QR 38 Signaling I, 4/17/07 I. Signaling and screening II. Pooling and separating equilibria

Published online 24 October 2002
Separating equilibria in continuous signalling games
Carl T. Bergstrom1*, Szabolcs Szamado2 and Michael Lachmann3†1Department of Zoology, University of Washington, Seattle, WA 98115, USA
2Department of Plant Taxonomy and Ecology, Eotvos Lorand University, Budapest H-1518, Hungary3Santa Fe Institute, Santa Fe, NM 87501, USA
Much of the literature on costly signalling theory concentrates on separating equilibria of continuoussignalling games. At such equilibria, every signaller sends a distinct signal, and signal receivers are ableto exactly infer the signaller’s condition from the signal sent. In this paper, we introduce a vector-� eldsolution method that simpli� es the process of solving for separating equilibria. Using this approach, weshow that continuous signalling games can have low-cost separating equilibria despite con� icting interestsbetween signaller and receiver. We � nd that contrary to prior arguments, honesty does not require wastefulsignals. Finally, we examine signalling games in which different signallers have different minimal-costsignals, and provide a mathematical justi� cation for the argument that even non-signalling traits will beexaggerated beyond their phenotypic optimum when they are used by other individuals to judge conditionor quality.
Keywords: costly signalling; honest signalling; handicap principle; separating equilibrium; indexes;vector � eld
1. INTRODUCTION
Game theoretic models are commonly used to study thestrategic aspects of communication, including how andwhy signals evolve. In a typical model, a signaller, who hasprivate information about the state of the world, sends asignal to a receiver, who selects a response to the signal.Communication occurs when the signaller sends informa-tive signals that in� uence the receiver’s choice of response.This communication will be stable when the signaller andreceiver pursue strategies (rules for choosing signal andresponse, respectively) that together comprise a signallingequilibrium: a pair of signaller and receiver strategies suchthat neither party gains from a unilateral change in strat-egy (Bergstrom & Lachmann 1998).
In an extremely in� uential paper, Grafen (1990) formu-lated a model in which males signal quality to females,and showed that under certain conditions, costly signalsfacilitate honesty. Grafen’s analysis, based on a continu-ous signalling game with a continuum of possible signallerstates and signals, identi� ed a stable separating equilibriumin which every difference in signaller state is re� ected bya difference in signal. At this equilibrium, the signalreceiver can exactly infer the signaller’s quality from thesignal sent. Pooling equilibria, in which signallers in differentstates share common signals, may also exist (Bergstrom &Lachmann 1998; Lachmann & Bergstrom 1998).
In this paper we focus on separating equilibria, andattempt to address the following questions as generally as
* Author for correspondence ([email protected]).† Present address: Max Planck Institute for Mathematics in the Sciences,Leipzig D-04103, Germany.
One contribution of 12 to a Theme Issue ‘Information and adaptivebehaviour’.
Phil. Trans. R. Soc. Lond. B (2002) 357, 1595–1606 1595 Ó 2002 The Royal SocietyDOI 10.1098/rstb.2002.1068
possible. What are the basic common properties charac-terizing separating equilibria? When will separating equili-bria exist? How many separating equilibria will exist in agiven game? Why might there be no separating equilibriafor a given game? How costly do separating equilibriumsignals have to be? What predictions for empirical studiescan be made from theoretical models of separating equili-bria?
In § 2 we present initial de� nitions and describe theconditions for the existence of separating signalling equili-bria. In § 3, we present a simple method for � nding theseparating equilibria of signalling games as integral curvesof a vector � eld. We also show that this approach providesa useful intuitive picture of various signalling games. In§ 4 we show that many signalling equilibria are possible ifone varies the cost function, and that some of these havevery low signal costs at equilibrium. For these cost func-tions, honest signalling need not be wasteful even whensignaller and receiver interests differ substantially. In § 5we use the results of the earlier sections to present a math-ematical proof of an idea proposed by Lotem et al. (1999):when non-signalling characters are used as cues byobservers, the individuals exhibiting these characters willbe selected to express levels other than the phenotypicoptimum.
2. CONDITIONS FOR SIGNALLING EQUILIBRIA
(a) De� nitionsAppendix A contains a table of all variables and their
de� nitions. We begin by de� ning the signalling game Gthat we will study in this paper. The game G features twoplayers, a signaller and a receiver of the signals. The sig-naller has some quality q P [qmin, qmax] known only to her-self. She sends a signal s to the responder, eliciting a

1596 C. T. Bergstrom and others Signalling equilibria
response r P [rmin, rmax]. The signaller receives a pay-offof H(q,r) 2 C(q,s), where H can be thought of as the valueof the response and C as the display cost of the signal s.The receiver gets a pay-off G(q, r) from providing responser to a signaller of quality q. Each signaller will have a signalthat elicits the minimal response rmin.
Let s = S(q) and r = R(s) be signaller and receiver stra-tegies which specify what signal to send given one’s qualityand what response to provide given the signal received,respectively. The pair (S, R) is said to be a signalling equi-librium if neither signaller nor receiver can bene� t or breakeven from a unilateral change in strategy. It will be a separ-ating equilibrium if furthermore the signaller strategy S isone-to-one.
Denote a strategy of the receiver given that the state qof the signaller is known to her by Rq(q). The receiver’soptimum response is then given by the curveR¤
q(q) = argr max[G(q,r)] (the r for which the maximum isachieved). Hence, if the signal receiver knows the truequality q of the signaller, she will optimally choose aresponse1 R ¤
q(q).
(b) Properties of separating equilibriaWhat are the properties of these separating equilibria?
We begin with two lemmas.
Lemma 2.1. At any separating equilibrium (S,R) in thegame G, a signaller of quality q will receive the responseR¤
q(q).
In other words, the receiver will always provide exactlythe response that she would if there was no signallinginteraction but instead she started with perfect infor-mation. The proof is simple: by the de� nition of separat-ing equilibrium, the equilibrium signalling strategy S :q ! s is one-to-one and thus has an inverse S21: s ! q.At equilibrium the receiver must select a response r thatmaximizes her own net pay-off G(q,r). By de� nition thisresponse is given by r = R ¤
q(q). Having received the signalthe receiver can attain this response level by pickingR(s) = R ¤
q(S21(s)). As all separating equilibria will becharacterized by this response level, we call the curver = R¤
q(q) the equilibrium path. Notice that this lemma willnot hold for pooling equilibria—in those the receiver willnot have perfect information about the signaller’s state.
Once we examine a strategy pair (S, R), we can alsode� ne a cost function Cr(q, r) that says what cost a signal-ler has to pay to send a signal that would elicit theresponse r. This cost function is de� ned asCr(q,r) = C(q,R21(r)). Notice that while the cost functionC(q, s) does not change as we move from strategy to strat-egy, the cost function Cr(q,r) does. Noldeke & Samuelson(1999) point out an enlightening corollary.
