Robust Stabilization of Multiple Coupling Networked Control Systems … · 2020-03-05 · Robust...
9
Robust Stabilization of Multiple Coupling Networked Control Systems via Jump Linear System Approach YU Mei 1 , ZHANG Weiliang 1 , WANG Haixiao 1 1. School of Control and Computer Engineering, North China Electric Power University, Beijing, 102206, P. R. China. E-mail: [email protected] Abstract: Robust stabilization of multiple networked control systems (NCSs) is addressed in this paper, where the states of the NCSs are coupled with each other and they exchange information over a shared communication network. Only one subsystem is assumed to access the network to transmit part of its state information at a time. We model such coupling NCSs with multiple packet transmission and packet dropout as jump linear systems. A sufficient condition on robust stabilization of the NCSs with norm-bounded parameter uncertainties is derived in terms of linear matrix inequalities (LMIs). Similarly, a sufficient condition on the existence of non-fragile controller is derived for the NCSs with parameter uncertainties as well. Constant stabilizing state feedback controllers can then be constructed by using the feasible solutions of some LMIs. Numerical examples are given to illustrate the feasibility and effectiveness of the proposed approach. Key Words: Networked control systems, multiple packet transmission, data packet dropout, robust stabilization, LMIs. 1 Introduction Networked control systems (NCSs) are feedback con- trol systems with a shared band-limited digital communi- cation network used for communication between spatially distributed systems, such as plants, sensors, actuators, and controllers. The prominent feature of NCSs is that the infor- mation is exchanged among control system components us- ing a network. Compared with the traditional point-to-point wiring, the primary advantages of NCSs are that they can reduce system wiring, ease of system diagnosis and main- tenance, and increase system agility. NCSs have been ap- plied in many fields, such as mobile sensor networks, re- mote surgery, automated highway systems and unmanned aerial vehicles [12]. However, the use of the shared network also introduces new challenges, such as bandwidth-limited channel [13], network-induced delay [15], packet dropout [14], multiple-packet transmission [15] and so on. Multi- ple packet transmission means that sensor or actuator data is divided into different packets and is transmitted in separate network channels, which may not arrive at the controller and plant simultaneously. One reason for multiple-packet trans- mission is that sensors and actuators in an NCS are often distributed over a large physical area, and it is impossible to put all the data into one packet. The other reason is that net- works can only carry limited information in a single packet due to packet size constraints [11]. Thus, large amounts of data may be broken into multiple packets to be transmitted. In many practical control systems, the communications among the devices is through one limited communication channel. The problem of stabilization with finite commu- nication bandwidth was introduced by [13] and further pur- sued by [16, 17]. [13] introduced state estimation problems to solve the finite communication capacity constraints of the This work is supported by the Fundamental Research Funds for the Central Universities (2015ZD13) and the National Natural Science Founda- tion of China(No.61473337). NCSs. [16] proposed a dwell-time switching method to re- duce the data rate of the network. [17] made use of a model of the plant to reduce the network usage. Stabilization of NCSs with multiple packet transmissions over token-passing bus networks was considered in Yu et al [18, 19], where sufficient conditions on stabilization of the NCSs were ob- tained by modeling the NCSs as periodically switched sys- tems. They did not consider multiple coupling NCSs. [2] further studied stabilization of multiple coupling NCSs us- ing switched system approach, which assumed that only one subsystem could access the network to transmit all of it’s present state information at a time. Jump linear system approach has been proved as an efficient method to study stabilization of NCSs. In [20], the NCSs with bounded packet dropout were modeled as Markov jump linear sys- tems (MJLSs) and the transition probabilities of MJLSs are partly known. [21] studied an NCS with stochastic network- induced delay and data packet dropout and the NCS was modeled as a discrete time MJLS with two operation modes. In [22], the NCS with stochastic packet loss was modeled as a stochastic packet loss model with Markov jump param- eters. The control law designed by the author could adapt to the occurrence of dropouts by using time varying control gains. However, these papers did not consider the problem of multiple packet transmission. As we all know, uncertainty is ubiquitous in control sys- tems. It inevitably exists in system model due to exogenous disturbance, measurement errors, the complexity of system itself and so on. This may lead to deterioration of the sys- tem performance, even instability of the NCSs. Meanwhile, because of the conversion error of D/A or A/D, the change of controller parameters may also happen to some extent in the actual control systems, which can also result in deteriora- tion of controller performance. Those require the controller to be non-fragile to guarantee stability of the system when the parameters of the controller change in the allowed band. ILUR TRANSACTIONS ON SCIENCE AND ENGINEERING, Volume 2016 (2016), Article ID 20160101 1
Transcript of Robust Stabilization of Multiple Coupling Networked Control Systems … · 2020-03-05 · Robust...

Robust Stabilization of Multiple Coupling Networked ControlSystems via Jump Linear System Approach
YU Mei1, ZHANG Weiliang1, WANG Haixiao1
1. School of Control and Computer Engineering, North China Electric Power University, Beijing, 102206, P. R. China.E-mail: [email protected]
Abstract: Robust stabilization of multiple networked control systems (NCSs) is addressed in this paper, where the states of theNCSs are coupled with each other and they exchange information over a shared communication network. Only one subsystemis assumed to access the network to transmit part of its state information at a time. We model such coupling NCSs with multiplepacket transmission and packet dropout as jump linear systems. A sufficient condition on robust stabilization of the NCSs withnorm-bounded parameter uncertainties is derived in terms of linear matrix inequalities (LMIs). Similarly, a sufficient conditionon the existence of non-fragile controller is derived for the NCSs with parameter uncertainties as well. Constant stabilizing statefeedback controllers can then be constructed by using the feasible solutions of some LMIs. Numerical examples are given toillustrate the feasibility and effectiveness of the proposed approach.
Key Words: Networked control systems, multiple packet transmission, data packet dropout, robust stabilization, LMIs.
