Research Article Structural Stability of Planar Bimodal...
9
Research Article Structural Stability of Planar Bimodal Linear Systems Josep Ferrer, Marta Peña, and Antoni Susín Departament de Matem` atica Aplicada I, Escola T` ecnica Superior d’Enginyeria Industrial de Barcelona, Universitat Polit` ecnica de Catalunya, Diagonal 647, 08028 Barcelona, Spain Correspondence should be addressed to Marta Pe˜ na; [email protected] Received 14 July 2014; Revised 21 October 2014; Accepted 9 November 2014; Published 23 December 2014 Academic Editor: Do Wan Kim Copyright © 2014 Josep Ferrer et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Structural stability ensures that the qualitative behavior of a system is preserved under small perturbations. We study it for planar bimodal linear dynamical systems, that is, systems consisting of two linear dynamics acting on each side of a given hyperplane and assuming continuity along the separating hyperplane. We describe which one of these systems is structurally stable when (real) spiral does not appear and when it does we give necessary and sufficient conditions concerning finite periodic orbits and saddle connections. In particular, we study the finite periodic orbits and the homoclinic orbits in the saddle/spiral case. 1. Introduction Structural stability ensures that the qualitative behavior of a system is preserved under small perturbations: a system is structurally stable if anyone in some neighborhood is equivalent to it (in particular, they have the same dynamical behavior). We study this property for a class of piecewise linear systems. Piecewise linear systems have attracted the interest of the researchers in recent years by their wide range of applications, as well as the possible theoretical approaches. See, for example, [1–8]. In particular, bimodal linear sys- tems consist of two subsystems acting on each side of a given hyperplane, assuming continuity along the separating hyperplane. We focus on the planar case. Indeed, it is very commonly found in applications (see the above references). As we have pointed out, a definition of structural stability involves a topology in the set of the considered systems (which defines the “small perturbations”) and an equivalence relation (which defines the “preservation of the behavior”). For piecewise linear systems, the natural topology is the one of the Euclidean space formed by the coefficients of the matrices which determine each subsystem. Concerning the equivalence relation, there are some different natural options. For example, for single linear systems, those having positive trace and positive determinant form a unique 0 - class, whereas they are partitioned in four 1 -classes (spirals, nodes, improper nodes, and starred nodes). Anyway, when a topology and an equivalence relation are fixed, the struc- tural stability points are those belonging to an open equiva- lence class. Alternative approaches are possible. For example, in [9], one asks about generic properties, which are verified by “almost all” piecewise linear systems. From a topological point of view, it is a matter of density instead of openness. Indeed, the properties there are both generic and stable. Also, Arnold’s techniques [10] can be partially applied because although the equivalence relation is not defined by the action of a Lie group, the equivalence classes are probably differentiable manifolds. Here, we focus on structural stability in the sense in [11], where a list of necessary and sufficient conditions is given for planar piecewise linear systems. Our aim is to specify these criteria in terms of the coefficients of the matrices, in the particular case of bimodal linear systems. e first step is collected in eorem 6. However, further specific studies are necessary in several cases. As a second step, we tackle (eorem 7) the existence of homoclinic orbits and finite periodic orbits in the saddle/spiral case. It allows us (Corollary 11) to ensure its structural stability for certain values of the parameters. We expect that, for bimodal systems, a full characterization of the structural stability in terms of the coefficients of the matrices is possible. Even more, we expect that also a systematic study of the bifurcations is possible. Bifurcations are the frontier points Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2014, Article ID 892948, 8 pages http://dx.doi.org/10.1155/2014/892948
Transcript of Research Article Structural Stability of Planar Bimodal...

Research ArticleStructural Stability of Planar Bimodal Linear Systems
Josep Ferrer Marta Pentildea and Antoni Susiacuten
Departament de Matematica Aplicada I Escola Tecnica Superior drsquoEnginyeria Industrial de BarcelonaUniversitat Politecnica de Catalunya Diagonal 647 08028 Barcelona Spain
Correspondence should be addressed to Marta Pena martapenyaupcedu
Received 14 July 2014 Revised 21 October 2014 Accepted 9 November 2014 Published 23 December 2014
Academic Editor Do Wan Kim
Copyright copy 2014 Josep Ferrer et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Structural stability ensures that the qualitative behavior of a system is preserved under small perturbations We study it for planarbimodal linear dynamical systems that is systems consisting of two linear dynamics acting on each side of a given hyperplane andassuming continuity along the separating hyperplane We describe which one of these systems is structurally stable when (real)spiral does not appear and when it does we give necessary and sufficient conditions concerning finite periodic orbits and saddleconnections In particular we study the finite periodic orbits and the homoclinic orbits in the saddlespiral case
1 Introduction
Structural stability ensures that the qualitative behavior ofa system is preserved under small perturbations a systemis structurally stable if anyone in some neighborhood isequivalent to it (in particular they have the same dynamicalbehavior) We study this property for a class of piecewiselinear systems Piecewise linear systems have attracted theinterest of the researchers in recent years by their wide rangeof applications as well as the possible theoretical approachesSee for example [1ndash8] In particular bimodal linear sys-tems consist of two subsystems acting on each side of agiven hyperplane assuming continuity along the separatinghyperplane We focus on the planar case Indeed it is verycommonly found in applications (see the above references)
As we have pointed out a definition of structural stabilityinvolves a topology in the set of the considered systems(which defines the ldquosmall perturbationsrdquo) and an equivalencerelation (which defines the ldquopreservation of the behaviorrdquo)For piecewise linear systems the natural topology is theone of the Euclidean space formed by the coefficients ofthe matrices which determine each subsystem Concerningthe equivalence relation there are some different naturaloptions For example for single linear systems those havingpositive trace and positive determinant form a unique 1198620-class whereas they are partitioned in four 1198621-classes (spiralsnodes improper nodes and starred nodes) Anyway when
a topology and an equivalence relation are fixed the struc-tural stability points are those belonging to an open equiva-lence class
Alternative approaches are possible For example in [9]one asks about generic properties which are verified byldquoalmost allrdquo piecewise linear systems From a topologicalpoint of view it is a matter of density instead of opennessIndeed the properties there are both generic and stable AlsoArnoldrsquos techniques [10] can be partially applied becausealthough the equivalence relation is not defined by theaction of a Lie group the equivalence classes are probablydifferentiable manifolds
Here we focus on structural stability in the sense in [11]where a list of necessary and sufficient conditions is givenfor planar piecewise linear systems Our aim is to specifythese criteria in terms of the coefficients of the matricesin the particular case of bimodal linear systems The firststep is collected in Theorem 6 However further specificstudies are necessary in several cases As a second step wetackle (Theorem 7) the existence of homoclinic orbits andfinite periodic orbits in the saddlespiral case It allows us(Corollary 11) to ensure its structural stability for certainvalues of the parametersWe expect that for bimodal systemsa full characterization of the structural stability in terms of thecoefficients of the matrices is possible
Even more we expect that also a systematic study of thebifurcations is possible Bifurcations are the frontier points
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 892948 8 pageshttpdxdoiorg1011552014892948
2 Mathematical Problems in Engineering
of an open class so that they come out of their class bysmall perturbations Again it depends on the consideredequivalence relation For example the improper nodes andthe starred nodes are 1198621-bifurcation between spirals andnodes but not 1198620-bifurcation because all of them are 1198620-equivalent Indeed the 1198621-frontier of spiralsnodes is strat-ified as follows a 1-codimensional manifold formed by theimproper nodes and a 3-codimensional manifold formed bythe starred nodes (Hence improper nodes appear genericallyin 1-parameterized families of linear systems whereas starrednodes appear only in 3-parameterized families) Here threebifurcations are presented in Corollary 11 1-codimensional(two of them) and 2-codimensional (the third one)
In Section 3 we adapt the conditions stated in [11] forpiecewise linear planar dynamical systems to the particularclass of bimodal ones We conclude that if some subsystemis a starred node a center or a degenerate node then thebimodal system is not structurally stable Moreover we listthe remaining possible cases and we ensure that the bimodalsystem is structurally stable if none of the subsystems is a(real) spiral The other cases need further specific analysis
In particular when a (real) spiral appears it is necessaryto study the finite periodic orbits and the homoclinic orbitsIn Section 4 we study the structural stability of bimodalsystems for the saddlespiral case We conclude that thisbimodal system is structurally stable if 0 lt 120574
1lt 120574119867 where 120574
1
is the trace of the spiral matrix and 120574119867is the only value where
a homoclinic orbit appears The study will be continued infuture works (see [12])
Throughout the paper R will denote the set of realnumbers119872
119899times119898(R) the set of matrices having 119899 rows and 119898
columns and entries in R (in the case where 119899 = 119898 we willsimply write 119872
119899(R)) and 119866119897
119899(R) the group of nonsingular
matrices in 119872119899(R) Finally we will denote by 119890
1 119890
119899the
natural basis of the Euclidean space R119899
2 Structurally Stable BLDS Definitions
We consider
(119905) = 1198601119909 (119905) + 1198611 if 119862119909 (119905) le 0
(119905) = 1198602x (119905) + 119861
2if 119862119909 (119905) ge 0
(1)
where 1198601 1198602isin 119872119899(R) 119861
1 1198612isin 119872119899times1(R) 119862 isin 119872
1times119899(R) We
assume that the dynamic is continuous along the separatinghyperplane 119867 = 119909 isin R119899 119862119909 = 0 that is to say bothsubsystems coincide with 119862119909(119905) = 0
By means of a linear change in the state variable 119909(119905) wecan consider 119862 = (1 0 sdot sdot sdot 0) isin 119872
1times119899(R) Hence119867 = 119909 isin
R119899 1199091= 0 and continuity along119867 is equivalent to
1198612= 1198611 119860
2119890119894= 1198601119890119894 2 le 119894 le 119899 (2)
We will write from now on 119861 = 1198611= 1198612
Definition 1 In the above conditions one says that the tripletof matrices (119860
1 1198602 119861) defines a bimodal linear dynamical
system (BLDS)
Table 1 Critical points classification
Spiral 11988621= 0 120582
1 1205822conjugate complex numbers
Saddle 11988621= 0 120582
1sdot 1205822lt 0
Node 11988621= 0 120582
1sdot 1205822gt 0 120582
1= 1205822
Starred node 11988621= 0 120582
1= 1205822= 120582 120582 = 0 120582 isin R
Improper node 11988621= 1 120582
1= 1205822= 120582 120582 = 0 120582 isin R
Degenerate node 11988621= 0 120582
1= 120582 120582
2= 0 120582 = 0 120582 isin R
The placement of the equilibrium points will play asignificative role in the dynamics of a BLDS So one definesthe following
Definition 2 Let one assume that a subsystem of a BLDShas a unique equilibrium point not lying in the separatinghyperplane One says that this equilibrium point is real if itis located in the half-space corresponding to the consideredsubsystem Otherwise one says that the equilibrium point isvirtual
It is clear that not any pair of equilibrium points arecompatible For example two real saddles are not possible(Table 1 lists the compatible pairs excluding centers starrednodes and degenerate nodes)
Our goal is to characterize the planar BLDS which arestructurally stable in the sense of [11]
Definition 3 A triplet of matrices (1198601 1198602 119861) defining a
BLDS is said to be (regularly) structurally stable if ithas a neighborhood 119881(119860
