
Software PerformanceOptimisation Group Generating GPU-Accelerated Code From a High-level Domain-...
32
Software Performance Optimisation Group Generating GPU- Accelerated Code From a High-level Domain- specific Language Graham Markall Software Performance Optimisation Group Imperial College London http://www.doc.ic.ac.uk/~grm08 Joint work with David Ham and Paul Kelly October 2009
-
Upload
frederick-morris -
Category
Documents
-
view
219 -
download
3
Transcript of Software PerformanceOptimisation Group Generating GPU-Accelerated Code From a High-level Domain-...

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
p
Generating GPU-Accelerated Code From a High-level Domain-specific Language
Graham MarkallSoftware Performance Optimisation GroupImperial College Londonhttp://www.doc.ic.ac.uk/~grm08
Joint work with David Ham and Paul Kelly
October 2009

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pProblem & Proposal
How do we exploit multicore architectures to improve the performance of the Assembly Phase?
Writing code for new architectures is time-consuming and error-prone
Provide hardware-independent abstraction for the specification of finite element methods.
Future proofing of codeEasier development
Background: Conjugate Gradient GPU Solver 10x faster than one CPU coreSolvers are generic – someone else will solve this problem

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pThis Study
We present a pilot study into using the Unified Form Language to generate CUDA code.
Why bother with part 1? To prove we can speed up assembly using GPUsTo provide a guide for the output we expect from the compilerTo experiment with different performance optimisations
Part 1:1.Nvidia Tesla Architecture & CUDA2.Test Problems3.Translation Methodology4.Performance Optimisations5.Performance Results
Part 2:1.UFL2.UFL Compiler Design3.Test Results4.Discussion

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pNVIDIA Tesla Architecture & CUDA
GT200 Architecture: 1-4GiB RAM
For high performance:Coalescing:
Use many threads (10000+)
Caches:Texture cache (read-only)Shared memory
64B window
16 threads (half-warp)
Data transfer
Data transfer

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pThe Test Problems
Test_laplacian: Solves ∆u = f on unit squareAnalytical solution: Allows us to examine the accuracy of the computed solution
Test_advection_diffusion:
Advection-Diffusion is more representative:Time-dependent, nonlinear multiple assemble/solve

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pFrom Fortran to CUDA (Test_laplacian)
Assembly Loop in Fortran:
Assembly Loop in CUDA:
1 Element
All Elements
do ele=1,num_ele call assemble(ele,A,b)end do
call petsc_solve(x,A,b)
call gpu_assemble()
call gpucg_solve(x)

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pFrom Fortran to CUDA (Adv.-Diff.)
Original:AssembleSolveOutput of solve input to next Assemble
CUDA:Avoid transferring the solution at every iterationUpload initial conditionsIterateTransfer solution when required

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
p
CoalescingMaximise memorybandwidth
Performance Optimisations
...(x1,y1)
(x2,y2) (x3,y3)
...
123
n-2n-1
n
x1 y1 x2 y2 x3 y3 1 2 3
x1 y1
x2
y2
x3
y3
n-2 n-1 n

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
p
CoalescingMaximise memorybandwidth
Specialisation of Kernels (reduced register usage)
Performance Optimisations
for(int x=0; x<nodes; x++) { for(int y=0; y<nodes; y++) { ...; }}
for(int x=0; x<3; x++) { for(int y=0; y<3; y++) { ...; }}
...(x1,y1)
(x2,y2) (x3,y3)
...
123
n-2n-1
n
x1 y1 x2 y2 x3 y3 1 2 3
x1 y1
x2
y2
x3
y3
n-2 n-1 n

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
p
CoalescingMaximise memorybandwidth
Specialisation of Kernels (reduced register usage)
Texture Memory for matrix sparsity
Performance Optimisations
for(int x=0; x<nodes; x++) { for(int y=0; y<nodes; y++) { ...; }}
for(int x=0; x<3; x++) { for(int y=0; y<3; y++) { ...; }}
...(x1,y1)
(x2,y2) (x3,y3)
...
123
n-2n-1
n
x1 y1 x2 y2 x3 y3 1 2 3
x1 y1
x2
y2
x3
y3
n-2 n-1 n
col_idx
val
row_ptr

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pPerformance Results
For Advection-Diffusion problem. Test setup:Nvidia 280GTX – 1GB RAM (use Tesla C1060 for 4GB)Intel Core 2 Duo E8400 @ 3.00GHz2GB RAM in host machineIntel C++ and Fortran Compilers V10.1
V11.0 suffers from bugs and cannot compile FluidityCPU Implementations compiled with –O3 flagsCUDA Implementation compiled using NVCC 2.2
Run problem for 200 timestepsIncreasingly fine meshes
Increasing element countFive runs of each problem
Averages reportedDouble Precision computations

