Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions

of 44
-
Upload
chisn-lin-chisn -
Category
Documents
-
view
219 -
download
0
Transcript of Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
1/44
Homework #1 Odd Numbered Answers
1. From Wikipedia, there are many very readable accounts of the life and technical achievements of J.C.Maxwell, and H.R. Hertz, G. Marconi, and N. Tesla. Their backgrounds, personalities, professional recog-nitions, and financial successes from their works, varied great. History of Radio, is another interestingarticle on Wikipedia on wireless communications. This article also referenced a PBS documentary pro-gram by Ken Burns entitle, Empire of the Air: The Men Who Made Radio, 1992. Besides the book,History of Wireless, by T.K. Sarkar, et al, J. Wiley, 2006, many other books on early workers in this
area appeared in the references at the end of the article,History of Radio.
3. a. For R = 1 G bits/sec. , the new power requirement becomes PT = 5.68 105 watts.
b. ForR = 100 K bits/sec., the new power requirement becomes PT = 5.54105 watts. If this power is
too demanding, we can get closer to the base-station with a range ofr = 1 km. Then PT = 2.22106
watts. If this power is still considered to be too high, perhaps we can attach an external higher gainantenna with GT = 2. Then PT = 1.11 10
6 watts.
c. Under the new conditions, the power requirement becomes PT = 1, 680 watts. This power requirementis definitely not reasonable for a small UAV. IfGT = 100, then PT= 168 watts, perhaps may stillbe too demanding.
d. For a low-altitude satellite, the power becomes PT = 3.65 105 watts. By using a lower gain
GT = 1, 000, the power becomes PT = 3.65 104
watts, which is still very modest.5. Using the Matlab fminsearch.m function to minimize the residual of ||y as||l1, with an initial starting
point of 0.4, we obtained aAE0
= 0.5545312500000005 with an AE error ofAE(aAE0
) = 4.724562499999993.Using an an initial starting point of 0.6, we obtained aAE0 = 0.5545605468749999 with an AE error ofAE(a
AE0
) = 4.724484374999999. We can conclude that regardless of the initial starting points, bothsolutions are extremely close. Furthermore,AE(a1) = 11.208 andAE(a2) = 5.188.Clearly, both AE(a1)and AE(a2) are greater than AE(a
AE0
), since AE(aAE0
) is the minimum AE error.
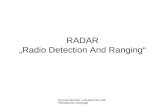
7. Using (6-15) for x and y2, the explicit solution of the optimum LSE solution aLS0 = 1.601464615384616.Using the Matlab fminsearch.m function to minimize the residual of||y2 as||l1, with an initial startingpoint of 0.53, we obtained aAE
0 = 0.5558271484375. The following left figure, plots x vs y2 and a straight
line of slope aLS0 .The following right figure, plots x vs y2 and a straight line of slope aAE0 .In both figures,
we notice two outliers at x = 3 and x = 5.However, in the right figure, most of the values ofy2 are quiteclose to the straight line with the aAE0 slope, whilte in the left figure most of the values ofy2 are quite farfrom the straight line with the aLS
0 slope. This example shows the robust property of linear estimation
based on the LAE Criterion over that based on the LSE Criterion.
0 2 4 6 8 10 120
10
20
30
40
50
60
70
80
90
100
x
y
0 2 4 6 8 10 120
10
20
30
40
50
60
70
80
90
100
x
y
9. From (6-35) - (6-37), we obtained for n = 1, an = [0.4] and MS(an) = 0.68. For n = 2, an =[0.011905, 0.39524]T andMS(an) = 0.67976 .Forn = 3,an = [0.0048193, 0.01, 0.39518]
T andMS(an) =
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
2/44
Chapter 2
Review of Probability and Random Processes
Odd Numbered Homework Solutions
1. Bernoulli: p, q 0, p + q= 1.fX(x) =q(x) +p(x 1), FX(x) =qu(x) +pu(x 1), X =p, 2X =pq.
Binomial: p, q 0, q+ q= 1, n 1.
Pn(k) =(n
k
)pkqnk, 0 k n, fX(x) =
nk=0
Pn(k)(x k), FX(x) =n
k=0
Pn(k)u(x k),
X =np, 2X =npq.
Poisson: b > 0.
Pk =bk
k!eb, k= 0, 1, 2, . . . , f X(x) =
k=0
Pk(x k), FX(x) =k=0
Pku(x k),
X =b, 2X =b.
Cauchy: a >0.
fX(x) = a
(x2 + a2), | < x < , FX(x) = 1
tan1
(xa
)+
1
2, < x < .
The mean and variance of the Cauchy random variable are undefined.
Exponential: >0.
fX(x) =
ex, x 00, otherwise
, FX(x) =
1 ex, x 00, otherwise
, X = 1
, 2x =
1
2.
Gaussian:
fX(x) = 1
2Xexp
(x X)222X
, < x < , FX(x) =
(x XX
), < x < .
X = E[X], 2X = Var[X]
Laplace: b >0.
fX(x) = b
2exp(b|x|), | < x < , X = 0, 2X =
2
b2,
FX(x) =
1
2ebx, < x 0.
fX(x) =
2xb exp
(x2b
), x 0
0, otherwise,FX(x) =
1 exp
(x2b
), x 0
0, otherwise,
X =
b4
, 2X = (4 ) b43. a.