1 1198602 119861) such that for every
(1198601015840
1 1198601015840
2 1198611015840) isin 119881(119860
1 1198602 119861) there is a homeomorphismofR2
preserving the hyperplane119867 which maps the oriented orbitsof (11986010158401 1198601015840
2 1198611015840) into those of (119860
1 1198602 119861) and it is differentiable
when restricted to finite periodic orbits
A natural tool in the study of BLDS is simplifying thematrices 119860
1 1198602 119861 by means of changes in the variables 119909(119905)
which preserve the qualitative behavior of the system (inparticular the condition of structural stability) See [5] forsome partial results and [13] for a systematic obtention ofreduced forms So we consider linear changes in the statevariables space preserving the hyperplanes 119909
1(119905) = 119896 which
will be called admissible basis changes Thus they are basischanges given by a matrix 119878 isin 119866119897
119899(R)
119878 = (1 0
119880 119879) 119879 isin 119866119897
119899minus1(R) 119880 isin 119872
119899minus1times1(R) (3)
Also translations parallel to the hyperplane 119867 areallowed
3 Structurally Stable Planar BLDSGeneral Criteria
Let us consider a planar BLDS For each subsystem wefollow the terminology in [14] according to its Jordan reducedform except for the ldquofocusrdquo which we have substituted bythe denomination ldquostarred noderdquo Here we reproduce thisclassification
Mathematical Problems in Engineering 3
If we denote by ( 1205821 0119886211205822
) the reduced matrix then weidentify critical points classification as shown in Table 1
For the particular case of BLDS the general conditionsin [11] in order to be structurally stable can be simplified asfollows
Corollary 4 A planar BLDS is structurally stable if and onlyif the following conditions hold
(1) Singularities conditions
(a) all its singularities at infinity are disjoint from theseparating axis
(b) all its singularities at infinity are hyperbolic(c) all its finite singularities are disjoint from the
separating axis(d) all its finite singularities are hyperbolic(e) all its tangencies with the separating axis are
isolated
(2) Periodic orbits conditions
(a) all its finite periodic orbits are not tangent to theseparating axis
(b) all its finite periodic orbits are hyperbolic(c) the infinite periodic orbit at infinity is hyperbolic
(3) There are no finite orbits which joint either
(a) two different saddle points (ldquosaddle-saddleorbitsrdquo)
(b) a saddle point with itself (ldquosaddle-loop orbitsrdquo orldquohomoclinic orbitsrdquo)
(c) a saddle point and a tangency (ldquosaddle-tangencyorbitsrdquo)
We will specify these conditions for a triplet of matricesdefining a planar BLDS We begin with conditions (1)(a) and(1)(c) in Corollary 4
Lemma 5 The triplets of matrices representing a structurallystable planar BLDS can be reduced to the form
1198601= (
11988611
11988620) 119860
2= (
12057411
12057420)
119861 = (0
1198872
) 1198872
= 0
(4)
Proof Given a planar BLDS defined by a triplet (1198601 1198602 119861)
such as
1198601= (
11988611198863
11988621198864
) 1198602= (
12057411198863
12057421198864
) 119861 = (1198871
1198872
) (5)
the condition (1)(a) in Corollary 4 is equivalent to
(11988611198863
11988621198864
)(0
1) = 120582 (
0
1) (6)
which gives 1198863
= 0 As it is proved in [13] when 1198863
= 0 bymeans of a suitable admissible basis change the triplet can bereduced to
(11988611
11988620) (
12057411
12057420) (
1198871
1198872
) (7)
Moreover by means of the translation 1199092= 1199092+1198871 we obtain
(11988611
11988620) (
12057411
12057420) (
0
1198872
) (8)
Then the condition (1)(c) in Corollary 4 is equivalent to
(11988611
11988620)(
0
1199092119890
) + (0
1198872
) = (0
0) (9)
which gives 1198872
= 0
Now we apply the remaining conditions in Corollary 4
Theorem 6 Let one consider a planar BLDS as in Lemma 5
(1) The only tangency (ie 1(0 1199092) = 0) is the origin
(0 0)(2) If one of the subsystems is a center a degenerate node or
a starred node then the BLDS is not structurally stableMore in general the only BLDS verifying (1)(a) (1)(c)and (1)(d) in Corollary 4 are those in Table 2
(3) The cases 1 2 4 5 6 8 9 10 12 13 14 and 16(those where none of the subsystems is a real spiral) arestructurally stable
(4) In case 3 it is structurally stable if and only if
(a) the finite periodic orbits are hyperbolic(b) there are no saddle-loop orbits(c) there are no finite orbits connecting a saddle and
a tangency point
(5) In the cases 7 11 and 15 the BLDS is structurally stableif and only if the above condition (4)(a) holds
Proof We proceed with the same order for the proof
(1) Clearly 1(0 1199092) = 0 implies 119909
2= 0
(2) Starred nodes have been excluded by (1)(a) The con-dition (1)(d) excludes degenerate nodes and centersthat is to say for 119894 = 1 2
det119860119894= 0
if det119860119894gt 0 then trace119860
119894= 0
(10)
Therefore the subsystems have a unique equilibriumpoint
(minus1198872
1198862
1198861
1198872
1198862
) (minus1198872
1205742
1205741
1198872
1205742
) (11)
4 Mathematical Problems in Engineering
Table 2 Enumeration of the possible cases
Subsystem 1Subsystem 2 Virtual saddle Real node Real spiral Real improper nodeReal saddle 1 (119887
2gt 0) 2 (119887
2gt 0) 3 (119887
2gt 0) 4 (119887
2gt 0)
Virtual node 5 (1198872lt 0) 6 (119887
2gt 0) 7 (119887
2gt 0) 8 (119887
2gt 0)
Virtual spiral 9 (1198872lt 0) 10 (119887
2lt 0) 11 (119887
2gt 0) 12 (119887
2gt 0)
Virtual improper node 13 (1198872lt 0) 14 (119887
2lt 0) 15 (119887
2lt 0) 16 (119887
2gt 0)
But not all combinations (realvirtual) are possibleFor example let us assume a real saddle as subsystem1 (ie 119886
2gt 0 and 119887
2gt 0) Then the subsystem 2 must
be for 1205742gt 0 a virtual saddle and for 120574
2lt 0 a real
node a real improper node or a real spiral They arethe cases 1 2 4 and 3 respectively Analogously forthe remainder cases of the table
(3) As starred nodes and degenerate nodes are excludedall the BLDS in Table 2 satisfy condition (1)(b)in Corollary 4 Moreover the feature that the onlytangency point is the origin implies the conditions(1)(e) and (2)(a) (we notice that centers are excluded)Concerning (2)(c) it is clear that only in the case 11there exists infinite periodic orbit at infinity and thatit is hyperbolic (its character of attractingrepellingdepends on the signs of the real and imaginary part ofthe complex eigenvalues) Obviously condition (3)(a)makes no sense in Table 2Again the remaining conditions (2)(b) (3)(b) and(3)(c) make no sense in the cases listed in point 3 ofTheorem 6 so that they are structurally stable
(4) On the other hand they must be verified in case 3 weadapt them to (a) (b) and (c) in point 4 ofTheorem 6
(5) Finally in the cases in point 5 only (a) must beverified because again (b) and (c) make no sense
4 Structurally Stable Planar BLDSSpecific Studies
Theorem 6 collects the conclusions of applying to planarBLDS the general criteria in [11] for a piecewise linear systemto be structurally stable Nevertheless cases 3 7 11 and 15need additional specific studies For example see in [15 16]partial results concerning case 7 In this section we focus onconditions (a) and (b) of case 3 for divergent spirals leavingthe remaining cases for future works
Thus let us assume a BLDS as in Lemma 5 verifying thefollowing
(i) The left subsystem is a real saddle that is 1198862
gt
0 1198872
gt 0 In particular its equilibrium point is(minus11988721198862 1198861(11988721198862)) and the invariant manifold cuts
the separating line at (0 minus11988721205822) and (0 minus119887
21205821)
where 1205822lt 0 lt 120582
1are the eigenvalues of 119860
1
(Consider 1205821+ 1205822= 1198861 12058211205822= minus1198862)
(ii) The right subsystem is a real divergent spiral thatis 1205741gt 0 120574
2lt 0 and 1205742
1lt minus4120574
2 In particular
its equilibrium point is (minus11988721205742 1205741(11988721205742)) We write
120572 plusmn 119894120573 120573 gt 0 the eigenvalues of 1198602 (Consider
2120572 = 1205741 1205722 + 1205732 = minus120574
2)
Theorem 7 As above let one assume
1198872gt 0 119886
2gt 0 120574
1gt 0
1205742lt 0 120574
2
1lt minus4120574
2
(12)
and let
1205822lt 0 lt 120582
1119905ℎ119890 119890119894119892119890119899V119886119897119906119890119904 119900119891 119860
1
120572 plusmn 119894120573 120573 gt 0 119905ℎ119890 119890119894119892119890119899V119886119897119906119890119904 119900119891 1198602
(13)
In addition let119872 gt 0 and 0 lt 120593 lt 120587 defined by
119872 cos (120593) = 120572 minus1205722+ 1205732
1205822
119872 sin (120593) = 120573 (14)
Then consider the following
(1)
(a) If 1198861gt 0 then there is no homoclinic orbit
(b) If 1198861= 0 then there is a homoclinic orbit only for
1205741= 0 which is not a considered case
(c) If 1198861lt 0 the only homoclinic (ie saddle-loop)
orbit appears for the value 120574119867of 1205741verifying
119905 =1
1205741
ln(1205822
2
1205822
1
1205822
1minus 12057411205821minus 1205742
1205822
2minus 12057411205822minus 1205742
) (15)
being
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(16)
Moreover 120574119867gt 119886112057421198862
(2)
(a) If 1198861gt 0 then there are no finite periodic orbits
(b) If 1198861= 0 then there are finite periodic orbits (all
of them) only for 1205741= 0 which is not a considered
case(c) If 119886
1lt 0 at least a finite periodic orbit appears
for 0 lt 1205741lt 120574119867 all of the finite periodic orbits
being hyperbolic and disjoint from the tangencypoints No saddle-tangency orbits appear
Mathematical Problems in Engineering 5
The proof is based on the following lemmas
Lemma 8 A spiral cuts 1199091= 0 in 119909
21and 119909
22 if and only if
exp (120583119905) =1198872+ 12058311990922
1198872+ 12058311990921
(17)
where 120583 = 120572 + 119894120573
Proof The solution of the system for the spiral is
(1199091(119905)
1199092(119905)) = (
120583 120583
12057421205742
)(exp (120583119905) 0
0 exp (120583119905))(120583 120583
12057421205742
)
minus1
times(
1199091(0) +
1198872
1205742
1199092(0) minus 120574
1
1198872
1205742
)+(
minus1198872
1205742
1205741
1198872
1205742
)
(18)
where 120583 is the conjugate of the eigenvalue 120583Considering that the starting and final point have 119909
1= 0
and denoting 1199092(0) = 119909
21and 119909
2(119905) = 119909
22 we get
1205742(120583 minus 120583)(
1198872
1205742
11990922minus 1205741
1198872
1205742
)
= (120583 exp (120583119905) 120583 exp (120583119905)1205742exp (120583119905) 120574
2exp (120583119905))(
1198872minus 120583(119909
21minus 1205741
1198872
1205742
)
minus1198872+ 120583(119909
21minus 1205741
1198872
1205742
)
)
(19)
Multiplying both sides of the system by (1205742 minus120583) we obtain
exp (120583119905) =1198872minus 12058311990922+ 1205831205741(11988721205742)
1198872minus 12058311990921+ 1205831205741(11988721205742)
(20)
which is equivalent to
exp (120583119905) =1198872+ 12058311990922
1198872+ 12058311990921
(21)
Lemma 9 Let one consider the saddle-spiral orbit passingthrough (0 minus119887
21205822) Then its first intersection with the sepa-
rating hyperplane (if it exists) is determined by
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(22)
Proof Using Lemma 8 imposing that 11990921= minus11988721205822 we get
11990922=
1198872
1205722 + 1205732[(119872 exp (120572119905) cos (120573119905 minus 120593) minus 120572)
+ 119894 (119872 exp (120572119905) sin (120573119905 minus 120593) + 120573)] (23)
Lemma 10 Let one assume that a finite periodic orbit existsThen
119860+1205741= minus119860minus1198861 (24)
where119860+ and119860minus are the enclosed areas in the right and the leftside respectively
Proof An analogous result is proved in [16] by means ofGreenrsquos formula Alternatively here we follow the approachin [17] Let us consider the following continuous energyfunction
119864minus=1
2(11988621199091+ 1198872)2minus1
21199092
2if 1199091le 0
119864+=1
2(12057421199091+ 1198872)2minus1
21199092
2if 1199091ge 0
(25)
If we consider the following energy piecewise functionthe change in energy Δ119864 along a periodic orbit must be nullHence
0 = Δ119864 = 119864+(0 119909119898
2) minus 119864+(0 119909119872
2)
+ 119864minus(0 119909119872
2) minus 119864minus(0 119909119898
2)
= int
119909119898
2
119909119872
2
119889119864+
1198891199092
1198891199092+ int
119909119872
2
119909119898
2
119889119864minus
1198891199092
1198891199092
(26)
where 1199091198722
and 1199091198982are the top and the bottom intersections
with the separating hyperplane respectivelyBut (25) implies
119889119864+
1198891199092
= (12057421199091+ 1198872)1198891199091
1198891199092
minus 1199092
(27)
and from the equations of the bimodal system we have
1198891199091
1198891199092
=12057411199091+ 1199092
12057421199091+ 1198872
(28)
so
119889119864+
1198891199092
= 12057411199091 (29)
And the first integral can be computed by
int
119909119898
2
119909119872
2
119889119864+
1198891199092
1198891199092= minus1205741119860+ (30)
where 119860+ is the enclosed areas in the right side And
analogously for the other integralThus Δ119864 = 0 if and only if
119860+1205741= minus119860minus1198861 (31)
Proof of Theorem 7 (1)(b) (2)(b) For 1198861= 1205741= 0 it is
