Research on Planar Double Compound Pendulum Based on RK-8 ...
10
Journal on Big Data DOI:10.32604/jbd.2021.015208 This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Article Research on Planar Double Compound Pendulum Based on RK-8 Algorithm Zilu Meng 1 , Zhehan Hu 1 , Zhenzhen Ai 1 , Yanan Zhang 2,* and Kunling Shan 2 1 Engineering Training Center, Nanjing University of Information Science & Technology, Nanjing, 210044, China 2 School of Atmospheric Sciences, Nanjing University of Information Science and Technology, Nanjing, 210044, China * Corresponding Author: Yanan Zhang. Email: [email protected] Received: 15 September 2020; Accepted: 20 January 2021 Abstract: Establishing the Lagrangian equation of double complex pendulum system and obtaining the dynamic differential equation, we can analyze the motion law of double compound pendulum with application of the numerical simulation of RK-8 algorithm. When the double compound pendulum swings at a small angle, the Lagrangian equation can be simplified and the normal solution of the system can be solved. And we can walk further on the relationship between normal frequency and swing frequency of double pendulum. When the external force of normal frequency is applied to the double compound pendulum, the forced vibration of the double compound pendulum will show the characteristics of beats. Keywords: Lagrangian equation; RK-8; forced vibration; beats of planar double compound pendulum 1 Introduction The motion of simple pendulum with small angle is the model of simple harmonic motion in “College Physics”. When the air resistance is ignored, the trajectory of the pendulum ball is harmonic vibration. Under the action of gravity, a rigid body that can swing around a fixed horizontal axis is called a compound pendulum. The research of compound pendulum is closer to daily life. Planar double compound pendulum is the basic model of many phenomena in real life. The research on it involves kinematics, dynamics, vibration theory and so on. Although the dynamic differential equation can be listed according to the force analysis, the equation is more complex and has no explicit solution. With the rise of numerical calculation methods, complex systems with multi degrees of freedom, highly nonlinear and multi parameter coupling, such as double pendulum, can be solved by different algorithms, and then their motion laws can be studied [1,2]. In this paper, based on Lagrangian method, the dynamic model is established with the kinetic energy and potential energy of the system, and the Lagrangian equations are obtained. The swing pattern of the double pendulum is solved by using RK-8 algorithm. Nevertheless, numerical simulation of the swing of the double pendulum cannot get the motion law of the double pendulum. Given the constraint conditions, the Lagrangian equations are simplified and the normal coordinates of the system are obtained. The oscillation of the double pendulum is approximately periodic, and the normal coordinate is simple harmonic vibration. Finally, the external force with periodic variation of normal frequency is loaded on the double pendulum system, which makes the vibration of upper and lower compound pendulum have “beats” characteristics, but only the normal coordinate close to the frequency of driving force can continuously receive the energy exerted by driving force. 2 Planar Double Compound Pendulum System A planar double compound pendulum is composed of a compound pendulum connected by its head and tail. As shown in Fig. 1, we can establish a plane rectangular coordinate system whose coordinate origin is the suspension point . The angle between the upper complex pendulum and the y-axis is , and the
Transcript of Research on Planar Double Compound Pendulum Based on RK-8 ...

Journal on Big Data DOI:10.32604/jbd.2021.015208
This work is licensed under a Creative Commons Attribution 4.0 International License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Article
Research on Planar Double Compound Pendulum Based on RK-8 Algorithm
Zilu Meng1, Zhehan Hu1, Zhenzhen Ai1, Yanan Zhang2,* and Kunling Shan2
1Engineering Training Center, Nanjing University of Information Science & Technology, Nanjing, 210044, China 2School of Atmospheric Sciences, Nanjing University of Information Science and Technology, Nanjing, 210044, China
*Corresponding Author: Yanan Zhang. Email: [email protected] Received: 15 September 2020; Accepted: 20 January 2021
Abstract: Establishing the Lagrangian equation of double complex pendulum system and obtaining the dynamic differential equation, we can analyze the motion law of double compound pendulum with application of the numerical simulation of RK-8 algorithm. When the double compound pendulum swings at a small angle, the Lagrangian equation can be simplified and the normal solution of the system can be solved. And we can walk further on the relationship between normal frequency and swing frequency of double pendulum. When the external force of normal frequency is applied to the double compound pendulum, the forced vibration of the double compound pendulum will show the characteristics of beats.
