Navigating the Intersections. Navigating the Intersections My Personal Inquiry.

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
Robot Dogs, Intelligent Intersections, and Connect
Four: One Student’s AI Research Experience
Kurt Dresner Peter Stone
Learning Agents Research Group
Department of Computer Sciences
The University of Texas at Austin
UT SURGeDecember 2, 2005
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
Who I AmWhat I’m Going To Talk AboutWhy I Came To UT
Who I Am
PhD Student in UT’s CS Department
Started in 2002
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
Who I AmWhat I’m Going To Talk AboutWhy I Came To UT
What I’m Going To Talk About
My academic experience so far
Projects I’ve worked on
My current research
Other stuff I’m interested in
What I’ve got left to do
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
Who I AmWhat I’m Going To Talk AboutWhy I Came To UT
Why I Came To UT
Well respected
Liked the research I saw when I visited
Very well-rounded program∗
Excited about Austin
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
First Things FirstUT Austin VillaLooking for Research
First Things First
UTCS emphasizes research from day one
Courses (no quals)
Picking someone to work with
Ways To Choose An Advisor
Find someone doing something that interests you
Find someone willing to do something that interests you
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
First Things FirstUT Austin VillaLooking for Research
RoboCup
“By the year 2050, develop a team of fully autonomous humanoidrobots that can win against the human world soccer championteam.”
Leagues:
Simulation
Small Size
Middle Size
4-Legged
Humanoid (new)
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
First Things FirstUT Austin VillaLooking for Research
RoboCup
“By the year 2050, develop a team of fully autonomous humanoidrobots that can win against the human world soccer championteam.”
Leagues:
Simulation
Small Size
Middle Size
4-Legged
Humanoid (new)
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
First Things FirstUT Austin VillaLooking for Research
RoboCup
“By the year 2050, develop a team of fully autonomous humanoidrobots that can win against the human world soccer championteam.”
Leagues:
Simulation
Small Size
Middle Size
4-Legged
Humanoid (new)
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
First Things FirstUT Austin VillaLooking for Research
RoboCup
“By the year 2050, develop a team of fully autonomous humanoidrobots that can win against the human world soccer championteam.”
Leagues:
Simulation
Small Size
Middle Size
4-Legged
Humanoid (new)
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
First Things FirstUT Austin VillaLooking for Research
RoboCup
“By the year 2050, develop a team of fully autonomous humanoidrobots that can win against the human world soccer championteam.”
Leagues:
Simulation
Small Size
Middle Size
4-Legged
Humanoid (new)
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
First Things FirstUT Austin VillaLooking for Research
A Member of UT Austin Villa
My Contributions
Team coordination
Communication
Other Parts
Vision
Locomotion
Localization
Behavior
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
First Things FirstUT Austin VillaLooking for Research
Looking for Research
Lost enthusiasm before finding a compelling research topic inthe robotic soccer domain
Things I found interesting about Robot Soccer
Autonomous agentsMultiagent systems (MAS)Machine learning
Entered a period of “searching” (these seem to be common ingrad school)
Eventually...
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
One Late Night In Austin...
Stopped at a red light
Driving can be fun, but usually is a chore
What about those cars in sci-fi movies? (“Timecop”,“Minority Report”)
What are the implications of having fully autonomous vehicleson the road?
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Research Aims
Driving could be...
Safer
1.2 million deaths (WHO 1998)38.8 million injuries (WHO 1998)
Easier
Age limitsDisabilitiesOther impairments
More efficient
Time: 46 hoursFuel: 5.6 billion gallonsMoney: $63 billion
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Computers as Drivers
More accurately sense their surroundings
Much more precisely control a vehicle
No distraction, road rage, drowsiness, drunkenness, aggression
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Required Technology
Existing
Intelligent cruise control
GPS-based route planning
Reliable wireless communication
Under Development
Autonomous steering (Pomerleau, 1995)
Robust lane following (Watanabe, 2005)
Vehicle/pedestrian tracking/classification (Wender,2005)
High-accuracy digital maps (Weiss, 2005)
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Required Technology
Existing
Intelligent cruise control
GPS-based route planning
Reliable wireless communication
Under Development
Autonomous steering (Pomerleau, 1995)
Robust lane following (Watanabe, 2005)
Vehicle/pedestrian tracking/classification (Wender,2005)
High-accuracy digital maps (Weiss, 2005)
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Intersections
Dangerous!
1/3 of all accidents1/4 of all fatal accidents
Responsible in large part forwaste
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Intersection Control Today
Traffic lights Stop signs Traffic circles
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
A Giant Multiagent System
Automobile traffic is already a huge multiagent system.
Agents — Human DriversMechanism — Traffic Signals, Stop Signs
Protocol — Traffic Laws
Question
New agents - should we get a new mechanism and protocol?
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
A Giant Multiagent System
Automobile traffic is already a huge multiagent system.
