
Section 5.1 Length and Dot Product in ℝ n. Let v = ‹v 1, v 2, v 3,..., v n › and w = ‹w 1, w...
66
Section 5.1 Length and Dot Product in ℝ n
-
Upload
peregrine-harris -
Category
Documents
-
view
214 -
download
0
Transcript of Section 5.1 Length and Dot Product in ℝ n. Let v = ‹v 1, v 2, v 3,..., v n › and w = ‹w 1, w...
Section 5.1Length and Dot Product in ℝn

Let v = ‹v1 , v2, v3, . . . , vn› and w = ‹w1, w2, w3, . . . , wn› be vectors in ℝn.
The dot product of v and w is
v ∙ w = __________________________________
Let v = ‹v1 , v2, v3, . . . , vn› and w = ‹w1, w2, w3, . . . , wn› be vectors in ℝn. The length of v (magnitude of v, norm of v) is
|| v || = ___________________________________
The length of v may also be computed using the formula
_________________________________________

Let v = ‹v1 , v2, v3, . . . , vn› and w = ‹w1, w2, w3, . . . , wn› be vectors in ℝn. The distance between v and w is
d(v, w) = _____________________________
Let v = ‹v1 , v2, v3, . . . , vn› and w = ‹w1, w2, w3, . . . , wn› be vectors in ℝn. The vectors v and w are orthogonal if
________________________________________

Let v = ‹v1 , v2, v3, . . . , vn› and w = ‹w1, w2, w3, . . . , wn› be vectors in ℝn. A unit vector in the direction of v is given by ___________________
A unit vector in the direction opposite of v is given by __________________

Let v = ‹v1 , v2, v3, . . . , vn› and w = ‹w1, w2, w3, . . . , wn› be vectors in ℝn. A vector in the direction of v with magnitude of c is given by ____________

Let v = ‹v1 , v2, v3, . . . , vn› and w = ‹w1, w2, w3, . . . , wn› be vectors in ℝn. The angle between vectors v and w is given by
____________________________________

Let v = ‹v1 , v2, v3, . . . , vn› and w = ‹w1, w2, w3, . . . , wn› be vectors in ℝn. || v + w ||2 = || v ||2 + || w ||2 if __________________________________

Ex. Let v = ‹4, 2›.
(a) Determine all vectors which are orthogonal to v.

Ex. Let v = ‹4, 2›.
(b) Find a vector parallel to v, but with a magnitude five times that of v.

Ex. Let v = ‹4, 2›.
(c) Find a vector in the opposite direction of v, but with a magnitude of five.
Properties of the dot product.
Let u, v, and w be vectors in ℝn and let c be a scalar.
1. u ∙ v = v ∙ u
2. u ∙ (v + w) = u ∙ v + u ∙ w
3. c (u ∙ v) = (cu) ∙ v = u ∙ (cv)
4. v ∙ v ≥ 0 and v ∙ v = 0 if and only if v = 0.

Section 5.2Inner Product Spaces

Let u, v, and w be vectors in a vector space V, and let c be a scalar. An inner product on V is a function that associates a real number < u, v > with each pair of vectors u and v and satisfies the following:
1. < u , v > = < v , u >
2. < u , v + w > = < u , v > + < u , w >
3. c< u , v > = <cu , v > = < u , cv >
4. < v , v > ≥ 0 and < v , v > = 0 if and only if v = 0.

Ex. An inner product on M2,2 :

Ex. An inner product on M2,2 :

Ex. An inner product on P2 .

Ex. An inner product on C[a,b]:

Def. Let v and w be vectors in an inner product space V. (a) The magnitude (norm) of v is || v || = ___________________________
(b) The distance between v and w is d(v, w) = _______________________
(c) The angle between v and w is found by the formula
________________________________________
(d) v and w are orthogonal (v ⊥ w) if _____________________________

Note:|| v + w ||2 = || v ||2 + || w ||2 if v and w are orthogonal.