Corollary 2.1. At any separating equilibrium (S,R), the sig-nal cost function Cr serves to bring the optimization problemsof signaller and responder into accord.
More speci� cally, at any separating equilibrium (S,R),the following equality holds for all q:
argrmax[H(q,r) 2 Cr(q,r)] = argrmax[G(q,r)].
Phil. Trans. R. Soc. Lond. B (2002)
The logic underlying this result is as follows. At anyseparating equilibrium the signaller can essentially ‘pick’her desired response and send the signal necessary to getit. None the less, lemma 2.1 tells us that at any separatingequilibrium, the signal receiver always provides exactly theresponse that maximizes her � tness, R¤
q(q) (assuming thatthe signal cost is independent of the response). Therefore,the optimal choice for the signaller must be to ‘ask for’precisely the response that the responder would want toprovide.
Next we can derive a set of conditions for the slope ofsignal cost on separating equilibria.
Lemma 2.2. At any separating equilibrium in the game G,( ¶ H(q,r))/( ¶ r) = (¶ Cr(q,r))/( ¶ r) along the equilibrium path.
The proof of this lemma, and an interesting corollary,are provided in Appendix B.
Lemma 2.2 and corollary 2.1 tell us something interest-ing about a signalling equilibrium: even though Cr changesas we move from strategy to strategy, every time these stra-tegies are a signalling equilibrium, Cr will have very dis-tinct properties: it will align the maximum of H 2 Cr withthat of G, and its slope will be equal to the slope of H.
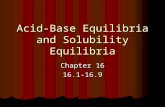
Example 2.1. Throughout this paper, we will examine anexample loosely based on the original model of Grafen (1990).A male bird of quality q, where q is drawn from some distri-bution with a range [0,1), signals his quality to a female, usinga signal of intensity s. The display cost, C, of producing thissignal depends on both the signaller’s quality and the signal’sintensity: C(q,s) = s(1 2 q). Upon observing his signal, thefemale selects a response r. Her pay-off is then given by thefunction G(q,r) = exp[2(q 2 r)2]; the closer in value is herresponse r to his quality q, the higher is her pay-off (this func-tion was arbitrarily chosen as a function that has its maximaalong the diagonal). Thus the receiver’s optimal response isgiven by the function R¤
q(q) = q. The signaller receives a bene� tthat increases as the intensity r of the receiver’s responseincreases: H(q,r) = r. We assume that the cost necessary to elicitthe least-desirable response rmin = 0 is zero for all signallers q.
In � gure 1a, we show the signaller’s bene� t functionH(q,r), along with the signaller’s desired response (dashedline) and the receiver’s desired response (solid line). Bycorollary 2.1, at a separating equilibrium, the signal costmust serve to bring these two different paths into accord.In � gure 1b, we show the function C(q, s) giving signalcost as a function of signaller quality q and signal intensitys. These two surfaces—the bene� t surface H and the costsurface C—can be seen as de� ning the signalling game.Our task is then to determine optimum signaller andreceiver strategies S(q) and R(s), and from these to com-pute the cost C(q,r) of eliciting a given response and thenet � tness consequences H(q,r) 2 Cr(q,r) to the signaller.
For this particular example, we can � nd the separatingequilibrium as follows. By the de� nition of separatingequilibrium, for every signaller q9, signaller’s choice of sig-nal S(q9) maximizes the signaller’s � tness. A necessarycondition is that for all q9 in [0,1)
dH(q9,R(s9))ds
2dC(q9,s9)
ds |s9 = S(q9)
= 0.

Signalling equilibria C. T. Bergstrom and others 1597
0.75
0.75
0.75
0.5
0.5
0.5
r
q
0.25
0.25
0.25
0
0
0
1
1
1 1.5
0.75
1.5
1
0.5
1
s
q
0.5
0.25
0.5
0
0
0
2
1
2a)
0.75
0.75
0.75
cost
0.5
0.5
0.5
r
q
0.25
0.25
0.25
0
0
0
1
1
1c)
0.6
0.75
pay-off
costbenefit
0.4
0.5
0.5
r
q
0.2
0.25
0
0
0
1
1
0.8d)
b)
Figure 1. Bene� t, cost and net � tness functions for example 2.1. The separating equilibrium is represented by the dark curvesacross the surfaces. (a) Bene� t function H(q,r): dashed line, signaller’s desired response; solid line, receiver’s desired response;(b) cost C(q,s) as a function of quality and signal sent; (c) cost Cr(q,r) as a function of quality and response elicited; (d )signaller’s net � tness H(q,r)—Cr(q,r).
By lemma 2.1, at this equilibrium the signaller willreceive the response that optimizes the receiver’s � tness,i.e. R(S(q9)) = q9. Therefore we have
FdH(q9,q9)dr
dR(s9)ds
2dC(q9,s9)
ds G|s9 = S(q9)
= 0.
By the inverse rule for derivatives,
dR(s9)ds |
s9 = S(q9)
= 1YdS(q9)dq |
q = q9
.
As (dH/dr) = 1 everywhere, we have simply
dS(q9)dq |
q = q9
= 1YdC(q9,s9)ds |
s9 = T(q9)
.
It follows that the signaller’s strategy S is the solutionto the differential equation dS/dq = 1/(1 2 q), i.e.S(q) = log[1/(1 2 q)] 1 c. Substituting our initial conditionC(q0,s0) = 0, where s0 = 0 is the signal necessary to elicit
Phil. Trans. R. Soc. Lond. B (2002)
response rmin, we � nd that c = 0. Receivers will thenrespond to a signal s with a response R(s) = S21(s) = 1 2e2s. This gives us a candidate solution; we still have tocheck that it truly is an equilibrium, i.e. that no signallercan bene� t from sending an alternate signal. In § 3 we willsee an easier method for arriving at the equilibrium.
At this equilibrium, the signallers send signals of inten-sity S(q) = 2 log[1 2 q] and receivers respond to a signals with a response R(s) = 1 2 e2s. The equilibrium cost toa signaller q of eliciting a response r is thenCr(q,r) = (q 2 1)log[1 2 r]. This cost function is shown in� gure 1c. Figure 1d shows the signaller’s net � tness H(q,r)2 Cr(q,r) as a function of quality and response induced.Figure 1d illustrates the consequence of lemma 2.1 andcorollary 2.1: a signaller of quality q—who seeks to max-imize H(q, r) 2 Cr(q, r) with respect to r—ends up choos-ing the point along receiver’s optimum path q = r. Thesignaller’s and the responder’s optimization problemswere brought into accord. Moreover, simple calculus veri-� es that lemma 2.2 is met, as everywhere along the

1598 C. T. Bergstrom and others Signalling equilibria
equilibrium path the signaller’s � tness is maximized withrespect to r, i.e. ¶ H(q,r)/ ¶ r = ¶ Cr(q,r)/ ¶ r.
