soft-tissue-mechanics-labs Documentation
29
soft-tissue-mechanics-labs Documentation Release 3.0 Martyn Nash, Hugh Sorby, Thiranja Prasad Babarenda Gamage Mar 19, 2021
Transcript of soft-tissue-mechanics-labs Documentation

soft-tissue-mechanics-labsDocumentation
Release 3.0
Martyn Nash, Hugh Sorby, Thiranja Prasad Babarenda Gamage
Mar 19, 2021


Contents
1 Introduction 3
2 Using OpenCMISS 52.1 Installing OpenCMISS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Starting OpenCMISS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Running models in OpenCMISS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Lab 1: Analysing deformation in isotropic materials 73.1 Section 1: Solving mechanics models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.2 Section 2: Strain analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4 Lab 2: Stress transformations 134.1 Revision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134.2 Section 1: Transforming from 2nd Piola-Kirchhoff to Cauchy stress tensor components . . . . . . . . 134.3 Section 2: Transforming stresses between rotated coordinate systems . . . . . . . . . . . . . . . . . 14
5 Lab 3: Analysing stresses in anisotropic materials 215.1 Revision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215.2 Section 1: Deriving components of the stress tensor . . . . . . . . . . . . . . . . . . . . . . . . . . 215.3 Section 2: Analysing stresses during equi-biaxial deformation . . . . . . . . . . . . . . . . . . . . . 22
6 Indices and tables 25
i

ii

soft-tissue-mechanics-labs Documentation, Release 3.0
Contents:
Contents 1

soft-tissue-mechanics-labs Documentation, Release 3.0
2 Contents

CHAPTER 1
Introduction
Welcome to the soft tissue mechanics labs, which will take you through the following topics:
• Lab 1: Analysing deformation in isotropic materials
• Lab 2: Stress transformations
• Lab 3: Analysing stresses in anisotropic materials
These labs make use of the OpenCMISS computational modelling software that will be outlined in the next section.
3

soft-tissue-mechanics-labs Documentation, Release 3.0
4 Chapter 1. Introduction

CHAPTER 2
Using OpenCMISS
This lab will make use of the OpenCMISS computational modelling software being developed at the Auckland Bio-engineering Institute. This software includes a computational back-end named Iron that runs simulations, and a font-end graphical user interface (GUI) named Neon that is used to visualise the results. For the purpose of these labs,we will only be interacting with the Neon GUI that has been set up with a series of simple computational models foranalysing stresses and strains in isotropic and anisotropic materials.
2.1 Installing OpenCMISS
An OpenCMISS installer for Windows 10 (64-bit) can be downloaded from this link.
2.2 Starting OpenCMISS
Once installed, OpenCMISS can be run from the start menu. When the program starts, you will be prompted to selecta project as shown in the screenshot below.
5

soft-tissue-mechanics-labs Documentation, Release 3.0
Select a project and click ok. A drop down menu will appear listing a series of models that will be analysed during thecourse of the lab.
2.3 Running models in OpenCMISS
Select a model from the drop down menu and click “Run” as shown in the screenshot below.
To run another model, select “Problem” from the menu bar.
To open another project, select the new project button on the left hand side of the menu bar.
6 Chapter 2. Using OpenCMISS

CHAPTER 3
Lab 1: Analysing deformation in isotropic materials
The objective of this lab is to analyse large deformation kinematics with respect to reference coordinates in isotropicmaterials, for with the stiffness properties are the same in all directions. The deformations you will be analysinginclude:
• Model 1 (Uniaxial extension of unit cube)
• Model 2 (Equibiaxial extension of unit cube)
• Model 3 (Simple shear of unit cube)
• Model 4 (Shear of unit cube)
• Model 5 (Extension and shear of unit cube)
Before starting this lab, please read the Using OpenCMISS section to familiarise yourself with the software used inthis lab.
3.1 Section 1: Solving mechanics models
1. Start OpenCMISS and load the “Kinematics analysis” project (described in the Starting OpenCMISS section).
2. Select “Model 1 (uniaxial extension of unit cube)” from the drop down menu and click the “Run” button (screen-shots of this procedure are shown in the Running models in OpenCMISS section).
3. After a short time, the model should have solved and the simulation results pane will open, as shown in thescreenshot below.
7