obvious that we have a saddlecenter (119886 not considered case)being both subsystems symmetric with regard to the axis
6 Mathematical Problems in Engineering
1199092
= 0 Then we have a homoclinic orbit (the firstintersection with 119909
1= 0 of the orbit passing through
(0 minus11988721205822) is just (0 minus119887
21205821)) and all the orbits inside it are
finite periodic orbitsIt is also clear that if 120574
1increases (being 119886
1= 0) then the
orbit passing through (0 minus11988721205822) cuts the axis 119909
1= 0 below
(0 minus11988721205821) (notice that the spirals become divergent and the
equilibrium point descends) So the homoclinic and the finiteperiodic orbits disappear
(1)(a) (2)(a) If in addition 1198861increases then the point
(0 minus11988721205821) ascends
(1)(c) Using Lemma 9 imposing that its first intersectionwith the separating hyperplane cuts at (0 minus119887
21205821)
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(32)
being
1198872
1205722 + 1205732(119872 exp (120572119905) cos (120573119905 minus 120593) minus 120572) = minus
1198872
1205821
(33)
we get
119905 =1
1205741
ln(1205822
2
1205822
1
1205822
1minus 12057411205821minus 1205742
1205822
2minus 12057411205822minus 1205742
) (34)
Moreover for the existence of the homoclinic orbit it mustbe verified that
1205822
2
1205822
1
1205822
1minus 1205741198671205821minus 1205742
1205822
2minus 1205741198671205822minus 1205742
gt 1 (35)
which is equivalent to
12057411986711988621205822minus 12057421205822
2gt 12057411986711988621205821minus 12057421205822
1(36)
and from it we get
120574119867gt11988611205742
1198862
(37)
(2)(c) For 0 lt 1205741lt 120574119867 we claim that there is at least a stable
limit cycleThe first step is to show that a periodic solution exists
We use the classical argument of Poincare (as eg in [17])Consider a trajectory that starts at height 119909
2on the right
side of the separating hyperplane crosses to the left sideand intersects the left side of the same hyperplane at somenew height 119875(119909
2) The mapping from 119909
2to 119875(119909
2) is called
the Poincare map It tells us how the height of a trajectorychanges after one lap If we can show that there is a point119909lowast
2such that 119875(119909lowast
2) = 119909
lowast
2 then the corresponding trajectory
will be a periodic orbit and it is stable if |1198751015840(1199092)| lt 1 Being
linear both subsystems 119875(1199092) can be easily computed See
for example Figure 1 In order to show that such a 119909lowast2must
exist it is sufficient to know what the graph of 119875(1199092) looks
like roughlyLet us consider 0 le 119909
2le minus119887
21205822 For 119909
2= 0
we have the unique tangency trajectory so that the first
0 01 02 03 04 050
01
02
03
04
05
Figure 1 Distances between original and Poincare image pointsIntersection with the bisectrix corresponds to the stable limit cycleParameter values are the ones used for Example (1)
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 2 Appearance of a finite periodic orbit in case 3 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1
intersection with the separating line is under (0 0) and finally119875(0) gt 0 On the other hand for 119909
2= minus11988721205822 the first
intersection is upper (0 minus11988721205821) (recall 120574
1lt 120574119867) so that
119875(minus11988721205822) lt minus119887
21205822 Furthermore 119875(119909
2) is a continuous
function (from the theorem about the dependence of thesolutions on initial conditions) and indeed it is a smooth andmonotonic function (if not two trajectories would cross) Soby the intermediate value theorem the graph of 119875(119909
2) must
cross the bisectrix somewhere that intersection is our desired119909lowast
2We must exclude the possibility that 119875(119909
2) equiv 119909
2on
some interval in which case there would be a band ofinfinitelymany closed orbits If it happens Lemma 10 ensuresthat 119860+119860minus is constant (= minus119886
11205741) in this interval but
being119860+ 119860minus analytic functions the quotient will be constanteverywhere which is obviously false (eg when 119909
2rarr 0)
Finally as 119875(119909lowast2) = 119909
lowast
2is an isolated crossing and 119875(119909lowast
2)
is monotonic increasing then 0 lt 1198751015840(1199092) lt 1 so that the
periodic orbit is an attractor orbit
Mathematical Problems in Engineering 7
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 3 Appearance of a homoclinic orbit in case 3 1198861= minus1 119886
2=
1 1205741= 120574119867= 0742 120574
2= minus5 and 119887
2= 1
Other values 1199092verifying 119875(119909
2) = 1199092can appear But the
above reasoning shows that the possibility that 119875(1199092) equiv 1199092on
some interval is excluded so that the corresponding periodicorbit is again hyperbolic
Corollary 11 The systems in Theorem 7 with 1198861lt 0 and 0 lt
1205741lt 120574119867are structurally stable
Bifurcations appear for
(i) 1198861lt 0 120574
1= 120574119867 homoclinic orbit
(ii) 1198861lt 0 120574
1= 0 nonhyperbolic finite periodic orbits
(iii) 1198861= 0 1205741= 0 both kinds of orbits
Proof The existence of a periodic orbit implies that (3)(c)in Corollary 4 is verified Hence this case verifies all theconditions in that corollary
Examples (1)We show the structurally stable case 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1 in Figure 2 We
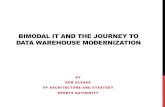
plot the phase portrait corresponding to the Poincare mapon the section 119909 = 0 for different initial points for each ofthem the orbits are integrated until the next oriented cutThe continuous lines correspond to inward spiraling orbitsand the discontinuous lines to outward spiraling ones Ahyperbolic finite periodic orbit exists between them
(2) Bifurcations are as follows
(i) homoclinic orbit (Figure 3) 1198861= minus1 119886
2= 1 120574
1= 120574119867
1205742= minus5 and 119887
2= 1
(ii) nonhyperbolic periodic orbits (Figure 4) 1198861= minus1
1198862= 1 1205741= 0 1205742= minus5 and 119887
2= 1
(iii) both kinds of orbits (Figure 5) 1198861= 0 119886
2= 1 120574
1= 0
1205742= minus5 and 119887
2= 1
Remark 12 In [12] some partial results for 1205741lt 0 and 120574
1gt 120574119867
have been presented
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
minus02 minus01 0 01 02 03 04 05 06
Figure 4 Appearance of nonhyperbolic periodic orbits in case 31198861= minus1 119886
2= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08
15
1
05
0
minus05
minus1
minus15
Figure 5 Appearance of both kinds of singularities in case 3 1198861= 0
1198862= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank Professor Rafael Ramirez for many helpfuldiscussions during the preparation of the paper This paperis supported by DGICYTMTM2011-23892 (Josep Ferrer andMarta Pena) and TIN2013-47137-C2-1-P (Antoni Susın)
References
[1] J C Artes J Llibre J C Medrado and M A TeixeiraldquoPiecewise linear differential systems with two real saddlesrdquoMathematics and Computers in Simulation vol 95 pp 13ndash222014
8 Mathematical Problems in Engineering
[2] K Camlibel M Heemels and H Schumacher ldquoStability andcontrollability of planar bimodal linear complementarity sys-temsrdquo in Proceedings of the 42nd IEEE Conference on Decisionand Control pp 1651ndash1656 December 2003
[3] K Camlibel M Heemels and H Schumacher ldquoOn the con-trollability of bimodal piecewise linear systemsrdquo in HybridSystems Computation and Control vol 2993 of Lecture Notesin Computer Science pp 250ndash264 Springer Berlin Germany2004
[4] M K Camlibel W P M H Heemels and J M SchumacherldquoA full characterization of stabilizability of bimodal piecewiselinear systems with scalar inputsrdquoAutomatica vol 44 no 5 pp1261ndash1267 2008
[5] V Carmona E Freire E Ponce and F Torres ldquoOn simplifyingand classifying piecewise-linear systemsrdquo IEEE Transactions onCircuits and Systems I Fundamental Theory and Applicationsvol 49 no 5 pp 609ndash620 2002
[6] M di Bernardo D J Pagano and E Ponce ldquoNonhyperbolicboundary equilibrium bifurcations in planar Filippov systemsa case study approachrdquo International Journal of Bifurcation andChaos vol 18 no 5 pp 1377ndash1392 2008
[7] J Ferrer M D Magret andM Pena ldquoBimodal piecewise lineardynamical systems Reduced formsrdquo International Journal ofBifurcation and Chaos vol 20 no 9 pp 2795ndash2808 2010
[8] J Llibre M Ordonez and E Ponce ldquoOn the existence anduniqueness of limit cycles in planar continuous piecewise linearsystems without symmetryrdquo Nonlinear Analysis Real WorldApplications vol 14 no 5 pp 2002ndash2012 2013
[9] R Lum and L O Chua ldquoGeneric properties of continuouspiecewise-linear vector fields in R2rdquo IEEE Transactions onCircuits and Systems vol 38 no 9 pp 1043ndash1066 1991
[10] V I Arnold ldquoOn matrices depending on parametersrdquo UspekhiMatematicheskikh Nauk vol 26 pp 101ndash114 1971
[11] J Sotomayor and R Garcia ldquoStructural stability of piecewise-linear vector fieldsrdquo Journal of Differential Equations vol 192no 2 pp 553ndash565 2003
[12] J Ferrer M Pena and A Susin ldquoTangency-saddle singularitiesof planar bimodal linear systemsrdquo in Proceedings of the Inter-national Conference on Mathematical Models and Methods inApplied Sciences Saint Petersburg Russia September 2014
[13] J Ferrer M Magret and M Pena ldquoDifferentiable families ofplanar bimodal linear control systemsrdquoMathematical Problemsin Engineering vol 2014 Article ID 292813 9 pages 2014
[14] M W Hirsch and S Smale Differential Equations DynamicalSystems and Linear Algebra Academic Press London UK 1974
[15] E Freire E Ponce F Rodrigo and F Torres ldquoBifurcationsets of continuous piecewise linear systems with two zonesrdquoInternational Journal of Bifurcation and Chaos vol 8 no 11 pp2073ndash2097 1998
[16] J Llibre and J Sotomayor ldquoPhase portraits of planar controlsystemsrdquoNonlinear Analysis Theory Methods and Applicationsvol 27 no 10 pp 1177ndash1197 1996
[17] S H Strogatz Nonlinear Dynamics and Chaos Perseus Books2000
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
of an open class so that they come out of their class bysmall perturbations Again it depends on the consideredequivalence relation For example the improper nodes andthe starred nodes are 1198621-bifurcation between spirals andnodes but not 1198620-bifurcation because all of them are 1198620-equivalent Indeed the 1198621-frontier of spiralsnodes is strat-ified as follows a 1-codimensional manifold formed by theimproper nodes and a 3-codimensional manifold formed bythe starred nodes (Hence improper nodes appear genericallyin 1-parameterized families of linear systems whereas starrednodes appear only in 3-parameterized families) Here threebifurcations are presented in Corollary 11 1-codimensional(two of them) and 2-codimensional (the third one)
In Section 3 we adapt the conditions stated in [11] forpiecewise linear planar dynamical systems to the particularclass of bimodal ones We conclude that if some subsystemis a starred node a center or a degenerate node then thebimodal system is not structurally stable Moreover we listthe remaining possible cases and we ensure that the bimodalsystem is structurally stable if none of the subsystems is a(real) spiral The other cases need further specific analysis
In particular when a (real) spiral appears it is necessaryto study the finite periodic orbits and the homoclinic orbitsIn Section 4 we study the structural stability of bimodalsystems for the saddlespiral case We conclude that thisbimodal system is structurally stable if 0 lt 120574
1lt 120574119867 where 120574
1
is the trace of the spiral matrix and 120574119867is the only value where
a homoclinic orbit appears The study will be continued infuture works (see [12])
Throughout the paper R will denote the set of realnumbers119872
119899times119898(R) the set of matrices having 119899 rows and 119898
columns and entries in R (in the case where 119899 = 119898 we willsimply write 119872
119899(R)) and 119866119897
119899(R) the group of nonsingular
matrices in 119872119899(R) Finally we will denote by 119890
1 119890
119899the
natural basis of the Euclidean space R119899
2 Structurally Stable BLDS Definitions
We consider
(119905) = 1198601119909 (119905) + 1198611 if 119862119909 (119905) le 0
(119905) = 1198602x (119905) + 119861
2if 119862119909 (119905) ge 0
(1)
where 1198601 1198602isin 119872119899(R) 119861
1 1198612isin 119872119899times1(R) 119862 isin 119872
1times119899(R) We
assume that the dynamic is continuous along the separatinghyperplane 119867 = 119909 isin R119899 119862119909 = 0 that is to say bothsubsystems coincide with 119862119909(119905) = 0
By means of a linear change in the state variable 119909(119905) wecan consider 119862 = (1 0 sdot sdot sdot 0) isin 119872
1times119899(R) Hence119867 = 119909 isin
R119899 1199091= 0 and continuity along119867 is equivalent to
1198612= 1198611 119860
2119890119894= 1198601119890119894 2 le 119894 le 119899 (2)
We will write from now on 119861 = 1198611= 1198612
Definition 1 In the above conditions one says that the tripletof matrices (119860
1 1198602 119861) defines a bimodal linear dynamical