1 Introduction
Networked control systems (NCSs) are feedback con-trol systems with a shared band-limited digital communi-cation network used for communication between spatiallydistributed systems, such as plants, sensors, actuators, andcontrollers. The prominent feature of NCSs is that the infor-mation is exchanged among control system components us-ing a network. Compared with the traditional point-to-pointwiring, the primary advantages of NCSs are that they canreduce system wiring, ease of system diagnosis and main-tenance, and increase system agility. NCSs have been ap-plied in many fields, such as mobile sensor networks, re-mote surgery, automated highway systems and unmannedaerial vehicles [12]. However, the use of the shared networkalso introduces new challenges, such as bandwidth-limitedchannel [13], network-induced delay [15], packet dropout[14], multiple-packet transmission [15] and so on. Multi-ple packet transmission means that sensor or actuator data isdivided into different packets and is transmitted in separatenetwork channels, which may not arrive at the controller andplant simultaneously. One reason for multiple-packet trans-mission is that sensors and actuators in an NCS are oftendistributed over a large physical area, and it is impossible toput all the data into one packet. The other reason is that net-works can only carry limited information in a single packetdue to packet size constraints [11]. Thus, large amounts ofdata may be broken into multiple packets to be transmitted.
In many practical control systems, the communicationsamong the devices is through one limited communicationchannel. The problem of stabilization with finite commu-nication bandwidth was introduced by [13] and further pur-sued by [16, 17]. [13] introduced state estimation problemsto solve the finite communication capacity constraints of the
This work is supported by the Fundamental Research Funds for theCentral Universities (2015ZD13) and the National Natural Science Founda-tion of China(No.61473337).
NCSs. [16] proposed a dwell-time switching method to re-duce the data rate of the network. [17] made use of a modelof the plant to reduce the network usage. Stabilization ofNCSs with multiple packet transmissions over token-passingbus networks was considered in Yu et al [18, 19], wheresufficient conditions on stabilization of the NCSs were ob-tained by modeling the NCSs as periodically switched sys-tems. They did not consider multiple coupling NCSs. [2]further studied stabilization of multiple coupling NCSs us-ing switched system approach, which assumed that only onesubsystem could access the network to transmit all of it’spresent state information at a time. Jump linear systemapproach has been proved as an efficient method to studystabilization of NCSs. In [20], the NCSs with boundedpacket dropout were modeled as Markov jump linear sys-tems (MJLSs) and the transition probabilities of MJLSs arepartly known. [21] studied an NCS with stochastic network-induced delay and data packet dropout and the NCS wasmodeled as a discrete time MJLS with two operation modes.In [22], the NCS with stochastic packet loss was modeledas a stochastic packet loss model with Markov jump param-eters. The control law designed by the author could adaptto the occurrence of dropouts by using time varying controlgains. However, these papers did not consider the problemof multiple packet transmission.
As we all know, uncertainty is ubiquitous in control sys-tems. It inevitably exists in system model due to exogenousdisturbance, measurement errors, the complexity of systemitself and so on. This may lead to deterioration of the sys-tem performance, even instability of the NCSs. Meanwhile,because of the conversion error of D/A or A/D, the changeof controller parameters may also happen to some extent inthe actual control systems, which can also result in deteriora-tion of controller performance. Those require the controllerto be non-fragile to guarantee stability of the system whenthe parameters of the controller change in the allowed band.
ILUR TRANSACTIONS ON SCIENCE AND ENGINEERING, Volume 2016 (2016), Article ID 20160101 1

Therefore, the research of non-fragile control is also a veryimportant issue. [23] investigated a class of NCSs with time-varying norm-bounded parameter uncertainties with both theproblem of multiple-packet transmission and random packetdropouts. Robust H∞ controller design was given in theform of LMI. [24] considered the NCSs with parameter un-certainties, time-delay and data packet dropout. The NCSswere modeled as a class of uncertain continuous-time sys-tems with time-varying input delay. But the authors did notfurther study the multiple coupling NCSs. In [1], the au-thor presented a methodology for plants with distributed in-terconnected units. An integrated control and communica-tion strategy was proposed to ensure the closed-loop stabil-ity and performance for the plants while minimizing networkutilization. In [4], the authors developed a model-based net-worked control and scheduling framework for plants with in-terconnected units and distributed control systems. [5] mod-eled multiple coupling NCSs as switched systems and alsogave the design of the controller. Although they studied mul-tiple coupling NCSs, they did not consider parameter uncer-tainties and non-fragile controller design.
Motivated by above discussions, this paper is to studyrobust stabilization of multiple coupling NCSs with theproblem of parameter uncertainties, random multiple packettransmission and packet dropout. Two kinds of uncertain-ties are considered in this paper: norm-bounded parameteruncertainties in the plant and norm-bounded parameter un-certainties in the controller. For multiple packet transmittedNCSs, they are modeled as jump linear systems. For NCSswith norm-bounded parameter uncertainties, state feedbackcontrollers can be constructed in terms of linear matrix in-equalities. Furthermore, a sufficient condition on the exis-tence of non-fragile state-feedback controllers is presentedas well.
The paper is organized as follows: section 2 models mul-tiple coupling NCSs as jump linear systems. Section 3presents robust stabilization and state feedback controller de-sign results for the NCSs with norm-bounded parameter un-certainties. Section 4 derives a sufficient condition on the ex-istence of non-fragile state-feedback controllers for multiplecoupling NCSs with norm-bounded parameter uncertainties.Section 5 constructs two numerical examples to demonstratethe efficiency and feasibility of the proposed approach. Sec-tion 6 concludes this paper.
2 System Modeling
In distributed NCSs, sensors and actuators are often dis-tributed over a large physical area, or the transmitted in-formation length may surpass the capacity of network, somultiple-packet transmission is necessary. Assumed that allthe nodes communicate via a limited bandwidth communica-tion channel, and assumed that state information of the sys-tem be split into different packets and only one packet canbe transmitted at a time. The packet transmission process isgoverned by a Markov chain with finite state. When a sensor
data (containing the state information of the NCSs) is suc-cessfully sent to the controller through the communicationlink, it will be put into a single register and will substitutethe old data. The controller reads out the content of the reg-ister and utilizes it to compute the new control input, whichwill be applied to the plant.
