Schlesinger transformations for the second and third...
48
Schlesinger transformations for the second and third members of a third Painlev´ e hier- archy A. H. Sakka Department of Mathematics, Islamic University of Gaza, Gaza, Palestine e-mail: [email protected] Fax Number: (+972)(7)2863552 JNMP Conference 4-14 June 2013
Transcript of Schlesinger transformations for the second and third...

Schlesinger transformations for the second
and third members of a third Painleve hier-
archy
A. H. Sakka
Department of Mathematics,
Islamic University of Gaza,
Gaza, Palestine
e-mail: [email protected]
Fax Number: (+972)(7)2863552
JNMP Conference 4-14 June 2013

Abstract
In this article, we derive the Schlesinger trans-
formations for second and third members of a
third Painleve hierarchy.
Using the Schlesinger transformations, we ob-
tained the corresponding Backlund transforma-
tions for each of the considered equations.
Furthermore we discussed some special solutions
of the second and third members of the third
Painleve hierarchy.

Introduction
The six Painleve equations, PI-PVI, are foundby P. Painleve and B. Gambier as the only irre-ducible second-order ordinary differential equa-tions (ODEs) whose general solutions are freefrom movable critical points.
One of the important properties of the Painleveequations is the existence of Schlesinger trans-formations, that is transformations that trans-form the solutions of the associated linear prob-lem but preserve the monodromy data.
The Schlesinger transformations of PII-PVI havebeen studied by M. Jimbo, T. Miwa, and K.Ueno A., Fokas, U. Mugan , A. Sakka.

Recently there are much interest in higher or-
der analogues of the Pianleve equations. Hier-
archies of Painleve equations are important ex-
amples of higher order analogues of the Pianleve
equations because the connection between these
hierarchies of Painleve equations and integrable
partial differential equations.
A first Painleve hierarchy was given by Kudryashov,
and Airault was the first to derive a second
Painleve hierarchy. After that, Gordoa, Joshi
and Pickering have used non-isospectral scat-
tering problems to derive new second Painleve
hierarchies and new fourth Painleve hierarchies.

In this article, we present a method to obtainthe Schlesinger transformations for the secondand third members of a third Painleve hierar-chies given in
”Linear problems and hierarchies of Painleve equa-tions”,
J. Phys. A: Math. Theor., 42 (2009) 025210.
These transformations lead to new Backlundtransformations for these equations.
The Schlesinger transformations for some mem-bers of second and fourth Pianleve hierarchiesare derived by A. Sakka and M. EL-KAHLOUT.

PIII hierarchy
We will consider the following PIII hierarchy
RnIII
(uv
)+ 2
n−2∑i=1
KiRn−iIII
(uv
)
+x
(ux − 2u2v
−vx − 2u(v2 − γ3)
)+ γ1
(uv
)
=
(1− uγ2
), n ≥ 2,
(1)
where RIII is the operator
RIII =
(Dx − 2uv + 2uD−1
x vx−2(v2 − γ3) + 2vD−1
x vx− 2u2 + 2uD−1
x ux−Dx − 2uv + 2vD−1
x ux
).
(2)

This hierarchy can be obtain as the compatibility
condition of the following linear system
∂Φ
∂λ= A(λ)Φ(λ),
∂Φ
∂x= B(λ)Φ(λ),
(3)
where
B = B0λ+B1, A =n+1∑j=0
Ajλn−j−1. (4)
The first member of the PIII hierarchy (1), that
is n = 1, is the PIII equation.

