Rights / License: Research Collection In Copyright - …41471/... · formungen im Innern des...
169
Research Collection Working Paper Berechnung von Platten und Rippenplatten nach der Methode der endlichen Elemente Author(s): Alberti, Giorgio F. Publication Date: 1971 Permanent Link: https://doi.org/10.3929/ethz-a-000747229 Rights / License: In Copyright - Non-Commercial Use Permitted This page was generated automatically upon download from the ETH Zurich Research Collection . For more information please consult the Terms of use . ETH Library
-
Upload
phungxuyen -
Category
Documents
-
view
216 -
download
0
Transcript of Rights / License: Research Collection In Copyright - …41471/... · formungen im Innern des...

Research Collection
Working Paper
Berechnung von Platten und Rippenplatten nach der Methodeder endlichen Elemente
Author(s): Alberti, Giorgio F.
Publication Date: 1971
Permanent Link: https://doi.org/10.3929/ethz-a-000747229
Rights / License: In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For moreinformation please consult the Terms of use.
ETH Library

Berechnung von Platten
und Rippenplatten nach
der Methode der endlichen
Elemente
Giorgio F. Alberti
Oktober 1971
Bericht Nr. 39
Birkhäuser Verlag Basel Institut für Baustatik ETH Zürich

Leer - Vide - Empty
Leer - Vide - Empty
Berechnung von Platten und Rippenplattennach der Methode der endlichen Elemente
von
Dr. sc. techn. Giorgio F. Alberti
Institut für Baustatik
Eidgenössische Technische Hochschule Zürich
Zürich
Oktober 1971
Leer - Vide - Empty

INHALTSVERZEICHNIS
Seite
1. Einleitung 8
2. Kinematische Methode der endlichen Elemente
für zweidimensionale Tragwerke 11
2.1 Lokale Steifigkeitsmatrix und Lastvektor
eines Elementes 13
2.2 Verwendete Elemente 20
2.3 Globale Steifigkeitsmatrix und globale
Belastungsmatrix 40
2.4 Lösung des Gleichungssystems und Berechnung
der Schnittkräfte 44
2.5 Verschiedene kompatible Plattenelemente 45
3. Generelle Uebersicht des Programmes 52
4. Begründung der Eingabe 56
4.1 Elementorientierte Eingabe 56
4.2 Bandförmige globale Steifigkeitsmatrix 57
4.3 Eingabeprbgramm 58
5. Globale Steifigkeitsmatrix 63
6. Lastfälle 66
7. Randbedingungen 69
8. Lösung des Gleichungssystems 72
8.1 Gauss'sches Eliminationsverfahren 72
8.2 Cholesky-Verfahren 74
9. Numerische Beispiele 77
9.1 Platte 77
9.2 Rippenplatte 79
9.3 Schiefe Plattenbrücke 81

Seite
Zusammenfassung 88
Summary 90
ResumS 92
Anhang I : Eingabebeschreibung des Programmes 134
Anhang II : Knotennumerierung und Vorzeichenkonvention 155
Nomenklatur 156
Literatur 159

VORWORT
Die Methode der finiten Elemente hat sich heute bei der
numerischen Berechnung von Problemen der Elastizitäts- und
der Plastizitätstheorie mit digitalen Rechenautomaten all¬
gemein durchgesetzt. Ihre Anwendbarkeit auf praktische
Ingenieurprobleme hängt in erster Linie von den zur Verfü¬
gung stehenden Computerprogrammen ab. Das in der vorliegenden
Arbeit entwickelte Programm "FEAPS" erlaubt die Berechnung
von allgemein begrenzten und allgemein gestützten elastischen
Platten mit und ohne Rippen. Das Institut für Baustatik
hofft, damit einen nützlichen Beitrag zur Berechnung solcher
Konstruktionen geleistet zu haben.
Die Arbeit wurde von Herrn G. Alberti als Doktordissertation
(Referent: Prof. Dr. B. Thürlimann, Korreferent: Dr. E.
Anderheggen) verfasst. Die theoretischen Grundlagen des
Verfahrens basieren zum Teil auf Arbeiten und Veröffent¬
lichungen von Herrn Dr. E. Anderheggen, der auch diese Arbeit
wissenschaftlich leitete.
Eidgenössische Technische Prof. Dr. Bruno ThürlimannHochschule - Zürich
Oktober 1971

1. EINLEITUNG
Die Berechnung von Verformungen und Schnittkräften von dünnen
Platten mit analytischen Methoden ist nur in Spezialfällen
möglich. Für allgemeine Plattensysteme werden Näherungsmetho¬
den verwendet, die meistens auf einer Diskretisation aufgebaut
sind. Die Methode der endlichen Elemente wurde für die Berech¬
nung von beliebigen zweidimensionalen, dünnen, linear-elasti¬
schen Platten und Rippenplatten verwendet. Diese wurde Ende
der fünfziger Jahre mit den Pionierarbeiten von Argyris [1,30],
Clough [2,28], Melosh [29] und Zienkiewicz [3] entwickelt.
Sie stützt sich auf die Unterteilung des Kontinuums in Teile
einfacher Geometrie. Dies erlaubt die stückweise Bildung von
anpassungsfähigen Ansatzfunktionen für die unbekannten Ver¬
formungen im Innern des Tragwerkes. Die Ansätze dienen zur
Approximation der inneren Formänderungsenergie der einzelnen
Elemente als quadratische Funktion der angenommenen Verfor¬
mungsparameter. Das elastische Potential (Formänderungsenergie)
der einzelnen Elemente wird zur Bestimmung von verallgemeiner¬
ten Spannungsdehnungsbeziehungen (Steifigkeitsmatrizen) im
lokalen elementbezogenen Koordinatensystem verwendet. Das
Potential der äusseren Kräfte kann auch durch Ansatzfunktionen
als lineare Funktion der diskreten Verformungsparameter be¬
rechnet werden. Die totale potentielle Energie des Tragwerkes
wird als Addition der, im globalen Koordinatensystem definier¬
ten, Formänderungsenergien der Elemente und der, im selben
Koordinatensystem abgeleiteten, potentiellen Energie der
äusseren Lasten bestimmt.
Die potentielle Energie eines im Gleichgewicht stehenden
elastischen Tragwerkes wird für den wirklichen Verformungs¬
zustand minimal. Die Anwendung des Minimumprinzips führt zu
einem linearen Gleichungssystem für die unbekannten Verfor¬
mungsparameter. Das entstandene Gleichungssystem kann mit
bekannten Algorithmen (z.B. Gauss'sches Eliminationsverfahren
oder Cholesky-Verfahren) gelöst werden. Die Spannungen werden
dann aus den Dehnungen bzw. aus den Verschiebungen bestimmt.
Ziel dieser Arbeit ist die Entwicklung eines Programmes für
die Berechnung von beliebig begrenzten und gelagerten Platten
und Rippenplatten nach der Methode der endlichen Elemente.
Das Programm hat eine leicht verständliche Eingabe und strebt
minimale Rechenzeiten an. Im Gegensatz zu den bis jetzt be¬
kannten Programmsystemen wurde eine elementorientierte Eingabe
gewählt. Die Elementanordnung basiert auf sich wiederholenden
Elementtypen fester Geometrie, die kolonnenweise angegeben
werden. Die Randbedingungen und die Belastungsgrössen werden
ebenfalls elementorientiert spezifiziert. Die Knotennumerierung
bei den Elementen und Verformungsparametern ist so gewählt,
dass schmale, bandförmige globale Steifigkeitsmatrizen ent¬
stehen. Diese Anordnung minimalisiert die Rechenzeit zur
Auflösung des Gleichungssystems.
Für die vorliegende Arbeit werden die folgenden Elemente
verwendet:
a) Dreieckige und viereckige Plattenelemente mit
18 bzw. 24 Verschiebungsparametern, basierend auf
einem Polynom 5. Grades als Verschiebungsansatz.
b) Dreieckige und viereckige Scheibenelemente mit
18 bzw. 24 Verschiebungsparametern, gestützt auf
einem Polynom 3. Grades als Verschiebungsansätze.
c) Exzentrische Balken (Rippen) mit polynomischen
Verschiebungsansätzen 5. Grades für die Verschiebung
senkrecht zur Plattenebene und 3. Grades für die
Verschiebung in Längsrichtung.
-10-
Im nächsten Kapitel wird eine Uebersicht über die mathe¬
matischen Grundlagen der Methode der endlichen Elemente
gegeben, und es werden gleichzeitig die verwendeten Elemente
beschrieben. Im folgenden dritten Kapitel wird das Programm
FEAPS in seinem Aufbau und in seiner möglichen Verwendung
betrachtet. Nach der Begründung der getroffenen Wahl einer
elementorientierten Eingabe und einer speziellen Element¬
unterteilung der zu berechnenden Tragwerke (Kap. 4), wird
die Aufstellung des linearen Gleichungssystems (Kap. 5, 6
und 7) beschrieben. Im achten Kapitel wird die Lösung des
Gleichungssystems besprochen. Das neunte Kapitel stellt
die untersuchten Platten und Rippenplatten zusammen.

-11-
KINEMATISCHE METHODE DER ENDLICHEN ELEMENTE
FUER ZWEIDIMENSIONALE FLAECHENTRAGWERKE
Die Theorie der dünnen Platten mit kleiner Durchbiegung aus
linear-elastischem Material (Theorie 1. Ordnung) stellt die
Grundlage für die folgenden Ausführungen dar.
Die Methode der endlichen Elemente stützt sich auf die Unter¬
teilung des Kontinuums in Elemente einfacher Geometrie (z.B.
Dreiecke oder Vierecke). Für jedes Element wird eine Anzahl
Verformungsparameter für eine bestimmte Knotenanordnung ge¬
wählt. Die Verformungsparameter stellen die, den Verschie¬
bungsansätzen opi(x,y) entsprechenden Amplituden im Innern
des Elementes dar. Der Verschiebungsansatz beschreibt den
Verformungszustand des Elementes in Funktion der Knoten¬
verformungsparameter. Er stellt als solcher eine Diskreti¬
sation des Verschiebungszustandes dar. Die für die Ver¬
schiebungsansätze verwendeten Funktionen sind meistens
Polynome in den kartesischen Koordinaten x und y oder in
"natürlichen" dimensionslosen Dreieck- oder Viereckkoordi¬
naten. Die letzteren basieren auf Abständen von den Seiten.
Felippa [20], Zienkiewicz [3] und Argyris [15] haben "natür¬
liche" dimensionslose Koordinaten systematisch angewendet.
Durch Integration innerhalb jedes Elementes werden das elasti¬
sche Potential U, das Potential der äussern Kräfte V, als
quadratische beziehungsweise lineare Funktion der Verformungs¬
parameter, und damit die lokale Steifigkeitsmatrix und der
lokale Lastvektor bestimmt. Die Steifigkeitsmatrix und der
Lastvektor des aus Elementen zusammengesetzten Tragwerkes
werden durch die Summe über alle Elemente der entsprechenden
Formänderungsenergien und der Potentiale der äussern Kräfte

-12-
berechnet. Die Anwendung des Minimumprinzips der poten¬
tiellen Energie liefert ein lineares Gleichungssystem für
die unbekannten Verformungsparameter. Die Spannungen folgen
aus den Dehnungen bzw. aus den Verschiebungen.
Bei der Annahme der Verformungsparameter und der Verformungs¬
ansätze müssen die folgenden Bedingungen erfüllt sein:
a) Kinematische Kontinuitäts- und Randbedingungen entlang
den Rändern der Elemente dürfen nicht verletzt sein.
Die angenommenen Ansatzfunktionen müssen dann entlang
den gemeinsamen Seiten von zwei benachbarten Elementen
Verformungen aufweisen, die nur von den Parametern dieser
Seiten abhängig sind. Für die Verschiebungen der Scheiben¬
elemente in der Ebene des Elementes entstehen in der Regel
keine Schwierigkeiten, weil einfache Kontinuität notwendig
ist. Für die Plattenelemente sind nicht nur die gleiche
Verschiebung senkrecht zur Plattenmittelebene der an¬
grenzenden Seiten zweier Elemente notwendig, sondern
auch gleiche Werte für die Verdrehungen normal zu den
gemeinsamen Elementseiten, Eine gewisse Anzahl externer
Verformungsparameter muss deswegen auf den Rändern der
Elemente gewählt werden. Interne Verformungsparameter
werden in gewissen Fällen zusätzlich, für eine bessere
Erfassung des Gleichgewichtes, eingeführt.
b) Starrkörperverschiebungen dürfen keine Dehnung (und des¬
wegen keine Spannung) verursachen, d.h.: wenn die Knoten¬
verformungen einer Starrkörperverschiebung entsprechen,
muss die Verformungsenergie des Elementes identisch Null
sein.

-13-
c) Zustände konstanter Dehnung müssen möglich sein. Beim
Verfeinern der Elementmaschen nähern sich die Element¬
verformungen Zuständen konstanter Dehnung. Deswegen müssen
diese Zustände in den Ansatzfunktionen enthalten sein. In
diesem Falle, wenn die Verformungsparameter einen konstan¬
ten Dehnungszustand beschreiben, sollen die Dehnungen im
Innern des Elementes konstant sein.
d) Die Ansatzfunktionen sollten invariant bezüglich einer
Aenderung des globalen Koordinatensystems sein. Diese
Eigenschaft wird durch die Verwendung von natürlichen
Koordinaten automatisch erfüllt. Ansatzfunktionen in
Form von bis zu einem bestimmten Grad vollständigen
Polynomen erfüllen ebenfalls diese Bedingung.
2.1 Lokale Steifigkeitsmatrix und Lastvektor eines Elementes
Der lokale Verschiebungszustand |v(x,y)j eines Scheiben¬
oder Plattenelementes kann durch die folgende Beziehung
zwischen der Matrix pKx.yjJ, der angenommenen Ansatzfunk¬
tionen und dem Vektor |fe|der Verformungsparameter beschrieben
werden:
{v(x,y)} =[3>(x,y)]-{fe} d)
Für die Ansatzfunktionen werden meistens polynomische Funktionen
verwendet, welche am besten mit Hilfe von natürlichen, dimen¬
sionslosen Koordinaten (z.B. £ , £ ,£ für Dreieckkoordi¬
naten) formuliert werden.

-14-
Die Beziehungen zwischen den erwähnten Koordinaten und den
karthesischen x- und y-Koordinaten sind von Felippa [20] und
Ergatoudis [26] angegeben worden. Die Dehnungen können auch
in Funktion der angenommenen Ansatzfunktionen berechnet
werden:
(6(x,y)} = [A<J>(x,y)]-{fe} (2,
Die Matrix [A$(x,y)J entsteht aus der Matrix [$(x,y)Jdurch Anwendung der, aus der Theorie der Flächentragwerke
[6,7], bekannten Beziehungen zwischen Dehnungen und Verfor¬
mungen. Die folgende Gleichung gibt die linear-elastischen
Spannungsdehnungsbeziehungen an:
{a(x,y)} = [D]-{€(x,y)} (3)
Die Matrix [D] enthält die Elastizitätskonstanten des ange¬
nommenen Materials. Die lokale Elementsteifigkeitsmatrix [k]
stellt die Beziehung zwischen verallgemeinerten Kräften und
Knotenverformungen dar. Seine Definition folgt aus der Be¬
ziehung für das elastische Potential U:
F F

-15-
U ist die Formänderungsenergie des Elementes für einen vom
Vektor |fej definierten Verschiebungszustand.|e| und |o-jsind Vektoren der Dehnungen und der entsprechenden Spannungen.
Die lokale Steifigkeitsmatrix eines Elementes ist durch die
folgende Beziehung gegeben:
[k] = ff [&&]'¦ [ü]-[tä] ¦ dF es)
F
Für die Bestimmung des lokalen Belastungsvektors |p| in¬
folge allgemeiner äusserer Lasten |p (x , y )| verwendet man den
Ausdruck für das Potential V der äusseren Kräfte:
V = -JJ{v(x,y)}t-{p(x,y)}- dF C6)
Durch die Einsetzung der Beziehung (1) folgt:
V=-{'e},-//[*]'{p}dF=-{fe},{p}
Der lokale Lastvektor |p| ist:
{p} -/ZK' {p}dFF
Der Vektor |p| stellt die "konsistenten", für eine allgemeine
Belastung |p(x,y)| entstandenen, den Verformungsparametern
entsprechenden Knotenbelastungen dar. Analoge Lastvektoren
können für Anfangsdehnungen (z.B. infolge Schwinden) definiert
werden.

-16-
Die Gleichungen (1) bis (8) dienen zur Berechnung des elasti¬
schen Potentials und des Potentials der äusseren Kräfte eines
Elementes mit Hilfe von Verschiebungsansätzen. Analog kann
man auch das elastische Potential mit Dehnungsansätzen berech¬
nen. Dieses Vorgehen hat den grossen Vorteil, dass man eine
geometrieunabhängige Integration, bis auf einige Materialkon¬
stanten und bis auf die Plattendicke, der Elementsteifigkeits¬
matrix [k£ ] für die gewählte Anordnung der diskreten Deh¬
nungsparameter |e| durchführen kann.
Diese Integration kann deswegen einmal für alle Elemente er¬
folgen. Die weiteren Vorteile bestehen im niedrigeren Grad
der Interpolationspolynome für die Dehnungsparameter (im
Falle der Scheibe ist der Grad um Eins und im Falle der
Platte um Zwei kleiner als der Grad der Polynome für die
Verschiebungsansätze) und im Fehlen der Bedingung der kine¬
matischen Zulässigkeit für den Vektor |€|der allgemeinen
Dehnungen. Die Gleichung (2) kann analog für die diskreten
Dehnungsparameter geschrieben werden:
{«}*[¦*]•{«} (9)
Aehnlicherweise zur Gleichung (4) kann man die Steifigkeits¬
matrix für die Dehnungsparameter definieren. Das elastische
Potential U des Elementes, mit Berücksichtigung der Gleichung
(9) wird:
U =1//{,}'H •dF=i-{c-}'//[*€] • [D]{*e] ¦ dF{*}F F
=-H*}*N-{*}
-17-
Daraus ergibt sich die lokale Steifigkeitsmatrix des Elementes
für die gewählten diskreten Dehnungsparameter zu:
[K] = //[*<]' [D] ¦[«*]¦ dF ,..)
Die Steifigkeitsmatrix für die benützten Verformungsparameter
(fe| im lokalen Koordinatensystem entsteht aus [k€ ] durch
eine kongruente Transformation. Die Transformationsmatrix [T]
der Verschiebungsparameter in die Dehnungsparameter ist mei¬
stens relativ leicht aufzustellen:
{*}=[T].{r}
Aus der Definition des elastischen Potentials U folgt:
^W'N'W4{1'[1'N[1M-
-m^-w-k}(13)
Die kongruente Transformation der Steifigkeitsmatrix von den
Dehnungsparametem zur Steifigkeitsmatrix der Verformungs¬
parameter ergibt sich zu:
[K] =[T]'.[K«].[T]

-18-
Der Vektor yr> der allgemeinen Spannungen wird mit den
Gleichungen (3), (9), (12) definiert:
[«r] =[D]-H=[DH4W =»]'(1=i1 "»
Die Matrix [s] ist die Spannungsmatrix:
[.]=[D]-K]-[T] (16)
Die "Kondensation" der internen Verformungsparameter eines
Elementes wird anschliessend beschrieben. Sie wurde von
Felippa [20] ausführlich behandelt. Das Minimumprinzip der
potentiellen Energie kann für die inneren Verformungspara¬
meter |fj| eines Elementes angewendet werden, bevor die
globale Steifigkeitsmatrix zusammengesetzt wird. Das ist
möglich, weil die internen Verformungsparameter keinen Ein-
fluss auf die nebenliegenden Elemente haben. Die potentielle
Energie eines belasteten Elementes ist:
7T=U+V=
kjj i kje
I
kei | kee
• «
'fi", _•
V t
. . .
Pi
A fe Pe^ J
-19-
{fef sind die "externen", den Randverformungen entsprechen¬
den Parameter, {pe} die dazugehörigen Belastungen und Ipjjder Vektor der "internen" Belastungen, entsprechend den "in¬
ternen" Verformungsparametern if\\ . Die symmetrische Stei¬
figkeitsmatrix des Elementes wurde in vier Untermatrizen,
entsprechend den "internen" und "externen" Verformungspara¬
metern, getrennt. Die Anwendung des Minimumprinzips der
potentiellen Energie auf die "internen" Verformungsparameter
gibt:
|-ri]'WMl}-W = 0
{fi} kann jetzt in der Beziehung für TT eingesetzt werden
und man bekommt eine Beziehung der Form:
'¦i{f.}'HW-W'{p}
worin die "kondensierte" Steifigkeitsmatrix
[k] = [kee] - [kei]-[ku]~1- [kie]
und der "kondensierte" Lastvektor
{P}= {Pe}- [kei]'[kii]"1{Pi}

-20-
die angegebene reduzierte Form erhalten. Die "internen" Ver¬
formungsparameter werden eliminiert und deswegen wird das
globale Gleichungssystem reduziert ohne Aenderung des Trag¬
verhaltens des idealisierten Systems.
2.2 Verwendete Elemente
2.2.1 Plattenelemente DRPL21, DRPL18, VKPL24
Da die Plattenstärke klein ist gegenüber den anderen Ab¬
messungen, kann man annehmen, dass die Punkte auf einer
Normalen zur Mittelebene der Platte auch nach der Verformung
auf einer Normalen zur deformierten Mittelfläche liegen.
Weil die Durchbiegungen klein sind, kann man die Verformung
der Mittelebene der Platte vernachlässigen. Diese von Kirch¬
hoff eingeführten Hypothesen haben zur Folge, dass die Ver¬
formung der Platte durch die vertikale Durchbiegung der
Mittelebene vollständig beschrieben ist. Es folgt nun die
mathematische Formulierung dieser Bedingungen für die Ver¬
schiebung w senkrecht zur Mittelebene der Platte und die zwei
Verschiebungen u und v in der Ebene der Platte:
w(x,y,z )= w(x,y)
v(x,y,z) = -z--|^-=-z-w,y d7)
uU,y,z) =-z-ff =
-z-w,x
Die Dehnungen der Platte ergeben sich mit Berücksichtigung
der Gleichungen (17) wie folgt:
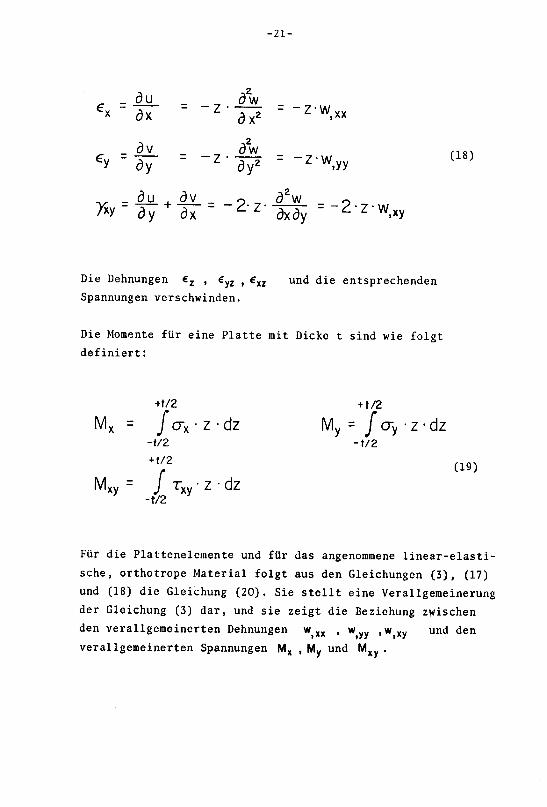
-21-
= -z- WXX
- -z •w>yy
a2w
<3xr3y= ¦-2- Z'•w
i.xy
-dii
_dw
x
"
öx öx2
jr3v__
dwey
"
dy" Z
'
dy2
W dy dx<LZ
Die Dehnungen €z , £yz , €xz und die entsprechenden
Spannungen verschwinden.
Die Momente für eine Platte mit Dicke t sind wie folgt
definiert:
+t/2 +t/2
Mx = /crx-z-dz My = fay z-dz-t/2+t/2
Mxy = / rxy•
z• dz
(18)
-t/2
-t/2+t/2
(19)
Für die Plattenelemente und für das angenommene linear-elasti¬
sche, orthotrope Material folgt aus den Gleichungen (3), (17)
und (18) die Gleichung (20). Sie stellt eine Verallgemeinerung
der Gleichung (3) dar, und sie zeigt die Beziehung zwischen
den verallgemeinerten Dehnungen wxx ,
wyy ,
wxy
und den
verallgemeinerten Spannungen Mx , My und Mxy .

-22-
M„
M,
Mxy
Pl1 P12 °
P12 P22 0
0 0 P33
w xx
W.yy
w,xy
(20)
Für isotropes Material und konstante Plattendicke t ergeben
sich die folgenden Koeffizienten für die obere Gleichung:
P11=
R22E- t;
12 (1-zr2)
p33 Ml-irVpu
P12= ^"Pn
(21)
worin V die Poisson'sche Zahl und E der Elastizitätsmodul
sind. Für Plattenelemente berechnet man die Formänderungs-
energie wie folgt:
U =\ ff (wiXX-Mx+ w,yy-My + 2-w,Xy-Mxy)-dF ^
Die Momente sind durch die Beziehung (20), (21) von den
Krümmungen abhängig.
Das verwendete dreieckige Plattenelement DRPL21 (21 Verfor¬
mungsparameter) basiert auf der Annahme eines vollständigen

-23-
Polynoms 5. Grades als Durchbiegungsfunktion. Dieses Element
wurde von mehreren Autoren beschrieben und programmiert [34,
32, 35, 36, 20, 23, 58]. Bell [35] hat dieses Element ohne
Anwendung von natürlichen Koordinaten programmiert. Die Rechen¬
zeit (CP-Zeit) für die Berechnung der Steifigkeitsmatrix eines
Dreieckelementes ist deswegen gross. Anderheggen [32] hat
durch Anwendung von natürlichen, dimensionslosen Dreieck¬
koordinaten die Rechenzeit gegenüber Bell stark reduziert.
Sein Algorithmus benötigt keine Matrizeninversion. Die Ma¬
trizen und Vektoren, die mit diesen Koordinaten hergeleitet
werden, sind von Geometrie und Materialeigenschaften weit¬
gehend unabhängig, so dass viele Berechnungen nur einmal für
alle Elemente gemacht werden müssen. Die Tabelle 2.2.1.1
stellt diese Angaben zusammen.
Programm -
SpeicherlängeAnlage Rechenzeit (Sek.)
Anderheggen [32] 1100 Wörter
(1 Wort = 60bits)
CDC-6500 0.17
(inkl. Lastvektoren)
Bell [35] UNIVAC-1107 2.70
Butlin [58] 64000 bytes
(1 byte = 8 bits)
IBM 360-75 0.12
Tabelle 2.2.1.1 : Berechnung der Steifigkeitsmatrix des Elementes DRPL21
Anderheggen [32] entwickelte gleichzeitig Viereckelemente
VKPL24, bestehend aus vier Dreiecken DRPL21 mit "konden¬
sierten" inneren Verformungsparametern und Elimination der
vier äusseren Verdrehungen in Seitenmitte.