A class of multiple coupling NCSs with norm-boundedparameter uncertainties can be described as
x1(k + 1) = (A11 +4A11)x1(k) + (A12 +4A12)x2(k)+ · · ·+ (A1n +4A1n)xn(k) + B1u1(k),
x2(k + 1) = (A21 +4A21)x1(k) + (A22 +4A22)x2(k)+ · · ·+ (A2n +4A2n)xn(k) + B2u2(k),
...xn(k + 1) = (An1 +4An1)x1(k) + (An2 +4An2)x2(k)
+ · · ·+ (Ann +4Ann)xn(k) + Bnun(k),(1)
The control input to be designed is
ui(k) = Fixi(k), (2)
where x(k) ∈ Rn, u(k) ∈ Rp are the plant state and theplant input, respectively. x(k) is the content of the register.Fi is the feedback gain to be designed. Aij , Bi are knownreal constant matrices with appropriate dimensions. ∆Aij
characterizes the uncertainties in the system and satisfies thefollowing assumption
∆Aij = EiΓ1(t)Gij , i, j = 1, 2, · · · , d,
where Ei, and Gij are known real constant matrices of ap-propriate dimensions which characterize the structure of theuncertainty. Γ1(t) is unknown real time-varying matrix withLebesgue measurable elements bounded by
Γ1(t)T Γ1(t) ≤ I,∀t.
Suppose the state is split into d packetsx(k) = [XT
1 (k), · · · , XTd (k)], where Xi(k) =
[xri−1+1(k), · · · , xri(k)]T .The controller will use the obsolete state informationx(k) = [XT
1 (k), · · · , XTd (k)] if there is no new data to
update, where
Xi(k) =
Xi(k), if the packet containing Xi(k)is transmitted successfully;
Xi(k − 1), otherwise.
The packet transmission sequence of sensor nodes is non-deterministic under dynamic scheduling strategy. There-fore it’s reasonable to describe the stochastic packet trans-mission process as a Markov chain. The states of Markovchain expressed by ρk are utilized to model the stochasticpacket transmission process, which take values in a finite setρk = 0, 1, · · · , d, where
ρk =
i, the ith packet’s state information is transmittedsuccessfully, i ∈ 1, · · · , d ;
0, otherwise.
ILUR TRANSACTIONS ON SCIENCE AND ENGINEERING, Volume 2016 (2016), Article ID 20160101 2

The Markov chain with a transition probability matrixP = [Pmn] is given by
Pmn = Probρk+1 = n|ρk = m, Pmn ≥ 0,d∑
n=0Pmn = 1, m, n ∈ 0,1, · · · , d.
Define a diagonal matrix
πρk= diagδρk,1, δρk,2, · · · , δρk,d,
where
δρk,j =
Ir×r, ρk = j,
0, ρk 6= j (j = 0, 1 ,· · · , d).
Then
xi(k) = πρkxi(k) + (I − πρk
)xi(k − 1),i = 1, · · · , n, k = 1, 2, · · · .
Define
Z(k) =[
xT1 (k + 1) xT
1 (k) · · · xTn (k + 1) xT
n (k)]T
.
From above analysis , we know the closed-loop system canbe equivalently described as:
Z(k + 1) = ΦρkZ(k), (3)
where
Φρk=
T1¯A12
¯A13 · · · ¯A1n¯A21 T2
¯A23 · · · ¯A2n¯A31
¯A32 T3 · · · ¯A3n
......
.... . .
...¯An1
¯An2¯An3 · · · Tn
,
Ti =[
Aii + ∆Aii + BiFiπρkBiFi(I − πρk
)πρk
I − πρk
],
¯Aij =[
Aij + ∆Aij 00 0
].
Now, we model the multiple coupling NCSs (1)-(2) as ageneral jump linear system (3) with the Markov jump pa-rameter ρk, whose stability guarantees that of the originalsystem. The jumping subsystems are
Φρk∈ Φ0,Φ1, · · · ,Φd.
Remark 1. In our NCSs model, we also consider the case ofpacket dropout. Sensor datum containing the state informa-tion will be used by the controller when they are successfullytransmitted. When a sensor fails to access the medium, thevalues stored in the register can’t update in time and the con-troller will use the obsolete values in the register to computecontrol inputs. In the above model, the case of data packetdropout is represented by Φ0.
3 Stabilization of Multiple NCSs with Norm-Bounded Parameter Uncertainties
Based on the above the modeling process, we know thatoriginal NCSs (1)-(2) are stable if system (3) is stable. Sowe only need to prove that system (3) is stable. In the fol-lowing section, we will first study stabilization of the sys-tem (3) without norm-bounded parameter uncertainties. Theclosed-loop system of the multiple coupling NCSs withoutuncertainties can be described as:
Z(k + 1) = ΨρkZ(k), (4)
where
Ψρk=
T1 A12 A13 · · · A1n
A21 T2 A23 · · · A2n
A31 A32 T3 · · · A3n
......
.... . .
...An1 An2 An3 · · · Tn
,
Ti =[
Aii + BiFiπρkBiFi(I − πρk
)πρk
I − πρk
],
Aij =[
Aij 00 0
].
Before proceeding, it’s necessary to introduce the defini-tion of mean square (MS) stable for the discrete time Markovjump linear systems.
Definition 1. [6] The system (4) is MS stable, if for all ini-tial state (x0, θ0) such that limk→∞Eb‖x(k)‖2c = 0 holds,where E is the statistical expectation operator.
The following lemma will play a key rule to give a suffi-cient condition on MS stable of the NCS (4).
Lemma 1. Schur Complement Lemma [7] Suppose thesymmetric matrix S = ST ∈ R(n+m)×(n+m) is partitionedas
S =[
S11 S12
ST12 S22
],
where S11 ∈ Rn×n, S12 ∈ Rn×m, S22 ∈ Rm×m, then thefollowing three conditions are equivalent:
(i)S < 0;(ii)S11 < 0, S22 − ST
12S−111 S12 < 0;
(iii)S22 < 0, S11 − S12S−122 ST
12 < 0.
