
ROBOTICS - Motoman · Asegúrese de que nadie esté en el área máxima de trabajo del robot....
96
ROBOTICS MH400II YR-MH00400-J00 Manual de funcionamiento y mantenimiento Número de parte: 177179-1CD Revisión: 0
Transcript of ROBOTICS - Motoman · Asegúrese de que nadie esté en el área máxima de trabajo del robot....

ROBOTICS
MH400IIYR-MH00400-J00
Manual de funcionamiento y mantenimiento
Número de parte: 177179-1CDRevisión: 0

© Copyright 2015Estos documentos no deben ser reproducidos total ni parcialmente ni puesto a la disposición deterceros sin el consentimiento expreso de YASKAWA Europe "Robotics Division GmbH".Hemos revisado el contenido del documento respecto a la concordancia con el hardware ahí descrito.No obstante no podemos excluir divergencias y no respondemos por lo tanto por la integridad de laconcordancia. Revisamos, sin embargo, con regularidad los datos contenidos en este documento y lascorrecciones necesarias estarán incluidas en la próxima edición.Nos reservamos el derecho a efectuar modificaciones técnicas.
Elaborado el: 2015-11Versio: 04Número del docu-mento:
E1101000214ES04 Autor: WOE
Modificaciones de la revisión:Versión 01: Revisión del HW1482881.1 original en estilo YEU (2015-03)Versión 02: Revisión del capítulo "Indicaciones para rellenar grasa" (2015-08).Versión 03: Revisión del capítulo "Lista de piezas" por original HW1482881.2 (2015-08)Versión 04: Revisión del capítulo "Cable y conducción de aire comprimido incorporados" y "iezas de repuesto recomendadas" (DX200 Versión 1.5 01.05.2015)

Índice
Índice
1 Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1 Indicaciones para un funcionamiento seguro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Términos usados con frecuencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Grupo destinatario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Uso reglamentario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.5 Uso no reglamentario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.6 Información acerca del presente manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.7 Seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.8 Fabricante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.9 Representante autorizado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Entrega. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.1 Inspeccione los artículos incluidos en la entrega . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.2 Posición de la placa de características . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3 Transporte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.1 Métodos de transporte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.1 Transporte con una grúa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.1.2 Transporte con una carretilla elevadora de horquilla . . . . . . . . . . . . . . . . . . . . . 16
3.2 Dispositivos de seguridad y tornillos de transporte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4 Instalación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184.1 Medidas protección. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184.2 Condiciones ambientales y ubicación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.3 Ejemplo de montaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5 Cableado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245.1 Puesta a tierra. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245.2 Conexión de cable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.2.1 Conexión del robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.2.2 Conexión del mando robótico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.2.3 Conexión del programador portátil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
6 Datos técnicos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296.1 Denominación de las piezas y de los ejes de trabajo . . . . . . . . . . . . . . . . . . . . . . . . . . . 306.2 Dimensión de la base del robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306.3 Dimensiones y área definida de trabajo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316.4 Área de trabajo regulable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326.5 Recorrido y tiempo de marcha por inercia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
6.5.1 Categoría de parada 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 346.5.2 Categoría de parada 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
7 Carga fiable para el eje manual y la brida de muñeca. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 387.1 Brida de muñeca. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 387.2 Carga de muñeca fiable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
8 Cable interior y boquillas de paso de aire comprimido . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
9 Mantenimiento y control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3

Índice
9.1 Calendario de inspecciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 479.2 Indicación para la unidad de baterías . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
9.2.1 Cambie la unidad de baterías. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 529.2.2 Enchufe de la unidad de baterías (con etiqueta de advertencia) . . . . . . . . . . . . 54
9.3 Recomendación para el mantenimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 559.4 Indicaciones para rellenar grasa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
9.4.1 Relleno y cambio de grasa de los ejes principales. . . . . . . . . . . . . . . . . . . . . . . 589.4.2 Relleno y cambio de grasa de los ejes manuales . . . . . . . . . . . . . . . . . . . . . . . 599.4.3 Relleno de grasa en las articulaciones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 609.4.4 Relleno y cambio de grasa del cilindro de compensación . . . . . . . . . . . . . . . . . 60
9.5 Ajustar la primera posición cero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 619.5.1 Registrar todos los ejes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 629.5.2 Registrar ejes individuales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 659.5.3 Cambio de datos absolutos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 669.5.4 Borradura de datos absolutos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
9.6 Ajustar la segunda posición cero (punto de chequeo).. . . . . . . . . . . . . . . . . . . . . . . . . . 689.6.1 Objetivo de la comprobación de posición. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 689.6.2 Procedimiento para configurar la segunda posición cero. . . . . . . . . . . . . . . . . . 709.6.3 Procedimiento después de una alarma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
10 Piezas de repuesto recomendadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
11 Lista de piezas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7511.1 Accionamiento de ejes S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7511.2 Accionamiento de ejes L. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7811.3 Eje U Accionamiento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8111.4 Accionamiento de los ejes R, B y T . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8411.5 Eje R Accionamiento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8611.6 Unidad de muñeca . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8811.7 Cilindro de compensación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9211.8 Unidad articulación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
4

Generalidades
1 Generalidades
1.1 Indicaciones para un funcionamiento seguro
PELIGRO!Indica un peligro inmediato de alto riesgo que puede tener como consecuencia la muerteo lesiones corporales graves si no se evita.
ADVERTENCIA!Indica un peligro posible de riesgo medio que puede tener como consecuencia la muerteo lesiones corporales graves si éste no se evita.
ATENCIÓN!Indica una situación peligrosa de bajo riesgo que puede tener como consecuencia lesionescorporales leves o medias si ésta no se evita. Esta señal se usa también para advertir laposibilidad de que ocurran daños materiales.
INDICACIÓNDestaca informaciones básicas importantes y recomendaciones para el uso.
1.2 Términos usados con frecuencia
El robot de YASKAWA es un producto de YASKAWA Electric Corporation y se despachaestandarizadamente con el mando robótico, el programador portátil y el cable del robot.Los términos contenidos en este manual se denominan de la manera siguiente:
Término DenominaciónMando Control del robotRobot industrial RobotProgramador portátil / Teachbox Programador portátilCable situado entre el robot y el mando CableRobot, mando y cable Sistema robóticoYASKAWA Electric Corporation YECYASKAWA Robotics Division YEU-RMover, calibrar y ajustar el robot Teachen (enseñanza)Secuencias de los movimientos robóticos TareasServicio técnico para el cliente TCS
1 - 5

Generalidades
1.3 Grupo destinatario
Este manual concierne a usuarios que tengan los conocimientos siguientes:• Conocimientos avanzados en cuanto a la ingeniería mecánica• Conocimientos avanzados en cuanto a la electrotécnica• Conocimientos del sistema del mando robótico• Personal con instrucción especial
INDICACIÓNLos operarios de un sistema robótico tienen que recibir la formación correspondiente antesde manejarlo según lo dispuesto en la norma internacional DIN EN ISO 10218-1.Recomendamos a nuestros clientes que asistan a los cursos de formación de la YASKAWAAcademy a fin de puedan emplear óptimamente nuestros productos. Para obtener másinformación sobre el programa de formación visite www.yaskawa.eu.com o diríjase a sufilial de YASKAWA.
1.4 Uso reglamentario
Uso típico:• Embridamiento de herramientas• Montaje de pinzas para soldar por puntos• Montaje de equipamiento para soldadura de arco voltaico• Montaje de mordazas• Mecanización y transporte de piezas de trabajo o productos
1 - 6

Generalidades
1.5 Uso no reglamentario
Todos los usos que diverjan de las aplicaciones reglamentarias son considerados comoinadmisibles, entre otros:• Transportar personas y animales.• Usarlo como ayuda para subir.• Usarlo fuera de los límites permitidos de funcionamiento.• Usarlo en entornos expuestos a explosión (salvo los robots ATEX autorizados).• Sobrecargarlo• Usarlo sin dispositivos protectores.
INDICACIÓNModificar el robot, p.ej., hacer perforaciones o cosas similares pueden dañar loscomponentes. Lo antedicho será considerado como uso indebido y extinguirá la garantía,los derechos a exigir responsabilidad y la declaración de incorporación.
ATENCIÓN!El sistema robótico es una máquina incompleta.Este sistema puede ser usado tan pronto esté comprobado que la máquina incompleta ocompleta esté instalada en dicho sistema: Correspondiendo a las disposiciones de la directiva de máquinas. Correspondiendo a todas las normas relevantes (armonizadas). Correspondiendo al nivel de la técnica.
1 - 7

Generalidades
1.6 Información acerca del presente manual
• En este manual se describen principalmente la mecánica del robot para la aplicación,el mantenimiento y la inspección reglamentarios. Contiene información relativa a laseguridad y a la manipulación, especificaciones técnicas, los recursos necesarios paralos trabajos de mantenimiento y control, así como instrucciones para la operación ymantenimiento. Lea este manual cuidadosamente y familarícese con su contenidoantes de instalar y poner en servicio el robot.
• Lea el manual de instrucciones del mando robótico (información fundamental,instalación, cableado y configuración del sistema) a fin de garantizar el funcionamientocorrecto y seguro de la máquina.
• Para ilustrar mejor los detalles, se incluyen algunos dibujos en los que se muestran losdispositivos sin las cubiertas o los revestimientos protectores. Es necesario montarsiempre todas las cubiertas y los revestimientos protectores antes de poner la máquinaen funcionamiento.
• Los dibujos e imágenes de este manual son ilustraciones representativas. Por esemotivo puede haber diferencias respecto al producto despachado.
• YEU-R se reserva el derecho a efectuar modificaciones. Estas modificaciones puedenabarcar especificaciones, modificaciones o mejoras en el producto.
• En caso de pérdida o deterioro de su manual de funcionamiento y mantenimiento,póngase en contacto con la filial de YASKAWA de su domicilio para solicitar una nuevacopia. Las filiales oficiales están mencionadas en la última página. Cuando haga elpedido, incluya el número de referencia del manual.
• YASKAWA Europe GmbH no se responsabiliza de los daños provocados por unamodificación no autorizada del equipo. Cuando se hagan modificaciones prohibidas enel equipo o en el robot, se extinguirán inmediatamente todos los derechos de garantíay de deferencia.
1 - 8

Generalidades
1.7 Seguridad
Fig. 1-1: Programador portátil
ADVERTENCIA!Muerte o lesiones por aplastamientoEl robot no puede parar en un caso imprevisto si el botón de parada de emergencia nofunciona. El robot no se debe manejar si el botón de parada de emergencia no funciona. Compruebe el funcionamiento del botón de parada de emergencia antes de manejar el
robot. La SERVO-tensión tiene que suprimirse en el acto al pulsar el botón de paradade emergencia (lea Fig. 1-3: "Botón de parada de emergencia").
El LED "SERVO ON" se apaga en el programador portátil al desconectar la SERVO-tensión (lea Fig. 1-2: "LED SERVO ON").
Fig. 1-2: LED SERVO ON
Fig. 1-3: Botón de parada de emergencia
Botón de parada de emergencia
1
Short CutMain Menu
JOB CONTENT
000000010002000300040005000600070008000900100011
TEST01TOOL:CONTROL GROUP:R1S:0000
NOPSET B000 1SET B001 0MOVJ VJ=80.00MOVJ VJ=80.00DOUT OT#(10) ONTIMER T=3.00MOVJ VJ=80.00MOVJ VJ=100.00MOVJ VJ=100.00MOVJ VJ=100.00MOVJ VJ=100.00
Turn on servo power
JOB EDIT DISPLAY UTILITY
MOVJ VJ=0.78
S-
SELECT
X-S+
X+
L-Y-
L+Y+
U-Z-
U+Z+
R-X-
R+X+
B-Y-
B+Y+
T-Z-
T+Z+
TEACHPLAY
REMOTESTART HOLD
SLOW8- 8+
.
2
FAST
TESTSTART
HIGHSPEED
BWD FWD
INTERLOCK
WELDON/OFF
ASSIST
SERVO ON
CANCELSERVO
ONREADY
MAINMENU
AREAPAGE
GO BACKDIRECTOPEN
TOOL SEL
COORDMulti
LAYOUT
Multi
MANUAL SPEED
TOOL SELLAYOUT
ENTRYENTRY
DELETE
MODIFY
SHIFT
ENTER
INSERT
9
6
3
-.
2
5
87
4
1
0MOTIONTYPE
INFORMLIST
ROBOT
EX.AXIS
AUX
MAINMENU
SIMPLEMENU
SIMPLEMENU
COORD
SERVOON
READY
PAGE AREA
CANCEL
DIRECTOPEN
GO BACK
SERVO ON
SHIFT
E- E+
1
SERVO ONSERVO ONSERVO ON
1 - 9

Generalidades
ADVERTENCIA!Muerte o lesiones por aplastamientoAntes de desbloquear el botón de parada de emergencia (lea Fig. 1-4: "Desbloquee elpulsador de parada de emergencia al girarlo"), tome en consideración lo siguiente: Asegúrese de que nadie esté en el área máxima de trabajo del robot. Retire antes todos los objetos que estén en la celda con los que el robot pueda chocar. Conecte después la SERVO-tensión pulsando el botón de confirmación del
programador portátil.
Fig. 1-4: Desbloquee el pulsador de parada de emergencia al girarlo
ADVERTENCIA!Muerte o lesiones por aplastamientoPulse siempre de inmediato el botón de parada de emergencia si alguien accede al áreade trabajo del robot mientras esté funcionando o cuando se presenten problemas. Estebotón se halla en el programador portátil (lea Fig. 1-1: "Programador portátil").Tenga en cuenta las siguientes reglas de precaución cuando programe tareas dentro de lazona de trabajo del robot: En lo posible, sitúese siempre de forma que pueda observar el robot desde adelante. Efectúe los pasos de manejo especificados (lea las instrucciones concernientes al
mando robótico y el manual "Manejo" o "Aplicación universal"). Hay que procurar que exista suficiente espacio libre al que pueda retirarse el operario
en un caso de emergencia.
Efectúe los pasos de prueba mencionados más adelante antes de que imparta"enseñanza" al robot. Elimine de inmediato todo defecto detectado y cerciórese de quehayan sido ejecutadas todas las demás medidas necesarias.• Compruebe si existen dificultades con el movimiento del robot.• Fíjese si el enchufe está bien asentado y si todos cables están en buen estado.• Después de haber usado el programador portátil, vuelva a colgarlo en el mando
robótico.• Asegúrese de que la llave del interruptor de modos de funcionamiento (Teach/
Automático) del programador portátil sea custodiado por una persona competente yformada especialmente por nosotros.
• La llave debe estar introducida en el interruptor del programador portátil sólo durantela "enseñanza" y hay que extraerla después inmediatamente y guardarla en un lugarseguro.
1 - 10

Generalidades
1.8 Fabricante
Dirección:YASKAWA ELECTRIC CORPORATION2-1 KUROSAKISHIROISHIYAHATANISHI-KUKITAKYUSHUJAPAN
1.9 Representante autorizado
Dirección:YASKAWA EUROPE GMBHRobotics DivisionYaskawastr. 185391 AllershausenAlemania
1 - 11

Entrega
2 Entrega
2.1 Inspeccione los artículos incluidos en la entrega
La entrega estándar contiene las posiciones siguientes:
Fig. 2-1: Artículos incluidos en la entrega
Programador portátil El presente manual de montajeControl del robot CableRobot
MOTOMAN MANUAL
1 2
3
54
DX
200
1 4
2 53
2 - 12
Entrega
2.2 Posición de la placa de características
Revise los números seriales del robot, del mando y del programador portátil y compáreloscon los datos de la boleta de entrega. Los números de seriales están indicados en lasplacas de características así como aparece a continuación.
Fig. 2-2: Posición de la placa de características
INDICACIÓNPóngase en contacto con la filial de YASKAWA de su domicilio si los números serialesdifieren de los indicados en la boleta de entrega.
S/N. ��������
DX
200
YASAKAW DX200Part No.Power Supply Peak kVAAC 400/415/440 Average kVASerial No.Date/SignatureType ERDR-Robot TypeRobot Order No.Robot Serial No.
YASKAWA ELECTRIC CORPORATION2-1 SHIROISHI KUROSAKI, YAHATANISHILU KITAKYUSYU, JAPAN
YASKAWA Europe �Robotics Division� GmbHYaskawastr. 1, D-85391 Allershausen
2 - 13

Transporte
3 Transporte
ATENCIÓN!Lesiones personales o daños materialesEl sistema está formado por componentes de precisión. La potencia puede perjudicarse sino se acata esta medida de precaución. Las grúas y las carretas de horquilla sólo deben ser manejadas por el personal
autorizado. Lo mismo vale para hacer bucles. Evite golpes y vibraciones fuertes durante el transporte. No deben aplicarse fuerzas externas en el control del robot, en el robot o en otros
componentes.
3.1 Métodos de transporte
ATENCIÓN!Lesiones y daños materiales causados por fuerzas externas No deben aplicarse fuerzas externas en el robot o los motores.
• Compruebe si los tornillos de cáncamo están fijados de forma segura.• El robot pesa unos 2700 kg. Utilice un medio de suspensión de carga con suficiente
capacidad portante.• Las sujeciones afianzan el robot; úselas exclusivamente para transportar el robot.• Monte los dispositivos de seguridad y los tornillos de transporte cuando deba
transportar el robot.
3 - 14

Transporte
3.1.1 Transporte con una grúa
Hay que usar medios suficientes de suspensión de carga para transportar el robot.Asegúrese de que el robot sea alzado de acuerdo con la ilustración "Transporte con grúa".
Fig. 3-1: Transporte con grúa
Armella para transporte Zapato de transporteDispositivo de seguridad para el transporte
C
A
B
E
D
3
21
1 32
3 - 15

Transporte
3.1.2 Transporte con una carretilla elevadora de horquilla
Hay que fijar el robot en una paleta con aseguramientos y tornillos si es necesariotransportarlo con una carretilla de horquilla. La manera de fijarlo está ilustrada en la figura"Transporte con carretilla". Fíjese en que la carretilla tenga suficiente capacidad portantey en la vía de transporte.Transporte el robot poniendo siempre mucho cuidado.
3 - 16
Transporte
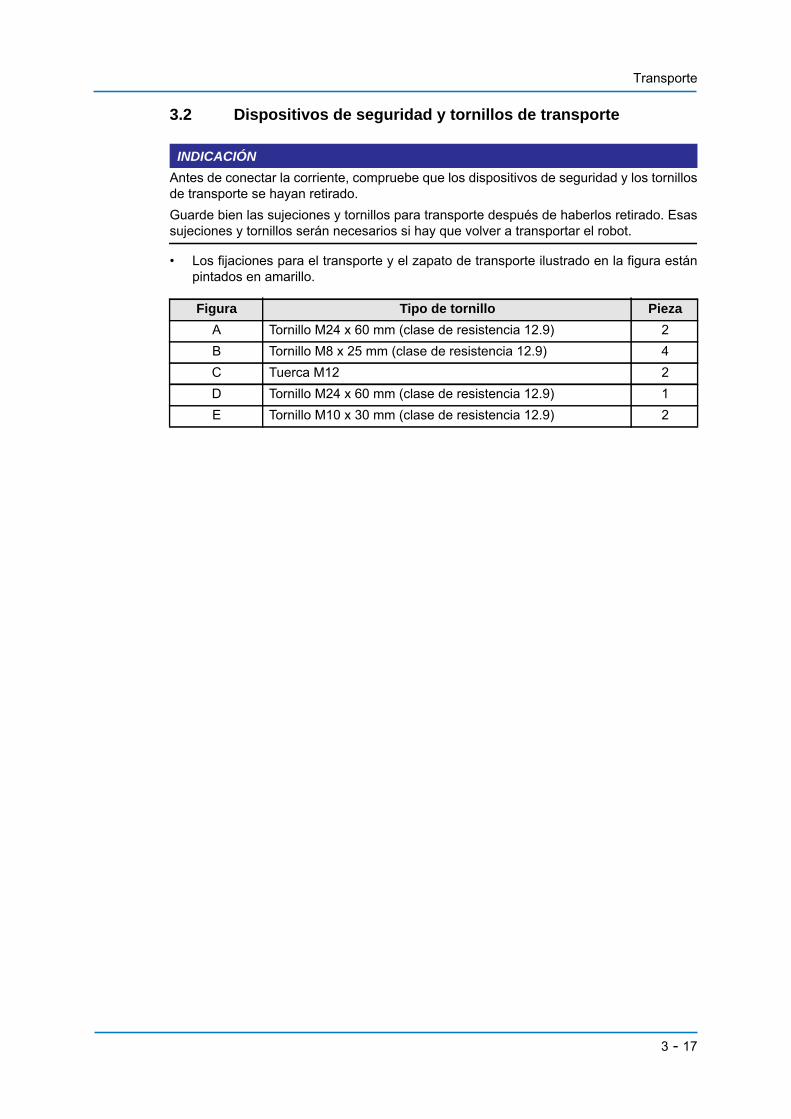
3.2 Dispositivos de seguridad y tornillos de transporte
INDICACIÓNAntes de conectar la corriente, compruebe que los dispositivos de seguridad y los tornillosde transporte se hayan retirado.Guarde bien las sujeciones y tornillos para transporte después de haberlos retirado. Esassujeciones y tornillos serán necesarios si hay que volver a transportar el robot.
• Los fijaciones para el transporte y el zapato de transporte ilustrado en la figura estánpintados en amarillo.
Figura Tipo de tornillo PiezaA Tornillo M24 x 60 mm (clase de resistencia 12.9) 2B Tornillo M8 x 25 mm (clase de resistencia 12.9) 4C Tuerca M12 2D Tornillo M24 x 60 mm (clase de resistencia 12.9) 1E Tornillo M10 x 30 mm (clase de resistencia 12.9) 2
3 - 17