soft-tissue-mechanics-labs Documentation, Release 3.0
The simulation results are shown in the 3D graphics window. In this graphical window:
• the undeformed (reference) configuration of the unit cube is shown in red; and
• the deformed (current) configuration is shown in green (𝑥1, 𝑥2, 𝑥3 components of the deformedcoordinates are shown at the corners of the model).
The model in the 3D graphics window can be rotated (click-drag-left-mouse button), translated (click-drag-middle-mouse button), or zoomed (click-drag-right-mouse button).
3.2 Section 2: Strain analysis
4. Write down the coordinate equations that describe this deformation in the form 𝑥 = 𝑓(𝑋), i.e.:
𝑥1 = 𝑎𝑋1 + 𝑏𝑋2 + 𝑐𝑋3
𝑥2 = 𝑑𝑋1 + 𝑒𝑋2 + 𝑓𝑋3
𝑥3 = 𝑔𝑋1 + ℎ𝑋2 + 𝑖𝑋3
where the constants 𝑎 to 𝑖 need to be identified from the undeformed and deformed coordinates of themodel shown in the graphics window.
Note: The undeformed (reference) configuration is the unit cube shown in red.
5. Determine the deformation gradient tensor (𝐹 = 𝜕𝑥𝜕𝑋 ).
6. Evaluate the determinant of 𝐹 to see whether the material is incompressible (i.e. maintains constant volume).
8 Chapter 3. Lab 1: Analysing deformation in isotropic materials

soft-tissue-mechanics-labs Documentation, Release 3.0
7. Determine:
• right Cauchy-Green deformation tensor (𝐶),
• 𝐼1 = 𝑡𝑟𝑎𝑐𝑒(𝐶),
• 𝐼3 = 𝑑𝑒𝑡(𝐶), and the
• Green-Lagrange strain tensor (𝐸).
8. Check your answers to 5-7 against the simulation results.
Note: Click and drag on the right hand boundary of the 3D graphics window to view the simulationresults as shown in the screenshots below:
3.2. Section 2: Strain analysis 9

soft-tissue-mechanics-labs Documentation, Release 3.0
Note: In some cases, an apparent zero may be preceded by a negative sign. This value should still betreated as zero (i.e. ignore the negative sign).
9. Select “Problem” from the menu bar and repeat steps 2-8 for the remaining models in the kinematics analysisproject:
• Model 2 (Equibiaxial extension of unit cube)
• Model 3 (Simple shear of unit cube)
• Model 4 (Shear of unit cube)
• Model 5 (Extension and shear of unit cube)
3.2.1 Questions to consider
After you have completed the above exercises, consider the following questions:
a. What do the off-diagonal components of 𝐹 represent?
b. In Model 1, why are 𝐸22 and 𝐸33 negative? What does this represent?
c. In Model 4, what does the equality of 𝐹11 and 𝐹33 represent? Why is 𝐹22 less than 1.
Note: By the end of this lab you should be able to:
• analyse large deformation kinematics with respect to reference coordinates, i.e. by determining 𝐹 , 𝐶, invariantsof 𝐶, and 𝐸.
10 Chapter 3. Lab 1: Analysing deformation in isotropic materials

soft-tissue-mechanics-labs Documentation, Release 3.0
• relate the components of the deformation gradient tensor to the underlying deformation.
• determine if a deformation is incompressible.
3.2. Section 2: Strain analysis 11

soft-tissue-mechanics-labs Documentation, Release 3.0
12 Chapter 3. Lab 1: Analysing deformation in isotropic materials