system (BLDS)
Table 1 Critical points classification
Spiral 11988621= 0 120582
1 1205822conjugate complex numbers
Saddle 11988621= 0 120582
1sdot 1205822lt 0
Node 11988621= 0 120582
1sdot 1205822gt 0 120582
1= 1205822
Starred node 11988621= 0 120582
1= 1205822= 120582 120582 = 0 120582 isin R
Improper node 11988621= 1 120582
1= 1205822= 120582 120582 = 0 120582 isin R
Degenerate node 11988621= 0 120582
1= 120582 120582
2= 0 120582 = 0 120582 isin R
The placement of the equilibrium points will play asignificative role in the dynamics of a BLDS So one definesthe following
Definition 2 Let one assume that a subsystem of a BLDShas a unique equilibrium point not lying in the separatinghyperplane One says that this equilibrium point is real if itis located in the half-space corresponding to the consideredsubsystem Otherwise one says that the equilibrium point isvirtual
It is clear that not any pair of equilibrium points arecompatible For example two real saddles are not possible(Table 1 lists the compatible pairs excluding centers starrednodes and degenerate nodes)
Our goal is to characterize the planar BLDS which arestructurally stable in the sense of [11]
Definition 3 A triplet of matrices (1198601 1198602 119861) defining a
BLDS is said to be (regularly) structurally stable if ithas a neighborhood 119881(119860
1 1198602 119861) such that for every
(1198601015840
1 1198601015840
2 1198611015840) isin 119881(119860
1 1198602 119861) there is a homeomorphismofR2
preserving the hyperplane119867 which maps the oriented orbitsof (11986010158401 1198601015840
2 1198611015840) into those of (119860
1 1198602 119861) and it is differentiable
when restricted to finite periodic orbits
A natural tool in the study of BLDS is simplifying thematrices 119860
1 1198602 119861 by means of changes in the variables 119909(119905)
which preserve the qualitative behavior of the system (inparticular the condition of structural stability) See [5] forsome partial results and [13] for a systematic obtention ofreduced forms So we consider linear changes in the statevariables space preserving the hyperplanes 119909
1(119905) = 119896 which
will be called admissible basis changes Thus they are basischanges given by a matrix 119878 isin 119866119897
119899(R)
119878 = (1 0
119880 119879) 119879 isin 119866119897
119899minus1(R) 119880 isin 119872
119899minus1times1(R) (3)
Also translations parallel to the hyperplane 119867 areallowed
3 Structurally Stable Planar BLDSGeneral Criteria
Let us consider a planar BLDS For each subsystem wefollow the terminology in [14] according to its Jordan reducedform except for the ldquofocusrdquo which we have substituted bythe denomination ldquostarred noderdquo Here we reproduce thisclassification
Mathematical Problems in Engineering 3
If we denote by ( 1205821 0119886211205822
) the reduced matrix then weidentify critical points classification as shown in Table 1
For the particular case of BLDS the general conditionsin [11] in order to be structurally stable can be simplified asfollows
Corollary 4 A planar BLDS is structurally stable if and onlyif the following conditions hold
(1) Singularities conditions
(a) all its singularities at infinity are disjoint from theseparating axis
(b) all its singularities at infinity are hyperbolic(c) all its finite singularities are disjoint from the
separating axis(d) all its finite singularities are hyperbolic(e) all its tangencies with the separating axis are
isolated
(2) Periodic orbits conditions
(a) all its finite periodic orbits are not tangent to theseparating axis
(b) all its finite periodic orbits are hyperbolic(c) the infinite periodic orbit at infinity is hyperbolic
(3) There are no finite orbits which joint either
(a) two different saddle points (ldquosaddle-saddleorbitsrdquo)
(b) a saddle point with itself (ldquosaddle-loop orbitsrdquo orldquohomoclinic orbitsrdquo)
(c) a saddle point and a tangency (ldquosaddle-tangencyorbitsrdquo)
We will specify these conditions for a triplet of matricesdefining a planar BLDS We begin with conditions (1)(a) and(1)(c) in Corollary 4
Lemma 5 The triplets of matrices representing a structurallystable planar BLDS can be reduced to the form
1198601= (
11988611
11988620) 119860
2= (
12057411
12057420)
119861 = (0
1198872
) 1198872
= 0
(4)
Proof Given a planar BLDS defined by a triplet (1198601 1198602 119861)
such as
1198601= (
11988611198863
11988621198864
) 1198602= (
12057411198863
12057421198864
) 119861 = (1198871
1198872
) (5)
the condition (1)(a) in Corollary 4 is equivalent to
(11988611198863
11988621198864
)(0
1) = 120582 (
0
1) (6)
which gives 1198863
= 0 As it is proved in [13] when 1198863
= 0 bymeans of a suitable admissible basis change the triplet can bereduced to
(11988611
11988620) (
12057411
12057420) (
1198871
1198872
) (7)
Moreover by means of the translation 1199092= 1199092+1198871 we obtain
(11988611
11988620) (
12057411
12057420) (
0
1198872
) (8)
Then the condition (1)(c) in Corollary 4 is equivalent to
(11988611
11988620)(
0
1199092119890
) + (0
1198872
) = (0
0) (9)
which gives 1198872
= 0
Now we apply the remaining conditions in Corollary 4
Theorem 6 Let one consider a planar BLDS as in Lemma 5
(1) The only tangency (ie 1(0 1199092) = 0) is the origin
(0 0)(2) If one of the subsystems is a center a degenerate node or
a starred node then the BLDS is not structurally stableMore in general the only BLDS verifying (1)(a) (1)(c)and (1)(d) in Corollary 4 are those in Table 2
(3) The cases 1 2 4 5 6 8 9 10 12 13 14 and 16(those where none of the subsystems is a real spiral) arestructurally stable
(4) In case 3 it is structurally stable if and only if
(a) the finite periodic orbits are hyperbolic(b) there are no saddle-loop orbits(c) there are no finite orbits connecting a saddle and
a tangency point
(5) In the cases 7 11 and 15 the BLDS is structurally stableif and only if the above condition (4)(a) holds
Proof We proceed with the same order for the proof
(1) Clearly 1(0 1199092) = 0 implies 119909
2= 0
(2) Starred nodes have been excluded by (1)(a) The con-dition (1)(d) excludes degenerate nodes and centersthat is to say for 119894 = 1 2
det119860119894= 0
if det119860119894gt 0 then trace119860
119894= 0
(10)
Therefore the subsystems have a unique equilibriumpoint
(minus1198872
1198862
1198861
1198872
1198862
) (minus1198872
1205742
1205741
1198872
1205742
) (11)
4 Mathematical Problems in Engineering
Table 2 Enumeration of the possible cases
Subsystem 1Subsystem 2 Virtual saddle Real node Real spiral Real improper nodeReal saddle 1 (119887
2gt 0) 2 (119887
2gt 0) 3 (119887
2gt 0) 4 (119887
2gt 0)
Virtual node 5 (1198872lt 0) 6 (119887
2gt 0) 7 (119887
2gt 0) 8 (119887
2gt 0)
Virtual spiral 9 (1198872lt 0) 10 (119887
2lt 0) 11 (119887
2gt 0) 12 (119887
2gt 0)
Virtual improper node 13 (1198872lt 0) 14 (119887
2lt 0) 15 (119887
2lt 0) 16 (119887
2gt 0)
But not all combinations (realvirtual) are possibleFor example let us assume a real saddle as subsystem1 (ie 119886
2gt 0 and 119887
2gt 0) Then the subsystem 2 must
be for 1205742gt 0 a virtual saddle and for 120574
2lt 0 a real
node a real improper node or a real spiral They arethe cases 1 2 4 and 3 respectively Analogously forthe remainder cases of the table
(3) As starred nodes and degenerate nodes are excludedall the BLDS in Table 2 satisfy condition (1)(b)in Corollary 4 Moreover the feature that the onlytangency point is the origin implies the conditions(1)(e) and (2)(a) (we notice that centers are excluded)Concerning (2)(c) it is clear that only in the case 11there exists infinite periodic orbit at infinity and thatit is hyperbolic (its character of attractingrepellingdepends on the signs of the real and imaginary part ofthe complex eigenvalues) Obviously condition (3)(a)makes no sense in Table 2Again the remaining conditions (2)(b) (3)(b) and(3)(c) make no sense in the cases listed in point 3 ofTheorem 6 so that they are structurally stable
(4) On the other hand they must be verified in case 3 weadapt them to (a) (b) and (c) in point 4 ofTheorem 6
(5) Finally in the cases in point 5 only (a) must beverified because again (b) and (c) make no sense
4 Structurally Stable Planar BLDSSpecific Studies
Theorem 6 collects the conclusions of applying to planarBLDS the general criteria in [11] for a piecewise linear systemto be structurally stable Nevertheless cases 3 7 11 and 15need additional specific studies For example see in [15 16]partial results concerning case 7 In this section we focus onconditions (a) and (b) of case 3 for divergent spirals leavingthe remaining cases for future works
Thus let us assume a BLDS as in Lemma 5 verifying thefollowing
(i) The left subsystem is a real saddle that is 1198862
gt
0 1198872
gt 0 In particular its equilibrium point is(minus11988721198862 1198861(11988721198862)) and the invariant manifold cuts
the separating line at (0 minus11988721205822) and (0 minus119887
21205821)
where 1205822lt 0 lt 120582
1are the eigenvalues of 119860
1
(Consider 1205821+ 1205822= 1198861 12058211205822= minus1198862)
(ii) The right subsystem is a real divergent spiral thatis 1205741gt 0 120574
2lt 0 and 1205742
1lt minus4120574
2 In particular
its equilibrium point is (minus11988721205742 1205741(11988721205742)) We write
120572 plusmn 119894120573 120573 gt 0 the eigenvalues of 1198602 (Consider
2120572 = 1205741 1205722 + 1205732 = minus120574
2)
Theorem 7 As above let one assume
1198872gt 0 119886
2gt 0 120574
1gt 0
1205742lt 0 120574
2
1lt minus4120574
2
(12)
and let
1205822lt 0 lt 120582
1119905ℎ119890 119890119894119892119890119899V119886119897119906119890119904 119900119891 119860
1
120572 plusmn 119894120573 120573 gt 0 119905ℎ119890 119890119894119892119890119899V119886119897119906119890119904 119900119891 1198602
(13)
In addition let119872 gt 0 and 0 lt 120593 lt 120587 defined by
119872 cos (120593) = 120572 minus1205722+ 1205732
1205822
119872 sin (120593) = 120573 (14)
Then consider the following
(1)
(a) If 1198861gt 0 then there is no homoclinic orbit
(b) If 1198861= 0 then there is a homoclinic orbit only for
1205741= 0 which is not a considered case
(c) If 1198861lt 0 the only homoclinic (ie saddle-loop)
orbit appears for the value 120574119867of 1205741verifying
119905 =1
1205741
ln(1205822
2
1205822
1
1205822
1minus 12057411205821minus 1205742
1205822
2minus 12057411205822minus 1205742
) (15)
being
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(16)
Moreover 120574119867gt 119886112057421198862
(2)
(a) If 1198861gt 0 then there are no finite periodic orbits
(b) If 1198861= 0 then there are finite periodic orbits (all
of them) only for 1205741= 0 which is not a considered
case(c) If 119886
1lt 0 at least a finite periodic orbit appears
for 0 lt 1205741lt 120574119867 all of the finite periodic orbits
being hyperbolic and disjoint from the tangencypoints No saddle-tangency orbits appear
Mathematical Problems in Engineering 5
The proof is based on the following lemmas
Lemma 8 A spiral cuts 1199091= 0 in 119909
21and 119909
22 if and only if
exp (120583119905) =1198872+ 12058311990922
1198872+ 12058311990921
(17)
where 120583 = 120572 + 119894120573
Proof The solution of the system for the spiral is
(1199091(119905)
1199092(119905)) = (
120583 120583
12057421205742
)(exp (120583119905) 0
0 exp (120583119905))(120583 120583
12057421205742
)
minus1
times(
1199091(0) +
1198872
1205742
1199092(0) minus 120574
1
1198872
1205742
)+(
minus1198872
1205742
1205741
1198872
1205742
)
(18)
where 120583 is the conjugate of the eigenvalue 120583Considering that the starting and final point have 119909
1= 0
and denoting 1199092(0) = 119909
21and 119909
2(119905) = 119909
22 we get
1205742(120583 minus 120583)(
1198872
1205742
11990922minus 1205741
1198872
1205742
)
= (120583 exp (120583119905) 120583 exp (120583119905)1205742exp (120583119905) 120574
2exp (120583119905))(
1198872minus 120583(119909
21minus 1205741
1198872
1205742
)
minus1198872+ 120583(119909
21minus 1205741
1198872
1205742
)
)
(19)
Multiplying both sides of the system by (1205742 minus120583) we obtain
exp (120583119905) =1198872minus 12058311990922+ 1205831205741(11988721205742)
1198872minus 12058311990921+ 1205831205741(11988721205742)
(20)
which is equivalent to
exp (120583119905) =1198872+ 12058311990922
1198872+ 12058311990921
(21)
Lemma 9 Let one consider the saddle-spiral orbit passingthrough (0 minus119887
21205822) Then its first intersection with the sepa-
rating hyperplane (if it exists) is determined by
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(22)
Proof Using Lemma 8 imposing that 11990921= minus11988721205822 we get
11990922=
1198872
1205722 + 1205732[(119872 exp (120572119905) cos (120573119905 minus 120593) minus 120572)
+ 119894 (119872 exp (120572119905) sin (120573119905 minus 120593) + 120573)] (23)
Lemma 10 Let one assume that a finite periodic orbit existsThen
119860+1205741= minus119860minus1198861 (24)
where119860+ and119860minus are the enclosed areas in the right and the leftside respectively
Proof An analogous result is proved in [16] by means ofGreenrsquos formula Alternatively here we follow the approachin [17] Let us consider the following continuous energyfunction
119864minus=1
2(11988621199091+ 1198872)2minus1