Instalación
4 Instalación
ATENCIÓN!Lesiones personales y daños materialesHay que tomar en cuenta las medidas de precaución mencionadas a continuación. Compruebe que el control del robot esté completo y no presente daños. En ningún caso debe ponerse en funcionamiento un control del robot que esté
incompleto o que presente daños. Verifique que todos los dispositivos de seguridad y tornillos para transporte se hayan
retirado.
4.1 Medidas protección
PELIGRO!Lesiones personales y daños materialesEl sistema robótico no debe funcionar jamás sin resguardos. La puesta en funcionamientosin adoptar las medidas de protección adecuadas puede causar la muerte o graveslesiones corporales o daños materiales.Instale las medidas de protección mencionadas a continuación: Resguardos distanciadores Dispositivos de protección que actúan sin contacto Cercos Sectores marcados Letreros indicadores Botón de parada de emergencia Indicadores
INDICACIÓNResponsabilidad del clienteEl usuario de un robot o de un sistema robótico tiene que garantizar el cumplimiento detodas las reglas y requisitos de las normas DIN EN ISO 10218-1 y DIN EN ISO 10218-2.En primer lugar: La elaboración de una evaluación de riesgos La instalación de los resguardos La formación en intervalos regulares de los operarios La inspección regular de todos los resguardos El control de que el equipo sea usado de acuerdo con su finalidad.
4 - 18

Instalación
4.2 Condiciones ambientales y ubicación
El robot sólo se podrá instalar cuando la ubicación cumpla con las siguientes condicionesambientales:• La temperatura ambiente deberá ser de: desde 0 °C hasta 45 °C.• Humedad del aire: del 20 % al 20% de humedad relativa del aire (sin formación de agua
condensada).• Libre de gases y líquidos corrosivos o gases explosivos. Libre de agua, aceite, polvo y
sin demasiada radiación eléctrica dispersa (plasma).• Protegido contra fuertes vibraciones (Vibración de aceleración: máx. 4,9 m/s² [0,5 G]).• Irregularidad máxima en la superficie de contacto de la base del robot: 0,5 mm.
4 - 19

Instalación
4.3 Ejemplo de montaje
1. Fije y asegure primero la placa de base sobre el suelo. 2. El zócalo del robot está dotado de 8 agujeros de fijación. Fije la base del robot con los
tornillos M24 (clase de resistencia 12.9) , longitud mínima: 80 mm.3. Acto seguido, fije el zócalo del robot sobre la placa de base. Apriete cuidadosamente
los tornillos y los de anclaje para evitar que se suelten mientras funcione el equipo (mirela figura: "Montaje del robot en la placa base").
Fig. 4-1: Montaje del robot en la placa de base
8 tornillos M24 40 o másArandela elástica 8 agujeros Ø 22Placa 2 agujeros Ø 20H7
Zócalo de robot 2 agujeros Ø 16H7
Placa de base Tornillo de anclajeTodas las medidas corresponden a mm
786
5050 540
5054
0
550
50
290 ±0,1
290 ±0,1 290 ±0,1
290
±0,1
290
±0,1
290 ±0,1
327
1
2
4
5
5
6
78
9
10
1 62 73 84 95 10
4 - 20

Instalación
Fig. 4-2: Placa de base
Montaje directo del robot en el pisoLa base debe tener una capacidad portante suficiente para soportar el robot. La placa defondo debe ser sólida y tener un grosor suficiente, que soporte las cargas máximasprovocadas por el robot.El valor aproximado estándar corresponde a la base del robot con una resistencia dehormigón (base) de 200 mm. como mínimo fijado directamente en el piso con tornillos deanclaje. Fíjese antes de montar el robot que el piso sea plano y que no esté agrietado.Un suelo con un grosor inferior a 200 mm no tiene suficiente capacidad portante para unainstalación.Haga una fijación fuerte que resista los esfuerzos que surjan.
INDICACIÓN Si va a instalar el robot directamente en el suelo, póngase en contacto con el fabricante
del material de sujeción que va a utilizar.
4 - 21
Instalación
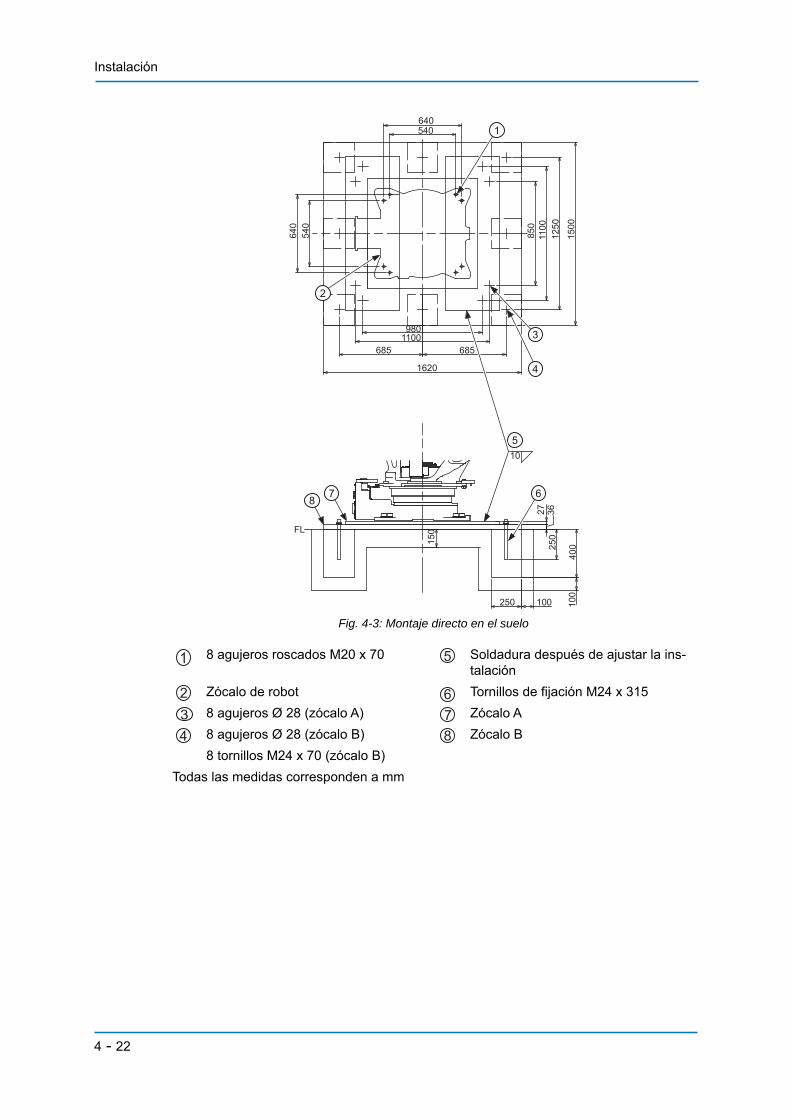
Fig. 4-3: Montaje directo en el suelo
8 agujeros roscados M20 x 70 Soldadura después de ajustar la ins-talación
Zócalo de robot Tornillos de fijación M24 x 3158 agujeros Ø 28 (zócalo A) Zócalo A8 agujeros Ø 28 (zócalo B)8 tornillos M24 x 70 (zócalo B)
Zócalo B
Todas las medidas corresponden a mm
5
FL
10
1100
1100685685
1500
1620
100
250
3627
150
100
400
250
850
1250
980
640540
640
540
87 6
2
1
4
3
1 5
2 63 74 8
4 - 22
Instalación
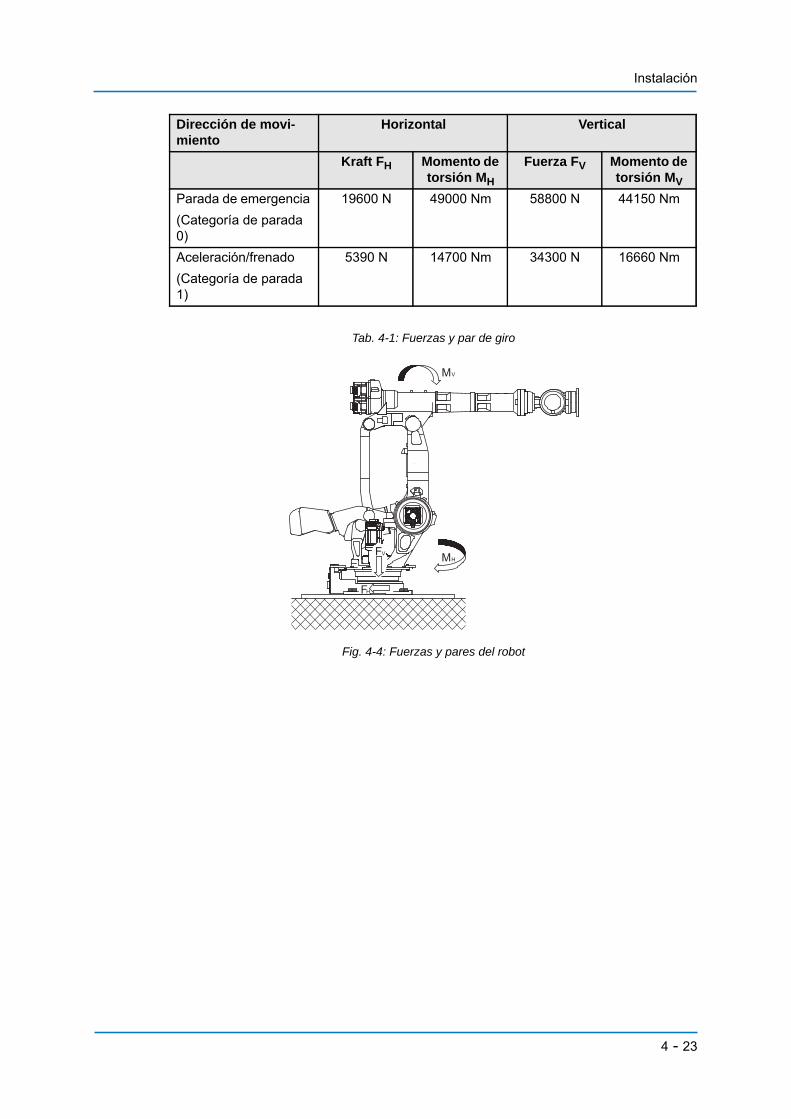
Tab. 4-1: Fuerzas y par de giro
Fig. 4-4: Fuerzas y pares del robot
Dirección de movi-miento
Horizontal Vertical
Kraft FH Momento de torsión MH
Fuerza FV Momento de torsión MV
Parada de emergencia (Categoría de parada 0)
19600 N 49000 Nm 58800 N 44150 Nm
Aceleración/frenado(Categoría de parada 1)
5390 N 14700 Nm 34300 N 16660 Nm
MV
MHFV
FH
4 - 23

Cableado
5 Cableado
PELIGRO!Peligro de muerte por descarga eléctrica. Peligro de incendio por cortocircuito.La conexión eléctrica sólo podrá ser realizada por el personal técnico.Es indispensable que siga las instrucciones mencionadas a continuación antes deestablecer las conexiones. Asegúrese de que la resistencia a puesta a tierra corresponda a 0,1 Ω como máximo. Desconecte la alimentación principal de voltaje. Coloque la señal de aviso específica, p.ej., "No conectar voltaje".. Instale el interruptor de reconexión prescrito.
5.1 Puesta a tierra
Acate los reglamentos locales y las normas electrotécnicas al efectuar la toma de tierra. Lasección transversal de los conductores debe ser de al menos 6 mm².Mire Fig. 5-1: "Conexión a tierra" con respecto a la conexión directa del cable de puesta atierra.
INDICACIÓN¡Advertencia respecto a la conexión a puesta a tierra!Jamás utilice un cable de puesta a tierra junto con otro de la misma naturaleza, p.ej., De otro consumidor eléctrico De otro consumidor motriz Aparatos de soldadura, etc.
Cuando el cable de puesta a tierra se encuentre en un canal de cable metálico, en unacanalización metálica o en otro sistema metálico, será necesario conectarlo a tierra segúnlas reglas electrotécnicas pertinentes.
Fig. 5-1: Conexión a tierra
El tornillo M8 para la conexión a tierra se suministra junto con el robot (toma de tie-rra de 6 mm² como mínimo).
1
1
5 - 24
Cableado
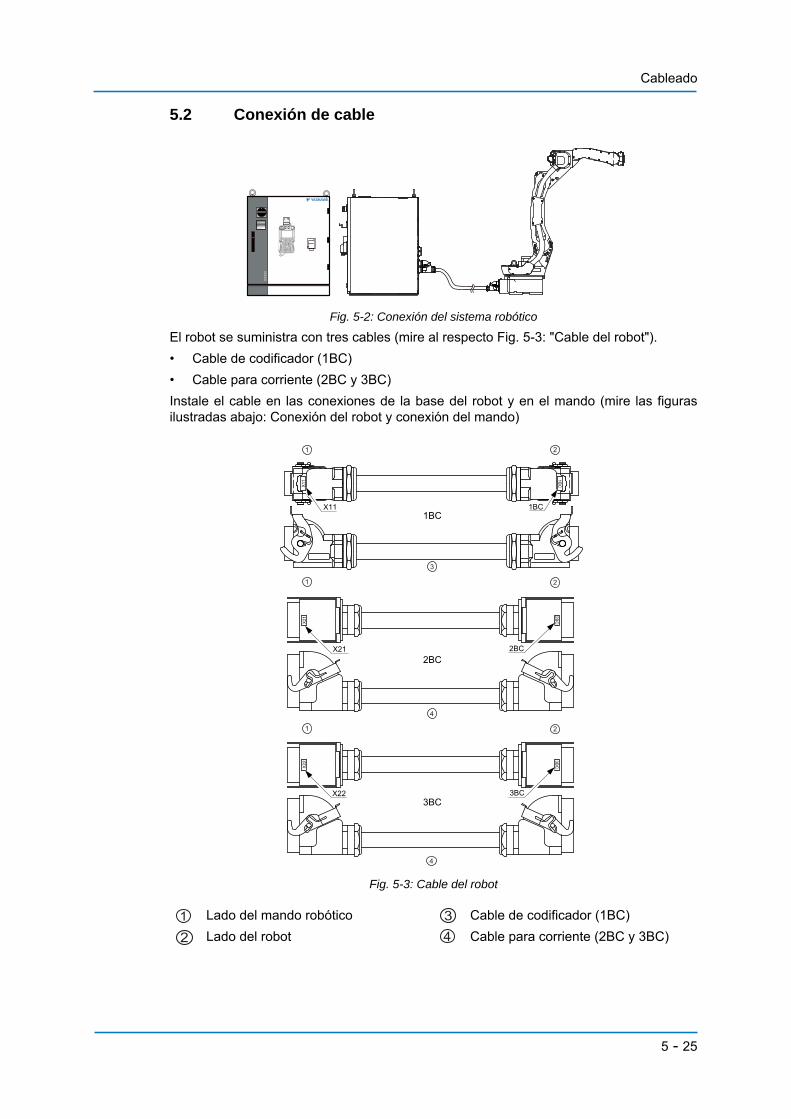
5.2 Conexión de cable
Fig. 5-2: Conexión del sistema robótico
El robot se suministra con tres cables (mire al respecto Fig. 5-3: "Cable del robot").• Cable de codificador (1BC)• Cable para corriente (2BC y 3BC)Instale el cable en las conexiones de la base del robot y en el mando (mire las figurasilustradas abajo: Conexión del robot y conexión del mando)
Fig. 5-3: Cable del robot
Lado del mando robótico Cable de codificador (1BC)Lado del robot Cable para corriente (2BC y 3BC)
DX
200
YASAKAW DX200Part No.Power Supply Peak kVAAC 400/415/440 Average kVASerial No.Date/SignatureType ERDR-Robot TypeRobot Order No.Robot Serial No.
YASKAWA ELECTRIC CORPORATION2-1 SHIROISHI KUROSAKI, YAHATANISHILU KITAKYUSYU, JAPAN
YASKAWA Europe „Robotics Division“ GmbHYaskawastr. 1, D-85391 Allershausen
X22 3BC
X22
3BC
2BC
3BC
1BC
X21 2BC
X21
2BC
X11
1BC
X11 1BC
1 2
1
1
2
2
3
4
4
1 32 4
5 - 25

Cableado
5.2.1 Conexión del robot
Antes de que conecte el cable del robot, fíjese en la marcación del cable y en lasconexiones en la chapa de enchufe del robot (mire la figura: "Cable del robot").1. Inspeccione el cable del codificador (1BC) y el cable de la corriente (2BC).2. Conecte el cable del codificador (1BC) con la chapa de enchufe del robot.3. Conecte el cable de la corriente (2BC) con la chapa de enchufe del robot.4. Conecte el cable de la corriente (3BC) con la chapa de enchufe del robot.Fíjese en que los elementos de cierre encajen cada uno audiblemente (hasta que escucheun clic).
Fig. 5-4: Chapa del enchufe del robot
AA
FB
3BC2BC
1BC
S1
AIR
AA
3BC2BC
1BCAIR
S1FB
5 - 26