-24-
Die Verträglichkeit der Verformungen muss in den Berührungs¬
flächen und im Innern des Elementes gewährleistet sein. Der
angenommene Verschiebungsansatz für w im Innern des Elementes
muss kontinuierlich und kontinuierlich differenzierbar sein.
Die Hauptschwierigkeit bei den Plattenelementen liegt in der
kinematischen Verträglichkeit der Durchbiegung und ihrer
ersten Ableitung normal zu den Rändern von benachbarten end¬
lichen Elementen. Für die Ränder verlangt man kontinuierliche
Durchbiegung w sowie auch kontinuierliche Verschiebung u und
v an zwei angrenzenden Elementen. Die erste Bedingung ist bei
den Elementen DRPL21 und DRPL18 erfüllt. Die Durchbiegung w
entlang einer Seite ist durch die Verschiebung w, die Ver¬
drehung w und die Krümmung w (der Index p steht für>P »PP
parallel zur Seite) an beiden Enden der Seite als Polynom
5. Grades vollständig bestimmt. Die Verschiebungen u, v (in
x- und y-Richtung) der Punkte ausserhalb der Mittelfläche
der Platte und in den gemeinsamen Randflächen von zwei Ele¬
menten müssen für beide Elemente gleich sein. Die Kirchhoff'
sehen Annahmen (17) zeigen eine direkte Abhängigkeit der
Verschiebungen u , v von den Verdrehungen W)X ,w„ . Für
die kinematische Kompatibilität der Plattenränder verlangt
man deswegen gleiche Normalverdrehung der Seite für die an¬
grenzenden Elemente. Die Normalverdrehung wn muss durch die
Werte der Seitenverformungsparameter vollständig bestimmt
sein. Für das DRPL21-Element hat man für die Normalverdrehun¬
gen entlang einer Seite ein Polynom 4. Grades. Für ihre ein¬
deutige Bestimmung braucht man fünf Parameter. Weil die Ver¬
drehung v»7n und die Krümmung wjnp an beiden Seitenenden
bekannt sind, fehlt ein zusätzlicher Verformungsparameter.
Als fünfter Parameter wird die Verdrehung normal zur Seiten¬
mitte gewählt. Die drei Verdrehungen in Seitenmitte werden
beim Element DRPL18 eliminiert, indem verlangt wird, dass die
Ableitung der Durchbiegungsfunktion in Normalrichtung entlang
-25-
den drei Seiten eine Funktion 3. Grades (und nicht 4. Grades
wie beim Element DRRL21) ist. Der Vektor der Verschiebungs¬
parameter reduziert sich von 21 auf 18 Parameter.
Für die Vollständigkeit des Verschiebungsansatzes wird ver¬
langt, dass alle Starrkörperverschiebungen und Zustände kon¬
stanter Dehnung im Verschiebungsansatz enthalten sind. Für
die verwendeten Plattenelemente DRPL18 bedeutet dies, dass
im Polynom der Durchbiegungsfunktion w(x,y) die Terme
1,
x, y (Starrkörperverschiebungen) und xy ,
x2, y2
(Zustände konstanter Dehnung £x ,ey , yiXy bzw. konstanter
Krümmungen aus den Gleichungen (18)) enthalten sind.
Die Entwicklung der Steifigkeitsmatrix und der konsistenten
Lastmatrix des von Anderheggen [32] programmierten Platten¬
elementes DRPL21 werden im folgenden Teil kurz zusammenge-
fasst. Im Bilde 2.3 sind die verschiedenen benötigten Ko¬
ordinatensysteme zusammengestellt. Die angenommenen Knoten¬
anordnungen und zugehörigen Numerierungen sowie die ent¬
sprechenden Interpolationspolynome sind der Veröffentlichung
von Felippa [20] entnommen worden. Der Ansatz für die Durch¬
biegungsfunktion ist ein vollständiges Polynom 5. Grades in
x und y mit 21 Termen. Die Krümmungen sind nach der Platten¬
theorie die zweiten Ableitungen der Durchbiegung. Sie werden
als voneinander unabhängige Feldvariablen betrachtet. Die
Interpolationspolynome für die Krümmungen im kartesischen
Koordinatensystem wxx , wyy ,wxy sind Polynome 3. Grades
mit je 10 Termen. Für die unabhängig voneinander angenommenen
kartesischen Krümmungsfeldvariablen sind die kubischen Inter¬
polationsfunktionen in natürlichen Dreieckkoordinaten für
die 10 Knoten des Bildes 2.3.C bekannt (Felippa [20]). Mit
diesen Interpolationsfunktionen werden die Krümmungsfeider
als Funktion der diskreten Krümmungsparameter der gewählten

-26-
Knotenanordnung bestimmt. Man kann auf Grund dieser Annahmen
die Steifigkeitsmatrix [kvl für die diskreten Krümmungspara¬
meter ableiten. Sie ist bis auf einige Faktoren unabhängig
von der Geometrie und den Materialeigenschaften des Elementes.
Eine kongruente Transformation der Steifigkeitsmatrix [kxjliefert dann die für die Verformungsparameter des Dreieckes
DRPL21 gebrauchte Steifigkeitsmatrix [k]. Definiert werden
zuerst die benötigten Vektoren (s. Bild 2.3):
Krümmungsvektoren im kartesischen Koordinatensystem:.
[Xk}f1x30 = <Wa,xx-"WjiXX i WQiyy---Wjiyy ! WQ)Xy--WjjXy>
Krümmungsvektoren im schiefen Koordinatensystem:
Us}\x30
= <wa,occx--wj,acxi %,ßß-^Ußß ! ™apß"
wj^ >
Verschiebungsvektoren im kartesischen und schiefen
Koordinatensystem:
{rk}f1x21 = <W1 W1,x W1,y W1,xx W1,yy W1,xy ! W2''
^,xy !
W3-W3,xy i-W12,n "W23,n +W31,n >
{rs} 1x21= <W1 W1,cx w1,/3 w1,cxoc w1,flS w1A/9 i W2
""
w2pc/3!W3" ^3,003 i (W12,cx +
«12.0 > W23,cx W31,/3 >
{^1x21 = <(W12,oc- W12,/3) W23>/S W31i0( >

-27-
Zu den sechs diskreten Verschiebungsvariablen der drei Ecken
kommen noch drei Rotationen in Normalrichtung in der Mitte
der Seiten des Dreieckes. Die Vorzeichenkonvention der Ver¬
formungsparameter in Seitenmitte ist die folgende: Eine
positive Rotation +w erzeugt positive Durchbiegungen im
Innern des Elementes.
Aus der Definition der elastischen Formänderungsarbeit U
erhält man eine den Krümmungsparametern entsprechende Steifig¬
keitsmatrix. Nach Gleichung (22) gilt:
u = T-IT(w,xx-Mx+wyy-My + 2-wxy-lv1xy)'dF =
= "2'Wt1x30' |>]30x30 'W
(23)
30x1
Die Interpolationsfunktionen 3. Grades in natürlichen, dimen¬
sionslosen Dreieckkoordinaten £i , C2'^3 nach der Knoten¬
anordnung des Bildes 2.3.C sind (Felippa [20, Seite 29]):
faX*i=^3£r1)(3£i-2)£^^
2=3 =2C ° C(24)
J10x1
9£iÖ3C-1)| 95,^(3^-1)1 9y3(3C2-1)i
9^3^-1)19£A(3fe 1)| 9^(3^-1)!
54&fefe>
Für die allgemeinen Krümmungsfeldvariablen kann man schreiben:

-28-
M=W,xx '44 0 0
Wyy= 0 44 0
w,xy 3x10 0 <«
W 30x1(25)
3x30
Die Momentkrümmungsbeziehungen (20) sind bekannt. Die
Gleichungen (20), (23) und die folgenden (24), (25) liefern
die Elementsteifigkeitsmatrix für die diskreten Krümmungs¬
parameter:
h)
Pn• M j Pi2* m
P12" W~jP22-Wo 0
0
~0
2-P33 M
F
30x30
(26)
F ist die Fläche des Elementes. Die Matrix I V' J10 x 10
ist eine numerische Matrix, deren Elemente den folgenden
Wert haben:
^ =T'/Ai'^-dF (27)
wobei:

-29-
/Trp-£q-/:r-dF= 2!P1q|r! -f (28)JJ M *2*3ar
2+D+a+r)!h
Die durch Integration abgeleitete Matrix [ty \ i-st von
Felippa [20, Seite 35] gegeben.
Die Steifigkeitsmatrix [k^l wird dann durch eine kongruente
Transformation auf die 21 Verformungsparameter des Dreieck¬
elementes DRPL21 zurückgeführt:
Mzi,2i= W-W-m (29)
Die Plattenelemente DRPL21, DRPL18, VKPL24 haben den Vorteil
einer einfachen Berechnung der Momente in den Ecken, da die
drei Krümmungen wxx , wyy , wxy als Verformungsparameter
der Ecken direkt vorhanden sind. Diese drei Verformungspara¬
meter haben aber auch den Nachteil, dass sie in den Ecken
kontinuierlich sind. Das führt zu Fehlern bei aufliegenden
und eingespannten Rändern an einspringenden Ecken und bei
diskontinuierlicher Matrix [D] der Spannungsdehnungsbeziehun-
gen, (s. Gleichung (3)).
2.2.2 Elastisch aufgelagertes, viereckiges Plattenelement
Mit diesem speziellen Element kann man Stützen und Fundament¬
platten auf einem elastisch senkbaren Boden (nach der Bettungs¬
ziffertheorie [8,39]) behandeln. Der Fall der Platte auf frei
drehbaren, elastisch senkbaren oder festen Stützen kann eben¬
falls untersucht werden. Anderheggen [32] gibt den ent-

-30-
sprechenden Algorithmus. Angenommen wird, dass die Stütze
einen gleichmässig verteilten Druck s auf das Element ausübt.
Analog zur früher beschriebenen "Kondensation" (s. Abschnitt
2.1) kann man eine erweiterte Form der potentiellen Energie
V* angeben:
»=TT
-
4-T -(F.ctf + Q ff UI-HF (3°)TT' -
TT
-
-J 'CS'(F*S)2+ sffvJ'ÖF
c ist die Federkonstante des Stützenelementes (Verschiebung
infolge Krafteinheit), und F ist seine Fläche. Die zwei
Summanden stellen die Formänderungsarbeit der Stütze und
die Arbeit des gleichmässigen Stützendruckes s für die
Plattendurchbiegung w dar. Durch die Nullsetzung der par¬
tiellen Ableitung nach s des Ausdruckes für 7T*folgt:
|f*=-cs-F2-s*//wdF=0 (31)
oder:
Cs-F-s = -jr-jfjf w-dF = 8
(F.s) ist die StUtzenkraft und 8 die durchschnittliche
Durchbiegung.
Anderheggen [32] zeigt die Herleitung von verallgemeinerten
kondensierten Matrizen (z.B. die Steifigkeitsmatrix) und
Vektoren, die die Federkonstante cg berücksichtigen. Für
cs unendlich gross bekommt man das normale Viereckelement
und für cg gleich Null ein unsenkbares, jedoch biegsames
StUtzenelement.
-31-
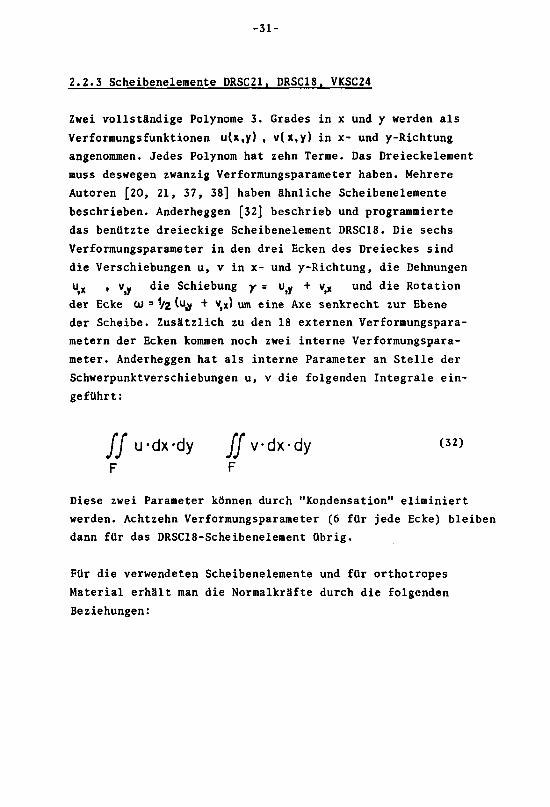
2.2.3 Scheibenelemente DRSC21, DRSC18, VKSC24
Zwei vollständige Polynome 3. Grades in x und y werden als
Verformungsfunktionen u(x,y) , v(x,y) in x- und y-Richtung
angenommen. Jedes Polynom hat zehn Terme. Das Dreieckelement
muss deswegen zwanzig Verformungsparameter haben. Mehrere
Autoren [20, 21, 37, 38] haben ähnliche Scheibenelemente
beschrieben. Anderheggen [32] beschrieb und programmierte
das benützte dreieckige Scheibenelement DRSC18. Die sechs
Verformungsparameter in den drei Ecken des Dreieckes sind
die Verschiebungen u, v in x- und y-Richtung, die Dehnungen
ux , Vy die Schiebung y= uy + v„ und die Rotation
der Ecke iti = V2 lu,y + v,x) um eine Axe senkrecht zur Ebene
der Scheibe. Zusätzlich zu den 18 externen Verformungspara¬
metern der Ecken kommen noch zwei interne Verformungspara¬
meter. Anderheggen hat als interne Parameter an Stelle der
Schwerpunktverschiebungen u, v die folgenden Integrale ein¬
geführt:
ff U'dx-dy jjvdx-dy (32>
Diese zwei Parameter können durch "Kondensation" eliminiert
werden. Achtzehn Verformungsparameter (6 für jede Ecke) bleiben
dann für das DRSC18-Scheibenelement übrig.
Für die verwendeten Scheibenelemente und für orthotropes
Material erhält man die Normalkräfte durch die folgenden
Beziehungen:

-32-
"nx"
Ny . =
Nxy* >
s11 s12 °
s12 s22 0
0 0 S33
",y
(U,y + Vx)
(33)
worin:
ux=
£x ; vy=
6y und (Uy + viX) =/(Schiebung)
Für eine konstante Scheibendicke t und isotropes Material
bekommt man folgende Koeffizienten für ebene Spannungs¬
probleme (o-z = 0, ez ^ 0):
S11- S<-
E- t
'11 =22 [y_^'12 S11
*
*
(34)
S33~ S11= G't
Für ebene Dehnungsprobleme €z=
Oj crz ± 0 gelten die
folgenden Koeffizienten:

-33-
S11=
S22E-t-Q-z/)
(1 + ^)(1-2'ZJ)
zr-E-ts
- (35)12
(1 + P)-(1-2-ir)
S33"
2(1 + if)" b T
wobei E der Elastizitätsmodul, G der Schubmodul und V die
Poissons"sehe Zahl sind.
Für Scheibenelemente folgt die Formänderungsenergie als:
U = \ J7(€*-Nx +VNy + /'Nxy) 'dF < 36)
Die Gewährleistung der kinematischen Verträglichkeit verlangt
die Kontinuität der Verschiebungen für die Ränder von zwei be¬
nachbarten Elementen. Im Innern des Elementes sind die Ver¬
schiebungsansätze (Polynome 3. Grades in x und y) kontinuier¬
lich. Die Kontinuitätsbedingung bei den Rändern verlangt die
eindeutige Bestimmung der Verschiebungen der Ränder durch die
Verformungsparameter derselben. Das Polynom 3. Grades verlangt
vier Verformungsparameter pro Seitenverschiebung. Die Ver¬
formungsparameter der zwei Ecken der Seite enthalten eine Ver¬
schiebung (u bzw. v) und eine Dehnung (aus der Kombination von
-34-
u und u bzw. v und v ), sodass die Verschiebungen>x ,y ,x ,y
längs der Ränder durch die Verformungsparameter der Ecken
vollständig bestimmt sind. Die Starrkörperverschiebungen und
die Zustände konstanter Dehnung für die Vollständigkeit des
Verschiebungsansatzes sind durch die Terme 1,
X, y des
Interpolationspolynoms 3. Grades der DRSC18-Elemente gewähr¬
leistet.
Die Ableitung der Steifigkeitsmatrix und der Lastmatrizen
des Scheibenelementes DRSC18 wird im folgenden Teil be¬
schrieben. Die Koordinatensysteme des Bildes 2.3 (a,b)
gelten auch für dieses Element. Die Ansätze für die Ver¬
schiebungen u, v sind vollständige Polynome 3. Grades in
x und y. Die Dehnungen entstehen aus den ersten Ableitungen
der Verschiebungen u und v.
Für die Beschreibung der unabhängig voneinander angenommenen
Dehnungsfeldvariablen in Funktion der diskreten Dehnungs¬
parameter der Knotenanordnung nach Bild 2.3.b werden Inter¬
polationsfunktionen zweiten Grades in natürlichen Dreieck¬
koordinaten verwendet. Die Steifigkeitsmatrix für die dis¬
kreten Dehnungsparameter [k€] ist bis auf einige Faktoren
von der Geometrie und von den Materialeigenschaften unab¬
hängig. Eine kongruente Transformation der Steifigkeitsmatrix
[k€] gibt die für die 20 diskreten Verschiebungsparameter des
Dreieckes gesuchte Steifigkeitsmatrix [k].
Die "Kondensation" der zwei inneren Verformungsparameter
führt zur Steifigkeitsmatrix des Scheibenelementes DRSC18.
Die Knotenanordnung des Bildes 2.3.b für die Plattenelemente
wird für die diskreten Dehnungsparameter des Scheibenele¬
mentes benutzt. Definiert werden die folgenden Verschiebungs¬
vektoren nach Bild 2.3.b im kartesischen Koordinatensystem:

-35-
Wix20 = <77"»->-dx-dyijfy*vdx-dy i u1 ^ u1jX v1t)
/, cü1ju2 ••• oj2i u3---oj3>
und im schiefen Koordinatensystem;
WLrT <ffü'**'äfa VÜ1,* i Ü2 Ü2jOC ü2>^ j1x20
v2.» v2?ö; v \ß>~- <üs i vsf>
Die oberen Striche bezeichnen die Verschiebungen im schiefen
Koordinatensystem. Die Numerierung 1 bis 3 entspricht den
Ecken des Dreieckes.
Die Vektoren der diskreten Dehnungsparameter für das Knoten¬
system a bis f (entsprechend den Knoten 1 bis 6 des Bildes
2.3.b) folgen im kartesischen Koordinatensystem:
klk18
= <Uq,x UbtX..¦
UfiX i VQiy•••
Vf>y j
Xa •••/f>=<€xtki eyV \yl>
{€s}1x24 = <Qa,a ÜQwgi ÜbiCX übtß\ • • • j üf(CX UUß j
= <4 i 4s>
-36-
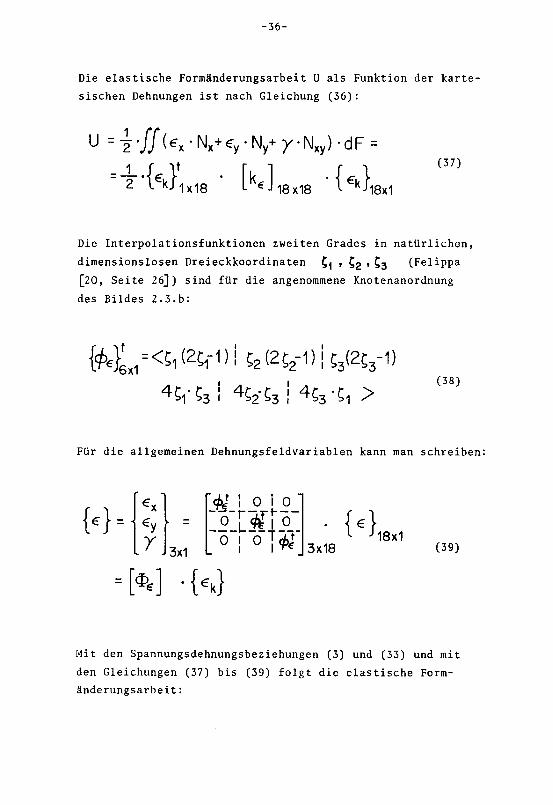
Die elastische Formänderungsarbeit U als Funktion der karte¬
sischen Dehnungen ist nach Gleichung (36):
U =i-//(€x-Nx+€y.Ny+/-Nxy)-dF =
= T'Kr1x18 * Lke]18x18 '{£k}18x1(37)
Die Interpolationsfunktionen zweiten Grades in natürlichen,
dimensionslosen Dreieckkoordinaten Ci ? £2 ' C3 (Felippa
[20, Seite 26j) sind für die angenommene Knotenanordnung
des Bildes 2.3.b:
{*L=<^(2^1) ie2(2c2-i)jc3(2c3-i)4^C3! 4C2C3j 4C3-C, >
(38)
Für die allgemeinen Dehnungsfeldvariablen kann man schreiben:
w=€*
€y' zz
73x1
JrVj _0 i 0_"
0 I o]i»H
3x1818x1
(39)
•W -Kl
Mit den Spannungsdehnungsbeziehungen (3) und (33) und mit
den Gleichungen (37) bis (39) folgt die elastische Form¬
änderungsarbeit :

-37-
'iW-f/W-W-W-dF^HW-W-W
Die Steifigkeitsmatrix für die diskreten Dehnungsparameter
ist:
w18x18
311
3127 >Tt-
o
522'M I°
0 ~[S33' [*]
F (41)
F ist die Fläche des Elementes.
Die Matrix ty] gxg ist eine numerische Matrix, die analog
zum Plattenelement (Gleichung (27)) integriert wird. Eine kon¬
gruente Transformation gibt die gesuchte Steifigkeitsmatrix für
die Verformungsparameter:
[*wm'-M-[T] (42)
Diese Scbeibenelemente haben den Vorteil, dass die Berechnung
der Spannungen in den Elementecken aus den Dehnungsverformungs-
parametern u)X , v,y , y trivial ist. Das bedingt aber auch
eine unnötige Kontinuität der Dehnungen in den Ecken. Falls

-38-
die Matrix [D] (aus (3)) der Spannungsdehnungsbeziehungen
nicht kontinuierlich ist, entstehen Fehler bei den berech¬
neten Eckspannungen.
2.2.4 Balkenelement BAL24
Das Balkenelement BAL24 ist mit den verwendeten Platten- und
Scheibenelementen DRPL18, VKPL24 bzw. DRSC18, VKSC24 voll¬
ständig verträglich für die vertikale Verschiebung w und für
die Verschiebung u in seiner Längsaxe. Das Element BAL24 ent¬
steht aus der Annahme eines vollständigen Polynoms 5. Grades
für die Verschiebung w senkrecht zur Plattenebene und eines
vollständigen Polynoms 3. Grades für die Verschiebung in
Längsrichtung. Das Element ist nach den Bildern 2.2 und 3.2
exzentrisch an der Platte angeschlossen. Mehrain [22] und
Argyris [36] haben ähnliche Balkenelemente entwickelt.
Der angenommene Balken hat keine Torsionssteifigkeit und
keine Querbiegesteifigkeit. Für einen beliebigen Punkt des
symmetrischen Balkens gelten die folgenden Beziehungen für
das lokale Koordinatensystem des Bildes 2.2:
w(x,z)= w(x,o) = w (x) bzw.
/ \ / \ dw(x.o) - —
u(x,z)= u(x,o)- dx'•
z =
u-wtX•
z
(43)
Die einzige Dehnung €x ,die bei der Bestimmung der
elastischen Formänderungsenergie berücksichtigt wird, ist:
€X(X,Z)= Ux=
U)X- Wxx- Z C44)

-39-
Als Verschiebungsansatz für die Durchbiegung w(x) wird ein
Polynom 5. Grades in x mit sechs Termen und als Verschie¬
bungsansatz für die Verschiebung u(x) wird ein Polynom 3.
Grades in x mit vier Termen angenommen. Der Vektor {f*f der
lokalen, in den Knoten 1 und 2 definierten Verformungspara¬
meter des Balkenelementes ist nach Bild 2.2:
r. -\
>- Jlx10= <W- W.
1 "1,x
w2 w2jX
w.1,xx U1 U1,x
W2,xx U2 ü2,x>
Analog zur Gleichung (1) folgt:
{Vi- [*"i*uU¦{'•}= [*]¦{'•}
Die Berechnung für die Dehnung €x ist analog zur Gleichung
(2):
<A<3»{f*}
wo <A4>> aus der Berücksichtigung der Gleichung (44) von
[3>] abgeleitet wird.
Die Formänderungsenergie des Balkens ist nach Gleichung (4):
U = TjffR- Ol' dV = ifJM • E •
«„=
=l-{f}'7/M>'E^*>{f'}-dv4{f}'K].{f}V
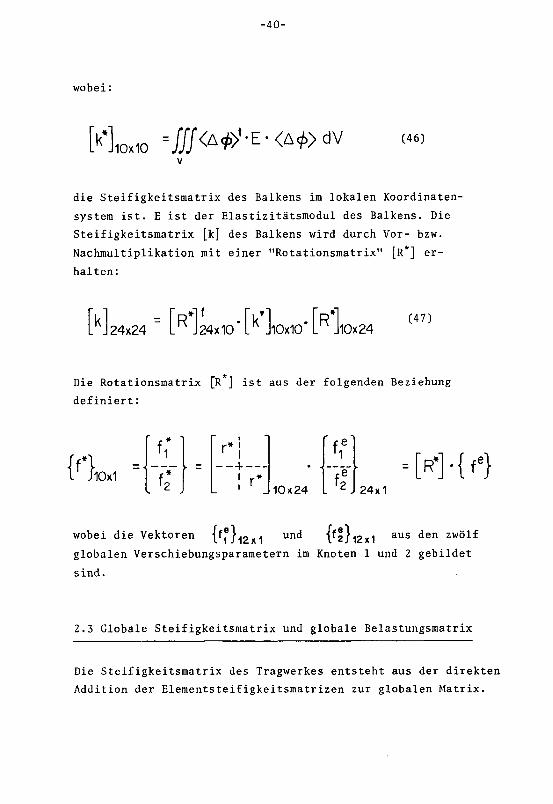
-40-
wobei:
Mw» =///<A*>'-E-<A<#>>dV («,
die Steifigkeitsmatrix des Balkens im lokalen Koordinaten¬
system ist. E ist der Elastizitätsmodul des Balkens. Die
Steifigkeitsmatrix [k] des Balkens wird durch Vor- bzw.
Nachmultiplikation mit einer "Rotationsmatrix" [R*] er¬
halten:
[kk24=[R"L»-[k"]110x10R"
Jl0x24(47)
Die Rotationsmatrix [R ] ist aus der folgenden Beziehung
definiert:
L J10x1
r » i
fl l >| ff6]T1
f*2
• —__ + ___
i r*
i'
•
10x24 .2.
[*Hf}J 24x1
wobei die Vektoren vf}<i2x1 unc* V2J12x1 aus ^en zw°lf
globalen Verschiebungsparametern im Knoten 1 und 2 gebildet
sind.
2.3 Globale Steifigkeitsmatrix und globale Belastungsmatrix
Die Steifigkeitsmatrix des Tragwerkes entsteht aus der direkten
Addition der Elementsteifigkeitsmatrizen zur globalen Matrix.

