ROBOT SOCCER Junaidi bin Aziz (A148904) Mohamad Azwan bin Halim (A148647) Phe Yeong Kiang (A152076)
12
ROBOT SOCCER • Junaidi bin Aziz (A148904) • Mohamad Azwan bin Halim (A148647) • Phe Yeong Kiang (A152076)
-
Upload
virgil-cole -
Category
Documents
-
view
232 -
download
3
Transcript of ROBOT SOCCER Junaidi bin Aziz (A148904) Mohamad Azwan bin Halim (A148647) Phe Yeong Kiang (A152076)
ROBOT SOCCER• Junaidi bin Aziz (A148904)• Mohamad Azwan bin Halim (A148647)• Phe Yeong Kiang (A152076)

semi-Automatic 3 vs 3 League
• Androsot is the newest type of Robot Soccer realized by Humanoid Robot. • In Androsot competition of semi-Automatic 3 vs
3, there are two teams with 3 robots to compete.• The operation mode is mixed with automatic
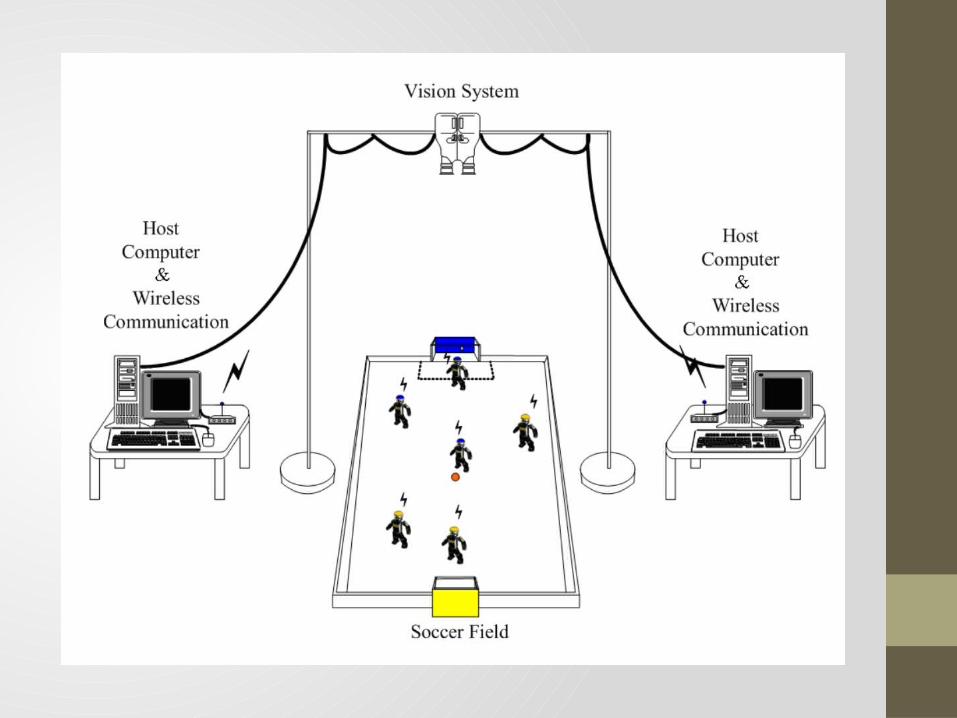
control method based on camera vision and remote control based on wireless communication.
semi-Automatic 3 vs 3 League
• Each team have 3 robots with wireless control.• At least one of the three players use automatic
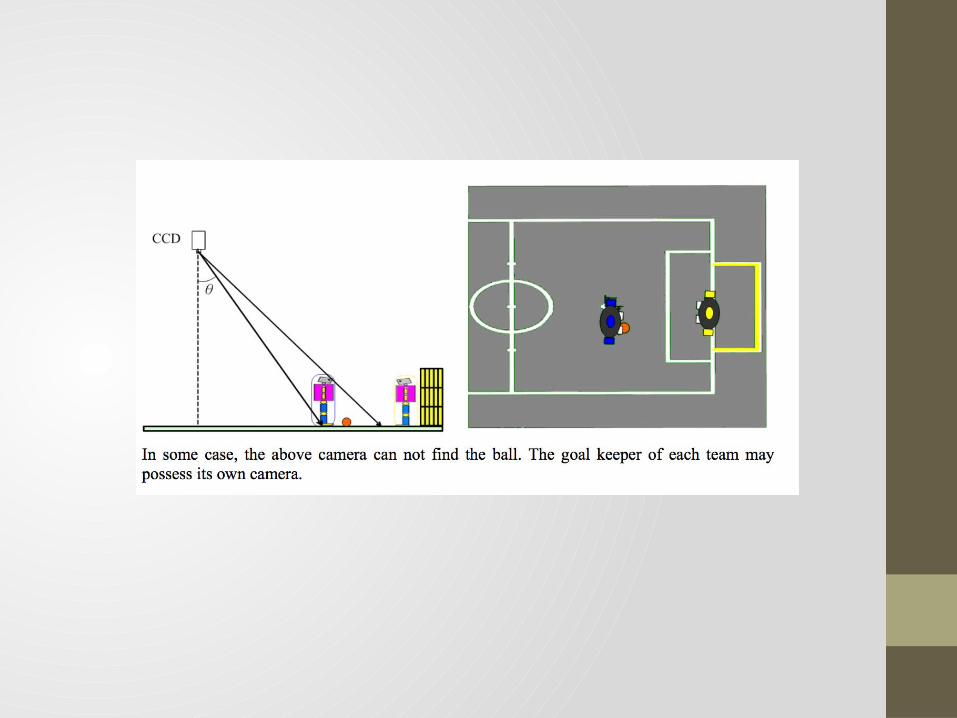
control method based on vision.• Only one computer to control.• There are only two or one camera outside the
robot for each team’s vision control. But, the number of the camera inside the robot will not limited.• There is only one player to control the robots.