CHAPTER 4
Lab 2: Stress transformations
The objective of this lab is to:
1. transform 2nd Piola-Kirchhoff stresses to Cauchy stresses.
2. transform stresses and strains between reference and material (fibre) coordinates.
The deformations that will be considered in this lab include uniaxial and equi-biaxial extension of a unit cube.
4.1 Revision
Before starting this lab, please be sure to have completed Lab 1: Analysing deformation in isotropic materials.
4.2 Section 1: Transforming from 2nd Piola-Kirchhoff to Cauchystress tensor components
1. Start OpenCMISS and load the “Kinematics analysis” project. Select “Model 1 (Uniaxial extension of unitcube)” from the drop down menu and click the “Run” button.
2. Open the simulation results pane and use the components of the 2nd Piola-Kirchhoff stress tensor (𝑇 ) and thedeformation gradient tensor (𝐹 ) to determine the Cauchy components of the stress tensor (Σ) (Don’t forget theJacobian (𝐽)). See this link for an example on how to open the simulation results pane.
Note: Hint: See equations in Section 3.1 of Nash and Hunter (2007).
3. Select “Problem” from the menu bar and repeat step 1-2 for the remaining models in the kinematics analysisproject.
13

soft-tissue-mechanics-labs Documentation, Release 3.0
Note: By the end of this section you should be able to:
• derive the Cauchy stress tensor components from the second Piola-Kirchhoff stress tensor components using thedeformation gradient tensor.
4.3 Section 2: Transforming stresses between rotated coordinatesystems
4.3.1 Uniaxial extension of a unit cube
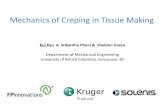
1. Consider the uniaxial deformation shown in the figure below, where a set of material axes are aligned with thespatial reference axes. In the following figure, the gold arrows represent the first material axis (for example, thismight be a the orientation of a collagen fibre within tissue):
In the screenshot:
• the undeformed (reference) configuration of the object (a unit cube) is shown in red;
• the deformed (current) configuration of the object is shown in green; and
• the gold arrows indicate the direction of the first material (fibre) axis in the object. In general,the microstructural fibres are not necessarily parallel to the direction of stretch or load.
This deformation is described by the following equations:
𝑥1 =3
2𝑋1 𝑥2 =
√︂2
3𝑋2 𝑥3 =
√︂2
3𝑋3
In all figures, 𝑥 represents 𝑋1 and 𝑥1, 𝑦 represents 𝑋2 and 𝑥2, and 𝑧 represents 𝑋3 and 𝑥3.
2. Write down (see Lab 1):
• the deformation gradient tensor, 𝐹 = 𝜕𝑥𝜕𝑋
• the right Cauchy-Green deformation tensor, 𝐶 and
14 Chapter 4. Lab 2: Stress transformations

soft-tissue-mechanics-labs Documentation, Release 3.0
• the Green-Lagrange strain tensor. Label this as 𝐸𝑟𝑒𝑓 (to indicate that it is defined with respect tothe reference spatial coordinates).
Note: This is the same deformation used in Model 1 in Lab 1, so you should not need to re-do thesecalculations.
For this particular model, the second Piola-Kirchhoff stress tensors with respect to both the referencespatial, and material fibre axes, are:
𝑇𝑟𝑒𝑓 = 𝑇𝑓𝑖𝑏 =
⎡⎣440.5 0 00 0 00 0 0
⎤⎦(Note: While the uniaxial deformation in Model 1 of Lab 1 is the same as that considered here, the stresstensors are different between thse two labs because different stress-strain constitutive relations havebeen used - this difference will be covered in Lab 3).
Uniaxial deformation with respect to rotated material axes
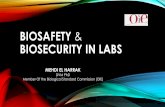
3. Now consider the same deformation, except that the material fibre axes are no longer aligned with the referencespatial axes. They are now rotated anti-clockwise by an angle of 𝜃 = 30 degrees from the 𝑋1 axis (in the 𝑋1-𝑋2
plane), as shown in the figure below.
For the following exercises, you are asked to transform strain and stress tensors between the referencespatial coordinates and the material fibre coordinate systems using the generalised rotational transformgiven by:
𝐸𝑓𝑖𝑏 = 𝑄𝑇𝐸𝑟𝑒𝑓𝑄
where 𝐸𝑟𝑒𝑓 and 𝐸𝑓𝑖𝑏 are Green-Lagrange strain tensors defined with respect to the reference spatial andmaterial fibre axes, respectively, and 𝑄 is the orthogonal rotation matrix, which for this example is defined
4.3. Section 2: Transforming stresses between rotated coordinate systems 15

