ResearchArticle Gaussian Qualitative Trigonometric...
10
Research Article Gaussian Qualitative Trigonometric Functions in a Fuzzy Circle M. Clement Joe Anand and Janani Bharatraj Department of Mathematics, Hindustan Institute of Technology and Science (Deemed to be University), Chennai 603103, India Correspondence should be addressed to M. Clement Joe Anand; [email protected] Received 15 November 2017; Revised 26 February 2018; Accepted 11 April 2018; Published 3 June 2018 Academic Editor: Erich Peter Klement Copyright © 2018 M. Clement Joe Anand and Janani Bharatraj. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. We build a bridge between qualitative representation and quantitative representation using fuzzy qualitative trigonometry. A unit circle obtained from fuzzy qualitative representation replaces the quantitative unit circle. Namely, we have developed the concept of a qualitative unit circle from the view of fuzzy theory using Gaussian membership functions, which play a key role in shaping the fuzzy circle and help in obtaining sharper boundaries. We have also developed the trigonometric identities based on qualitative representation by defining trigonometric functions qualitatively and applied the concept to fuzzy particle swarm optimization using -cuts. 1. Introduction e term “Trigonometry” was first coined as the title of a book (Trigonometria), which translates to “triangle’s mea- surement.” Although trigonometry is now taught with an emphasis on right triangles, its origin goes back to an era where it was used to determine the positions of celestial bodies and the distances between them and to understand the concept of chords in circles. Euclidean geometry, that is, planar geometry, deals with two-dimensional figures. e study of planar geometry provides constructions for planar figures, their properties, and the relationships between points, lines, and figures. e planar figure formed when a point traces a path at a fixed distance with respect to another fixed point called a circle, where the circle divides a plane into interior and exterior regions. Various theorems and properties on circles have been developed since time immemorial. Gradually, researchers have developed theories on inter- secting circles, which led to divergent properties between circular triangles and spherical triangles. e introduction of fuzzy sets and systems by Zadeh [1] changed the face of research in trigonometry. Fuzzy trigonometry was intro- duced by Buckley and Eslami [2], wherein continuous fuzzy numbers and sets were defined using the principle of exten- sion. is method formed the basis of fuzzy trigonometry but failed to satisfy many criteria and identities. Further- more, Ress [3] developed an approach for mapping standard trigonometric functions into the fuzzy realm. Using these modified fuzzy trigonometric functions, the proofs of a few inverse trigonometric identities, in addition to the standard identities, were given. A breakthrough in the study of fuzzy trigonometry was achieved by Liu et al. [4], with an aim of connecting symbolic cognitive functions to qualitative functions. e basic identities were satisfied, but a few properties could not be achieved. Ghosh and Chakraborty [5] proposed two methodologies for describing a fuzzy circle. e first methodology defines a circle as a set of points which are equidistant from a fixed point. e second methodology describes a circle using three fuzzy points. e definitions using both methods are as follows. (1) Considering fuzzy numbers plotted along various line segments which pass through a specific point (, ) which is fuzzy and located at a distance of from the fixed fuzzy point, then the fuzzy circle is defined as 1 =⋁ { }, (1) where the distance between and a random point on the support is always fixed. Hindawi Advances in Fuzzy Systems Volume 2018, Article ID 8623465, 9 pages https://doi.org/10.1155/2018/8623465
Transcript of ResearchArticle Gaussian Qualitative Trigonometric...

Research ArticleGaussian Qualitative Trigonometric Functions in a Fuzzy Circle
M Clement Joe Anand and Janani Bharatraj
Department of Mathematics Hindustan Institute of Technology and Science (Deemed to be University) Chennai 603103 India
Correspondence should be addressed to M Clement Joe Anand arjoemiyahoocom
Received 15 November 2017 Revised 26 February 2018 Accepted 11 April 2018 Published 3 June 2018
Academic Editor Erich Peter Klement
Copyright copy 2018 M Clement Joe Anand and Janani Bharatraj This is an open access article distributed under the CreativeCommons Attribution License which permits unrestricted use distribution and reproduction in any medium provided theoriginal work is properly cited
We build a bridge between qualitative representation and quantitative representation using fuzzy qualitative trigonometry A unitcircle obtained from fuzzy qualitative representation replaces the quantitative unit circle Namely we have developed the conceptof a qualitative unit circle from the view of fuzzy theory using Gaussian membership functions which play a key role in shapingthe fuzzy circle and help in obtaining sharper boundaries We have also developed the trigonometric identities based on qualitativerepresentation by defining trigonometric functions qualitatively and applied the concept to fuzzy particle swarmoptimization using120572-cuts
1 Introduction
The term ldquoTrigonometryrdquo was first coined as the title of abook (Trigonometria) which translates to ldquotrianglersquos mea-surementrdquo Although trigonometry is now taught with anemphasis on right triangles its origin goes back to an erawhere it was used to determine the positions of celestialbodies and the distances between them and to understandthe concept of chords in circles Euclidean geometry thatis planar geometry deals with two-dimensional figuresThe study of planar geometry provides constructions forplanar figures their properties and the relationships betweenpoints lines and figures The planar figure formed whena point traces a path at a fixed distance with respect toanother fixed point called a circle where the circle dividesa plane into interior and exterior regions Various theoremsand properties on circles have been developed since timeimmemorial
Gradually researchers have developed theories on inter-secting circles which led to divergent properties betweencircular triangles and spherical triangles The introductionof fuzzy sets and systems by Zadeh [1] changed the faceof research in trigonometry Fuzzy trigonometry was intro-duced by Buckley and Eslami [2] wherein continuous fuzzynumbers and sets were defined using the principle of exten-sion This method formed the basis of fuzzy trigonometry
but failed to satisfy many criteria and identities Further-more Ress [3] developed an approach for mapping standardtrigonometric functions into the fuzzy realm Using thesemodified fuzzy trigonometric functions the proofs of a fewinverse trigonometric identities in addition to the standardidentities were given A breakthrough in the study of fuzzytrigonometry was achieved by Liu et al [4] with an aimof connecting symbolic cognitive functions to qualitativefunctions The basic identities were satisfied but a fewproperties could not be achieved Ghosh and Chakraborty[5] proposed twomethodologies for describing a fuzzy circleThe first methodology defines a circle as a set of points whichare equidistant from a fixed point The second methodologydescribes a circle using three fuzzy points The definitionsusing both methods are as follows
(1) Considering fuzzy numbers plotted along various linesegments which pass through a specific point (119886 119887)which is fuzzy and located at a distance of 119903 from thefixed fuzzy point then the fuzzy circle is defined as
1198621 = ⋁120579
119861120579 (1)
where the distance between 119861120579 and a random pointon the support is always fixed
HindawiAdvances in Fuzzy SystemsVolume 2018 Article ID 8623465 9 pageshttpsdoiorg10115520188623465
2 Advances in Fuzzy Systems
(2) Considering three fuzzy points the fuzzy circle isdrawn by passing the circle through these threepoints and the supremum of the membership valuesdefines the fuzzy circle which was proposed
Technology in todayrsquos world needs advanced level proceduresor heuristics which involve few or zero assumptions about theproblem being optimized The need for metaheuristics hasmany advantages over other algorithms with one advantagebeing its ability to search very large candidate solutionsspaces Particle swarm optimization (PSO) is one suchmetaheuristic method which allows optimization based oniterations which in turn helps in improving the candidatesolution The solution is improved by creating a populationof candidate solutions (ie particles) andmaking themmovearound in the search-space taking into consideration theirpositions and velocities The movement of the particle isinfluenced by its local best known position simultaneouslybeing guided towards the best known position in the searcharea These are updated time-to-time for all other particlesto form a swarm PSO was first introduced by Kennedy et alwith an intention of simulating the social behaviour in a flockof birds or a school of fish Shi and Eberhart [6] developedan optimization technique for fuzzy systems by dynamicallyadjusting the inertia weight improving PSOrsquos performancePang et al [7] utilized fuzzy discrete PSO to solve theTravelling salesman problem Abdelbar et al [8] comparedthe behaviour of the Gaussian and Cauchy membershipfunctions in fuzzy PSO and concluded that the Cauchymembership functions are best suited for fuzzy PSO Itwas noted that traditional PSO converges prematurely whenapplied as a global optimization technique To prevent thisdownfall Anantathanavit and Munlin [9] proposed radius(R-PSO) as an extension of standard PSO R-PSO regroupsthe particles into a circle of the given radius and determinesthe best agent particle of the group The experiment resultsproved that R-PSO performed better than traditional PSOwhen solving multimodal complex problems
To produce wholesome proofs for identities based onfuzzy trigonometric functions we introduce the Gaussianqualitative trigonometric functions (GQTFs) on a fuzzycircle The unit fuzzy circle is defined using Gaussianmembership function (GMF) partitions Using the GMFcircumference fuzzy centre and fuzzy point on the circletrigonometric functions and their identities are successfullydeveloped In this paper we use the advantages of R-PSO andGMFs to define a fuzzy R-PSO based on a fuzzy qualitativecircle Section 2 gives the preliminaries and introduces theconcept of GQTFs on the fuzzy circle Section 3 providesinsight on the formation of the fuzzy centre and fuzzypoint on the circle and provides a broad perspective ofthe redefined trigonometric functions their ratio identitiestheir Pythagorean identities their Taylorrsquos series expansionstheir differentials and laws for obtaining the solutions oftriangles Section 4 describes the properties of intersectingfuzzy circles and Section 5 describes the PSO with fuzzymatrices Section 6 describes fuzzy R-PSO with GMF whichmakes an efficient model for finding the best agent FinallySection 7 concludes the paper
00 1 2 3 4 5 6 7 8 9 10
01
02
03
04
05
06
07
08
09
1
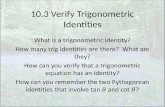
Figure 1 GMF with 119888 = 5 and 120590 = 2
2 Prerequisites
The prerequisites required for the developed concept havebeen taken from various research articles which are cited inthe references Slightlymodified versions of the concepts havebeen given in this section
21 Fuzzy Subset Considering a set 119864 which is either finiteor infinite for every element 119909 in 119864 the set consisting of allordered pairs of the form (119909 120583119860(119909)) is called a fuzzy subsetdenoted by 119860 in 119864 Here 120583119860(119909) is called the membershipfunction The membership function gives a mapping of theelements in set 119864 to the membership set119872
22 Zadehrsquos Extension Principle Considering a fuzzy subsetof a universal set 119864 if 119891 119864 rarr 119885 is a function then theextension principle generates a function 119891 whose member-ship function is defined over the supremum of all 119891minus1(119911) = 0that is
120583119891 (119911) = sup119891minus1(119911)
120583119860 (119909) 119909 isin 119864 (2)
Here 119891minus1 is the preimage of 119911 in 11986423 Gaussian Membership Function (GMF) The GMF isgiven by
119866119898119891 (119909 119888 120590) = exp[minus(119888 minus 119909)221205902 ] (3)
where 119888 and 120590 are the centre and width of the fuzzy setrespectively An example of this function is shown in Figure 1This membership function is also defined in terms of theinterval [119898 119895] as follows
119866119898119891 (119909 119898 119895) = exp[minus(119895 minus 119909)221198982 ] (4)
Advances in Fuzzy Systems 3
Table 1 Arithmetic operations
Slno Operation Notation Result1 Sum [119898 119888] + [119895 119886] [119898 + 119895 119888 + 119886]2 Difference [119898 119888] minus [119895 119886] [119898 minus 119886 119888 minus 119895]3 Product [119898 119888] times [119895 119886] [119898 times 119895 119888 times 119886]4 Quotient [119898 119888] divide [119895 119886] [119898 divide 119886 119888 divide 119895]
The GMF with fuzzification factorm is given by
119866119898119891 (119909 119888 120590119898) = exp [minus(119888 minus 119909)1198982120590119898 ] (5)
24 Arithmetic Operations on GMFs TheArithmetic Opera-tions on GMFs can be summarised as follows
Letting 119866119898119891(119909 119898 119888) and 119866119898119891(119909 119895 119886) be two GMFstheir arithmetic operations are shown in Table 1
3 Proposed Method
FuzzyGaussian qualitative coordinates are proposed to facili-tate the geometrical interpretation of GQTFs To achieve thiswe first define a fuzzy circle obtained using GMFs
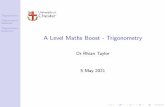
31 Gaussian Qualitative Coordinates The 119909- and 119910-axes aredefined for a unit circle For the sake of simplicity and easeof use the abscissa and ordinate are first considered as reallines Figure 2 describes the circumference of the fuzzy unitcircle which is obtained by partitioning the circumferenceinto GMFs The cloud formation as described by Ghosh andChakraborty [10] is now refined to obtain sharp boundariesfor the circle The crisp centre of the circle has a neigh-bourhood which is formed by extending and converging thecore area of every GMF towards the centre of the circleThus the centre of the derived fuzzy circle will have infinitelymany sides depending on the number of partitions We canhenceforth generalise the centre to be an infinitesimal circlewith an infinitesimal radius that is 11989732 Fuzzy Centre and Position of a Point The values of 119886and 119887 obtained on the circumference of the fuzzy circle arenow extended towards the core of the circle Without lossof generality a point on the proposed fuzzy circle can beassumed to be the centre of someGMFTheposition of a pointcan be mapped as shown in Figure 3
33 Trigonometric Functions The graphs of sine cosineand tangent functions under the proposed concept havebeen obtained and verified to be in coherence with thecrisp trigonometric functions Various identities and laws fortriangles are presented as follows
331 Ratio Identities
(i) sin (119866119898119891[minus120575 120575]) = 119866119898119891[119886119910 119887119910]119866119898119891[radic(119886119909 minus 1198860)2 + 1198862119910 radic(119887119909 minus 1198870)2 + 1198872119910]
minus03minus03
minus02
minus02
minus01
minus01
0
0
01
01
02
02
03
03
Figure 2 Fuzzy circle with Gaussian membership function
[a b]
[a0 b0] [ax bx]
[ay by]
x
y
Figure 3 Coordinates of a point on the fuzzy circle
(ii) cos (119866119898119891[minus120575 120575]) = 119866119898119891[1198860 minus 119887119909 1198870 minus 119886119909]119866119898119891[radic(119886119909 minus 1198860)2 + 1198862119910 radic(119887119909 minus 1198870)2 + 1198872119910](iii) tan (119866119898119891[minus120575 120575]) = 119866119898119891[119886119910 119887119910]119866119898119891[1198860minus119887119909 1198870minus119886119909]
332 Pythagorean Identities
(i) sin2 (119866119898119891[minus120575 120575]) + cos2 (119866119898119891[minus120575 120575]) = 119866119898119891[1 minus120575 1 + 120575](ii) sec2 (119866119898119891[minus120575 120575]) minus tan2 (119866119898119891[minus120575 120575]) = 119866119898119891[1 minus120575 1 + 120575](iii) csc2 (119866119898119891[minus120575 120575]) minus cot2 (119866119898119891[minus120575 120575]) = 119866119898119891[1 minus120575 1 + 120575]
4 Advances in Fuzzy Systems
333 Laws for Obtaining Solutions to Triangles
(i) The law of sines gives the relationship between thesines of the angles of a triangle and the lengths of thesides of the triangle
sin (119866119898119891 [120579119910 minus 120575119891 120579119910 + 120575119891])119866119898119891 [119886119910 119887119910]= sin (119866119898119891 [120579119909 minus 120575119891 120579119909 + 120575119891])119866119898119891 [119886119909 119887119909]= sin (119866119898119891 [120579119911 minus 120575119891 120579119911 + 120575119891])119866119898119891 [119886119911 119887119911]
(6)
(ii) The law of cosines relates the sides of a triangle withthe cosine of an angle in the triangle
(1) 119866119898119891[119886119909 minus119887119910 119886119910 minus119887119909]2 = 119866119898119891[119888119909 minus119887119910 119888119910 minus119887119909]2 +119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 minus 2119866119898119891[119888119909 minus 119887119910 119888119910 minus 119887119909] times119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909] times cos (119866119898119891[119862 minus 120575 119862 + 120575])(2) 119866119898119891[119888119909 minus 119887119910 119888119910 minus 119887119909]2 = 119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 +119866119898119891[119886119909minus119887119910 119886119910minus119887119909]2minus2times119866119898119891[119886119909minus119888119910 119886119910minus119888119909]times119866119898119891[119886119909 minus 119887119910 119886119910 minus 119887119909] times cos (119866119898119891[119860 minus 120575 119860+ 120575])(3) 119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 = 119866119898119891[119887119909 minus 119888119910 119887119910 minus 119888119909]2 +119866119898119891[119886119909minus119887119910 119886119910minus119887119909]2minus2times119866119898119891[119887119909minus119888119910 119887119910minus119888119909]times119866119898119891[119886119909 minus 119887119910 119886119910 minus 119887119909] times cos (119866119898119891[119861 minus 120575 119861 + 120575])
(iii) The law of tangents gives the relationship between thesides and tangents of the angles of a triangle
119866119898119891 [119887119909 + 119888119909 minus (119886119910 + 119888119910) 119887119910 + 119888119910 minus (119886119909 + 119888119909)]119866119898119891 [119887119909 + 119886119909 minus 2119888119910 119887119910 + 119886119910 minus 2119888119909]= tan ((12) 119866119898119891 [119860 minus 119861 minus 2120575 119860 minus 119861 + 2120575])tan ((12) 119866119898119891 [119860 + 119861 minus 2120575 119860 + 119861 + 2120575])
(7)
334 Mollweidersquos Identity This identity is a tool for checkingthe solutions of triangles It uses all sides and angles of thetriangle
119866119898119891 [119886119909 + 119887119909 minus 2119888119910 119886119910 + 119887119910 minus 2119888119909]119866119898119891 [119886119909 minus 119887119910 119886119910 minus 119887119909]= cos ((12) 119866119898119891 [119860 minus 119861 minus 2120575 119860 minus 119861 + 2120575])
sin ((12) 119866119898119891 [119862 minus 120575 119862 + 120575]) (8)
34 Taylorrsquos Series Expansions of Trigonometric FunctionsThe Taylorrsquos series expansions of the trigonometric functionsare as follows
(i) cos(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = [1 minus (119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 + 120575119898119891])22 + (119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 +120575119898119891])44 ∓ sdot sdot sdot ]
Thus cos(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[cos(119909119898119891 minus 120575119898119891) minus Δ119898119891 cos(119909119898119891 minus 120575119898119891) + Δ119898119891]where Δ119898119891 = 2suminfin119899=246(((119909119898119891 + 120575119898119891)119899 + (119909119898119891 minus120575119898119891)119899)119899)
(ii) [sin(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = 119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 +120575119898119891] minus (119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 +120575119898119891])33 +(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891])55 ∓ sdot sdot sdot ]Thus [sin(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[sin(119909119898119891minus120575119898119891)minusΔ 1 sin(119909119898119891minus120575119898119891)+Δ 1]] whereΔ 1 = 2suminfin119899=135(((119909119898119891 + 120575119898119891)119899 + (119909119898119891 minus 120575119898119891)119899)119899)
(iii) tan(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = 119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 + 120575119898119891] + (13)119866119898119891[(119909119898119891 minus 120575119898119891)3 (119909119898119891 +120575119898119891)3] + (25)119866119898119891[(119909119898119891 minus 120575119898119891)5 (119909119898119891 + 120575119898119891)5] + sdot sdot sdotThus [tan(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[tan(119909119898119891 minus 120575119898119891) tan(119909119898119891 + 120575119898119891)]]
35 Differentiation of the Gaussian Trigonometric FunctionsThe trigonometric functions thus obtained are also fuzzydifferentiable Supposing that 119865(119909) = 119891(119866119898119891[119888 120590]) is a Gaus-sian fuzzy trigonometric function then the derivatives of thefunction are as follows
First Derivative 1198651015840(119909) = 1198911015840(119866119898119891[119888 120590]) times exp(minus119909221205902) times(minus1199091205902)The second and higher order derivatives are obtained by
using the chain rule for the above functions
4 Intersection of Fuzzy Circles
We now introduce the concept of intersecting fuzzy circlesand study their structure and properties while comparingthem with regular intersecting circles
41 Circles Touching at Exactly One Point
Case 1 Two circles have an equal number of partitionsimplying that the radii of both circles are equal Figure 4shows the fuzzified point of intersection
