
Robotics - McGill Universitycim.mcgill.ca/~hamid/Robotics/MECH 573.pdf · zRobotics: a human dream...
50
Advance Robotic & Automated Systems (ARAS) Department of Electrical Engineering – K.N.Toosi U. of Tech. Robotics: Robotics: Evolution, Technology and Applications Evolution, Technology and Applications By: Prof. Hamid D. Taghirad Visiting Professor Center for Intelligent Machines McGill University
Transcript of Robotics - McGill Universitycim.mcgill.ca/~hamid/Robotics/MECH 573.pdf · zRobotics: a human dream...

Advance Robotic & Automated Systems (ARAS)Department of Electrical Engineering – K.N.Toosi U. of Tech.
Robotics:Robotics:Evolution, Technology and ApplicationsEvolution, Technology and Applications
By: Prof. Hamid D. Taghirad
Visiting ProfessorCenter for Intelligent MachinesMcGill University

1/3/20061/3/2006 22MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
OutlineOutline• Introduction
Robotics: a human dreamRobotic evolutionRobot definition
• Robot ClassificationKinematicsArm configuration
End effector
• Robotic ApplicationSpaceIndustrialMedicalParallel Manipulators
• MECH 573 ContentsCourse contentsTextbooksMarking Scheme

1/3/20061/3/2006 33MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
IntroductionIntroduction
• Human Dream: Build a human clownHuman Arm Robot manipulatorHuman Leg Mobile robot
Legged robotHuman Eye Machine visionHand-eye task Visual servoingListen and talk Sound recognitionThink and decide Artificial intelligence…

1/3/20061/3/2006 44MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
IntroductionIntroduction
• Dream coming to true starting withRobots as workers: ManipulatorsManipulator Worker arm
• Robot Definition:A motorized computer-controlled machine that
can be programmed to do a variety of tasks especially repeatable and tiresome ones.
1/3/20061/3/2006 55MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
IntroductionIntroduction
• Robot Evolution1921: Robota introduced in Karel Capek theatre, as a slave performing compulsory tasks1962: 1st Generation Robot, Unimation Inc. pneumatically driven1975-1997: 2nd Generation Robot, programmable robots in a well known environment (servo-controlled, PLC)1990- current: 3rd Generation Robot, Intelligent robot in an unstructured environment (Artificial intelligent)
1/3/20061/3/2006 66MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
IntroductionIntroduction
• Why Robots
StrongTirelessAccurate and repeatableWell-immune
Labor saving, improvement of working condition, increasing Labor saving, improvement of working condition, increasing flexibility, productivity, quality, etcflexibility, productivity, quality, etc
1/3/20061/3/2006 77MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
IntroductionIntroduction
• Manipulator componentsArm Links and jointsHand End effectorActuators and driveSensors and transducersComputer and ElectronicsEducation via software

1/3/20061/3/2006 88MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
IntroductionIntroduction• Robot Subsystems
1/3/20061/3/2006 99MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robot ClassificationRobot Classification
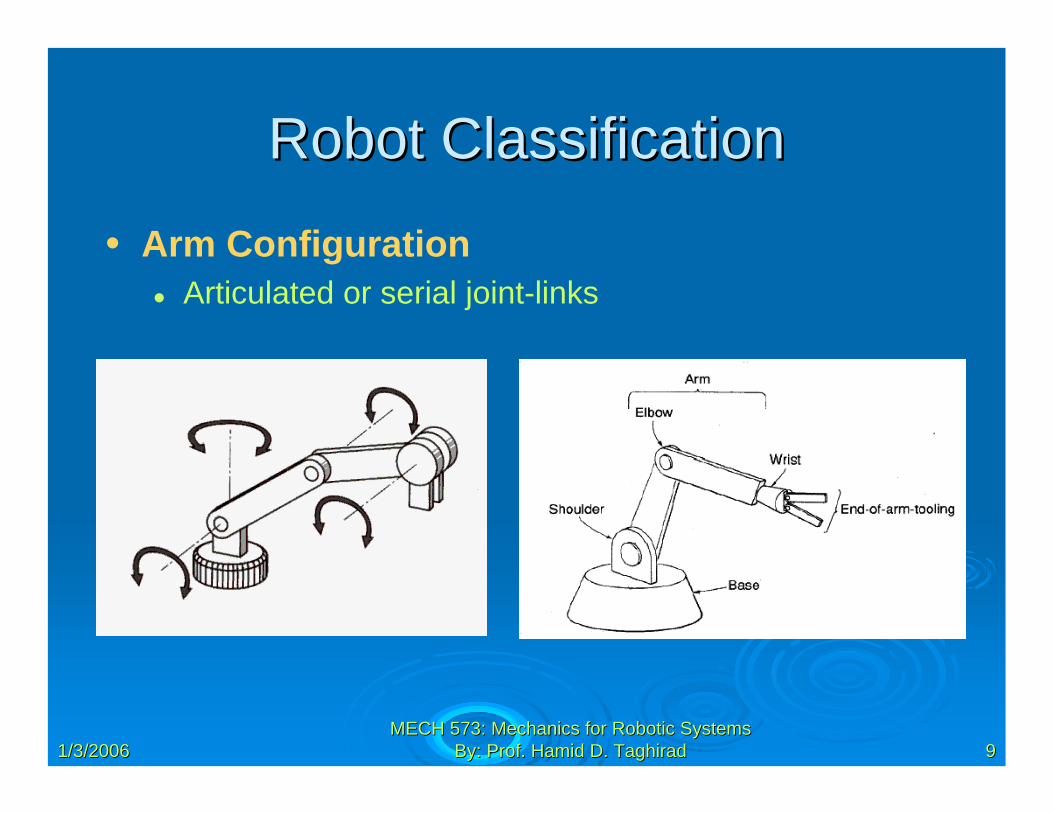
• Arm ConfigurationArticulated or serial joint-links

1/3/20061/3/2006 1010MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robot ClassificationRobot Classification• Articulated