Cableado
5.2.2 Conexión del mando robótico
Revise la marcación de ambos cables del robot y las conexiones con el mando antes deconectar el cable con el mando.Conecte el cable siguiendo los pasos mencionados a continuación.1. Conecte el cable del codificador (1BC) X11 en la conexión 1BC con el mando robótico.2. Conecte el cable de la corriente (2BC) X21 en la conexión 2BC con el mando robótico.3. Conecte el cable de la corriente (3BC) X22 en la conexión 3BC con el mando robótico.Fíjese en que los elementos de cierre encajen cada uno audiblemente (hasta que escucheun clic).
Fig. 5-5: Conexión del mando robótico
X 11
X 21X -1
X -2
X -3X 22
5 - 27
Cableado
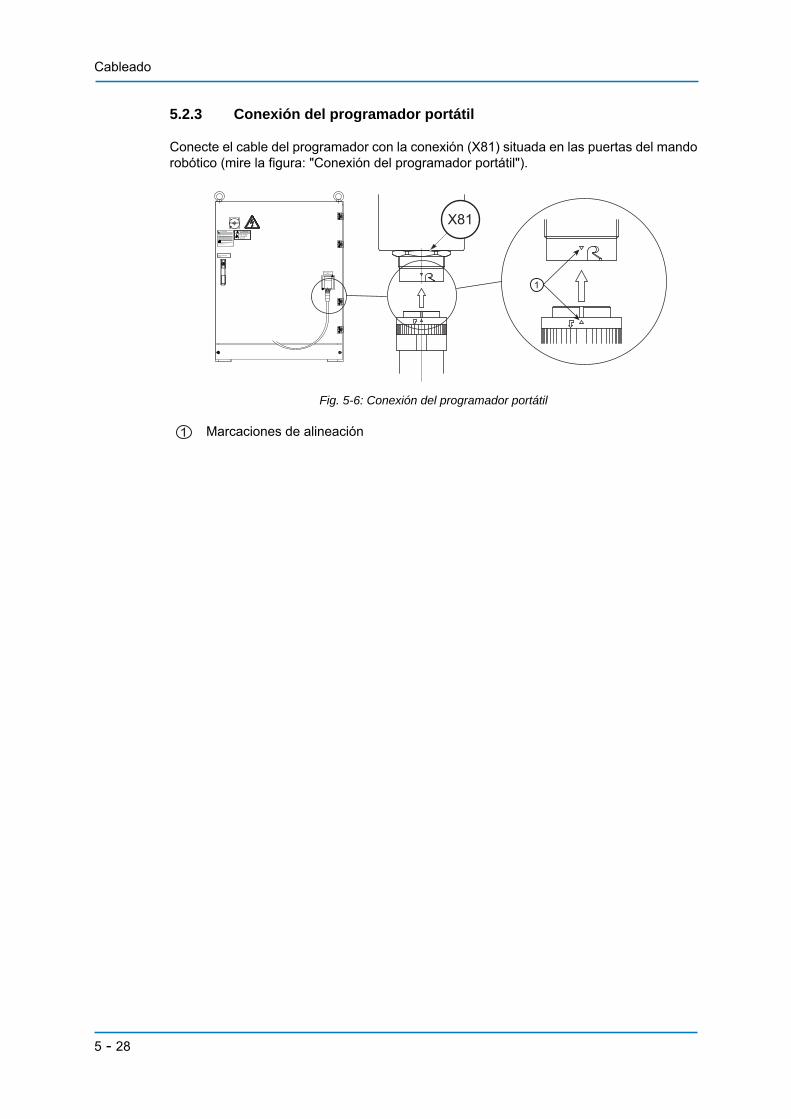
5.2.3 Conexión del programador portátil
Conecte el cable del programador con la conexión (X81) situada en las puertas del mandorobótico (mire la figura: "Conexión del programador portátil").
Fig. 5-6: Conexión del programador portátil
Marcaciones de alineación
1
X81
X81PROGRAMMING PENDANT
PROPERLY.CHECK ALL THE DOOR LOCKS
NJ3005-1
kVA
kVA
ERDR-
Average
Peak
NJ3053-1
Kammerfeldstr. 1, D-85391 Allershausen
2-1 Kurosaki Shiroishi Yahatanishi-Ku Kitakyushu-City Fukuoka 806-0004 JapanYASKAWA Electric corporation
Robot Serial No.
Robot Order No.
Robot Type
Type
Date/Signature
Serial No.
AC 400/415/440 V
Power Supply
Part No.
Motoman DX100
with power ON.
WARNINGDo not open the doorHigh Voltage
1
5 - 28

Datos técnicos
6 Datos técnicos
Tipo: J00Variantes de montaje: Montaje en el pisoGrado de libertad: 6Capacidad de carga: 400 kgExactitud de repetición:1
1. Ensayada análogamente a ISO 9283.
± 0.3 mmAbsorción de potencia: 7 kVAPeso: 2700 kgÁrea de trabajo de los ejes principales:Eje S (giro) -180° ~ +180°Eje L (brazo inferior)2
2. La zona móvil de los ejes L, U y R está limitada cada una según la posición.
-55° ~ +61°Eje U (Brazo superior)² -113° ~ +18°Área de trabajo de los ejes manuales:Eje R (Rodillo manual)² -360° ~ +360°Eje B (Giro de muñeca/pandeo) -115° ~ +115°Eje T (giro manual) -360° ~ +360°Clase de protección (IP):Ejes principales 30Ejes manuales 67Velocidad máxima:Eje S 1.78 rad/s, 102°/sEje L 1.69 rad/s, 97°/sEje U 1.69 rad/s, 97°/sEje R 1.40 rad/s, 80°/sEje B 1.40 rad/s, 80°/sEje T 3.00 rad/s, 172°/sMomento fiable (Nm):3
3. Par permitido: "Cargas manuales en el capítulo 7" para obtener más informaciones sobre el par de inerciapermitido.
Eje R 2989 NmEje B 2989 NmEje T 1343 NmPar de inercia permitido en (kgm²):Eje R 500 kgm²Eje B 500 kgm²Eje T 315 kgm²Nivel de intensidad acústica (dB):4
4. La medición se efectúa con la carga y la velocidad máximas del robot. La medición se efectúa a una alturade 1,2 m y 1,5 m sobre el suelo y a una distancia de 400 mm respecto al área de trabajo.
73 dB
6 - 29

Datos técnicos
6.1 Denominación de las piezas y de los ejes de trabajo
Fig. 6-1: Denominación de las piezas y de los ejes de trabajo
6.2 Dimensión de la base del robot
Fig. 6-2: Dimensiones del zócalo del robot
Brazo superior (Brazo U) Brazo inferior (Brazo L)Muñeca Cabezal giratorio del eje SBrida de muñeca Zócalo de robot
8 agujeros de fijación Ø 22 2 agujeros Ø 16H72 agujeros Ø 20H7 Todas las medidas corresponden a mm
T-
T+
B-
B+
R-
R+
U-
U+
L+
L-
6
5
4
1 2
4
S+
S-
1 42 53 6
786
5050 540
5054
0
550
50
290 ±0,1
290 ±0,1 290 ±0,1
290
±0,1
290
±0,1
290 ±0,1
12
3
1 32
6 - 30

Datos técnicos
6.3 Dimensiones y área definida de trabajo
Fig. 6-3: Dimensiones y área de trabajo máxima
Punto P Área de trabajo definida por el punto PTodas las medidas corresponden a mm
180°
180°
R2942R821
R1371
445143,5
16 ,5
10070
60
822 10 0
R1030
0
796
1164
1318
2942
0
1409
1498
22362401
1371
215
1849
2565
989
0
2683
922
900
1490
010
5025
026
0
400
55 °
61°
3001605500
113°
49 °
18°
43°
113°R1420
202
(1674)
609 680
222
2
1
1 2
6 - 31

Datos técnicos
6.4 Área de trabajo regulable
El área de trabajo del eje S cambia dependiendo de la aplicación.Póngase en contacto por favor con su filial de YASKAWA si tiene que hacer unamodificación.
La graduación del tope mecánico sólo puede ser hecha en pasos de 60°.
punto EspecificacionesÁrea de trabajo del eje S ±180°(estándar)
± 165°± 150°± 135°± 120°± 105°± 90°± 75°± 60°± 45°± 30°± 15°*
6 - 32

Datos técnicos
6.5 Recorrido y tiempo de marcha por inercia
Establecer los tiempos de marcha en inercia es necesario para poder determinar ladistancia de seguridad para los dispositivos de seguridad. El tiempo de marcha en inerciacorresponde al lapso que transcurre desde que se dispara la señal de parada hasta que elrobot se pare totalmente. El trayecto de la marcha por inercia es el ángulo que recorre elrobot por dispararse la señal de parada hasta que se inmoviliza por completo.En los siguientes diagramas se representan únicamente los valores respectivos para losejes S, L y U, ya que éstos suelen presentar el mayor desplazamiento. Los valores mediosindicados para paradas de seguridad con categoría de parada 0 están calculados medianteensayo y simulación.El recorrido y los tiempos reales de la marcha por inercia pueden divergir a causa deinfluencias internas y externas en el par de frenado. Dependiendo del modo defuncionamiento, de la robotización y de la cantidad de paradas de seguridad de categoría0 disparadas, puede desgastarse el freno de manera diferente. Se recomienda por ello queverifique el recorrido de la marcha en inercia por lo menos una vez al año.
Fig. 6-4: Ejes principales, con desplazamiento del 100%, el 66% y el 33%
En la Fig. 6-4: "Ejes principales, con desplazamiento del 100%, el 66% y el 33%" , serepresentan conforme a UNE-EN ISO 10218-1 los ejes S, L y U con un desplazamiento del100%, el 66% y el 33%.En estas tres posiciones se determinaron los recorridos y los tiempos de marcha en inerciacon una parada de seguridad con categoría de parada 0 y con categoría de parada 1. Enlos diagramas inferiores aparecen indicados con cargas del 33%, el 66% y el 100%respectivamente.En la siguiente tabla se recoge la leyenda correspondiente:
Términos DenominaciónCategoría 0, Capacidad de carga 100% Rosa Categoría 0, Capacidad de carga 66% Verde Categoría 0, Capacidad de carga 33% Gris Categoría 1 Azul Recorrido de marcha en inercia, grado ° [deg]Tiempo de marcha en inercia, segundos [sec]
33%66%
100%
6 - 33

Datos técnicos
6.5.1 Categoría de parada 0
6.5.1.1 Posición de parada del eje S
• desplazamiento del 100%
• desplazamiento del 66%
• desplazamiento del 33%
Velocidad del robot, grado °/segundos [deg/s]Términos Denominación
[deg
]
[deg/s] [deg/s][s
ec]
[deg
]
[deg/s] [deg/s]
[sec
]
[deg
]
[deg/s] [deg/s]
[sec
]
6 - 34

Datos técnicos
6.5.1.2 Posición de parada del eje L
• desplazamiento del 100%
• desplazamiento del 66%
[deg
]
[deg/s] [deg/s]
[sec
]
[deg
]
[deg/s] [deg/s]
[sec
]
6 - 35

Datos técnicos
6.5.1.3 Posición de parada del eje U
• desplazamiento del 100%
• desplazamiento del 66%
[deg
]
[deg/s] [deg/s]
[sec
]
[deg
]
[deg/s] [deg/s]
[sec
]
66%
6 - 36

Datos técnicos
6.5.2 Categoría de parada 1
El tiempo de marcha por inercia y el recorrido marcha por inercia de la categoría de parada1 no dependen de la posición de parada de los ejes del robot y de la capacidad de carga.
6.5.2.1 Posición de parada del eje S
• desplazamiento del 100%
6.5.2.2 Posición de parada del eje L
• desplazamiento del 100%
6.5.2.3 Posición de parada del eje U
• desplazamiento del 100%
[deg
]
[deg/s] [deg/s]
[sec
]
[deg
]
[deg/s] [deg/s]
[sec
]
[deg
]
[deg/s] [deg/s]
[sec
]
6 - 37

Carga fiable para el eje manual y la brida de muñeca
7 Carga fiable para el eje manual y la brida de muñeca
7.1 Brida de muñeca
Las dimensiones de la brida de la muñeca están ilustradas en la figura: "Brida de lamuñeca". Para que las marcas de posición cero estén visibles permanentemente, laherramienta sólo se unirá mediante una brida con el diámetro interior. La profundidad delracor interno debe corresponder como máximo a 8 mm.
INDICACIÓNRetire el revestimiento anticorrosivo antes de montar una herramienta en la brida. Elmaterial más indicado para ello es el diluyente para lacas nitrocelulósicas o el aceite ligero.
12 agujeros M12 x 25 Ø 315 h6
Agujero Ø12H7 x 15 Ø 160H7
Perforación circular, Ø 250 Todas las medidas corresponden a mm
915
1
2
3
45
1 42 53
7 - 38

Carga fiable para el eje manual y la brida de muñeca
7.2 Carga de muñeca fiable
La carga fiable máxima de la muñeca es de 400 kg. Si hay que hacer fuerza en vez decarga en el eje de la muñeca, es necesario que la fuerza sea hecha dentro de los pares enel caso del eje (mire la figura ilustrada en la tabla siguiente).Póngase en contacto con su YASKAWA Europe GmbH para obtener más información oayuda.
Mantenga la distancia del centro de gravedad de la carga/masa dentro de lasespecificaciones; tome como referencia la figura "Cargas manuales".
Fig. 7-1: Cargas manuales
Par permitido y par de inercia permitido
Eje Momento fiable (Nm) Par de inercia permitido en (kgm²)
Eje R 2989 Nm 500 kgm²
Eje B 2989 Nm 500 kgm²
Eje T 1343 Nm 315 kgm²
Punto P Centro de rotación del eje BCentro de rotación de los ejes R y T Todas las medidas corresponden a mm
2
3
1 400kg
350kg300kg250kg
150kg
200kg
LB(mm)
LT(mm)
200018001600140012001000800600400
1000
800
600
400
200
1000
800
600
400
200
200
1 32
7 - 39

Carga fiable para el eje manual y la brida de muñeca
4 agujeros M8 x 152 agujeros M8 x 154 agujeros M10 x 25
Todas las medidas corresponden a mm
Aplicación AnotacionesA Cableado Carga máxima incluida carga de muñeca
400 kgB, C Cableado y carga de válvulas Máximo: 50 kg
49 Nm máx. para el aumento del par de tor-sión del brazo superior.
D Otros Máximo: 200 kg
1
100
60
160
588.5
445
100
70
965.5 100
105
140
260
965.5
90
40
230
40230
9015
0
370
B
A
D
C
1
2
1
3
23
7 - 40

Carga fiable para el eje manual y la brida de muñeca
El par de inercia permitido se calculará cuando el par permitido haya alcanzado su valormáximo. El par de inercia total permitido para el eje T varía y depende del par admisible.Póngase en contacto a tiempo con su filial de YASKAWA cuando tenga dudas sobre elcálculo de la carga o de la distancia del centro de gravedad.Ejemplo:En el caso del robot YASKAWA HP20D, por ejemplo, el par de inercia permitido para el ejeT corresponde a 0,25 kgm² con un par admisible de 19,6 Nm y a 0,75 kgm² con un paradmisible de 0,1 Nm.
7 - 41

Cable interior y boquillas de paso de aire comprimido
8 Cable interior y boquillas de paso de aire comprimidoEl cable interior (3BC: 18 conductores 6 x 0,50 mm² y 12 x 0,30 mm²) y las mangueras seusan para los aparatos periféricos (p.ej., las mordazas). Éstas están montadas en el brazosuperior de la manera representada en la figura: "Enchufe para el cable interior y la boquillade paso de aire comprimido".Las clavijas 1 a 18 están ocupadas de la manera representada en la figura siguiente. Elusuario se encargará de realizar el cableado.Es necesario reunir los requisitos mencionados a continuación:• La intensidad de la corriente total permitida para el arnés interior debe corresponder a
21 A ).• La carga admisible de corriente por conductores individuales debe corresponder a 0,50
mm² y 0,30 mm²como máximo (corte transversal) 5,8 A o menos con 0,50 mm² y 3,0 Acon 0,30 mm² ).
• La presión de aire de la manguera debe corresponder como máximo a 600 kPA (eldiámetro interior de la manguera Ø 8 mm).
Fig. 8-1: Enchufe para el cable y la conducción de aire comprimido incorporados
Enchufe para el arnés de cables inter-nos en la base
Enchufe para el arnés de cables inter-nos en la carcasa
Entrada de aire en la base Salida de aire en la carcasa
A A
1 3
2 4
8 - 42

Cable interior y boquillas de paso de aire comprimido
Fig. 8-2: Dibujo detallado del enchufe
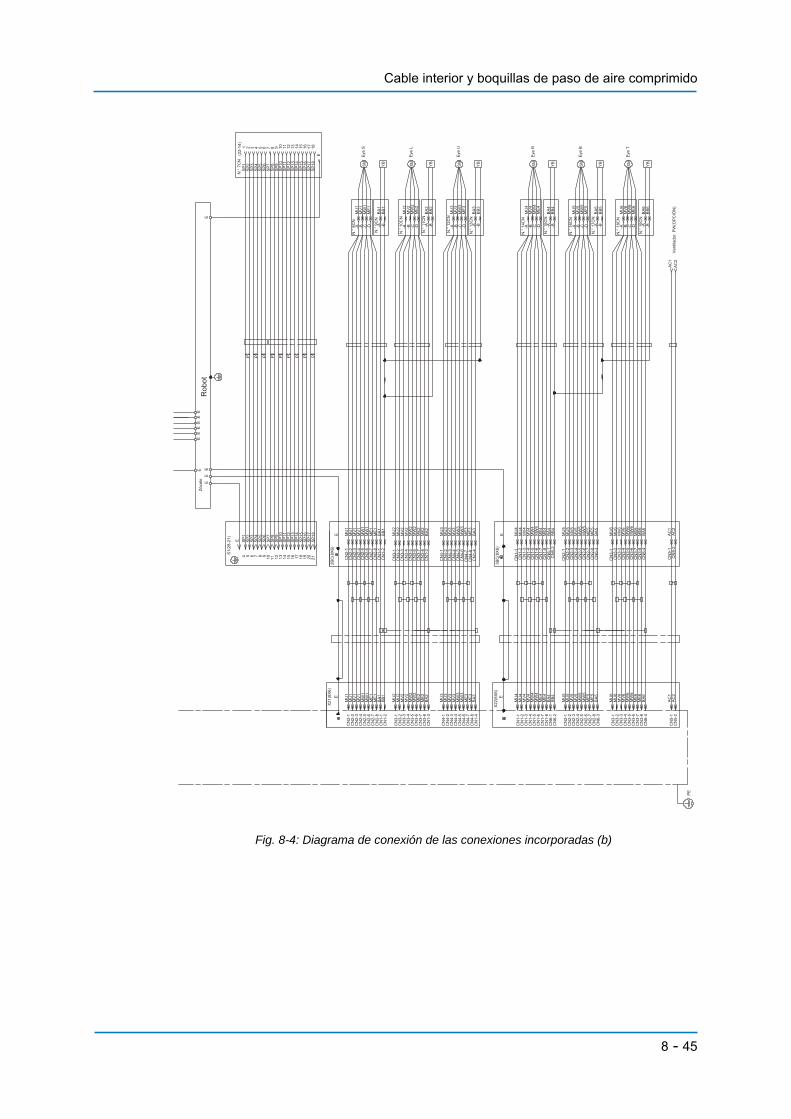
Las clavijas utilizadas en los enchufes (3BC: 18 conductores 6 x 0,50 mm² y 12 x 0,30 mm²)están conectadas con alambres individuales en la base y en el brazo.Los diagramas para las conexiones internas del robot están representadas en las figurasdel plano de conexión A y B.
= ocupado = desocupado
Clavijas utilizadas Enchufe en la baseEnchufe en la carcasa
P
P
P
P
P
P
3
12
15
11
16
6 7
1
14
98
13
4 5
2
10
17 18
1P
P32
P678
54
10
1211
9
16151413
6 x 0.5 mm2
1817
P
12 x 0.3 mm2
P
P
P
P
P
5678
4
6 x 0.5 mm2
10111213
1615
1817
14
12 x 0.3 mm2
9
P
P
P
2021
321 4
15
9
21
28
22
33
13
86
12
7
20
26
18
25
19
10
5
17
23
16
11
24
3635
30 3129
34
14
32
2719
1
1
23
1 32
8 - 43