In Figure 4 we observe that the centres of both Gaussiancurves intersect at a crisp point The fuzzified areas of theintersection are congruent trianglesThe area of each triangleis given by 119865119905119886 = 12 times (2119903) times 120590 = 119903 times 120590 Thus the total fuzzyarea is 2119903120590Case 2 The number of partitions on the intersecting circlesis unequal as shown in Figure 5
We observe that the crisp point of intersection is obtainedwhere the centres of both Gaussian curves meet The pointof intersection is bounded by triangles whose areas are givenby
Area of Δ 1 = 12 times 1205901 times (1199031 + 1205901) =1205901 (1199031 + 1205901)2
Area of Δ 2 = 12 times 1205901 times (1199031 minus 1205901) =1205901 (1199031 minus 1205901)2
Advances in Fuzzy Systems 5
[c2 2]
[c1 1]
Figure 4 Circles of equal radii touching at a single point
[c2 2] [c1 1]
Figure 5 Circles of unequal radii touching at a single point
Area of Δ 3 = 12 times 1205902 times (1199032 + 1205902) =1205902 (1199032 + 1205902)2
Area of Δ 4 = 12 times 1205902 times (1199032 minus 1205902) =1205902 (1199032 minus 1205902)2
(9)
Hence the total area is = 11990311205901 + 11990321205902 The area obtained is incoherence with the traditional way of determining the area ofintersection
The intersection of circles becomes interesting when weconsider circles intersecting at two points In such a case thearea of intersection can be either symmetric or dominate asingle circle with a small portion of the second circle as acommon area
42 Fuzzy Circles Intersecting at Two Points
Case 1 Two circles have an equal number of partitions Fig-ure 6 shows the intersecting fuzzy circles From the followingdiagram we observe that the crisp points of intersectionand the common chord are obtained during the fuzzificationprocess We obtain congruent triangles in the fuzzy areaof intersection The centres of the Gaussian curves meet toproduce the crisp point of intersectionThe two points when
[c2 2] [c1 1]
Figure 6 Intersecting circles of equal radii
[c2 2] [c1 1]
Figure 7 Intersecting circles of unequal radii
joined produce the crisp common chord for the intersectingcircles
The area of the overlapping region is calculated as follows
(i) The area of each sector is (119903minus times 120579)2(ii) The length of the arc of the sector is given by 119903 times 120579(iii) Thus the area of the fuzzified sector is (1199032+ times 120579)2(iv) The area of the smaller sector is (1199032minus times 120579)2 Here 119903+ =119903 + 120590 and 119903minus = 119903 minus 120590(v) Supposing the line 119903+ cuts the smaller radius in the
ratio119898 119899 then119898 = 119903+2Thus the area is (1199032+times1205791)4and the total area is 1199032+2 times (2120579 + 1205791)
Case 2 Two circles have an unequal number of partitionswhich implies that the radii of both circles are different(Figure 7)
The area of the bigger fuzzy sector is (1199032 times 120579)2 + (1199032 times1205791)4 = (11990324)(2120579 + 1205791)Similarly the area of the smaller fuzzy sector is (119903214)(2120575+1205751)
6 Advances in Fuzzy Systems
Thus in both cases we obtain a fuzzy diagram boundedby ten points The area of the overlapping section is obtainedusing the following formulas
Areafuzzy = 1Disradic119862 times 119869 times 119860 times119872
119862 = (minusDis + rad1 + rad2) 119869 = (Dis minus rad1 + rad2) 119860 = (Dis + rad1 minus rad2) 119872 = (Dis + rad1 + rad2)
(10)
where Dis = [1198741 minus 1198742 minus (1205901 + 1205902) 1198741 minus 1198742 + (1205901 + 1205902)] is thedistance between the centres and rad1 = [1199031 minus1205901 1199031 +1205901] andrad2 = [1199032 minus 1205902 1199032 + 1205902] are the Gaussian radii of the fuzzycircles
43 Intersection of Three Fuzzy Circles Three circles canintersect in many ways but we consider two special caseswherein we obtain circular triangles and irregular con-vex quadrilaterals However we must check whether anoverlapping area exists between the considered circles Toverify we check if either of the following conditions aresatisfied
(i) A point of intersection of two circles should be a pointinside the third circle
(ii) One of the circles should be engulfed completelyinside another circle
Case 1 Three fuzzy circles with equal numbers of parti-tions are considered implying that the radii of all threecircles are equal The overlapping area formed by thethree segments and an inner triangle whose sides are thearcs of the three circles is called a circular triangle (Fig-ure 8)
The area of the triangle is calculated using Heronrsquosformula
Area119886119887119888 = radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862) (11)
where 119878 = (12)(119860 + 119861 + 119862) 119860 = 119866119898119891[119886119909 119886119910] 119861 =119866119898119891[119887119909 119887119910] and 119862 = 119866119898119891[119888119909 119888119910]The area of the combinedoverlap is given by
Areaseg = 3sum119899=1
1198772119899sinminus1 ( 1198602119877119899) minus3sum119899=1
1198604 radic4 times 1198772119899 minus 1198602+ radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862)
(12)
Case 2 Three fuzzy circles with unequal numbers of parti-tions will have different radii In this case wemust recalculatethe overlapping segment area using the area of the biggercircle (Figure 9)
[c2 2]
[c3 3]
[c1 1]
Figure 8 Circles of equal radii intersecting and forming a circulartriangle
Step 1 We find the midpoint of the chord in the segmentwhich is given by
119909mid = 11990911989412 + 119909119894132 119910mid = 11991011989412 + 119910119894132 (13)
Step 2 We then find the equation of the line joining themidpoint and the centre of the circle which is given by
119910 = 1198611 minus 119910mid1198601 minus 119909midtimes 119909 minus 119909mid (1198611 minus 119910mid)1198601 minus 119909mid
+ 119910mid (14)
Step 3 Next we determine the points of intersection of theabove line and circle which are given by 11988311989411988811198941198882 = (1198861 + 1198871 times119898 minus 119898 times 119899 plusmn radic120575)(1 + 1198982) 11988411989411988811198941198882 = (119899 + 1198861 times 119898 + 1198871 times1198982 plusmn 119898 times radic120575)(1 + 1198982) where119898 = (1198611 minus 119910mid)(1198601 minus 119910mid)119899 = (minus119909mid times (1198611 minus 119910mid))(1198601 minus 119909mid) + 119910mid
Step 4 Finally we check whether the other two radii of thecircles are greater than the distance between the centre andthe midpoint
Thus the area of the bigger segment completely encom-passed by the bigger circle is (119877212)(1205791 minus sin 1205791)Results
(i) The regions of intersection of three equal fuzzy circleshave been considered Hence the common value ofradii has been denoted by R Here R denotes thecommon radii
(ii) Given three intersecting fuzzy circles the lines joiningthe points of intersection outside the circular trianglesatisfy 119860119862119864 = 119861119863119865 which defines Harukirsquos theorem
Advances in Fuzzy Systems 7
(Xic1 Yic1)(xi13 yi13)
(xGC> yGC>)(Xic2 Yic2)
(xi12 yi12)
Figure 9 Three intersecting circles of unequal radii
P
Q
Figure 10 Formation of irregular convex quadrilateral
(iii) The crisp circle which touches the inner circles ofthe circular triangle and its neighbouring triangles iseither tangent to the innermost circle and internallytangent to the inner circles of the neighbouringtriangles or vice versa Such a circle is called theldquoHartrsquos circlerdquo We can construct 8 such Hart circlesfor a given circular triangle
Case 3 The most complex case is that of an overlappingarea which is obtained when the circular segments form theboundary shown in Figure 10 In the process we obtain anirregular convex quadrilateral
The area of the irregular convex quadrilateral is given byAreaquad = (12)119875 times 119876 times sin120601 where 120601 is the angle betweenthe diagonals 119875 and 119876
Hence the combined area of the segments is given by
Area = sum119899=1
41198772119899sinminus1 ( 1198601198992 times 119877119899)
minus 4sum119899=1
1198601198994 radic4 times 1198772119899 minus 1198602119899(15)
Here 119860119899 is the length of the chord joining the points ofintersection of the circles There are four chords which formthe edges of the convex quadrilateral And 119877119899 is the radii ofthe circles
5 Fuzzy Particle Swarm Optimization (PSO)with Fuzzy Matrices and GMFs
51 FuzzyMatrices Amatrix of the form119875 = [119901119894119895120583]119898times119899 where119901119894119895120583 is the membership degree of the element 119901119894119895 isin is calleda fuzzy matrix
In PSO a finite number of particles define a swarmThe particles move in the 119899-dimensional space with certainvelocityThe particlersquos velocity and position are updated usingthe following formula
119881119896+1119894 = 119908 otimes 119881119896119894 oplus (1198881 otimes 119903 (sdot)) otimes (119875119896119894 ⊖ 119883119896119894 ) oplus sumℎisin120578(119894119896)
1198882otimes 119903 (sdot) otimes 120595 (119901ℎ) (119875119896119892 ⊖ 119883119896119894 )
(16)
where 120578(119894 119896) denotes the 119896 best particles in the neigh-bourhood of the particle and 120595(119901ℎ) denotes the matrixcontaining the corresponding membership degrees of theparticles defined using the GMF
8 Advances in Fuzzy Systems
52 Particle Position Initialization The positions of the par-ticles are initialized and represented in the form of a fuzzymatrix The position matrix is given by
119875119903119894119895 = [[[[[
11990111990311 11990111990312 sdot sdot sdot 1199011199031119899 d
1199011199031198991 1199011199031198992 sdot sdot sdot 119901119903119899119899]]]]] (17)
The positions of the particles for the fuzzy matrix aregenerated randomly and satisfy the following conditions
119899sum119895=1
119901119903119894119895 = 1 119875119903119894119895 isin [0 1] 119894 = 1 2 119899 (18)
53 Particle Velocity Initialization The velocity matrix isgiven by
119881119903119894119895 = [[[[[
V11990311 V11990312 sdot sdot sdot V1199031119899 d
V1199031198991 V1199031198992 sdot sdot sdot V119903119899119899
]]]]] (19)
where the velocities of the particles are generated accordingto the randomly generated position of the particles withconditions
119899sum119895=1
V119903119894119895 = 0 119894 = 1 2 119899 (20)
54 Normalization of the Particle Position Matrix The par-ticle position matrix generated using random positions maysometimes not adhere to the constraint 119875119903119894119895 isin [0 1] Hencewe need to normalize the particle position matrix The firststep in normalization involves replacing all negative values inthe matrix with zeros Then the matrix is transformed into
119875119903119894119895 =[[[[[[[
11990111990311sum119899119894=1 119901119903111989411990111990312sum119899119894=1 1199011199031119894 sdot sdot sdot
1199011199031119899sum119899119894=1 1199011199031119894 d1199011199031198991sum119899119894=1 119901119903119899119894
1199011199031198992sum119899119894=1 119901119903119899119894 sdot sdot sdot119901119903119899119899sum119899119894=1 119901119903119899119894
]]]]]]] (21)
55 Choosing the Best Agentswith120572-levels Theagent particlesare now selected based on the value of 120572 where 120572 is a realnumber in the interval [0 1] Once the agent particles areselected they are placed on the circumference of the circle ofradius 120572 Furthermore the global best position of the particleis calculated using the distance formula
119889 (119901119903119894119895 119901119903119908119895)= 18 (120590)2
119899sum119894=1
[(120583119901119903119894119895 (119909119894) minus 120583119901119903119908119895 (119909119894))2 + (1198881 minus 1198882)2] 119889 le 2120572
(22)
This process is illustrated in Figure 11
minus03minus03
minus02
minus02
minus01
minus01
0
0
01
01
02
02
03
03
Pr11
Pr12
Pr13
Figure 11 Neighbourhood for obtaining the global best agent
6 Algorithm for Fuzzy R-PSO with GMFs
The proposed algorithm provides the local best position ofparticles based on the threshold as given in Figure 12
(1) Start(2) Initialize maximum number of particles in the target
neighbourhood max119901 maximum number of itera-tions max119899
(3) Assign random position and velocity matrices for theparticles
(4) For 119894 = 0 to max119901
(a) Calculate positions and velocities of the parti-cles as given in the equation
(b) Normalize the particle positionmatrix using theequation
(5) Fix the 120572-level for the normalized particle positionmatrix
(6) If a particlersquos position in the normalized matrix is le120572then update the first neighbourhood circle
(7) Calculate the distance between the particles andlocate the global best position
(8) Stop
7 Discussion and Conclusion
The proposed methodology of constructing a fuzzy qual-itative circle with GMF provides a smoother graphs offuzzy trigonometric functions when compared to previouslydescribed methods The graphs of the curves as obtained byKaufmann and Gupta [11] flatten either the min- or max-curve depending upon the point of inflection which led toa restriction on the extent of the spread in terms of angular
Advances in Fuzzy Systems 9
minus500 minus400 minus300 minus200 minus100 0 100 200 300 400 500minus400
minus300
minus200
minus100
0
100
200
300
4004 cell
distancevelocity
Figure 12 Neighbourhood obtained using 120572-cuts
measurements This angular spread has now been definedin terms of 120590 which is the width of the GMF When 120590 =0 the Gaussian Fuzzy Circle reduces to the conventionalcrisp circle The centre of the fuzzy circle is also fuzzyand the radius is a linear combination of fuzzy numbersAlso we have demonstrated geometrical interpretation of theGQTFs and the representation of a fuzzy circle with 119899 =25GMFsThe position of a point on the fuzzy circle has beenexplained Trigonometrical identities Pythagorean identitiesand laws for obtaining solutions to triangles (ie law ofsines law of cosines and law of tangents) have been derivedThe GMFs on a fuzzy circle and Taylorrsquos series expansionshave been verified The relationship between qualitative andquantitative trigonometric states is very difficult to describehowever Gaussian fuzzy qualitative trigonometry helps indescribing their relationship In this paper we have success-fully described the intersection of fuzzy circleswhen the circleis divided into either equal or unequal numbers of partitionsand a study of circular triangles has been given The resultson circular triangles have also been verified This researcharticle gives a theoretical interpretation of applying R-PSOinside a fuzzy circle The R-PSO with fuzzy circle of radius 120572(developed using120572-cuts) reduced the premature convergenceof the standard PSO algorithm By fixing various levels of120572 global best position of the particles can be obtainedFurthermore the development of fuzzy circles with partitionsprovides a sharper boundary when compared to the existingideas of fuzzy circles and fuzzy qualitative circles
71 Future Direction The authors intend to implement thisidea in designing a navigation stick using the concept of radarWe propose to utilize this concept in designing navigationsystems for people with special needs Further this researchbeing an extension to fuzzy qualitative trigonometry will beimplemented in extensive research towards robot kinematicsand human movement analysis
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank Editage (httpswwweditagecom) for English language editing andMr MohamedE for his timely help in developing the R-PSO for fuzzy circlealgorithm using Matlab
References
[1] L A Zadeh ldquoFuzzy setsrdquo Information and Computation vol 8pp 338ndash353 1965
[2] J J Buckley and E Eslami An Introduction to Fuzzy Logicand Fuzzy Sets Physica-Verlag Heidelberg NewYork NY USA2002
[3] D A Ress Development of Fuzzy Trigonometric Functionsto support design and manufacturing [PhD Thesis] NorthCarolina University North Carolina NC USA 1999
[4] H Liu G M Coghill and D P Barnes ldquoFuzzy qualitativetrigonometryrdquo International Journal of Approximate Reasoningvol 51 pp 371ndash388 2009
[5] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIrdquo Fuzzy Sets and Systems vol 209 pp 66ndash83 2012
[6] Y Shi and R Eberhart ldquoFuzzy Adaptive Particle SwarmOptimizationrdquo in Proceedings of the Congress on EvolutionaryComputation pp 101ndash106 2001
[7] W Pang K Wang C Zhou and L Dong ldquoFuzzy discreteparticle swarm optimization for solving traveling salesmanproblemrdquo in Proceedings of the 4th International Conference onComputer and Information Technology (CIT rsquo04) pp 796ndash8002004
[8] A M Abdelbar S Abdelshahid and D C Wunsch ldquoGaussianversus Cauchy membership functions in fuzzy PSOrdquo in Pro-ceedings of the 2007 International Joint Conference on NeuralNetworks IJCNN rsquo07 August 2007
[9] M Anantathanavit and M-A Munlin ldquoRadius particle swarmoptimizationrdquo in Proceedings of the 17th International ComputerScience and Engineering Conference ICSEC rsquo13 pp 126ndash130September 2013
[10] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIIIrdquo Fuzzy Sets and Systems vol 283 pp 83ndash107 2016
[11] A Kaufmann and M M Gupta Introduction to Fuzzy Arith-metic Theory and Applications Van Nostrand Reinhold NewYork NY USA 1985
Computer Games Technology
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
Advances in
FuzzySystems
Hindawiwwwhindawicom
Volume 2018
International Journal of
ReconfigurableComputing
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
thinspArtificial Intelligence
Hindawiwwwhindawicom Volumethinsp2018
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawiwwwhindawicom Volume 2018
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Computational Intelligence and Neuroscience
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018
Human-ComputerInteraction
Advances in
Hindawiwwwhindawicom Volume 2018
Scientic Programming
Submit your manuscripts atwwwhindawicom

2 Advances in Fuzzy Systems
(2) Considering three fuzzy points the fuzzy circle isdrawn by passing the circle through these threepoints and the supremum of the membership valuesdefines the fuzzy circle which was proposed
Technology in todayrsquos world needs advanced level proceduresor heuristics which involve few or zero assumptions about theproblem being optimized The need for metaheuristics hasmany advantages over other algorithms with one advantagebeing its ability to search very large candidate solutionsspaces Particle swarm optimization (PSO) is one suchmetaheuristic method which allows optimization based oniterations which in turn helps in improving the candidatesolution The solution is improved by creating a populationof candidate solutions (ie particles) andmaking themmovearound in the search-space taking into consideration theirpositions and velocities The movement of the particle isinfluenced by its local best known position simultaneouslybeing guided towards the best known position in the searcharea These are updated time-to-time for all other particlesto form a swarm PSO was first introduced by Kennedy et alwith an intention of simulating the social behaviour in a flockof birds or a school of fish Shi and Eberhart [6] developedan optimization technique for fuzzy systems by dynamicallyadjusting the inertia weight improving PSOrsquos performancePang et al [7] utilized fuzzy discrete PSO to solve theTravelling salesman problem Abdelbar et al [8] comparedthe behaviour of the Gaussian and Cauchy membershipfunctions in fuzzy PSO and concluded that the Cauchymembership functions are best suited for fuzzy PSO Itwas noted that traditional PSO converges prematurely whenapplied as a global optimization technique To prevent thisdownfall Anantathanavit and Munlin [9] proposed radius(R-PSO) as an extension of standard PSO R-PSO regroupsthe particles into a circle of the given radius and determinesthe best agent particle of the group The experiment resultsproved that R-PSO performed better than traditional PSOwhen solving multimodal complex problems
To produce wholesome proofs for identities based onfuzzy trigonometric functions we introduce the Gaussianqualitative trigonometric functions (GQTFs) on a fuzzycircle The unit fuzzy circle is defined using Gaussianmembership function (GMF) partitions Using the GMFcircumference fuzzy centre and fuzzy point on the circletrigonometric functions and their identities are successfullydeveloped In this paper we use the advantages of R-PSO andGMFs to define a fuzzy R-PSO based on a fuzzy qualitativecircle Section 2 gives the preliminaries and introduces theconcept of GQTFs on the fuzzy circle Section 3 providesinsight on the formation of the fuzzy centre and fuzzypoint on the circle and provides a broad perspective ofthe redefined trigonometric functions their ratio identitiestheir Pythagorean identities their Taylorrsquos series expansionstheir differentials and laws for obtaining the solutions oftriangles Section 4 describes the properties of intersectingfuzzy circles and Section 5 describes the PSO with fuzzymatrices Section 6 describes fuzzy R-PSO with GMF whichmakes an efficient model for finding the best agent FinallySection 7 concludes the paper
00 1 2 3 4 5 6 7 8 9 10
01
02
03
04
05
06
07
08
09
1
Figure 1 GMF with 119888 = 5 and 120590 = 2
2 Prerequisites
The prerequisites required for the developed concept havebeen taken from various research articles which are cited inthe references Slightlymodified versions of the concepts havebeen given in this section
21 Fuzzy Subset Considering a set 119864 which is either finiteor infinite for every element 119909 in 119864 the set consisting of allordered pairs of the form (119909 120583119860(119909)) is called a fuzzy subsetdenoted by 119860 in 119864 Here 120583119860(119909) is called the membershipfunction The membership function gives a mapping of theelements in set 119864 to the membership set119872
22 Zadehrsquos Extension Principle Considering a fuzzy subsetof a universal set 119864 if 119891 119864 rarr 119885 is a function then theextension principle generates a function 119891 whose member-ship function is defined over the supremum of all 119891minus1(119911) = 0that is
120583119891 (119911) = sup119891minus1(119911)
120583119860 (119909) 119909 isin 119864 (2)
Here 119891minus1 is the preimage of 119911 in 11986423 Gaussian Membership Function (GMF) The GMF isgiven by
119866119898119891 (119909 119888 120590) = exp[minus(119888 minus 119909)221205902 ] (3)
where 119888 and 120590 are the centre and width of the fuzzy setrespectively An example of this function is shown in Figure 1This membership function is also defined in terms of theinterval [119898 119895] as follows
119866119898119891 (119909 119898 119895) = exp[minus(119895 minus 119909)221198982 ] (4)
Advances in Fuzzy Systems 3
Table 1 Arithmetic operations