The second member of the PIII hierarchy
The second member of PIII hierarchy (1) reads
uxx = (6uv − x)ux − 6u3v2 + 2xu2v
+ 2γ3u3 − (γ1 + 1)u+ 1,
vxx = −(6uv − x)vx − 2u(3uv − x)(v2 − γ3)− γ1v + γ2.
(5)
We set γ3 = 1, without loss of generality (by
scaling u, v and x if necessary).
Equation (5) can be obtained as the compati-
bility condition of the following linear system of

equations
∂Φ
∂λ= A(λ)Φ(λ),
∂Φ
∂x= B(λ)Φ(λ),
(6)
where B = B0λ+B1 and A =3∑
j=0
Ajλ1−j, with
B0 = 12σ3, B1 =
(0 uw
−1w [vx + u(v2 − 1)] 0
),
A0 = 12σ3, A3 =
(v w
−1w (v2 − 1) −v
),
Aj =
(aj bjcj −aj
), j = 1,2,
(7)

σ3 is the Pauli matrix
σ3 =
(1 00 −1
)(8)
and aj, bj, cj are given as by
a1 = 12x, b1 = uw,
c1 =−1
w[vx + u(v2 − 1)],
a2 = u[vx + u(v2 − 1)] + 12γ1,
b2 = w[ux − 2u2v + xu],
c2 =1
w[(ux − 4u2v + xu)(v2 − 1)− 2uvvx − γ1v + γ2].
(9)
The auxiliary function w satisfies
wx = −2uvw. (10)

Direct Problem
The aim of the direct problem is to establish the
analytic structure of Φ with respect to λ in the
entire complex λ-plane. Since (6.a) is a linear
ODE in λ, the analytic structure is completely
determined by its singular points.
The equation (6.a) has irregular singularities at
λ =∞ and λ = 0.

Solution about λ =∞
The solution Φ(λ) of (6) in the neighborhood
of the irregular singular point λ = ∞ has the
formal expansion
Φ∞ = Φ∞λD∞eQ∞(λ), (11)
where
Φ∞ = (I + φ∞1λ−1 + . . . ),
D∞ = 12γ1σ3,
Q∞(λ) = 14(λ2 + 2xλ)σ3,
[A0, φ∞1] +A1 = 12xσ3.
(12)
The actual asymptotic behavior of Φ changes in
certain sectors of the complex λ-plane.

These sectors are determined by
Re(1
4λ2 +
1
2xλ) = 0;
thus for large λ the sectors are asymptotic tothe rays argλ = π
4(2j − 3), j = 1,2, . . . ,4.
Let Φ∞,j(λ), j = 1,2,3,4 be solutions of (6)such that det Φ∞,j(λ) = 1 and Φ∞,j(λ) ∼ Φ∞as |λ| → ∞ in the sectorS∞,j : π
4(2j − 3) ≤ argλ < π4(2j − 1).
Then the solutions Φ∞,j(λ) are related by theStokes matrices, G∞,j, as follows
Φ∞,j+1(λ) = Φ∞,j(λ)G∞,j, j = 1,2,3,
Φ∞,1(λ) = Φ∞,4(λe2πi)G∞,4e−2πiD∞,
(13)

where
G∞,2j−1 =
(1 a2j−10 1
),
G∞,2j =
(1 0a2j 1
), j = 1,2.
(14)

Solution about λ = 0
The solution Φ(λ) of (6) in the neighborhood of
the irregular singular point λ = 0 has the formal
expansion
Φ0 = P Φ0λD0eQ0(λ), (15)
where
Φ0 = I + φ01λ−1 + . . . ,
P =
(wρ1 wρ2
−(v − 1)ρ1 −(v + 1)ρ2
),
D0 = 12γ2σ3, Q0(λ) = −λσ3.
(16)
The actual asymptotic behavior of Φ changes in
certain sectors of the complex λ-plane.