soft-tissue-mechanics-labs Documentation, Release 3.0
by:
𝑄 =
⎡⎣cos(𝜃) − sin(𝜃) 0sin(𝜃) cos(𝜃) 0
0 0 1
⎤⎦
4. Calculate the components of the Green-Lagrange strain tensor with respect to the material fibre axes (𝐸𝑓𝑖𝑏) viathe appropriate tensor transformation (see Step 3).
5. Explain similarities/differences between 𝐸𝑓𝑖𝑏 and 𝐸𝑟𝑒𝑓 for this model.
6. The relationship between second Piola-Kirchhoff stress tensors defined with respect to reference spatial andmaterial fibre coordinates is (note the similarity to Step 3):
𝑇 𝑓𝑖𝑏 = 𝑄𝑇𝑇 𝑟𝑒𝑓𝑄
Invert this equation, and then calculate the second Piola-Kirchhoff stress components with respect to thereference spatial axes (𝑇 𝑟𝑒𝑓 ) from the following components of the second Piola-Kirchhoff stress tensorwith respect to the material fibre axes (𝑇 𝑓𝑖𝑏):
𝑇𝑓𝑖𝑏 =
⎡⎣ 330.345 −190.725 0−190.725 110.115 0
0 0 0
⎤⎦
7. Explain similarities/differences between 𝑇 𝑓𝑖𝑏 and 𝑇 𝑟𝑒𝑓 for this model.
8. What would you expect from the analysis in steps 4-7 if the fibre angle was changed from 𝜃 = 30 degrees to𝜃 = 45 degrees, or to 𝜃 = 90 degrees for this model? Explain the differences/similarities of the stress tensors𝑇 𝑓𝑖𝑏 and 𝑇 𝑟𝑒𝑓 for this uniaxial deformation model.
Note: You should not need to do any calculations to answer this questions, but if you would like the extrapractice, perform steps 4-7 using:
𝜃 = 45 degrees, where the second Piola-Kirchhoff stress tensor with respect to the material fibre axes is:
𝑇𝑓𝑖𝑏 =
⎡⎣ 220.2 −220.2 0−220.2 220.2 0
0 0 0
⎤⎦and/or 𝜃 = 90 degrees, where the second Piola-Kirchhoff stress tensor with respect to the material fibreaxes is:
𝑇𝑓𝑖𝑏 =
⎡⎣0 0 00 440.5 00 0 0
⎤⎦
Here are the solutions to Steps 1-8.
16 Chapter 4. Lab 2: Stress transformations

soft-tissue-mechanics-labs Documentation, Release 3.0
4.3.2 Equi-biaxial extension of a unit cube
9. Start OpenCMISS and load the stress analysis project (described in the Starting OpenCMISS section).
10. Select “Model 1 (Equi-biaxial extension of unit cube, 0 degree fibre rotation)” from the drop down menu andclick the “Run” button (screenshots of this procedure are shown in the Running models in OpenCMISS section).
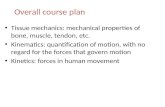
11. After a short time, the model should have solved and the simulation results will appear in the 3D graphicswindow as shown in the screenshot below.
In this graphical window:
• the undeformed (reference) configuration of the unit cube is shown in red, and
• the deformed (current) configuration is shown in green (𝑥1, 𝑥2, 𝑥3 components of the deformedcoordinates are shown at the corners of the model.
• ignore the gold arrows for now - these will be needed later.
The model in the 3D graphics window can be rotated (click-drag-left-mouse button), translated (click-drag-middle-mouse button), or zoomed (click-drag-middle-mouse button).
12. This equi-biaxial deformation is incompressible (i.e. maintains constant volume) described by the equations:
𝑥1 =5
4𝑋1 𝑥2 =
5
4𝑋2 𝑥3 =
16
25𝑋3
13. Write down:
• the deformation gradient tensor (𝐹 = 𝜕𝑥𝜕𝑋 ),
• the right Cauchy-Green deformation tensor (𝐶), and
4.3. Section 2: Transforming stresses between rotated coordinate systems 17