Lemma 2. [8] Let M , N , Λ be real matrices of suitabledimensions with ΛT Λ ≤ I , then the following inequalityholds for any positive scalar ε > 0:
MΛN + NT ΛT MT ≤ εMMT + ε−1NT N
Below, we present a sufficient condition on MS stable ofthe system (4), which has been proved in [10].
ILUR TRANSACTIONS ON SCIENCE AND ENGINEERING, Volume 2016 (2016), Article ID 20160101 3

Lemma 3. [10] The jump linear system (4) is said to beMS stable, if there exist symmetric positive definite matricesQρk
(ρk = 0, 1, · · · , d), satisfying the following condition:
ΨTρk
(d∑
n=0
PρknQn)Ψρk< Qρk
. (5)
With a freedom matrix S introduced, we will develop newsufficient conditions on the stabilization of the NCSs. Thefollowing lemma is a different form of Theorem 1 in [9].
Lemma 4. If there exist symmetric positive definite matricesQρk
(ρk = 0, · · · , d), matrices S, Ki, Yi satisfying
SBi = BiKi (6)
and the following LMI:
Qρk
√pρk0W T
ρk
√pρk1W T
ρk· · · √
pρkdW Tρk
∗ S + ST − Q0 0 · · · 0
∗ ∗ S + ST − Q1 · · · 0...
......
. . ....
∗ ∗ ∗ · · · S + ST − Qd
> 0,
(7)where
Wρk=
SA11 + B1Y1πρkB1Y1(I − πρk
) SA12Sπρk
S(I − πρk) 0
SA21 0 SA22 + Y2F2πρk0 0 Sπρk
.
.
.
.
.
.
.
.
.SAn1 0 SAn2
0 0 0
(8)
0 SA13 0 · · · SA1n 00 0 0 · · · 0 0
B2Y2(I − πρk) SA23 0 · · · SA2n 0
S(I − πρk) 0 0 · · · 0 0
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.0 SAn3 0 · · · SAnn + BnYnπρk
BnYn(I − πρk)
0 0 0 · · · SπρkS(I − πρk
)
,
Qρk =
Qρk 0 · · · 0
0 Qρk · · · 0...
.... . .
...0 0 · · · Qρk
, S =
S 0 · · · 0
0 S · · · 0...
.... . .
...0 0 · · · S
,
then the system (4) is MS stable with the state feedback gain
Fi = K−1i Yi i = 1, 2, · · · , d. (9)
Proof. With a freedom matrix S introduced, (5) is equiva-lent to the following inequality
Qρk√pρk0(SΨT
ρk)T √pρk1(SΨT
ρk)T · · · √
pρkd(SΨTρk
)T
∗ S + ST − Q0 0 · · · 0∗ ∗ S + ST − Q1 · · · 0
.
.
.
.
.
.
.
.
.. . .
.
.
.∗ ∗ ∗ · · · S + ST − Qd
> 0.
(10)
This can be easily verified by pre- and post-multiplying (10)with [I −√pρk0ΨT
ρk· · · −√pρkdΨT
ρk] and its transpose
respectively.It can be easily seen that
SΨρk= S
T1 A12 A13 · · · A1n
A21 T2 A23 · · · A2n
A31 A32 T3 · · · A3n
......
.... . .
...An1 An2 An3 · · · Tn
=
SA11 + SB1F1πρkSB1F1(I − πρk
) SA12Sπρk
S(I − πρk) 0
SA21 0 SA22 + SB2F2πρk0 0 Sπρk
.
.
.
.
.
.
.
.
.SAn1 0 SAn2
0 0 0
0 SA13 0 · · · SA1n 00 0 0 · · · 0 0
SB2F2(I − πρk) SA23 0 · · · SA2n 0
S(I − πρk) 0 0 · · · 0 0
.
.
.
.
.
.
.
.
.. . .
.
.
.
.
.
.0 SAn3 0 · · · SAnn + SBnFnπρk
SBnFn(I − πρk)
0 0 0 · · · SπρkS(I − πρk
)
.
Using (6), then we can get
SΨρk=
SA11 + B1K1F1πρkB1K1F1(I − πρk
) SA12Sπρk
S(I − πρk) 0
SA21 0 SA22 + B2K2F2πρk0 0 Sπρk
.
.
.
.
.
.
.
.
.SAn1 0 SAn2
0 0 0
0 SA13 0 · · · SA1n 00 0 0 · · · 0 0
B2K2F2(I − πρk) SA23 0 · · · SA2n 0
S(I − πρk) 0 0 · · · 0 0
.
.
.
.
.
.
.
.
.. . .
.
.
.
.
.
.0 SAn3 0 · · · SAnn + BnKnFnπρk
BnKnFn(I − πρk)
0 0 0 · · · SπρkS(I − πρk
)
.
Let Yi = KiFi, Wρk= SΨρk
, (10) is equivalent to (7). IfLMI (7) is feasible, then the explicit expression of the de-sired feedback gain is given by (9).
Then we will give a sufficient condition on robust MS sta-bilization of the NCSs (1)-(2) in the following.
Theorem 1. If there exist symmetric positive definite matri-ces Qρk
(ρk = 0, 1, · · · , d), matrices S, Ki, Yi and a positivescalar ε satisfying:
SBi = BiKi
and the following LMI:−Ω1
¯M ¯NT
¯MT −Ω2 0¯N 0 −Ω3
< 0, (11)
where
Ω1 =
Qρk
√pρk0W T
ρk
√pρk1W T
ρk· · · √
pρkdW Tρk
∗ S + ST − Q0 0 · · · 0
∗ ∗ S + ST − Q1 · · · 0...
......
. . ....
∗ ∗ ∗ · · · S + ST − Qd
(12)
Ω2 = Ω3 =
εI 0 · · · 00 εI · · · 0...