These sectors are determined by Re(−θ0λ) = 0;
thus the sectors are asymptotic to the rays
argλ = π2(2j − 3), j = 1,2.
Let Φ0,j(λ), j = 1,2, be solutions of (6) such
that det Φ0,j(λ) = 1 and Φ0,j(λ) ∼ Φ0 as |λ| → 0
in the sector S0j : π
2(2j − 3) ≤ argλ < π2(2j − 1).
Then the solutions Φ0,j(λ) are related by the
Stokes matrices, G0,j, as follows
Φ0,2(λ) = Φ0,1(λ)G0,1,
Φ0,1(λ) = Φ0,2(λe2πi)G0,2e−2πiD0,
(17)
where
G0,1 =
(1 b10 1
), G0,2 =
(1 0b2 1
). (18)

Monodromy Data
The relation between Φ0(λ) and Φ∞(λ) is givenby
Φ∞(λ) = Φ0(λ)E, (19)
where
E =
(c1 c2c3 c4
), det(E) = 1. (20)
The monodromy data
a1, a2, a3, a4, b1, b2, c1, c2, c3, c4
satisfies the consistency condition
E−1G0,1G0,2e−2πiD0E =
4∏j=1
G∞,je−2πiD∞. (21)

Schlesinger Transformations
Let Φ(λ) be solution of (6) with parameters
γ1, γ2 and let Φ(λ) be solution of (6) with pa-
rameters γ1, γ2.
We consider transformation
Φ(λ) = R(λ)Φ(λ) (22)
such that Φ(λ) and Φ(λ) have the same mon-
odromy data.
Let γ1 = γ1 + n,
γ2 = γ2+m. Then (21) is invariant if n±m ∈ 2Z.

All possible Schlesinger transformations admit-
ted by equation (6) may be generated by the
following transformationsγ1 = γ1 + 1γ2 = γ2 + 1
,
R(1)(λ) =
(1 00 0
)λ1/2 +
(u(v − 1) uw
v−1w 1
)λ−1/2,
γ1 = γ1 − 1γ2 = γ2 + 1
,
R(2)(λ) =
(0 00 1
)λ1/2 +
(1 w
v−1r1w
r1v−1
)λ−1/2,

γ1 = γ1 + 1γ2 = γ2 − 1
,
R(3)(λ) =
(1 00 0
)λ1/2 +
(u(v + 1) uw
v+1w 1
)λ−1/2,
γ1 = γ1 − 1γ2 = γ2 − 1
,
R(4)(λ) =
(0 00 1
)λ1/2 +
(1 w
v+1r1w
r1v+1
)λ−1/2,
where r1 = vx + u(v2 − 1).

We have
R(i)(λ, x; u, v, γ1, γ2)R(j)(λ, x;u, v, α, β) = I,
(23)
for (i, j) = (3,2) and (i, j) = (1,4). Moreover
R(1)(λ)R(2)(λ) =
(0 00 1
)λ+
(−1
2u −12w
2w 0
).
(24)
The Schlesinger transformation (24) shifts the
parameters as γ1 = γ1 + 2, γ2 = γ2

Backlund Transformations
The linear equation (6.a) is transformed under
the Schlesinger transformations defined by the
transformation matrices R(j), j = 1,2,3,4 as
follows:
∂Φ
∂λ= A(λ)Φ(λ),
A(λ) = [R(j)(λ)A(λ) +∂
∂λR(j)(λ)]R−1
(j)(λ).
(25)
Using (60.b) we can derive the Backlund trans-
formations between solutions u(x) and v(x) of
(5), with parameters γ1 and γ2, and solutions
u(x) and v(x) of (5), with parameters γ1 and
γ2.

The Backlund transformations corresponding tothe Schlesinger transformations R(j), j = 1,2,3,4may be listed as follows:
R(1) : v = 1− uΩ2,
u =ux − u2(v + 1)
u[uΩ2 − 2],
γ1 = γ1 + 1, γ2 = γ2 + 1,
(26)
R(2) : v = −1−[vx + u(v2 − 1)]Ω2
(v − 1)2,
u =1− vΩ2
,
γ1 = γ1 − 1, γ2 = γ2 + 1,
(27)

