Robsut Control Slides

of 139
-
Upload
faiz-rasool -
Category
Documents
-
view
225 -
download
0
Transcript of Robsut Control Slides
-
8/11/2019 Robsut Control Slides
1/139
COURSE ON LMI
PART II.1
LMIs IN SYSTEMS CONTROL
STATE-SPACE METHODS
STABILITY ANALYSIS
Didier HENRIONwww.laas.fr/henrion
October 2006
http://www.laas.fr/~henrionhttp://www.laas.fr/~henrionhttp://www.laas.fr/~henrionhttp://www.laas.fr/~henrion -
8/11/2019 Robsut Control Slides
2/139
State-space methodsDeveloped by Kalman and colleagues in the 1960s asan alternative to frequency-domain techniques (Bode,Nichols..)
Starting in the 1980s, numerical analysts developedpowerful linear algebra routines for matrix equations:numerical stability, low computational complexity, large-scale problems
Matlab launched by Cleve Moler (1977-1984) heavilyrelies on LINPACK, EISPACK & LAPACK packages
Pseudospectrum of a Toeplitz matrix
-
8/11/2019 Robsut Control Slides
3/139
Linear systems stability
The continuous-time linear time invariant (LTI)
system
x(t) =Ax(t) x(0) =x0
where x(t) Rn
is asymptotically stable,meaning
limt
x(t) = 0 x0
if and only if
there exists a quadratic Lyapunov functionV(x) =xPx such that
V(x(t)) > 0V(x(t)) < 0
along system trajectories equivalently, matrix A satisfies
maxi real i(A)
-
8/11/2019 Robsut Control Slides
4/139
Lyapunov stabilityNote that V(x) =xPx=x(P+ P)x/2so that Lyapunov matrix P can be chosensymmetric without loss of generality
Since V(x) = xPx + xPx=xAPx + xPAx positivityofV(x) and negativity ofV(x) along system trajectoriescan be expressed as an LMI
AP+ PA 0 P 0
Matrices P satisfying Lyapunovs LMI with A=
0 11 2
-
8/11/2019 Robsut Control Slides
5/139
Lyapunov equation
The Lyapunov LMI can be written equivalently
as the Lyapunov equation
AP+ PA + Q= 0
where Q 0
The following statements are equivalent
the system x=Ax is asymptotically stable
for some matrix Q 0 the matrix P solvingthe Lyapunov equation satisfies P 0
for all matrices Q 0 the matrix P solving
the Lyapunov equation satisfies P 0
The Lyapunov LMI can be solved numerically
without IP methods since solving the above
equation amounts to solving alinear systemof
n(n + 1)/2 equations in n(n + 1)/2 unknowns
-
8/11/2019 Robsut Control Slides
6/139
Alternative to Lyapunov LMI
Recall the theorem of alternatives for LMI
F(x) =F0+
i
xiFi
Exactly one statement is true there exists x s.t. F(x) 0
there exists a nonzero Z 0 s.t.trace F0Z 0 and trace FiZ= 0 for i >0
Alternative to Lyapunov LMI
F(x) = AP PA 0
0 P 0
is the existence of a nonzero matrix
Z=
Z1 0
0 Z2
0
such that
Z1A + AZ1 Z2= 0
-
8/11/2019 Robsut Control Slides
7/139
Alternative to Lyapunov LMI (proof)
Suppose that there exists such a matrix Z= 0and extract Cholesky factor
Z1=U U
Since Z1A + AZ1 0 we must have
AUU =USUwhere S=S1+ S2 and S1= S
1, S2 0
It follows from
AU=US
that U spans an invariant subspace of Aassociated with eigenvalues of S,which all satisfy real i(S) 0
Conversely, suppose i(A) = +j with 0for some i with eigenvector v
Then rank-one matrices
Z1=vv Z2 = 2vv
solve the alternative LMI
-
8/11/2019 Robsut Control Slides
8/139
Discrete-time Lyapunov LMI
Similarly, the discrete-time LTI system
xk+1=Axk
is asymptotically stable iff
there exists a quadratic Lyapunov function
V(x) =xPx such that
V(xk)>0V(xk+1) V(xk)
-
8/11/2019 Robsut Control Slides
9/139
More general stability regions
Let
D = {s C :
1s
d0 d1d1 d2
1s
-
8/11/2019 Robsut Control Slides
10/139
LMI stability regions
We can consider D-stability in LMI regions
D = {s C : D(s) =D0+ D1s + D1s
0}
such as
D dynamicsreal(s)< dominant behaviorreal(s)< , |s| < r oscillations1
-
8/11/2019 Robsut Control Slides
11/139
Lyapunov LMI for LMI stability regions
Matrix A has all its eigenvalues in the region
D = {s C : D0+ D1s + D1s
0}
if and only if the following LMI is feasible
D0 P+ D1 AP+ D1 PA
0 P 0
where denotes the Kronecker product
Litterally replace s with A !
Can be extended readily to quadratic matrix
inequality stability regions
D = {s C : D0+ D1s + D1s
+ D2ss 0}
parabolae, hyperbolae, ellipses etc
convex (D2 0) or not
-
8/11/2019 Robsut Control Slides
12/139
Uncertain systems and robustness
When modeling systems we face severalsources
of uncertainty, including
non-parametric (unstructured) uncertainty unmodeled dynamics truncated high frequency modes
non-linearities effects of linearization, time-variation..
parametric (structured) uncertainty physical parameters vary within given bounds interval uncertainty (l) ellipsoidal uncertainty (l
2)
diamond uncertainty (l1)
How can we overcome uncertainty ? model predictive control adaptive control robust control
A control law is robust if it is valid over the
whole range of admissible uncertainty (can be
designed off-line, usually cheap)
-
8/11/2019 Robsut Control Slides
13/139
Uncertainty modeling
Consider the continuous-time LTI system
x(t) =Ax(t) A A
where matrix A belongs to an uncertainty set
A
For unstructured uncertainties we consider
norm-bounded matrices
A = {A + BC : 2 }
For structured uncertainties we considerpolytopic matrices
A = conv {A1, . . . , AN}
There are other more sophisticated uncertainty
models not covered here
Uncertainty modeling is an important and
difficult step in control system design !
-
8/11/2019 Robsut Control Slides
14/139
Robust stability
The continuous-time LTI system
x(t) =Ax(t) A A
is robustly stable when it is asymptoticallystable for all A A
If S denotes the set of stable matrices, thenrobust stability is ensured as soon as A SUnfortunately S is a non-convex cone !
Non-convex setof continuous-time
stable matrices
1 xy z
-
8/11/2019 Robsut Control Slides
15/139
Symmetry
If dynamic systems were symmetric, i.e
A=A
continuous-time stability maxi reali(A) < 0 would beequivalent to
A + A 0
and discrete-time stability maxi |i(A)|
-
8/11/2019 Robsut Control Slides
16/139
Robust and quadratic stability
Because of non-convexity of the cone of stable
matrices, robust stability is sometimesdifficult
to check numerically, meaning that
computational cost is an exponential functionof the number of system parameters
Remedy:
The continuous-time LTI system x(t) =Ax(t)
isquadratically stableif its robust stability can
be guaranteed with the same quadraticLyapunov function for all A A
Obviously, quadratic stability is more pessimistic,
or more conservative than robust stability:
Quadratic stability = Robust stability
but the converse is not always true
-
8/11/2019 Robsut Control Slides
17/139
Quadratic stability for polytopic uncertainty
The system with polytopic uncertainty
x(t) =Ax(t) A conv {A1, . . . , AN}
is quadratically stable iff there exists a matrix
P solving the LMI
ATi P+ PAi 0 P 0
Proof by convexity
i
i(ATi P+ PAi) =A
T()P+ PA() 0
for all i 0 such that
i i = 1
This is a vertex result: stability of a whole
family of matrices is ensured by stability of the
vertices of the family
Usually vertex results ensure
computational tractability
-
8/11/2019 Robsut Control Slides
18/139
-
8/11/2019 Robsut Control Slides
19/139
Quadratic stability for norm-boundeduncertainty
The system with norm-bounded uncertainty
x(t) = (A + BC)x(t) 2
is quadratically stable iff there exists a matrix
P solving the LMI
AP+ PA + CC PB
BP 2I
0 P 0
with 1 =
This is called the bounded-real lemma
proved next with the S-procedure
We can maximize the level of
allowed uncertainty by minimizing scalar
-
8/11/2019 Robsut Control Slides
20/139
Norm-bounded uncertainty as feedback
Uncertain system
x= (A + BC)x
can be written as the feedback system
x = Ax + Bw
z = Cxw = z
.x = Ax+Bw
w z
so that for the Lyapunov function V(x) =xPxwe have
V(x) = 2xPx
= 2xP(Ax + Bw)= x(AP+ PA)x + 2xPBw
=
xw
AP+ PA PB
BP 0
xw
-
8/11/2019 Robsut Control Slides
21/139
Norm-bounded uncertainty as feedback (2)
Since 2I it follows that
ww =zz 2zz
w
w 2
z
z = x
w CC 0
0 2I x
w 0
Combining with the quadratic inequality
V(x) =
xw
AP+ PA PB
BP 0
xw
-
8/11/2019 Robsut Control Slides
22/139
Norm-bounded uncertainty: generalization
Now consider the feedback system
x = Ax + Bwz = Cx+Dw
w = z
with additional feedthrough term Dw
We assume that matrix ID is non-singular
= well-posedness of feedback interconnection
so that we can write
w= z = (Cx + Dw)(ID)w= Cx
w= (ID)1Cx
and derive the linear fractional transformation
(LFT) uncertainty description
x=Ax + Bw = (A + B(ID)1C)x
-
8/11/2019 Robsut Control Slides
23/139
Norm-bounded LFT uncertainty
The system with norm-bounded
LFT uncertainty
x= A + B(ID)1
x 2 is quadratically stable iff there exists a matrix
P solving the LMI
AP+ PA + CC PB+ CD
BP+ DC DD 2I
0 P 0
Notice the lower right block DD 2I 0
which ensures non-singularity ofID hence
well-posedness
LFT modeling can be used more generally tocope with rational functions of uncertain pa-
rameters, but this is not covered in this course..