3. A VECTOR-FIELD APPROACH TO SIGNALLINGGAMES
The task of � nding a separating equilibrium for a givensignalling game can be dif� cult, since for each candidatesignalling strategy S(q) we have to compute a correspond-ing response strategy R(s) to use in determining whetherthe strategy S(q) is actually stable. In this section, wepresent a method that simpli� es this process. We representequilibria as integral curves of a vector � eld, and in thisway we are able to � nd all the possible separating equilib-ria directly from the basic functions by which the game Gis de� ned: the signaller’s bene� t function H(q,r), signalcost function C(q,s), and the equilibrium path R ¤
q(q),which is easily derived from the receiver’s bene� t functionG(q,r) using lemma 2.1. Not only does this approach giveus an easy way to � nd the equilibrium strategies S and R,but it also provides a way of visualizing the form of varioussignalling games, which serves to highlight the differencesand similarities among them.
The following proposition provides the groundwork forthe vector-� eld representation. A proof is provided inAppendix C.
Proposition 3.1. De� ne the vector � eld V as2
V(s9,q9) = Sdds
C(q9,s)|s = s9
,ddq
H(q9,R¤q(q))|
q = q9
D.If a separating equilibrium exists for the game G with S(q0) =s0, the integral curve of V through (q0,s0) will be an equilibriumsignalling strategy S(q), provided that everywhere along thisintegral curve, the following inequality is satis� ed:
ddq
ddp
H(q,R¤q(p))|
p = q9,q = q9
.
S ¶ 2C¶ s ¶ q
(q,s)|q = q9,s = s9
DS ddq
H(q9,R¤q(p))|
q = q9
Ddds
C(q9,s)|s = s9
. (3.1)
The equilibrium receiver strategy is given byR(s) = R ¤
q(S21(s)), where S21(s) is the inverse of S.
Integral curves including points of the (q,s) plane atwhich condition 3.1 is not satis� ed will not be stable sepa-rating equilibria.
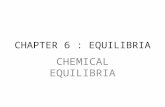
The game described in example 2.1 has a correspondingvector � eld of V = (1 2 q,1), shown in � gure 2. The crossderivative condition 3.1 holds everywhere. Assuming thata minimal signal of smin = 0 is suf� cient to induce a mini-mum response rmin, the equilibrium signalling strategyS(q) is simply the integral curve of V through the point(0,0). This curve is represented by the dark curve in � gure2. Notice that the cost of a signal s to a signaller of qualityq is simply the path integral of the x-axis component ofthe vector � eld ( ¶ C/ ¶ s) along the path given by the verticalline from y = 0 to y = s, as illustrated by the dashed linein � gure 2. This exempli� es that the signal cost depends
Phil. Trans. R. Soc. Lond. B (2002)
0 0.25 0.5 0.75 1 1.25 1.5
0
1
2
3
sign
al in
tens
ity,
s
signaller condition, q
dCds
dHdq
Figure 2. The vector � eld V(s,q) for the game treated inexample 2.1. Each vector has magnitude(d/dq) H(q9,R¤
q (q))|q = q9 direction and (d/ds) C(q9,s)|s = s9 in thehorizontal direction. The solid curve is the equilibriumsignalling strategy S(q).
on the properties of the vector � eld off the equilibriumpath. One can also see that we could have chosen manyother integral curves that lie off the point (0,0), forexample starting at a higher point (0,0.1). These wouldalso de� ne signalling equilibria, except that now no signal-ler signals the lowest cost signals, such as the signal s = 0.The stability of these equilibria depends on how thereceiver responds to signals that the signaller never sends.If the receiver ‘generalizes’ and responds to a signal thatis lower than 0.1 as she would to a signaller of quality 0,the equilibrium would not be stable. However, this doesnot have to be the case, and is part of the question ofequilibrium selection. For this paper we will not considerthe stability of a signalling strategy versus signals that nosignaller employs.
Figure 4a is a contour plot of the signaller’s total � tness,H(q, R(s)) 2 C(q,s), when the receivers use the equilib-rium response strategy R appropriate to the signallingstrategy S for which S(0) = 0. (This signalling strategycorresponds to the integral curve through (0,0), and isillustrated by the heavy yellow line.) Notice that the sig-nalling strategy always intersects the contour lines whenthey are vertical. This means that the signalling strategyS(q) extremizes (maximizes, in this case) the signaller’s� tness function for every signalling quality q.
The vector-� eld approach can also help us to under-stand why a separating equilibrium might fail to exist.Siller (1998) presents an example of a game similar to themodel of Grafen (1990), for which no separating equilib-rium exists. While the mathematics behind the model ofSiller (1998) may appear somewhat daunting, the vector-� eld approach clari� es the problem that Siller (1998)describes.
Example 3.1. As in example 2.1, a male bird of qualityq P [0, 1) signals his quality using a signal s and receives aresponse r. Bene� t functions are as before: the receiver gets apay-off G(q,r) = exp[2(q 2 r)2] and the signaller gets a pay-off H(q,r) = r, with the signal necessary to receive response rmin
= 0 costing zero for all signallers q. In this example, de� ne thesignal cost as follows:

Signalling equilibria C. T. Bergstrom and others 1599
0 0.5 1 1.5 2
signaller condition, q
sign
al in
tens
ity,
s
0
5
10
15
20
Figure 3. The vector � eld and integral curve through (0,0)for example 3.1.
C(q,s) = 2 2e 2 q 1 1
s 1 1.
This is an unusual signal cost function: the cost of any parti-cular signal increases with signaller quality, but the marginalcost of signalling decreases both with signaller quality and withsignal intensity. Consider signallers with qualities q on theinterval [0,2], and assume that the signaller of quality qmin
= 0 sends a signal of intensity smin = 0.
Figure 3 shows the vector � eld for this model. As isclear from the � gure, the signal intensity ‘blows up’ nearq = 1.5, as the vector � eld along the integral curve describ-ing the signal path approaches an in� nite slope. Indeed,as Siller (1998) points out, all signallers beyond some lim-iting point will send a signal of in� nite intensity. Themaximal integral curve through the point (0,0) does notafford an inverse on the domain [0,2], and so no separat-ing equilibrium exists. Siller points out that this situationmay be reasonable when signal intensity measured by aratio such as that of pigmented surface area to non-pig-ment surface area.
4. MANY COST FUNCTIONS ALLOW STABLESIGNALLING
In § 1, we assumed that the cost function was speci� edas part of the game G. However, many different cost func-tions can allow honest signalling for particular bene� tfunctions H(q,r) and G(q,r). In this section, we will explorethe properties of the separating equilibria that correspondto different cost functions C. We will � nd that signal costsat these equilibria may be higher or lower than thosefound above.