Cable interior y boquillas de paso de aire comprimido
Fig. 8-3: Diagrama de conexión de las conexiones incorporadas (a)
A1
B1
A2
B2
A3
B3
P
-2
N.°
1C
N
-10
N.°
2C
N
-1 -1-9-4-5-6
PG
PG
PG
PG
PG
PG
AL1
AL2
AL1
AL2
Lám
para
(OP
CIÓ
N)
Eje
S
Eje
L
Eje
U
Eje
R
Eje
B
Eje
T
Ven
tilad
or (O
PC
IÓN
)
X11
(10X
4)
0VC
N4-
10C
N4-
10
LA1
LB1
24V
LD1
LD1
LD2
LB2
LB1
LC2
LD2
LB2
LA2
LC3
LD3
LB3
LA3
LD2
LD1
LB1
LB2
B1
LB1
LA1
LC1
LD1
LB1
LA1
LC1
L
PG
0V3
0BA
T3P
G5V
3
BA
T3U
PG
5V2
PG
0V2
0BA
T2B
AT2
0BA
T1P
G5V
1P
G0V
1
BA
T1S
PPPPPPPPP
1BC
(10P
×4)
X
0BT
5
N.°
26C
N
PP0B
TB
AT
BA
T7 3 7 854 61 286
PP0B
TB
AT
BA
T0B
T
3 421
0BA
T21
0BA
T22
BA
T22
BA
T21
BA
T11
0BA
T12
BA
T12
0BA
T11
25 7 9827 1 32 5 6431 3228 29 3026 10
DX
200
PG
0V6
111
-1+2
4V+2
4VC
N1-
5+2
4V
21 22 242319 201817
0BA
T4
0BA
T5
0BA
T6
PG
0V2
PG
0V3
PG
0V5
PG
0V4
PG
5V4
PG
5V3
PG
5V2
BA
T4
BA
T5
BA
T6
PG
5V1
PG
0V1
PG
5V5
0BA
T2
0BA
T3B
AT2
BA
T10B
AT1
BA
T3
OB
T
BA
T
BA
TO
BT
+5V
FG6
OB
T
BA
TO
BT
DA
TA+6
DA
TA-6
0VOB
T+5
V
FG5
0VFG4
DA
TA-5
BA
T
OB
TB
AT
DA
TA+5
DA
TA+4
OB
TB
AT
+5V
DA
TA-4
BA
T
0V
-5 -2
N.°
6C
N
-6 -5 -4 -9-9-4
N.°
4C
N
-2
N.°
5C
N
-2 -6-4 -9-6 -5
DA
TA+2
0V FG3
BA
TO
BT
+5V
DA
TA-3
DA
TA+3
OB
TB
AT
FG2
+5V
0VBA
TO
BT
DA
TA-2
BA
T
FG1
OB
T
OB
T+5
V0VB
AT
DA
TA-1
DA
TA+1
-10
-2 -10
N.°
3C
N
-2 -9-5 -4-6-4 -9-6 -5
CN
4-1
+24V
CN
2-4
CN
2-5
CN
2-10
CN
4-7
CN
4-8
CN
4-3
CN
4-6
24V
LD1
AL2
BC
2
AL1
LB1
CN
3-3
CN
3-6
CN
3-7
CN
3-8
CN
2-7
CN
2-8
CN
2-6
CN
3-2
CN
3-1
CN
1-6
CN
2-2
CN
2-3
CN
2-1
CN
1-8
CN
1-7
CN
1-10
CN
1-3
CN
1-9
CN
1-2
CN
1-5
CN
1-4
CN
1-1
SP
G+6
SP
G-6
FG6
FG5
SP
G-5
SP
G+5
SP
G+4
SP
G-4
FG4
SP
G-3
SP
G+3
SP
G-2
FG3
FG2
SP
G+1
SP
G-1
+24V
FG1
0V0V SP
G+2
+24V
CN
2-10
CN
2-5
CN
2-4
CN
4-8
CN
4-3
CN
4-7
CN
4-6
P
EBC
2
LB1
CN
3-8
CN
3-6
CN
3-7
CN
3-3
CN
2-8
CN
3-2
CN
3-1
CN
2-6
CN
2-7
CN
4-1
PPP
SP
G+6
SP
G-6
FG6
FG5
SP
G+4
SP
G-4
SP
G+5
SP
G-5
FG4
CN
1-6
CN
2-3
CN
2-2
CN
2-1
CN
1-8
CN
1-7
CN
1-3
CN
1-10
CN
1-2
CN
1-1
CN
1-9
CN
1-4
PPPPP
SP
G-3
SP
G+3
FG3
FG2
SP
G-2
+24V
SP
G-1
SP
G+1
FG1
0V0V SP
G+2
+24V
-2 -4-3
0V0V
423
N.°
25C
N
N.°
24C
N
N.°
23C
N
N.°
22C
N
N.°
21C
N
N.°
20C
N
LC1
LD1
16151412 13P
G5V
6
-2 -1 -2 -3 -4-4-3-1-3 -4-2-1-4-3-2-1-3 -4-2-1-2 -3 -4-1
BC
2B
C1
0BA
T5
BA
T60B
AT6
PG
5V6
PG
0V6T
PG
5V5
PG
0V5B
BA
T5
0BA
T4
PG
0V4
PG
5V4
BA
T4R
P P PPPPPPP
0V
X
X
X
LD1
-1 -1 -1 -1-10
-10
-10
+24V
24V
B3B
2
B1
A3A
2
A1
LA3
LB3
LB2
LB1
LB1
LA1
LC3
LD3
LD2
LD1
LD1
LC1
LD1
LC2
LD2
LD2LD
1LC
1
LB1
LA2
LB2
LB2LB
1LA
1
Inte
rrupt
or d
e fin
de
carre
ra d
e ex
ceso
de
los
ejes
L y
U
Cone
ctad
o en
INTE
RRUP
TOR
DE F
IN D
E CA
RRER
A DE
EXC
ESO
EJE
S
Cone
ctad
o en
INTE
RRUP
TOR
DE F
IN D
E CA
RRER
A DE
EXC
ESO
EJE
L
Cone
ctad
o en
Eje
S, L
y U
con
esp
ecific
ació
n de
l inte
rrupt
or lim
itado
r
INTE
RRUP
TOR
DE F
IN D
E CA
RRER
A DE
EXC
ESO
EJE
S
INTE
RRUP
TOR
DE F
IN D
E CA
RRER
A DE
EXC
ESO
EJE
L
Inte
rrupt
or d
e fin
de
carre
ra d
e ex
ceso
de
los
ejes
L y
U
Cone
ctad
o en Co
nect
ado
en
Cone
ctad
o en
A1
Eje
S c
on e
spec
ifica
ción
del
inte
rrup
tor l
imita
dor
Eje
S In
terr
upto
r de
fin d
e ca
rrer
aC
onec
tado
en
Eje
L In
terr
upto
r de
fin d
e ca
rrer
aC
onec
tado
en
8 - 44
Cable interior y boquillas de paso de aire comprimido
Fig. 8-4: Diagrama de conexión de las conexiones incorporadas (b)
BB
6-B-A -A
N.°
18C
N
N.°
19C
N
-B -C -DS
ME
ye T
YB
AC
1C
N5-
1A
C2
CN
5-2
AC
1A
C2
ME
3M
E3
CN
2-1
CN
2-2
CN
2-3
CN
2-4
CN
2-5
CN
2-6
CN
2-7
CN
2-8
CN
1-1
CN
1-2
CN
3-1
CN
3-2
CN
3-3
CN
3-4
CN
3-5
CN
3-6
CN
3-7
CN
3-8
CN
1-3
CN
4-1
CN
4-2
CN
4-3
CN
4-4
CN
4-5
CN
4-6
CN
4-7
CN
4-8
CN
1-4
CN
1-1
CN
1-2
CN
1-3
CN
1-4
CN
1-5
CN
1-6
CN
1-7
CN
1-8
CN
6-1
CN
6-2
CN
2-1
CN
2-2
CN
2-3
CN
2-4
CN
2-5
CN
2-6
CN
2-7
CN
2-8
CN
6-3
CN
3-1
CN
3-2
CN
3-3
CN
3-4
CN
3-5
CN
3-6
CN
3-7
CN
3-8
CN
6-4
CN
5-1
CN
5-2
AC
1A
C2
CN
1-8
Ven
tilad
or P
W(O
PC
IÓN
)
CN
1-7
E
BB
4-B-A -A
N.°
14C
N
N.°
15C
N
-B -C -DS
ME
ye R
YB
MU
5
MV
5
MW
5
ME
5
MW
5
MV
5
ME
5
BA
5
MU
5C
N2-
2M
U5
CN
2-4
CN
2-6
CN
2-3
CN
2-5
CN
6-3
MV
5
MW
5
MV
5
ME
5
MW
5
ME
5
BA
5
CN
2-1
MU
5
CN
2-8
CN
2-7
MU
5M
V5
MW
5M
E5
BA
5B
B5
-B-A -A
N.°
16C
N
N.°
17C
N
-B -C -DS
ME
ye B
YB
MU
6
MV
6
MW
6
ME
6
MW
6
MV
6
ME
6
BA
6
MU
6C
N3-
2M
U6
CN
3-4
CN
3-6
CN
3-3
CN
3-5
CN
6-4
MV
6
MW
6
MV
6
ME
6
MW
6
ME
6
BA
6
CN
3-1
MU
6
CN
3-8
CN
3-7
MU
6M
V6
MW
6M
E6
BA
6
PE
X21
(8X
6)
MU
4
MV
4M
W4
MW
4
ME
4
BB
4
MV
4
ME
4
BA
4
X22
(8X
6)
BA
3 E
MU
4
BA
2
MU
3M
U3
MV
3M
V3
MW
3M
W3
BB
1
MU
2M
U2
MV
2M
V2
MW
2M
W2
ME
2M
E2E
MU
1M
V1
MV
1
MU
1
MW
1M
W1
ME
1M
E1
BA
1
MU
4C
N1-
2
CN
6-1
CN
1-4
CN
1-6
CN
1-3
CN
1-5
CN
6-2
MW
4
MV
4M
V4
ME
4
MW
4
BB
4
ME
4
BA
4
CN
1-3
CN
4-3
CN
4-1
CN
4-2
CN
4-4
CN
4-6
CN
4-5
CN
1-1
3BC
(8X
6)
CN
4-7
CN
4-8
ME
3
MU
4
ME
3
EBA
2
MV
3M
V3
MU
3M
U3
MW
3M
W3
CN
2-1
2BC
(8X
6)
CN
2-3
CN
2-2
CN
2-4
CN
2-5
CN
2-8
CN
2-7
CN
1-1
CN
2-6
CN
1-2
CN
3-3
CN
3-7
CN
3-2
CN
3-1
CN
3-6
CN
3-5
CN
3-4
CN
3-8
BB
1
MU
2M
U2
MV
2M
V2
ME
2M
E2
MW
2M
W2
MV
1M
U1
MV
1
MU
1
MW
1M
W1
ME
1M
E1
BA
1
E
MU
1M
V1
MW
1M
E1
BA
1B
B1
-B-A -A
N.°
8C
N
N.°
9C
N
-B -C -DS
ME
ye S
Rob
ot
SP
1
SP
3S
P2
SP
9
SP
5
SP
7S
P8
SP
6
SP
4
SP
11S
P10
SP
13S
P12
SP
15S
P14
SP
18S
P17
SP
16
654 7 8 9 10 11 1312 1615 1817 21201914
S1(
28-2
1) E
Zóca
lo
EE
P P P P P P PP
(22-
14)
N.°
7C
N
321 4 5 7 86 9 10 1312 1514 1716
E1811
E
E
E
E E
E E
SP
1
SP
3S
P2
SP
9
SP
5
SP
7S
P8
SP
6
SP
4
SP
11S
P10
SP
13S
P12
SP
15S
P14
SP
18S
P17
SP
16
P
E
MU
2M
V2
MW
2M
E2
-AN
.° 1
0CN
-B -C -DS
ME
ye L
BA
2B
B2
-B-AN
.° 1
1CN
YB
YB
CN
1-4
BA
3
MU
3M
V3
MW
3M
E3
-AN
.° 1
2CN
-B -C -DS
ME
ye U
BA
3B
B3
-B-AN
.° 1
3CN
YB
MU
4M
V4
MW
4M
E4
BA
4
8 - 45

Mantenimiento y control
9 Mantenimiento y control
PELIGRO!Peligro de muerte por electrocuciónTodas las labores de control y mantenimiento deben ser realizadas por personalespecializado.Es indispensable que siga las instrucciones mencionadas a continuación antes de efectuarel mantenimiento y las inspecciones. Desconecte la alimentación principal de voltaje. Coloque la señal de aviso específica, p.ej., "No conectar voltaje".. Instale el interruptor de reconexión prescrito.
Póngase en contacto con la filial YASKAWA de su domicilio si tiene dudas respecto aldesmontaje o las reparaciones.
INDICACIÓNLos datos de la posición cero se pierdenAntes de desenchufar el cable del codificador para hacer el mantenimiento o lasinspecciones: Conecte la unidad de batería de repuesto.
9 - 46

Mantenimiento y control
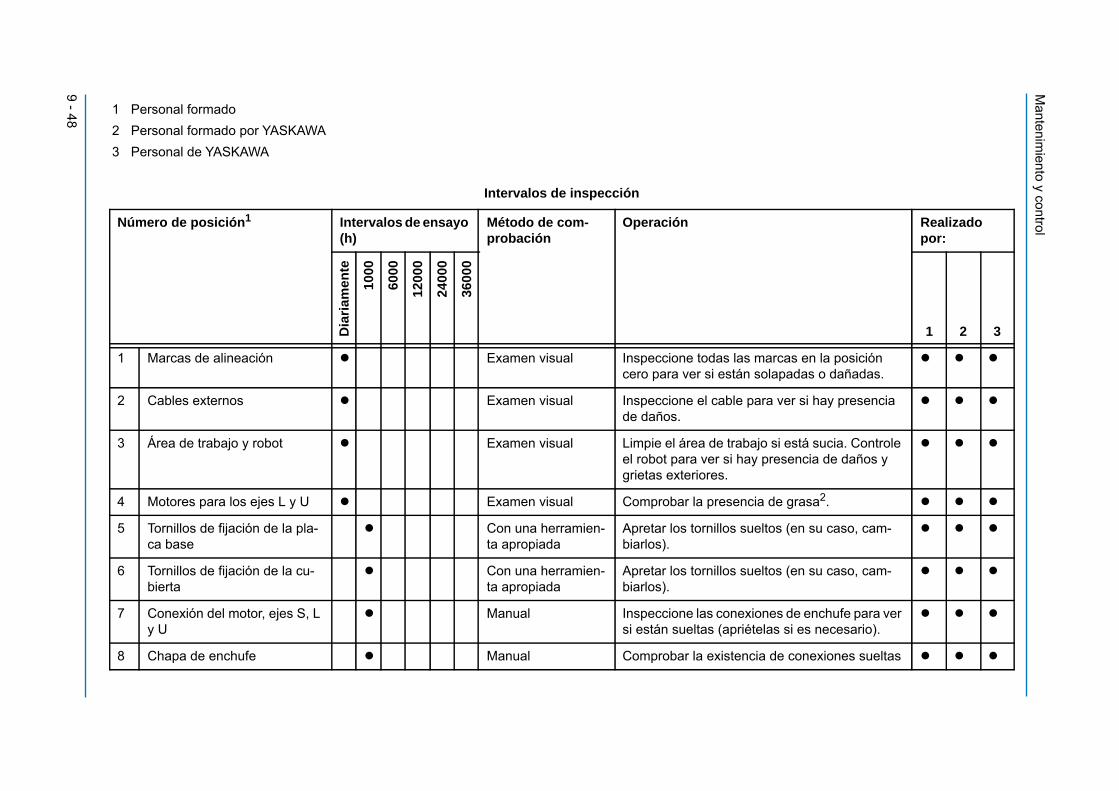
9.1 Calendario de inspecciones
Solamente las inspecciones realizadas cuidadosamente y a tiempo pueden garantizar elfunctionamiento seguro del robot. Las inspecciones, además, aseguran el uso continuo ypreciso a largo plazo, una vida útil óptima, previenen el desgaste excesivo y el malfuncionamiento. Las inspecciones están repartidas en varios intervalos (consulte la tablasiguiente).La tabla: "Intervalos de inspección" distribuye estos trabajos de acuerdo con 3 criterios:• Trabajos que tienen que ser hechos por el personal calificado.• Trabajos que tienen que ser hechos por el personal que ha recibido formación de
YASKAWA.• Trabajos que tienen que ser hechos por el personal de YASKAWA.Las inspecciones tienen que ser hechas exclusivamente por el personal que ha recibidoformación.
INDICACIÓN El tiempo de la SERVO-corriente es determinante para los intervalos de control
(véanse puntos 1 en el Fig. 9-1: "Tiempo de la SERVO-tensión"). La tabla de intervalos de inspección está concebida para los casos normales. Si hay divergencias, póngase en contacto con el departamento de servicio TCS de
YEU-R.
Fig. 9-1: Tiempo de la SERVO-tensión
La numeración en la figura ilustrada arriba corresponde a la numeración de la tabla.
SYS MONITORING TIME
DATA EDIT DISPLAY UTILITY
Main Menu ShortCut
CONTROL POWER TIME (1998/07/06 10:00 )2385:42'02
SERVO POWER TIME (1998/07/06 10:30 )36000:00'00
PLAYBACK TIME (1998/10/22 11:12 )2210:00'20
MOVING TIME (1998/10/22 15:30 )1875:15'30
OPERATING TIME (1998/10/22 16:12 )0:0'0
1
Short CutMain Menu
JOB CONTENT
000000010002000300040005000600070008000900100011
TEST01TOOL:CONTROL GROUP:R1S:0000
NOPSET B000 1SET B001 0MOVJ VJ=80.00MOVJ VJ=80.00DOUT OT#(10) ONTIMER T=3.00MOVJ VJ=80.00MOVJ VJ=100.00MOVJ VJ=100.00MOVJ VJ=100.00MOVJ VJ=100.00
Turn on servo power
JOB EDIT DISPLAY UTILITY
MOVJ VJ=0.78
S-
SELECT
X-S+
X+
L-Y-
L+Y+
U-Z-
U+Z+
R-X-
R+X+
B-Y-
B+Y+
T-Z-
T+Z+
TEACHPLAY
REMOTESTART HOLD
SLOW8- 8+
.
2
FAST
TESTSTART
HIGHSPEED
BWD FWD
INTERLOCK
WELDON/OFF
ASSIST
SERVO ON
CANCELSERVO
ONREADY
MAINMENU
AREAPAGE
GO BACKDIRECTOPEN
TOOL SEL
COORDMulti
LAYOUT
Multi
MANUAL SPEED
TOOL SELLAYOUT
ENTRYENTRY
DELETE
MODIFY
SHIFT
ENTER
INSERT
9
6
3
-.
2
5
87
4
1
0MOTIONTYPE
INFORMLIST
ROBOT
EX.AXIS
AUX
MAINMENU
SIMPLEMENU
SIMPLEMENU
COORD
SERVOON
READY
PAGE AREA
CANCEL
DIRECTOPEN
GO BACK
SERVO ON
SHIFT
E- E+
9 - 47
Mantenim
iento y control
9 - 48
Realizado por:
1 2 3
as las marcas en la posición i están solapadas o dañadas.
cable para ver si hay presencia
e trabajo si está sucia. Controle r si hay presencia de daños y
es.
resencia de grasa2.
illos sueltos (en su caso, cam-
illos sueltos (en su caso, cam-
conexiones de enchufe para ver (apriételas si es necesario).
xistencia de conexiones sueltas
1 Personal formado2 Personal formado por YASKAWA3 Personal de YASKAWA
Intervalos de inspección
Número de posición1 Intervalos de ensayo (h)
Método de com-probación
Operación
Dia
riam
ente
1000
6000
1200
0
2400
0
3600
0
1 Marcas de alineación Examen visual Inspeccione todcero para ver s
2 Cables externos Examen visual Inspeccione el de daños.
3 Área de trabajo y robot Examen visual Limpie el área del robot para vegrietas exterior
4 Motores para los ejes L y U Examen visual Comprobar la p
5 Tornillos de fijación de la pla-ca base
Con una herramien-ta apropiada
Apretar los tornbiarlos).
6 Tornillos de fijación de la cu-bierta
Con una herramien-ta apropiada
Apretar los tornbiarlos).
7 Conexión del motor, ejes S, L y U
Manual Inspeccione lassi están sueltas
8 Chapa de enchufe Manual Comprobar la e

Mantenim
iento y control
9 - 49
véase 9.4 "Indicaciones para re- la página 56.
paso del enchufe al zócalo y los edios moviendo manualmente
nspeccione la espiral protectora
ar la batería cuando se activa la obot ha estado funcionando
ar la batería cuando se activa la obot ha estado funcionando
fallas (haga cambios en dado 4 tiene que ser rellenada des-000 horas y tiene que ser cam-
de cada 12000 horas (lea el Relleno y cambio de grasa de los " de la página 58 y 9.4.2 "Relleno asa de los ejes manuales" de la elleno y cambio de grasa de los ).
Realizado por:
1 2 3
9 Cilindro de compensación Engrasadora Rellenar grasallenar grasa" de
10 Arnés de cables del robot Control visual, multí-metro
Inspeccione el enchufes intermlos alambres. I
Cambiar3
11 Articulación de ejes L y U Hay que cambialarma o si el r36000 horas.
12 Unidad de batería del robot Hay que cambialarma o si el r36000 horas.
13 Engranajes para los ejes S, L, U, R, B y TRodamiento de rodillos cruza-dos del eje U
Engrasadora Inspeccione lascaso). La grasapués de cada 6biada despuéscapítulo 9.4.1 "ejes principalesy cambio de grpágina 9.4.2 "Rejes manuales"
Intervalos de inspección
Número de posición1 Intervalos de ensayo (h)
Método de com-probación
Operación
Dia
riam
ente
1000
6000
1200
0
2400
0
3600
0