semi-Automatic 3 vs 3 League
• Each team have 3 robots with wireless control.• At least one of the three players use automatic control
method based on vision.• Only one computer to control.• There are only two or one camera outside the robot for
each team’s vision control. But, the number of the camera inside the robot will not limited.• There is only one player to control the robots.
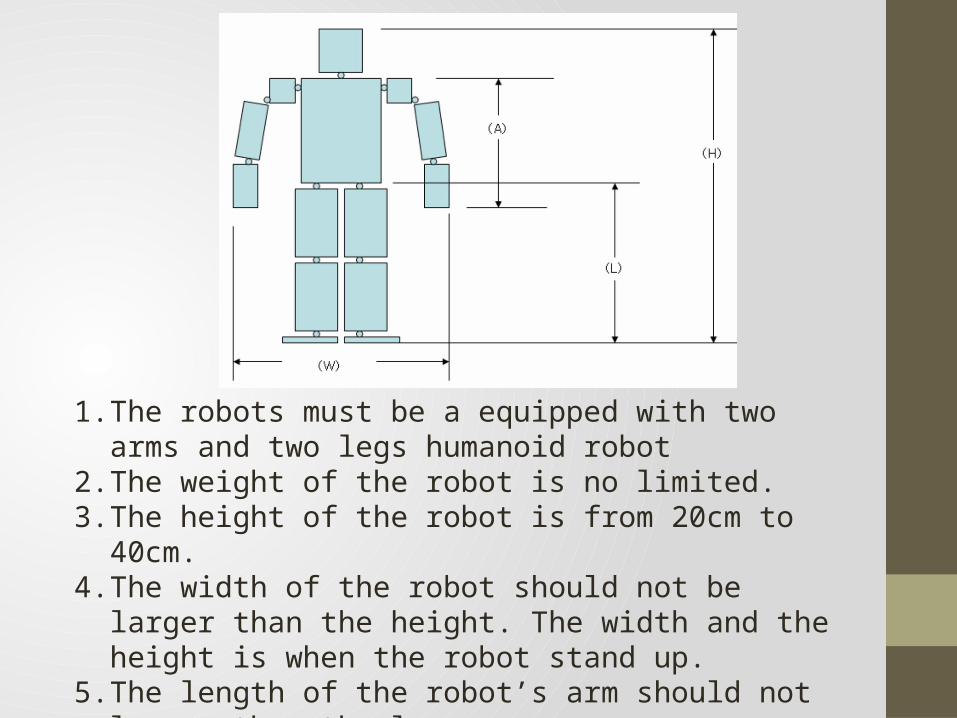
1. The robots must be a equipped with two arms and two legs humanoid robot
2. The weight of the robot is no limited.3. The height of the robot is from 20cm to 40cm.4. The width of the robot should not be larger than the height.
The width and the height is when the robot stand up.5. The length of the robot’s arm should not longer than the leg.6. The intercrossing sole is not allowed.
SCENARIOS
• Robot not stable, keep falling down• Black robots give respond to the ball much more
better than white robots• Defending technique is by making the robot fall it
body to the field• White robots moving to the outside of the field
not to the ball• White robots is not stable and late respond to
situation
STRATEGIES
• The goalie will drop his body to defend• The goalie is using his head• The attackers move faster to get the ball• Defender will not move far from the goal
area to keep defending
CONCLUSION
• As conclusion, the robot must fast respond to any situation• The stability of the robot need to improve
so it will moving faster and easily without dropping his body• The wireless transmission need to be
improve so it will not lost connection