how high the order of the method to tightenthe enclosure after an a priori enclosure is found. These enclosure tightening methods usehigh order Taylor polynomial and could use large timesteps if not limited by the stepsizerestriction from the a priori enclosure computation. [105] [104]
Example (A Priori Enclosure)We want to find an a priori enclosure of the following interval initial value problem,
x′ = x2 x(0) ∈ [1, 1.1] (6.44)
We enlarge the initial enclosure and create x ∈ [0.9, 1.2], we then use the constantenclosure method (6.42) to check for which h the enclosure is valid,
[x] = [1, 1.1] + [0, h]([0.9, 1.2]2) ⊆ [0.9, 1.2]
For h = 0.2, x = [1, 1.39] * [0.9, 1.2]. For h = 0.1, x = [1, 1.24] * [0.9, 1.2]. Forh = 0.05, x = [1, 1.17] ⊆ [0.9, 1.2]. This guarantees that the solution of the IVP iscontained within x ∈ [1, 1.17] for h ∈ [0, 0.05].The linear enclosure method (6.41) yields for h = 0.05,
[x] = [1, 1.1] + 0.05([0.9, 1.2]2) = [1.04, 1.17] ⊆ [0.9, 1.2]
Thus a guaranteed enclosure at t = 0.05 is x ∈ [1.04, 1.17]. Figure 6.3 and 6.4 showthe constant enclosure as function of h for the IVP with two sets of initial guesses [x].The constant enclosure, [x], is valid as long as it is enclosed by [x], the straight purplelines. As one can see from these figures, the largest valid h become larger when [x]becomes wider.
Higher Order Enclosure (HEO) can increase the stepsize, but is more complicated toimplement and more difficult to validate the inclusion over the whole interval t ∈ [t0, t1],
Corollary 6.2.6. (High Order Enclosure) [104] [117]
Let x0 ∈ [x0] ⊆ D. Let
[x](t) := [x0] +p∑
n=1
(t− t0)n
n!f([x0])n−1 +
(t− t0)p+1
(p+ 1)!f([x])p ⊆ [x] (6.45)
for t ∈ [t0, t1]. Thenx(t) ∈ [x](t) for t ∈ [t0, t1]
Finding the largest t1 such that (6.45) holds for all t ∈ [t0, t1] is not trivial and computa-tional expensive; it requires rigorous lower bounds for the positive real roots of 2n algebraicequations [117]. However, if
[x](t) := [x0] +p∑
n=1
[0, hn]n!
f([x0])n−1 +[0, hp+1](p+ 1)!
f([x])p ⊆ [x] (6.46)
then (6.45) holds for all t ∈ [t0, t1]. Verifying (6.46) is not difficult and can verify that (6.45)holds for all t ∈ [t0, t1]. Details about the high order enclosure methods and how to findapropriate [x] can be found in papers by Corliss (1996) [ 104 ] and Nedialkov (1999) [ 117 ].
91

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20.8
0.9
1
1.1
1.2
1.3
1.4
1.5
t
x(t)
constant enclosure
constant enclosure
initial guess
initial guess
true max
true min
Figure 6.3: A priori enclosures for the constant interval enclosure method for the differen-tial equation x′(t) = x2(t) with initial value x(0) ∈ [1, 1.1] and x ∈ [0.9, 1.1].A constant enclosure is guaranteed if its width is smaller than the with of theinitial guess. In this case the constant enclosure is true for a time interval[t0, t1 = 0.7].
6.2.3 Interval Integration using Bounded Taylor Series
Taylor series approximate functions and can be integrated analytically due to their elemen-tary algebraic structure, resulting in a new Taylor series. The previous subsections showedhow we can create guaranteed bounds on infinite Taylor series. We can apply this guaranteedenclosure method to the Taylor series of x(t) in (6.30), about a point t, and produce guar-anteed bounds on the solution x(t). If we use interval arithmetic, we also include intervalinitial value [x0] and parameters [c].
Because we work with intervals and interval arithmetic, not all properties of normalarithmetic apply; different ways of evaluating a function may yield different results (intervalsof different width).
Moreover, the bounding of Taylor series is not exact. That is, the bounded solution setcontains the solutions, but also empty points. These empty points or ”non-solutions” arecarried through in the next integration step as initial values. This means that more andmore non-solutions are picked up every integration step; the interval bounds on the solutionset become a large overestimation of the real solution set.
This subsection presents the two basic ways of evaluating the Taylor series of x(t);Moore’s Direct method and the Mean Value method. The last subsection goes into de-tails about reducing the wrapping effect, the most prominent cause of overestimation.
92

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
t
x(t)
constant enclosure
constant enclosure
initial guess
initial guess
true max
true min
Figure 6.4: A priori enclosures for the constant interval enclosure method for the differen-tial equation x′(t) = x2(t) with initial value x(0) ∈ [1, 1.1] and x ∈ [0.7, 1.4].A constant enclosure is guaranteed if its width is smaller than the with of theinitial guess (The red lines have to stay within the purple lines). In this casethe constant enclosure is true for a time interval [t0, t = 0.15].
Moore’s Direct Method
Section 6.2.1 explained how Taylor series are bounded by using the inclusion monotonicfunction extension of f , an a priori enclosure in the Lagrange remainder term of Taylorseries and bounds on the rounding error.
In short, Moore’s direct method uses these bounded Taylor series to bound the solutionof ODEs with interval initial values and parameters. The method generates the intervalenclosure,
[x1] = [x0] +p∑
n=1
1n!hnfn−1([x0]) + [Rn] (6.47)
with,
[Rn] =hp+1
(p+ 1)!fp([x]) (6.48)
wherex(t) ∈ [x] for t ∈ [t0, t1].
andx(t1) ∈ [x1] (6.49)
The interval Taylor coefficients in (6.47) can be computed using automatic differentiation(see Section 6.6). An a priori enclosure, [x] for t ∈ [t0, t1], follows from a method in Section6.2.2. This a priori enclosure can be used to compute the remainder term, [Rn].
93

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
The result is an enclosure of the solution [x1] at time t1 = t0 + h. This procedure canbe repeated for next steps in the integration where the previous enclosed solution becomesthe initial values of the next step.
If we have computed an enclosure [x1] of the solution [x(t1)], we can improve the constanta priori enclosure on [t0, t1] a posteriori by,
[xnew] := [x] ∩ ([x0] + [0, h]f([x])) ∩ (([x1]− [0, h]f([x])) (6.50)
Using this new interval vector, we can improve the Taylor remainder term. This procedurecan be iterated, but does generally not improve after a single iteration. [105]
Moore’s direct method evaluates (6.47) ”directly”; all intervals are inserted into (6.47)and computed using interval arithmetic. This method is width increasing (the enclosuresbecome larger every step),
w([x1]) = w([x0]) +p∑
n=1
1n!hnw(fn−1([x0])) + w([Rn]) ≥ w([x0]) (6.51)
since in interval arithmetic w([x]± [y]) = w([x]) + w([y]).Alefeld and Herzberger showed in 1983 [121] that the mean value form of (6.47) often
yields tighter enclosures than Moore’s direct method. For wide intervals the form mayactually give wider bounding intervals than the natural form [112].
Mean Value Method
The following mean value theorem can modify (6.47) such that sharper and width decreasingbounds can be created,
Theorem 6.2.7. (Mean Value Theorem)Let f : [a, b]→ R be a continuous function on the closed interval [a, b], and differentiable onthe open interval (a, b), where a < b. Then there exists some c in (a, b) such that,
f(b) = f(a) + f ′(c)(b− a) (6.52)
The interval mean value form follows directly from the mean value theorem [112] [122],
Theorem 6.2.8. (Interval Mean Value Theorem)Let f : [b]→ R be continuous differentiable on the interval [b]. Then for any y, a ∈ [b],
f(y) ∈ fM ([b], a) = f(a) + f ′([b])([b]− a) (6.53)
Using this interval mean value form, we can write (6.47) as,
x(t1) ⊆ [x1] = x0 +p∑
n=1
hn
n!f (n−1)(x0) +
h(p+1)
(p+ 1)!fp([x])
(6.54)
+
(I +
p∑n=1
hn
n!J(f (n−1); [x0])
)([x0]− x0)
where [x] is the a priori enclosure of x(t) for all t ∈ [t0, t1] and J(f (n−1); [x0]) the Jacobianof f (n−1) evaluated in interval arithmetic at [x0],
94

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
J =
∂f1
∂x1· · · ∂f1
∂xn...
. . ....
∂fm∂x1
· · · ∂fm∂xn
(6.55)
where fi and xi are the i-th element of the m-dimensional vector function f(x(t)) and n-dimensional state x. The Jacobian can be computed using Automatic Differentiation (seeSection 6.6) [123] [117].
We choose x0 to be the midpoint of [x0], m([x0]). We introduce the convenient notationused by Nedialkov [117],
[v1] = m([x0]) +p∑
n=1
hn
n!f (n−1)(m([x0])) +
h(p+1)
(p+ 1)!fp([x]) and (6.56)
[S0] = I +p∑
n=1
hn
n!J(f (n−1); [x0]) (6.57)
So that we can write (6.54) as,
[x1] = [v1] + [S0]([x0],m([x0])) (6.58)
[x1] can now be smaller than [x0] if the remainder term Rn is small enough and the diagonalelements of J are negative [105] [117].
We can again take subsequent integration steps by using the enclosed solution of theprevious step as the interval initial value in the next integration step. Algorithm 2 describesthe mean value interval method.
Algorithm 2 Direct Mean Value Interval Method [105]
Input: h, [x0], [x],m([x0])
1: [v1] = m([x0]) +∑pn=1
hn
n! f(n−1)(m([x0])) + hp+1
(p+1)!fp([x])
2: [S0] = I +∑pn=1
hn
n! J(f (n−1); [x0])
3: [x1] = [v1] + [S0]([x0],m([x0]))
4: m([x1]) = m([v1])
Output: [x1],m([x1])
6.2.4 Reducing the Wrapping Effect
One dimensional intervals can be seen as lines parallel to the coordinate axis. A two di-mensional interval vector is a rectangle and a three dimensional vector is a box with sidesparallel to the (perpendicular) coordinate axis. Figure 6.5 gives a graphical representationof the following one, two and three dimensional interval vectors in a Cartesian coordinate
95

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
system,
intvec1 = [x] intvec2 =[[x][y]
]intvec3 =
[x][y][z]
(6.59)
[x] = [3, 7] [y] = [3, 7] [z] = [3, 7] (6.60)
0 2 4 6 8 100
2
4
6
8
10
x
y
0 2 4 6 8 100
2
4
6
8
10
x
y
0 2 4 6 8 10 05
100
2
4
6
8
10
zx
y
Figure 6.5: Graphical representation of a one, two and three dimensional interval vectors.
The solution set of an ODE with interval initial values is generally not a rectangle (orbox etc.), which means that interval enclosures of solutions contain points that are not partof the solution set. These extra points are used as initial values in the next integration stepand introduce a larger solution set than the true solution set. This already larger solutionsset has to be bounded again in a rectangle which contains new empty points. This causesan increasing overestimation of the solution set and is called the ”wrapping effect”. [112]
The wrapping effect can be illustrated by Moore’s example [111], we take the followingsystem of differential equations,
x′1 = x2
x′2 = −x1 (6.61)
The solution, with initial value x0 is given by x(t) = A(t)x0, where,
A(t) =[
cos t sin t− sin t cos t
](6.62)
With interval initial value x0 ∈ [x0], the interval vector [x0] can be viewed as a rectanglein the (x1, x2) plane. At t1, [x0] is mapped by A(t1) into a rectangle of the same size (seeFigure 6.6). If we want to enclose the rotated rectangle in an interval vector, we have towrap it in another rectangle with sides parallel to the x1 and x2 axis (a new interval vector,[x1]). This interval is lager. In the next integration step, the larger rectangle is rotatedagain and has to be enclosed in an even larger rectangle (a rotated box only fits in a largerbox). This means that the enclosing rectangle (interval vector) becomes larger and larger,while the true solution set A(t)x0|x0 ∈ [x0], t > t0 remains a rectangle of the same size.
Therefore, the interval vector enclosing the solution at some time t contains extra pointsnot in the solution resulting from [x0]. This phenomenon happens for all flows not parallel to
96

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
the coordinate system. The wrapping effect is the major problem in interval integration andcauses bounds to blow up and make solutions useless. For the above example the solutionbounds are inflated by a factor e2π ≈ 535 for a stepsize going to zero.
Moore [112] already suggested a few ways to reduce the wrapping effect and many othersdeveloped new wrapping reduction methods after him. Although the wrapping effect isinherent to interval enclosures, there are a few effective ways to reduce it. The most commonare subdivision, the parallelepiped and QR-factorization method; these three are presentedin the next sections.
Nevertheless, reducing the wrapping effect for interval methods is always limited by thefact that the interval enclosure sets are convex. A set is convex if for every pair of pointswithin the set, every point on the straight line segment that joins them is also within theset. For non-linear ODEs the solution is a non-convex set that cannot be contained ina convex set without overestimation; ”any interval wrap must be at least as large as theconvex hull of the solution” [99].
No method is best for all IVPs and it is difficult to tell without trying which method willbe best at reducing the wrapping effect for a new problem.
Figure 6.6: Wrapping of a rectangle specified by the interval vector ([−1, 1], [10, 11])T .Source: Nedialkov [123]
Subdivision
Subdivision is the division of intervals in subintervals and evaluating each subinterval sep-arately. The wrapping and dependency problem are reduced by subdivision because manysmall intervals can more accurately describe a solution set than a single large interval. Thatis, separate intervals can more accurately describe a non-convex set than one interval.
There are two types of subdivison strategies [114]. The first divides the initial interval in
97

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
smaller subintervals at the beginning of the method and work with these subintervals to theend.
The second strategy divides the initial interval in subintervals just before the evaluation ofthe variational part, (6.55), which produces the wrapping, then recombining the subintervalsin one interval after the evaluation. This strategy has the lowest impact on computationaltime.
A problem with subdivision is its linear increase of computational time with the numberof subintervals. The good thing about this problem is that it is easily parallelized and cantherefore run on multiple CPUs at the same time. This means that with enough CPUs,results do not take longer compared to using a single interval.
Coordinate Transformation (Lohner’s Method)
Moore was the first to notice the wrapping problem in 1965 [124]. He also mentioned a way toreduce the wrapping effect by performing a local coordinate transformation in the directionof the flow.
Instead of using a box enclosure, [xj ], defined by the unit vectors of the original coordinatesystem, we can also represent the solution as a single point with a locally transformed intervalbox around it [123],
[xj ] = m([xj ]) +Aj [rj ] (6.63)where Aj is transformation matrix and [rj ] an interval vector.
Lohner [117] developed a method to determine rj and m([xj ]) in (6.63) for the ITS methodwhen Aj is given. Aj is, for example, determined by the parallelepiped or QR-factorizationmethod discussed in the following subsections. He introduced the following notation basedon Algorithm 2,
[zj+1] =hp+1
(p+ 1)!fp([x]) (6.64)
sj+1 = m([zj+1]) (6.65)
m([xj+1]) = m([xj ]) +p∑
n=1
hn
n!f (n−1)(m([xj ])) + sj+1 (6.66)
[Sj ] = I +p∑
n=1
hn
n!J(f (n−1); [xj ]) (6.67)
A0 = I (6.68)[r0] = [x0]−m([x0]) (6.69)
From (6.54) and the above notations, we obtain,
x(t1) ∈ [x1] = m([x1]) + ([S0]A0)[r0] + [z1]− s1
[x1] = m([x1]) +A1[r1]
[r1] = (A−11 ([S0]A0))[r0] +A−1
1 ([z1]− s1)
where A1 is non-singular.The next integration step now becomes,
x(t2) ∈ [x2] = m([x2]) + ([S1]A1)[r1] + [z2]− s2
[x2] = m([x2]) +A2[r2]
[r2] = (A−12 ([S1]A1))[r1] +A−1
2 ([z2]− s2)
98

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
Continuing this process results in Lohner’s Method, see Algorithm 3.
Algorithm 3 Lohner’s Method [117]
Input: h, [x0], [x],m([x0]), A0, [r0]
1: [z1] = hp+1
(p+1)!fp([x])
2: s1 = m([z1])
3: m([x1]) = m([x0]) +∑pn=1
hn
n! f(n−1)(m([x0])) + s1
4: [S0] = I +∑pn=1
hn
n! J(f (n−1); [x0])
5: Choose A1 by the parallelepiped or QR method, see below.
6: [x1] = m([x1]) + ([S0]A0)[r0] + [z1]− s1
7: [r1] = (A−11 ([S0]A1))[r0] +A−1
1 ([z1]− s1)
Output: [x1],m([x1]), A1, [r1]
Two common ways to select Aj are the parallelepiped and QR-factorization method. Theparallelepiped method uses a local transformation to a non-orthogonal coordinate system;Aj [rj ] is a parallelepiped. The QR-factorization method uses a local rotation transforma-tion to a different orthogonal coordinate system; Aj [rj ] is a rotated box. Although theparallelepiped method often gives tighter enclosures, Ai can become singular which makesverified inversion of Aj impossible. [125] [99]
More information about the reducing the wrapping effect can be found in [117] [125] [114] [126] [99] [123] [105]
and [127].
Parallelepiped
We obtain the parallelepiped method from Lohner’s method (Algorithm 3) if [117],
Aj+1 = m([Sj ]Aj) (6.70)
where [Sj ] is defined by (6.67).”In the parallelepiped method, the flow of the ODE at intermediate time steps is enclosed
by parallelepipeds instead of rectangular boxes. This choice is motivated by the shape of theflow of a linear ODE with interval initial values, which is a parallelepiped at any time.” [99]
The only source of overestimation for a linear flow and the parallelepiped method, arethe truncation and rounding errors. This means that this method is as tight as possible forlinear ODEs. For non-linear ODE’s, like orbital equations of motion, the wrapping reductiondepends on the specific ODE.
The problem with the parallelepiped method is the transformation matrix Aj whichbecomes singular after some time. The results is impossible matrix inverses. This breakdownof the parallelepiped method is a rule rather than an exception for most ODEs.
A verified way to compute the inverse of Aj can be found in [114].
QR-factorization
To solve the problem of inverting a singular matrix in the parallelepiped method, Lohnerstabilized the iteration by orthogonalization of the matrices, so that the algebraic problemof inverting the matrices is reduced to taking the transpose. [114] [99] [128] [105]
99