Mantenim
iento y control
9 - 50
mismo. En caso de dudas, póngase en contacto con su filial de
4.000 horas.
Realizado por:
1 2 3
Tab. 9-1: Intervalos de inspección
14 Revisión
1. Los números de las posiciones corresponden a la figura "Intervalos de inspección" ilustrada más adelante
2. Si sale grasa hacia fuera, puede ser una señal de que la grasa ha penetrado en el motor. Esto puede provocar daños en elYASKAWA.
3. El arnés interno de cables del robot (para los ejes S-, L-, U-, R-, B y T) tiene que ser cambiado después de la inspección de 2
4. Las grasas o los lubricantes empleados están mencionados en la tabla "Puntos de inspección y grasas utilizadas".
Intervalos de inspección
Número de posición1 Intervalos de ensayo (h)
Método de com-probación
Operación
Dia
riam
ente
1000
6000
1200
0
2400
0
3600
0

Mantenimiento y control
Fig. 9-2: Intervalos de control
A
A
4
AA
3BC
2BC
1BC
AIR
S1
FB
9 - 51

Mantenimiento y control
9.2 Indicación para la unidad de baterías
9.2.1 Cambie la unidad de baterías
Fig. 9-3: Posición de la unidad de baterías (vista frontal)
Las unidades de baterías se instalan de la manera representada en la figura "Posición dela unidad de baterías".Hay que cambiar la unidad de baterías de la manera descrita a continuación si se disparauna alarma en el mando robótico.1. Desconecte el mando robótico de la alimentación de tensión principal (véase Fig. 9-4:
"Interruptor principal en "posición OFF"").
Fig. 9-4: Interruptor principal en "posición OFF"
2. Retire los tornillos de la placa cobertora.
4 tornillos M4 ZócaloChapa de enchufe
Interruptor principal en "posición OFF"
AA
FB
3BC2BC
1BC
S1
AIR
1 32
with power ON.
WARNINGDo not open the doorHigh Voltage
1
1
9 - 52
Mantenimiento y control
3. Retire cuidadosamente la unidad de baterías de la base.
INDICACIÓNLos datos absolutos del codificador se pierden.Preste atención a que el enchufe no se desconecte de la placa de circuitos impresoscuando usted extraiga la unidad de baterías.
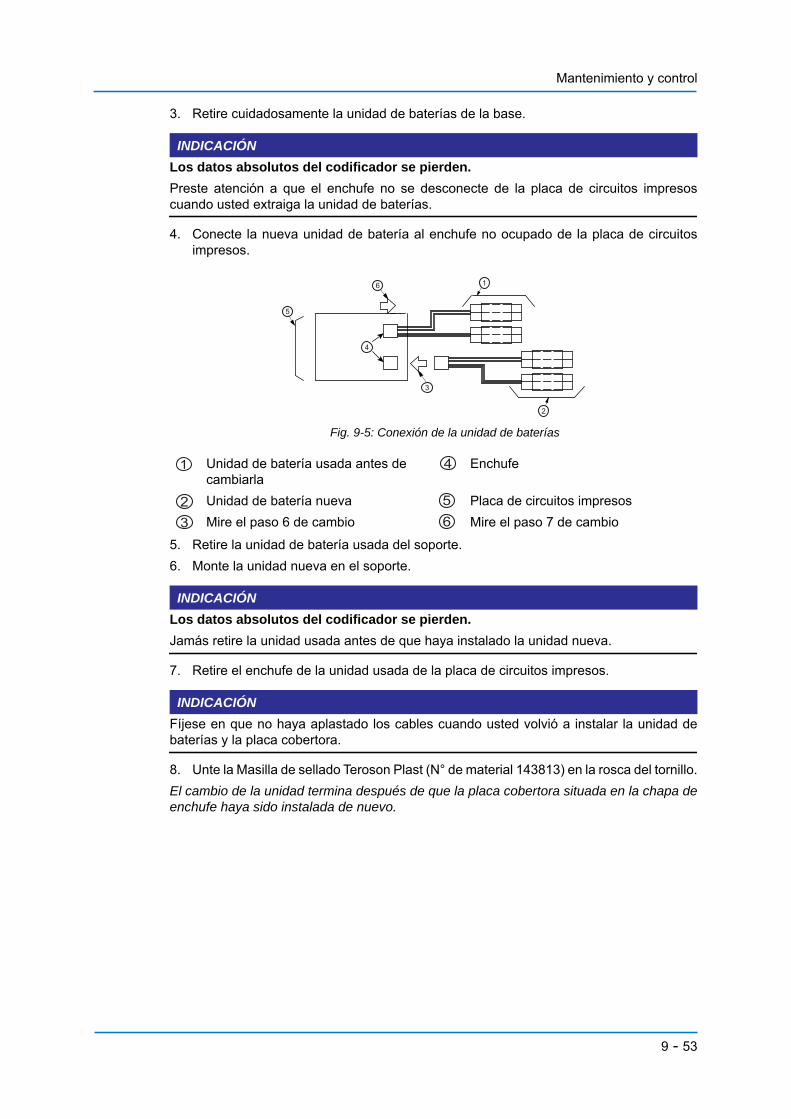
4. Conecte la nueva unidad de batería al enchufe no ocupado de la placa de circuitosimpresos.
Fig. 9-5: Conexión de la unidad de baterías
5. Retire la unidad de batería usada del soporte.6. Monte la unidad nueva en el soporte.
INDICACIÓNLos datos absolutos del codificador se pierden.Jamás retire la unidad usada antes de que haya instalado la unidad nueva.
7. Retire el enchufe de la unidad usada de la placa de circuitos impresos.
INDICACIÓNFíjese en que no haya aplastado los cables cuando usted volvió a instalar la unidad debaterías y la placa cobertora.
8. Unte la Masilla de sellado Teroson Plast (N° de material 143813) en la rosca del tornillo.El cambio de la unidad termina después de que la placa cobertora situada en la chapa deenchufe haya sido instalada de nuevo.
Unidad de batería usada antes de cambiarla
Enchufe
Unidad de batería nueva Placa de circuitos impresosMire el paso 6 de cambio Mire el paso 7 de cambio
5
1
2
3
6
4
1 4
2 53 6
9 - 53

Mantenimiento y control
9.2.2 Enchufe de la unidad de baterías (con etiqueta de advertencia)
Fig. 9-6: Diagrama de conexión de la unidad de batería para los ejes S, L y U
Hay que conectar la batería con el motor, fijándose en la figura reproducida a continuaciónantes de retirar el enchufe del codificador (con la etiqueta "CUIDADO").
Fig. 9-7: Diagrama de conexión de la unidad de baterías para los ejes R, B y T
Motor Unidad de bateríaEnchufe de red del motor Enchufe para copia de seguridadConexión de codificador
codificador Pegatina de advertenciaCable del motor Toma de corrienteUnidad de batería Arnés de cables del robota: Enchufe - Hembrillab: Enchufe - clavija
Motor
Conexión de codificador
b
aabOBT
BAT BATOBT*
4
1
23
5
1 42 53
Connect battery to encoder
to save the data beforerem
oving connector.
CA
UTIO
N
OBTBAT
OBT4BAT4
OBTBAT
OBT4BAT4
b
b
bb
a a
aa
1
2
3
4
5
6
7
9
8
1 62 73 84 9
5
9 - 54

Mantenimiento y control
9.3 Recomendación para el mantenimiento
INDICACIÓNLos datos absolutos del codificador se pierden.En caso de que se retire el enchufe de codificador sin conectar la unidad de batería, esposible que se pierdan los datos absolutos del codificador. Cuando se realicen tareas de mantenimiento como, por ejemplo, el cambio de un arnés
de cables del robot, es posible que sea necesario retirar el enchufe de codificador. Eneste caso, conecte la unidad de batería al enchufe de reserva de la batería antes deretirar el enchufe de codificador. La conexión de la batería está ilustrada en el capítulo9.2.1 "Cambie la unidad de baterías", página 52.
9 - 55

Mantenimiento y control
9.4 Indicaciones para rellenar grasa
Cerciórese de que las instrucciones sean acatadas. La inobservancia de estasinstrucciones puede causar daños al motor o al engranaje.
ATENCIÓN!Quemadura por lubricante calienteEl lubricante puede verse sometido a cierta presión y puede salpicar al abrir el agujeroroscado. Usar gafas de protección
INDICACIÓN Asegúrese de que el tapón del agujero haya sido extraído de la salida de grasa. Si no
lo extrae, la grasa penetra en el motor o se destruye el sellado del engranaje. Esopuede dañar el motor o el engranaje.
El reengrase o el cambio de grasa deben hacerse solamente a la temperatura deservicio.
Si no aparecen las inscripciones "IN" Y "OUT", la lubricación se realiza de abajo haciaarriba.
No instalar ninguna articulación, manguera o similares en el orificio de salida dellubricante. El motor se daña en esos casos.
Evite que penetre aire en el engranaje. Introduzca la grasa con una engrasadora. Si usa una bomba de lubricación automática, la presión tiene que ascender a 0,3 kPa. Establezca la tasa de inyección de grasa en 8 g/s como máximo. Si usa una prensa de grasa comercial, los valores límites no deben ser sobrepasados. Los robots con enganche de techo disponen de una abertura de salida de grasa y de
una abertura de entrada de grasa en posición inversa (relacionado con las ilustracionesdel manual de operación y mantenimiento).
Colocar un recipiente recogedor en la obertura por donde escapa el lubricante. El lubricante que haya sido sustituido debe desecharse de manera respetuosa con el
medio ambiente.
Tab. 9-2: Grasas utilizadas
Usted puede solicitar a YEU-R las hojas de datos de seguridad relacionadas con lasgrasas.
Puntos de control y grasas utilizadas
Grasas utilizadas N° de ma-terial
Piezas analizadas
Molywhite RE Nº 00 100274 Engranaje para todos los ejes y piño-nes R, B y T.
Grasa Gadus S2 V220 2 146745 Rodamiento de rodillos cruzados del eje U y se articulaciones, Cilindro de compensación
9 - 56
Mantenimiento y control
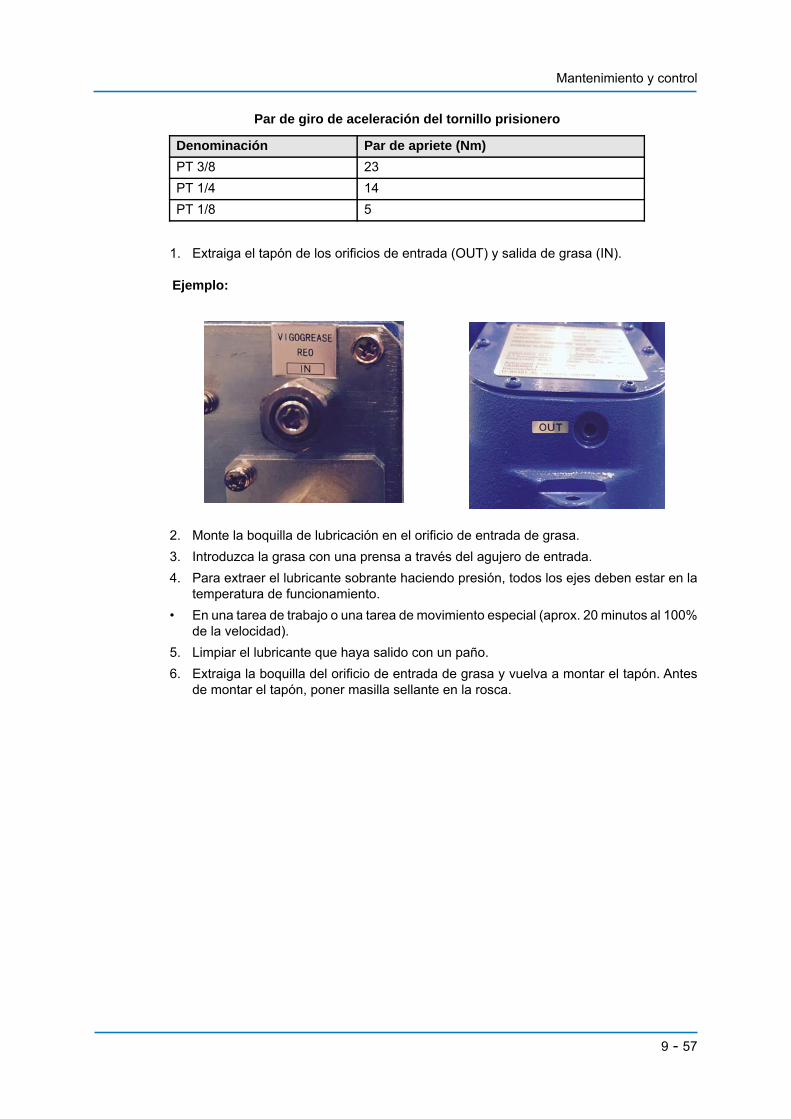
1. Extraiga el tapón de los orificios de entrada (OUT) y salida de grasa (IN).
2. Monte la boquilla de lubricación en el orificio de entrada de grasa.3. Introduzca la grasa con una prensa a través del agujero de entrada.4. Para extraer el lubricante sobrante haciendo presión, todos los ejes deben estar en la
temperatura de funcionamiento.• En una tarea de trabajo o una tarea de movimiento especial (aprox. 20 minutos al 100%
de la velocidad).5. Limpiar el lubricante que haya salido con un paño.6. Extraiga la boquilla del orificio de entrada de grasa y vuelva a montar el tapón. Antes
de montar el tapón, poner masilla sellante en la rosca.
Par de giro de aceleración del tornillo prisionero
Denominación Par de apriete (Nm)PT 3/8 23PT 1/4 14PT 1/8 5
Ejemplo:
9 - 57

Mantenimiento y control
9.4.1 Relleno y cambio de grasa de los ejes principales
Ilustración de los ejes Cantidad de grasaEngranaje del eje S Rellenar:
2600 cm³ / aprox. 2260 gCambiar:13000 cm³ / aprox. 11310 g1
1. El cambio de grasa se realiza cuando la grasa nueva aparece en la salida de grasa (el color de la grasa nuevaes diferente del de la grasa usada).
Engranaje del eje L Rellenar:600 cm³ / aprox. 520 gCambiar:1800 cm³ / aprox. 1560 g1
Engranaje del eje U Rellenar:600 cm³ / aprox. 520 gCambiar:1800 cm³ / aprox. 1560 g1
Orificio de salida de grasa
Orificio de entrada de grasa
A A
3BC2BC
1BCAIR
S1FB
1 2
9 - 58
Mantenimiento y control
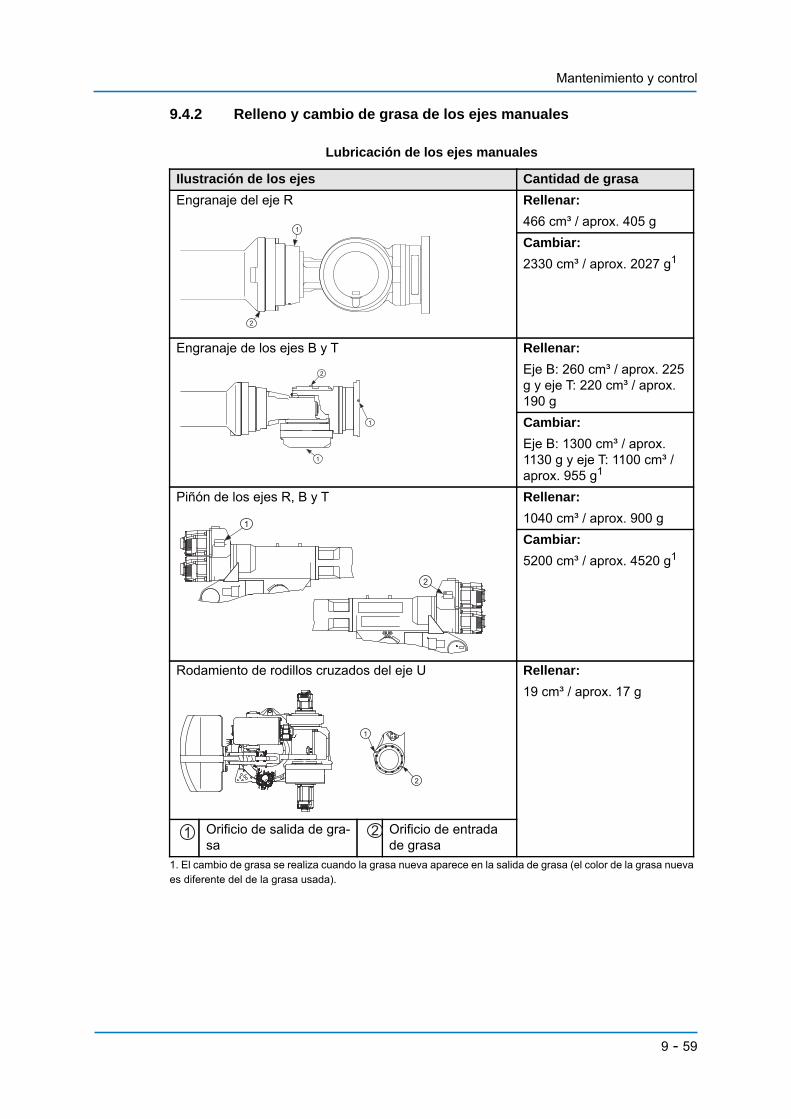
9.4.2 Relleno y cambio de grasa de los ejes manuales
Lubricación de los ejes manuales
Ilustración de los ejes Cantidad de grasaEngranaje del eje R Rellenar:
466 cm³ / aprox. 405 gCambiar:2330 cm³ / aprox. 2027 g1
1. El cambio de grasa se realiza cuando la grasa nueva aparece en la salida de grasa (el color de la grasa nuevaes diferente del de la grasa usada).
Engranaje de los ejes B y T Rellenar:Eje B: 260 cm³ / aprox. 225 g y eje T: 220 cm³ / aprox. 190 gCambiar:Eje B: 1300 cm³ / aprox. 1130 g y eje T: 1100 cm³ / aprox. 955 g1
Piñón de los ejes R, B y T Rellenar:1040 cm³ / aprox. 900 gCambiar:5200 cm³ / aprox. 4520 g1
Rodamiento de rodillos cruzados del eje U Rellenar:19 cm³ / aprox. 17 g
Orificio de salida de gra-sa
Orificio de entrada de grasa
1 2
9 - 59

Mantenimiento y control
9.4.3 Relleno de grasa en las articulaciones
9.4.4 Relleno y cambio de grasa del cilindro de compensación
Lubricación de los ejes manuales
Ilustración de los ejes Cantidad de grasaRodamiento de rodillo cónico Rellenar:
9 cm³ / aprox. 8 g
Orificio de salida de gra-sa
Orificio de entrada de grasa
Lubricación de los ejes manuales
Ilustración de los ejes Cantidad de grasaCilindro de compensación Rellenar:
5 cm³ / aprox. 4.5 g
Orificio de salida de gra-sa
Orificio de entrada de grasa
1 2
1 2
9 - 60

Mantenimiento y control
9.5 Ajustar la primera posición cero
Acate las instrucciones de seguridad mencionadas en el capítulo 1.7 "Seguridad" en lapágina 9 .
INDICACIÓN La "enseñanza" o el modo automático no se deben ejecutar antes de haber configurado
la posición cero. Hay que "enseñar" y guardar inmediatamente otra posición de prueba después de
haber instalado el sistema robótico. La segunda posición de prueba puede serefectuada, p.ej., con puntas (puntas enroscadas en el soplete, contrapieza fija en lapared de la celda) y guardada en el mando robótico.
Después de un choque o si se dan desviaciones, se recomienda no "enseñar" tareasindividuales sino ir a la posición inicial o a la segunda posición cero y reajustarlas.
Después de cada choque o paradas de emergencia, hay que llevar el robot con elmodo de ajuste a su posición inicial y chequear la posición cero.
Hay que configurar la posición cero antes de ejecutar la función Teach o emplear elmodo automático en un sistema con dos o más robots.
Para obtener más información, consulte el manual de configuración del sistema opóngase en contacto con su representante de YASKAWA.
La posición del codificador absoluto tiene que coincidir al efectuar el ajuste de la posicióncero. Aunque esta configuración tiene lugar en fábrica, es necesario efectuarlanuevamente en los siguientes casos.• Cambio de la combinación entre robot y el mando robótico.• Cambio del motor o del codificador absoluto.• Borradura de la memoria por sustitución de la tarjeta principal (CPU) o por unidad de
baterías casi descargada, etc.).• Divergencia de la posición cero por choque del robot.Ajuste de la posición ceroUtilice las teclas de los ejes para configurar en cada eje la marca de posición cero, de modoque el robot pueda asumir sus posiciones como posición cero. Para configurar la posición cero es necesario efectuar dos procesos:• Todos los ejes pueden ser movidos simultáneamente.
– Ajuste una nueva posición cero si la combinación del robot y la tarjeta principal(CPU) han cambiado. Ajuste la posición cero moviendo simultáneamente todos losejes.
• Los ejes pueden ser desplazados individualmente.– Ajuste de nuevo la posición cero para los ejes individuales si ha cambiado el motor
o el codificador absoluto.Si ya conoce los datos absolutos de la posición cero, ajústelos después de haberregistrado dicha posición.
INDICACIÓNLa ventana para calibrar la posición de salida aparece indicada solamente si el modo deseguridad ha sido configurado como modo de gestión.
9 - 61