R(3) : v = −1 + uΓ2,
u =−ux + u2(v − 1)
u[uΓ2 − 2],
γ1 = γ1 + 1, γ2 = γ2 − 1,
(28)
R(4) : v = 1 +[vx + u(v2 − 1)]Γ2
(v + 1)2,
u =(v + 1)
Γ2,
γ1 = γ1 − 1, γ2 = γ2 − 1,
(29)
where
Ω2 = 2uvx − 2(v − 1)(ux + xu)+ 2u2(v − 1)(3v + 1) + γ1 − γ2

Γ2 = 2uvx − 2(v + 1)(ux + xu)+ 2u2(v + 1)(3v − 1) + γ1 + γ2

Special Solutions
In this section, we will derive special solutions for
(5). The Backlund transformation (26) breaks
down when
ux − u2(v + 1) = 0 (30)
and
uΩ2 − 2 = 0. (31)
Solving (30) for v and substituting into (31) ,
we obtain
uxx = (6u+x)ux−4u3−2xu2 +1
2(γ2− γ1)u+ 1.
(32)

However u and v satisfy (5). This implies that
γ1 and γ2 must satisfy
γ2 + γ1 + 2 = 0.
Therefore we have shown that if γ2 = −(γ1+2),
then (5) admits special solution v = u−2ux − 1
and u is a solution of equation
uxx = (6u+x)ux−4u3−2xu2−(γ1+1)u+1. (33)
The Backlund transformation (27) breaks down
when v = 1 and γ2 = γ1. Substituting these
values into (5) we obtain
uxx = (6u−x)ux−4u3+2xu2−(γ1+1)u+1. (34)

Therefore we have shown that if γ2 = γ1, then(5) admits special solution v = 1 and u is asolution of equation (34).
The Backlund transformation (28) breaks downwhen
ux − u2(v − 1) = 0 (35)
and
u2[2uvx−2(v+1)(ux+xu)+2u2(v+1)(3v−1)+γ1+γ2]−2u = 0.(36)
Solving (35) for v and substituting into (36) ,we obtain
uxx = −(6u−x)ux−4u3 +2xu2−1
2(γ2−γ1)u+1.
(37)

However u and v satisfy (5). This implies thatγ1 and γ2 must satisfyγ2 − γ1 − 2 = 0. Therefore we have shown thatif γ2 = γ1 + 2, then (5) admits special solutionv = u−2ux + 1 and u is a solution of equation
uxx = −(6u− x)ux− 4u3 + 2xu2− (γ1 + 1)u+ 1.(38)
The Backlund transformation (29) breaks downwhen v = −1 and γ2 = −γ1. Substituting thesevalues into (5) we obtain
uxx = −(6u+ x)ux− 4u3− 2xu2− (γ1 + 1)u+ 1.(39)
Therefore we have shown that if γ2 = −γ1, then(5) admits special solution v = −1 and u is asolution of equation (39).

Application of the Backlund transformations
One can use the transformations (26)-(29) toobtain infinite hierarchies of elementary solu-tions of (5). For example, let us apply the trans-formation (26) to the following solution of (5):
γ2 = γ1 = α, v = 1 and u is a solution of (34).
Then we obtain a new solution
γ1 = α+ 1, γ2 = γ1, v = 1
and u is a solution of the equation
uxx = (6u−x)ux−4u3+2xu2−(γ1+1)u+1. (40)

The application of the transformation (29) to
the solution γ2 = γ1 = α, v = 1 and u is a
solution of (34) yields the new solution
γ1 = α− 1, γ2 = γ1, v = 1 and u is a solution of
the equation (40).
Thus we can obtain a hierarchy of special solu-
tions γ1 = α+ n,
γ2 = γ1, n ∈ Z, v = 1 and u is a solution of (34).

