
Slam is a State Estimation Problem. Predicted belief corrected belief.
54
Slam is a State Estimation Problem
-
Upload
hope-curtis -
Category
Documents
-
view
215 -
download
0
Transcript of Slam is a State Estimation Problem. Predicted belief corrected belief.

Slam is a State Estimation
Problem


Predicted belief
corrected belief

Bayes Filter Reminder

Gaussians

Standard deviation
Covariance matrix

Gaussians in one and two dimensionsOne standard deviation
two standard deviations

Gaussians in three dimensions
Multivariate probability

Properties of Gaussians for Univariate case
Linear system
Standard deviation on output of linear system
Mean on output of linear system
For two-dimensional system:

Properties of GaussiansProperties of Gaussians for Multivariate case
From previous slide

Properties of GaussiansImportant Property of all these methods

Discrete Kalman Filters

Kalman Filter background1. Kalman Filter is a Bayes Filter2. Kalman Filter uses Gaussians3. Estimator for the linear Gaussian case4. Optimal solution for linear models and Gaussian
distributions5. Developed in late 1950’s6. Most relevant Bayes filter variant in practice7. Applications in econcomics, weather forecasting, satellite
navigations, GPS, robotics, robot vision and many other8. Kalman filter is just few matrix operations such as
multiplication.

Discrete Kalman Filter

Components of a Kalman Filter

Example of Kalman Filter Updates in one dimension
Kalman Filter calculates a weighted mean value!

Kalman Filter Updates in 1D: PREDICTION
Single dimension
Matrices in multi-dimensions
Again generalization to many dimensions here

Kalman Filter Updates in 1D: CORRECTION
Variant single variable Generalization:
Variant of multiple variables
matrix

Kalman Filter Updates

Linear Gaussian Systems

Linear Gaussian Systems: Initialization
• Initial belief has a normal distribution:

Linear Gaussian Systems: Dynamics
Gaussian

Linear Gaussian Systems: DynamicsFrom previous slide
Linear, gaussian

Linear Gaussian Systems: Observations
R = correction
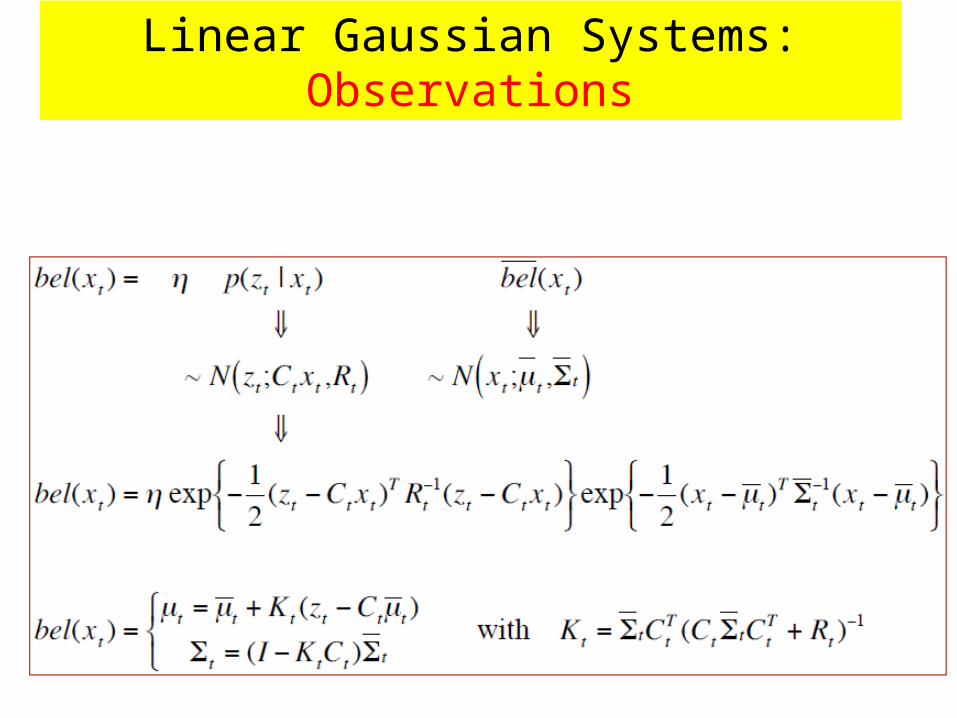
Linear Gaussian Systems: Observations

Properties: Marginalization and Conditioning
Notation for Gaussians
All are Gaussian

Kalman Filter assumes linearity
Zero-mean Gaussian Noise

Linear Motion Model
We want to calculate this probability variable

We want to calculate this probability variable
Theorem 1

We want to calculate this probability variable

We want to calculate this probability variable
Theorem 2

Everything stays Gaussian: the belief is Gaussian!
• Proofs of these theorems and properties are not trivial and can be found in the book by ‘three Germans” called Probabilistic Robotics.
Theorem 3

Kalman Filter
Algorithm

The Kalman Filter Assumptions are:1. Gaussian distributions2. Gaussian noise3. Linear motion4. Linear observation model
Discuss later

Calculates multi-dimensional mean and covariance matrix
Prediction phase
Correction phase
R for motion
Q for measurement
Prediction of multi-dimensional mean
Prediction of multi-dimensional covariance matrix
Calculates corrected multi-dimensional mean and covariance matrix
Kalman

Kalman Filter Algorithm
Different notation to previous slide
Measurement noise

Kalman Filter Algorithm: navigation using odometry and measurement to landmark
Predicted and corrected position of the ship

