sdarticle16.pdf

of 13
Transcript of sdarticle16.pdf
-
7/28/2019 sdarticle16.pdf
1/13
Large torsion finite element model for thin-walled beams
Foudil Mohri a,c,*, Noureddine Damil b, Michel Potier Ferry c
a Nancy-Universite, Universite Henri Poincare, IUT Nancy-Brabois, Departement Genie Civil.
Le Montet. Rue du Doyen Urion CS 90137. 54601 Villers les Nancy, Franceb Laboratoire de Calcul Scientifique en Mecanique, Faculte des Sciences Ben MSik, Universite Hassan II Mohammedia, BP 7955 Sidi Othman
Casablanca, Moroccoc LPMM, UMR CNRS 7554, ISGMP, Universite Paul Verlaine-Metz, Ile du Saulcy, 57045 Metz, France
Received 13 November 2006; accepted 20 July 2007Available online 17 September 2007
Abstract
Behaviour of thin-walled beams with open section in presence of large torsion is investigated in this work. The equilibrium equationsare derived in the case of elastic behaviour without any assumption on torsion angle amplitude. This model is extended to finite elementformulation in the same circumstances where 3D beams with two nodes and seven degrees of freedom per node are considered. Due tolarge torsion assumption and flexuraltorsional coupling, new matrices are obtained in both geometric and initial stress parts of the tan-gent stiffness matrix. Incremental-iterative NewtonRaphson method is adopted in the solution of the nonlinear equations. Many appli-cations are presented concerning the nonlinear and post-buckling behaviour of beams under torsion and bending loads. The proposedbeam element is efficient and accurate in predicting bifurcations and nonlinear behaviour of beams with asymmetric sections. It is provedthat the bifurcation points are in accordance with nonlinear stability solutions. The convenience of the model is outlined and the limit ofmodels developed in linear stability is discussed. 2007 Elsevier Ltd. All rights reserved.
Keywords: Beam; Finite element; Nonlinear; Open section; Post-buckling; Thin-walled
1. Introduction
Thin-walled elements with isotropic or anisotropic com-posite materials are extensively used as beams and columnsin engineering applications, ranging from buildings toaerospace and many other industry fields where require-ments of weight saving are of main importance. Due to
their particular shapes resulting from the fabrication pro-cess, these structures always have open sections that makethem highly sensitive to torsion, instabilities and to imper-fections. The instabilities are then the most important phe-
nomena that must be accounted for in the design.Nevertheless most of these flexible structures can undergolarge displacements and deformations without exceedingtheir yield limit. For these reasons the computation of thesestructures must be carried out according to nonlinearmodels.
Vlasovs model [1] developed for small non-uniform tor-
sion has been commonly adopted in most theoretical andfinite element works on thin-walled elements with open sec-tions [25]. Recently, based on this model, Kim [6] investi-gated a finite element formulation with consideration ofsemi-tangential moments and rotations. Kwak [7] formu-lated a finite element analysis to account for warping effecton the nonlinear behaviour of open section beams, by usingthe Total Lagrangian formulation. Pi [8] and Turkalj [9]have introduced a correction in the rotation matrix by con-sidering higher order terms. They obtained improved mod-els for linear and nonlinear stability analyses.
0045-7949/$ - see front matter 2007 Elsevier Ltd. All rights reserved.
doi:10.1016/j.compstruc.2007.07.007
* Corresponding author. Address: Nancy-universite, Universite HenriPoincare, IUT Nancy-Brabois, Departement Genie Civil. Le Montet. Ruedu Doyen Urion CS 90137. 54601 Villers les Nancy, France. Tel.: +33 (0)383 68 25 77; fax: +33 (0)3 83 68 25 32.
