Robotica industrialeconsuelorodriguez.it/.../05/Robotica-industriale2018.pdf · 2018-05-10 ·...
119
Robotica industriale
Transcript of Robotica industrialeconsuelorodriguez.it/.../05/Robotica-industriale2018.pdf · 2018-05-10 ·...

Robotica industriale

Definizione di Robot
Il termine robot deriva dal termine ceco robota, che significa "lavoro pesante" o "lavoro forzato".
L'introduzione di questo termine si deve allo scrittore ceco Karel Čapek, il quale usò per la prima volta il termine nel 1920 nel suo dramma teatrale I robot universali di Rossum per identificare degli umanoidi meccanici costruiti, assemblando le varie parti del corpo prodotte separatamente, da un ingegnere di nome Rossum con la vana speranza che sarebbero stati d’aiuto agli uomini.
La diffusione del romanzo di Karel, molto popolare sin dalla sua uscita, servì a dare fama al termine Robot.

Negli anni successivi nacque una fiorente
produzione di opere letterarie di fantascienza i cui
protagonisti, fermo restando l’aspetto esterno di
umanoide meccanico, erano sempre inquietanti,
ribelli e sempre crudeli antagonisti dell’uomo.

Isaac Asimov (1920-1992)
Negli anni quaranta lo scrittore americano Isaac Asimov (1920-1992) , modificò questo modo di fare fantascienza descrivendo, in una serie di racconti, robot costruiti con lo scopo specifico di compiere determinati lavori. Ad Asimov va riconosciuto il merito di aver fatto nascere la robotica intesa come scienza della costruzione dei robot.
In seguito al successo dei racconti “Io, Robot” di Asimov, negli anni sessanta la parola robot, che fino allora aveva avuto esclusivamente un significato fantascientifico, fu adottata per individuare le prime macchine predisposte dall’industria per sostituire l’uomo in alcune attività produttive.

Le tre leggi della Robotica
Nella fantascienza, le Tre leggi della
robotica sono un insieme di leggi scritte da Isaac
Asimov, alle quali obbediscono tutti i robot che
compaiono nei suoi racconti (e in molti racconti
di altri autori).
Possono essere considerate i comandamenti che
il grande romanziere propose "affinché vengano
inseriti alla base di ogni cervello artificiale" .

Prima Legge
Un robot non può recare danno a un essere umano o permettere con l’inazione che un essere umano possa essere danneggiato.
Seconda Legge
Un robot deve ubbidire agli ordini degli esseri umani, tranne quando tali ordini entrano in conflitto con la Prima
Legge.
Terza Legge
Un robot deve proteggere la propria esistenza finché tale protezione non entri in conflitto con la Prima e la Seconda Legge.

Le Tre Leggi vennero estese con una quarta legge,
la 'Legge Zero', così chiamata per mantenere il fatto
che una legge con numero più basso soprassedesse
a una con numero maggiore.
Venne enunciata da un personaggio di Asimov, R.
Daneel Olivaw (R. sta per Robot), nel romanzo Io
Robot e l'Impero:
Legge zero
Un robot non può recare danno all'umanità, né può
permettere che, a causa del proprio mancato
intervento, l'umanità riceva danno.

ISO (International Standard Organizazion) TR 8373: Manipulating industrial robots - Vocabulary
Definizione di robot per la ISO TR 8373:
Il robot industriale di manipolazione, o
semplicemente robot, è un manipolatore
automaticamente controllato, riprogrammabile,
multiscopo, programmabile in tre o più assi
che, fisso sul posto o mobile, sia usato in
applicazioni di automazione industriale

SIRI (Associazione Italiana Robotica Industriale)
Un automa è una macchina predisposta per sostituire
l’uomo in alcune attività produttive, in particolare in alcune
lavorazioni (con l’aiuto di utensili portatili), nella
manipolazione, nel montaggio, nell’ispezione e nel
controllo, dotata di una memoria (più o meno ampia) per
immagazzinate una quantità significativa di istruzioni;
programmabile per eseguire, con diversi assi di movimento,
cicli di operazioni differenti e ripetitive; flessibile, cioè
idonea a eseguire diverse operazioni differenti

In definitiva cosa è?
Il robot è una macchina che:
1. È capace di movimentare pezzi oppure di
eseguire lavorazioni specifiche sul prodotto
senza controllo continuo dell’uomo;
2. Può essere impiegata per eseguire diversi
compiti senza subire modifiche fisiche;
3. Può convenientemente eseguire lavori
nocivi, pericolosi o particolarmente inadatti
per l’uomo.