1/3/20061/3/2006 1111MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
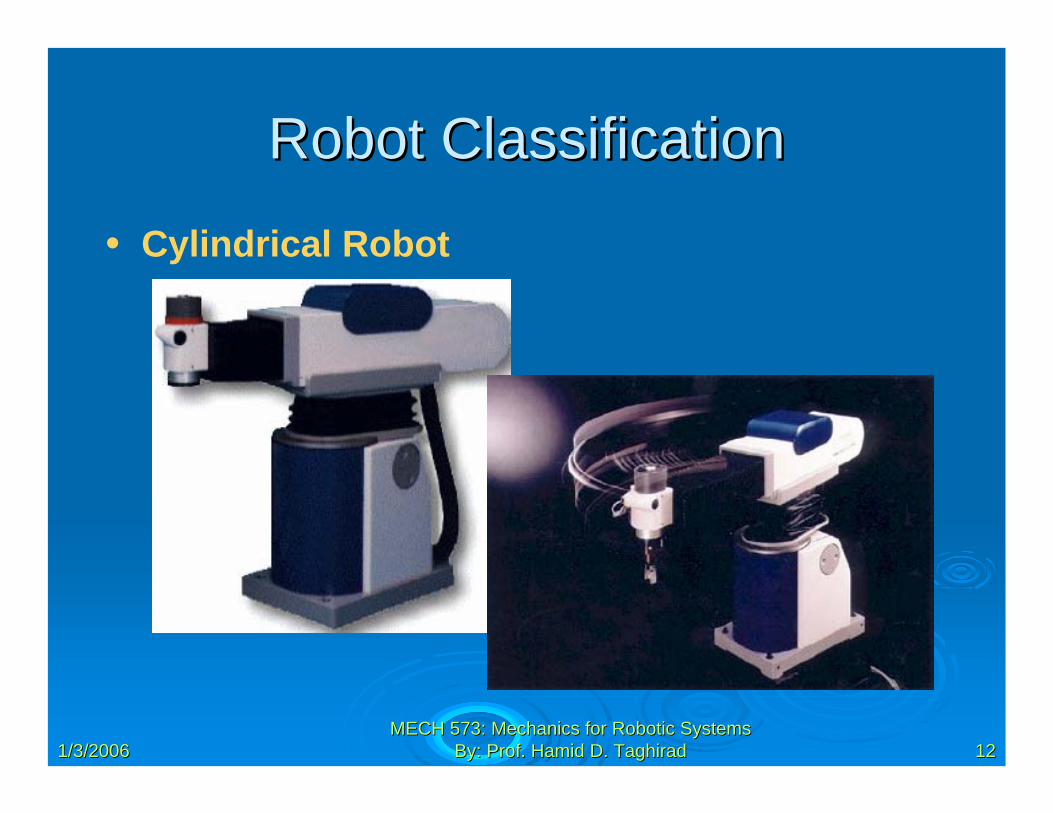
Robot ClassificationRobot Classification
• Arm ConfigurationCylindrical Robot
1/3/20061/3/2006 1212MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robot ClassificationRobot Classification
• Cylindrical Robot
1/3/20061/3/2006 1313MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
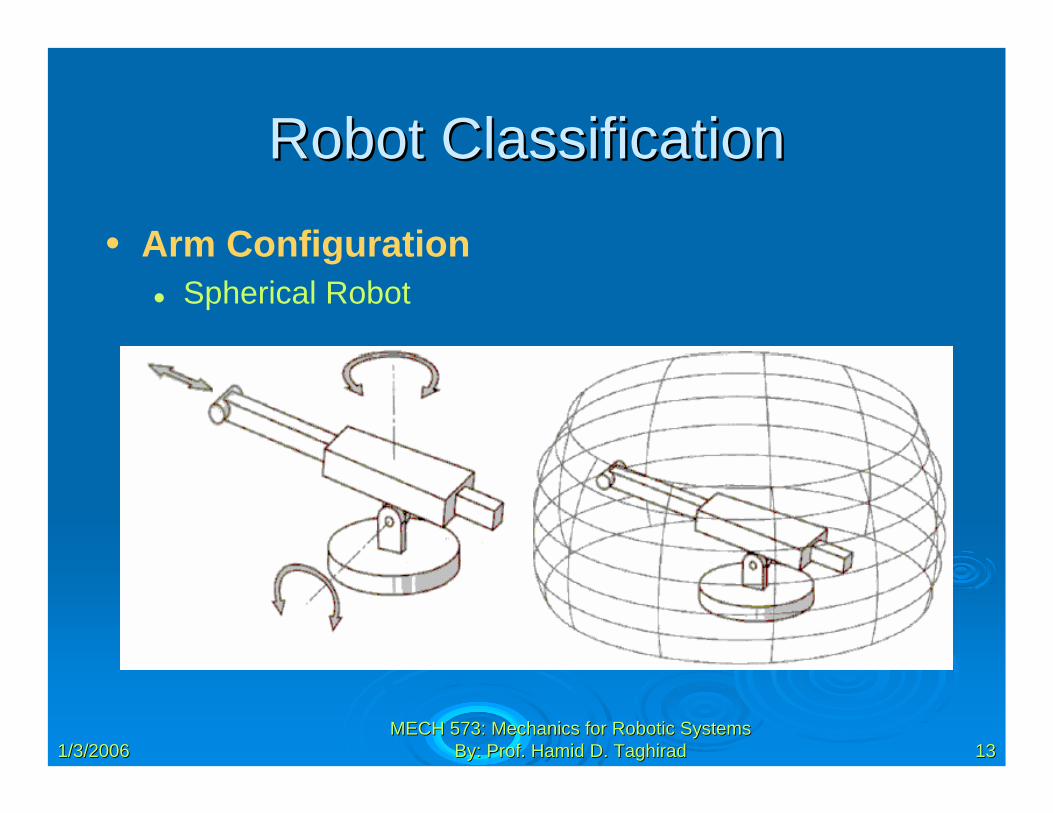
Robot ClassificationRobot Classification
• Arm ConfigurationSpherical Robot
1/3/20061/3/2006 1414MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
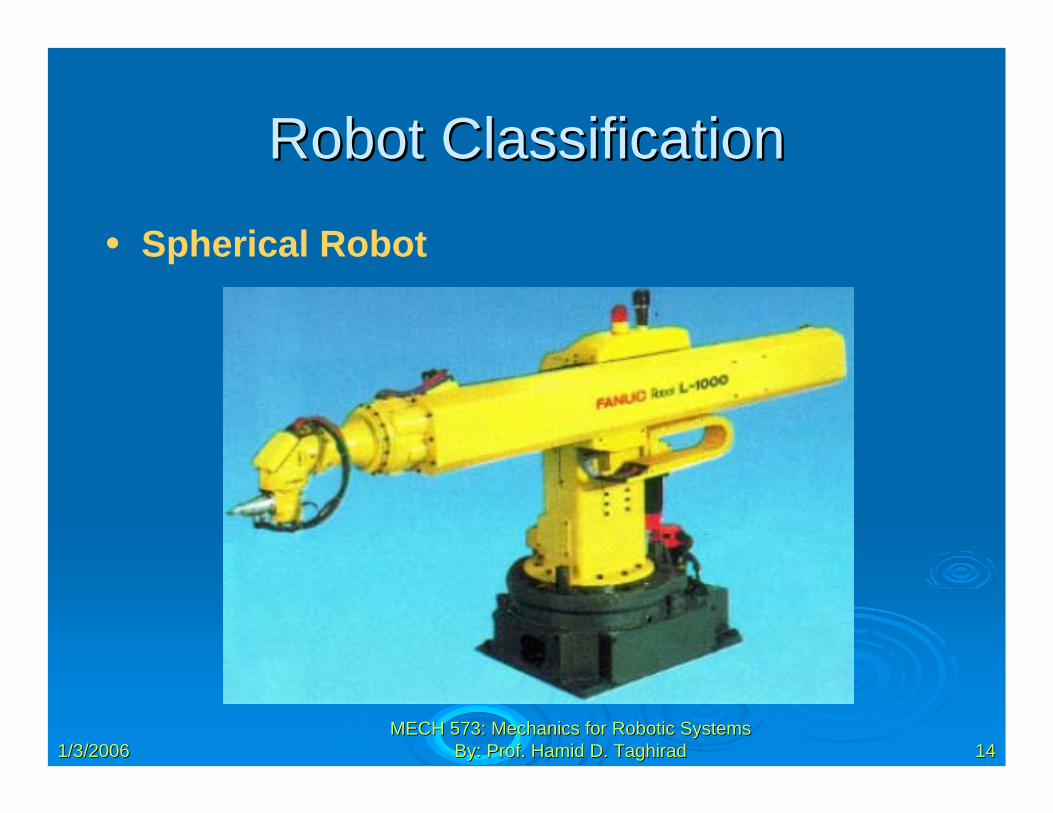
Robot ClassificationRobot Classification
• Spherical Robot

1/3/20061/3/2006 1515MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robot ClassificationRobot Classification• Arm Configuration
Cartesian Robot

1/3/20061/3/2006 1616MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robot ClassificationRobot Classification• Cartesian Robot