Keywords: Lagrangian equation; RK-8; forced vibration; beats of planar double compound pendulum
1 Introduction The motion of simple pendulum with small angle is the model of simple harmonic motion in “College
Physics”. When the air resistance is ignored, the trajectory of the pendulum ball is harmonic vibration. Under the action of gravity, a rigid body that can swing around a fixed horizontal axis is called a compound pendulum. The research of compound pendulum is closer to daily life. Planar double compound pendulum is the basic model of many phenomena in real life. The research on it involves kinematics, dynamics, vibration theory and so on. Although the dynamic differential equation can be listed according to the force analysis, the equation is more complex and has no explicit solution. With the rise of numerical calculation methods, complex systems with multi degrees of freedom, highly nonlinear and multi parameter coupling, such as double pendulum, can be solved by different algorithms, and then their motion laws can be studied [1,2]. In this paper, based on Lagrangian method, the dynamic model is established with the kinetic energy and potential energy of the system, and the Lagrangian equations are obtained. The swing pattern of the double pendulum is solved by using RK-8 algorithm. Nevertheless, numerical simulation of the swing of the double pendulum cannot get the motion law of the double pendulum. Given the constraint conditions, the Lagrangian equations are simplified and the normal coordinates of the system are obtained. The oscillation of the double pendulum is approximately periodic, and the normal coordinate is simple harmonic vibration. Finally, the external force with periodic variation of normal frequency is loaded on the double pendulum system, which makes the vibration of upper and lower compound pendulum have “beats” characteristics, but only the normal coordinate close to the frequency of driving force can continuously receive the energy exerted by driving force.
2 Planar Double Compound Pendulum System A planar double compound pendulum is composed of a compound pendulum connected by its head
and tail. As shown in Fig. 1, we can establish a plane rectangular coordinate system whose coordinate origin is the suspension point 𝑂𝑂. The angle between the upper complex pendulum and the y-axis is 𝜃𝜃, and the

12 JBD, 2021, vol. 3, no. 1
angle between the lower complex pendulum and the y-axis is 𝜑𝜑. The corresponding physical quantities of the system are shown in Tab. 1.
Figure 1: Double compound pendulum of plane
Table 2: Symbol description of planar double compound pendulum system Symbol Meaning 𝑚𝑚1 Mass of uniform fine rod 1 𝑚𝑚2 Mass of uniform fine rod 2 𝑙𝑙1 Length of uniform fine rod 1 𝑙𝑙2 Length of uniform fine rod 2 𝜃𝜃 Angle between uniform fine rod 1 and positive direction of y-axis 𝜑𝜑 Angle between uniform fine rod 2 and positive direction of y-axis 𝑇𝑇1 Kinetic energy of uniform fine rod 1 𝑇𝑇2 Kinetic energy of uniform fine rod 2 𝑉𝑉1 Potential energy of uniform fine rod 1 𝑉𝑉2 Potential energy of uniform fine rod 2
In this paper, the plane motion of double compound pendulum is studied. Therefore, the motion law of double compound pendulum can be determined by two degrees of freedom. If the position of point 𝑂𝑂 is the zero point of potential energy, ignoring the air resistance and the energy dissipation. Then with consideration of the rotation of the upper complex pendulum, the kinetic energy and potential energy are
𝑇𝑇1 = 𝑚𝑚1𝑙𝑙12�̇�𝜃2
6 (1-1)
𝑉𝑉1 = − 𝑙𝑙1𝑚𝑚1𝑔𝑔 𝑐𝑐𝑐𝑐𝑐𝑐𝜃𝜃2
(1-2)
The center of mass coordinates of the lower complex pendulum(𝑥𝑥2,𝑦𝑦2) = �𝑙𝑙1sin𝜃𝜃 + 𝑙𝑙2sin𝜑𝜑2
, 𝑙𝑙1cos𝜃𝜃 +𝑙𝑙2cos𝜑𝜑2
�, Its motion can be regarded as the combination of translation and rotation. If the coordinate origin 𝑂𝑂 is set as zero potential energy point, then the potential energy of the lower complex pendulum is
𝑉𝑉2 = −𝑙𝑙1𝑚𝑚2𝑔𝑔 𝑐𝑐𝑐𝑐𝑐𝑐 𝜃𝜃 −12𝑙𝑙2𝑚𝑚2𝑔𝑔 𝑐𝑐𝑐𝑐𝑐𝑐 𝜑𝜑 (2-1)
The kinetic energy of the lower complex pendulum is equal to the sum of translational kinetic energy and rotational kinetic energy.
𝑇𝑇2 = 𝑚𝑚22
(�̇�𝑥22 + �̇�𝑦22) + 𝑚𝑚2𝑙𝑙22�̇�𝜑2
24 (2-2)
After obtaining the kinetic energy and potential energy of the upper and lower complex pendulum, the Lagrangian function of the planar double complex pendulum system can be obtained. 𝐿𝐿 = 𝑇𝑇1 + 𝑇𝑇2 − 𝑉𝑉1 − 𝑉𝑉2 = (𝑚𝑚1𝑙𝑙12
6+ 𝑚𝑚2𝑙𝑙12
2)�̇�𝜃2 + 𝑚𝑚2𝑙𝑙22�̇�𝜑2
6+ 𝑚𝑚2𝑙𝑙1𝑙𝑙2�̇�𝜃�̇�𝜑
2𝑐𝑐𝑐𝑐𝑐𝑐(𝜃𝜃 − 𝜑𝜑) + 𝑙𝑙1(𝑚𝑚1+2𝑚𝑚2)𝑔𝑔 𝑐𝑐𝑐𝑐𝑐𝑐𝜃𝜃
2+ 𝑙𝑙2𝑚𝑚2𝑔𝑔𝑐𝑐𝑐𝑐𝑐𝑐𝜑𝜑
2 (3)
The Lagrangian equations are then listed.