-
8/11/2019 Robsut Control Slides
24/139
Sector-bounded uncertainty
Consider the feedback system
x = Ax + Bwz = Cx + Dw
w = f(z)
where vector function f(z) satisfies
zf(z) 0 f(0) = 0
which is a sector condition
f(z)
z
f(z) can also be considered as an uncertainty
but also as a non-linearity
-
8/11/2019 Robsut Control Slides
25/139
Quadratic stability for sector-bounded
uncertainty
We want to establish quadratic stability with
the quadratic Lyapunov matrix V(x) = xPx
whose derivative
V(x) = 2xP(Ax + Bf(z))
=
xf(z)
AP+ PA PB
BP 0
xf(z)
must be negative when
2zf(z) = 2(Cx + Df(z))f(z)
=
xf(z)
0 C
C D+ D
xf(z)
is non-positive, so we invoke the S-procedure
to derive the LMI
AP+ PA PB CBP C D D
0 P 0
This is called the positive-real lemma
-
8/11/2019 Robsut Control Slides
26/139
Parameter-dependent Lyapunov functions
Quadratic stability: fast variation of parameters computationally tractable conservative, or pessimistic (worst-case)
Robust stability: no variation of parameters computationally difficult (in general) exact (is it really relevant ?)
Is there something in between ?
For example, given an LTI system affected by box,or interval uncertainty
x(t) =A((t))x(t) = (A0+N
i=1 i(t)Ai)x(t)
where
= {i [i, i]}
we may consider parameter-dependentLyapunov matrices, such as
P((t)) =P0+
i i(t)Pi
-
8/11/2019 Robsut Control Slides
27/139
Polytopic Lyapunov certificate
Quadratic Lyapunov function V(x) = xP()x must bepositive with negative derivative along systemtrajectory hence
P() 0
and
A()P() + P()A() + P() 0
We have to solve parametrized LMIs
Parametrized LMIs feature non-linear terms in soit isnot enoughto check vertices of , denoted by vert
21 1+ 2 0 on vert but not everywhere on = [0, 1] [0, 1]
-
8/11/2019 Robsut Control Slides
28/139
Parametrized LMIs
Central problem in robustness analysis:
find x such that
F(x, ) = F(x) 0,
where is a compact set, typically the unit
simplex or the unit ball
Convex but infinite-dimensional problem
which is difficult in general
Matrix extensions of polynomial positivity
conditions, for which varioushierarchies of LMIs
are available:
Polyas theorem
Schmudgens representation
Putinar representation
See EJC 2006 survey by Carsten Scherer
-
8/11/2019 Robsut Control Slides
29/139
-
8/11/2019 Robsut Control Slides
30/139
H2 norm
The H2 norm is the energy (l2 norm) of the impulseresponse h(t) of a system G
G2 =
0
h(t)h(t)dt
1/2=
1
2
H(j)H(j)d
1/2
For a continuous-time system
x = Ax + Buy = Cx + Du
with transfer function G(s) =C(sIA)1B +D we mustassume D = 0 to have G2 finite
-
8/11/2019 Robsut Control Slides
31/139
Computing the H2 norm
Let hi(t) = CeAtBi denote the i-th column of
the impulse response of G, then
G22 =
i
hi22
= i
0
Bi eAtCCeAtBidt
= trace B
0eA
tCCeAtdt
B
Matrix
Po =
0eA
tCCeAtdt
is the observability Grammian solution to theLyapunov equation
APo+ PoA + CC= 0
and hence
G22= trace BPoB
If (A, C) observable then Po 0
-
8/11/2019 Robsut Control Slides
32/139
Dual and LMI computation of the H2 norm
Defining the controllability Grammian
Pc =
0eAtBBeA
tdt
solution to the Lyapunov equation
APc+ PcA + BB = 0
we have a dual expression
G22= trace CPcC
Dual lyapunov equations formulated as LMIs
G22 = min trace BPB
s.t. AP+ PA + CC 0P 0
G22 = min trace CQC
s.t. AQ + QA + BB 0Q 0
-
8/11/2019 Robsut Control Slides
33/139
H norm
The H norm is the induced energy gain
(l2 to l2)
G = supx2=1
Gx2= supG(j)
It is the worst case gain
-
8/11/2019 Robsut Control Slides
34/139
Computing the H norm
In contrast with the H2 norm, computation of
the H norm is iterative
For the continuous-time linear system
x = Ax + Buy = Cx + Du
with transfer functionG(s) =C(sIA)1B+D
we have G(s) < iff R = 2I DD 0
and the Hamiltonian matrix
A + BR1DC BR1B
C(I+ DR1D)C (A + BR1DC)
has no eigenvalues on the imaginary axis
We can then design a bisection algorithmwith guaranteed quadratic convergence
to find the minimum value of such that
the Hamiltonian has no imaginary eigenvalues
-
8/11/2019 Robsut Control Slides
35/139
LMI computation of the H norm
Refer to the part of the course on norm-boundeduncertainty
supz2=1
w = < 1
to prove that for the continuous-time system
x = Ax + Buy = Cx + Du
with transfer functionG(s) =C(sIA)1B+Dwe have G(s) < iff there exists a matrixP solving the LMI
AP+ PA + CC PB+ CD
BP+ DC DD 2I
0 P 0
Using the Schur complement and a change ofvariables this can be expanded to
A
P+ PA PB C
BP I D
C D I
0 P 0
-
8/11/2019 Robsut Control Slides
36/139
Linear systems design
Open-loop continuous-time LTI system
x=Ax + Bu
with state-feedback controller
u=Kx
produces closed-loop system
x= (A + BK)x
Applying Lyapunov LMI stability condition
(A + BK)P+ P(A + BK) 0 P 0
we get bilinear terms..
Bilinear Matrix Inequalities (BMIs) are
non-convex in general !
-
8/11/2019 Robsut Control Slides
37/139
-
8/11/2019 Robsut Control Slides
38/139
Finslers lemma
A very useful trick in robust control..