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
Let Aj+1 ∈ [Sj ]Aj and let Aj+1 = Aj+1Pj+1, where Pj+1 is a permutation matrix. Apermutation matrix is a square binary matrix that has exactly one entry 1 in each row andeach column and 0’s elsewhere. Each such matrix represents a specific permutation of melements and, when used to multiply another matrix, can produce that permutation in therows or columns of the other matrix; Pj+1 rearranges the columns of Aj+1
We perform the QR-factorization Aj+1 = Qj+1Rj+1, where Qj+1 is an orthogonal matrixand Rj+1 an upper triangular matrix. If Aj+1 in Algorithm 3 is chosen to be Qj+1, we havethe QR-factorization method for reducing the wrapping effect.
QR factorization (also called a QR decomposition) decomposes a matrix A in a uppertriangular matrix, R and a orthogonal matrix, Q. There are several algorithms to computeQ and R, such as the Gram-Schmidt algorithm, Householder transformations, or Givensrotations. Here we only present the modified Gram-Schmidt algorithm [129],
A =[a1 A2
]Q =
[q1 Q2
]R =
[r11 R12
0 R22
]And thus, [
a1 A2
]=[q1 Q2
] [r11 R12
0 R22
]=[q1r11 q1R12 +Q2R22
](6.71)
where,
r11 = ||a1||
q1 =(
1r11
)a1
R12 = qT1 A2
Q2R22 = A2 − q1R12
The matrix Qj+1 introduces an orthogonal coordinate system, where the axis corre-sponding to the first column of Qj+1 is parallel to the first column of Aj+1. We expecta tighter enclosure if the first column of Qj+1 is parallel to the longest edge of the paral-lelepiped Aj+1[rj + 1] than to a shorter edge. Pj+1 should therefore be chosen such thatthe first column of Aj+1 corresponds to the longest edge, then the second longest and so on.An eigenvalue type stability analysis shows that the QR method provides good stability forinterval methods. [117] [128] [130]
Figure 6.7 shows the resulting enclosures after QR-factorization. One along the shortestaxis and one along the longest axis of the parallelepiped.
100

6.2. Interval Taylor Series Methods Chapter 6. Interval ODE Integration
Figure 6.7: Visualization of inclusion sets using Lohner’s QR-factorization method. (a)The set r|r ∈ [r]. (b) Ar|r ∈ [r] enclosed by A[r]. (c) Ar|r ∈ [r] enclosedin the coordinate system induced by Q. (d) (Q−1A)r|r ∈ [r] enclosed byQ−1A[r]. (e) Ar|r ∈ [r] enclosed in the coordinate system induced by Q. (f)(Q−1A)r|r ∈ [r] enclosed by (Q−1A)[r]. Source: Nedialkov [117]
101

6.3. Taylor Model Methods Chapter 6. Interval ODE Integration
6.3 Taylor Model Methods
Taylor Model (TM) methods use symbolic propagation of a (symbolic) initial value setto relate initial values to the final solution. It uses an interval remainder term to boundtruncation and rounding errors. While Taylor Models use interval analysis for the truncationand rounding errors, it does not use interval arithmetic to propagate the initial value set inintermediate interval boxes.
Taylor Models are developed by Makino and Berz, initially to analyse the stability ofparticles in particle accelerators [107] [108]. TM are a combination of Differential Algebras [131]
and Interval Arithmetic. Taylor Models are very general and can be used to analyse a widerange of dynamical systems. In this chapter we only discuss the application of TM methodsto verified ODE integration. Makino and Berz created the software tool COSY Infinity [109]
that implements their method.The main difference between ITS and TM methods is their way of determining the
dependency between initial values and the solution set. Taylor Model methods also useTaylor series expansion for the numerical integration of the differential equations, but expressthe interval initial values in symbols. The solution set, after one integration step, is thus afunction of symbolic initial values, a and b,
x(t1, a, b) ⊆ TM | a ∈ [amin, amax], b ∈ [bmin, bmax] (6.72)
This symbolic solution set is used as initial values for the next integration step until thefinal integration time is reached. The example in Section 6.3.4 will make this more clear.
This in contrast with ITS methods that describe the bounds on the initial values, in-termediate solutions and final solution in numerical intervals instead of symbolic TaylorModels.
Taylor Model methods, however, do also use interval arithmetic to bound truncationand rounding errors, although they use slightly different ways to bound the Taylor seriestruncation error and to reduce the wrapping effect.
The major advantage of TM over ITS methods is the avoidance of large part of thewrapping effect due to the symbolic propagation of the initial value set. Since intervalarithmetic is only used for the remainder term, the wrapping effect occurs in the often smallinterval remainder term only. This results in sharper bounds.
The disadvantages are its computational cost and the representation of the solutionsset. Taylor Models are up to 50 times slower than ITS methods [117]. Furthermore, the TMrepresentation of the solutions set is more complex than an interval representation. Thisgenerates sharper non-convex sets, but makes it harder to determine whether an element(point) is contained in the set. Although a single point can be easily checked using rootfinders, the intersection between two Taylor Model sets is much more difficult to compute.
As far as the author knows, no method can guarantee that two Taylor Model sets do or donot intersect without wrapping the TM in a convex enclosure. This is a major disadvantagewhen using Taylor Models in guaranteed collision avoidance. However, the final Taylor Modelsolution set can be wrapped in an interval by using interval arithmetic. This adaptationdoes increase overestimation, but makes it easier to check for intersecting solutions. We willcall this method the Hybrid Taylor-Interval method and is explained in Section 6.3.5.
The next subsections present the general TM algorithm description, the methods toreduce the wrapping effect and an example to clarify the method. More information aboutTaylor Model methods can be found in [132] [99] [133] [134] [135] [136] [137] [138] [139] [114] and [140].
102

6.3. Taylor Model Methods Chapter 6. Interval ODE Integration
6.3.1 Taylor Models
In contrast with ITS methods, the basic data type for TM is not an interval but a ”TaylorModel”. A Taylor Model consists of a polynomial, P , and interval, [R], part,
TM := P + [R] (6.73)
Also denoted as, TM = (P, [R]).The polynomial part is the Taylor series expansion of finite order n and the interval part
contains truncation and rounding errors and depends on the algorithm used to compute it.Any function that can be represented on a computer and is continuously differentiable canbe modelled (bounded) by a Taylor Model.
Just like interval arithmetic describes mathematical operations for intervals, TaylorModel arithmetic (part of Remainder-enhanced Differential Algebra developed by Berz andMakino [108]) defines operations for Taylor Models. Taylor Model arithmetic can be used tocompute the Taylor models of complex functions by combinations of simple Taylor models.Addition and subtraction, for example, can be obtained by,
TMg ± TMf = (Pg + Pf , [Rg]± [Rf ])
Intrinsic functions, derivative and anti-derivative are also defined within Remainder-enhancedDifferential Algebra and can be found in [108] and [131].
6.3.2 Verified ODE Integration
Makino and Berz developed TM and TM arithmetic for a wide variety of applications includ-ing the verified solution of explicit and implicit ODEs, but also the more general DifferentialAlgebraic Equations (DEA) [136],
f
(dx
dt, x, y, t
)= 0
This generality, however, makes it difficult for engineers and scientist outside the field ofTaylor models to apply the method to a specific problem. As Neher notes ”the sometimescursory description of technical details of Taylor model arithmetic, may be obvious to theexperts of Taylor models, but are less trivial to others.” [99].
This section provides a discussion of its application to the ODE,
d
dtx(t) = f(x(t), t) (6.74)
The algorithm to compute the remainder term of the truncated Taylor series for theTaylor model method is similar to the one for the Interval Taylor method. It uses Schrauder’sand Banach’s fixed point theorem to prove existence and uniqueness of a solution.
We introduce the Banach operator A(),
A(g)(t) = x0 +∫ t
t0
f(g(s), s)ds (6.75)
So a general function g is transformed into a new function via the insertion into f andsubsequent integration.
The problem of finding a solution to the differential equations is now reduced to a fixed-point problem,
x = A(x) (6.76)
103

6.3. Taylor Model Methods Chapter 6. Interval ODE Integration
Schauder’s fixed point theorem can now be used to obtain a Taylor Model for the solutiondescribing the dependency on the initial conditions,
Theorem 6.3.1. (Schauder’s fixed point theorem) [141]
Let A be a continuous operator on the Banach space X. Let M ⊂ X be compact and convex,and let A(M) ⊂ M . Then A has a fixed point in M , i.e. there is an x ∈ M such thatA(x) = x.
One can find such an M in 3 steps [141],
1. Determine a family Y of subsets of X from which to draw candidates for the set M .The sets in Y have to be compact and convex and they should be contained in a TaylorModel.
2. Construct an initial set M0 ∈ Y that satisfies the inclusion property A(M0) ⊂M0. Allrequirements of the fixed point theorem are satisfied and the existence of a solution inM0 is verified. M0 is a Taylor Model inclusion of a solution of the ODE.
3. Iteratively reduce the set M0 to obtain a bound that is as sharp as possible; Mi =A(Mi−1).
The problem now boils down to finding a Taylor Model P + [R] such that,
A(P + [R]) ⊂ P + [R] (6.77)
where we want the remainder interval, [R], to be as small as possible. This means finding aTaylor Model with small [R] that still contains the solution. This lead Makino and Berz totry sets M∗ of the form,
M∗ = MPn(x,t)+[R∗] (6.78)
where Pn(x, t) is the n-th order Taylor expansion in time and initial values of the solution,and [R∗] an interval remainder term.
Pn(x, t) is the approximation of the solution on the time interval [t0, t]. This quantitycan be obtained by iteration of (6.75). Set P (0)
n (x, t) = I, I is the identity function, theniterate,
P (k+1)n = A(P (k)
n ) (6.79)
Next we try to find an [R] such that,
A(Pn(x, t)) + [R∗]) ⊂ Pn(x, t)) + [R∗] (6.80)
which is the inclusion property for Schauder’s theorem.Once such an inclusion has been determined, a solution of the ODE is contained in the
Taylor Model: Pn(x, t)) + [R∗]. [141] [142] [99]
With the initial values sets a ∈ [amin, amax] and b ∈ [bmin, bmax], the solution set, interms of a and b can be written as,
x(te, a, b) ⊆ TM := P (te, a, b) + [R](te) | a ∈ [amin, amax], b ∈ [bmin, bmax] (6.81)
6.3.3 Reducing the Wrapping Effect
The wrapping effect (see Section 6.2.4) is already greatly reduced by enclosing only theremainder term by an interval [R]. However, this interval can still grow out of bounds forlong integration times. Berz and Makino introduced two methods to further reduce thewrapping effect of the interval remainder term; Shrink Wrapping and Preconditioning [99].
104

6.3. Taylor Model Methods Chapter 6. Interval ODE Integration
Shrink Wrapping
Shrink Wrapping absorbs (part) of the interval remainder term in the symbolic polynomialpart of the Taylor Model, P , by modifying the polynomial’s coefficients.
The polynomial and interval part of the TM are wrapped in a new, but pure polynomial,TM. This TM has an interval part of zero now. This new set may be larger than the originalset, but is less prone to wrapping in successive integration steps and to the dependencyproblem.
Shrink Wrapping is performed when the interval part of the TM becomes larger than aspecified value. It resembles the parallelepiped method. By multiplying the non-constantcoefficients of the Taylor polynomial, for linear autonomous ODEs, the interval term isabsorbed as in the parallelepiped method.
Shrink Wrapping uses the same linear map as the parallelepiped method and has the sameproblems as the parallelepiped method discussed in Section 6.2.4. Preconditioning stabilizesthe integration process that became unstable due to the Shrink Wrapping. [99] [143] [144] [132] [145]
Preconditioning
Preconditioning aims at maintaining a small condition number for the shrink wrapping map.It thereby stabilizes the integration process, like the QR factorization method does for theITS method.
Preconditioning also uses a factorization into two Taylor Models; only one Taylor Modelis used for the continuation of the integration, just as in the QR method. It is a coordinatetransformation that is more suitable for continuing the integration, just like the QR andparallelepiped method,.
For preconditioning Taylor models, a large variety of well-conditioned transformations ispossible. The optimal choice is still an open question for future research.
Both shrink wrapping and preconditioning are implement in the TM software madeby Berz and Makino, COSY Infinity. See Section 6.7.3 for more information about thissoftware. [144] [99] [132] [145]
6.3.4 Example
Example (Propagation of Symbolic Initial Values)Consider the first order interval initial value problem,
x = y2, x(0) = −1 + b (6.82)y = x, y(0) = 1 + a (6.83)a, b ∈ [−0.05, 0.05] (6.84)
where the interval initial values are given symbolically; a and b are intervals around the refer-ence initial values. This representation is equal to interval initial values x(0) ∈ [−1.05,−0.95]and y(0) ∈ [0.95, 1.05]. The third order Taylor series expansion of x(t) and y(t) about t = 0,
x(t0 + h, a, b) = 1 + a− h+ bh+h2
2+ ah2 − h3
3+(a2h2
2− ah3
3+bh3
3+
13abh3
)+ [Rx]
y(t0 + h, a, b) = −1 + b+ h+ 2ah+ a2h− h2 − ah2 + bh2 +2h3
3
+(abh2 + ah3 + a2h3 +
a3h3
3− 2bh3
3+b2h3
3
)+ [Ry]
105

6.3. Taylor Model Methods Chapter 6. Interval ODE Integration
The terms between the brackets have a order higher than three because a and b are verysmall compared to the midpoint of the initial values, 1 and -1. These terms are taken intothe remainder interval [R].
We now integrate one step from t0 = 0 to t1 = 0.1,
x(0.1, a, b) = −0.91 + 0.191a+ 0.101a2 + 1.01b+ [Rx]y(0.1, a, b) = 0.9 + 1.01a+ 0.1b+ [Ry]
We again expand x(t) and y(t), but now about t1 = 0.1, using x(0.1, a, b) and y(0.1, a, b) ascalculated above,
x(t1 + h, a, b) = −0.91 + 0.191a+ 0.101a2 + 1.01b+ 818h+ 1.83ah+ 0.181bh− 0.823h2
+ 1.02a2h+ 0.202abh+ 0.01b2h− 0.747ah2 + 0.823bh2 + 0.522h3 + [Rx]
y(t1 + h, a, b) = 0.9 + 1.01a+ 0.1b0.909h+ 0.19ah+ 1.01bh+ 0.409h2
+ 0.1a2h+ 0.914ah2 + 0.0905bh20.274h3 + [Ry]
And again integrate one step, now from t1 = 0.1 to t2 = 0.2,
x(0.2, a, b) = 0.835 + 0.365a+ 1.04b+ 0.202a2 + 0.0202ab+ 0.001b2 + [Rx]
y(0.2, a, b) = 0.818 + 1.04a+ 0.202b+ 0.01a2 + [Ry]
This process is repeated until the required integration time is reached. The solution of theinterval IVP at time t = 0.2 (6.82) is contained in the set,
(x(0.2, a, b), y(0.2, a, b)|a, b ∈ [−0.05, 0.05]
This solution set without remainder, and thus not guaranteed, is shown in Figure 6.8.Although the set looks like a parallelogram, it has slightly curved edges and can thereforenot be represented by an interval vector. Only the initial values are a square around areference point that can be represented by an interval vector, the sets become multivariatepolynomials after a single integration step. This can be clearly seen in the solutions setsplotted in Figure 6.9, which shows solutions sets at time intervals of 0.2.
106

6.3. Taylor Model Methods Chapter 6. Interval ODE Integration
Figure 6.8: Graphical representation of the solution set of (6.82) at time t = 0.2 withoutremainder (non-verified). The edges are slightly curved.
Figure 6.9: Graphical representation of flow of (6.82). Source: Neher [132].
107

