Seasonal influences on a prey–predator model
19
Click here to load reader
-
Upload
sidi-mohamed -
Category
Documents
-
view
212 -
download
0
Transcript of Seasonal influences on a prey–predator model

J. Appl. Math. Comput.DOI 10.1007/s12190-014-0857-3
ORIGINAL RESEARCH
Seasonal influences on a prey–predator model
Ali Moussaoui · Sidi Mohamed Bouguima
Received: 7 October 2014© Korean Society for Computational and Applied Mathematics 2014
Abstract In this paper we study a prey–predator system in a variable environment.We show that seasonal variation of water level has a strong impact on persistence orextinction of fish populations living in an artificial lake. We also, give sufficient con-ditions for the existence of a periodic solution. Examples together with their numericsimulations show the feasibility of the main results.
Keywords Predator–prey · Crowley–Martin functional response · Periodic solution ·Coincidence degree theorem
Mathematics Subject Classification 34D05 · 34D20 · 34D23
1 Introduction
The impact of water level fluctuations on the species communities has been widelystudied in rivers, lakes and reservoirs [14,20]. Depending on the spatial and temporalextension water level fluctuations can influence the dynamic and structure of the fishcommunity. Recently, in [7], the authors examine how seasonal variations in water levelaffect the outcome of prey–predator interactions in Pareloup lake in the south of France.The Pareloup lake is one of the five biggest artificial lakes in France, situated betweenRodez and Millau (1,260 ha, 168,106 m3). Its maximum depth is 37 m, and meandepth is 12.5 m, allowing to store water during seasons of high electricity demand.The management of this lake is of considerable ecological importance. Significantvariations of the water level of the lake can have a strong impact on the persistence ofsome species. In fact, the increase of the water volume hinders the capture of the prey
A. Moussaoui (B) · S. M. BouguimaDepartment of Mathematics, Faculty of Sciences, University of Tlemcen, Tlemcen, Algeriae-mail: [email protected]
123

A. Moussaoui, S. M. Bouguima
by the predator. The same reasoning applies when there is a decrease in the volumeof water, favoring the capture of the prey by the predator. The authors propose a newmodel to describe the interaction between roach species as prey and pike species aspredator. The obtained results indicate that the water level has a qualitative effect on thedynamic behavior of the prey–predator system. Very recently, Moussaoui et al., in [16]investigated a more complex interaction among three species living in the Parelouplake under seasonal succession, the authors showed that the system is permanentunder some appropriate conditions and obtained sufficient conditions which ensurethe existence of the positive 1-periodic solution (see [16]).
To describe a predator–prey relationship, it is necessary to specify the rate of preyconsumption by an average predator. This functional response largely determinesdynamic stability, responses to environmental influences and the nature of indirecteffects in the food web containing the predator–prey pair. In [7,16], the authors con-sidered the following as functional response:
g(u, v) = au
v + D(1)
Many other kinds of predator–prey models with Holling type, Leslie–Gower type andBeddington–DeAngelis type, etc. have been investigated extensively by the schol-ars (see [1–5,15,17] and the references cited therein). However, there are seldomliteratures to study the predator–prey systems with Crowley–Martin type functionalresponse [13,18,19], which was introduced by Crowley and Martin [8]. The Crowley-Martin functional response is classified as one of predator-dependent functionalresponses, which are functions of both prey and predator abundance because of preda-tor interference. It is assumed that predator-feeding rate decreases by higher predatordensity even when prey density is high, and therefore the effects of predator interfer-ence on feeding rate remain important all the time whether an individual predator ishandling or searching for a prey at a given instant of time. The per capita feeding ratein this formulation is given by
g(u, v) = a1u
1 + a2u + a3v + a2a3uv(2)
Here, a1, a2, a3 are positive parameters that describe the effects of capture rate, han-dling time and the magnitude of interference among predators, respectively, on thefeeding rate. Observe that if a2 = 0, a3 = 0, then Crowley–Martin type functionalresponse reduces to a linear mass-action function response (or Holling type I functionalresponse) [4,9]. If a2 > 0, a3 = 0, then Crowley–Martin type functional responsereduces to Michaelis–Menten (or Holling type II) functional response [10]. If a2 > 0and a3 > 0, the Crowley–Martin type functional response (2) reduces to the simpleform
g(u, v) = cu
(u + A) (v + B)(3)
Motivated by the above reasons, in this paper, we are concerned with the effects of thewater level on the global dynamics of the predator–prey systems with Crowley–Martinfunctional response. This is to look for conditions which guarantee the existence of
123