The following statements are equivalent
1. xAx >0 for all x = 0 s.t. Bx= 02. BAB >0 where BB = 03. A + BB >0 for some scalar 4. A + XB+ BX >0 for some matrix X
Paul Finsler(1894 Heilbronn - 1970 Zurich)
-
8/11/2019 Robsut Control Slides
39/139
State-feedback design: null-space projection
We can also use item 2 of Finslers lemma,
projecting onto the (full column rank)
null-space B of B
BB = 0
so that BMI
AP+ PA + KBP+ PBK 0
is equivalent to the projected LMI
B(AQ + QA)B 0 Q 0
Feedback K can be recovered from
Lyapunov matrix Q as
K= BQ1
where is a suitably large scalar
Here we obtained an LMI thanks to a
projection onto a null-space
-
8/11/2019 Robsut Control Slides
40/139
-
8/11/2019 Robsut Control Slides
41/139
Robust state-feedback design
for polytopic uncertainty
Open-loop system x=Ax + Bu with polytopic
uncertainty
(A, B) conv {(A1, B1), . . . , (AN
, BN
)}
androbust state-feedback controller u=Kx
In order to derive synthesis condition,
we start with analysis conditions
(Ai+ BiK)P+ P(Ai+ BiK) 0 i Q 0
and we obtain thequadratic stabilizabilityLMI
AiQ + QAi + BiY + Y
Bi 0 i Q 0
with the linearizing change of variables
Q=P1 Y =KP1
-
8/11/2019 Robsut Control Slides
42/139
State-feedback H2 control
Continuous-time LTI open-loop system
x = Ax + Bww+ Buuz = Czx + Dzww+ Dzuu
with state-feedback controller
u=Kx
yields closed-loop system
x = (A + BuK)x + Bwwz = (Cz+ DzuK)x + Dzww
with transfer function
G(s) =Dzw + (Cz + DzuK)(sIABuK)1Bw
between performance signals w and z
H2 performance specification
G(s)2<
We must have Dzw = 0 (finite gain)
-
8/11/2019 Robsut Control Slides
43/139
H2 design LMIs
As usual, start with analysis condition:
there exists K such that G(s)2< iff
trace (Cz+ DzuK)Q(Cz+ DzuK) < (A + BuK)Q + Q(A + BuK) + BB 0
The trace inequality can be written as
trace(Cz +DzuK)Q(Cz +DzuK)
-
8/11/2019 Robsut Control Slides
44/139
State-feedback H control
Similarly, with closed-loop system
x = (A + BuK)x + Bwwz = (Cz+ DzuK)x + Dzww
and H performance specification
G(s)<
on transfer function betweenw andz we obtain
the design LMI
AQ + QA + BuY + YBu+ BwB
w
CzQ + DzuY + DzwBw DzwDzw
2I
0
Q 0
with resulting H suboptimal state-feedback
K=YQ1
Optimal H control: minimize
-
8/11/2019 Robsut Control Slides
45/139
Mixed H2/H control
State-feedback controller systemwith two performance channels
x = (A + BuK)x + Bwwz = (C+ DuK)x + Dwwz2 = (C2+ D2uK)x
and mixed performance specifications
G(s) < G2(s)2< 2
on transfer functions from w to z and z2 respectively
Formulation of H constraint
AQ+ BuKQ+ () + BwBw
CQ+ DuKQ+ DwBw DwDw
2I 0
Q 0BMI formulation of H2 constraint
trace W < 2 W C2Q2+ D2uKQ2
Q2
0
AQ2+ BuKQ2+ () + BwBw 0
Problem:
We cannot linearize simultaneouslyterms KQ and KQ2 !
-
8/11/2019 Robsut Control Slides
46/139
Mixed H2/H control design LMI
Remedy:
Enforce Q2 =Q=Q !
Conservative but useful.. Always trade-off
between conservatism and tractability
Resulting mixed H2/H design LMI
AQ + BuY + () + BwBw
CQ + DuY + DwBw DwDw
2I
0
trace W < 2 W C2Q + D2uY
Q
0
AQ + BuY + () + BwBw 0
Guaranteed cost mixed H2/H:
given
minimize 2
Can be used forH2design of uncertain systems
with norm-bounded uncertainty
-
8/11/2019 Robsut Control Slides
47/139
Mixed H2/H control: example
Active suspension system (Weiland)
m2q2+ b2(q2 q1) + k2(q2 q1) + F = 0m1q1+ b2(q1 q2) + k2(q1 q2)
+k1(q1 q0) + b1(q1 q0) + F = 0
z = q1 q0
F
q2q2 q1 y = q2
q2 q1 w =q0 u= F
G(s) from q0 to [q1 q0 F]G2(s) from q0 to [q2 q2 q1]
Trade-off between G 1 and G22 2
-
8/11/2019 Robsut Control Slides
48/139
Dynamic output-feedback
Continuous-time LTI open-loop system
x = Ax + Bww+ Buuz = Czx + Dzww+ Dzuuy = Cyx + Dyww
with dynamic output-feedback controller
xc = Acxc+ Bcyu = Ccxc+ Dcy
Denote closed-loop system asx = Ax + Bwz = Cx + Dw
with x=
xxc
and
A=
A + BuDcCy BuCc
BcCy Ac
B =
Bw+ BuDcDyw
BcDyw
C=
Cz+ DzuDcCy DzuCc
D =Dzw+ DzuDcDyw
Affine expressions on controller matrices
-
8/11/2019 Robsut Control Slides
49/139
H2 output feedback design
H2 design conditions
trace W < W CQ
Q
0
AQ + QA BB I
0
can be linearized with a specificchange of variables
Denote
Q=
Q QQ
P = Q1 =
P PP
so that P and Q can be obtainedfrom P and Q via relation
P Q + PQ=I
Always possible when controller hassame orderthan the open-loop plant
-
8/11/2019 Robsut Control Slides
50/139
-
8/11/2019 Robsut Control Slides
51/139
H output-feedback design
Similarly two-step procedure for full-order Houtput-feedback design:
solve LMI for Lyapunov variables Q, P, W and
controller variables X, Y, U, V
retrieve controller matrices via linear algebra
For reduced-order controller of order nc < n
there exists a solution P,Q to the equation
P Q + PQ=I
iff
rank (P Q I) =nc
rank
Q I
I P
=n + nc
Static output feedback iff P Q=I
Difficult rank constrained LMI !
-
8/11/2019 Robsut Control Slides
52/139
H output-feedback design
Alternative LMI formulation viaprojectionontonull-spaces (recall Finslers lemma)
N
AQ + QA QCz Bw
I Dzw
I
N 0
M
A
P+ PA PBw Cz I Dzw I
M 0
Q I
I P
0
where N and M are null-space basis
Bu D
zu 0
N = 0
Cu Dyw 0
M = 0
Controller coefficients retrieved afterwards
with a similar change of variables
Alleviate assumptions of Riccati approach(Dzu and Dyw full rank, no imaginary zeros)
-
8/11/2019 Robsut Control Slides
53/139
COURSE ON LMI
PART II.3
LMIs IN SYSTEMS CONTROL
ROBUSTNESS ANALYSIS
POLYNOMIAL METHODS
Didier HENRIONwww.laas.fr/henrion
October 2006
http://www.laas.fr/~henrionhttp://www.laas.fr/~henrionhttp://www.laas.fr/~henrionhttp://www.laas.fr/~henrion -
8/11/2019 Robsut Control Slides
54/139
Polynomial methods
Based on the algebra of polynomials and
polynomial matrices, typically involve
linear Diophantine equations quadratic spectral factorization
Pioneered in central Europe during the 70smainly by Vladimr Kucera from the former
Czechoslovak Academy of Sciences
Network funded by the European commission
www.utia.cas.cz/europoly
Polynomial matrices also occur in Jan Willems
behavorial approach to systems theory
Alternative to state-space methods developed
during the 60s most notably by Rudolf Kalmanin the USA, rather based on
linear Lyapunov equations quadratic Riccati equations
http://www.utia.cas.cz/europolyhttp://www.utia.cas.cz/europoly -
8/11/2019 Robsut Control Slides
55/139
Ratio of polynomials
A scalar transfer function can be viewed as theratio of two polynomials
Example
Consider the mechanical system
k2
1k
m
u
y
y displacement u external force
k1 viscous friction coeff k2 spring constant
m mass
Neglecting static and Coloumb frictions, we
obtain the linear transfer function
G(s) =y(s)
u(s)=
1
ms2 + k1s + k2
-
8/11/2019 Robsut Control Slides
56/139
Ratio of polynomial matrices
Similarly, a MIMO transfer function can be
viewed as the ratio ofpolynomial matrices
G(s) =NR(s)D1R (s) =D
1L (s)NL(s)
the so-called matrix fraction description (MFD)
Lightly damped structuressuch as oil derricks,
regional power models, earthquakes models,
mechanical multi-body systems, damped gyro-
scopic systems are most naturally represented
by second order polynomial MFDs
(D0+ D1s + D2s2)y(s) =N0u(s)
Example
The (simplified) oscillations of a wing in an air streamis captured by properties of the quadratic polynomialmatrix[Lancaster 1966]
D(s) = 121 18.9 15.9
0 2.7 0.14511.9 3.64 15.5
+ 7.66 2.45 2.1
0.23 1.04 0.2230.6 0.756 0.658
s+ 17.6 1.28 2.891.28 0.824 0.4132.89 0.413 0.725
s2
-
8/11/2019 Robsut Control Slides
57/139
First-order polynomial MFD
Example
RCL network
C
R
L
u y y21
y1 voltage through inductor y2 current through inductor
u voltage
Applying Kirchoffs laws and Laplace transform we get 1 LsCs 1 + RCs
y1(s)y2(s)
=
0Cs
u(s)
and thus the first-order left system MFD
G(s) =
1 LsCs 1 + RCs
1 0Cs
.
-
8/11/2019 Robsut Control Slides
58/139
Second-order polynomial MFD
Example
mass-spring system
Vibration of system governed by 2nd-order differential
equation Mx + Cx + Kx= 0 where e.g. n= 250, mi =1, i = 5, i = 10 except 1 =n= 10 and 1 =n = 20
Quadratic matrix polynomial
D(s) =M s2 + Cs + K
with
M=IC= tridiag(10, 30, 10)
K= tridiag(5, 15, 5).