I robot macchine intelligenti
Per i robot industriali viene spesso utilizzato
l’aggettivo intelligente in riferimento alla
capacità da parte della macchina di reagire in
modo diverso se sottoposta a situazioni
ambientali variabili. Il termine più adatto
sarebbe adattativi.

Il primo robot industriale

I Robot di servizio
Un robot di servizio opera, in modo semi o totalmente automatico, per effettuare servizi utili al benessere dell’umanità o di altri sistemi. Possono essere mobili e/o manipolativi e non possiedono la capacità di fabbricare i manufatti.
Appartengono a questa categoria:
1. Robot domestici
2. Robot impiegati:
- dagli artificieri per disinnescare ordigni
- per operare sul fondo marino
- per l’esplorazione spaziale
3. Robot utilizzati in medicina
4. ecc. ecc.



Il Centro di Cardiochirurgia Robotica del Policlinico Universitario
Campus Bio-Medico di Roma
Grazie all’utilizzo del robot “da Vinci” i chirurghi hanno potuto intervenire sul cuore senza operare alcuna apertura dello sterno. Con un’incisione di soli 3 centimetri in sede sottomammaria destra, sono stati inseriti nel corpo del paziente gli strumenti operatori montati su 2 bracci del robot. Questi strumenti hanno un diametro variabile tra i 5 e i 12 millimetri. Con l’ausilio di un terzo braccio del robot è stato posizionato il retrattore che serve a esporre il cuore. All’estremità del quarto braccio era montata la telecamera che invia immagini 3D ad alta risoluzione, dall’interno del corpo del paziente, agli oculari delle due console del robot. È da qui che i medici comandavano gli strumenti operatori, mentre l’équipe seguiva tutte le fasi dell’intervento da un monitor 3D-HD comunicando con interfono.




Pesci robot per controllare l’inquinamento del
mare

Classificazione dei Robot industriali
Classificazione Criterio
Cinematica Caratteristiche geometriche e cinematiche (tipo di
movimenti)
Funzionale Tipo di applicazione
Operativa Modalità di controllo dei movimenti del braccio
Dinamica Caratteristiche energetiche degli attuatori
Sensoriale Capacità percettive dei robot in relazione al proprio stato e
a quello del mondo esterno

Architettura dei robot: Componenti
principali
Il robot è costituito da:
• Struttura meccanica: insieme di corpi rigidi
uniti tra di loro da articolazioni o giunti che ne
assicurano il moto relativo.
• Sistema di azionamento dei giunti (o sistema
di attuazione)
• Sistema di comando (Unità di governo +
Sensori)

1 – 2 – 3 – 4: attuatori a - b - c – d: sensori

Il sistema robot è un sistema a retroazione ovvero ad
anello chiuso.
Dall’unità di governo partono gli ordini per il sistema di
azionamento che, attraverso gli attuatori, muove la
meccanica; questa interagisce con il mondo esterno
svolgendo il compito assegnato ai robot.
Per mezzo di opportuni sensori vengono rilevate tutte
quelle grandezze che costituiscono il feedback
(retroazione) necessario all’unità di governo per
gestire l’intero sistema.

Struttura meccanica
La struttura meccanica dei robot industriali è
costituita da una catena cinematica aperta,
formata da elementi posti in serie (a), o chiusa,
realizzata da elementi posti in parallelo (b).


Nomenclatura (ISO 8373)

Gradi di libertà
Per posizionare e orientare arbitrariamente un
corpo nello spazio occorrono 6 gradi di libertà:
3 di traslazione (parallelamente agli assi
coordinati) e 3 di rotazione (attorno agli stessi
assi).

Giunti
I giunti sono accoppiamenti meccanici che collegano due corpi rigidi.
In base alle possibilità di movimento che consentono possono essere:
rotoidali: consentono 1 GDL di rotazione
prismatici: consentono 1 GDL di traslazione
cilindrici: consentono 2 GDL: 1 di rotazione e uno di traslazione
sferici: consentono 3 GDL di rotazione
elicoidali: consentono 2 GDL: 1 di rotazione e uno di traslazione che non sono indipendenti tra di loro

GDL di un giunto
Considerandone uno fisso che funga da
vincolo, il numero di movimenti possibili
dell’altro stabilisce il numero di GDL del
giunto

Giunti ad un grado di libertà
Il giunto prismatico permette un moto relativo traslatorio, come ad esempio un manicotto che scorre su una guida lineare .
Il giunto rotoidale permette un moto relativo rotatorio.