Mantenimiento y control
9.5.1 Registrar todos los ejes
1. Seleccione {ROBOT} en el menú principal.Se abre el submenú.
2. Seleccione {HOME POSITION}.Se abre la ventana <HOME POSITIONING>.
9 - 62

Mantenimiento y control
3. Seleccione {DISPLAY}.La menú de barras se abre.
A través del botón {PAGE} se puede ejecutar la misma acción que en el paso 3. En estecaso aparece un cuadro de selección.
4. Seleccione el componente que desea calibrar (p.ej., R1: ROBOT).Seleccione el grupo de mando {HOME POSITIONING}.El grupo de mando también puede seleccionarse con la tecla de página .
5. Seleccione {EDIT} en el menú principal.La menú de barras se abre.
9 - 63

Mantenimiento y control
6. Seleccione {SELECT ALL AXES}.Se abre el diálogo de confirmación.
7. Seleccione {YES}.Los datos de la posición indicada para todos los ejes quedan registrados como posicióncero.Si se selecciona {NO} se cancelará el registro.
9 - 64

Mantenimiento y control
9.5.2 Registrar ejes individuales
1. Seleccione {ROBOT} en el menú principal.Se abre el submenú.
2. Seleccione {HOME POSITION}.3. Seleccione el componente que desea calibrar (p.ej., R1: ROBOT).
Ejecute los pasos 3 y 4 de la manera indicada en el capítulo 9.5.1 "Registrar todos losejes", en la página ExternalLink: Registrieren aller Achsenpara seleccionar el grupo demando deseado.
4. Desplace el cursor hacia el eje que desee registrar y selecciónelo.
Se abrirá el diálogo de confirmación.
5. Seleccione {YES}.Los datos de la posición indicada para los ejes seleccionados quedan registradoscomo posición cero.Si se selecciona {NO} se cancelará el registro.
9 - 65

Mantenimiento y control
9.5.3 Cambio de datos absolutos
Una vez que haya configurado la posición cero, cambie los datos absolutos del eje de lasiguiente manera:1. Seleccione {ROBOT} en el menú principal.
Se abre el submenú.2. Seleccione {HOME POSITION}.3. Seleccione el componente que desee calibrar.
Ejecute los pasos 3 y 4 de la manera indicada en el capítulo 9.5.1 "Registrar todos losejes" de la página 62 para seleccionar el grupo de mando deseado.
4. Seleccione los datos absolutos que desee registrar.
5. Introduzca los datos absolutos con las teclas numéricas.6. Seleccione {ENTER}.
Se modificarán los valores absolutos.
9 - 66

Mantenimiento y control
9.5.4 Borradura de datos absolutos
Una vez que haya configurado la posición cero, elimine los datos absolutos del eje de lasiguiente manera:1. Seleccione {ROBOT} en el menú principal.
Se abre el submenú.2. Seleccione {HOME POSITION}.
Ejecute los pasos 3 y 4 de la manera indicada en el capítulo 9.5.1 "Registrar todos losejes" de la página 62 para seleccionar el grupo de mando deseado.
3. Seleccione {DATA} en el menú principal.La menú de barras se abre.
4. Seleccione {CLEAR ALL DATA}.Se abrirá el diálogo de confirmación.
5. Seleccione {YES}.Se borrarán los valores absolutos.
Si se selecciona {NO} se cancelará el registro.
9 - 67

Mantenimiento y control
9.6 Ajustar la segunda posición cero (punto de chequeo).
9.6.1 Objetivo de la comprobación de posición
Si el número absoluto de revoluciones detectado con tensión "ON" no coincide con losdatos que el transmisor de valor absoluto guardó cuando se desconectó por última vez latensión, aparecerá un mensaje de error.Este mensaje de error puede tener dos causas:• Error en el sistema generador de impulsos• Se movió el robot después de haber desconectado la alimentación de tensión.El modo automático no está disponible si se dispara la alarma "FUERA DE MARGEN(DATOS ABSOLUTOS)". Es necesario revisar la posición cero.
Si se activa la alarma "FUERA DE MARGEN (DATOS ABSOLUTOS)":
Compare el segundo sistema genera-dor de impulsos (punto de comproba-ción)* con los impulsos de posición actuales.
Resetear alarma La alarma vuelve a activarseConectar el servovoltaje Corrija el eje incorrecto, sustituya el
sistema generador de impulsos, ajus-te la posición cero
Procedimiento después de una alar-ma
* Punto de comprobación de posición
Confirmación de posición Modo automático disponible
OK
NOK
1 6
2 73 8
4 9
5 10
9 - 68

Mantenimiento y control
Control de posiciónSi se activa la alarma "FUERA DE MARGEN (DATOS ABSOLUTOS)", ejecute unmovimiento con las teclas de ejes hasta la segunda posición cero y compruebe la posición.El modo automático, los tests y el movimiento FWD (avance) no pueden ser ejecutados sino se lleva a cabo la comprobación de posición "CONFIRMAR POSICIÓN".Comprobación de desviación de impulsoEl número de impulsos en la segunda posición cero se compara con el de la posiciónactual. El modo automático puede ejecutarse si la desviación se encuentra dentro delmargen permitido.De no ser así, se emitirá nuevamente el mensaje de error.
INDICACIÓN El impulso para el margen permitido es el número de impulsos por cada revolución del
motor (datos PPR). El valor de partida de la segunda posición cero es la posición cero en la cual todos los
ejes tienen el impulso 0. La segunda posición cero se puede modificar. Encontrará másinformación en 9.6.2 "Procedimiento para configurar la segunda posición cero" en lapágina70.
Mensaje de alarmaSi vuelve a activarse la alarma, es posible que el error tenga su origen en el sistemagenerador de impulsos. Compruebe el sistema generador de impulsos. Después de haberajustado el eje defectuoso, configure la posición cero del eje y vuelva a comprobar laposición.
INDICACIÓNCon al ajuste simultáneo de la posición cero para todos los ejes, el modo automático puedeejecutarse sin necesidad de llevar a cabo la comprobación de posición.Pese a todo, lleve a cabo por norma general la comprobación de posición "CONFIRMARPOSICIÓN". Si se dan las condiciones especiales previamente indicadas, el robot semueve de la siguiente manera: Al principio, el robot se desplaza a baja velocidad (1/10 de la velocidad máxima) hasta
el paso marcado por el cursor. Si durante este movimiento el robot se detiene y sevuelve a poner en marcha, se mantiene la velocidad hasta que se alcance el pasomarcado por el cursor.
Independientemente del ciclo configurado, el robot se detiene después de haberalcanzado el paso marcado por el cursor. Cuando se vuelve a poner en marcha elrobot, éste se desplaza a la velocidad programada y con el ciclo programado del JOB.
9 - 69

Mantenimiento y control
9.6.2 Procedimiento para configurar la segunda posición cero
Aparte de la posición inicial del robot, puede configurarse la segunda posición inicial comopunto de comprobación para los valores absolutos. Aplique los pasos siguientes paraconfigurar un punto determinado.
INDICACIÓNSi 2 o más robots o estaciones son controladas por un mando, debe configurarse lasegunda posición cero para cada robot o estación.
1. Seleccione {ROBOT} en el menú principal.- Se abre el submenú.
2. Seleccione {SECOND HOME POS}.Aparece la ventana {SECOND HOME POS}. Se emite el mensaje "Available to moveto and modify specified point" (Disponible para movimiento y modificación de puntoespecificado).
9 - 70

Mantenimiento y control
3. Pulse la tecla de páginas o escoja {PAGE} para activar la ventana de seleccióndel grupo de mando.Seleccione el grupo de ejes con el que usted desee ajustar la segunda posición cerosi hay más de dos o más grupos.
4. Pulse las teclas de ejes.- Desplace el robot hacia la segunda posición cero nueva.
5. Pulse {MODIFY}, luego {ENTER}.- Cambiará la segunda posición cero.
9.6.3 Procedimiento después de una alarma
Preste atención a las instrucciones de seguridad mencionadas en el capítulo 1.7"Seguridad" de la página 9 .
ADVERTENCIA!Muerte o lesiones por aplastamientoSi se presentan irregularidades en el sistema PG, ellas activan la alarma y el robot puedehacer movimientos imprevistos.
Si se activa la alarma "FUERA DE ÁREA (VALORES ABSOLUTOS)", hay que• reiniciar la alarma;• conectar la SERVO-tensión.Confirme luego la segunda posición cero. Si la causa del error radica en el sistema PG,adopte la medida adecuada después la confirmación (p.ej., sustitución del sistema PG,etc.).Los datos de posición actuales del robot, al conectar y desconectar la alimentaciónprincipal de tensión, pueden confirmarse en la ventana {POWER ON/OFF POS}.1. Seleccione {ROBOT} en el menú principal.
Se abre el submenú.
9 - 71

Mantenimiento y control
2. Seleccione {SECOND HOME POS} en el menú principal.Aparecerá la ventana SEGUNDA POSICIÓN CERO.
3. Pulse la tecla de páginas o escoja {PAGE} para activar la ventana de seleccióndel grupo de mando.Seleccione el grupo de ejes con el que usted desee ajustar la segunda posición cerosi hay más de dos o más grupos.
4. Pulse {FWD}.El TCP se desplazará hacia la segunda posición cero. La velocidad de desplazamientodel robot se configura como velocidad seleccionada en el funcionamiento manual.
5. Seleccione {DATA} en el menú.6. Seleccione {CONFIRM POSITION}.
Aparecerá el aviso "Posición cero comprobada".Los datos de los impulsos de la segunda posición cero son comparados con los datosactuales de los impulsos. El modo automático funciona si el error de comparación seencuentra dentro del margen permitido.Si el error de comparación no se encuentra dentro de la gama permitida se volverá aemitir el mensaje de error.
9 - 72

Piezas de repuesto recomendadas
10 Piezas de repuesto recomendadasRecomendamos que almacene las piezas y los componentes mencionados en la tabla deabajo para tenerlos como repuestos. Si utiliza piezas de repuesto no fabricadas porYASKAWA, no se podrá garantizar la potencia del producto.
INDICACIÓNPóngase en contacto con la filial de YASKAWA de su domicilio si necesita repuestos opiezas de desgaste.
Lista de piezas de repuesto robot
Denominación N° de pieza de repuesto N° de mate-rial
Grasa Molywhite RE Nº 0 100274Grasa Grasa Gadus S2 V220 2 146745Masilla sellante Teroson Plast 143813Unidad de batería Robot 128708Unidad de batería Mando 155543Arnés de cables HW1171911-A 173544Chapa de enchufe HW1371950-A 173545Unidad de muñeca HW0173794-A 173543Placa de batería SGDR-EFBA02A 154241Eje S:Engranaje HW0281310-A 146402PiñónMotor SGMRV-44ANA-YR1* 164408Eje L:Engranaje HW0390225-A 157536PiñónMotor SGMRV-37ANA-YR1* 144071Eje U:Engranaje HW0390225-B 157507PiñónMotor SGMRV-37ANA-YR1* 144071Eje R:Engranaje HW0380393-A 112582Motor SGMRV-30ANA-YR1* 144108Eje B:Engranaje HW0381033-B 173941Motor SGMRV-30ANA-YR1* 144108Eje T:Engranaje HW0385316-A 154216Motor SGMRV-30ANA-YR1* 144108
10 - 73

Piezas de repuesto recomendadas
Lista de piezas de repuesto control del robot
Denominación N° de pieza de repuesto N° de mate-rial
Alimentación eléctrica JZNC-YPS21-E 164754Conector adicional de energía JZNC-YPS02-E 147571Bastidor de CPU JZNC-YRK21-1E 164756Placa de circuitos CPU JANCD-YCP21-E 168996Panel I/F del robot JANCD-YIF01-2E 145855Platina de seguridad de la máquina en la CPU
JANCD-YSF21-E 164757
Platina de seguridad E/S JANCD-YSF22-E 169501Platina E/S general (tipo PNP) JANCD-YIO22-E 164762Unidad de alimentación (cat. 4) JZRCR-YPU52-1 164764Platina para eje SRDA-EAXA21A 170650Convertidor SRDA-COA30A21B-E 164767Módulo capacitivo (tipo 12A) SRDA-CUA662AA 164781Servoamplificador S SRDA-SDA71A01A-E 144169Servoamplificador L SRDA-SDA71A01A-E 144169Servoamplificador U SRDA-SDA71A01A-E 144169Servoamplificador R SRDA-SDA71A01A-E 144169Servoamplificador B SRDA-SDA71A01A-E 144169Servoamplificador T SRDA-SDA71A01A-E 144169Terminal SMVK500W6R0J A5978 143574Medio de almacenamiento (Compact-Flash)
MCF10P256MS(A00ACIYE) 151281
10 - 74
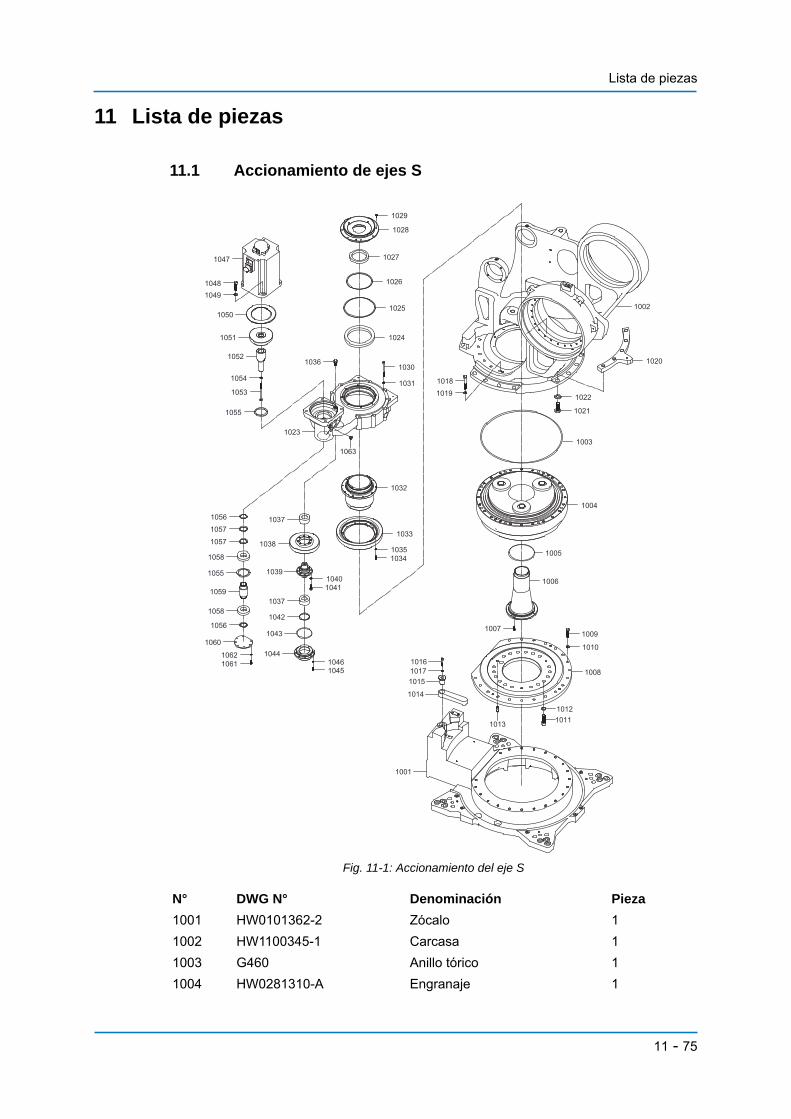
Lista de piezas
11 Lista de piezas
11.1 Accionamiento de ejes S
Fig. 11-1: Accionamiento del eje S
N° DWG N° Denominación Pieza1001 HW0101362-2 Zócalo 11002 HW1100345-1 Carcasa 11003 G460 Anillo tórico 11004 HW0281310-A Engranaje 1
1002
1003
1004
1005
1006
1007
1008
1009
1010
101210111013
1014
1015
10161017
10181019
1020
1021
1022
1023
1024
1025
1026
1027
1028
1029
1030
1031
1032
1033
10341035
1036
1037
1038
1039
1037
10401041
1042
1043
104410461045
1047
10491048
1050
1051
1052
1054
1053
1055
1056
1057
1057
1058
1055
1059
1058
1056
1060
10621061
1063
1001
11 - 75

Lista de piezas
1005 G145 Anillo tórico 11006 HW0314989-1 Eje 11007 M6 x 20 Tornillo 41008 HW0315256-1 Brida 11009 M12 x 45 Tornillo 211010 2H-12 Placa 211011 M16 x 50 Tornillo 181012 2H-16 Placa 181013 KQS10-01S Conexión 11014 HW0402102-3 Tope 11015 HW9404486-1 Eje 11016 M8 x 45 Tornillo 11017 2H-8 Placa 11018 M12 x 80 Tornillo 171019 2H-12 Placa 171020 HW0307574-1 Tope 11021 M20 x 45 Tornillo 31022 M20 Placa 31023 HW0101152-2 Carcasa 11024 6828ZZ Cojinete 11025 AR175 Anillo de retención Seeger 11026 WR140 Anillo de retención Seeger 11027 TC8511013 Retén de aceite 11028 HW0308464-1 Brida 11029 M5 x 16 Tornillo 81030 M8 x 100 Tornillo 101031 2H-8 Placa 101032 HW0307564-2 Piñón 11033 HW0307562-1 Piñón 11034 M6 x 20 Tornillo 101035 2H-6 Placa 101036 M12 x 20 Tornillo 11037 HR33206J Cojinete 21038 HW0307563-1 Piñón 11039 HW9405047-1 Eje 11040 M8 x 25 Tornillo 81041 2H-8 Placa 81042 HW9405304-* Arandela de ajuste *1043 G85 Anillo tórico 11044 HW9405048-1 Carcasa 11045 M5 x 16 Tornillo 7
N° DWG N° Denominación Pieza
11 - 76

Lista de piezas
Tab. 11-1: Lista de piezas del accionamiento de ejes S
1046 2H-5 Placa 71047 SGMRV-44ANA-YR1* Motor 11048 M12 x 45 Tornillo 41049 2H-12 Placa 41050 HW0402627-2 Placa 11051 HW0407533-1 Disco volante 11052 HW0307565-3 Eje 11053 M8 x 115 Tornillo 11054 2H-8 Placa 11055 IRTW-72 Anillo de retención Seeger 21056 ISTW-35 Anillo de retención Seeger 21057 CIMR35-1 Arandela de ajuste 21058 6207ZZ Cojinete 21059 HW9381477-B Piñón 11060 HW9405051-1 Cubierta 11061 M5 x 16 Tornillo 71062 2H-5 Placa 71063 PT3/8 Tornillo prisionero 1
N° DWG N° Denominación Pieza
11 - 77

Lista de piezas
11.2 Accionamiento de ejes L
Fig. 11-2: Accionamiento del eje L
N° DWG N° Denominación Pieza2001 HW0390225-A Engranaje 12002 G300 Anillo tórico 22003 HW0304836-1 Carcasa 22004 PT1/8 Tornillo prisionero 52005 PT3/8 Tornillo prisionero 3
1002
2001
2002
2003
2004
2008
2005
20062007
2009
20102011
2012
2013
2014
2017
2019
2021
2018
2020
2022
2023
2024
2016
2015
2035
20262027
2025
2029
2028
2030
2002
2003
20042008
2005
20322031
2009
20102011
20342033
2036
2037
2019
2021
2020
2038
2017
2014
20402039
2041
2004
2004
20042043
2042
20452044
2046
2047
2048
20502049
2048
2051
20522053
2005
20552056
2054
11 - 78