JBD, 2021, vol.3, no.1 13
�𝑑𝑑𝑑𝑑𝑑𝑑
(𝜕𝜕𝜕𝜕𝜕𝜕�̇�𝜃
) − 𝜕𝜕𝜕𝜕𝜕𝜕𝜃𝜃
= 0𝑑𝑑𝑑𝑑𝑑𝑑
(𝜕𝜕𝜕𝜕𝜕𝜕�̇�𝜑
) − 𝜕𝜕𝜕𝜕𝜕𝜕𝜑𝜑
= 0 (4)
The dynamic differential equation of the planar double complex pendulum can be obtained.
�(𝑚𝑚1𝑙𝑙12
3+ 𝑚𝑚2𝑙𝑙1
2)�̈�𝜃 + 𝑚𝑚2𝑙𝑙1𝑙𝑙2�̇�𝜑2
𝑐𝑐𝑐𝑐𝑐𝑐( 𝜃𝜃 − 𝜑𝜑) + 𝑙𝑙1(𝑚𝑚1+2𝑚𝑚2)𝑔𝑔𝑐𝑐𝑠𝑠𝑠𝑠 𝜃𝜃2
+ 𝑚𝑚2𝑙𝑙1𝑙𝑙2�̇�𝜑2
2𝑐𝑐𝑠𝑠𝑠𝑠(𝜃𝜃 − 𝜑𝜑) = 0
𝑚𝑚2𝑙𝑙22�̈�𝜑3
+ 𝑚𝑚2𝑙𝑙1𝑙𝑙2�̈�𝜃 𝑐𝑐𝑐𝑐𝑐𝑐(𝜃𝜃−𝜑𝜑)2
+ 𝑙𝑙2𝑚𝑚2𝑔𝑔𝑐𝑐𝑠𝑠𝑠𝑠 𝜑𝜑2
− 𝑚𝑚2𝑙𝑙1𝑙𝑙2�̇�𝜃2
2𝑐𝑐𝑠𝑠𝑠𝑠(𝜃𝜃 − 𝜑𝜑) = 0
(5)
3 Numerical Simulation Results and Analysis of double Compound Pendulum In order to obtain the high-precision solution of Eq. (5), we used the eighth-order Runge Kutta (RK-
8) method to solve the Eq. (3). In the process of solving, because of the uncertainty between the second derivative and the original function, the second derivative and the original function can be regarded as independent functions in the form of solution. To facilitate the solution of linear equations, the following matrices are written:
�(𝑚𝑚1𝑙𝑙12
3+𝑚𝑚2𝑙𝑙1
2)𝑚𝑚2𝑙𝑙1𝑙𝑙2 𝑐𝑐𝑐𝑐𝑐𝑐(𝜃𝜃−𝜑𝜑)
2
𝑚𝑚2𝑙𝑙1𝑙𝑙22
𝑐𝑐𝑐𝑐𝑐𝑐(𝜃𝜃 − 𝜑𝜑)
𝑚𝑚2𝑙𝑙22
3
� ��̈�𝜃�̈�𝜑� = �− 𝑙𝑙1(𝑚𝑚1+2𝑚𝑚2)𝑔𝑔𝑐𝑐𝑠𝑠𝑠𝑠 𝜃𝜃
2− 𝑚𝑚2𝑙𝑙1𝑙𝑙2�̇�𝜑2
2𝑐𝑐𝑠𝑠𝑠𝑠( 𝜃𝜃 − 𝜑𝜑)
− 𝑙𝑙2𝑚𝑚2𝑔𝑔𝑐𝑐𝑠𝑠𝑠𝑠𝜑𝜑2
+ 𝑚𝑚2𝑙𝑙1𝑙𝑙2�̇�𝜃2
2𝑐𝑐𝑠𝑠𝑠𝑠(𝜃𝜃 − 𝜑𝜑)
� (6)
Because there is a certain error between the simulated value and the real value of RK-8 algorithm, the algorithm error is tested by the conservation of mechanical energy. The mechanical energy error ratio is now defined as 𝜂𝜂.