Slno Operation Notation Result1 Sum [119898 119888] + [119895 119886] [119898 + 119895 119888 + 119886]2 Difference [119898 119888] minus [119895 119886] [119898 minus 119886 119888 minus 119895]3 Product [119898 119888] times [119895 119886] [119898 times 119895 119888 times 119886]4 Quotient [119898 119888] divide [119895 119886] [119898 divide 119886 119888 divide 119895]
The GMF with fuzzification factorm is given by
119866119898119891 (119909 119888 120590119898) = exp [minus(119888 minus 119909)1198982120590119898 ] (5)
24 Arithmetic Operations on GMFs TheArithmetic Opera-tions on GMFs can be summarised as follows
Letting 119866119898119891(119909 119898 119888) and 119866119898119891(119909 119895 119886) be two GMFstheir arithmetic operations are shown in Table 1
3 Proposed Method
FuzzyGaussian qualitative coordinates are proposed to facili-tate the geometrical interpretation of GQTFs To achieve thiswe first define a fuzzy circle obtained using GMFs
31 Gaussian Qualitative Coordinates The 119909- and 119910-axes aredefined for a unit circle For the sake of simplicity and easeof use the abscissa and ordinate are first considered as reallines Figure 2 describes the circumference of the fuzzy unitcircle which is obtained by partitioning the circumferenceinto GMFs The cloud formation as described by Ghosh andChakraborty [10] is now refined to obtain sharp boundariesfor the circle The crisp centre of the circle has a neigh-bourhood which is formed by extending and converging thecore area of every GMF towards the centre of the circleThus the centre of the derived fuzzy circle will have infinitelymany sides depending on the number of partitions We canhenceforth generalise the centre to be an infinitesimal circlewith an infinitesimal radius that is 11989732 Fuzzy Centre and Position of a Point The values of 119886and 119887 obtained on the circumference of the fuzzy circle arenow extended towards the core of the circle Without lossof generality a point on the proposed fuzzy circle can beassumed to be the centre of someGMFTheposition of a pointcan be mapped as shown in Figure 3
33 Trigonometric Functions The graphs of sine cosineand tangent functions under the proposed concept havebeen obtained and verified to be in coherence with thecrisp trigonometric functions Various identities and laws fortriangles are presented as follows
331 Ratio Identities
(i) sin (119866119898119891[minus120575 120575]) = 119866119898119891[119886119910 119887119910]119866119898119891[radic(119886119909 minus 1198860)2 + 1198862119910 radic(119887119909 minus 1198870)2 + 1198872119910]
minus03minus03
minus02
minus02
minus01
minus01
0
0
01
01
02
02
03
03
Figure 2 Fuzzy circle with Gaussian membership function
[a b]
[a0 b0] [ax bx]
[ay by]
x
y
Figure 3 Coordinates of a point on the fuzzy circle
(ii) cos (119866119898119891[minus120575 120575]) = 119866119898119891[1198860 minus 119887119909 1198870 minus 119886119909]119866119898119891[radic(119886119909 minus 1198860)2 + 1198862119910 radic(119887119909 minus 1198870)2 + 1198872119910](iii) tan (119866119898119891[minus120575 120575]) = 119866119898119891[119886119910 119887119910]119866119898119891[1198860minus119887119909 1198870minus119886119909]
332 Pythagorean Identities
(i) sin2 (119866119898119891[minus120575 120575]) + cos2 (119866119898119891[minus120575 120575]) = 119866119898119891[1 minus120575 1 + 120575](ii) sec2 (119866119898119891[minus120575 120575]) minus tan2 (119866119898119891[minus120575 120575]) = 119866119898119891[1 minus120575 1 + 120575](iii) csc2 (119866119898119891[minus120575 120575]) minus cot2 (119866119898119891[minus120575 120575]) = 119866119898119891[1 minus120575 1 + 120575]
4 Advances in Fuzzy Systems
333 Laws for Obtaining Solutions to Triangles
(i) The law of sines gives the relationship between thesines of the angles of a triangle and the lengths of thesides of the triangle
sin (119866119898119891 [120579119910 minus 120575119891 120579119910 + 120575119891])119866119898119891 [119886119910 119887119910]= sin (119866119898119891 [120579119909 minus 120575119891 120579119909 + 120575119891])119866119898119891 [119886119909 119887119909]= sin (119866119898119891 [120579119911 minus 120575119891 120579119911 + 120575119891])119866119898119891 [119886119911 119887119911]
(6)
(ii) The law of cosines relates the sides of a triangle withthe cosine of an angle in the triangle
(1) 119866119898119891[119886119909 minus119887119910 119886119910 minus119887119909]2 = 119866119898119891[119888119909 minus119887119910 119888119910 minus119887119909]2 +119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 minus 2119866119898119891[119888119909 minus 119887119910 119888119910 minus 119887119909] times119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909] times cos (119866119898119891[119862 minus 120575 119862 + 120575])(2) 119866119898119891[119888119909 minus 119887119910 119888119910 minus 119887119909]2 = 119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 +119866119898119891[119886119909minus119887119910 119886119910minus119887119909]2minus2times119866119898119891[119886119909minus119888119910 119886119910minus119888119909]times119866119898119891[119886119909 minus 119887119910 119886119910 minus 119887119909] times cos (119866119898119891[119860 minus 120575 119860+ 120575])(3) 119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 = 119866119898119891[119887119909 minus 119888119910 119887119910 minus 119888119909]2 +119866119898119891[119886119909minus119887119910 119886119910minus119887119909]2minus2times119866119898119891[119887119909minus119888119910 119887119910minus119888119909]times119866119898119891[119886119909 minus 119887119910 119886119910 minus 119887119909] times cos (119866119898119891[119861 minus 120575 119861 + 120575])
(iii) The law of tangents gives the relationship between thesides and tangents of the angles of a triangle
119866119898119891 [119887119909 + 119888119909 minus (119886119910 + 119888119910) 119887119910 + 119888119910 minus (119886119909 + 119888119909)]119866119898119891 [119887119909 + 119886119909 minus 2119888119910 119887119910 + 119886119910 minus 2119888119909]= tan ((12) 119866119898119891 [119860 minus 119861 minus 2120575 119860 minus 119861 + 2120575])tan ((12) 119866119898119891 [119860 + 119861 minus 2120575 119860 + 119861 + 2120575])
(7)
334 Mollweidersquos Identity This identity is a tool for checkingthe solutions of triangles It uses all sides and angles of thetriangle
119866119898119891 [119886119909 + 119887119909 minus 2119888119910 119886119910 + 119887119910 minus 2119888119909]119866119898119891 [119886119909 minus 119887119910 119886119910 minus 119887119909]= cos ((12) 119866119898119891 [119860 minus 119861 minus 2120575 119860 minus 119861 + 2120575])
sin ((12) 119866119898119891 [119862 minus 120575 119862 + 120575]) (8)
34 Taylorrsquos Series Expansions of Trigonometric FunctionsThe Taylorrsquos series expansions of the trigonometric functionsare as follows
(i) cos(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = [1 minus (119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 + 120575119898119891])22 + (119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 +120575119898119891])44 ∓ sdot sdot sdot ]
Thus cos(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[cos(119909119898119891 minus 120575119898119891) minus Δ119898119891 cos(119909119898119891 minus 120575119898119891) + Δ119898119891]where Δ119898119891 = 2suminfin119899=246(((119909119898119891 + 120575119898119891)119899 + (119909119898119891 minus120575119898119891)119899)119899)
(ii) [sin(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = 119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 +120575119898119891] minus (119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 +120575119898119891])33 +(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891])55 ∓ sdot sdot sdot ]Thus [sin(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[sin(119909119898119891minus120575119898119891)minusΔ 1 sin(119909119898119891minus120575119898119891)+Δ 1]] whereΔ 1 = 2suminfin119899=135(((119909119898119891 + 120575119898119891)119899 + (119909119898119891 minus 120575119898119891)119899)119899)
(iii) tan(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = 119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 + 120575119898119891] + (13)119866119898119891[(119909119898119891 minus 120575119898119891)3 (119909119898119891 +120575119898119891)3] + (25)119866119898119891[(119909119898119891 minus 120575119898119891)5 (119909119898119891 + 120575119898119891)5] + sdot sdot sdotThus [tan(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[tan(119909119898119891 minus 120575119898119891) tan(119909119898119891 + 120575119898119891)]]
35 Differentiation of the Gaussian Trigonometric FunctionsThe trigonometric functions thus obtained are also fuzzydifferentiable Supposing that 119865(119909) = 119891(119866119898119891[119888 120590]) is a Gaus-sian fuzzy trigonometric function then the derivatives of thefunction are as follows
First Derivative 1198651015840(119909) = 1198911015840(119866119898119891[119888 120590]) times exp(minus119909221205902) times(minus1199091205902)The second and higher order derivatives are obtained by
using the chain rule for the above functions
4 Intersection of Fuzzy Circles
We now introduce the concept of intersecting fuzzy circlesand study their structure and properties while comparingthem with regular intersecting circles
41 Circles Touching at Exactly One Point
Case 1 Two circles have an equal number of partitionsimplying that the radii of both circles are equal Figure 4shows the fuzzified point of intersection
In Figure 4 we observe that the centres of both Gaussiancurves intersect at a crisp point The fuzzified areas of theintersection are congruent trianglesThe area of each triangleis given by 119865119905119886 = 12 times (2119903) times 120590 = 119903 times 120590 Thus the total fuzzyarea is 2119903120590Case 2 The number of partitions on the intersecting circlesis unequal as shown in Figure 5
We observe that the crisp point of intersection is obtainedwhere the centres of both Gaussian curves meet The pointof intersection is bounded by triangles whose areas are givenby
Area of Δ 1 = 12 times 1205901 times (1199031 + 1205901) =1205901 (1199031 + 1205901)2
Area of Δ 2 = 12 times 1205901 times (1199031 minus 1205901) =1205901 (1199031 minus 1205901)2
Advances in Fuzzy Systems 5
[c2 2]
[c1 1]
Figure 4 Circles of equal radii touching at a single point
[c2 2] [c1 1]
Figure 5 Circles of unequal radii touching at a single point
Area of Δ 3 = 12 times 1205902 times (1199032 + 1205902) =1205902 (1199032 + 1205902)2
Area of Δ 4 = 12 times 1205902 times (1199032 minus 1205902) =1205902 (1199032 minus 1205902)2
(9)
Hence the total area is = 11990311205901 + 11990321205902 The area obtained is incoherence with the traditional way of determining the area ofintersection
The intersection of circles becomes interesting when weconsider circles intersecting at two points In such a case thearea of intersection can be either symmetric or dominate asingle circle with a small portion of the second circle as acommon area
42 Fuzzy Circles Intersecting at Two Points
Case 1 Two circles have an equal number of partitions Fig-ure 6 shows the intersecting fuzzy circles From the followingdiagram we observe that the crisp points of intersectionand the common chord are obtained during the fuzzificationprocess We obtain congruent triangles in the fuzzy areaof intersection The centres of the Gaussian curves meet toproduce the crisp point of intersectionThe two points when
[c2 2] [c1 1]
Figure 6 Intersecting circles of equal radii
[c2 2] [c1 1]
Figure 7 Intersecting circles of unequal radii
joined produce the crisp common chord for the intersectingcircles
The area of the overlapping region is calculated as follows
(i) The area of each sector is (119903minus times 120579)2(ii) The length of the arc of the sector is given by 119903 times 120579(iii) Thus the area of the fuzzified sector is (1199032+ times 120579)2(iv) The area of the smaller sector is (1199032minus times 120579)2 Here 119903+ =119903 + 120590 and 119903minus = 119903 minus 120590(v) Supposing the line 119903+ cuts the smaller radius in the
ratio119898 119899 then119898 = 119903+2Thus the area is (1199032+times1205791)4and the total area is 1199032+2 times (2120579 + 1205791)
Case 2 Two circles have an unequal number of partitionswhich implies that the radii of both circles are different(Figure 7)
The area of the bigger fuzzy sector is (1199032 times 120579)2 + (1199032 times1205791)4 = (11990324)(2120579 + 1205791)Similarly the area of the smaller fuzzy sector is (119903214)(2120575+1205751)
6 Advances in Fuzzy Systems
Thus in both cases we obtain a fuzzy diagram boundedby ten points The area of the overlapping section is obtainedusing the following formulas
Areafuzzy = 1Disradic119862 times 119869 times 119860 times119872
119862 = (minusDis + rad1 + rad2) 119869 = (Dis minus rad1 + rad2) 119860 = (Dis + rad1 minus rad2) 119872 = (Dis + rad1 + rad2)
(10)
where Dis = [1198741 minus 1198742 minus (1205901 + 1205902) 1198741 minus 1198742 + (1205901 + 1205902)] is thedistance between the centres and rad1 = [1199031 minus1205901 1199031 +1205901] andrad2 = [1199032 minus 1205902 1199032 + 1205902] are the Gaussian radii of the fuzzycircles
43 Intersection of Three Fuzzy Circles Three circles canintersect in many ways but we consider two special caseswherein we obtain circular triangles and irregular con-vex quadrilaterals However we must check whether anoverlapping area exists between the considered circles Toverify we check if either of the following conditions aresatisfied
(i) A point of intersection of two circles should be a pointinside the third circle
(ii) One of the circles should be engulfed completelyinside another circle
Case 1 Three fuzzy circles with equal numbers of parti-tions are considered implying that the radii of all threecircles are equal The overlapping area formed by thethree segments and an inner triangle whose sides are thearcs of the three circles is called a circular triangle (Fig-ure 8)
The area of the triangle is calculated using Heronrsquosformula
Area119886119887119888 = radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862) (11)
where 119878 = (12)(119860 + 119861 + 119862) 119860 = 119866119898119891[119886119909 119886119910] 119861 =119866119898119891[119887119909 119887119910] and 119862 = 119866119898119891[119888119909 119888119910]The area of the combinedoverlap is given by
Areaseg = 3sum119899=1
1198772119899sinminus1 ( 1198602119877119899) minus3sum119899=1
1198604 radic4 times 1198772119899 minus 1198602+ radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862)
(12)
Case 2 Three fuzzy circles with unequal numbers of parti-tions will have different radii In this case wemust recalculatethe overlapping segment area using the area of the biggercircle (Figure 9)
[c2 2]
[c3 3]
[c1 1]
Figure 8 Circles of equal radii intersecting and forming a circulartriangle
Step 1 We find the midpoint of the chord in the segmentwhich is given by
119909mid = 11990911989412 + 119909119894132 119910mid = 11991011989412 + 119910119894132 (13)
Step 2 We then find the equation of the line joining themidpoint and the centre of the circle which is given by
119910 = 1198611 minus 119910mid1198601 minus 119909midtimes 119909 minus 119909mid (1198611 minus 119910mid)1198601 minus 119909mid
+ 119910mid (14)
Step 3 Next we determine the points of intersection of theabove line and circle which are given by 11988311989411988811198941198882 = (1198861 + 1198871 times119898 minus 119898 times 119899 plusmn radic120575)(1 + 1198982) 11988411989411988811198941198882 = (119899 + 1198861 times 119898 + 1198871 times1198982 plusmn 119898 times radic120575)(1 + 1198982) where119898 = (1198611 minus 119910mid)(1198601 minus 119910mid)119899 = (minus119909mid times (1198611 minus 119910mid))(1198601 minus 119909mid) + 119910mid
Step 4 Finally we check whether the other two radii of thecircles are greater than the distance between the centre andthe midpoint
Thus the area of the bigger segment completely encom-passed by the bigger circle is (119877212)(1205791 minus sin 1205791)Results
(i) The regions of intersection of three equal fuzzy circleshave been considered Hence the common value ofradii has been denoted by R Here R denotes thecommon radii
(ii) Given three intersecting fuzzy circles the lines joiningthe points of intersection outside the circular trianglesatisfy 119860119862119864 = 119861119863119865 which defines Harukirsquos theorem
Advances in Fuzzy Systems 7
(Xic1 Yic1)(xi13 yi13)
(xGC> yGC>)(Xic2 Yic2)
(xi12 yi12)
Figure 9 Three intersecting circles of unequal radii
P
Q
Figure 10 Formation of irregular convex quadrilateral
(iii) The crisp circle which touches the inner circles ofthe circular triangle and its neighbouring triangles iseither tangent to the innermost circle and internallytangent to the inner circles of the neighbouringtriangles or vice versa Such a circle is called theldquoHartrsquos circlerdquo We can construct 8 such Hart circlesfor a given circular triangle
Case 3 The most complex case is that of an overlappingarea which is obtained when the circular segments form theboundary shown in Figure 10 In the process we obtain anirregular convex quadrilateral
The area of the irregular convex quadrilateral is given byAreaquad = (12)119875 times 119876 times sin120601 where 120601 is the angle betweenthe diagonals 119875 and 119876
Hence the combined area of the segments is given by
Area = sum119899=1
41198772119899sinminus1 ( 1198601198992 times 119877119899)
minus 4sum119899=1
1198601198994 radic4 times 1198772119899 minus 1198602119899(15)
Here 119860119899 is the length of the chord joining the points ofintersection of the circles There are four chords which formthe edges of the convex quadrilateral And 119877119899 is the radii ofthe circles
5 Fuzzy Particle Swarm Optimization (PSO)with Fuzzy Matrices and GMFs
51 FuzzyMatrices Amatrix of the form119875 = [119901119894119895120583]119898times119899 where119901119894119895120583 is the membership degree of the element 119901119894119895 isin is calleda fuzzy matrix
In PSO a finite number of particles define a swarmThe particles move in the 119899-dimensional space with certainvelocityThe particlersquos velocity and position are updated usingthe following formula
119881119896+1119894 = 119908 otimes 119881119896119894 oplus (1198881 otimes 119903 (sdot)) otimes (119875119896119894 ⊖ 119883119896119894 ) oplus sumℎisin120578(119894119896)
1198882otimes 119903 (sdot) otimes 120595 (119901ℎ) (119875119896119892 ⊖ 119883119896119894 )
(16)
where 120578(119894 119896) denotes the 119896 best particles in the neigh-bourhood of the particle and 120595(119901ℎ) denotes the matrixcontaining the corresponding membership degrees of theparticles defined using the GMF
8 Advances in Fuzzy Systems
52 Particle Position Initialization The positions of the par-ticles are initialized and represented in the form of a fuzzymatrix The position matrix is given by
119875119903119894119895 = [[[[[
11990111990311 11990111990312 sdot sdot sdot 1199011199031119899 d
1199011199031198991 1199011199031198992 sdot sdot sdot 119901119903119899119899]]]]] (17)
The positions of the particles for the fuzzy matrix aregenerated randomly and satisfy the following conditions
119899sum119895=1
119901119903119894119895 = 1 119875119903119894119895 isin [0 1] 119894 = 1 2 119899 (18)
53 Particle Velocity Initialization The velocity matrix isgiven by
119881119903119894119895 = [[[[[
V11990311 V11990312 sdot sdot sdot V1199031119899 d
V1199031198991 V1199031198992 sdot sdot sdot V119903119899119899
]]]]] (19)
where the velocities of the particles are generated accordingto the randomly generated position of the particles withconditions
119899sum119895=1
V119903119894119895 = 0 119894 = 1 2 119899 (20)
54 Normalization of the Particle Position Matrix The par-ticle position matrix generated using random positions maysometimes not adhere to the constraint 119875119903119894119895 isin [0 1] Hencewe need to normalize the particle position matrix The firststep in normalization involves replacing all negative values inthe matrix with zeros Then the matrix is transformed into
119875119903119894119895 =[[[[[[[
11990111990311sum119899119894=1 119901119903111989411990111990312sum119899119894=1 1199011199031119894 sdot sdot sdot
1199011199031119899sum119899119894=1 1199011199031119894 d1199011199031198991sum119899119894=1 119901119903119899119894
1199011199031198992sum119899119894=1 119901119903119899119894 sdot sdot sdot119901119903119899119899sum119899119894=1 119901119903119899119894
]]]]]]] (21)
55 Choosing the Best Agentswith120572-levels Theagent particlesare now selected based on the value of 120572 where 120572 is a realnumber in the interval [0 1] Once the agent particles areselected they are placed on the circumference of the circle ofradius 120572 Furthermore the global best position of the particleis calculated using the distance formula
119889 (119901119903119894119895 119901119903119908119895)= 18 (120590)2
119899sum119894=1
[(120583119901119903119894119895 (119909119894) minus 120583119901119903119908119895 (119909119894))2 + (1198881 minus 1198882)2] 119889 le 2120572
(22)
This process is illustrated in Figure 11
minus03minus03
minus02
minus02
minus01
minus01
0
0
01
01
02
02
03
03
Pr11
Pr12
Pr13
Figure 11 Neighbourhood for obtaining the global best agent
6 Algorithm for Fuzzy R-PSO with GMFs
The proposed algorithm provides the local best position ofparticles based on the threshold as given in Figure 12
(1) Start(2) Initialize maximum number of particles in the target
neighbourhood max119901 maximum number of itera-tions max119899
(3) Assign random position and velocity matrices for theparticles
(4) For 119894 = 0 to max119901
(a) Calculate positions and velocities of the parti-cles as given in the equation
(b) Normalize the particle positionmatrix using theequation
(5) Fix the 120572-level for the normalized particle positionmatrix
(6) If a particlersquos position in the normalized matrix is le120572then update the first neighbourhood circle
(7) Calculate the distance between the particles andlocate the global best position
(8) Stop
7 Discussion and Conclusion
The proposed methodology of constructing a fuzzy qual-itative circle with GMF provides a smoother graphs offuzzy trigonometric functions when compared to previouslydescribed methods The graphs of the curves as obtained byKaufmann and Gupta [11] flatten either the min- or max-curve depending upon the point of inflection which led toa restriction on the extent of the spread in terms of angular
Advances in Fuzzy Systems 9
minus500 minus400 minus300 minus200 minus100 0 100 200 300 400 500minus400