E-mail address: [email protected] (F. Mohri).
www.elsevier.com/locate/compstruc
Available online at www.sciencedirect.com
Computers and Structures 86 (2008) 671683
mailto:[email protected]:[email protected] -
7/28/2019 sdarticle16.pdf
2/13
In the above studies, nonlinear terms such as flexuraltorsional coupling or shortening effects are usually ignored.Many other studies have been devoted to nonlinear behav-iour of these structures in bending and torsion and provedthat in large torsion, the shortening effect is important andthat the agreement of Vlasovs model is poor compared to
experimental results [1013]. On the other hand, it has beenchecked that pre-buckling deformations have a predomi-nant influence on the stability of thin-walled beams espe-cially in lateral buckling behaviour. Some analyticalsolutions including pre-buckling deformations have beencarried out [1416]. Many other finite element models havebeen formulated in finite and large torsion taking intoaccount shortening effect and pre-buckling deflections[1721]. The effects of pre-buckling and shear deformationon lateral buckling of composite beams have been recentlystudied by Machado [22]. Extensive research is developedrecently in the filed of curved thin-walled beams with steeland concrete materials [23,24].
A nonlinear finite element analysis has been developedby Attard [17] for isotropic elements. Finite torsionassumption has been admitted and trigonometric functionshave been limited to cubic approximations, respectively tocoshx 1
h2x2
and sinhx hx h3x6
, where hx is the twistangle. Recently, Ronagh [19] extended this model so thatit could be applied to variable cross-sections. The abovemodel has been successfully applied to the stability analysisof thin-walled elements either in buckling or lateral buck-ling behaviour. In the present work, a large torsion finiteelement model is investigated for elastic thin-walled beamswithout any assumption on the torsion angle amplitude.
The calculation of the tangent stiffness matrix is possiblethanks to the introduction of new trigonometric variablesc = (coshx 1) and s = sinhx. For the purpose, the equilib-rium equations and the material behaviour are established.Shortening effect, pre-buckling deflections and flexuraltor-sional coupling are naturally included. In the nonlinearfinite element analysis, we use a 3D beam element withtwo nodes and seven degrees of freedom per node includingwarping. In order to get the equilibrium paths, NewtonRaphson iterative method is utilized. The tangent stiffnessmatrix is carried out. Due to large torsion and flexuraltor-sional coupling, new matrices are obtained in both geomet-ric and initial stress parts of the tangent stiffness matrix.This element is incorporated in a homemade finite elementcode. In order to illustrate the accuracy and practical use-fulness of the proposed element, many examples are con-sidered in the numerical part. The convenience of themodel is outlined and the limit of models developed in lin-ear stability is discussed.
2. Kinematics
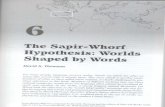
A straight thin-walled element with slenderness L andan open cross-section A is pictured in Fig. 1. A direct rect-angular co-ordinate system is chosen. Let us denote by x
the initial longitudinal axis and by y and z the first and sec-
ond principal bending axes. The origin of these axes islocated at the centre G. The shear centre with co-ordinates(yc, zc) in Gyz is denoted C. Consider M, a point on the sec-tion contour with its co-ordinates y;z;x;x being the sec-torial co-ordinate introduced in Vlasovs model for non-uniform torsion [1]. Hereafter, it is admitted that there is
no shear deformations in the mean surface of the sectionand the contour of the cross-section is rigid in its ownplane. The model will be applied to slender beams. Thismeans that local and distortional deformations are notincluded. Thin-walled open section beams possess largebending stiffness in comparison to torsion stiffness. In themodel, displacements and twist angle can be large butbending rotation are assumed to be small. Small deforma-tion are admitted and an elastic behaviour will be thenadopted in material behaviour. Under these conditions,displacements of a point M are derived from those of theshear centre as
uM u yv0
v0
c w0
s zw0
w0
c v0
s xh0
x;
1vM v z zcs y ycc; 2
wM w y ycs z zcc; 3
Eqs. (1)(3) are similar to the ones established in Attard[25], where ( ) 0 denotes the x-derivative. u is the axial dis-placement of centroid and v and w are displacements ofshear point in y and z directions. We have introduced inEqs. (2) and (3) two additional variables c and s:
c cos hx 1; s sin hx: 4a; b
Since the model is concerned with large torsion, the func-tions c and s are conserved without any approximation inboth theoretical and numerical analyses. In the case ofthin-walled beams, the components of Greens strain tensorwhich incorporate the large displacements are reduced tothe following ones:
exx e ykz zky xh00
x 1
2R2h
02x ; 5a
exy 1
2z zC
ox
oy
h
0x;
exz 1
2y yC
ox
oz
h
0x: 5b; c
In (5a), e denotes the membrane component, ky and kz arebeam curvatures about the main axes y and z and R definesthe distance between the point M and the shear centre C.They are given by
e u0 1
2v02 w02 wh0x;
R2 y yC2 z zC
2; 6a; b
ky w00 w00c v00s; kz v
00 v00c w00s: 6c; d
The variable w associated with membrane component in(6a) is defined by
w yCw0
w0
c v0
s zCv0
v0
c w0
s:
6e
672 F. Mohri et al. / Computers and Structures 86 (2008) 671683
http://-/?-http://-/?- -
7/28/2019 sdarticle16.pdf
3/13
In (5a), the first term is the contribution of membrane com-ponent e defined in (6a). The second and the third terms arerelated to bending about y and z axes. The fourth term iswell known and is related to warping effect. The last termis proportional to h02x . This nonlinear term, absent in Vla-sovs model, leads to nonlinear warping. Sometimes, it iscalled shortening term. According to relationships(6a,c,d) and excluding the warping term, all the other termsof the axial strain (5a) are then nonlinear.