1 = c
10
10
(x + y) dxdy = c
10
( 12
x2 + xy)1
0dy = c
10
( 12
+ y) dy
= c( 12 y+ 12 y
2)10= c c= 1.
34
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
3/44
b.
FXY(x, y) =
0, x 0, < y < ,0, y 0, < x < ,xy(x+y)
2 , 0< x
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
4/44
e. Use the moment generating function method to attack this problem.
Z(t) =E{et(2X+3Y)} =E{et2X}E{et3Y)} =eXee2tXeYee3tY =e(X+Y)ee2tX+e3tY .No.Z is not a Poissonrv , since its Z(t) isnotof theform e
eet.
9.
S() = R(0) + R(1)[e + e] + R(2)[e2 + e2]
= 1 + cos() +12
cos(2), < .
R(n) = 1
2
S()en d= 1
2
[1 + cos() +1
2cos(2)]en d
= 1
2
[en +1
2(e(n+1) + e(n1))
+1
4(e(n+2) + e(n2))] d
= 1
2
{cos(n) +1
2[cos((n + 1)) + cos((n 1))]
+ 14
[cos((n + 2)) + cos((n 2))]} d
= 1
2
sin(n
n ) +
1
2
sin((n + 1))
n + 1 +
sin((n 1))n 1
+1
4
sin((n + 2))
n + 2 +
sin((n 2))n 2
= 1
2
2sin(n)
n +
sin((n + 1))
n + 1 +
sin((n 1))n 1
+1
2
sin((n + 2))
(n + 2) +
1
2
sin((n 2))(n 2)
.
But
sin(m)m
=
, m= 00, m = 0.
Thus, R(n) in indeed yields
R(n) =
1 , n= 0,1/2 , n= 1,1/2 , n= 1,1/4 , n= 2,1/4 , n= 2,0 , all other integral n.
11. a.
E{X(t, )} = 2
0
Acos(t + )d
2 = 0.
b.
RX(t, t + ) =E{X(t, )X(t + , )} = 2
0
Acos(t + )Acos((t + ) + )d
2
= A2
2
20
[cos() + cos(2t + 2)]d
2 =
A2
2 cos(),
where we used the identity cos(u)cos(v) = (1/2)cos(u + v) + (1/2)cos(u v).c.
< X(t, )>=limT1
2T
TT
Acos(t + )dt= 0.
This integral is zero since there is as much area above the abscissa as below due to the symmetry ofthe problem. Of course, if we do the integration, we will find the same result.
36
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
5/44
d.
< X(t, )X(t + , )>=limT1
2T
TT
Acos(t + )Acos((t + ) + )dt
= A2
2 limT
1
2T{ TT
cos()dt +
TT
cos(2t + + 2)dt} = A2
2 cos().
e. Yes, both the ensemble and time averaged means and autocorrelations are the same for this random
process. Of course, we can not claim this process is ergodic having shown only these two averagesare equivalent.
37
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
6/44
Chapter 3
Hypothesis Testing
Odd Numbered Homework Solutions
1. a. erf(x) = 2
x0
et2
dt= 2 12 1
2
x0
et2
2 12dt = 1 2 Q(x/ 1
2).
Q(x) = 12 12 erf( x2) = 12 erfc( x2).
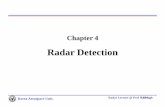
b&c. x Q(x) Q1(x) Q2(x) logQ(x) logQ1(x) logQ2(x)0.5000 0.3085 0.7041 0.3085 -0.5107 -0.1523 -0.5107
1.0000 0.1587 0.2420 0.1587 -0.7995 -0.6162 -0.7995
1.5000 0.0668 0.0863 0.0668 -1.1752 -1.0638 -1.1752
2.0000 0.0228 0.0270 0.0228 -1.6430 -1.5687 -1.6430
2.5000 0.0062 0.0070 0.0062 -2.2069 -2.1542 -2.2069
3.0000 0.0013 0.0015 0.0013 -2.8697 -2.8305 -2.8697
3.5000 0.0002 0.0002 0.0002 -3.6333 -3.6032 -3.6333
4.0000 0.0000 0.0000 0.0000 -4.4993 -4.4755 -4.4991
4.5000 0.0000 0.0000 0.0000 -5.4688 -5.4495 -5.4684
5.0000 0.0000 0.0000 0.0000 -6.5426 -6.5267 -6.5420
0.5 1 1.5 2 2.5 3 3.5 4 4.5 57
6
5
4
3
2
1
0
x
ApproximationvaluesofLog10
Q(x)
Approximations of Log10
Q(x) by Log10
Q1(x) and Log
10Q
2(x)
log10
Q(x)
Log10
Ql(x)
Log10
Q2(x)
3. UnderH0, p0(x) = (1/2)ex/2, x 0; under H1, p1(x) = (x2/16)ex/2, x 0. Then (x) = 2x2, x 0.
Thus, R1 ={x : (x) 0 = 1} ={x : x2 8} ={x : x 2
2} and R0 ={x : 0 x 2
2}.Then PFA = P(x R1|H0) =
22
(1/2)exp(x/2)dx = exp(2) = 0.243 and PD(x R1|H1) =22
(x2/16)exp(x/2)dx= (1/16)exp(2)(32 + 162) = 0.830 .5. We are given
pN(n) = en, 0 n < ,0, n < 0.