minus300
minus200
minus100
0
100
200
300
4004 cell
distancevelocity
Figure 12 Neighbourhood obtained using 120572-cuts
measurements This angular spread has now been definedin terms of 120590 which is the width of the GMF When 120590 =0 the Gaussian Fuzzy Circle reduces to the conventionalcrisp circle The centre of the fuzzy circle is also fuzzyand the radius is a linear combination of fuzzy numbersAlso we have demonstrated geometrical interpretation of theGQTFs and the representation of a fuzzy circle with 119899 =25GMFsThe position of a point on the fuzzy circle has beenexplained Trigonometrical identities Pythagorean identitiesand laws for obtaining solutions to triangles (ie law ofsines law of cosines and law of tangents) have been derivedThe GMFs on a fuzzy circle and Taylorrsquos series expansionshave been verified The relationship between qualitative andquantitative trigonometric states is very difficult to describehowever Gaussian fuzzy qualitative trigonometry helps indescribing their relationship In this paper we have success-fully described the intersection of fuzzy circleswhen the circleis divided into either equal or unequal numbers of partitionsand a study of circular triangles has been given The resultson circular triangles have also been verified This researcharticle gives a theoretical interpretation of applying R-PSOinside a fuzzy circle The R-PSO with fuzzy circle of radius 120572(developed using120572-cuts) reduced the premature convergenceof the standard PSO algorithm By fixing various levels of120572 global best position of the particles can be obtainedFurthermore the development of fuzzy circles with partitionsprovides a sharper boundary when compared to the existingideas of fuzzy circles and fuzzy qualitative circles
71 Future Direction The authors intend to implement thisidea in designing a navigation stick using the concept of radarWe propose to utilize this concept in designing navigationsystems for people with special needs Further this researchbeing an extension to fuzzy qualitative trigonometry will beimplemented in extensive research towards robot kinematicsand human movement analysis
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank Editage (httpswwweditagecom) for English language editing andMr MohamedE for his timely help in developing the R-PSO for fuzzy circlealgorithm using Matlab
References
[1] L A Zadeh ldquoFuzzy setsrdquo Information and Computation vol 8pp 338ndash353 1965
[2] J J Buckley and E Eslami An Introduction to Fuzzy Logicand Fuzzy Sets Physica-Verlag Heidelberg NewYork NY USA2002
[3] D A Ress Development of Fuzzy Trigonometric Functionsto support design and manufacturing [PhD Thesis] NorthCarolina University North Carolina NC USA 1999
[4] H Liu G M Coghill and D P Barnes ldquoFuzzy qualitativetrigonometryrdquo International Journal of Approximate Reasoningvol 51 pp 371ndash388 2009
[5] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIrdquo Fuzzy Sets and Systems vol 209 pp 66ndash83 2012
[6] Y Shi and R Eberhart ldquoFuzzy Adaptive Particle SwarmOptimizationrdquo in Proceedings of the Congress on EvolutionaryComputation pp 101ndash106 2001
[7] W Pang K Wang C Zhou and L Dong ldquoFuzzy discreteparticle swarm optimization for solving traveling salesmanproblemrdquo in Proceedings of the 4th International Conference onComputer and Information Technology (CIT rsquo04) pp 796ndash8002004
[8] A M Abdelbar S Abdelshahid and D C Wunsch ldquoGaussianversus Cauchy membership functions in fuzzy PSOrdquo in Pro-ceedings of the 2007 International Joint Conference on NeuralNetworks IJCNN rsquo07 August 2007
[9] M Anantathanavit and M-A Munlin ldquoRadius particle swarmoptimizationrdquo in Proceedings of the 17th International ComputerScience and Engineering Conference ICSEC rsquo13 pp 126ndash130September 2013
[10] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIIIrdquo Fuzzy Sets and Systems vol 283 pp 83ndash107 2016
[11] A Kaufmann and M M Gupta Introduction to Fuzzy Arith-metic Theory and Applications Van Nostrand Reinhold NewYork NY USA 1985
Computer Games Technology
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
Advances in
FuzzySystems
Hindawiwwwhindawicom
Volume 2018
International Journal of
ReconfigurableComputing
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
thinspArtificial Intelligence
Hindawiwwwhindawicom Volumethinsp2018
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawiwwwhindawicom Volume 2018
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Computational Intelligence and Neuroscience
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018
Human-ComputerInteraction
Advances in
Hindawiwwwhindawicom Volume 2018
Scientic Programming
Submit your manuscripts atwwwhindawicom

Advances in Fuzzy Systems 3
Table 1 Arithmetic operations
Slno Operation Notation Result1 Sum [119898 119888] + [119895 119886] [119898 + 119895 119888 + 119886]2 Difference [119898 119888] minus [119895 119886] [119898 minus 119886 119888 minus 119895]3 Product [119898 119888] times [119895 119886] [119898 times 119895 119888 times 119886]4 Quotient [119898 119888] divide [119895 119886] [119898 divide 119886 119888 divide 119895]
The GMF with fuzzification factorm is given by
119866119898119891 (119909 119888 120590119898) = exp [minus(119888 minus 119909)1198982120590119898 ] (5)
24 Arithmetic Operations on GMFs TheArithmetic Opera-tions on GMFs can be summarised as follows
Letting 119866119898119891(119909 119898 119888) and 119866119898119891(119909 119895 119886) be two GMFstheir arithmetic operations are shown in Table 1
3 Proposed Method
FuzzyGaussian qualitative coordinates are proposed to facili-tate the geometrical interpretation of GQTFs To achieve thiswe first define a fuzzy circle obtained using GMFs
31 Gaussian Qualitative Coordinates The 119909- and 119910-axes aredefined for a unit circle For the sake of simplicity and easeof use the abscissa and ordinate are first considered as reallines Figure 2 describes the circumference of the fuzzy unitcircle which is obtained by partitioning the circumferenceinto GMFs The cloud formation as described by Ghosh andChakraborty [10] is now refined to obtain sharp boundariesfor the circle The crisp centre of the circle has a neigh-bourhood which is formed by extending and converging thecore area of every GMF towards the centre of the circleThus the centre of the derived fuzzy circle will have infinitelymany sides depending on the number of partitions We canhenceforth generalise the centre to be an infinitesimal circlewith an infinitesimal radius that is 11989732 Fuzzy Centre and Position of a Point The values of 119886and 119887 obtained on the circumference of the fuzzy circle arenow extended towards the core of the circle Without lossof generality a point on the proposed fuzzy circle can beassumed to be the centre of someGMFTheposition of a pointcan be mapped as shown in Figure 3
33 Trigonometric Functions The graphs of sine cosineand tangent functions under the proposed concept havebeen obtained and verified to be in coherence with thecrisp trigonometric functions Various identities and laws fortriangles are presented as follows
331 Ratio Identities
(i) sin (119866119898119891[minus120575 120575]) = 119866119898119891[119886119910 119887119910]119866119898119891[radic(119886119909 minus 1198860)2 + 1198862119910 radic(119887119909 minus 1198870)2 + 1198872119910]
minus03minus03
minus02
minus02
minus01
minus01
0
0
01
01
02
02
03
03
Figure 2 Fuzzy circle with Gaussian membership function
[a b]
[a0 b0] [ax bx]
[ay by]
x
y
Figure 3 Coordinates of a point on the fuzzy circle
(ii) cos (119866119898119891[minus120575 120575]) = 119866119898119891[1198860 minus 119887119909 1198870 minus 119886119909]119866119898119891[radic(119886119909 minus 1198860)2 + 1198862119910 radic(119887119909 minus 1198870)2 + 1198872119910](iii) tan (119866119898119891[minus120575 120575]) = 119866119898119891[119886119910 119887119910]119866119898119891[1198860minus119887119909 1198870minus119886119909]
332 Pythagorean Identities
(i) sin2 (119866119898119891[minus120575 120575]) + cos2 (119866119898119891[minus120575 120575]) = 119866119898119891[1 minus120575 1 + 120575](ii) sec2 (119866119898119891[minus120575 120575]) minus tan2 (119866119898119891[minus120575 120575]) = 119866119898119891[1 minus120575 1 + 120575](iii) csc2 (119866119898119891[minus120575 120575]) minus cot2 (119866119898119891[minus120575 120575]) = 119866119898119891[1 minus120575 1 + 120575]
4 Advances in Fuzzy Systems
333 Laws for Obtaining Solutions to Triangles
(i) The law of sines gives the relationship between thesines of the angles of a triangle and the lengths of thesides of the triangle
sin (119866119898119891 [120579119910 minus 120575119891 120579119910 + 120575119891])119866119898119891 [119886119910 119887119910]= sin (119866119898119891 [120579119909 minus 120575119891 120579119909 + 120575119891])119866119898119891 [119886119909 119887119909]= sin (119866119898119891 [120579119911 minus 120575119891 120579119911 + 120575119891])119866119898119891 [119886119911 119887119911]
(6)
(ii) The law of cosines relates the sides of a triangle withthe cosine of an angle in the triangle
(1) 119866119898119891[119886119909 minus119887119910 119886119910 minus119887119909]2 = 119866119898119891[119888119909 minus119887119910 119888119910 minus119887119909]2 +119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 minus 2119866119898119891[119888119909 minus 119887119910 119888119910 minus 119887119909] times119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909] times cos (119866119898119891[119862 minus 120575 119862 + 120575])(2) 119866119898119891[119888119909 minus 119887119910 119888119910 minus 119887119909]2 = 119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 +119866119898119891[119886119909minus119887119910 119886119910minus119887119909]2minus2times119866119898119891[119886119909minus119888119910 119886119910minus119888119909]times119866119898119891[119886119909 minus 119887119910 119886119910 minus 119887119909] times cos (119866119898119891[119860 minus 120575 119860+ 120575])(3) 119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 = 119866119898119891[119887119909 minus 119888119910 119887119910 minus 119888119909]2 +119866119898119891[119886119909minus119887119910 119886119910minus119887119909]2minus2times119866119898119891[119887119909minus119888119910 119887119910minus119888119909]times119866119898119891[119886119909 minus 119887119910 119886119910 minus 119887119909] times cos (119866119898119891[119861 minus 120575 119861 + 120575])
(iii) The law of tangents gives the relationship between thesides and tangents of the angles of a triangle
119866119898119891 [119887119909 + 119888119909 minus (119886119910 + 119888119910) 119887119910 + 119888119910 minus (119886119909 + 119888119909)]119866119898119891 [119887119909 + 119886119909 minus 2119888119910 119887119910 + 119886119910 minus 2119888119909]= tan ((12) 119866119898119891 [119860 minus 119861 minus 2120575 119860 minus 119861 + 2120575])tan ((12) 119866119898119891 [119860 + 119861 minus 2120575 119860 + 119861 + 2120575])
(7)
334 Mollweidersquos Identity This identity is a tool for checkingthe solutions of triangles It uses all sides and angles of thetriangle
119866119898119891 [119886119909 + 119887119909 minus 2119888119910 119886119910 + 119887119910 minus 2119888119909]119866119898119891 [119886119909 minus 119887119910 119886119910 minus 119887119909]= cos ((12) 119866119898119891 [119860 minus 119861 minus 2120575 119860 minus 119861 + 2120575])
sin ((12) 119866119898119891 [119862 minus 120575 119862 + 120575]) (8)
34 Taylorrsquos Series Expansions of Trigonometric FunctionsThe Taylorrsquos series expansions of the trigonometric functionsare as follows
(i) cos(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = [1 minus (119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 + 120575119898119891])22 + (119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 +120575119898119891])44 ∓ sdot sdot sdot ]
Thus cos(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[cos(119909119898119891 minus 120575119898119891) minus Δ119898119891 cos(119909119898119891 minus 120575119898119891) + Δ119898119891]where Δ119898119891 = 2suminfin119899=246(((119909119898119891 + 120575119898119891)119899 + (119909119898119891 minus120575119898119891)119899)119899)
(ii) [sin(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = 119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 +120575119898119891] minus (119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 +120575119898119891])33 +(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891])55 ∓ sdot sdot sdot ]Thus [sin(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[sin(119909119898119891minus120575119898119891)minusΔ 1 sin(119909119898119891minus120575119898119891)+Δ 1]] whereΔ 1 = 2suminfin119899=135(((119909119898119891 + 120575119898119891)119899 + (119909119898119891 minus 120575119898119891)119899)119899)
(iii) tan(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = 119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 + 120575119898119891] + (13)119866119898119891[(119909119898119891 minus 120575119898119891)3 (119909119898119891 +120575119898119891)3] + (25)119866119898119891[(119909119898119891 minus 120575119898119891)5 (119909119898119891 + 120575119898119891)5] + sdot sdot sdotThus [tan(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[tan(119909119898119891 minus 120575119898119891) tan(119909119898119891 + 120575119898119891)]]
35 Differentiation of the Gaussian Trigonometric FunctionsThe trigonometric functions thus obtained are also fuzzydifferentiable Supposing that 119865(119909) = 119891(119866119898119891[119888 120590]) is a Gaus-sian fuzzy trigonometric function then the derivatives of thefunction are as follows
First Derivative 1198651015840(119909) = 1198911015840(119866119898119891[119888 120590]) times exp(minus119909221205902) times(minus1199091205902)The second and higher order derivatives are obtained by
using the chain rule for the above functions
4 Intersection of Fuzzy Circles
We now introduce the concept of intersecting fuzzy circlesand study their structure and properties while comparingthem with regular intersecting circles
41 Circles Touching at Exactly One Point
Case 1 Two circles have an equal number of partitionsimplying that the radii of both circles are equal Figure 4shows the fuzzified point of intersection
In Figure 4 we observe that the centres of both Gaussiancurves intersect at a crisp point The fuzzified areas of theintersection are congruent trianglesThe area of each triangleis given by 119865119905119886 = 12 times (2119903) times 120590 = 119903 times 120590 Thus the total fuzzyarea is 2119903120590Case 2 The number of partitions on the intersecting circlesis unequal as shown in Figure 5
We observe that the crisp point of intersection is obtainedwhere the centres of both Gaussian curves meet The pointof intersection is bounded by triangles whose areas are givenby
Area of Δ 1 = 12 times 1205901 times (1199031 + 1205901) =1205901 (1199031 + 1205901)2
Area of Δ 2 = 12 times 1205901 times (1199031 minus 1205901) =1205901 (1199031 minus 1205901)2
Advances in Fuzzy Systems 5
[c2 2]
[c1 1]
Figure 4 Circles of equal radii touching at a single point
[c2 2] [c1 1]
Figure 5 Circles of unequal radii touching at a single point
Area of Δ 3 = 12 times 1205902 times (1199032 + 1205902) =1205902 (1199032 + 1205902)2
Area of Δ 4 = 12 times 1205902 times (1199032 minus 1205902) =1205902 (1199032 minus 1205902)2
(9)
Hence the total area is = 11990311205901 + 11990321205902 The area obtained is incoherence with the traditional way of determining the area ofintersection
The intersection of circles becomes interesting when weconsider circles intersecting at two points In such a case thearea of intersection can be either symmetric or dominate asingle circle with a small portion of the second circle as acommon area
42 Fuzzy Circles Intersecting at Two Points
Case 1 Two circles have an equal number of partitions Fig-ure 6 shows the intersecting fuzzy circles From the followingdiagram we observe that the crisp points of intersectionand the common chord are obtained during the fuzzificationprocess We obtain congruent triangles in the fuzzy areaof intersection The centres of the Gaussian curves meet toproduce the crisp point of intersectionThe two points when
[c2 2] [c1 1]
Figure 6 Intersecting circles of equal radii
[c2 2] [c1 1]
Figure 7 Intersecting circles of unequal radii
joined produce the crisp common chord for the intersectingcircles
The area of the overlapping region is calculated as follows
(i) The area of each sector is (119903minus times 120579)2(ii) The length of the arc of the sector is given by 119903 times 120579(iii) Thus the area of the fuzzified sector is (1199032+ times 120579)2(iv) The area of the smaller sector is (1199032minus times 120579)2 Here 119903+ =119903 + 120590 and 119903minus = 119903 minus 120590(v) Supposing the line 119903+ cuts the smaller radius in the
ratio119898 119899 then119898 = 119903+2Thus the area is (1199032+times1205791)4and the total area is 1199032+2 times (2120579 + 1205791)
Case 2 Two circles have an unequal number of partitionswhich implies that the radii of both circles are different(Figure 7)
The area of the bigger fuzzy sector is (1199032 times 120579)2 + (1199032 times1205791)4 = (11990324)(2120579 + 1205791)Similarly the area of the smaller fuzzy sector is (119903214)(2120575+1205751)
6 Advances in Fuzzy Systems
Thus in both cases we obtain a fuzzy diagram boundedby ten points The area of the overlapping section is obtainedusing the following formulas
Areafuzzy = 1Disradic119862 times 119869 times 119860 times119872
119862 = (minusDis + rad1 + rad2) 119869 = (Dis minus rad1 + rad2) 119860 = (Dis + rad1 minus rad2) 119872 = (Dis + rad1 + rad2)
(10)
where Dis = [1198741 minus 1198742 minus (1205901 + 1205902) 1198741 minus 1198742 + (1205901 + 1205902)] is thedistance between the centres and rad1 = [1199031 minus1205901 1199031 +1205901] andrad2 = [1199032 minus 1205902 1199032 + 1205902] are the Gaussian radii of the fuzzycircles
43 Intersection of Three Fuzzy Circles Three circles canintersect in many ways but we consider two special caseswherein we obtain circular triangles and irregular con-vex quadrilaterals However we must check whether anoverlapping area exists between the considered circles Toverify we check if either of the following conditions aresatisfied
(i) A point of intersection of two circles should be a pointinside the third circle
(ii) One of the circles should be engulfed completelyinside another circle
Case 1 Three fuzzy circles with equal numbers of parti-tions are considered implying that the radii of all threecircles are equal The overlapping area formed by thethree segments and an inner triangle whose sides are thearcs of the three circles is called a circular triangle (Fig-ure 8)
The area of the triangle is calculated using Heronrsquosformula
Area119886119887119888 = radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862) (11)
where 119878 = (12)(119860 + 119861 + 119862) 119860 = 119866119898119891[119886119909 119886119910] 119861 =119866119898119891[119887119909 119887119910] and 119862 = 119866119898119891[119888119909 119888119910]The area of the combinedoverlap is given by
Areaseg = 3sum119899=1
1198772119899sinminus1 ( 1198602119877119899) minus3sum119899=1
1198604 radic4 times 1198772119899 minus 1198602+ radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862)
(12)
Case 2 Three fuzzy circles with unequal numbers of parti-tions will have different radii In this case wemust recalculatethe overlapping segment area using the area of the biggercircle (Figure 9)
[c2 2]
[c3 3]
[c1 1]
Figure 8 Circles of equal radii intersecting and forming a circulartriangle
Step 1 We find the midpoint of the chord in the segmentwhich is given by
119909mid = 11990911989412 + 119909119894132 119910mid = 11991011989412 + 119910119894132 (13)
Step 2 We then find the equation of the line joining themidpoint and the centre of the circle which is given by
119910 = 1198611 minus 119910mid1198601 minus 119909midtimes 119909 minus 119909mid (1198611 minus 119910mid)1198601 minus 119909mid
+ 119910mid (14)
Step 3 Next we determine the points of intersection of theabove line and circle which are given by 11988311989411988811198941198882 = (1198861 + 1198871 times119898 minus 119898 times 119899 plusmn radic120575)(1 + 1198982) 11988411989411988811198941198882 = (119899 + 1198861 times 119898 + 1198871 times1198982 plusmn 119898 times radic120575)(1 + 1198982) where119898 = (1198611 minus 119910mid)(1198601 minus 119910mid)119899 = (minus119909mid times (1198611 minus 119910mid))(1198601 minus 119909mid) + 119910mid
Step 4 Finally we check whether the other two radii of thecircles are greater than the distance between the centre andthe midpoint
Thus the area of the bigger segment completely encom-passed by the bigger circle is (119877212)(1205791 minus sin 1205791)Results
(i) The regions of intersection of three equal fuzzy circleshave been considered Hence the common value ofradii has been denoted by R Here R denotes thecommon radii
(ii) Given three intersecting fuzzy circles the lines joiningthe points of intersection outside the circular trianglesatisfy 119860119862119864 = 119861119863119865 which defines Harukirsquos theorem
Advances in Fuzzy Systems 7
(Xic1 Yic1)(xi13 yi13)
(xGC> yGC>)(Xic2 Yic2)
(xi12 yi12)
Figure 9 Three intersecting circles of unequal radii
P
Q
Figure 10 Formation of irregular convex quadrilateral
(iii) The crisp circle which touches the inner circles ofthe circular triangle and its neighbouring triangles iseither tangent to the innermost circle and internallytangent to the inner circles of the neighbouringtriangles or vice versa Such a circle is called theldquoHartrsquos circlerdquo We can construct 8 such Hart circlesfor a given circular triangle
Case 3 The most complex case is that of an overlappingarea which is obtained when the circular segments form theboundary shown in Figure 10 In the process we obtain anirregular convex quadrilateral
The area of the irregular convex quadrilateral is given byAreaquad = (12)119875 times 119876 times sin120601 where 120601 is the angle betweenthe diagonals 119875 and 119876
Hence the combined area of the segments is given by
Area = sum119899=1
41198772119899sinminus1 ( 1198601198992 times 119877119899)
minus 4sum119899=1
1198601198994 radic4 times 1198772119899 minus 1198602119899(15)
Here 119860119899 is the length of the chord joining the points ofintersection of the circles There are four chords which formthe edges of the convex quadrilateral And 119877119899 is the radii ofthe circles