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pAdvection Diffusion Assembly Time

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pSpeedup in the Assembly Phase

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pOverall Speedup (Assemble & Solve)

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pProportion of GPU Time in each Kernel
Which kernels should we focus on optimising?
Addto kernels: 84% of execution time

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pThe Impact of Atomic Operations
Colouring Optimisation on GPUs: [1] D. Komatitsch, D.Michea and G. Erlebacher. Porting a high-order finite-element earthquake modelling application to Nvidia graphics cards using CUDA. J. Par. Dist. Comp., 69(5):451-460, 2009

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pSummary of Part 1
8x Speedup over 2 CPU Cores for assembly6x Speedup overallFurther performance gains from:
Colouring Elements & Non-atomic ops [1]Alternative matrix storage formatsFusing kernels [2], Mesh partitioning [3]
Fusing kernels: [2] J. Filipovic, I. Peterlik and J. Fousek. GPU Acceleration of Equations Assembly in Finite Elements Method – Preliminary Results. In SAAHPC: Symposium on Application Accelerators in HPC, July 2009.Mesh partitioning: [3] A. Klockner, T. Warburton, J. Bridge and J. S. Hesthaven. Nodal Discontinuous Galerkin methods on graphics processors. Journal of Computational Physics, in press, 2009.

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
p
Solving:Weak form:
(Ignoring boundaries)
Close to mathematical notationNo implementation details
Allows code generation for multiple backends and choice of optimisations to be explored.
Part 2: A UFL [4] Example (Laplacian)
Psi = state.scalar_fields(“psi”)v=TestFunction(Psi)u=TrialFunction(Psi)f=Function(Psi, “sin(x[0])+cos(x[1])”)A=dot(grad(v),grad(u))*dxRHS=v*f*dxSolve(Psi,A,RHS)
[4] M. Alnaes and Anders Logg. Unified Form Language Specification and User’s Manual. http://www.fenics.org/pub/documents/ufl/ufl-user-manual/ufl-user-manual.pdf Retrieved 15 Sep 2009.
So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
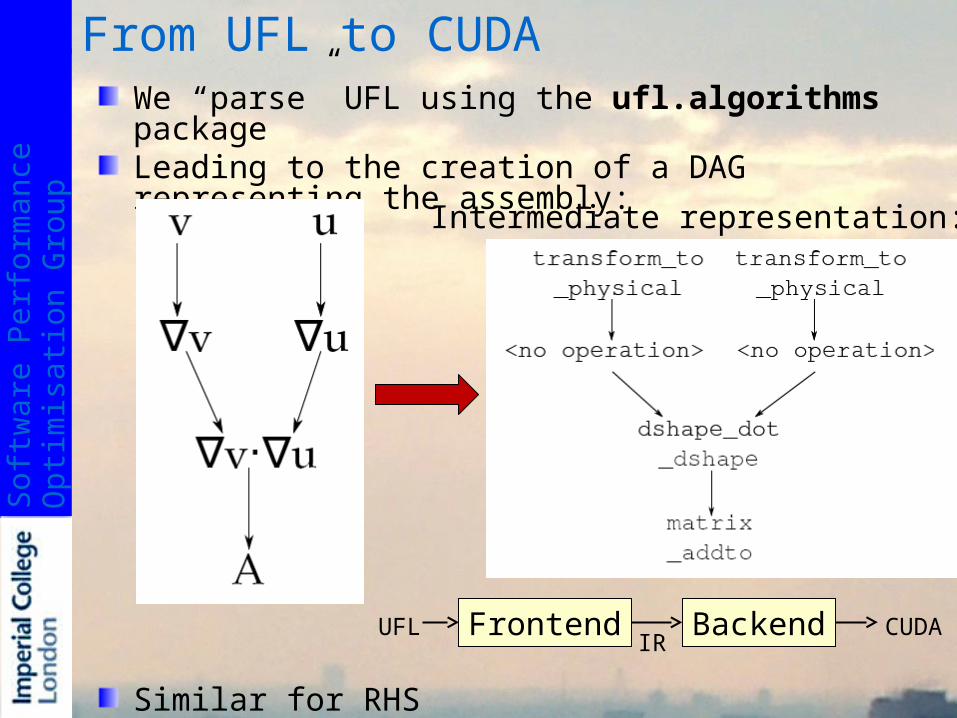
pFrom UFL to CUDA
We “parse” UFL using the ufl.algorithms packageLeading to the creation of a DAG representing the assembly:
Similar for RHS
Intermediate representation:
Frontend BackendUFLIR
CUDA