Example 4.1. As before, a male bird of quality q P [0,1)signals his quality using a signal s and receives a response r.Bene� t functions are in example 2.1: the receiver gets a pay-off G(q,r) = exp[2(q 2 r)2] and the signaller gets a pay-offH(q,r) = r. The signal needed to elicit response rmin = 0 costszero for all signallers. In this example, however, we consider arange of different signal cost functions, represented by the func-tion C(q, s) = sa(1 2 q)a, where a is a strictly positive constant.
Figure 5 shows the signal cost for three different cost
Phil. Trans. R. Soc. Lond. B (2002)
0 0.2 0.4 0.6 0.8 1.0
0
1.0
2.0
3.0
sign
al in
tens
ity,
s
0 0.2 0.4 0.6 0.8 1.0
sign
al in
tens
ity,
s
1.5
1.0
0.5
0
0 0.2 0.4 0.6 0.8 1.0
sign
al in
tens
ity,
s
1.5
1.0
0.5
0
signaller condition q
a)
b)
c)
Figure 4. Vector � elds, signalling equilibrium and contourplots of � tness or cost. (a–c) Signaller quality q versus signalintensity s. Arrows represent the vector � eld V. A signallingequilibrium strategy S(q) that passes through the point (0,0)is plotted in yellow, over a contour plot of the � tnessfunction H(q, R(s)) 2 C(q,s). (a) Example 2.1, V, S and total� tness; (b) example 5.1, V, S and total � tness; (c) example5.1, V, S and cost C; vector � eld and signalling strategyoverlaid over the cost C (q,s).
functions, corresponding to a = 1/4, a = 1, and a = 4.Figure 5a shows cost as a function of signaller quality andsignal intensity, � gure 5b shows cost as a function of sig-naller quality and response received. Each cost functionaffords a separating equilibrium; equilibrium signal cost atthis equilibrium is shown as a function of signaller qualityin � gure 5c. This equilibrium signalling strategy can befound as in example 2.1, and for a Þ 1 is given by

1600 C. T. Bergstrom and others Signalling equilibria
0 0.250.50.751q
00.5
a) b) c)
1
s
0
1
cost0.5
00.5
1
q
00.25
0.5 0.75 1
r
0
0.5
1
cost
0.2 0.4 0.6 0.8 1q
0.20.40.60.8
11.2
equi
libr
ium
cos
t
Figure 5. Signal costs for cost functions C(q,s) = sa(1 – q)a. Light grey, a = 14; medium grey, a = 1; dark grey, a = 4. Dark
curves show the equilibrium path for each cost function. (a) Cost of signalling, as a function of signaller’s quality and signalintensity. (b) Cost of signalling, as a function of signaller’s quality and response received given equilibrium behaviour by thereceiver. The upper cost surfaces have been partially cut away to reveal those beneath them. (c) Signal cost at equilibrium, asa function of signaller quality.
S(q) = S(1 2 q)1 2 a 2 1a 2 1 D1/a
.
The signalling costs at equilibrium for a Þ 1 are givenby
C(q,S(q)) =(1 2 q)a 2 (1 2 q)
1 2 a
(when a = 1, the equilibrium becomes that found inexample 2.1). Thus, the signal costs at equilibrium differdramatically for the three cost functions. Unless we knowthe exact shape of the cost function—which typically willdepend on the biology of the organism and the mechanicsof signalling—signalling theory will not offer precise pre-dictions about the necessary signal costs at equilibrium.
Indeed, we can even � nd a signal cost function C of thisform so that equilibrium signal costs are arbitrarily cheap.Calculus reveals that the equilibrium cost paid by a signal-ler of quality q will be less than d provided that a is suf-� ciently large.3 For example, a = 8 is suf� cient to ensurethat equilibrium signal costs are ,0.1 for all signallers.In this way, we can construct cost functions that allowarbitrarily cheap separating equilibria. Lachmann et al.(2001) used a similar approach (but a different functionalform) to derive analogous low-cost equilibria for the para-digmatic signalling games of Grafen (1990) and Godfray(1991). These models—which were designed to show thatcostly signalling is indeed feasible—should not be inter-preted as evidence that costly signalling is necessary, evenwhen signallers’ and receivers’ interests con� ict. Indeed,contrary to the principal claim of the handicap principle(Zahavi 1975, 1977), these results show that reliable sig-nalling does not require waste.
We can get an intuitive understanding of why differentcost functions allow different equilibrium costs, by exam-ining the form of the equilibrium conditions. Consider� gure 5b: lemma 2.2 speci� es the slope of the cost surfaceCr(q,r) in the ‘r direction’, everywhere along the equilib-rium path, but says nothing about the slope of the costsurface in the q direction. If the cost surface were � at inthe ‘q direction’, then there would be no � exibility in theshape of the cost function; absolute signal cost along theequilibrium path would be determined as well. But thesurface need not be � at in the q direction. Thus, as onemoves along the equilibrium path, marginal increases insignal cost from movement in the r direction can be offset
Phil. Trans. R. Soc. Lond. B (2002)
by marginal decreases in signal cost from movement inthe q direction. In fact, � gure 5c shows that equilibriumsignal cost decreases for high-quality signallers. This isbecause in this case the increase necessary for the equilib-rium to be stable in the s direction is more than offset bythe change of the cost in the q direction. Thus, we seethat cheap signalling is facilitated by the interactionbetween signal and quality in determining signal cost. Ifthere is no interaction—for example, if signal cost is inde-pendent of signaller quality q—cheap equilibria will notexist.
But should we really expect signal cost to interact withsignaller quality and the signal sent? In particular, is itrealistic to expect real signal cost functions to take formsthat will allow low-cost signalling? Perhaps unsurprisingly,this depends on the biology of the system in question. Insome circumstances, signal costs will probably not dependon signaller quality much at all. For begging baby birds,much of the signal cost may be associated with increasedpredation risk; given a particular level of begging intensity,this risk is unlikely to vary much with signaller condition.In other circumstances, signal costs may depend on signal-ler quality, but not in the right way to facilitate low-costseparating equilibria. None the less, certain scenarios mayprovide the proper forms of signalling costs. In particular,when signal costs arise through social punishment of dis-honest signallers, rather than through the production coststhemselves, honest signals can be free while even relativelysmall deceptions can provoke retaliation and substantialcosts. Lachmann et al. (2001) explore signal costs of thisform in further detail, with a particular focus on humanlanguage.
