Rotation of Rigid Object - University of...
6
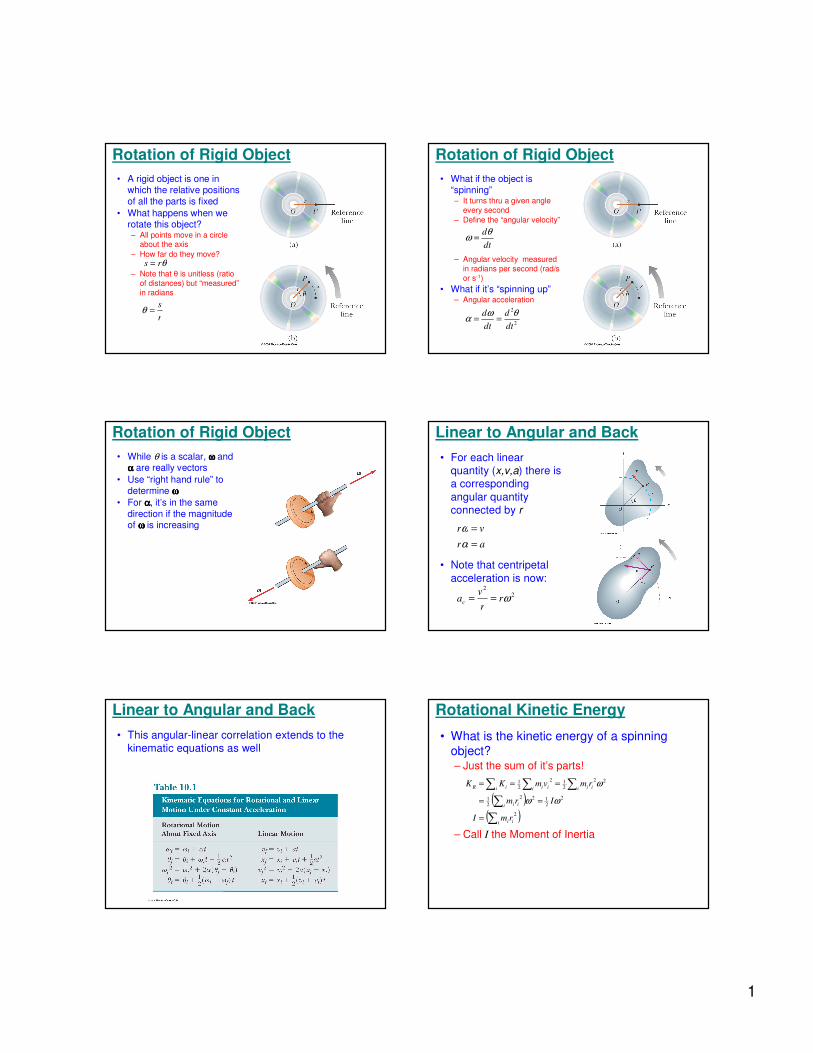
1 Rotation of Rigid Object • A rigid object is one in which the relative positions of all the parts is fixed • What happens when we rotate this object? – All points move in a circle about the axis – How far do they move? – Note that θ is unitless (ratio of distances) but “measured” in radians θ r s = r s = θ Rotation of Rigid Object • What if the object is “spinning” – It turns thru a given angle every second – Define the “angular velocity” – Angular velocity measured in radians per second (rad/s or s -1 ) • What if it’s “spinning up” – Angular acceleration dt dθ ω = 2 2 dt d dt d θ ω α = = Rotation of Rigid Object • While θ is a scalar, ω and α are really vectors • Use “right hand rule” to determine ω • For α, it’s in the same direction if the magnitude of ω is increasing Linear to Angular and Back • For each linear quantity (x,v,a) there is a corresponding angular quantity connected by r • Note that centripetal acceleration is now: a r v r = = α ω 2 2 ω r r v a c = = Linear to Angular and Back • This angular-linear correlation extends to the kinematic equations as well Rotational Kinetic Energy • What is the kinetic energy of a spinning object? – Just the sum of it’s parts! – Call I the Moment of Inertia ( ) ( ) 2 2 2 1 2 2 2 1 2 2 2 1 2 2 1 i i i i i i i i i i i i i i R r m I I r m r m v m K K ∑ ∑ ∑ ∑ ∑ = = = = = = ω ω ω
Transcript of Rotation of Rigid Object - University of...
1
Rotation of Rigid Object
• A rigid object is one in which the relative positions
of all the parts is fixed
• What happens when we rotate this object?– All points move in a circle
about the axis
– How far do they move?
– Note that θ is unitless (ratio
of distances) but “measured”
in radians
θrs =
r
s=θ
Rotation of Rigid Object
• What if the object is “spinning”– It turns thru a given angle
every second
– Define the “angular velocity”
– Angular velocity measured
in radians per second (rad/s
or s-1)
• What if it’s “spinning up”– Angular acceleration
dt
dθω =
2
2
dt
d
dt
d θωα ==
Rotation of Rigid Object
• While θ is a scalar, ωωωω and αααα are really vectors
• Use “right hand rule” to
determine ωωωω
• For αααα, it’s in the same
direction if the magnitude of ωωωω is increasing
Linear to Angular and Back
• For each linear
quantity (x,v,a) there is
a corresponding
angular quantity
connected by r
• Note that centripetal
acceleration is now:
ar
vr
=
=
α
ω
22
ωrr
vac ==
Linear to Angular and Back
• This angular-linear correlation extends to the
kinematic equations as well
Rotational Kinetic Energy
• What is the kinetic energy of a spinning object?– Just the sum of it’s parts!
– Call I the Moment of Inertia
( )( )2
2
2122
21
22
212
21
ii i
ii i
ii iii ii iR
rmI
Irm
rmvmKK
∑∑
∑∑∑
=
==
===
ωω
ω