soft-tissue-mechanics-labs Documentation, Release 3.0
• Green-Lagrange strain tensor (𝐸) (label this 𝐸𝑟𝑒𝑓 ).
Note: This is the same deformation used in Model 2 of Lab 1, so you should not need to re-do thesecalculations.
Equi-biaxial deformation with respect to rotated material fibre axes
14. Return to the model selection drop down menu and select/run “Model 3 (Equi-biaxial extension of unit cube, 30degree fibre rotation)”. This model is similar to the previous models, except that the material fibre axes are nolonger aligned with the reference (spatial) axes. For this model, the material fibre axis is rotated anti-clockwiseby an angle of 𝜃 = 30 degrees from the 𝑋1 axis (in the 𝑋1-𝑋2 plane). When visualising these models, the goldarrows in the graphics window indicate the direction of the first material fibre axis (along which the first materialcoordinate is defined), and the second material fibre axis (not shown) is perpendicular to the gold arrow but lieswithin 𝑋1-𝑋2 plane.
15. Determine the Green-Lagrange strain tensor components with respect to the material fibre axes (𝐸𝑓𝑖𝑏) using theapproach in Section 2.
16. Check your answers to Step 15 against the simulation results from OpenCMISS.
Note: Drag the right edge of the 3D graphics window to reveal the stress and strain tensor componentsassociated with the simulation in material fibre and reference spatial coordinates. See this link for anexample on how to open this pane.
17. Explain similarities/differences between 𝐸𝑓𝑖𝑏 and 𝐸𝑟𝑒𝑓 for this model.
18. From the solution output, write down 𝑇 𝑓𝑖𝑏 (the second Piola-Kirchhoff stress tensor with respect to the materialfibre axes). Use this to determine the second Piola-Kirchhoff stress components with respect to the referencespatial coordinate axes (𝑇 𝑟𝑒𝑓 ) via the approach Section 2.
19. Check your answers to Step 18 against the simulation results.
20. Explain similarities/differences between 𝑇 𝑓𝑖𝑏 and 𝑇 𝑟𝑒𝑓 for this model.
21. What would you expect from the analysis in steps 15-20 if the fibre angle was changed from 𝜃 = 30 de-grees to 𝜃 = 45 degrees, or to 𝜃 = 90 degrees for this equi-biaxial deformation model? Explain the dif-ferences/similarities between the two strain tensors for this model. Then explain the differences/similaritiesbetween the two stress tensors for this model.
Note: You should not need to do any calculations to answer this questions. It is fine to do so if you wouldlike some extra practice - just perform steps 15-20 with 𝜃 = 45 degrees by selecting the Model 4 thenModel 6 from the “Run” menu.
18 Chapter 4. Lab 2: Stress transformations