.... . .
...0 0 · · · εI
, (13)
¯M = εM, M =
M 0 · · · 00 0 · · · 0...
.... . .
...0 0 · · · 0
,
ILUR TRANSACTIONS ON SCIENCE AND ENGINEERING, Volume 2016 (2016), Article ID 20160101 4

M =
GT11 0 GT
12 0 · · · GT1n 0
0 0 0 0 · · · 0 0GT
21 0 GT22 0 · · · GT
2n 00 0 0 0 · · · 0 0...
......
.... . .
......
GTn1 0 GT
n2 0 · · · GTnn 0
0 0 0 0 · · · 0 0
,
¯N = N =
0 Nρk0 Nρk1 · · · Nρkd
0 0 0 · · · 0...
......
. . ....
0 0 0 · · · 0
,
Nρki =√
pρki
ET1 ST 0 0 0 · · · 0 0 0 00 0 0 0 · · · 0 0 0 00 0 ET
1 ST 0 · · · 0 0 0 00 0 0 0 · · · 0 0 0 0
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
.0 0 0 0 · · · ET
n ST 0 0 00 0 0 0 · · · 0 0 0 00 0 0 0 · · · 0 0 ET
n ST 00 0 0 0 · · · 0 0 0 0
.
Wρkis defined by (8), then the NCSs (1)-(2) are robust MS
stable with the state feedback gain
Fi = K−1i Yi, i = 1, 2, · · · , d. (14)
Proof. From the modeling process, the NCSs (1)-(2) arerobust MS stable if the system (3) is robust MS stable. ByLemma 4, the system (3) is robust MS stable if there existsymmetric positive definite matrices Qρk
(ρk = 0, 1, · · · , d),and matrix S satisfying
Qρk√pρk0(SΦρk
)T √pρk1(SΦρk)T · · · √
pρkd(SΦρk)T
∗ S + ST − Q0 ∗ · · · ∗∗ ∗ S + ST − Q1 · · · ∗...
.
.
.
.
.
.. . .
.
.
.∗ ∗ ∗ · · · S + ST − Qd
> 0,
(15)
Inequality (15) can be rewritten as
Qρk√pρk0(SΨT
ρk)T √pρk1(SΨT
ρk)T · · · √
pρkd(SΨTρk
)T
∗ S + ST − Q0 0 · · · 0∗ ∗ S + ST − Q1 · · · 0
.
.
.
.
.
.
.
.
.. . .
.
.
.∗ ∗ ∗ · · · S + ST − Qd
+
0 √pρk0ΥT √pρk1ΥT · · · √pρkdΥT
∗ 0 0 · · · 0∗ ∗ 0 · · · 0
.
.
.
.
.
.
.
.
.. . .
.
.
.∗ ∗ ∗ · · · 0
> 0,
(16)
where
Υ =
S∆A11 0 S∆A12 0 · · · S∆A1n 00 0 0 0 · · · 0 0
S∆A21 0 S∆A22 0 · · · S∆A2n 00 0 0 0 · · · 0 0...
......
.... . .
......
S∆An1 0 S∆An2 0 · · · S∆Ann 00 0 0 0 · · · 0 0
.
And thus
ΥT =
GT11 0 GT
12 0 · · · GT1n 0
0 0 0 0 · · · 0 0
GT21 0 GT
22 0 · · · GT2n 0
0 0 0 0 · · · 0 0...
......
.... . .
......
GTn1 0 GT
n2 0 · · · GTnn 0
0 0 0 0 · · · 0 0
×
Γ1(t) 0 0 · · · 0
0 Γ1(t) 0 · · · 0...
......
. . ....
0 0 0 · · · Γ1(t)
×
ET1 ST 0 0 · · · 0 0
0 0 0 0 · · · 0 0
0 0 ET1 ST 0 · · · 0 0
0 0 0 0 · · · 0 0...
......
.... . .
......
0 0 0 0 · · · ETn ST 0
0 0 0 0 · · · 0 0
.
Using (6), and let Yi = KiFi, LMI (16) is equivalent to
−Ω1 + M ¯Γ(t)N + NT ¯Γ(t)T MT < 0,
where¯Γ1(t) = diagΓ1(t), Γ1(t), · · · , Γ1(t),Γ1(t) = diagΓ1(t),Γ1(t), · · · ,Γ1(t). (17)
From lemma 2, we know LMI (16) is satisfied if there existsa positive scalar ε satisfies:
−Ω1 + εMMT + ε−1NT N < 0. (18)
By Schur Complement Lemma, we know inequality (18) isequivalent to (11). If LMI (11) is feasible, then NCSs (1)-(2)can be robustly MS stabilized with the state feedback gain
Fi = K−1i Yi.
4 Non-fragile controller design for N-subsystemswith norm-bounded parameter uncertainties
In practice, the controller implement should be able to tol-erate a certain degree of plant uncertainties as well as con-troller parameter uncertainties. In this section, the problemof robust non-fragile controller design is developed for mul-tiple coupling NCSs with norm-bounded parameter uncer-tainties based on LMI theory.
Consider the following uncertain multiple coupling NCSsx1(k + 1) = (A11 +4A11)x1(k) + (A12 +4A12)x2(k)+
· · ·+ (A1n +4A1n)xn(k) + B1u1(k),
x1(k) = πρk x1(k) + (I − πρk )x1(k − 1);
x2(k + 1) = (A21 +4A21)x1(k) + (A22 +4A22)x2(k)+
· · ·+ (A2n +4A2n)xn(k) + B2u2(k),
x2(k) = πρk x2(k) + (I − πρk )x2(k − 1);...
xn(k + 1) = (An1 +4An1)x1(k) + (An2 +4An2)x2(k)+
· · ·+ (Ann +4Ann)xn(k) + Bnun(k),
xn(k) = πρk xn(k) + (I − πρk )xn(k − 1).(19)
The control input to be designed is
ui(k) = (Fi +4Fi)xi(k) k = 1, 2, · · · , (20)
ILUR TRANSACTIONS ON SCIENCE AND ENGINEERING, Volume 2016 (2016), Article ID 20160101 5

where ∆Fi = HiΓ2(t)Ji, Hi and Ji are known real con-stant matrices of appropriate dimensions which characterizethe structure of the uncertainty, and Γ2(t) is unknown matrixfunction with Lebesgue-measurable elements which also sat-isfies Γ2(t)T Γ2(t) ≤ I,∀t. The other parameters are definedin Section 2.