Then
p0(x) =
ex, 0 x < ,0, x
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
7/44
IfP({x: (x) = 0}) = 0, then we can arbitrarily associate the equality of (x) = 0 withR1 and have
R1 = {x: (x) 0}R0 = {x: (x)< 0}.
IfP({x: (x) = 0})> 0 (which is the case for this problem), we need to associate the equality with R1and R0 in a fairer manner consistent with other constraints.
If we set 0< 0< e, then
R1 = {1 x < } = {x: e= (x)> 0}R0 = {0 x
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
8/44
Thus, x2= ln(e1 0.1) 1.32 and
PD2 =
R1
p1(x) dx=
x21
e(x1) dx= e x21
ex dx= 0.1e.
This shows,
R1 = {x: 1 x x2= ln(e1 0.1)},
R0 = {x: x2< x} {x: 0 x 5|p = 0.02) =
k=6 C200k (0.02)
k(.98)200k. Now, = np= 200 0.02 = 4and PM 1
5k=0exp(4)4
k
k! = 0.215.In plain English, if one uses the existing manufacturing process (i.e., H0), then one has a probability of0.933 of having declaring more than 5 defective items in a sample of 200 items, while if one uses the newmanufacturing process (i.e., H1), then one has a much lower probability of 0.215 of declaring more than 5defective items in a sample of 200 items. The manufacturing manager will be much happier with the newmanufacturing process.
9. a. From the LR Test, we know R1 =
{x : x > x0
} and R0 =
{x : x < x0
}where x0 =
12
+ ln 0 =
12 + ln 1 . Then
C(, ) = C() =
x0
12
ex2/2 dx + (1 )
x0
e(x1)2/2 dx
= Q(x0) + (1 )(1 Q(x0 1)).b.
C() C(, 0.1) C(, 0.5) C(, 0.9)1E3 1E3 4.4477E3 0.30854 0.954220.01 0.01 0.013013 0.30854 0.945660.1 0.098664 0.098664 0.30854 0.860010.2 0.18616 0.19383 0.30854 0.764840.3 0.253 0.289 0.30854 0.669670.4 0.2945 0.38417 0.30854 0.5745
0.5 0.30854 0.47933 0.30854 0.479330.6 0.2945 0.5745 0.30854 0.384170.7 0.253 0.66967 0.30854 0.2890.8 0.18616 0.76484 0.30854 0.193830.9 0.098664 0.866001 0.30854 0.0986640.99 0.01 0.94566 0.30854 0.0130130.999 1E3 0.95422 0.30854 4.4477E3
Table 1. C() and C(, 0) vs. .
c. C(, 0) =Q(x1) + (1 )(1 Q(x1 1)), wherex1= 12 + ln( 010 ).d. See Table 1.
e. Plots ofC() and C(, 0) vs. .
3
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
9/44
11. From the solution of Problem 6, we know
(x) = p0(x)p1(x) = (m1/m0)m2
0+x2
m21+x2
, < x < , m1> m0 ,(x) 0 m
2
0+x2
m21+x2
(m0/m1)0= .
If 0, then R1 = and R0 =. If > 0, then R1 ={x :|x| } and R0 ={x :|x| }. Thisshows thatR1 andR0 are functions of the parameter m1. Furthermore,
PFA=
p0(x)dx +
p0(x)dx =1
p0(x)dx
= 1 2m
0
dx
m2
0+x2
= 1 2
tan1
m0
m0 tan((/2)(1 PFA)) = .This shows that PFA is indeed a function of the parameter m1, and thus this LR test is not UMP.
13. a.
Lm(xm) = xm1 (1 1)mxmxm0 (1 0)mxm
.
b.
log(B)< xnlog(1/0) + (m xm) log((1 1)/(1 0))< log(A) , b + c m < xm < a + c m ,b= log(B)
log(1(10)/(0(11))), a= log(A)
log(1(10)/(0(11))), c= log((11)/(10))log(1(10)/(0(11))).
c.
A
= 0.95
0.05 = 19 , B 1
1 =0.05
0.95 = 0.0526 .
nH0 log(B)(1)+log(A)E{z|H0} , nH1 log(B)+log(A)(1)
E{z|H1} ,
E{z|H0} =EH0
logpXi (xi|H1)pXi (xi|H0)
= EH0
log
xi
1 (11)1xi
xi
0 (10)1xi
|
=0log10
+ (1 0)log
1110
= 0
log
10
log
1110
+ log
1110
=0log
1(10)0(11)
+ log
1110
= 0.2log
0.60.80.20.4
+ log
(0.40.8
)= 0.3348 ,
nH0 2.79778+0.147220.3346 = 7.92 ,E{z|H1} =EH1 log
pXi (xi|H1)pXi (xi|H0)= 0.3820; nH1
1.4725+2.79720.3820 = 6.94 .