Ex. Let f (x) = x , g(x) = x2 , and h(x) = x2 + 1 be functions in the inner product space C[0, 1].
(a) Compute || f ||

Ex. Let f (x) = x , g(x) = x2 , and h(x) = x2 + 1 be functions in the inner product space C[0, 1].
(b) Compute d( f, g) and d (g , h)

Ex. Let f (x) = x , g(x) = x2 , and h(x) = x2 + 1 be functions in the inner product space C[0, 1].
(c) Compare the distance between f and g with the distance between g and h.

Recall the projection vector of v onto w in ℝn:
projw v =
v ww
w w

The projection vector of v onto w in an inner product space V:

Ex. Let f (x) = x and g(x) = x2 be functions in the inner product space C[a, b]. Find the projection of f onto g.
Theorem:
Let v and w be two vectors in an inner product space V with w ≠ 0. Then
d(v, projw v) ≤ d(v, cw), with equality only when c = ,
,
v w
ww

Section 5.3Orthonormal Bases &
the Gram-Schmidt Process

Def. A set of vectors S is orthogonal if every pair of vectors in S is orthogonal. If in addition, every vector in S is a unit vector then S is orthonormal.

Examples:(i) In ℝ3 the set of basis vectors {i, j, k} form an orthonormal set.

Examples:(ii) In ℝ2 the set { (2, 2), (−3, 3) } is an orthogonal set of vectors but not orthonormal. We can turn it into an orthonormal set though.
Examples:(iii) Is the set {x+1, x−1, x2} an orthogonal set in P2? Is it an orthonormal set in P2 ? (UsethestandardinnerproductinP2)
Examples:(iv) Is the set {x+1, x−1, x2} an orthogonal set in C[0,1]? Is it an orthonormal set in C[0,1]? (UsethestandardinnerproductinC[0,1])

Ex. Create an orthonormal basis for ℝ3 that includes a vector in the direction of (3,0,3).

Ex. Verify that the set { 1, sin(x), cos(x), sin(2x), cos(2x), sin(3x), cos(3x), . . . . . , sin(nx), cos(nx) } is orthogonal in C[0, 2π] and then turn it into an orthonormal basis.

Ex. Verify that the set { 1, sin(x), cos(x), sin(2x), cos(2x), sin(3x), cos(3x), . . . . . , sin(nx), cos(nx) } is orthogonal in C[0, 2π] and then turn it into an orthonormal basis.

Ex. Verify that the set { 1, sin(x), cos(x), sin(2x), cos(2x), sin(3x), cos(3x), . . . . . , sin(nx), cos(nx) } is orthogonal in C[0, 2π] and then turn it into an orthonormal basis.
Ex. Verify that the set { 1, sin(x), cos(x), sin(2x), cos(2x), sin(3x), cos(3x), . . . . . , sin(nx), cos(nx) } is orthogonal in C[0, 2π] and then turn it into an orthonormal basis.

Ex. Verify that the set { 1, sin(x), cos(x), sin(2x), cos(2x), sin(3x), cos(3x), . . . . . , sin(nx), cos(nx) } is orthogonal in C[0, 2π] and then turn it into an orthonormal basis.

Def. The coordinate matrix of a vector w with respect to a basis B = { v1, v2, v3, . . . . , vn } is the column matrix [c1 ,c2 ,c3 , . . . . , cn]T , if w can be expressed as a linear combination of basis vectors with the coordinates c1 ,c2 ,c3 , . . . . , cn (eg if w = c1v1 +c2v2+c3v3 + . . . . + cn vn )

Ex. (a) Find the coordinate matrix of (2, 3, 5) in ℝ3 with respect to the standard basis {i, j, k} and the standard inner product.