Seasonal influences on a prey–predator model
a positive periodic solution of the system with the same period as the coefficients,such a solution describes an equilibrium situation consistent with the variability ofenvironmental conditions and such that both populations survive. The trajectories inthe phase plane of these solutions of the nonautonomous system take the place of theequilibria points of the autonomous system. The significance of the paper is that theconditions are related to the values of the accessibility function c(t) which dependsdirectly on the water level of the lake.
An outline of the present paper is given as follows. In the next section, a briefdescription of the model is presented, In Sect. 3, we explore the dynamics of the modelinvolving invariance, permanence and extinction. In Sect. 4, we establish sufficientcriteria for the existence of positive periodic solution. Two examples are given inSect. 5 to illustrate the feasibility of our main results. A brief discussion is presentedin Sect. 6.
2 Prey–predator model
In the studied lake, the pike (Brochet in French) is the most important predator. Theroach (Gardon in French) is the prey. Let u(t) and v(t) be respectively the densitiesof the prey and predator at time t . When a predator attacks a prey, it has access to acertain quantity of food depending on the water level. When water level is low thepredator is more in contact with the prey. Let c(t) be the accessibility function forthe prey. It is assumed that the function c(t) is continuous, the minimum value c1 isreached in spring and the maximum value c2 is attained during autumn. The predatorneed a quantity γ for his food, but he has access to a quantity
c(t)u
(u + A) (v + B)
If
c(t)u
(u + A) (v + B)≥ γ
then the predator will be satisfied with the quantity γ for his food. Otherwise, i.e if
c(t)u
(u + A) (v + B)≤ γ
the predator will content himself with
c(t)u
(u + A) (v + B)
Consequently, the quantity of food received by the predator is
min(γ,
c(t)u
(u + A) (v + B)
)
123

A. Moussaoui, S. M. Bouguima
Accordingly, the prey–predator model can be expressed as
⎧⎪⎪⎨⎪⎪⎩
dudt = u (a − bu) − min
(γ, c(t) u
(u+A)(v+B)
)v
dvdt = −mv + e min
(γ, c(t) u
(u+A)(v+B)
)v
(4)
All the parameters in the model take positive values, a is the intrinsic growth rate ofthe prey, b is the intraspecific competition rate of the prey, e is the conversion rate ofnutrients into the reproduction of the predator, m is the death rate of the predator.
Throughout this paper, we assume that:
c2 < γ B (H1) (5)
a < m (H2) (6)
The existence and uniqueness of solution for (4) with initial conditions
u(0) = u0 > 0, v(0) = v0 > 0 (7)
result by the fundamental theory of functional differential equations [12], hence weomit the proof here.
3 Permanence
In this section, we will discuss the permanence (or uniformly persistent) of system(4). From biological point of view, persistence of a system means the survival of allpopulations of the system in future time. Mathematically, persistence of a systemmeans that strictly positive solutions do not have omega limit points on the boundaryof the non-negative cone. For discussing the permanence of system (4), we need thefollowing lemma and definition.
Lemma 1 [6] Suppose n is a positive integer and fi (t, x1, x2, ..., xn) (i = 1, 2, ..., n)
are smooth functions. If fi |xi =0,X∈Rn+ ≥ 0 (where X = (x1, x2, ..., xn)T ∈ Rn), thenRn+ is an invariant domain of the following equation:
dxi
dt= fi (t, x1, x2, ..., xn), i = 1, 2, ..., n. (8)
If fi |xi =0,X∈Rn+ ≤ 0 (where X = (x1, x2, ..., xn)T ∈ Rn), then Rn− is an invariantdomain of the above equations.
Definition 1 System (4) is said to be permanent (or uniformly persistent) if there ispositive constants m1, m2, M1 and M2 such that each positive solution (u(t), v(t)) ofthe system satisfies
123