soft-tissue-mechanics-labs Documentation, Release 3.0
Here are the solutions to Step 21.
4.3.3 Questions to think about:
After you have completed the exercises above, consider the following questions:
a. How do changes in 𝐸𝑟𝑒𝑓 for different fibre angles (𝜃) in the equi-biaxial deformation compare with the changesseen in the uniaxial deformation.
b. How do changes in 𝐸𝑓𝑖𝑏 for different fibre angles (𝜃) in the equi-biaxial deformation compare with the changesseen in the uniaxial deformation.
c. How do changes in 𝑇 𝑟𝑒𝑓 for different fibre angles (𝜃) in the equi-biaxial deformation compare with the changesseen in the uniaxial deformation.
d. How do changes in 𝑇 𝑓𝑖𝑏 for different fibre angles (𝜃) in the equi-biaxial deformation compare with the changesseen in the uniaxial deformation.
e. Will the invariants of 𝐶 be the same or different when calculated with respect to reference spatial or materialfibre coordinates?
Note: By completing this lab, you should be able to:
• convert between 2nd Piola-Kirchhoff and Cauchy stress tensors.
• analyse large deformation kinematics with respect to reference spatial or rotated material fibre coordinates, andconvert between them.
• analyse stress tensors with respect to reference spatial or rotated material fibre coordinates, and convert betweenthem.
4.3. Section 2: Transforming stresses between rotated coordinate systems 19

soft-tissue-mechanics-labs Documentation, Release 3.0
20 Chapter 4. Lab 2: Stress transformations

CHAPTER 5
Lab 3: Analysing stresses in anisotropic materials
The objective of this lab is to learn how to analyse anisotropic constitutive equations and stresses defined with respectto a material coordinate system.
5.1 Revision
Before starting this lab, please be sure to have completed:
a. Lab 1: Analysing deformation in isotropic materials, and
b. Lab 2: Stress transformations.
Section 2 of Lab 2 demonstrated how rotating the material-fibre axis with respect to the reference axes influences thecomponents of the stress tensor. For the model in Section 2 of Lab 2, which considers an isotropic cube subject toequi-biaxial deformation, remind yourself:
• What happened to the components of the stress tensor as the material-fibre axis was rotated? Why?
All of the analyses in the present lab will be based on the equi-biaxial deformation described in Section 2 of Lab 2.The difference here is that we will now consider anisotropic mechanical properties that describe different stress-strainresponse alonf the different material axes.
5.2 Section 1: Deriving components of the stress tensor
1. Consider the following exponential constitutive relation, which is used to describe the distortional mechanicalresponse of the cube considered in this lab:
𝑊𝐼 =𝑐12(𝑒𝑄 − 1)
21