𝜂𝜂 = �(𝑉𝑉1+𝑉𝑉2+𝑇𝑇1+𝑇𝑇2)|𝑡𝑡=0−(𝑉𝑉1+𝑉𝑉2+𝑇𝑇1+𝑇𝑇2)(𝑉𝑉1+𝑉𝑉2+𝑇𝑇1+𝑇𝑇2)|𝑡𝑡=0
� (7)
The accuracy of RK-8 algorithm is tested by solving error ratio under given initial conditions. Numerical simulation was carried out with 𝜃𝜃0 = 𝜋𝜋/2 𝜃𝜃0 = 𝜋𝜋/6 as initial conditions, and the results are shown in Fig. 2 and Fig. 3. Fig. 2(b) and Fig. 3(b) show that the error of RK-8 algorithm is very small, which is not more than 10−8. In Fig. 2(a), when𝜃𝜃0 = 𝜋𝜋/2, the angle change of the upper compound pendulum seems to have a certain regularity, but the swing angle of the lower compound pendulum changes more at first, and the change of time at any time shows a little regularity in the later stage of swing. When the initial conditions change as 𝜃𝜃0 = 𝜋𝜋/6, as shown in Fig. 3(a), the swing angles of the upper and lower compound pendulums almost change regularly.
(a) (b)
Figure 2: (a) Change of 𝜃𝜃,𝜑𝜑 with t and (b) Change of error 𝜂𝜂 with t

14 JBD, 2021, vol. 3, no. 1
(a) (b)
Figure 3: (a) Change of 𝜃𝜃,𝜑𝜑 with t and (b) Change of error 𝜂𝜂 with t
4 Numerical Simulation Results and Analysis of Small Angle Vibration of Double Compound Pendulum It can be seen from Fig. 2(a) and Fig. 3(a) that, after a period of oscillation, the angle of the double
compound pendulum is approximately regular, but it is not a simple harmonic vibration. In order to study its oscillation law, we had better simplify the Lagrangian function which describes the plane double complex pendulum with the second order function ignore. 𝐿𝐿 = 𝑇𝑇1 + 𝑇𝑇2 − 𝑉𝑉1 − 𝑉𝑉2 = (𝑚𝑚1𝑙𝑙12
6+ 𝑚𝑚2𝑙𝑙12
2)�̇�𝜃2 + 𝑚𝑚2𝑙𝑙22�̇�𝜑2
6+ 𝑚𝑚2𝑙𝑙1𝑙𝑙2�̇�𝜃�̇�𝜑
2+ 𝑙𝑙1(𝑚𝑚1+2𝑚𝑚2)𝑔𝑔(2−𝜃𝜃2)
2+ 𝑙𝑙2𝑚𝑚2𝑔𝑔(2−𝜑𝜑2)
2 (8)
The expression of Lagrangian function is simplified as follows:
𝐴𝐴 = 𝑚𝑚1𝑙𝑙12
6+ 𝑚𝑚2𝑙𝑙12
2,𝐵𝐵 = 𝑚𝑚2𝑙𝑙22
6,𝐶𝐶 = 𝑚𝑚2𝑙𝑙1𝑙𝑙2
2,𝐸𝐸 = 𝑙𝑙1(𝑚𝑚1+2𝑚𝑚2)𝑔𝑔
4,𝐹𝐹 = 𝑙𝑙2𝑚𝑚2𝑔𝑔
4 (9)
Order 𝑞𝑞1 = √𝐸𝐸𝜃𝜃, 𝑞𝑞2 = √𝐹𝐹𝜑𝜑, the potential energy of equilibrium type is zero potential energy, and by eliminating the constant, and the Lagrangian function of double pendulum system is simplified
𝐿𝐿 = 𝐴𝐴𝐸𝐸�̇�𝑞12 + 𝐵𝐵
𝐸𝐸�̇�𝑞22 + 𝐶𝐶
√𝐸𝐸𝐸𝐸�̇�𝑞1�̇�𝑞2 − 𝑞𝑞12 − 𝑞𝑞22 (10)
The coefficient matrix 𝑀𝑀 of kinetic energy 𝑇𝑇 and the coefficient matrix 𝑉𝑉 of potential energy are obtained.
𝑀𝑀 = � 𝐴𝐴
𝐸𝐸𝐶𝐶
2√𝐸𝐸𝐸𝐸
𝐶𝐶
2√𝐸𝐸𝐸𝐸
𝐵𝐵𝐸𝐸
� , 𝑉𝑉 = �10 01� (11)
The eigenvalue equation is
𝑑𝑑𝑑𝑑𝑑𝑑(𝑀𝑀 − 𝜆𝜆𝑉𝑉) = �𝐴𝐴𝐸𝐸− 𝜆𝜆𝐶𝐶
2√𝐸𝐸𝐸𝐸
𝐶𝐶
2√𝐸𝐸𝐸𝐸𝐵𝐵𝐸𝐸− 𝜆𝜆
� = 0 (12)
The eigenvalue of the obtained matrix is
𝜆𝜆1,2 =𝐴𝐴𝐸𝐸+
𝐵𝐵𝐹𝐹±�𝐶𝐶
2𝐸𝐸𝐹𝐹+(𝐴𝐴𝐸𝐸−
𝐵𝐵𝐸𝐸)2
2 (13)
The above solution satisfies the condition of small vibration, that is, the displacement and velocity of double compound pendulum are small, so the vibration energy is also small vibration. It is a basic method

JBD, 2021, vol.3, no.1 15
to study the small vibration characteristics of the system by linearizing the Lagrangian function near the equilibrium point of the system [4,5]. Two eigenfrequencies of vibration can be solved by Eq. (13).