Empirical studies that measure the absolute costs ofequilibrium signals will usually not suf� ce to con� rm orreject costly signalling hypotheses. Measurements of netexpenditure on signals tell us little, because many differentcosts (or even zero cost) are possible at equilibrium. Fur-thermore, comparisons of equilibrium signal costs tell uslittle because these costs can increase or decrease with sig-naller quality (Getty 1998). If we cannot easily predictabsolute cost, what predictions can we make from signal-ling theory? To answer this, we seek common features ofthese equilibria. Lemma 2.2 tells us that for a given signal-ler quality q, the slope of cost with respect to a responsethat is induced around equilibrium ( ¶ Cr(q,r))/ ¶ r is the

Signalling equilibria C. T. Bergstrom and others 1601
same regardless of which cost function we are looking at.Indeed, here (¶ Cr(q,r))/¶ r = (1 2 q)a/(1 2 r)a = 1 along theequilibrium path R ¤
q(q) = r for all positive values of a. Tophrase this another way, at equilibrium the marginal costsof signalling are the same regardless of the shape of thesignalling function. As the theory’s strong and unambigu-ous predictions involve the consequences of deviationsfrom equilibrium, empirical studies of honest signallingmay require signal magnitudes to be experimentally alt-ered. We are not the � rst to address the marginal–absolutecost distinction (Zahavi 1981; Nur & Hasson 1984;Michod & Hasson 1990; Hasson 1997; Getty 1998;Lachmann et al. 2001). Nevertheless, we mention it herebecause its importance is not easily understated.
5. WHEN SIGNALS HAVE INDEPENDENT MEANING
In almost all models of costly signalling, signal cost isassumed to increase monotonically with the intensity ofthe signal (the only exceptions are the discrete models inHurd 1995; Szamado 1999). Holding the response of thesignal receiver constant, any signaller—regardless of qual-ity—will optimize � tnesses by expressing the minimal sig-nal intensity.
In practice, however, some signals may be structured sothat different signallers have different minimal-cost signalintensities. Consider, for example, the ornamental tailsexhibited by many bird species. While these extended tailsundoubtedly play a signalling role, they may also in� uence� ight performance. If so, different quality signallers wouldhave different optimal tail lengths even if the tail had nosignalling function (Hurd 1995).
We can use the framework that we have developed thusfar to explore the properties of separating equilibria forsignals of this type. Let us move directly to an example.
Example 5.1. As in previous examples, a male bird of qual-ity q P [0,1) signals his quality using a signal s and receivesa response r. Bene� t functions are as always: the receiver getsa pay-off G(q,r) = e2(q 2 r)2 and the signaller gets a pay-offH(q,r) = r. Here, however, let us assume that a signaller ofquality q can most cheaply send a signal of intensity s = q; anydeviation imposes a � tness cost. In particular, we will de� neC(q,s) = (q 2 s)2. One might think that this sort of trait couldfacilitate honest cost-free signalling (of q), between individualswith con� icting interests, but this turns out not to be the case.
The optimal signaller and receiver strategies for thisgame are as follows, where W is the Lambert W function,
S(q) =12
(1 1 2q 1 W(2e21 2 2q))
R(s) = s 1e 2 2s 2 1
2. (5.1)
Figure 4b shows the net signaller pay-off (colouredcontours), equilibrium signaller strategy (yellow curve)and minimum-cost signalling strategy (white curve). Thecross-derivative condition in this case is valid everywhereabove the diagonal (s = q). The signalling equilibrium inthis case starts on the optimal signal line s = q at q = 0, butimmediately heads up in signal intensity (with an in� nitederivative) . This is because the slope of the cost functionat the optimum is zero—one needs to move very quickly
Phil. Trans. R. Soc. Lond. B (2002)
off this optimum to achieve any rise in cost. Figure 4cshows the same signalling strategy curves, this time over-laid on a contour plot of signal cost. From this � gure wecan see that the separating equilibrium does not follow the‘zero-cost’ valley of the cost surface (indicated by thewhite curve), but rather heads off it, with each signallerpaying a bit extra to signal.
Another way to think of this is that the marginal costof signalling along the zero-cost valley is zero everywhere.If the marginal gain is non-zero, then by lemma 2.2 theequilibrium cannot possibly lie along this ridge but ratherit must lie up off the valley � oor, where the marginal costis also non-zero.
How far above the valley � oor does the signal have tobe? In Appendix D it is shown that for H, which is onlya function of r and not of q, the following equation holds:
DC = DH 1 EE ¶ 2C¶ s ¶ q
, (5.2)
where DC is the cost difference for signaller q of the signalsent minus the optimal signal with DH being the � tnessdifference between the signaller q and the worst signaller.This means that ¶ 2C/ ¶ s ¶ q is the only factor that causes thecost of signalling to be not more than the bene� t of beinga higher quality signaller (notice that in our example thisintegral is negative). This result is shown by using Gauss’sTheorem on the vector � eld V.
So far, we have applied this mathematical model to ascenario in which different signallers have different mini-mal-cost signals. The same analysis can also be applied tonon-signalling traits. As Lotem et al. (1999) point out, weshould expect organisms to exaggerate non-signallingtraits once observers begin to use these traits (or associa-ted cues: Maynard Smith & Harper (1995)) as sources ofinformation. By interpreting the ‘signal intensity’ in ourmodel as the quantitative value of the non-signalling trait,the model provides a mathematical justi� cation for theargument of Lotem et al.: non-signalling traits will deviatefrom phenotypically optimal levels when observers usethese traits in assessing an individual’s quality. Lach-mann & Bergstrom (1999) derive an analogous result byalternative means.
6. CONCLUSIONS
By constructing a pair of ingenious game-theoreticalmodels, Grafen (1990) and Godfray (1991) demonstratedthat the basic idea underlying the handicap principle ofZahavi (1975) is at least feasible. Individuals with diver-gent interests can communicate honestly using costly sig-nals in an evolutionarily stable manner. Godfray (1991)and Grafen (1990) each presented speci� c examples ofcontinuous signalling games, and found that for theseexamples, costly signals allow a stable separating equilib-rium. Their results have often been interpreted as implicitsupport for the stronger claim made by Zahavi (1975):signal cost is necessary for honest communication wheninterests diverge.
In this paper, we have used a new vector-� eld solutionmethod to show that this interpretation is not valid. Wheninterests con� ict, costly signals allow—but are not neces-sarily essential for—honest signalling. Depending on the

1602 C. T. Bergstrom and others Signalling equilibria
form of the function mapping from signaller quality andsignal intensity to signal cost, an honest signalling systemcan exhibit any of a broad range of equilibrium signalcosts. Separating equilibria can even have extremely lowequilibrium signal costs.
These � ndings have important implications for empiri-cal testing of costly signalling theory. Studies that measurethe absolute costs of equilibrium signals will usually notsuf� ce to con� rm or reject costly signalling hypotheses,because many different costs are possible at equilibrium.Even the complete absence of signal cost at equilibrium (wheremost empirical measurements are taken) is insuf� cient to rejectthe hypothesis that signal cost plays a strategic role in facilitat-ing signal honesty. Furthermore, comparisons of equilib-rium signal costs tell us little because these costs canchange with signaller quality (Getty 1998). If we cannoteasily predict absolute cost, what is left for signallingtheory? What predictions can we make?