soft-tissue-mechanics-labs Documentation, Release 3.0
where
𝑄 =𝑐𝑓𝑓𝐸2𝑓𝑓 + 𝑐𝑠𝑠𝐸
2𝑠𝑠 + 𝑐𝑛𝑛𝐸
2𝑛𝑛+
2𝑐𝑓𝑠(1
2(𝐸𝑓𝑠 + 𝐸𝑠𝑓 ))
2 + 2𝑐𝑓𝑛(1
2(𝐸𝑓𝑛 + 𝐸𝑛𝑓 ))
2 + 2𝑐𝑛𝑠(1
2(𝐸𝑛𝑠 + 𝐸𝑠𝑛))
2
Differentiate this strain energy density function with respect to each of the nine Green-Lagrange strain components(𝐸𝛼𝛽), where 𝛼 and 𝛽 each represent one of the microstructural material coordinates, (𝑓, 𝑠, 𝑛). Thus, derive generalisedanalytical expressions for the nine distortional components of the second Piola-Kirchhoff stress tensor in terms ofthe strain components and the material constants: 𝑐1, 𝑐𝑓𝑓 , 𝑐𝑠𝑠, 𝑐𝑛𝑛, 𝑐𝑓𝑠, 𝑐𝑓𝑛, 𝑐𝑛𝑠.
Note:
• At this stage, do not substitute any values for the strain components nor constants.
• Recognising the similarity of terms should simplify this task.
• Don’t forget the chain rule when differentiating the exponential.
5.3 Section 2: Analysing stresses during equi-biaxial deformation
5.3.1 Analysing stresses with respect to the reference coordinates
2. Using OpenCMISS, load the stress analysis project and run Model 1. (The procedure for running this simulationin OpenCMISS is outlined in steps 1-3 in Section 2 of Lab 2). See this link for an example on how to open thesimulation results pane.
3. The Model 1 simulation uses the above constitutive equation with the following material constants:
𝑐1 = 0.0475 𝑘𝑃𝑎
𝑐𝑓𝑓 = 𝑐𝑠𝑠 = 𝑐𝑛𝑛 = 𝑐𝑓𝑠 = 𝑐𝑓𝑛 = 𝑐𝑛𝑠 = 15.25
Substitute the Green-Lagrange strain components (𝐸𝑟𝑒𝑓 ) for this equi-biaxial deformation into your an-alytical expressions from Step 1 of this lab to determine values for the distortional components of thesecond Piola-Kirchhoff stress tensor. Verify that these distortional stresses are:
𝑇 𝑓𝑓_𝑑𝑖𝑠𝑡𝑟𝑒𝑓 = 𝑇 𝑠𝑠_𝑑𝑖𝑠𝑡
𝑟𝑒𝑓 = 8.59 𝑘𝑃𝑎
Note:
• Hint: in the steps below, you will use your your analytical equations from step 1 repeatedly to donumber of calculations (with different parameters), so you might consider encoding your equationsusing a high level programming language (python, C, Matlab, etc) or a spreadsheet.
• Hint: 𝑄 = 3.74.
• Your calculations for 𝑇 𝑓𝑓_𝑑𝑖𝑠𝑡𝑟𝑒𝑓 and 𝑇 𝑠𝑠_𝑑𝑖𝑠𝑡
𝑟𝑒𝑓 could be within ±0.02 𝑘𝑃𝑎 of the solution stated abovedue to round off errors.
22 Chapter 5. Lab 3: Analysing stresses in anisotropic materials

soft-tissue-mechanics-labs Documentation, Release 3.0
• These distortional components of the second Piola-Kirchhoff stress tensor (e.g. 𝑇 𝑓𝑓_𝑑𝑖𝑠𝑡𝑟𝑒𝑓 ) do
not match the stress values shown in the OpenCMISS results panel because the OpenCMISS resultsshow only the total stress components, which will be considered in the following steps.
4. Now assume that the material is incompressible, and write down analytical expressions for the total stresscomponents with respect to the reference coordinates: 𝑇 𝑓𝑓
𝑟𝑒𝑓 and 𝑇 𝑠𝑠𝑟𝑒𝑓 (these are shown as 𝑇 𝑓𝑓 and 𝑇 𝑠𝑠 in Eqn
38 of Nash and Hunter (2007), or Eqn 15 of Nash and Hunter (2000)).
5. Calculate the total stress components with respect to the reference coordinates: 𝑇 𝑓𝑓𝑟𝑒𝑓 and 𝑇 𝑠𝑠
𝑟𝑒𝑓 using the ex-pressions you wrote down in Step 4 above. This requires addition of a dilatational component of stress calledthe hydrostatic pressure, 𝑝, which is a scalar variable with a value that is provided in the simulation results.Check your total stress values against those in the simulation results.
Note:
• {𝐶𝑀𝑁} is the inverse of {𝐶𝑀𝑁}. (They are different tensors)
• It is straightforward to invert a diagonal tensor. Check that {𝐶𝑀𝑁}−1{𝐶𝑀𝑁} = 𝐼 .
6. Using this analysis, what can you infer about the material symmetry of Model 1? Explain your observation.
7. Now run Model 2, which is similar to Model 1 except that the material constants are set to:
𝑐1 = 0.0475 𝑘𝑃𝑎
𝑐𝑓𝑓 = 15.25 𝑐𝑠𝑠
= 6.8 𝑐𝑛𝑛 = 8.9
𝑐𝑓𝑠 = 6.95 𝑐𝑓𝑛
= 6.05 𝑐𝑛𝑠 = 4.93
Re-use your analytical expressions from Step 1 above, now with these new material constants, to calculatedistortional components of the second Piola-Kirchhoff stress tensor: 𝑇 𝑓𝑓_𝑑𝑖𝑠𝑡
𝑟𝑒𝑓 and 𝑇 𝑠𝑠_𝑑𝑖𝑠𝑡𝑟𝑒𝑓 with respect
to the reference axes.
8. Re-use your analytical expressions from Step 4 above to calculate, for Model 2, the total stress components:𝑇 𝑓𝑓𝑟𝑒𝑓 and 𝑇 𝑠𝑠
𝑟𝑒𝑓 (use the new hydrostatic pressure value, 𝑝, from the simulation results). Check your answersagainst the simulation results.
9. Explain the similarities and differences in the total second Piola-Kirchhoff stress components from Steps 5 and8. What can you infer about the mechanical responses (material symmetries) of the two models?
5.3.2 Stresses with respect to rotated material-fibre axes
10. Now run Model 5, which uses the same (anisotropic) material constants as in Step 7 above. In this simulation,the material-fibre axis is oriented at 𝜃 = 45 degrees with respect to the 𝑋1-axis (in the 𝑋1-𝑋2 plane).
5.3. Section 2: Analysing stresses during equi-biaxial deformation 23