3. Equilibrium equations
Equilibrium equations are derived from stationary con-ditions of the total potential energy:
dU dW 0: 7
Loads are applied on the external surface of the beam oA(Fig. 1b). Their components kFxe, kFye, kFze are supposedto be proportional to a parameter k. The strain energyand the external load variations can be written as
dU ZL
ZA
rxxdexx 2rxydexy 2rxzdexzdA dx; 8a
dW k
ZL
ZoA
FxeduM FyedvM FzedwMds dx; 8b
where rxx, rxy and rxz are the PiolaKirchhoff stress tensorcomponents, dexx, dexy, dexz are Greens strain tensor vari-ations. In the beam theory, it is more convenient to formu-late the strain energy variation in terms of the stressresultants (section forces) acting on cross-section. Basedon virtual strain deformation components and after inte-gration over the cross-section A, the strain energy variation
(8a) is given by
dU
ZL
Nde Mydky Mzdkz Msv dh
0x Bx dh
00x
1
2MR dh
0x
2
dx: 9
N is the axial force, My and Mz are the bending moments,Bx
is the bimoment acting on the cross-section and Msv isthe St-Venant torsion moment (Fig. 1c). MR is a higher or-der stress resultant called Wagners moment. Their defini-tions are available in Mohri [26]. According to therelationships (1)(3), one gets for the virtual displacement
components:
duM du ydv0 cdv0 sdw0 w0 w0c v0sdhx
zdw0 cdw0 sdv0 v0 v0c w0sdhx
xdh0x;
dvM dv ezdhx ezc eysdhx;
dwM dw eydhx eyc ezsdhx;
10ac
where ey and ez represent load eccentricities from shearpoint ey y yc; ez z zc. Taking into account therelations (10), one obtains for virtual work of externalloads dW:
dW k
ZL
Fxe du Fye dv Fzedw Mxe dhx Mye dw0
Mze dv0 Bxe dh
0xdx
k
ZL
Myec Mzesdw0 dx k
ZL
Mzec Myesdv0 dx
k
ZL
Fyefezc eysg Fzefeyc ezsg
Myev0 v0c w0s Mzew
0 w0c v0sdhx dx:
11
In (11), (Mye, Mze), Mxe and Bxe define respectively theexternal bending moments, the torsion moment and thebimoment. They are listed below in term of loadeccentricities:
Mye Fxez; Mze Fzey;
Mxe Fyeez Fzeey; Bxe Fxex: 12ad
In order to use matrix formulation, the following vectorsare introduced:
fSgt N My Mz Msv Bx MRf g; 13a
fcgt e ky kz h0
x h00
x12h02x
; 13b
fqgt u v w hxf g; 13c
fhgt u0 v0 w0 h0x v00 w00 h
00x hx
; 13d
fFegt Fxe Fye Fze Mxef g; 13e
fMegt 0 Mze Mye Bxe 0 0 0 0f g; 13f
fagt c s wf g; 13g
where {}t denotes the transpose operator. In (13), {S} and{c} define stress and deformation vectors. Vectors {q} and{h} are displacement and displacement gradient vectors.