21199092
2if 1199091le 0
119864+=1
2(12057421199091+ 1198872)2minus1
21199092
2if 1199091ge 0
(25)
If we consider the following energy piecewise functionthe change in energy Δ119864 along a periodic orbit must be nullHence
0 = Δ119864 = 119864+(0 119909119898
2) minus 119864+(0 119909119872
2)
+ 119864minus(0 119909119872
2) minus 119864minus(0 119909119898
2)
= int
119909119898
2
119909119872
2
119889119864+
1198891199092
1198891199092+ int
119909119872
2
119909119898
2
119889119864minus
1198891199092
1198891199092
(26)
where 1199091198722
and 1199091198982are the top and the bottom intersections
with the separating hyperplane respectivelyBut (25) implies
119889119864+
1198891199092
= (12057421199091+ 1198872)1198891199091
1198891199092
minus 1199092
(27)
and from the equations of the bimodal system we have
1198891199091
1198891199092
=12057411199091+ 1199092
12057421199091+ 1198872
(28)
so
119889119864+
1198891199092
= 12057411199091 (29)
And the first integral can be computed by
int
119909119898
2
119909119872
2
119889119864+
1198891199092
1198891199092= minus1205741119860+ (30)
where 119860+ is the enclosed areas in the right side And
analogously for the other integralThus Δ119864 = 0 if and only if
119860+1205741= minus119860minus1198861 (31)
Proof of Theorem 7 (1)(b) (2)(b) For 1198861= 1205741= 0 it is
obvious that we have a saddlecenter (119886 not considered case)being both subsystems symmetric with regard to the axis
6 Mathematical Problems in Engineering
1199092
= 0 Then we have a homoclinic orbit (the firstintersection with 119909
1= 0 of the orbit passing through
(0 minus11988721205822) is just (0 minus119887
21205821)) and all the orbits inside it are
finite periodic orbitsIt is also clear that if 120574
1increases (being 119886
1= 0) then the
orbit passing through (0 minus11988721205822) cuts the axis 119909
1= 0 below
(0 minus11988721205821) (notice that the spirals become divergent and the
equilibrium point descends) So the homoclinic and the finiteperiodic orbits disappear
(1)(a) (2)(a) If in addition 1198861increases then the point
(0 minus11988721205821) ascends
(1)(c) Using Lemma 9 imposing that its first intersectionwith the separating hyperplane cuts at (0 minus119887
21205821)
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(32)
being
1198872
1205722 + 1205732(119872 exp (120572119905) cos (120573119905 minus 120593) minus 120572) = minus
1198872
1205821
(33)
we get
119905 =1
1205741
ln(1205822
2
1205822
1
1205822
1minus 12057411205821minus 1205742
1205822
2minus 12057411205822minus 1205742
) (34)
Moreover for the existence of the homoclinic orbit it mustbe verified that
1205822
2
1205822
1
1205822
1minus 1205741198671205821minus 1205742
1205822
2minus 1205741198671205822minus 1205742
gt 1 (35)
which is equivalent to
12057411986711988621205822minus 12057421205822
2gt 12057411986711988621205821minus 12057421205822
1(36)
and from it we get
120574119867gt11988611205742
1198862
(37)
(2)(c) For 0 lt 1205741lt 120574119867 we claim that there is at least a stable
limit cycleThe first step is to show that a periodic solution exists
We use the classical argument of Poincare (as eg in [17])Consider a trajectory that starts at height 119909
2on the right
side of the separating hyperplane crosses to the left sideand intersects the left side of the same hyperplane at somenew height 119875(119909
2) The mapping from 119909
2to 119875(119909
2) is called
the Poincare map It tells us how the height of a trajectorychanges after one lap If we can show that there is a point119909lowast
2such that 119875(119909lowast
2) = 119909
lowast
2 then the corresponding trajectory
will be a periodic orbit and it is stable if |1198751015840(1199092)| lt 1 Being
linear both subsystems 119875(1199092) can be easily computed See
for example Figure 1 In order to show that such a 119909lowast2must
exist it is sufficient to know what the graph of 119875(1199092) looks
like roughlyLet us consider 0 le 119909
2le minus119887
21205822 For 119909
2= 0
we have the unique tangency trajectory so that the first
0 01 02 03 04 050
01
02
03
04
05
Figure 1 Distances between original and Poincare image pointsIntersection with the bisectrix corresponds to the stable limit cycleParameter values are the ones used for Example (1)
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 2 Appearance of a finite periodic orbit in case 3 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1
intersection with the separating line is under (0 0) and finally119875(0) gt 0 On the other hand for 119909
2= minus11988721205822 the first
intersection is upper (0 minus11988721205821) (recall 120574
1lt 120574119867) so that
119875(minus11988721205822) lt minus119887
21205822 Furthermore 119875(119909
2) is a continuous
function (from the theorem about the dependence of thesolutions on initial conditions) and indeed it is a smooth andmonotonic function (if not two trajectories would cross) Soby the intermediate value theorem the graph of 119875(119909
2) must
cross the bisectrix somewhere that intersection is our desired119909lowast
2We must exclude the possibility that 119875(119909
2) equiv 119909
2on
some interval in which case there would be a band ofinfinitelymany closed orbits If it happens Lemma 10 ensuresthat 119860+119860minus is constant (= minus119886
11205741) in this interval but
being119860+ 119860minus analytic functions the quotient will be constanteverywhere which is obviously false (eg when 119909
2rarr 0)
Finally as 119875(119909lowast2) = 119909
lowast
2is an isolated crossing and 119875(119909lowast
2)
is monotonic increasing then 0 lt 1198751015840(1199092) lt 1 so that the
periodic orbit is an attractor orbit
Mathematical Problems in Engineering 7
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 3 Appearance of a homoclinic orbit in case 3 1198861= minus1 119886
2=
1 1205741= 120574119867= 0742 120574
2= minus5 and 119887
2= 1
Other values 1199092verifying 119875(119909
2) = 1199092can appear But the
above reasoning shows that the possibility that 119875(1199092) equiv 1199092on
some interval is excluded so that the corresponding periodicorbit is again hyperbolic
Corollary 11 The systems in Theorem 7 with 1198861lt 0 and 0 lt
1205741lt 120574119867are structurally stable
Bifurcations appear for
(i) 1198861lt 0 120574
1= 120574119867 homoclinic orbit
(ii) 1198861lt 0 120574
1= 0 nonhyperbolic finite periodic orbits
(iii) 1198861= 0 1205741= 0 both kinds of orbits
Proof The existence of a periodic orbit implies that (3)(c)in Corollary 4 is verified Hence this case verifies all theconditions in that corollary
Examples (1)We show the structurally stable case 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1 in Figure 2 We
plot the phase portrait corresponding to the Poincare mapon the section 119909 = 0 for different initial points for each ofthem the orbits are integrated until the next oriented cutThe continuous lines correspond to inward spiraling orbitsand the discontinuous lines to outward spiraling ones Ahyperbolic finite periodic orbit exists between them
(2) Bifurcations are as follows
(i) homoclinic orbit (Figure 3) 1198861= minus1 119886
2= 1 120574
1= 120574119867
1205742= minus5 and 119887
2= 1
(ii) nonhyperbolic periodic orbits (Figure 4) 1198861= minus1
1198862= 1 1205741= 0 1205742= minus5 and 119887
2= 1
(iii) both kinds of orbits (Figure 5) 1198861= 0 119886
2= 1 120574
1= 0
1205742= minus5 and 119887
2= 1
Remark 12 In [12] some partial results for 1205741lt 0 and 120574
1gt 120574119867
have been presented
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
minus02 minus01 0 01 02 03 04 05 06
Figure 4 Appearance of nonhyperbolic periodic orbits in case 31198861= minus1 119886
2= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08
15
1
05
0
minus05
minus1
minus15
Figure 5 Appearance of both kinds of singularities in case 3 1198861= 0
1198862= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank Professor Rafael Ramirez for many helpfuldiscussions during the preparation of the paper This paperis supported by DGICYTMTM2011-23892 (Josep Ferrer andMarta Pena) and TIN2013-47137-C2-1-P (Antoni Susın)
References
[1] J C Artes J Llibre J C Medrado and M A TeixeiraldquoPiecewise linear differential systems with two real saddlesrdquoMathematics and Computers in Simulation vol 95 pp 13ndash222014
8 Mathematical Problems in Engineering
[2] K Camlibel M Heemels and H Schumacher ldquoStability andcontrollability of planar bimodal linear complementarity sys-temsrdquo in Proceedings of the 42nd IEEE Conference on Decisionand Control pp 1651ndash1656 December 2003
[3] K Camlibel M Heemels and H Schumacher ldquoOn the con-trollability of bimodal piecewise linear systemsrdquo in HybridSystems Computation and Control vol 2993 of Lecture Notesin Computer Science pp 250ndash264 Springer Berlin Germany2004
[4] M K Camlibel W P M H Heemels and J M SchumacherldquoA full characterization of stabilizability of bimodal piecewiselinear systems with scalar inputsrdquoAutomatica vol 44 no 5 pp1261ndash1267 2008
[5] V Carmona E Freire E Ponce and F Torres ldquoOn simplifyingand classifying piecewise-linear systemsrdquo IEEE Transactions onCircuits and Systems I Fundamental Theory and Applicationsvol 49 no 5 pp 609ndash620 2002
[6] M di Bernardo D J Pagano and E Ponce ldquoNonhyperbolicboundary equilibrium bifurcations in planar Filippov systemsa case study approachrdquo International Journal of Bifurcation andChaos vol 18 no 5 pp 1377ndash1392 2008
[7] J Ferrer M D Magret andM Pena ldquoBimodal piecewise lineardynamical systems Reduced formsrdquo International Journal ofBifurcation and Chaos vol 20 no 9 pp 2795ndash2808 2010
[8] J Llibre M Ordonez and E Ponce ldquoOn the existence anduniqueness of limit cycles in planar continuous piecewise linearsystems without symmetryrdquo Nonlinear Analysis Real WorldApplications vol 14 no 5 pp 2002ndash2012 2013
[9] R Lum and L O Chua ldquoGeneric properties of continuouspiecewise-linear vector fields in R2rdquo IEEE Transactions onCircuits and Systems vol 38 no 9 pp 1043ndash1066 1991
[10] V I Arnold ldquoOn matrices depending on parametersrdquo UspekhiMatematicheskikh Nauk vol 26 pp 101ndash114 1971
[11] J Sotomayor and R Garcia ldquoStructural stability of piecewise-linear vector fieldsrdquo Journal of Differential Equations vol 192no 2 pp 553ndash565 2003
[12] J Ferrer M Pena and A Susin ldquoTangency-saddle singularitiesof planar bimodal linear systemsrdquo in Proceedings of the Inter-national Conference on Mathematical Models and Methods inApplied Sciences Saint Petersburg Russia September 2014
[13] J Ferrer M Magret and M Pena ldquoDifferentiable families ofplanar bimodal linear control systemsrdquoMathematical Problemsin Engineering vol 2014 Article ID 292813 9 pages 2014
[14] M W Hirsch and S Smale Differential Equations DynamicalSystems and Linear Algebra Academic Press London UK 1974
[15] E Freire E Ponce F Rodrigo and F Torres ldquoBifurcationsets of continuous piecewise linear systems with two zonesrdquoInternational Journal of Bifurcation and Chaos vol 8 no 11 pp2073ndash2097 1998
[16] J Llibre and J Sotomayor ldquoPhase portraits of planar controlsystemsrdquoNonlinear Analysis Theory Methods and Applicationsvol 27 no 10 pp 1177ndash1197 1996
[17] S H Strogatz Nonlinear Dynamics and Chaos Perseus Books2000
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
If we denote by ( 1205821 0119886211205822
) the reduced matrix then weidentify critical points classification as shown in Table 1
For the particular case of BLDS the general conditionsin [11] in order to be structurally stable can be simplified asfollows
Corollary 4 A planar BLDS is structurally stable if and onlyif the following conditions hold
(1) Singularities conditions
(a) all its singularities at infinity are disjoint from theseparating axis
(b) all its singularities at infinity are hyperbolic(c) all its finite singularities are disjoint from the
separating axis(d) all its finite singularities are hyperbolic(e) all its tangencies with the separating axis are
isolated
(2) Periodic orbits conditions
(a) all its finite periodic orbits are not tangent to theseparating axis
(b) all its finite periodic orbits are hyperbolic(c) the infinite periodic orbit at infinity is hyperbolic
(3) There are no finite orbits which joint either
(a) two different saddle points (ldquosaddle-saddleorbitsrdquo)
(b) a saddle point with itself (ldquosaddle-loop orbitsrdquo orldquohomoclinic orbitsrdquo)
(c) a saddle point and a tangency (ldquosaddle-tangencyorbitsrdquo)
We will specify these conditions for a triplet of matricesdefining a planar BLDS We begin with conditions (1)(a) and(1)(c) in Corollary 4
Lemma 5 The triplets of matrices representing a structurallystable planar BLDS can be reduced to the form
1198601= (
11988611
11988620) 119860
2= (
12057411
12057420)
119861 = (0
1198872
) 1198872
= 0
(4)
Proof Given a planar BLDS defined by a triplet (1198601 1198602 119861)
such as
1198601= (
11988611198863
11988621198864
) 1198602= (
12057411198863
12057421198864
) 119861 = (1198871
1198872
) (5)
the condition (1)(a) in Corollary 4 is equivalent to
(11988611198863
11988621198864
)(0
1) = 120582 (
0
1) (6)