5 Fuzzy Particle Swarm Optimization (PSO)with Fuzzy Matrices and GMFs
51 FuzzyMatrices Amatrix of the form119875 = [119901119894119895120583]119898times119899 where119901119894119895120583 is the membership degree of the element 119901119894119895 isin is calleda fuzzy matrix
In PSO a finite number of particles define a swarmThe particles move in the 119899-dimensional space with certainvelocityThe particlersquos velocity and position are updated usingthe following formula
119881119896+1119894 = 119908 otimes 119881119896119894 oplus (1198881 otimes 119903 (sdot)) otimes (119875119896119894 ⊖ 119883119896119894 ) oplus sumℎisin120578(119894119896)
1198882otimes 119903 (sdot) otimes 120595 (119901ℎ) (119875119896119892 ⊖ 119883119896119894 )
(16)
where 120578(119894 119896) denotes the 119896 best particles in the neigh-bourhood of the particle and 120595(119901ℎ) denotes the matrixcontaining the corresponding membership degrees of theparticles defined using the GMF
8 Advances in Fuzzy Systems
52 Particle Position Initialization The positions of the par-ticles are initialized and represented in the form of a fuzzymatrix The position matrix is given by
119875119903119894119895 = [[[[[
11990111990311 11990111990312 sdot sdot sdot 1199011199031119899 d
1199011199031198991 1199011199031198992 sdot sdot sdot 119901119903119899119899]]]]] (17)
The positions of the particles for the fuzzy matrix aregenerated randomly and satisfy the following conditions
119899sum119895=1
119901119903119894119895 = 1 119875119903119894119895 isin [0 1] 119894 = 1 2 119899 (18)
53 Particle Velocity Initialization The velocity matrix isgiven by
119881119903119894119895 = [[[[[
V11990311 V11990312 sdot sdot sdot V1199031119899 d
V1199031198991 V1199031198992 sdot sdot sdot V119903119899119899
]]]]] (19)
where the velocities of the particles are generated accordingto the randomly generated position of the particles withconditions
119899sum119895=1
V119903119894119895 = 0 119894 = 1 2 119899 (20)
54 Normalization of the Particle Position Matrix The par-ticle position matrix generated using random positions maysometimes not adhere to the constraint 119875119903119894119895 isin [0 1] Hencewe need to normalize the particle position matrix The firststep in normalization involves replacing all negative values inthe matrix with zeros Then the matrix is transformed into
119875119903119894119895 =[[[[[[[
11990111990311sum119899119894=1 119901119903111989411990111990312sum119899119894=1 1199011199031119894 sdot sdot sdot
1199011199031119899sum119899119894=1 1199011199031119894 d1199011199031198991sum119899119894=1 119901119903119899119894
1199011199031198992sum119899119894=1 119901119903119899119894 sdot sdot sdot119901119903119899119899sum119899119894=1 119901119903119899119894
]]]]]]] (21)
55 Choosing the Best Agentswith120572-levels Theagent particlesare now selected based on the value of 120572 where 120572 is a realnumber in the interval [0 1] Once the agent particles areselected they are placed on the circumference of the circle ofradius 120572 Furthermore the global best position of the particleis calculated using the distance formula
119889 (119901119903119894119895 119901119903119908119895)= 18 (120590)2
119899sum119894=1
[(120583119901119903119894119895 (119909119894) minus 120583119901119903119908119895 (119909119894))2 + (1198881 minus 1198882)2] 119889 le 2120572
(22)
This process is illustrated in Figure 11
minus03minus03
minus02
minus02
minus01
minus01
0
0
01
01
02
02
03
03
Pr11
Pr12
Pr13
Figure 11 Neighbourhood for obtaining the global best agent
6 Algorithm for Fuzzy R-PSO with GMFs
The proposed algorithm provides the local best position ofparticles based on the threshold as given in Figure 12
(1) Start(2) Initialize maximum number of particles in the target
neighbourhood max119901 maximum number of itera-tions max119899
(3) Assign random position and velocity matrices for theparticles
(4) For 119894 = 0 to max119901
(a) Calculate positions and velocities of the parti-cles as given in the equation
(b) Normalize the particle positionmatrix using theequation
(5) Fix the 120572-level for the normalized particle positionmatrix
(6) If a particlersquos position in the normalized matrix is le120572then update the first neighbourhood circle
(7) Calculate the distance between the particles andlocate the global best position
(8) Stop
7 Discussion and Conclusion
The proposed methodology of constructing a fuzzy qual-itative circle with GMF provides a smoother graphs offuzzy trigonometric functions when compared to previouslydescribed methods The graphs of the curves as obtained byKaufmann and Gupta [11] flatten either the min- or max-curve depending upon the point of inflection which led toa restriction on the extent of the spread in terms of angular
Advances in Fuzzy Systems 9
minus500 minus400 minus300 minus200 minus100 0 100 200 300 400 500minus400
minus300
minus200
minus100
0
100
200
300
4004 cell
distancevelocity
Figure 12 Neighbourhood obtained using 120572-cuts
measurements This angular spread has now been definedin terms of 120590 which is the width of the GMF When 120590 =0 the Gaussian Fuzzy Circle reduces to the conventionalcrisp circle The centre of the fuzzy circle is also fuzzyand the radius is a linear combination of fuzzy numbersAlso we have demonstrated geometrical interpretation of theGQTFs and the representation of a fuzzy circle with 119899 =25GMFsThe position of a point on the fuzzy circle has beenexplained Trigonometrical identities Pythagorean identitiesand laws for obtaining solutions to triangles (ie law ofsines law of cosines and law of tangents) have been derivedThe GMFs on a fuzzy circle and Taylorrsquos series expansionshave been verified The relationship between qualitative andquantitative trigonometric states is very difficult to describehowever Gaussian fuzzy qualitative trigonometry helps indescribing their relationship In this paper we have success-fully described the intersection of fuzzy circleswhen the circleis divided into either equal or unequal numbers of partitionsand a study of circular triangles has been given The resultson circular triangles have also been verified This researcharticle gives a theoretical interpretation of applying R-PSOinside a fuzzy circle The R-PSO with fuzzy circle of radius 120572(developed using120572-cuts) reduced the premature convergenceof the standard PSO algorithm By fixing various levels of120572 global best position of the particles can be obtainedFurthermore the development of fuzzy circles with partitionsprovides a sharper boundary when compared to the existingideas of fuzzy circles and fuzzy qualitative circles
71 Future Direction The authors intend to implement thisidea in designing a navigation stick using the concept of radarWe propose to utilize this concept in designing navigationsystems for people with special needs Further this researchbeing an extension to fuzzy qualitative trigonometry will beimplemented in extensive research towards robot kinematicsand human movement analysis
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank Editage (httpswwweditagecom) for English language editing andMr MohamedE for his timely help in developing the R-PSO for fuzzy circlealgorithm using Matlab
References
[1] L A Zadeh ldquoFuzzy setsrdquo Information and Computation vol 8pp 338ndash353 1965
[2] J J Buckley and E Eslami An Introduction to Fuzzy Logicand Fuzzy Sets Physica-Verlag Heidelberg NewYork NY USA2002
[3] D A Ress Development of Fuzzy Trigonometric Functionsto support design and manufacturing [PhD Thesis] NorthCarolina University North Carolina NC USA 1999
[4] H Liu G M Coghill and D P Barnes ldquoFuzzy qualitativetrigonometryrdquo International Journal of Approximate Reasoningvol 51 pp 371ndash388 2009
[5] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIrdquo Fuzzy Sets and Systems vol 209 pp 66ndash83 2012
[6] Y Shi and R Eberhart ldquoFuzzy Adaptive Particle SwarmOptimizationrdquo in Proceedings of the Congress on EvolutionaryComputation pp 101ndash106 2001
[7] W Pang K Wang C Zhou and L Dong ldquoFuzzy discreteparticle swarm optimization for solving traveling salesmanproblemrdquo in Proceedings of the 4th International Conference onComputer and Information Technology (CIT rsquo04) pp 796ndash8002004
[8] A M Abdelbar S Abdelshahid and D C Wunsch ldquoGaussianversus Cauchy membership functions in fuzzy PSOrdquo in Pro-ceedings of the 2007 International Joint Conference on NeuralNetworks IJCNN rsquo07 August 2007
[9] M Anantathanavit and M-A Munlin ldquoRadius particle swarmoptimizationrdquo in Proceedings of the 17th International ComputerScience and Engineering Conference ICSEC rsquo13 pp 126ndash130September 2013
[10] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIIIrdquo Fuzzy Sets and Systems vol 283 pp 83ndash107 2016
[11] A Kaufmann and M M Gupta Introduction to Fuzzy Arith-metic Theory and Applications Van Nostrand Reinhold NewYork NY USA 1985
Computer Games Technology
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
Advances in
FuzzySystems
Hindawiwwwhindawicom
Volume 2018
International Journal of
ReconfigurableComputing
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
thinspArtificial Intelligence
Hindawiwwwhindawicom Volumethinsp2018
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawiwwwhindawicom Volume 2018
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Computational Intelligence and Neuroscience
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018
Human-ComputerInteraction
Advances in
Hindawiwwwhindawicom Volume 2018
Scientic Programming
Submit your manuscripts atwwwhindawicom

4 Advances in Fuzzy Systems
333 Laws for Obtaining Solutions to Triangles
(i) The law of sines gives the relationship between thesines of the angles of a triangle and the lengths of thesides of the triangle
sin (119866119898119891 [120579119910 minus 120575119891 120579119910 + 120575119891])119866119898119891 [119886119910 119887119910]= sin (119866119898119891 [120579119909 minus 120575119891 120579119909 + 120575119891])119866119898119891 [119886119909 119887119909]= sin (119866119898119891 [120579119911 minus 120575119891 120579119911 + 120575119891])119866119898119891 [119886119911 119887119911]
(6)
(ii) The law of cosines relates the sides of a triangle withthe cosine of an angle in the triangle
(1) 119866119898119891[119886119909 minus119887119910 119886119910 minus119887119909]2 = 119866119898119891[119888119909 minus119887119910 119888119910 minus119887119909]2 +119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 minus 2119866119898119891[119888119909 minus 119887119910 119888119910 minus 119887119909] times119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909] times cos (119866119898119891[119862 minus 120575 119862 + 120575])(2) 119866119898119891[119888119909 minus 119887119910 119888119910 minus 119887119909]2 = 119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 +119866119898119891[119886119909minus119887119910 119886119910minus119887119909]2minus2times119866119898119891[119886119909minus119888119910 119886119910minus119888119909]times119866119898119891[119886119909 minus 119887119910 119886119910 minus 119887119909] times cos (119866119898119891[119860 minus 120575 119860+ 120575])(3) 119866119898119891[119886119909 minus 119888119910 119886119910 minus 119888119909]2 = 119866119898119891[119887119909 minus 119888119910 119887119910 minus 119888119909]2 +119866119898119891[119886119909minus119887119910 119886119910minus119887119909]2minus2times119866119898119891[119887119909minus119888119910 119887119910minus119888119909]times119866119898119891[119886119909 minus 119887119910 119886119910 minus 119887119909] times cos (119866119898119891[119861 minus 120575 119861 + 120575])
(iii) The law of tangents gives the relationship between thesides and tangents of the angles of a triangle
119866119898119891 [119887119909 + 119888119909 minus (119886119910 + 119888119910) 119887119910 + 119888119910 minus (119886119909 + 119888119909)]119866119898119891 [119887119909 + 119886119909 minus 2119888119910 119887119910 + 119886119910 minus 2119888119909]= tan ((12) 119866119898119891 [119860 minus 119861 minus 2120575 119860 minus 119861 + 2120575])tan ((12) 119866119898119891 [119860 + 119861 minus 2120575 119860 + 119861 + 2120575])
(7)
334 Mollweidersquos Identity This identity is a tool for checkingthe solutions of triangles It uses all sides and angles of thetriangle
119866119898119891 [119886119909 + 119887119909 minus 2119888119910 119886119910 + 119887119910 minus 2119888119909]119866119898119891 [119886119909 minus 119887119910 119886119910 minus 119887119909]= cos ((12) 119866119898119891 [119860 minus 119861 minus 2120575 119860 minus 119861 + 2120575])
sin ((12) 119866119898119891 [119862 minus 120575 119862 + 120575]) (8)
34 Taylorrsquos Series Expansions of Trigonometric FunctionsThe Taylorrsquos series expansions of the trigonometric functionsare as follows
(i) cos(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = [1 minus (119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 + 120575119898119891])22 + (119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 +120575119898119891])44 ∓ sdot sdot sdot ]
Thus cos(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[cos(119909119898119891 minus 120575119898119891) minus Δ119898119891 cos(119909119898119891 minus 120575119898119891) + Δ119898119891]where Δ119898119891 = 2suminfin119899=246(((119909119898119891 + 120575119898119891)119899 + (119909119898119891 minus120575119898119891)119899)119899)
(ii) [sin(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = 119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 +120575119898119891] minus (119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 +120575119898119891])33 +(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891])55 ∓ sdot sdot sdot ]Thus [sin(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[sin(119909119898119891minus120575119898119891)minusΔ 1 sin(119909119898119891minus120575119898119891)+Δ 1]] whereΔ 1 = 2suminfin119899=135(((119909119898119891 + 120575119898119891)119899 + (119909119898119891 minus 120575119898119891)119899)119899)
(iii) tan(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) = 119866119898119891[119909119898119891 minus120575119898119891 119909119898119891 + 120575119898119891] + (13)119866119898119891[(119909119898119891 minus 120575119898119891)3 (119909119898119891 +120575119898119891)3] + (25)119866119898119891[(119909119898119891 minus 120575119898119891)5 (119909119898119891 + 120575119898119891)5] + sdot sdot sdotThus [tan(119866119898119891[119909119898119891 minus 120575119898119891 119909119898119891 + 120575119898119891]) =119866119898119891[tan(119909119898119891 minus 120575119898119891) tan(119909119898119891 + 120575119898119891)]]
35 Differentiation of the Gaussian Trigonometric FunctionsThe trigonometric functions thus obtained are also fuzzydifferentiable Supposing that 119865(119909) = 119891(119866119898119891[119888 120590]) is a Gaus-sian fuzzy trigonometric function then the derivatives of thefunction are as follows
First Derivative 1198651015840(119909) = 1198911015840(119866119898119891[119888 120590]) times exp(minus119909221205902) times(minus1199091205902)The second and higher order derivatives are obtained by
using the chain rule for the above functions
4 Intersection of Fuzzy Circles
We now introduce the concept of intersecting fuzzy circlesand study their structure and properties while comparingthem with regular intersecting circles
41 Circles Touching at Exactly One Point
Case 1 Two circles have an equal number of partitionsimplying that the radii of both circles are equal Figure 4shows the fuzzified point of intersection
In Figure 4 we observe that the centres of both Gaussiancurves intersect at a crisp point The fuzzified areas of theintersection are congruent trianglesThe area of each triangleis given by 119865119905119886 = 12 times (2119903) times 120590 = 119903 times 120590 Thus the total fuzzyarea is 2119903120590Case 2 The number of partitions on the intersecting circlesis unequal as shown in Figure 5
We observe that the crisp point of intersection is obtainedwhere the centres of both Gaussian curves meet The pointof intersection is bounded by triangles whose areas are givenby
Area of Δ 1 = 12 times 1205901 times (1199031 + 1205901) =1205901 (1199031 + 1205901)2
Area of Δ 2 = 12 times 1205901 times (1199031 minus 1205901) =1205901 (1199031 minus 1205901)2
Advances in Fuzzy Systems 5
[c2 2]
[c1 1]
Figure 4 Circles of equal radii touching at a single point
[c2 2] [c1 1]
Figure 5 Circles of unequal radii touching at a single point
Area of Δ 3 = 12 times 1205902 times (1199032 + 1205902) =1205902 (1199032 + 1205902)2
Area of Δ 4 = 12 times 1205902 times (1199032 minus 1205902) =1205902 (1199032 minus 1205902)2
(9)
Hence the total area is = 11990311205901 + 11990321205902 The area obtained is incoherence with the traditional way of determining the area ofintersection
The intersection of circles becomes interesting when weconsider circles intersecting at two points In such a case thearea of intersection can be either symmetric or dominate asingle circle with a small portion of the second circle as acommon area
42 Fuzzy Circles Intersecting at Two Points
Case 1 Two circles have an equal number of partitions Fig-ure 6 shows the intersecting fuzzy circles From the followingdiagram we observe that the crisp points of intersectionand the common chord are obtained during the fuzzificationprocess We obtain congruent triangles in the fuzzy areaof intersection The centres of the Gaussian curves meet toproduce the crisp point of intersectionThe two points when
[c2 2] [c1 1]
Figure 6 Intersecting circles of equal radii
[c2 2] [c1 1]
Figure 7 Intersecting circles of unequal radii
joined produce the crisp common chord for the intersectingcircles
The area of the overlapping region is calculated as follows
(i) The area of each sector is (119903minus times 120579)2(ii) The length of the arc of the sector is given by 119903 times 120579(iii) Thus the area of the fuzzified sector is (1199032+ times 120579)2(iv) The area of the smaller sector is (1199032minus times 120579)2 Here 119903+ =119903 + 120590 and 119903minus = 119903 minus 120590(v) Supposing the line 119903+ cuts the smaller radius in the
ratio119898 119899 then119898 = 119903+2Thus the area is (1199032+times1205791)4and the total area is 1199032+2 times (2120579 + 1205791)
Case 2 Two circles have an unequal number of partitionswhich implies that the radii of both circles are different(Figure 7)
The area of the bigger fuzzy sector is (1199032 times 120579)2 + (1199032 times1205791)4 = (11990324)(2120579 + 1205791)Similarly the area of the smaller fuzzy sector is (119903214)(2120575+1205751)
6 Advances in Fuzzy Systems
Thus in both cases we obtain a fuzzy diagram boundedby ten points The area of the overlapping section is obtainedusing the following formulas
Areafuzzy = 1Disradic119862 times 119869 times 119860 times119872
119862 = (minusDis + rad1 + rad2) 119869 = (Dis minus rad1 + rad2) 119860 = (Dis + rad1 minus rad2) 119872 = (Dis + rad1 + rad2)
(10)
where Dis = [1198741 minus 1198742 minus (1205901 + 1205902) 1198741 minus 1198742 + (1205901 + 1205902)] is thedistance between the centres and rad1 = [1199031 minus1205901 1199031 +1205901] andrad2 = [1199032 minus 1205902 1199032 + 1205902] are the Gaussian radii of the fuzzycircles
43 Intersection of Three Fuzzy Circles Three circles canintersect in many ways but we consider two special caseswherein we obtain circular triangles and irregular con-vex quadrilaterals However we must check whether anoverlapping area exists between the considered circles Toverify we check if either of the following conditions aresatisfied
(i) A point of intersection of two circles should be a pointinside the third circle
(ii) One of the circles should be engulfed completelyinside another circle
Case 1 Three fuzzy circles with equal numbers of parti-tions are considered implying that the radii of all threecircles are equal The overlapping area formed by thethree segments and an inner triangle whose sides are thearcs of the three circles is called a circular triangle (Fig-ure 8)
The area of the triangle is calculated using Heronrsquosformula
Area119886119887119888 = radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862) (11)
where 119878 = (12)(119860 + 119861 + 119862) 119860 = 119866119898119891[119886119909 119886119910] 119861 =119866119898119891[119887119909 119887119910] and 119862 = 119866119898119891[119888119909 119888119910]The area of the combinedoverlap is given by
Areaseg = 3sum119899=1
1198772119899sinminus1 ( 1198602119877119899) minus3sum119899=1
1198604 radic4 times 1198772119899 minus 1198602+ radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862)
(12)
Case 2 Three fuzzy circles with unequal numbers of parti-tions will have different radii In this case wemust recalculatethe overlapping segment area using the area of the biggercircle (Figure 9)
[c2 2]
[c3 3]
[c1 1]
Figure 8 Circles of equal radii intersecting and forming a circulartriangle
Step 1 We find the midpoint of the chord in the segmentwhich is given by
119909mid = 11990911989412 + 119909119894132 119910mid = 11991011989412 + 119910119894132 (13)
Step 2 We then find the equation of the line joining themidpoint and the centre of the circle which is given by
119910 = 1198611 minus 119910mid1198601 minus 119909midtimes 119909 minus 119909mid (1198611 minus 119910mid)1198601 minus 119909mid
+ 119910mid (14)
Step 3 Next we determine the points of intersection of theabove line and circle which are given by 11988311989411988811198941198882 = (1198861 + 1198871 times119898 minus 119898 times 119899 plusmn radic120575)(1 + 1198982) 11988411989411988811198941198882 = (119899 + 1198861 times 119898 + 1198871 times1198982 plusmn 119898 times radic120575)(1 + 1198982) where119898 = (1198611 minus 119910mid)(1198601 minus 119910mid)119899 = (minus119909mid times (1198611 minus 119910mid))(1198601 minus 119909mid) + 119910mid
Step 4 Finally we check whether the other two radii of thecircles are greater than the distance between the centre andthe midpoint
Thus the area of the bigger segment completely encom-passed by the bigger circle is (119877212)(1205791 minus sin 1205791)Results
(i) The regions of intersection of three equal fuzzy circleshave been considered Hence the common value ofradii has been denoted by R Here R denotes thecommon radii
(ii) Given three intersecting fuzzy circles the lines joiningthe points of intersection outside the circular trianglesatisfy 119860119862119864 = 119861119863119865 which defines Harukirsquos theorem
Advances in Fuzzy Systems 7
(Xic1 Yic1)(xi13 yi13)
