
Research on Multistable Compliant Mechanisms: The State of the Art
5
Proceedings of the 9th International Conference on Frontiers of Design and Manufacturing July 17~19, 2010, Changsha, China Research on Multistable Compliant Mechanisms: The State of the Art Chen G., Gou Y., Yang L. School of Mechatronics, Xidian University, Xi’an 710071, China e-mail:[email protected] Abstract: Compliant multistable mechanisms are a special class of compliant mechanisms which possess multiple stable equilibrium positions within these ranges of motion. Compliant multistable mechanisms can be roughly divided into two categories depending on the number of stable positions: compliant bistable mechanisms and compliant mechanisms with more than two stable positions. In the paper, we first review these two categories separately, and then discuss our current and future work on this topic under the financial support of the National Natural Science Foundation of China. Keywords: Compliant mechanisms, Bistability, Multistability 1 Introduction A multistable mechanism possesses multiple stable equilibrium positions within its range of motion. At these stable equilibrium positions, the mechanism can hold the positions without power input, even a small disturbance occurs. Many applications, such as switches, valves, relays, positioners, and memory cells, may benefit from a multistable mechanism. Some multistable mechanisms achieve their multistability through the use of locking mechanisms, detents, or multiple energy domains (e.g., gravitational and magnetic fields), which are beyond the scope of this review and will not be discussed in this paper. A compliant mechanism, which achieves at least some of its mobility from the deflection of flexible segments rather than from articulated joints only, offers an effective and economical way to achieve multistability because the mechanism's energy storage and motion characteristics are directly related [1] . Therefore, much work has been done on compliant multistable mechanisms in the past decade. (The purpose of this paper is to present readers a general view) Compliant multistable mechanisms can be roughly divided into two categories depending on the number of stable positions: compliant bistable mechanisms and compliant mechanisms with more than two stable positions. In the following, we first introduce these two categories separately, and then present our current work on this topic under the financial support of the National Natural Science Foundation of China. 2 Compliant Bistable Mechanisms Considerable work has been done on design and synthesis of compliant bistable mechanisms. Most compliant bistable mechanism configurations in the literature achieve their bistability through the snap- through behavior of buckled beams. In such mechanisms, the flexible segments undergo combined compression and bending loads during their motion from one stable position to the other. Fig. 1 illustrates a partially compliant bistable mechanism design (a partially compliant mechanism utilizes one or more traditional movable joints along with compliant segments to achieve its motion) while Figs. 2-3 show two fully compliant bistable mechanism designs (a fully compliant mechanism achieves all of its mobility from the deflections of flexible segments and can usually be fabricated as one-piece structure). All these designs are based on buckling behavior of flexible beams. The design shown in Fig. 2 employs a centrally-clamped parallel-beam structure to prevent higher buckling modes for the flexible beams [3] . In the design shown in Fig. 3, a rigid part is included in each of the flexible segments, which greatly increases the input force (the maximum force required to switch the mechanism from its first stable position to the second stable position) and the contact force (the maximum force required to switch the mechanism from its second stable position to the first stable position) of the bistable mechanism. When designing a micro bistable device, the fully compliant designs are preferable because of their inherent reduced clearances and improved wear characteristics. On the other hand, if large motion range between the two stable positions is required, the partially compliant design is a good choice. Figure 1 A partially compliant bistable mechanism employing elastica buckling beams [2] Figure 2 A fully compliant bistable mechanisms utilizing curved buckling beams [3]
Transcript of Research on Multistable Compliant Mechanisms: The State of the Art

Proceedings of the 9th International Conference on Frontiers of Design and Manufacturing July 17~19, 2010, Changsha, China
Research on Multistable Compliant Mechanisms: The State of the Art
Chen G., Gou Y., Yang L. School of Mechatronics, Xidian University, Xi’an 710071, China
e-mail:[email protected]
Abstract: Compliant multistable mechanisms are a special class of compliant mechanisms which possess multiple stable equilibrium positions within these ranges of motion. Compliant multistable mechanisms can be roughly divided into two categories depending on the number of stable positions: compliant bistable mechanisms and compliant mechanisms with more than two stable positions. In the paper, we first review these two categories separately, and then discuss our current and future work on this topic under the financial support of the National Natural Science Foundation of China. Keywords: Compliant mechanisms, Bistability, Multistability 1 Introduction A multistable mechanism possesses multiple stable equilibrium positions within its range of motion. At these stable equilibrium positions, the mechanism can hold the positions without power input, even a small disturbance occurs. Many applications, such as switches, valves, relays, positioners, and memory cells, may benefit from a multistable mechanism.
