
Software Receiver Technology
32
Copyright © 2004 NordNav Technologies AB Software Receiver Technology Glenn MacGougan Glenn MacGougan [email protected] +46 703113880 30-September-2004 Tampere University of Technology -The GALILEO & GPS Software Receiver Company
-
Upload
sydnee-moses -
Category
Documents
-
view
30 -
download
0
description
Software Receiver Technology. The GALILEO & GPS Software Receiver Company. 30-September-200 4 Tampere University of Technology. NordNav Technologies AB. Unique Competence GPS & GALILEO Real-time Software Receiver Technology Headquarter in Luleå, Sweden Luleå University of Technology - PowerPoint PPT Presentation
Transcript of Software Receiver Technology

Copyright © 2004 NordNav Technologies AB
Software Receiver Technology
Glenn MacGouganGlenn [email protected]
+46 703113880
30-September-2004Tampere University of Technology
-The GALILEO & GPS Software Receiver Company

Copyright © 2004 NordNav Technologies AB
• Unique Competence GPS & GALILEO Real-time Software Receiver
Technology
• Headquarter in Luleå, Sweden Luleå University of Technology Office in Stockholm
• Developing and licensing real-time GPS & GALILEO software receivers
NordNav Technologies AB
Copyright © 2004 NordNav Technologies AB
Agenda
• GNSS Receiver Technology– Traditional GNSS Receiver Technology– Software Radio Technology– Software GNSS Receiver Technology
• Demonstration– NordNav-R30 Software GPS Receiver– New Features
• GPS and Galileo
• Conclusion

Copyright © 2004 NordNav Technologies AB
GNSS Receiver – 3 Steps• Search phase (acquisition)
– Satellite, Carrier Frequency, Code phase
• Track satellites (tracking)– Adjust local replica signal using
two coupled loops• Code - Delay-Lock-Loop • Carrier - Phase-Lock-Loop
– Decode Data message
• Navigation computation (navigation)– ”Triangulate” position
• Distance to satellites known and their precise position
– X,Y,Z, Velocity and Time
Acq
Start GPSt0
t1
t3
Tracking
TOW decoded ?
Ephemeris decoded ?
Yes
Yes
No
Not2
0-2 sec
1.2-6 sec
18-30 sec4 satellites ?
Yes
No
Acq
Pos Fix
Start GPSt0
t1
t3
Tracking
TOW decoded ?
Ephemeris decoded ?
Yes
Yes
No
Not2
0-2 sec
1.2-6 sec
18-30 sec4 satellites ?
Yes
No

Copyright © 2004 NordNav Technologies AB
Traditional GNSS Receiver Architecture
• Block diagram of a typical GNSS receiver
Pre Amp(LNA)
AGC
DownConverter
A/DConverter
UserInterface
ReferenceOscillator
FrequencySynthesizer
Antenna Analog RF Front End ASIC
N
2
DigitalReceiver
Channel 1
Baseband ASIC
PowerSupply
Analog IF Digital IFRF
AcquisitionTracking
NavigationProcessing
Microprocessor
Low Speed Comm Link

Copyright © 2004 NordNav Technologies AB
Software Radio• The software radio concept is built upon two basic principles
1. Move the analog-to-digital converter (ADC) as close to the antenna as possible
2. Process the resulting samples using a programmable processor
Microprocessor(AssemblyLanguage)
Microprocessor(High LevelLanguage)
Microprocessor(Simulation
Tool)FPGAASIC
Available Processing Rate
Level of Flexibility high
lowhigh
low
Analog filtering
AmplificationAnalog to digital
Conversion (ADC)
Antenna
Programmableelement

Copyright © 2004 NordNav Technologies AB
• Current technology simply does not meet the needs for the ”ideal” software radio
– High-end analog-to-digital converter (ADC) examples• Maxim MAX104: 8 Bits; 1.0 Gsps; 2.2 GHz Analog Input BW• Analog Devices:AD6645: 14 Bits; 0.105 Gsps; 0.200 GHz Analog Input BW
– High performance processor element examples• Intel Pentium IV Processor @ 3.4 GHz clock• Xilinx Virtex II Pro FPGA (up to four embedded PowerPC 405 processors)
• Impractical to sample wide spectrum and digitally filter, decimate, and process bands/signals of interest
– It is possible to construct multiple front ends and use software to process the output of each
– It is possible to have a single front end and use software to provide an efficient, flexible, and dynamic signal processing solution
• Such an ”ideal” radio would not be cost-effective
Software Radio: Myths & Truths