1/3/20061/3/2006 1717MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
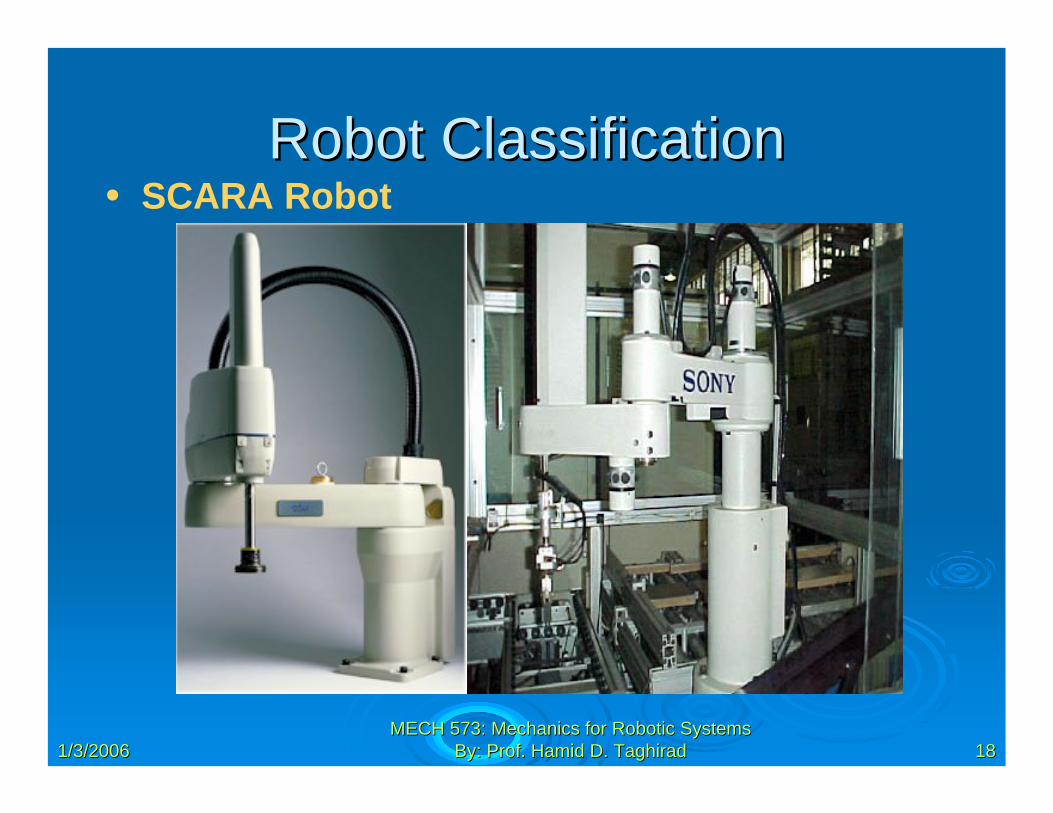
Robot ClassificationRobot Classification• Arm Configuration
SCARA Robot
1/3/20061/3/2006 1818MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robot ClassificationRobot Classification• SCARA Robot

1/3/20061/3/2006 1919MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
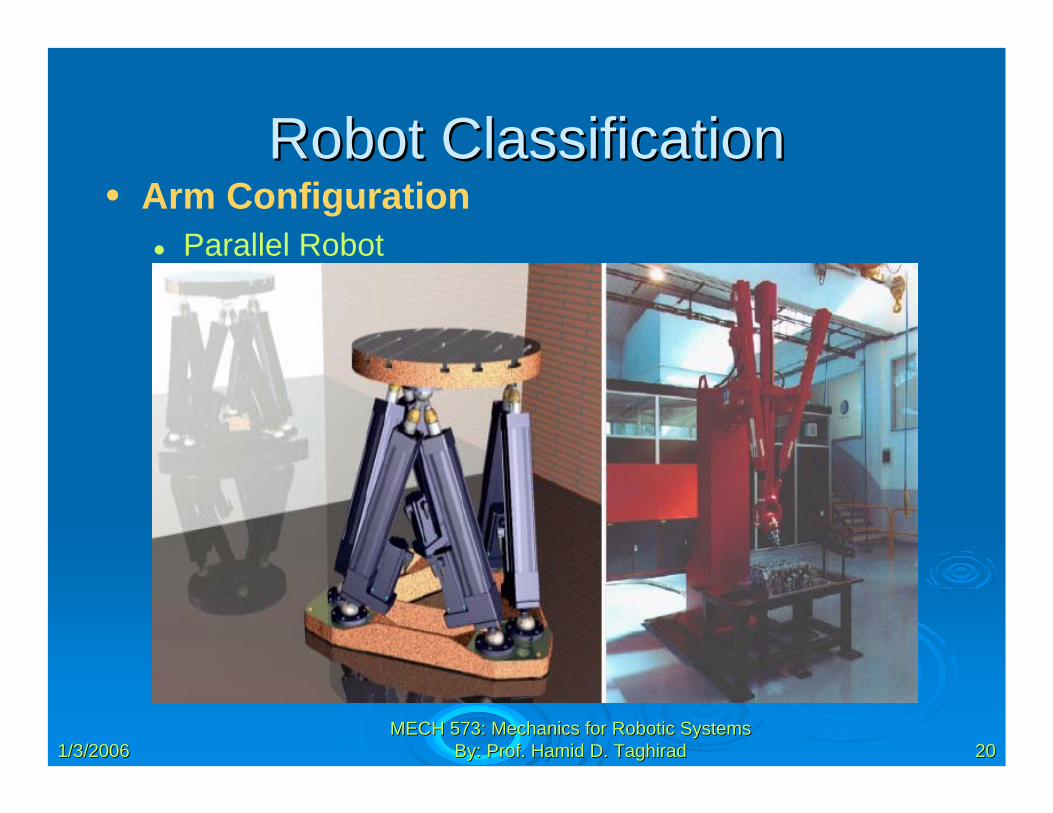
Robot ClassificationRobot Classification• Arm Configuration
Parallel Robot
1/3/20061/3/2006 2020MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robot ClassificationRobot Classification• Arm Configuration
Parallel Robot
1/3/20061/3/2006 2121MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robot ClassificationRobot Classification• Arm Configuration
Parallel Robot
1/3/20061/3/2006 2222MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
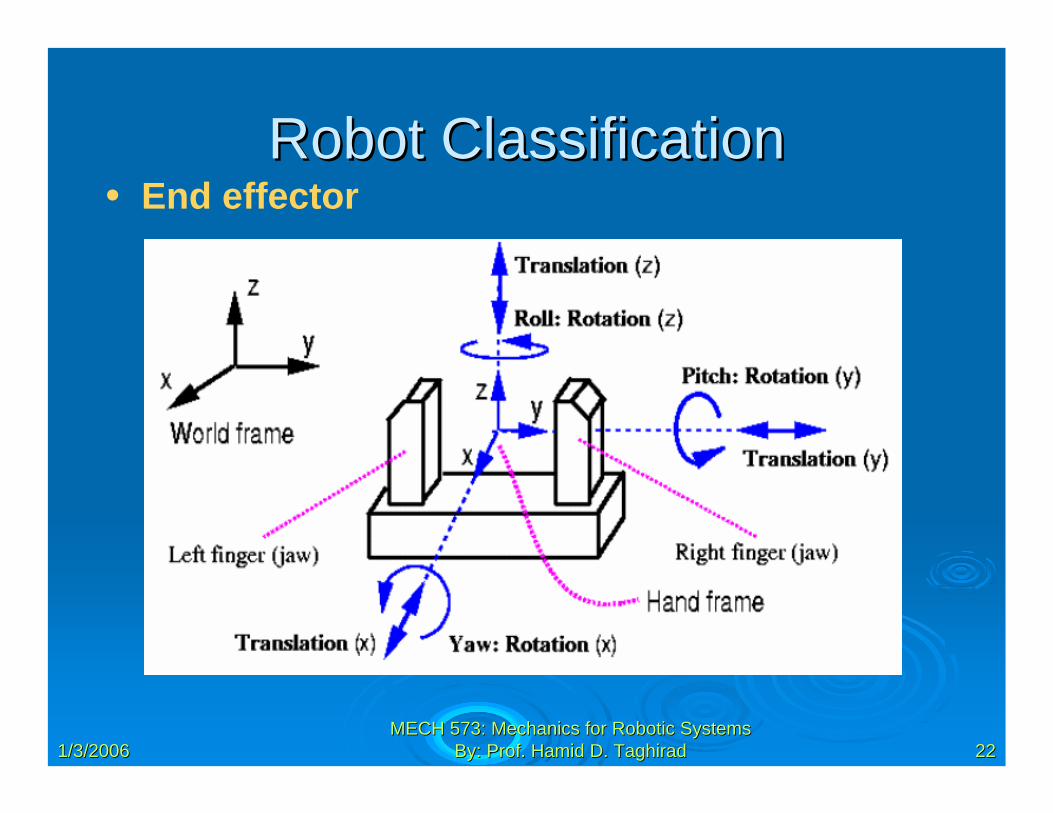
Robot ClassificationRobot Classification• End effector
1/3/20061/3/2006 2323MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
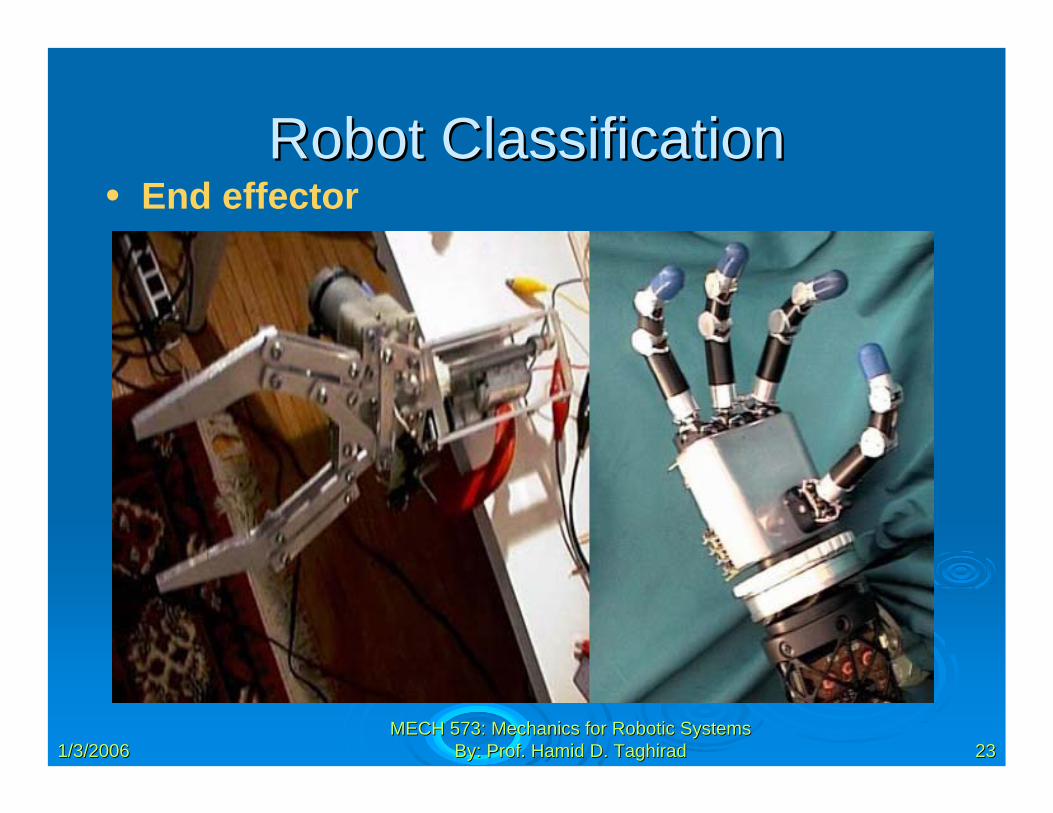
Robot ClassificationRobot Classification• End effector