𝜔𝜔1 = 1�𝜆𝜆1
, 𝜔𝜔2 = 1�𝜆𝜆2
(14)
The analytic solution of coordinates 𝜃𝜃 and 𝜑𝜑 is
�𝜃𝜃 = 1
√𝐸𝐸𝑞𝑞1 = 1
√𝐸𝐸[𝐶𝐶1𝐴𝐴11 𝑐𝑐𝑐𝑐𝑐𝑐(𝜔𝜔1𝑑𝑑 + 𝜙𝜙1) + 𝐶𝐶2𝐴𝐴12 𝑐𝑐𝑐𝑐𝑐𝑐(𝜔𝜔2 + 𝜙𝜙2)]
𝜑𝜑 = 1√𝐸𝐸𝑞𝑞2 = 1
√𝐸𝐸[𝐶𝐶1𝐴𝐴21 𝑐𝑐𝑐𝑐𝑐𝑐(𝜔𝜔1𝑑𝑑 + 𝜙𝜙1) + 𝐶𝐶2𝐴𝐴22 𝑐𝑐𝑐𝑐𝑐𝑐(𝜔𝜔2 + 𝜙𝜙2)]
(15)
Among them, 𝐶𝐶1,𝐶𝐶2,𝜙𝜙1,𝜙𝜙2 is related to the initial value of motion. By further simplification and substitution, we can get the analytical solution Q of two normal coordinates of vibration 𝑞𝑞1′,𝑞𝑞2′ .
𝑞𝑞1′ = 𝐴𝐴21𝐴𝐴11
√𝐸𝐸√𝐸𝐸
= (𝜆𝜆1 −𝐴𝐴𝐸𝐸
) 2𝐸𝐸𝐶𝐶𝜃𝜃 − 𝜑𝜑 = 𝐶𝐶2′ 𝑐𝑐𝑐𝑐𝑐𝑐(𝜔𝜔1 + 𝜙𝜙1) (16-1)
𝑞𝑞2′ = 𝐴𝐴22𝐴𝐴12
√𝐸𝐸√𝐸𝐸
= (𝜆𝜆2 −𝐴𝐴𝐸𝐸
) 2𝐸𝐸𝐶𝐶𝜃𝜃 − 𝜑𝜑 = 𝐶𝐶1′ 𝑐𝑐𝑐𝑐𝑐𝑐(𝜔𝜔2𝑑𝑑 + 𝜙𝜙2) (16-2)
The above formula gives the relationship between 𝜃𝜃, 𝜑𝜑 obtained from the solution of Lagrangian equations and the two functions 𝑞𝑞1′ , 𝑞𝑞2′ describing the energy of the system. 𝜃𝜃, 𝜑𝜑 can be solved separately according to the kinetic energy and potential energy of the upper and lower complex pendulums under given initial conditions. Fig. 4 shows 𝜃𝜃, 𝜑𝜑 vibration images obtained under given initial conditions. It can be seen that the swing of the upper and lower compound pendulum has certain regularity, but it does not satisfy the simple harmonic vibration. Substituting 𝜃𝜃, 𝜑𝜑 into Eq. (16), 𝑞𝑞1′ , 𝑞𝑞2′ are obtained, as shown in Fig. 5. It can be seen from the figure that 𝑞𝑞1′ , 𝑞𝑞2′ are periodic functions. In fact, 𝑞𝑞1′ , 𝑞𝑞2′ are normal coordinates, while 𝜔𝜔1′ , 𝜔𝜔2
′ are normal frequencies [6]. If the plane double compound pendulum system only swings at one frequency and the vibration of other frequencies is not excited, then the coordinate reflecting the vibration mode is the normal coordinate. The corresponding vibration mode becomes normal vibration. Any vibration state of the system is the linear superposition of all kinds of normal vibration. The vibration of two normal frequencies is shown in Fig. 5. The vibration shown in Fig. 4 is the linear superposition of the normal vibration of Fig. 5. The period of 𝑞𝑞1′ , 𝑞𝑞2′ obtained by solving 𝜃𝜃, 𝜑𝜑 by using the motion equation is also basically consistent with the normal period of 𝑞𝑞1′ , 𝑞𝑞2′ images. The results are shown in Tab. 2.