4
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
10/44
d. Under theH0 simulation, the 10Ln values are:{4.6875e 002, 4.2235e 002, 3.1250e 002, 3.1250e 002, 3.5156e 002, 3.1250e 002, 3.1250e 002, 4.6875e 002, 4.6875e 002, 4.6875e 002} . Theassociated n values are:{7, 33.5, 5, 10, 5, 5, 7, 7, 7}. Thus, the average number of terms of these real-izations is n= 9.10 . The theoretical value is given by nH0 = 7.92. We note, simulation result of nisfairly close to the theoretical value of nH0 .
Under theH1simulation, the 10Ln values are:{4.5562e+001, 2.7000e+001, 3.0375e +001, 2.0250e+001, 2.0250e+ 001, 2.7000e+ 001, /, 2.7000e+ 001, 2.5629e+ 001, 2.5629e+ 001}. The associated nvalues are:{10, 3, 8, 6, 6, 3, /, 3, 3, 16, 15} Thus, the average number of terms of these realizations isnH1 = 7.79 . The theoretical value is given by nH1 = 6.94. We note, in realization 7, even afterconsidering up to n = 35, the Ln value still did not exceed the threshold value of A = 19. Thus,by omitting that outlier, only 9 terms were used in the evaluation of nH1 . We also note, simulationresult of n is fairly close to the theoretical value of nH1 .
15. There are three typos on p. 90. In Table 3.3, 1., forn = 20, A should = 0.13159 and 2., for n = 10, Ashould = 0.005909 . 3. Five lines below Table 3.3, should = (0/
n).
The answer to this problem is tabulated below in Table 1.
n A G andSTn= 10
A= 0.17188G= 0.95680> ST= 0.87913
A = 0.010742G= 0.64135> ST= 0.37581
n= 20A= 0.13159
G= 0.99591> ST= 0.96786A = 0.005909
G= 0.89368> ST= 0.62965
Table 1: Comparisons of probability of detection PD(Gaussian) = G to PD(SignTest) = ST for n = 10,A= 0.17188 and 0.010742, and forn= 20, A = 0.13159 and 0.005909, with p = 0.8.
5
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
11/44
Chapter 4
Detection of Known Binary Deterministic Signals in Gaussian Noises
Odd Numbered Homework Solutions
1.s02 = 12 + 22 + 32 = 1 + 4 + 9 = 14 = s12
0 =
0(C10
C00)
1(C01 C11) =0.25
(2
0)
0.75 (1 0)=0.50
0.75=
2
3 ; 2
= 1.
= 2 ln 0+1
2s12
1
2s02 = 0.406.
xT(s1 s0) H1. 2[x1, x2, x3] 12
3
H1.
1 = x1+ 2x2+ 3x3 0.4062
= 0.203 H1.1|H0 = E{1|H0} = s02 = 141|H1 =
14
21 = 12 + 22 + 32 = 14.
R1 = {x: 1 = xTs0 0.203}, R0 = {x: 1 0.203}.
PFA = P{1 0.203|H0} = 12 14
0.203
e(114)2/28 d1
= 1
2
(0.20314)/14
et2/2 dt=
12
13.8/3.74
et2/2 dt
= 1
2
3.69
et2/2 dt= Q(3.69) = 0.000112.
PD = P{1 0.203|H1} = 12
0.203
e(1+14)2/28 d1
= 1
2
14.203/3.74
et2/2 dt=
12
3.80
et2/2 dt
= 1 Q(3.80) = 0.999928.
Since s0 = [2,
6, 2]T = s1 has the same norm ass0 = [1, 2, 3]T = s1, all the previous results on R0,R1, PFA, and PD apply.
3. a. From theory, we know for a binary detection of deterministic waveform in WGN, the sufficient statistic
is given by =T0 x(t)[s1(t) s0(t)]dt= 10
T0 x(t) sin(2f0t)dt.Futhermore, the threshold constant
for is given by = (N0/2)ln(0) + 0.5T0
[s21(t)s20(t)]dt = 50T0
sin2(2f0t)dt = 25. ThenR1 = {x(t) : } and Ro= {x(t) : }.
b. Sinceis a Gaussian r.v., we need to find its means and variances under H0andH1. 0 = E{|H0} = 0.1 = E{|H1} = 100
To sin
2(2f0)tdt = 50. 2 = E{( 0)2|H0} = 100T0
sin2(2f0t)dt = 50.ThenPFA= Q(/) = Q(3.5355) = 2.035E 4. PD = Q(( 1)/) = 0.9998.
c. Now, =T0
x(t)s(t)dt. Then 0= E{|H0} = 0.1 = E{|H1} = 100 2 105
0.51050
sin(2f0t)dt= 200/= 63.6620.
2 = 100T0
(s(t))2dt= 100 1 = 100.
1
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
12/44
PFA= Q(/) = Q(25/10) =Q(2.5) = 6.2E 3.PD = Q((25 63.662)/10) =Q(3.8662) = 0.9999.We note,PD > PD (which is good), but P
FA> PFA (which is bad.) Thus, it is hard to compare the
performance of the receiver using s(t) instead ofs(t) explicitly if we allow both probability of falsealarm and probability of detection to vary as compared to the original optimum case.
d. In order to find a new , we setPFA= PFA() = 2.035E 4.Then, we must have 3.5355 =/10,or
= 35.355.ThenPD() = Q((
63.662)/10) =Q(
2.8307) = 0.9977.We note, thisPD(
)< PD.