Seasonal influences on a prey–predator model
m1 ≤ lim inft→+∞ u(t) ≤ lim sup
t→+∞u(t) ≤ M1
m2 ≤ lim inft→+∞ v(t) ≤ lim sup
t→+∞v(t) ≤ M2
and it is said to be non-persistent if there is a positive solution (u(t), v(t)) of (4)satisfying
min{lim inft→+∞ u(t), lim inf
t→+∞ v(t)} = 0
According to biological interpretation, we only consider the non-negative solutions ofthe system. Hence, the following assertion is of major importance.
Lemma 2 The non-negative quadrant of R2 is positively invariant with respect to (4).
Proof Denote that X = (u, v)T . For the system (4), we notice that
f1|u=0,X∈R2+ = u (a − bu) − min
(γ, c(t)
u
(u + A) (v + B)
)v|u=0,X∈R2+ = 0 ≥ 0,
f2|v=0,X∈R2+ = −mv + e min
(γ, c(t)
u
(u + A) (v + B)
)v|v=0,X∈R2+ = 0 ≥ 0.
By the previous lemma, we get that R2+ is an invariant domain of (4). ��Before proceeding further, we first rewrite (4) in a simpler form, we have the followingresult:
Theorem 1 Assume that conditions (H1), (H2) hold, then for all t ≥ 0,
c2u(t) < γ (u(t) + A) (v(t) + B) .
Proof Let
w(t) = c2u(t) − γ (u(t) + A) (v(t) + B)
Note that w(0) < 0 by condition (H1). It is claimed that w(t) < 0 for all t . If thiswere not the case, there exists t0 > 0 such that:
w(t0) = 0 anddw
dt(t0) ≥ 0
The condition w(t0) = 0 implies that:
c2u(t0) = γ (u(t0) + A) (v(t0) + B)
dw
dt(t0) = (c2 − γ (v(t0) + B))
du
dt(t0) − γ (u(t0) + A)
dv
dt(t0)
123

A. Moussaoui, S. M. Bouguima
then
dw
dt(t0) =
(c2 − γ (v(t0) + B)
)[u(t0)(a − bu(t0)) − c(t0)
u(t0)v(t0)
(u(t0) + A)(v(t0) + B)
]
− γ (u(t0) + A)[
− mv(t0) + ec(t0)u(t0)v(t0)
(u(t0) + A)(v(t0) + B)
]
It follows that:
dw
dt(t0) ≤ au(t0)(c2 − γ (v(t0) + B)) + γ mv(t0)(u(t0) + A)
≤ au(t0)(c2 − γ (v(t0) + B)) + m(c2u(t0) − γ B(u(t0) + A))
≤ aγ A (v(t0) + B) + m (c2u (t0) − γ B (u(t0) + A))
≤ a Ac2u (t0)
u(t0) + A+ m (c2u (t0) − γ B (u(t0) + A))
≤ A (ac2 − mγ B) + m (c2 − γ B) u (t0)
Conditions (H1)–(H2) imply that dwdt (t0) < 0 and we obtain a contradiction. This
implies that w(t) < 0 for all t ≥ 0. ��Consequently system (4) is reduced to the simple form
⎧⎪⎨⎪⎩
dudt = u (a − bu) − c(t) uv
(u+A)(v+B)
dvdt = −mv + ec(t) uv
(u+A)(v+B)
(9)
In order to facilitate the calculation, we define
M1 = a
b, M2 = ec2
m− B
m1 = a
b− c2
bA, m2 = ec1
m
m1
m1 + A− B.
Thus we have the following theorem.
Theorem 2 In addition to (H1), (H2), assume that
mi > 0, i = 1, 2 (10)
Then system (9) is permanent.
Proof Assume (u(t), v(t)) is an arbitrary positive solution of system (9), then the firstequation of system (9) yields
du(t)
dt≤ u(t)(a − bu(t)) = bu(t)(M1 − u(t))
123

Seasonal influences on a prey–predator model
it follows:lim supt→+∞
u(t) ≤ M1 (11)
Similarly, from the second equation of system (9) we get
dv(t)
dt≤ −mv(t) + ec2
v(t)
v(t) + B
≤ v(t)
(v(t) + B)(ec2 − m B − mv(t))
≤ mv(t)
(v(t) + B)(M2 − v(t))
and so,lim supt→+∞
v(t) ≤ M2 (12)
On the other hand, we get from system (9) that
du(t)
dt≥ u(t) (a − bu(t)) − c2
Au(t) = bu(t) (m1 − u(t))
it follows thatlim inft→+∞ u(t) ≥ m1 (13)
Condition (10) also implies that we could choose positive constant ε small enoughsuch that
mε1 = m1 − ε > 0 and mε
2 = ec1
m
mε1
mε1 + A
− B > 0
From (13), for above ε > 0, there exists a T enough large such that
u(t) ≥ m1 − ε = mε1 f or all t ≥ T (14)
Substitute (14) to the second equation of the system (9), for t ≥ T , we have
dv(t)
dt≥ v(t)
[− m + ec1
mε1
(mε1 + A)(v(t) + B)
]
≥ v(t)
(v(t) + B)
[(ec1
mε1(
mε1 + A
) − m B
)− mv(t)
]
≥ mv(t)
(v(t) + B)[mε
2 − v(t)]
which implieslim inft→+∞ v(t) ≥ mε
2 (15)
123