Ex. (b) Find the coordinate matrix of (2, 3, 5) in ℝ3 with respect to the standard basis {k, j, i} and the standard inner product.
Ex. (c) Find the coordinate matrix of (2, 3, 5) in ℝ3 with respect to the basis { (1,1,1) , (1,2,3) , (−1,0,4) } and the standard inner product.
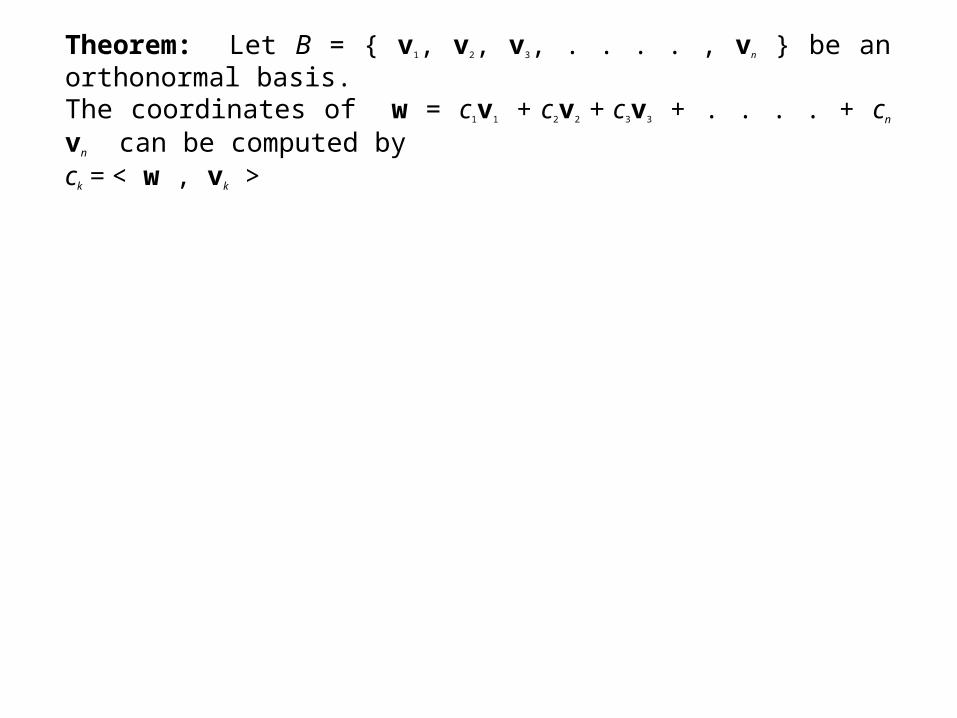
Theorem: Let B = { v1, v2, v3, . . . . , vn } be an orthonormal basis. The coordinates of w = c1v1 +c2v2+c3v3 + . . . . + cn vn can be computed by ck=< w , vk >

Ex. Give the coordinate matrix of (5, −5, 2) with respect to the orthonormal basis { (3⁄5, 4⁄5, 0), (−4⁄5, 3⁄5, 0), (0,0,1) }.

Gram-Schmidt Orthonormalization Process:
Let B = { v1, v2, v3, . . . . , vn } be a basis for an inner product space.
First form B′ = { w1, w2, w3, . . . . , wn } where the wk are given by

Gram-Schmidt Orthonormalization Process:
Let B = { v1, v2, v3, . . . . , vn } be a basis for an inner product space.
First form B′ = { w1, w2, w3, . . . . , wn } where the wk are given by
w1 = v1
2 12 2 1
1 1
,
,
v ww v w
w w
3 1 3 23 3 1 2
1 1 2 2
, ,
, ,
v w v ww v w w
w w w w
1 2 11 2 1
1 1 2 2 1 1
, , ,
, , ,n n n n
n n nn n
v w v w v w
w v w w ww w w w w w
kk
k
w
uw
Then form B″= { u1, u2, u3, . . . . , un } where each uk is given by
⁞

Ex. Use the Gram-Schmidt process on the basis { (1,1), (0,1) } to find an orthonormal basis for ℝ2.

