Rigid Body Dynamics - Indian Institute of Technology Guwahati · Angular momentum of a rotating...
21
Rigid Body Dynamics
Transcript of Rigid Body Dynamics - Indian Institute of Technology Guwahati · Angular momentum of a rotating...

Rigid Body Dynamics


Angular momentum of a rotating rigid body
O
rj
yz
x
Y
Z
X
XYZ: Fixed frame, xyz: Body frame
Consider a rigid body composed of N particles with
masses m1, m2, . . . , mj, . . . , mN. One of the points O of
the body is fixed and the body is rotating about an
arbitrary axis passing through the fixed point with an
angular velocity .
Take XYZ and xyz are the fixed and body frames
respectively with common origin at O. Then, the
coordinates of the jth point mass are same in the body
and fixed frames. Let us tale it as rj.
The velocity vj of the jth particle in the fixed frame is
fix rot
j j
j j j
dr drv r r
dt dt
rot
0, in a rigid body.jdr
dt



Let us compute one component of L, say Lx. Temporarily dropping the subscript j,
Hence,
Let us introduce the following symbols:
Ixx is the moment of inertia of the body about the x-axis of the body frame and Ixy andIxz are called products of inertia. The products of inertia are symmetrical; for example,
Calculation details


All the three components of angular momentum are given by:
For fixed axis rotation about the z-direction, , Lz reduces to
However, angular velocity in the z-direction can produce angular momentum aboutany of the three coordinate axes. For example, if , then Lx = Ixz and Ly = Iyz.
In fact, the angular momentum about one axis depends on the angular velocity aboutall three axes.
Both L and are ordinary vectors, and L is proportional to in the sense thatdoubling the components of doubles the components of L.
However, L does not necessarily point in the same direction as .
Details



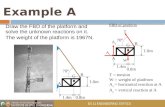
An example: Rotating Skew Rod Consider a simple rigid body consisting of two particles ofmass m separated by a massless rod of length 2l. Themidpoint of the rod is attached to a vertical axis whichrotates at angular speed . The rod is skewed at angle , asshown in the sketch. The problem is to find the angularmomentum of the system.
and L are not parallel.
Either
Or

Kinetic energy
The sum in the last term is the angular momentum L. Therefore,

Summary so far….
xx xy xz
yx yy yz
zx zy zz
I I I
I I I I
I I I
The nine components of MI can be tabulated In a 3 X 3 array:
is called the moment of inertia tensor.I
Ixx, Iyy, Izz are the MI about the x,y and z-axis of the body frame respectively. Off-diagonal terms are the product of inertia.
Since Iyx = Ixy , Izx = Ixz, and Iyz = Izy , out of the nine components, only six at most are different and the matrix is symmetric.
The angular momentum and the kinetic energy can be expressed as
1 1and
2 2L I T L I

Rotation of a square plate
Consider rotation of a square plate of side a and mass M about an axis in the planeof the plate and making an angle with the x-axis. What is the angular moment Labout the origin?
x
z
y
a
Consider a body fixed coordinate system (x,y,z) as shown in the figure.
cos
, with sin
0
L I
In order to estimate the moment of inertia tensor, oneneeds to calculate the moments of inertia about x, y, andz-axis and the products of inertia.
2 4 2 2
0 0
4 2
0 0
1 1 2,
3 3 3
1 1, 0
4 4
a a
xx yy zz xx yy
x y
a a
xy yx xz zx yz zy
x y
I y dxdy a Ma I I I I Ma
I xydxdy a Ma I I I I I

2
2 2
2 2 2
2
1 1cos sin
3 43 4 0 cos
1 14 3 0 sin cos sin
4 30 0 2 3 0
0
Ma
Ma Ma
L Ma Ma Ma
Ma
2 2
For 45 ,
21 1
, ,0 and 212 2 12 2
0
For =45 , they are parallel to each other.
L Ma Ma
x
y
L

• For a rotation around a principal axis, a vanishing torque
means that if the object is pivoted at the origin and if
origin is the only place where any force is applied
(implying that there is zero torque about it), then the object
can undergo a rotation with constant angular velocity, ω. If
you try it with a non-principal axis, it won’t work.

Principal axes and Moment of InertiaIf the symmetry axes of a uniform symmetric body coincide with the coordinate axes,the products of inertia are zero. In this case the tensor of inertia takes a simplediagonal form:
For a body of any shape and mass distribution, it is always possible to find a set ofthree orthogonal axes such that the products of inertia vanish. Such axes are calledprincipal axes. The tensor of inertia with respect to principal axes has a diagonal form.
Principal axes of different symmetric bodies:
In the principal axes system:
,
,
,
x xx x
y yy y
z zz z
L I
L I
L I

Principal axes: Diagonalization of Inertia tensor:
† †
,
, 1
d
R
L RL RI RIR R R R
I
Consider a rigid body with body axes x-y-z, Inertia tensor I is (in general) not diagonal.But it can be made diagonal by
Rotate x-y-z by R to a new body axes x’-y’-z’.
†
dI RIR
One can choose a set of body axes that make the inertia tensor diagonal. These bodyaxes are the Principal Axes.
How do one can find them?
Consider unit vectors e1, e2, e3 along principal axes : ˆ ˆ , 1,2,3i i iIe e i
1
2
3
0 0
0 0
0 0
d
I
I I
I
Express I in any body coordinates, and solve eigenvalue equation
1 2 30, , , ( is the identity matrix).I I I I I I Eigenvectors corresponding to each point the principal axes
One can often find the principal axes by just looking at the object.

Finding eigenvectors


Square lamina:
2 2
2 2
2
2 2
2 2
2
2 22 2 2
2 2 2
1 2 3
3 4 0
4 3 0
0 0 2 3
0
3 4 0
4 3 0 0
0 0 2 3
2 3 3 4 0
7 2, ,
12 12 3
Ma Ma
I Ma Ma
Ma
I I
Ma Ma
Ma Ma
Ma
Ma Ma Ma
Ma Ma Ma
x
y
z
Mass M and side a.