which gives 1198863
= 0 As it is proved in [13] when 1198863
= 0 bymeans of a suitable admissible basis change the triplet can bereduced to
(11988611
11988620) (
12057411
12057420) (
1198871
1198872
) (7)
Moreover by means of the translation 1199092= 1199092+1198871 we obtain
(11988611
11988620) (
12057411
12057420) (
0
1198872
) (8)
Then the condition (1)(c) in Corollary 4 is equivalent to
(11988611
11988620)(
0
1199092119890
) + (0
1198872
) = (0
0) (9)
which gives 1198872
= 0
Now we apply the remaining conditions in Corollary 4
Theorem 6 Let one consider a planar BLDS as in Lemma 5
(1) The only tangency (ie 1(0 1199092) = 0) is the origin
(0 0)(2) If one of the subsystems is a center a degenerate node or
a starred node then the BLDS is not structurally stableMore in general the only BLDS verifying (1)(a) (1)(c)and (1)(d) in Corollary 4 are those in Table 2
(3) The cases 1 2 4 5 6 8 9 10 12 13 14 and 16(those where none of the subsystems is a real spiral) arestructurally stable
(4) In case 3 it is structurally stable if and only if
(a) the finite periodic orbits are hyperbolic(b) there are no saddle-loop orbits(c) there are no finite orbits connecting a saddle and
a tangency point
(5) In the cases 7 11 and 15 the BLDS is structurally stableif and only if the above condition (4)(a) holds
Proof We proceed with the same order for the proof
(1) Clearly 1(0 1199092) = 0 implies 119909
2= 0
(2) Starred nodes have been excluded by (1)(a) The con-dition (1)(d) excludes degenerate nodes and centersthat is to say for 119894 = 1 2
det119860119894= 0
if det119860119894gt 0 then trace119860
119894= 0
(10)
Therefore the subsystems have a unique equilibriumpoint
(minus1198872
1198862
1198861
1198872
1198862
) (minus1198872
1205742
1205741
1198872
1205742
) (11)
4 Mathematical Problems in Engineering
Table 2 Enumeration of the possible cases
Subsystem 1Subsystem 2 Virtual saddle Real node Real spiral Real improper nodeReal saddle 1 (119887
2gt 0) 2 (119887
2gt 0) 3 (119887
2gt 0) 4 (119887
2gt 0)
Virtual node 5 (1198872lt 0) 6 (119887
2gt 0) 7 (119887
2gt 0) 8 (119887
2gt 0)
Virtual spiral 9 (1198872lt 0) 10 (119887
2lt 0) 11 (119887
2gt 0) 12 (119887
2gt 0)
Virtual improper node 13 (1198872lt 0) 14 (119887
2lt 0) 15 (119887
2lt 0) 16 (119887
2gt 0)
But not all combinations (realvirtual) are possibleFor example let us assume a real saddle as subsystem1 (ie 119886
2gt 0 and 119887
2gt 0) Then the subsystem 2 must
be for 1205742gt 0 a virtual saddle and for 120574
2lt 0 a real
node a real improper node or a real spiral They arethe cases 1 2 4 and 3 respectively Analogously forthe remainder cases of the table
(3) As starred nodes and degenerate nodes are excludedall the BLDS in Table 2 satisfy condition (1)(b)in Corollary 4 Moreover the feature that the onlytangency point is the origin implies the conditions(1)(e) and (2)(a) (we notice that centers are excluded)Concerning (2)(c) it is clear that only in the case 11there exists infinite periodic orbit at infinity and thatit is hyperbolic (its character of attractingrepellingdepends on the signs of the real and imaginary part ofthe complex eigenvalues) Obviously condition (3)(a)makes no sense in Table 2Again the remaining conditions (2)(b) (3)(b) and(3)(c) make no sense in the cases listed in point 3 ofTheorem 6 so that they are structurally stable
(4) On the other hand they must be verified in case 3 weadapt them to (a) (b) and (c) in point 4 ofTheorem 6
(5) Finally in the cases in point 5 only (a) must beverified because again (b) and (c) make no sense
4 Structurally Stable Planar BLDSSpecific Studies
Theorem 6 collects the conclusions of applying to planarBLDS the general criteria in [11] for a piecewise linear systemto be structurally stable Nevertheless cases 3 7 11 and 15need additional specific studies For example see in [15 16]partial results concerning case 7 In this section we focus onconditions (a) and (b) of case 3 for divergent spirals leavingthe remaining cases for future works
Thus let us assume a BLDS as in Lemma 5 verifying thefollowing
(i) The left subsystem is a real saddle that is 1198862
gt
0 1198872
gt 0 In particular its equilibrium point is(minus11988721198862 1198861(11988721198862)) and the invariant manifold cuts
the separating line at (0 minus11988721205822) and (0 minus119887
21205821)
where 1205822lt 0 lt 120582
1are the eigenvalues of 119860
1
(Consider 1205821+ 1205822= 1198861 12058211205822= minus1198862)
(ii) The right subsystem is a real divergent spiral thatis 1205741gt 0 120574
2lt 0 and 1205742
1lt minus4120574
2 In particular
its equilibrium point is (minus11988721205742 1205741(11988721205742)) We write
120572 plusmn 119894120573 120573 gt 0 the eigenvalues of 1198602 (Consider
2120572 = 1205741 1205722 + 1205732 = minus120574
2)
Theorem 7 As above let one assume
1198872gt 0 119886
2gt 0 120574
1gt 0
1205742lt 0 120574
2
1lt minus4120574
2
(12)
and let
1205822lt 0 lt 120582
1119905ℎ119890 119890119894119892119890119899V119886119897119906119890119904 119900119891 119860
1
120572 plusmn 119894120573 120573 gt 0 119905ℎ119890 119890119894119892119890119899V119886119897119906119890119904 119900119891 1198602
(13)
In addition let119872 gt 0 and 0 lt 120593 lt 120587 defined by
119872 cos (120593) = 120572 minus1205722+ 1205732
1205822
119872 sin (120593) = 120573 (14)
Then consider the following
(1)
(a) If 1198861gt 0 then there is no homoclinic orbit
(b) If 1198861= 0 then there is a homoclinic orbit only for
1205741= 0 which is not a considered case
(c) If 1198861lt 0 the only homoclinic (ie saddle-loop)
orbit appears for the value 120574119867of 1205741verifying
119905 =1
1205741
ln(1205822
2
1205822
1
1205822
1minus 12057411205821minus 1205742
1205822
2minus 12057411205822minus 1205742
) (15)
being
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(16)
Moreover 120574119867gt 119886112057421198862
(2)
(a) If 1198861gt 0 then there are no finite periodic orbits
(b) If 1198861= 0 then there are finite periodic orbits (all
of them) only for 1205741= 0 which is not a considered
case(c) If 119886
1lt 0 at least a finite periodic orbit appears
for 0 lt 1205741lt 120574119867 all of the finite periodic orbits
being hyperbolic and disjoint from the tangencypoints No saddle-tangency orbits appear
Mathematical Problems in Engineering 5
The proof is based on the following lemmas
Lemma 8 A spiral cuts 1199091= 0 in 119909
21and 119909
22 if and only if
exp (120583119905) =1198872+ 12058311990922
1198872+ 12058311990921
(17)
where 120583 = 120572 + 119894120573
Proof The solution of the system for the spiral is
(1199091(119905)
1199092(119905)) = (
120583 120583
12057421205742
)(exp (120583119905) 0
0 exp (120583119905))(120583 120583
12057421205742
)
minus1
times(
1199091(0) +
1198872
1205742
1199092(0) minus 120574
1
1198872
1205742
)+(
minus1198872
1205742
1205741
1198872
1205742
)
(18)
where 120583 is the conjugate of the eigenvalue 120583Considering that the starting and final point have 119909
1= 0
and denoting 1199092(0) = 119909
21and 119909
2(119905) = 119909
22 we get
1205742(120583 minus 120583)(
1198872
1205742
11990922minus 1205741
1198872
1205742
)
= (120583 exp (120583119905) 120583 exp (120583119905)1205742exp (120583119905) 120574
2exp (120583119905))(
1198872minus 120583(119909
21minus 1205741
1198872
1205742
)
minus1198872+ 120583(119909
21minus 1205741
1198872
1205742
)
)
(19)
Multiplying both sides of the system by (1205742 minus120583) we obtain
exp (120583119905) =1198872minus 12058311990922+ 1205831205741(11988721205742)
1198872minus 12058311990921+ 1205831205741(11988721205742)
(20)
which is equivalent to
exp (120583119905) =1198872+ 12058311990922
1198872+ 12058311990921
(21)
Lemma 9 Let one consider the saddle-spiral orbit passingthrough (0 minus119887
21205822) Then its first intersection with the sepa-
rating hyperplane (if it exists) is determined by
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(22)
Proof Using Lemma 8 imposing that 11990921= minus11988721205822 we get
11990922=
1198872
1205722 + 1205732[(119872 exp (120572119905) cos (120573119905 minus 120593) minus 120572)
+ 119894 (119872 exp (120572119905) sin (120573119905 minus 120593) + 120573)] (23)
Lemma 10 Let one assume that a finite periodic orbit existsThen
119860+1205741= minus119860minus1198861 (24)
where119860+ and119860minus are the enclosed areas in the right and the leftside respectively
Proof An analogous result is proved in [16] by means ofGreenrsquos formula Alternatively here we follow the approachin [17] Let us consider the following continuous energyfunction
119864minus=1
2(11988621199091+ 1198872)2minus1
21199092
2if 1199091le 0
119864+=1
2(12057421199091+ 1198872)2minus1
21199092
2if 1199091ge 0
(25)
If we consider the following energy piecewise functionthe change in energy Δ119864 along a periodic orbit must be nullHence
0 = Δ119864 = 119864+(0 119909119898
2) minus 119864+(0 119909119872
2)
+ 119864minus(0 119909119872
2) minus 119864minus(0 119909119898
2)
= int
119909119898
2
119909119872
2
119889119864+
1198891199092
1198891199092+ int
119909119872
2
119909119898
2
119889119864minus
1198891199092
1198891199092
(26)
where 1199091198722
and 1199091198982are the top and the bottom intersections
with the separating hyperplane respectivelyBut (25) implies
119889119864+
1198891199092
= (12057421199091+ 1198872)1198891199091
1198891199092
minus 1199092
(27)
and from the equations of the bimodal system we have
1198891199091
1198891199092
=12057411199091+ 1199092
12057421199091+ 1198872
(28)
so
119889119864+
1198891199092
= 12057411199091 (29)
And the first integral can be computed by
int
119909119898
2
119909119872
2
119889119864+
1198891199092
1198891199092= minus1205741119860+ (30)
where 119860+ is the enclosed areas in the right side And
analogously for the other integralThus Δ119864 = 0 if and only if
119860+1205741= minus119860minus1198861 (31)
Proof of Theorem 7 (1)(b) (2)(b) For 1198861= 1205741= 0 it is
obvious that we have a saddlecenter (119886 not considered case)being both subsystems symmetric with regard to the axis
6 Mathematical Problems in Engineering
1199092
= 0 Then we have a homoclinic orbit (the firstintersection with 119909
1= 0 of the orbit passing through
(0 minus11988721205822) is just (0 minus119887
21205821)) and all the orbits inside it are
finite periodic orbitsIt is also clear that if 120574
1increases (being 119886
1= 0) then the
orbit passing through (0 minus11988721205822) cuts the axis 119909
1= 0 below
(0 minus11988721205821) (notice that the spirals become divergent and the
equilibrium point descends) So the homoclinic and the finiteperiodic orbits disappear
(1)(a) (2)(a) If in addition 1198861increases then the point
(0 minus11988721205821) ascends
(1)(c) Using Lemma 9 imposing that its first intersectionwith the separating hyperplane cuts at (0 minus119887
21205821)
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(32)
being
1198872
1205722 + 1205732(119872 exp (120572119905) cos (120573119905 minus 120593) minus 120572) = minus
1198872
1205821
(33)
we get
119905 =1
1205741
ln(1205822
2
1205822
1
1205822
1minus 12057411205821minus 1205742
1205822
2minus 12057411205822minus 1205742
) (34)
Moreover for the existence of the homoclinic orbit it mustbe verified that
1205822
2
1205822
1
1205822
1minus 1205741198671205821minus 1205742
1205822
2minus 1205741198671205822minus 1205742
gt 1 (35)
which is equivalent to
12057411986711988621205822minus 12057421205822
2gt 12057411986711988621205821minus 12057421205822
1(36)
and from it we get
120574119867gt11988611205742
1198862
(37)
(2)(c) For 0 lt 1205741lt 120574119867 we claim that there is at least a stable
limit cycleThe first step is to show that a periodic solution exists
We use the classical argument of Poincare (as eg in [17])Consider a trajectory that starts at height 119909
2on the right
side of the separating hyperplane crosses to the left sideand intersects the left side of the same hyperplane at somenew height 119875(119909
2) The mapping from 119909
2to 119875(119909
2) is called
the Poincare map It tells us how the height of a trajectorychanges after one lap If we can show that there is a point119909lowast
2such that 119875(119909lowast
2) = 119909
lowast
2 then the corresponding trajectory
will be a periodic orbit and it is stable if |1198751015840(1199092)| lt 1 Being
linear both subsystems 119875(1199092) can be easily computed See
for example Figure 1 In order to show that such a 119909lowast2must
exist it is sufficient to know what the graph of 119875(1199092) looks
like roughlyLet us consider 0 le 119909
2le minus119887
21205822 For 119909
2= 0
we have the unique tangency trajectory so that the first
0 01 02 03 04 050
01
02
03
04
05
Figure 1 Distances between original and Poincare image pointsIntersection with the bisectrix corresponds to the stable limit cycleParameter values are the ones used for Example (1)
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 2 Appearance of a finite periodic orbit in case 3 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1
intersection with the separating line is under (0 0) and finally119875(0) gt 0 On the other hand for 119909
2= minus11988721205822 the first