The third member of the PIII hierarchy
The third member of PIII hierarchy (1) reads
uxxx = 2(4uv −K1)uxx + 6vu2x + (4uvx − 30u2v2 + 6u2 + 12K1uv − x)ux
+ 2u2vxx + 20u4v3 − 12K1u3v2
− 12u4v + 4K1u3 + 2xu2v − (γ1 + 1)u+ 1,
vxxx = −2(4uv −K1)vxx − 6uv2x + (4vux + 30u2v2 − 6u2 − 8K1uv + x)vx
+ 2(v2 − 1)(uxx + 10u3v2 − 6K1u2v − 2u3 + xu) + γ1v − γ2.
(41)Equation (41) can be obtained as the compati-bility condition of the following linear system ofequations
∂Φ
∂λ= A(λ)Φ(λ),
∂Φ
∂x= B(λ)Φ(λ), (42)

where B = B0λ+B1 and A =4∑
j=0
Ajλ2−j, with
B0 = 12σ3, B1 =
(0 uw
−1w [vx + u(v2 − 1)] 0
),
A0 = 12σ3, A4 =
(v w
−1w (v2 − 1) −v
),
Aj =
(aj bjcj −aj
), j = 1,2,3.
(43)

Direct Problem
Solution about λ =∞
The solution Φ(λ) of (42) in the neighborhood
of the irregular singular point λ = ∞ has the
formal expansion
Φ∞ = Φ∞λD∞eQ∞(λ) = (I+φ∞1λ−1+. . . )λD∞eQ∞(λ),
(44)
where
D∞ = 12γ1σ3,
Q∞(λ) = 16(λ3 + 3K1λ
2 + 3xλ)σ3,
[A0, φ∞1] +A1 = K1σ3.
(45)

The actual asymptotic behavior of Φ changes incertain sectors of the complex λ-plane. Thesesectors are determined by
Re1
6(λ3 + 3K1λ
2 + 3xλ) = 0;
thus for large λ the sectors are asymptotic tothe raysargλ = π
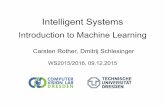
6(2j−3), j = 1,2, . . . ,6. Let Φ∞,j(λ), j =1, · · · ,6 be solutions of (42) such that det Φ∞,j(λ) =1 and Φ∞,j(λ) ∼ Φ∞ as |λ| → ∞ in the sectorS∞,j : π
6(2j − 3) ≤ argλ < π6(2j − 1) (see Figure
1). Then the solutions Φ∞,j(λ) are related bythe Stokes matrices, G∞,j, as follows
Φ∞,j+1(λ) = Φ∞,j(λ)G∞,j, j = 1,2, · · · ,5Φ∞,1(λ) = Φ∞,6(λe2πi)G∞,6e−2πiD∞,
(46)

where
G∞,2j−1 =
(1 a2j−10 1
),
G∞,2j =
(1 0a2j 1
), j = 1,2,3.
(47)
Solution about λ = 0
The solution Φ(λ) of (42) in the neighborhood
of the irregular singular point λ = 0 has the
formal expansion
Φ0 = P Φ0λD0eQ0(λ) = P (I+φ01λ
−1+. . . )λD0eQ0(λ),
(48)

where
P =
(wρ1 wρ2
−(v − 1)ρ1 −(v + 1)ρ2
),
D0 = 12γ2σ3, Q0(λ) = −λσ3.
(49)
The actual asymptotic behavior of Φ changes in
certain sectors of the complex λ-plane. These
sectors are determined by Re(−λ) = 0; thus the
sectors are asymptotic to the rays argλ = π2(2j−
3), j = 1,2. Let Φ0,j(λ), j = 1,2, be solutions of
(42) such that det Φ0,j(λ) = 1 and Φ0,j(λ) ∼ Φ0
as |λ| → 0 in the sector S0j : π
2(2j − 3) ≤ argλ <π2(2j−1). Then the solutions Φ0,j(λ) are related

by the Stokes matrices, G0,j, as follows
Φ0,2(λ) = Φ0,1(λ)G0,1,
Φ0,1(λ) = Φ0,2(λe2πi)G0,2e−2πiD0,
(50)
where
G0,1 =
(1 b10 1
), G0,2 =
(1 0b2 1
). (51)
Monodromy Data
The relation between Φ0(λ) and Φ∞(λ) is given
by
Φ∞(λ) = Φ0(λ)E, (52)