1/3/20061/3/2006 2424MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robot ClassificationRobot Classification• End effector

1/3/20061/3/2006 2525MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robotic ApplicationsRobotic Applications• Space Robotics:
International Space Station

1/3/20061/3/2006 2626MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robotic ApplicationsRobotic Applications• Space Robotics:
International Space Station

1/3/20061/3/2006 2727MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robotic ApplicationsRobotic Applications• Space Robotics:
Space Station Remote Manipulator System (SSRMS)
1/3/20061/3/2006 2828MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
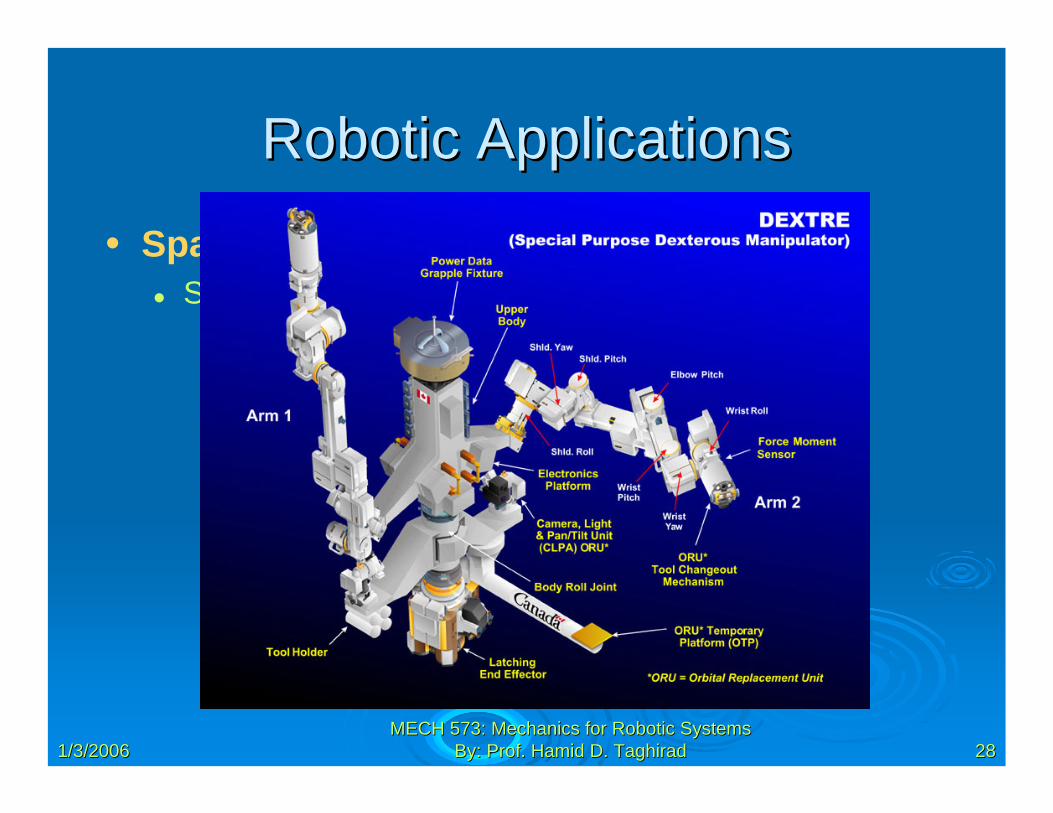
Robotic ApplicationsRobotic Applications
• Space Robotics:Special Purpose Dexterous Manipulator (SPDM)
1/3/20061/3/2006 2929MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
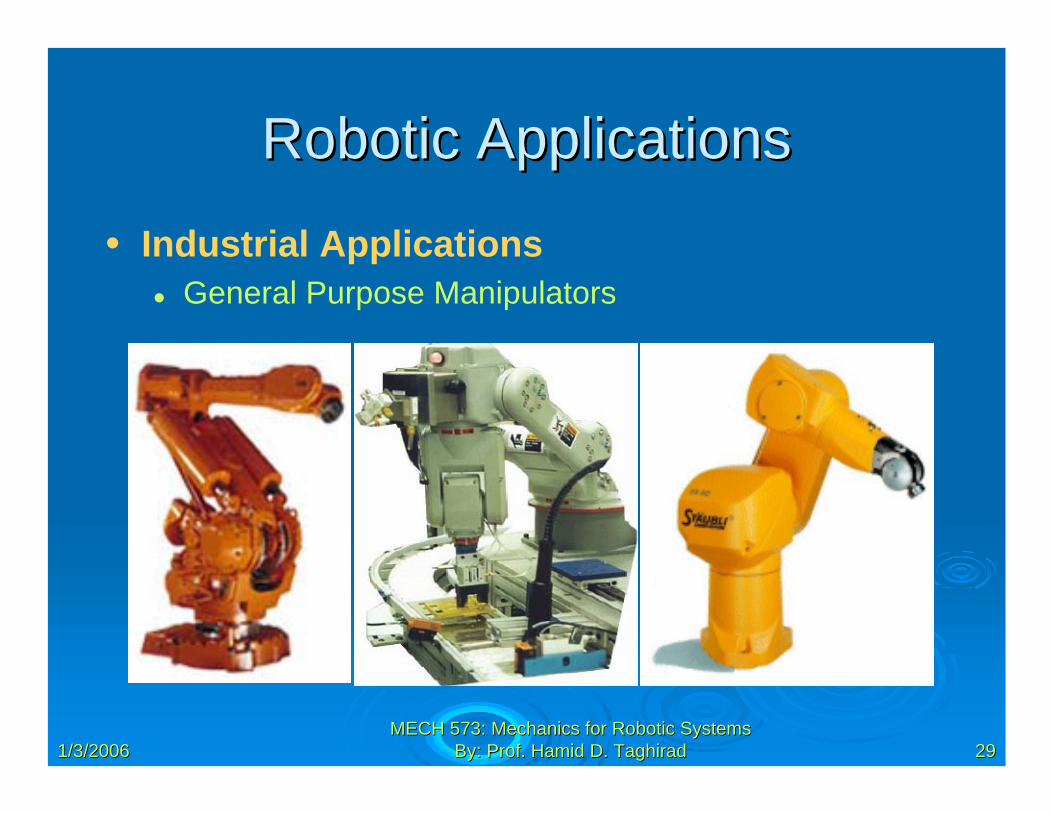
Robotic ApplicationsRobotic Applications
• Industrial ApplicationsGeneral Purpose Manipulators
1/3/20061/3/2006 3030MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
