Sd4 tignes 2013-2
54
Epstein Department of ISE Stochastic Decomposition Suvrajeet Sen Lecture at the Winter School April 2013
-
Upload
data-driven-decisions-lab -
Category
Documents
-
view
150 -
download
1
Transcript of Sd4 tignes 2013-2

Epstein Department of ISE
Stochastic Decomposition
Suvrajeet Sen
Lecture at the Winter School
April 2013

Epstein Department of ISE
The Plan – Part I ( 70 minutes)• Review of Basics: 2-stage Stochastic Linear Programs (SLP)• Deterministic Algorithms for 2-stage SLP
– Subgradients of the Expected Recourse Function– Subgradient Methods– Deterministic Decomposition (Kelley/Benders/L-shaped)
• Stochastic Algorithms for 2-stage SLP– Stochastic Quasi-gradient Methods– Sample Average Approximation– Stochastic Decomposition (SD) Algorithm
• Computational Results

Epstein Department of ISE
Review of Basics: 2-stage Stochastic Linear Programs

Epstein Department of ISE
• Let be a random variable defined on a probability space
• 2-stage SLP is given by
• In this notation– is the value function of an LP– is a polyhedral set
The commonly stated 2-stage SLP (will be stated again, as needed)

Epstein Department of ISE
The Recourse Function and its Expectation
• denotes an outcome
•Note the “Fixed-Recourse” assumption (i.e. D is fixed). Assuming that h is finite, LP duality implies
• and moreover,
h (𝑥 ,𝜔𝑛)= {Min𝑑❑⊤𝑢𝑛
s . t .𝑢𝑛∈𝑈𝑛 (𝑥 ) ,𝑈𝑛 (𝑥 )={𝑢𝑛|𝐷𝑢𝑛≤𝑏𝑛−𝐶𝑛 𝑥 }}

Epstein Department of ISE
Wait a minute!• Can we compute • If we have a few outcomes, Yes.
– Deterministic Algorithms for SP– Or in specialized models (e.g. newsvendor problems) we can
integrate (with low-dimensional integration)• What if we have a large number of outcomes, then what
do these operations mean? Multi-dimensional Integration LP Value and Subgradients
– This operation MUST be approximated (Dyer/Stougie [06])

Epstein Department of ISE
One Approach: Use Sampling
• Replace each by sampled estimates– Stochastic algorithms for SP
• Some cautionary advice for sampling! – Introduces sampling error in estimation – Could sampling errors introduce loss of
convexity in approximation? • Yes, if we are not careful!

Epstein Department of ISE
Deterministic Algorithms for 2-stage SLP
Subgradient Method, Kelley/Benders/L-shaped Method

Epstein Department of ISE
Subgradient Method (Shor/Polyak/Nesterov/Nemirovski…)
•At iteration k let be given
•Let
•Then, where denotes the projection operator on the set of the decisions and,
•As mentioned earlier, is very difficult to compute!
•No concern about loss of convexity due to sampling
Interchange of Expectation and Subdifferentiation is required here

Epstein Department of ISE
• Strengths– Easy to Program, no master problem, and easily parallelizable– Recently there have been improvements in step size rules
• Weaknesses– Difficult to establish lower bounds (optimality, in general)– Traditional step-size rules (e.g. Constant/k) Need a lot of fine tuning– Convergence
• Method makes good progress early on, but like other steepest-descent type methods, there is zig-zagging behavior
– Need ways to stop the algorithm• Difficult because upper and lower bounds on objective values are difficult to
obtain
Strengths and Weaknesses of Subgradient Methods