Load forces are arranged in two components {F} and
z
x
yG
C(yc zc)
M(x,y,z,)
x
w
v
uN
Msv
GC
Mz
MyB
(x,y,z,)
Fye
Fze
Fxe
,
/2
Fig. 1. Open section thin-walled beam: (a) kinematics; (b) spatial loads, (c) stress resultants.
F. Mohri et al. / Computers and Structures 86 (2008) 671683 673
-
7/28/2019 sdarticle16.pdf
4/13
{M} which are the conjugate of {q} and {h}. The lastvector {a}, which includes trigonometric functions c, sand the variable w will be called rotation vector. Itscomponents depend on trigonometric functions of the twistangle and the flexuraltorsional coupling. Based on (13),one gets the following matrix formulation of the initial
problem (7):ZL
fdcgtfSgdx k
ZL
fdqgtfFegdx k
ZL
fdhgtfMegdx
k
ZL
fdhgtMx1fagdx k
ZL
fdqgtMx2fhg
Mx3 Mx4hfagdx 0: 14
The first term is related to the strain energy variation. Theother terms are the contribution of the external loading.The first two terms of the virtual external load work repre-sent constant load contribution. They are familiar in beamtheory and lead to the right-hand side of the equilibrium
equations. The other terms will contribute to the stiffnessmatrix if a nonlinear analysis is undertaken. They dependnonlinearly on displacement and load eccentricities. Thematrices [Mx1] to [Mx4], functions of load eccentricities,are listed below:
Mx1
0 0 0
Mze Mye 0
Mye Mze 0
0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
266666666666664
377777777777775
;
Mx2
0 0 0
0 0 0
0 0 0
Fyeez Fyeey 0
Fzeey Fzez
26666664
37777775
15a; b
Mx3
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 00 Mye Mze 0 0 0 0 0
26664
37775;
Mx4h
0 0 0
0 0 0
0 0 0Myev
0
Mzew0
Myew0
Mzev0
0
2666664
3777775:15c; d
The present model is applied in the case of an elastic behav-iour. In such a context and denoting by E and G theYoungs and shear moduli, the relationships between thestress vector components in terms of deformation vector
components are the following in the principal axes:
N
ZA
Eexx dA EAe 1
2EAI0h
02x ; 16a
My
ZA
EexxzdA EIyky bzh02
x ; 16b
Mz
ZAEexxydA EIzkz byh
02x ; 16c
Msv 2Z
A
Gexz y yc ox
oz
Gexy z yc
ox
oy
dA GJh0x; 16d
Bx
ZA
EexxxdA EIxh00
x bxh02
x ; 16e
MR EAI0e 2EIzbykz 2EIybzky
2EIxbxh00
x 1
2EIRh
02x : 16f
These equations written in matrix formulation lead to
fSg
N
My
Mz
Msv
Bx
MR
8>>>>>>>>>>>>>>>:
9>>>>>>>>=>>>>>>>>;
EA 0 0 0 0 EAI0
0 EIy 0 0 0 2EIybz
0 0 EIz 0 0 2EIzby
0 0 0 GJ 0 0
0 0 0 0 EIx 2EIxbxEAI0 2EIybz 2EIzby 0 2EIxbx EIR
2666666664
3777777775
e
ky
kz
h0
x
h00x12h
02x
8>>>>>>>>>>>>>>>:
9>>>>>>>>=>>>>>>>>; Dfcg: 16g
[D] is the material matrix behaviour. Its terms are functionsof elastic and geometric characteristics. A denotes the sec-tion area. Iy and Iz are second moments of area about y andz axes. J and Ix are respectively the St-Venant torsion andthe warping constant. I0 is the polar moment of area aboutshear centre. by, bz and bx are Wagners coefficients. IR isthe fourth moment of area about shear centre. Theirexpressions have been shown in Mohri [26] and an efficientnumerical method for their computation is described inAppendix A of this paper.