A. Moussaoui, S. M. Bouguima
Setting ε → 0 in above inequality leads to
lim inft→+∞ v(t) ≥ m2 (16)
(11), (12), (13), and (16) show that under the assumption of the Theorem 2, system(9) is permanent. This ends the proof of the Theorem 2. ��Remark 1 We established permanence which leads to a criterion of species survival.It is based on the values of the function c which depends directly on the water level ofthe lake. The result given by Theorem 2 has an interesting ecological interpretation,since it illustrates that suitable water levels can be advantageous in terms of speciessurvival.
Theorem 3 If M2 < 0 then system (9) is not persistent.
Proof If M2 < 0, then by the second equation of (9), it is not difficult to show that
dv(t)
dt≤(
− m + ec2
B
)v (17)
therefore
v(t) ≤ v0 exp
t∫
0
(− m + ec2
B
)dt (18)
which implies that lim inft→∞ v(t) = 0. ��
4 The model with periodic coefficients
In this section, we confine ourselves to the case when the parameter c in system (9)is annual periodic in t , that is, c is 1-periodic, and bounded below and above by c1and c2 respectively. From ecological point of view, the periodicity of c accounts forthe seasonality of the parameters over 1 year. We study the existence of at least onepositive periodic solution of this system. To do this, we will employ an alternativeapproach to establish some criteria in terms of the average of the related functionsover an interval of the common period. That is continuation theorem in coincidencedegree theory, which has been successfully used to establish criteria for the existenceof positive periodic solutions of some mathematical models of predator–prey type. Tothis end, we shall summarize in the following a few concepts and results from [11]that will be basic for this section.
Let X and Z be two Banach spaces, L : DomL ⊂ X → Z be a linear mapping,and N : X → Z be a continuous mapping. The mapping L will be called a Fredholmmapping of index zero if dimK er L = codim I mL < +∞ and I mL is closed inZ . If L is a Fredholm mapping of index zero and there exist continuous projectorsP : X → X and Q : Z → Z such that I m P = K er L , I mL = K er Q = I m(I − Q),it follows that L|DomL∩K er P : (I − P)X → I mL is invertible. We denote the inverseof that map by K P . If Ω is an open bounded subset of X , the mapping N will be called
123

Seasonal influences on a prey–predator model
L−compact on Ω if QN (Ω) is bounded and K P (I − Q)N : Ω → X is compact.Since I m Q is isomorphic to K er L , there exists an isomorphism J : I m Q → K er L .
Lemma 3 [11] (Continuation Theorem) Let X and Z be two Banach spaces and letL be a Fredholm mapping of index zero. Assume that N : Ω → Z is L-compact onΩ with Ω open bounded in X. Furthermore, assume that
(a) for each λ ∈ (0, 1), u ∈ ∂Ω ∩ DomL , Lu �= λNu,
(b) for each u ∈ ∂Ω ∩ DomL, QNu �= 0 and(c) deg (J QN , X ∩ K er L , 0) �= 0.
Then the equation Lu = Nu has at least one solution in Ω ∩DomL.
We now put
L1 = log(a
b
), l1 = log
1
b
(a − c2
A
)
L2 = log(ec2
m− B
), l2 = log
(ec1
m
1b (a − c2
A ) exp(−2a)
1b (a − c2
A ) exp(−2a) + A− B
)
The convention here is that log z = −∞ if z ≤ 0. To simplify our representation, weintroduce the following notation:
g =1∫
0
g(t)dt.
Theorem 4 Suppose that li > −∞ (i = 1, 2) then system (9) has at least one positive1-periodic solution.
Proof Consider the following equations:
⎧⎪⎨⎪⎩
x(t) = a − b exp (x(t)) − c(t) exp(y(t))(exp(x(t))+A)(exp(y(t))+B)
y(t) = −m + ec(t) exp(x(t))(exp(x(t))+A)(exp(y(t))+B)
(19)
where a, b, m, e, A, B and c(t) are the same as those in model (9). It is easy tosee that if (19) has a 1-periodic solution (x∗(t), y∗(t))T , then (u∗(t), v∗(t))T =(exp(x∗(t)), exp(y∗(t)))T is a positive 1-periodic solution to model (9). Therefore,to complete the proof, it suffices to show that system (19) has a 1-periodic solution.
To apply Lemma 3 to (19), we define
X = Z = {u = (x, y)T ∈ C(R, R2)/x(t + 1) = x(t), y(t + 1) = y(t)}
123