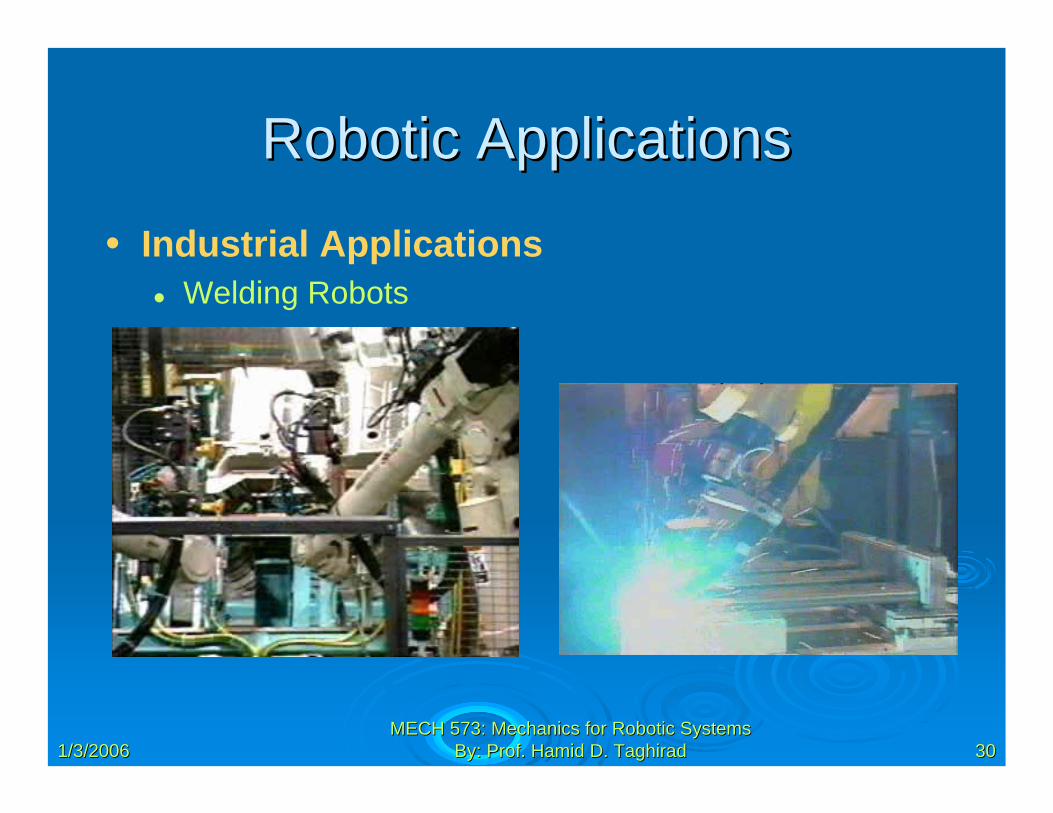
Robotic ApplicationsRobotic Applications
• Industrial ApplicationsWelding Robots
1/3/20061/3/2006 3131MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
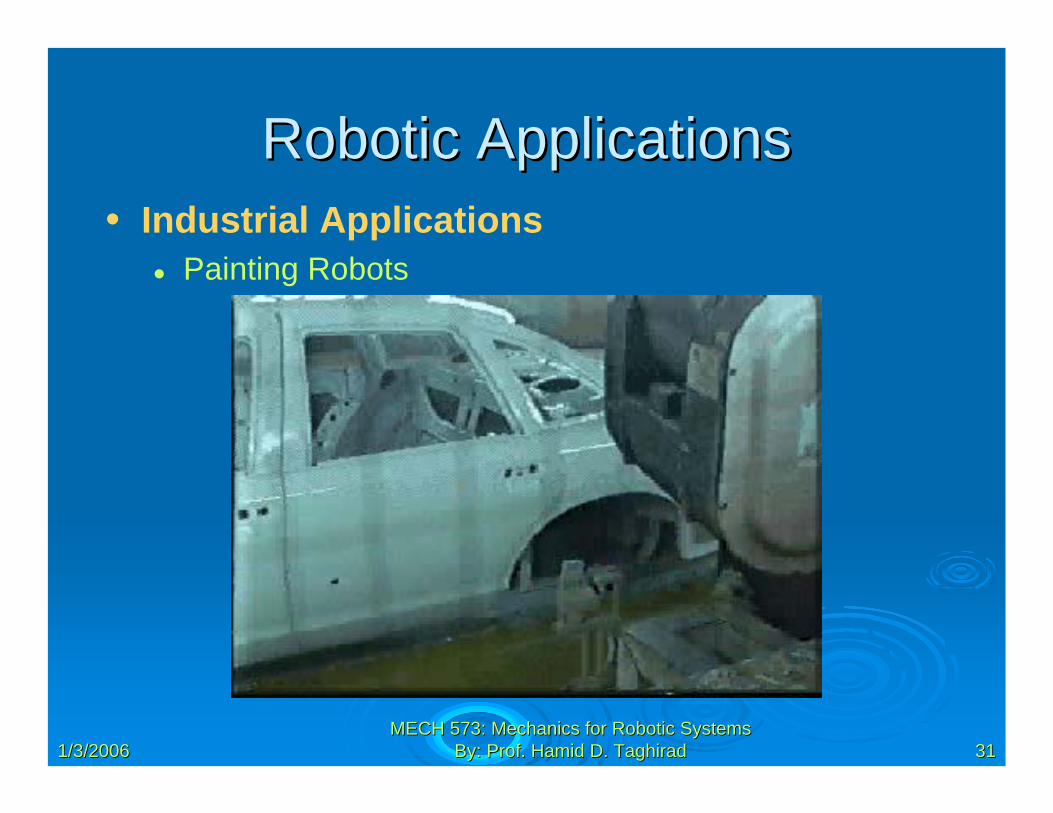
Robotic ApplicationsRobotic Applications• Industrial Applications
Painting Robots
1/3/20061/3/2006 3232MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
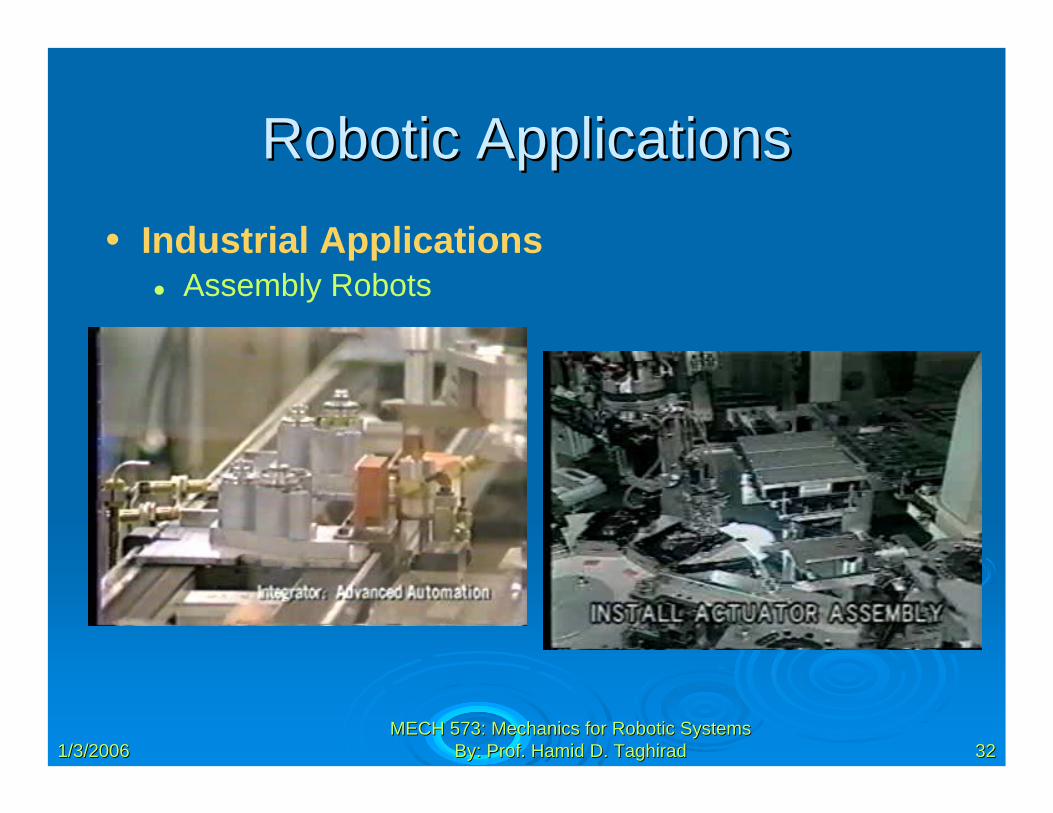
Robotic ApplicationsRobotic Applications• Industrial Applications
Assembly Robots
1/3/20061/3/2006 3333MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
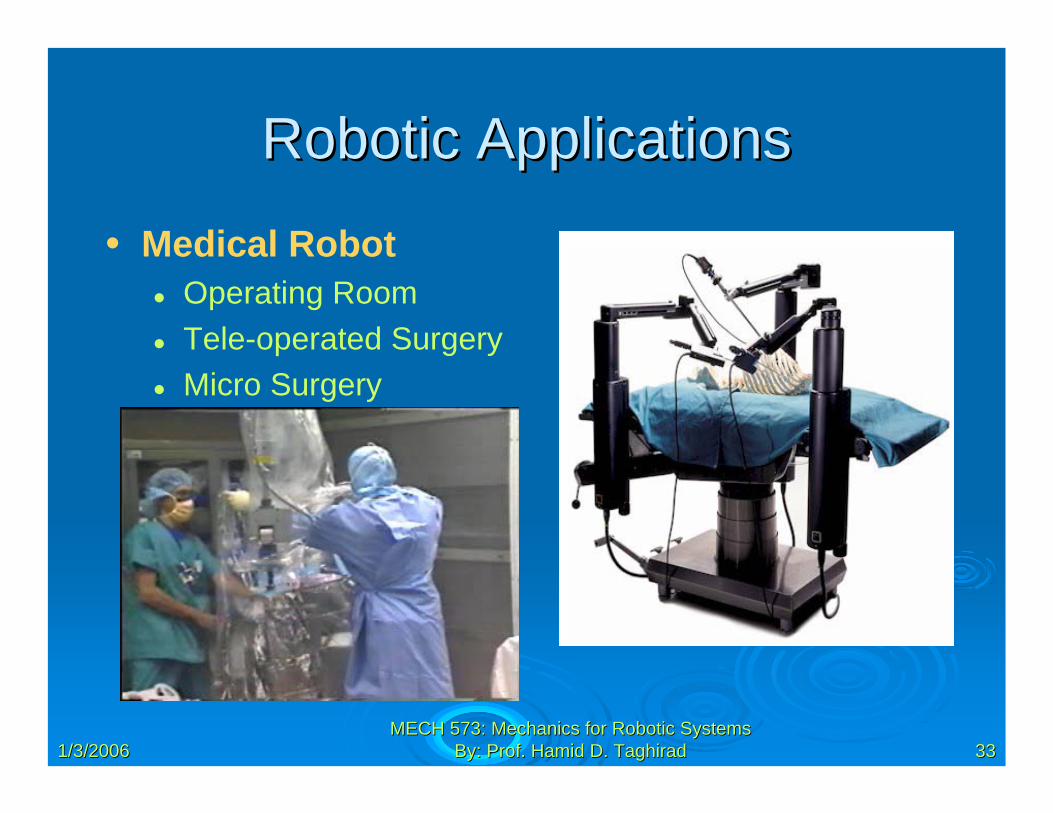
Robotic ApplicationsRobotic Applications
• Medical RobotOperating RoomTele-operated SurgeryMicro Surgery
1/3/20061/3/2006 3434MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
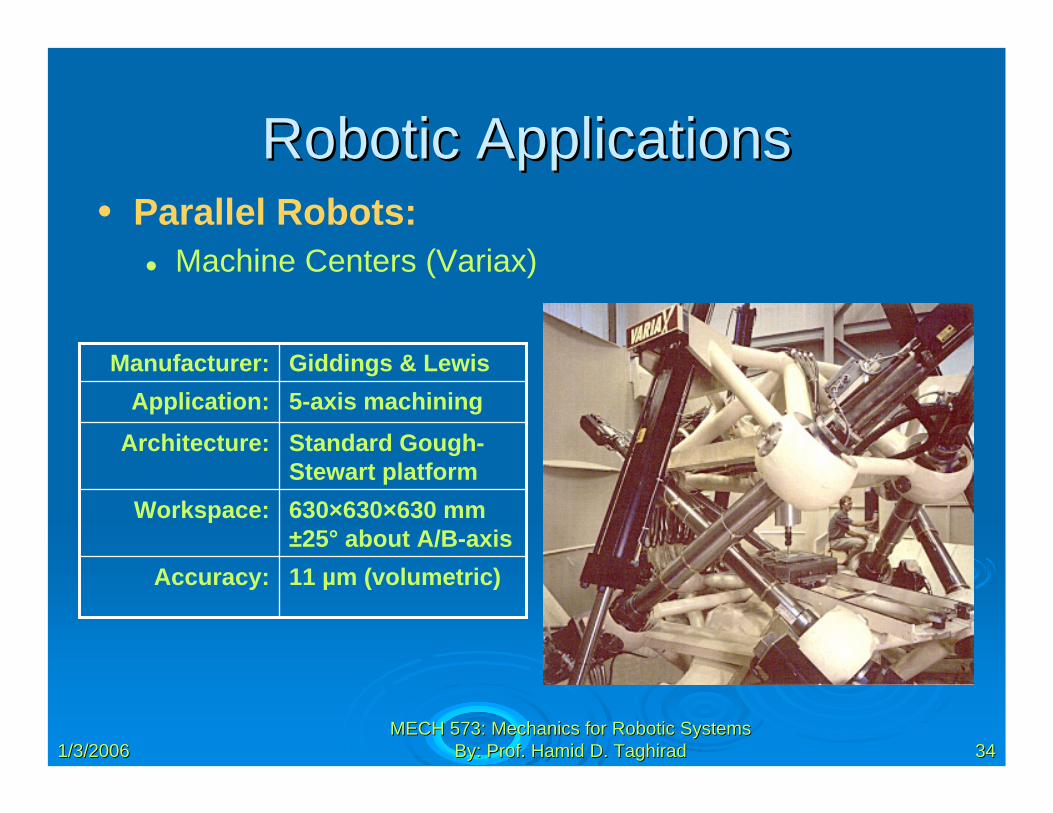
Robotic ApplicationsRobotic Applications• Parallel Robots:
Machine Centers (Variax)
11 µm (volumetric) Accuracy:
630×630×630 mm±25° about A/B-axis
Workspace:
Standard Gough-Stewart platform
Architecture:
5-axis machiningApplication:Giddings & LewisManufacturer:

