Slide 1: Title, name and Registration date Slide 2 ...
29
Transcript of Slide 1: Title, name and Registration date Slide 2 ...


Main Supervisor : Dr NoorHamizah binti Mohamed Nasir
:
FYP Project : TAN WEE LONG
Electromyography (EMG) –Controlled Upper Limb Exoskeleton and Monitoring System for Stroke Rehabilitation


Rehabilitation
- Restoring and Regaining (physical strength and
sensory function) (National Institute of
Neurological Disorders and Stroke , NINDS),
(2017)
- Due to illness, disease or injury
- Stroke or spinal injury

One Degree of Separation: Paralysis and Spinal Cord Injury in the United StatesPublished: April 21, 2009

In Malaysia, stroke was the top three leading cause s of death with the crude death rate ranging from 71.50 per 100,000 of population.
Ranking for ASEAN and the leading cause of death by stroke for 2017

3 million suffering from stroke every year

Brain Injury

In these days, the case of stroke is rising
steadily every year and it became a very
common disease which would lead to
disability.
Furthermore, the needs of physiotherapist
would increase as the increasing in
amount of patient will lead to the shortage
in physiotherapist.

To improve the quality of the
rehabilitation process, today’s technology
can be applied onto physiotherapy.
Equipment such as exoskeleton can be
implemented in therapy activity to improve
the rehabilitation process.

To develop a system that can
monitor the electrical activity of
muscle.
DEVELOPMENT
To control upper limb
exoskeleton using EMG signal
CONTROL
To design and develop an upper
limb exoskeleton.
DESIGN

SCOPE OF STUDY
- The device is suitable for upper limb only.- Test the electrical activity of muscle on upper limb of normal person and a stroke patient using surface electrode.- Raspberry Pi 3 Model + is used as the microcontroller in the project.- Python programming language is used to control the actuators and collect data.- Myoware EMG muscle sensor is used to observe the electrical activity of muscle.

Block diagram of the system
METHODOLOGY
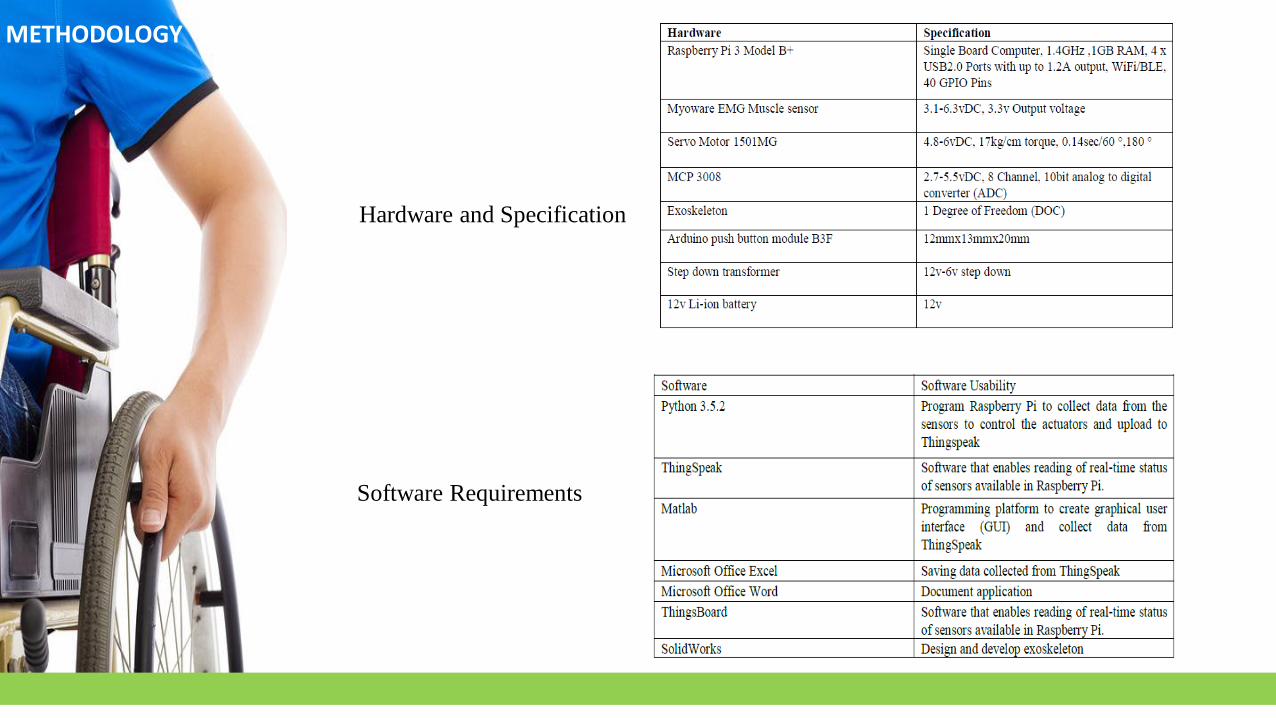
Hardware and Specification
Software Requirements
METHODOLOGY