Copyright © 2004 NordNav Technologies AB
• The typical GPS receiver design, with a combination of hardware and software signal processing, is well engineered design
– The high speed signal processing deals with a samples on the order of 4-20 Msps, while the low speed programmable processor deals with pre-processed samples on the order of 1 Ksps
• Current technology allow for the implementation of a real time GNSS software receiver
– Flexible signal processing• Possible to use for new signals and the
• Hybrid GPS/Galileo receivers
– Potenial low-cost alternative for system integrators
– Bandwidth of the signals [sampling frequency] the most important parameter
• Moore’s law can be interpreted to show processing power has and continues to increase exponentially since the 1970’s – so tradeoff changes perspective
Software GNSS Receiver: Feasibility & Comments

Copyright © 2004 NordNav Technologies AB
A Feasible Commercial Software GNSS Receiver Architecture
Pre Amp(LNA)
AGC
DownConverter
A/DConverter
ReferenceOscillator
FrequencySynthesizer
Analog RF Front EndN
2
DigitalBasebandChannel 1
Analog IF Digital IF
Antenna
AcquisitionTracking
NavigationProcessing
Microprocessor/DSP
• Downconversion is used – ADC is situated after the IF stage - Ideally programmable bandwidth & frequency band
• Signal processing function after IF stage are realized in software increased flexibility

Copyright © 2004 NordNav Technologies AB
Two product lines:• PC-based GNSS Receiver :
NordNav-Rxx– Specialized customer applications– High end receiver – End customers in R & D– R25/R30 being shipped now!
• Embedded Receiver : NordNav-Exx Family– Single point fixes/continuous tracking– Designed for a DSP/Embedded processors– Extremely cost effective
(re-use existing processing power in mobile terminal)
General DSP or Microprocessor
Automotive
Mobile Terminals
ExxSW
NordNav Soft GPS

Copyright © 2004 NordNav Technologies AB
NordNav-RXX characteristics
• Complete receivers targeted towards R&D and Test & Verification market segments– Desktop research– Desktop verification
• Specialized customer applications
• Designed to run on an PC platform
• Multiple sensor integration (GPS/INS/dead reckoning), interference investigations, antenna arrays/beamforming etc.
• Record raw IF samples & replay samples

Copyright © 2004 NordNav Technologies AB
NordNav-RXX Architecture
AcqusitionEngine
CorrelatorEngine
DataInterface
Acqusition & Tracking
Navigation
Harddrive
APIUserApp.
SampleStreamer GUI Receiver GUI
GPS Antenna
RF
USBv2
Multibit L1Front End
IF Samples
Microprocessor

Copyright © 2004 NordNav Technologies AB
NordNav-R30 Demonstration
• Receiver will be run on Pentium 1.7 GHz Notebook PC– Replay a recorded datafile from Stockholm
• Unique features briefly demonstrated– 24 channels (typically 14-16 realtime depending on configuration)– Configurable parameters– Add multiple correlators – New feature!– Tracking loop framework – Updated framework– Signal Injection – example study interference effects

Copyright © 2004 NordNav Technologies AB
Baseband Configuration

Copyright © 2004 NordNav Technologies AB
Receiver GUI Examples
Monitor the antenna frequency spectrumMonitor AGClevel
Horizontal scatter plot

Copyright © 2004 NordNav Technologies AB
Real-Time GUI Correlator Plot
• Add multiple correlator pairs
• Each channel can be individually configured
• User can set the tracking pairs & spacing

Copyright © 2004 NordNav Technologies AB
Impact of Tracking Loop Parameters
10 Hz PLL 20 Hz PLL

Copyright © 2004 NordNav Technologies AB
External Tracking Loop Framework 1(2)
NordNavR30
Receiver CloseLoops.dll
CloseLoops API
NordNavR30 GUI
NordNav R30 API
Visual C Framework• User implemented code - dll• Example implementation included
• The user can implement its own discriminators for code & carrier
• Implement its own code and carrier tracking loop
• Excellent for ”aiding” of tracking loops by for example IMU

Copyright © 2004 NordNav Technologies AB
External Tracking Loop Framework 2(2) Updated and added functionality
• Updated values every navigation update rate (not every ms as the accumulators):– Satellite positions– Receiver position & velocity
• Indicator to tell the receiver to NOT try and extract data– For low C/No studies