Ex. Use the Gram-Schmidt process on { (1,1,0), (1,2,0), (0,1,2) } to find an orthonormal basis for ℝ3.
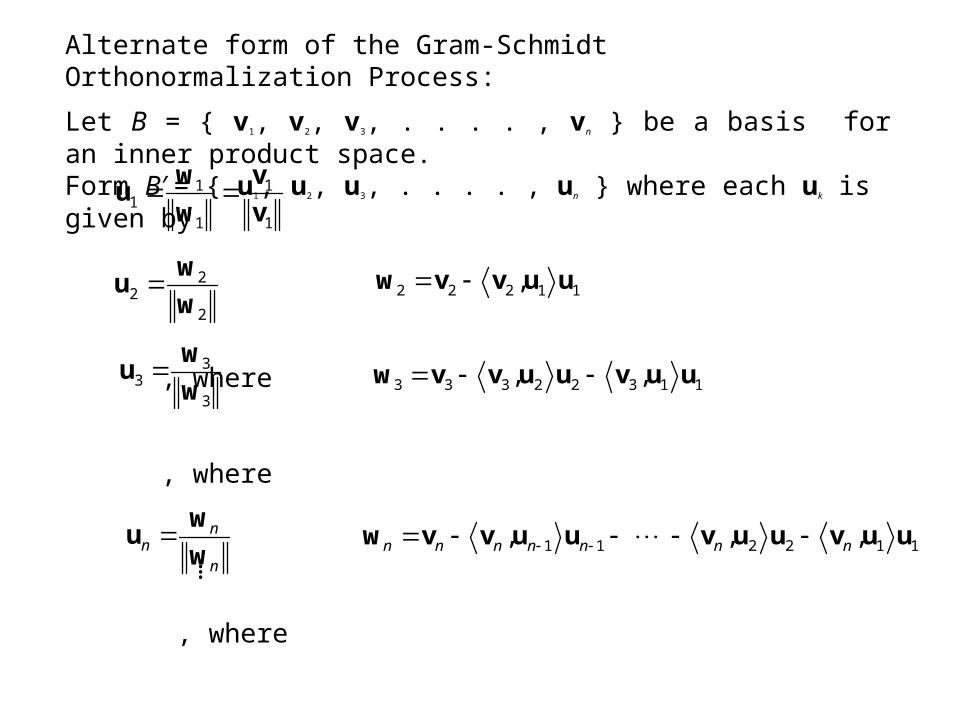
Alternate form of the Gram-Schmidt Orthonormalization Process:
Let B = { v1, v2, v3, . . . . , vn } be a basis for an inner product space.Form B′= { u1, u2, u3, . . . . , un } where each uk is given by
, where
, where
⁞
, where
1 11
1 1
w v
uw v
2 2 2 1 1, w v v u u22
2
w
uw
3 3 3 2 2 3 1 1, , w v v u u v u u3
33
w
uw
nn
n
w
uw 1 1 2 2 1 1, , ,n n n n n n n w v v u u v u u v u u

Ex. Find an orthonormal basis for the vector space of solutions to the homogenous set of equations:x1 + x2 + 7x4 = 0 2x1 + x2 + 2x3 + 6x4 = 0

Section 5.5Applications of Inner Product Spaces

Def. Let f be in C[a,b] and let W be a subspace of C[a,b]. A function g in W is called a least squares approximation of f with respect to W when the value of
is a minimum with respect to all other functions in W. 2
( ) ( )b
af x g x dx

Ex. Find the least squares approximation g(x) = a2x2 + a1x + ao of f (x) = ex on C[0,1].

Ex. Find the least squares approximation g(x) = a2x2 + a1x + ao of f (x) = ex on C[0,1].

Theorem Let f be in C[a,b] and let W be a finite dimensional subspace of C[a,b]. The least squares approximation function of f with respect to W is given by
g = < f , w1> w1 + < f , w2> w2 + …… + < f , wn> wn
where B = { w1, w2, w3, . . . . , wn } is an orthonormal basis for W.

Ex. Find the least squares approximation of sin(x) on [0, π] with respect to the subspace of all polynomial functions of degree two or less.