1/3/20061/3/2006 3535MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robotic ApplicationsRobotic Applications• Parallel Robots:
Milling Machines (Metrom)
15 µm (volumetric) Accuracy:
800×800×500 mm±25° about A axis
Workspace:
a pentapod with variable-length struts
Architecture:
5-side machining Application:METROM Manufacturer:
1/3/20061/3/2006 3636MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
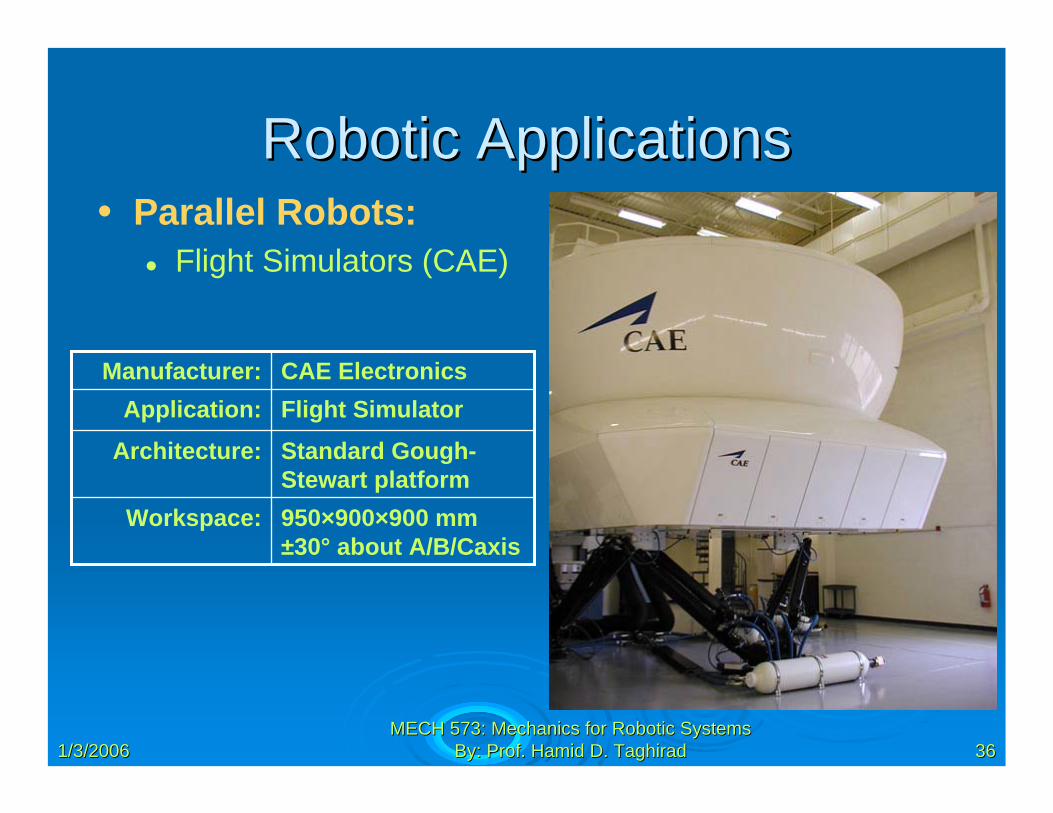
Robotic ApplicationsRobotic Applications• Parallel Robots:
Flight Simulators (CAE)
950×900×900 mm±30° about A/B/Caxis
Workspace:
Standard Gough-Stewart platform
Architecture:
Flight SimulatorApplication:CAE ElectronicsManufacturer:
1/3/20061/3/2006 3737MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
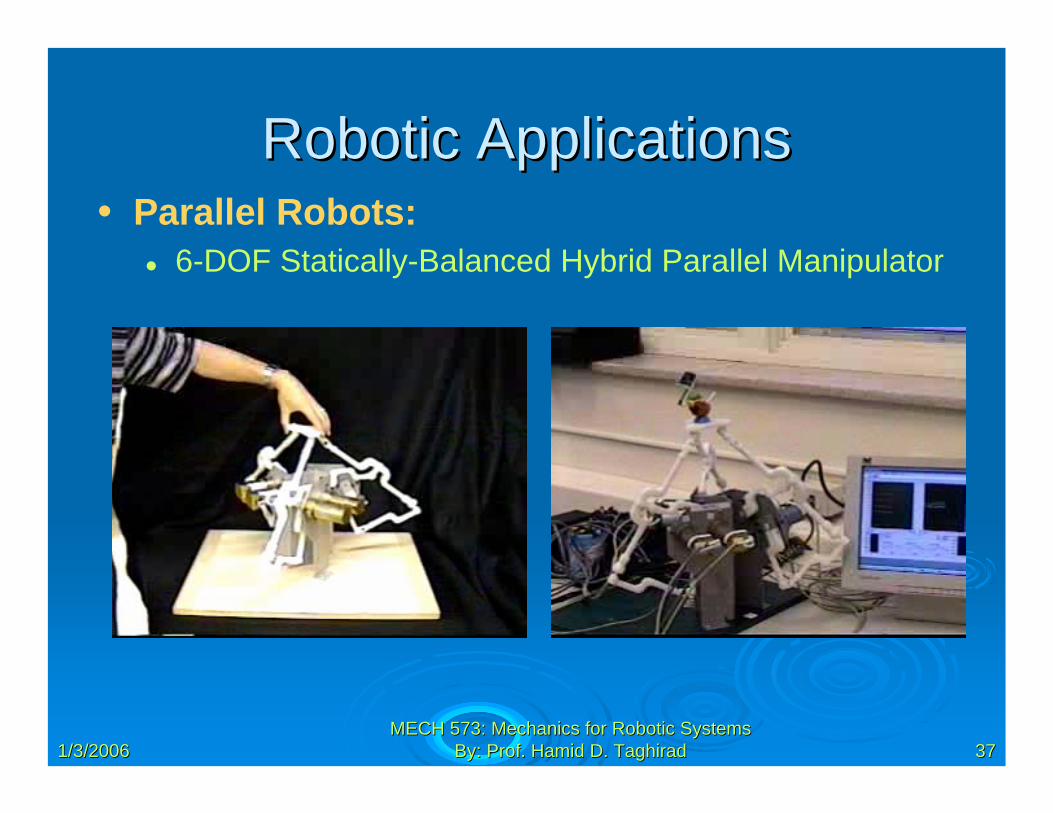
Robotic ApplicationsRobotic Applications• Parallel Robots:
6-DOF Statically-Balanced Hybrid Parallel Manipulator