Some multistable mechanisms achieve their multistability through the use of locking mechanisms, detents, or multiple energy domains (e.g., gravitational and magnetic fields), which are beyond the scope of this review and will not be discussed in this paper.
A compliant mechanism, which achieves at least some of its mobility from the deflection of flexible segments rather than from articulated joints only, offers an effective and economical way to achieve multistability because the mechanism's energy storage and motion characteristics are directly related [1]. Therefore, much work has been done on compliant multistable mechanisms in the past decade. (The purpose of this paper is to present readers a general view)
Compliant multistable mechanisms can be roughly divided into two categories depending on the number of stable positions: compliant bistable mechanisms and compliant mechanisms with more than two stable positions. In the following, we first introduce these two categories separately, and then present our current work on this topic under the financial support of the National Natural Science Foundation of China. 2 Compliant Bistable Mechanisms Considerable work has been done on design and synthesis of compliant bistable mechanisms.
Most compliant bistable mechanism configurations in the literature achieve their bistability through the snap-through behavior of buckled beams. In such mechanisms, the flexible segments undergo combined compression and
bending loads during their motion from one stable position to the other. Fig. 1 illustrates a partially compliant bistable mechanism design (a partially compliant mechanism utilizes one or more traditional movable joints along with compliant segments to achieve its motion) while Figs. 2-3 show two fully compliant bistable mechanism designs (a fully compliant mechanism achieves all of its mobility from the deflections of flexible segments and can usually be fabricated as one-piece structure). All these designs are based on buckling behavior of flexible beams. The design shown in Fig. 2 employs a centrally-clamped parallel-beam structure to prevent higher buckling modes for the flexible beams [3]. In the design shown in Fig. 3, a rigid part is included in each of the flexible segments, which greatly increases the input force (the maximum force required to switch the mechanism from its first stable position to the second stable position) and the contact force (the maximum force required to switch the mechanism from its second stable position to the first stable position) of the bistable mechanism. When designing a micro bistable device, the fully compliant designs are preferable because of their inherent reduced clearances and improved wear characteristics. On the other hand, if large motion range between the two stable positions is required, the partially compliant design is a good choice.
Figure 1 A partially compliant bistable mechanism
employing elastica buckling beams [2]
Figure 2 A fully compliant bistable mechanisms
utilizing curved buckling beams [3]
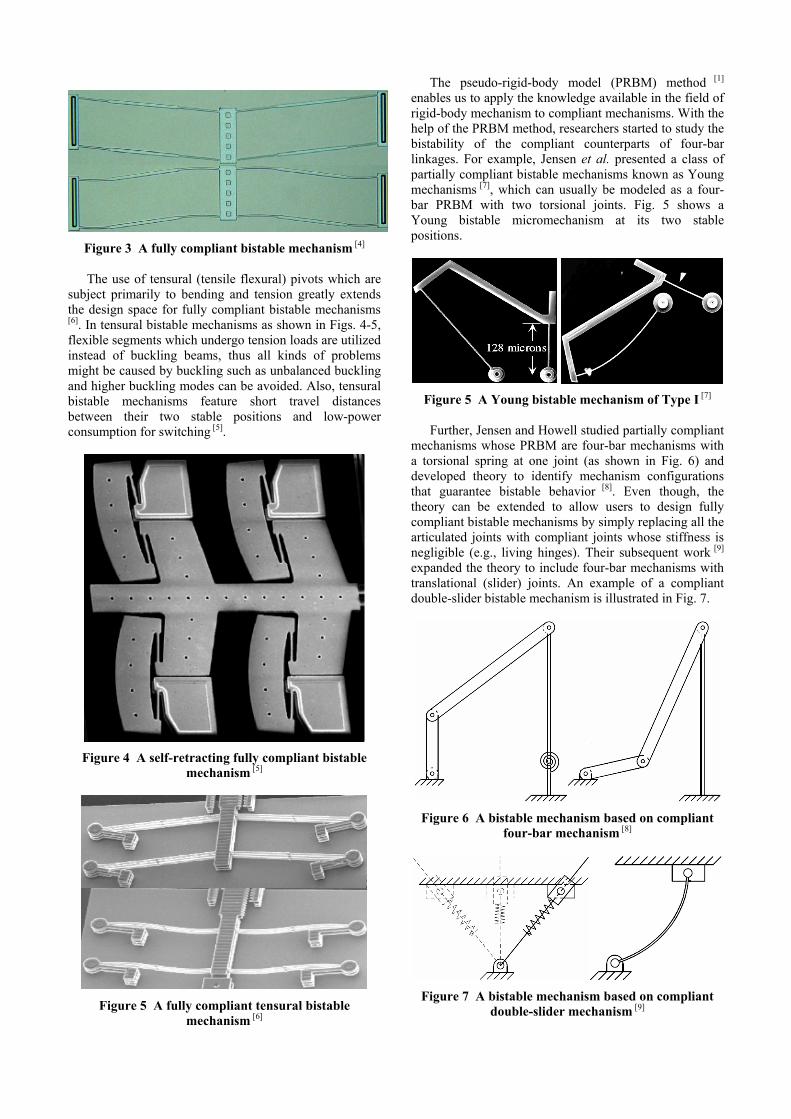
Figure 3 A fully compliant bistable mechanism [4]
The use of tensural (tensile flexural) pivots which are
subject primarily to bending and tension greatly extends the design space for fully compliant bistable mechanisms