To answer these questions, we seek common featuresof signalling equilibria, and � nd that signalling theory’sstrong and unambiguous predictions involve not equilib-rium costs but rather the costs and consequences of devi-ations from equilibrium. For this reason, we suggest thatempirical studies of honest signalling may need to focuson the marginal costs of increased signal intensity, byexperimentally perturbing signal levels or otherwise
APPENDIX A: DEFINITION OF VARIABLES AND FUNCTIONS
variable de� nition
q P [qmin, qmax] signaller qualitys signal sentr P [rmin, rmax] receiver’s responseH(q,r) � tness value to signaller of quality q when receiving response rG(q,r) � tness value to receiver for providing response r to a signaller of
quality qC(q,s) � tness cost for signaller of quality q of sending signal sCr(q,x) � tness cost for signaller of quality q when sending a signal that would
elicit the response xR(s) receiver strategy specifying what response to provide signaller who sends
signal sRq(x) receiver strategy specifying what response to provide to a signaller of
quality xR ¤
q(x) receiver’s optimal response to a signaller of quality xS(q) signaller strategy specifying signal to send when the quality is qV(s,q) two-dimensional vector � eld representing partial derivatives of C and
H, and used for � nding signalling equilibria
APPENDIX B: PROOF OF LEMMA 2.2
(a) ProofBasically, we want to show that at signalling equilib-
rium, the receiver strategy automatically adjusts for themarginal cost of signalling along the equilibrium path, sothat only the signal cost—and not the actual signal inten-sity—affects the equilibrium response level. We can dothis as follows. Let (S,R) be a separating equilibrium,where R(s) is the receiver’s equilibrium response to a sig-
Phil. Trans. R. Soc. Lond. B (2002)
inducing individuals to alter the normal choices of signalintensity.
The authors thank S. Ptak, S. Dall and an anonymous reviewerfor many helpful comments. This work was supported by NIHgrant no. GM28016 to M. W. Feldman, and by the SantaFe Institute.
ENDNOTES1Note that without loss of generality, ‘quality’ q can be de� ned so thatthe function R ¤
q(q) is monotone. We will take this approach here, andfurther assume that R ¤
q(q) is strictly increasing, i.e., that the receiver caresabout quality differences across the entire range q P [qmin, qmax]. For analternative approach, see Proulx (2001).2Strictly speaking, the vector � eld V should be de� ned as
v(s9,q9) = 5 Sdds
C(q9,s)|s = s9
,ddq
H(q9,R¤q (q))|
q = q9
D ifdds
C(q9,s)|s = s9
> 0
S2dds
C(q9,s)|s = s9
, 2ddq
H(q9,R¤q (q))|
q = q9
D ifdds
C(q9,s)|s = s9
, 0
.
However, if we are willing to treat the integral curves as undirected, thesimpler formulation proves adequate.3Speci� cally, equilibrium cost to a signaller q will be less than d pro-vided that
a .1 2 q 1 d
d2
W((1/d)(1 2 q)(1 2 q 1 d)/dlog[1 2 q])log[1 2 q]
,
where W is the Lambert W-function.
nal s and S(q) is the signaller’s equilibrium signal whenin condition q. As (S,R) is an equilibrium, the signaller’sstrategy S will maximize his own net pay-off H(q,r)2C(q,s)for every q. Because all component functions are smoothand since at equilibrium C(q,s) = Cr(q,R(s)), this requiresthat for every q,
¶ [H(q,R(s)) 2 Cr(q,R(s))]¶ s |
s = S(q)
= 0. (B 1)
By lemma 2.1, if a signalling equilibrium (S,R) exists,

Signalling equilibria C. T. Bergstrom and others 1603
the equilibrium path will be given by R(S(q)) = R¤q(q).
Therefore, for every signalling condition q9,
¶ H(q9,r)¶ r |
r = R¤q(q9)
dRds |
s = S(q9)
dSdq |
q = q9
2¶ Cr(q,r)
¶ r |r = R¤
q(q9)
dRds |
s = S(q9)
dSdq |
q = q9
= 0. (B 2)
As we assumed that the receiver’s response R¤q(q) is
strictly increasing, it follows that for every q9, at separatingequilibrium (dR(s)/ds)(ds/dq) Þ 0. It then follows immedi-ately from equation (B 2) that for every q,
¶ H(q,r)¶ r |
r = R¤q(q)
=¶ Cr(q,r)
¶ r |r = R¤
q(q)
, (B 3)
where r = R ¤q(q) is the equilibrium path.
In several signalling models (e.g. Godfray 1991; John-stone & Grafen 1992), the cost of signalling C(q,s), isassumed to be independent of the signaller’s quality q. Inmodels of this type, the cost Cr(q,r) of eliciting a responser is also independent of q; the cost functions can thus bewritten as C(s) and Cr(r). The following corollary thenapplies.
Corollary B 1. When signal costs are independent of the sig-naller quality, the equilibrium signal cost Cr(r) of eliciting aresponse r does not depend on the relationship between signallevel and signal cost C(s), provided that a separating equilib-rium exists for the cost function C.
Suppose that from a game G, we generate a new gameG9 by altering the display cost function C(s) by a monotonetransformation u to generate a new display cost functionC9(s) = u(C(s)). If the game G had a separating equilib-rium, the game G9 will have a separating equilibrium (S9,R9) for which the signal costs Cr (r) of eliciting responsesr will be exactly as for the game G.
Several important models of costly begging signals(Godfray 1991; Johnstone & Grafen 1992; Godfray 1995)assume that signal cost is a monotone function of signalintensity, effectively equating signal intensity with signalcost. This corollary provides a justi� cation for thisassumption under certain circumstances, namely, for theseparating equilibria of games in which signal costs areindependent of signaller quality. In these models, therewill always be a one-to-one mapping between intensityand cost at separating equilibrium, and either scale can beused in analysing the system. However, Lachmann andBergstrom (1998) show that signal and cost cannot beequated when considering pooling equilibria. Getty(1998) provides an example in which signal costs dependon signaller quality and in which higher-intensity signalsactually cost less to their producers than lower-intensitysignals cost to their producers; here intensity and costclearly cannot be equated either.
APPENDIX C: PROOF OF PROPOSITION 3.1
Now to proposition 3.1. De� ne the vector � eld V as
V(s9,q9) = Sdds
C(q9,s)|s = s9
,ddq
H(q9,R¤q(q))|
q = q9
D.Phil. Trans. R. Soc. Lond. B (2002)
If a separating equilibrium exists for the game G withS(q0) = s0, the equilibrium signalling strategy S(q) will bethe maximal integral curve of V through (q0,s0). The equi-librium receiver strategy is given by R(s) = R ¤
q(S21(s))where S21(s) is the inverse of S.