A. Moussaoui, S. M. Bouguima
and
‖u‖ = maxt∈[0,1]|x(t)| + max
t∈[0,1]|y(t)| u ∈ X (or Z).
where |.| denotes the Euclidean norm. Then it is easy to see that both X and Z areBanach spaces with the norm ‖.‖.
Let
N
[xy
]=[
N1
N2
]=⎡⎣
a − b exp (x(t)) − c(t) exp(y(t))(exp(x(t))+A)(exp(y(t))+B)
−m + ec(t) exp(x(t))(exp(x(t))+A)(exp(y(t))+B)
⎤⎦
and
L
[xy
]=[
xy
], P
[xy
]= Q
[xy
]=[
xy
],
[xy
]∈ X.
It is trivial to show that P and Q are continuous projectors such that
ImP = KerL, KerQ = ImL = Im(I − Q).
Then
ker L ={(x, y) ∈ X | (x, y) = (h1, h2) ∈ R2
}
ImL = {(x, y) ∈ Z |1∫
0
x(t)dt = 0,
1∫
0
y(t)dt = 0}
and dim ker L = 2 = co dim ImL. Since ImL is closed in Z .
Hence, L is a Fredholm mapping of index zero. Furthermore, the generalized inverse(to L): K p : ImL → DomL ∩ KerP is given by
K p
(xy
)=
⎡⎢⎢⎢⎢⎢⎢⎣
t∫
0
x(s)ds −1∫
0
t∫
0
x(s)dsdt
t∫
0
y(s)ds −1∫
0
t∫
0
y(s)dsdt
⎤⎥⎥⎥⎥⎥⎥⎦
123

Seasonal influences on a prey–predator model
Thus
QN
(xy
)=
⎛⎜⎜⎜⎜⎜⎜⎝
1∫
0
(a − b exp (x(t)) − c(t) exp(y(t))
(exp(x(t))+A)(exp(y(t))+B)
)dt
1∫
0
(−m + ec(t) exp(x(t))
(exp(x(t))+A)(exp(y(t))+B)
)dt
⎞⎟⎟⎟⎟⎟⎟⎠
K p (I − Q) N
(xy
)=
⎛⎜⎜⎜⎜⎜⎜⎝
t∫
0
N1(s)ds −1∫
0
t∫
0
N1(s)dsdt − (t − 12
) 1∫
0
N1(s)ds
t∫
0
N2(s)ds −1∫
0
t∫
0
N2(s)dsdt − (t − 12
) 1∫
0
N2(s)ds
⎞⎟⎟⎟⎟⎟⎟⎠
Clearly, QN and K p (I − Q) N are continuous. It is not difficult to show that
K p(I − Q)N (Ω)) is compact for any open bounded set Ω ⊂ X . Moreveover, QN(Ω)
is bounded. Thus, N is L-compact on Ω with any open bounded set Ω ⊂ X . In orderto apply the Lemma 3, we need to search an appropriate open bounded subset X . Inorder to do it, we use the operator equation Lu = λNu, λ ∈ (0, 1), therefore
⎧⎪⎪⎨⎪⎪⎩
x(t) = λ[a − b exp (x(t)) − c(t) exp(y(t))
(exp(x(t))+A)(exp(y(t))+B)
]
y(t) = λ[−m + ec(t) exp(x(t))
(exp(x(t))+A)(exp(y(t))+B)
] (20)
Suppose that (x, y)T ∈ X is an solution of (20) for a certain λ ∈ (0, 1), integrating(20) on both sides from 0 to 1 with respect to t , one obtain that
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
a = b
1∫
0
exp (x(t)) dt +1∫
0
c(t) exp(y(t))(exp(x(t))+A)(exp(y(t))+B)
dt
m = e
1∫
0
c(t) exp(x(t))(exp(x(t))+A)(exp(y(t))+B)
dt
(21)
From Eqs. (20)–(21), it follows that
1∫
0
|x(t)|dt = λ
1∫
0
|a − b exp(x(t)) − c(t)exp(y(t))
(exp(x(t)) + A)(exp(y(t)) + B)|dt
≤ 2a, (22)
123