The equilibrium equations (14) and the elastic materialbehaviour (16) are derived in the context of large torsion.They are function of vectors {q}, {c}, {h}, {a} and theirvariations {dq}, {dc}, {dh}. Nevertheless, both vectors
{c}, {a} and their variations are nonlinear and highly cou-
674 F. Mohri et al. / Computers and Structures 86 (2008) 671683
-
7/28/2019 sdarticle16.pdf
5/13
pled. According to (6ac), the strain vector {c}, defined in(13b), is split into a linear part and two nonlinear parts as
fcg
e
ky
kz
h0x
h00x12h02x
8>>>>>>>>>>>>>>>:
9>>>>>>>>=>>>>>>>>;
u0
w00
v00
h0
x
h00
x
0
8>>>>>>>>>>>>>>>:
9>>>>>>>>=>>>>>>>>;
1
2
v02 w02
0
0
0
0
h02
x
8>>>>>>>>>>>>>>>:
9>>>>>>>>=>>>>>>>>;
wh0xw00c v00s
v00c w00s
0
0
0
8>>>>>>>>>>>>>>>:
9>>>>>>>>=>>>>>>>>; fclg fcnlhg fcnlah; ag: 17a
{cl} is the classical linear part, {cnl(h)} and {cla(h,a)} arethe nonlinear parts related to quadratic and flexuraltor-sional coupling terms. These three parts can be easily for-mulated in term of the vector {h} by introducing threematrices [H], [A(h)] and [A
a(a)] as indicated below:
fclg
1 0 0 0 0 0 0
0 0 0 0 0 1 0
0 0 0 0 1 0 0
0 0 0 1 0 0 0
0 0 0 0 0 0 1
0 0 0 0 0 0 0
0
0
0
0
0
0
266666664
377777775
u0
v0
w0
h0
x
v00
w00
h00
x
hx
8>>>>>>>>>>>>>>>>>>>>>>>:
9>>>>>>>>>>>>=>>>>>>>>>>>>;
Hfhg;
18a
fcnlhg 1
2
0 v0 w0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 h
0
x 0 0 0
0
0
0
0
0
0
266666664
377777775
u0
v0
w0
h0
x
v00
w00
h00
xhx
8>>>>>>>>>>>>>>>>>>>>>>>:
9>>>>>>>>>>>>=>>>>>>>>>>>>;
1
2Ahfhg;
18b
fcnlah;ag
0 0 0 w 0 0 0
0 0 0 0 s c 0
0 0 0 0 c s 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
0
0
0
0
0
0
266666664
377777775
u0
v0
w0
h0xv00
w00
h00
x
hx
8>>>>>>>>>>>>>>>>>>>>>>>:
9>>>>>>>>>>>>=>>>>>>>>>>>>;
Aaafhg:
18c
Matrices [H] and [A(h)] are classical in nonlinear structuralmechanics. Matrix [A
a(a)] takes into account large torsion
and flexuraltorsional coupling. In this way, the deforma-tion {c} is obtained in term of {h} as
fcg H 1
2Ah Aaa
fhg: 19
Applying variation to (19) and using the fact that thematrices [A(h)] and [Aa(a)] depend linearly on vectors {h}and {a}, {dc} is established as
fdcg Hfdhg Ahfdhg Aaafdhg Aadafhg:
20
The last term in the right-hand side of (20) can be writtenas a product of a matrix bAh depending on {h} and thevector {da}:
Aadafhg dwh
0x
v00 ds w00dc
v00 dc w00ds
8>:9>=>;
0 0 h0xw00 v00 0
v00 w00 0
0 0 0
0 0 0
0 0 0
26666666643777777775
dcds
dw
8>:9>=>;
bAhfdag: 21According to definition (13g) for {a} and its componentsintroduced in (4a, 4b and 6e), one gets for the variationof the two first components:
dc sdhx; ds c 1dhx: 22a; b
The third componentdW of {
da} is derived from (6e) and(22a,b). After some arrangement, {da} is written in terms
of {dh} and a new matrix [P(h,a)] as
fdag
0 0 0 0 0 0 0 s
0 0 0 0 0 0 0 c 1
0 Qc RC 0 0 0 0 Pc
264375
du0
dv0
dw0
dh0x
dv00
dw00
dh00
x
dhx
8>>>>>>>>>>>>>>>>>>>>>>>>>:
9>>>>>>>>>>>>>=>>>>>>>>>>>>>; Ph; afdhg: 22c
The coefficients Pc, Qc and Rc utilized in the matrix P(h,a)are given by
Pc yCw0s v0c 1 zCv
0s w0c 1; 22d
Qc yCs zCc 1; 22e
Rc yCc 1 zCs: 22f
Finally, injecting (22c) into (21), the last term in the right-hand side of(20) can be written in terms of {dh} and a newmatrix
eAh; a is introduced as
Aadafhg bAhPh; afdhg eAh; afdhg: 23