Epstein Department of ISE
• Let be a random variable defined on a probability space
• Then a stochastic program is given by
Kelley’s Cutting Plane/Benders’/L-shaped Decomposition for 2-stage SLP
h (𝑥 ,𝜔𝑛)= {Min𝑑❑⊤𝑢𝑛
s . t .𝑢𝑛∈𝑈𝑛 (𝑥 ) ,𝑈𝑛 (𝑥 )={𝑢𝑛|𝐷𝑢𝑛≤𝑏𝑛−𝐶𝑛 𝑥 }}
Epstein Department of ISE
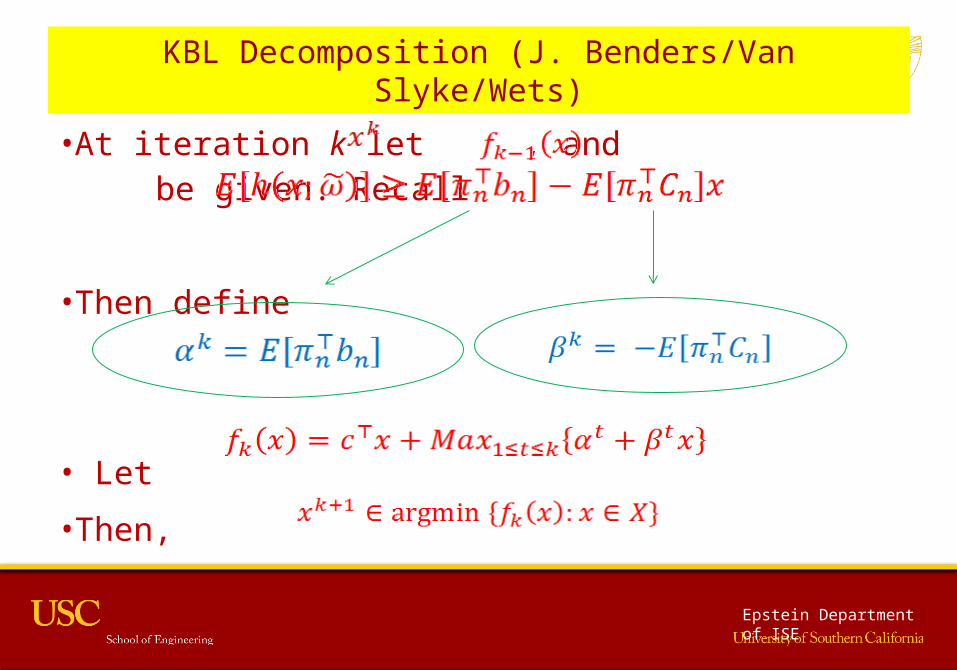
KBL Decomposition (J. Benders/Van Slyke/Wets)
•At iteration k let , and be given. Recall
•Then define
• Let
•Then,

Epstein Department of ISE
Comparing Subgradient Method and KBL Decomposition
•Both evaluate subgradients
•Expensive Operation (requires solving as many second-stage LPs as there are scenarios)
•Step size in KBL is implicit (user need not worry)
•Master program grows without bound and looks unstable in the early rounds
•Stopping rule is automatic (Upper Bound – Lower Bound ≤ ε)
•KBL’s use of master can be a bottleneck for parallelization

Epstein Department of ISE
KBL Graphical Illustration
Expected Recourse Function
Approximation: fk-1
Approximation: fk

Epstein Department of ISE
Regularization of the Master Problem (Ruszczynski/Kiwiel/Lemarechal …)
•Addresses the following issue:– Master program grows without bound and looks unstable in
the early rounds
•Include an incumbent and a proximity measure from the incumbent, using σ >0 as a weight:
•Particularly useful for Stochastic Decomposition.
Epstein Department of ISE
Stochastic Algorithms for 2-stage SLP
Stochastic Quasi-Gradient, SAA, and SD

Epstein Department of ISE
Some “concrete” instances
ProblemName
Domain # of 1st stage variab
les
# of 2nd stage
variables
# of random
variables
Universe of
scenarios
Comment
LandS Generation 4 12 3 Made-up20TERM Logistics 63 764 40 Semi-real
SSN Telecom 89 706 86 Semi-realSTORM Logistics 121 1259 117 Semi-real
Table 1: SP Test Instances
Notice the size of scenarios. Using a deterministic algorithm would be a “non-starter”
Epstein Department of ISE
Numerous Large-scale Applications
• Wind-integration in Economic Dispatch– How should conventional resources be dispatched
in the presence of intermittent resources? • Supply chain planning
– Inventory Transhipment between Regional Distribution Centers, Local Warehouses, Outlets
• “Everyone” wants to “solve” Stochastic Unit Commitment