-41-
Dies ist möglich, weil die Elementsteifigkeitsmatrizen sich
auf Koordinatenrichtungen beziehen, die parallel zu den glo¬
balen sind. Dasselbe gilt für die Belastungsvektoren. Prak¬
tisch erfolgt eine Umnumerierung der Verformungsparameter,
die durch eine "topologische" Matrixmultiplikation symboli¬
siert werden kann:
{f} = [r] • {f*}
Der Vektor |f9| stellt alle im globalen Koordinatensystem
befindlichen Verformungsparameter des Tragwerkes dar. Die
Matrix [Te] enthält Glieder, die eins oder Null sind, je
nachdem, ob die globalen Verformungsparameter mit den Element¬
verformungsparametern identisch sind oder nicht. Diese Matrix
wird auch als "Topologiematrix" bezeichnet.
Für das elastische Potential Ue des Elementes gilt dann:
s-Hf«Hk<Hf} <«>
In diesem Ausdruck wird die globale Elementsteifigkeitsmatrix
definiert als:

-42-
Analog kann man das Potential V der äusseren Kräfte definieren
als:
v=-{f},-{p'}=-{f,y-[T'],-{p'}
=-{'9}-{pg}
(51)
In dieser Gleichung wird der globale Elementlastvektor be¬
stimmt als:
{p4=[Te]'-{pe} <5Z)
Die potentielle Energie TT des Systems ist die Summe aller
potentiellen Energien der Elemente:
NEL NEL
TT = I Uj + I V| =
i=1 i=1
= i £{fl[k«Hf9}-£{¦¦}'•M •
= m-z [k'H?}-M'.?M =
1=1 1=1»¦ j
¦i{f}-[K].{f«} -{ff{P}

-43-
NEL ist die totale Anzahl Elemente des Tragwerkes. Die globale
Steifigkeitsmatrix [K] folgt aus der oberen Beziehung als:
NEL' -
(54,M - % \Ai=1
Die globale Belastungsmatrix ist auch analog:
f 1 NEL r i
{p} = y {pg} (55)
In Wirklichkeit werden die Multiplikationen mit der Matrix
Lje] nicht formell ausgeführt, sondern es erfolgt eine
direkte Addition der Steifigkeitskoeffizienten zu den dazu¬
gehörigen Knoten. Nach der Bildung von [K] werden die kine¬
matischen Randbedingungen eingeführt, durch eine Addition
von geeigneten Steifigkeitskoeffizienten zu den entsprechen¬
den Diagonalgliedern der [K]-Matrix. Im folgenden Kapitel 7
wird dieser Vorgang näher beschrieben. Durch die Anwendung
des Minimumprinzips der potentiellen Energie bekommt man:
ÄJL.
<3{fg}[KHf9} - {p} = ° (56)
Diese Gleichung stellt ein lineares Gleichungssystem für
die unbekannten Verformungsparameter des Tragwerkes dar.

-44-
2.4 Lösung des Gleichungssystems und Berechnungen
der Schnittkräfte
Für die numerische Lösung des linearen Gleichungssystems werden
bekannte Algorithmen nach dem Gauss'sehen Eliminationsverfahren
oder nach dem Cholesky-Verfahren [11,63] verwendet. Die Anzahl
Gleichungen und die Rechenzeit für deren Auflösung sind schon
für mittlere Probleme gross. Diese Zeit stellt den grössten
Anteil der Rechenzeit dar, die für die Berechnung des Trag¬
werkes nötig ist. Melosh [43], Iron [44] und Anderheggen [32]haben Lösungsalgorithmen unter besonderer Berücksichtigung der
Methode der endlichen Elemente vorgeschlagen.
Im entwickelten Programm sind zwei Lösungsalgorithmen ein¬
gebaut. Als erstes ist das Lösungsprogramm von Anderheggen
[32] nach dem Gauss'sehen Eliminationsverfahren verwendet
worden. Das Programm erlaubt die Lösung von unbeschränkt
grossen, bandförmigen Gleichungssystemen. Die globale Stei¬
figkeitsmatrix [K] und der globale Belastungsvektor |p|werden in gleich grosse Blöcke unterteilt. Die Anzahl Kolonnen
NK der Blöcke von [K] ist konstant angenommen. Die Grösse
NK ist gleich der um eins erhöhten maximalen Differenz der
zu den Verformungsparametern eines Elementes gehörenden
Nummern. NK wird oft als maximale Bandbreite des Gleichungs¬
systems bezeichnet (Bild 5.1). Als zweites Lösungsprogramm
[48] ist ein Algorithmus nach Cholesky im Programm eingebaut
worden. Dieses Programm arbeitet mit Blöcken, deren Anzahl
Elemente pro Zeile variabel ist, was Speicherplatz und Rechen¬
zeit erspart.
Sobald die Verformungsparameter bekannt sind, sind auch die
Dehnungen in den entsprechenden Knoten bekannt. Bei den ge¬
wählten Elementen (DRPL18, VKPL24, DRSC18, VKSC24, BAL24)

-45-
sind die Dehnungen direkt als Verformungsparameter enthalten.
Die Berechnung der Spannungen in den Knoten der Platten- und
Scheibenelemente erfolgt direkt aus den Gleichungen des Ab¬
schnittes 2.1.
2.5 Verschiedene kompatible Plattenelemente
Das Plattenelement DRPL21 gehört zu einer Familie von drei¬
eckigen Elementen, die von Argyris den Namen TUBA [36] er¬
halten haben. Die Ansatzfunktionen für die Durchbiegung
w(x,y) sind vollständige Polynome von fünftem und höherem
Grad. Als Verschiebungsparameter sind die Krümmungen w,
w,w mit der Verschiebung w und den zwei Verdrehungen
>yy >xy
w , w an den drei Ecken des Dreieckes immer vorhanden.,x ,y
Zusätzlich kommen, je nach dem Grad n des Interpolations¬
polynoms, (n+1)(n+2)/2-18, weitere Verformungsparameter für
die Seiten und im Innern des Elementes dazu. Die Verteilung
dieser restlichen Verformungsparameter wird durch die Bedin¬
gungen für die kinematische Verträglichkeit der Verschie¬
bungen und Verdrehungen der Ränder bestimmt. Diese Parameter
sind vertikale Verschiebungen und Verdrehungen normal zu den
Rändern.
Die Verträglichkeit der Verschiebungen w der Ränder verlangt
pro Seite n-5 Verschiebungsparameter. Die Verträglichkeit
der Verdrehungen w normal zu den Seiten (Polynom vom Grad
n-1) verlangt pro Seite n-4 Verschiebungsparameter. Es bleiben
somit im Innern des Elementes (n-5)(n-4)/2 weitere Parameter.
Die Tabelle 2.5.1 gibt eine Uebersicht über diese Familie von
Elementen. Die Elemente DRPL28 und DRPL36 sind auch von Argyris
[36] unter den Namen TUBA13 und TUBA15 beschrieben worden. Das
Bild 2.1 zeigt z.B. eine mögliche Konfiguration des DRPL45-
Plattenelementes. Bei steigendem Grad n des Interpolations¬
polynoms steigt auch die Anzahl der Seitenverformungspara¬
meter.

Grad
des
Polynoms
Verschiebungs¬
parameter
auf
den
Seiten
Verdrehungs¬
parameter
aufden
Seiten
Interne
Verschiebungs¬
parameter
Total
Parameter
Bezeichnung
5 6 7 8 9
0 3 6 9
12
3 6 9
12
15
0 1 3 6 10
21
28
36
45
55
DRPL
21
DRPL28
DRPL
36
DRPL45
DRPL55
n3-(n-5)
3-(n-4)
(n-5)-(n-4)/2
(n+1)-(n+2)/2
Tabelle
2.5.1
Kompatible
Verschiebungselemente

-47-
Diese Parameter haben einen grösseren Einfluss auf die Anzahl
Gleichungen und auf die Bandbreite der globalen Steifigkeits¬
matrix als die Parameter der Ecken des Dreieckes.
Viereckige Elemente können mit der Zusammenstellung von vier
dreieckigen Elementen gebildet werden. Zum Beispiel entsteht
aus vier DRPL21 ein Viereck VKPL24 (Bild 2.4.b). Die vier
externen Seitenverdrehungen werden eliminiert wie beim DRPL18-
Element. Dieses Vorgehen hat den Vorteil, dass die Anzahl
Gleichungen, und vor allem die Bandbreite, reduziert werden.
Im Innern des Viereckes entstehen in diesem Fall zehn Ver¬
formungsparameter. Diese Parameter werden "kondensiert" und
damit aus dem Gleichungssystem eliminiert. Die "Kondensation"
erlaubt eine Reduktion der Grösse der Steifigkeitsmatrizen
und der Lastvektoren ohne Beeinflussung des Verformungsver¬
haltens des Elementes.
Es folgen einige Betrachtungen über den Einfluss der Anordnung
der Verformungsparameter im Element selber. Aehnliche Ueber-
legungen wurden von Fjeld [16] und Anderheggen [47] gemacht.
Es sei eine Platte in eine grosse Anzahl NEL Elemente unter¬
teilt. Die Anzahl Knoten NKN und Seiten NSE sind mit der An¬
zahl Elemente NEL folgendermassen verbunden. Das Kontinuum
wird zuerst in dreieckförmige Elemente unterteilt. Die Summe
der Winkel eines Dreieckes ist 180 Grad und zu jedem Knoten
gehört ein Winkel von 360 Grad. Wenn NEL gross ist, gilt:
360 • NKN « 180 • NEL d.h. :
NKN » 0.5 • NEL
Die Anzahl Seiten pro Dreieck ist drei. Jede Seite gehört
aber zu zwei Dreiecken. Für ein grosses NEL gilt also:

-48-
3 • NEL ~ 2 • NSE d.h. :
NSE ~ 1.5 • NEL
Wenn die Anzahl Verformungsparameter der Knoten NFKN und
der Seiten NFS ist, hätte man als totale Anzahl Gleichungen
NTGL für das gewählte System mit einer Unterteilung in
Dreiecke:
NTGL3 ~ 0.5 -NEL -NFKN +1.5- NEL -NFS
Für eine Unterteilung in Vierecke gibt es analoge Beziehungen.
Das Knotenelementverhältnis ist:
NKN w NEL
und das Seitenelementverhältnis:
2-NEL~ NSE
Für die totale Anzahl Gleichungen folgt:
NTGL4 « NEL • NFKN + 2-NEL- NFS
Folgende Ueberlegungen gelten für die in Tabelle 2.5.1 an¬
gegebenen Dreieckelemente. Das Dreieckelement DRPL18 folgt
aus DRPL21 durch Elimination der drei Normalverdrehungen in
Seitenmitte. Die benützten Viereckelemente bestehen aus vier
Dreiecken. Die inneren Verformungsparameter sind "kondensiert"

-49-
worden. So entsteht z.B. aus vier DRPL21-Elementen ein
Viereckelement VKPL24 mit 24 Verformungsparametern (Bild
2.4.b).
Die Tabelle 2.5.2 gibt für eine Reihe von Elementen eine
Zusammenstellung des Einflusses der Seitenverformungspara¬
meter auf die totale Anzahl Gleichungen einer grossen
Elementmasche.

Bezeichnung
Element
NFS
NTKN
NTSE
NTGL/NEL
NTSE./NTKN-100
DRPL
18
DRPL
21
DRPL45
0 1 7
3-NEL
3-NEL
3-NEL
0
1.5-NEL
10.5-NEL
3 4.5
13.5
0
50
350
VKPL24
VKPL28
VKPL52
0 1 7
6-NEL
6•
NEL
6•NEL
0
2-NEL
14-NEL
6 8
20
0
-33
-233
NFS
=Anzahl
NTKN=
Totale
NTSE=
Totale
NTGL=
Totale
Verformungsparameter
einer
Seite
(ohne
Ecken)
Anzahl
Eckenverformungsparameter
für
NEL
Elemente(NFKN
•
NEL/2)
Anzahl
Seitenverformungsparameter
für
NEL
Elemente(2-NFS-NEL)
Anzahl
Gleichungen
des
Tragwerkes(NTKN+NTSE)
Tabelle
2.5.2.
:Verhältnis
Seitenverformungsparameter-
Eckenverformungsparameter
-51-
In der Tabelle wurden Elemente dargestellt, bei denen die
Anzahl Verformungsparameter der Ecken NFKN gleich sechs ist.
Die Vergrösserung des prozentualen Anteiles der Seiten- zu
den Eckenverformungsparametern bei den aus Interpolations¬
polynomen höheren Grades entwickelten Elementen hat die Zu¬
nahme der Anzahl Gleichungen des Systems und die Zunahme der
Bandbreite zur Folge. Der Uebergang vom Dreieckelement DRPL18
zum Element DRPL21 erhöht die Anzahl Gleichungen um 50 % .
Zusätzlich wird die Bandbreite erhöht. Die Erhöhung der
Genauigkeit im Uebergang von DRPL18 zu DRPL21 ist gering
und mit einem grossen Rechenaufwand verbunden. Dies wurde
durch viele durchgerechnete Beispiele bestätigt.
Die Aussage der vierten Kolonne der Tabelle 2.5.2 bestätigt
die vorteilhafte Anzahl Gleichungen bei einer Konzentration
der Verformungsparameter in den Ecken.

-52-
3. GENERELLE UEBERSICHT DES PROGRAMMES
Das Programm FEAPS ("Finite Element Analysis of Plate System")
erlaubt die Berechnung von beliebig begrenzten und belasteten
Platten und Rippenplatten. Bei reinen Plattenproblemen (ohne
Scheibenwirkung) werden nur Plattenbiegungselemente einge¬
setzt. Für die Berechnung von Rippenplatten (Bild 3.1) werden
Platten-, Scheiben- und exzentrisch angeschlossene Balken¬
elemente verwendet.
Die Verformungsparameter der Platten- und Scheibenelemente
sind an sich voneinander unabhängig. Durch die exzentrisch
angehängten Balkenelemente (Bild 3.2) wird die Platten- und
Scheibenwirkung gekoppelt. Bei den Rippenplatten bezeichnet
man als "Schalenelement" die Kombination des Platten- und
Scheibenelementes.
Die Elementunterteilung muss nach bestimmten Regeln erfolgen.
Das Tragwerk wird in Längsrichtung in Kolonnen von Elementen
unterteilt. Jede Kolonne besteht aus einer Anzahl gleicher
oder/und ungleicher Elemente. Die Elemente gleicher Geometrie
(Form und Abmessungen der Dreiecke, Vierecke oder Balken)
und gleicher Materialeigenschaften werden zu Elementtyp-
Gruppen zusammengefasst. Die Anzahl der Elementtypen ist so
klein wie möglich zu halten, damit der Umfang der Eingabe
des Programmes und die Rechenzeit zur Bestimmung der Steifig-
keitsmatrizen der Elementtypen minimal sind.
Verschiedene Elementarten (Bild 3.1) sind möglich:
-53-
VK : Viereck.
DR : Dreieck mit Spitze rechts: d.h. nur ein Knoten
auf der rechten Kolonnenseite.
DL : Dreieck mit Spitze links: d.h. nur ein Knoten
auf der linken Kolonnenseite.
VS : Elastisch aufliegendes Viereck (dient zum
Einbau von Stützen und für die Berechnung
von Fundamentplatten).
BL : Balkenelemente in Längsrichtung.
Die Elemente sind an den Längsrändern der
"Schalenelemente" exzentrisch angehängt.
BQ : Balkenelemente in Querrichtung.
Die Elemente sind an den Querrändern der
"Schalenelemente" exzentrisch angehängt.
Jedes Element kann eigene Material'eigenschaften aufweisen.
Das Material kann orthotrop oder isotrop sein. Im ersten
Fall braucht man vier Konstanten für die Platte und acht
für die Rippenplatte. Im zweiten Fall genügen zwei Kon¬
stanten (Elastizitätsmodul und Poissons'sehe Zahl), um
das Material zu beschreiben (Gleichungen (20, 21, 33, 34,
35)).
Im Falle der Rippenplatte hat jeder Knoten zwölf Verfor¬
mungsparameter: die sechs Parameter des Plattenelementes
DRPL18 [32] (Verschiebung w, Verdrehungen w,w und
>x ,y
Krümmungen w,w
,w ) und die sechs Parameter des
,xx ,yy ,xyScheibenelementes DRSC18 [32] (Verschiebungen u,v , Dehnungen
eY= u
, € = v, Schiebung y = (u + v ) und Ecken-
A »•*¦ / >/ >/ >A
rotation üj = 1/2.(u + v ) um eine Senkrechte zur Scheiben-* y i
x
ebene). Bei der Steifigkeitsmatrix des "Schalenelementes"
nach Bild 3.3 kann man formell eine den Plattenparametern (A)

-54-
und eine den Scheibenverformungsparametern (B) entsprechende
Zone unterscheiden. Der Zone (A) entspricht die Steifigkeits¬
matrix des Plattenelementes DRPL18 (oder VKPL24) und der Zone
(B) entspricht die Steifigkeitsmatrix des Scheibenelementes
DRSC18 (oder VKSC24). Die Verformungsparameter der Balken¬
elemente sind diejenigen der Platten- und Scheibenelemente.
Im Bild 3.3 sieht man die von den Balkenverformungsparametern
besetzten Zonen (A, B, C). Die Zone (C) stellt formell die
Koppelung der Platten- und Scheibenverformungsparameter
durch die Balken dar. Im Falle einer vertikalen Belastung
entstehen somit infolge der Exzentrizität der Balken auch
Scheibenverformungen.
Beliebige knotengebundene Randbedingungen, inklusiv ela¬
stische Einspannung, können eingegeben werden. Statische
Belastungen aller Arten (gleichmässig verteilte Element¬
belastungen und Linienlasten (Elementrandlasten) senkrecht
zur Plattenebene, konzentrierte Knotenlasten, Momenten-
einflussflächen, feste Verformungen, Vorspannung bei den
Elementrändern) können berechnet werden.
Das Programm ist in FORTRAN IV und für kleine Programmteile
in der "Assembler"-Sprache COMPASS für die Rechenanlage
CONTROL DATA 6500 programmiert worden. Die Angaben über die
angewendeten Programmiersprachen und über die Arbeitsweise
der Rechenanlage CDC 6500 können aus den folgenden Publika¬
tionen der CONTROL DATA über die 6000-Familie gelesen werden:
FORTRAN Referenee Manual Publ. No. 60174900/1969
COMPASS Referenee Manual Publ. No. 60190900/1969
SCOPE Referenee Manual Publ. No. 60189400/1969

-55-
Man unterscheidet CP- ("Central Processor") und I/O- ("Input/
Output") Rechenzeit. Die erste ist die Zeit des Zentral¬
rechners und die zweite ist diejenige für die Ein- und Aus¬
gabe von und zu den peripheren Geräten.
Das ganze Programm bleibt nicht gleichzeitig im Kernspeicher
der Rechenanlage, sondern ist in Programmstücke ("Overlays")
unterteilt, die nacheinander geladen und ausgeführt werden.
Jede neue Ladung von einem "Overlay" überschreibt den alten
Programmteil. Ein kleines, im Kernspeicher ständig bleibendes
Hauptprogramm "Main" (Bild 3.4) steuert die Ladung der ver¬
schiedenen Programmteile ("Overlays"). Mit dieser Anordnung
steht mehr Platz für die Speicherung der problemabhängigen
Daten zur Verfügung. Bild 3.5 zeigt im Detail die Speicher¬
konfiguration. Das folgende Bild 3.6 zeigt die Speicher¬
benützung während der Berechnung mit den verschiedenen Pro¬
grammteilen ("Overlays"). In diesen beiden Bildern fängt das
"Blank-Common" mit dem "Array" (eindimensionale Matrix)
U(l) an.
-56-
4. BEGRUENDUNG DER EINGABE
4.1 Elementorientierte Eingabe
Die bekannten allgemeinen Programme für die Berechnung von
Stabwerken und Flächentragwerken (STRESS [33], ASKA [l],
STRIP [56], EASE [57]) sind "knotenorientiert" aufgebaut.
Diese Eingabeart verlangt die Angabe der globalen Knoten¬
koordinaten (Geometrie-Eingabe). Für die Festlegung der
Lage der Elemente im Knotennetz sind zusätzliche Daten
notwendig. Diese Informationen geben an, mit welchen Knoten
die Elemente verbunden sind. Sie werden oft als "topolo-
gische" Angaben bezeichnet. Die "elementorientierte" Eingabe
des Programmes basiert auf der, im dritten Kapitel beschrie¬
benen Kolonnenunterteilung des Tragwerkes. Das Plattensystem
wird in Elemente einfacher Geometrie unterteilt. Dabei wird
aber eine möglichst kleine Anzahl von sich wiederholenden
Elementtypen angestrebt. Die Eingabe der Geometrie beschränkt
sich auf der Beschreibung der Elementtypen. Die Eingabe der
Elementanordnung ("Topologie-Eingabe") gibt in diesem Fall
die Reihenfolge der Elemente in den Kolonnen (Bild 3.1) an.
Eine zusätzliche Vereinfachung der Geometrieeingabe ist
möglich. Die Elemente des zweidimensionalen Tragwerkes müssen
aufgrund der angegebenen Anordnung ("Topologie") geometrisch
verträglich sein. Das bedeutet, dass viele Angaben der Geome¬
trie von der "Topologie" und von vorher angegebenen geome¬
trischen Grössen abgeleitet werden können (Abschnitt 4.3).
In den folgenden Abschnitten wird durch Beispiele diese Ein¬
gabeart ausführlich beschrieben. Die Eingabe der Randbedin¬
gungen und der Belastungen ist ebenfalls "elementorientiert".

-57-
4.2 Bandförmige globale Steifigkeitsmatrix
Die Unterteilung des Tragwerkes in Kolonnen von Elementen
ist mit einer Knotennumerierung nach Bild 4.1 verbunden.
Die gewählte Numerierung hat einen günstigen Einfluss auf die
Struktur der globalen Steifigkeitsmatrix des Tragwerkes, da
diese bandförmig wird. Als Bandbreite für eine gewählte Zeile
der globalen Steifigkeitsmatrix wird die Anzahl der Koeffizien¬
ten, angefangen vom Diagonalglied bis zum letzten Term, welches
noch ungleich Null ist, bezeichnet. Wenn man alle Verformungs¬
parameter des Tragwerkes in der Knotenreihenfolge des Bildes
4.1 numeriert, bekommt man die Bandbreite für einen bestimmten
Verformungsparameter (d.h. für eine bestimmte Zeile der glo¬
balen Steifigkeitsmatrix) durch Subtraktion der Zahl des be¬
trachteten Parameters von der höchsten Parameterzahl des dazu¬
gehörenden Elementes plus eins. Das gewählte Element enthält
den untersuchten Verformungsparameter sowie den Verformungs¬
parameter mit der grössten möglichen Zahl der Numerierung.
Die Wahl der Knotennumerierung nach Bild 4.1 zuerst in der
Kolonnenrichtung, die am wenigsten Knoten aufweist, ergibt
minimale Bandbreiten und minimale Rechenzeiten für die Lösung
des Gleichungssystems. Diese Rechenzeit ist, mit der Anwendung
des Gauss'sehen Eliminationsverfahrens oder des Cholesky-
Verfahrens, proportional zur totalen Anzahl Gleichungen mal
die Bandbreite im Quadrat und stellt den grössten Anteil der
gesamten Rechenzeit dar. Das Bild 4.2 zeigt, wie auch für
komplizierte Plattensysteme mit Hilfe der gewählten Unter¬
teilung und Numerierung minimale Bandbreiten erzeugt werden
können. Zusammenfassend wurde für die Entwicklung des Pro¬
grammes den folgenden Punkten Aufmerksamkeit geschenkt:

-58-
a) Einfache Beschreibung des Tragwerkes und
einfache Anordnung der Elemente.
b) Minimale Bandbreite durch günstige Numerierung
der Verformungsparameter.
c) Minimale Rechenzeit für die Lösung des Gleichungs¬
systems durch Wahl von geeigneten Algorithmen.
Die getroffenen Wahlen sind:
a) "Elementorientierte" Eingabe verbunden mit der Unter¬
teilung des Tragwerkes in Kolonnen von Elementen. Ein¬
führung von Elementtypen, die eine bestimmte Geometrie
und bestimmte Materialeigenschaften haben, und die sich
so oft wie möglich wiederholen. Minimale Eingabe für die
Geometrie der Elementtypen durch automatische Berech¬
nung gewisser Elementdimensionen durch die Berücksich¬
tigung der relativen Anordnung ("Topologie") der
Elemente.
b) Konsequente Numerierung der Verformungsparameter, um
die Bandbreite und damit die Rechenzeit für die Lösung
des Gleichungssystems minimal zu halten.
c) Lösungsalgorithmus nach Cholesky mit besonderer Berück¬
sichtigung der variablen Bandbreite.
4.3 Eingabeprogramm
Das Eingabeprogramm liest die Daten und verarbeitet sie für
die spätere Zusammenstellung des Gleichungssystems. Das Bild
4.3 zeigt das Flussdiagramm dieses Programmstückes. Die Be¬
deutung der Symbole ist aus der Eingabebeschreibung des Pro¬
grammes ersichtlich (Anhang I). Sowohl orthotrope als auch

-59-
isotrope Materialeigenschaften können eingegeben werden.
Falls die Anzahl Materialien grösser als zwei ist, kann man
noch zusätzliche orthotrope oder isotrope Eigenschaften ein¬
geben. Die Geometrie wird für die eingegebene Anzahl Element¬
typen gegeben. Die normalen Eingaben sind die sechs (für das
Viereck) oder die vier (für die Dreiecke) Koordinaten x,y
der Knoten 2, 3 und eventuell 4 (für die Vierecke) bezüglich
Knoten 1 (Bild 4.4.a). Gemeinsam mit diesen Daten werden
die Dicke des Elementes und die Materialnummer angegeben.
Die Numerierung der Knoten des Elementes erfolgt im Gegen¬
uhrzeigersinn. Falls die Elementanordnung ("Topologie"),
die nachher eingegeben wird, die Berechnung von bestimmten
Koordinaten ermöglicht, kann man die entsprechenden Angaben
weglassen. Das Bild 4.4.b veranschaulicht diese vereinfachte
Eingabemethode. Für dieses Beispiel werden die folgenden
Koordinaten eingegeben:
Für den Elementtyp I der Vierecke gibt man sechs relative
Koordinaten nach Bild 4.4.a. Für Typ II der Vierecke ge¬
nügen die relativen Koordinaten von Knoten 13 und 6 bezüg¬
lich 5, für Typ III der Vierecke die Angaben der Knoten 22
und 23 bezüglich Knoten 15, für Typ IV der Vierecke die An¬
gaben der Knoten 27 und 28 bezüglich 22 und für die Typen
V bis VII nur die Angaben der Knoten 29 bezüglich 23, 30
bezüglich 24 und 31 bezüglich 25. Die Angabe von 24 Grössen
genügt für die Beschreibung der Knotenkoordinaten der ganzen
Platte.
Für die Balkengeometrie benötigt man die Länge nicht. Sie
wird vom Programm automatisch berechnet. Für die einzelnen
Balkentypen werden die Balkenexzentrizität, das Eigenträg¬
heitsmoment und die Querschnittsfläche zusammen mit der
Materialnummer eingegeben. Die Eingabe der Plattenelement-
anordnung ("Plattentopologie") erfolgt kolonnenweise von
"links" nach "rechts" und in jeder Kolonne elementweise von
"unten" nach "oben".