Figure 4: Vibration images of 𝜃𝜃, 𝜑𝜑

16 JBD, 2021, vol. 3, no. 1
Figure 5: Vibration images of 𝑞𝑞1′and 𝑞𝑞′2
Table 2: Comparison of kinematics equation and Lagrangian equation
Initial condition 𝑚𝑚1 = 1 𝑘𝑘𝑔𝑔,𝑚𝑚2 = 1 𝑘𝑘𝑔𝑔, 𝑙𝑙1 = 1 𝑚𝑚, 𝑙𝑙2 = 1 𝑚𝑚, 𝑔𝑔 = 9 𝑚𝑚 ⋅ 𝑐𝑐−2,𝜃𝜃0 = 𝜋𝜋/360,𝜑𝜑0 = 0
Solution period of kinematics equation 𝑞𝑞1′ , 𝑞𝑞2′ Image solving period relative error 𝑇𝑇1 = 0.85 𝑐𝑐 𝑇𝑇1 = 0.874 𝑐𝑐 2.8% 𝑇𝑇2 = 2.34 𝑐𝑐 𝑇𝑇2 = 2.346 𝑐𝑐 0.2%
In this paper, the motion law of double compound pendulum in small angle vibration is discussed, which can be solved by Lagrangian equation. The results obtained are the same as those obtained by Newton's law of motion, which provides a new idea for the study of complex motion.
5 Analysis of Low Energy Vibration of Double Compound Pendulum under External Force It is concluded that the upper and lower compound pendulums tend to vibrate regularly after a period
of time. When the angle is small, the vibration of the upper and lower pendulum is linear superposition of normal vibration. If the periodic external force is applied to the double compound pendulum, and the frequency of the external force is equal to the normal frequency, can the double compound pendulum make simple harmonic vibration?
First, take a simple complex pendulum as an example, as shown in Fig. 6, when 𝜃𝜃 is very small at low energy, 𝜃𝜃the vibration differential equation of the complex pendulum is 𝑑𝑑2𝜃𝜃𝑑𝑑𝑑𝑑2
+ 32𝑔𝑔𝑙𝑙𝜃𝜃 = 0 (17)
At this time, the compound pendulum vibrates harmoniously and its angular frequency is𝜔𝜔0 =�3𝑔𝑔/2𝑙𝑙. The periodic driving force 𝑓𝑓 𝑐𝑐𝑐𝑐𝑐𝑐𝜔𝜔0 𝑑𝑑 is loaded on the complex pendulum, and the rk-8 algorithm is used for numerical simulation, and the vibration image of the complex pendulum is obtained as shown in Fig. 6.
The reason is that only when theta is small can the simple harmonic vibration be satisfied. When the periodic external force is applied to the compound pendulum, the amplitude increases gradually [7,8]. At this time, the 𝑐𝑐𝑠𝑠𝑠𝑠 𝜃𝜃is no longer approximately equal to 𝜃𝜃, which means that the intrinsic frequency of the complex pendulum is no longer equal to �3𝑔𝑔/2𝑙𝑙, but will change with the change of the amplitude, which is always different from the fixed frequency of the external driving force.
JBD, 2021, vol.3, no.1 17