(xGC> yGC>)(Xic2 Yic2)
(xi12 yi12)
Figure 9 Three intersecting circles of unequal radii
P
Q
Figure 10 Formation of irregular convex quadrilateral
(iii) The crisp circle which touches the inner circles ofthe circular triangle and its neighbouring triangles iseither tangent to the innermost circle and internallytangent to the inner circles of the neighbouringtriangles or vice versa Such a circle is called theldquoHartrsquos circlerdquo We can construct 8 such Hart circlesfor a given circular triangle
Case 3 The most complex case is that of an overlappingarea which is obtained when the circular segments form theboundary shown in Figure 10 In the process we obtain anirregular convex quadrilateral
The area of the irregular convex quadrilateral is given byAreaquad = (12)119875 times 119876 times sin120601 where 120601 is the angle betweenthe diagonals 119875 and 119876
Hence the combined area of the segments is given by
Area = sum119899=1
41198772119899sinminus1 ( 1198601198992 times 119877119899)
minus 4sum119899=1
1198601198994 radic4 times 1198772119899 minus 1198602119899(15)
Here 119860119899 is the length of the chord joining the points ofintersection of the circles There are four chords which formthe edges of the convex quadrilateral And 119877119899 is the radii ofthe circles
5 Fuzzy Particle Swarm Optimization (PSO)with Fuzzy Matrices and GMFs
51 FuzzyMatrices Amatrix of the form119875 = [119901119894119895120583]119898times119899 where119901119894119895120583 is the membership degree of the element 119901119894119895 isin is calleda fuzzy matrix
In PSO a finite number of particles define a swarmThe particles move in the 119899-dimensional space with certainvelocityThe particlersquos velocity and position are updated usingthe following formula
119881119896+1119894 = 119908 otimes 119881119896119894 oplus (1198881 otimes 119903 (sdot)) otimes (119875119896119894 ⊖ 119883119896119894 ) oplus sumℎisin120578(119894119896)
1198882otimes 119903 (sdot) otimes 120595 (119901ℎ) (119875119896119892 ⊖ 119883119896119894 )
(16)
where 120578(119894 119896) denotes the 119896 best particles in the neigh-bourhood of the particle and 120595(119901ℎ) denotes the matrixcontaining the corresponding membership degrees of theparticles defined using the GMF
8 Advances in Fuzzy Systems
52 Particle Position Initialization The positions of the par-ticles are initialized and represented in the form of a fuzzymatrix The position matrix is given by
119875119903119894119895 = [[[[[
11990111990311 11990111990312 sdot sdot sdot 1199011199031119899 d
1199011199031198991 1199011199031198992 sdot sdot sdot 119901119903119899119899]]]]] (17)
The positions of the particles for the fuzzy matrix aregenerated randomly and satisfy the following conditions
119899sum119895=1
119901119903119894119895 = 1 119875119903119894119895 isin [0 1] 119894 = 1 2 119899 (18)
53 Particle Velocity Initialization The velocity matrix isgiven by
119881119903119894119895 = [[[[[
V11990311 V11990312 sdot sdot sdot V1199031119899 d
V1199031198991 V1199031198992 sdot sdot sdot V119903119899119899
]]]]] (19)
where the velocities of the particles are generated accordingto the randomly generated position of the particles withconditions
119899sum119895=1
V119903119894119895 = 0 119894 = 1 2 119899 (20)
54 Normalization of the Particle Position Matrix The par-ticle position matrix generated using random positions maysometimes not adhere to the constraint 119875119903119894119895 isin [0 1] Hencewe need to normalize the particle position matrix The firststep in normalization involves replacing all negative values inthe matrix with zeros Then the matrix is transformed into
119875119903119894119895 =[[[[[[[
11990111990311sum119899119894=1 119901119903111989411990111990312sum119899119894=1 1199011199031119894 sdot sdot sdot
1199011199031119899sum119899119894=1 1199011199031119894 d1199011199031198991sum119899119894=1 119901119903119899119894
1199011199031198992sum119899119894=1 119901119903119899119894 sdot sdot sdot119901119903119899119899sum119899119894=1 119901119903119899119894
]]]]]]] (21)
55 Choosing the Best Agentswith120572-levels Theagent particlesare now selected based on the value of 120572 where 120572 is a realnumber in the interval [0 1] Once the agent particles areselected they are placed on the circumference of the circle ofradius 120572 Furthermore the global best position of the particleis calculated using the distance formula
119889 (119901119903119894119895 119901119903119908119895)= 18 (120590)2
119899sum119894=1
[(120583119901119903119894119895 (119909119894) minus 120583119901119903119908119895 (119909119894))2 + (1198881 minus 1198882)2] 119889 le 2120572
(22)
This process is illustrated in Figure 11
minus03minus03
minus02
minus02
minus01
minus01
0
0
01
01
02
02
03
03
Pr11
Pr12
Pr13
Figure 11 Neighbourhood for obtaining the global best agent
6 Algorithm for Fuzzy R-PSO with GMFs
The proposed algorithm provides the local best position ofparticles based on the threshold as given in Figure 12
(1) Start(2) Initialize maximum number of particles in the target
neighbourhood max119901 maximum number of itera-tions max119899
(3) Assign random position and velocity matrices for theparticles
(4) For 119894 = 0 to max119901
(a) Calculate positions and velocities of the parti-cles as given in the equation
(b) Normalize the particle positionmatrix using theequation
(5) Fix the 120572-level for the normalized particle positionmatrix
(6) If a particlersquos position in the normalized matrix is le120572then update the first neighbourhood circle
(7) Calculate the distance between the particles andlocate the global best position
(8) Stop
7 Discussion and Conclusion
The proposed methodology of constructing a fuzzy qual-itative circle with GMF provides a smoother graphs offuzzy trigonometric functions when compared to previouslydescribed methods The graphs of the curves as obtained byKaufmann and Gupta [11] flatten either the min- or max-curve depending upon the point of inflection which led toa restriction on the extent of the spread in terms of angular
Advances in Fuzzy Systems 9
minus500 minus400 minus300 minus200 minus100 0 100 200 300 400 500minus400
minus300
minus200
minus100
0
100
200
300
4004 cell
distancevelocity
Figure 12 Neighbourhood obtained using 120572-cuts
measurements This angular spread has now been definedin terms of 120590 which is the width of the GMF When 120590 =0 the Gaussian Fuzzy Circle reduces to the conventionalcrisp circle The centre of the fuzzy circle is also fuzzyand the radius is a linear combination of fuzzy numbersAlso we have demonstrated geometrical interpretation of theGQTFs and the representation of a fuzzy circle with 119899 =25GMFsThe position of a point on the fuzzy circle has beenexplained Trigonometrical identities Pythagorean identitiesand laws for obtaining solutions to triangles (ie law ofsines law of cosines and law of tangents) have been derivedThe GMFs on a fuzzy circle and Taylorrsquos series expansionshave been verified The relationship between qualitative andquantitative trigonometric states is very difficult to describehowever Gaussian fuzzy qualitative trigonometry helps indescribing their relationship In this paper we have success-fully described the intersection of fuzzy circleswhen the circleis divided into either equal or unequal numbers of partitionsand a study of circular triangles has been given The resultson circular triangles have also been verified This researcharticle gives a theoretical interpretation of applying R-PSOinside a fuzzy circle The R-PSO with fuzzy circle of radius 120572(developed using120572-cuts) reduced the premature convergenceof the standard PSO algorithm By fixing various levels of120572 global best position of the particles can be obtainedFurthermore the development of fuzzy circles with partitionsprovides a sharper boundary when compared to the existingideas of fuzzy circles and fuzzy qualitative circles
71 Future Direction The authors intend to implement thisidea in designing a navigation stick using the concept of radarWe propose to utilize this concept in designing navigationsystems for people with special needs Further this researchbeing an extension to fuzzy qualitative trigonometry will beimplemented in extensive research towards robot kinematicsand human movement analysis
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank Editage (httpswwweditagecom) for English language editing andMr MohamedE for his timely help in developing the R-PSO for fuzzy circlealgorithm using Matlab
References
[1] L A Zadeh ldquoFuzzy setsrdquo Information and Computation vol 8pp 338ndash353 1965
[2] J J Buckley and E Eslami An Introduction to Fuzzy Logicand Fuzzy Sets Physica-Verlag Heidelberg NewYork NY USA2002
[3] D A Ress Development of Fuzzy Trigonometric Functionsto support design and manufacturing [PhD Thesis] NorthCarolina University North Carolina NC USA 1999
[4] H Liu G M Coghill and D P Barnes ldquoFuzzy qualitativetrigonometryrdquo International Journal of Approximate Reasoningvol 51 pp 371ndash388 2009
[5] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIrdquo Fuzzy Sets and Systems vol 209 pp 66ndash83 2012
[6] Y Shi and R Eberhart ldquoFuzzy Adaptive Particle SwarmOptimizationrdquo in Proceedings of the Congress on EvolutionaryComputation pp 101ndash106 2001
[7] W Pang K Wang C Zhou and L Dong ldquoFuzzy discreteparticle swarm optimization for solving traveling salesmanproblemrdquo in Proceedings of the 4th International Conference onComputer and Information Technology (CIT rsquo04) pp 796ndash8002004
[8] A M Abdelbar S Abdelshahid and D C Wunsch ldquoGaussianversus Cauchy membership functions in fuzzy PSOrdquo in Pro-ceedings of the 2007 International Joint Conference on NeuralNetworks IJCNN rsquo07 August 2007
[9] M Anantathanavit and M-A Munlin ldquoRadius particle swarmoptimizationrdquo in Proceedings of the 17th International ComputerScience and Engineering Conference ICSEC rsquo13 pp 126ndash130September 2013
[10] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIIIrdquo Fuzzy Sets and Systems vol 283 pp 83ndash107 2016
[11] A Kaufmann and M M Gupta Introduction to Fuzzy Arith-metic Theory and Applications Van Nostrand Reinhold NewYork NY USA 1985
Computer Games Technology
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
Advances in
FuzzySystems
Hindawiwwwhindawicom
Volume 2018
International Journal of
ReconfigurableComputing
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
thinspArtificial Intelligence
Hindawiwwwhindawicom Volumethinsp2018
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawiwwwhindawicom Volume 2018
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Computational Intelligence and Neuroscience
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018
Human-ComputerInteraction
Advances in
Hindawiwwwhindawicom Volume 2018
Scientic Programming
Submit your manuscripts atwwwhindawicom

Advances in Fuzzy Systems 5
[c2 2]
[c1 1]
Figure 4 Circles of equal radii touching at a single point
[c2 2] [c1 1]
Figure 5 Circles of unequal radii touching at a single point
Area of Δ 3 = 12 times 1205902 times (1199032 + 1205902) =1205902 (1199032 + 1205902)2
Area of Δ 4 = 12 times 1205902 times (1199032 minus 1205902) =1205902 (1199032 minus 1205902)2
(9)
Hence the total area is = 11990311205901 + 11990321205902 The area obtained is incoherence with the traditional way of determining the area ofintersection
The intersection of circles becomes interesting when weconsider circles intersecting at two points In such a case thearea of intersection can be either symmetric or dominate asingle circle with a small portion of the second circle as acommon area
42 Fuzzy Circles Intersecting at Two Points
Case 1 Two circles have an equal number of partitions Fig-ure 6 shows the intersecting fuzzy circles From the followingdiagram we observe that the crisp points of intersectionand the common chord are obtained during the fuzzificationprocess We obtain congruent triangles in the fuzzy areaof intersection The centres of the Gaussian curves meet toproduce the crisp point of intersectionThe two points when
[c2 2] [c1 1]
Figure 6 Intersecting circles of equal radii
[c2 2] [c1 1]
Figure 7 Intersecting circles of unequal radii
joined produce the crisp common chord for the intersectingcircles
The area of the overlapping region is calculated as follows
(i) The area of each sector is (119903minus times 120579)2(ii) The length of the arc of the sector is given by 119903 times 120579(iii) Thus the area of the fuzzified sector is (1199032+ times 120579)2(iv) The area of the smaller sector is (1199032minus times 120579)2 Here 119903+ =119903 + 120590 and 119903minus = 119903 minus 120590(v) Supposing the line 119903+ cuts the smaller radius in the
ratio119898 119899 then119898 = 119903+2Thus the area is (1199032+times1205791)4and the total area is 1199032+2 times (2120579 + 1205791)
Case 2 Two circles have an unequal number of partitionswhich implies that the radii of both circles are different(Figure 7)
The area of the bigger fuzzy sector is (1199032 times 120579)2 + (1199032 times1205791)4 = (11990324)(2120579 + 1205791)Similarly the area of the smaller fuzzy sector is (119903214)(2120575+1205751)
6 Advances in Fuzzy Systems
Thus in both cases we obtain a fuzzy diagram boundedby ten points The area of the overlapping section is obtainedusing the following formulas
Areafuzzy = 1Disradic119862 times 119869 times 119860 times119872
119862 = (minusDis + rad1 + rad2) 119869 = (Dis minus rad1 + rad2) 119860 = (Dis + rad1 minus rad2) 119872 = (Dis + rad1 + rad2)
(10)
where Dis = [1198741 minus 1198742 minus (1205901 + 1205902) 1198741 minus 1198742 + (1205901 + 1205902)] is thedistance between the centres and rad1 = [1199031 minus1205901 1199031 +1205901] andrad2 = [1199032 minus 1205902 1199032 + 1205902] are the Gaussian radii of the fuzzycircles
43 Intersection of Three Fuzzy Circles Three circles canintersect in many ways but we consider two special caseswherein we obtain circular triangles and irregular con-vex quadrilaterals However we must check whether anoverlapping area exists between the considered circles Toverify we check if either of the following conditions aresatisfied
(i) A point of intersection of two circles should be a pointinside the third circle
(ii) One of the circles should be engulfed completelyinside another circle
Case 1 Three fuzzy circles with equal numbers of parti-tions are considered implying that the radii of all threecircles are equal The overlapping area formed by thethree segments and an inner triangle whose sides are thearcs of the three circles is called a circular triangle (Fig-ure 8)
The area of the triangle is calculated using Heronrsquosformula
Area119886119887119888 = radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862) (11)
where 119878 = (12)(119860 + 119861 + 119862) 119860 = 119866119898119891[119886119909 119886119910] 119861 =119866119898119891[119887119909 119887119910] and 119862 = 119866119898119891[119888119909 119888119910]The area of the combinedoverlap is given by
Areaseg = 3sum119899=1
1198772119899sinminus1 ( 1198602119877119899) minus3sum119899=1
1198604 radic4 times 1198772119899 minus 1198602+ radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862)
(12)
Case 2 Three fuzzy circles with unequal numbers of parti-tions will have different radii In this case wemust recalculatethe overlapping segment area using the area of the biggercircle (Figure 9)
[c2 2]
[c3 3]
[c1 1]
Figure 8 Circles of equal radii intersecting and forming a circulartriangle
Step 1 We find the midpoint of the chord in the segmentwhich is given by
119909mid = 11990911989412 + 119909119894132 119910mid = 11991011989412 + 119910119894132 (13)
Step 2 We then find the equation of the line joining themidpoint and the centre of the circle which is given by
119910 = 1198611 minus 119910mid1198601 minus 119909midtimes 119909 minus 119909mid (1198611 minus 119910mid)1198601 minus 119909mid
+ 119910mid (14)
Step 3 Next we determine the points of intersection of theabove line and circle which are given by 11988311989411988811198941198882 = (1198861 + 1198871 times119898 minus 119898 times 119899 plusmn radic120575)(1 + 1198982) 11988411989411988811198941198882 = (119899 + 1198861 times 119898 + 1198871 times1198982 plusmn 119898 times radic120575)(1 + 1198982) where119898 = (1198611 minus 119910mid)(1198601 minus 119910mid)119899 = (minus119909mid times (1198611 minus 119910mid))(1198601 minus 119909mid) + 119910mid
Step 4 Finally we check whether the other two radii of thecircles are greater than the distance between the centre andthe midpoint
Thus the area of the bigger segment completely encom-passed by the bigger circle is (119877212)(1205791 minus sin 1205791)Results
(i) The regions of intersection of three equal fuzzy circleshave been considered Hence the common value ofradii has been denoted by R Here R denotes thecommon radii
(ii) Given three intersecting fuzzy circles the lines joiningthe points of intersection outside the circular trianglesatisfy 119860119862119864 = 119861119863119865 which defines Harukirsquos theorem
Advances in Fuzzy Systems 7
(Xic1 Yic1)(xi13 yi13)
(xGC> yGC>)(Xic2 Yic2)
(xi12 yi12)
Figure 9 Three intersecting circles of unequal radii
P
Q
Figure 10 Formation of irregular convex quadrilateral
(iii) The crisp circle which touches the inner circles ofthe circular triangle and its neighbouring triangles iseither tangent to the innermost circle and internallytangent to the inner circles of the neighbouringtriangles or vice versa Such a circle is called theldquoHartrsquos circlerdquo We can construct 8 such Hart circlesfor a given circular triangle
Case 3 The most complex case is that of an overlappingarea which is obtained when the circular segments form theboundary shown in Figure 10 In the process we obtain anirregular convex quadrilateral
The area of the irregular convex quadrilateral is given byAreaquad = (12)119875 times 119876 times sin120601 where 120601 is the angle betweenthe diagonals 119875 and 119876
Hence the combined area of the segments is given by
Area = sum119899=1
41198772119899sinminus1 ( 1198601198992 times 119877119899)
minus 4sum119899=1
1198601198994 radic4 times 1198772119899 minus 1198602119899(15)
Here 119860119899 is the length of the chord joining the points ofintersection of the circles There are four chords which formthe edges of the convex quadrilateral And 119877119899 is the radii ofthe circles
5 Fuzzy Particle Swarm Optimization (PSO)with Fuzzy Matrices and GMFs
51 FuzzyMatrices Amatrix of the form119875 = [119901119894119895120583]119898times119899 where119901119894119895120583 is the membership degree of the element 119901119894119895 isin is calleda fuzzy matrix
In PSO a finite number of particles define a swarmThe particles move in the 119899-dimensional space with certainvelocityThe particlersquos velocity and position are updated usingthe following formula
119881119896+1119894 = 119908 otimes 119881119896119894 oplus (1198881 otimes 119903 (sdot)) otimes (119875119896119894 ⊖ 119883119896119894 ) oplus sumℎisin120578(119894119896)
1198882otimes 119903 (sdot) otimes 120595 (119901ℎ) (119875119896119892 ⊖ 119883119896119894 )
(16)
where 120578(119894 119896) denotes the 119896 best particles in the neigh-bourhood of the particle and 120595(119901ℎ) denotes the matrixcontaining the corresponding membership degrees of theparticles defined using the GMF
8 Advances in Fuzzy Systems
52 Particle Position Initialization The positions of the par-ticles are initialized and represented in the form of a fuzzymatrix The position matrix is given by
119875119903119894119895 = [[[[[
11990111990311 11990111990312 sdot sdot sdot 1199011199031119899 d
1199011199031198991 1199011199031198992 sdot sdot sdot 119901119903119899119899]]]]] (17)
The positions of the particles for the fuzzy matrix aregenerated randomly and satisfy the following conditions
119899sum119895=1
119901119903119894119895 = 1 119875119903119894119895 isin [0 1] 119894 = 1 2 119899 (18)
53 Particle Velocity Initialization The velocity matrix isgiven by
119881119903119894119895 = [[[[[
V11990311 V11990312 sdot sdot sdot V1199031119899 d
V1199031198991 V1199031198992 sdot sdot sdot V119903119899119899
]]]]] (19)
where the velocities of the particles are generated accordingto the randomly generated position of the particles withconditions
119899sum119895=1
V119903119894119895 = 0 119894 = 1 2 119899 (20)
54 Normalization of the Particle Position Matrix The par-ticle position matrix generated using random positions maysometimes not adhere to the constraint 119875119903119894119895 isin [0 1] Hencewe need to normalize the particle position matrix The firststep in normalization involves replacing all negative values inthe matrix with zeros Then the matrix is transformed into
119875119903119894119895 =[[[[[[[
11990111990311sum119899119894=1 119901119903111989411990111990312sum119899119894=1 1199011199031119894 sdot sdot sdot
1199011199031119899sum119899119894=1 1199011199031119894 d1199011199031198991sum119899119894=1 119901119903119899119894
1199011199031198992sum119899119894=1 119901119903119899119894 sdot sdot sdot119901119903119899119899sum119899119894=1 119901119903119899119894
]]]]]]] (21)
55 Choosing the Best Agentswith120572-levels Theagent particlesare now selected based on the value of 120572 where 120572 is a realnumber in the interval [0 1] Once the agent particles areselected they are placed on the circumference of the circle ofradius 120572 Furthermore the global best position of the particleis calculated using the distance formula
119889 (119901119903119894119895 119901119903119908119895)= 18 (120590)2
119899sum119894=1
[(120583119901119903119894119895 (119909119894) minus 120583119901119903119908119895 (119909119894))2 + (1198881 minus 1198882)2] 119889 le 2120572
(22)
This process is illustrated in Figure 11
minus03minus03
minus02
minus02
minus01
minus01
0
0
01
01
02
02
03
03
Pr11
Pr12
Pr13
Figure 11 Neighbourhood for obtaining the global best agent
6 Algorithm for Fuzzy R-PSO with GMFs
The proposed algorithm provides the local best position ofparticles based on the threshold as given in Figure 12
(1) Start(2) Initialize maximum number of particles in the target
neighbourhood max119901 maximum number of itera-tions max119899
(3) Assign random position and velocity matrices for theparticles
(4) For 119894 = 0 to max119901
(a) Calculate positions and velocities of the parti-cles as given in the equation
(b) Normalize the particle positionmatrix using theequation
(5) Fix the 120572-level for the normalized particle positionmatrix
(6) If a particlersquos position in the normalized matrix is le120572then update the first neighbourhood circle