Copyright © 2004 NordNav Technologies AB
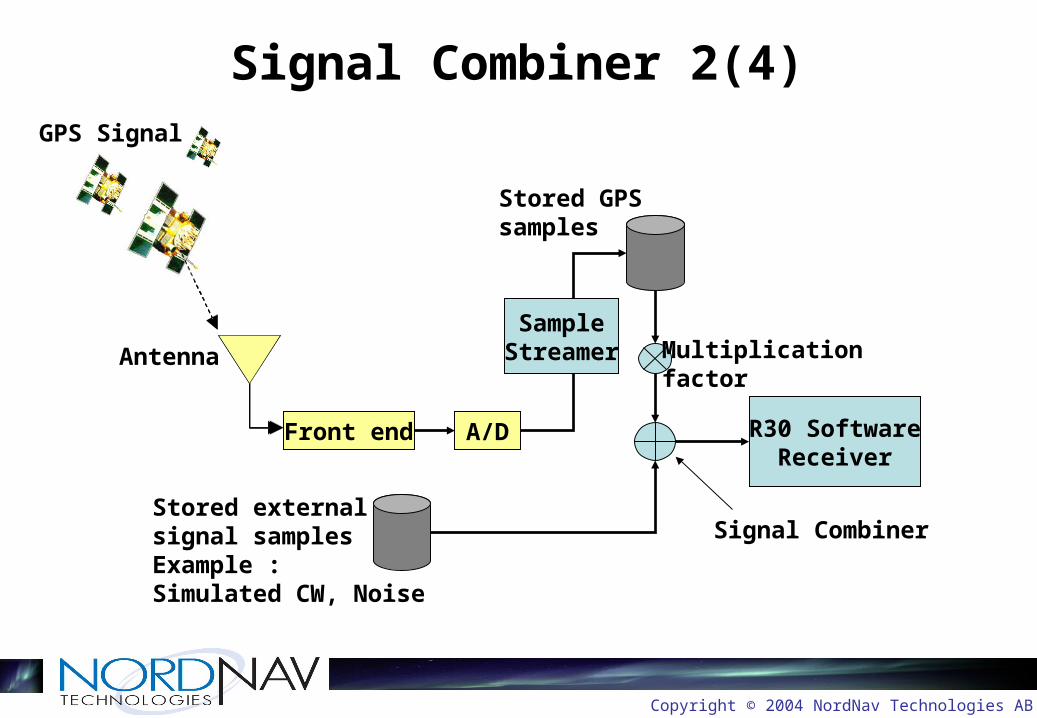
Signal Combiner 1(4)
• Allows to inject a simulated signal into real GPS samples prior receiver processing
• Possibility to study the effect interference signals and jamming scenarios
• The user can implement any signal structure, even GPS signals which the receiver can track– Simulated file : each sample stored as signed char (byte)
Copyright © 2004 NordNav Technologies AB
GPS Signal
Antenna
Front end A/D
Stored GPS samples
Stored external signal samplesExample : Simulated CW, Noise
Multiplicationfactor
R30 SoftwareReceiver
Signal Combiner
SampleStreamer
Signal Combiner 2(4)

Copyright © 2004 NordNav Technologies AB
Signal Combiner 3(4)>> cw_gen(5e5, 1e6, 0.05,
'cw_500kHz.sim')
Included example signal
generation scripts
CW tonenoise

Copyright © 2004 NordNav Technologies AB
Signal Combiner 3(4)
Example of GPS L1 frequency spectrum with a injected 20 dB CW tone (sinusoid) at 500 KHz off L1 frequency