Giunto cilindrico
2 GDL: 1 di rotazione e 1 di traslazione
Il giunto cilindrico permette due GDL, infatti il
sistema a valle può soltanto ruotare attorno
all'asse del giunto e traslare lungo esso.
Un esempio pratico di un giunto di questo tipo
è un cilindro in cui lo stelo, oltre alla
possibilità di traslare, ha anche quella di
ruotare attorno al suo asse.

Giunto sferico
3 GDL di rotazione
Un giunto ha tanti gradi di libertà quante sono le possibilità di movimento relative permesse ai due corpi rigidi che collega.
Nella realtà possono essere realizzati dei giunti che permettono fino a tre gradi di libertà.
Il giunto sferico permette ad esempio tre possibilità di spostamento relative ai due oggetti che collega.
Un esempio molto semplice dell'utilizzo di questo giunto si ha nei porta penna orientabili.
In tal caso i gradi di libertà permessi sono tre, in quanto la penna può essere ruotata sia attorno ad un asse verticale che attorno a due assi orizzontali ortogonali tra loro. In altre parole un solo giunto sferico permette di orientare in tutti i modi possibili un oggetto.

Giunto elicoidale 2 GDL: 1 di rotazione + 1 di traslazione tra loro dipendenti
Il giunto elicoidale permette un movimento relativo elicoidale, cioè una rotazione intorno ad un asse accompagnata da una traslazione lungo lo stesso.
Tale movimento si realizza ad esempio tra una vite ed il suo dado

GDL di un robot
I robot, come tutte le strutture meccaniche
realizzate con parti rigide collegate fra loro da
giunti, sono caratterizzati dal numero di gradi
di libertà. Tale numero dipende dal tipo di
giunti utilizzati e dal loro numero.

Classificazione cinematica dei robot La classificazione più significativa dei robot viene fatta con riferimento al tipo di coordinate idonee ad individuare la posizione dell’attuatore finale, o meglio di un suo punto di riferimento, in funzione dei movimenti dei 3 assi principali.
Si hanno robot:
- Cartesiani detti PPP perché realizzati con 3 giunti prismatici
- Cilindrici detti RPP perché ottenuti con 1 giunto rotoidale e 2 giunti prismatici
- Polari o sferici detti RRP
- Articolati o angolari detti RRR
- Paralleli
-- SCARA detti RRP

Robot cartesiani
Robot i cui bracci hanno 3 giunti prismatici e i
cui assi sono coincidenti con quelli di un
sistema cartesiano
Sono anche detti lineari or rettangolari e sono
costruiti in varie forme:
- ad assi sovrapposti
- a montante
- a portale

Questi robot realizzano i tre movimenti principali utilizzando tre accoppiamenti
prismatici orientati secondo tre assi ortogonali tra loro. Di conseguenza il
volume di lavoro è un parallelepipedo le cui dimensioni sono fissate dalle
corse dei singoli giunti.
I robot cartesiani possono essere realizzati con una struttura a portale o a
montante.
L'utilizzo di giunti lineari semplifica la programmazione e il controllo dei
movimenti del braccio. Si immagini infatti di utilizzare come sistema di
riferimento una terna di assi ortogonali paralleli a quelli lungo cui avviene il
movimento dei giunti. In tal caso ogni spostamento parallelo agli assi
coordinati viene eseguito con un uguale spostamento dell'asse
corrispondente. Considerando che un generico spostamento nello spazio può
essere facilmente scomposto in tre spostamenti paralleli agli assi di
riferimento è facile capire perchè la programmazione dei movimenti risulti

Robot cartesiano con struttura a portale: Il principale vantaggio della struttura
a portale è quello di permettere una precisione di posizionamento elevata ed
uniforme in tutto lo spazio di lavoro.

Robot in cui il portale è ridotto ad uno solo dei due assi orizzontali.