To prove this, we � rst notice that since we are dealingwith a separating equilibrium, the integral curve of V canbe expressed as a function of q. We will now show that if(i) signallers of qualities at and around q0 signal T(q), (ii)the signalling function T(q) has all necessary derivatives,and (iii) this strategy is stable to small changes of the sig-naller strategy, then the direction of (q,S(q)) at q0 is equalto the direction of (q,T(q)) there.
As usual, we focus on the game G and assume that thesignal strategy T(q) together with the response strategyR(s) constitute a separating signalling equilibrium in aneighbourhood of q0. The signal costs C(q,s) are assumedto be non-negative for all q and s. We do not need to lookat an alternative response strategy R9, because by lemma2.1 the responder will use a response on the equilibriumpath R¤
q(q) such that R(T(q)) = R¤q(q).
For T to be an equilibrium, we require that the follow-ing expression hold for all q around q0 and for all s ÞT(q):
H(q,R(T(q))) 2 C(q,T(q)) > H(q,R(s)) 2 C(q,s). (C 1)
Therefore, if T is to be an equilibrium, it is necessarythat for all q,
dds
[H(q,R(s)) 2 C(q,s)]|s = T(q)
= 0, (C 2)
i.e. for all q,
dds
H(q,R(s))|s = T(q)
=dds
C(q,s)|s = T(q)
. (C 3)
Expanding the left-hand side, for all q
¶¶ r
H(q,r) |r = R(T(q))
dds
R(s) |s = T(q)
=dds
C(q,s) |s = S¤
(q)
. (C 4)
As we said before, at equilibrium, we know by lemma2.1 that the responder will use a response on the equilib-rium path R ¤
q(q) and therefore R(S(q)) = R ¤q(q):
S ¶¶ r
H(q,r) |r = R¤
q(q)
DSdds
R(s) |s = T(q)
D =dds
C(q,s) |s = T(q)
, (C 5)
i.e. for all q,
¶¶ r
H(q,r) |r = R¤
q (q)
=dds
C(q,s) |s = T(q)
Y ¶¶ s
R(s) |s = T(q)
. (C 6)
This equation is equivalent to expression (2) in Grafen(1990). At equilibrium, the responder’s response isR(s) = R ¤
q(T21(s)). Differentiating this expression withrespect to s, we see that
dds
R(s)|s = T(q)
=dds
R¤q(T21(s))|
s = T(q)
= S ddq
R ¤q(T21(s))|
s = T(q)
DSdds
T 21(s)|s = T(q)
D. (C 7)

1604 C. T. Bergstrom and others Signalling equilibria
The integrals above are each evaluated along the equi-librium signal path s = T(q), or equivalently q = T21(s).Applying this substitution
dds
R(s)|s = T(q)
= S ddq
R¤q(q)DSd
dsT 21(s)|
s = T(q)
D. (C 8)
By the inverse rule for derivatives
dds
R(s)|s = T(q)
=ddq
R¤q(q)Y d
dqT(q). (C 9)
Substituting this into equation (C 6), we get anexpression for the relationship between marginal costs andgains of signalling at equilibrium
S ddq
R¤q(q)DS ¶
¶ rH(q,r)|
r = Rq¤ (q)
D = S ddq
T(q)DS ¶¶ r
C(q,s)|s = T(q)
D.(C 10)
This says that at equilibrium, the product of the mar-ginal change of response with respect to a change in sig-naller’s condition, and the marginal gain from responsewith respect to a change in the response is equal to theproduct of the marginal change in signal with respect toa change in the signaller’s condition and the marginalchange in cost with respect to a change in the signal.
Alternatively, equation (C 10) can be written as
ddq
H(q,R¤q(q)) 2
¶¶ q
H(q,R¤q(q)) = S d
dqT(q)D Sd
dsC(q,s)|
s = T(q)
D.(C 11)
If we are interested in the decision problem facing aparticular signaller q9 (who cannot, after all, change q9),then we can evaluate H(q,r) and C(q,s) at q = q9 only, treat-ing these as functions of a single variable and writing themas H(q9)(r) and C(q9)(s), respectively.
For this particular signaller q9, equation (C 12)becomes simply
ddq
H(q9)(R¤q(q))|
q = q9
=ddq
C(q9)(T(q))|q = q9
. (C 12)
Qualitatively, this means that for a given signaller q9,the marginal � tness gain from the response induced bypretending to be a slightly better (or slightly worse) signal-ler q9 1 d is equal to the marginal � tness loss from the costof pretending to be this signaller. We have re-derived ourold result that at equilibrium, the marginal cost of exag-gerating one’s condition equals the marginal bene� t ofdoing so, only now we have included the signal s and thesignalling strategy T(q) explicitly. We can now solve forthis signal function directly. Carrying over the derivativein equation (C 12) with respect to s, and rearranging, we� nd that
ddq
T(q)|q = q9
=ddq
H(q9)(R¤q(q))|
q = q9
Ydds
C(q9)(s)|q = T(q9)
.
(C 13)
So, after much work, we arrived at the expression wewanted. This expression says that at q0 the direction of(q,T(q)) is equal to the direction of the curve S(q) de� nedby the vector � eld V.
Phil. Trans. R. Soc. Lond. B (2002)
dSdq
D q
D q
X W
ZY
q
s
Figure 6. Schematic representation of a point X on theequilibrium signalling path S(q), and three points in closeproximity.
(a) Cross derivative conditionWe want to ensure that the signalling equilibrium is
indeed a local maximum of the total � tness function.Figure 6 shows a local neighbourhood of point X, which
lies along a signalling path S(q). Point Z which is a smalldistance Dq away also lies on the signalling path. Points Yand W lie off the signalling path. For S to be a stablesignalling strategy, requirement (C 1) has to hold, andin particular
H(X) 2 C(X) > H(Y) 2 C(Y), (C 14)
H(Z) 2 C(Z) > H(W ) 2 C(W). (C 15)
From which we get
[H(Z) 2 H(W )] 2 [H(Y) 2 H(X)] >[C(Z) 2 C(W)] 2 [C(Y) 2 C(X)]. (C 16)
Expanding to the second order in Dq, we get
C(Y) 2 C(X) =¶ C¶ s
dSdq
Dq 112
¶ 2C¶ s2SdS
dqD2
(Dq)2 (C 17)
C(Z) 2 C(W) =¶ C¶ s
dSdq
Dq 112
¶ 2C¶ s2SdS
dqD2
(Dq)2
1¶ 2C¶ q ¶ s
dSdq
(Dq)2. (C 18)
We can do the same for H, noticing that a signaller ofquality q will get the response R¤
q (q 1 Dq) when signallingat point Y. From all this we get the condition
ddq
ddp
H(q,R ¤q(p)) >
¶ 2C¶ q¶ s
dSdq
(C 19)
and if we expand dS/dq we get � nally
ddq
ddp
H(q,R ¤q(p)) > S ¶ 2C
¶ q ¶ sDS ddp
H(q,R¤q(p))D Y¶ C
¶ s, (C 20)
rearranging a bit will give us
¶ C¶ s1
d
dqd
dpH(q,R ¤
q(p))¶ C¶ s
2 S ¶ 2C¶ q¶ sDS d
dpH(q,R ¤
q(p))DS¶ C
¶ s D2 2> 0 (C 21)
or

Signalling equilibria C. T. Bergstrom and others 1605
Figure 7. Schematic representation of the line a, b, g, andthe area A, that the integral is taken over. Shown is anintegral curve of the vector � eld V, with the optimum of thecost function on the diagonal, as in example 5.1 and � gure4c.