intersection is upper (0 minus11988721205821) (recall 120574
1lt 120574119867) so that
119875(minus11988721205822) lt minus119887
21205822 Furthermore 119875(119909
2) is a continuous
function (from the theorem about the dependence of thesolutions on initial conditions) and indeed it is a smooth andmonotonic function (if not two trajectories would cross) Soby the intermediate value theorem the graph of 119875(119909
2) must
cross the bisectrix somewhere that intersection is our desired119909lowast
2We must exclude the possibility that 119875(119909
2) equiv 119909
2on
some interval in which case there would be a band ofinfinitelymany closed orbits If it happens Lemma 10 ensuresthat 119860+119860minus is constant (= minus119886
11205741) in this interval but
being119860+ 119860minus analytic functions the quotient will be constanteverywhere which is obviously false (eg when 119909
2rarr 0)
Finally as 119875(119909lowast2) = 119909
lowast
2is an isolated crossing and 119875(119909lowast
2)
is monotonic increasing then 0 lt 1198751015840(1199092) lt 1 so that the
periodic orbit is an attractor orbit
Mathematical Problems in Engineering 7
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 3 Appearance of a homoclinic orbit in case 3 1198861= minus1 119886
2=
1 1205741= 120574119867= 0742 120574
2= minus5 and 119887
2= 1
Other values 1199092verifying 119875(119909
2) = 1199092can appear But the
above reasoning shows that the possibility that 119875(1199092) equiv 1199092on
some interval is excluded so that the corresponding periodicorbit is again hyperbolic
Corollary 11 The systems in Theorem 7 with 1198861lt 0 and 0 lt
1205741lt 120574119867are structurally stable
Bifurcations appear for
(i) 1198861lt 0 120574
1= 120574119867 homoclinic orbit
(ii) 1198861lt 0 120574
1= 0 nonhyperbolic finite periodic orbits
(iii) 1198861= 0 1205741= 0 both kinds of orbits
Proof The existence of a periodic orbit implies that (3)(c)in Corollary 4 is verified Hence this case verifies all theconditions in that corollary
Examples (1)We show the structurally stable case 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1 in Figure 2 We
plot the phase portrait corresponding to the Poincare mapon the section 119909 = 0 for different initial points for each ofthem the orbits are integrated until the next oriented cutThe continuous lines correspond to inward spiraling orbitsand the discontinuous lines to outward spiraling ones Ahyperbolic finite periodic orbit exists between them
(2) Bifurcations are as follows
(i) homoclinic orbit (Figure 3) 1198861= minus1 119886
2= 1 120574
1= 120574119867
1205742= minus5 and 119887
2= 1
(ii) nonhyperbolic periodic orbits (Figure 4) 1198861= minus1
1198862= 1 1205741= 0 1205742= minus5 and 119887
2= 1
(iii) both kinds of orbits (Figure 5) 1198861= 0 119886
2= 1 120574
1= 0
1205742= minus5 and 119887
2= 1
Remark 12 In [12] some partial results for 1205741lt 0 and 120574
1gt 120574119867
have been presented
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
minus02 minus01 0 01 02 03 04 05 06
Figure 4 Appearance of nonhyperbolic periodic orbits in case 31198861= minus1 119886
2= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08
15
1
05
0
minus05
minus1
minus15
Figure 5 Appearance of both kinds of singularities in case 3 1198861= 0
1198862= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank Professor Rafael Ramirez for many helpfuldiscussions during the preparation of the paper This paperis supported by DGICYTMTM2011-23892 (Josep Ferrer andMarta Pena) and TIN2013-47137-C2-1-P (Antoni Susın)
References
[1] J C Artes J Llibre J C Medrado and M A TeixeiraldquoPiecewise linear differential systems with two real saddlesrdquoMathematics and Computers in Simulation vol 95 pp 13ndash222014
8 Mathematical Problems in Engineering
[2] K Camlibel M Heemels and H Schumacher ldquoStability andcontrollability of planar bimodal linear complementarity sys-temsrdquo in Proceedings of the 42nd IEEE Conference on Decisionand Control pp 1651ndash1656 December 2003
[3] K Camlibel M Heemels and H Schumacher ldquoOn the con-trollability of bimodal piecewise linear systemsrdquo in HybridSystems Computation and Control vol 2993 of Lecture Notesin Computer Science pp 250ndash264 Springer Berlin Germany2004
[4] M K Camlibel W P M H Heemels and J M SchumacherldquoA full characterization of stabilizability of bimodal piecewiselinear systems with scalar inputsrdquoAutomatica vol 44 no 5 pp1261ndash1267 2008
[5] V Carmona E Freire E Ponce and F Torres ldquoOn simplifyingand classifying piecewise-linear systemsrdquo IEEE Transactions onCircuits and Systems I Fundamental Theory and Applicationsvol 49 no 5 pp 609ndash620 2002
[6] M di Bernardo D J Pagano and E Ponce ldquoNonhyperbolicboundary equilibrium bifurcations in planar Filippov systemsa case study approachrdquo International Journal of Bifurcation andChaos vol 18 no 5 pp 1377ndash1392 2008
[7] J Ferrer M D Magret andM Pena ldquoBimodal piecewise lineardynamical systems Reduced formsrdquo International Journal ofBifurcation and Chaos vol 20 no 9 pp 2795ndash2808 2010
[8] J Llibre M Ordonez and E Ponce ldquoOn the existence anduniqueness of limit cycles in planar continuous piecewise linearsystems without symmetryrdquo Nonlinear Analysis Real WorldApplications vol 14 no 5 pp 2002ndash2012 2013
[9] R Lum and L O Chua ldquoGeneric properties of continuouspiecewise-linear vector fields in R2rdquo IEEE Transactions onCircuits and Systems vol 38 no 9 pp 1043ndash1066 1991
[10] V I Arnold ldquoOn matrices depending on parametersrdquo UspekhiMatematicheskikh Nauk vol 26 pp 101ndash114 1971
[11] J Sotomayor and R Garcia ldquoStructural stability of piecewise-linear vector fieldsrdquo Journal of Differential Equations vol 192no 2 pp 553ndash565 2003
[12] J Ferrer M Pena and A Susin ldquoTangency-saddle singularitiesof planar bimodal linear systemsrdquo in Proceedings of the Inter-national Conference on Mathematical Models and Methods inApplied Sciences Saint Petersburg Russia September 2014
[13] J Ferrer M Magret and M Pena ldquoDifferentiable families ofplanar bimodal linear control systemsrdquoMathematical Problemsin Engineering vol 2014 Article ID 292813 9 pages 2014
[14] M W Hirsch and S Smale Differential Equations DynamicalSystems and Linear Algebra Academic Press London UK 1974
[15] E Freire E Ponce F Rodrigo and F Torres ldquoBifurcationsets of continuous piecewise linear systems with two zonesrdquoInternational Journal of Bifurcation and Chaos vol 8 no 11 pp2073ndash2097 1998
[16] J Llibre and J Sotomayor ldquoPhase portraits of planar controlsystemsrdquoNonlinear Analysis Theory Methods and Applicationsvol 27 no 10 pp 1177ndash1197 1996
[17] S H Strogatz Nonlinear Dynamics and Chaos Perseus Books2000
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Table 2 Enumeration of the possible cases
Subsystem 1Subsystem 2 Virtual saddle Real node Real spiral Real improper nodeReal saddle 1 (119887
2gt 0) 2 (119887
2gt 0) 3 (119887
2gt 0) 4 (119887
2gt 0)
Virtual node 5 (1198872lt 0) 6 (119887
2gt 0) 7 (119887
2gt 0) 8 (119887
2gt 0)
Virtual spiral 9 (1198872lt 0) 10 (119887
2lt 0) 11 (119887
2gt 0) 12 (119887
2gt 0)
Virtual improper node 13 (1198872lt 0) 14 (119887
2lt 0) 15 (119887
2lt 0) 16 (119887
2gt 0)
But not all combinations (realvirtual) are possibleFor example let us assume a real saddle as subsystem1 (ie 119886
2gt 0 and 119887
2gt 0) Then the subsystem 2 must
be for 1205742gt 0 a virtual saddle and for 120574
2lt 0 a real
node a real improper node or a real spiral They arethe cases 1 2 4 and 3 respectively Analogously forthe remainder cases of the table
(3) As starred nodes and degenerate nodes are excludedall the BLDS in Table 2 satisfy condition (1)(b)in Corollary 4 Moreover the feature that the onlytangency point is the origin implies the conditions(1)(e) and (2)(a) (we notice that centers are excluded)Concerning (2)(c) it is clear that only in the case 11there exists infinite periodic orbit at infinity and thatit is hyperbolic (its character of attractingrepellingdepends on the signs of the real and imaginary part ofthe complex eigenvalues) Obviously condition (3)(a)makes no sense in Table 2Again the remaining conditions (2)(b) (3)(b) and(3)(c) make no sense in the cases listed in point 3 ofTheorem 6 so that they are structurally stable
(4) On the other hand they must be verified in case 3 weadapt them to (a) (b) and (c) in point 4 ofTheorem 6
(5) Finally in the cases in point 5 only (a) must beverified because again (b) and (c) make no sense
4 Structurally Stable Planar BLDSSpecific Studies
Theorem 6 collects the conclusions of applying to planarBLDS the general criteria in [11] for a piecewise linear systemto be structurally stable Nevertheless cases 3 7 11 and 15need additional specific studies For example see in [15 16]partial results concerning case 7 In this section we focus onconditions (a) and (b) of case 3 for divergent spirals leavingthe remaining cases for future works
Thus let us assume a BLDS as in Lemma 5 verifying thefollowing
(i) The left subsystem is a real saddle that is 1198862
gt
0 1198872
gt 0 In particular its equilibrium point is(minus11988721198862 1198861(11988721198862)) and the invariant manifold cuts
the separating line at (0 minus11988721205822) and (0 minus119887
21205821)
where 1205822lt 0 lt 120582
1are the eigenvalues of 119860
1
(Consider 1205821+ 1205822= 1198861 12058211205822= minus1198862)
(ii) The right subsystem is a real divergent spiral thatis 1205741gt 0 120574
2lt 0 and 1205742
1lt minus4120574
2 In particular
its equilibrium point is (minus11988721205742 1205741(11988721205742)) We write
120572 plusmn 119894120573 120573 gt 0 the eigenvalues of 1198602 (Consider
2120572 = 1205741 1205722 + 1205732 = minus120574
2)
Theorem 7 As above let one assume
1198872gt 0 119886
2gt 0 120574
1gt 0
1205742lt 0 120574
2
1lt minus4120574
2
(12)
and let
1205822lt 0 lt 120582
1119905ℎ119890 119890119894119892119890119899V119886119897119906119890119904 119900119891 119860
1
120572 plusmn 119894120573 120573 gt 0 119905ℎ119890 119890119894119892119890119899V119886119897119906119890119904 119900119891 1198602
(13)
In addition let119872 gt 0 and 0 lt 120593 lt 120587 defined by
119872 cos (120593) = 120572 minus1205722+ 1205732
1205822
119872 sin (120593) = 120573 (14)
Then consider the following
(1)
(a) If 1198861gt 0 then there is no homoclinic orbit
(b) If 1198861= 0 then there is a homoclinic orbit only for
1205741= 0 which is not a considered case
(c) If 1198861lt 0 the only homoclinic (ie saddle-loop)
orbit appears for the value 120574119867of 1205741verifying
119905 =1
1205741
ln(1205822
2
1205822
1
1205822
1minus 12057411205821minus 1205742
1205822
2minus 12057411205822minus 1205742
) (15)
being
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(16)
Moreover 120574119867gt 119886112057421198862
(2)
(a) If 1198861gt 0 then there are no finite periodic orbits
(b) If 1198861= 0 then there are finite periodic orbits (all
of them) only for 1205741= 0 which is not a considered
case(c) If 119886
1lt 0 at least a finite periodic orbit appears
for 0 lt 1205741lt 120574119867 all of the finite periodic orbits
being hyperbolic and disjoint from the tangencypoints No saddle-tangency orbits appear
Mathematical Problems in Engineering 5
The proof is based on the following lemmas
Lemma 8 A spiral cuts 1199091= 0 in 119909
21and 119909
22 if and only if
exp (120583119905) =1198872+ 12058311990922
1198872+ 12058311990921
(17)
where 120583 = 120572 + 119894120573
Proof The solution of the system for the spiral is
(1199091(119905)
1199092(119905)) = (
120583 120583
12057421205742
)(exp (120583119905) 0
0 exp (120583119905))(120583 120583
12057421205742
)
minus1
times(
1199091(0) +
1198872
1205742
1199092(0) minus 120574
1
1198872
1205742
)+(
minus1198872
1205742
1205741
1198872
1205742
)
(18)
where 120583 is the conjugate of the eigenvalue 120583Considering that the starting and final point have 119909
1= 0
and denoting 1199092(0) = 119909
21and 119909
2(119905) = 119909
22 we get
1205742(120583 minus 120583)(
1198872
1205742
11990922minus 1205741
1198872
1205742
)
= (120583 exp (120583119905) 120583 exp (120583119905)1205742exp (120583119905) 120574
2exp (120583119905))(
1198872minus 120583(119909
21minus 1205741
1198872
1205742
)
minus1198872+ 120583(119909
21minus 1205741
1198872
1205742
)
)
(19)
Multiplying both sides of the system by (1205742 minus120583) we obtain
exp (120583119905) =1198872minus 12058311990922+ 1205831205741(11988721205742)
1198872minus 12058311990921+ 1205831205741(11988721205742)
(20)
which is equivalent to
exp (120583119905) =1198872+ 12058311990922
1198872+ 12058311990921
(21)
Lemma 9 Let one consider the saddle-spiral orbit passingthrough (0 minus119887
21205822) Then its first intersection with the sepa-
rating hyperplane (if it exists) is determined by
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(22)
Proof Using Lemma 8 imposing that 11990921= minus11988721205822 we get
11990922=
1198872
1205722 + 1205732[(119872 exp (120572119905) cos (120573119905 minus 120593) minus 120572)
+ 119894 (119872 exp (120572119905) sin (120573119905 minus 120593) + 120573)] (23)
Lemma 10 Let one assume that a finite periodic orbit existsThen