-60-
Bei dieser Eingabe wird die Kolonne, die Form des Elementes
(VK: Viereck; VS: elastisch aufgelagertes Element; DL: Drei¬
eck mit Spitze links; DR: Dreieck mit Spitze rechts), die
Nummer des Elementtyps, die Anzahl gleicher Elemente nach¬
einander in der Kolonne und der Winkel ALPHA angegeben. Das
Element wird im Gegenuhrzeigersinn bezüglich des globalen
Koordinatensystems um ALPHA gedreht. Falls mehrere Kolonnen
gleich sind, genügt nach der Eingabe der ersten Kolonne die
Angabe der letzten Kolonnenzahl zur automatischen Erzeugung
aller dazwischen liegenden Kolonnen. Das Programm kon¬
trolliert die Kompatibilität der nebeneinander liegenden
Elemente und berechnet die fehlenden Geometrieangaben, die
von der Elementanordnung abgeleitet werden können.
Die Eingabe der Balkenelementanordnung ("Balkentopologie")
ist nur im Falle der Rippenplatte notwendig. Die zwei Balken¬
arten BL, BQ haben je eine eigene Eingabe der Elementanord¬
nung. Die Balken BL quer zu den Kolonnen werden nur an der
Seite zwischen den Knoten 1 und 2 (Bild 4.4.a) der "Schalen¬
elemente" angehängt. Die Balken BQ längs der Kolonnen werden
an der linken Seite (Knoten 1 und 4 für die Vierecke; Knoten
1 und 3 für die Dreiecke) der "Schalenelemente" angeschlossen.
Die Eingabe der Randbedingungen ist "elementorientiert".
Gegeben wird die Elementkolonne, das Element mit seiner Knoten¬
nummer und die Anzahl gleicher Randbedingungen in der Kolonne.
Es folgen die Verformungen, die gleich Null gesetzt werden
können.
Eine weitere mögliche Eingabe ist der Rotationswinkel im
Gegenuhrzeigersinn des lokalen Koordinatensystems der Knoten¬
verformungen. Falls die Verformungsparameter eine elastische
Einspannung aufweisen, ist noch ein entsprechender Steifig-
keitskoeffizient (Kraft pro Einheitsverformung) einzugeben.
-61-
Wird dieser Koeffizient nicht angegeben, so wird er gleich
einer sehr grossen Zahl (10 ) gesetzt. Das bedeutet eine
Nullsetzung der entsprechenden Verformungen. Die zwölf Knoten¬
verformungsparameter der Rippenplatte oder die sechs der Platte
können einzeln aufgeführt werden. Für die meistgebrauchten Auf¬
lagerungsarten (einfach gelagert, eingespannt, symmetrisch)
sind Kennworte vorgesehen. Symmetrie entlang einer Linie p
verlangt, dass die Verdrehung w normal dazu und die Drillung
w zu Null gesetzt werden.,np
B
Man kann eine beliebige Anzahl Belastungsfälle angeben. Jeder
Belastungsfall besteht aus einer beliebigen Anzahl Lasten.
Die Eingabe ist "elementorientiert". Folgende Lasten sind
möglich:
a) Gleichmässige Belastung über das gesamte Tragwerk
(Bezeichnung GT) senkrecht zur Plattenebene.
b) Gleichmässige Belastung über einzelne Elemente
(Bezeichnung GE) senkrecht zur Plattenebene.
c) Konzentrierte Knotenlasten (Bezeichnung KE).
Als konzentrierte Lasten sind Kräfte und Momente
möglich. Einflussflächen können auch für die
Krümmungenw
,w
,w oder für die Momente
6,xx ,yy ,xy
M,M , M erzeugt werden (Kapitel 6).
Vorgeschriebene Verformungen von Auflagern (z.B.
Senkung oder Verdrehung) sind möglich (Kapitel 7).
d) Linienlasten (Elementrandlasten) (Bezeichnung RE)
senkrecht zur Plattenebene.
e) Vorspannung (Bezeichnung VO). Es können parabel-
förmige Kabel an den Rändern einzelner Elemente
eingeführt werden (Anhang I).
f) Kombinationen der vorher angegebenen Belastungsfälle.
-62-
Gegeben sind: die Form der Belastung mit den vorher beschrie¬
benen Bezeichnungen, die Richtung der Belastung und, falls
nötig, die Kolonne, die Elementnummer in der Kolonne, die
Knotennummer des Elementes und die Anzahl Elemente in der
Kolonne, die gleiche Lasten bekommen. Darauf folgt der Wert
der Belastung oder die Vorspannkraft und die Kabelexzentri¬
zitäten am Anfang, in der Mitte und am Ende des Elementrandes.
-63-
5. GLOBALE STEIFIGKEITSMATRIX
Die globale Steifigkeitsmatrix des Systems entsteht aus der
direkten Addition der Elementsteifigkeitsmatrizen zur globalen
Steifigkeitsmatrix [K] (direkte Steifigkeitsmethode, Gleichung
(54)). Die globale Matrix wird von einem Energieausdruck ab¬
geleitet und ist deswegen symmetrisch. Die obere Hälfte von
[K] wird in Blöcke konstanter Anzahl Zeilen (NZ) unterteilt
und auf den Plattenspeicher geschrieben. Die Matrix weist
aufgrund der getroffenen und in den vorherigen Kapiteln be¬
schriebenen Annahmen eine bandförmige Struktur auf (Bild 5.1).
Die Anzahl Koeffizienten einer Zeile bis zum letzten Term
ungleich Null variiert für jede Zeile. Für die Vorbereitung
der Blöcke der globalen Steifigkeitsmatrix wird der maximale
Wert dieser Anzahl Koeffizienten (Bandbreite NK) verwendet.
Die Bandbreite NK ist eine vom berechneten Problem abhängige
aber vom verfügbaren Speicherplatz unabhängige Grösse. Die
Anzahl Zeilen NZ der Blöcke wird so bestimmt, dass im Speicher¬
platz der Rechenanlage zwei Blöcke von [K] und der entsprechen¬
den globalen Belastungsmatrix |pj während der Lösung des
Gleichungssystems Platz haben. Die maximale Grösse des Problems
ist praktisch nicht von der Bandbreite der Matrix [K] be¬
stimmt. Die folgenden Angaben veranschaulichen die Beziehung
zwischen Bandbreite NK und Anzahl Zeilen eines Blockes NZ für
eine Anzahl von 40000 Speicherplätzen für zwei Blöcke von [K].
Falls:
NK = NZ
NK = 5-NZ
NK = 10-NZ
2-NKz = 40000 ; NK £ 140
2/5-NK2 = 40000 ; NK = 316
2/10-NK2 = 40000 ; NK = 447

-64-
Die Bandbreite ist eine Funktion der Anzahl Elemente in einer
Kolonne (Abschnitt 4.2). Für die Rippenplatten sind pro Knoten
zwölf Verformungen vorhanden. Die Bandbreite ist für NE Vier¬
eckelemente in der Kolonne:
NK =(NE+3)- 12
Für die drei oben angegebenen NK kann man die Anzahl Viereck¬
elemente in der Kolonne zurückrechnen.
NK = 140 ; NE = 8
NK = 316 ; NE = 23
NK = 447 ; NE = 34
Die maximale Grösse des Problems ist folglich eher von der
wirtschaftlich maximal zumutbaren Rechenzeit bestimmt. Die
Lösung eines Gleichungssystems von 1980 Gleichungen und einer
maximalen Bandbreite NK von 156 benötigte auf der CDC-6500
Rechenanlage eine Rechenzeit (CP-Zeit) von ca. 300 Sekunden.
Bild 5.2 zeigt die Zonen der globalen Steifigkeitsmatrix, in
welchen die Koeffizienten der Steifigkeitsmatrizen des Platten-
und Scheibenelementes "I" einer aus vier Vierecken gebildeten
Rippenplatte addiert werden. Die Zonen der Koeffizienten der
Steifigkeitsmatrizen der Balkenelemente unten und links des
Viereckes "I" sind durch zusätzliche Bezeichnungen angegeben.
Das Bild 5.2 zeigt einige wichtige Merkmale der globalen
Steifigkeitsmatrix [K]:
-65-
a) Die globale Numerierung der Verformungsparameter
und die entsprechende Bandbreite NK.
b) Die Reihenfolge der Platten- und Scheibenverformungs¬
parameter.
c) Die Zonen der Platten- und Scheibenelementsteifigkeits¬
koeffizienten.
d) Die von den exzentrischen Balkenelementen besetzten
Zonen und deren Koppelung mit den Platten- und
Scheibenverformungen.
e) Die drei Hauptzonen der Speicherung der Steifigkeits¬
koeffizienten entsprechend den Knoten links und rechts
der Kolonne.
f) Die effektive Variation der Bandbreite.
Das Bild 5.3 zeigt die globale Steifigkeitsmatrix der Rippen¬
platte des Bildes 5.2 mit allen vier Platten- und Scheiben¬
elementen vor der Addition der Balkensteifigkeitskoeffizienten.
Man sieht deutlich die Variation der Bandbreite für jede Zeile,
auch wenn die Anzahl Elemente in jeder Kolonne konstant bleibt.
Diese Eigenart wurde für die Auflösung des Gleichungssystems
mit einem speziell programmierten Cholesky-Verfahren berück¬
sichtigt. In diesem Algorithmus ist es möglich, die globale
Steifigkeitsmatrix in kompakten Blöcken mit variablen Band¬
breiten zu speichern (Kapitel 8).

-66-
6. LASTFAELLE
Alle angegebenen Belastungsfälle werden gemeinsam behandelt.
Die möglichen Belastungen sind im Abschnitt 4.3 angegeben.
Die konzentrierten Belastungen werden direkt zu den ent¬
sprechenden Zeilen der globalen Belastungsvektoren addiert.
Für die elementweise gleichmässige Belastung senkrecht zur
Plattenebene werden die bei der Berechnung der Elementsteifig¬
keitsmatrizen abgeleiteten, "konsistenten" Lastvektoren für
eine Einheitsbelastung gebraucht. Die "konsistenten" Last¬
vektoren werden mit dem effektiven Wert der Belastung mul¬
tipliziert und zur globalen Belastungsmatrix addiert. Die
Elementrandlasten werden auch durch "konsistente" Knoten¬
lasten an den zwei Knoten am Ende der Seite ersetzt.
Die Vorspannung wird analog zum STRESS-Programm [33] durch
Ersatzlasten behandelt. Für die Eingabe der Vorspannung
(Anhang I) werden die Vorspannkraft V und die Exzentrizi¬
täten senkrecht zur Plattenebene am Anfang EAZ, in der Mitte
EMZ und am Ende EEZ der Elementseite benötigt. Die Ersatz¬
lasten sind konzentrierte Kräfte am Anfang (A) und am Ende (E)
der Seite des Elementes:
a) Normalkraft in Seitenrichtung: i V
(nur für die Rippenplatte)
b) Querkraft senkrecht zur Plattenmittelebene:
In (A) : (V/L)-(4-EMZ-3-EAZ-EEZ)
In (E) : (V/L)-(4-EMZ-3-EEZ-EAZ)
L ist die Seitenlänge zwischen (A) und (E).

¦67-
c) Konzentrierte Momente:
In (A) : V-EAZ
In (E) : -V-EEZ
d) Gleichmässig verteilte Linienlast senkrecht
zu Plattenmittelebene:
pAE= (4-V/L2HEAZ-2-EMZ+EEZ)
Zu dieser gleichmässig verteilten Belastung werden noch
die "konsistenten" Knotenlasten am Anfang (A) und am
Ende (E) der Seite des Elementes bestimmt.
Nun folgen generelle Betrachtungen für die Berechnung von
Einflussflächen. Die Grundgleichung (56) ist:
[K]-{f'} = {P} oder {f}=[K]H. {P}
|eajsei der Einflussvektor für irgendeine Spannungs- oder
Verformungskomponente O" :
a={ea}<.{p} <")
CTkann aus dem Lösungsvektor If j durch den Spannungsvektor
jso-j berechnet werden:

-68-
Durch Einsetzung der Grundgleichung folgt:
-W-[Kr-{P}={e.}'-{P}
Weil: [K]H = (LK]-1)* folgt:
•jeo-ferhält man aus der Lösung des Gleichungssystems:
[K] • {e^} = {so-} w
In unserem Fall ist der Vektor {So-j für die Berechnung der
Momenteneinflussflächen sehr einfach, weil die Krümmungen
als Verformungsparameter vorhanden sind. Die allgemeine
Ableitung der Spannungsmatrix [s] wurde mit Gleichung (16)
schon angegeben. In der Literatur findet man verschiedene
Publikationen und Tabellenwerke über die Berechnung von Ein¬
flussflächen von Platten: Pucher [54], Rüsch [52], HanuSka
und Balas [10], Kawai und Thürlimann [60], Riehle und Stein
[53]. Pfaffinger [25] gibt auch einige Beispiele von sehr
allgemeinen, mit verbesserten Differenzengleichungen ge¬
rechneten Einflussflächen an. Eine direkte Berechnung von
Einflussflächen mit der Methode der endlichen Elemente ist
aber dem Autor nicht bekannt.
Die Behandlung von vorgeschriebenen Auflagerverschiebungen
wird im folgenden Kapitel "Randbedingungen" näher beschrieben.

-69-
7. RANDBEDINGUNGEN
Die Programmeingabe (Anhang I) ermöglicht die Nullsetzung
eines beliebigen Verformungsparameters. Die Standardrand¬
bedingungen (einfache Auflagerung (Linienauflagerung),
Linieneinspannung, Liniensymmetrie) verlangen die Nullsetzung
verschiedener Verformungsparameter. Falls diese Linienrand¬
bedingungen gegenüber dem globalen Koordinatensystem gedreht
sind, werden die dem gewählten Knoten entsprechenden Zeilen
und Kolonnen der globalen Steifigkeitsmatrix [K] (Bild 7.2)
und die Zeilen des Belastungsvektors {p} durch Vor- bzw. Nach¬
multiplikation mit "Rotationsmatrizen" transformiert. Das
Bild 7.1 zeigt die Drehung des Koordinatensystems. Die Drehung
im Gegenuhrzeigersinn ist als positiv angenommen. Es sei
c = cos(oc) und s ¦ sin(a). Für die Rotation der Verformungs¬
parameter gelten die folgenden "Rotationsmatrizen":
W
W',P
W,n
W.PP
Wnn
W,np
10 0 0 0
0 C -S 0 0
0
0
0 S C 0 0 0
0 0 0 Cz S2 -2sc
0 0 0 S2 C2 2sc
0 0 0 SC "SC (C2~S2)
W
W•X
w.y
W,xx
W,yy
W;xy
(61)

-70-
J,P
7
ÜJ
s
0
0
0
0
C
0
0
0
0
s
2 sc
0
0
s2
c2
¦sc
0
0
-sc
0
0
0
CS 0
(C2-S2) 0
0 1
u,x
v,y
7
Die Nullsetzung oder die elastische Einspannung einer Ver¬
formung erfolgt programmtechnisch durch Addition eines Stei-
figkeitskoeffizienten (Kraft für eine Einheitsverformung) zum
Diagonalelement der entsprechenden Zeile der globalen Steifig¬
keitsmatrix. Bei der Nullsetzung wird ein sehr grosser Stei-
figkeitskoeffizient (10 ) eingeführt. Dies entspricht der
Einführung einer, im Vergleich zur Steifigkeit des Tragwerkes,
sehr steifen Feder. Diese Addition bringt keine numerischen
Schwierigkeiten mit sich. Diese Behandlung der Randbedingungen
erlaubt jedoch die Berechnung der konzentrierten Auflager-
kräfte. Diese Art der Behandlung der Randbedingungen ent¬
spricht einer Elimination der entsprechenden Gleichungen und
Variablen ohne an der Struktur der globalen Steifigkeitsmatrix
etwas zu ändern. Die Kondition der Matrix wird damit verbessert.
Diese Behandlung der Matrix [K] ist nicht zu verwechseln mit
einer Matrix [K] ,die aus einem Tragwerk entsteht, welches sehr
grosse Aenderungen in seiner Steifigkeit aufweist (z.B. Zonen
mit kleinen Plattendicken, kombiniert mit Zonen mit viel grösse¬
ren Plattendicken)[63].

-71-
Die Grundgleichung (56) sei für die Zeile i nochmals ge¬
schrieben:
f? =<K71>« {P} (63)
Falls diese Zeile durch Addition einer Federkonstante (Kraft
für eine Einheitsverformung) c geändert worden ist, folgt:
f^ = R/C (64)
wobei R die konzentrierte Federkraft bedeutet und wie folgt
bestimmt wird:
R = C • f9| (65)
So werden z.B. konzentrierte Auflagerkräfte, Einspannmomente
und Drillungsmomente berechnet.
Die Eingabe von festen Verschiebungen ist möglich (Anhang I).
Falls infolge der angenommenen Randbedingungen, entsprechend
dem gewählten Verformungsparameter, ein Steifigkeitskoeffizient
s zum Diagonalelement der globalen Steifigkeitsmatrix [k] addiert
wird, kann man durch einen Lastkoeffizient Pj =S • 8j (wobei 8j
die gewünschte Verformung ist) die vorgeschriebene Auflagerver¬
schiebung berücksichtigen.

-72-
8. LOESUNG DES GLEICHUNGSSYSTEMS
Die für die Lösung des Gleichungssystems benötigte Rechenzeit
stellt für die meisten Programme einen beträchtlichen Anteil
der gesamten Rechenzeit dar. Für Probleme mittlerer Grösse
(ca. 1000 Gleichungen und eine Bandbreite von ca. 100) liegt
dieser Anteil bei ca. 80 %. Deswegen wurde der Lösung des
Gleichungssystems grosse Aufmerksamkeit geschenkt. Zwei Lö¬
sungsprogramme wurden verwendet. Das erste Programm wurde von
Anderheggen [32] beschrieben und programmiert und arbeitet
nach dem Gauss'sehen Eliminationsverfahren. Das zweite Pro¬
gramm von Mazzario [48] basiert auf dem Cholesky-Verfahren
und führt zu wesentlichen Zeitersparnissen gegenüber dem
ersten. Die Rechenzeitersparnisse (CP-Zeit) liegen bei 40 %
und werden im Bild 8.1 für eine Reihe von Beispielen zusammen¬
gestellt .
Für die folgenden Betrachtungen wird die Gleichung (56) anders
geschrieben:
L JlMGLxNGL L JNGLxNBEL L JNGLxNBEL
wobei [A] die symmetrische bandförmige Koeffizientenmatrix
(NGL = Anzahl Gleichungen), [X] die Matrix der unbekannten
Lösungsvektoren (NBEL = Anzahl Belastungsfälle) und [B] die
Matrix der Belastungsvektoren darstellt.
8.1 Gauss'sches Eliminationsverfahren
Die symmetrische Matrix [A] kann als Produkt folgender Ma¬
trizen dargestellt werden:

-73-
[a]=[l]-[d].[l]'
[L] ist eine Linksdreiecksmatrix [ll] mit lauter Einsen in
der Diagonale. [D] ist eine Diagonalmatrix, deren Elemente
die Pivot-Elemente des Gauss'sehen Algorithmus darstellen.
[R] = [D] •[!_]' C)
ist eine Rechtsdreiecksmatrix, deren Diagonalelemente die
Pivot-Elemente des Gauss'sehen Algorithmus sind.
Das Gleichungssystem (66) kann folgendermassen geschrieben
werden:
[l] -[r]-[x]-[b] r ° (69)
Zur Bildung der Lösungsmatrix [X] sind zwei Schritte not¬
wendig:
a) Vorwärtselimination zur Bildung von [R] und [L] . [B] .
Die folgende Gleichung gilt:
[R].[X]-[L]-'.[B] = 0
Im Programm von Anderheggen ist auch die Speicherung von
[R] für spätere Berechnungen vorgesehen. In diesem Fall
([R] bekannt) reduziert sich dieser Schritt zur Bestimmung
von [L]"1. [B]. Wobei:
[L]'=M>]

-74-
Weil [R] die gleiche Bandstruktur hat wie [A], kann [R] auch
anstelle von [A] gespeichert werden.
b) Rückwärtselimination zur Bildung des Lösungsvektors [X]:
[x] = [R]-'.[Lr-[B]
Im Programm sind die [Aj- und [ß]- Matrizen in Blöcke kon¬
stanter Anzahl Zeilen NZ unterteilt. Die Breite NK der Blöcke
der bandförmigen [A]-Matrix ist konstant. Im Speicher der
Rechenanlage werden gleichzeitig nur zwei Blöcke von [A] und
[B] benötigt.
NZ kann auch kleiner als NK sein. Dies erlaubt die Lösung von
grossen Gleichungssystemen mit einem beschränkten Speicher¬
platz (z.B. mit dem auf der CONTROL DATA 6500 Anlage maximal
zur Verfügung stehenden Speicherplatz von ca. 30000 Wörtern).
Zu beachten ist aber, dass die Rechenzeit für die Einlesung
der Blöcke im Speicher zunimmt, falls NZ<NK-1 ist. In diesem
Fall erstreckt sich der Einfluss jedes Eliminationsschrittes
auf mehrere Blöcke der globalen Steifigkeitsmatrix, so dass
mehr als zwei Blöcke im Speicher nacheinander geladen und
transformiert werden müssen.
8.2 Cholesky-Verfahren
Das Cholesky-Verfahren basiert auf der folgenden Zerlegung
der Koeffizientenmatrix der Gleichung (66):
[A] = [R*] • [R#]f <73)

-75-
[R ] ist eine Rechtsdreiecksmatrix. Diese Zerlegung ist anders
als die normalerweise in der Literatur [11] angegebene:
[A] = [L*]-[L*]f C74D
Durch Einsetzung von Gleichung (73) in Gleichung (66) folgt:
[R*]-[R*]' • [X]= [B] (">
Zuerst wird [R*] bestimmt.
Die Auflösung des Gleichungssystems erfolgt in zwei Schritten.
Wenn die Gleichung (75) wie folgt geschrieben wird:
[r*] -[y] = [b] <76a>
ist der erste Schritt:
[y] • [r-]"1- [b] l»M
und weil:
[Y]= [R#](-[X] (77a)
folgt der zweite Schritt als:
[X].([R']T -[Y]
Diese zwei Schritte sind einfache Vor- und Rückwärtseliminationen.

-76-
Das Programm von Mazzario [48] speichert die Matrix [A] zei¬
lenweise nur bis zum letzten, nicht verschwindenden Term der
Zeile. Diese komprimierte Speicherung ermöglicht grosse Platz¬
ersparnisse, speziell im Falle von stark variierenden Band¬
breiten der globalen Steifigkeitsmatrix [K]. Aus diesem Grunde
verkleinert sich die Anzahl Blöcke der globalen Steifigkeits¬
matrix und die Anzahl notwendiger Ein- und Ausgabeoperationen.
Das bedeutet kleinere Ein- und Ausgaberechenzeit.

-77-
9. NUMERISCHE BEISPIELE
9.1 Platte
9.1.1 Vergleiche mit analytischen Lösungen für
quadratische und schiefe Platten
Für diese Untersuchungen wurden sowohl die VKPL28- als auch
die VKPL24-Plattenelemente [32] verwendet. Das Viereckelement
mit 28 Verformungsparametern besitzt noch die vier Normal¬
verdrehungen in der Mitte der Seiten. Beim Element VKPL24
sind die vier Normalverdrehungen eliminiert. Das Element
VKPL28 gibt selbstverständlich für die gleiche Maschenkonfi¬
guration etwas bessere Resultate (Abschnitt 2.5), aber mit
einer beträchtlichen Vergrösserung der Rechenzeit. Eine
erste Serie von Vergleichen betrifft quadratische, einfach
gelagerte oder eingespannte Platten mit verschiedenen Element¬
unterteilungen. Als Belastung ist eine Einzellast in der
Plattenmitte und eine gleichmässig verteilte Belastung unter¬
sucht worden. Aus Symmetriegründen wird ein Viertel der Platte
mit den entsprechenden Randbedingungen nach Bild 9.1 benutzt.
Die Tabelle 9.1.1 stellt die Resultate der durchgerechneten
Beispiele, zusammen mit den entsprechenden analytisch gerech¬
neten Werten [6], dar. Ebenso wurden einfach gelagerte und
eingespannte Platten mit verschiedenen Winkeln der Schiefe
und verschiedenen Elementunterteilungen berechnet. Die in
Tabelle 9.1.2 (a, b) eingetragenen Werte wurden in der Mitte
des gleichseitigen Viereckes (Seitenlänge a) und mit einer
Poissons'sehen Zahl V = 0.3 berechnet. Das Koordinaten¬
system entspricht dem des Bildes 9.6 und die Elementunter¬
teilung erfolgt parallel zu den Seiten (z.B. Bild 9.10,
Fall 3). Analytische Lösungen des Problems der schiefen
Platte sind aus den Arbeiten von Favre und Lardy [50, 51]bekannt. Morley [9], Mehmel [61], Hanuska [10], Rüsch [52],

-78-
Newmark und Jensen [19, 41, 42j untersuchten schiefe Platten
sowohl mit Differenzenmethoden als auch mit Modellmessungen.
Genaue numerische Werte sind aber selten angegeben. Deswegen
sind in der Tabelle 9.1.2 (a, b) zum Vergleich nur Werte ein¬
getragen, die aus der Verwendung von anderen endlichen Ele¬
menten (Argyris [30], Anderheggen [59]) entstanden sind. Die
Werte von Anderheggen [59] sind für eine Elementunterteilung
8 mal 8 gerechnet worden, wobei Gleichgewichtselemente, ba¬
sierend auf einem Spannungsansatz, verwendet worden sind.
Die Werte der Momente unter der Einzellast sind zur Beur¬
teilung der Aenderung derselben für verschiedene Element¬
unterteilungen eingetragen worden. Diese Momente sind für
die analytische Lösung unendlich gross.
9.1.2 Stützeneinbau
Das Bild 9.2 zeigt ein Viertel einer Platte mit einer Stütze
in der Mitte. Verschiedene Elementunterteilungen wurden un¬
tersucht. Für die Berücksichtigung der Stütze ist das ela¬
stisch aufliegende Viereckelement VS verwendet worden. Das
Beispiel wurde auch von Anderheggen [32] mit einer Unter¬
teilung 7 mal 7 nach Bild 9.2 und mit einer Fourieranalyse
(Programm PLATE-FOURIER von Pfaffinger [40]) berechnet. Die
aus VKPL24-Elementen bestehende Platte wurde für eine gleich¬
mässige Belastung berechnet. Damit ein Vergleich mit den
Resultaten des PLATE-FOURIER-Programmes möglich ist, wurde
die Federkonstante des VS-Elementes so gewählt, dass die
Durchbiegung in der Elementmitte gleich Null wird. Die Ta¬
belle 9.1.3 zeigt die Resultate für die verschiedenen Unter¬
teilungen und die Konvergenz der Verformungen und der Momente
zu den analytischen Werten.
-79-
9.2 Rippenplatten
Verschiedene Rippenplatten wurden berechnet und die Resultate
mit denen von Mehrain [22] verglichen. Der zitierte Autor un¬
tersuchte Rippenplatten mit der Methode der endlichen Elemente
und führte parallel dazu Modellmessungen aus. Die rechteckige
Rippenplatte des Bildes 9.3 wurde mit verschiedenen Element¬
unterteilungen untersucht. Schiefe Rippenplatten, in einer
oder beiden Richtungen verstärkt, nach Bild 9.10, wurden mit
verschiedenen Randbedingungen, Belastungen und Elementunter¬
teilungen berechnet.
9.2.1 Rechteckige Rippenplatte
Das Bild 9.3 zeigt die Abmessungen und die von Mehrain [22]
gewählten Elementunterteilungen für ein Viertel der Rippen¬
platte. Belastung und Materialeigenschaften sind im selben
Bild aufgetragen. Aus Symmetriegründen konnte die Berechnung
auf ein Viertel der Platte beschränkt werden. Bild 9.4 zeigt
die Konvergenz der Durchbiegung unter dem Belastungspunkt
und im Bild 9.5 die Biegungsmomentverteilung in der Platte.
Im Bild 9.4 sind verschiedene Konvergenzkurven eingezeichnet.
Sie entsprechen verschiedenen von Mehrain [22] entwickelten
Programmen. Bei den drei aufgezeichneten Varianten des COMDEK-
Programmes wurden Balken verwendet, die aufgrund von ver¬
schiedenen Verschiebungsansätzen entwickelt wurden. Die besten
Resultate von Mehrain mit der Methode der endlichen Elemente
liefert das Programm REFDECK. MULTPL ist ein Programm für
Faltwerke, das Mehrain als Vergleichsbasis benutzt hat. Das
COMDECK-Programm benützt als Verformungsparameter an den
Ecken der Vierecke die vertikale Verschiebung, die zwei Ver¬
drehungen und die zwei Verschiebungen in der Ebene der Platte.