Lista de piezas
2006 M12 x 75 Tornillo 162007 2H-12 Placa 162008 Y567812.5 Retén de aceite 22009 HW0304835-1 Carcasa 22010 TSH6-01M Conexión 22011 UB0640-0.1C Tubo flexible 22012 M10 x 30 Tornillo 42013 2H-10 Placa 42014 SGMRV-37ANA-YR1* Motor 22015 M12 x 40 Tornillo 42016 2H-12 Placa 42017 HW0402627-1 Placa 22018 HW1402871-1 Manguito 12019 HW0401145-2 Eje 22020 HW9481343-A Eje 22021 HW0408806-1 Placa 22022 HW0481836-A Tornillo 12023 HW1401163-A Piñón 12024 ISTW-12 Anillo de retención Seeger 12025 HW1302251-1 Eje 12026 M12 x 35 Tornillo 212027 2H-12 Placa 212028 M16 x 100 Tornillo 62029 2H-16 Placa 62030 HW0390225-B Engranaje 12031 M12 x 75 Tornillo 162032 2H-12 Placa 162033 M10 x 30 Tornillo 42034 2H-10 Placa 42035 ISTW-10 Anillo de retención Seeger 12036 HW0301778-1 Piñón 12037 HW0481836-C Tornillo 12038 HW0404884-2 Disco volante 12039 M12 x 40 Tornillo 42040 2H-12 Placa 42041 HW1100346-1 Brazo L 12042 M16 x 60 Tornillo 62043 2H-16 Placa 62044 M12 x 50 Tornillo 212045 2H-12 Placa 212046 HW9381003-1 Anillo 1
N° DWG N° Denominación Pieza
11 - 79
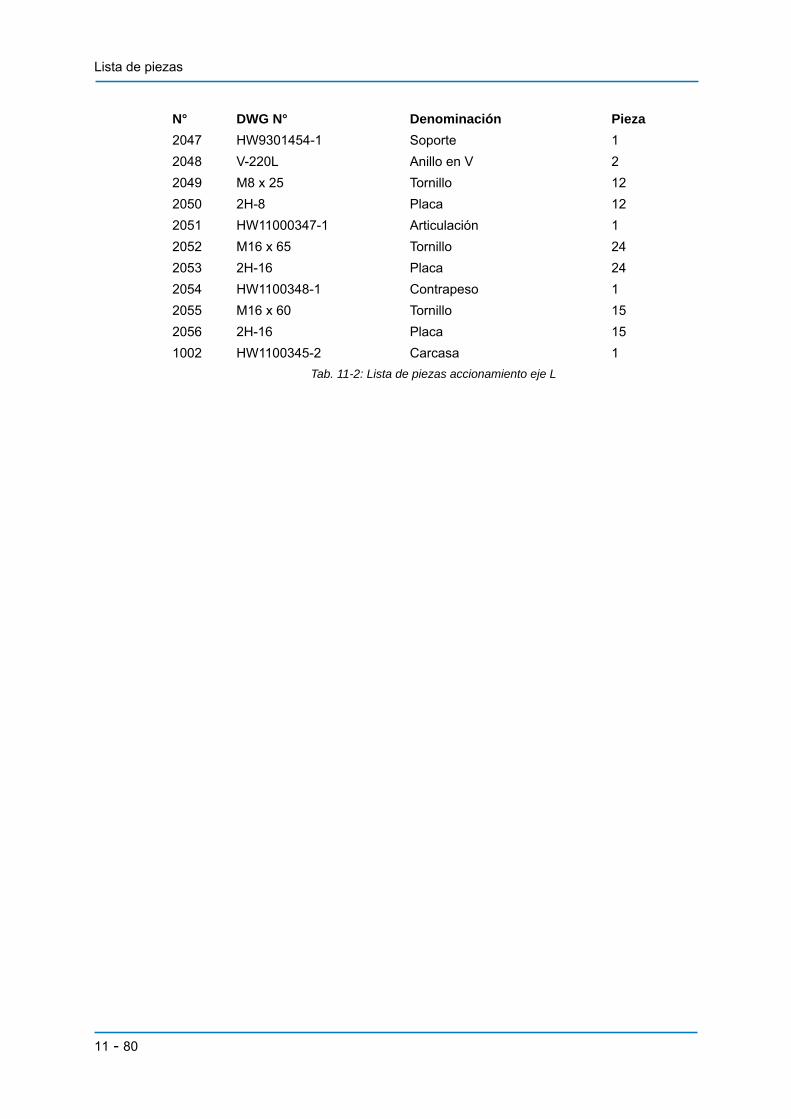
Lista de piezas
Tab. 11-2: Lista de piezas accionamiento eje L
2047 HW9301454-1 Soporte 12048 V-220L Anillo en V 22049 M8 x 25 Tornillo 122050 2H-8 Placa 122051 HW11000347-1 Articulación 12052 M16 x 65 Tornillo 242053 2H-16 Placa 242054 HW1100348-1 Contrapeso 12055 M16 x 60 Tornillo 152056 2H-16 Placa 151002 HW1100345-2 Carcasa 1
N° DWG N° Denominación Pieza
11 - 80
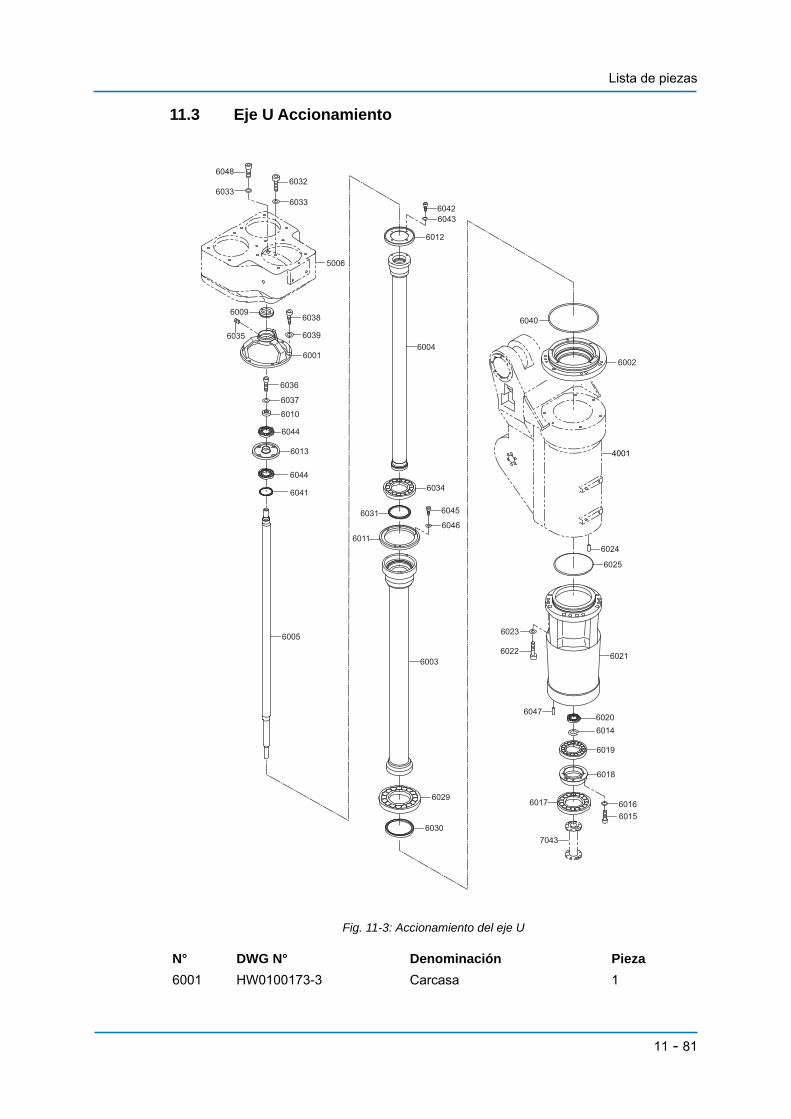
Lista de piezas
11.3 Eje U Accionamiento
Fig. 11-3: Accionamiento del eje U
N° DWG N° Denominación Pieza6001 HW0100173-3 Carcasa 1
60016002
6003
6004
6005
6009
6010
6011
6012
6013
6014
60156016
7043
6017
6018
6019
60206047
60216022
6023
6025
6033
6029
6030
6031
60326033
6048
6034
6035
6036
6037
6038
6039
6041
6042
6046
6044
6044
6045
6043
6024
6040
4001
5006
11 - 81
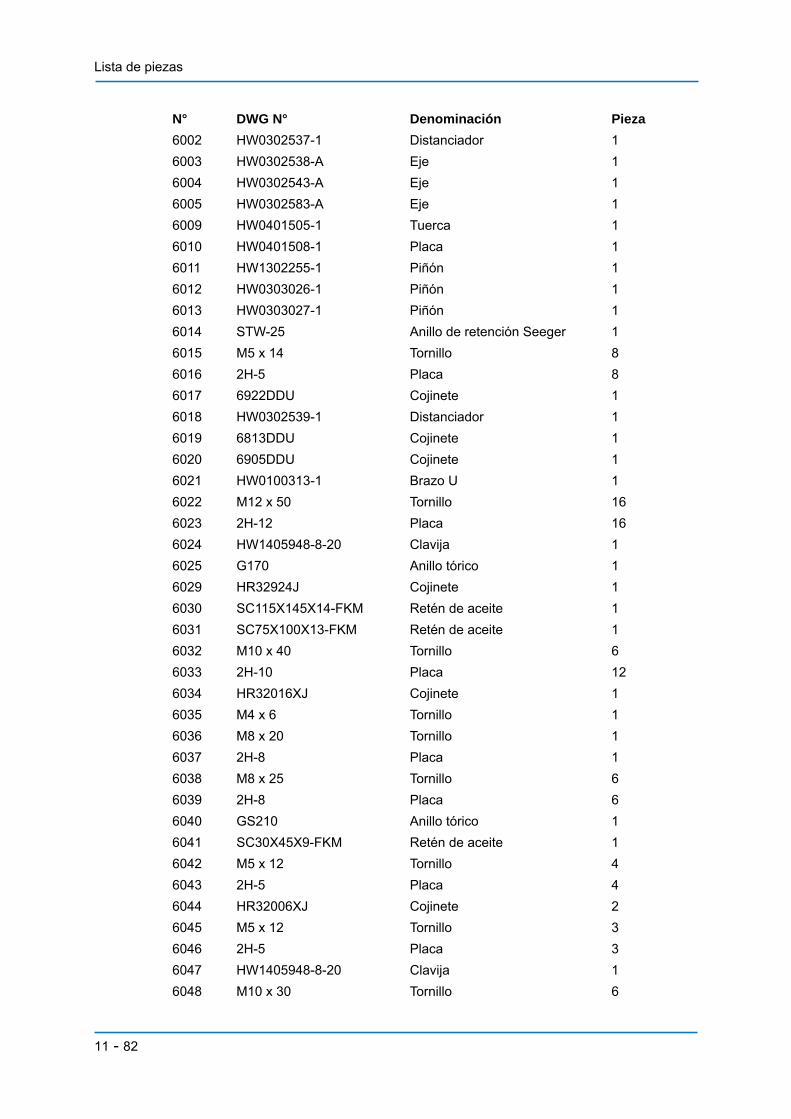
Lista de piezas
6002 HW0302537-1 Distanciador 16003 HW0302538-A Eje 16004 HW0302543-A Eje 16005 HW0302583-A Eje 16009 HW0401505-1 Tuerca 16010 HW0401508-1 Placa 16011 HW1302255-1 Piñón 16012 HW0303026-1 Piñón 16013 HW0303027-1 Piñón 16014 STW-25 Anillo de retención Seeger 16015 M5 x 14 Tornillo 86016 2H-5 Placa 86017 6922DDU Cojinete 16018 HW0302539-1 Distanciador 16019 6813DDU Cojinete 16020 6905DDU Cojinete 16021 HW0100313-1 Brazo U 16022 M12 x 50 Tornillo 166023 2H-12 Placa 166024 HW1405948-8-20 Clavija 16025 G170 Anillo tórico 16029 HR32924J Cojinete 16030 SC115X145X14-FKM Retén de aceite 16031 SC75X100X13-FKM Retén de aceite 16032 M10 x 40 Tornillo 66033 2H-10 Placa 126034 HR32016XJ Cojinete 16035 M4 x 6 Tornillo 16036 M8 x 20 Tornillo 16037 2H-8 Placa 16038 M8 x 25 Tornillo 66039 2H-8 Placa 66040 GS210 Anillo tórico 16041 SC30X45X9-FKM Retén de aceite 16042 M5 x 12 Tornillo 46043 2H-5 Placa 46044 HR32006XJ Cojinete 26045 M5 x 12 Tornillo 36046 2H-5 Placa 36047 HW1405948-8-20 Clavija 16048 M10 x 30 Tornillo 6
N° DWG N° Denominación Pieza
11 - 82
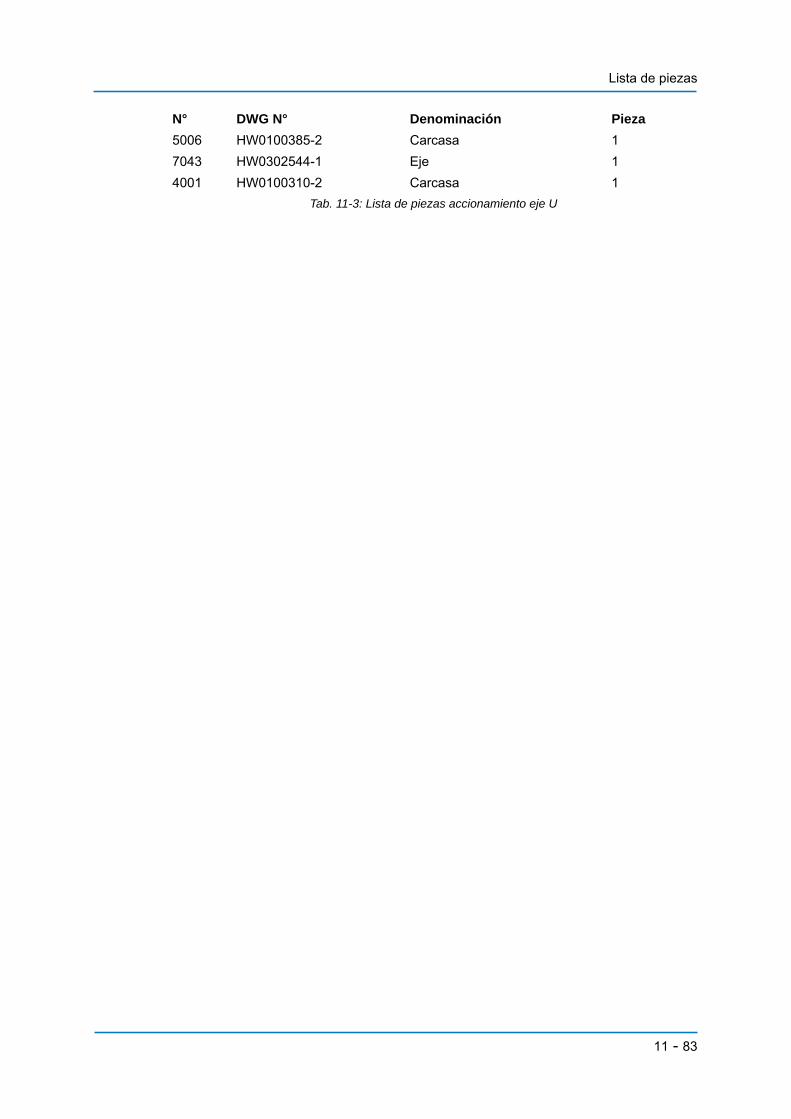
Lista de piezas
Tab. 11-3: Lista de piezas accionamiento eje U
5006 HW0100385-2 Carcasa 17043 HW0302544-1 Eje 14001 HW0100310-2 Carcasa 1
N° DWG N° Denominación Pieza
11 - 83
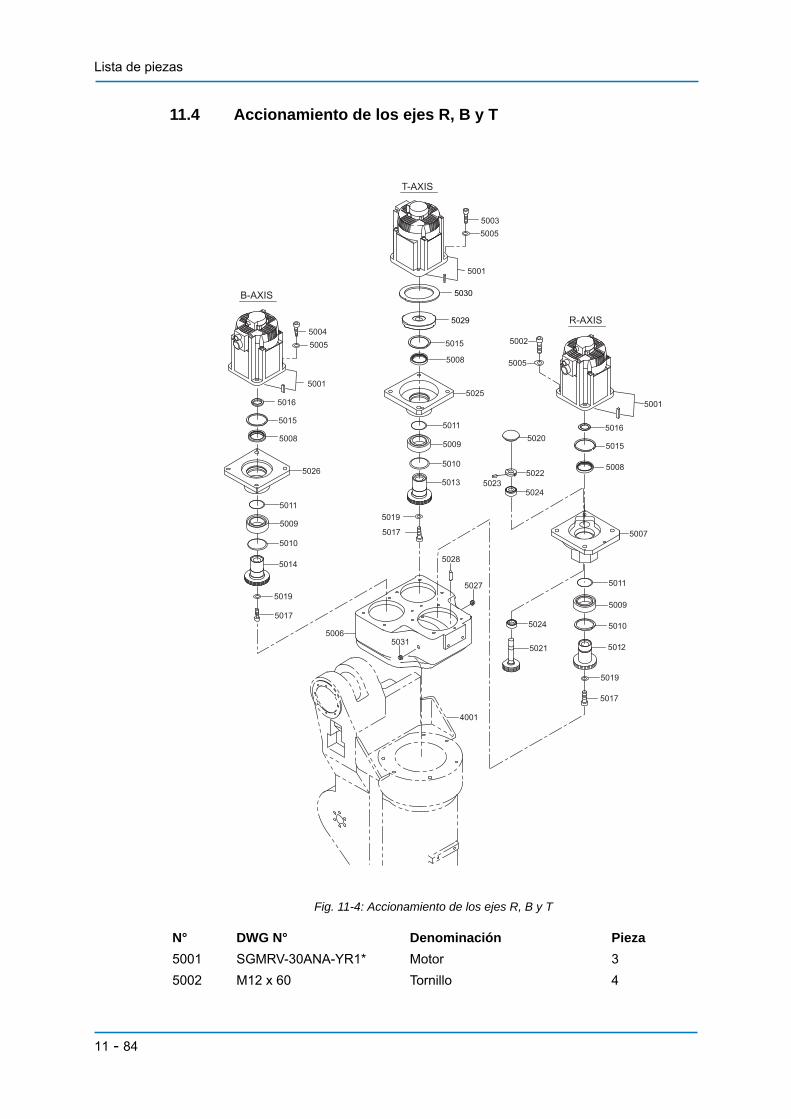
Lista de piezas
11.4 Accionamiento de los ejes R, B y T
Fig. 11-4: Accionamiento de los ejes R, B y T
N° DWG N° Denominación Pieza5001 SGMRV-30ANA-YR1* Motor 35002 M12 x 60 Tornillo 4
R-AXIS
T-AXIS
B-AXIS
5001
4001
5016
5007
50095008
5010
5009
5026
5025
5012
5013
5010
5015
5009
5017
5019
5017
50195011
5010
5014
5003
5001
5008
5001
50055004
5005
5002
5005
5011
5006
5017
5019
5027
5028
5031
5024
5011
5015
5016
5021
5024
50225023
5020
5015
5008
5029
5030
11 - 84