6.3. Taylor Model Methods Chapter 6. Interval ODE Integration
6.3.5 Interval Evaluation of Taylor Model Solutions
Interval evaluation of Taylor Models encloses (or wraps) the TM in an interval. This maybe useful when we need intervals to work with. To easily check whether two trajectoryenclosures intersect, for example. To enclose a TM in an interval, we simply have to evaluatethe TM using interval arithmetic.
If we have the following TM, without remainder term, from Section 6.3.4,
(x(0.2, a, b), y(0.2, a, b)|a, b ∈ [−0.05, 0.05]
where,
x(0.2, a, b) = 0.835 + 0.365a+ 1.04b+ 0.202a2 + 0.0202ab+ 0.001b2
y(0.2, a, b) = 0.818 + 1.04a+ 0.202b+ 0.01a2
We can wrap this TM by evaluating x(0.2, a, b) and y(0.2, a, b) using interval arithmeticwhere a and b are the intervals [a] = [b] = [−0.05, 0.05],
x(0.2, [a], [b]) = 0.835 + 0.365[−0.05, 0.05] + 1.04[−0.05, 0.05] + 0.202[−0.05, 0.05]2
+ 0.0202[−0.05, 0.05][−0.05, 0.05] + 0.001[−0.05, 0.05]2 = [−0.905,−0.764]
y(0.2, [a], [b]) = 0.818 + 1.04[−0.05, 0.05] + 0.202[−0.05, 0.05] + 0.01[−0.05, 0.05]2 = [0.76, 0.88]
So that we obtain an interval vector [x] that encloses the TM,
[x] =[
[0.76, 0.88][−0.91,−0.77]
](6.85)
Which can be seen from Figure (6.8) to enclose the Taylor Model for the example att = 0.2.
108

6.4. Interval Runge-Kutta Methods Chapter 6. Interval ODE Integration
6.4 Interval Runge-Kutta Methods
Runge-Kutta (RK) methods are the most popular conventional integration methods (seeSection 5.2.3). They are, however, mainly used for their high efficiency and low complexityand not because the error can be bounded easily, which is a requirement for interval inte-gration. The conventional application of Runge-Kutta methods rarely focusses on, or evendiscusses, the quality of the solution (the size of the error) and often simply assumes thatthe solution is the true solution [146].
Moreover, the only regularly used error analysis is a local truncation error estimation bytaking the difference between a n-th and (n+ 1)-th RK method. However, for many safetycritical systems and optimization problems, this estimation is not enough and guaranteedsolution sets are required.
Finding guaranteed bounds for the truncation errors in RK methods is not easy andprone to errors due to its complexity. Only a few papers provide a proof for the boundsof RK methods and only a single application of these verified error bounds was found inliterature [146].
Almost all interval integration methods use Taylor series instead of RK because theremainder of Taylor series is easier to bound than RK methods. Other advantages or dis-advantages of ITS Taylor series over RK methods in interval integration may also exist,but no good comparison between RK and Taylor interval integration methods was found inliterature.
A guaranteed local truncation error bound was first given by Bieberbach in 1951 [147],his method was improved by Lotkin in the same year [148], Carr provided a way to boundthe global error by propagating local truncation errors in 1958 [149]. A more recent methodwith computer implementation is given by Bouissou and Martel in 2006 [146].
Other work on interval RK methods have been published by Marciniak, Szyszka andGajda between 1999 and 2008 [110] [150] [151].They bounded the solution of the chaotic Lorenzequations using their Guaranteed Runge-Kutta Library (GRKlib) and compared it withdifferent Taylor series methods.
Although their method showed promising results, little information about their methodand no follow-up studies were found. This makes the error bounding of RK methods inter-esting for further mathematical development, but Taylor series methods are still preferredfor applied interval integration in real world problems because they are more developed andverified. The following, and last, part of this subsection gives an overview of Bouissou andMartels method for bounding the errors in a RK integration.
We consider the system of ODEs with initial values,
x(t) = f(x(t)) x(t0) ∈ [x0] (6.86)
where [x0] is an interval initial value. We now use the following notation for the values ofxn to distinguish between different errors,
xvn is the real value at step n.xvn+1 is the real value at step n+ 1.xn is the numerically integrated value at step n.xn+1 is the numerically integrated value at step n+ 1.xrn+1 is the numerically integrated value at step n+ 1 without rounding errors.x∗n+1 is the numerically integrated step n+ 1 if we had started from xvn, no rounding errors.
Figure 6.10 gives a graphical representation of the different definitions and corresponding
109

6.4. Interval Runge-Kutta Methods Chapter 6. Interval ODE Integration
Figure 6.10: Three kinds of errors. Source: Bouissou, 2006 [146].
introduced errors. The errors can now be described as the differences between the abovevariables,
χn+1 = yvn+1 − y∗n+1, the propagated error.ηn+1 = y∗n+1 − yrn+1 the local truncation error.en+1 = yrn+1 − yn+1, the rounding error.εn+1 = yvn+1 − yn+1, the total error.
The bounds on these errors are intervals and will be denoted by [χn+1], [ηn+1], [en+1] and [εn+1].These errors are given by the following relations,
ηn+1 ∈d4f
dt4(x([tn, xt+1]; tn, xvn))− d5φn
dt5([tn, xt+1]) (6.87)
χn+1 ∈ J(ψn, yvn + [εn]) · [εn] (6.88)
[εn+1] = [ηn+1] + [χn+1] + [en+1] (6.89)
where φn(tn+1) = y∗n+1, ψn(yn) = yrn+1 and J the jacobian matrix of ψn evaluated atyvn + [εn].
To reduce the wrapping effect, Bouissou and Martels used Lohner’s QR factorization (seeSection 6.2.4), a method that is also frequently used in ITS methods. The main differencebetween the GRKlib method and ITS methods is how the local truncation error is bounded.The method also differs from basic interval integration methods in that it only uses intervalarithmetic for the errors and uses conventional floating point numbers for the integration.
110

6.5. Bounding Rounding Errors Chapter 6. Interval ODE Integration
6.5 Bounding Rounding Errors
The main point of verified ODE integration is to provide guaranteed bounds on ODE solu-tions. The previous sections show in detail how it can be mathematically proven (guaran-teed) that a solution exists and is unique within the bounds provided by different verifiedODE integration methods. Because these methods are implemented on a finite precisioncomputer, it should also take rounding errors into account; rounding errors should also bebounded. Bounding rounding errors is trivial and easily implemented, but should not beforgotten as it makes the methods discussed in previous sections non-guaranteed; the prooffails when rounding errors are not bounded.
The interval [x] = [¯x, x] may not be representable on a finite precision computer if
¯x and
x are not finite numbers. On a computer¯x and x must be rounded and the default is usually
rounding to the nearest representable number. A rounded interval in this way, [xr], may notbound the original interval [x]. In order that [xr] ∈ [x],
¯x must be rounded downward and
x must be rounded upward, which is called outward rounding.The IEEE 754 standard for floating point arithmetic [152] has four rounding modes, near-
est, round down, round up and round towards zero, thereby making interval arithmeticpossible on essentially all current computers. [153]
The interval software tools discussed in Section 6.7.3 all have outward rounding imple-mented. The overestimation and increase of interval widths is very small and insignificantto the wrapping effect and dependency problem that cause overestimation in interval ODEintegration, as long as double precision (64bit) floating point numbers are used.
111

6.6. Automatic Interval Differentiation Chapter 6. Interval ODE Integration
6.6 Automatic Interval Differentiation
”Automatic Differentiation (AD) is a set of techniques based on the mechanical applica-tion of the chain rule to obtain derivatives of a function given as a computer program.” [154]
Every computer program uses basic elementary arithmetic operations such as additionand multiplication. By dividing a complex function in small parts and applying the chainrule of derivative calculus recursively to these operations, we can automatically computederivatives of arbitrary order, accurate to working precision (only rounding errors). Whenwe combine AD with interval arithmetic, rounding errors and interval variables can be usedto bound the derivatives. A good introduction was published by Rall and Corliss in 1996 [155].
Conventional differentiation methods are symbolic differentiation and finite differencenumerical differentiation. Symbolic differentiation is slow and requires large amounts ofmemory for high order derivatives. Numerical methods are only approximations and containtruncation errors.
AD is a fast and precise method to calculate total and partial derivatives of complicatedfunctions at certain points. The use of derivatives in scientific computing is limited due tothe misunderstanding that precise derivatives are hard to obtain. Numerical differentiationis used, but is not precise and can lead to inaccurate results. AD can be used to obtain highorder Taylor series and can therefore replace Runge Kutta and other methods that avoidhigh order derivatives at the cost of accuracy. [156]
The first two subsections give a short summary of conventional differentiation methods;finite difference numerical methods and symbolic methods. The last subsection discusseshow to obtain high order Taylor coefficients using AD. AD software tools are discussed inSection 6.6.
6.6.1 Finite Difference Numerical Differentiation
This section is a based on the sections about numerical differentiation in the books onnumerical calculus by Stoer [79], Butcher [80], Hoffman [81] and Vuik [82].
The simplest method to approximate the first derivative of a function f(x) is to useNewton’s finite difference approximation,
f ′(x) ≈ f(x+ h)− f(x)h
(6.90)
As h approaches zero, the approximation becomes closer and closer to the tangent lineto the function f(x) at point x. Since we cannot let h go to zero on computers, we alwayshave an approximation of the true derivative. Even if we make h very small on computers,we introduce large rounding errors so we cannot use extremely small h.
Higher order methods for the first and higher derivatives exist. These require morefunction evaluations, but are generally more accurate. An example of a second order methodis,
f ′(x) ≈ 3f(x) + 4f(x+ h)− f(x+ 2h)2h
(6.91)
and an example for the second derivative,
f ′′(x) ≈ f(x+ h)− 2f(x)− f(x− h)h2
(6.92)
The advantage of finite difference approximations is that it only requires function eval-uations of f(x) to approximate its derivatives. The disadvantage is that it yields approxi-mations only.
112

6.6. Automatic Interval Differentiation Chapter 6. Interval ODE Integration
6.6.2 Symbolic Differentiation
Symbolic Differentiation (SD) uses the same differentiation techniques as AD, but it neveruses numerical values and always leaves the derivatives in symbolic form. Symbolic differ-entiation has some advantages and disadvantages over automatic differentiation.
The advantage of SD over AD is that SD is exact (no rounding errors), general (not eval-uated at a certain value of the function variables) and symbolic (more options for qualitativeanalysis).
The major disadvantages are the computation time and memory requirements for higherorder derivatives. Derivatives are expressed in lower order derivatives, which makes mostderivatives exponentially increase in length/complexity with higher order. This does nothappen with AD because lower order derivatives are evaluated for given function variablesand only a single floating point value (or interval value) represents the lower order derivative.
Maple and Mathematica are mathematical software environments that can do symbolic(analytical) differentiation. The symbolic Maple engine is also available as a MATLABtoolbox and can thus also be used in MATLAB.
Example (Symbolic Differentiation with Mathematica)
f = ex sin(x)
df
dx= ex sin(x) sin(x) + xex sin(x) cos(x)
d2f
dx2= x2ex sin(x) cos2(x) + ex sin(x) sin2(x)− xex sin(x) sin(x)
+ 2ex sin(x) cos(x) + 2xex sin(x) sin(x) cos(x)
d3f
dx3= x3ex sin(x) cos3(x) + 3x2ex sin(x) sin(x) cos2(x)− 3x2ex sin(x) sin(x) cos(x)
+ ex sin(x) sin3(x)− 3xex sin(x) sin2(x)− 3ex sin(x) sin(x) + 6xex sin(x) cos2(x)
+ 3xex sin(x) sin2(x) cos(x)− xex sin(x) cos(x) + 6ex sin(x) sin(x) cos(x)
6.6.3 Interval Taylor Coefficients using Automatic Differentiation
Interval integration, in contrast with conventional integration, requires that the error termof the integration method can be bounded. Taylor series integration is rarely used in con-ventional integration because it requires explicit derivatives up to high order, instead of onlyfunction evaluations, to approximate the derivatives.
However, the error term in Taylor series can be easily bounded and are therefore usefulin interval integration. This, however, does require the determination of the derivatives ofthe (force) function, f(x(t)) in (6.30), up to high order, which is often stated as computa-tional intensive, complex and prone to errors [112]. And is the reason why Runge-Kutta likeintegration methods are used in conventional integration.
According to R. Moore [112], however, the general notion about its computational inten-sity is not correct and general algorithms can be developed to find numeric, but exact, Taylor
113

6.6. Automatic Interval Differentiation Chapter 6. Interval ODE Integration
coefficients of a wide range of functions. Such algorithms for the automatic determinationof the Taylor series coefficients (function derivatives) in a recursive way are discussed in thissection. Today this method called automatic differentiation.
We consider the system of first order differential equations,
d
dtx(t) = f(x(t)) (6.93)
for which the Taylor polynomial,
f(x(t)) = f(x(ti)) + f ′(x(ti))h+f ′′(x(ti))
2!h2 + ...+
f (n)(x(ti))n!
hn +Rn (6.94)
approximates f(x(t)) in the neighbourhood of t = ti. Here, h = (t−ti) and Rn the remainderterm. We now define Taylor coefficients for f(x(t)) as,
cfn(ti) =f (n)(ti)n!
n ≥ 0 (6.95)
Such that (6.94) can be written as,
f(ti + h) = cf0(ti) + cf1(ti)h+ cf2(ti)h2...+ cfn(ti)hn +Rn (6.96)
Or in short,
f(ti + h) =N−1∑n=0
cfn(ti)hn +Rn (6.97)
To explicitly solve (6.93) for x(t), we substitute (6.94) in (6.93) and integrate over timefrom ti to t which yields,
x(ti + h) = x(ti) + hf(x(ti)) +12!h2f ′(x(ti)) + ...+
1n!hnf (n−1)(x(ti)) +Rn (6.98)
We can now define Taylor coefficients for x(t) as,
cxn(ti) =x(n)(ti)n!
n ≥ 0 (6.99)
such that (6.98) can be written as,
x(ti + h) =N−1∑n=0
cxn(ti)hn +RN (6.100)
From (6.99) we find that,x′(ti) = cx1(ti) (6.101)
and,
cxn =1nc(cx1)n−1 (6.102)
where,
c(cx1)n−1 =1
(n− 1)!d(n−1)cx1(ti)dt(n−1)
=cx
(n−1)1 (ti)
(n− 1)!(6.103)
now we use from (6.93) that,x′(t) = cx1(t) = f(x(t)) (6.104)
114

6.6. Automatic Interval Differentiation Chapter 6. Interval ODE Integration
so that we can use,
cxn =1ncfn−1(t) n ≥ 1 (6.105)
to compute cxn(t), the Taylor coefficients for x(t), if we can recursively analyse the deriva-tives of f(x(t)) in cfn.
The computation of the Taylor coefficients for cfn is possible for most functions bysplitting the function f(x(t)) in elementary operations. Let u and v be analytical functionsof t in the neighbourhood of t = ti. The following arithmetic operations of the Taylorcoefficients of u and v hold,
c(u+ v)n = cun + cvn (6.106)
c(u− v)n = cun − cvn (6.107)
c(uv)n =n∑j=0
cujcvn−j (6.108)
c(u/v)n =1v
cun − n∑j=1
cujc(u/v)n−j
(6.109)
And the following elementary functions,
c(ua)n =1u
n−1∑j=0
(a− n(a+ 1)
kcun−jc(ua)j
)(6.110)
c(sinu)n =1n
n−1∑j=0
(j + 1)c(cosu)n−1−jcuj+1 (6.111)
c(cosu)n = − 1n
n−1∑j=0
(j + 1)c(sinu)n−1−jcuj+1 (6.112)
The above relations make it possible to compute an arbitrary number of Taylor coefficientswhich make very precise approximations or long integration steps possible.
115

6.6. Automatic Interval Differentiation Chapter 6. Interval ODE Integration
Example (Automatic Differentiation)
We use the following simple first order ODE to give an example of the recur-sive calculation of the Taylor coefficients of x(t),
dx
dt= sin(t) x(0) = 0 (6.113)
The analytical solution is given by,
x(t) = x(0) +∫ t
0
sin(t)dt = x(0) + 1− cos(t) (6.114)
Moreover, the symbolic computation of the Taylor coefficients of x(t) is also simplein this case and does not increase in complexity for higher order derivatives. Thismakes it easy to check the recursive method.
The recursive (numeric) computation of cxn(ti) is done by using (6.111) and(6.112) to derive the Taylor coefficients for sin(t), c(sin(ti))n, and (6.105) to computethe Taylor coefficients for x(t), cxn. Table 6.1 shows the symbolic Taylor coefficients,their values for t = ti and the recursively computed values.
The resulting approximation of x(t) about t = 0 and the deviation from thereal solution, for a Taylor polynomial of order 100, is shown in Figure 6.11. Thisfigure shows that, for this periodic example, three periods can be approximated in asingle integration step before the error grows larger than 2 × 10−9. This in contrastwith a typical fourth order integration method that can approximate only 1/400 of aperiod before the error becomes larger than 2× 10−9.
Table 6.1: Analytical and AD derived Taylor coefficients for the solution of the differentialequation x′(t) = sin(t) about t = ti.
n cxn(ti) cxn(0) analytic cxn(0) recursive0 x(ti) 0 01 sin(ti) 0 02 1
2!cos(ti)
12! 0.500000000000000
3 − 13!
sin(ti) 0 04 − 1
4!cos(ti) - 1
4! -0.0416666666666675 1
5!sin(ti) 0 0
6 16!
cos(ti)16! 0.001388888888889
7 − 17!
sin(ti) 0 08 − 1
8!cos(ti) - 1
8! -0.0000248015873029 1
9!sin(ti) 0 0
10 110!
cos(ti)1
10! 0.000000275573192
If we can use the procedure described above to compute the floating point Taylor coef-ficients of f(x(t)), we can easily find the interval Taylor coefficients since only elementaryalgebraic operations are used. We therefore simply perform the computations in interval
116