¶ C¶ s
ddq
dSdq
> 0. (C 22)
Notice that if this expression is not met at some point(q,s), then no stable separating equilibrium can assign sig-nal s to quality q.
One can interpret this expression as saying that in areasin which C increases with s, the derivative of S(q) has toincrease, i.e. the vector V should rotate to the left.
APPENDIX D: CALCULATING THE COSTDIFFERENCE FROM THE OPTIMUM
Figure 7 shows a schematic representation of the situ-ation described in example 5.1. The signalling strategyS(q) lies along an integral curve of the vector � eld V, andthe diagonal describes the optimum of the signal costfunction C. We want to calculate the cost difference forsignaller q0 between the cost on the signalling strategyC(q0, S(q0)) and the optimal cost (which in this case is onthe diagonal).
In � gure 7 we see the area A, which is enclosed by thecurves a, b and g. a is on the optimum of C, from 0 toq, b is vertical at q0, and g goes back along the signallingstrategy S. Gauss’s theorem tells us that
E¶ A
V · n ds = EEA
= · V da, (D 1)
where n is the normal to the curve along which the integralis taken.
So we have
E¶ ASdds
C(q9,s)|s = s9
,ddp
H(q9,R ¤q(p))|
p = q9
D·n dl =
EEAS ¶¶ q
,¶¶ sDSd
dsC(q9,s)|
s = s9
,ddp
H(q9,R ¤q(p))|
p = q9
Ddv. (D 2)
First let us look at the � rst integral. We have to integrateover a, b and g. Over g the curve follows the vector � eldexactly, therefore V · n = 0, so that part of the integral is
Phil. Trans. R. Soc. Lond. B (2002)
0. Over part b, the normal is (1,0), and therefore we onlyget an integral of dC/ds, which gives exactly DC, the costdifference for signaller q0. In the integral over a, dC/ds = 0,because we are talking about an optimum in C, so we onlyintegrate over dH/dp. As the integral curve points up alongthe diagonal, and the normal points down, we get(2DH), for
DH = Eq0
0
ddp
H(q9,R¤q(p))|p = q9 dq9 (D 3)
and when H is independent of q we getDH = H(q0,R¤
q(q0)) 2 H(0,R¤q(0)). Now let us turn to the
area integral, it is
EEA
¶ 2C¶ q ¶ s
1¶ 2H¶ q ¶ p
dv.
But the second term is 0 because dH/dp is constant acrosss. Finally we get
DC 2 DH = EEA
¶ 2C¶ q ¶ s
dsdq
or
DC = DH 1 EEA
¶ 2C¶ q ¶ s
dsdq,
which tells us how the cost relates to how desirable it isto be low-cost versus high-cost signallers.
REFERENCES
Bergstrom, C. T. & Lachmann, M. 1998 Signalling amongrelatives. III. Talk is cheap. Proc. Natl Acad. Sci. USA 95,5100–5105.
Getty, T. 1998 Reliable signalling need not be a handicap.Anim. Behav. 56, 253–255.
Godfray, H. C. J. 1991 Signalling of need by offspring to theirparents. Nature 352, 328–330.
Godfray, H. C. J. 1995 Signalling of need between parents andyoung: Parent–offspring con� ict and sibling rivalry. Am.Nat. 146, 1–24.
Grafen, A. 1990 Biological signals as handicaps. J. Theor. Biol.144, 517–546.
Hasson, O. 1997 Towards a general theory of biological sig-naling. J. Theor. Biol. 185, 139–156.
Hurd, P. L. 1995 Communication in discrete action-responsegames. J. Theor. Biol. 174, 217–222.
Johnstone, R. A. & Grafen, A. 1992 The continuous Sir PhilipSidney game: a simple model of biological signalling. J.Theor. Biol. 156, 215–234.
Lachmann, M. & Bergstrom, C. T. 1998 Signalling amongrelatives. II. Beyond the Tower of Babel. Theor. Pop. Biol.54, 146–160.
Lachmann, M. & Bergstrom, C. T. 1999 When honest signalsmust be costly. Santa Fe Institute Working Paper Series.
Lachmann, M., Szamado, S. & Bergstrom, C. T. 2001 Costand con� ict in animal signals and human language. Proc.Natl Acad. Sci. USA 98, 13 189–13 194.
Lotem, A., Wagner, R. H. & Balshine-Earn, S. 1999 The over-looked signaling component of nonsignaling behavior.Behav. Ecol. 10, 209–212.
Maynard Smith, J. & Harper, D. G. C. 1995 Animal signals:models and terminology. J. Theor. Biol. 177, 305–311.
Michod, R. E. & Hasson, O. 1990 On the evolution of reliableindicators of � tness. Am. Nat. 135, 788–808.

1606 C. T. Bergstrom and others Signalling equilibria
Noldeke, G. & Samuelson, L. 1999 How costly is the honestsignalling of need. J. Theor. Biol. 97, 527–539.
Nur, N. & Hasson, O. 1984 Phenotypic plasticity and thehandicap principle. J. Theor. Biol. 110, 275–297.
Proulx, S. R. 2001 Can behavioural constraints alter the stab-ility of signalling equilibria. Proc. R. Soc. Lond. B 268, 2307–2313. (DOI 10.1098/rspb.2001.1804.)
Siller, S. 1998 A note on errors in grafen’s strategic handicapmodels. J. Theor. Biol. 195, 413–417.
Szamado, S. 1999 The validity of the handicap principle in
Phil. Trans. R. Soc. Lond. B (2002)
discrete action-response games. J. Theor. Biol. 198, 593–602.
Zahavi, A. 1975 Mate selection—a selection for a handicap. J.Theor. Biol. 53, 205–214.
Zahavi, A. 1977 The cost of honesty (Further remarks on thehandicap principle). J. Theor. Biol. 67, 603–605.
Zahavi, A. 1981 Natural selection, sexual selection, and theselection of signals. In Evolution today, Proceedings of theSecond International Congress of Systematic and EvolutionaryBiology (ed. G. G. E. Scudder & J. L. Reveal), pp. 133–138.