A. Moussaoui, S. M. Bouguima
1∫
0
|y(t)|dt = λ
1∫
0
| − m + ec(t)exp(x(t))
(exp(x(t)) + A)(exp(y(t)) + B)|dt
≤ 2m, (23)
Since u ∈ X , there exist ςi , ηi ∈ [0, 1] i = 1, 2 such that
⎧⎨⎩
x(ς1) = mint∈[0,1] x(t), x(η1) = maxt∈[0,1] x(t)
y(ς2) = mint∈[0,1] y(t), y(η2) = maxt∈[0,1] y(t)(24)
From Eqs. (21) and (24), we can see
a ≥ b
1∫
0
exp(x(t))dt ≥ b exp(x(ς1))
that is,
x(ς1) ≤ log(a
b
)= L1 (25)
Then, from Eqs. (22) and (24) , we have
x(t) ≤ x(ς1) +1∫
0
|x(t)|dt ≤ L1 + 2a := H1 (26)
for all t ≥ 0On the other hand, from the first equation of (21) and (24), we also have
a ≤ b
1∫
0
exp ((η1)) dt + c2
A
then
x(η1) ≥ log
[1
b
(a − c2
A
)]= l1
Thus,
x(t) ≥ x(η1) −1∫
0
|x(t)| dt ≥ l1 − 2a := H2. (27)
which, together with (26), leads to
maxt∈[0,1] |x(t)| ≤ max{|H1|, |H2|} := B1. (28)
123

Seasonal influences on a prey–predator model
Also, from Equations (21) , and (24), we obtain
m ≤ ec21
(exp (y(ς2)) + B)
Thus we get
y(ς2) ≤ log(ec2
m− B
)= L2
then
y(t) ≤ y(ς2) +1∫
0
|y(t)| dt ≤ L2 + 2m := H3. (29)
The second equation of (21) also produces
m ≥ ec1
1∫
0
exp (x(t))
(exp (x(t)) + A) (exp (y(η2)) + B)dt
which implies that
y(η2) ≥ log(ec1
m
1b (a − c2
A ) exp(−2a)
1b (a − c2
A ) exp(−2a) + A− B
)= l2
It follows that
y(t) ≥ y(η2) −1∫
0
|y(t)| dt = l2 − 2m := H4 ≥ 0. (30)
for all t ≥ 0Equations (29) and (30) imply that
maxt∈[0,1] |y(t)| = max {|H3| , |H4|} := B2. (31)
For any solution u ∈ X of (20), we have ‖u‖ ≤ B1+ B2. and Clearly, Bi (i = 1, 2)
are independent of λ. Taking B4 = B1+ B2 + B3 where B3 is taken sufficiently largesuch that each solution (α∗, β∗)T of the following algebraic equation:
⎧⎪⎨⎪⎩
a − b exp (α) − c exp(β)(exp(α)+A)(exp(β)+B)
= 0
−m + ec exp(α)(exp(α)+A)(exp(β)+B)
= 0(32)
123

A. Moussaoui, S. M. Bouguima
satisfies∥∥∥(α∗, β∗)T
∥∥∥ = |α∗| + |β∗| < B4 (if it exists) and the following:
L1 + L2 < B4. (33)
We now take Ω = {u ∈ X | ‖u‖ < B4} . This satisfies the condition (a) in Lemma 3.When (x(t), y(t))T ∈ ∂Ω ∩KerL = ∂Ω ∩ R2. (x, y)T is a constant vector in R2 with‖x‖ + ‖y‖ = B4. If system (32) has at least one solution, then we have
QN
[xy
]=⎡⎣a − b exp (x) − c exp(y)
(exp(x)+A)(exp(y)+B)
−m + ec exp(x)(exp(x)+A)(exp(y)+B)
⎤⎦ �=
[00
].
If system (32) does not have a solution, we can directly obtain
QN
[xy
]�=[
00
].
Finally, we will prove that condition (c) is satisfied. To this end, we define a mapping
Hμ(z) = μQN(z) + (1 − μ) G(z), μ ∈ [0, 1] ,
where G : R2 → R2
G(z) =⎡⎣
a − b exp (x)
−m + ec exp(x)(exp(x)+A)(exp(y)+B)
⎤⎦
We have
Hμ(z) =⎡⎢⎣
a − b exp (x) − μc exp(y)(exp(x)+A)(exp(y)+B)
−m + ec exp(x)(exp(x)+A)(exp(y)+B)
⎤⎥⎦
By carrying out similar arguments to those above, one can easily show that any solutionz∗ = (x∗, y∗)T of the equation Hμ(z) = 0 ∈ R2 with μ ∈ [0, 1] satisfies
l1 ≤ x∗ ≤ L1,
l2 ≤ y∗ ≤ L2.
Thus, 0 /∈ Hμ(∂Ω ∩ KerL) for μ ∈ [0, 1], and then QN(∂Ω ∩ KerL) �= 0.
Let J = Id : ImQ → KerL the identity mapping. Because of homotopy invariancetheorem of topology degree, we have
deg(JQN, ∂Ω ∩ KerL, 0) = deg(QN, ∂Ω ∩ KerL, 0)
= deg(QN, ∂Ω ∩ R2, 0)
= deg(G, ∂Ω ∩ R2, 0)
123