-
8/11/2019 Robsut Control Slides
59/139
-
8/11/2019 Robsut Control Slides
60/139
More examples of polynomial MFDs
Higher degree polynomial matrices can also
be found in aero-acoustics (3rd degree) or in
the study of the spatial stability of the Orr-
Sommerfeld equation for plane Poiseuille flow
in fluid mechanics (4rd degree)
Pseudospectra of Orr-Sommerfeld equation
For more info see Nick Highams homepage at
www.ma.man.ac.uk/higham
http://www.ma.man.ac.uk/~highamhttp://www.ma.man.ac.uk/~highamhttp://www.ma.man.ac.uk/~highamhttp://www.ma.man.ac.uk/~higham -
8/11/2019 Robsut Control Slides
61/139
Stability analysis for polynomials
Well established theory - LMIs are of no use here !
Given a continuous-time polynomial
p(s) =p0+ p1s + +pn1sn1 +pns
n
with pn >0 we define its n n Hurwitz matrix
H(p) =
pn1 pn3 0 0pn pn2... ...
0 pn1 . . . 0 0
0 pn p0 0... ... p1 00 0 p2 p0
Hurwitz stability criterion: Polynomial p(s) is stable iff
all principal minors of H(p) are >0
Adolf Hurwitz(Hanover 1859 - Zurich 1919)
-
8/11/2019 Robsut Control Slides
62/139
Robust stability analysis for polynomials
Analyzingstability robustnessof polynomials is
a little bit more interesting..
Here toocomputational complexitydepends on
theuncertainty model
In increasing order of complexity, we will
distinguish between
single parameter uncertainty q[qmin, qmax] interval uncertainty qi [qimin, qimax]
polytopic uncertainty 1q1+ + NqN multilinear uncertainty q0+ q1 q2 q3
LMIs will not show up very soon....justbasic linear algebra
-
8/11/2019 Robsut Control Slides
63/139
Single parameter uncertainty
and eigenvalue criterion
Consider the uncertain polynomial
p(s, q) =p0(s) + qp1(s)
where p0(s) nominally stable with positive coefs p1(s) such that degp1(s)
-
8/11/2019 Robsut Control Slides
64/139
Higher powers of a single parameterNow consider the continuous-time polynomial
p(s, q) =p0(s) + qp1(s) + q2p2(s) + + qmpm(s)
with p0(s) stable and degp0(s)>degpi(s)
Using the zeros (roots of determinant) of thepolynomialHurwitz matrix
H(p) =H(p0) + qH(p1) + q2H(p2) + + q
mH(pm)
we can show that
qmin = 1/min(M)qmax = 1/
+max(M)
where
M=
0 0 0... . . . ... ...0 I 0
0 0 IH10 Hm H
10 H2 H
10 H1
is a block companion matrix
-
8/11/2019 Robsut Control Slides
65/139
MIMO systems
Uncertain multivariable systems are modeled
by uncertain polynomial matrices
P(s, q) =P0(s)+qP1(s)+q2P2(s)+ +q
mPm(s)
where p0(s) = det P0(s) is a stable polynomial
We can apply the scalar procedure to the
determinant polynomial
det P(s, q) =p0(s)+qp1(s)+q2p2(s)+ +q
rpr(s)
Example
MIMO design on the plant with left MFD
A1(s, q)B(s, q) =
s2 q
q2 + 1 s
1 s + 1 0
q 1
=
s
2
+ s q2
qqs2 (q2 + 1)s (q2 + 1) s2
s3q2q
with uncertain parameter q [0, 1]
-
8/11/2019 Robsut Control Slides
66/139
MIMO systems: example
Using some design method, we obtain a
controller with right MFD
Y(s)X1(s) = 94 51s 1 8 + 1 7s55 100 55 + s 171 18 + s Closed-loop system with characteristic
denominator polynomial matrix
D(s, q) = A(s, q)X(s) + B(s, q)Y(s)= D0(s) + qD1(s) + q
2D2(s)
Nominal system poles: roots of det D0(s)
Applying theeigenvalue criterionon det D(s, q)
yields the stability interval
q ] 0.93, 1.17[ [0, 1]
so the closed-loop system is robustly stable
-
8/11/2019 Robsut Control Slides
67/139
Independent uncertainty
So far we have studied polynomials affected bya single uncertain parameter
p(s, q) = (6 + q) + ( 4 + q)s + ( 2 + q)s2
However in practiceseveralparameters can beuncertain, such as in
p(s, q) = (6 + q0) + ( 4 + q1)s + ( 2 + q2)s2
Independent uncertainty structure: eachcomponent qi enters into only one coefficient
Intervaluncertainty: independent structure anduncertain parameter vectorqbelongs to a givenbox, i.e. qi [q
i , q
+i ]
Example
Uncertain polynomial
(6 + q0) + ( 4 + q1)s + ( 2 + q2)s2, |qi| 1
has interval uncertainty, also denoted as
[5, 7] + [3, 5]s + [1, 3]s2
Some coefficients can be fixed, e.g.
6 + [3, 5]s + 2s2
-
8/11/2019 Robsut Control Slides
68/139
Kharitonovs polynomials
Associated with the interval polynomial
p(s, q) =n
i=0
[qi , q+i ]s
i
are four Kharitonovs polynomials
p(s) = q0 + q1 s + q
+2 s
2 + q+3 s3 + q4 s
4 + q5 s5 +
p+(s) = q0 + q+1s + q
+2 s
2 + q3 s3 + q4 s
4 + q+5s5 +
p+(s) = q+0 + q1 s + q
2 s
2 + q+3 s3 + q+4 s
4 + q5 s5 +
p++(s) = q+0 + q+1s + q
2 s
2 + q3 s3 + q+4 s
4 + q+5 s5 +
where we assume q
n >0 and q
+
n >0
Example
Interval polynomial
p(s, q) = [1, 2 ] + [ 3, 4]s + [5, 6]s2 + [7, 8]s3
Kharitonovs polynomials
p(s) = 1 + 3s + 6s2 + 8s3p+(s) = 1 + 4s + 6s2 + 7s3
p+(s) = 2 + 3s + 5s2 + 8s3
p++(s) = 2 + 4s + 5s2 + 7s3
-
8/11/2019 Robsut Control Slides
69/139
Kharitonovs theorem
In 1978 the Russian researcher Vladimr Kharitonov
proved the following fundamental result
A continuous-time interval polynomialis robustly stable iff its
four Kharitonov polynomials are stable
Instead of checking stability of an infinite
number of polynomials we just have to check
stability offourpolynomials, which can be done
using the classical Hurwitz criterion
Peter and Paul fortress in St Petersburg
-
8/11/2019 Robsut Control Slides
70/139
Affine uncertainty
Sadly, Kharitonovs theorem is valid only for continuous-time polynomials for independent interval uncertaintyso that we have to use more general tools in practice
When coefficients of an uncertain polynomial p(s, q) or
a rational function n(s, q)/d(s, q) depend affinely onparameter q, such as in
aTq+ b
we speak about affine uncertainty
x(s)
n(s,q)
d(s,q)
y(s)
The above feedback interconnection
n(s, q)x(s)d(s, q)x(s) + n(s, q)y(s)
preserves the affine uncertainty structure of the plant
-
8/11/2019 Robsut Control Slides
71/139
Polytopes of polynomials
A family of polynomials p(s, q), q Q is said to
be a polytope of polynomials if
p(s, q) has an affine uncertainty structure
Q is a polytope
There is a natural isomorphism between
a polytope of polynomials and its
set of coefficients
Example
p(s, q) = (2q1 q2+ 5) + (4q1+ 3q2+ 2)s + s2, |qi| 1Uncertainty polytope has 4 generating vertices
q1 = [1, 1] q2 = [1, 1]q3 = [1, 1] q4 = [1, 1]
Uncertain polynomial family has 4 generating vertices
p(s, q1) = 4 5s + s2 p(s, q2) = 2 + s + s2
p(s, q3) = 8 + 3s + s2 p(s, q4) = 6 + 9s + s2
Any polynomial in the family can be written as
p(s, q) =
4i=1
ip(s, qi),
4i=1