L'utilizzo di questa struttura semplifica
notevolmente l'integrazione del robot, nel layout
dell' impianto. La scelta di realizzare dei robot
con questa struttura fu probabilmente suggerita
dall'idea di sostituire l'operatore umano con una
macchina che ne riproducesse, per quanto
possibile, le capacità di manipolazione. Essi
vengono installati ai bordi dell'area di lavoro e
possono essere assimilati a degli uomini che,
vicino al bordo del bancone di lavoro, eseguono
operazioni di assemblaggio. Ciò facilita le
possibilità di integrazione del robot all'interno
dell'impianto produttivo in quanto non va ad
intaccare la continuità del sistema di
movimentazione; ne deriva tuttavia l'impossibilità
di aggirare degli ostacoli presenti nel piano di
lavoro, qualora questi siano compresi tra la pinza
di manipolazione ed il montante della struttura.
Robot cartesiano con struttura
a montante

La struttura a montante presenta una minore rigidezza rispetto a quella a
portale. Infatti gli assi di scorrimento lineare sono supportati in un singolo
punto, mentre nei robot a portale le guide prismatiche per il movimento nel
piano sono sostenute ad entrambi gli estremi. Per questo motivo il loro
volume di lavoro è quasi sempre modesto ed il loro utilizzo
limitato ad operazioni di assemblaggio leggero.
Particolare cura dovrà essere posta nella realizzazione dell'asse Z (il terzo)
in quanto sul suo supporto potranno agire momenti notevoli, qualora si
vadano a manipolare carichi elevati con notevole sbraccio (la distanza tra
quest'ultimo ed il piano degli assi X ed Y).
Trattandosi comunque ancora di una struttura cartesiana sarà possibile
raggiungere la stessa precisione di posizionamento ottenibile con quella a
portale, ma a prezzo di un irrigidimento della struttura che significa un
aumento di peso e quindi l'impossibilità di raggiungere prestazioni
dinamiche elevate.

Vantaggi:
- Moti lineari dei tre assi principali
- Modello cinematico semplice
- Struttura rigida
- Elevata accuratezza di posizionamento
Svantaggi:
- Spazio di lavoro ristretto e comunque più piccolo dell’ingombro del robot
- Giunti prismatici di rendimento inferiore a quelli rotoidali
- I giunti devono essere protetti dalla polvere
- Possono operare solo sulla parte superiore o laterale degli oggetti
- Non elevata velocità di lavoro sul piano orizzontale

Robot tinteggiatore

Robot cilindrici RPP
Si dicono cilindrici i robot i cui bracci formano un sistema di coordinate
cilindriche; sono composti da un braccio orizzontale, scorrevole su un asse
verticale, montato su una base rotante; avendo un giunto rotante e due giunti
prismatici l catena cinematica consente una rotazione e due traslazioni


Vantaggi:
- Discreto volume di lavoro
- Modello cinematico semplice
- Buona accessibilità nelle cavità
- In abbinamento all’attuazione idraulica i pesi trasportati (carichi paganti) possono raggiungere valori notevoli
Svantaggi:
- Retro del robot non accessibile
- Giunti prismatici meno efficienti di quelli rotoidali
- Guide difficili da sigillare
- Accuratezza di posizionamento dipendente dalla distanza della pinza dalla colonna
- Non elevata velocità sul piano orizzontale

Robot polari (o sferici) RRP
Possono considerarsi derivati da quelli cilindrici
nei quali lo spostamento verticale viene
sostituito con l’inclinazione del braccio.


La struttura viene definita sferica in quanto il volume di lavoro è un settore di
sfera. I due giunti rotatori descrivono infatti due archi perpendicolari fra loro
mentre quello lineare determina il raggio della superficie sferica da essi
descritta, variabile tra un minimo (sfilo contratto) e un massimo (sfilo esteso).

Robot articolati RRR
I robot articolati o RRR,
sono automi i cui bracci
hanno almeno 3 giunti
rotanti in molti casi tutti i
giunti sono ti tipo rotante.
Si dicono anche
antropomorfi per la loro
somiglianza con il
braccio umano.

Robot articolato applicato in telechirurgia




La sua configurazione è in realtà complessa essendo molto influenzata dalle
effettive possibilità di movimento dei giunti. La struttura articolata è molto
diffusa in quanto compatta e versatile. Infatti i robot articolati, a parità di
dimensioni, riescono a coprire un piu' ampio volume di lavoro rispetto alle altre
strutture.

Rappresentazione delle quattro diverse possibilità che questi robot
hanno per raggiungere i punti del loro volume di lavoro con ovvi vantaggi
per la possibilità di evitare degli ostacoli eventualmente presenti nel
campo di lavoro.

L'abilità di raggiungere facilmente delle posizioni comunque collocate
rispetto al basamento è riportata in figura che mostra come il robot possa
scendere al di sotto della quota della base (a),estendersi verso l'alto (b) e
infine prelevare dei pezzi alle sue spalle con una semplice rotazione
attorno al secondo grado di libertà (c); a tutto ciò si aggiunge la possibilità
di montarlo a soffitto (d) che permette di annullare il già ridotto ingombro
in pianta.