Epstein Department of ISE
So what do we mean by “solve”?
I. At the very least– An algorithm which, under specified assumptions,
will provide• A first-stage decision, with known metrics of optimality.
That is, report statistically quantified error• Be reasonably fast on easily accessible machines
II. There are other things that people want
Epstein Department of ISE
Stochastic Quasi-gradient Method (SQG) (Ermoliev/ Gaivoronski/Lan/Nemirovski/Uryasev …)
•At iteration k let be given. Sample
•Replace of subgradient optimization with its unbiased estimate
•Then,
with
and

Epstein Department of ISE
Comments on SQG
•Because this is a sampling-based algorithm, you must replicate so that you can estimate “variability” (of what?)
•If you replicate M times, you will get M first-stage decisions. Which of these should you use?– Could evaluate each of the M first-stage decisions, and then choose the one with
smallest objective estimate
– For realistic models, this can be computationally time-consuming
•Could simply choose the mean of replications– Less expensive, but may be unreliable
•But most importantly, it does not provide lower bounds

Epstein Department of ISE
Sample Average Approximation (SAA, Shapiro, Kleywegt, Homem-de-Mello, Linderoth, Wright ….)
•Choose a sample size N; Solve a sampled problem; Repeat M times
•Since you replicate M times, you will get M decisions. Which of these should you use?
– Could evaluate each of the M decisions, and then choose the one with smallest estimate
• For realistic models, this can be computationally time-consuming
– Could simply choose the mean of replications
• Less expensive, but may be unreliable
•Very widely cited, sometimes misused (because some non-expert users appear to choose M=1)!

Epstein Department of ISE
Stochastic Decomposition (SD)
• Allow arbitrarily many outcomes (scenarios) including continuous random variables
• Perhaps interface with a simulator …
h (𝑥 ,𝜔𝑛)= {Min𝑑❑⊤𝑢𝑛
s . t .𝑢𝑛∈𝑈𝑛 (𝑥 ) ,𝑈𝑛 (𝑥 )={𝑢𝑛|𝐷𝑢𝑛≤𝑏𝑛−𝐶𝑛 𝑥 }}

Epstein Department of ISE
Some Central Questions for SP
• Instead of choosing a sample size at the start, can we decide how much to sample, on-the-fly?– The analogous question for nonlinear programming would be:
instead of choosing the number of iterations at the start, can we decide the number of iterations, on-the-fly? – Yes!
– So can we do this with sample size selection? Perhaps!• If we are to determine a sample size on-the-fly, what is the
smallest number by which to increment the sample size, and yet guarantee asymptotic convergence?

Epstein Department of ISE
Under some assumptions …
• Fixed Recourse Matrix • Current computer Implementations assume
– Relatively complete recourse (under revision)– Second-stage cost is deterministic (under revision)
Epstein Department of ISE
Approximating the recourse function in SD
• At the start of iteration k, sample one more outcome … say ωk independently of
• Given let solve the following LP
• Define and calculate for
• Notice the mapping of outcomes to finitely many dual vertices.

Epstein Department of ISE
Approximation used in SD
• The estimated “cut” in SD is given by
• To calculate this “cut” requires one LP corresponding to the most recent outcome and the “argmax” operations at the bottom of the previous slide
• In addition all previous cuts need to be updated … to make old cuts consistent with the changing sample size over iterations.
Epstein Department of ISE
Update Previous Cuts
• Updating previously generated subgradients– Why?– Because … early cuts (based on small sizes) can cut
away the optimum for ever!
– What should we do?
Expected Recourse Function
An Early Cut can Cause Trouble