Define
Z(k) =[
xT1 (k + 1) xT
1 (k) · · · xTn (k + 1) xT
n (k)]T
,
similar to Section 3, we can get the closed-loop NCS withplant uncertainties and controller uncertainties:
Z(k + 1) = ΘρkZ(k), (21)
where
Θρk=
T1¯A12
¯A13 · · · ¯A1n¯A21 T2
¯A23 · · · ¯A2n¯A31
¯A32 T3 · · · ¯A3n
......
.... . .
...¯An1
¯An2¯An3 · · · Tn
,
Ti =
[Aii + ∆Aii + Bi(Fi + ∆Fi)πρk Bi(Fi + ∆Fi)(I − πρk )
πρk I − πρk
],
¯Aij =[
Aij +4Aij 00 0
].
In the following, we will develop robust MS stabilizationof the system (21).
Theorem 2. If there exist positive symmetric matricesQρk
(ρk = 0, 1, · · · , d), matrices S, Ki, Yi, and positivescalars ε, η satisfying:
SBi = BiKi
and the following LMI:
−Ω1¯M ¯NT ¯L ¯V T
¯MT −Ω2 0 0 0¯N 0 −Ω3 0 0
¯LT 0 0 −Ω4 0¯V 0 0 0 −Ω5
< 0, (22)
where
Ω4 = Ω5 =
ηI 0 · · · 00 ηI · · · 0...
.... . .
...0 0 · · · ηI
,
¯M = εM, M =
M 0 · · · 00 0 · · · 0...
.... . .
...0 0 · · · 0
,
M =
GT11 0 GT
12 0 · · · GT1n 0
0 0 0 0 · · · 0 0GT
21 0 GT22 0 · · · GT
2n 00 0 0 0 · · · 0 0...
......
.... . .
......
GTn1 0 GT
n2 0 · · · GTnn 0
0 0 0 0 · · · 0 0
,
¯N = N =
0 Nρk0 Nρk1 · · · Nρkd
0 0 0 · · · 0...
......
. . ....
0 0 0 · · · 0
,
Nρki =
√pρki
ET1 ST 0 0 0 · · · 0 0 0 00 0 0 0 · · · 0 0 0 00 0 ET
1 ST 0 · · · 0 0 0 00 0 0 0 · · · 0 0 0 0
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
.0 0 0 0 · · · ET
n ST 0 0 00 0 0 0 · · · 0 0 0 00 0 0 0 · · · 0 0 ET
n ST 00 0 0 0 · · · 0 0 0 0
,
¯L = L, L =
L 0 · · · 00 0 · · · 0...
.... . .
...0 0 · · · 0
,
L =
πTρk
JT1 (I − πρk )T JT
1 0 0 · · ·0 0 πT
ρkJT2 (I − πρk )T JT
2 · · ·...
......
.... . .
0 0 0 0 · · ·0 0 0 0 · · ·
0 0
0 0...
...πT
ρkJT
n (I − πρk )T JTn
0 0
,
¯V = V =
0 Vρk0 · · · Vρkd
0 0 · · · 0...
.... . .
...0 0 · · · 0
,
Vρki =√
Pρki
HT1 BT
1 ST 0 0 0
0 HT1 BT
1 ST 0 0
0 0 HT2 BT
2 ST
0 0 0 HT2 BT
2 ST
......
......
0 0 0 0
0 0 0 0
,
· · · 0 0
· · · 0 0
· · · 0 0
· · · 0 0
. . ....
...· · · HT
n BTn ST 0
· · · 0 HTn BT
n ST
,
ILUR TRANSACTIONS ON SCIENCE AND ENGINEERING, Volume 2016 (2016), Article ID 20160101 6

Ω1, Ω2, Ω3 are defined by (12), (13) in theorem 1 respec-tively, then the NCSs (19)-(20) are robust MS stable with thestate feedback gain
Fi = K−1i Yi. (23)
Proof. From theorem 1, the system (21) is robustMS stable if there exist symmetric positive definite matrixQρk
(ρk = 0, 1, · · · , d) and matrix S satisfying
Qρk√pρk0(SΘρk
)T √pρk1(SΘρk)T · · · √
pρkd(SΘρk)T
∗ S + ST − Q0 0 · · · 0∗ ∗ S + ST − Q1 · · · 0
.
.
.
.
.
.
.
.
.. . .
.
.
.∗ ∗ ∗ · · · S + ST − Qd
> 0,
(24)
The inequality (24) above can be rewritten as
Qρk√pρk0(SΨT
ρk)T √pρk1(SΨT
ρk)T · · · √
pρkd(SΨTρk
)T
∗ S + ST − Q0 0 · · · 0∗ ∗ S + ST − Q1 · · · 0
.
.
.
.
.
.
.
.
.. . .
.
.
.∗ ∗ ∗ · · · S + ST − Qd
+
0 √pρk0ΛT √pρkdΛT · · · √
pρkdΛT
∗ 0 0 · · · 0∗ ∗ 0 · · · 0
.
.
.
.
.
.
.
.
.. . .
.
.
.∗ ∗ ∗ · · · 0
> 0,
(25)
where
ΛT =
GT11 0 GT
12 0 · · · GT1n 0
0 0 0 0 · · · 0 0GT
21 0 GT22 0 · · · GT
2n 00 0 0 0 · · · 0 0
.
.
.
.
.
.
.
.
.
.
.
.. . .
.
.
.
.
.
.GT
n1 0 GTn2 0 · · · GT
nn 00 0 0 0 · · · 0 0
×
Γ1(t) 0 0 · · · 00 Γ1(t) 0 · · · 0
.