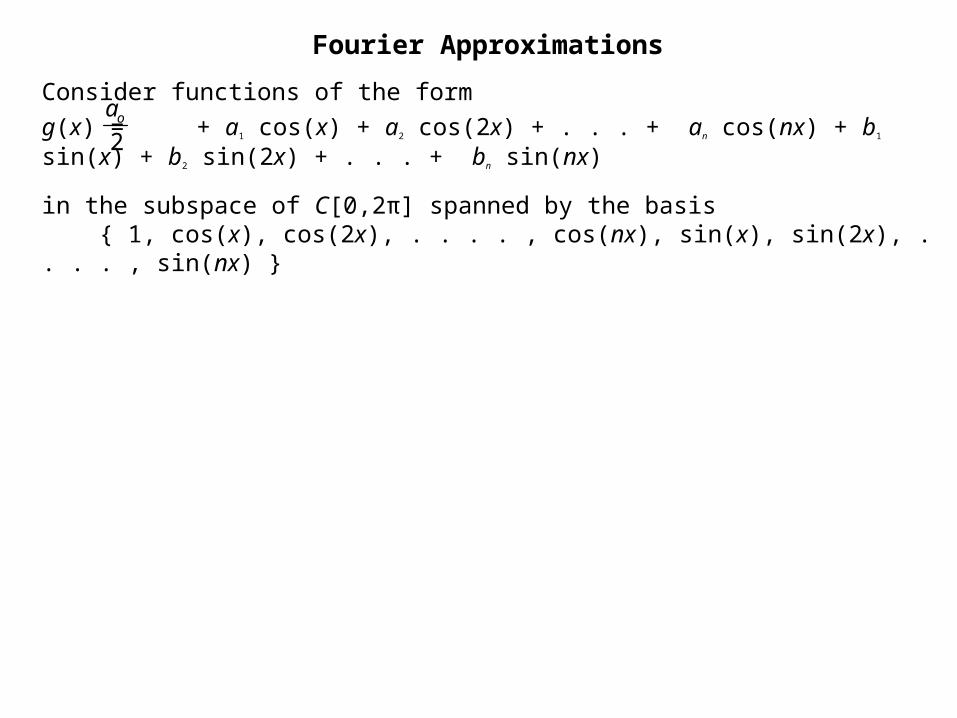
Fourier Approximations
Consider functions of the form
g(x) = + a1 cos(x) + a2 cos(2x) + . . . + an cos(nx) + b1 sin(x) + b2 sin(2x) + . . . + bn sin(nx)2
oa
Fourier Approximations
Consider functions of the form
g(x) = + a1 cos(x) + a2 cos(2x) + . . . + an cos(nx) + b1 sin(x) + b2 sin(2x) + . . . + bn sin(nx)
in the subspace of C[0,2π] spanned by the basis { 1, cos(x), cos(2x), . . . . , cos(nx), sin(x), sin(2x), . . . . , sin(nx) }
2oa
Fourier Approximations
Consider functions of the form
g(x) = + a1 cos(x) + a2 cos(2x) + . . . + an cos(nx) + b1 sin(x) + b2 sin(2x) + . . . + bn sin(nx)
in the subspace of C[0,2π] spanned by the basis { 1, cos(x), cos(2x), . . . . , cos(nx), sin(x), sin(2x), . . . . , sin(nx) } This is an orthogonal basis and if we normalize it we get a basis denoted as B = { wo, w1, w2 , . . . . , wn , wn+1, . . . . , w2n }
=
2oa

Fourier Approximations
Consider functions of the form
g(x) = + a1 cos(x) + a2 cos(2x) + . . . + an cos(nx) + b1 sin(x) + b2 sin(2x) + . . . + bn sin(nx)
in the subspace of C[0,2π] spanned by the basis { 1, cos(x), cos(2x), . . . . , cos(nx), sin(x), sin(2x), . . . . , sin(nx) } This is an orthogonal basis and if we normalize it we get a basis denoted as B = { wo, w1, w2 , . . . . , wn , wn+1, . . . . , w2n }
=
2oa
Fourier Approximations
Consider functions of the form
g(x) = + a1 cos(x) + a2 cos(2x) + . . . + an cos(nx) + b1 sin(x) + b2 sin(2x) + . . . + bn sin(nx)
in the subspace of C[0,2π] spanned by the basis { 1, cos(x), cos(2x), . . . . , cos(nx), sin(x), sin(2x), . . . . , sin(nx) } This is an orthogonal basis and if we normalize it we get a basis denoted as B = { wo, w1, w2 , . . . . , wn , wn+1, . . . . , w2n }
=
With this orthonormal basis we can write g(x) above as: g(x) = < f , wo> wo + < f , w1> w1 + < f , w2> w2 + …… + < f , w2n> w2n
2oa