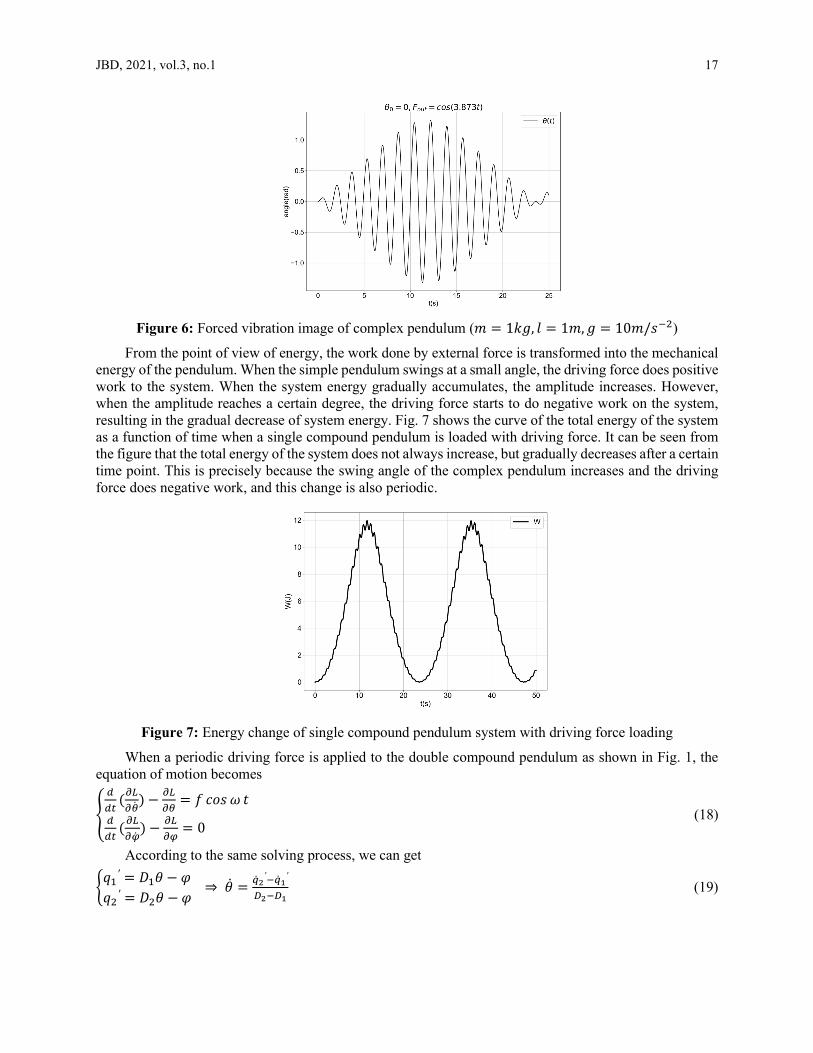
Figure 6: Forced vibration image of complex pendulum (𝑚𝑚 = 1𝑘𝑘𝑔𝑔, 𝑙𝑙 = 1𝑚𝑚,𝑔𝑔 = 10𝑚𝑚/𝑐𝑐−2)
From the point of view of energy, the work done by external force is transformed into the mechanical energy of the pendulum. When the simple pendulum swings at a small angle, the driving force does positive work to the system. When the system energy gradually accumulates, the amplitude increases. However, when the amplitude reaches a certain degree, the driving force starts to do negative work on the system, resulting in the gradual decrease of system energy. Fig. 7 shows the curve of the total energy of the system as a function of time when a single compound pendulum is loaded with driving force. It can be seen from the figure that the total energy of the system does not always increase, but gradually decreases after a certain time point. This is precisely because the swing angle of the complex pendulum increases and the driving force does negative work, and this change is also periodic.
Figure 7: Energy change of single compound pendulum system with driving force loading
When a periodic driving force is applied to the double compound pendulum as shown in Fig. 1, the equation of motion becomes
�𝑑𝑑𝑑𝑑𝑑𝑑
(𝜕𝜕𝜕𝜕𝜕𝜕�̇�𝜃
) − 𝜕𝜕𝜕𝜕𝜕𝜕𝜃𝜃
= 𝑓𝑓 𝑐𝑐𝑐𝑐𝑐𝑐 𝜔𝜔 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑
(𝜕𝜕𝜕𝜕𝜕𝜕�̇�𝜑
) − 𝜕𝜕𝜕𝜕𝜕𝜕𝜑𝜑
= 0 (18)
According to the same solving process, we can get
�𝑞𝑞1′ = 𝐷𝐷1𝜃𝜃 − 𝜑𝜑
𝑞𝑞2′ = 𝐷𝐷2𝜃𝜃 − 𝜑𝜑 ⇒ �̇�𝜃 = �̇�𝑞2
′−�̇�𝑞1′
𝐷𝐷2−𝐷𝐷1 (19)

18 JBD, 2021, vol. 3, no. 1
The initial conditions (𝑚𝑚1 = 1𝑘𝑘𝑔𝑔,𝑚𝑚2 = 1𝑘𝑘𝑔𝑔, 𝑙𝑙1 = 1𝑚𝑚, 𝑙𝑙2 = 1𝑚𝑚,𝑔𝑔 = 9.8𝑚𝑚 ⋅ 𝑐𝑐−2,𝜃𝜃0 = 0,𝜑𝜑0 = 0)are substituted and simulated by rk-8 algorithm. The dynamic differential equations are simplified to matrix equations:
�(𝑚𝑚1𝑙𝑙12
3+ 𝑚𝑚2𝑙𝑙1
2)𝑚𝑚2𝑙𝑙1𝑙𝑙2 𝑐𝑐𝑐𝑐𝑐𝑐(𝜃𝜃−𝜑𝜑)
2
𝑚𝑚2𝑙𝑙1𝑙𝑙2
2𝑐𝑐𝑐𝑐𝑐𝑐(𝜃𝜃 − 𝜑𝜑)
𝑚𝑚2𝑙𝑙22
3
� ��̈�𝜃�̈�𝜑� = �− 𝑙𝑙1(𝑚𝑚1+2𝑚𝑚2)𝑔𝑔 𝑐𝑐𝑠𝑠𝑠𝑠 𝜃𝜃
2− 𝑚𝑚2𝑙𝑙1𝑙𝑙2�̇�𝜑2
2𝑐𝑐𝑠𝑠𝑠𝑠( 𝜃𝜃 − 𝜑𝜑) + 𝑓𝑓 𝑐𝑐𝑐𝑐𝑐𝑐 𝜔𝜔 𝑑𝑑
− 𝑙𝑙2𝑚𝑚2𝑔𝑔 𝑐𝑐𝑠𝑠𝑠𝑠𝜑𝜑2
+ 𝑚𝑚2𝑙𝑙1𝑙𝑙2�̇�𝜃2
2𝑐𝑐𝑠𝑠𝑠𝑠(𝜃𝜃 − 𝜑𝜑)
� (20)
The eigenvalues are as follows: 𝜆𝜆1 = 0.139359 , 𝜆𝜆2=0.019371
The intrinsic frequencies are as follows: 𝜔𝜔1 = 7.1850 , 𝜔𝜔2=2.6787
If the frequency of the driving force is set to 1 and 2 respectively, then the forced vibration of the system is shown in Fig. 8.