6.6. Automatic Interval Differentiation Chapter 6. Interval ODE Integration
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
t
x(t)
0 2 4 6 8 10 12 14 16 18 20−1.5
−1
−0.5
0
0.5
1
1.5
x 10−9
t
x(t)
Figure 6.11: Top: The solution to IVP 6.113. Bottom: The difference between the truesolution and the Taylor series approximation of order 100 about t = 0.
117

6.7. Software Chapter 6. Interval ODE Integration
arithmetic with F ([x](t)) instead of f(x(t)). This completes the procedure of the computa-tion of the interval Taylor coefficients of f(x(t)).
6.7 Software
This chapter presents an overview of existing software that can be used for interval ODEintegration. Chapter 6.7.1 presents interval arithmetic software, Section 6.7.2 automaticdifferentiation tools and Section 6.7.3 interval integration software. Some of these tools willbe used for a collision avoidance system.
6.7.1 Interval Arithmetic
Interval arithmetic software tools provide a way to do interval computations (see Section6.1.1) instead of fixed point arithmetic. The available tools differ in their language support,speed, rounding methods and floating point precision. This section gives an overview ofavailable interval arithmetic tools and gives a comparison of the tools for use in intervalODE integration.
The University of Texas at El Paso has an on-line catalog of interval software that pro-vides a good overview of all available interval related software [157]. Most interval arithmeticsoftware is written in C, C++ or MATLAB. The following subsections give the most com-monly used C++ and MATLAB tools.
C/C++
The most commonly used C++ (or C++ frontend) interval tools are PROFIL/BIAS [158],CGAL [159], Filib++ [160], MPFI [161] and BOOST [162]. They are all free for non-commercialuse. Sun also has a fast and accurate interval library, SUN Forte C++, but is commercialand non free and will therefore not be discussed. [163]
PROFIL/BIAS and CGAL only handle double precision floating point numbers, whileFilib++, MPFI and BOOST can also do long double precision numbers. Other differencesbetween the methods are in the methods they use to round, handle infinite values (extendedinterval arithmetic) and the ability to use integers instead of floating point numbers. [164]
BOOST is made to emulate all the above mentioned tools without sacrificing the pre-cision, validity and speed of the computations [163]. BOOST is therefore the most flexibletools, but is relative new and may be more difficult to implement than one of the othermethods due to the lack of examples and complete documentation.
PROFIL/BIAS is very fast in basic interval operations because it uses hardware effi-ciently. The mathematical functions are slow compared to other tools because it does notuse fast look-up algorithms. However, these look-up tables are less accurate [165]. Whenmore than basic operations are needed, Filib++ is fastest and most accurate according to acomparison by Zilinskas [165]. PROFIL is three to seven times faster than Filib++ in basicoperations, but Filib++ is three to thirty times faster for other functions.
MATLAB
Interval tools for MATLAB are INTLAB [166] and b4m [167]. INTLAB is written in MATLABand the most commonly used tool. b4m (BIAS for MATLAB) is based on BIAS mentionedin the previous subsection. A comparison between the two tools seems not available. Bothwill be sufficient for most applications although they may greatly differ in speed.
118

6.7. Software Chapter 6. Interval ODE Integration
INTLAB is the most updated, used and active tool and is therefore preferred over b4m.Although, users who have worked with BIAS may prefer b4m because it is the MATLABversion of BIAS.
6.7.2 Automatic Differentiation
Section 6.6 gave a short introduction to Automatic Differentiation (AD). AD is used ininterval integration to compute interval Taylor coefficients. This section discusses softwaretools that can be used for AD, and more specific, computing interval Taylor coefficients.
A good overview of different AD software tools for different purposes and programminglanguages can be found on-line at www.autodiff.org.
The next two subsections give a brief overview of available AD software tools for C++and MATLAB. The C++ tools are also compatible with Fortran and other languages thatinterface with C. Most tools are written for C++/Fortran and MATLAB; the most commonscientific computing languages. Python tools are also available.
For computation of interval Taylor series, for use in interval ODE integration, FAD-BAD++ is probably the best C++ tool and INTLAB the best MATLAB tool.
C/C++
There are numerous AD tools written in the C++ language, the most popular are ADIC [168],ADOL-C [169], FADBAD++ (FADBAD/TADIFF) [156] and TAPENADE [170]. All can com-pute higher derivatives of vector functions written in C or C++. The resulting routinescan be called from any other language that can be linked with C, like Fortran and C++.ADOL-C seems to be the most popular in scientific literature with at least 50 publicationsrelated to ADOL-C. All are open source and free for non-commercial purposes.
Only FADBAD++ is known to be able to do AD with respect to interval variables ininterval arithmetic using the C++ interval tool PROFIL/BIAS [171]. Other AD tools maybe modified to use an C++ interval arithmetic package, but this seems unnecessary sinceFADBAD++ can already do that. The only reason to try other AD tools, for example themost popular ADOL-C, is to try to increase computational speed.
MATLAB
TomSym [172] and INTLAB [166] are MATLAB toolboxes that can do AD of high order deriva-tives. INTLAB is an interval arithmetic toolbox that has an integrated AD tool. Thismeans that INTLAB can compute derivatives with respect to interval variables (using inter-val arithmetic). TomSym is not able to do this and INTLAB will therefore be the obviousand probably only MATLAB toolbox for AD with respect to interval variables.
6.7.3 Interval ODE Integration
All major interval ODE integration software tools are mentioned an summarised below. Theoverview includes ITS, TM and RK interval integration methods.
AWA
AWA is the first interval ODE integration software made by Lohner in 1988 [102], written inPASCAL-XCS. AWA is the most used ITS method software available. It has been updatedwith new methods to reduce the wrapping effect and stepsize control a few times since itscreation [132].
119

6.7. Software Chapter 6. Interval ODE Integration
AWA uses a constant a priori enclosure, interval Taylor series and Lohner’s QR factor-ization to create an interval enclosure of ODE solutions. The constant a priori enclosurerestricts the stepsize of AWA to Euler like stepsize. [173]
AWA is used to benchmark new ODE integration tools and is verified by many scientist.It is free for commercial use, although currently not available for download on the originalAWA website. Although updated a few times, the last known update was in 1994 and thelack of a website suggest that AWA is not improved and used anymore. AWA can be usedas a good benchmark for other methods and is sufficient for some problems, but does notuse the latest methods to reduce the wrapping effect and is not able to use larger stepsize.Other tools such as VNODE/VNODE-LP, VSPODE and COSY Infinity are newer toolsthat produce tighter bounds for most problems and are more actively developed and uesd.
ADIODES
ADIODES is created by Stauning in 1997, written in C++. ”It is used to prove existenceand uniqueness of periodic solutions to specific ordinary differential equations occurringin dynamical systems theory. These proofs of existence and uniqueness are difficult orimpossible to obtain using other known methods.” [174]
ADIODES uses a constant a priori enclosure, interval Taylor series and a rotating rect-angular enclosure to create guaranteed bounds; it implements an ITS method. It is im-plemented in C++ and uses PROFIL/BIAS for interval arithmetic and FADBAD++ forautomatic differentiation.
ADIODES has no known published applications besides the examples given by Stauning.Other tools are more popular and developed. This makes the validity of ADIODES uncertainand not a preferred choice for use in real applications.
VNODE/VNODE-LP
VNODE [175] and its updated version VNODE-LP [176] are made by Nedialkov and writtenin C++. VNODE was created in 2001 and its update VNODE-LP in 2006. [177]
VNODE-LP is the update of VNODE completely written in literate programming sothat its correctness can be verified by a human expert, similar to how mathematical proofsare verified [123].
VNODE uses the high order a priori enclosure method which makes larger stepsizespossible, compared to the constant enclosure used in AWA. It uses an interval Hermite-Obreschkoff method that is a generalization of interval Taylor series and is more efficientand produces tighter bounds. Moreover, it also provides the option for an interval Taylorseries method. Lohner’s QR-factorization is used to reduce the wrapping effect. [177]
The VNODE tool has been applied to multi-body simulation, surface intersection, eigen-values, state estimation, shadowing and theoretical computer science [123]. The use of highorder a priori enclosure and the interval Hermite-Obreschkoff results in larger stepsizes andtighter bounds for most problems, compared to AWA.
COSY Infinity
COSY Infinity is a Fortran-based code originally developed by Berz and Makino to study anddesign beam physics systems [109]. The method uses higher order Taylor polynomials withrespect to time and initial values. It is not a true interval ODE integration method becauseit does not return an interval bound. However, the bounds it produces are guaranteed andthe method is part of verified integration. The wrapping effect is reduced by establishingfunctional dependency between initial and final values. [177]
120

6.7. Software Chapter 6. Interval ODE Integration
This method differs from interval Taylor methods like AWA and VNODE in that it doesnot use interval arithmetic to bound solutions. The resulting bounds are thus not intervals,but a set of Taylor series. It only uses interval arithmetic to bound the truncation error.This has the advantage that the wrapping effect is greatly reduced and non-convex boundsare possible that are much better to bound the real solution set.
VSPODE
VSPODE was created by Lin and Stadtherr in 2005 and is written in C++. It was writtento deal with interval parameters instead of the initial initial values most methods focus on.Interval parameters can be treated the same as initial values, but this leads to the wrappingeffect or a significant increase in computational expense that grows exponentially with thenumber of interval parameters. [178]
VSPODE is a hybrid method that uses a combination of ITS and TM methods. VSPODEuses the a priori enclosure method from interval Taylor series, but uses Taylor models withsymbolic propagation of initial values and parameters to tighten the enclosure. The set ofTaylor models is bounded by an interval and used as initial interval in the next integrationstep. This is different from COSY Infinity, where the initial values are symbolically propa-gated through every integration step and the solution set always remains in Taylor modelform with only the remainder term in interval form.
VSPODE uses QR-factorization to reduce the wrapping effect. VSPODE has been testedagainst VNODE and produced tighter enclosures for most non-linear test cases. [179]
GRKLib
GRKLib is a guaranteed Runge Kutta library made by Bouissou and Martel in 2006 [146]. Ituses the conventional Runge Kutta integration method (see Section 5.2.3) instead of Taylorseries, which are used in most verified integration methods.
No details about the methods and no applications can be found in the literature. Themethod used for bounding the truncation error and the implementation should be inde-pendently verified before this method can be applied to real engineering problems. Theadvantage of this method is that it uses a conventional integration method that does notneed high order derivatives and is thus simpler and faster. A disadvantage is the fixed orderof the current implementation to four, although higher order Runge Kutta methods canprobably be implemented in the library.
ValEncIA-IVP
ValEncIA-IVP [180] is a guaranteed ODE solver for IVPs based on a novel method not de-scribed in this chapter. It is made by Rauh and Auer in 2005 and written in C++. Only afew demonstration examples are given by the authors and no other applications are known.
The method ValEncIA-IVP implements, is based on a conventional fixed point numer-ical integration and thereafter a Picard iteration (see Section 6.2.2) to obtain an intervalremainder in which existence and uniqueness is guaranteed [181] [182] [183]. It uses the meanvalue form and monotonicity tests to reduce the wrapping effect. In the double pendulumexample given by the authors, it produces tighter enclosures than VNODE and comparableto COSY Infinity.
The disadvantage of ValEncIA-IVP is the current lack of verification of the method,applications and documentation. If this tool is developed further, it may proof to be a fastand tight enclosure method.
121

6.7. Software Chapter 6. Interval ODE Integration
Comparison
VNODE-LP is the most modern and currently most used ITS software. It is open sourceand free for non-commercial usage. AWA is older and not up to date with the newestwrapping reduction techniques. VNODE-LP is made to improve on AWA and does so formost problems.
COSY Infinity is a mature implementation of the TM method with over 2000 registeredusers. VSPODE also uses the TM methods, but in combination with ITS methods. It is theonly known hybrid method and has shown promising results in a few benchmark problems.
For the collision avoidance system, the VNODE-LP, COSY Infinity and VSPODE soft-ware will be applied and evaluated for the ITS, TM and hybrid method, for the reasonsgiven above.
Table 6.2 provides an overview of all interval integration methods.
Table 6.2: Comparison of interval (verified) integration methods.
Name Integrator Method Year Language ReferenceAWA Taylor series Interval 1988 Pascal-XSC [102]
ADIODES Taylor series Interval 1997 C++ [174]
VNODE Taylor series Interval 2001 C++ [175]
VNODE-LP Taylor series Interval 2006 C++ [176]
VSPODE Taylor series Hybrid 2005 C++ [178]
COSY Infinity Taylor series Taylor 1997 Fortran,C++ IF
[109]
GRKlib Runge Kutta Interval 2006 C++ [146]
ValEncIA-IVP Runge Kutta Interval Jacobian 2005 C++ [180]
122

6.8. Applications Chapter 6. Interval ODE Integration
6.8 Applications
Interval ODE integration can be used to analyse or optimize all dynamical systems that aremodelled by ordinary differential equations.
Critical systems with a high safety requirement can use interval integration to guaranteethat the system will operate within certain limits (no collision, max deflection) for givenuncertainties within the system. It can also be used for sensitivity analyses, where it canreplace Monte Carlo simulations and variational approximations. Or just verify the solutionsobtained from conventional integration methods.
Guaranteed global optimization of dynamical systems is possible with the combinationof interval integration and interval analysis. It is, so far, the only way to guarantee a globaloptimum, although it is still extremely computational expensive for realistic dynamical sys-tems.
Every numerical integration would benefit from the use of interval integration, if only tobound rounding and truncation errors. The disadvantage is the large computational timeand wrapping effect that make the bounds useless after long integration times.
Space applications of interval integration are presented in the first part of this section.The second part presents some other applications of interval integration.
6.8.1 Space
Space related applications of interval integration include the detection of asteroid collisions,low-thrust missions and trajectory optimization.
Asteroid Collision
Berz and Makino were the first to apply an interval integration method to orbit integrationin 2001 [142]. Hoefkens did the same in 2001 [136] and 2003 [143], but compared two intervalintegration methods. Alessi et al. used interval integration to integrate the orbit of asteroidApophis in 2007 [114]
Berz and Makino used their software COSY Infinity that implements the Interval TaylorModel method to integrate the orbit of near Earth asteroid ”1997 XF11” with interval initialvalues. They used an uncertainty of 10−6 AU in the position and velocity of the asteroid andwere able to integrate 3.5 years with a resulting solution set with a size in the order of 10−5
AU. They used a dynamical model that includes all perturbation forces due to the planets,the Moon and a relativistic correction. Not much detail about the models, coordinate setsand implementation used, are given in their paper.
Hoefkens also applied the TM method for the verified integration of asteroid 1997 XF11with interval initial values and physical constants. He notes about the problem, after privatecommunication with Moore, that ”the motion of asteroids in the solar system poses severalchallenges to verified integration methods, mostly due to the large uncertainties in the initialvalues, measured physical constants and strong non-linearity in the mathematical models.Therefore, verified tools have not found widespread application for these problems. How-ever, due to the potential seriousness of the outcome of the integration, they are importantapplications and test cases of verified [integration] methods.” [136].
Hoefkens model includes all planets and a relativistic correction. He uses perturbationmethods (Section 3.4) and Kepler elements because the orbital elements are almost linearfunctions with time, which probably increases the accuracy of the enclosure. He comparesthe implementation of the Interval Taylor Series method in AWA with the implementationof the Taylor Model method in COSY Infinity. Figure 6.12 shows the position enclosure size
123

6.8. Applications Chapter 6. Interval ODE Integration
versus time for AWA and Figure 6.13 and 6.14 the position and velocity enclosure for COSYInfinity. The integrations were started wit a uncertainty of 10−7 AU in position uncertainty.For COSY, the position uncertainty rapidly goes to 10−5 AU and is in the order of 10−4
AU after 10 years of integration. AWA performs worse, although it is up to 50 times faster,and it generates useless bounds after 7 years of integration.
Zazzera et al. [128] compared AWA and VNODE for a great number of different Earthorbits in 2004. AWA performs best for interval initial position and velocity, while VNODEis better for point initial conditions or interval initial position or velocity. They recommendinvestigating Taylor Model methods, which may even be used without interval remainderfor missions where guaranteed bounding is not necessary.
Figure 6.12: Diameter (in AU) of the position enclosure versus time (in years) for as-teroid 1997 XF11 during a 10 year integration interval using AWA. Source:Hoefkens [143].
Alessi et al. (2007) [114] integrated the orbit of asteroid Apophis with an uncertainty inthe initial values of 10−6 AU using the ITS method. They compared the parallelepiped andQR-decomposition methods to reduce the wrapping effect. With a stepsize of 0.625 days,the QR method produced the best results and was able to integrate for 749 days, comparedto 649 days of the parallelepiped method. It is unclear what makes the integration stop, butit is probably because the solutions enclosure becomes too large and the algorithm breaksdown. The QR method produced errors with the inversion of matrices, while this did nothappen in the parallelepiped method.
They conclude their research with important difficulties, requirements for useful orbitintegration and recommendations for future research. The difficulties are the small stepsizesdue to the determination of the rough enclosure, the dependency problem and the wrappingeffect. Small stepsizes cause large computation times. The dependency problem is bestreduced by subdivision (see Section 6.2.4) and the wrapping effect by using subdivision,parallelepiped or QR method.
The successful interval integration requires small initial value intervals, moderate inte-gration times and small wrapping effect. The authors do not give quantitative informationabout these requirements. They do advice to research Taylor Model methods, because thismethod is generally better in dealing with the wrapping effect.
124