soft-tissue-mechanics-labs Documentation, Release 3.0
11. Substitute the fibre strain components (𝐸𝑓𝑖𝑏) from the simulation results, and the material constants from Step7, into your expressions from Section 2 to determine the components of the total second Piola-Kirchhoff stresstensor with respect to the material-fibre coordinates, 𝑇 𝑓𝑖𝑏 (use the hydrostatic pressure, 𝑝, from the simulationresults).
12. Determine the second Piola-Kirchhoff stress components with respect to the reference coordinate axes (𝑇 𝑟𝑒𝑓 )via an appropriate tensor transformation (see Step 3 of Section 2 of Lab 2a). Check your answers against thesimulation results.
13. How do the stress components of 𝑇 𝑓𝑖𝑏 and 𝑇 𝑟𝑒𝑓 for this model compare to the components of 𝑇 𝑟𝑒𝑓 for theprevious model in Step 5 above? Explain the similarities and differences.
14. Now run Model 6, for which the material-fibre axis is oriented at 𝜃 = 90 degrees with respect to the 𝑋1-axis (inthe 𝑋1-𝑋2 plane). Repeat the analyses in Steps 11-12.
15. How do the stress components of 𝑇 𝑓𝑖𝑏 and 𝑇 𝑟𝑒𝑓 for this model compare to the components of 𝑇 𝑟𝑒𝑓 for theprevious model in Step 5 above? Explain the similarities and differences.
5.3.3 Extra discussion points for experts
If you have completed the exercises above, you may like to consider the following questions:
a. What do you notice about the stress tensors, 𝑇 𝑓𝑖𝑏 and 𝑇 𝑟𝑒𝑓 , from the above analyses for the isotropic (Model1) and anisotropic (Models 2,5,6) materials subject to equi-biaxial deformations? Explain this observation.
b. Model 1 considers equi-biaxial deformation, and there were similarities in some of the stress components. If,instead, a uniaxial stretch was applied along the 𝑋1 direction, predict what would happed to the components ofstress.
c. What would you expect if you compared the maximum principal stresses for each of the anisotropic cases(Models 2,5,6)? Justify your amswer.
Note: By completing this lab, you should be able to:
• derive expressions for the components of the second Piola-Kirchhoff stress tensor.
• evaluate components of the second Piola-Kirchhoff stress tensor with respect to spatial or material-fibre coordi-nates.
• infer the material symmetry of a material described by a specific constitutive equation and a particular set ofmaterial constants by analysing the stress components.
24 Chapter 5. Lab 3: Analysing stresses in anisotropic materials

CHAPTER 6
Indices and tables
• genindex
• modindex
• search
25