1/3/20061/3/2006 3838MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
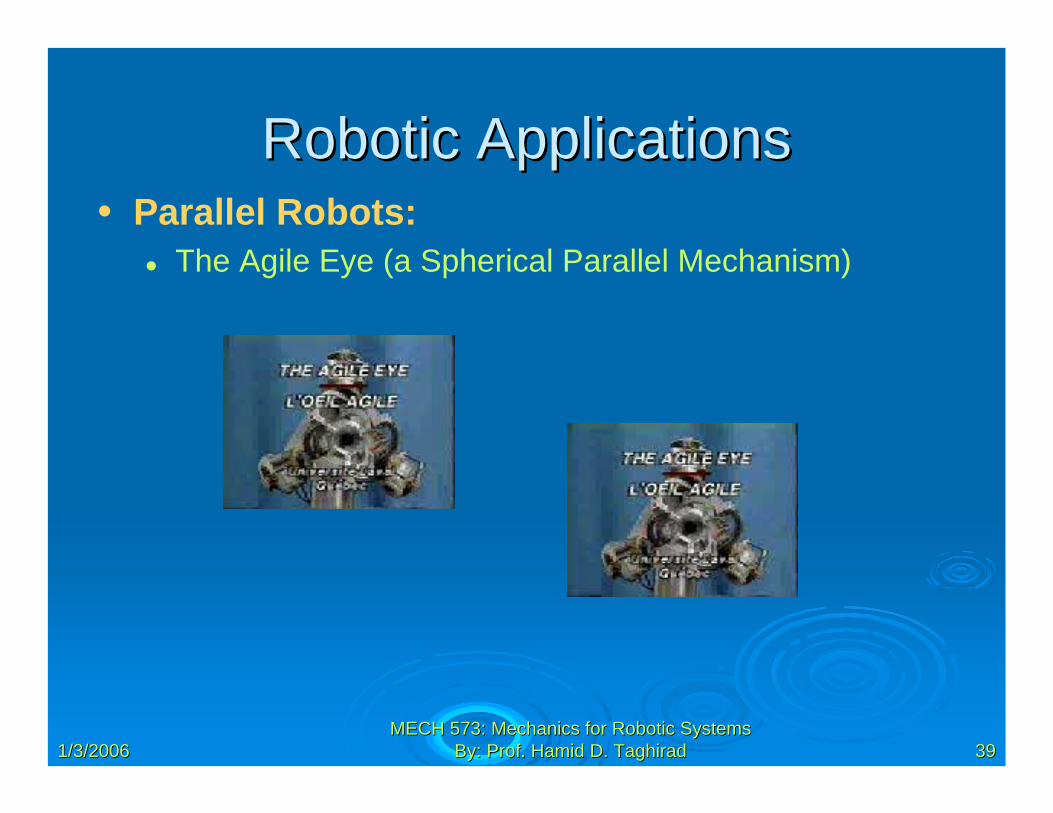
Robotic ApplicationsRobotic Applications• Parallel Robots:
The Agile Eye (a Spherical Parallel Mechanism)
1/3/20061/3/2006 3939MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
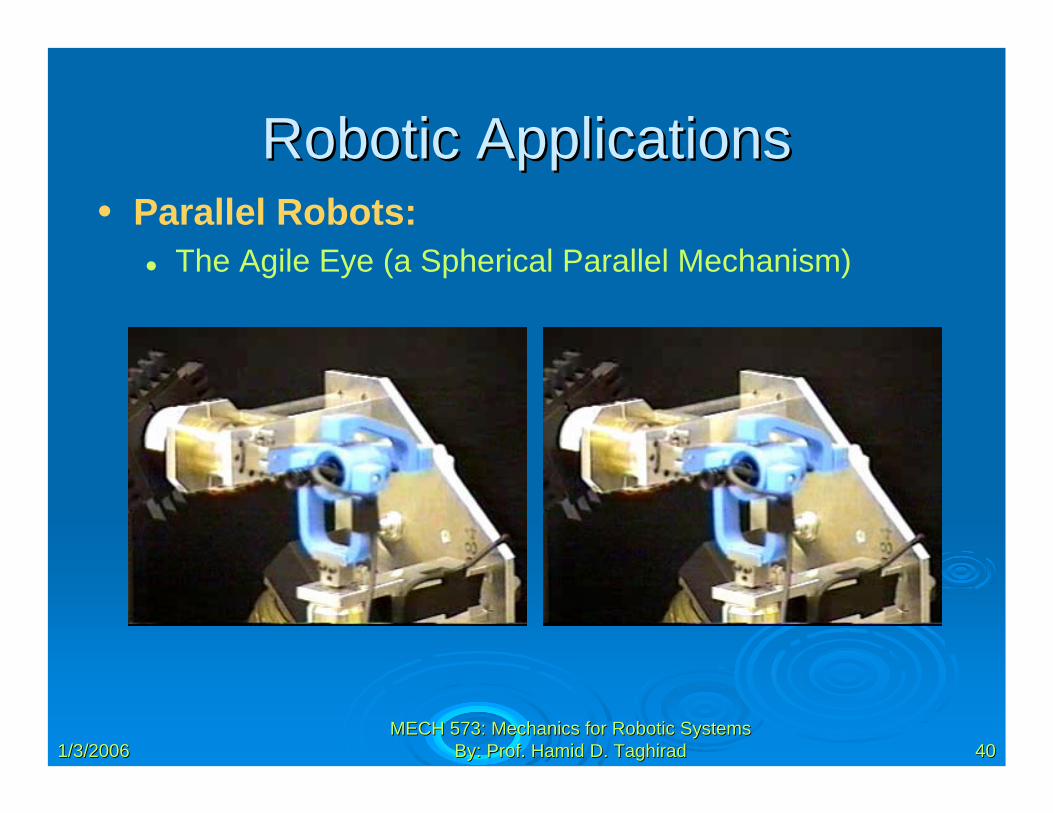
Robotic ApplicationsRobotic Applications• Parallel Robots:
The Agile Eye (a Spherical Parallel Mechanism)
1/3/20061/3/2006 4040MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Robotic ApplicationsRobotic Applications• Parallel Robots:
The Agile Eye (a Spherical Parallel Mechanism)