6.8. Applications Chapter 6. Interval ODE Integration
Figure 6.13: Diameter (in AU) of the position enclosure versus time (in years) for asteroid1997 XF11 during a 10 year integration interval using Taylor models. Source:Hoefkens [143].
Figure 6.14: Diameter (in AU/TU , TU = year2π ) of the velocity enclosure versus time
(in years) for asteroid 1997 XF11 during a 10 year integration interval usingTaylor models. Source: Hoefkens [143].
Low-thrust Mission
Besides interval integration of an asteroid orbit, Alessi et al. [114] also analysed the useof interval integration for low-thrust missions to escape from Earth. Again, they applied
125

6.8. Applications Chapter 6. Interval ODE Integration
Figure 6.15: In red, the part of trajectory integrated with a first order QRLohner method,about 43 days. In blue, with a first order parallelepiped one, about 9 days.In black, the Earth. An uncertainty in space of 1012 AU and null uncertaintyin the thrust. Unit AU. Source: Alessi et al. [114].
the Interval Taylor Series method with the parallelepiped and QR method to reduce thewrapping effect. They used an uncertainty in the initial position, 10−12 AU, and the thrust,10−9 AU/day2.
With the QR-decomposition method the maximum integration time was 43 days com-pared to 9 days for the parallelepiped method. Figure 6.15 shows the interval trajectoriesof the low thrust spacecraft for different wrapping reduction techniques.
Trajectory Optimization
One of the most useful applications of interval analysis is in global optimization, where thesearch space is divided in intervals. Computing the cost function using interval arithmeticwill yield intervals containing the cost related to a certain part of the search space. Removingthe intervals that certainly do not contain the optimal solution and dividing the remainingsearch space in smaller intervals yields, after recursion, a small interval which containsthe global optimum. Interval optimization is the only generally applicable method thatguarantees a global optimum. [184]
In case of global spacecraft trajectory optimization, the cost function depends, amongothers, on the (integrated) trajectory of the spacecraft. This means that the cost functioncontains an integral, which in turn means that interval integration has to be used if we wantto use interval analysis for the global optimization. The search space is, for example, thepossible initial values. These can be divided into multiple intervals and integrated usingan interval integration method to yield an interval valued cost related to the interval initialvalues.
Although the idea of global trajectory optimization was already mentioned by Moorein 1968 [112] [184], there is almost no literature on the subject. Chu [185] [186] applied intervalanalysis to global optimization of a re-entry trajectory, her efforts were continued by Fil-ipe [187] who noted a significant flaw in Chu’s method. Although Chu used interval analysisto evaluate most of the cost function, she did not use interval integration for the integratedpart. Bounding the solution set for interval initial values was done using normal numerical
126

6.8. Applications Chapter 6. Interval ODE Integration
integration of the upper and lower bounds of the initial values [187].This method is only correct for monotonically increasing or decreasing integrals, which
is generally not the case for the non-linear differential equations of spacecraft trajectories.That said, she notes that, even without using interval integration, the optimization for are-entry trajectory is time consuming and impossible to do globally with modern computers.Moreover, the wrapping and dependency problem resulted in many feasible solutions thatare difficult to distinguish.
Filipe tried to include interval integration in his method to correct and improve Chu’smethod. He used the VNODE-LP (see Section 6.7.3) tool for the interval integration, al-though he identified VSPODE as the most promising interval ODE solver, but did not useit due to his collaboration with ESA who preferred VNODE-LP for unspecified reasons.
Filipe’s results show that global interval optimization is possible, but currently not prac-tical due to the enormous computation time needed for global optimization of several pa-rameters. The wrapping problems causes large overestimates which can only be reduced bychoosing interval initial values of small width. This means that the search space is dividedin a huge amount of intervals and a corresponding number of simulations.
The results of both Chu and Filipe motivated the author to research the most basicand largest problem with global interval trajectory optimization; the interval integrationpart with interval initial values and parameters. Before a complex problem like re-entryoptimization can be solved using interval integration, the interval integration itself has tobe improved and researched to find the best methods that can handle the largest range ofinitial values with the smallest overestimation.
This literature research and the planned scientific computing research are hoped to yieldmore information about the different methods that can be used for global trajectory op-timization and to make a small step towards feasible global trajectory optimization usinginterval analysis.
6.8.2 Other
Besides space applications, interval ODE integration has many possible applications in allengineering and science fields where analysis, optimization or verification of a dynamicalsystems, modelled by ODEs, is required. This section gives a short overview of its applica-tions to particle accelerators, chemical engineering and general optimization of dynamicalsystems.
Particle Accelerators
The Taylor Model method and implementation in the COSY Infinity package were originallyinvented by Berz in 1994 [107], to analyse the stability of particles in particle accelerators likethe Large Hadron Collider (LHC) and Tevatron. Storage rings within these acceleratorsstore (moving) particles that are later injected into the main accelerator ring where theycollide and yield data for particle research.
The particles in the storage rings may collide with the wall, which effectively makes theuse of that particle impossible. Berz method finds six approximate invariants of motion andgive guaranteed bounds on the lifetime of a particle. The method relies on bounding of adeviation function which describes fluctuations of the approximate invariants. This methodis comparable to the method of variation of parameters (see Sections 3.4.2), although thestability analysis differs from any method mentioned in this report.
By also bounding rounding and truncation errors with interval arithmetic, 1 millionstable turns in the PSR II particle storage ring can be guaranteed. However, this requires
127

6.8. Applications Chapter 6. Interval ODE Integration
splitting of intermediate intervals in smaller intervals because otherwise the bounds blow uptoo fast. [188] [189] [107]
Chemcial Engineering
Lin and Stadtherr are scientists at the chemical and biomolecular engineering department ofthe university of Notre Dame. In [178] they published their software implementation of inter-val integration called VSPODE along with a few example problems in chemical engineering.One example is the a microbial growth process in a bio-reactor. The concentrations of thebiomass and substrate and their change are modelled by a set of two first order differentialequations. Using VSPODE, they show that both concentrations can be bounded.
Optimization
As is already explained above, interval analysis is the only general method to find a guar-anteed global optimum. In the optimization of dynamical problems, the optimization oftenalso needs guaranteed interval integration. Interval integration is not yet used in realisticoptimization where interval integration is needed because the wrapping effect becomes toolarge for realistic interval initial values.
With the current wrapping methods, a non-linear problem has to be divided in a verylarge number of sub-intervals. All these sub-intervals have to be integrated using an intervalintegration method. This takes currently too much computational time to be practical.Two types of improvements can make global optimization of dynamical systems feasible;faster computers and better methods to reduce the wrapping effect. Both improvements arepossible and required for global interval optimization. Future research will have to showhow much improvement in both methods and computational speed are required.
128

Chapter 7
Thesis Assignment
This literature survey is a preparatory work for the MSc. Thesis at the Aerospace Engineer-ing faculty of Delft University of Technology. This chapter defines the research question,intermediate objectives and the general methodology to answer and achieve these.
7.1 Research Question
All topics discussed in this literature survey are related to the problem of space collisionavoidance using interval analysis (integration). All necessary information to investigatewhether such an Interval Collision Avoidance System (ICAS) is feasible, is gathered andorganised in this survey. ICAS will use the interval ODE integration methods from chapter6 to guarantee, by mathematical proof under certain assumptions, for two orbiting bodies,
• A: The absence of possibility of collision without intervention, during a specified timeor,
• B: The absence of possibility of collision after a certain orbital maneuver, during aspecified time.
A is the case when the guaranteed bounds on the trajectory of both bodies do not intersect.When they do intersect, case B, collisions may occur and an orbital maneuver has to beperformed to rule out collisions again. Researching the feasibility of such a system is theobjective of the thesis. The thesis research question is therefore defined as:
Is it feasible to use interval analysis to rule out collisions in space?
This question is general and cannot be answered by a simple yes or no. It merely definesthe application and focus of research of interval trajectory integration and the Unified StateModel (USM) (see Chapter 4). A few relevant and important sub-objectives related to theUSM, interval trajectory integration and collision avoidance will be treated while tryingto answer the main question. These intermediate objectives are discussed in the followingsection.
7.2 Objectives
The main objective of this thesis is to answer the above mentioned research question. Inorder to do so, an ICAS will be developed.
129

7.2. Objectives Chapter 7. Thesis Assignment
However, there are also many unknowns about the application of interval integrationand the USM. Important new information about these methods will directly result from theapplication of these methods to space collision avoidance.
The USM has not yet been applied to orbit simulation and comparisons between othermethods like the variation of orbital elements and Cartesian variables do not exist.
For interval integration, there is not yet a complete and useful overview of the quality ofdifferent methods for guaranteed trajectory integration.
The author was introduced to interval analysis by the thesis work of Chu [186] and Fil-ipe [187] who tried to use interval analysis for optimization of dynamical systems (re-entry).Although both made progress in global optimization using interval analysis, Chu did not useinterval integration and Filipe used interval integration but could not reduce the overestima-tion enough for practical applications to re-entry problems (see Section 6.8). Performanceand requirements for global trajectory optimization using interval analysis will be investi-gated and documented to support further research on this topic.
We can put the intermediate objectives in three categories; the USM, interval trajectoryintegration and space collision avoidance:
Unified State Model:
• Research the computational efficiency of the USM compared to Kepler and Cartesianmodels.Which model is most efficient for a certain accuracy?
• Research the tightness and efficiency of the USM in interval trajectory integration.Does the USM yield smaller enclosures than the method of Variation of Orbital Ele-ments or Cartesian variables?
Interval Trajectory Integration:
• Research size and growth of solution enclosures for Interval Taylor Series and TaylorModel methods, applied to trajectory simulation.Which method yields the smallest solution enclosure for orbit integration?
• Research the relation between the interval initial-value enclosure size and the solutionenclosure size. This is important information to determine global trajectory optimiza-tion feasibility.Is global trajectory optimization possible using interval analysis?
• Research the enclosure sizes generated by different dynamical models (USM, variationof orbital elements and Cartesian).Which dynamical orbit model produces the smallest solution enclosures for a certaincomputational effort?
Space Collision Avoidance:
• Research the requirements on the uncertainty in position and velocity, from orbitdetermination, for collision avoidance (Earth satellites and asteroids).How precise do we need to know the position and velocity of space objects for intervalcollision avoidance?
• Research the required computational power for a full scale Space Collision Avoidancesystem with current measurement uncertainties.Is a global ICAS feasible with current computers and measurements?
130

7.3. Computer Implementation Chapter 7. Thesis Assignment
• Research the number of collision avoidance manoeuvres with current measurementuncertainty.How often will satellites need to change orbit because ICAS cannot rule out collisions?Is this worth the risk of collision?
7.3 Computer Implementation
The models and methods described in this literature survey will be implemented, duringthe thesis research, in order to fulfil all objectives stated in the previous section and answerthe research question. Equations of motion, coordinate transformations, reference frames,perturbing forces, integration methods, interval methods and collision detection algorithmswill all be integrated in a single, but modular, ICAS that forms a prototype for an intervalcollision avoidance system.
C++ will be the programming language of choice for ICAS, Matlab will be used for dataanalysis and visualization. There are two reasons for choosing C++. First, most intervalintegration, automatic differentiation and interval analysis software tools are written inC/C++. Four of these tools will be used in ICAS; FADBAD++ PROFIL/BIAS, VNODE-LP, VSPODE and COSY INFINITY. The use and implementation of these open sourceC++ tools in ICAS is the main reason for choosing C++. Second, C++ performs generallyfaster than Matlab and Java for ODE integration.
7.3.1 Software Tools and Libraries
ICAS will use the following tools and libraries. The standard BLAS and LAPACK routinesfor fast linear algebra computations. PROFIL/BIAS for interval analysis. FADBAD++ forautomatic differentiation and TADIFF for automatic differentiation of Taylor coefficients.VNODE-LP, VSPODE and COSY Infinity are used for interval ODE integration and wrap-ping reduction. All the above packages have a C++ interface and are free for non-commercialuse, except for VSPODE for which no information about licence, availability and installationis available. Personal communication with the author is the only way to obtain VSPODE.
The Matlab package INTLAB is an interval library that will be used to verify intervalresults.
7.3.2 Software Requirements
The main requirement of the program is to detect collisions between satellites. It thereforehas to produce an interval trajectory enclosure, check for intersection of two intervals andvalidate its methods by comparison with conventional integration method in combinationwith Monte Carlo simulations.
A dynamical orbit model, an interval integration method, satellite initial data and trans-formations are required to produce an interval trajectory enclosure. All primary softwarerequirements are shown in a requirements tree in Figure 7.1.
7.3.3 Units
Figure 7.2 gives an overview of the different units in the proposed program. The units areput in three different groups; model, viewer and controller. These function as independentparts within the program. The model contains the groups of equations of motion, transfor-mations, integrators, detection methods, etc; the viewer the user interface, data processing
131

7.3. Computer Implementation Chapter 7. Thesis Assignment
Detect Possible Collisions
Produce Interval Position Enclosure
Detect Interval Intersection
Equations of Motion
Perturbing Forces
Integrate Interval Initial
Values
Dynamical Model
Transform Coordinate
Sets
Transform Reference
Frames
Validating Enclosure
Interval Taylor Series
Taylor Model Hybrid
Initial Data
Interval Intersection
Method
Dynamical Model
Conventional Integration
Monte CarloRungeKutta
Initial Data
Taylor Series
Figure 7.1: Software Requirements Discovery Tree.
Controller
3D Cartesian Trajectory Plot
Unified State Model Cartesian Vectors Gauss's Planetary Equations
Select Dynamical Model
Select Output Data
Interval Intersection Plot
Distance Between Two Objects
Conventional Integrators
Runge Kutta Taylor Series (Automatic Differentiation)
Interval Integrators
Interval Taylor Series Taylor Models
Coordinate Transformations
Cartesian, Spherical, Kepler, USM
Reference Frame Transformation
Earth Centered Inertial International Celestial
Collision Detection
Interval Intersection Detection Closest Distance between Orbits
Solar System Data
Position, mass, velocity Planets, Sun and SS Barycenter
Satellite Data
Test scenarios for various Earth orbiting satellites Position, velocity, mass, size, surface area, drag coefficient,
Unified State Model Cartesian Vectors Gauss's Planetary Equations
Equations of Motion
Perturbing Forces
J2 gravity term Major Planets and the Moon Aerodynamic drag
2D “varx vs vary” Plots
Cartesian, Spherical, Kepler, Unified State Variables and Time.
Interval Enclosure Visualization
3D interval plotter Enclosure vs time for all variables
Select Reference Frame
Coordinate set Intervals
Viewer
Position, mass, velocity Atmospheric density model J2 gravity constant
Earth Data
Conventional: RK, Taylor Interval: VNODELP, VSPODE, COSY
Select Integrator
Model
Monte Carlo
Command Line Interface
Figure 7.2: Preliminary software units of the Interval Collision Avoidance System.
132

7.3. Computer Implementation Chapter 7. Thesis Assignment
and visualization; and the controller is the interface between the model and viewer andcontains initial data and event handlers.
The model is the most important and complex part of the program. Its units will bedescribed in the next paragraphs.
Transformations
Transformations between different coordinate sets are necessary for data analysis, to trans-form initial conditions to the variables of the model and to transform intervals to a singlecoordinate set for interval intersection detection.
The coordinate sets used are Cartesian coordinates, Kepler elements and Unified Statevariables. The transformation unit can transform between these sets, in interval analysis.
Transformation between reference frames is generally not required because all simulationsoccur in an inertial Celestial or inertial Earth centred reference frame. A transformationbetween these two references frames is only needed for collision detection between asteroidsand Earth satellites and for comparison with measurement data and to use measurementdata as input. The absence of non-inertial reference frames and the lack of reference frametransformations in general make this part of the transformation unit relatively simple.
Equations of Motion
Different orbital models (coordinate sets) use different equations of motion. The equationsof motion unit returns the variational (or ”force function”) values for for a certain state.
The models used are the USM, Cartesian and Gauss form of Lagrange’s planetary equa-tions (Variation of Kepler elements). All equations of motion have to be evaluated usinginterval analysis. The resulting force is therefore also an interval.
Perturbation Forces
The perturbation forces unit provides the perturbation force due to atmospheric drag and J2
gravity term of the central body. It provides perturbation force components in the directionsrequired for the Cartesian model, Unified State Model and Gauss form of the Planetaryequations (Kepler Elements). The unit has the state variables as input and returns thecorresponding force components. All function can be evaluated in interval arithmetic.
An exponential atmospheric density model simulates the varying atmospheric densitywith altitude.
Integrators
Integrators take initial values, stepsize and integration time as input and return the inte-grated state. An integrator is composed of an equation of motion unit, perturbation unitand an integrator type.
Interval Wrapper
The interval wrapper is a unit that wraps a Taylor Model in an interval. The wrapper hasa Taylor model as input and evaluates the Taylor model in interval arithmetic, using thePROFIL/BIAS library, which yields an interval that encloses the Taylor Model. It uses thetransformation unit to transform between coordinate sets and wrap an interval expressed inone coordinate set in an interval in a second coordinate set.
133