In other words, having used the sub-optimums(t) instead of the optimum s(t) at the receiver, for thesame fixed probability of false alarm, the probability of detection went down from 0.9998 to 0.9977.The degradation of the probability of detection is very small. However, the reduction of complexityof the receiver is fairly significant.
5. UnderH1, the output signal is given by
so(to) =
0, to < 0,
too
s()h(to )d, 0 to T,
To s()h(to )d, T to.UnderH0, so(to) = 0. The output noise under both hypothesis is given byN(to) =
too
N()h(t )d.
Since the mean ofN(.) is zero, its variance is given by
2o(to) =
0, to < 0,
(No/2)
too
h2(to )d, 0 to T,
(No/2)To h
2
(to )d, T to.The output SNR can be defined by SN R(to) = s
2o(to)/
2o(to). For to < 0, SN R(to) is not defined.
Under H0, for 0 < to, then SN R(to) = 0. From Schwarz Inequality, we have (ba
f(t)h(t)dt)2 ba
f2(t)dtba
h2(t)dt, with equality if and only if f(t) = ch(t) for some constant c. Then under H1,we have
Max{h(.)}{SN R(to)} = (2/N0) to0
s2()d, 0 to T,
M ax{h(.)}{SN R(to)} = (2/N0) T0
s2()d, T to.
Thus,
M ax{0to;h(.)}{SN R(to)} = (2/N0) T
0s2
()d.
7. LetK(t) = h(t) and f(t) = exp(i0t). Then denote t s= u and ds = du. Thus,
K(t s)f(s)ds=
h(u) exp(i 0(t u))du=
h(u)exp(i 0u)du exp(i 0t) = H(0) exp(i 0t) .
This show that the eigenvalue = H(0) and the eigenfunctionf(t) = exp(i 0t).
2
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
13/44
9. a.
R=
8 22 5
|R I| = 0
(8 )(5 ) 4 = 0 = 40 13 + 2 4 = 2 13 + 36 = ( 9)( 4) 1 = 9, 2 = 4. 8 22 5
1112
= 9
1112
811+ 212 = 911
211+ 512 = 912 11+ 212 = 0
211 412 = 0
11 = 212, 4212+
212 = 1 5212 = 1 12 = 1/5, 11 = 2/5.
8 22 5
2122
= 4
2122
821+ 222 = 421
221+ 522 = 422 221+ 22 = 0
221+ 22 = 0
1 =
21
1
5, 2 =
12
1
5
b. R1
2 =T D1
2 TT
T =
2 11 2
1
5, D=
9 00 4
D 12 =
13 00 12
c. Whitening filter.
R1
2 = 1
5
2 11 2
13 00 12
2 11 2
=
1
5
2 11 2
23
13
12 1
= 1
5
43 +
12
23 1
23 1 13 + 2
=
1
5
8+3
6 13 13 1+63
=
1
5
116 13
13 73
=
1
30
11 22 14
Check.
R1 = 1
25
12136 +
19 1118 79
1118 79 19 + 499
=
1
25
12536 2518 2518 509
= 19 25
1254
252
252 50
= 1900
125 5050 200
RR1 = 1
900
1000 100 400 + 400
250 250 100 + 1000
=
1 00 1
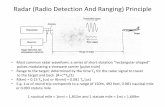
d.
x R-1/2 x
TR
-1/2
x
R-1/2
s -s1 0
xR-1x
s -s1 0
~ ~= s -s1 0R-1/2(s -s )1 0
=xTR
-1(s-s)1 0 =x
TR
-1(s-s)1 0
Whitening filter approachto LR Receiver for CGN
Conventional approachto LR Receiver for CGN
3
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
14/44
= xTR1
2 (s1 s0) = xTR1(s1 s0) H1
> 2> n> 0. Since U is an orthogonal matrix, define a new n1 vector z= U
Ts or s = U z and sT= uTUT,
with ||z||2= 1.
Thus,
1 1
M M1 2 2
i=1 i=1
=
= / .
T T T T T T T T
T T
i i i iz z
s s s s z U UD U Uz z U UDU Uz
z D z z Dz (A1)
Define nnew variables2= 0 , 1,..., ,i iy z i n and substitute them into (A1). Then
M M
1
i=1 i=1
= / .T T i i i iy y
s s s s (A2)
Thus, the upper bound of 1T T s s s s is given by the solution of the following Theorem.