(7) Calculate the distance between the particles andlocate the global best position
(8) Stop
7 Discussion and Conclusion
The proposed methodology of constructing a fuzzy qual-itative circle with GMF provides a smoother graphs offuzzy trigonometric functions when compared to previouslydescribed methods The graphs of the curves as obtained byKaufmann and Gupta [11] flatten either the min- or max-curve depending upon the point of inflection which led toa restriction on the extent of the spread in terms of angular
Advances in Fuzzy Systems 9
minus500 minus400 minus300 minus200 minus100 0 100 200 300 400 500minus400
minus300
minus200
minus100
0
100
200
300
4004 cell
distancevelocity
Figure 12 Neighbourhood obtained using 120572-cuts
measurements This angular spread has now been definedin terms of 120590 which is the width of the GMF When 120590 =0 the Gaussian Fuzzy Circle reduces to the conventionalcrisp circle The centre of the fuzzy circle is also fuzzyand the radius is a linear combination of fuzzy numbersAlso we have demonstrated geometrical interpretation of theGQTFs and the representation of a fuzzy circle with 119899 =25GMFsThe position of a point on the fuzzy circle has beenexplained Trigonometrical identities Pythagorean identitiesand laws for obtaining solutions to triangles (ie law ofsines law of cosines and law of tangents) have been derivedThe GMFs on a fuzzy circle and Taylorrsquos series expansionshave been verified The relationship between qualitative andquantitative trigonometric states is very difficult to describehowever Gaussian fuzzy qualitative trigonometry helps indescribing their relationship In this paper we have success-fully described the intersection of fuzzy circleswhen the circleis divided into either equal or unequal numbers of partitionsand a study of circular triangles has been given The resultson circular triangles have also been verified This researcharticle gives a theoretical interpretation of applying R-PSOinside a fuzzy circle The R-PSO with fuzzy circle of radius 120572(developed using120572-cuts) reduced the premature convergenceof the standard PSO algorithm By fixing various levels of120572 global best position of the particles can be obtainedFurthermore the development of fuzzy circles with partitionsprovides a sharper boundary when compared to the existingideas of fuzzy circles and fuzzy qualitative circles
71 Future Direction The authors intend to implement thisidea in designing a navigation stick using the concept of radarWe propose to utilize this concept in designing navigationsystems for people with special needs Further this researchbeing an extension to fuzzy qualitative trigonometry will beimplemented in extensive research towards robot kinematicsand human movement analysis
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank Editage (httpswwweditagecom) for English language editing andMr MohamedE for his timely help in developing the R-PSO for fuzzy circlealgorithm using Matlab
References
[1] L A Zadeh ldquoFuzzy setsrdquo Information and Computation vol 8pp 338ndash353 1965
[2] J J Buckley and E Eslami An Introduction to Fuzzy Logicand Fuzzy Sets Physica-Verlag Heidelberg NewYork NY USA2002
[3] D A Ress Development of Fuzzy Trigonometric Functionsto support design and manufacturing [PhD Thesis] NorthCarolina University North Carolina NC USA 1999
[4] H Liu G M Coghill and D P Barnes ldquoFuzzy qualitativetrigonometryrdquo International Journal of Approximate Reasoningvol 51 pp 371ndash388 2009
[5] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIrdquo Fuzzy Sets and Systems vol 209 pp 66ndash83 2012
[6] Y Shi and R Eberhart ldquoFuzzy Adaptive Particle SwarmOptimizationrdquo in Proceedings of the Congress on EvolutionaryComputation pp 101ndash106 2001
[7] W Pang K Wang C Zhou and L Dong ldquoFuzzy discreteparticle swarm optimization for solving traveling salesmanproblemrdquo in Proceedings of the 4th International Conference onComputer and Information Technology (CIT rsquo04) pp 796ndash8002004
[8] A M Abdelbar S Abdelshahid and D C Wunsch ldquoGaussianversus Cauchy membership functions in fuzzy PSOrdquo in Pro-ceedings of the 2007 International Joint Conference on NeuralNetworks IJCNN rsquo07 August 2007
[9] M Anantathanavit and M-A Munlin ldquoRadius particle swarmoptimizationrdquo in Proceedings of the 17th International ComputerScience and Engineering Conference ICSEC rsquo13 pp 126ndash130September 2013
[10] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIIIrdquo Fuzzy Sets and Systems vol 283 pp 83ndash107 2016
[11] A Kaufmann and M M Gupta Introduction to Fuzzy Arith-metic Theory and Applications Van Nostrand Reinhold NewYork NY USA 1985
Computer Games Technology
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
Advances in
FuzzySystems
Hindawiwwwhindawicom
Volume 2018
International Journal of
ReconfigurableComputing
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
thinspArtificial Intelligence
Hindawiwwwhindawicom Volumethinsp2018
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawiwwwhindawicom Volume 2018
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Computational Intelligence and Neuroscience
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018
Human-ComputerInteraction
Advances in
Hindawiwwwhindawicom Volume 2018
Scientic Programming
Submit your manuscripts atwwwhindawicom

6 Advances in Fuzzy Systems
Thus in both cases we obtain a fuzzy diagram boundedby ten points The area of the overlapping section is obtainedusing the following formulas
Areafuzzy = 1Disradic119862 times 119869 times 119860 times119872
119862 = (minusDis + rad1 + rad2) 119869 = (Dis minus rad1 + rad2) 119860 = (Dis + rad1 minus rad2) 119872 = (Dis + rad1 + rad2)
(10)
where Dis = [1198741 minus 1198742 minus (1205901 + 1205902) 1198741 minus 1198742 + (1205901 + 1205902)] is thedistance between the centres and rad1 = [1199031 minus1205901 1199031 +1205901] andrad2 = [1199032 minus 1205902 1199032 + 1205902] are the Gaussian radii of the fuzzycircles
43 Intersection of Three Fuzzy Circles Three circles canintersect in many ways but we consider two special caseswherein we obtain circular triangles and irregular con-vex quadrilaterals However we must check whether anoverlapping area exists between the considered circles Toverify we check if either of the following conditions aresatisfied
(i) A point of intersection of two circles should be a pointinside the third circle
(ii) One of the circles should be engulfed completelyinside another circle
Case 1 Three fuzzy circles with equal numbers of parti-tions are considered implying that the radii of all threecircles are equal The overlapping area formed by thethree segments and an inner triangle whose sides are thearcs of the three circles is called a circular triangle (Fig-ure 8)
The area of the triangle is calculated using Heronrsquosformula
Area119886119887119888 = radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862) (11)
where 119878 = (12)(119860 + 119861 + 119862) 119860 = 119866119898119891[119886119909 119886119910] 119861 =119866119898119891[119887119909 119887119910] and 119862 = 119866119898119891[119888119909 119888119910]The area of the combinedoverlap is given by
Areaseg = 3sum119899=1
1198772119899sinminus1 ( 1198602119877119899) minus3sum119899=1
1198604 radic4 times 1198772119899 minus 1198602+ radic119878 (119878 minus 119860) (119878 minus 119861) (119878 minus 119862)
(12)
Case 2 Three fuzzy circles with unequal numbers of parti-tions will have different radii In this case wemust recalculatethe overlapping segment area using the area of the biggercircle (Figure 9)
[c2 2]
[c3 3]
[c1 1]
Figure 8 Circles of equal radii intersecting and forming a circulartriangle
Step 1 We find the midpoint of the chord in the segmentwhich is given by
119909mid = 11990911989412 + 119909119894132 119910mid = 11991011989412 + 119910119894132 (13)
Step 2 We then find the equation of the line joining themidpoint and the centre of the circle which is given by
119910 = 1198611 minus 119910mid1198601 minus 119909midtimes 119909 minus 119909mid (1198611 minus 119910mid)1198601 minus 119909mid
+ 119910mid (14)
Step 3 Next we determine the points of intersection of theabove line and circle which are given by 11988311989411988811198941198882 = (1198861 + 1198871 times119898 minus 119898 times 119899 plusmn radic120575)(1 + 1198982) 11988411989411988811198941198882 = (119899 + 1198861 times 119898 + 1198871 times1198982 plusmn 119898 times radic120575)(1 + 1198982) where119898 = (1198611 minus 119910mid)(1198601 minus 119910mid)119899 = (minus119909mid times (1198611 minus 119910mid))(1198601 minus 119909mid) + 119910mid
Step 4 Finally we check whether the other two radii of thecircles are greater than the distance between the centre andthe midpoint
Thus the area of the bigger segment completely encom-passed by the bigger circle is (119877212)(1205791 minus sin 1205791)Results
(i) The regions of intersection of three equal fuzzy circleshave been considered Hence the common value ofradii has been denoted by R Here R denotes thecommon radii
(ii) Given three intersecting fuzzy circles the lines joiningthe points of intersection outside the circular trianglesatisfy 119860119862119864 = 119861119863119865 which defines Harukirsquos theorem
Advances in Fuzzy Systems 7
(Xic1 Yic1)(xi13 yi13)
(xGC> yGC>)(Xic2 Yic2)
(xi12 yi12)
Figure 9 Three intersecting circles of unequal radii
P
Q
Figure 10 Formation of irregular convex quadrilateral
(iii) The crisp circle which touches the inner circles ofthe circular triangle and its neighbouring triangles iseither tangent to the innermost circle and internallytangent to the inner circles of the neighbouringtriangles or vice versa Such a circle is called theldquoHartrsquos circlerdquo We can construct 8 such Hart circlesfor a given circular triangle
Case 3 The most complex case is that of an overlappingarea which is obtained when the circular segments form theboundary shown in Figure 10 In the process we obtain anirregular convex quadrilateral
The area of the irregular convex quadrilateral is given byAreaquad = (12)119875 times 119876 times sin120601 where 120601 is the angle betweenthe diagonals 119875 and 119876
Hence the combined area of the segments is given by
Area = sum119899=1
41198772119899sinminus1 ( 1198601198992 times 119877119899)
minus 4sum119899=1
1198601198994 radic4 times 1198772119899 minus 1198602119899(15)
Here 119860119899 is the length of the chord joining the points ofintersection of the circles There are four chords which formthe edges of the convex quadrilateral And 119877119899 is the radii ofthe circles
5 Fuzzy Particle Swarm Optimization (PSO)with Fuzzy Matrices and GMFs
51 FuzzyMatrices Amatrix of the form119875 = [119901119894119895120583]119898times119899 where119901119894119895120583 is the membership degree of the element 119901119894119895 isin is calleda fuzzy matrix
In PSO a finite number of particles define a swarmThe particles move in the 119899-dimensional space with certainvelocityThe particlersquos velocity and position are updated usingthe following formula
119881119896+1119894 = 119908 otimes 119881119896119894 oplus (1198881 otimes 119903 (sdot)) otimes (119875119896119894 ⊖ 119883119896119894 ) oplus sumℎisin120578(119894119896)
1198882otimes 119903 (sdot) otimes 120595 (119901ℎ) (119875119896119892 ⊖ 119883119896119894 )
(16)
where 120578(119894 119896) denotes the 119896 best particles in the neigh-bourhood of the particle and 120595(119901ℎ) denotes the matrixcontaining the corresponding membership degrees of theparticles defined using the GMF
8 Advances in Fuzzy Systems
52 Particle Position Initialization The positions of the par-ticles are initialized and represented in the form of a fuzzymatrix The position matrix is given by
119875119903119894119895 = [[[[[
11990111990311 11990111990312 sdot sdot sdot 1199011199031119899 d
1199011199031198991 1199011199031198992 sdot sdot sdot 119901119903119899119899]]]]] (17)
The positions of the particles for the fuzzy matrix aregenerated randomly and satisfy the following conditions
119899sum119895=1
119901119903119894119895 = 1 119875119903119894119895 isin [0 1] 119894 = 1 2 119899 (18)
53 Particle Velocity Initialization The velocity matrix isgiven by
119881119903119894119895 = [[[[[
V11990311 V11990312 sdot sdot sdot V1199031119899 d
V1199031198991 V1199031198992 sdot sdot sdot V119903119899119899
]]]]] (19)
where the velocities of the particles are generated accordingto the randomly generated position of the particles withconditions
119899sum119895=1
V119903119894119895 = 0 119894 = 1 2 119899 (20)
54 Normalization of the Particle Position Matrix The par-ticle position matrix generated using random positions maysometimes not adhere to the constraint 119875119903119894119895 isin [0 1] Hencewe need to normalize the particle position matrix The firststep in normalization involves replacing all negative values inthe matrix with zeros Then the matrix is transformed into
119875119903119894119895 =[[[[[[[
11990111990311sum119899119894=1 119901119903111989411990111990312sum119899119894=1 1199011199031119894 sdot sdot sdot
1199011199031119899sum119899119894=1 1199011199031119894 d1199011199031198991sum119899119894=1 119901119903119899119894
1199011199031198992sum119899119894=1 119901119903119899119894 sdot sdot sdot119901119903119899119899sum119899119894=1 119901119903119899119894
]]]]]]] (21)
55 Choosing the Best Agentswith120572-levels Theagent particlesare now selected based on the value of 120572 where 120572 is a realnumber in the interval [0 1] Once the agent particles areselected they are placed on the circumference of the circle ofradius 120572 Furthermore the global best position of the particleis calculated using the distance formula
119889 (119901119903119894119895 119901119903119908119895)= 18 (120590)2
119899sum119894=1
[(120583119901119903119894119895 (119909119894) minus 120583119901119903119908119895 (119909119894))2 + (1198881 minus 1198882)2] 119889 le 2120572
(22)
This process is illustrated in Figure 11
minus03minus03
minus02
minus02
minus01
minus01
0
0
01
01
02
02
03
03
Pr11
Pr12
Pr13
Figure 11 Neighbourhood for obtaining the global best agent
6 Algorithm for Fuzzy R-PSO with GMFs
The proposed algorithm provides the local best position ofparticles based on the threshold as given in Figure 12
(1) Start(2) Initialize maximum number of particles in the target
neighbourhood max119901 maximum number of itera-tions max119899
(3) Assign random position and velocity matrices for theparticles
(4) For 119894 = 0 to max119901
(a) Calculate positions and velocities of the parti-cles as given in the equation
(b) Normalize the particle positionmatrix using theequation
(5) Fix the 120572-level for the normalized particle positionmatrix
(6) If a particlersquos position in the normalized matrix is le120572then update the first neighbourhood circle
(7) Calculate the distance between the particles andlocate the global best position
(8) Stop
7 Discussion and Conclusion
The proposed methodology of constructing a fuzzy qual-itative circle with GMF provides a smoother graphs offuzzy trigonometric functions when compared to previouslydescribed methods The graphs of the curves as obtained byKaufmann and Gupta [11] flatten either the min- or max-curve depending upon the point of inflection which led toa restriction on the extent of the spread in terms of angular
Advances in Fuzzy Systems 9
minus500 minus400 minus300 minus200 minus100 0 100 200 300 400 500minus400
minus300
minus200
minus100
0
100
200
300
4004 cell
distancevelocity
Figure 12 Neighbourhood obtained using 120572-cuts
measurements This angular spread has now been definedin terms of 120590 which is the width of the GMF When 120590 =0 the Gaussian Fuzzy Circle reduces to the conventionalcrisp circle The centre of the fuzzy circle is also fuzzyand the radius is a linear combination of fuzzy numbersAlso we have demonstrated geometrical interpretation of theGQTFs and the representation of a fuzzy circle with 119899 =25GMFsThe position of a point on the fuzzy circle has beenexplained Trigonometrical identities Pythagorean identitiesand laws for obtaining solutions to triangles (ie law ofsines law of cosines and law of tangents) have been derivedThe GMFs on a fuzzy circle and Taylorrsquos series expansionshave been verified The relationship between qualitative andquantitative trigonometric states is very difficult to describehowever Gaussian fuzzy qualitative trigonometry helps indescribing their relationship In this paper we have success-fully described the intersection of fuzzy circleswhen the circleis divided into either equal or unequal numbers of partitionsand a study of circular triangles has been given The resultson circular triangles have also been verified This researcharticle gives a theoretical interpretation of applying R-PSOinside a fuzzy circle The R-PSO with fuzzy circle of radius 120572(developed using120572-cuts) reduced the premature convergenceof the standard PSO algorithm By fixing various levels of120572 global best position of the particles can be obtainedFurthermore the development of fuzzy circles with partitionsprovides a sharper boundary when compared to the existingideas of fuzzy circles and fuzzy qualitative circles
71 Future Direction The authors intend to implement thisidea in designing a navigation stick using the concept of radarWe propose to utilize this concept in designing navigationsystems for people with special needs Further this researchbeing an extension to fuzzy qualitative trigonometry will beimplemented in extensive research towards robot kinematicsand human movement analysis
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank Editage (httpswwweditagecom) for English language editing andMr MohamedE for his timely help in developing the R-PSO for fuzzy circlealgorithm using Matlab
References
[1] L A Zadeh ldquoFuzzy setsrdquo Information and Computation vol 8pp 338ndash353 1965
[2] J J Buckley and E Eslami An Introduction to Fuzzy Logicand Fuzzy Sets Physica-Verlag Heidelberg NewYork NY USA2002
[3] D A Ress Development of Fuzzy Trigonometric Functionsto support design and manufacturing [PhD Thesis] NorthCarolina University North Carolina NC USA 1999
[4] H Liu G M Coghill and D P Barnes ldquoFuzzy qualitativetrigonometryrdquo International Journal of Approximate Reasoningvol 51 pp 371ndash388 2009
[5] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIrdquo Fuzzy Sets and Systems vol 209 pp 66ndash83 2012
[6] Y Shi and R Eberhart ldquoFuzzy Adaptive Particle SwarmOptimizationrdquo in Proceedings of the Congress on EvolutionaryComputation pp 101ndash106 2001
[7] W Pang K Wang C Zhou and L Dong ldquoFuzzy discreteparticle swarm optimization for solving traveling salesmanproblemrdquo in Proceedings of the 4th International Conference onComputer and Information Technology (CIT rsquo04) pp 796ndash8002004
[8] A M Abdelbar S Abdelshahid and D C Wunsch ldquoGaussianversus Cauchy membership functions in fuzzy PSOrdquo in Pro-ceedings of the 2007 International Joint Conference on NeuralNetworks IJCNN rsquo07 August 2007
[9] M Anantathanavit and M-A Munlin ldquoRadius particle swarmoptimizationrdquo in Proceedings of the 17th International ComputerScience and Engineering Conference ICSEC rsquo13 pp 126ndash130September 2013
[10] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIIIrdquo Fuzzy Sets and Systems vol 283 pp 83ndash107 2016
[11] A Kaufmann and M M Gupta Introduction to Fuzzy Arith-metic Theory and Applications Van Nostrand Reinhold NewYork NY USA 1985
Computer Games Technology
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
Advances in
FuzzySystems
Hindawiwwwhindawicom
Volume 2018
International Journal of
ReconfigurableComputing
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
thinspArtificial Intelligence
Hindawiwwwhindawicom Volumethinsp2018
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawiwwwhindawicom Volume 2018
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Computational Intelligence and Neuroscience
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018
Human-ComputerInteraction
Advances in
Hindawiwwwhindawicom Volume 2018
Scientic Programming
Submit your manuscripts atwwwhindawicom

Advances in Fuzzy Systems 7
(Xic1 Yic1)(xi13 yi13)
(xGC> yGC>)(Xic2 Yic2)
(xi12 yi12)
Figure 9 Three intersecting circles of unequal radii
P
Q
Figure 10 Formation of irregular convex quadrilateral
(iii) The crisp circle which touches the inner circles ofthe circular triangle and its neighbouring triangles iseither tangent to the innermost circle and internallytangent to the inner circles of the neighbouringtriangles or vice versa Such a circle is called theldquoHartrsquos circlerdquo We can construct 8 such Hart circlesfor a given circular triangle
Case 3 The most complex case is that of an overlappingarea which is obtained when the circular segments form theboundary shown in Figure 10 In the process we obtain anirregular convex quadrilateral
The area of the irregular convex quadrilateral is given byAreaquad = (12)119875 times 119876 times sin120601 where 120601 is the angle betweenthe diagonals 119875 and 119876
Hence the combined area of the segments is given by
Area = sum119899=1
41198772119899sinminus1 ( 1198601198992 times 119877119899)
minus 4sum119899=1
1198601198994 radic4 times 1198772119899 minus 1198602119899(15)
Here 119860119899 is the length of the chord joining the points ofintersection of the circles There are four chords which formthe edges of the convex quadrilateral And 119877119899 is the radii ofthe circles
5 Fuzzy Particle Swarm Optimization (PSO)with Fuzzy Matrices and GMFs
51 FuzzyMatrices Amatrix of the form119875 = [119901119894119895120583]119898times119899 where119901119894119895120583 is the membership degree of the element 119901119894119895 isin is calleda fuzzy matrix
In PSO a finite number of particles define a swarmThe particles move in the 119899-dimensional space with certainvelocityThe particlersquos velocity and position are updated usingthe following formula
119881119896+1119894 = 119908 otimes 119881119896119894 oplus (1198881 otimes 119903 (sdot)) otimes (119875119896119894 ⊖ 119883119896119894 ) oplus sumℎisin120578(119894119896)
1198882otimes 119903 (sdot) otimes 120595 (119901ℎ) (119875119896119892 ⊖ 119883119896119894 )
(16)
where 120578(119894 119896) denotes the 119896 best particles in the neigh-bourhood of the particle and 120595(119901ℎ) denotes the matrixcontaining the corresponding membership degrees of theparticles defined using the GMF
8 Advances in Fuzzy Systems
52 Particle Position Initialization The positions of the par-ticles are initialized and represented in the form of a fuzzymatrix The position matrix is given by
119875119903119894119895 = [[[[[