7.3. Computer Implementation Chapter 7. Thesis Assignment
Model
Controller
Viewer
Change Display
Change Model StateUser Input
Status/Data update
Status/Data request
Figure 7.3: Interfaces between the model, viewer and controller components.
Collision Detection
The collision detection unit wants two interval trajectories as input and returns whether,when and where these trajectories intersect. This unit uses the transformation and intervalwrapper unit to compare intervals in different coordinate sets.
Monte Carlo
The Monte Carlo unit generates a large number of initial values for conventional integrationmethods. It pseudo-randomly (based on a probability density function) samples these initialvalues from a given interval. The density functions used are a Gaussian(normal) and uniformdistribution.
In case of a Gaussian distribution within the interval, for example, with the mean in thecentre of the interval, more samples will be drawn around the centre than at the edges of theinterval; the probability density is approximated by the number of samples per unit space.
7.3.4 Interfaces
The model, viewer and controller components of ICAS all operate independently and canonly access and change each other via interfaces between the components. The viewer isdumb and only submits events to the controller. The controller decides what to do withviewer event and gives possible commands to the model. The model follows the controllerinstructions, keeps track of status changes and updates the viewer. The viewer is an observerof the model and receives an update from the model when the model’s status changes andwhen new simulation data are available. The model can also send status and simulationdata on the viewer’s request.
The controller and viewer cannot change any data or functions in the model. The modelitself is internally governed by ICAS model, which is composed of different units. ICASmodelcan instantiate a simulation. This simulation requires simulations options and returns the
134

7.3. Computer Implementation Chapter 7. Thesis Assignment
simulation data to the ICAS model. The internal data and functions of the simulation objectare not accessible from outside.
The user can give commands to ICAS via the viewer component in the form of a commandline interface (or GUI). Simulation settings (integrator type, stepsize, time, initial values,number of integrations, coordinate set, etc) can be set and run. The viewer saves the settingsand sends the commands to the controller which decides on an action and actives the model.
Simulation data is saved in a standard data file which can be imported in Matlab forvisualization and analysis.
7.3.5 Unit Tests
Unit testing is performed to verify the correct implementation of the individual units. Thefollowing unit tests will be performed.
Transformations
Coordinate transformations can be can be verified by comparing the results to manualcomputations. The transformation from Cartesian coordinates to USM variables and backcan also be verified by comparison with Vittaldev’s [78] implementation.
Transformations between reference frames will have to be verified by comparison tomanual calculations and visual inspection of the code. Data of, for example, the Moon canalso be found on NASA’s Horizon website for different reference frames. The transformationsunit should be able to reproduce these data.
Equations of Motion and Perturbation Forces
Both the perturbation forces and equations of motions have to be verified by comparisonwith manual calculations, average values for different perturbing sources from literature andcompared with other implementations. The USM implementation of Vittaldev [78] can, forexample, be used to compare and verify the equations of motion unit for the USM.
Integrators
Integrator units can be verified by integrating differential equations with known analyticalsolutions and comparison with existing integrators like the Matlab ode45 integrator.
Interval integrators can be verified by comparison with each other and with Monte Carlosimulations. The results from the Monte Carlo simulations should all be contained in theinterval enclosure from the interval integration methods.
Collision Detection
Collision detection boils down to interval intersection detection. Interval intersection meth-ods can be verified by visualization of the intervals and visual inspection. Manual calcula-tions can also easily verify the interval intersection unit.
Interval Wrapper
The interval wrapper needs to completely wrap a rotated interval in a new interval. This unitcan be verified by comparing it to manual calculations, visualization and interval intersectionmethods. The interval intersection method can verify that the first interval is completelywrapped in the second.
135

7.3. Computer Implementation Chapter 7. Thesis Assignment
+integrate()
+updateStatus()
-initialValues
-equationsOfMotion
-integrator
-pertForces
-options
Simulator
+createTemplate()
VnodeInt
+createTemplate()
VspodeInt
+createTemplate()
CosyInt
+newIntegration()
+updateViewer()
+checkIntersection()
+transformCoordinates()
+transformReference()
-settings
ICASmodel
+returnValues()
+setForces()
-parameters
-densityModel
PerturbationForce
+returnValues()
EquationsOfMotion
+checkIntersection()
+updateStatus()
-orbitDateOne
-orbitDataTwo
CollisionDetection
+transformCoord()
+transformFrame()
-cart2usm
-cart2kepler
-kepler2cart
-usm2cart
-celestial2earthfix
Tranformations
VNODE-LP
VSPODE
+integrate()
ConvInt
PROFIL/
BIAS
COSY
+integrate()
Integrator
+integrate()
Rk4Int
+integrate()
-order
TaylorInt
FADBAD++
+usmPert()
USMPert
+cartPert()
CartPert
+keplerPert()
KeplerPert
+usmFunction()
USM
+cartFunction()
CartPert
+gaussFunction()
Kepler
+integrate()
Rk8Int
+monteCarloSim()
-gausPDF
-uniformPDF
MonteCarlo
Figure 7.4: Class diagram of the ICAS model component.
The tightness of this wrapping is analysed by visual inspection of the interval aroundthe Taylor Model. Taylor Models can be easily visualized with Mathematica.
7.3.6 Integration
The most important and complex component of ICAS is the model component, ICASmodel.ICASmodel governs simulators, collision detection and transformations. It is continuouslyrunning and waiting for instructions from the controller. It can instantiate single simulatorsthat simulate the orbit of a single satellite. It keeps track of all simulations and their results.
The simulator is composed of equations of motion, perturbation forces and an integrator.The type of equations of motion, perturbation forces and integrator can all be chosen by theICASmodel when initializing a single simulator. Multiple single simulators can be run atthe same time or queued. Once an integrator is finished, it notifies ICASmodel and returnsthe integrated trajectory.
ICASmodel can, next to simulating, also transform data sets into different coordinatesets and reference frames. It can check for collisions with its interval intersection detectionunit.
ICASmodel reports an update to the viewer when the system’s state changes and providesa status update when the viewer requests one. It can only receive instructions from thecontroller.
The class diagram of the model component is shown in Figures 7.4.
136

7.3. Computer Implementation Chapter 7. Thesis Assignment
7.3.7 Verification
Verification of ICAS is necessary to guarantee the program works as intended. Possibleerrors within the program have to be revealed by verification. Individual units are alreadyverified so any errors in the integrated program are the result of erroneous integration orincompatible interfaces.
Verification of the equations of motion, perturbing forces, transformations and conven-tional integrators is mainly done by comparing the ICAS simulation results with othercommonly used trajectory integration models, analytical solution, integration constants andwhen possible with real satellite or asteroid data. The different integrators of ICAS will alsobe compared to easy other.
The results will be compared to simulation data from NASA’s Horizons and other sources.These sources provide thoroughly verified data which can be compared to ICAS. Possibletrajectories to compare are the planets and their moons. NASA’s Horizons does not provideactive satellite ephemeris.
The simulated trajectories will also be compared to real satellite data to see how wellICAS models reality. Space-Track.org [190] provides two line elements (TLE) from the USSpace Surveillance Network. These TLE accuracy is undisclosed, but is thought to be in theorder of kilometers. More accurate special perturbations data is classified and maintainedby the US Air Force.
The collision between Iridium 33 and Cosmos 2251 can be simulated, but only with theinaccurate TLE data. More precise
For some orbits and assumptions, analytical (exact) solutions do exist. These orbitsand assumptions (no perturbation forces in two body problem) can be used in the ICASsimulation which then should yield the analytical solution.
Last, for the unperturbed n-body problem there are constants of motion, like energy andmomentum (see Section 3.1.3). These quantities do not change in our physical models. Thismeans that these quantities should also not change in ICAS, for the same conditions.
The interval integration results can be verified by comparison with existing verified in-terval integration software tools and by Monte Carlo methods (see Section 5.5.1). MonteCarlo methods use a large number of integrations to analyse a system. In case of intervalintegration, all Monte Carlo solutions starting from within the interval initial values shouldbe enclosed by the interval integration methods. If only one point falls outside this enclosure,there have to be errors in the interval integration method.
7.3.8 Parallel Computing
Parallel computing uses many computational independent simultaneous computations, in-stead of serial computations, to increase the computational speed. A single CPU can onlydo serial computations, but a network of CPUs can do parallel computing by all doingindividual serial computations and communicate the results.
Although a single trajectory simulation is not suitable for parallel computing, subdivision(see Section 6.2.4) and optimization require many independent parallel integrations. For verylarge numbers of parallel integrations, relative cheap Graphics Processing Units (GPUs) canbe used for parallel computing (a single GPU has tens to hundreds of cores) may greatlyreduce computational time. Rewriting ICAS for use on NVIDIA GPUs using CUDA (aparallel computing architecture developed by NVIDIA) will be looked into when time allows.
Modern CPUs have two to eight cores. This means that they are suitable for parallelcomputing. They actually only use one core if the software is not specifically programmed
137

7.4. Simulation Chapter 7. Thesis Assignment
to use more than one core. ICAS will be able to run simulations on multiple cores to usethe full potential of modern CPUs.
7.4 Simulation
Implementing and verifying the computer implementation is not sufficient to achieve theabove mentioned objectives and answer the research question; simulations of realistic sit-uations are necessary. The following simulations are planned, all done using Cartesianvariables, variation of orbital elements and the USM; conventional and interval integration(multiple methods) and with different wrapping reduction methods:
• Earth satellites: LEO, MEO, GEO and HEO.
• Near-Earth Asteroids.
• Collision scenarios. Conventional simulation backwards in time from collision situationto pre-collision situation. The pre-collision situation is then integrated using intervalintegration with collision detection.
For these orbits and mentioned orbit models and integration methods, we want to de-termine,
• The size of solution enclosure (interval) for interval integration methods.
• The computational speed.
• The integration time after which interval integration methods break down; the wrap-ping effect becomes extremely large.
7.5 Tasks and Schedule
The MSc. thesis is worth 42 ECTS. 1 ECTS is equal to 28 hours, which means that thethesis should take about 33 weeks of 36 hours per week. Figure 7.5 shows an overview ofall tasks together with a time estimate per task. The blue tasks indicate lower priority thanthe black tasks.
The computer implementation tasks correspond with the units described in Section 7.3.3.Integration tasks in Section 7.3.6, verification tasks in Section 7.3.7 and simulation tasksin Section 7.4. The document related tasks include writing of introduction, conclusion,recommendations and summary, and proof reading and rewriting the thesis.
138

7.5. Tasks and Schedule Chapter 7. Thesis Assignment
ID Task Name Duration
18/10 14/23/125/10
1 135.5dComputer Implementation
2 10dDesign
8 15dEquations of Motion
12 5dPerturbing Forces
5dCoordinate Transformations
5dReference Frames
13 10dConventional Integration
17 2dInterval Analysis
42.5dInterval Integration
30 10dCollision Detection
37dSimulation
15dInterpretation and Visualization
33 15dIntegration & Verification
50 3dUncertainty Requirements
52 3d3D Cartesian trajectory plots
58 30dReport Related
51
16
15
14 2.5dRunge-Kutta (order 4-6)
2.5dTaylor series expansion using AD
5dFADBAD AD implementation
18 1dGetting familiar with PROFIL/BIAS and
INTLAB
20
1dCartesian, Spherical
2dUnified State Variables
2dKepler Elements
9
10
11
5dCartesian Vector
5dGauss’s Planetary Equations
5dUnified State Model
5dCOSY INFINITY implementation
5dVNODE-LP implementation
5dVSPODE implementation
Nov 2009Oct 2009 Jan 2010Dec 2009 Mar 2010Feb 2010
13/12 21/26/1229/1111/10 8/11 20/12 14/324/11/11 27/1215/114/10 31/1 28/217/1 7/210/1 7/322/11
31
5dClosest distance between objects
5dInterval Intersection Detection
26
24 2.5dA priori enclosure
19 1dInterval Automatic Differentiation
5dMean value method
25 5dMoore’s method
27 5dSubdivision
28 10dParallelepiped method
21
23
5dUSM
15dInterval Integration
17dCollision Avoidance
2dCompare vs Cartesian
3dCompare vs Gauss’s planetary equations
(Kepler)
3dCompare Taylor Series and Taylor Model
methods
3dCompare VNODE-LP, VSPODE and COSY
3dCompare wrapping reduction methods
3dCompare USM, Kepler and Cartesian
10dMultiple Earth Satellites on near collision
course
4dNear Earth Asteroid
37
38
41
47
39
40
42
43
44
48
49
34 5dUnit tests
46 3dInterval sizes for optimization
53 3dVariable x vs variable y plot
55 3dInterval Intersection plot
3dInterval Enclosure Visualization
56 3dDistance between two objects
57
29 5dMonte Carlo
36 5dIntegration tests
22
54
45
32
35 5dUnit integration
3
4
5
6
7
21/3
Figure 7.5: Thesis schedule. Blue tasks have lower priority.
139

Appendix A - Transformations
Cartesian Coordinates to Kepler Elements
The transformation from Cartesian position and velocity, x, y, z, x, y, z, to Kepler elements,a, e, i, ω,Ω,M , is given by [50],
r =√x2 + y2 + z2 (1)
V =√x2 + y2 + z2 (2)
a =r
2− rV 2
µ
(3)
e cosE = 1− r
a(4)
e sinE =√
1µa
(xz + yy + zz) (5)
tanθ
2=
√1 + e
1− etan
E
2(6)
τ = t−
√a3
µ(E − e sinE) (7)
H =√µa(1− e2) (8)
i = arccos(xy − yxH
)(9)
sin Ω =yz − zyH sin i
(10)
cos Ω =xz − zxH sin i
(11)
cos(ω + θ) =x
rcos Ω +
y
rsin Ω (12)
M = E − e sinE (13)
140

7.5. Tasks and Schedule Chapter 7. Thesis Assignment
Kepler Elements to Cartesian Coordinates
The transformation from Kepler elements, a, e, i, ω,Ω,M , to Cartesian position and velocity,x, y, z, x, y, z.
First get the eccentric anomaly E from the mean anomaly M and eccentricity e, byiteratively solving Keplers equation [191]. This is commonly done by the simple and effectiveNewton-Raphson root finder,
x1 = x0 −f(x0)f ′(x0)
(14)
For this problem we use for f ,
f(Ei) = Ei − e sinEi −M (15)f ′(Ei) = 1− e cosEi (16)
So that the following iteration converges to the true value of E,
Ei+1 = Ei −Ei − e sinEi −M
1− e cosEi(17)
where E0 = M .Next, we get the position and the velocity in the q-frame, which has its z-axis perpen-
dicular to the orbital plane and its x-axis pointing to the perigee,
q =
a(cosE − e)a√
1− e2 sinE0
(18)
q =na
1− e cosE
− sinE√1− e2 cosE
0
(19)
where n is the mean motion,
n =√
µ
a3(20)
The transformation from inertial frame to the q-frame is performed by the rotation sequenceR3(ω)R1(i)R3(Ω). So, vice versa, the inertial position and velocity are obtained by thereverse transformations,
r = R3(−Ω)R1(−i)R3(−ω)q (21)r = R3(−Ω)R1(−i)R3(−ω)q (22)
(23)
where,
R3(−Ω) =
cos Ω − sin Ω 0sin Ω cos Ω 0
0 0 1
(24)
R1(−i) =
1 0 00 cos i − sin i0 sin i cos i
(25)
R3(−ω) =
cosω − sinω 0sinω cosω 0
0 0 1
(26)
141

7.5. Tasks and Schedule Chapter 7. Thesis Assignment
Cartesian Coordinates to USM variables
The transformation from Cartesian position and velocity, x, y, z, x, y, z, to USM variables,C,Rf1, Rf2, q1, q2, q3, q4, are given by Altman [1],
C =µ
H(27)
Rf1 = −R sin(λ− φ) (28)
Rf2 = R cos(λ− φ) (29)
where,H =
√(yz − zy)2 + (zx− xz)2 + (xy − yx)2 (30)
f = (yz − zy)/H (31)
g = (zx− xz)/H (32)
h = (xy − yx)/H (33)
sin i/2 = +
√(1− h)
2(34)
cos i/2 = +
√(1 + h)
2(35)
sin Ω/2 = ±√
(1− cos Ω)2
(36)
cos Ω/2 = ±√
(1 + cos Ω)2
(37)
sin Ω = f1√
f2 + g2(38)
cos Ω = −g 1√f2 + g2
(39)
sinu/2 = ±√
(1− cosu)2
(40)
cosu/2 = ±√
(1 + cosu)2
(41)
u = sign(z) arccos
((−gX + fY )(f2 + g2)√
x2 + y2 + z2
)(42)
sinλ = sin(Ω + u) (43)
142

7.5. Tasks and Schedule Chapter 7. Thesis Assignment
cosλ = cos(Ω + u) (44)
sinφ =xx+ yy + zz
R√x2 + y2 + z2
(45)
cosφ =µ(x2 + y2 + z2)−
12 − C2
CR(46)
R = +
√(x2 + y2 + z2)− 2µ√
x2 + y2 + z2+ C2 (47)
Quaternion in terms of the Kepler elements (Ω, i, ω, θ),q1
q2
q3
q4
=
sin(i2
)cos(
Ω−u2
)sin(i2
)sin(
Ω−u2
)cos(i2
)sin(
Ω+u2
)cos(i2
)cos(
Ω+u2
) (48)
USM variables to Cartesian Coordinates
The transformation from USM variables, C,Rf1, Rf2, q1, q2, q3, q4, to Cartesian position andvelocity, x, y, z, x, y, z, are given by Altman [1],XY
Z
= [E]T0
r00
(49)
d
dt
XYZ
= [E]T0
ve1ve20
(50)
r =µ
Cve2(51)
[ve1ve2
]=[
0C
]+[
cosλ sinλ− sinλ cosλ
] [Rf1
Rf2
](52)
[sinλcosλ
]=
1(q2
03 + q204)
[2q03q04
q204 − q2
03
](53)
143