Theorem. The maximum of (A3) given by
n n
i=1 i=1
/ ,i i i i
y y (A3)
subject ton
i=1
= 1 , 0 , 1,..., ,i iy y i n (A4)and
1 2> > ... > 0,n (A5)
as attained by using
1 = = 1/2, = 0 , 2,..., 1 .n iy y y i n (A6)
Proof: Consider the nonlinear minimization problem of
Min y f(y) , (A7)
subject to
gi(y) 0 , i= 1,,M, (A8)
h(y) = 0 . (A9)
The celebrated Karush-Kuhn-Tucker (KKT) [4] necessary conditions for1
[ , ..., ]T
My y y y to be a local minimum
solution of (A7) subject to (A8) and (A9), are such that there exist constants I, i= 1,,M, and satisfying
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
27/44
17
1
1. ( ) ( ) ( ) 0,M
i i
i
f g h
y y y (A10)
2. ( ) 0, 1,..., ,ig i M y (A11)
3. ( ) 0, 1,..., ,h i M y (A12)
4. 0, 1,..., ,i i M (A13)5. ( ) 0, 1,..., .i ig i M y (A14)
In order to use the KKT method for our maximization of (A7) with the constraints of (A8) and (A9), denote
( ) ( ) ( ),f A i B i y (A15)
( ) , 1,..., ,i ig y i M y (A16)
1
( ) 1,M
i
i
h y
y (A17)
1> 2> M> 0 , (A18)
where we define
1 1
( ) / , ( ) .M M
i i i i
i i
A i y B i y
(A19)
Now, we show the conditions of (1)- (5) of (A10) (A14) are satisfied for the expressionsof (A15) - (A18). From Condition 1, by taking its partial derivative wrt toyi, i= 1, ,M, we have
( ) ( )1
0.i ii
B j A j
(A20)
Multiply (A20) byyiyields
( ) ( ) 0.ii i i i i
i
yB j y A j y y
(A21)
From Condition 4 and 0iy , then 0.i iy Thus, (A21) becomes
( ) ( ) 0.ii i i
i
yB j y A j y
(A22)
Summing (A22) over all i = 1, ,M, yields
1
( ) ( ) ( ) ( ),M
i
i
y A i B j B i A j
and from (A8), we have
( ) ( ) ( ) ( ) 2 ( ) ( ).A i B j B i A j A j B j (A23)
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
28/44
18
Substitute (A23) into (A22) yields
( ) ( ) 2 ( ) ( ) 0 ,i i i ii
yB j y A j y B j A j
or
1( ) ( ) 2 ( ) ( ) 0,i i
i
y B j A j B j A j
(A24)
Thus, (A24) shows eitheryi= 0 or
1( ) ( ) 2 ( ) ( ) 0.i
i
B j A j B j A j
(A25)
Multiply (A25) by i, to obtain
2 ( ) 2 ( ) ( ) ( ) 0.i iA j B j A j B j (A26)
The quadratic equation of (A26) in i, has two non-zero solutions given by
2 22 ( ) ( ) 4 ( ) ( ) 4 ( ) ( ).
2 ( )i
B j A j B j A j B j A j
A j
(A27)
The rest of the (M -2) number ofyi= 0 . Denote the indices of the two non-zeroyiby aand b. Then the maximization of
( ) ( )A i B i in (A7)) reduces to the maximization of
2 2
2 2
2
=
= 2 .
a ba a b b
a b
a ba a b b a b
b a
a ba b a b
b a
a ba b a b
b a
y yy y
y y y y y y
y y y y
y y y y
(A28)
By denotingyb= 1 yain (A28), we obtain
1 2 (1 )
( , , ).
a ba a b b
a b
a ba a
b a
a a b
y yy y
y y
H y
(A29)
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
29/44
19
Thus, the maximization in (A7)) reduces to the maximization of ( , , )a a b
H y in (A29). We note ( , , )a a b
H y is a
quadratic function ofya. Taking the partial derivative of ( , , )a a bH y wrt toyayields
( , , )2
2 (1 ) 0,
a a b a ba
a b a
a ba
b a
H yy
y
y
or
2 2 2 ,a b a bab a b a
y
or
1/2 ,a by y (A30)
since
2 0,a b
b a
with .a b The second partial derivative of ( , , )a a bH y shows
2
2
2
( , , )2 2
( )2 0,
a a b a b
a b a
a b
a b
H y
y
since 0 and 0.a b Thus, the local maximum solution of 1 / 2a by y in (A30) is a global maximum
solution of ( , , )a a b
H y . By using 1 / 2a b
y y and denoting / 1,a b
with the assumption of
0,a b
then ( , , )a a b
H y of (A29) can be expressed as
2
( ) 1 (1 / 4)( 2 1 / )
( 1)( 1)1 (1 / 4) 0.
H
(A31)
This shows ( )H is a positive monotonically increasing function of . Since /a b and 0,a b the
maximum of ( )H is attained by using max 1 / M . This means
1 1 / 2, 0, 2,..., 1.M iy y y i M (A32)
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
30/44
20
Thus, the solution given by (A32) is the only solution that satisfies the KKT Condition 1 of (A15) that provides the localminimum of
1 1
( ) /M M
i i i i
i i
f y y
y or the local maximum of
1 1
/M M
i i i i
i i
y y
. But ( , , )a a bH y of (A29) is
a quadratic function, thus the solution given by (A32) yields the global maximum of (A3) or the upper bound of (A2) and(A1).
(KY wants to thank discussions with Prof. L. Vandenberghe and various students in a class project of EE230A for variousinputs in the solution of this problem.)
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
31/44
Chapter 5
M-ary Detection
Odd Numbered Homework Solutions
1. The M-ary MAP decision rule state that we decide for hypothesisHj , if
p(Hj|x)> p(Hi|x),< x 0.Thus,we decide
for hypothesisHj , ifp(x|Hj)j > p(x|Hi)i, allj =i, 1 i, j M.