Copyright © 2004 NordNav Technologies AB
New features in this software release
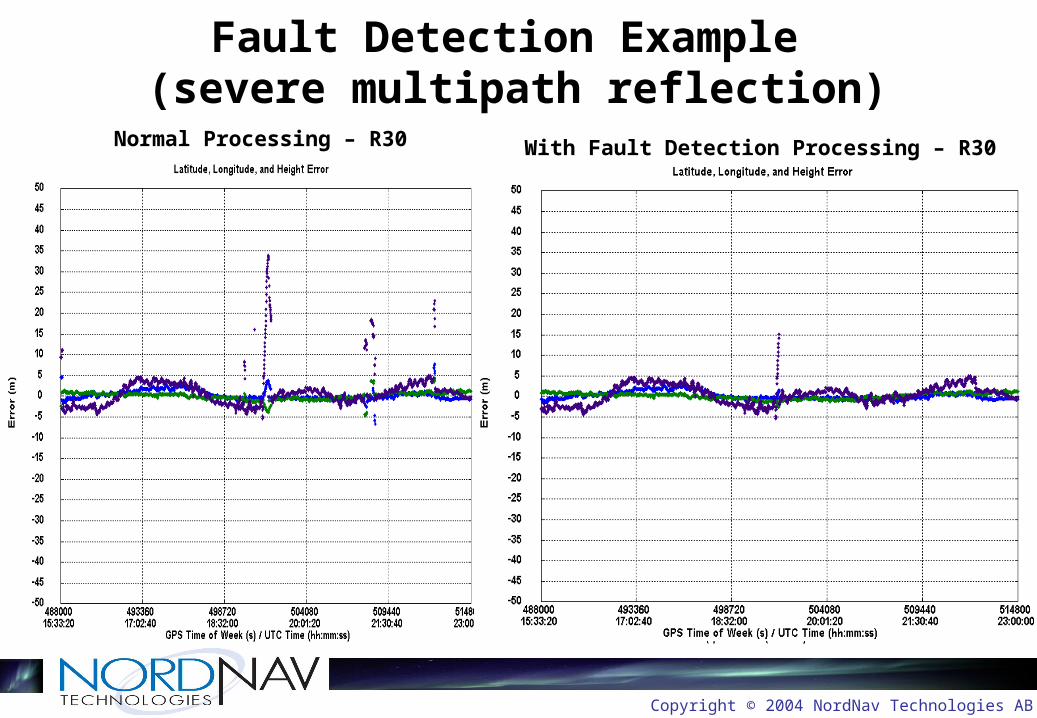
• Fault Detection and isolation• Improved Dynamic performance• Velocity output• Troposphere (same as WAAS model)• 2-D navigation (height fixing)• Almanac• Configuration per channel basis
– Correlators (spacing and numbers)– Tracking loop parameters– Acquisition parameters
• External Tracking Loop Framework updated
Copyright © 2004 NordNav Technologies AB
Fault Detection Example (severe multipath reflection)
Normal Processing – R30 Reference Receiver ProcessingWith Fault Detection Processing – R30
Copyright © 2004 NordNav Technologies AB
Next Major Software Release
• SBAS– Support for WAAS/EGNOS
• Scheduled IF recording• Improved Sensitivity• External Position API
• Next Next Major Software release– Galileo L1 (software IF signal generator & processing)

Copyright © 2004 NordNav Technologies AB
Galileo• Galileo – European ”GPS”. Designed to be independent but
compatible with GPS– Same frequency band as GPS– Different signal structure
• Operational 2008 [2010] – Civil system Great asset for all users with hybrid GPS/Galileo
receivers!• Increase service availability drastically!
• Five different service categories– Open Service (OS) - Free of charge!– Safety of Life (SoL), Commercial services (CS), Search and Rescue (SAR),
Public Regulated Service (PRS)

Copyright © 2004 NordNav Technologies AB
GNSS Frequency Spectrum
Modernized GPS and Glonass signals not included

Copyright © 2004 NordNav Technologies AB
Carrier at 1575.42 MHz (L1)1227.60 MHz (L2)
19 cm (L1)
300 m (CA)
Code at 1.023 Mcps (C/A)10.23 Mcps (P(Y))
Navigation Data at 50 bps 6000 km
GPS Signals

Copyright © 2004 NordNav Technologies AB
Galileo – Open Service SignalL1 Band, BOC(n,m)
PRN Signal
Square Wave
Resulting BOC(m,m) Signal
t
t
t
1
1
1
-1
-1
-1
PRN Signal
Square Wave
Resulting BOC(m,m) Signal
t
t
t
1
1
1
-1
-1
-1

Copyright © 2004 NordNav Technologies AB
GPS and Galileo Sharing L1 Spectrum : C/A and BOC(1,1)
Galileo BOC(1,1) (data bearing signal)• Code length 8184 chips• 1.023 Mhz base frequency (8 ms period time)• 125 Hz data rate (1 code period per data bit)• ~85 % of signal power within ~4 Mhz bandwidth
GPS C/A• Code length 1023 chips• 1.023 MHz chipping rate (1 ms period time)• 50 Hz data rate (20 code periods per data bit)• ~90 % of signal power within ~2 MHz bandwidth
00
0.2
0.4
0.6
0.8
1
Nor
mal
ized
Mag
nitu
de
GPS C/A and GALILEO BOC(1,1) spectrum
GPS C/AGALILEO BOC(1,1)
-6000 -4000 -2000 0 2000 4000 6000-35
-30
-25
-20
-15
-10
-5
0
Frequency Offset (kHz)
Nor
mal
ized
PS
D (d
B)
GPS C/A and GALILEO BOC(1,1) Power Spectral Density
GPS C/AGALILEO BOC(1,1)
~4 MHz BW

Copyright © 2004 NordNav Technologies AB
Conclusion• ”Ideal Software Receiver” is still a dream
– Current technology do not allow for such designs
• However for bandlimited signals, such as GPS/GNSS, software receiver are commercially feasible– Downconversion front end used – Process digital IF samples in software
• Software receivers are receiving market acceptance– Technology not only for research in a laboratory
• Although fantastic for this purpose!– More and more feasible as alternative to traditional Rx– Multi-channnel receivers exists today
• Important technology for Galileo– Hybrid GPS/Galileo L1 receiver for mass market
