Agents — Human DriversMechanism — Traffic Signals, Stop Signs
Protocol — Traffic Laws
Question
New agents - should we get a new mechanism and protocol?
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Desiderata
Vehicles are treated as individual agents
Agents communicate only necessary information
Sensor information that can be obtained with currenttechnology
Communication failure doesn’t violate safety properties
A simple communication protocol
No deadlocks or starvation
Incrementally deployable
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Desiderata
Vehicles are treated as individual agents
Agents communicate only necessary information
Sensor information that can be obtained with currenttechnology
Communication failure doesn’t violate safety properties
A simple communication protocol
No deadlocks or starvation
Incrementally deployable
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Desiderata
Vehicles are treated as individual agents
Agents communicate only necessary information
Sensor information that can be obtained with currenttechnology
Communication failure doesn’t violate safety properties
A simple communication protocol
No deadlocks or starvation
Incrementally deployable
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Desiderata
Vehicles are treated as individual agents
Agents communicate only necessary information
Sensor information that can be obtained with currenttechnology
Communication failure doesn’t violate safety properties
A simple communication protocol
No deadlocks or starvation
Incrementally deployable
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Desiderata
Vehicles are treated as individual agents
Agents communicate only necessary information
Sensor information that can be obtained with currenttechnology
Communication failure doesn’t violate safety properties
A simple communication protocol
No deadlocks or starvation
Incrementally deployable
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Desiderata
Vehicles are treated as individual agents
Agents communicate only necessary information
Sensor information that can be obtained with currenttechnology
Communication failure doesn’t violate safety properties
A simple communication protocol
No deadlocks or starvation
Incrementally deployable
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Desiderata
Vehicles are treated as individual agents
Agents communicate only necessary information
Sensor information that can be obtained with currenttechnology
Communication failure doesn’t violate safety properties
A simple communication protocol
No deadlocks or starvation
Incrementally deployable
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
The Reservation Idea
Driver agents “call ahead” to reserve a region of space-time
Intersection manager approves or denies based on anintersection control policy
Vehicles may not enter the intersection without a reservation
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Intersection Manager
Intersection divided into an n× n grid of reservation tiles (n isthe granularity)
On a request, intersection manager simulates the journey ofthe vehicle through the intersection
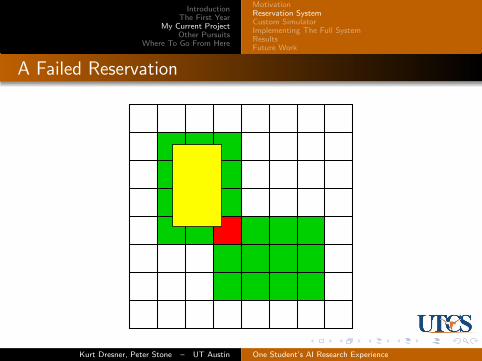
If no tiles occupied by the vehicle are already reserved, areservation is granted, otherwise the request is rejected
First come, first served
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Intersection Manager
Intersection divided into an n× n grid of reservation tiles (n isthe granularity)
On a request, intersection manager simulates the journey ofthe vehicle through the intersection
If no tiles occupied by the vehicle are already reserved, areservation is granted, otherwise the request is rejected
First come, first served
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Intersection Manager
Intersection divided into an n× n grid of reservation tiles (n isthe granularity)
On a request, intersection manager simulates the journey ofthe vehicle through the intersection
If no tiles occupied by the vehicle are already reserved, areservation is granted, otherwise the request is rejected
First come, first served
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Intersection Manager
Intersection divided into an n× n grid of reservation tiles (n isthe granularity)
On a request, intersection manager simulates the journey ofthe vehicle through the intersection
If no tiles occupied by the vehicle are already reserved, areservation is granted, otherwise the request is rejected
First come, first served
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
A Successful Reservation
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
A Failed Reservation
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Driver Agent
Attempt to make a reservation
If rejected, slow down
Try to keep reservation
If can’t keep reservation, cancel
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Custom Simulator
To test our idea, we created a custom simulator.
Simple physical model of vehicles
Adjustable time-step (used 150
sec)
Amount of traffic controlled through vehicle spawningprobability
Proof of concept:
No turningNo acceleration in intersection
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Implementing The Full System
Added in essential features:
Turning
Acceleration in the intersection
Disallowing causes deadlocks and starvationLess efficient use of space-time
Protocol
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Implementing The Full System
Added in essential features:
Turning
Acceleration in the intersection
Disallowing causes deadlocks and starvationLess efficient use of space-time
Protocol
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Implementing The Full System
Added in essential features:
Turning
Acceleration in the intersection
Disallowing causes deadlocks and starvationLess efficient use of space-time
Protocol
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Protocol
Standardized set of messages, rules
Knowledge of internals not required
Different manufacturers can implement internals differently aslong as they adhere to the protocolNew versions of software don’t require updates all around
Emulate other control policies
Stop sign (video)Traffic light
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Allowing Human Drivers and Pedestrians
Protocol subsumes current model of traffic control
Incorporating human drivers/pedestrians = detecting them.