11990111990311 11990111990312 sdot sdot sdot 1199011199031119899 d
1199011199031198991 1199011199031198992 sdot sdot sdot 119901119903119899119899]]]]] (17)
The positions of the particles for the fuzzy matrix aregenerated randomly and satisfy the following conditions
119899sum119895=1
119901119903119894119895 = 1 119875119903119894119895 isin [0 1] 119894 = 1 2 119899 (18)
53 Particle Velocity Initialization The velocity matrix isgiven by
119881119903119894119895 = [[[[[
V11990311 V11990312 sdot sdot sdot V1199031119899 d
V1199031198991 V1199031198992 sdot sdot sdot V119903119899119899
]]]]] (19)
where the velocities of the particles are generated accordingto the randomly generated position of the particles withconditions
119899sum119895=1
V119903119894119895 = 0 119894 = 1 2 119899 (20)
54 Normalization of the Particle Position Matrix The par-ticle position matrix generated using random positions maysometimes not adhere to the constraint 119875119903119894119895 isin [0 1] Hencewe need to normalize the particle position matrix The firststep in normalization involves replacing all negative values inthe matrix with zeros Then the matrix is transformed into
119875119903119894119895 =[[[[[[[
11990111990311sum119899119894=1 119901119903111989411990111990312sum119899119894=1 1199011199031119894 sdot sdot sdot
1199011199031119899sum119899119894=1 1199011199031119894 d1199011199031198991sum119899119894=1 119901119903119899119894
1199011199031198992sum119899119894=1 119901119903119899119894 sdot sdot sdot119901119903119899119899sum119899119894=1 119901119903119899119894
]]]]]]] (21)
55 Choosing the Best Agentswith120572-levels Theagent particlesare now selected based on the value of 120572 where 120572 is a realnumber in the interval [0 1] Once the agent particles areselected they are placed on the circumference of the circle ofradius 120572 Furthermore the global best position of the particleis calculated using the distance formula
119889 (119901119903119894119895 119901119903119908119895)= 18 (120590)2
119899sum119894=1
[(120583119901119903119894119895 (119909119894) minus 120583119901119903119908119895 (119909119894))2 + (1198881 minus 1198882)2] 119889 le 2120572
(22)
This process is illustrated in Figure 11
minus03minus03
minus02
minus02
minus01
minus01
0
0
01
01
02
02
03
03
Pr11
Pr12
Pr13
Figure 11 Neighbourhood for obtaining the global best agent
6 Algorithm for Fuzzy R-PSO with GMFs
The proposed algorithm provides the local best position ofparticles based on the threshold as given in Figure 12
(1) Start(2) Initialize maximum number of particles in the target
neighbourhood max119901 maximum number of itera-tions max119899
(3) Assign random position and velocity matrices for theparticles
(4) For 119894 = 0 to max119901
(a) Calculate positions and velocities of the parti-cles as given in the equation
(b) Normalize the particle positionmatrix using theequation
(5) Fix the 120572-level for the normalized particle positionmatrix
(6) If a particlersquos position in the normalized matrix is le120572then update the first neighbourhood circle
(7) Calculate the distance between the particles andlocate the global best position
(8) Stop
7 Discussion and Conclusion
The proposed methodology of constructing a fuzzy qual-itative circle with GMF provides a smoother graphs offuzzy trigonometric functions when compared to previouslydescribed methods The graphs of the curves as obtained byKaufmann and Gupta [11] flatten either the min- or max-curve depending upon the point of inflection which led toa restriction on the extent of the spread in terms of angular
Advances in Fuzzy Systems 9
minus500 minus400 minus300 minus200 minus100 0 100 200 300 400 500minus400
minus300
minus200
minus100
0
100
200
300
4004 cell
distancevelocity
Figure 12 Neighbourhood obtained using 120572-cuts
measurements This angular spread has now been definedin terms of 120590 which is the width of the GMF When 120590 =0 the Gaussian Fuzzy Circle reduces to the conventionalcrisp circle The centre of the fuzzy circle is also fuzzyand the radius is a linear combination of fuzzy numbersAlso we have demonstrated geometrical interpretation of theGQTFs and the representation of a fuzzy circle with 119899 =25GMFsThe position of a point on the fuzzy circle has beenexplained Trigonometrical identities Pythagorean identitiesand laws for obtaining solutions to triangles (ie law ofsines law of cosines and law of tangents) have been derivedThe GMFs on a fuzzy circle and Taylorrsquos series expansionshave been verified The relationship between qualitative andquantitative trigonometric states is very difficult to describehowever Gaussian fuzzy qualitative trigonometry helps indescribing their relationship In this paper we have success-fully described the intersection of fuzzy circleswhen the circleis divided into either equal or unequal numbers of partitionsand a study of circular triangles has been given The resultson circular triangles have also been verified This researcharticle gives a theoretical interpretation of applying R-PSOinside a fuzzy circle The R-PSO with fuzzy circle of radius 120572(developed using120572-cuts) reduced the premature convergenceof the standard PSO algorithm By fixing various levels of120572 global best position of the particles can be obtainedFurthermore the development of fuzzy circles with partitionsprovides a sharper boundary when compared to the existingideas of fuzzy circles and fuzzy qualitative circles
71 Future Direction The authors intend to implement thisidea in designing a navigation stick using the concept of radarWe propose to utilize this concept in designing navigationsystems for people with special needs Further this researchbeing an extension to fuzzy qualitative trigonometry will beimplemented in extensive research towards robot kinematicsand human movement analysis
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank Editage (httpswwweditagecom) for English language editing andMr MohamedE for his timely help in developing the R-PSO for fuzzy circlealgorithm using Matlab
References
[1] L A Zadeh ldquoFuzzy setsrdquo Information and Computation vol 8pp 338ndash353 1965
[2] J J Buckley and E Eslami An Introduction to Fuzzy Logicand Fuzzy Sets Physica-Verlag Heidelberg NewYork NY USA2002
[3] D A Ress Development of Fuzzy Trigonometric Functionsto support design and manufacturing [PhD Thesis] NorthCarolina University North Carolina NC USA 1999
[4] H Liu G M Coghill and D P Barnes ldquoFuzzy qualitativetrigonometryrdquo International Journal of Approximate Reasoningvol 51 pp 371ndash388 2009
[5] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIrdquo Fuzzy Sets and Systems vol 209 pp 66ndash83 2012
[6] Y Shi and R Eberhart ldquoFuzzy Adaptive Particle SwarmOptimizationrdquo in Proceedings of the Congress on EvolutionaryComputation pp 101ndash106 2001
[7] W Pang K Wang C Zhou and L Dong ldquoFuzzy discreteparticle swarm optimization for solving traveling salesmanproblemrdquo in Proceedings of the 4th International Conference onComputer and Information Technology (CIT rsquo04) pp 796ndash8002004
[8] A M Abdelbar S Abdelshahid and D C Wunsch ldquoGaussianversus Cauchy membership functions in fuzzy PSOrdquo in Pro-ceedings of the 2007 International Joint Conference on NeuralNetworks IJCNN rsquo07 August 2007
[9] M Anantathanavit and M-A Munlin ldquoRadius particle swarmoptimizationrdquo in Proceedings of the 17th International ComputerScience and Engineering Conference ICSEC rsquo13 pp 126ndash130September 2013
[10] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIIIrdquo Fuzzy Sets and Systems vol 283 pp 83ndash107 2016
[11] A Kaufmann and M M Gupta Introduction to Fuzzy Arith-metic Theory and Applications Van Nostrand Reinhold NewYork NY USA 1985
Computer Games Technology
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
Advances in
FuzzySystems
Hindawiwwwhindawicom
Volume 2018
International Journal of
ReconfigurableComputing
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
thinspArtificial Intelligence
Hindawiwwwhindawicom Volumethinsp2018
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawiwwwhindawicom Volume 2018
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Computational Intelligence and Neuroscience
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018
Human-ComputerInteraction
Advances in
Hindawiwwwhindawicom Volume 2018
Scientic Programming
Submit your manuscripts atwwwhindawicom

8 Advances in Fuzzy Systems
52 Particle Position Initialization The positions of the par-ticles are initialized and represented in the form of a fuzzymatrix The position matrix is given by
119875119903119894119895 = [[[[[
11990111990311 11990111990312 sdot sdot sdot 1199011199031119899 d
1199011199031198991 1199011199031198992 sdot sdot sdot 119901119903119899119899]]]]] (17)
The positions of the particles for the fuzzy matrix aregenerated randomly and satisfy the following conditions
119899sum119895=1
119901119903119894119895 = 1 119875119903119894119895 isin [0 1] 119894 = 1 2 119899 (18)
53 Particle Velocity Initialization The velocity matrix isgiven by
119881119903119894119895 = [[[[[
V11990311 V11990312 sdot sdot sdot V1199031119899 d
V1199031198991 V1199031198992 sdot sdot sdot V119903119899119899
]]]]] (19)
where the velocities of the particles are generated accordingto the randomly generated position of the particles withconditions
119899sum119895=1
V119903119894119895 = 0 119894 = 1 2 119899 (20)
54 Normalization of the Particle Position Matrix The par-ticle position matrix generated using random positions maysometimes not adhere to the constraint 119875119903119894119895 isin [0 1] Hencewe need to normalize the particle position matrix The firststep in normalization involves replacing all negative values inthe matrix with zeros Then the matrix is transformed into
119875119903119894119895 =[[[[[[[
11990111990311sum119899119894=1 119901119903111989411990111990312sum119899119894=1 1199011199031119894 sdot sdot sdot
1199011199031119899sum119899119894=1 1199011199031119894 d1199011199031198991sum119899119894=1 119901119903119899119894
1199011199031198992sum119899119894=1 119901119903119899119894 sdot sdot sdot119901119903119899119899sum119899119894=1 119901119903119899119894
]]]]]]] (21)
55 Choosing the Best Agentswith120572-levels Theagent particlesare now selected based on the value of 120572 where 120572 is a realnumber in the interval [0 1] Once the agent particles areselected they are placed on the circumference of the circle ofradius 120572 Furthermore the global best position of the particleis calculated using the distance formula
119889 (119901119903119894119895 119901119903119908119895)= 18 (120590)2
119899sum119894=1
[(120583119901119903119894119895 (119909119894) minus 120583119901119903119908119895 (119909119894))2 + (1198881 minus 1198882)2] 119889 le 2120572
(22)
This process is illustrated in Figure 11
minus03minus03
minus02
minus02
minus01
minus01
0
0
01
01
02
02
03
03
Pr11
Pr12
Pr13
Figure 11 Neighbourhood for obtaining the global best agent
6 Algorithm for Fuzzy R-PSO with GMFs
The proposed algorithm provides the local best position ofparticles based on the threshold as given in Figure 12
(1) Start(2) Initialize maximum number of particles in the target
neighbourhood max119901 maximum number of itera-tions max119899
(3) Assign random position and velocity matrices for theparticles
(4) For 119894 = 0 to max119901
(a) Calculate positions and velocities of the parti-cles as given in the equation
(b) Normalize the particle positionmatrix using theequation
(5) Fix the 120572-level for the normalized particle positionmatrix
(6) If a particlersquos position in the normalized matrix is le120572then update the first neighbourhood circle
(7) Calculate the distance between the particles andlocate the global best position
(8) Stop
7 Discussion and Conclusion
The proposed methodology of constructing a fuzzy qual-itative circle with GMF provides a smoother graphs offuzzy trigonometric functions when compared to previouslydescribed methods The graphs of the curves as obtained byKaufmann and Gupta [11] flatten either the min- or max-curve depending upon the point of inflection which led toa restriction on the extent of the spread in terms of angular
Advances in Fuzzy Systems 9
minus500 minus400 minus300 minus200 minus100 0 100 200 300 400 500minus400
minus300
minus200
minus100
0
100
200
300
4004 cell
distancevelocity
Figure 12 Neighbourhood obtained using 120572-cuts
measurements This angular spread has now been definedin terms of 120590 which is the width of the GMF When 120590 =0 the Gaussian Fuzzy Circle reduces to the conventionalcrisp circle The centre of the fuzzy circle is also fuzzyand the radius is a linear combination of fuzzy numbersAlso we have demonstrated geometrical interpretation of theGQTFs and the representation of a fuzzy circle with 119899 =25GMFsThe position of a point on the fuzzy circle has beenexplained Trigonometrical identities Pythagorean identitiesand laws for obtaining solutions to triangles (ie law ofsines law of cosines and law of tangents) have been derivedThe GMFs on a fuzzy circle and Taylorrsquos series expansionshave been verified The relationship between qualitative andquantitative trigonometric states is very difficult to describehowever Gaussian fuzzy qualitative trigonometry helps indescribing their relationship In this paper we have success-fully described the intersection of fuzzy circleswhen the circleis divided into either equal or unequal numbers of partitionsand a study of circular triangles has been given The resultson circular triangles have also been verified This researcharticle gives a theoretical interpretation of applying R-PSOinside a fuzzy circle The R-PSO with fuzzy circle of radius 120572(developed using120572-cuts) reduced the premature convergenceof the standard PSO algorithm By fixing various levels of120572 global best position of the particles can be obtainedFurthermore the development of fuzzy circles with partitionsprovides a sharper boundary when compared to the existingideas of fuzzy circles and fuzzy qualitative circles
71 Future Direction The authors intend to implement thisidea in designing a navigation stick using the concept of radarWe propose to utilize this concept in designing navigationsystems for people with special needs Further this researchbeing an extension to fuzzy qualitative trigonometry will beimplemented in extensive research towards robot kinematicsand human movement analysis
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank Editage (httpswwweditagecom) for English language editing andMr MohamedE for his timely help in developing the R-PSO for fuzzy circlealgorithm using Matlab
References
[1] L A Zadeh ldquoFuzzy setsrdquo Information and Computation vol 8pp 338ndash353 1965
[2] J J Buckley and E Eslami An Introduction to Fuzzy Logicand Fuzzy Sets Physica-Verlag Heidelberg NewYork NY USA2002
[3] D A Ress Development of Fuzzy Trigonometric Functionsto support design and manufacturing [PhD Thesis] NorthCarolina University North Carolina NC USA 1999
[4] H Liu G M Coghill and D P Barnes ldquoFuzzy qualitativetrigonometryrdquo International Journal of Approximate Reasoningvol 51 pp 371ndash388 2009
[5] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIrdquo Fuzzy Sets and Systems vol 209 pp 66ndash83 2012
[6] Y Shi and R Eberhart ldquoFuzzy Adaptive Particle SwarmOptimizationrdquo in Proceedings of the Congress on EvolutionaryComputation pp 101ndash106 2001
[7] W Pang K Wang C Zhou and L Dong ldquoFuzzy discreteparticle swarm optimization for solving traveling salesmanproblemrdquo in Proceedings of the 4th International Conference onComputer and Information Technology (CIT rsquo04) pp 796ndash8002004
[8] A M Abdelbar S Abdelshahid and D C Wunsch ldquoGaussianversus Cauchy membership functions in fuzzy PSOrdquo in Pro-ceedings of the 2007 International Joint Conference on NeuralNetworks IJCNN rsquo07 August 2007
[9] M Anantathanavit and M-A Munlin ldquoRadius particle swarmoptimizationrdquo in Proceedings of the 17th International ComputerScience and Engineering Conference ICSEC rsquo13 pp 126ndash130September 2013
[10] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIIIrdquo Fuzzy Sets and Systems vol 283 pp 83ndash107 2016
[11] A Kaufmann and M M Gupta Introduction to Fuzzy Arith-metic Theory and Applications Van Nostrand Reinhold NewYork NY USA 1985
Computer Games Technology
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
Advances in
FuzzySystems
Hindawiwwwhindawicom
Volume 2018
International Journal of
ReconfigurableComputing
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
thinspArtificial Intelligence
Hindawiwwwhindawicom Volumethinsp2018
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawiwwwhindawicom Volume 2018
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Computational Intelligence and Neuroscience
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018
Human-ComputerInteraction
Advances in
Hindawiwwwhindawicom Volume 2018
Scientic Programming
Submit your manuscripts atwwwhindawicom

Advances in Fuzzy Systems 9
minus500 minus400 minus300 minus200 minus100 0 100 200 300 400 500minus400
minus300
minus200
minus100
0
100
200
300
4004 cell
distancevelocity
Figure 12 Neighbourhood obtained using 120572-cuts
measurements This angular spread has now been definedin terms of 120590 which is the width of the GMF When 120590 =0 the Gaussian Fuzzy Circle reduces to the conventionalcrisp circle The centre of the fuzzy circle is also fuzzyand the radius is a linear combination of fuzzy numbersAlso we have demonstrated geometrical interpretation of theGQTFs and the representation of a fuzzy circle with 119899 =25GMFsThe position of a point on the fuzzy circle has beenexplained Trigonometrical identities Pythagorean identitiesand laws for obtaining solutions to triangles (ie law ofsines law of cosines and law of tangents) have been derivedThe GMFs on a fuzzy circle and Taylorrsquos series expansionshave been verified The relationship between qualitative andquantitative trigonometric states is very difficult to describehowever Gaussian fuzzy qualitative trigonometry helps indescribing their relationship In this paper we have success-fully described the intersection of fuzzy circleswhen the circleis divided into either equal or unequal numbers of partitionsand a study of circular triangles has been given The resultson circular triangles have also been verified This researcharticle gives a theoretical interpretation of applying R-PSOinside a fuzzy circle The R-PSO with fuzzy circle of radius 120572(developed using120572-cuts) reduced the premature convergenceof the standard PSO algorithm By fixing various levels of120572 global best position of the particles can be obtainedFurthermore the development of fuzzy circles with partitionsprovides a sharper boundary when compared to the existingideas of fuzzy circles and fuzzy qualitative circles
71 Future Direction The authors intend to implement thisidea in designing a navigation stick using the concept of radarWe propose to utilize this concept in designing navigationsystems for people with special needs Further this researchbeing an extension to fuzzy qualitative trigonometry will beimplemented in extensive research towards robot kinematicsand human movement analysis
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank Editage (httpswwweditagecom) for English language editing andMr MohamedE for his timely help in developing the R-PSO for fuzzy circlealgorithm using Matlab
References
[1] L A Zadeh ldquoFuzzy setsrdquo Information and Computation vol 8pp 338ndash353 1965
[2] J J Buckley and E Eslami An Introduction to Fuzzy Logicand Fuzzy Sets Physica-Verlag Heidelberg NewYork NY USA2002
[3] D A Ress Development of Fuzzy Trigonometric Functionsto support design and manufacturing [PhD Thesis] NorthCarolina University North Carolina NC USA 1999
[4] H Liu G M Coghill and D P Barnes ldquoFuzzy qualitativetrigonometryrdquo International Journal of Approximate Reasoningvol 51 pp 371ndash388 2009
[5] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIrdquo Fuzzy Sets and Systems vol 209 pp 66ndash83 2012
[6] Y Shi and R Eberhart ldquoFuzzy Adaptive Particle SwarmOptimizationrdquo in Proceedings of the Congress on EvolutionaryComputation pp 101ndash106 2001
[7] W Pang K Wang C Zhou and L Dong ldquoFuzzy discreteparticle swarm optimization for solving traveling salesmanproblemrdquo in Proceedings of the 4th International Conference onComputer and Information Technology (CIT rsquo04) pp 796ndash8002004
[8] A M Abdelbar S Abdelshahid and D C Wunsch ldquoGaussianversus Cauchy membership functions in fuzzy PSOrdquo in Pro-ceedings of the 2007 International Joint Conference on NeuralNetworks IJCNN rsquo07 August 2007
[9] M Anantathanavit and M-A Munlin ldquoRadius particle swarmoptimizationrdquo in Proceedings of the 17th International ComputerScience and Engineering Conference ICSEC rsquo13 pp 126ndash130September 2013
[10] DGhosh andDChakraborty ldquoAnalytical fuzzy plane geometryIIIrdquo Fuzzy Sets and Systems vol 283 pp 83ndash107 2016
[11] A Kaufmann and M M Gupta Introduction to Fuzzy Arith-metic Theory and Applications Van Nostrand Reinhold NewYork NY USA 1985
Computer Games Technology
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
Advances in
FuzzySystems
Hindawiwwwhindawicom
Volume 2018
International Journal of
ReconfigurableComputing
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
thinspArtificial Intelligence
Hindawiwwwhindawicom Volumethinsp2018
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawiwwwhindawicom Volume 2018
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Computational Intelligence and Neuroscience
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018
Human-ComputerInteraction
Advances in
Hindawiwwwhindawicom Volume 2018
Scientic Programming
Submit your manuscripts atwwwhindawicom

Computer Games Technology
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
Advances in
FuzzySystems
Hindawiwwwhindawicom
Volume 2018
International Journal of
ReconfigurableComputing
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Applied Computational Intelligence and Soft Computing
thinspAdvancesthinspinthinsp
thinspArtificial Intelligence
Hindawiwwwhindawicom Volumethinsp2018
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Journal of
Computer Networks and Communications
Hindawiwwwhindawicom Volume 2018
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
International Journal of
Biomedical Imaging
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Computational Intelligence and Neuroscience
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018
Human-ComputerInteraction
Advances in
Hindawiwwwhindawicom Volume 2018
Scientic Programming
Submit your manuscripts atwwwhindawicom