[6]. In tensural bistable mechanisms as shown in Figs. 4-5, flexible segments which undergo tension loads are utilized instead of buckling beams, thus all kinds of problems might be caused by buckling such as unbalanced buckling and higher buckling modes can be avoided. Also, tensural bistable mechanisms feature short travel distances between their two stable positions and low-power consumption for switching [5].
Figure 4 A self-retracting fully compliant bistable
mechanism [5]
Figure 5 A fully compliant tensural bistable
mechanism [6]
The pseudo-rigid-body model (PRBM) method [1] enables us to apply the knowledge available in the field of rigid-body mechanism to compliant mechanisms. With the help of the PRBM method, researchers started to study the bistability of the compliant counterparts of four-bar linkages. For example, Jensen et al. presented a class of partially compliant bistable mechanisms known as Young mechanisms [7], which can usually be modeled as a four-bar PRBM with two torsional joints. Fig. 5 shows a Young bistable micromechanism at its two stable positions.
Figure 5 A Young bistable mechanism of Type I [7]
Further, Jensen and Howell studied partially compliant
mechanisms whose PRBM are four-bar mechanisms with a torsional spring at one joint (as shown in Fig. 6) and developed theory to identify mechanism configurations that guarantee bistable behavior [8]. Even though, the theory can be extended to allow users to design fully compliant bistable mechanisms by simply replacing all the articulated joints with compliant joints whose stiffness is negligible (e.g., living hinges). Their subsequent work [9] expanded the theory to include four-bar mechanisms with translational (slider) joints. An example of a compliant double-slider bistable mechanism is illustrated in Fig. 7.
Figure 6 A bistable mechanism based on compliant
four-bar mechanism [8]
Figure 7 A bistable mechanism based on compliant
double-slider mechanism [9]

3 Compliant Multistable Mechanisms with More Than Two Stable Positions Compared with bistable mechanisms, compliant mechanisms with more than two stable equilibrium positions have received less attention (is gaining attention/interest). In the following, a brief review on the recent work on this topic is presented as far as the authors’ knowledge. However, this does not intend to be an exhaustive summary.
It is easily understood that a symmetric compliant mechanism will exhibit tristability if it is bistable in one direction of motion and one of the stable positions occurs at the point of symmetry in an undeflected position [10]. Based on the theory of identifying bistable mechanism configurations for four-bar mechanisms mentioned above, Pendleton and Jensen designed a symmetric Grashof mechanism (with the coupler link used as the input link) that exhibits tristability, as shown in Fig. 8. A miniature device of this tristable mechanism which is made of formed wire is shown in Fig. 9.
Figure 8 A tristable mechanism based on compliant
symmetric four-bar mechanism [10]
Figure 9 A wireform tristable mechanism [11]
Figure 10 A quadstable compliant mechanism employing orthogonal bistable mechanisms [12]
Han et al. [12] designed a quadstable compliant
mechanism (provides four states of output), which is realized by orthogonally nesting one buckling-beam bistable mechanism in another, as illustrated in Fig. 10.