1/3/20061/3/2006 4141MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
MECH 573: Course ContentMECH 573: Course Content
• Introduction: Robot classificationKinematic chains Grubler criterionLoop mobility criterion Description of position and orientation
•• Rotation matrixRotation matrix•• ScrewScrew--axis representationaxis representation•• Euler angle representations Euler angle representations

1/3/20061/3/2006 4242MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
MECH 573: Course ContentMECH 573: Course Content
• Kinematics: Kinematics analysis of Serial manipulators
•• DenavitDenavit--HartenbergHartenberg conventionconvention•• Forward KinematicsForward Kinematics•• Successive screwsSuccessive screws•• Inverse Kinematics of 6R Manipulator (By Jorge Angeles)Inverse Kinematics of 6R Manipulator (By Jorge Angeles)
Kinematics analysis of parallel manipulators•• Vector loop equationsVector loop equations•• 3RRR manipulator3RRR manipulator•• Spatial orientation manipulator Spatial orientation manipulator •• Stewart Gough manipulatorStewart Gough manipulator

1/3/20061/3/2006 4343MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
MECH 573: Course ContentMECH 573: Course Content
• Jacobian: Angular and linear velocityJacobian matricesSingularity conditions Conventional Jacobians
•• 3RRR manipulator, 3RRR manipulator, •• Spatial orientation manipulatorSpatial orientation manipulator•• Stewart Gough manipulatorStewart Gough manipulator
Screw-based Jacobians
1/3/20061/3/2006 4444MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
MECH 573: Course ContentMECH 573: Course Content
• Stiffness Analysis: Force-moment relationsPrinciple of virtual work
•• 3RRR manipulator3RRR manipulator
Stiffness analysis of parallel manipulators•• Stiffness analysis of StewartStiffness analysis of Stewart--Gough platformGough platform

1/3/20061/3/2006 4545MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
MECH 573: Course ContentMECH 573: Course Content
• Dynamics: Dynamics analysis of parallel manipulatorsNewton-Euler formulation
•• Dynamic analysis of StewartDynamic analysis of Stewart--Gough platform. Gough platform. Principle of virtual work, Lagrange formulation,
•• Dynamic analysis of CKCM Robot. Dynamic analysis of CKCM Robot. General Dynamic equations
•• Properties of dynamics equationsProperties of dynamics equations
1/3/20061/3/2006 4646MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
MECH 573: Course ContentMECH 573: Course Content
• Control: Introduction to control of parallel manipulatorsPosition control topologies
•• Inverse dynamics controlInverse dynamics control•• Robust inverse dynamics control Robust inverse dynamics control
Force control topologies •• Stiffness controlStiffness control•• Direct force controlDirect force control•• Impedance control Impedance control

1/3/20061/3/2006 4747MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
MECH 573: Course ContentMECH 573: Course Content• Textbooks and References:
Lung-Wen Tsai, “Robot analysis: the mechanics of serial and parallel manipulators”, New York, Wiley, 1999.
(Available at Bookstore)(Available at Bookstore)
Jorge Angeles, “Fundamentals of robotic mechanical systems: theory, methods, and algorithms”, New York, Springer, 2nd edition 2006.
(A printed version can be purchased from Irene)(A printed version can be purchased from Irene)
M. W. Spong, S. Hutchinson, M. Vidyasagar, “Robot Modeling and Control”, New York, Wiley, November 2005.
L. Sciavicco, B. Siciliano, “Modelling and Control of Robot Manipulators” , Springer Verlag 2nd ed. 2001
Selected papers.

1/3/20061/3/2006 4848MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
MECH 573: Course ContentMECH 573: Course Content
• Marking Scheme:Assignments: 20%
•• 6 assignments6 assignmentsMid-term Exam: 40%
•• Tentative date 28/02/05Tentative date 28/02/05Term Project: 40%
•• Kinematics and stiffness analysisKinematics and stiffness analysis•• Dynamics analysisDynamics analysis•• ControlControl

1/3/20061/3/2006 4949MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
MECH 573: Course ContentMECH 573: Course Content
Hamid D. Taghirad• Office location:
McConnell Eng. Bldg. Room 423• Office hours:
Tuesday 14:00-15:00• Email:
[email protected]• URL:
http://cim.mcgill.ca/~hamid
1/3/20061/3/2006 5050MECH 573: Mechanics for Robotic SystemsMECH 573: Mechanics for Robotic Systems
By: Prof. Hamid D. TaghiradBy: Prof. Hamid D. Taghirad
Thank You


