Robot paralleli
I robot paralleli
hanno una
struttura a catena
cinematica
chiusa; possono
essere a 4 o a 6
bracci ognuno dei
quali possiede
giunti prismatici e
sferici o rotoidali.

Robot SCARA (Selective Compilance Assembly Robot Arm -
Braccio robotizzato per assemblaggio con cedevolezza differenziata)
I robot SCARA sono automi a configurazione articolata orizzontale la cui struttura è del tipo in figura.
Hanno due o tre giunti ad assi verticali e paralleli e si possono considerare derivanti da una combinazione tra robot cilindrico e articolato.
Le applicazioni in cui gli SCARA si stanno imponendo sono
quelle dell'assemblaggio e della movimentazione leggera.


Par
amet
ri d
ei r
ob
ot




http://www.patreider.com/pagina%20prodotti%20azienda.htm


Ad andare in avanscoperta nei siti radioattivi di Fukushima sono stati due
robot chiamati PackBot. Di provenienza statunitense e in dotazione
all’esercito a stelle e strisce, sono stati affidati alla Tepco, la società che
gestisce la centrale. Dotati di appositi sensori per le misurazioni richieste,
gli automi, comandati con fibra ottica, sono anche in grado di aprire porte
bloccate.

Per quanto inquietante possa essere questa macchina, questo robot di nome Virtobot
potrebbe un giorno rendere la vita più facile ai dottori, rendendo disponibili le autopsie anche
ad altri dottori.
Utilizzata attualmente presso l’Università di Berna nell’Istituto di Medicina Legale, questa
creatura è in grado di eseguire “autopsie virtuali” in tutto e per tutto. In altre parole i cadaveri
scivolano all’interno dello scanner 3D per le indagini, il tutto senza mai aprire il cranio del
morto o affettare alcun lembo di carne. L’obiettivo è quello di fornire agli investigatori
informazioni sui decessi, per aver eventualmente nuovi elementi di prova da usare in cause
legali.

Chirurgia robotica





Sistemi di azionamento dei giunti
I giunti sono azionati da attuatori che possono
essere:
- Pneumatici;
- Idraulici
- Elettrici

Attuatori pneumatici
Sono sempre meno utilizzati nella costruzione dei bracci robotici a causa della difficoltà di ottenere un preciso controllo di posizione; largo impiego hanno invece nella realizzazione degli organi di presa e dei manipolatori a sequenza fissa (sistemi in grado di raggiungere in sequenza solo alcune posizioni dello spazio; le posizioni e la loro sequenza sono stabilite in fase di progettazione e non possono essere modificate). Sono quasi esclusivamente utilizzati nei robot più piccoli, dotati di pochi gdl (2-4), spesso limitati alle semplici operazioni di pick and place; Vantaggi:
Potenze specifiche elevate - Velocità di movimento elevata - Assenza di surriscaldamento - Assenza di scintille - Facile manutenzione - Basso costo - Sviluppati per azionare qualsiasi tipo di giunto Svantaggi -Precisione solo sa fine corsa -Velocità non costante -Instabilità dinamica

Attuatori idraulici
Sono utilizzati nei robot che movimentano grandi carichi.
Vantaggi:
- Grandi potenze specifiche (fino a 3.5 KW/kg)
- Velocità costanti al variare del carico
- Elevate coppie ed accelerazioni
- Forze costanti
- Elevate velocità
- Buona precisione di posizionamento
- Assenza di scintille
Svantaggi:
- Difficoltà di sistemazione delle tubazioni
- Possibili perdite d’olio
- Dissipazione di potenza nelle valvole
- Basso rendimento energetico ed elevate perdite
- Ingombro della centralina idraulica (l’olio in pressione deve essere prodotto sul posto)
- Rumorosità
- Manutenzione frequente
- Costo elevato

Attuatori elettrici
L’85% degli azionamenti robotici è oggi di tipo
elettrico.
I motori utilizzati sono del tipo brushless e
quelli passo-passo nel campo delle basse
potenze. Tali motori sono infatti quelli che
meglio soddisfano le esigenze di controllo.