Epstein Department of ISE
How do we get around this?
• Suppose we assume that we know a lower bound (e.g. zero) on hn(x), then we can include such a lower bound to the older cuts so that these older cuts “fade” away.
Expected Recourse Function
An Early Cut can Cause Trouble

Epstein Department of ISE
Updating Previous Cuts.
• If we assume that all recourse function lower bounds are uniformly zero, – Then for t < k, the “cut” from iteration t has the following
form:

Epstein Department of ISE
Alternative Sampled Approximations
Sampled Expected Recourse Function (SAA)
Linearization of the Sampled ERF (SA or SQG)Lower Bound on the
Linearization of the sample mean (SD-cut)
UpdatedCuts fromPrevious Iterations of SD
Expected Recourse Function

Epstein Department of ISE
SUMMARY OF APPROXIMATIONS
SAA
SA
SD

Epstein Department of ISE
Incumbent Solutions and Proximal Master Program (QP) … also called Regularized Master Program
• An incumbent is the best solution “estimated” through iteration k and will be denoted
• Given an incumbent, we setup a proximal master program as follows.
where,

Epstein Department of ISE
Benefits of the Proximal Master
• Can show that a finite master problem, consisting of n1+3 optimality cuts is enough! (Here n1 is the number of first-stage variables)
• Convergence can be proven to a unique limit which is optimal (with probability 1).
• Stopping rules based on QP duality are reasonably efficient.

Epstein Department of ISE
Algorithmic Summary0. Initialize with the same candidate and incumbent x. k=1.
1. Use sampling to obtain an outcome 2. Derive an SD cut at the candidate, and the incumbent solutions.
This calls for
- solution of 2 subproblems using - Add any new dual vertex to a list
- for each prior choose the best subproblem dual vertex seen thus far
3. Update cut t by multiplying coeffs by (t/k), 4. Solve the updated QP master5. Ascertain whether new candidate becomes new incumbent6. If stopping rules are not met, increment k, and repeat from 1. (Stopping rule is based on bootstrapping primal and dual QPs)
k
k
kt
t1}{
kt ...1
Vk
Epstein Department of ISE
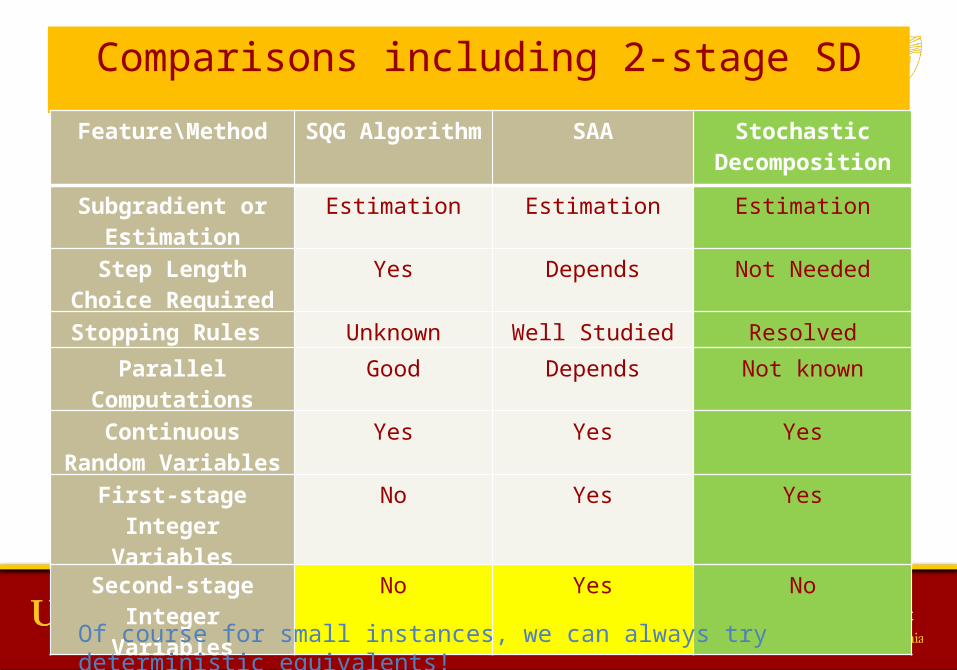
Comparisons including 2-stage SD
Feature\Method SQG Algorithm SAA Stochastic
Decomposition
Subgradient or Estimation
Estimation Estimation Estimation
Step Length Choice Required
Yes Depends Not Needed
Stopping Rules Unknown Well Studied Resolved
Parallel Computations Good Depends Not known
Continuous Random Variables
Yes Yes Yes
First-stage Integer Variables
No Yes Yes
Second-stage Integer Variables
No Yes No
Of course for small instances, we can always try deterministic equivalents!
Epstein Department of ISE
The Plan – Part II• Resume (from Computational Results)• How were these obtained?
– SD Solution Quality• In-sample optimality tests• Out-of-sample, Demo (Yifan Liu)
• An Example: Wind Energy with Sub-hourly Dispatch
• Summary
Epstein Department of ISE
Recall this question: What do we mean by “solve”?
I. At the very least– An algorithm which, under specified assumptions,
will provide• A first-stage decision, with known metrics of optimality.
That is, report statistically quantified error• Be reasonably fast on easily accessible machines
II. There are other things that people want