-80-
Das REFDECK-Programm verwendet Vierecke, die neben den Ver¬
formungsparametern der Elemente des COMDEK-Programmes auch
die Verschiebung in Seitenrichtung in der Mitte der vier
Seiten des Viereckes besitzen. Im Balkenelement dieses Pro¬
grammes ist zusätzlich zu den obenerwähnten Verformungs¬
parametern der Ecken des Viereckes auch der Verschiebungs¬
parameter in der Seitenmitte entlang der Seite des Viereckes
vorhanden. Der Balken ist mit den Viereckverformungen voll
kompatibel.
9.2.2 Schiefe Rippenplatte
Eine Serie von 14 Beispielen nach Bild 9.6 und 9.10 aus
Mehrain [22] wurde mit dem FEAPS-Programm nachgerechnet. Es
handelt sich um schiefe, in einer oder zwei Richtungen ver¬
steifte Platten. Die Rippenplatte des Bildes 9.6 ist in A
und B mit Einzellasten belastet. Verschiedene Unterteilungen
für die Platten- und Scheibenvierecke (4 mal 4, 8 mal 8,
12 mal 12) wurden angenommen. Die Tabelle 9.1.4 fasst die
Rechenzeit des zentralen Rechenwerkes (CP-Zeit) für die
untersuchten Elementunterteilungen zusammen. Mehrain unter¬
suchte die Rippenplatte mit dem COMDEK-Programm (Viereck-
Unterteilung 12 mal 12 und 845 Gleichungen) und mit dem
REFDEK-Programm (Viereekunterteilung 8 mal 8 und 549 Gleichun¬
gen). Die Bilder 9.8 und 9.9 zeigen die Schnittkräfte N und
M für einige Schnitte durch die Rippenplatte. Die Werte der
Schnittkräfte von Mehrain sind nicht genau in der Mitte der
Platte, was auch die Abweichung der FEAPS-Kurven teilweise
erklären kann. Für die anderen Beispiele des Bildes 9.10
wurde eine Viereckelementunterteilung 8 mal 8 (Fall 1 bis 8)
und 12 mal 6 für die Querrichtung (Fälle 9 bis 12) vorge¬
nommen. Die vorher beschriebenen Berechnungen für das Beispiel
-81-
nach Bild 9.6 zeigen eine genügende Genauigkeit für eine
8 mal 8 Unterteilung. Die Rippenplatten der ersten Serie (Fall
1 bis 8) weisen dieselbe Geometrie und dieselben Materialei¬
genschaften des Beispieles des Bildes 9.6 auf. Die Aenderungen
betreffen nur die Lage der exzentrischen Balken, die Auflager¬
bedingungen und den Winkel der Schiefe. Die Balken in Quer¬
richtung haben dieselben Abmessungen wie diejenigen in Längs¬
richtung. Bei der zweiten Serie von Rippenplatten (Fälle 9
bis 12) sind die Abmessungen zwischen den einfach gelagerten
Seiten dieselben wie bei der ersten Serie. Die Abmessung in
y-Richtung der Rippenplatten der zweiten Serie (Bild 9.6)
ist aber die Hälfte von der Abmessung der ersten Serie. Das
Bild 9.7 zeigt die Lage der konzentrierten Lasten auf. Die
Bilder 9.11 bis 9.22 stellen die Durchbiegungen dar, die man
mit dem FEAPS- und COMDEK-Programm mit denselben Viereck¬
unterteilungen erhält.
9.3 Schiefe Plattenbrücke
Eine in Wirklichkeit gebaute, schiefe Plattenbrücke wurde an
einem Modell untersucht. Es handelt sich um eine punktförmig
gelagerte zweifeldrige Platte, deren spitzer Winkel 20 Grad
aufweist. Die Abmessungen sind im Bild 9.23 angegeben. Die
Platte ist 60 cm dick und isotrop (Elastizitätsmodul E =
300000 kg/cm2 und Poissons'sehe Zahl V =0.3). Die Platte
wurde mit einer ständigen Last von 2 t/m2 belastet. Dieselbe
Platte wurde mit dem FEAPS-Programm berechnet. Zur Verein¬
fachung der Einteilung wurden die Teile der Brücke über den
Widerlageraxen bei den spitzen Ecken nicht berücksichtigt.
Diese Teile entsprechen einem Gewicht von ca. 35 t, das im
Bild 9.24 für die Auflagerkräfte bei den Stellen 00, Ol, 37,
38 noch zu den Werten in den Klammern zu addieren wäre.

-82-
Die Unterteilung nach Bild 9.23 (14 Kolonnen von Elementen
und 10 Elemente pro Kolonne) führt zu einer genügenden Ge¬
nauigkeit. Im Bild 9.23 sind die aus FEAPS erhaltenen Bie¬
gungsmomente M und M für einige Schnitte eingetragen.x y
Gleichzeitig wurden auch die Werte aus der Modellmessung
angegeben. Im Bild 9.24 sind die Auflagerkräfte aus der Mo¬
dellmessung und aus der Berechnung mit dem FEAPS-Programm
eingetragen. Die verwendete Plattenunterteilung erzeugt ein
Gleichungssystem von 990 Gleichungen und eine Bandbreite von
78 Verformungen und Schnittkräfte werden in 305 Punkten ge¬
liefert. Die Eingabe braucht 62 Karten und die Rechenzeit
ist ca. eineinhalb Minuten. Die Symmetrie der Auflagerkräfte
bezüglich des Zentrums der Platte stellt ein Mass für die
numerische Genauigkeit dar.

QUADRATISCHE
PLATTE
NACH
BILD
9.1
(ir=0.3)
5! ODm r~
r-
m CO
EINFACH
GELAGERTE
PLATTE
EINGESPANNTE
PLATTE
VKPL28-
Viereckelemente
[32]
VKPL24-Viereckelemente
[32]
VKPL28-Viereckelemente[3
2]
"Mitte
wPMitte
MMit
teMMitte
wMitte
wMitte
p
M|viitte
^Mitte
wMitte
«Mit
teMMitte
MMit
te
c 3 CO öT E"
X
0.0115520004063
(0.33)
OJ0484
00115520004063
(0.33)
0.0481
OJ00557
0.001265
(0.28)
0.0240
ro
X IN}
QD11588
QD04062
(0.4
0)0.0479
Q011588
0004062
(0.40)
0.0480
00055990001265
(0.35)
00230
X
0.0115980.004062
(0.47)
0.0479
0.011597
0.004062
(0.47)
0.0479
0005609Q0O1265
(0.4
2)OJ0229
Timoshenko
[6]
a01160
0J00406
CO
0.0479
0.01160
0.00406
00
0.0479
0.00560000126
CO
0.0231
Faktor
Pa2
D
pa«
DD
DP
a2
D
pa4
DD
DP
a2
D
pa«
DD
D

VKPL28
EINFACH
GELAGERTE
SCHIEFE
PLATTE
^=0.3
(Werte
in
Plattenmitte)
COo n>
'
CD
Unter¬teilung
EINZELLAST
IN
MITTE
P=:
1GLEICHMÄSSIG
VERTEILTEBELASTUNG
P=1
>—i
II > CTo Ed ii 31c ui
3- ö* D 1—i
< ii
O —\ «T
•<
H 3>
OD
m r~
r-m CO
rv>
o
wMitte
Mx,Mitte
My,M
itte
MXy,
Mrtt
eWMitte
MX,Mi1te
My.M
itte
Mxy,
Mitte
CT)
O0 13
2x2
8.827
3.160
3.328
1.406
2.493
3.443
3.942
4.322
4x4
8.955
3.865
4.019
1.333
2.527
3.518
3.992
4.106
8x8
9.010
4.586
4.739
1.318
2.543
3.538
4.006
4.049
2.56
QV]
cn o
2x2
5.770
2.813
3.205
1.961
1.181
1.968
2.835
4.336
4x4
6.020
3.584
3.938
1.767
1.234
2.171
2.954
3.915
8x8
6.152
4.328
4.672
1.719
1.265
2.239
2.998
3.793
1.34
[H]
1.299
[I]
Oo
2x2
2.605
2.206
2.908
2.028
3.020
5.784
1.452
2.522
4x4
2.886
3.031
3.713
1.968
3.335
8.110
1.641
2.396
8x8
3.039
3.837
4.466
1.817
3.538
9.335
1.689
2.182
407
[IV]
Faktor
10-*£
10"1
D10"1
D10
"1D
io-V
1Ö~2D
10"2D
10~3D
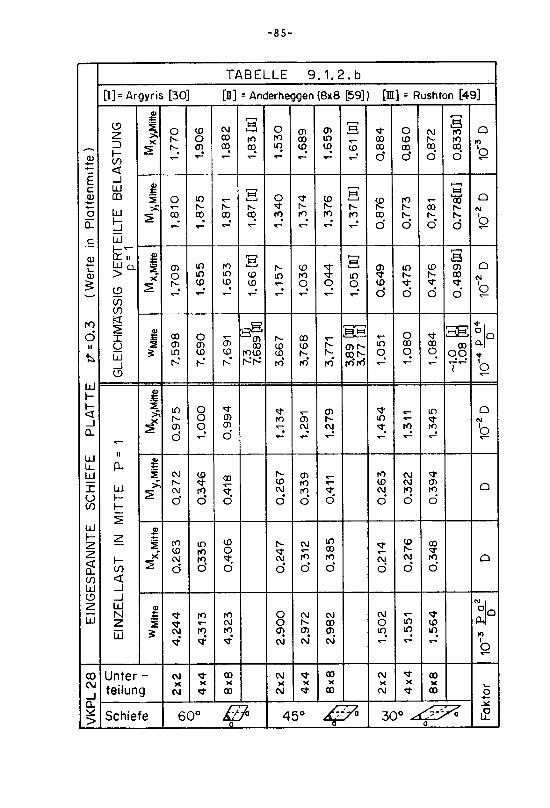
VKPL28
EINGESPANNTE
SCHIEFE
PLATTE
zf=0.3
(Werte
nPlattenmitte)
COo =r
Unter -
teilungEINZELLAST
IN
1 VIITTE
P-=
1GLEICHMÄSSIG
VERTEILTEBELASTUNG
p=1
II > fi n > 3 Q.
n>—i
3"
a>
<Qo CD3 roX oo
11?
g H XIc tn3-
O 3 V ii£
> DD
m V r-
m CO
IV)
er
wMitte
MX,Mitte
My.Mit
teMx
y,Mi
tte
wMit
teMx,Mitte
My.M
itte
Mxy,
Mitte
CD
o0
2x2
4.244
0.263
0.272
0.975
7.598
1.709
1.810
1.770
4x4
4.313
0.335
0.346
1.000
7.690
1.655
1.875
1.906
8x8
4.323
0.406
0.418
0.994
7.691
1.653
1.871
1.882
7-3
[L
7.68900
1.66
[I]
1.87
[I]
1.83
[n]
Ol o "1
2x2
2.900
0.247
0.267
1.134
3.667
1.157
1.340
1.530
4x4
2.972
0.312
0.339
1.291
3.768
1.036
1.374
1.689
8x8
2.982
0.385
0.411
1.279
3.771
1.044
1.376
1.659
3.89
[1.
3.77
[I1.05
[I]
1.37[I]
1.61
tn]
OJ
o0
1
2x2
1.502
0.214
0.263
1.454
1.051
0.649
0.876
0.884
4x4
1.551
0.276
0.322
1.311
1.080
0.475
0.773
0.860
8x8
1.564
0.348
0.394
1.345
1.084
0.476
0.781
0.872
-1.0
1.08H
0.489QI]
0.778[H]
0.833&]
Faktor
10"^
DD
10~2D
io-V-
410
~2D
10~2
D10"3
D

D=
Plottensteifig-
keit
Verschieb¬
ung
in
WM
My/D
M2/D
M3/D
MyVD
Stützen
-
kraft
Anzahl
Gleich¬
ungen
Band¬
breite
CP-Zeit
(Sek
.)
AnalytischeWerte
(Pfa
ffmg
er[4
0])
71814.3
192.29
267.32
-755.0
-683.3
4689.58
Unterteilung
mit
VKPL24
(2x2)
96789.5
(213.01)
(189.63)
-920.32
-944.06
5100.56
54
30
7.2
(3x3)
76381.3
241.78
279.21
-809.29
-752.25
4802.96
96
36
8.4
(4x4)
73569.5
(188.06)
(266.15)
-777.05
-713.28
4734.98
150
42
10.4
(7x7)
72041.6
193.22
267.41
-758.17
-692.63
4696.17
348
60
22.7
Tabelle
9.1.3
:Platte
mit
Stütze
mit
verschiedenen
Unterteilungen
nach
Bild
9.2
(Werte
in
Klammern
sind
vom
nächstliegenden
Viereckmittelpunkt).
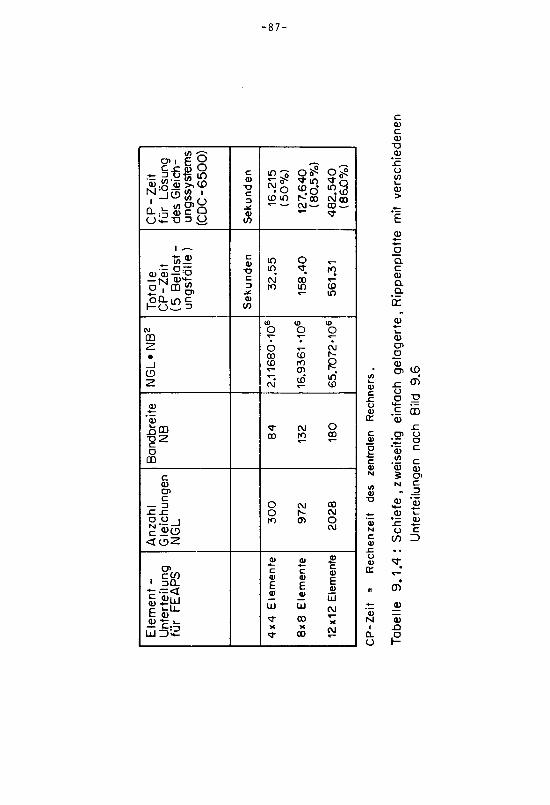
Element-
Unterteilung
fürFEAPS
Anzahl
Gleichungen
NGL
Bandbreite
NB
NGL»NB2
Totale
CP-Zeit
(5
Belast¬
ungsfälle
)
CP-Zeit
fürLösung
des
Gleich¬
ungssystems
(CDC-6500)
Sekunden
Sekunden
4x4
Elemente
8x8
Elemente
12x12Elemente
300
972
2028
84
132
180
2.11680-106
16.9361-106
65.7072-106
32.55
158.40
561.31
16.215
(50%)
127.640
(80.5%)
482.540
(86.0%)
CP-Zeit
Rechenzeit
des
zentralen
Rechners.
Tabelle
9.1.4:
Schiefe
,zwei
seit
igeinfach
gelagerte,Rippenplatte
mit
verschiedenen
Unte
rtei
lung
ennoch
Bild
9.6
ZUSAMMENFASSUNG
Die Methode der endlichen Elemente wird für die Berechnung
von dünnen, elastischen, isotropen oder orthotropen Platten
und Rippenplatten beliebiger Form, Auflagerung und Belastung
nach der Theorie 1. Ordnung verwendet. Ein entsprechendes
Programm (FEAPS: "Finite Element Analysis of Plate Systems")
wird für eine CDC-6500 Rechenanlage entwickelt.
Das Programm verwendet eine problemorientierte Eingabe, um
seine praktische Benützung zu vereinfachen. Die benützten
dreieckigen und viereckigen Platten- und Scheibenelemente,
sowie die Balkenelemente sind kinematisch kompatibel. Für
rippenlose Plattenberechnung ohne Scheibenwirkung verwendet
FEAPS nur Plattenelemente. Die Rippenplatten werden durch
Schalenelemente erfasst, die aus der Zusammensetzung eines
Platten- und eines Scheibenelementes, sowie aus zur Platten-
mittelebene exzentrischen Rippen, entstanden sind. Die ein¬
gesetzten Plattenelemente (DRPL18, VKPL24) sind Verschiebungs¬
elemente, deren Verschiebungsansatz ein Polynom fünften Grades
ist. Für die Scheibenelemente (DRSC18, VKSC24) werden für die
Verschiebungen in x- und y-Richtung Polynomansätze dritten
Grades verwendet. Die exzentrischen Balkenelemente entstehen
aus einem Verschiebungsansatz fünften Grades für die Ver¬
schiebung senkrecht zur Platte und dritten Grades für die
Verschiebung in Längsrichtung.
Die Plattenelemente und die Scheibenelemente haben sechs
Verformungsparameter pro Knoten. Die Plattenelemente eine
Verschiebung, zwei Verdrehungen und drei Krümmungen, und
die Scheibenelemente zwei Verschiebungen, zwei Dehnungen,
eine Schiebung in der Ebene der Scheibe und eine Rotation
um eine Senkrechte zur Scheibe.

-89-
Die viereckigen Elemente entstehen aus der "Kondensation"
von vier Dreiecken. Besondere, elastisch gestützte Vierecke
für die Behandlung von Stützen und Fundamentplatten sind
im Programm eingebaut.
Es wird eine elementorientierte Eingabe und eine kolonnen¬
weise festgelegte Elementanordnung und Knotennumerierung
gewählt. Dies vereinfacht die Eingabe und reduziert die
Gesamtrechenzeit, da schmale, bandförmige, symmetrische
Gleichungssysteme erzeugt werden. Das lineare Gleichungs¬
system wird mit zwei speziell programmierten Algorithmen
wahlweise gelöst (Gauss'sches Eliminationsverfahren oder
Choleskyverfahren). Bei der Cholesky-Zerlegung wird bei der
Speicherung der Koeffizientenmatrix die variable Bandbreite
berücksichtigt. Die kompakte Speicherungsart dieses Algo¬
rithmus erlaubt wesentliche Rechenzeitersparnisse.
Verschiedene analytisch und mit der Methode der endlichen
Elemente berechnete, aus der Literatur bekannte Platten und
Rippenplatten werden überprüft. Dabei wird festgestellt,
dass schon mit einer groben Unterteilung recht beachtliche
Resultate erzielt werden.

-90-
SUMMARY
The finite element method using a displacement model is
employed to analyse the elastic bending of plates and
eccentrically stiffened plates. For the stiffened plates
both the stiffnesses due to in-plane and to plate-bending
action for the plate and beam elements are taken into
aecount. A generei FORTRAN IV program for the CDC-6500-
Computer was developed.
The finite element used are the following:
1. Fully compatible triangulär and "Condensed"
quadrilateral plate bending element with 18 and 24
degrees of freedom (DRPL18, VKPL24).
2. Fully compatible triangulär and "Condensed"
quadrilateral plane stress element with 18 and 24
degrees of freedom (DRSC18, VKSC24).
3. Eccentric fully compatible beam elements with
24 degrees of freedom (BAL24).
The plate bending element ensures displacement and slope
compatibility along the edges of adjacent elements.
Six parameter are introduced at each corner: the deflection,
two rotations and three curvatures. This element assumes as
a displacement field a complete polynomial of fifth degree
in x and y.
The plane stress element is based on a complete third degree
polynomial in x and y for the displacements u and v in
x- and y-direction. Six parameters are introduced at each
corner: two displacements, three strains and a rotation.
-91-
Quadrilateral elements are assembled by four triangulär
elements. The internal degrees of freedom are eliminated
by static condensation. Special quadrilateral elements
for the traitment of columns and elastic foundations are
also available.
An element-oriented input combined with columnwise dis-
position of the elements characterises the program. The
geometry is specified only for element types, assuming that
the whole structure is built up by a redueed number of element
types.
The direct stiffness method is used to assemble the global
stiffness and loading matrices.
The system of linear equations is solved by specially
programmed algorithms based on the Gauss-Elimination or
Cholesky-Method. The variable bandwidth of the global
stiffness matrice was taken into aecount by the programmed
Cholesky algorithm.
Several numerical Solutions are given showing good
correspondence with known analytical or experimental
results.
-92-
RESUME
On presente le calcul par la methode des elements finis
des plaques avec ou sans nervures de forme et de conditions
d'appui quelconques. Pour 1'idealisation de la plaque
nervurie, on utilise d'une part des Clements de plaque et
de membrane superposes et d'autre part des elements de
barre.
On a d6veloppe pour l'ordinateur CDC 6500 un programme en
FORTRAN IV.
Differents types d'elements sont utilisis :
1. Elements de plaque completement compatibles,
triangulaires et quadrilateraux avec respectivement
18 et 24 degres de liberte (DRPL18, VKPL24).
2. Elements de membrane completement compatibles,
triangulaires et quadrilateraux avec respectivement
18 et 24 degres de liberte (DRSC18, VKSC24).
3. Elements de barre purement compatibles ä 24 degrSs
de liberte (BAL24).
L'element de plaque flSchie assure la continuite des deplace-
ments et des pentes entre les elements.
On a introduit ä ehaque angle 6 parametres: la fleche, deux
rotations et trois courboures.
Pour l'element de plaque on a adoptß un polynome de 5e degre
complet en x et y.

-93-
Pour 1'Clement de membrane on a adopt§ un polynome de 3e
degri complet en x et y pour les dSplacements u et v en
direction des axes x et y.
On a introduit ä ehaque angle les 6 parametres suivants:
2 deplacement, 3 dilatations et une rotation.
Les elements quadrilateraux sont formes par 4 Clements
triangulaires, avec Elimination par "condensation" des
degrSs de liberte1 internes.
On dispose encore d'Elements quadrilateraux pour le traite-
ment de colonnes et de fondation Slastiques.
Les donn§es du programme se basent sur la gesomgtrie et la
topologie des Clements qui sont groupSs en colonnes.
Pour assembler les matrices globales de rigidite et des
eharges, on utilise la methode des deformations en additionant
directement les rigidites des Clements.
Le Systeme d'equations lineaire est rSsolu par un algorythme
basS sur 1'elimination de Gauss ou par la m6thode de Cholesky.
Pour cette derniere, on a tenu compte de la largeur variable
de la bände de la matrice de rigiditß.
Pour Controller la bonne convergence des rSsultats, on a
calculö certains systemes, dont on trouve les Solutions
dans la littgrature.

-94-
3 analog zu 1
WlO,«iw10,y
194-24: w
Seite 1-r 3
analog zu
2t3
Seite 1t2 analog zu 2t3 2 analog zu 1
«1 ; w1)X; w1iyw1,»*iw1,yyi w1,xy
Bild 2.1: DRPL 45-Rattenelement
x.x.u
z,z ,w,w
Bild 2.2 : Exzentrisches Balkenelement

-95-
Koordinatensystem
x,y- Kartesisches Koordi-
natensystem (Index "k")
oc,/3- schiefes Koordinaten¬
system mit Dreieck-
koordinaten (Index"s")
Knotenpunktsystem
Verschiebungsvektoren6 Knoten
Knotenpunktsystem
Krümmungsvektoren10 Knoten
Bild 2.3 : Koordinatensysteme für die Steifigkeitsmatrix des dreieckigen
Plattenelemtes mit 21 Freiheitsgraden.