3. List of some M-ary orthogonal transmission system using a carrier frequency includes:
a. M-ary PSK (including conventional QPSK; offset QPSKl /4 QPSK; etc.);
b. M-FSK.
List of some M-ary orthogonal baseband signals modulating a carrier frequency includes:
a. Time-multiplexed PPM signals;
b. Time-multiplexed PWM signals;
c. Time-multiplexed PAM signals;
d. Time-multiplexed PCM signals.
List of some M-ary non-orthogonal transmission system using a carrier frequency includes:
a. M-QAM;
b. M-CPM (including MSK, etc.).
List of some M-ary non-orthogonal baseband signals modulating a carrier frequency includes:
a. Non-time-multiplexed PPM signals;
b. Non-time-multiplexed PWM signals;
c. Non-time-multiplexed PAM signals;
d. Non-time-multiplexed PCM signals.
5. In aM-ary PAM system where the signal set is given by {A, 3A , . . . , (M/2)A}. We assumeM is aneven integer, and denote sm = (2m 1)A, m= 1, . . . , M/2 and sm = (2m 1)A, m = 1, . . . , M/2.The transmited signal is disturbed by an AWGN noise of zero-mean and variance 2 =N0/2.Then underthe minimum-distance decision rule, the decision regions Rm, for the received value x is given by
Rm =
{x: 2(m 1)A x < 2mA} , for m = 1, 2, . . . , (M/2) 1 , (1a){x: (m 2)A x < } , for m = M/2 , (1b)
{x: 2mA < x 2(m + 1)A} , for m = 1, 2, . . . , (M/2) + 1 , (1c){x: < x (m + 2)A}, for m = M/2 . (1d)
(5.1)
For the two extreme symbols in (1b) and (1d), their two error probabilities are given by 2 Q(A/), whilethe other (M2) error probabilities due to (1a) and (1c) are given by (M2)2Q(A/).Thus, the averagesymbol error proability is given by
Pse = (1/M)[2Q(A/) + (M 2)2Q(A/)] = (2(M 1)/M)Q(A/). (5.2)
The average energy Eav = (1/M)M/2
m=M/2 s2m = (M
2 1)A2/3 or A/ =
3Eav/(2(M2 1). The
energy per bit is given by Eb = Eav/log2M. Thus, the average symbol error proability can be expressedas
Pse = (2(M 1)/M)Q(
(6(Eb/N0)log2M)/(M2 1)). (5.3)
1
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
32/44
7. LetPb() be the probability of bit error given a phase error of , where is the realization of a randomvariable with pdf equal to
p() = 1
22exp
2
22
,
defined over (/2, /2] (Note that we assume that Q(/(2)) 0). Then,
Pb() =Q2E
N0 cos()
.
The average BER is equal to
Pb =
/2/2
Pb()p() d.
If we expand Pb() into a power series up to the second-order term, we have
Pb() Pb(0) + dPb()
d
=0
+ 1
2
d2Pb()
d2
=0
2,
where
Pb(0) = Q
2EN0
,
dPb()
d
=0
=
E
N0exp
E
N0(cos())2
sin()
=0
= 0,
d2Pb()
d2
=0
=
E
N0exp
E
N0(cos())2
2E
N0cos()(sin())2 + cos()
=0
=
E
N0exp
E
N0
.
With this approximation, we obtain for Pb
Pb Q2E
N0+1
2 E
N0exp
E
N02.
9. Consider an uncorrelated random sequence{Bn, < n < }, with E{Bn} = , E{BnBn+m} = 2,
and its variance denoted by 2Bn
.
a. In s(t) =N
n=NBng(t nT), < t < , first assume Bns are deterministic and then take itsFourier transform to yield
C(f) =G(f)N
n=N
Bnein2fT, < f < . (9.1)
After taking the time and statistical averages of|C(f)|2, we obtain
SS(f) = |G(f))|2 limN
1
(2N+ 1)TE
N
n=NBnein2fT
2
= |G(f))|2
T limN
1
(2N+ 1)
Nn=N
Nm=N
R(m)ei(mn)2fT
= |G(f))|2
T
m=
R(m)eim2fT .
(9.2)
b. Since
R(m) = E{Bn+mBn}=
2, m = 0 ,
2Bn + 2 , m = 0 ,
(9.3)
upon substituting (9.3) into (9.2), we obtain
SS(f) = |G(f))|2
T 2Bn + 2
m=
eim2fT . (9.4)2
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
33/44
By using the Poisson formula
m=eim2fT = 1T
m=
(f m/T) , (9.5)
in (9.4), we obtain
SS(f) = |G(f))|2
T
2Bn +
2
T
m=
(fm
T)
= |G(f))|22Bn
T +
(T
)2 m=
|G( mT
))|2(f mT
) .