.
.
.
.
.
.
.
.. . .
.
.
.0 0 0 · · · Γ1(t)
×
ET1 ST 0 0 · · · 0 00 0 0 0 · · · 0 00 0 ET
1 ST 0 · · · 0 00 0 0 0 · · · 0 0
.
.
.
.
.
.
.
.
.
.
.
.. . .
.
.
.
.
.
.0 0 0 0 · · · ET
n ST 00 0 0 0 · · · 0 0
+
πTρk
JT1 (I − πρk
)T JT1 0 0
0 0 πTρk
JT2 (I − πρk
)T JT2
.
.
.
.
.
.
.
.
.
.
.
.0 0 0 00 0 0 0· · · 0 0· · · 0 0
. . ....
.
.
.· · · πT
ρkJT
n (I − πρk)T JT
n
· · · 0 0
×
Γ2(t) 0 0 · · · 00 Γ2(t) 0 · · · 0
.
.
.
.
.
.
.
.
.. . .
.
.
.0 0 0 · · · Γ2(t)
×
HT1 BT
1 ST 0 0 0
0 HT1 BT
1 ST 0 0
0 0 HT2 BT
2 ST
0 0 0 HT2 BT
2 ST
.
.
.
.
.
.
.
.
.
.
.
.0 0 0 00 0 0 0
· · · 0 0· · · 0 0· · · 0 0· · · 0 0
. . ....
.
.
.· · · HT
n BTn ST 0
· · · 0 HTn BT
n ST
.
Using (6), and let Yi = KiFi, the LMI (25) is equivalent to
−Ω1+M ¯Γ1(t)N+NT ¯Γ1(t)T MT +L¯Γ2(t)V +V T ¯Γ2(t)T LT < 0,
(26)where
¯Γ2(t) = diagΓ2(t), Γ2(t), · · · , Γ2(t),Γ2(t) = diagΓ2(t),Γ2(t), · · · ,Γ2(t),
and ¯Γ1(t) is defined by (17) in theorem 1.From lemma 2, we know LMI (26) is satisfied if there
exist positive scalars ε , η satisfy:
−Ω1+εMMT +ε−1NT N +ηLLT +η−1V T V < 0. (27)
By Schur Complement Lemma, we know inequality (27) isequivalent to (22). If the LMI (22) is feasible, then the NCSs(19)-(20) can be robust MS stabilized with the state feedbackgain
Fi = K−1i Yi.
5 Simulation examples
In this section, two numerical examples are given todemonstrate the effectiveness of the proposed method.
Example 1. We consider the case that the multiple couplingNCSs only contain two subsystems. The state informationof the each subsystem is split into two packets. Both of thetwo subsystems have time-varying norm-bounded parameteruncertainties.
x1(k + 1) = (A11 + E1Γ1(t)G11)x1(k) + (A12 + E1Γ1(t)G12)x2(k)
+B1F1x1(k),
x2(k + 1) = (A21 + E2Γ1(t)G21)x1(k) + (A22 + E2Γ1(t)G22)x2(k)
+B2F2x2(k),(28)
where
A11 =[
0.2 00.4 0.3
], A12 =
[0.2 0.010 0.2
],
A21 =[
0.05 0.10.1 0.01
], A22 =
[0.1 0.050.2 0.2
],
(29)
B1 =[
0.40.5
], B2 =
[0.080.02
], (30)
E1 =[
0.1−0.08
], E2 =
[0.1−0.1
], (31)
G11 =[
1 1], G12 =
[3 4
],
G21 =[
4 2], G22 =
[2 2
],
(32)
Γ1(t) = sin(t). (33)
The probability of packet transmission is expressed by aMarkov transition probability matrix P with
P =
0.06 0.48 0.460.10 0.60 0.300.08 0.52 0.40
. (34)
ILUR TRANSACTIONS ON SCIENCE AND ENGINEERING, Volume 2016 (2016), Article ID 20160101 7

By solving the LMIs in Theorem 1 with LMI toolbox [7],we can obtain the feedback gains as follows:
F1 = K−11 Y1 =
[ −0.0002 −1.0033],
F2 = K−12 Y2 =
[1.4222 −0.3674
].
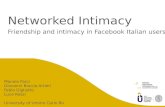
With the initial condition x1(0) = [1.1 − 1.1]T , x1(0) =[0 0]T , x2(0) = [1 − 1]T , x2(0) = [0 0]T , the state tra-jectories of NCSs (28) with multiple packet transmission areshown in Fig. 1 and Fig. 2. From the result of the example,we can see that the NCSs can be stabilized with only part ofthe state information transmitted, even include time-varyingnorm-bounded parameter uncertainties.
0 10 20 30 40 50−1.5
−1
−0.5
0
0.5
1
1.5
Step number
Sta
te v
alue
s
subsystem 1
Fig. 1: The state trajectories of NCS (28)
0 10 20 30 40 50−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Step number
Sta
te v
alue
s
subsystem 2
Fig. 2: The state trajectories of NCS (28)
Example 2. In this example, we also consider the situationthat the state information of every subsystems is split intotwo packets. The difference is that the controller gain to be
designed have parameter uncertainties.
x1(k + 1) = (A11 + E1Γ1(t)G11)x1(k) + (A12 + E1Γ1(t)G12)x2(k)
+B1(F1 + H1Γ2(t)J1)x1(k),
x2(k + 1) = (A21 + E2Γ1(t)G21)x1(k) + (A22 + E2Γ2(t)G22)x2(k)
+B2(F2 + H2Γ2(t)J2)x2(k),(35)
where
H1 =[
2 1], H2 =
[1 2
],
J1 = 0.1, J2 = 0.2, Γ2(t) = cos(t).
The values of the other matrixes are defined in (29), (30),(31), (32), (33), (34).
By solving the LMIs in Theorem 2 with LMI toolbox [7],we can also obtain the control gains as follows:
F1 = K−11 Y1 = [−0.0039 −0.8038], F2 = K
−12 Y2 = [3.2032 −0.2003].