Servomotore
Il servomotore (dispositivo inserito all’interno del sistema per regolare automaticamente una grandezza meccanica) opera secondo lo schema ad anello chiuso per soddisfare le esigenze di controllo.
Questo può essere:
- Controllo di velocità: consiste nel mantenimento di tale grandezza sul valore desiderato, anche nelle fasi di accelerazione, sia positiva che negativa;
- Controllo di posizione: consiste nel pilotare il motore in modo da garantire la richiesta precisione di posizionamento degli organi mossi dall’albero; deve essere gestito anche il bloccaggio del rotore nella posizione raggiunta
- Controllo di movimento: Consiste nell’azione contemporanea del sistema sia sulla posizione che sulla velocità

Vantaggi:
- Facilità di alimentazione
- Possibilità di montaggio diretto sui giunti
- Precisione e affidabilità del comando
- Assenza d’inquinamento e di perdite d’olio
- Ottimo rendimento
- Manutenzione semplice
- Ampia gamma di prodotti disponibili sul mercato
- Costo relativamente basso
Svantaggi:
- Non elevato rapporto potenza/peso
- minori coppi massime rispetto agli attuatori idraulici
- Possibilità di surriscaldamento
- Possibilità di emissione di scintille

I Sensori
Assolvono al compito di comunicare in tempo
reale all’unità di governo la situazione
presente sul campo (cioè nell’ambiente
controllato) in ogni istante del ciclo di
lavorazione

- Adatattivi: sono i robot con il più elevato livello
percettivo disponendo di sensori in grado di
inviare informazioni, oltre che sullo stato del
braccio e dell’ambiente circostante, anche
sull’interazione in atto tra essi.

Classificazione dei sensori
I sensori usati come dispositivi periferici nei
robot possono essere classificati in due
categorie:
sensori interni al robot
sensori esterni al robot

I Sensori interni o propriocettivi
Rilevano grandezze fisiche proprie del robot,
ovvero inerenti alla struttura meccanica
dell’automa come per esempio posizioni,
velocità e accelerazioni dei vari link.
Allo scopo sono utilizzati poenziometri,
resolver, encoder, dinamo tachimetriche,
sensori di forza.

Sensori esterni o eterocettivi
Inviano all’unità di governo la descrizione del
mondo esterno al robot misurando grandezze
relative all’ambiente nel quale esso opera
come per esempio distanza da eventuali
ostacoli, posizioni e velocità di altri
componenti il sistema di automazione,
posizione ed orientamento di oggetti da
manipolare, forze scambiate, forme di oggetti
circostanti.

Classificazione dei sensori esterni
Si distinguono:
- Sensori a contatto: sono sensibili ad azioni
fisiche, direttamente applicate ad essi, come
per esempio il tatto ed il movimento
- Sensori a distanza: rilevano alcune
caratteristiche del mondo esterno, senza
contatto fisico diretto, per mezzo di onde
acustiche o elettromagnetiche

Sensori di prossimità
Indicano la vicinanza di un oggetto al sensore
prima che tra i due venga stabilito un
contatto.
Usati anche per indicare la distanza reale
dall'oggetto.

Sensori tattili:
Determinano se si stabilisce un contatto tra sensore
e oggetto.
Possono essere divisi in:
sensori di contatto. Indicano semplicemente se
viene stabilito o meno un contatto con l'oggetto;
sensori di forza. Indicano l'entità della forza
scambiata con l'oggetto. Possono essere utilizzati
per determinare la forza che la pinza applica
nell’afferraggio dell’oggetto


Visione artificiale e sensori ottici
Sistemi di visione artificiale: in grado di
vedere ed interpretare lo spazio di lavoro e
sono usati per ispezioni, identificazioni di
parti, guide ed altri compiti simili.
Sensori ottici: usati per vari scopi. Ad es. le
fotocellule possono rilevare la presenza o
l'assenza

Sensori vari :
Comprendono i restanti sensori utilizzabili in
robotica come i dispositivi per la misura della:
temperatura
pressione
tensione elettrica

Esempi di applicazione della
visione artificiale:
a) Ispezione in linea di parti
b) Identificazione delle parti
(per forma), ispezione e
scarto delle parti difettose

c) Uso della visione
artificiale per fornire al
robot input relativi alla
posizione della parte.
d) Identificazione della
forma delle parti da
verniciare per la definizione
dei corretti movimenti della
pistola

Classificazione sensoriale dei robot
- Ad anello aperto: senza ritorno di informazioni
che non siano quelle inviate dai finecorsa per
comunicare la fine del movimento degli
attuatori; è tipico dei manipolatori pneumatici
o idraulici i cui bracci si muovono tra due
posizioni stabili

- Ad anello chiuso: con feedback del campo
che riporta all’unità di governo i dati relativi a
posizione e velocità dei vari link in movimento
in modo tale che il sistema possa effettuare,
se necessario, le correzioni per mantenere i
valori stabiliti per lo svolgimento del ciclo di
lavoro