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
p
Hand Translation: Generated Code:
TestingBackend (example):stringList *params = new stringList();(*params).push_back(string("val"));(*params).push_back(string("size_val"));(*params).push_back(string("ele_psi"));(*params).push_back(string("lmat"));(*params).push_back(string("n"));launchList.push_back( kernelLaunch("matrix_addto",params));
Frontend:psi = state.scalar_fields("psi")v = TestFunction(P)u = TrialFunction(P)f = Function(P)f.name="shape_rhs"A = dot(grad(v),grad(u))*dxsolve(P, A, f)

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pTesting - continued
Helmholtz equation:Weak form:
A=(dot(grad(v), grad(u))+(20)*dot(v,u))*dxAdd extra calls to shape_shape and matrix_addto
FEniCS Dolfin solution: Generated code solution:

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pConclusions
We obtain speedups of 8x over 2 core CPU in the assembly phase using CUDA
An overall speedup of 6x over 2 cores
Generation of CUDA code from UFL source is feasible
UFL is “future proof”UFL is easier to use than CUDA, Fortran etc.Allows automated exploration of optimisationsOther backends (Cell, multicore CPU, Larrabee etc.) should be possible

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pFurther workOn the UFL Compiler:
Support for a more complete subset of UFLDevelopment of a more expressive intermediate representation
Facilitates the development of other backends Generation of kernels from IR
Automatic tuning
On the Conjugate Gradient Solver:Integration with blocked SpMV implementation [5]
Expect: further performance improvements
Blocked SpMV: [5] A. Monakov and A. Avetisyan. Implementing Blocked Sparse Matrix-Vector Multiplication on Nvidia GPUs. In SAMOS IX: International Symposium on Systems, Architectures, Modeling and Simulation, July 2009.

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pSpare Slides

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pTest Advection Diffusion UFL
Advection:T=state.scalar_fields(Tracer)U=state.vector_fields(Velocity)UNew=state.vector_fields(NewVelocity)
# We are solving for the Tracer, T.t=Function(T)p=TrialFunction(T)q=TestFunction(T)
#The value of the advecting velocity U is known.u=Function(U)unew=Function(UNew)
#Mass matrix.M=p*q*dx
#Solve for T1-T4.rhs=dt*dot(grad(q),u)*t*dxt1=solve(M,rhs)rhs=dt*dot(grad(q),(0.5*u+0.5*unew))*(t+0.5*t1)*dxt2=solve(M,rhs)rhs=dt*dot(grad(q),(0.5*u+0.5*unew))*(t+0.5*t2)*dxt3=solve(M,rhs)
#Solve for T at the next time step.rhs=action(M,t) + 1.0/6.0*t1 + 1.0/3.0*t2 + 1.0/3.0*t3 + 1.0/6.0*t4t=solve(M,t)
Diffusion:mu=state.tensor_fields(TracerDiffusivity)i,j=indices(2)M=p*q*dxd=-grad(q)[i]*mu[i,j]*grad(p)[j]*dxA=m-0.5*drhs=action(M+0.5*d,t)T=solve(A,rhs)

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pMemory Bandwidth Utilisation
Orange: Using Atomic operationsBlue: Using non-atomic operations

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pProportion of GPU Time in each Kernel
Orange: Using Atomic operationsBlue: Using non-atomic operations

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pAssembly Throughput

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pCode Generation
List of variables, kernels and parameters passed to backend.Using the ROSE Compiler Infrastructure [6].
CUDA Keywords (__global__, <<<...>>> notation) inserted as arbitrary strings.
AST
gpu_assemble.cu
InitialisationcudaMalloc()cudaBindTexture()cudaMemcpy()
StreamingcudaMemcpy()
Assemblykernel<<<.>>>()
FinalisationcudaFree()cudaUnbindTexture()
DeclarationsInt, double, ...

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pNVIDIA Tesla Architecture & CUDA
GT200 Architecture10 TPCs8 Banks of DRAM: 1-4GiB
y = αx + y in C:
CUDA Kernel:
__global__ void daxpy(double a, double* x, double* y, int n) { for (int i=T_ID; i<n; i+=T_COUNT) y[i] = y[i] + a*x[i];}
void daxpy(double a, double* x, double* y, int n) { for (int i=0; i<n; i++) y[i] = y[i] + a*x[i];}

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pVariable naming
How do we ensure the output of a kernel is correctly input to successive kernels? Consistently invent names.
Psi = state.scalar_fields(“psi”)v=TestFunction(Psi)u=TrialFunction(Psi)f=Function(Psi, “sin(x[0])+cos(x[1])”)A=dot(grad(v),grad(u))*dxRHS=v*f*dxSolve(Psi,A,RHS)
Output: dshape_psi
Input: dshape_psiOutput: lmat_psi_psi
Input: lmat_psi_psi

So
ftwa
re P
erf
orm
an
ce
Op
timis
atio
n G
rou
pMemory Bandwidth Utilisation


