Undoubtedly, the buckling-beam bistable mechanisms incorporated in the quadstable mechanism design can be replaced by any kind of bistable mechanism that provides linear motion, such as the ones shown in Figs. 4-5.
Oh and Kota [13] developed an approach to synthesize compliant multistable mechanisms by connecting multiple bistable mechanisms of different load thresholds in series. Therefore, when using this approach, designing a multistable mechanism can simply be boiled down to designing different bistable mechanisms. A series combination of two bistable mechanisms can provide up to four stable equilibrium positions, as instantiated in Fig. 11. It should be noted that the accessibilities of the stable positions of a multistable mechanism designed using this approach are path-dependent due to the series structure [16].
Figure 11 A rotational quadstable mechanism
consisting two bistable mechanisms of different load thresholds [13]
Similarly, Gerson et al. [14] presented a design method
of multistable large displacement micro actuators based on serially connected bistable elements. Such a multistable actuator provides displacement outputs through a sequence of snap-through actions and requires relative low voltage for actuation.
Figure 12 A schematic of a multistable large
displacement micro actuator [14]

A COmpliant Rolling-contact Element (CORE) is a contact-aided compliant mechanism that eliminates friction and wear by allowing two surfaces to roll on each other [15]. Multistability of a CORE may be achieved by having the CORE flexure to undergo different magnitudes of tension (making the flexure to store or release strain energy due to tension) at varying angular displacements. The tension magnitude of the flexure can be changed by incorporating a cam follower mechanism parallel to the CORE mechanism, as shown in Fig. 13. Fig. 14 illustrates the operating principle of the CORE [15]: when the cam is not engaged (as shown in Fig. 14(a)), the flexure remain unstretched and the CORE behaves as a standard CORE mechanism; as the CORE is displaced and the cam is engaged (as shown in Fig. 14(b)), the CORE surface separates thus the flexure is stretched to store strain energy. Further on, as the cam is disengaged, the strain energy is released, creating stability in the CORE system.
Figure 13 A tension-based multistable CORE
constructed of three CORE planes and two cam and follower planes [15]
(a) Stable equilibrium position (b) Unstable equilibrium position
Figure 14 A tension-based multistable compliant rolling-contact mechanism [15]
4 Our work Supported by the National Natural Science Foundation of China, our research group (Compliant & Precise Mechanisms Research Group) at Xidian University is conducting research on synthesis of tristable mechanisms. A brief introduction to our recent research is presented in the following.
We proposed a fully compliant tristable mechanism configuration called dancing tristable mechanism (because the three stable positions of this kind of mechanism look
like dancing postures of mankind, as can be seen from Fig. 15), which achieves three stable equilibrium positions by orthogonally assembling a linear bistable mechanism and a compliant end-effector. Fig. 15 shows an example of this tristable configuration. In this design, the end-effector travels to the left or right, and the bistable mechanism provides the latching force required to hold the end-effector at a deflected position. Microscale devices were also fabricated to demonstrate its feasibility in MEMS.
A variant of the dancing tristable mechanism called lamina emergent dancing tristable mechanism was designed and fabricated for testing, as shown in Fig. 16. Lamina emergent mechanisms are compliant mechanisms manufactured from sheet goods with motion out of the plane of manufacture [18]. Lamina emergent tristable mechanisms, providing two stable equilibrium positions out of the plane of manufacture, might be useful for deployable structures and reconfigurable robots.
Figure 15 A planar tristable mechanism [16]
Figure 16 A lamina emergent tristable mechanism [16]
We presented another class of tristable mechanisms
called double tensural tristable mechanisms (DTTMs), which incorporate flexible elements experiencing combined tension and bending is presented [17]. It has been found that some fully compliant tensural bistable mechanisms (FTBM) [7] exhibit a soft spring-like behavior when pulled in the opposite direction from the as-fabricated position. The explanation of such behavior is that the tensural pivots become conventional flexural pivots which undergo combined compression and bending when FTBMs are pulled in the opposite direction. This is key to DTTM behavior because one FTBM coupled with a FTBM inversion has the potential for exhibiting tristable behavior. Fig. 17 shows the three stable equilibrium positions of a DTTM. When pulling up, the upper part of the model behaves as a soft spring while the lower part acts like a bistable mechanism. However, when pulling down, the roles are reversed and the upper part of the model behaves acts as a bistable mechanism while the lower part as a soft spring.