Design for the user interface for the first window
Design for user interface when “Monitoring”
button is pressed
Design for user interface when “EMG Muscle Practice”
button is pressed
Test Result for Monitoring SystemMETHODOLOGY
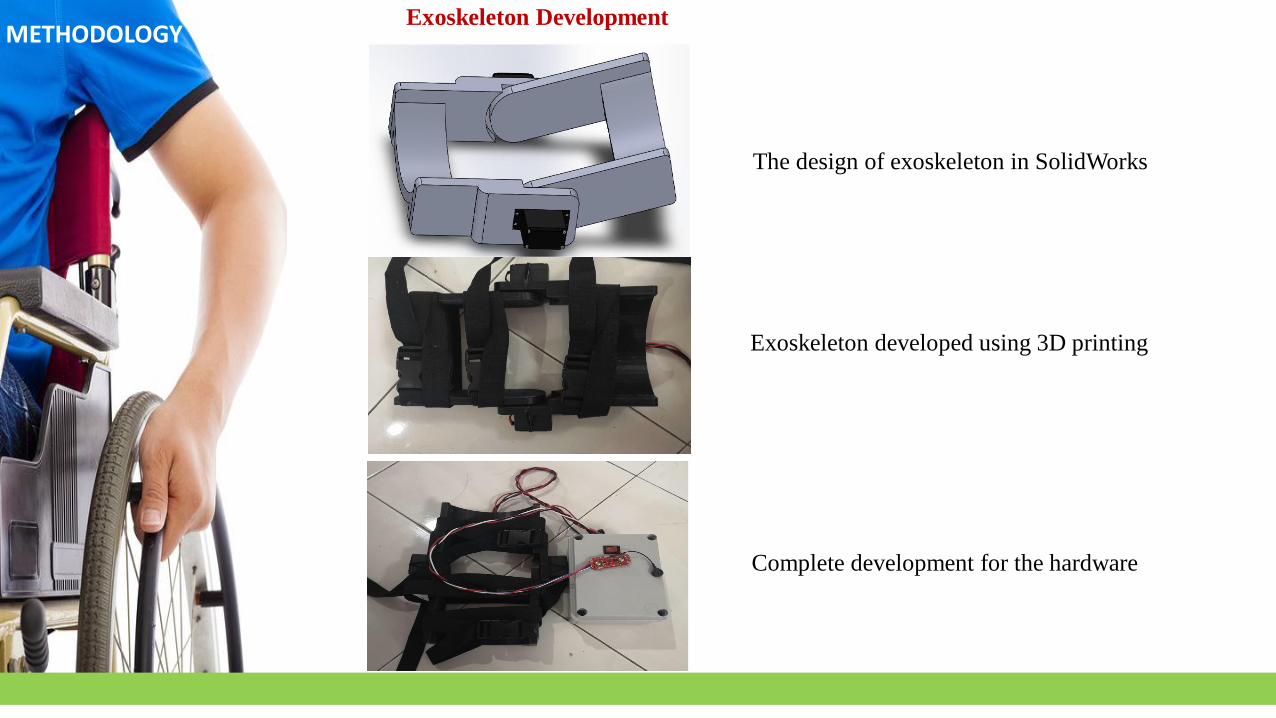
Exoskeleton Development
The design of exoskeleton in SolidWorks
Exoskeleton developed using 3D printing
Complete development for the hardware
METHODOLOGY

Experimental
Exoskeleton setup Testing on volunteer (stroke)
METHODOLOGY

Result and Discussion
Test result of monitoring system with stroke patient
Test result of monitoring system with normal person
The highest EMG signal obtain is 1.829v and the
average EMG signal obtained is 0.284v.
The highest EMG signal obtain is 3.119v and the
average EMG signal obtained is 1.152v
Test Result for Monitoring System
Result and DiscussionAnalyze the Test Result for Monitoring System
From the result, the highest EMG signal peak while conducting EMG muscle practice
activity for stroke patient is 1.829v. This voltage peak was showed when the exoskeleton is
holding on the lifting position. Also, the average EMG signal obtain throughout the process
of EMG muscle practice for stroke patient is only 0.284v. From the result of testing the
monitoring system with normal person while conducting EMG muscle practice activity, the
highest EMG signal peak obtained is 3.123v. This voltage peak was obtained when the
exoskeleton is holding on lifting position as well. The average EMG signal is 1.152v. Since
the voltage peaks only appears when the exoskeleton is holding on the lifting position, it is
said to be there is the contraction of muscle fibers occurs.
By comparing the voltage signal value between a stroke patient and a normal person, the
EMG signal obtain from the stroke patient is much lesser than a normal person. The
average EMG signal of the stroke patient and the normal person while conducting the test is
different by 0.868v. Significant different showed when comparing the EMG signal of a
normal person to a stroke person. The reason that the EMG signal of a stroke person is so
small is because the signal obtain from stroke patient is weaker than a normal person.
Stroke cause damage to the brain and affect the signal. Therefore, stroke patient will have a
smaller EMG signal compare to a normal person.