A Human Approaches...
Switch from the current reservation policy to a traffic light orother human-usable policy
Allow the human driver or pedestrian to cross the intersectionunder this policy (i.e. when the light is green)
Return to a more efficient “computers only” policy
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Allowing Human Drivers and Pedestrians
Protocol subsumes current model of traffic control
Incorporating human drivers/pedestrians = detecting them.
A Human Approaches...
Switch from the current reservation policy to a traffic light orother human-usable policy
Allow the human driver or pedestrian to cross the intersectionunder this policy (i.e. when the light is green)
Return to a more efficient “computers only” policy
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Allowing Human Drivers and Pedestrians
Protocol subsumes current model of traffic control
Incorporating human drivers/pedestrians = detecting them.
A Human Approaches...
Switch from the current reservation policy to a traffic light orother human-usable policy
Allow the human driver or pedestrian to cross the intersectionunder this policy (i.e. when the light is green)
Return to a more efficient “computers only” policy
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Allowing Human Drivers and Pedestrians
Protocol subsumes current model of traffic control
Incorporating human drivers/pedestrians = detecting them.
A Human Approaches...
Switch from the current reservation policy to a traffic light orother human-usable policy
Allow the human driver or pedestrian to cross the intersectionunder this policy (i.e. when the light is green)
Return to a more efficient “computers only” policy
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Allowing Human Drivers and Pedestrians
Protocol subsumes current model of traffic control
Incorporating human drivers/pedestrians = detecting them.
A Human Approaches...
Switch from the current reservation policy to a traffic light orother human-usable policy
Allow the human driver or pedestrian to cross the intersectionunder this policy (i.e. when the light is green)
Return to a more efficient “computers only” policy
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
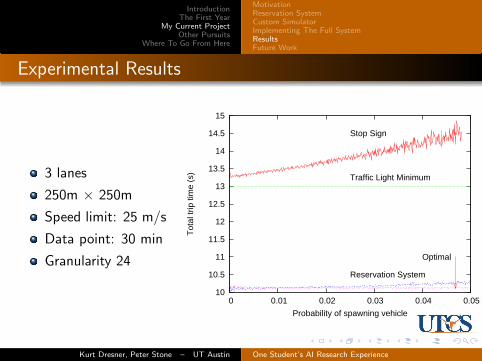
Experimental Results
3 lanes
250m × 250m
Speed limit: 25 m/s
Data point: 30 min
Granularity 24
10
10.5
11
11.5
12
12.5
13
13.5
14
14.5
15
0 0.01 0.02 0.03 0.04 0.05
Tot
al tr
ip ti
me
(s)
Probability of spawning vehicle
Stop Sign
Traffic Light Minimum
Reservation System
Optimal
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Future Work
Lane-changing
Multiple intersections
Vehicle cooperation/platooning
Multiagent learning
Intersection as a market
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
MotivationReservation SystemCustom SimulatorImplementing The Full SystemResultsFuture Work
Research Summary
Intersections can be blamed for many traffic woes
Autonomous vehicles suggest an overhaul of currentmechanism for controlling intersections
Created an intersection control mechanism using aMAS-based approach
Outperforms traffic light, stop sign, nearly optimal
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
GamesGeneral Game PlayingStuff We’ve Done
Games
Always liked playing/analyzing games
Another domain that incorporates my research interests
Many programs to play games
PokiDeep BlueTD-GammonSamuel’s Checkers
Lots of research on specific games (Alberta)
But these only play one game...
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
GamesGeneral Game PlayingStuff We’ve Done
General Game Playing
Agent receives a game description and must play the game
First-order logicWarm-up timePerfect information
Very different games - Connect 4, Othello, Chess, ChineseCheckers, Go, Euchre, 8 Puzzle, Nim, Tic Tac Toe, Mazes
Part of “Transfer Learning” work
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
GamesGeneral Game PlayingStuff We’ve Done
Stuff We’ve Done
Implemented a player and server
Created some games
Competed in the first annual competition (at AAAI)
Recognize features of games
Board positions, coordinatesPiecesSuccessor relationships“Step” variables
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience

IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
Parts Of A ThesisMy Progress Towards The PhD
Parts Of A Thesis
New algorithm/idea
Application of the idea in several domains
Experimentation
Writing
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience
IntroductionThe First Year
My Current ProjectOther Pursuits
Where To Go From Here
Parts Of A ThesisMy Progress Towards The PhD
My Progress Towards The PhD
1 Completed courses
2 Publications in selective conferences
3 Working on a journal article
4 Need to do a thesis proposal
5 Then to write the thesis and defend it
Kurt Dresner, Peter Stone – UT Austin One Student’s AI Research Experience