where
E =
(c1 c2c3 c4
), det(E) = 1. (53)
The monodromy data a1, a2, a3, a4, a5, a6, b1, b2, c1, c2, c3, c4satisfies the consistency condition
E−1G0,1G0,2e−2πiD0E =
6∏j=1
G∞,je−2πiD∞. (54)
Schlesinger Transformations
Let Φ(λ) be solution of (42) with parameters
γ1, γ2 and let Φ(λ) be solution of (42) with
parameters γ1, γ2. We consider transformation
Φ(λ) = R(λ)Φ(λ) (55)

such that Φ(λ) and Φ(λ) have the same mon-
odromy data. Let γ1 = γ1 + n, γ2 = γ2 + m.
Then (21) is invariant if n±m ∈ 2Z.
All possible Schlesinger transformations admit-
ted by equation (6) may be generated by the
following transformationsγ1 = γ1 + 1γ2 = γ2 + 1
,
R(1)(λ) =
(1 00 0
)λ1/2 +
(u(v − 1) uw
v−1w 1
)λ−1/2,
(56)

γ1 = γ1 − 1γ2 = γ2 + 1
,
R(2)(λ) =
(0 00 1
)λ1/2 +
(1 w
v−1r1w
r1v−1
)λ−1/2,
(57)γ1 = γ1 + 1γ2 = γ2 − 1
,
R(3)(λ) =
(1 00 0
)λ1/2 +
(u(v + 1) uw
v+1w 1
)λ−1/2,
(58)

γ1 = γ1 − 1γ2 = γ2 − 1
,
R(4)(λ) =
(0 00 1
)λ1/2 +
(1 w
v+1r1w
r1v+1
)λ−1/2,
(59)
where r1 = vx + u(v2 − 1).

Backlund Transformations
The linear equation (42.a) is transformed under
the Schlesinger transformations defined by the
transformation matrices R(j), j = 1,2,3,4 as
follows:
∂Φ
∂λ= A(λ)Φ(λ),
A(λ) = [R(j)(λ)A(λ) +∂
∂λR(j)(λ)]R−1
(j)(λ).
(60)
Using (60.b) we can derive the Backlund trans-
formations between solutions u(x) and v(x) of
(41), with parameters γ1 and γ2, and solutions
u(x) and v(x) of (41), with parameters γ1 and

γ2. The Backlund transformations correspond-ing to the Schlesinger transformations R(j), j =1,2,3,4 may be listed as follows:
R(1) : v = 1 + uΩ3,
u =−[ux − u2(v + 1)]
u[uΩ3 + 2],
γ1 = γ1 + 1, γ2 = γ2 + 1,
(61)
R(2) : v = −1 +[vx + u(v2 − 1)]Ω3
(v − 1)2,
u =v − 1
Ω3,
γ1 = γ1 − 1, γ2 = γ2 + 1,
(62)

R(3) : v = −1 + uΓ3,
u =ux − u(v + 1)
u[2− uΓ3],
γ1 = γ1 + 1, γ2 = γ2 − 1,
(63)
R(4) : v = 1 +[vx + u(v2 − 1)]Γ3
(v + 1)2,
u =(v + 1)
Γ3,
γ1 = γ1 − 1, γ2 = γ2 − 1,
(64)
where
Ω3 = 2(v − 1)a3 − (v − 1)2b3w
+ wc3

Γ3 = 2(v + 1)a3 − (v + 1)2b3w
+ wc3

Special Solutions
The Backlund transformation (27) breaks down
when v = 1 and γ2 = γ1. Substituting these
values into (5) we obtain
uxxx = 2(4u− k1)uxx + 6u3 − (24u2 − 12u+ x)ux+ 8u4 − 8K1u
3 + 2xu2 − (γ1 + 1)u+ 1.(65)

Thank you for your attention