Bibliography
[1] Altman, S. P., “A unified state model of orbital trajectory and attitude dynamics,”Celestial Mechanics and Dynamical Astronomy , Vol. 6, No. 4, Dec. 1972, pp. 425–446.
[2] Giorgini, J. D., Benner, L. A., Ostro, S. J., Nolan, M. C., and Busch, M. W., “Predict-ing the Earth encounters of (99942) Apophis,” Icarus, Vol. 193, No. 1, 2008, pp. 119.
[3] of Concerned Scientists, U., “UCS Satellite Database,” 2009.
[4] Verger, F., Sourbs-Verger, I., and Ghirardi, R., The Cambridge Encyclopedia of Space,Cambridge University Press, 1st ed., Aug. 2002.
[5] Wikipedia, “Space station - Wikipedia, the free encyclopedia,”http://en.wikipedia.org/wiki/Space station, 2009.
[6] Abitzsch, S., “Prospects of space tourism,” European Aerospace Congress, 9 th- Vi-sions and Limits of Long-Term Aerospace Developments, Berlin, Germany , 1996, p.99111.
[7] Wikipedia, “Ansari X Prize - Wikipedia, the free encyclopedia,”http://en.wikipedia.org/wiki/Ansari X Prize, 2009.
[8] Wikipedia, “EADS Astrium Space Tourism Project - Wikipedia, the free encyclope-dia,” http://en.wikipedia.org/wiki/EADS Astrium Space Tourism Project, 2009.
[9] “XCOR Aerospace - Liquid fuel rocket engines, pumps composites and spacecraft,”http://www.xcor.com/, 2009.
[10] “Space Exploration Technologies Corporation - Falcon 9,”http://www.spacex.com/falcon9.php, 2009.
[11] “Bigelow Aerospace: Commercial Spacecraft and Complexes - Space Business,”http://www.bigelowaerospace.com/genesis I/, 2009.
[12] Wikipedia, “Space tourism - Wikipedia, the free encyclopedia,”http://en.wikipedia.org/wiki/Space tourism, 2009.
[13] Protecting the Space Shuttle from Meteoroids and Orbital Debris, 1997.
[14] Johnson, N. L., Stansbery, E., Whitlock, D., Abercromby, K., and Shoots, D., “Historyof On-Orbit Satellite Fragmentations,” 2008.
[15] Fukushige, S., Akahoshi, Y., and Kitazawa, Y., “Comparison of Debris EnvironmentModels; ORDEM2000, MASTER2001 and MASTER2005,” IHI Engineering Review ,Vol. 40, No. 1, 2007, pp. 31–41.
144

BIBLIOGRAPHY BIBLIOGRAPHY
[16] Leleux, D. and Spencer, R., “Probability-Based Space Shuttle Collision Avoidance,”2002.
[17] Rossi, A. and Valsecchi, G., “Collision risk against space debris in Earth orbits,”Celestial Mechanics and Dynamical Astronomy , Vol. 95, No. 1, May 2006, pp. 345–356.
[18] “NASA Orbital Debris Program Office Website,” March 2009.
[19] Wright, D., “Space Debris,” Physics Today , Vol. 60, No. 10, 2007.
[20] Kessler, D. J., “Critical Number of Spacecraft in Low Earth Orbit: Using SatelliteFragmentation Data to Evaluate the Stability of the Orbital Debris Environment,”2001.
[21] Liou, J. and Johnson, N. L., “PLANETARY SCIENCE: Risks in Space from OrbitingDebris,” Science, Vol. 311, No. 5759, 2006, pp. 340–341.
[22] de Pater, I. and Lissauer, J. J., Planetary Sciences, Cambridge University Press, 1sted., Dec. 2001.
[23] Murray, C. D. and Dermott, S. F., Solar System Dynamics, Cambridge UniversityPress, Feb. 2000.
[24] Wikipedia, “Asteroid - Wikipedia, the free encyclopedia,”http://en.wikipedia.org/wiki/Asteroid, 2009.
[25] Tedesco, E. F. and Desert, F. X., “The Infrared Space Observatory Deep Aster-oid Search,” ASTRONOMICAL JOURNAL-AMERICAN ASTRONOMICAL SOCI-ETY , Vol. 123, No. 4, 2002, pp. 20702082.
[26] Wikipedia, “Near-Earth object - Wikipedia, the free encyclopedia,”http://en.wikipedia.org/wiki/Near-earth object, 2009.
[27] Wikipedia, “Comet - Wikipedia, the free encyclopedia,”http://en.wikipedia.org/wiki/Comet, 2009.
[28] Wikipedia, “Meteoroid - Wikipedia, the free encyclopedia,”http://en.wikipedia.org/wiki/Meteoroid, 2009.
[29] Kelso, T. S., “Analysis of the 2007 Chinese ASAT Test and the Impact of its Debrison the Space Environment,” Proceedings of the Advanced Maui Optical and SpaceSurveillance Technologies Conference, held in Wailea, Maui, Hawaii, September 12-15, 2007, Ed.: S. Ryan, The Maui Economic Development Board., p. E35 , 2007.
[30] Puffer, R., “The Death of a Satellite : Edwards Air Force Base,” Dec. 2003.
[31] Staff, N., “Response Team Formed to Recover Satellite Debris,” CTV.ca, Feb. 2008.
[32] Grego, L., “A History of Anti-satellite (ASAT) Programs,” Union of Concerned Sci-entists, Oct. 2003.
[33] Iannotta, B., “U.S. Satellite Destroyed in Space Collision,” www.space.com, Feb. 2009.
[34] Jenkin, A. B., “Effect of orbit data quality on the feasibility of collision risk manage-ment,” Journal of Spacecraft and Rockets, Vol. 41, No. 4, 2004, pp. 677–683.
145

BIBLIOGRAPHY BIBLIOGRAPHY
[35] Klinkrad, H., “On-orbit risk reduction-collision avoidance,” Proceedings of the Insti-tution of Mechanical Engineers, Part G: Journal of Aerospace Engineering , Vol. 221,No. 6, 2007, pp. 955–962.
[36] Johnson, N., Christiansen, E., Reynolds, R., Matney, M., Zhang, J. C., Eichler, P., andJackson, A., “NASA/JSC Orbital Debris Models,” Proceedings of the Second EuropeanConference on Space Debris, 1997, pp. 225–232.
[37] Chi, R., Pang, B., Guan, G., Yang, Z., Zhu, Y., and He, M., “Analysis of debrisclouds produced by impact of aluminum spheres with aluminum sheets,” InternationalJournal of Impact Engineering , Vol. 35, No. 12, Dec. 2008, pp. 1465–1472.
[38] Montenbruck, O. and Gill, E., Satellite Orbits: Models, Methods and Applications,Springer, Sept. 2005.
[39] Isoda, K., Sakamoto, T., and Sato, T., “An effective orbit estimation algorithm for aspace debris radar using the quasi-periodicity of the evaluation function,” Antennasand Propagation, 2006. EuCAP 2006. First European Conference on, 2006, pp. 1–6.
[40] Ailor, W., “Space traffic control: a view of the future,” Space Policy , Vol. 18, No. 2,May 2002, pp. 99–105.
[41] Johnson, N. L., “Space traffic management concepts and practices,” Acta Astronau-tica, Vol. 55, No. 3-9, 2004, pp. 803–809.
[42] Ailor, W. H., “Space traffic management: Implementations and implications,” ActaAstronautica, Vol. 58, No. 5, March 2006, pp. 279–286.
[43] Bryner, J., “SPACE.com – Cosmic Clean-Up: Wild Ideas to Sweep Space,”http://www.space.com/businesstechnology/080319-tw-space-debris.html, 2009.
[44] Monroe, D. K., Space debris removal using a high-power ground-based laser , 1993.
[45] Schall, W. O., “Laser Radiation for Cleaning Space Debris from Lower Earth Orbits,”Journal of Spacecraft and Rockets, Vol. 39, No. 1, 2002, pp. 81–91.
[46] Hoyt, R. P. and Forward, R. L., “The Terminator Tether: Autonomous Deorbit ofLEO Spacecraft for Space Debris Mitigation,,” 38th Aerospace Sciences Meeting &Exhibit , 2000, p. 1013.
[47] Forward, R. L., Hoyt, R. P., and Uphoff, C. W., “Terminator Tether TM: a spacecraftdeorbit device,” Journal of Spacecraft and Rockets, Vol. 37, No. 2, 2000, pp. 187196.
[48] Ishige, Y., Kawamoto, S., and Kibe, S., “Study on electrodynamic tether system forspace debris removal,” Acta Astronautica, Vol. 55, No. 11, Dec. 2004, pp. 917–929.
[49] Nishida, S., Kawamoto, S., Okawa, Y., Terui, F., and Kitamura, S., “Space debrisremoval system using a small satellite,” Acta Astronautica, Vol. 65, No. 1-2, July2009, pp. 95–102.
[50] Wakker, K. F., Astrodynamics - Lecture Notes, TU Delft, Aug. 2007.
[51] Battin, R. H., An Introduction to the Mathematics and Methods of Astrodynamics,Revised Edition, AIAA (American Institute of Aeronautics & Ast, rev sub ed., 1999.
[52] Gunter, B., “Time and Reference Systems - Lecture Slides,” 2007.
146

BIBLIOGRAPHY BIBLIOGRAPHY
[53] IERS, “Conventional Celestial Reference System and Frame,” Technical note, IERS,2004.
[54] Observatory, U. N., “ICRS Narrative,” http://aa.usno.navy.mil/faq/docs/ICRS doc.php,2009.
[55] “HORIZONS System,” http://ssd.jpl.nasa.gov/?horizons, 2009.
[56] Torok, J. S., Analytical Mechanics: With an Introduction to Dynamical Systems,Wiley-Interscience, 1st ed., Oct. 1999.
[57] “EGM96: The NASA GSFC and NIMA Joint Geopotential Model,”http://cddis.nasa.gov/926/egm96/egm96.html, 2009.
[58] “Earth Gravitational Model 2008 (EGM2008),” http://earth-info.nga.mil/GandG/wgs84/gravitymod/egm2008/index.html, 2009.
[59] Balmino, G., Barriot, J., Koop, R., Middel, B., Thong, N., and Vermeer, M., “Simu-lation of gravity gradients: a comparison study,” Journal of Geodesy , Vol. 65, No. 4,Dec. 1991, pp. 218–229.
[60] Bilitza, D., “MSIS-E-90 Atmosphere Model,” http://omniweb.gsfc.nasa.gov/vitmo/msis vitmo.html,1991.
[61] Chodas, P., “Application of the extended Kalman filter to several formulations of orbitdetermination,” Tech. rep., Institute for Aerospace Studies and University of Toronto,Toronto, Aug. 1981.
[62] Feynman, R. P., Leighton, R. B., and Sands, M., The Feynman Lectures on Physicsincluding Feynman’s Tips on Physics: The Definitive and Extended Edition, AddisonWesley, 2nd ed., Aug. 2005.
[63] Greene, B., The Fabric of the Cosmos: Space, Time, and the Texture of Reality ,Knopf, 1st ed., Feb. 2004.
[64] Ferris, T., Coming of Age in the Milky Way , Harper Perennial, Aug. 2003.
[65] “CODATA Value: Newtonian constant of gravitation,”http://www.physics.nist.gov/cgi-bin/cuu/Value?bg, 2006.
[66] Altman, S. P., “Velocity-space maps and transforms of tracking observations for orbitaltrajectory state analysis,” Celestial Mechanics and Dynamical Astronomy , Vol. 11,No. 4, Dec. 1975, pp. 405–428.
[67] Verhulst, F., Nonlinear Differential Equations and Dynamical Systems, Springer, April2006.
[68] Butikov, E. I., “The velocity hodograph for an arbitrary Keplerian motion,” EuropeanJournal of Physics, Vol. 21, No. 4, 2000, pp. 297–302.
[69] Wikipedia, “Euler angles - Wikipedia, the free encyclopedia,”http://en.wikipedia.org/wiki/Euler angles, 2009.
[70] Wolfram, “Euler Angles – from Wolfram MathWorld,”http://mathworld.wolfram.com/EulerAngles.html, 2009.
147

BIBLIOGRAPHY BIBLIOGRAPHY
[71] Arfken, G. B. and Weber, H. J., Mathematical Methods for Physicists, Sixth Edition:A Comprehensive Guide, Academic Press, 6th ed., July 2005.
[72] Wolfram, “Rotation Matrix – from Wolfram MathWorld,”http://mathworld.wolfram.com/RotationMatrix.html, 2009.
[73] Hamilton, W. R., “On quaternions,” Proceedings of the Royal Irish Academy , Vol. 3,1847, p. 116.
[74] Chou, J., “Quaternion kinematic and dynamic differential equations,” Robotics andAutomation, IEEE Transactions on, Vol. 8, No. 1, 1992, pp. 53–64.
[75] Kuipers, J. B., Quaternions and rotation sequences, Princeton Univ. Press, 1999.
[76] Wikipedia, “Quaternion - Wikipedia, the free encyclopedia,”http://en.wikipedia.org/wiki/Quaternion, 2009.
[77] Mulder, J., van Staveren, W., de Weerdt, E., and van der Vaart, J., Flight Dynamics(Lecture Notes), TU Delft, Delft, 2007.
[78] Vittaldev, V., “The Unified State Model,” Tech. rep., Delft University of Technology,2009.
[79] Stoer, J. and Bulirsch, R., Introduction to Numerical Analysis, Springer, 3rd ed., Aug.2002.
[80] Butcher, J. C., Numerical Methods for Ordinary Differential Equations, Wiley, 2nded., June 2008.
[81] Hoffman, J. D., Numerical Methods for Engineers and Scientists, Second Edition,,CRC, 2nd ed., May 2001.
[82] Vuik, C., Beek, P., Vermolen, F., and van Kan, J., Numerieke Methoden voor Differ-entiaal Vergelijkingen, VSSD, Delft, 2006.
[83] Boyce, W. E. and DiPrima, R. C., Elementary Differential Equations and BoundaryValue Problems, John Wiley & Sons, Inc, USA, 8th ed., 2005.
[84] Dormand, J. R., EL-MIKKAWY, M. E. A., and Prince, P. J., “High-Order EmbeddedRunge-Kutta-Nystrom Formulae,” IMA J Numer Anal , Vol. 7, No. 4, Oct. 1987,pp. 423–430.
[85] Talman, L. A., “Taylor Polynomials: The Lagrange Error Bound,” May 2008.
[86] Weisstein, “Lagrange Remainder – from Wolfram MathWorld,”http://mathworld.wolfram.com/LagrangeRemainder.html, 2009.
[87] Poffald, E. I., “The Remainder in Taylor’s Formula,” The American MathematicalMonthly , Vol. 97, No. 3, March 1990, pp. 205–213, ArticleType: primary article / Fullpublication date: Mar., 1990 / Copyright 1990 Mathematical Association of America.
[88] Beesack, P. R., “A General Form of the Remainder in Taylor’s Theorem,” TheAmerican Mathematical Monthly , Vol. 73, No. 1, 1966, pp. 64–67, ArticleType: pri-mary article / Full publication date: Jan., 1966 / Copyright 1966 MathematicalAssociation of America.
148

BIBLIOGRAPHY BIBLIOGRAPHY
[89] Wikipedia, “Double precision floating-point format - Wikipedia, the free encyclope-dia,” http://en.wikipedia.org/wiki/Double precision floating-point format, 2009.
[90] Gear, C. W. and Shampine, L. F., “A User’s View of Solving Stiff Ordinary DifferentialEquations,” SIAM Review , Vol. 21, No. 1, 1979, pp. 1–17, ArticleType: primary article/ Full publication date: Jan., 1979 / Copyright 1979 Society for Industrial and AppliedMathematics.
[91] Gear, C. W., Numerical integration of stiff ordinary differential equations,, 1967.
[92] Hairer, E. and Wanner, G., Solving Ordinary Differential Equations II: Stiff andDifferential-Algebraic Problems (Springer Series in Computational Mathematics),Springer, 2nd ed., March 2004.
[93] Wikipedia, “Multivariate Gaussian,” http://commons.wikimedia.org/wiki/File:Multivariate Gaussian.png,2006.
[94] Wikipedia, “Monte Carlo method - Wikipedia, the free encyclopedia,”http://en.wikipedia.org/wiki/Monte Carlo method, 2009.
[95] Ochoa, B. and Belongie, S., “Covariance propagation for guided matching,” Proceed-ings of the Workshop on Statistical Methods in Multi-Image and Video Processing(SMVP), 2006.
[96] Der, G. J. and Danchick, R., “Analytic and numerical error covariance matrix prop-agation (for spacecraft in earth orbital environments),” AIAA/AAS AstrodynamicsConference, San Diego, CA, 1996, pp. 854–878.
[97] Alfriend, K. T., Akella, M. R., Frisbee, J., Foster, J. L., Lee, D., and Wilkins, M.,“Probability of Collision Error Analysis,” Space Debris, Vol. 1, No. 1, March 1999,pp. 21–35.
[98] Matney, M. J., Anz-Meador, P., and Foster, J. L., “Covariance correlations in collisionavoidance probability calculations,” Advances in Space Research, Vol. 34, No. 5, 2004,pp. 1109–1114.
[99] Neher, M., Jackson, K. R., and Nedialkov, N. S., “On Taylor Model Based Integrationof ODEs,” SIAM JOURNAL ON NUMERICAL ANALYSIS , Vol. 45, No. 1, 2007,pp. 236.
[100] Moore, R. E., “Practical Aspects of Interval Computation,” Appl. Math, Vol. 13, 1968,pp. 52–92.
[101] Eijgenraam, P., “The Solution of Initial Value Problems Using Interval Arithmetic.Formulation and Analysis of an Algorithm,” 1981.
[102] Lhner, R., AWA, Software product in FORTRAN-SC for the inclusion of the solutionof ODEs, Karlsruhe, 1989.
[103] Corliss, G. and Chang, Y. F., “Solving Ordinary Differential Equations Using TaylorSeries,” ACM Trans. Math. Softw., Vol. 8, No. 2, 1982, pp. 114–144.
149