(9.6)
11. % input dataX=[[-.225 0.93],[-1 2],[-2.5 .5],[-3 -1]];
Y=[[-0.75 0.75],[1 .8],[2 -1],[2.5 1.5],[3 1]];
N=4; M =5;
% Solution via CVX
cvx_begin
variables a(2,1) b u(4,1) v(5,1)
X * a - b > = 1 - u ;
Y*a - b = 1 - u(i), i = 1,2,3,4;
%a*Y(:,j) - b = 0;
v >= 0;
minimize ([ 1 1 1 1]*u + [1 1 1 1 1]*v)
cvx_end
b
a
% Displaying results
linewidth = 0.5; % for the squares and circles
t_min = min([X(1,:),Y(1,:)]);
t_max = max([X(1,:),Y(1,:)]);
tt = linspace(t_min-1,t_max+1,100);
p = -a(1)*tt/a(2) + b/a(2);
p1 = -a(1)*tt/a(2) + (b+1)/a(2);
p2 = -a(1)*tt/a(2) + (b-1)/a(2);
graph = plot(X(1,:),X(2,:), o, Y(1,:), Y(2,:), o,-4:.01:4,zeros(1,801),k,zeros(1,601),
graph = plot(X(1,:),X(2,:), o, Y(1,:), Y(2,:), o,-4:.01:4,zeros(1,801),k,zeros(1,601),
set(graph(1),LineWidth,linewidth);
set(graph(2),LineWidth,linewidth);
set(graph(1),MarkerFaceColor,[0 0.5 0]);
hold on;
plot(tt,p, -r, tt,p1, --r, tt,p2, --r);
axis([-4 4 -3 3])xlabel(x(1))
ylabel(x(2))
3
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
34/44
Homework #6 Answers
1. SinceX and Y are two independent Gaussian r.v.s, then
pX,Y(x, y) =
(ex
2/(22)
22
) (ey
2/(22)
22
)=
e(x2+y2)/(22)
22 .
Letx = r cos() andy = sin().Upon converting from the rectangular coordinate to the polar coordinate,r2 =x2 +y2 and rdrd= dxdy. Then
pR,(r, ) |drd| = pX,Y(x, y) |dxdy| =
e(x2+y2)/(22)
22 r |drd|
| x= r cos()
y = r sin()
= r er
2/(22)
22 |drd| .
pR(r) dr =
20
pR,(r, ) d = rdrer
2/(22)
22
20
d = r er
2/(22)
2 dr , 0 r
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
35/44
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
FR
(r)
r
Rayleigh cdf with = 1
Fig. 2. Plot of Rayleigh cdfFR(r) vs. r.
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
36/44
f. Fig. 3 shows the the empirical cdf and the Rayleigh cdf match each other well.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
r
FR
(r)
Rayleigh cdf and Empirical cdf
Rayleigh cdf
Empirical cdf
Fig. 3. Plots of empirical cdf and Rayleigh cdfFR(r) vs. r.
7. In Fig. 8, the Rician pdf is represented by the solid curve. The Gaussian pdf with mean of = 2 and= 0.5 is represented by the dashed curve. We see this Gaussian approximation pdf appears to have anoffset to the left of the Rician pdf. However, the Gaussian approximation pdf with a modified mean of
2 +2 and = 0.5 is represented by the dotted curve and provide a much better approximation tothe desired Rician pdf.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
x
Pdfvalues
Rician
Gaussian
Gaussianmod. mean
Fig. 8 Plots of Rician pdf, Gaussian pdf, and Gaussian pdf with a modified mean.
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
37/44
9. Fig. 9 compares the Rician pdf with different parameters of the Nakagame pdfs.
0 1 2 30
0.2
0.4
0.6
0.8
1
1.2
1.4
x
Pdfvalues
Rician K=10,s=2
Nakagami m=5.76
0 1 2 30
0.2
0.4
0.6
0.8
1
1.2
1.4
x
Pdfvalues
Rician K=2,s=1
Nakagami m=1.8
Fig. 9. Plots of Rician pdf and Nakagami-m pdf. (a). Rician (K=10, s=2), Nakagami (m = 5.76). (b). Rician(K=2, s=1), Nakagami (m = 1.80).
-
8/11/2019 Solutions for Detection and Estimation for Communication and Radar All_odd_numbered_hw_solutions
38/44
Homework #7 Answers
1. a.
2 = E{(s(t+) as(t))2} =R(0) +a2R(0) 2aR()2
a = 2aR(0) 2R() = 0 = a= R()
R(0)
2Min = E{(s(t+) as(t))s(t+)} =R(0) aR() =R(0) R2()
R(0)
= R2(0) R2()
R(0)
b. ForR(t) =(t), < t < , denote
RC() =
1/c , (c/2) < < (c/2) ,
0 , elsewhere ,
then define() = limc0RC() . Thus,
a=
limc0R()/(1/c) = 0, = 0limc0(1/c)/(1/c) = 1, = 0
, 2Min =
0, = 0, = 0.
c. Consider
E{(s(t+) as(t))s(u)} = R(t+ u) aR(t u)= e|t+u| e||e|tu|= e(t+u) ee(tu)= e(t+u) e(t+u)= 0, >0, t u.
This means
21 = E(s(t+) as(t)
N
i=1bis(ui))
2
= E{(s(t+ as(t))2} +E
( Ni=1
bis(ui))2
E{(s(t+) as(t))2} =2Min .Thus, the minimum m.s. error is attained with allbi = 0. That is, the optimal linear estimate isas(t), where a= R()/R(0), for >0 , and t > ui, for all i.
3. a. From Orthogonal Principle, we obtain E{[S(n) (
k=h(k)X(n k))]X(n j) } = 0 , < j