Epstein Department of ISE
What else to people want?
There are other things that people want• Evidence
– Experiment with some realistic instances• Please note that CEP1 and PGP2 are not realistic. They are for debugging!
– Some numerical controls• E.g. Can we reduce “bias”/non-optimality?
• Output for decision support– Dual estimates of first-stage– Histograms
• Recourse function • Dual prices of second-stage

Epstein Department of ISE
Some “concrete” instances
ProblemName
Domain # of 1st stage variab
les
# of 2nd stage
variables
# of random
variables
Universe of
scenarios
Comment
LandS Generation 4 12 3 Made-up20TERM Logistics 63 764 40 Semi-real
SSN Telecom 89 706 86 Semi-realSTORM Logistics 121 1259 117 Semi-real
Table 1: SP Test Instances
Notice the size of scenarios. Using a deterministic algorithm would be a “non-starter”

Epstein Department of ISE
Computational Results - SAA
Instance NameUpper (UB) and Lower Bounds
(LB)
SAA Estimates using a Computational Grid
Average Values 95% CI’s
LandSOBJ-UB 225.624 0.005OBJ-LB 225.62 0.02
20TERMOBJ-UB 254311.55 5.56OBJ-LB 254298.57 38.74
SSNOBJ-UB 9.913 0.022OBJ-LB 9.84 0.10
STORMOBJ-UB 15498739.41 19.11OBJ-LB 15498657.8 73.9
Table 2: Statistical Quantification with SAA
Source: • Linderoth, Shapiro and Wright,
Annals of Operations Research, Vol. 142, pp. 215–241 (2006)
• Computational Configuration:Grid Computing Using 100’s of PCs, but only 100 PCs at any given time
Comment by SS: In 2005, an average PC was a Pentium IV, Clock Speed: 2-2.4 GHz.
Each instance of SSN took 30-45 mins. of wall clock time.Replications: 7-10

Epstein Department of ISE
One Example: SSN with Latin Hypercube Sampling
Sample Size Lower Bound Upper Bound
50 10.10 (+/- 0.81) 11.38 (+/- 0.023)
100 8.90(+/- 0.36) 10.542 (+/-0.021)
500 9.87 (+/-0.22) 10.069(+/- 0.026)
1000 9.83(+/- 0.29) 9.996 (+/- 0.025)
5000 9.84 (+/- 0.10) 9.913 (+/- 0.022)

Epstein Department of ISE
PC Configuration for SD
• Mac Book Air• Processor: Intel Core i5• Clock Speed: 1.8 GHz• 4 GB of 1600 MHz DDR3 Memory• Replications: 30 for each.