The Prediction-Correction-Cycle
The phase of Prediction

The Prediction-Correction-Cycle
The phase of Correction

The Prediction-Correction-Cycle

The general Optimal State
EstimationProblem

Diagram of general State Estimation
123
2 or 3 !
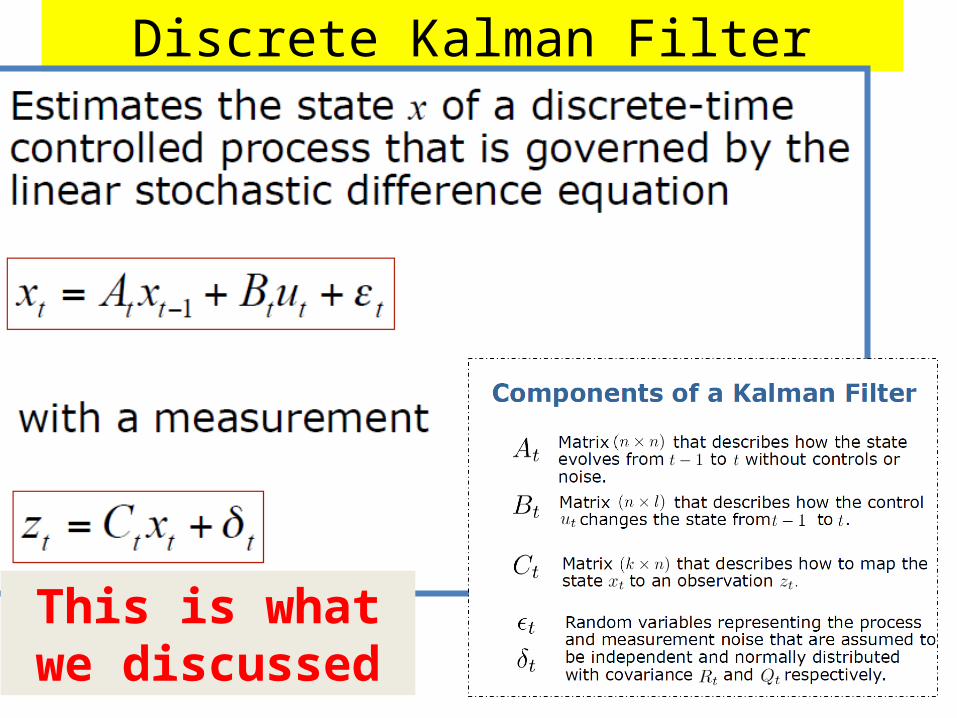
Discrete Kalman Filter
This is what we discussed

Linear-Optimal State Estimation
Compare with this
Change with timederivative

Linear-Optimal State Estimation (Kalman-Bucy Filter)
Similar to before
Kalman

Estimation Gain for the Kalman-Bucy Filter
• Same equations as those that define control gain, except– solution matrix, P, propagated forward in time– Matrices and matrix sequences are different


Second-Order Example of Kalman-Bucy Filter

Second-Order Example of Kalman-Bucy Filter

Kalman-Bucy Filter with Two Measurements
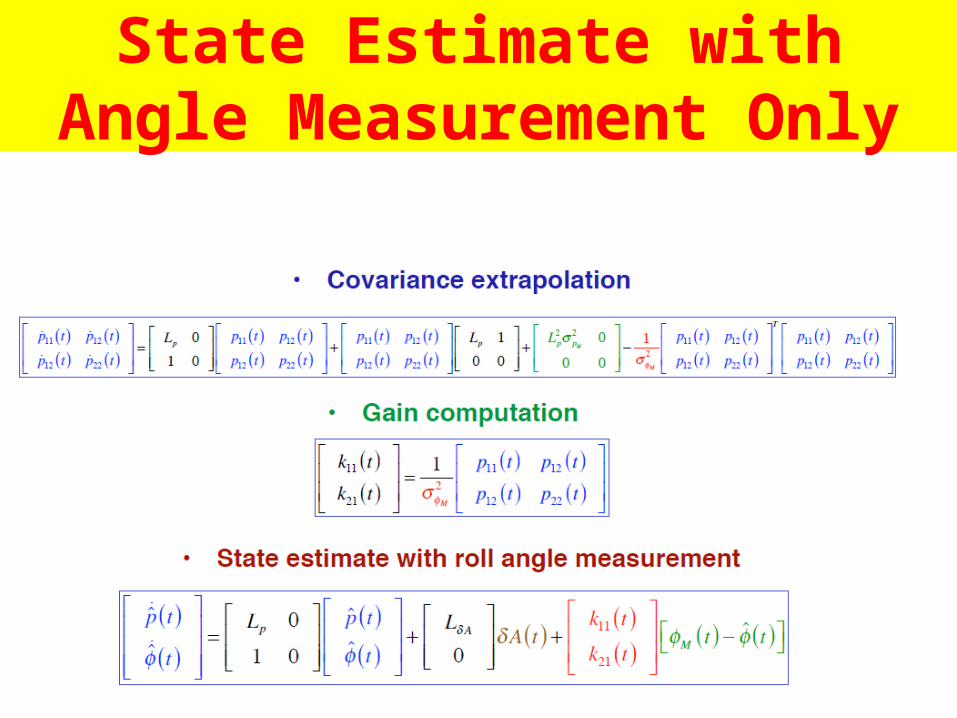
State Estimate with Angle Measurement Only

Kalman Filter Summary

Non-Linear Dynamic Systems

Sources
• Wolfram Burgard• Cyrill Stachniss,• Maren Bennewitz• Kal Arras


