Seasonal influences on a prey–predator model
Obviously, taking into account the hypothesis in theorem (4), the algebraic equation(34) ⎧⎨
⎩a − b exp (x) = 0
−m + ec exp(x)(exp(x)+A)(exp(y)+B)
= 0(34)
has a unique solution (x∗, y∗) which satisfies
x∗ = ln( ab )
y∗ = ln( ecm
exp(x∗)(exp(x∗)+A)
− B)(35)
So
deg(JQN, ∂Ω ∩ KerL, 0) = sgn
{det[−b exp(x∗) 0
∂ f (x∗,y∗)∂x
∂ f (x∗,y∗)∂y
]}
= −sgn
{b exp
(x∗) ∂ f (x∗, y∗)
∂y
}(36)
where deg(·,·,·) is the Brouwer degree [11] and f (x, y) = ec exp(x)(exp(x)+A)(exp(y)+B)
. Itis easy to see that the functions f (x, y) is decreasing in y. Then
∂ f (x, y)
∂y< 0. (37)
Combining (36) and ( 37) gives deg (JQN, ∂Ω ∩ KerL, 0) = +1 �= 0. This completesthe proof of condition 3. By now, we know that Ω satisfies all the requirements ofMawhin’s continuation theorem, and hence, system (19) has at least one 1-periodicsolution. Accordingly, system (9) has at least one 1-periodic solution with strictlypositive components. This completes the proof. ��
5 Application
As an application, we consider the following two systems:
5.1 System 6.1
In system (9), we choose a = 1, b = 0.5, m = 2, e = 0.8, A = 5, B = 0.005 andc(t) = 2 + sin(2π t). with initial conditions
(1) u(0) = 1.4, v(0) = 0.1;(2) u(0) = 1.2, v(0) = 0.2;(3) u(0) = 1.15, v(0) = 0.2,
respectively.
123

A. Moussaoui, S. M. Bouguima
0 5 10 15 201.1
1.15
1.2
1.25
1.3
1.35
1.4
1.45
1.5
t
u(t)
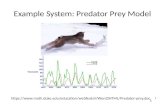
Fig. 1 Permanence and periodicity of species u
0 5 10 15 200.1
0.12
0.14
0.16
0.18
0.2
0.22
t
v(t)
Fig. 2 Permanence and periodicity of species v
It is easy to verify that the coefficients in system (6.1) satisfy all assumptions inTheorem 4, hence system (6.1) is permanent and admits at least one positive 1-periodicsolution. We illustrate by numerical simulations, the results of Theorem 4, (see Figs.1,2, 3).
5.2 System 6.2
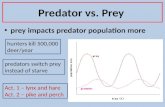
In this system, we let a = 1, b = 0.5, m = 2, e = 0.2, A = 5, B = 0.5 andc(t) = 2 + sin(2π t) with initial value (0.5, 1.8). It is easy to verify that the coeffi-cients of system (6.2) satisfy assumption of Theorem 3. It is obvious from Fig. 4, that
123

Seasonal influences on a prey–predator model
1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.45 1.50.1
0.12
0.14
0.16
0.18
0.2
0.22
u(t)
v(t)
Fig. 3 Phase portrait of system (6.1)
0 5 10 15 20−0.5
0
0.5
1
1.5
2
2.5
t
preypredator
Fig. 4 Orbit of non-persistent system (6.2) with respect to time
the predator is driven to extinction, i.e., there is no positive periodic solution of thesystem.
6 Discussion
In this paper, we analyze a prey–predator system with seasonal variation of water levelusing a more general functional response. The study demonstrates that the dynamics ofthe system depends heavily on the fluctuation of the water level. Our work have givensome valuable suggestions for saving the two species and regulating populations when
123