i= 1, i 0
-
8/11/2019 Robsut Control Slides
72/139
Interval polynomials
Interval polynomials are a special case of
polytopic polynomials
p(s, q) =n
i=0
[qi , q+i ]s
i
with at most 2n+1 generating vertices
p(s, qk) =n
i=0
qki si, qki =
qior
q+i
1k2n+1
Example
The interval polynomialp(s, q) = [5, 6] + [3, 4]s + 5s2 + [7, 8]s3 + s4
can be generated by the 23 = 8 vertex polynomials
p(s, q1) = 5 + 3s + 5s2 + 7s3 + s4
p(s, q2) = 6 + 3s + 5s2 + 7s3 + s4
p(s, q3) = 5 + 4s + 5s2 + 7s3 + s4
p(s, q4) = 6 + 4s + 5s2 + 7s3 + s4
p(s, q5) = 5 + 3s + 5s2 + 8s3 + s4p(s, q6) = 6 + 3s + 5s2 + 8s3 + s4
p(s, q7) = 5 + 4s + 5s2 + 8s3 + s4
p(s, q8) = 6 + 4s + 5s2 + 8s3 + s4
-
8/11/2019 Robsut Control Slides
73/139
The edge theorem
Let p(s, q), qQ be a polynomial with
invariant degree over polytopic set Q
Polynomial p(s, q) is robustly stableover the whole uncertainty polytope Q
iff p(s, q) is stable along the edges of Q
In other words, it is enough to check robust
stability of the single parameter polynomial
p(s, qi1) + ( 1 )p(s, qi2), [0, 1]
for each pair of vertices qi1 and qi2 of Q
This can be done with the eigenvalue criterion
-
8/11/2019 Robsut Control Slides
74/139
-
8/11/2019 Robsut Control Slides
75/139
More about uncertainty structure
In typical applications, uncertainty structure is
more complicated than interval or affine
Usually, uncertainty enters highly non-linearly
in the closed-loop characteristic polynomial
We distinguish between
multilinear uncertainty, when each uncertain
parameter qi is linear when other parameters
qj, i=j are fixed polynomic uncertainty, when coefficients are
multivariable polynomials in parameters qi
We can define the following hierarchy on the
uncertainty structures
interval affine multilinear polynomic
-
8/11/2019 Robsut Control Slides
76/139
Examples of uncertainty structures
Examples
The uncertain polynomial
(5q1 q2+ 5) + (4q1+ q2+ q3)s + s2
has affine uncertainty structure
The uncertain polynomial
(5q1 q2+ 5) + (4q1q3 6q1q3+ q3)s + s2
has multilinear uncertainty structure
The uncertain polynomial
(5q1 q2+ 5) + (4q1 6q1 q23)s + s
2
has polynomic (here quadratic) uncertainty
structure
The uncertain polynomial
(5q1 q2+ 5) + (4q1 6q1q23+ q3)s + s
2
has polynomic uncertainty structure
-
8/11/2019 Robsut Control Slides
77/139
-
8/11/2019 Robsut Control Slides
78/139
-
8/11/2019 Robsut Control Slides
79/139
Polynomial stability analysis: summary
Checking robust stability can be
easy (polynomial-time algorithms) or more
difficult (exponential complexity)
depending namely on the uncertainty model
We focused on polytopic uncertainty:
Interval scalar polynomials
Kharitonovs theorem (ct only)
Polytope of scalar polynomials(affine polynomial families)
Edge theorem
Interval matrix polynomials
(multiaffine polynomial families)
Mapping theorem
Polytopes of matrix polynomials(polynomic polynomial families)
-
8/11/2019 Robsut Control Slides
80/139
Lessons from robust analysis:
lack of extreme point results
Ensuring robust stability of the parametrized
polynomial
p(s, q) =p0(s) + qp1(s)q [qmin, qmax]
amounts to ensuring robust stability of the
whole segment of polynomials
p(s, qmin) + ( 1 )p(s, qmax)
= qmaxqqmaxqmin[0, 1]
A natural question arises: does stability of twovertices imply stability of the segment ?
Unfortunately, the answer is no
Example
First vertex: 0.5 7 + 6s + s2
+ 10s3
stableSecond vertex: 1.5 7 + 8s + 2s2 + 10s3 stable
But middle of segment:
1.0 7 + 7s + 1.50s2 + 10s3 unstable
-
8/11/2019 Robsut Control Slides
81/139
Lessons from robust analysis:
lack of edge results
In the same way there is lack of vertex results
for affine uncertainty, there is a lack of edge
results for multilinear uncertainty
ExampleConsider the uncertain polynomial
p(s, q) = (4.032q1q2+ 3.773q1+ 1.985q2+ 1.853)+(1.06q1q2+ 4.841q1+ 1.561q2+ 3.164)s+(q1q2+ 2.06q1+ 1.561q2+ 2.871)s2
+(q1+ q2+ 2.56)s3 + s4
with multilinear uncertainty over the polytope
q1 [0, 1], q2 [0, 3], corresponding to the
state-space interval matrix
p(s, q) = det(sI
[1.5, 0.5] 12.06 0.06 00.25 0.03 1 0.5
0.25 4 1.03 00 0.5 0 [4, 1]
)
The four edges of the uncertainty bounding
set arestable, however for q1= 0.5 and q2= 1
polynomial p(s, q) is unstable..
-
8/11/2019 Robsut Control Slides
82/139
Non-convexity of stability domain
Main problem: the stability domain in the space
of polynomial coefficients pi is non-convex in
general
0 1 2 3 4 5 61
0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
UNSTABLE
STABLE
q1
q2
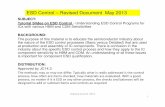
Discrete-time stability domain in (q1, q2) plane for poly-
nomial p(z, q) = (0.825 + 0.225q1+ 0.1q2) + (0.895 +
0.025q1+ 0.09q2)z+ (2.4 7 5 + 0.675q1+ 0.3q2)z2
+ z3
How can weovercomethe non-convexity of the
stability conditions in the coefficient space ?
-
8/11/2019 Robsut Control Slides
83/139
Handling non-convexity
Basically, we can pursue two approaches:
we canapproximatethe non-convex stabilitydomain with a convex domain (segment, polytope,sphere, ellipsoid, LMI)
we can address the non-convexity with thehelp of non-convex optimization (global or localoptimization)
-
8/11/2019 Robsut Control Slides
84/139
Stability polytopes
Largesthyper-rectangle around a nominally
stable polynomial
p(s) + rn
i=0
[i, i]si
obtained with the eigenvalue criterion appliedon the 4 Kharitonov polynomials
In general, there is no systematic way to
obtain more general stability polytopes, namely
because of computational complexity
(no analytic formula for the volume of a polytope)
Well-known candidates:
ct LHP: outer approximation(necessary stab cond)positive cone pi >0
dt unit disk: inner approximation(sufficient stab cond)diamond |p0| + |p1| + + |pn1|
-
8/11/2019 Robsut Control Slides
85/139
Stability region (second degree)
Necessary stab cond in dt: convex hull of
stability domain is a polytope whose n + 1vertices are polynomials with roots +1 or -1
Example
When n= 2: triangle with vertices(z+ 1)(z+ 1) = 1 + 2z+ z2
(z+ 1)(z 1) = 1 + z2
(z 1)(z 1) = 1 2z+ z2
-
8/11/2019 Robsut Control Slides
86/139
-
8/11/2019 Robsut Control Slides
87/139
Stability hyper-spheres
Largest hyper-sphere around a nominally
stable polynomial
p(s) +n
i=0
qisi, q r
has radius
rmax= min{|p0|, |pn|, inf>0
(Rep(j))2
1 + w4 + w8..+
(Imp(j))2
w2 + w6 + ..
