Some Technical Considerations In negative selection algorithms 4/15/2005.
16
Some Technical Considerations In negative selection algorithms 4/15/2005
-
date post
19-Dec-2015 -
Category
Documents
-
view
214 -
download
1
Transcript of Some Technical Considerations In negative selection algorithms 4/15/2005.

Some Technical Considerations
In negative selection algorithms
4/15/2005

Two issues• Boundary-aware versus point-wise: a
negative selection can do something positive selection cannot.
• Geometric shape of detectors: whether and why it matters.

Background• “greatest common factor” in negative
selection algorithms: detectors representing complementary space

Boundary-aware vs. point-wise• Self region is not equivalent to
training points.
• Boundary-aware: training data are used as a group instead of individuals.
• Assumption on self samples

Training points are discrete• Where does ‘self’ stop? (We will see it is not only the issue of self
threshold.)

Boundary-aware NS algorithmThe sample points are used
collectively:
• It provides more information than what can be obtained from points individually• whole is large than parts
• Positive selection cannot do.
• Drawback: clusters are not represented explicitly.

Simplified example

Fair assumption• It is fair to assume that the density of
self sample distribution is related to “self threshold”.
• There is no reason to assume that the self samples are not close to the boundary between self and nonself regions.

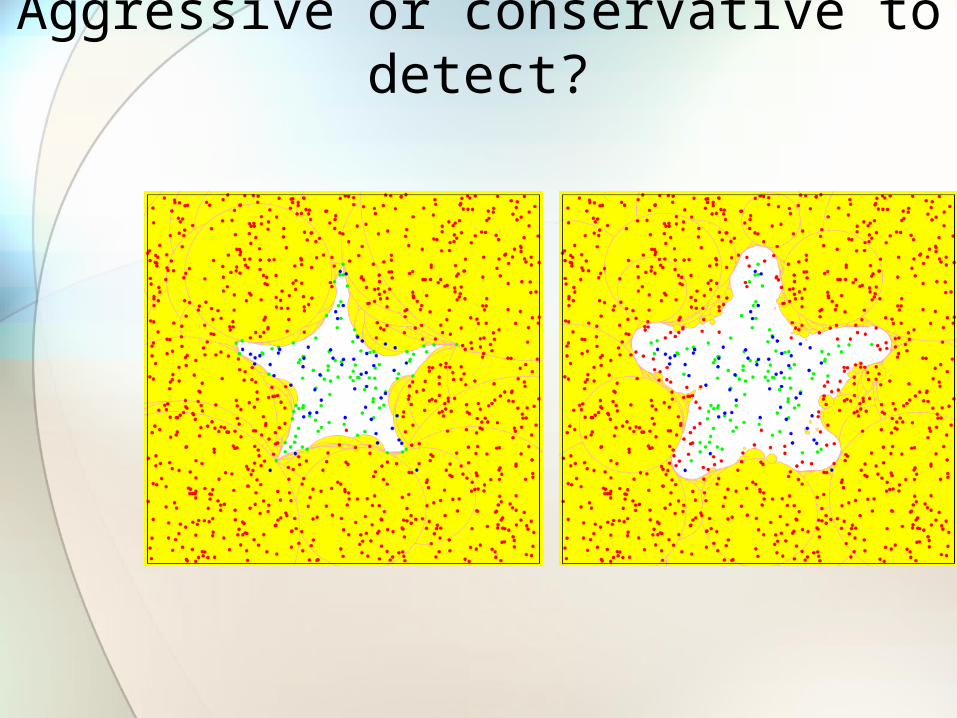
Aggressive or conservative to detect?

Geometric shape of detectors• Depending on data representation,
generation algorithm.
• Comparison of different simple shapes.
• Potential benefit of various shapes or multiple shapes.
• Sphere is minimal

Two Examples of different algorithms
• GA with niching (hyper-cube)• GA
1. Raw_fitnessR = volume(R) − C · num_elements(R)
2. fitnessR = raw_fitnessR − volume(R \ Rj)
• V-detector (sphere)1. Random position
2. Largest size that does cover self samples• Possible extension to accommodate noise data

comparison• (hyper) sphere: position + size• Hyper-ellipse: position + size in each
direction• Rectangle, (hyper) cute: rules (or
value ranges) in each direction
• “Hyper” means high dimensional. Or more than that?
• More parameters for each detectors is not necessarily a bad thing, but we need a reason of advantage to use it.

Why different shapes?• Some works tried various shapes. Only
comparing performance empirically is not enough to reveal which is better in which scenario.
• One specific shape cannot be the best for all possibility.• For example, if the nonself region is long in
one direction, it has to take may spherical detectors, but not necessarily rectangular detectors.
• Combination may include strength of different shapes.
• Complicity in generation and representation cannot be ignored.

Sphere is good• Minimal: a point plus a matching
threshold (distance measure)
• Hyper sphere is not the limit: abstract sphere• It applies to different distance measure.
• For example, Manhattan distance –square (45o rotated)
• It applies to different data representation.
• Is sphere good enough??

references• D. Dasgupta and F. Gonzalez. An Immunity-
Based Technique to Characterize Intrusions in Computer Networks. IEEE Transactions on Evolutionary Computation, 6(3), pages 1081-1088 June 2002.
• Zhou Ji, Dipankar Dasgupta, Negative Selection Algorithm using Variable-Sized Detectors in Real-Valued Application. GECCO 2004
• Z. Ji. Influence of training data’s interpretation strategy on real-valued negative selection algorithm, Technical report, The University of Memphis, June, 2004.