BIBLIOGRAPHY BIBLIOGRAPHY
[104] Corliss, G. F. and Rihm, R., “Validating an a priori enclosure using high-order Taylorseries,” Scientific Computing and Validated Numerics: Proceedings of the InternationalSymposium on Scientific Computing, Computer Arithmetic, and Validated Numerics,SCAN-95, Held in Wuppertal, Germany, September 26-29, 1995 , Wiley-VCH, 1996,p. 228.
[105] Rihm, R., “Interval Methods for Initial Value Problems in Odes,” Topics in ValidatedComputations. North-Holland , 1994.
[106] Rihm, R., “On a Class of Enclosure Methods for Initial Value Problems,” Computing ,Vol. 53, No. 3, 1994, pp. 369–377.
[107] Berz, M. and Hoffstatter, G., “Exact Bounds of the Long Term Stability of WeaklyNonlinear Systems Applied to the Design of Large Storage Rings,” Interval Computa-tions, Vol. 2, 1994, pp. 68–89.
[108] Makino, K., Rigorous Analysis of Nonlinear Motion in Particle Accelerators, Ph.D.thesis, Michigan State University, 1998.
[109] Makino, K. and Berz, M., “COSY INFINITY Version 9,” Nuclear Inst. and Methodsin Physics Research, A, Vol. 558, No. 1, 2006, pp. 346–350.
[110] Gajda, K., Jankowska, M., Marciniak, A., and Szyszka, B., “A Survey of IntervalRungeKutta and Multistep Methods for Solving the Initial Value Problem,” ParallelProcessing and Applied Mathematics, 2008, pp. 1361–1371.
[111] Moore, R. E., “Interval analysis.” Prentice Hall, New Jersey , 1966.
[112] Moore, R. E. and Bierbaum, F., Methods and applications of interval analysis, 1979.
[113] Nedialkov, N. S. and Jackson, K. R., “ODE Software that Computes GuaranteedBounds on the Solution,” Advances in Software Tools for Scientific Computing ,Springer-Verlag, 1999.
[114] Alessi, E. M., Farres, A., Jorba, A., Simo, C., and Vieiro, A., “Efficient Usage of SelfValidated Integrators for Space Applications,” Tech. rep., ESA, 2007.
[115] Kruckeberg, F., “Ordinary Differential Equations, Topics in Interval Analysis, ed,” E.Hansen (Clarendron Press, Oxford, 1969), 1969.
[116] Lhner, R., Einschliessung der Lsung gewhnlicher Anfangs-und Randwertaufgaben undAnwendungen, Karlsruhe, 1988.
[117] Nedialkov, N. S., Computing Rigorous Bounds on the Solution of an Initial ValueProblem for an Ordinary Differential Equation, Ph.D. thesis, University of Toronto,1999.
[118] Nedialkov, N. S. and Jackson, K. R., “An Effective High-Order Interval Method forValidating Existence and Uniqueness of the Solution of an IVP for an ODE,” COM-PUTING , Vol. 17, 2001, pp. pages.
[119] Coddington, E. A. and Levinson, N., Theory of Ordinary Differential Equations,[[McGraw-Hill]], New York, 1955.
[120] “Picard Iteration Revisited,” http://math.fullerton.edu/mathews/n2003/PicardIterationMod.html,2009.
150

BIBLIOGRAPHY BIBLIOGRAPHY
[121] Alefeld, G. and Herzberger, J., “Introduction to interval computations,” New York ,1983.
[122] Caprani, O. and Madsen, K., “Mean value forms in interval analysis,” Computing ,Vol. 25, No. 2, June 1980, pp. 147–154.
[123] Nedialkov, N. S., “Interval tools for ODEs and DAEs,” Scientific Computing, Com-puter Arithmetic and Validated Numerics, 2006. SCAN 2006. 12th GAMM-IMACSInternational Symposium on, 2006, pp. 4–4.
[124] Moore, R. E., “The automatic analysis and control of error in digital computationbased on the use of interval numbers,” Error in digital computation, Vol. 1, 1965.
[125] Mrozek, M. and Zgliczynski, P., “Set arithmetic and the enclosing problem in dynam-ics,” Annales Polonici Mathematici , Vol. 74, 2000, p. 237259.
[126] Lin, Y. and Stadtherr, M. A., “Validated Solutions of Initial Value Problems forParametric Odes,” Applied Numerical Mathematics, Vol. 57, No. 10, 2007, pp. 1145–1162.
[127] Jackson, L. W., “Interval Arithmetic Error-Bounding Algorithms,” SIAM Journalon Numerical Analysis, Vol. 12, No. 2, April 1975, pp. 223–238, ArticleType: pri-mary article / Full publication date: Apr., 1975 / Copyright 1975 Society for Indus-trial and Applied Mathematics.
[128] Zazzera, F., Vasile, M., Massari, M., and Lizia, P. D., “Assessing the Accuracy ofInterval Arithmetic Estimates in Space Flight Mechanics,” Tech. rep., ESA, 2004.
[129] Alkire, B., “EE103 Applied Numerical Computing Lecture Notes,” 2005.
[130] Nedialkov, N. S. and Jackson, K. R., A new perspective on the wrapping effect ininterval methods for initial value problems for ordinary differential equations, 2000 ,preparation, 2001.
[131] Makino, K. B. and Berz, M., “Remainder Differential Algebras and Their Applica-tions,” Computational Differentiation: Techniques, Applications, and Tools, SIAM ,1996, pp. 63–74.
[132] Neher, M., “From Interval Analysis to Taylor Models-An Overview,” Proc. IMACS ,2005, pp. 102–0658.
[133] Berz, M. and Makino, K., “Performance of Taylor Model Methods for Validated Inte-gration of ODEs,” Applied Parallel Computing , 2006, pp. 65–73.
[134] Makino, K., Berz, M., Jagasia, R., Armellin, R., and Lizia, P. D., “Validated Integra-tion of Solar System Dynamics,” .
[135] Jackson, K. R. and Nedialkov, N. S., “Some recent advances in validated methods forIVPs for ODEs,” Appl. Numer. Math., Vol. 42, No. 1, 2002, pp. 269–284.
[136] Hoefkens, J., Rigorous Numerical analysis with high-order taylor models, Ph.D. thesis,Michigan State University, 2001.
[137] Makino, K. and Berz, M., “Higher Order Verified Inclusions of Multidimensional Sys-tems by Taylor Models,” Nonlinear Analysis, Vol. 47, No. 5, 2001, pp. 3503–3514.
151

BIBLIOGRAPHY BIBLIOGRAPHY
[138] Lin, Y., Enszer, J. A., and Stadtherr, M. A., “Enclosing all solutions of two-pointboundary value problems for ODEs,” Computers and Chemical Engineering , Vol. 32,No. 8, 2008, pp. 1714–1725.
[139] Berz, M. and Makino, K., “Suppression of the Wrapping Effect by Taylor Model-Based Verified Integrators: Long-Term Stabilization by Shrink Wrapping,” Interna-tional Journal of Differential Equations and Applications, 2006.
[140] Alessi, E., Farres, A., Jorba, A., and Vieiro, A., “Numerical Integration MethodsApplied to Astrodynamics and Astronomy (IV),” 2008.
[141] Berz, M. and Makino, K., “Verified Integration of ODEs and Flows Using DifferentialAlgebraic Methods on High-Order Taylor Models,” Reliable Computing , Vol. 4, No. 4,Nov. 1998, pp. 361–369.
[142] Berz, M., Makino, K., and Hoefkens, J., “Verified integration of dynamics in the solarsystem,” Nonlinear Analysis, Vol. 47, No. 1, Aug. 2001, pp. 179–190.
[143] Hoefkens, J., Berz, M., and Makino, K., “Controlling the Wrapping Effect in theSolution of ODEs for Asteroids,” Reliable Computing , Vol. 9, No. 1, Feb. 2003, pp. 21–41.
[144] Kearfott, R. B. and Walster, G. W., “Symbolic Preconditioning with Taylor Models:Some Examples,” Reliable Computing , Vol. 8, No. 6, Dec. 2002, pp. 453–468.
[145] Makino, K. and Berz, M., “Efficient Control of the Dependency Problem Based onTaylor Model Methods,” Reliable Computing , Vol. 5, 1999, pp. 3–12.
[146] Bouissou, O. and Martel, M., “Grklib: A Guaranteed Runge Kutta Library,” ScientificComputing, Computer Arithmetic and Validated Numerics, 2006. SCAN 2006. 12thGAMM - IMACS International Symposium on, 2006, p. 8.
[147] Bieberbach, L., “On the remainder of the Runge-Kutta formula in the theory ofordinary differential equations,” Zeitschrift fr Angewandte Mathematik und Physik(ZAMP), Vol. 2, No. 4, 1951, pp. 233–248.
[148] Lotkin, M., “On the Accuracy of Runge-Kutta’s Method,” Mathematical Tables andOther Aids to Computation, Vol. 5, No. 35, July 1951, pp. 128–133, ArticleType:primary article / Full publication date: Jul., 1951 / Copyright 1951 American Math-ematical Society.
[149] Carr, I. I. I. J. W., “Error Bounds for the Runge-Kutta Single-Step Integration Pro-cess,” J. ACM , Vol. 5, No. 1, 1958, pp. 39–44.
[150] Marciniak, A. and Szyszka, B., “On representations of coefficients in implicit intervalmethods of RungeKutta type,” Computational Methods in Science and Technology ,Vol. 10, No. 1, 2004, pp. 5771.
[151] Marciniak, A. and Szyszka, B., “One-and Two-Stage Implicit Interval Methods ofRunge-Kutta Type,” Computational Methods in Science and Technology , Vol. 5, 1999,pp. 53–65.
[152] “IEEE Standard for Floating-Point Arithmetic,” 2008.
152

BIBLIOGRAPHY BIBLIOGRAPHY
[153] Hargreaves, G. I. and Hargreaves, G. I., “Interval Analysis in MATLAB,” DEPART-MENT OF MATHEMATICS, UNIVERSITY OF MANCHESTER, MANCHESTER,Vol. 416, 2002.
[154] “www.Autodiff.org - Community Portal for Automatic Differentiation,”http://www.autodiff.org/.
[155] Rall, L. B. and Corliss, G. F., “An Introduction to Automatic Differentiation,”BBCG96], pp. 1-18 , 1996.
[156] Stauning, O. and Bendtsen, C., “FADBAD++ Automatic Differentiation Made Easy,”http://www2.imm.dtu.dk/˜km/FADBAD/, 1997.
[157] utep, “Interval and Related Software,” http://www.cs.utep.edu/interval-comp/intsoft.html.
[158] Keil, C., “PROFIL/BIAS,” http://www.ti3.tu-harburg.de/Software/PROFILEnglisch.html.
[159] Pion, “CGAL - Computational Geometry Algorithms Library,” http://www.cgal.org/.
[160] Lerch, M. and Tischler, G., “FILIB++ Interval Library,” http://www.math.uni-wuppertal.de/˜xsc/software/filib.html.
[161] Rouillier, F. and Revol, N., “MPFI 1.0:,” http://perso.ens-lyon.fr/nathalie.revol/mpfi toc.html.
[162] Melquiond, G., “Boost Interval Arithmetic Library,”http://www.boost.org/doc/libs/1 39 0/libs/numeric/interval/doc/interval.htm,2002.
[163] Bronnimann, H., Melquiond, G., and Pion, S., “The design of the Boost intervalarithmetic library,” Theor. Comput. Sci , Vol. 351, No. 1, 2006, pp. 111118.
[164] Kearfott, R. B. and Hu, C., “Fundamentals of Interval Computing,” Knowledge Pro-cessing with Interval and Soft Computing , 2008, pp. 1–12.
[165] Zilinskas, J., “Comparison of packages for interval arithmetic,” Informatica, Vol. 16,No. 1, 2005, pp. 145–154.
[166] Siegfried, R., “INTLAB - INTerval LABoratory,” http://www.ti3.tu-harburg.de/rump/intlab/.
[167] Zemke, J., “b4m - Free Interval Arithmetic Toolbox for Matlab,” http://www.ti3.tu-harburg.de/zemke/b4m/index.html, 1998.
[168] Hovland, P., Norris, B., and Bischof, C., “ADIC Resource Center,”http://www.mcs.anl.gov/research/projects/adic/, 2000.
[169] Walther, A. and Griewank, A., “ADOL-C,” http://www.math.tu-dresden.de/˜adol-c/.
[170] “TAPENADE On-line Automatic Differentiation Engine,”http://tapenade.inria.fr:8080/tapenade/index.jsp.
[171] Bendtsen, C. and Stauning, O., “FADBAD, a flexible C++ package for automaticdifferentiation,” Department of Mathematical Modelling, Technical University of Den-mark , 1996.
153

BIBLIOGRAPHY BIBLIOGRAPHY
[172] “TomSym - MATLAB Symbolic Optimization Modeling,” http://tomsym.com/.
[173] Nedialkov, N. S., Jackson, K. R., and Corliss, G. F., “Validated Solutions of InitialValue Problems for Ordinary Differential Equations,” Applied Mathematics and Com-putation, Vol. 105, No. 1, Oct. 1999, pp. 21–68.
[174] Stauning, O., Automatic validation of numerical solutions, 1997.
[175] Nedialkov, N., “VNODE,” http://www.cas.mcmaster.ca/˜nedialk/Software/VNODE/VNODE.shtml.
[176] Nedialkov, N., “VNODE-LP,” http://www.cas.mcmaster.ca/˜nedialk/vnodelp/.
[177] Nedialkov, N. S. and Jackson, K. R., “The Design and Implementation of an Object-Oriented Validated Ode Solver,” 2002.
[178] Lin, Y. and Stadtherr, M. A., “Validated solution of initial value problems for ODEswith interval parameters,” Proceedings of 2nd NSF Workshop on Reliable EngineeringComputing (Savannah, GA, February 2006), RL Muhanna and RL Mullen, Eds, 2006,pp. 155–167.
[179] Lin, Y. and Stadtherr, M. A., “Deterministic global optimization of nonlinear dynamicsystems,” AIChE Journal , Vol. 53, No. 4, 2007, pp. 866–875.
[180] Rauh, A. and Auer, E., “ValEncIA-IVP,” http://valencia-ivp.com/, 2008.
[181] Rauh, A., Hofer, E. P., and Auer, E., “A Novel Interval Method for Validating StateEnclosures of the Solution of Initial Value Problems,” submitted to IEEE Transactionson Automatic Control , 2006.
[182] Rauh, A., Auer, E., and Hofer, E. P., ValEncIA-IVP: A Case Study of ValidatedSolvers for Initial Value Problems, SCAN, 2006.
[183] Auer, E., Rauh, A., Hofer, E., and Luther, W., “Validated Modeling of MechanicalSystems with SmartMOBILE : Improvement of Performance by ValEncIA-IVP,” Re-liable Implementation of Real Number Algorithms: Theory and Practice, 2008, pp.1–27.
[184] Hansen, E. and Walster, G. W., Global Optimization Using Interval Analysis: RevisedAnd Expanded , CRC, 2nd ed., Dec. 2003.
[185] Chu, Q. P. and Mooij, “A Feasibility Study to the Application of Interval Analysis toRe-Entry Trajectory Optimization,” Honolulu, Hawaii, 2008.
[186] Chu, W., “Interval analysis applied to re-entry flight trajectory optimization,” Tech.rep., 2007.
[187] Filipe, N. R. S., “Terminal Area Energy Management Trajectory Optimization usingInterval Analysis,” Tech. rep., Dec. 2008.
[188] Berz, M. and Hoffsttter, G., “Computation and Application of Taylor Polynomials withInterval Remainder Bounds,” Reliable Computing , Vol. 4, No. 1, Feb. 1998, pp. 83–97.
[189] Berz, M., “From Taylor Series to Taylor Models,” AIP CONFERENCE PROCEED-INGS , IOP INSTITUTE OF PHYSICS PUBLISHING LTD, 1997, pp. 1–24.
[190] USSSN, “Space-Track,” http://www.space-track.org/perl/login.pl, 2009.
[191] Kaula, W. M., Theory of satellite geodesy , Blaisdell Pub. Co, 1966.
154