F. Mohri et al. / Computers and Structures 86 (2008) 671683 675
http://-/?-http://-/?-http://-/?-http://-/?- -
7/28/2019 sdarticle16.pdf
6/13
The above relationship permits us to write the vector {dc}in (20) in terms of {dh}. One arrives to
fdcg H Ah Aaa eAh; afdhg: 24Based on formulas (19) for {c} and (24) for {dc}, one gets
the matrix formulation of the equilibrium equations (14)and the material behaviour (16g) into the following system:RL
fdhgtH Ah Aaa
bAh; atfSgdx k RL
fdqgtfFeg fdhgtfMegdx
;
kR
LfdhgtMx1fag fdqg
tMx2fhg
fdqgtMx3 Mx4hfagdx
0
fSg D H 12
Ah Aaa
fhg:
8>>>>>>>>>>>>>:25a; b
In this way, the elastic equilibrium equations have been de-
rived without any assumptions about the torsion angleamplitude. Trigonometric functions c = coshx1 ands = sinhx have been included in the analysis and nonlinearand highly coupled kinematic relationships have beenencountered. Due to consideration of large torsion, newmatrices [Aa(a)] and eAh; a depending on trigonometricfunctions c and s and flexuraltorsional coupling have beenintroduced. Alternatively, in external work, effects of loadeccentricities have been considered. This leads to new sec-ond order bending moments and second order torsion mo-ments involving the trigonometric functions c and s.Consequently, other matrices [Mx1], [Mx2], [Mx3] and[Mx4(h)] have been introduced. In what follows, a beam fi-
nite element will be formulated in the same circumstances.Nevertheless, in nonlinear analysis, only constant load con-tribution will be considered. The contribution of eccentricloads from centroid and shear point to second memberand tangent stiffness matrix is not included in the presentpaper (terms in second line of the equilibrium equation(25a)). Extensive work is done by the authors in order tomake this possible in future. This work is actually in pro-gress including the asymptotic numerical method for solu-tion of nonlinear problems [27].
4. Finite element discretisation
In literature about thin-walled beams with open section,warping deformation is of primary importance. For thisreason, the warping is considered as an independent dis-placement with regard to classical 3D beams. In mesh pro-cess, 3D beams elements with 14 degrees of freedom arecommonly utilized. Linear shape functions are assumedfor axial displacements and cubic functions for the otherdisplacements (i.e. v, w, hx) are used in natural co-ordinate[2,3,17]. Some other works have adopted hyperbolic shapefunctions for torsion angle [18,28,29].
In the present study, the beam of slenderness L is
divided into some finite elements of length l. Each element
is modelled with 3D beams elements with two nodes andseven degrees of freedom per node. The adopted shapefunctions are available in Lin [30] and Batoz [31].
The vectors {q} and {h} and their variations {dq} and{dh} are related to nodal variables {r} and {dr} by
fq
g N
fr
ge;
fdq
g N
fdr
ge;
fhg Gfrge; fdhg Gfdrge;26a; d
where [N] is the shape functions matrix and [G] is a matrixwhich links the nodal displacements to the gradient vector{h}. In the framework of finite element method, the equi-librium equations and the material behaviour are then writ-ten asP
e
l2
R11
fdrgteBh; atfSgdn k
Pe
l2
R11
fdrgteffgedn 0
fSg D Bl 12 Bnlh Bnlaa frge
8