Example(2 + q0) + ( 1.4 + q1)s + (1.5 + q2)s2 + ( 1 + q3)s3, q r
1.15 1.152 1.154 1.156 1.158 1.16 1.162 1.164 1.166 1.168 1.171
1.2
1.4
1.6
1.8
2
2.2x 10
3
f()
rmax = min{2, 1, inf>0 f(w)}=1.08 103
-
8/11/2019 Robsut Control Slides
88/139
Stability ellipsoids
A weighted androtated hyper-sphere is
anellipsoid
We are interested in inner ellipsoidal
approximations of stability domains
E={p : (p p)P(p p)1}
where
p coef vector of polynomial p(s)p center of ellipsoidP positive definite matrix
-
8/11/2019 Robsut Control Slides
89/139
Hermite stability criterion
Charles Hermite (1822 Dieuze - 1901 Paris)
The polynomial p(s) =p0+ p1s + +pnsn is
stable if and only if
H(x) =
i
jpipjHij 0
where matrices Hij are given and depend onthe root clustering region only
Examples for n= 3:continuous-time stability
H(p) = 2p0p1 0 2p0p3
0 2p1p2 2p0p3 02p0p3 0 2p2p3
discrete-time stability
H(p) =
p23 p
20 p2p3 p0p1 p1p3 p0p2
p2p3 p0p1 p22+ p23 p
20 p
21 p2p3 p0p1
p1p3 p0p2 p2p3 p0p1 p23 p20
-
8/11/2019 Robsut Control Slides
90/139
Inner ellipsoidal appromixation
Our objective is then to findp andP such that
the ellipsoid
E={p: (p p)P(p p)1}
is a convex inner approximation of the actual
non-convex stability region
S={p:H(p)0}
that is to say
ES
Naturally, we will try to enlarge the volume of
the ellipsoid as much as we can
Using the Hermite matrix formulation, we can
derive (details omitted) a suboptimal
LMIformulation (not given here) with decision
variables p and P
-
8/11/2019 Robsut Control Slides
91/139
Stability ellipsoids
Example
Discrete-time second degree polynomial
p(z) =p0+ p1z+ z2
We solve the LMI problem and we obtain
P =
1.5625 0
0 1.2501
p=
0.2000
0
which describes an ellipse E inscribed in the
exact triangular stability domain S
1.5 1 0.5 0 0.5 1 1.52.5
2
1.5
1
0.5
0
0.5
1
1.5
2
2.5
p0
p1
-
8/11/2019 Robsut Control Slides
92/139
Stability ellipsoids
ExampleDiscrete-time third degree polynomial
p(z) =p0+ p1z+ p2z2 + z3
We solve the LMI problem and we obtain
P =
2.3378 0 0.53970 2.1368 0
0.5397 0 1.7552
x=
00.1235
0
which describes aconvexellipse E inscribed in the exactstability domain S delimited by the non-convexhyperbolic paraboloid
1
0
11
0 1
2 3
3
2
1
0
1
2
3
A
D
p1
Q
C
B
p0
p2
Very simple scalar convex sufficient stability condition
2.4166p20+ 2.2088p21+ 1.8143p
22 0.5458p1+ 1.1158p0p2 1
-
8/11/2019 Robsut Control Slides
93/139
-
8/11/2019 Robsut Control Slides
94/139
-
8/11/2019 Robsut Control Slides
95/139
Fixed-order robust design:
a difficult problem
In this last part of course, we study robust
stabilization with a fixed-order controller
affected by parametric uncertainty
A difficult problem in general because fixed-order controller means non-convexityof the design space
parametric uncertainty meanshighly structured uncertainty and exponential
(combinatorial) complexity
In the literature: a lot of analysis results,
but very few design results..
Low-order controllers are required in embedded devices
-
8/11/2019 Robsut Control Slides
96/139
Once more: uncertainty models
We can consider several uncertainty models, in
decreasing order of complexity:
Polytopic uncertainty, where plant (numer-ator and/or denominator) polynomial p(s) be-longs to a polytope with given vertices
Ex. p(s) =1(s + 1)3 + 2(s + 1)(s + 2)2 with 1+ 2 = 1
Very general, but often leads to intractable
analysis/design problems
Interval uncertainty, where each of the plantparameters are assumed to vary independently
in given intervalsEx. p(s) = 1 + [2, 3]s + [4, 1]s2 + s3
Leads to nice analysis results (Kharitonov)
but intractable design problems
Ellipsoidal uncertainty, also called rank-one(LFT), or norm-bounded
Ex. p(s) =p0+ p1s +p2s2 + s3 with 3p20+ p0p1+ 2p21+ p22 1Less structured, but more realistic, naturally arises in the context
of parameter estimation for process identification,
ellipsoid = covariance matrix
-
8/11/2019 Robsut Control Slides
97/139
Existing results
H design methods, state-space techniques Critical direction (Nyquist), convexoptimization with cutting-plane algorithms
Infinite-dimensional Youla-Kucera parametriza-tion generally leading to high-order controllers
Use of linear programming with polytopicsufficient conditions for stability
In this course
Use of polynomial techniques Use of LMIoptimization
Controllers offixed (hence low) order
-
8/11/2019 Robsut Control Slides
98/139
Nominal Pole placement
We consider the SISO feedback system
b
a
x
y
+
Closed-loop transfer function
bx
ax + byIn the absence of hidden modes (a and b coprime
polynomials),pole placementamounts to finding
polynomials x and y solving the Diophantine
equation (from Diophantus of Alexandria 200-284)
ax + by =c
where c is a given closed-loop characteristic
polynomial capturing the desired system poles
-
8/11/2019 Robsut Control Slides
99/139
Pole placement: numerical aspects
The polynomial Diophantine equation
ax + by =c
is linear in unknowns x and y, and denotinga(s) =a0+ a1s + + ada sdax(s) =x0+ x1s + + xdbxdb
etc..
we can identify powers of the indeterminate s to builda linear system of equations
a0 b0
a1. . . b1
. . .... a0
... b0ada a1 bdb b1
. . . ...
. . . ...
ada bdb
x0x1...
xdxy0y1...
ydy
=
c0c1...
cdc
The above matrix is called Sylvester matrix, it has aspecial Toeplitz banded structure that can be exploitedwhen solving the equation
James J Sylvester Otto Toeplitz(1814 London - 1897 London) (1881 Breslau - 1940 Jerusalem)
-
8/11/2019 Robsut Control Slides
100/139
Pole placement for MIMO systems
Pole placement can be performed similarly for
a plant left MFD
A1(s)B(s)
with a controller right MFD
Y(s)X1(s)
The Diophantine equation to be solved is now
over polynomial matrices
A(s)X(s) + B(s)Y(s) =C(s)
and right hand-side matrix C(s) captures
information on invariant polynomials and
eigenstructure
For example C(s) may contain H2 or Hoptimal dynamics (obtained with spectral
factorization)
-
8/11/2019 Robsut Control Slides
101/139
Robust pole placement
Now assume that the plant transfer function
b(q)
a(q)
contains some uncertain parameter q
The problem ofrobust pole placementwill thenconsists in finding a controller
y
xsuch that the uncertain closed-loop charact.
polynomial
a(q)x + b(q)y =c(q)
is robustly stable
How can we find x, y to ensure robust stability
of c(q) for all admissible uncertainty q ?
Coefficients of c are linear in x and y, but we
saw that stability conditions arenon-linearand
highly non-convex in c..
-
8/11/2019 Robsut Control Slides
102/139
Robust pole placement
One possible remedy is a suitable
Convex approximation ofthe stability region
Then we can perform design with
linear programming (polytopes) quadratic programming (spheres, ellipsoids) semidefinite programming (LMIs)
Complexity of design algorithm increases
Conservatism of control law decreases
-
8/11/2019 Robsut Control Slides
103/139
Robust design via polytopic approximation
MIMO plant with right MFD
B(s)A1(s) =
b 00 0
s + 1 0
0 s + 1
1with uncertainty in parameter
b [0.5, 1.5]We seek a proper first order controller
X1(s)Y(s) = s + x1 x2
0 1 1
= y1s + y2 y3s + y4
0 y5 assigning robustly the closed-loop polynomial matrixC(s) =
s2 + s + (s)
0 s +
whose coefficients live in the polytope
14 1 016 2 02 1 0
0 0 10 0 1
>
196564
214
These specifications amounts to assigning the poles within the disk|s + 8|
-
8/11/2019 Robsut Control Slides
104/139
Robust design via polytopic approximation (2)
Equating powers of indeterminate s in the polynomialmatrix Diophantine equation
X(s)A(s) + Y(s)B(s) =C(s)
we obtain the design inequalities
13 7 0.514 8 11 1 0.5
13
21 1.5
14 24 31 3 1.5
x1y1
y2 >
182402
182402
characterizing all parameters x1, y1 and y2 of admissiblerobust controllers
5
0
5
10
15
20
10
0
10
20
30
0
50
100
150
200
250
300
350
400
y1
x1
y2
Corresponding polytope with 9 vertices
-
8/11/2019 Robsut Control Slides
105/139
Robust design via ellipsoidal approximation
Closed-loop characteristic polynomial
c(s) = a(s)x(s) + b(s)y(s)
= c0+ c1s + + cd1sd1 + sdwhose coefficients are given by the LSE
c0c1...cd1
=
y0 x0
y1.
. . x1.
. .... y0... x0
ym1 y1 xm1 x1ym
... 1 ...