Fourier Approximations
Consider functions of the form
g(x) = + a1 cos(x) + a2 cos(2x) + . . . + an cos(nx) + b1 sin(x) + b2 sin(2x) + . . . + bn sin(nx)
in the subspace of C[0,2π] spanned by the basis { 1, cos(x), cos(2x), . . . . , cos(nx), sin(x), sin(2x), . . . . , sin(nx) } This is an orthogonal basis and if we normalize it we get a basis denoted as B = { wo, w1, w2 , . . . . , wn , wn+1, . . . . , w2n }
=
With this orthonormal basis we can write g(x) above as: g(x) = < f , wo> wo + < f , w1> w1 + < f , w2> w2 + …… + < f , w2n> w2n
Then:
2oa
2
0
1( )oa f x dx
2
0
1( )cos( )ja f x jx dx
2
0
1( )sin( )jb f x jx dx

Fourier Approximations
Consider functions of the form
g(x) = + a1 cos(x) + a2 cos(2x) + . . . + an cos(nx) + b1 sin(x) + b2 sin(2x) + . . . + bn sin(nx)
The function g(x) is called the nth order Fourier approximation of f on the interval [0,2π].
2oa
2
0
1( )oa f x dx
2
0
1( )cos( )ja f x jx dx
2
0
1( )sin( )jb f x jx dx

Ex. Find the third order Fourier approximation of f(x) = x on [0, 2π].
![storage.googleapis.com€¦ · support@pra isecharts.com (800) 695-6293 W ]v oµ ]v Z W ] Z t} Z] v ^ ] W ] v ~> À oí À} oU ZÇ Zuv U]v µu v o W](https://static.fdocuments.us/doc/165x107/605be64b3bed1b6a777c1413/supportpra-isechartscom-800-695-6293-w-v-o-v-z-w-z-t-z-v-w-v-.jpg)


![' µ ] } ' } } / v µ Ç W ( } >W ' Ç o ] v D v P u v](https://static.fdocuments.us/doc/165x107/61aab2ceedff9c2fcf22fd04/-v-w-gtw-.jpg)


![v P Ç W ( } u v } v ~ W · 2020. 3. 13. · v P Ç W } i µ ] ] ] } v Z À ] Á ~ W Z ...](https://static.fdocuments.us/doc/165x107/60337f84fc549d45332fc996/v-p-w-u-v-v-w-2020-3-13-v-p-w-i-v-z-w.jpg)

![W Ç Z } Z u } o } P Ç Æ u ] v ] } v ( } W Ç Z } o } P ] ~W W · Æ u ] v ] } v ( } W Ç Z } o } P ] ~W W E / d , E KK< í ^WW t } ] ] } v } ( ^ v W } À ] v ] o W Ç Z } o } P](https://static.fdocuments.us/doc/165x107/5e4c6b6c7761ff04dc04ce4d/w-z-z-u-o-p-u-v-v-w-z-o-p-w-w-u-v-v.jpg)


![W ] v ,v }}l](https://static.fdocuments.us/doc/165x107/618e70f9ea4ff807647fa079/w-v-v-l.jpg)

![v P o > } v P Z ~> > t } v ] v P v Ç W o v ~ W](https://static.fdocuments.us/doc/165x107/623dbeca6dac1704aa669363/v-p-o-gt-v-p-z-gt-gt-t-v-v-p-v-w-o-v-w.jpg)
![u Z l } ( W D ] } v } Z ] ( } ( W } o ] D ] v v } o ] W ...](https://static.fdocuments.us/doc/165x107/62305858f378cd59376d1e9d/u-z-l-w-d-v-z-w-o-d-v-v-o-w-.jpg)

![W Z } W P ^ o ] } v v · 2020. 9. 24. · ^ ] } v õ W W Z r } ] } v U K µ r } ( r^ µ v U s } ] t / v Æ ( ] v Z } ] À ] } v W } µ r ] v o µ ] v P } µ r } ( r µ v v ] } v](https://static.fdocuments.us/doc/165x107/60501b3e634f3c5bf340ac21/w-z-w-p-o-v-v-2020-9-24-v-w-w-z-r-v-u-k-r-r.jpg)