Figure 17 A double tensural tristable compliant micromechanism [17]. (a) Force gauge, (b) upper part, (c) lower part, and (d) vernier.
4 Future work In the future, we will extend our work on three main directions: (1) design of multistable compliant mechanisms with more than three stable positions, (2) systematic synthesis methods of multistable compliant mechanisms, and (3) applications of multistable compliant mechanisms. Acknowledgment The authors gratefully acknowledge the financial support from the National Natural Science Foundation of China under Grant No. 50805110, the Key Project of Chinese Ministry of Education under No. 109145, and the Fundamental Research Funds for the Central Universities under No. JY10000904010. References 1. Howell L.L., Compliant Mechanisms, Wiley, New York,
2001 2. Sönmez Ü. and Tutum C. C., A compliant bistable
mechanism design incorporating elastica buckling beam theory and pseudo-rigid-body model, Trans. ASME, J. Mech. Design, 130(4), 042304, 2008
3. Qiu J., Lang J.H., Slocum A.H., A curved-beam bistable mechanism, J. Microelectromech. Syst., 13, 137-146, 2004
4. Cherry, B.B., Howell, L.L., Jensen, B.D., Evaluating three-dimensional effects on the behavior of compliant bistable micromechanisms, J. Micromech. Microeng., 18(9), 095001, 2008.
5. Masters N.D., Howell L.L., A self-retracting fully compliant bistable micromechanism, J. Microelectromech. Syst., 12, 273-280, 2003
6. Wilcox D.L., Howell L.L., Fully compliant tensural bistable micromechanisms (FTBM), J. Microelectromech. Syst., 14(6), 1223-1235, 2005
7. Jensen B.D., Howell L.L., Salmon L.G., Design of two-link, in-plane, bistable compliant micro-mechanisms, Trans. ASME, J. Mech. Design, 121(3), 416-423, 1999
8. Jensen B.D., Howell L.L., Identification of compliant pseudo-rigid-body mechanism configurations resulting in bistable behavior, Trans. ASME, J. Mech. Design, 125, 701-708, 2003
9. Jensen B.D., Howell L.L., Bistable configurations of compliant mechanisms modeled using four links and
translational joints, Trans. ASME, J. Mech. Design, 126, 657-666, 2004
10. Pendleton T.M., Jensen B.D., Development of a tristable compliant mechanism, Proc. 12TH IFToMM World Congress, A835, 2007
11. Pendleton T.M., Jensen B.D., Compliant wireform mechanisms, Trans. ASME, J. Mech. Des., 130(12), 122302, 2008.
12. Han J.S., Muller C., Wallrabe U. and Korvink J.G., Design, simulation, and fabrication of a quadstable monolithic mechanism with X- and Y-directional bistable curved beams, Trans. ASME, J. Mech. Design, 129, 1198-1203, 2007
13. Oh Y.S., Synthesis of multistable equilibrium compliant mechanisms, Ph.D. thesis, The University of Michigan, Ann Arbor, Michigan, 2008
14. Gerson, Y., Krylov, S., Ilic, B., Schreiber, D., “Large displacement low voltage multistable micro actuator,” Proceedings of the IEEE 21st International Conference on Micro Electro Mechanical Systems, 463–466, 2008
15. Halverson P.A., Howell L.L., Magleby S.P., Tension-based multi-stable compliant rolling-contact elements, Mech. Mach. Theory, 45,(2), 147-156, 2010
16. Chen G., Aten Q.T., Zirbel S., Jensen B.D., Howell L.L., A tristable mechanism configuration employing orthogonal compliant mechanisms, Trans. ASME, J. Mech. Robot., 2(1), 014501, 2009
17. Chen G., Wilcox D.L., Howell L.L., Fully compliant double tensural tristable micromechanisms (DTTM), J. Micromech. Microeng., 19(2), 025011, 2009
18. Jacobsen, J.O., Chen, G., Howell, L.L., Magleby, S.P., Lamina Emergent Torsion (LET) Joint, Mech. Mach. Theory, 44(11), 2098-2109, 2009














![A Computational Design Tool for Compliant … Computational Design Tool for Compliant Mechanisms ... [Coros et al. 2013], ... A Computational Design Tool for Compliant Mechanisms •](https://static.fdocuments.us/doc/165x107/5a90e3117f8b9a4a268e64ed/pdfa-computational-design-tool-for-compliant-computational-design-tool-for.jpg)