. . .ym1. . .xm1
ym 1
b0b
1...bn1
a0a1...
an1
+
00...0
x0x1...
xm1
c=S(x, y)p + e(x)
It is assumed that uncertain plant parameters belong totheellipsoid
Ep = {p : (p p)P(p p) 1}where p is a givennominalplant vector and P is a givenpositive definite covariance matrix
Robust control problem:
Find controller coefficients x, yrobustly stabilizing plant a, b subject toellipsoidal uncertainty p Ep
-
8/11/2019 Robsut Control Slides
106/139
-
8/11/2019 Robsut Control Slides
107/139
Ellipsoidal robust design: example
We consider the two mixing tanks arranged in
cascade with recycle stream
P
Fa
Fa Fb
Fa+FbTa
Tb
The controller must be designed to maintain
the temperature Tb of the second tank at a
desired set point by manipulating the power P
delivered by the heater located in the first tank
The only available measurement is
temperature Tb
-
8/11/2019 Robsut Control Slides
108/139
Ellipsoidal robust design: example (2)
The identification of the nominal plant model
is carried out using a standard least-squares
method
A second-order discrete-time model
p(z) = b0+ b1za0+ a1z+ z2
is obtained with nominal plant vector
p=
0.0038 0.0028 0.2087 1.1871
The positive definite matrix P characterizingthe uncertainty ellipsoid
Ep = {p : (p p)P(p p) 1}is readily available as a by-product of the
identification technique
P = 105
2.4179 0.0568 0.0069 00.0568 2.4121 0.0045 0.00620.0069 0.0045 0.0015 0.0014
0 0.0062 0.0014 0.0015
-
8/11/2019 Robsut Control Slides
109/139
Ellipsoidal robust design: example (3)
Solving the LMI analysis problem we obtain first aninner ellipsoidal approximation
Eq = {q : (q q)Q(q q) 1}of the non-convex stability region, with
Q= 2.3378 0 0.5397
0 2.1368 00.5397 0 1.7552 q =
0
0.12350
Then we solve the design LMI to obtainthe first-order robustly stabilizing controller
y(z)x(z)
= 0.3377+166.0z0.6212+z
Robust closed-loop root-locus forrandom admissible ellipsoidal uncertainty
-
8/11/2019 Robsut Control Slides
110/139
Strict positive realness
Let
D = {s :
1s
a bb c
H
1s
-
8/11/2019 Robsut Control Slides
111/139
Stability and strict positive realness
Consider two square polynomial matrices of
size n and degree d
N(s) = N0+ N1s + + NdsdD(s) = D0+ D1s + + Ddsd
Polynomial matrix N(s) is stable iff there is astable polynomial D(s) such that rational
matrix N(s)D1(s) is strictly positive real
Proof
From the definition of SPRness, N(s)D1(s)SPR with D(s) stable implies N(s) stable
Conversely, if N(s) is stable then the choice
D(s) =N(s) makes rational matrix
N(s)D1
(s) =I obviously SPR
It turns out that this condition can be
characterized by an LMI..
-
8/11/2019 Robsut Control Slides
112/139
-
8/11/2019 Robsut Control Slides
113/139
LMI condition for design
Given a stable polynomial matrix D(s), poly-
nomial matrixN(s) is stable if there is a matrix
P satisfying the LMI
DN+ ND
H(P)
0
(it follows then that P 0)
New convex inner approximationof stability domain
Shape described by an LMI
Depends on the particular choice of D(s) More general than polytopes and ellipsoids
Useful for design because linear in N
Polynomial D(s) will be referred to as the
central polynomial
-
8/11/2019 Robsut Control Slides
114/139
LMI condition for analysis
The LMI condition of SPRness can be used
also for design if we interchange the respective
roles played by N(s) and D(s)
If there is a matrix P and a polynomial matrix
D(s) satisfying the LMI
DN+ ND H(P) 0P 0
then polynomial matrix N(s) is stable
(it follows that D(s) is stable as well)
Useful for (robust)analysisbecause linear in D
Note that, in contrast with the design LMI, we
have here to enforce P 0
-
8/11/2019 Robsut Control Slides
115/139
Second-degree discrete-time polynomial
Consider the discrete polynomial
n(z) =n0+ n1z+ z2
We will study the shape of the LMI stability
region for the following central polynomial
d(z) =z2
We can show that non-strict feasibility of the
LMI is equivalent to existence of a matrix Psatisfying
p00+ p11+ p22 = 1p10+ p01+ p21+ p22 = n1
p20+ p02 = n0P
0
which is an LMI in the primal SDP form
-
8/11/2019 Robsut Control Slides
116/139
Second-degree discrete-time polynomial (2)
Infeasibility of primal LMI is equivalent to the
existence of a vector satisfying the dual LMI
y0+ n1y1+ n0y20 0 i 1
-
8/11/2019 Robsut Control Slides
117/139
Second-degree discrete-time polynomial (3)
The implicit equation of the envelope is
(2n0 1)2 + (
2
2 n1)
2 = 1
a scaled circle
The LMI stability region is then the union ofthe interior of the circle with the interior of the
triangle delimited by the two lines
n0 n1+ 1 = 0tangent to the circle, with vertices [
1, 0],
[1/3, 4/3] and [1/3,4/3]
1 0.8 0.6 0.4 0.2 0 0.2 0.4 0.6 0.8 1
2
1.5
1
0.5
0
0.5
1
1.5
2
p0
p1
-
8/11/2019 Robsut Control Slides
118/139
Application to robust stability analysis
Assume that N(s, ) is a polynomial matrix
with multi-linear dependence in a parameter
vector belonging to a polytope
Denote by Ni(s) the vertices obtained by
enumerating each vertex in
Polytopic polynomial matrix N(s, ) isrobustly
stable if there exists a matrix D and matrices
Pi satisfying the LMI
DNi+ NiD H(Pi) 0
Pi 0 iProof
Since the LMI is linear in D - matrix of coefficientsof polynomial matrix D(s) - it is enough to check thevertices to prove stability in the whole polytope
-
8/11/2019 Robsut Control Slides
119/139
Robust stability of polynomial matricesExample
Consider the following mechanical system
x
x
u
m
m
d
d
2
1 2
1
2
1c1
c12
c2
It is described by the polynomial MFDm1s2 + d1s + c1+ c12 c12
c12 m2s2 + d2s + c2+ c12
x1(s)x2(s)
=
0
u(s)
System parameters = [ m1 d1 c1 m2 d2 c2]belong to the uncertainty hyper-rectangle = [1, 3] [0.5, 2] [1, 2] [2, 5] [0.5, 2] [2, 4]and we set c12 = 1
This mechanical system is passive so it must be open-loop stable (when u(s) = 0) independently of the valuesof the masses, springs, and dampers
-
8/11/2019 Robsut Control Slides
120/139
-
8/11/2019 Robsut Control Slides
121/139
Polytope of polynomials
We can also check robust stability ofpolytopes
of polynomialswithout using the edge theorem
or the graphical value set
Example
Continuous-time polytope of degree 3 with 3 vertices
n1(s) = 28.3820 + 34.7667s + 8.3273s2 + s3
n2(s) = 0.2985 + 1.6491s + 2.6567s2 + s3
n3(s) = 4.0421 + 9.3039s + 5.5741s2 + s3
The LMI problem is feasible, so the polytope is robustlystable see robust root locus below
4 3.5 3 2.5 2 1.5 1 0.5 04
3
2
1
0
1
2
3
4
Real
-
8/11/2019 Robsut Control Slides
122/139
Interval polynomial matrices
Similarly, we can assess robust stability of intervalpolynomial matrices, a difficult problem in general
Example
Continuous-time interval polynomial matrix of degree 2with 23 = 8 vertices
[7.7 2.3s + 4.3s2,
3.7 + 2.7s + 4.3s
2
]
[3.1 6s 2.2s2,4.1 7s 2.2s
2
]3.6 + 6.4s + 4.3s2
[3.2 + 1 1s + 8.2s2,16 + 12s + 8.2s2]
LMI is feasible so the matrix is robustly stableSee robust root locus below
-
8/11/2019 Robsut Control Slides
123/139
State-space systems
One advantage of our approach is that state-
space results can be obtained as simple by-
products, since stability of a constant matrix
A is equivalent to stability of the pencil matrix
N(s) =sI A
Matrix A is stable iff there exists a matrix F
and a matrix P solving the LMI
FA + AF aP A F bPA F bP 2I cP 0P 0
Proof
Just take D(s) = sI F and notice that theLMI can be also written more explicitly asF
I
A I
+
A
I
F I
aP bPbP cP
>0
-
8/11/2019 Robsut Control Slides
124/139
Robust stability of state-space systems
We recover the LMI stability conditionsobtained by Geromel and de Oliveira in 1999
Nice decoupling between Lyapunov matrix Pand additional variable F allows for construc-tion of parameter-dependent Lyapunov matrix
Assume that uncertain matrix A() has multi-linear dependence on polytopic uncertain pa-rameter and denote by Ai the correspondingvertices
Matrix A() is robustly stable if there exists amatrix F and matrices Pi solving the LMI
FAi+ A
i F aPi Ai F bPi
Ai F bPi 2I cPi
0
Pi 0 i
Proof
Consider the parameter-dependent Lyapunovmatrix P() built from vertices Pi
-
8/11/2019 Robsut Control Slides
125/139
Robust design
Assume now that system matrix C(s, ) comes
from a polynomial Diophantine equation
C(s, ) =A(s, )X(s) + B(s, )Y(s)
where system matrices A and B are subject to
multi-linear polytopic uncertainty
In order to ensure robust SPRness of the ra-
tional matrix D1(s)C(s, ) central polynomialD(s) must becloseto the nominal closed-loop
matrix, such as
D(s) =C(s, 0)
where 0 is the nominal parameter vector
A sensible simple choice of D(s) is thereforethe nominal closed-loop denominator polyno-
mial matrix, obtained by any standard design
method (pole assignment, LQ, H)
-
8/11/2019 Robsut Control Slides
126/139
Reactor
Consider the stirred tank reactor model described bynon-linear state-space equations
1 = (2+ 0.5)exp(E1/(1+ 2)) (2 + u)(1+ 0.25)2 = 0.5 2 (2+ 0.5)exp(E1/(1+ 2))
where E is a parameter related to the activation energy
During the life of the reactor, some representative valuesof E are 20, 25 and 30
Using only 1 for feedback we obtain a polytopic systemwith 3 linearized vertex transfer functions
b1(s)/a1(s) = (0.5
0.25s)/(11
5s + s2)
b2(s)/a2(s) = (0.5 0.25s)/(2.25 2.25s + s2)b3(s)/a3(s) = (0.5 0.25s)/(3.5 3.5s + s2).