-96-
W:
Wi
y, i rw2
[7-/-12] N
w2,x
w2,yy
w2,y
«2,xy
\ri •6]fw,
"«1
W3,x w3,yl [3^^^^xx w3,yy w3,xyJ [13 18]
P* «l,x wi,:
LWl,xx Wtjry W|,:
? x
Bild 2.4.a: Plattenelement DRPL18 mit 18 Verschiebungsvariablen
w3 w3,x
W^ ^.xx
[19- -24](X2,y2) w2 w2,x
w2,y w2,xx
w4 w4>x
w4,y w4,xx
4,yy 4,xy,
W1 «1.x
w1,y «l.xx
_W)>yy W||Xy
Bild 2.4.b: Plattenelemente VKPL 24 mit 24 Verschiebungsvariablen
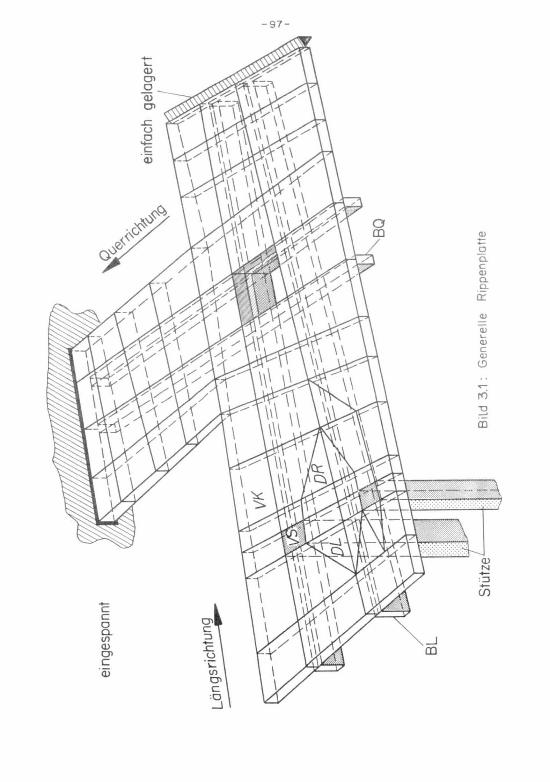
eing
espa
nnt
einfach
gelagert
Stütze
Bild
3.1:
Generelle
Rippenplatte
10
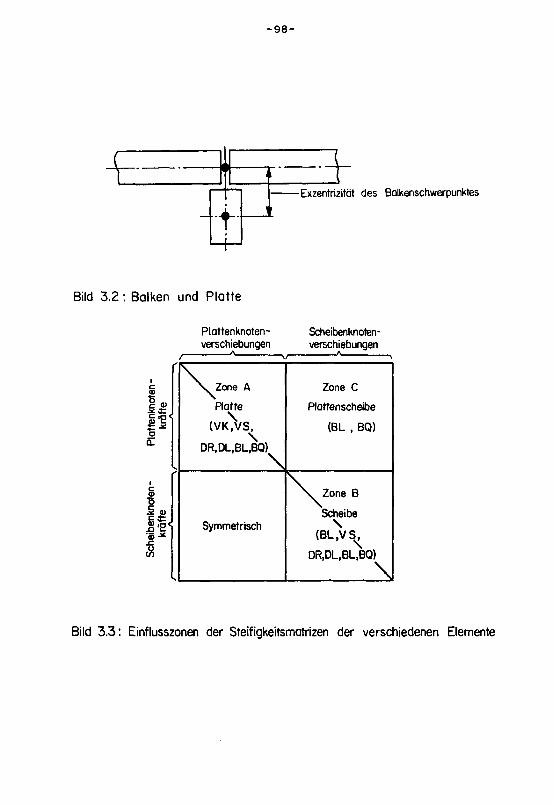
-98-
t
-Exzentrizität des Balkenschwerpunktes
Bild 3.2: Balken und Platte
a>
*-¦
o
a.
c
ct.
.c
ti
Plattenknoten-
verschiebungen
Scheibenknoten-
verschiebungen*
N. Zone A
Ratte
(VK.VS,
DR,DL,Bl_BQ)
Zone C
Plotfenscheibe
(BL , BQ)
Symmetrisch
\Zone B
Scheibe\
(BL.VS^DR.DL.BL.BQ)
\
Bild 3.3: Einflusszonen der Steifigkeitsmatnzen der verschiedenen Elemente

Beginn
Main
Overlay
1
Date
nein
gabe
Eing
abevon:
Parametern
Geometrie
Topo
logie
Randbeding¬
ungen
Belastungen
Overlay2
Berechnung
der
Element-
Steifigkeiten
und
Last-
vektoren
Overlay3
Zusammen
-
Stel
lung
der
glob
alen
Stei
figk
eits
-
matrix
Behandlung
der
Randbeding¬
ungen
Overlay4
Vorbereitung
der
Belastungs-
vektoren
Overlay5
Lösung
des
Gleichungs-
systems
Overlay6
Berechnung
der
Schnitt-
kräfte
und
Herausgabe
der
Resultate
(O
<0
Bild3.4:
Flussdiagramm
FEAPS-Programm

-100-
Speicherplatz CDC - 6500
Fix
für das
ganze
Programm
"Labeled Common Main"
Fixe Informationen : Problemparameter
[AnfangsodresserTgMatrizen im Speicher
Absolute Ocfaladressen
00 000
00 101
'Main" Hauptprogramm ¦• immer im
mit Hiifsroutmen
Blank Common ud.
Overlay 1,2
Programm
Dieser Teil des
Speicherplatzesvariert in der Länge
von Overlay zu
Overlay.
U( IA BEGIN ) Beginn der Speicherung der
verschiedenen Matrizen mit variablen
Dimensionen.
(Eingabeinformationen und Blöcke der
Steifigkeits- und Belastungsmatrizen )
Diese Informationen werden von
Overlay zu Overlay verschoben.
ca 024 000
"Adresse variert
mit den Overlays.
Gebrauchte Feldlänge
Bild 3.5: Speicherkonfiguration CDC-6500 mit FEAPS -Programm
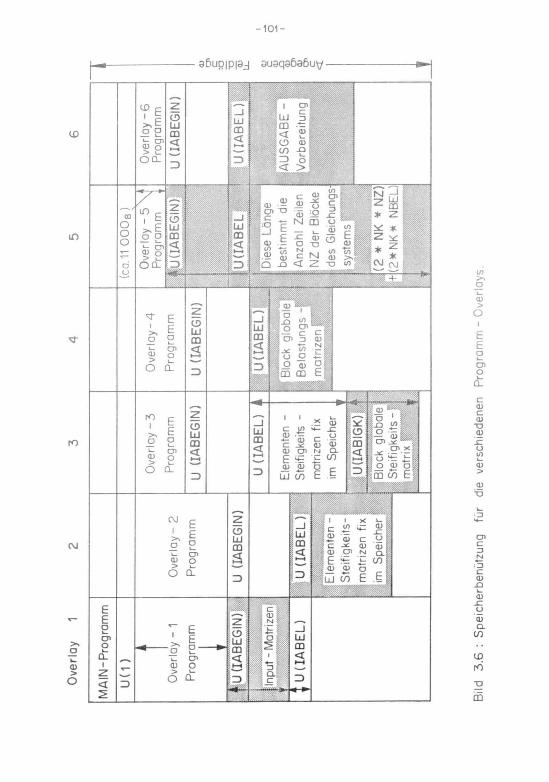
Over
lay
1
MAIN-Programm
U(1)
(ca.11OO08)
JOverlay-
1
Programm
Overlay-2
Programm
<lU(IABEGIN)
U(IABEGIN)
Input
-
Matrizen
!
U(IABEL)
UÜABEL]
'Elementen
-]ISteifig
keit
s-ä
|matrizen
fix
lim
Speicher!
Over
lay-3
Programm
Overlay-4
Programm
U(IABEGIN)
U(IABEGIN)
UÜABEL)
u
Elementen
-
Stei
figk
eits
-
matrizen
fix
im
Speich
er
sll(IABIGK);
iBIock
globale
|Ste
ifig
keit
s-f
i.matrixü
:U(IABEL);
JNmRBhHKMmIPLj
Block
glob
alef
Belastungs
matrizen
I
Over
lay-5
Programm
Over
lay-6
Programm
üluÜABEGIN)!
U(IABEGIN)
UÜABEL
[Diese
Länge
bestimmt
die
Anzahl
Zeilen
NZ
derBlöcke
des
Gleichungs¬
systems
NHBNHH
.2*NK
*NZ)
2*NK*
NBEL)
lU(IABEL)
O)
c £ s a>
a>
CTc <
Bild
3.6
:Speicherbenützung
für
die
verschiedenen
Programm
-
Over
lays
.

eingespannt
einfach
gela
gert
frei
Uäoq*^2
o
Bild
4.1
:Elementunterteilungund
Numerierung

-103-

-104-
Beginn Eingabe
Eingabe:Problemparameter
INMAT > 2
Eingabe: Materialien
(l
±Eingabe:
Geometrie
NTYPQ > 0 NTYPQS>0 NTYPTL>0 NTYPTR>0 NTYPBH >0 NTYPBV>0
Vierecke Vierecke
mit elast.
Auflagerung
Dreiecke
Spitze
links
Dreiecke
Spitze
rechts
Balken
quer zu
den Kolonnen
Balken
längs der
Kolonnen
cEingabe:Topologie
' '
1 1
TopologiePlattenelemente
NTYPBH > 0
Topologie Balken
quer der
Kolonnen
NTYPBV > 0
Topologie Balken
längs der
Kolonnen
Eingabe:Randbedingungen
rEingabe:
Belastungen
Bild 4.3: Eingabe -Flussdiagramm
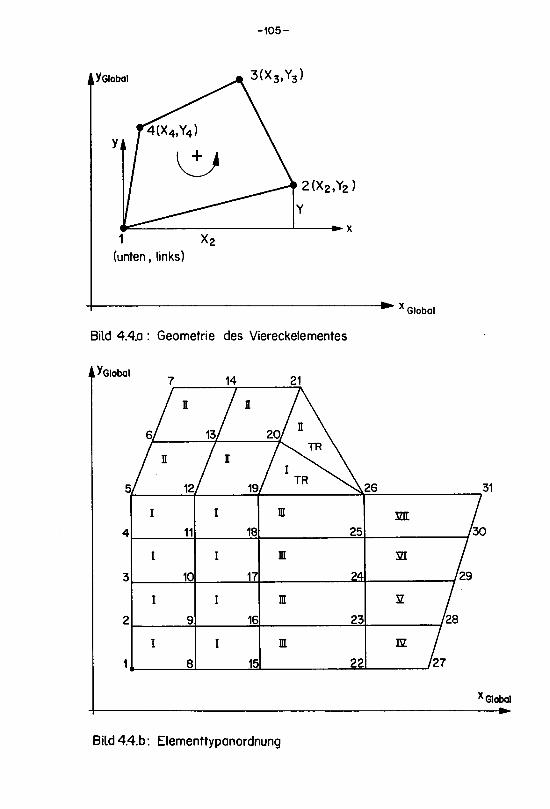
-105-
YGIobal 3(X3,Y3)
1 X2
(unten, links)
2(X2,Y2)
-*- xGlobal
Bild 4.4.a : Geometrie des Viereckelementes
nvGlobal7 14 21
/ II I /\
7
/ J
137
/ I/\TR
/ I ^S.19/5/ 12 ^\26 31
I I 1 M1
4 11 18 25 zo
I I I 21 13 10 17 24 2a
I I I 2 12 9 16 23 ZQ
I I m m 11. 8 15 22 _/27
xGlobal
to-
Bild4.4.b: Elementtypanordnung
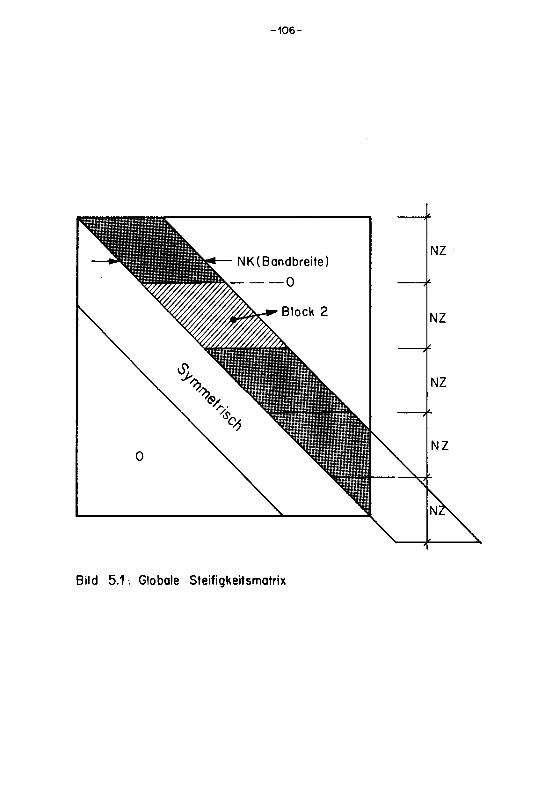
-106-
Bild 5.1 Globale Steifigkeitsmatrix

-107-
CTO) 0)
3 o <u
(25-7 36;
Legende: E\nnn^1 : Platte
frX*yfl : Scheibe
B (=BQ + BL)
BL, BQ : Balken
Tragwerk: Platte(4x4)-Einteilung
7f108)
(13-r24)
BQ -*¦ vertikale
Balken
(85t96)
(1t12) (37r48) (73-1-84)
BL —»• horizontale
Balken
-vBild 5.2: Steifigkeitsmatrix eines Elementes I in der Bandmatrix
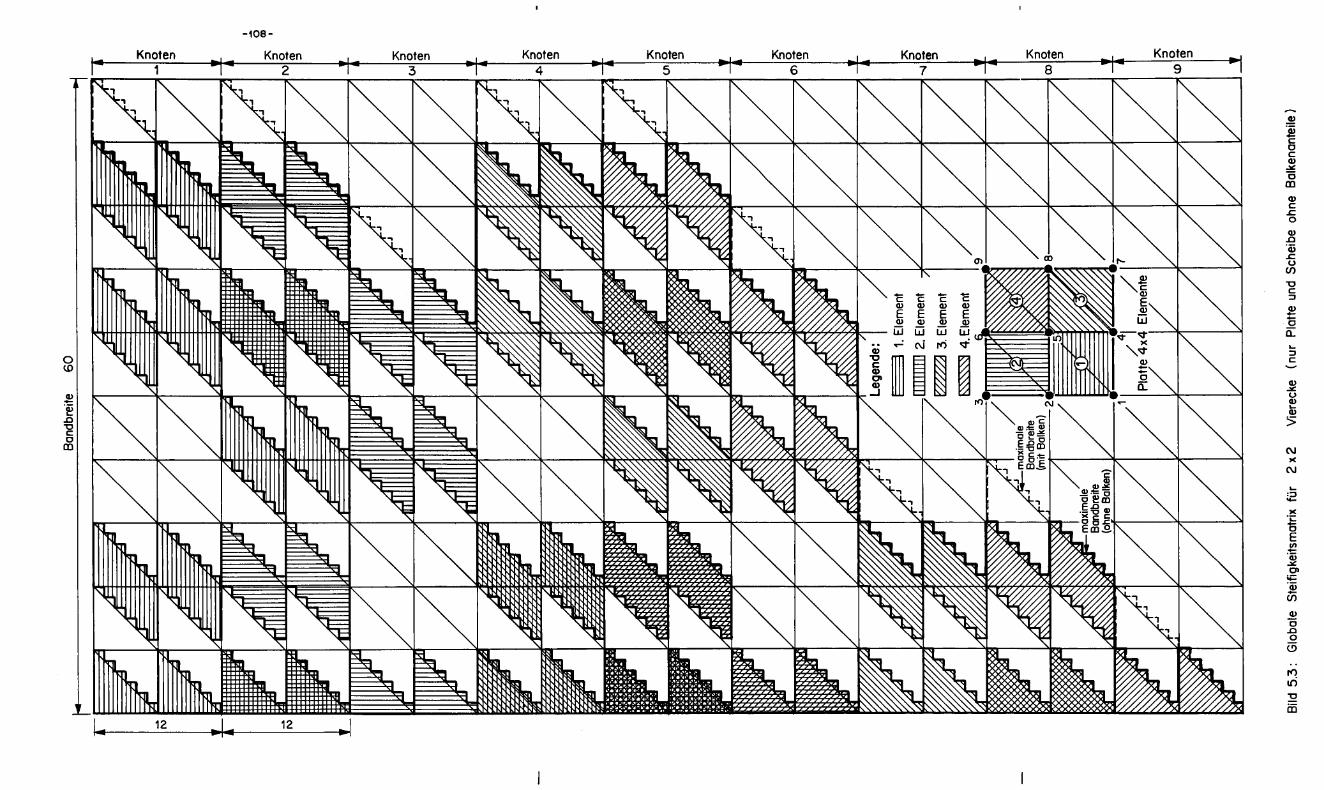
Bandbreite
60
Bild
5.3:
Globale
Steifigkeitsmatrix
für
2x2
Vierecke
(nur
Platteund
Scheibe
ohne
Balkenanteile)

-109-
Bild 7.1 : Gedrehtes Koordinatensystem
Knoten i
NFKN = Anzahl Freiheitsgrade pro Knoten
(12 im Falle der Rippenplatte)
Bild 7.2 : Einflusszone rotierte Randbedingungen in der globalen
Steifigkeitsmatrix

370Sek
ASekunden
RechenzeiHCP-ZeitohneEin-undAusgaberechenzeit)
300
240-
180
120-
60-
28+«^k}
Sek.
NK
=Bandbreite
NGL=
Totale
Anzahl
Gleichungen
„{28+ÄJGL
Q6}Sek
Lösung
durchBandvar
für5
Belastungsfä
lle
(Cholesky-
variable
Bandbreite)
Lösung
durchBandmat
für
1Belastungsfall
Algorithmus-
konst.Bandbreite)
144Sek.
<JNGL=2000
NK
=130
<\NGL=2000
NK
=100
3.38-107
Bild
2-10°
107
2-107
3-10
7
8.1
:Rechenzeit
für
dieLösung
derGleichungssysteme
4-107
5-107
-(NK)-NGL

¦111
Einfach gelagerte Platte V4
\
¦—>*f
,w=w,x
=w,xx = 0
w =
w,x=
w,xx¦
=
w.xy= 0
Wx=
W,xy= 0
/W,X=
W,y= W,xy=0
a)
Symmetrien
Eingespannte Platte 0/4)
VL¦w»y=
w.xv= °
,W =
W,X=
W,y= w,xx:
=
W,yy= 0
-W =
W,y=
W,yy= 0
rW =
W,y=
W,yy=
W,Xy= 0
i? = 0.3
\
hV
Symmetrien VV
W =W,x
=
W,y=W,xx== W,Xy=0
W=W,x=
W,y=W,XX=
:W,Xy= 0
/W.x=
w.xy =0
LWlX=W,y = W,xy=0
b)
/W,y=
W,Xy= 0
-W=W,X=W,y=W,xx==
W,yy=
W,xy =0
.W =
WlX=
W1y=
W,yy==
W,xy= 0
1
/,W=W,x=W,y
=
W,yy=
=
W,xy= 0
? X
Bild 9.1: Randbedingungen Platten (Unterteilung 2x2 Elemente)
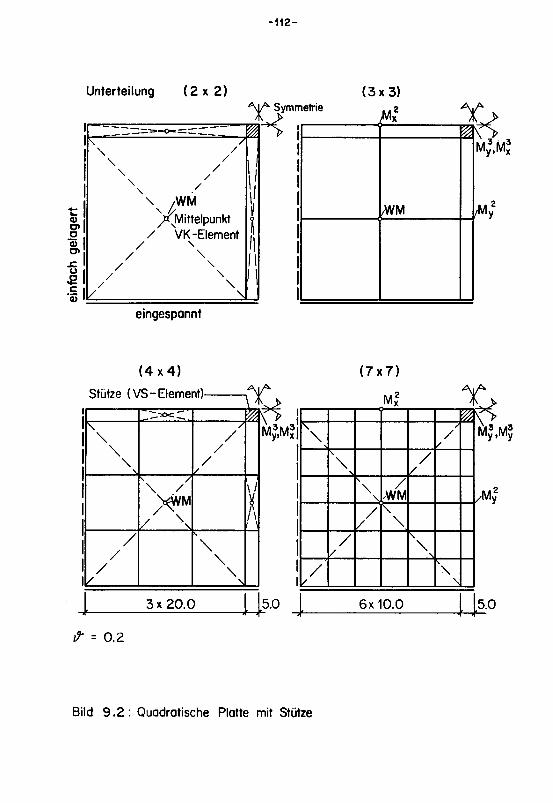
-112-
Unterteilung (2x2)^W*- Symmetrie
I-
r
o
a>
° l
-gl
•|IL
\
\/
\ /WM
/
/
/(Mittelpunkt/ VK-Element
\
\
J\l
eingespannt
(4x4)
Stütze (VS-Element)- -W
*T
\\\
/
iL.//
,V*x.
\ /
VWM
V \i
m
/
//
\\\
h
-i
KMl\T
\-V
iL/
(3x3)
WM
(7x7)
Mv
\
/
\
/
/WM
\
L.
XdMy,MX
j/m;
/
J-
\-*r
/
\\
y3M^.MJ
/My
3x20.0 5.0 6x10.0 5.0
fr = 0.2
Bild 9.2: Quadratische Platte mit Stütze

-113-
einfach gelagert
Frei
1" — 2.54cm
1LBS— 0.4536kg (P=400LBS -*• 181.44kg)
1PSI — ~0.07kg/cm2(E=60.000PSI -* 420kg/cm2)
N = 1
N =2
?>̂>^
'">
A^N = 4
N= 6
A^
**
Bild 9.3: Rippenplatte: Geometrie und Elementunterteilung
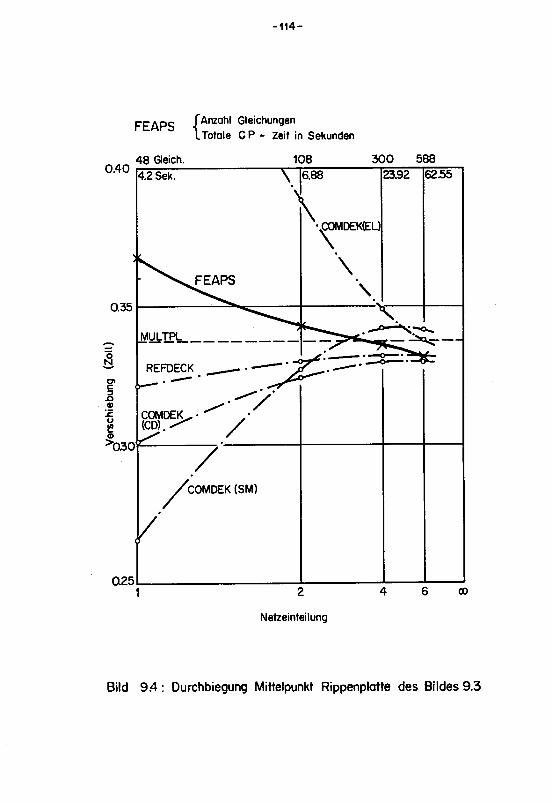
-114-
PP«p-(Anzahl Gleichungen
(.Totale CP - Zeit in Sekunden
0.4048 Gleich. 300 588
0.35
o
IM
c
u
ea>
'030'
0.25
Netzeinteilung
Bild 9.4: Durchbiegung Mittelpunkt Rippenplatte des Bildes 9.3

-115-
cV
Eo
2
FEAPS (N = 2)
FEAPS (N=6)
MULTPL
fC0MDEK,(N=6)&&< (EL, SM,CD)
UEFDEK,(N = 4)
Abstand y längs x
(für FEAPS x
11L/24
L/2)
Bild 9.5: Momentenverteilung von Mx und Myder Rippenplatte
des Bildes 9.3

-116-
K
000 PSI
v4"
Belastung P = 100LB
in A und B
Bild 9.6 : Schiefe zweiseitig gelagerte Rippenplatte
E = 453000 psiif= 0.343
==10.0
B cV DJ/pound
HV I
Fall 1 bis 8 Fall 9 bis 12
Bild 9.7 : Lage der konzentrierten Belostungen

-117-
COMDEK, N = 12
(EL.SM.CD Balken)
Abstand yF (FEAPS) nach Bild 9.6
Abstand yc (COMDEK , REFDEK) nach Bild 9.6
Bild 9.8 : Verteilung von Nx der Rippenplatte des Bildes 9.6
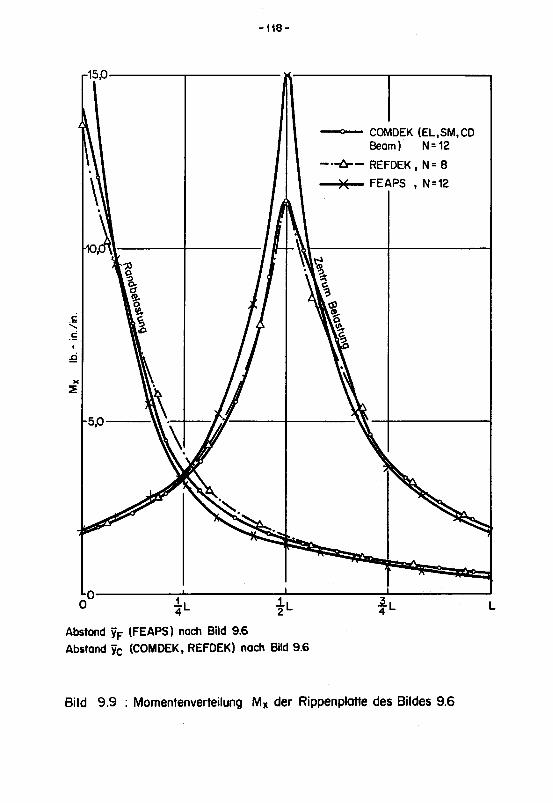
-118-
-o— COMDEK (EL.SM.CDBeam) N=12
-ä— REFDEK, N=8
-X— FEAPS , N=12
Abstand yF (FEAPS) nach Bild 9.6
Absfand yc (COMDEK, REFDEK) nach Bild 9.6
Bild 9.9 : Momentenverteilung Mx der Rippenplatte des Bildes 9.6

F=
Frei
EG=einfach
gelagert
—
Ripp
enun
terteilung
F
ex
=63.434°(aretan2)
ß=45.00°
Fall
1Fall2
Fall3
Fall4
Fall
5Fall6
Fall7
Fall
8
CO
EG
//
l
7'T
/egeg/
Ä«
LEGW
AA
yy
Fall
9Fall10
Fall
11
/&////Ä
Fall
12
Bild
9.10
:Zusammenstellung
gere
chne
ter
schiefer
Platten
mit
Ripp
enun
tert
eilu
ng

-120-
\
Belc stunc in (^
\
,^**^t1S
^k
.15
IN.
.10
I I IBelastung in D
1Belastun
1j in E
//
t/1t/£
'/m
VY4
M/
\\
V
.05IN.
I I I
Belastung in H
nach ^Schnitt C-D-E-F-G
Bild 97jSchnitt A-B-E-H-l
-o— FEAPS —
•*y- FEAPS-
—• Mehrain Analysis— Mehrain Analysis
Bild 9.11 : Durchbiegungen der schiefen Platte Fall 1 nach Bild 9.9
in den Schnitten nach Bild 9.10

-121-
Belastung in H
/p \
k \Kfuk «
\\lA
\ \/;/ \
\
\ \ •
*\ •
\\ 1
\\\\\\
1 1 1Belastung in E
f1
s
11
V
IiIiII \\Ii \\ll
\\Ii\\
j \
Iiii
.05
IN.
.04
.03
.02
.01
.00
1 1 1
Belastung in E
^ ^//' L^\y fc
!/1\
i \\r }I \
l \\
/ \X i
nach -»Schnitt C-D-E-F-G :
Bild 9.7JScfnitt A-B-E-H-l :
~°— FEAPS Mehrain Analysis
•A- FEAFS Mehrain Analysis
Bild 9.12: Durchbiegungen der schiefen Platte Fall 2 nach Bild 9.9
in den Schnitten nach Bild 9.10

-122-
.10IN.
OR
Ofi
.04
0?
^•00/!
Bellastung in C Belastung in D
r=5~3=***
FiU
•
<^L
<\r Y r
i
Belastun g in H
^>v,
*"' *v^> \s
/' \
/1V
1r
\/
H inach -| Schnitt C-D-E-F-G :
—°— FEAPS
Bild 9.7J Schnitl A-B-E-H-l —A- FEAPS
Mehrain Analysis
Mehrain Analysis
Bild 9.13: Durchbiegungen der schiefen Platte Fall 3 nach Bild 9.9
in den Schnitten nach Bild 9.10