Epstein Department of ISE
Computational Results - SD
Instance NameUpper (UB) and Lower Bounds
(LB)
SAA Estimates using a Computational Grid SD Estimates using a Laptop
Average Values 95% CI’s Average Values 95% CI’s
% Difference in Avg.Values
LandSOBJ-UB 225.624 0.005 225.54 0.64 0.037%
OBJ-LB 225.62 0.02 225.24 0.64 0.168%
20TERMOBJ-UB 254311.55 5.56 254476.87 1005.86 0.065%
OBJ-LB 254298.57 38.74 253905.44 162.49 0.154%
SSNOBJ-UB 9.913 0.022 9.91 0.05 0.03%
OBJ-LB 9.84 0.10 9.76 0.16 0.813%
STORMOBJ-UB 15498739.41 19.11 15498624.37 48176.76 0.0007%
OBJ-LB 15498657.8 73.9 15496619.98 4615.85 0.013%
Table 3: Statistical Quantification with SAA and SD

Epstein Department of ISE
SD Solution quality and time • Solutions are of comparable quality• Processors are somewhat similar• Solution times
– The comparable time for SSN is 50 mins for 30 replications on one processor
– Compare: – (30-45) mins x (7 – 10) replications x 100 procs (21000 – 45000)
processor mins– Note: This is only time for sample size of 5000. (But remember, there
were other sample sizes: 50, 100, 500, …, which we didn’t count)• Are we beating Moore’s Law? Yes, doubling computational
speed every 9 months?

Epstein Department of ISE
How were these obtained? • In-sample stopping rules: Lower Bounds
– Check Stability in Set of Dual Vertices– Bootstrapped duality gap estimate
• The latter tests whether the current primal and dual solutions from the Proximal Master Program are also reasonably “good” solutions for Primal and Dual Problems of a Resampled Proximal Master over Multiple Replications
• Out-of-sample: Upper Bounds

Epstein Department of ISE
Stability in Set of Dual Vertices• Are new dual vertices making a difference?
– At each iteration, check mean and variability of the following ratio over a window of size L
, where for , we define
• If the sequence | is small, over a window of size L, then, Dual vertices are stable

Epstein Department of ISE

Epstein Department of ISE
Primal and Dual Regularized Values
Primal Problem
Dual Problem
Bootstrapping: Resample Cuts, and evaluate primal obj. at
Use estimated dual solution in Resampled DualThe difference in value gives one gap estimateRepeat M times to get in-sample gap estimates. If 99% satisfy tolerance level, then in-sample rule is satisfied.

Epstein Department of ISE
Loose Tol.
Nominal Tol.
Tight Tol.
Bias/Non-opt Reduction

Epstein Department of ISE
SSN: Sonet-Switched NetworkSolution and evaluation time for 20’s replications (Tight)
Replication No. Solution Time (s) Evaluation Time (s)0 313.881051 588.6271841 203.690471 651.0422272 465.949416 547.5179963 313.606587 589.4298284 355.160629 599.3318085 334.764385 616.6748996 529.661100 604.5656307 327.888471 545.1320398 169.432233 655.6885309 301.293535 604.098964
10 697.304541 567.36143311 315.097318 532.59502612 247.439006 555.66437413 560.934417 577.25890014 342.787909 506.83677415 247.356803 570.57769016 184.941379 517.99921417 339.951593 589.26595818 339.381007 579.03326319 411.092300 602.349102
Total 7001.614151 11601.050839
Evaluation value ranges from 9.944203 to10.279154(3.3% difference)

Epstein Department of ISE
Solutions
• Mean of Replications: Average all Solutions• For each seed s, let
where fs denotes the final approximation for seed s
• Compromise solution:

Epstein Department of ISE
Upper Bounds
• For each replication, the objective function evaluations can be very time consuming
• We report Objective of both Mean and Compromise Solutions
Epstein Department of ISE
Main Take Away
In SP,Numerical Optimization Meets Statistics
So When You Design Algorithms, Don’t Forget What You Need to Deliver: Statistics
Most Numerical Optimization Methods were Not Designed for This Goal.
• Does Speed-up with SD beat Moore’s Law? Yes, doubling computational speed every 9 months!