(a) (b)
(c) (d)
Figure 8: (a) Forced vibration of the system when the driving force of ω1is loaded on the upper swing, (b) Forced vibration of the system when the driving force of 𝜔𝜔1is loaded on lower swing, (c) Forced vibration of the system when the driving force of 𝜔𝜔2is loaded on the upper swing and (d) Forced vibration of the system when the driving force of 𝜔𝜔2is loaded on the lower swing
It can be seen from the figure that the forced vibration of double compound pendulum is similar to that of single compound pendulum. No matter what driving force of intrinsic frequency is applied to the upper and lower compound pendulum, the oscillation of double pendulum will have the characteristic of “beat”, that is, the amplitude of pendulum will change periodically. At the same time, the vibration of the

JBD, 2021, vol.3, no.1 19
upper and lower compound pendulums has the characteristics of “beat”, but does the normal vibration reflecting the arbitrary swing state of the double compound pendulum also have the same characteristics? Fig. 9 shows the vibration of two normal coordinates and the energy change in the two coordinate systems with 𝜔𝜔1 as the driving force frequency.
(a) (b)
Figure 9: (a) Vibration image of normal coordinate under the action of driving force of 𝜔𝜔1 and (b) The energy change of normal coordinate when the frequency is the driving force of 𝜔𝜔1
Different from the characteristics of the upper and lower pendulums, the vibration of the normal coordinate is only "beat" vibration which is similar to the frequency of the driving force, while the other vibration almost does not occur. The energy of the normal coordinate 𝑞𝑞1′ also increases first and then decreases, with periodic changes. The energy of 𝑞𝑞1′ is almost zero. That is to say, when the driving force with normal frequency acts on the double compound pendulum system, the normal coordinate close to the driving force frequency can receive energy, while another normal coordinate with large difference from the driving force frequency will not be able to accumulate energy.
6 Summary The motion law of the complex pendulum is analyzed by using the mechanical method. Under the
condition of small angle, the compound pendulum vibrates simply. Although the mechanical equation can be listed, the analytical solution of the equation cannot be obtained when the pendulum swings at a large angle. Lagrangian function is used to avoid complex force analysis, and Lagrangian equations are obtained. Rk-8 algorithm can be used to simulate and analyze the motion characteristics of double compound pendulum, which provides a new idea for the analysis of complex mechanical process. When the double compound pendulum swings at a small angle, the Lagrangian equations are simplified and the normal coordinates of the system are solved. It can be proved that the normal coordinate is a simple harmonic vibration. Any vibration state of double compound pendulum is linear superposition of normal vibration. When the periodic driving force satisfying the normal frequency is loaded on the double compound pendulum system, the double pendulum shows obvious beat vibration characteristics under the coupling effect of the double compound pendulum. However, only the normal coordinate close to the frequency of the driving force can receive the energy of the driving force and form the vibration with periodic amplitude variation, while other normal coordinates cannot receive the energy of the driving force.
Acknowledgement: We especially thank teacher Yanan Zhang for his guidance on our writing. We also thank the anonymous reviewers for their valuable comments and insightful suggestions.
Funding Statement: NUIST’s curriculum reform project of “integration of specialty and innovation”.
20 JBD, 2021, vol. 3, no. 1
Conflicts of Interest: The authors declare no conflicts of interest.
References [1] Y. Jiang, Numerical Analysis and Computational Method, World Academic Union, 2011. [2] N. X. Yang, K. Zhang, T. Fan, R. Wang and M. Z. Sun, “Error analysis of two kinds of experiments on complex
pendulum characterictics,” Physical Experiment of College, 2017. [3] Y. L. Liu and Y. M. Zhu, “Multi body dynamics of planar double pendulum mechanism based on Lagrange
method,” Mechanical Design and Manufacturing, pp. 75–77, 2009. [4] G. D. Quiroga and P. A. Qsoina-Henao, “Dynamics of damped qscillations: Physical pendulum,” European
Journal of Physics, vol. 38, no. 6, 2017. [5] M. S. Saad, Z. Shayfull, S. M. Nasir and M. Fathullah, “Parameter estimation of damped compound pendulum
differential evolution algorithm,” MATEC Web of Conferences, 2016. [6] F. X. Mei, Analytical Mechanics, Beijing: Beijing University of Technology Press, 2013. [7] M. S. Saad, L. N. H. M. Deri, Z. Shayfull, S. M. Nasir and M. Fathullah, “Parameter estimation of damped
compound pendulum using bat algorith,” MATEC Web of Conferences, 2016. [8] A. Y. Botalov, “Oscillations of physical pendulum with a cavity of elliptic shape filled with viscous liquid,”
Thermophysics and Aeromechanics, vol. 22, pp. 339–344, 2015.