2
Rotational Kinetic Energy
• What is the kinetic energy of a rolling object?
– Note that for a given energy, a larger I gives a
smaller v.• Hoops on a ramp go slower than disks
( ) 2
21
2
212
21
roll
2 vM
MvIKKK
R
I
CMR
+=
+=+= ω
Rotational Kinetic Energy
• What is the kinetic energy of a spinning object?– Just the sum of it’s parts!
( )( )2
2
2122
21
22
212
21
ii i
ii i
ii iii ii iR
rmI
Irm
rmvmKK
∑∑
∑∑∑
=
==
===
ωω
ω
If M >> m
Moment of Inertia
• What is the moment of inertia of an extended object– Break it up into little pieces
∫
∫
∑
=
=
∆=→∆
V
V
i iim
dVrr
dmr
mrIi
)(
lim
2
2
2
0
ρ
Moments of Inertia
• Moment of inertia of a
hoop or a thin cylinder– All the mass is at the
same R!
2
2
2
MR
dmR
dmrI
V
V
=
=
=
∫
∫
Moments of Inertia
• Moment of inertia of a
disk or solid cylinder– Consider ring at r, with
volume 2πrLdr
( )
( )2
21
22
21
4
21
0
4
41
0
3
0
2
22
2
22
MR
RLR
LRrL
drrLrLdrr
dVrdmrI
R
RR
VV
=
=
==
==
==
∫∫
∫∫
ρπ
πρπρ
πρπρ
ρ

3
Moments of Inertia
• Moment of inertia of a
thin rod about CM
( ) ( )[ ]( )
2
121
2
1213
12
3
2
3
23
3
31
22
2
2
2
2
ML
LLL
x
dxxdmrI
LL
V
L
L
L
L
=
==
−==
==
−
−
−∫∫
λ
λ
λ
λ
λ
Moments of Inertia
Moments of Inertia
• What about an
arbitrary axis?– Use “Parallel Axis
Theorem”
I = ICM + MD2
– Moment of inertia about
any axis is just moment of inertia about center of mass plus moment of inertia of “CM” about
the axis
Moments of Inertia
• What about an
arbitrary axis?– “Parallel Axis Theorem”
( )
( ) ( )[ ]( )
( ) ( )
( )
CM
2
CMCM
222
CM
2
CM
2
CM
2
CM
2
CM
2
CM
2
CM
2
CM
222
2
22
IMD
dmyyxx
dmyxdmyx
dmyyyyxxxx
dmyyxx
dmyxdmrI
+=
′+′+
′+′++=
′+′++′+′+=
′++′+=
+==
∫
∫∫
∫
∫
∫∫
Torque
• If angular acceleration
(α) is analogous to acceleration (a), what
is analogous to force
(F)?– Since α = rac, use
τ = rFc =rF sinφ– Call it “Torque”
(like α it too is a vector)

4
Torque and Angular Acceleration
• Consider a particle at
position r– What are the
kimematics?
• Analogous to F=ma
(linear) we have τ=Iα
(angular)
( )
α
α
α
τ
I
mr
rrm
rmarF tt
=
=
=
==
2
Torque and Angular Acceleration
• What about for
extended object?
– Net torque gives rise to angular acceleration
α
α
ατ
I
mr
mr
i i
i iii i
=
=
=
∑∑∑
2
2
Work and Power
• Work and power for a rotating object
( )22
21
21
2
sin
ab
b
adt
db
adtd
b
a
b
a
b
a
I
dtIdtI
dtIdtPdtW
dt
d
dt
dWP
d
rdF
FdsFdxdW
ωω
ω
αωτω
τωθτ
θτ
θφ
ωω
−=
==
===
===
=
⋅=
==
∫∫
∫∫∫
Example: Trapdoor
• What is acceleration of
tip when horizontal?
• What is speed of tip
when vertical?
ggLa
L
gMgL
MLI
>==
=
==
23
tip
2 2
3
2
3
α
τα
( )
gLLv
MLI
MgUK
L
g
L
3 ,3
22
31
212
21
2horizvert
===
==
==
ωω
ωω
Rolling Motion
• For a rolling object the
point in contact with
the surface in
momentarily stationary– Thus, center (also CM)
moves thru a distance s=rθ, at a velocity v=rω
– Top moves at speed 2vCM
• Kinetic energy is
rotation plus
translation2
CM212
CM21 MvIK += ω

5
T, a = ?
∞→?
M
∞→?
I
0?→M
0?
→I
TTTT === 321

6










![Efficiency of Wave-Driven Rigid Body Rotation Toroidal ... · arXiv:1611.04166v1 [physics.plasm-ph] 13 Nov 2016 Efficiency of Wave-Driven Rigid Body Rotation Toroidal Confinement](https://static.fdocuments.us/doc/165x107/5b99319309d3f26e678b6bbf/eciency-of-wave-driven-rigid-body-rotation-toroidal-arxiv161104166v1.jpg)