With the initial condition x1(0) = [1.1 −1.1]T , x1(0) =[0 0]T , x2(0) = [1 − 1]T , x2(0) = [0 0]T , the statetrajectories of NCSs (35) with multiple packet transmissionare shown in Fig. 3 and Fig. 4.
0 10 20 30 40 50−1.5
−1
−0.5
0
0.5
1
1.5
Step number
Sta
te v
alue
s
subsystem 1
Fig. 3: The state trajectories of NCS (35)
The results of the two examples suggest that data packetcould be transmitted sparsely to save network bandwidthwhile preserving stability of the NCSs. These examples il-lustrate that the jump system approach proposed in this paperleads to effective results.
6 Conclusion
In this paper, we investigated robust stabilization problemof a class of uncertain multiple coupling NCSs with multi-ple transmission and packet dropout. The packet transitionsequence of the NCS was governed by a finite state Markovchain. Such coupling NCSs were modeled as jump linearsystems. By means of LMIs, we derived sufficient condi-tions on robust stability of the NCSs with norm-bounded pa-rameter uncertainties. Furthermore, we developed sufficient
ILUR TRANSACTIONS ON SCIENCE AND ENGINEERING, Volume 2016 (2016), Article ID 20160101 8

0 10 20 30 40 50−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Step number
Sta
te v
alue
ssubsystem 2
Fig. 4: The state trajectories of NCS (35)
conditions on the existence of non-fragile controller. Theeffectiveness of the proposed method is illustrated by twonumerical examples.
References
[1] Y. Sun and N. El-Farra, Quasi-decentralized model-based net-worked control of process systems, Computers and ChemicalEngineering, 32: 2016-2029, 2008.
[2] J. Liu, M. Yu, W. Tan and Z. Chai, Controller design of multi-subsystem with limited communication, Proceedings of the29th Chinese Control Conference, 854-858, 2010.
[3] W. Xiao, M. Yu and W. Tan, Controller design for networkedcontrol systems with limited bandwidth, Proc. Inter. Conf.Imup. Dyna. Syst. Appl. 569-573, 2005.
[4] N. El-Farra and Y. Sun Quasi-decentralized control of processsystems using wireless sensor networks with scheduled sen-sor transmissions, American Control Conference, 3390-3396,2009.
[5] N. Ding, M. Yu and W. Xiao A switched approach to sta-bilization of multiple networked control systems, 2011 6thIEEE Conference on Industrial Electronics and Applications,1056-1061, 2011.
[6] Y. Ji, H. Chizeck, X. Feng. Stability and control of discrete-time jump linear ystems, Control Theoery and AdvancedTechnology, 7: 247-270, 1991.
[7] S. Boyd, L. Ghaoui, E. Feron and V. Balakrishnan, Linearmatrix inequalities in systems and control theory, vol. 15.SIAM, Philadlphia, 1994.
[8] I. Petersen A stabilization algorithm for a class of uncertainlinear systems, Systems and control Letters, 8: 351-357, 1987.
[9] M. de Oliveira, J. Bernussou and J. Geromel, A new discrete-time robust stability condition, Systems and Control Letters,37: 261-265, 1999.
[10] O. Costa and M. Fragoso, Stability results for discrete-timelinear systems with Markovian jumping parameters, Journalof Mathematical Analysis and Applications, 179: 154-178,1993.
[11] W. Zhang, M. Branicky and S. Phillips, Stability of networkedcontrol systems, IEEE Control Systems Magazine, 21(1): 84–99, 2001.
[12] J. Hespanha, P. Naghshtabrizi and Y. Xu A survey of recentresults in networked conrol systems, Proceedings of the IEEE,95(1): 138–162, 2007.
[13] W. Wong and R.Brockett, Systems with finite communica-tion bandwidth constraints-I. state estimation problems, IEEETrans. Automat. Control, 42: 1294-1299, 1997.
[14] H. Ishii, H∞ control with limited communication and mes-sage losses, Proc. American Control Conference, 5620-5625,2006.
[15] L. Zhang, Y. Shi, T. Chen and B. Huang, A new method forstabilisation of networked control systems with random de-lays, IEEE Transactions on Automatic Control, 50(8): 1177-1181, 2005.
[16] H. Ishii and B. Francis, Stabilizing a linear system by switch-ing control with dwell time, IEEE Trans. Automat. Control,47(12): 1962–1973, 2002.
[17] L. Montestruque and P. Antsaklis, On the model-based con-trol of networked systems, Automatica, 39: 1837–1843, 2003.
[18] M. Yu, L. Wang, T. Chu and G. Xie, Stabilisation of net-worked control systems with data packet dropout and net-work delays via switching system approach, Proceedings ofthe 43rd IEEE Conference on Decision and Control, 14-17,2004.
[19] M. Yu, L. Wang, T. Chu and Q. Fu, Stabilisation of net-worked control systems with communication constraints, In-ternational Journal of Hybrid Systems, 4: 99-112, 2004.
[20] Y. Sun and S. Qin, Stability and stabilization of networkedcontrol systems with bounded packet dropout, Acta Automat-ica Sinica, 37 (1): 113-118, 2011.
[21] W. Ma and C. Shao, Stochastic Stability for networked controlsystems, Acta Automatica Sinica, 33(8): 878-882, 2007.
[22] P. Seiler and R. Sengupta, An H∞ approach to networkedcontrol, IEEE Transactions on Automatic Control, 50(3):356-364, 2005.
[23] D. Wu and J. Wu and S. Chen, Robust H∞ control fornetworked control systems with uncertainties and multiple-packet transmissionIET Control Theory Appl. 4(5): 701-709,2010.
[24] J. Sun and J. Jiang, Stability of uncertain networked controlsystems, International Conference on Advances in Engineer-ing, 551-557, 2011.
ILUR TRANSACTIONS ON SCIENCE AND ENGINEERING, Volume 2016 (2016), Article ID 20160101 9