¦123-
.020IN.
.015
010
.005
i -i i
Belastung in H
-A-
w / '
//7/ \r\
tVI
\ \\ \\ \\ \
\
t \ii A i
\k
\\ \
w Vhk
V '
>k
1V
L l 1 1
^Belastung in E
\\
\
\
.03
IN.
.02
.01
.00
#Ii
II
l
a i—i—r
/'Jt^-JBelastung in E
1\
\
inach "1 Schnitt C-D-E-F-G
Bild 9.7J Schnitt A-B-E-H-l
—°— FEAPS
--£*- FEAPS
Mehrain Analysis
Mehrain Analysis
Bild 9.14: Durchbiegungen der schiefen Platte Fall 4 nach Bild 9.9
in den Schnitten nach Bild 9.10
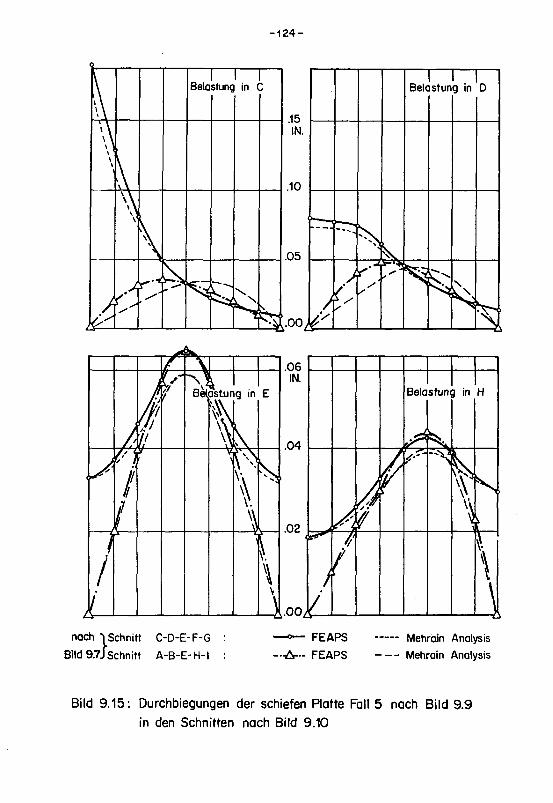
-124-
1 \
1 1 1Belastung in C
1 1 1Belastung in D
\ \
15\ \
\ \\ 1\
\\
\ \\ \
IN.
.10\ \\\
V
.05
"
%^.
/t*^ä
¦
-*
s
Ä'T' ^^N
•S""1
]^ i-ook: \
06
IN.
04
Belasfum I in H
//f
---ot
>
\n? ^i
W \(
00/V
f \\
nach "I Schnitt C-D-E-F-G :
Bild 9.7JSchnitt A-B-E-H-l :
-°— FEAPS
¦A™ FEAPS
— Mehrain Analysis-- Mehrain Analysis
Bild 9.15: Durchbiegungen der schiefen Platte Fall 5 nach Bild 9.9
in den Schnitten nach Bild 9.10

¦125-
1 1 1Belastung in H
03
IN. f^K\/
t
/7i// v
0?
/
1 ,
fii
\
\ \\ii
i
II
/v
1 II \ \ l
1 ft \ \ \\1 I \
'// \ A\
01\ lM\
// \ \/
Ia
11/
f\
•\\If \ -4
il \\
.00 '5
¦ 1 1Belastung in E
f.h1/ NX'
( »'h \
1 \
//// \\// \\
/
//V
\\\\\\tI
.05IN.
.04
.03
.02
.01
i i i
Belastung in E
/
Ak
\
/ n\i.
iY \i
;
1
\/ \
nach ySchnitt C-D-E-F-G
Bild 9.7/schnitt A-B-E-H-l
~~°— FEAPS Mehrain Analysis
—A— FEAPS Mehrain Analysis
Bild 9.16: Durchbiegungen der schiefen Platte Fall 6 nach Bild 9.9
m den Schnitten nach Bild 9.10

-126-
I I IBelastung in C
I I IBelastung in D
15
IN
10
05
.00/
-^-*--
Vv
N^^
* ^ä—*-v
N
N
s
L_^
l l i
Belastung in H
w
~1***^!'
h(
5 \\
—i
/V
h
V
i 1\
\
inach "(Schnitt C-D-E-F-G
Bild 9.7JSchnitt A-B-E-H-l•
-°— FEAPS
•A- FEAPS
Mehrain Analysis
Mehrain Analysis
Bild 9 17: Durchbiegungen der schiefen Platte Fall 7 nach Bild 9.9
in den Schnitten nach Bild 9.10

-127-
03i i
Belastung in D
/ \>~v
{
/
/ ^^1/ /
/\\ \
!i
i
kj *
1/i
k
V>
L\
w \
IN.1 1 '
Belastung in H
M02
/ fit \ \
/
'
1>
\ \
\
i
1//V \
\ Vi
01 It\
\ \l
i
li
r\ 1
\t\
11i ff'//it ¦^
s-00^ A
1 1 1
^Belastung in E Aiiii
K Belastung in E
it
.03
IN
ir \{i \
1 \
.02i \
1
i \
i \
.01 \f ) l
y \/ \
00,\ ),
nach ^Schnitt C-D-E-F-G :—°— FEAPS Mehrain Analysis
Bild 9.7JSchnitt A-B-E-H-l : —A-- FEAPS —- Mehrain Analysis
Bild 9.18: Durchbiegungen der schiefen Platte Fall 8 nach Bild 9.9
in den Schnitten nach Bild 9.10

-128-
noch "(Schnitt A-B-C-D-E:
Bild 9.7JSchnitt F-G-H-l-J.
—°— FEAPS Mehrain Analysis
—A— FEAPS Mehrain Analysis
Bild 9.19: Durchbiegungen der schiefen Platte Fall 9 nach Bild 9.9
in den Schnitten nach Bild 9.10
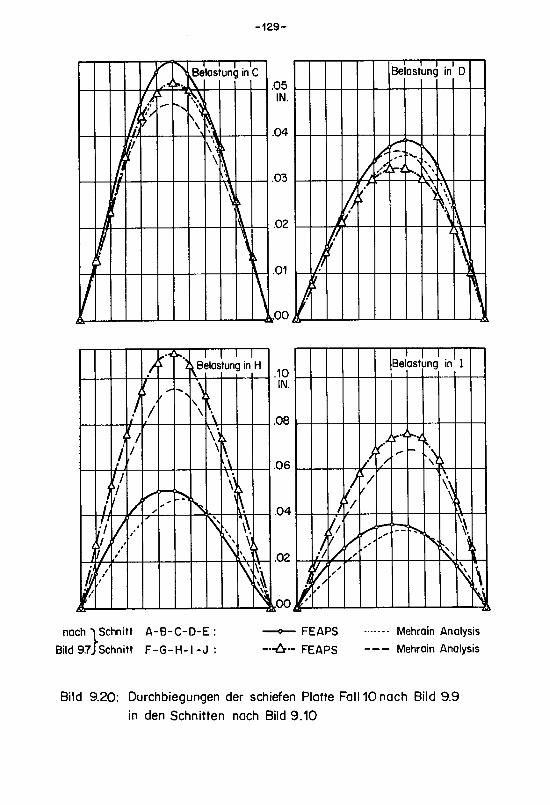
-129-
—i—i—r i—
Belastung in C
AAkr\
k" 's
InrVil \»
I
\
A
f1
\
—1
.05
IN.
.04
03
,02
.01
,00
Belastuncr—i
in D
// >*T Ts
k rlA
II r\[
\i
Beiast jng in I
>
-<
**•
^
\^ *
1 \
i(; ,*•— *N \
jw*mt
/ •• \
nach "»Schnitt A-B-C-D-E :
Bild 9.7JSchnitt F-G-H-l-J :
—o— FEAPS Mehrain Analysis
—öt~ FEAPS Mehrain Analysis
Bild 9.20: Durchbiegungen der schiefen Platte Fall 10 nach Bild 9.9
in den Schnitten nach Bild 9.10
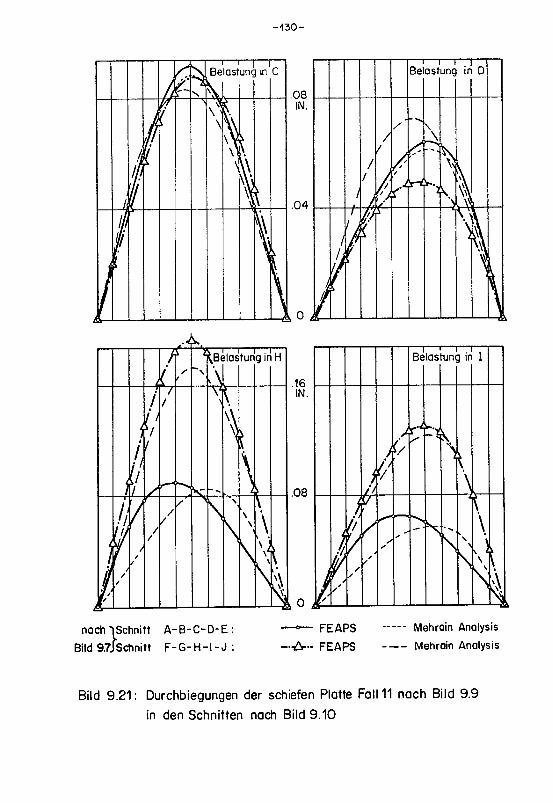
-130-
)Q''s
1 ' 1Belastung in
\
c
h
kilIi
V
\
\
VA
iff
X1
08IN.
.04
1 1
Belastung in D
/ \
/ _\t {?, —.
1 ^/
A-ty..' \
1 V? 4\ \\/ IL
~T fif\3 IW
1 %t \ \\1m 2
H
I •M
if\
iif
_1 ' 1 1
Belastung in I
16
IN.
08
i
1
(/
>
(/y
-?k^
,\0 t
i
ll —•
--. \
i s
s
f *
*
h*0 J fs
nSchnitt A-B-C-D-E:
7jSchnitt F-G-H-l-J:
nach -iSchnitt A-B-C-D-E:
Bild 9.7J
FEAPS Mehrain Analysis
—A-- FEAPS Mehrain Analysis
Bild 9.21: Durchbiegungen der schiefen Platte Fall 11 nach Bild 9.9
in den Schnitten nach Bild 9.10

-131-
Ii.4
>
kBfslastung in C
jfi
Ii'
H\
Vs
/\ 1
\
\
.08
IN.
06
04
02
00
l i 1 1Belastung in D
/ _\
/ ^ji f / *^
/
/// JrH
t •'A %\
/
L11
<
}IP Ji
A \/ \
nach TSchnitt A-B-C-D-E: —°— FEAPS Mehrain Analysis
lild 9.7JSchnitt F-G-H-lBild -l-J : —A— FEAPS Mehrain Analysis
Bild 9.22: Durchbiegungen der schiefen Platte Fall 12 nach Bild 9.9
in den Schnitten nach Bild 9.10

-132-
Widerlaqer
Legende:
Mx-FEAPS
My-FEAPS
Mx =+16.03tmStützenzone
10.90m
1050m
Mass- Skizze:
Punktförmig gelagert
Mx = Mx - Modell
My = My -Modell
oooobo>o«o
Frei- Punktförmig gelagertm o o o o o o -Frei
20°
56.0m
Punktförmig gelagert
76.0m
25 tm
Massstab
Momente
>2-0r% 6.0m 6.0 m 6.0 m 6.0 m 6.0 m 6.0 m
^Widerlager
336.0 m j. 6.0m 6.0m 6.0 m 6.0m 6.0 m ,2.0m
Bild 9.23: Momente der schiefen Plattenbrücke nach dem FEAPS-Programm und nach den Modell messungen
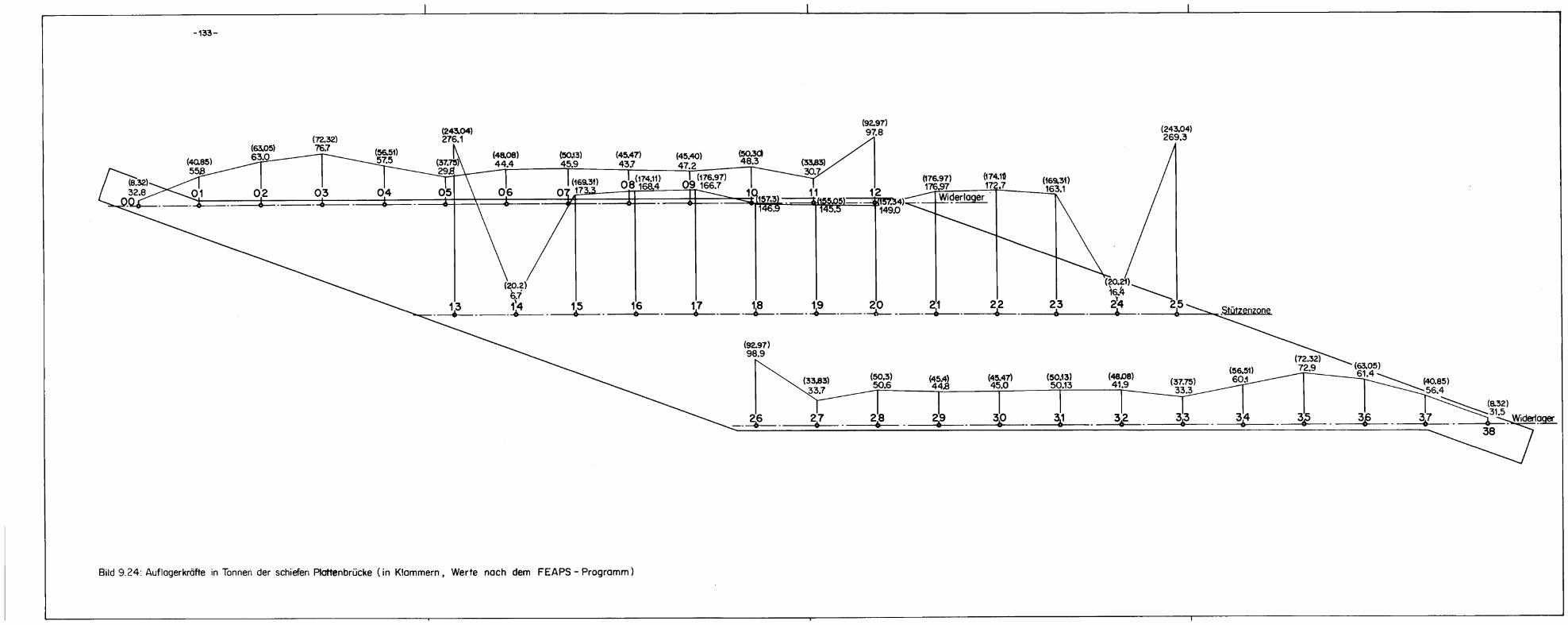
-133-
(63.05)63.C
(72.32)76.7
(243.04)276.1
(92.97)97.8 (243.04)
269.3
QMderlaqer
Bild 9.24: Auflagerkräfte in Tonnen der schiefen Plattenbrücke (in Klammern, Werte nach dem FEAPS - Programm)

-134-
ANHANG

-135-
FEAPS-Programm für die Berechnung von Platten und Rippenplatten
1. ZUSAMMENFASSUNG
FEAPS Finite Element Analysis of Plate Systems
Programmiert von: Giorgio F. Alberti,
ETHZ Institut für Baustatik und
FIDES-Rechenzentrum.
Für : Control Data 6500 Anlage
Fertigstellung : September 1971
Das Programm dient zur Berechnung von zweidimensionalen
Platten und Rippenplatten mit exzentrisch angeschlossenen
Balken (Rippen). Beliebige Geometrie und Materialeigenschaften,
Belastungen und Randbedingungen können behandelt werden. FEAPS
erlaubt die Berechnung mit Plattenelementen allein oder die
Berechnung mit Plattenscheibenelementen und exzentrisch an¬
gehängten Balken. Das in FORTRAN IV geschriebene FEAPS-
Programm enthält kleine Programmteile in der "Assembler"-
Sprache COMPASS. Die Daten werden in Funktion der Eingabe-
grössen dynamisch gespeichert.
1.1 Netzeinteilung
Die Plattensysteme werden in Kolonnen von Elementen von
"links" nach "rechts" unterteilt. Die einzelnen Elemente
sind in derselben Richtung der Kolonnen und in jeder Kolonne
von unten nach oben fortlaufend numeriert. Sie sind drei¬
eckig oder viereckig. Für den Einbau von Stützen und ela¬
stisch aufgelagerten Elementen sind spezielle viereckige
-136-
Elemente vorgesehen. Exzentrisch angeschlossene Balken längs
und quer zu den Kolonnen, aber immer mit einer Seite eines
Viereckes oder Dreieckes zusammenfallend, verursachen die
Koppelung der Platten- und Scheibenwirkung.
1.2 Belastungen
1) Konzentrierte Lasten in den Knoten
2) Gleichmässig verteilte Belastung über ein, mehrere
oder alle Elemente
3) Linienlasten (Elementrandlasten)
4) Vorspannung
5) Einflussflächen
6) Vorgeschriebene Rand- bzw. Knotenverschiebungen
1.3 Kinematische Randbedingungen
Jedem Knoten entsprechen sechs (für die Platte) oder zwölf
(für die Rippenplatte) Verformungsparameter. Zur Behandlung
von kinematischen Randbedingungen kann jeder Verformungs¬
parameter eliminiert, d.h. zu Null gesetzt werden. Durch
Angabe des, dem Diagonalglied der globalen Steifigkeitsmatrix
zu addierenden Steifigkeitskoeffizienten, kann man elastische
Federungen im Tragwerk einbauen. Die Randbedingungen können
auch in einem gedrehten Koordinatensystem angegeben werden.
Einfach gelagerte, eingespannte und liniensymmetrische
Ränder werden durch besondere Kennwerte eingegeben.

2. EINGABE
¦137-
Erste Karte
Kolonne 1-15
Kolonne 16-25
Optionskarte (A5, 10X, A5)
Nur die ersten fünf Buchstaben werden
interpretiert.
Ende der Berechnung
Platte mit Scheibenwirkung
und exzentrisch angehängten
Balken (Rippen)
Platte ohne Scheibenwirkung
(Plattenelemente allein)
Rippenplatte wird angenommen
STOP
RIPPE(NPLATTE)
PLATT(E)
Leer
Es werden nur die ersten 5 Buchstaben
interpretiert.
CHOLE(SKY): Lösung des Gleichungssystems
mit Cholesky's Algorithmus
GAUSS : Lösung des Gleichungssystems
mit Gauss'schem Algorithmus
Leer : wird als GAUSS angenommen
Nächste Karte
Kolonne 1-5
Beginn-Karte (A5)
BEGIN: vorher können bis zu 20 Kommentar¬
karten vorhanden sein
Nächste Karte : Titelkarte (10A8)
Kolonne 1-80 : Titel des Problems, der in der Ausgabe
herausgedruckt wird.

-138-
2.1 Parameter des Problems
Nächste Karte
Kolonne 6-10
Kolonne 11-15
Kolonne 16-20
(SX, 315)
Anzahl Kolonnen von Elementen (NKOE)
Maximale Anzahl Elemente in einer Kolonne
(MAXEKO)
Anzahl zusätzlicher (zu den generellen)
Materialien (die Numerierung ist 3,4,..)
(NMAT)
Nächste Karte
Kolonne 6-10
Kolonne 11-15
Kolonne 16-20
Kolonne 21-25
Kolonne 26-30
Kolonne 31-35
(5X, 715)
Anzahl Vierecktypen (NTYPQ)
Anzahl Vierecktypen mit elastischer
Auflagerung (NTYPQS)
Anzahl Dreiecktypen mit Spitze links (NTYPTL)
Anzahl Dreiecktypen mit Spitze rechts (NTYPTR)
Anzahl Balken quer zu den Kolonnen (NTYPBL)
Anzahl Balken längs der Kolonnen (NTYPBQ)
Nächste Karte : (5X, 315)
Kolonne 6-10 : Anzahl Randbedingungen (NESRB)
Kolonne 11-15 : Anzahl Belastungsfälle (NBEL)
Kolonne 16-20 : Anzahl Stützen (NSTU)
2.2 Steuerung des Echoprint
Nächste Karte : Falls das Herausdrucken der eingelesenen
Karten verlangt wird:
Kolonne 1-5 : DRUKA
Eine beliebige Anzahl solcher Karten kann verwendet werden.

-139-
Nächste Karte : Falls das Herausdrucken der vom Computer
verstandenen Daten verlangt wird:
Kolonne 1-5 : DRUDA
Falls diese Karten weggelassen werden, werden die Karten
einmal herausgedruckt.
2.3 Generelle Materialeigenschaften
Nächste Karte
Kolonne 1-5
Nächste Karte
Kolonne 11-25
Kolonne 26-40
Kolonne 41-55
Kolonne 56-70
Oder
nächste Karten
Kolonne 1-5
Nächste Karten
Falls Angabe generelle isotrope Material¬
eigenschaften
GEISO
Generelle isotrope Materialeigenschaften
(10X.4F15)
Generelle Dicke (T) (Abschnitt 2.5)
Generelle Poisson's-Zahl (XNU)
Genereller Elastizitätsmodul Platte (PEL)
Genereller Elastizitätsmodul Balken (BEL)
Falls Angabe generelle orthotrope Material¬
eigenschaften
GEORT
Generelle orthotrope Materialeigenschaften
2(10X,4F1S/)
Erste Karte : Pii>Pi7>P?2,p33 der platten-Elastizitätsmatrix
Pll,W,xx+Pl2-w,yy
Pl2-W,xx+P22'W,yyM =
p,,-wxy r33 ,xy
-140-
Zweite Karte : Falls Rippenplatte
s,.,s.2,s-2,s,- der Scheibenelastizitätsmatrix.
N = s..-u +s.,*v
x 11 ,x 12 ,y
N » s,..u +S---Vy 12 ,x 22 ,y
Nxy =S33-(u,y+v,x^
Oder
nächste Karten : Falls Angabe generell isotrope und orthotrope
Materialeigenschaften
Kolonne 1-5 : GISOR
Nächste Karten : Generelle isotrope und orthotrope
Materialeigenschaften
3(10X,4F1S/)
s. oben wie für GEISO und GEORT zusammen.
2.4 Zusätzliche Materialien
Falls NMAT>2
Nächste Karte
Kolonne 1-5
Nächste Karten
(Generelle isotrope und orthotrope
Materialien erhalten die Nummer 1 und 2)
Material (A5)
MATER
Materialeigenschaften der NMAT zusätzliche
Materialien
(5X,AS,4F1S) für isotropes Material
(SX,A5,4F1S/10X,F15) für orthotropes Material
(2. Karte nur mit Rippenplatte)

-141-
Für isotropes Material:
Kolonne 6-10 : ISOTR oder nichts
Kolonne 11-25 : Elastizitätsmodul-Platte (PEL)
Kolonne 26-40 : Poisson"s-Zahl (XNU)
Kolonne 41-55 : Elastizitätsmodul-Balken (BEL)
Für orthotropes Material:
ORTHOKolonne 6-11
Kolonne 11-25
Kolonne 26-40
Kolonne 41-55
Kolonne 56-70
'11
hl
?22
?33
s. oben für Platte
Nächste Karte : falls Rippenplatte
Kolonne 11-25
Kolonne 26-40
Kolonne 41-55
Kolonne 56-70
'11
512
522
533
s. oben für Scheibe
2.5 Geometrieeingabe
Es gibt zwei Möglichkeiten dieser Eingabe:
Knotenkoordinaten oder Seitenlängen mit dazugehörigen Winkeln.
Nächste Karte : Geometrie der Plattenelemente (A5)
Kolonne 1-5 : GEOEL

-142-
Nächste Karten
Falls NTYPQ>0
Kolonne 6-15
Kolonne 16-25
Kolonne 26-35
Kolonne 36-45
Kolonne 46-55
Kolonne 56-65
Kolonne 66-75
Kolonne 76-77
Andere Art der
Kolonne 6-15
Kolonne 16-25
Kolonne 26-35
Kolonne 36-45
Kolonne 46-55
Kolonne 66-75
Kolonne 76-77
NTYPQ-Karten für die Vierecke
(5X,7F10,I2)
Koordinate X Knoten 2
(Falls 8888.88888 siehe später)
Koordinate Y Knoten 2
Koordinate X Knoten 3
Koordinate Y Knoten 3
Koordinate X Knoten 4
Koordinate Y Knoten 4
*»x
Falls NTYPQS>0
Erste Karte
Zweite Karte
Kolonne 6-15
: Dicke der Platte (Wenn leer wird T gesetzt)
: Materialnummer (Wenn leer wird 1 gesetzt)
(generelles isotropes Material : 1
generelles orthotropes Material: 2)
Eingabe, falls die erste Zahl 8888.88888
: 8888.88888
: Länge der Seite 1-2 (3-4)
: Länge der Seite 2-3 (4-1)
: Winkel (Neunzigerteilung) zwischen Seite 1-2
und x-Achse
: Winkel (Neunzigerteilung) zwischen Seite 1-2
und 2-3
: Dicke der Platte (Wenn leer wird T gesetzt)
: Materialnummer (Wenn leer wird 1 gesetzt)
2 mal NTYPQS Karten für die Vierecke mit
elastischer Auflagerung
(5X,7F10,I2/ 5X,F10)
: Siehe normale Vierecke
: Feder-Konstante (Verschiebung für eine
Krafteinheit)

-143-
Falls NTYPTL>0
Kolonne 6-15
Kolonne 16-25
Kolonne 26-35
Kolonne 36-45
Kolonne 46-55
Kolonne 56-57
Andere Art der
Kolonne 6-15
Kolonne 16-25
Kolonne 26-35
Kolonne 36-45
Kolonne 46-55
Kolonne 56-57
NTYPTL-Karten für Dreiecke mit der Spitze
links der Kolonne
(5X,5F10,I2)
Koordinate X Knoten 2
(Falls 8888.88888 siehe später)
Koordinate Y Knoten 2
Koordinate X Knoten 3
Koordinate Y Knoten 3
Falls NTYPTR>0
analog zu TL
Dicke der Platte (Wenn leer wird T gesetzt)
Materialnummer (Wenn leer wird 1 gesetzt)
(generelles isotropes Material : 1,
generelles orthotropes Material: 2)
8888.88888
Länge Seite 1-2
Länge Seite 2-3 (1-3 für DR)
Winkel (Neunzigerteilung) zwischen Seite 1-2
und x-Achse.
Die Seite 2-3 (1-3 für DR) steht senkrecht
zur Seite 1-2.
: Dicke der Platte (Wenn leer wird T gesetzt)
: Materialnummer (Wenn leer wird 1 gesetzt)
: NTYPTR-Karten für Dreiecke mit der Spitze
rechts der Kolonne
(5X,5F10,I2)

-144-
Falls NTYPBH>0
Kolonne 6-¦15
Kolonne 16-•25
Kolonne 26--35
Kolonne 36--41
NTYPBH-Karten für Balken quer zu den
Kolonnen
(5X,3F10,I5)
Balkenachse Exzentrizität (nach unten positiv)
(EX)
Eigenträgheitsmoment IZ = fz -dF (ZI)
Querschnitt
Fläche F Querschnitt
Materialnummer (Wenn leer 1 gesetzt)
(generelles isotropes Material : 1
generelles orthotropes Material: 2)
Falls NTYPBV>0 : NTYPBV-Karten für Balken längs ("Vertikal")
der Kolonne
(5X,3F10,I5)
analog NTYPBH
2.6 Topologie der Plattenelemente
Nächste Karte : Topologie der Plattenelemente (A5)
Kolonne 1-5 : TOPPL
Nächste Karten : Platten Topologie
(A5, 15, 3X, A2, 215, F20)
Gelesen wird bis eine Bezeichnung in Kolonne 1-5 gefunden wird.
Die nächsten vier Angaben (falls Null) werden von den vorherigen
genommen.
Kolonne 6-10 : Kolonnennummer (JC)
Falls nur JC und NE gegeben werden, wird
die Kolonne bis zum neuen JC wiederholt.
Falls NE ändert, wird linear interpoliert.