A. Moussaoui, S. M. Bouguima
the ecological and environmental parameters are affected by periodic factors. Froma biological point of view the most interesting results are the following. Water levelcan deform the asymptotic behavior of the system, because it changes the ecologicalbalance between the populations of prey and predator fish. We have shown that theconditions (H1), (H2) play a crucial role in the coexistence of the two species. Hence,if the function c which depends directly on the water level of the lake is between criticalvalues, then the two species can coexist. We have founded some new conditions thatensures the existence of a positive periodic solution to the model (4). The existenceof a positive periodic solution means that the system (4) cannot be cleared fully insome cases and will tend to fluctuate with the same period as that of the environmentaloscillation. On the contrary, from Theorem 3, if the water level is greater than a criticalvalue, then the predator will extinct. This disturbance caused by the change in the waterlevel can be minimized by a better control over the water level variation in Parelouplake, avoiding the occurrence of large disturbances on the fish species population. Theanalysis suggests that avoiding lowering water level too much, can increase the chanceof survival. Hence water management program should be established in such a waythat it does not alter the ratio of the prey–predator system.
Acknowledgments We would like to thank the referees and the editor for their careful reading of theoriginal manuscript and many valuable comments and suggestions that greatly improved the presentationof this work. This work was partially supported by the Franco-Algerian project: Tassili 10MDU800 and theNational Research Project: PNR 08/U13/1030.
References
1. Arditi, R., Ginzburg, L.R.: Coupling in predator–prey dynamics: ratio-dependence. J. Theor. Biol. 139,311–326 (1989)
2. Auger, P., Lett, C., Poggiale, J.C.: Modélisation mathématique en écologie. Dunod, Paris (2010)3. Aziz-Alaoui, M.A., Okiye, M.Daher: Boundedness and global stability for a predator–prey model with
modified Leslie–Gower and Holling-type II schemes. Appl. Math. Lett. 16(7), 1069–1075 (2003)4. Bazykin, A.D.: Nonlinear Dynamics of Interacting Populations. World Scientific, Singapore (1998)5. Berezovskaya, F., Karev, G., Arditi, R.: Parametric analysis of the ratio-dependent predator–prey model.
J. Math. Biol. 43, 221–246 (2001)6. Cao, F., Chen, L.: Asymptotic behavior of nonautonomous diffusive Lotka–Volterra model. Syst. Sci.
Math. Sci. 11(2), 107–111 (1998)7. Chiboub Fellah, N., Bouguima, S.M., Moussaoui, A.: The effect of water level in a prey–predator
interactions: a nonlinear analysis study. Chaos Solitons Fract. 45, 205–212 (2012)8. Crowley, P.H., Martin, E.K.: Functional responses and interference within and between year classes
of a dragonfly population. J. N. Am. Benthol. Soc. 8, 211–221 (1989)9. Edelstein-Keshet, L.: Mathematical Models in Biology. Random House, New York (1998)
10. Freedman, H.I.: Deterministic Mathematical Models in Population Ecology. Dekker, New York (1980)11. Gaines, R.E., Mawhin, J.L.: Coincidence Degree and Nonlinear Differential Equations. Springer-
Verlag, Berlin (1977)12. Hale, J.: Theory of Functional Differential Equations. Springer-Verlag, New York (1977)13. Jazar, N.A.M.: Global dynamics of a modified Leslie–Gower predator–prey model with Crowley Martin
functional responses. J. Appl. Math. Comput. 43, 271293 (2013)14. Kahl, U., Hlsmann, S., Radke, R.J., Benndorf, J.: The impact of water level fluctuations on the year
class strength of roach: implications for fish stock management. Limnologica 38, 258–268 (2008)15. Letellier, C., Aziz-Alaoui, M.A.: Analysis of the dynamics of a realistic ecological model. Chaos
Solitons Fract. 13(1), 95–107 (2002)
123

Seasonal influences on a prey–predator model
16. Moussaoui, A., Bouguima, S.M.: A prey–predator interaction under fluctuating level water. Math.Methods Appl. Sci. 38, 123–137 (2014)
17. Murray, J.D.: Mathematical Biology. Springer Verlag, Heidelberg (1989)18. Shi, X., Zhou, X., Song, X.: Analysis of a stage-structured predator–prey model with Crowley–Martin
function. J. Appl. Math. Comput. 36, 459–472 (2011)19. Upadhyay, R.K., Naji, R.K.: Dynamics of a three species food chain model with Crowley–Martin type
functional response. Chaos Solitons Fract. 42(3), 13371346 (2009)20. Wlosinski, J.H., Koljord, E.R.: Effects of water levels on ecosystems, an annotated bibliography, long
term resource monitoring program. Technical report 96–T007 (1996)
123