L’attuatore finale o dispositivo di estremità
(end effector)
L’attuatore finale è la parte terminale dei robot, ovvero quella che viene a contatto con gli oggetti sui quali esso deve operare.
Sono fissati al polso per permettere al robot multifunzionale di realizzare un’applicazione specifica.
Si distinguono:
- Organi di presa o pinze (gripper)
- Utensili (tools)

Utensili
Utilizzati in applicazioni ove il robot realizza operazioni tecnologiche sulla parte in lavorazione.
Il robot deve controllare il funzionamento dell'utensile oltre alla sua posizione rispetto al pezzo in lavoro deve essere in grado di trasmettere segnali di controllo all'utensile per l'avvio, l'arresto e la regolazione dell'azione.
Esempi di utensili usati come dispositivi di estremità:
torce per operazioni di saldatura;
pistole per la verniciatura a spruzzo;
mandrini rotanti per operazioni di foratura, di rettifica, ecc.;
utensili per operazioni di assemblaggio;
ugelli per il taglio a getto d'acqua

Pinze
Usate per afferrare e manipolare oggetti (usualmente parti in lavoro) durante il ciclo di lavoro.
Applicazioni tipiche: operazioni di carico e scarico macchine.
Se il ciclo prevede l'utilizzo di più utensili questi, anziché essere fissati direttamente al polso, possono essere afferrati da una pinza che prende la forma di un porta utensili.
Esempi di pinze usate come dispositivi di estremità:
pinze con dita meccaniche;
pinze a vuoto che utilizzano delle ventose per afferrare oggetti piani;
pinze con dispositivi magnetizzati per reggere parti ferrose.



Ai manipolatori industriali
a braccio può essere
abbinata una pinza
pneumatica costruita su
misura per il cliente. La
pinza può avere, in
funzione delle esigenze
di movimentazione dei
carichi, sino a tre assi di
rotazione, sia motorizzati
pneumaticamente che
manuali.


I manipolatori industriali
pneumatici possono effettuare
la presa degli oggetti da
sollevare anche con ventose,
costruite in funzione del carico
che il cliente deve
movimentare. L'organo di
presa a ventosa può essere
dotato di rotazioni su tre assi,
sia manuali che motorizzate
pneumaticamente.
La generazione del vuoto
all'interno delle ventose
avviene solitamente mediante
l'utilizzo dell'aria compressa,
ma anche con pompe per
vuoto ad alimentazione
elettrica.

Manipolatori
industriali a
braccio con
attrezzo di presa
a ventosa per
vetri , pannelli e
lamiere. Sono
disponibili in
diverse versioni
con dispositivi di
rotazione e
basculamento per
soddisfare le
diverse necessità
di
movimentazione.


Manipolatori industriali a braccio con attrezzo di presa
magnetico.
La presa ed il rilascio del carico avvengono tramite un attuatore
pneumatico comandato dall'impugnatura del manipolatore.

Scelta ottimale della presa Il problema della scelta automatica
della migliore presa di un oggetto
deve in pratica affrontare i seguenti
3 sottoproblemi:
− stabilità della presa;
− accessibilità delle superfici di
presa;
− accuratezza nella presa;
− evitare il danneggiamento
dell'oggetto

Applicazioni dei robot
Di seguito sono elencati i principali requisiti per l’applicazione dei robot, ovvero condizioni che favoriscono la sostituzione dell'uomo con robot nei processi industriali:
Ambiente di lavoro pericoloso. I processi produttivi che comportano ambienti di lavoro pericolosi o che sono particolarmente gravosi si prestano alla robotizzazione (pressofusione, fucinatura, verniciatura, saldatura, ecc.).
Cicli di lavoro ripetitivi. Se la sequenza delle fasi di un ciclo é sempre la stessa e consiste in movimenti abbastanza semplici, un robot é in grado di realizzare il ciclo con maggiore precisione e ripetibilità rispetto all'uomo ( > qualità).
Difficoltà di movimentazione. Se un'operazione comporta la movimentazione di parti o utensili pesanti o comunque di difficile manipolazione, é conveniente utilizzare un robot con adeguata capacità di carico in sostituzione dell'uomo.