Lista de piezas
Tab. 11-4: Lista de piezas del accionamiento de los ejes R, B y T
5003 M12 x 70 Tornillo 45004 M12 x 55 Tornillo 45005 2H-12 Placa 125006 HW0100385-2 Carcasa 15007 HW0200006-2 Brida 15008 Y507212.5 Retén de aceite 35009 TAFI506825 Cojinete 35010 AR68 Anillo de retención Seeger 35011 WR50 Borne 35012 HW1302254-1 Piñón 15013 HW1302310-1 Piñón 15014 HW0302985-B Piñón 15015 RTW72 Anillo de retención Seeger 35016 HW0402951-1 Manguito 25017 M8 x 30 Tornillo 35019 2H-8 Placa 35020 EZ5001B0 Cubierta 15021 HW0302987-2 Piñón 15022 HW0401514-1 Tuerca 15023 M5 x 7 Tornillo 25024 HW9480086-A Cojinete 25025 HW1302308-1 Brida 15026 HW1302308-2 Brida 15027 PT1/8 Tornillo prisionero 25028 HW1405948-8-20 Clavija 15029 HW0411891-1 Disco volante 15030 HW0402627-2 Placa 15031 PT3/8 Tornillo prisionero 18026 HW0100310-2 Carcasa 1
N° DWG N° Denominación Pieza
11 - 85
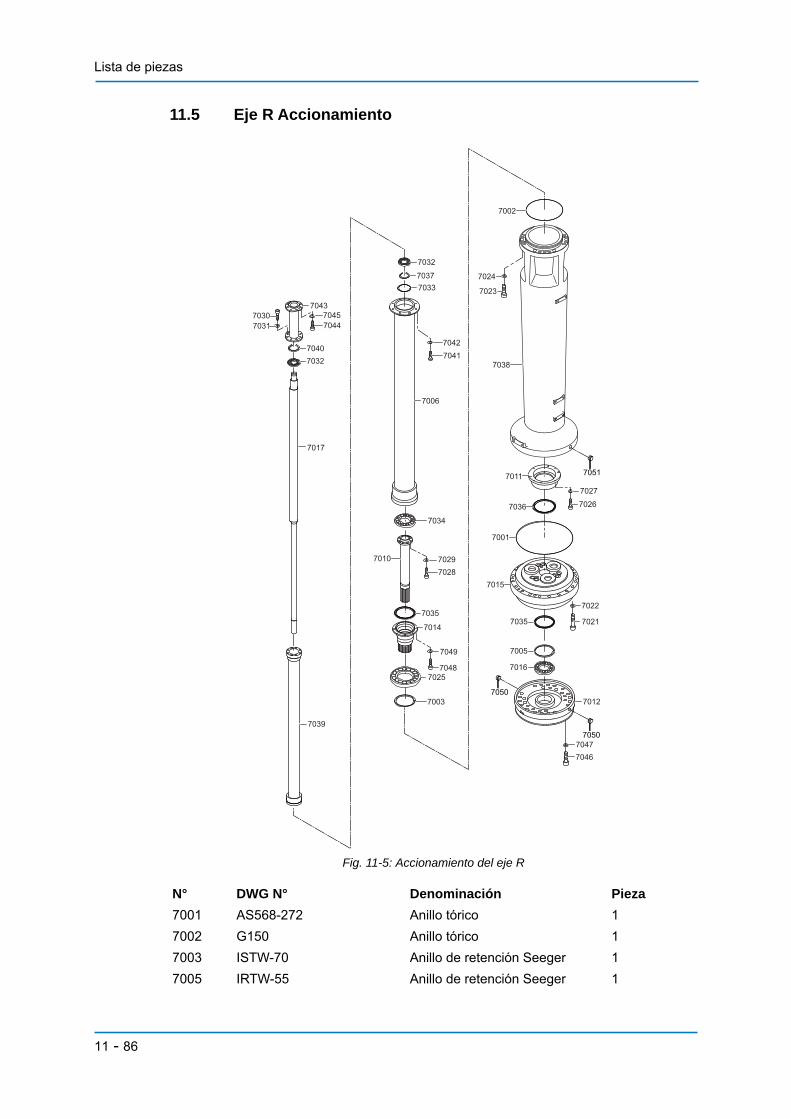
Lista de piezas
11.5 Eje R Accionamiento
Fig. 11-5: Accionamiento del eje R
N° DWG N° Denominación Pieza7001 AS568-272 Anillo tórico 17002 G150 Anillo tórico 17003 ISTW-70 Anillo de retención Seeger 17005 IRTW-55 Anillo de retención Seeger 1
7001
7002
7003
7005
7006
7010
7011
7012
7014
7015
7016
7017
7021
7022
70467047
7025
7026
7027
7048
7049
70287029
7032
7032
7033
7034
7035
7036
7035
7040
7038
7039
7037
70307031
7043
70447045
7023
7024
70417042
7050
7050
7051
11 - 86

Lista de piezas
Tab. 11-5: Lista de piezas accionamiento eje R
7006 HW0302540-C Eje 17010 HW0312724-A Eje 17011 HW0302541-1 Carcasa 17012 HW0300925-5 Distanciador 17014 HW1302256-1 Piñón 17015 HW0380393-A Engranaje 17016 6907LLU Cojinete 17017 HW0312724-A Eje 17021 M12 x 60 Tornillo 127022 2H-12 Placa 127023 M12 x 45 Tornillo 167024 2H-12 Placa 167025 6914DDU Cojinete 17026 M5 x 16 Tornillo 67027 2H-5 Placa 67028 M5 x 14 Tornillo 87029 2H-5 Placa 87030 M5 x 14 Tornillo 87031 2H-5 Placa 87032 6905DDU Cojinete 27033 IRTW42 Anillo de retención Seeger 17034 6813DDU Cojinete 17035 AE2085K4 Retén de aceite 17036 SC65X88X12-FKM Retén de aceite 17037 STW-25 Anillo de retención Seeger 17038 HW0101266-2 Brazo U 17039 HW0312763-1 Eje 17040 STW-25 Anillo de retención Seeger 17041 M5 x 14 Tornillo 87042 2H-5 Placa 87043 HW0302544-1 Eje 17044 M5 x 14 Tornillo 87045 2H-5 Placa 87046 M12 x 45 Tornillo 167047 2H-12 Placa 167048 M5 x 14 Tornillo 87049 2H-5 Placa 87050 PT1/8 Tornillo prisionero 27051 PT3/8 Tornillo prisionero 1
N° DWG N° Denominación Pieza
11 - 87
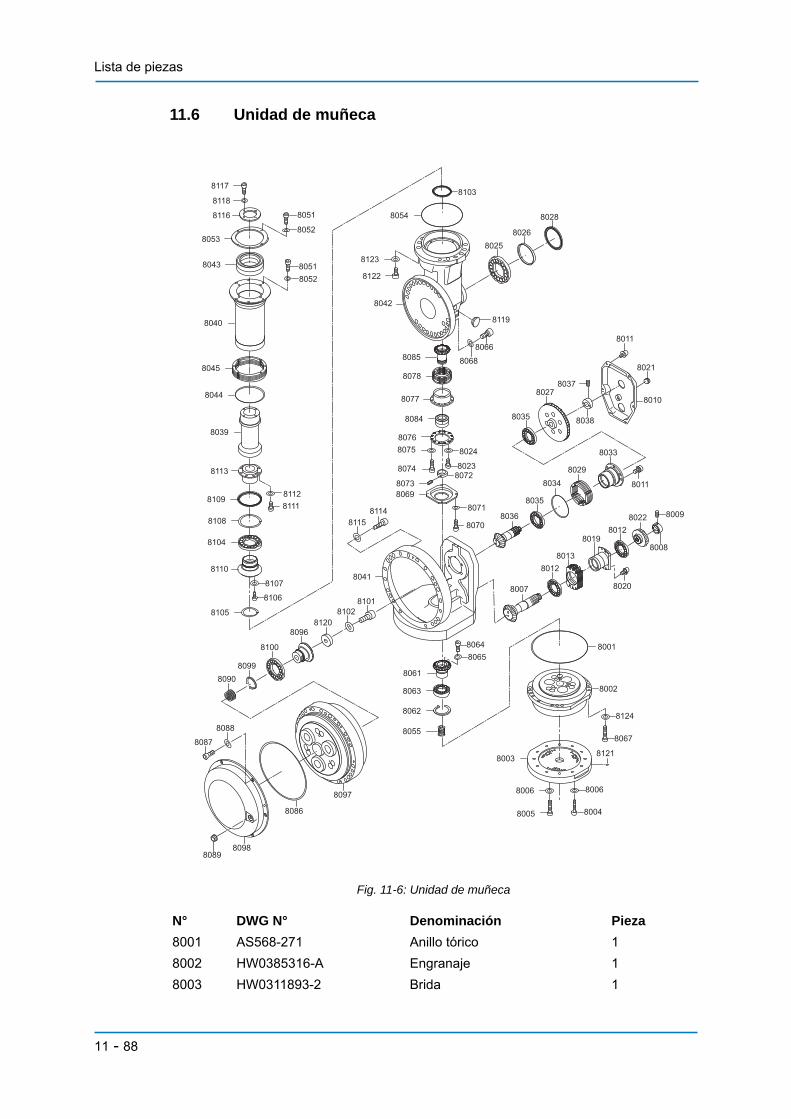
Lista de piezas
11.6 Unidad de muñeca
Fig. 11-6: Unidad de muñeca
N° DWG N° Denominación Pieza8001 AS568-271 Anillo tórico 18002 HW0385316-A Engranaje 18003 HW0311893-2 Brida 1
8001
8002
8007
8008
8009
8010
8011
8011
8012
8012
8013
8019
8021
8022
8074
8075
8025
8035
8026
8027
8028
8029
8033
8034
8035
8036
8037
80388039
8113
8119
81128111 8114
8115
8040
8041
8042
8122
81238043
8044
8045
80518052
8053
8051
8052
8061
8062
8063
8055
80648065
8066
8068
8069
8070
8071
80728073
8023
8024
8076
8077
8078
8084
8085
8086
8087
8088
8089
8090
8096
8097
8098
8099
8100
81018102
8103
8104
8110
8105
8106
8107
8108
8109
8120
8054
8020
8117
8118
8116
8067
8124
8004
8006
8005
8006
81218003
11 - 88

Lista de piezas
8004 M8 x 30 Tornillo 248005 M8 x 20 Tornillo 98006 2H-8 Placa 338007 HW0311891-1 Piñón 18008 HW0401514-1 Tuerca 18009 M5 x 7 Tornillo 28010 HW0200329-1 Cubierta 18011 M6 x 15 Tornillo 118012 HR32004XJ Cojinete 28013 HW0403390-* Arandela de ajuste *8019 HW0402965-1 Carcasa 18020 M5 x 16 Tornillo 68021 PT1/8 Tornillo prisionero 18022 HW0302600-1 Piñón 18023 M3 x 16 Tornillo 88024 2H-3 Placa 88025 6911 Cojinete 18026 RTW80 Anillo de retención Seeger 18027 HW0302599-1 Piñón 18028 AE3290E3 Retén de aceite 18029 HW9403622-* Arandela de ajuste *8033 HW0402964-1 Carcasa 18034 S60 Anillo tórico 18035 HR32005XJ Cojinete 28036 HW0302598-1 Piñón 18037 M5 x 7 Tornillo 28038 HW0402963-1 Tuerca 18039 HW0302582-2 Eje 18040 HW0302546-1 Carcasa 18041 HW0102060-1 Muñeca 18042 HW0100312-1 Carcasa 18043 HW0481446-A Cojinete 18044 G95 Anillo tórico 18045 HW0402955-1~6 Arandela de ajuste *8051 M4 x 12 Tornillo 88052 2H-4 Placa 88053 HW0402954-1 Soporte 18054 G140 Anillo tórico 18055 HW0411862-* Arandela de ajuste *8061 HW0311892-1 Piñón 18062 STW-40 Anillo de retención Seeger 1
N° DWG N° Denominación Pieza
11 - 89
Lista de piezas
8063 6008 Cojinete 18064 M6 x 30 Tornillo 48065 2H-6 Placa 48066 M12 x 25 Tornillo 258067 M12 x 45 Tornillo 98068 2H-12 Placa 258069 HW0402962-1 Cubierta 18070 M4 x 12 Tornillo 48071 2H-4 Placa 48072 HW0402960-1 Tuerca 18073 M5 x 7 Tornillo 28074 M3 x 8 Tornillo 48075 2H-3 Placa 48076 HW0402959-1 Soporte 18077 HW0402958-1 Carcasa 18078 HW0402961-* Arandela de ajuste *8084 HW0481447-A Cojinete 18085 HW0302597-1 Piñón 18086 AS568-272 Anillo tórico 18087 M6 x 12 Tornillo 68088 2H-6 Placa 68089 PT1/8 Tornillo prisionero 18090 HW0402968-* Arandela de ajuste *8096 HW0302594-1 Piñón 18097 HW0381033-B Engranaje 18098 HW0302457-1 Cubierta 18099 STW-45 Anillo de retención Seeger 18100 6009 Cojinete 18101 M10 x 35 Tornillo 18102 2H-10 Placa 18103 AC1030F0 Retén de aceite 18104 6911 Cojinete 18105 RTW40 Anillo de retención Seeger 18106 M4 x 12 Tornillo 128107 2H-4 Placa 128108 ISTW-55 Anillo de retención Seeger 18109 AC2847-F3-FKM Retén de aceite 18110 HW0312726-1 Piñón 18111 M5 x 16 Tornillo 88112 2H-5 Placa 88113 HW0412598-1 Eje 1
N° DWG N° Denominación Pieza
11 - 90
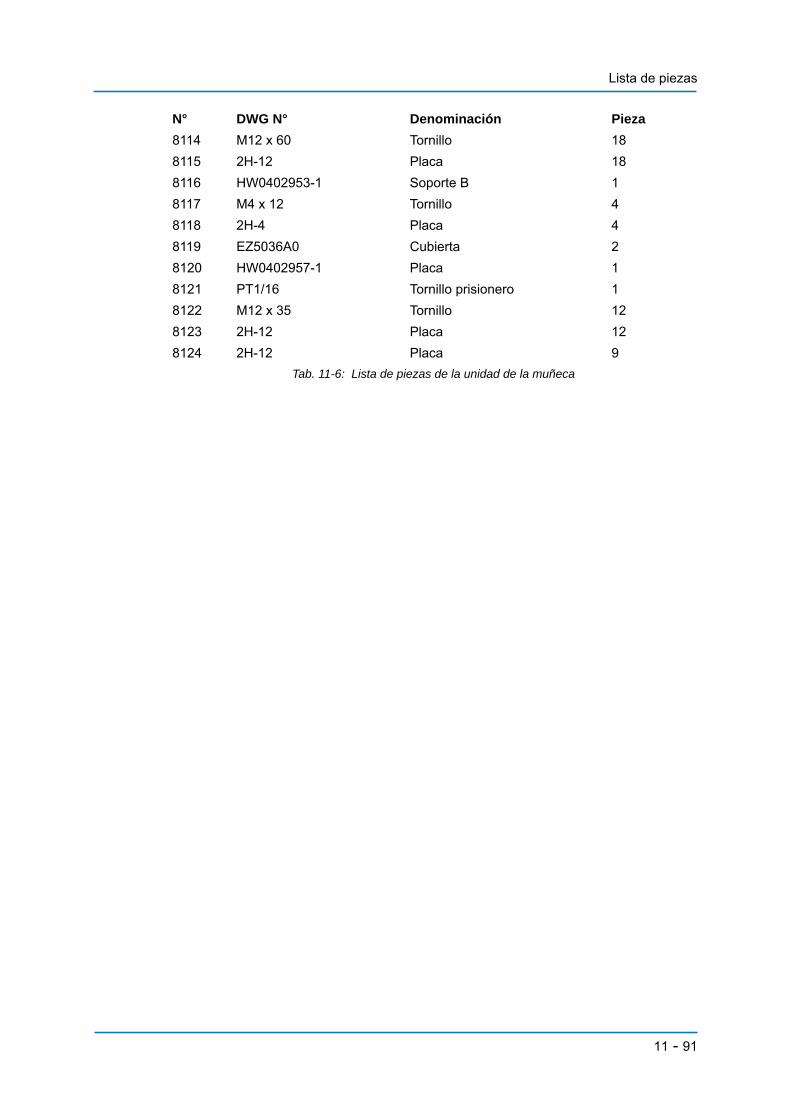
Lista de piezas
Tab. 11-6: Lista de piezas de la unidad de la muñeca
8114 M12 x 60 Tornillo 188115 2H-12 Placa 188116 HW0402953-1 Soporte B 18117 M4 x 12 Tornillo 48118 2H-4 Placa 48119 EZ5036A0 Cubierta 28120 HW0402957-1 Placa 18121 PT1/16 Tornillo prisionero 18122 M12 x 35 Tornillo 128123 2H-12 Placa 128124 2H-12 Placa 9
N° DWG N° Denominación Pieza
11 - 91

Lista de piezas
11.7 Cilindro de compensación
Fig. 11-7: Cilindro de compensación
N° DWG N° Denominación Pieza3001 HW9302054-1 Eje 13002 M12 x 50 Tornillo 123003 2H-12 Placa 123004 HW9405057-1 Manguito 13005 NA6912 Cojinete 13006 AR85 Borne 13007 VB75956 Retén de aceite 13008 VB60787 Retén de aceite 13009 WR60 Borne 13010 PT1/8 Tornillo prisionero 73011 FD3187A0 Junta de estanqueidad 1
1002
2041
3001
30033002
30043005
3006
3007
3008
30093010
3012
3011
3015
3014
3016
3013
3013
3012
3017
3018
3018
3019
3020
3021
3022
3023
30243025
3026
3028
3027
3029
3025
30263028
30273029
3032
3033
3034
30353010
30373036
3010
3010
3034
30353037
30363010
3037
11 - 92

Lista de piezas
Tab. 11-7: Cilindro de compensación
3012 IRTW-75 Anillo de retención Seeger 23013 SOB-607440 Manguito 23014 HW0200420-1 Brida 13015 M10 x 40 Tornillo 83016 2H-10 Placa 83017 HW0303581-1 Eje 13018 M6 x 8 Tornillo 23019 HW0481741-A Resorte 13020 HW0481740-A Resorte 13021 HW0306033-1 Brida 13022 HW0401112-1 Brida 13023 M5 x 10 Tornillo 23024 HW0100477-1 Carcasa 13025 KE901107 Retén de aceite 23026 HW9405055-1 Eje 23027 M10 x 50 Tornillo 183028 2H-10 Placa 183029 HR32916J Rodillo cónico 23030 M10 x 50 Tornillo 93031 2H-10 Placa 93032 EZ2228B0 Cubierta 13033 M8 x 16 Tornillo 33034 S105 Anillo tórico 23035 HW9405699-5 Cubierta 23036 M8 x 20 Tornillo 83037 2H-8 Placa 111002 HW1100345-2 Carcasa 12041 HW1100346-1 Brazo L 1
N° DWG N° Denominación Pieza
11 - 93

Lista de piezas
11.8 Unidad articulación
Fig. 11-8: Unidad articulación
N° DWG N° Denominación Pieza4001 HW0100310-2 Carcasa 14002 VC951159 Retén de aceite 2
2041
4001
4002
4003
40054004
4006
4008
4007
40104009
2051
4011
4011
4011
4011
4002
4003
40044005
4006
4012
40104009
4008
4007
4013
4014
4015
4016
40174018
4011
4020
4019
4011
40144021
4016
4022
40244023
4025
40174026
40284027
4011
4029
4030
4031
40324033
4011
40354034
4011
4029
4036
4031
4037
40394038
4040
4032
4033
4011
40354034
11 - 94

Lista de piezas
Tab. 11-8: Unidad articulación
4003 HW0402976-1 Eje 24004 M10 x 75 Tornillo 124005 2H-10 Placa 124006 HR33017U Cojinete 24007 G125 Anillo tórico 24008 HW0402975-1 Soporte 24009 M10 x 30 Tornillo 84010 2H-10 Placa 84011 PT1/8 Tornillo 124012 HW0401977-* Arandela de ajuste *4013 HW1302253-1 Articulación 14014 VC70957 Retén de aceite 24015 HW0402982-2 Eje 14016 HR33111J Cojinete 24017 G90 Anillo tórico 24018 HW0402979-3 Soporte 14019 M8 x 20 Tornillo 84020 2H-8 Placa 84021 HW0402981-1 Manguito 14022 HW0402980-2 Placa 14023 M8 x 25 Tornillo 34024 2H-8 Placa 34025 HW1402912-* Arandela de ajuste *4026 HW0402978-3 Soporte 14027 M8 x 25 Tornillo 44028 2H-8 Placa 44029 VC70957 Retén de aceite 24030 HW0402982-2 Eje 14031 HR33111J Cojinete 24032 G90 Anillo tórico 24033 HW0402978-3 Soporte 24034 M8 x 25 Tornillo 84035 2H-8 Placa 84036 HW0402981-1 Manguito 14037 HW0402980-2 Placa 14038 M8 x 25 Tornillo 34039 2H-8 Placa 34040 HW1402912-* Arandela de ajuste *2041 HW1100346-1 Brazo L 12051 HW11000347-1 Articulación 1
N° DWG N° Denominación Pieza
11 - 95

YASKAW
A Headquarter







![Visual Basic: Programación de robots LEGOES].pdf · Un robot que sigue una línea.....75 8.2.1. Propuesta de proyecto ...](https://static.fdocuments.us/doc/165x107/5b3688c77f8b9abc218eb07b/visual-basic-programacion-de-robots-espdf-un-robot-que-sigue-una-linea75.jpg)