Result and Discussion
The performance of Electromyography (EMG)-Controlled Upper Limb Exoskeleton
The EMG-controlled upper limb exoskeleton
will only perform action when the user is trying
to lift their arm by their own
The EMG signal value required needed to be
tuned for every individual since the maximum
EMG signal for every individual can be
different.
Therefore, the exoskeleton will only perform
lifting action when the user is really putting
effort on it.

Result and Discussion The Performance of Monitoring System
Data presented in ThingsBoard
Data uploaded to ThingSpeak
Data saved in local memory
The monitoring system is used to monitor the muscle electrical activity.
Raspberry Pi is used to perform the monitoring task by reading the EMG
signal form the muscle sensor. The data collected is then saved in Raspberry
Pi local memory and upload it to ThingSpeak

Result and Discussion The Performance of Monitoring System (cont.)
ThingSpeak data display on Matlab App Python displaying the time needed for
collecting and sending data to ThingSpeak
Time take for collecting signal from muscle sensor to send data
onto ThingSpeak took about 1.48second.
Which mean the monitoring system is collecting a data every
1.48second

The first objective was to develop a system that can monitor theelectrical activity of muscle. This project had been developed withthe use of Myoware EMG muscle sensor, Raspberry Pi andMatlab.
Myoware EMG muscle sensor is used to detect the EMG signal inthe unit of volt. Raspberry Pi is used as minicomputer for dataacquisition and Matlab is used as a platform to create a systemthat able to collect the data from ThingSpeak.

The second objective was to control the upper limb exoskeletonusing EMG signal. This objective had also been achieved usingMyoware EMG muscle sensor to collect EMG signal, servo motoras the actuators to perform movement for the exoskeleton andRaspberry Pi as the microcontroller.
For the exoskeleton to perform movement, EMG signal valuemust exceed certain voltage by 3. When the exoskeleton is onlifting position, it will hold on the position for 3 seconds then goback to its origin position. The EMG signal value required neededto be tuned for every individual since the maximum EMG signalfor every individual can be different. Therefore, the exoskeletonwill only perform lifting action when the user is really puttingeffort on it.

The third objective, which is final objectives, was to design anupper limb exoskeleton had also been achieved. A one Degree ofFreedom (DOF) upper limb exoskeleton was successfully designusing SolidWorks. The exoskeleton is design with the servo motor(1501MG) on the sides. The exoskeleton prototype is thendeveloped using 3D printer with ABS as the printing material.

Further improvements that should be carried out to improve
the performance, ability and efficiency of this project.
(i) The speed of servo motor should be slower so it would have the
probability to damage the motor and cause injury.;
(ii) Signal analysis can be made on the signal obtain by the Myoware EMG
muscle sensor so that external factor will not affect signal acquisition. ;
(iii) Improvement on the IoT can be made so that it can collect and display
data every second. ;
(iv) The exoskeleton can improve in term of degree of freedom (DOF) to
improve the motion capability of the exoskeleton.

This research was supported by the -Office for Research Management Centre (RMC) -Universiti Tun Hussein Onn Malaysia under grant H273. -Advanced Mechatronic Research (AdMire) Group.
T.W.Long1, N.H.M.Nasir1, B.S.K.K.Ibrahim3, M.K.I.Ahmad4,S.K.Narudin1
1Department of Robotics and Mechatronics, Faculty of Electrical and Electronic Engineering,
Universiti Tun Hussein Onn Malaysia, Parit Raja, Batu Pahat 86400 Johor, Malaysia
[email protected] [email protected]
[email protected]@siswa.uthm.edu.my
2School of Mechanical, Aerospace and Automotive Engineering, Faculty of Engineering, Environment & Computing, Coventry University, Coventry,
United [email protected]

THANK YOUEMAIL: [email protected]
UTHM: [email protected]
FACEBOOK: www.facebook.com/mohdkhairulikhwan
ACADEMIA: uthm.academia.edu/MohdKhairulIkhwanAhmad