Principali applicazioni dei robot
Operazioni su più turni. Il ritorno economico ottenuto sostituendo l'uomo con robot sarà molto più rapido nelle lavorazioni che si svolgono su più turni di lavoro.
Volumi di produzione elevati. Nelle celle robotizzate, al variare del prodotto é necessario riattrezzare e riprogrammare il robot l'applicazione dei robot é meglio giustificata nelle grandi produzioni ove le variazioni sono infrequenti.
Posizione ed orientazione della parte stabilite. La maggior parte dei robot non é in grado di riconoscere l’ambiente di lavoro. La possibilità di raccogliere oggetti nel corso del ciclo si basa sul fatto che questi si trovino in posizioni ed orientazioni note. A tale scopo, deve essere sviluppato un dispositivo che presenti le parti sempre nella stessa posizione ed orientazione.

Celle di lavoro robotizzate
Nelle applicazioni industriali i robot operano
generalmente con altri componenti come
convogliatori, pallet, macchine utensili, attrezzature
di fissaggio, ecc.
È importante che le apparecchiature della cella di
lavoro siano organizzate in un layout efficiente.
Tre sono i layout fondamentali utilizzati:
• cella con robot centrale
• cella con robot in linea
• cella con robot mobile

Celle con robot centrale Robot posizionato centralmente con le altre apparecchiature
disposte intorno ad esso.
Layout adottato nelle installazioni in cui un singolo robot viene messo al servizio di più macchine di produzione.
Applicazioni: operazioni di carico e scarico macchine.

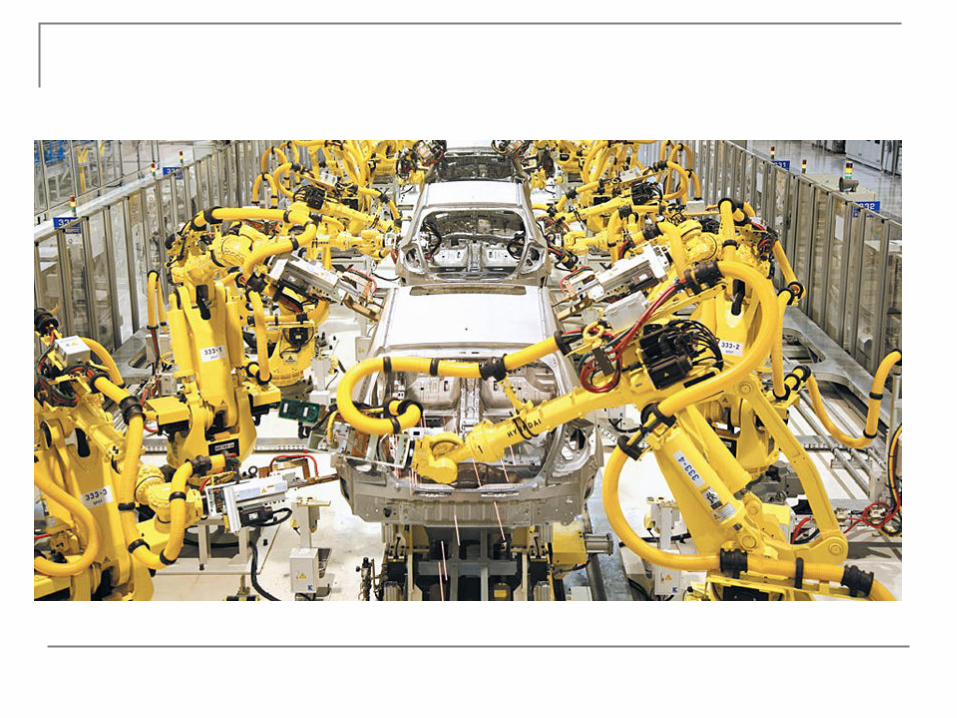
Celle con robot in linea
Più robot posizionati lungo un sistema di trasporto.
Il sistema di trasporto presenta le parti in modo tale che ciascun robot realizzi una determinata operazione di assemblaggio o tecnologica su ciascuna di esse.
Layout tipico delle linee di saldatura delle carrozzerie automobilistiche.

Celle con robot mobile
Robot montato su una base mobile che ne permette il movimento entro la cella.
Meccanismo di trasporto formato da rotaie aeree o di terra che consentono di muovere il robot lungo una traiettoria rettilinea.
Applicazioni: robot al servizio di più macchine che non possono essere disposte secondo un layout con robot centrale (ad es. perché separate da distanze superiori alla capacità di estensione del braccio del robot).

Applicazioni industriali dei robot
Le applicazioni industriali attuali, concentrate
nella produzione, possono essere classificate
in tre categorie:
movimentazione di materiali
operazioni tecnologiche (di processo)
operazioni di assemblaggio ed ispezioni