Our objective is to stabilize the whole polytopic systemwith asingle static output feedback controller y(s)/x(s)
-
8/11/2019 Robsut Control Slides
127/139
Reactor
For the choice
d(s) = (s + 1)2
as a central polynomial, solving the LMI yields therobustly stabilizing controller
y(s)/x(s) =k = 21.4409
With the eigenvalue criterion we can check that k issimultaneous stabilizing iff
22< k < 20Note however that the problem solved here is moredifficult since we must stabilize the whole polytope,not only its vertices
Edges of root locus
-
8/11/2019 Robsut Control Slides
128/139
Oblique wing aircraft
We consider the model of an experimental oblique wingaircraft
The linearized transfer function
[90, 166] + [54, 74]s
[0.1, 0.1] + [30.1, 33.9]s + [50.4, 80.8]s2 + [2.8, 4.6]s3 + s4
features 6 uncertain parameters, and must be stabilizedwith a PI controller
y(s)
x(s)=Kp+
Ki
s
One can check easily that the choice Kp = 1 and Ki = 1stabilizes the vertex plant
9 0 + 5 4s
0.1 + 3 0s + 50s2 + 2.8s3 + s4
-
8/11/2019 Robsut Control Slides
129/139
Oblique wing aircraft (2)
With the choice
d(s) =sa1(s) + ( 1 + s)b1(s)
as the central polynomial, the LMI problem is infeasible
But when considering another vertex plant
b2(s)
a2(s)
= 9 0 + 5 4s
0.1 + 3 0s + 50s2
+ 4.6s3
+ s4
the choice
d(s) =sa2(s) + ( 1 + s)b2(s)
now proves successful, the LMI is solved and we obtainthe robustly stabilizing PI controller
y(s)
x(s)= 0.8634 +
0.6454
s
-
8/11/2019 Robsut Control Slides
130/139
Satellite
We consider asatellitecontrol problem where the satel-lite model is two masses with the same inertia connectedby a spring with torque constant q1 and viscous dampingconstant q2
The transfer function between the control torque andthe satellite angle is given by
b(s, q)
a(s, q)=
q1+ q2s + s2
s2(2q1+ 2q2s + s2)
where uncertain parameters are assumed to vary withinthe bounds
q1 [0.09, 4], q2 [0.04q110, 0.2q210]With the choice
d(s) = (s + 1)6
as a central polynomial, the LMI design method cannotstabilize the whole polytope
-
8/11/2019 Robsut Control Slides
131/139
Satellite (2)
However we can stabilize each vertex ai(s), bi(s)individuallywith controller polynomials xi(s), yi(s)
The roots of the corresponding closed-loop polynomialsci(s) =ai(s)xi(s) + bi(s)yi(s) are given below
i roots of ci(s)1 0.4520j1.8129,0.0365j0.8954,0.0019 j0.25332 0.6161j1.3829,0.2190j0.6745,0.0237 j0.21363 1.0484,0.0917 j2.1598,0.0425 j0.5019,0.00044 0.2220j2.0695,0.1695j0.5354,0.0709 j0.0045
The third vertex has polesnearest to the imaginary axis,and with the choice
d(s) =c3(s)
as a central polynomial, the LMI is found feasible andwe obtain the robustly stabilizing controller
y(s)
x(s)=
0.0181 + 0.0170s 1.4048s23.6082 + 1.0237s + s2
Sometimes it can be tricky to be find the central poly-nomial (provided one exists = the system is robustlystabilizable)..
-
8/11/2019 Robsut Control Slides
132/139
Robot
We consider the problem of designing a robust controllerfor the approximate ARMAX model of a PUMA roboticdisk grinding process
From the results of identification and because of the
nonlinearity of the robot, the coefficients of the numer-ator of the plant transfer function change for differentpositions of the robot arm. We consider variations ofup to 20% around the nominal value of the parameters
The fourth-order discrete-time model is given by
b(z1, q)
a(z1, q) = (0.0257 + q1) + (0.0764 + q2)z1
+(
0.1619 + q3)z2 + (
0.1688 + q4)z3 1 1.914z1 + 1.779z2 1.0265z3 + 0.2508z4
where
|q1| 0.00514, |q2| 0.01528, |q3| 0.03238, |q4| 0.03376
-
8/11/2019 Robsut Control Slides
133/139
Robot
Closed-loop polynomial
d(z, q) =z12[(1z1)a(z1, q)x(z1)+z5b(z1, q)y(z1)]where the term 1 z1 is introduced in the controllerdenominator to maintain the steady state error to zerowhen parameters are changed
With the input central polynomial d(z) = z19 the LMI
returns the seventh-order robust controller
y(z1)x(z1)
=
0.2863 + 0.2928z1 + 0.0221z20.1558z3 + 0.0809z4 + 0.1420z5
0.1254z6 + 0.0281z7
1 + 1.1590z1 + 0.9428z2+0.4996z3 + 0.3044z4 + 0.4881z5
+0.4003z6 + 0.3660z7
-
8/11/2019 Robsut Control Slides
134/139
Second-order systems
Second-order linear system
(A0+ A1s + A2s2)x = Bu
y = Cx
to be controlled by PD output-feedback
controller
u= (F0+ F1s)yApplications: large flexible space structures, earthquake engineer-
ing, mechanical multi-body systems, damped gyroscopic systems,
robotics control, vibration in structural dynamics, flows in fluid me-
chanics, electrical circuits
320m long Millenium footbridge over river Thames in London
-
8/11/2019 Robsut Control Slides
135/139
PD controller
Closed-loop system behavior captured by zeros
of quadratic polynomial matrix
N(s) = (A0+ BF0C) + (A1+ BF1C)s + A2s2
Zeros ofN(s) must be located in somestability
region
D characterized as before by matrix H
Uncertainty can affect A0 (stiffness)
A1 (damping) and A2 (mass)
Given A0, A1, A2, B, C
find F0, F1ensuring robust pole placement
-
8/11/2019 Robsut Control Slides
136/139
Robust LMI stability condition
Norm-bounded (unstructured) uncertaintyN(s) + M(s) max()
LMI robust stability condition on N(s)
DN+ ND H(P) DD M
M I
0
Polytopic (structured) uncertaintyN(s) =
i
iNi(s) i
i = 1 i 0
Vertex LMI robust stability conditions:
DNi + (Ni)D
H(Pi)
0, i= 1, 2, . . .
Parameter-dependent Lyapunov matrix
P() =
i iPi
-
8/11/2019 Robsut Control Slides
137/139
Robust design
Once central polynomial matrix D(s) is fixed,
robust stability condition is LMI in N(s), so
extension to design is straightforward
Easy incorporation of structural constraints
on controller coefficient matrices F0, F1:
minimization of 2-norm (SOCP) enforcing some entries to zero (LP)
maximization of uncertainty radius (SDP)
Key point is choice ofcentral polynomial matrix
Good policy: set D(s) to some nominal sys-
tem matrix obtained by some standard designmethod (pole placement, LQ,H2 orH), thentry to optimize around D(s)
-
8/11/2019 Robsut Control Slides
138/139
Example: five masses
Five masses linked by elastic springscontrolled by two external forces
1
2
3
4
5
A0 =
2.565 1.080 0 0 1.0890.6038 0.8206 0.4766 0 0
0 0.6009 1.504 0.4808 00 0 0.4300 1.114 0.5131
0.6190 0 0 0.4626 0.8352
B =
0 1.9640 00 00 0
1.116 0
A1 = 05A2=I5C=I5
Purely imaginary open-loop poles i1.783, i1.380, i1.145i0.5675 andi0.3507Nominal PD controller F00 , F
01 obtained with LQ design
Resulting central polynomial matrix
D(s) = (A0+ BF00 C) + (A1+ BF0
1 C)s + A2s2
Stability regionD = {s: Re s < 0.1}
-
8/11/2019 Robsut Control Slides
139/139
Five mass example (2)
Minimizing the norm of feedback matrices F0,
F1 over the design LMI yields
[F0 F1] =0.7537< [F00 F01 ] = 1.462