•145-
Kolonne 14-15
Kolonne 16-20
Kolonne 21-25
Kolonne 26-45
: Form des Elementes
VK: Viereck
VS: Viereck elast. gestützt
DL: Dreieck mit Spitze links
DR: Dreieck mit Spitze rechts
: Nummer des Elementtypes (NTY)
: Anzahl gleichförmiger Elemente in der
Kolonne (NE)
: Winkel der Drehung des Elementes im
Gegenuhrzeigersinn (Neunzigerteilung)
Falls Option Plattenscheibe + Balken und NTYBL>0:
Nächste Karte : Topologie der Balken quer zu den Kolonnen (A5)
Kolonne 1-5 : TOPBL
Nächste Karten : (A5, 615)
Gelesen wird bis in Kolonne 1-5 nächstes Label.
Kolonne 6-10
Kolonne 11-15
Kolonne 16-20
Kolonne 21-25
Kolonne 26-30
Kolonne 31-35
Kolonnennummer (JC)
Nummer des Typs (NTY)
Plattenelement bei welchem der Balken auf
Seite 1-2 (untere Seite) steht. (IEL)
Anzahl gleicher Elementtypen in der Kolonne (NE)
Intervall (falls NE>1) in der Kolonne (KDE)
Intervall zwischen den Kolonnen (KDK),
falls Schleife über Kolonnen
Falls nur JC und NE gegeben werden, wird die
Kolonne bis zum neuen JC wiederholt. Falls NE
ändert, wird linear interpoliert.
Falls Option Plattenscheibe + Balken und NTYBQ>0:
Nächste Karte : Topologie der Balken längs der Kolonnen (A5)
Kolonne 1-5 : TOPBQ

-146-
Nächste Karten
Gelesenwird
bii
Kolonne 6-10
Kolonne 11-15
Kolonne 16-20
Kolonne 21-25
Kolonne 26-30
Kolonne 31-35
(A5, 615)wird
bis in Kolonne 1-5 nächstes Label
Kolonnennummer (JC)
Nummer des Typs (NTY)
Plattenelement bei welchem der Balken links
ist (Seite 4-1 für Vierecke und 3-1 für
Dreiecke) (IEL)
Anzahl gleicher Elementtypen in der Kolonne (NE)
Intervall (falls NE>1) in der Kolonne (KDE)
Intervall falls Schleife über Kolonnen (KDK)
Falls nur JC und NE gegeben werden, wird die
Kolonne bis zum neuen JC wiederholt. Falls NE
ändert, wird linear interpoliert.
2.7 Randbedingungen
Nächste Karte
Kolonne
Nächste
1-5
Karten
Randbedingungen (A5)
RABES
(A5,415,5X,1211,3X.F10)
Gelesenwird,
Kolonne 6-10
Kolonne 11-15
Kolonne 16-20
Kolonne 21-25
Kolonne 31-42
wird,
bis in Kolonne 1-5 eine Bezeichnung gelesen wird.
Elementkolonne, welche Randbedingungen hat (KOL)
Elementnummer der Kolonnen (von unten nach
oben) (IEL)
Knotennummer des Elementes (NOPKT)
Anzahl Randbedingungen gleicher Art in der
Kolonne
"1" falls der Verformungsparameter null ist.
Für die Platte allein werden nur die ersten
6 berücksichtigt. Die 12 Freiheitsgrade sind:
w; w
und:
,m*
v; u
w
,PPw
,mm'w für die Platte,mp
: v :y, Cü für die Scheibe.,P >m
'
Falls ALPHA=0.0 ist p die x-Richtung und m
die y-Richtung.

-147-
Bis auf den Winkel und die Angabe der einzelnen Verformungs¬
parameter werden die anderen Werte, falls nicht angegeben,
gleich den vorherigen gesetzt. Eine Schleife über die Kolonnen
ist möglich (mit dazwischen linear interpolierten Werten),
falls nur KOL und NE gegeben werden.
Die drei meistgebrauchten Randbedingungen sind:
a) Einfach gelagerter Rand
In der Auflagerrichtung werden:
w;w;w ;u;u zu Null gesetzt,
b) Eingespannter Rand
In der Einspannrichtung werden:
w;w ;w ;w: w : u ; u ;v
(*)
,p ,m'
,pp»
mp'
,p' l >
zu Null gesetzt.
c) Rand mit Symmetrie
Normal zur Symmetrierichtung werden:
w ; w ; v ; V ; Ol zu Null gesetzt.jui
y mp
Kolonne 46-55 : Winkel ALPHA (90er Teilung, dezimal)
der Rotation der x-Achse und y-Achse
im Gegenuhrzeigersinn
(45 30' wäre 45.5)
Kolonne 56-65 : Steifigkeitskoeffizient (Kraft für Einheits¬
verformung) gleich für alle in den Kolonnen
31 bis 42 angegebenen Verformungsparameter.
(Falls er nicht angegeben wird, wird er
gleich 10 angenommen)
(*) Die kinematischen Randbedingungen sind in diesem Fall nicht
ganz erfüllt.
¦148-
Für die drei obenerwähnten, speziellen Randbedingungen
existiert eine direkte Methode:
Kolonne 31-33 : PAR: falls die zu betrachtende Seite die
um ALPHA im Gegenuhrzeigersinn gedrehte
Parallele (PAR) zur globalen x-Achse im
angegebenen Knoten ist.
NOR: falls die zu betrachtende Seite die
um ALPHA im Gegenuhrzeigersinn gedrehte
Parallele zur globalen y-Achse im angegebenen
Knoten ist.
AUF: falls punktaufliegend (w=0)
EIN: falls alle Freiheitsgrade zu Null
gesetzt werden.
Die zwei letzten Bezeichnungen brauchen keine
weiteren Angaben in den folgenden Kolonnen.
Kolonne 34-36 : AUF für aufliegend
EIN für eingespannt
SYM für symmetrisch
z.B. PARSYM bedeutet (angenommen ALPHA=0.0) Symmetrie bezüglich
der x-Achse.
2.8 Belastungen und Ausgabesteuerung der Resultate
Nächste Karte : Belastungen (A5)
Kolonne 1-5 : BELFA
Nächste Karten : Titel, Steuerung der Ausgabe, Lasten.
Gelesen wird bis in Kolonne 1-5 BELFA für neuen Belastungs¬
fall oder andere Bezeichnungen.
Titelkarte (10A8)
Der Titel wird in der Ausgabe herausgedruckt.

¦149-
Karte für die Steuerung der Ausgabe (5X,5(A3,2X))
(Nur die ersten 3 Buchstaben werden interpretiert)
Kolonne 6-10
Kolonne 11-15
Kolonne 16-20
Kolonne 21-25
Kolonne 26-30
Gebraucht für die Bestimmung des Ortes,
(Ecken oder Schwerpunkte der Elemente)
an dem die Resultate herausgedruckt werden.
ECK(E) : Herausdrucken der Werte in der Ecke "1"
(Knoten) der Elemente.
Herausdrucken bei den SchwerpunktenSCH(WE)
ALL(ES)
leer
VER(SC)
nichts
ALL (ES)
KRA(EF)
nichts
HAU(PT)
nichts
RAN(DK)
nichts
(nur bei viereckigen Elementen)
: An beiden obenerwähnten Orten werden
die Werte herausgedruckt
: Nichts wird herausgedruckt
: Herausdrucken Verschiebungen
: Keine Ausgabe
: Herausdrucken der Verschiebungen,
Schnittkräfte, Hauptschnittkräfte
und Randkräfte (braucht keine
weiteren Bezeichnungen)
: Herausdrucken Schnittkräfte
: Keine Ausgabe
: Herausdrucken Hauptschnittkräfte
: Keine Ausgabe
: Herausdrucken Randkräfte
: Keine Ausgabe
Lastkarten (A5,3X,A2,3X,A2,4I5,4F10)
Gelesen wird bis in Kolonne 1-5 eine Bezeichnung (BELFA,
ENDPR, STOP) gefunden wird.

-150-
Kolonne 9-10 Form der Belastung (IFO)
GT: Gleichmässige Belastung über das
ganze Tragwerk
GE: Gleichmässige Belastung über
einzelne Elemente
RE: Linienlast (Elementrandlast)
Analog wie für die Vorspannung können die
Randlasten nur an der "unteren" Seite
(Knoten 1-2) oder an der "linken" Seite
(Knoten 1-4 für Vierecke und 1-3 für
Dreiecke) angebracht werden. Für die
Randfälle werden zusätzliche, tatsächlich
nicht vorhandene ("dummy") Elemente einge¬
führt.
KE: Knotenlast
VO: Vorspannung
KO: Kombination
Kolonne 14-15 : Richtung der Belastung (NTYP)
KX.KY.KZ: Kraft in globaler Richtung der
x-, y-, z-Achsen
Vorspannung und Linienlasten sind in
z-Richtung
MX,MY: Moment in globaler Richtung um die
x-, y-Achsen
XX,YY,XY: Globale Krümmungsbelastungen
w
,xx
flächen.
w ; w Richtung für Einfluss-»yy > xy
Kolonne 16-20
Kolonne 21-25
Kolonnennummer (KOL).
(Nicht benutzt für GT).
Elementnummer (IEL).
(Nicht benutzt für GT).

Kolonne 26-30
Kolonne 31-35
-151-
Knotennummer (NO).
(Nicht benutzt für GT,GE).
Seitennummer im Falle Vorspannung oder
Randlast.
Anzahl Elemente in der Kolonne (NE)
(Nicht benutzt für GT) mit gleicher
Belastung.
Kolonne 36-45 : Wert der Belastung (oder Vorspannkraft V)
2.9 Vorspannung
Für die Vorspannung wird als Richtung KZ angegeben. Falls
eine Vorspannlast angegeben ist, folgen, nach dem Wert der
Vorspannkraft, 3 Exzentrizitäten in z-Richtung (positiv nach
unten) am Anfang, in der Mitte und am Ende der angegebenen
Seite des Elementes. Zwischen den 3 Punkten wird ein parabel-
förmiges Kabelstück angenommen. Die Parabel ist zweiten Grades
und das Programm rechnet automatisch die Ersatzlasten. Analog
zur Balkentopologie wird die Last Vorspannung an einem Element
nur an der "unteren" (Knoten 1-2) oder an der "linken" Seite
(Knoten 1-4 für Vierecke und 1-3 für Dreiecke) angebracht.
Deswegen hat man ein tatsächlich nicht vorhandenes ("dummy")
Element mehr in der Kolonne und eine zusätzliche ("dummy")
Kolonne am Ende.

-152-
Y
i \
\(A)
-? X
Für die Last Vorspannung:
Kolonne 46-55 : Exzentrizität am Anfang der Seite (EAZ)
Kolonne 56-65
Kolonne 66-75
Nächste Karten
in z-Richtung
Exzentrizität in Seitenmitte (EMZ)
in z-Richtung
Exzentrizität am Ende der Seite (EEZ)
in z-Richtung
Falls weitere Lasten im Belastungsfall vor¬
handen sind, werden zusätzliche Lastenkarten
angegeben.
2.10 Vorgeschriebene Rand- bzw. Knotenverschiebungen
Die Eingabe von festen Verschiebungen ist auch möglich. Bei
der Eingabe der Randbedingungen wurde gezeigt, dass bei der
Nullsetzung gewisser Verformungsparameter (Einspannung) oder

-153-
für eine elastische Einspannung der entsprechenden Verfor¬
mungen (Einführung einer Federung bei gewissen Verformungs¬
richtungen) ein Steifigkeitskoeffizient s angegeben wird.
Im Falle der Einspannung wird s ohne besondere Eingabe auto¬
matisch gleich 10 gesetzt. Für eine vorgeschriebene Ver¬
schiebung 8. kann man einfach bei den, mit s beeinflussten
Verformungsparametern eine konzentrierte Last P. = s. 8.
in Richtung der vorgeschriebenen Verformung 8. angeben.
2.11 Kombinationen von Belastungen
Für Kombinationen von Belastungen wiederholen wir die kom¬
plette Eingabe nach der Karte für die Steuerung der Ausgabe.
Gelesen wird, bis in Kolonne 1-5 eine Bezeichnung vorhanden
ist. (Maximal drei Karten werden interpretiert).
Nächste Karte
Kolonne 9-10
Nächste Karten
Kolonne 11-15
Kolonne 16-25
Kolonne 26-30
Kolonne 31-40
Kolonne 41-45
Kolonne 46-55
Kolonne 56-60
Kolonne 61-70
: Form der Belastung (A5,3X,A2)
: KO: Kombinationen
: höchstens drei Karten (AS,5X,4(I5.F10)) mit
maximal 12 Belastungsfallnummern und Werten,
mit denen die Resultate multipliziert werden.
: Nummer eines Belastungsfalles
: Wert, mit dem die Resultate dieses Belastungs¬
falles zu multiplizieren sind.
: Analog oben 11-15
: Analog oben 16-25
: Analog oben 11-15
: Analog oben 16-25
: Analog oben 11-15
: Analog oben 16-25

-154-
2.12 Abschlusskarten
Für den Abschluss des Problems (Jobs) folgen die Karten:
Kolonne 1-5 : ENDPR: Beginn der Berechnung
STOP : Ende des Problems.
Diese Karte kann allein stehen ohne
ENDPR-Karte. In diesem Falle wird nicht
gerechnet.

-155-
Anhang II
Numerierung Knoten Numerierung Schwerpunkte
Vorzeichenkonvention
MXy Nx
z-Axe

NOMENKLATUR
Skalare Grössen
¦156-
£1 • G2 . £3
ex ß
U
V
TT
X, y .
z
u,V
,w
«x. «y.^z > Xxy
Mx , My
Mxy
Sx Sy , Si
*xy
7
UI
t
E
V
Nx . Ny NXy
F
Natürliche dimensionslose
Dreieckkoordinaten
Schiefe Koordinaten
Formänderungsenergie (elastisches Potential)
Potential der äusseren Kräfte
Totale potentielle Energie (U+V)
des Tragwerkes
Koordinaten
Verschiebung in Richtung x,y,z
Dehnungen, Schiebung
Biegungsmomente pro Längeneinheit
Drillungsmoment
Normalspannungen
Schubspannung
Schiebung (u + v ) der Scheibe>y ix
Eckenrotation 1/2 (u + v ) der Scheibe»y I*
Plattendicke
Elastizitätsmodul
Poissons'sche Zahl
Scheibenkräfte pro Längeneinheit
Fläche

¦157-
L : Seitenlänge
e : Balkenexzentrizität
S : Statisches Moment (F.e)
Vektoren und Matrizen
: Vektor des lokalen Verschiebungszustandes
: Vektor der lokalen Elementverformungs¬
parameter
: Matrix der Elementansatzfunktionen
: Vektor der allgemeinen Dehnungen
: Vektor der allgemeinen Spannungen
: Matrix der abgeleiteten Ansatzfunktionen
für die Dehnungsverformungsbeziehungen
: Elastizitätsmatrix
: Lokale Elementsteifigkeitsmatrix
: Lokaler Lastvektor
: Lokale Elementsteifigkeitsmatrix für
diskrete Dehnungsparameter
PPe] : Matrix der Dehnungsansatzfunktionen
des Elementes
je} : Vektor der diskreten Dehnungsparameter
[T] : Transformationsmatrix
[s] : Spannungsmatrix
{fjj : Vektor der internen Verformungsparameter
|fej- : Vektor der externen Verformungsparameter
{»(«. y)}
{«•}
[*(X ,y)]
€ (X ,,y)
S(x ,,y)
LA*(x .y>]
[D]
M
{P}CK«]
-158-
{P,}
M
[Te3
[K°]
W[K]
{P}
Vektor der internen "konsistenten"
Elementbelastungen
Vektor der externen "konsistenten"
Elementbelastungen
Transformationsmatrix zwischen lokalen
und globalen Verformungsparametern
Globale Elementsteifigkeitsmatrix
Globaler Elementlastvektor
Globale Steifigkeitsmatrix des Systems
Globaler Belastungsvektor des Systems

-159-
LITERATUR
[1] Argyris, J.H.:
"Energy Theorems and Structural Analysis",
Butterworths, London 1960
Argyris, J.H.:
"ASKA An Automatic System for Kinematic Analysis,
Programmer's Manual", 1965
[2] Zienkiewicz, O.C., Holister, G.S.:
"Stress Analysis", J. Wiley, 1965
[3] Zienkiewicz, O.C.:
"The Finite Element Method", Mc Graw-Hill, 1967
[4] Rubinstein, M.F.:
"Matrix Computer Analysis of Structures",
Prentice Hall, 1967
[5] Washizu, K.:
"Variational Methods in Elasticity and Plasticity",
Pergamon Press, 1968
[6] Timoshenko, S.:
"Theory of Plates and Shells",
Mc Graw-Hill, sec. Ed., 1959
[7] Girkman, K.:
"Flächentragwerke", Springer, 6. Auflage, 1963
[8] Vlassov, V.Z., Leont'ev, M.N.:
"Beams Plates and Shells on Elastic Foundations" (tr.),
Jerusalem, 1966

-160-
[9] Morley, L.S.D.:
"Skew Plates and Structures", Pergamon Press, 1963
[10] Hanuska, A., Balas, J.:
"Influence Surface of Skew Plates",
Bauverlag, 1964
[11] Stiefel, E.:
"Einführung in die numerische Mathematik",
Teubner, Stuttgart, 1961
Schwarz, Rutishauser, Stiefel:
"Matrizen-Numerik", Teubner, Stuttgart, 1969
[12] Schuhmann, W.:
"Platten und Schalen", Vorlesung ETHZ, 1969
[13] Ziegler, H.:
"Energieverfahren", Vorlesung ETHZ, 1969
[14] Przemieniecki, J.S.:
"Theory of Matrix Structural Analysis",
Mc Graw-Hill, 1969
[15] "Proceedings of the First Conference on Matrix
Methods in Structural Mechanics",
Wright-Patterson Air Force Base AFFDL-TR-66-80,
Ohio, 1965
[16] "Finite Element Methods in Stress Analysis"
TAPIR, Trondheim, 1969
[17] "Proceedings of the Symposium on Application of
Finite Element Methods in Civil Engineering",
Nashville, Tennessee, Amer. Soc. of Civ. Eng.,
ed. by W.J. Rowan, 1969

-161-
[18] "Proceedings of the Second Conference on Matrix
Methods in Structural Mechanics",
Wright-Patterson Air Force Base, AFFDL-TR-68-150,
Ohio, 1968
[19] "Symposium on Highway Bridge Floors",
by Richart.F.E., Newmark.W.M., Siess.C.P.,
Proc. Amer. Soc. of Civ. Eng., pp. 287-353,
March 1948
[20] Felippa, CA.:
"Refined Finite Element Analysis of Linear and
Nonlinear Two-Dimensional Structures",
Berkeley, 1966 (Diss.)
[21] Carr, A.J.:
"A Refined Finite Element Analysis of Thin Shell
Structures Including Dynamic Loadings",
Berkeley, 1967 (Diss.)
[22] Mehrain, M.:
"Finite Element Analysis of Skew Composite
Girder Bridges",
Berkeley, 1967 (Diss.)
[23] GoSll, J.J.:
"Utilisation numßrique de la mithode de Ritz.
Application aux plaques",
EPUL Lausanne, 1967 (Diss.)

-162-
[24] Dubas, P.:
"Calcul numgrique des plaques et des parois mlnces"
ETHZ, 1955 (Diss.)
[25] Pfaffinger, D.:
"Berechnung polygonaler Platten mit verbesserten
Differenzengleichungen", ETHZ, 1970 (Diss.)
[26] Ergatoudis, H.G.:
"Iso-Parametric Finite Elements on Two- and
Three-Dimensional Analysis", Swansea, 1968 (Diss.)
[27] Engeli, M.:
"Automatische Behandlung elliptischer
Randwertprobleme", ETHZ, 1962 (Diss.)
[28] Turner, M.J., Clough, R.W.,
Martin, H.C. and Topp, L.Y.:
"Stiffness and Deflection Analysis of Complex
Structures", Aeron. Sciences, 23, pp. 805-8.23, 1956
[29] Melosh, R.J.:
"Basis of Derivation of Matrices for the
Direct Stiffness Method", J. AIAA, 1, p. 1631, 1963
Melosh, R.J.:
"A Stiffness Matrix for the Analysis of
Thin Plates in Bending",
J. Aeron. Seien., 28, 34, 1961
[30] Argyris, J.H.:
"Continua and Discontinua" in [15]
[31] Clough, R.W., Tocher, J.L.:
"Finite Element Stiffness Matrices for
Analysis of Plate Bending" in [15]
-163-
[32] Anderheggen, E. :
"Programme zur Methode der Finiten Elemente",
ETHZ, Institut für Baustatik, 1969
[33] Anderheggen, E., Alberti, G., Lässker, A.:
"Handbuch der STRESS-Sprache",
ETHZ, Institut für Baustatik, 2. Auflage 1969
[34] Bosshard, W.:
"Ein neues vollverträgliches endliches Element
für Plattenbiegung",
IVBH-Abhandlungen, 1968
[35] Bell, K. :
"A Refined Triangulär Plate Bending Finite Element",
Int. J. for Num. Meth. in Engin., Vol. 1, No. 1,
pp. 101-122, 1969
[36] Argyris, J.H., Fried I., Scharpf, D.W.:
"The TUBA Family of Plate Elements for the Matrix
Displacement Method",
The Aeron. J. of the Royal Aeron. Soc, Vol. 72,
Aug. 1968
Argyris, J.H., Scharpf, D.W.:
"The FUGA Family of Elements for Folded Plate
Structures",
The Aeron. J. of the Royal Aeron. Soc, Vol. 73,
July 1969
[37] Bergan, P.G.:
"Plane Stress Analysis Using the Finite Element Method.
Triangulär Element with 6 Parameters in each Node",
Div. of Struc. Mechanics, Techn. Univ. of Norway,
Trondheim, 1967

-164-
[38] Tocher, J.L.:
"Higher-Order Finite Element for Plane Stress",
J. Eng. Mech. Div., Vol. 93, EM 4, Aug. 1967
[39] Tuma, J.J., Alberti, G.F.:
"Static Parameter of Beams on Elastic Foundations",
IVBH-Abhandlung, 1970
[40] Pfaffinger, D., Thürlimann, B.:
"Tabellen für unterzugslose Decken",
Verlags-AG, Zürich, 1967
[41] Jensen, V.P.:
"Analysis of Skew Slabs",
Univ. of Illinois Bulletin, Vol. 39, No. 3,
Sept. 1941
[42] Jensen, V.P., Allen, J.W.:
"Studies of Highway Skew Slab-Bridges with Curbs",
Univ. of Illinois Bulletin, Vol. 45, No. 8,
Sept. 1947
[43] Melosh, R.J., Bamford, R.M.:
"Efficient Solution of Load-Deflection Equations",
J. of the Struct. Div. ASCE, Vol. 95, ST 4, Apr. 1969
Discussions:
Tezcan, S.S., Kostro, G., Felippa, CA.,
Tocher, J.C, Vol. 96, ST 2, pp. 421-426, Febr. 1970
[44] Irons, B.M.:
"A Frontal Solution Program for Finite Element Analysis",
Int. J. for Num. Math, in Eng., Vol. 2, pp.5-32, 1970
-165-
[45] Frederick, CO.:
"Two-Dimensional Automatic Mesh Generation for
Structural Analysis",
Int. J. for Num. Math, in Eng., Vol. 2, pp. 133-144, 1970
[46] Dünne, P.C.:
"Complete Polynomial Displacement Fields for Finite
Element Method",
The Aeron. J. of the Royal Aeron. Soc, Vol. 72,
pp. 245-246, March 1968
and Comment by Irons, Ergatoudis, Zienkiewicz, pp. 709-711
[47] Anderheggen, E.:
"Starr-plastische Traglastberechnung mittels der Methode
der endlichen Elemente" (Habilitationsschrift)
ETHZ, Institut für Baustatik, Bericht Nr. 32, Mai 1971
[48] Mazzario, A., Alberti, G.:
"Lösung von linearen Gleichungssystemen mit
variabler Bandbreite" (in Vorbereitung), 1971
[49] Rushton, K.R.:
"Electrical Analogue Solutions for the Deformation
of Skew Plates",
The Aeron. Quarterly, pp. 169-180, May 1964
[50] Favre, H.:
"Contribution ä l'Stude des plaques obliques",
Schweiz. Bauzeitung, 1942
Favre, H.:
"Le calcul des plaques obliques par la möthode
des' Squations aux diffSrences",
IVBH-Abhandl. 1943/44

-166-
[51] Lardy, P.:
"Die strenge Lösung des Problems der schiefen Platte",
Schweiz. Bauzeitung, 1949
[52] Rüsch, H.:
"Einflussfelder der Momente schiefwinkliger Platten",
München, 3. Auflage, 1969
[53] Riehle, W., Stein, E.:
"Die Berechnung von Zustands- und Einflussflächen
für die Schnittgrössen beliebiger Platten mit Hilfe
der Methode der finiten Elemente",
VDI-Z, Reihe 4, No. 14, Düsseldorf, April 1969
[54] Pucher,A. :
"Einflussfelder elastischer Platten"
Springer, 3. Auflage, 1964
[55] Collatz, L. :
"The Numerical Treatment of Differential Equations",
Springer, Berlin, 1966
[56] Bentsson, A., Wolf, J.P.:
"STRIP-Kunden Manuals STEP S",
Digital AG, Zürich, 1969
[57] Egg, K., Pestalozzi, U.:
"EASE-Handbuch", FIDES, Zürich, 1970
[58] Butlin, CA.:
Letter to editor for
"A Refined Triangulär Plate Bending Finite Element",
by Bell, K., Int. J. for Num. Meth. in Eng. Vol. 1,
p. 395, 1969

-167-
[59] Anderheggen, E.:
"Finite Element Plate Bending Equilibrium Analysis",
J. Eng. Mech. Div., Vol. 95, EM 4, pp.841-857,
Aug. 1969
[60] Kawai, T., Thürlimann, B.:
"Influence Surface for Moments in Slabs Continuous
over Flexible Cross Beams",
IVBH-Abhandlung, Bd. 17, 1957
[61] Mehmel, A., Weise, H.:
"Modellstatische Untersuchung punktförmig
gestützter schiefwinkliger Platten unter
besonderer Berücksichtigung der elastischen
Auflagernachgiebigkeit",
Deutscher Ausschuss für Stahlbeton, Heft 161,
Berlin, 1964
[62] Roy, J.R. :
"Numerical Error in Structural Solutions"
J. of the Structural Division, ASCE, Vol. 97,
ST4, Apr. 1971
[63] Wilkinson, J.H., Reinsch, C:
"Linear Algebra-Handbook for Automatic Computation,
Vol. II",
Springer, 1971