119860+1205741= minus119860minus1198861 (24)
where119860+ and119860minus are the enclosed areas in the right and the leftside respectively
Proof An analogous result is proved in [16] by means ofGreenrsquos formula Alternatively here we follow the approachin [17] Let us consider the following continuous energyfunction
119864minus=1
2(11988621199091+ 1198872)2minus1
21199092
2if 1199091le 0
119864+=1
2(12057421199091+ 1198872)2minus1
21199092
2if 1199091ge 0
(25)
If we consider the following energy piecewise functionthe change in energy Δ119864 along a periodic orbit must be nullHence
0 = Δ119864 = 119864+(0 119909119898
2) minus 119864+(0 119909119872
2)
+ 119864minus(0 119909119872
2) minus 119864minus(0 119909119898
2)
= int
119909119898
2
119909119872
2
119889119864+
1198891199092
1198891199092+ int
119909119872
2
119909119898
2
119889119864minus
1198891199092
1198891199092
(26)
where 1199091198722
and 1199091198982are the top and the bottom intersections
with the separating hyperplane respectivelyBut (25) implies
119889119864+
1198891199092
= (12057421199091+ 1198872)1198891199091
1198891199092
minus 1199092
(27)
and from the equations of the bimodal system we have
1198891199091
1198891199092
=12057411199091+ 1199092
12057421199091+ 1198872
(28)
so
119889119864+
1198891199092
= 12057411199091 (29)
And the first integral can be computed by
int
119909119898
2
119909119872
2
119889119864+
1198891199092
1198891199092= minus1205741119860+ (30)
where 119860+ is the enclosed areas in the right side And
analogously for the other integralThus Δ119864 = 0 if and only if
119860+1205741= minus119860minus1198861 (31)
Proof of Theorem 7 (1)(b) (2)(b) For 1198861= 1205741= 0 it is
obvious that we have a saddlecenter (119886 not considered case)being both subsystems symmetric with regard to the axis
6 Mathematical Problems in Engineering
1199092
= 0 Then we have a homoclinic orbit (the firstintersection with 119909
1= 0 of the orbit passing through
(0 minus11988721205822) is just (0 minus119887
21205821)) and all the orbits inside it are
finite periodic orbitsIt is also clear that if 120574
1increases (being 119886
1= 0) then the
orbit passing through (0 minus11988721205822) cuts the axis 119909
1= 0 below
(0 minus11988721205821) (notice that the spirals become divergent and the
equilibrium point descends) So the homoclinic and the finiteperiodic orbits disappear
(1)(a) (2)(a) If in addition 1198861increases then the point
(0 minus11988721205821) ascends
(1)(c) Using Lemma 9 imposing that its first intersectionwith the separating hyperplane cuts at (0 minus119887
21205821)
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(32)
being
1198872
1205722 + 1205732(119872 exp (120572119905) cos (120573119905 minus 120593) minus 120572) = minus
1198872
1205821
(33)
we get
119905 =1
1205741
ln(1205822
2
1205822
1
1205822
1minus 12057411205821minus 1205742
1205822
2minus 12057411205822minus 1205742
) (34)
Moreover for the existence of the homoclinic orbit it mustbe verified that
1205822
2
1205822
1
1205822
1minus 1205741198671205821minus 1205742
1205822
2minus 1205741198671205822minus 1205742
gt 1 (35)
which is equivalent to
12057411986711988621205822minus 12057421205822
2gt 12057411986711988621205821minus 12057421205822
1(36)
and from it we get
120574119867gt11988611205742
1198862
(37)
(2)(c) For 0 lt 1205741lt 120574119867 we claim that there is at least a stable
limit cycleThe first step is to show that a periodic solution exists
We use the classical argument of Poincare (as eg in [17])Consider a trajectory that starts at height 119909
2on the right
side of the separating hyperplane crosses to the left sideand intersects the left side of the same hyperplane at somenew height 119875(119909
2) The mapping from 119909
2to 119875(119909
2) is called
the Poincare map It tells us how the height of a trajectorychanges after one lap If we can show that there is a point119909lowast
2such that 119875(119909lowast
2) = 119909
lowast
2 then the corresponding trajectory
will be a periodic orbit and it is stable if |1198751015840(1199092)| lt 1 Being
linear both subsystems 119875(1199092) can be easily computed See
for example Figure 1 In order to show that such a 119909lowast2must
exist it is sufficient to know what the graph of 119875(1199092) looks
like roughlyLet us consider 0 le 119909
2le minus119887
21205822 For 119909
2= 0
we have the unique tangency trajectory so that the first
0 01 02 03 04 050
01
02
03
04
05
Figure 1 Distances between original and Poincare image pointsIntersection with the bisectrix corresponds to the stable limit cycleParameter values are the ones used for Example (1)
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 2 Appearance of a finite periodic orbit in case 3 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1
intersection with the separating line is under (0 0) and finally119875(0) gt 0 On the other hand for 119909
2= minus11988721205822 the first
intersection is upper (0 minus11988721205821) (recall 120574
1lt 120574119867) so that
119875(minus11988721205822) lt minus119887
21205822 Furthermore 119875(119909
2) is a continuous
function (from the theorem about the dependence of thesolutions on initial conditions) and indeed it is a smooth andmonotonic function (if not two trajectories would cross) Soby the intermediate value theorem the graph of 119875(119909
2) must
cross the bisectrix somewhere that intersection is our desired119909lowast
2We must exclude the possibility that 119875(119909
2) equiv 119909
2on
some interval in which case there would be a band ofinfinitelymany closed orbits If it happens Lemma 10 ensuresthat 119860+119860minus is constant (= minus119886
11205741) in this interval but
being119860+ 119860minus analytic functions the quotient will be constanteverywhere which is obviously false (eg when 119909
2rarr 0)
Finally as 119875(119909lowast2) = 119909
lowast
2is an isolated crossing and 119875(119909lowast
2)
is monotonic increasing then 0 lt 1198751015840(1199092) lt 1 so that the
periodic orbit is an attractor orbit
Mathematical Problems in Engineering 7
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 3 Appearance of a homoclinic orbit in case 3 1198861= minus1 119886
2=
1 1205741= 120574119867= 0742 120574
2= minus5 and 119887
2= 1
Other values 1199092verifying 119875(119909
2) = 1199092can appear But the
above reasoning shows that the possibility that 119875(1199092) equiv 1199092on
some interval is excluded so that the corresponding periodicorbit is again hyperbolic
Corollary 11 The systems in Theorem 7 with 1198861lt 0 and 0 lt
1205741lt 120574119867are structurally stable
Bifurcations appear for
(i) 1198861lt 0 120574
1= 120574119867 homoclinic orbit
(ii) 1198861lt 0 120574
1= 0 nonhyperbolic finite periodic orbits
(iii) 1198861= 0 1205741= 0 both kinds of orbits
Proof The existence of a periodic orbit implies that (3)(c)in Corollary 4 is verified Hence this case verifies all theconditions in that corollary
Examples (1)We show the structurally stable case 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1 in Figure 2 We
plot the phase portrait corresponding to the Poincare mapon the section 119909 = 0 for different initial points for each ofthem the orbits are integrated until the next oriented cutThe continuous lines correspond to inward spiraling orbitsand the discontinuous lines to outward spiraling ones Ahyperbolic finite periodic orbit exists between them
(2) Bifurcations are as follows
(i) homoclinic orbit (Figure 3) 1198861= minus1 119886
2= 1 120574
1= 120574119867
1205742= minus5 and 119887
2= 1
(ii) nonhyperbolic periodic orbits (Figure 4) 1198861= minus1
1198862= 1 1205741= 0 1205742= minus5 and 119887
2= 1
(iii) both kinds of orbits (Figure 5) 1198861= 0 119886
2= 1 120574
1= 0
1205742= minus5 and 119887
2= 1
Remark 12 In [12] some partial results for 1205741lt 0 and 120574
1gt 120574119867
have been presented
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
minus02 minus01 0 01 02 03 04 05 06
Figure 4 Appearance of nonhyperbolic periodic orbits in case 31198861= minus1 119886
2= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08
15
1
05
0
minus05
minus1
minus15
Figure 5 Appearance of both kinds of singularities in case 3 1198861= 0
1198862= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank Professor Rafael Ramirez for many helpfuldiscussions during the preparation of the paper This paperis supported by DGICYTMTM2011-23892 (Josep Ferrer andMarta Pena) and TIN2013-47137-C2-1-P (Antoni Susın)
References
[1] J C Artes J Llibre J C Medrado and M A TeixeiraldquoPiecewise linear differential systems with two real saddlesrdquoMathematics and Computers in Simulation vol 95 pp 13ndash222014
8 Mathematical Problems in Engineering
[2] K Camlibel M Heemels and H Schumacher ldquoStability andcontrollability of planar bimodal linear complementarity sys-temsrdquo in Proceedings of the 42nd IEEE Conference on Decisionand Control pp 1651ndash1656 December 2003
[3] K Camlibel M Heemels and H Schumacher ldquoOn the con-trollability of bimodal piecewise linear systemsrdquo in HybridSystems Computation and Control vol 2993 of Lecture Notesin Computer Science pp 250ndash264 Springer Berlin Germany2004
[4] M K Camlibel W P M H Heemels and J M SchumacherldquoA full characterization of stabilizability of bimodal piecewiselinear systems with scalar inputsrdquoAutomatica vol 44 no 5 pp1261ndash1267 2008
[5] V Carmona E Freire E Ponce and F Torres ldquoOn simplifyingand classifying piecewise-linear systemsrdquo IEEE Transactions onCircuits and Systems I Fundamental Theory and Applicationsvol 49 no 5 pp 609ndash620 2002
[6] M di Bernardo D J Pagano and E Ponce ldquoNonhyperbolicboundary equilibrium bifurcations in planar Filippov systemsa case study approachrdquo International Journal of Bifurcation andChaos vol 18 no 5 pp 1377ndash1392 2008
[7] J Ferrer M D Magret andM Pena ldquoBimodal piecewise lineardynamical systems Reduced formsrdquo International Journal ofBifurcation and Chaos vol 20 no 9 pp 2795ndash2808 2010
[8] J Llibre M Ordonez and E Ponce ldquoOn the existence anduniqueness of limit cycles in planar continuous piecewise linearsystems without symmetryrdquo Nonlinear Analysis Real WorldApplications vol 14 no 5 pp 2002ndash2012 2013
[9] R Lum and L O Chua ldquoGeneric properties of continuouspiecewise-linear vector fields in R2rdquo IEEE Transactions onCircuits and Systems vol 38 no 9 pp 1043ndash1066 1991
[10] V I Arnold ldquoOn matrices depending on parametersrdquo UspekhiMatematicheskikh Nauk vol 26 pp 101ndash114 1971
[11] J Sotomayor and R Garcia ldquoStructural stability of piecewise-linear vector fieldsrdquo Journal of Differential Equations vol 192no 2 pp 553ndash565 2003
[12] J Ferrer M Pena and A Susin ldquoTangency-saddle singularitiesof planar bimodal linear systemsrdquo in Proceedings of the Inter-national Conference on Mathematical Models and Methods inApplied Sciences Saint Petersburg Russia September 2014
[13] J Ferrer M Magret and M Pena ldquoDifferentiable families ofplanar bimodal linear control systemsrdquoMathematical Problemsin Engineering vol 2014 Article ID 292813 9 pages 2014
[14] M W Hirsch and S Smale Differential Equations DynamicalSystems and Linear Algebra Academic Press London UK 1974
[15] E Freire E Ponce F Rodrigo and F Torres ldquoBifurcationsets of continuous piecewise linear systems with two zonesrdquoInternational Journal of Bifurcation and Chaos vol 8 no 11 pp2073ndash2097 1998
[16] J Llibre and J Sotomayor ldquoPhase portraits of planar controlsystemsrdquoNonlinear Analysis Theory Methods and Applicationsvol 27 no 10 pp 1177ndash1197 1996
[17] S H Strogatz Nonlinear Dynamics and Chaos Perseus Books2000
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
The proof is based on the following lemmas
Lemma 8 A spiral cuts 1199091= 0 in 119909
21and 119909
22 if and only if
exp (120583119905) =1198872+ 12058311990922
1198872+ 12058311990921
(17)
where 120583 = 120572 + 119894120573
Proof The solution of the system for the spiral is
(1199091(119905)
1199092(119905)) = (
120583 120583
12057421205742
)(exp (120583119905) 0
0 exp (120583119905))(120583 120583
12057421205742
)
minus1
times(
1199091(0) +
1198872
1205742
1199092(0) minus 120574
1
1198872
1205742
)+(
minus1198872
1205742
1205741
1198872
1205742
)
(18)
where 120583 is the conjugate of the eigenvalue 120583Considering that the starting and final point have 119909
1= 0
and denoting 1199092(0) = 119909
21and 119909
2(119905) = 119909
22 we get
1205742(120583 minus 120583)(
1198872
1205742
11990922minus 1205741
1198872
1205742
)
= (120583 exp (120583119905) 120583 exp (120583119905)1205742exp (120583119905) 120574
2exp (120583119905))(
1198872minus 120583(119909
21minus 1205741
1198872
1205742
)
minus1198872+ 120583(119909
21minus 1205741
1198872
1205742
)
)
(19)
Multiplying both sides of the system by (1205742 minus120583) we obtain
exp (120583119905) =1198872minus 12058311990922+ 1205831205741(11988721205742)
1198872minus 12058311990921+ 1205831205741(11988721205742)
(20)
which is equivalent to
exp (120583119905) =1198872+ 12058311990922
1198872+ 12058311990921
(21)
Lemma 9 Let one consider the saddle-spiral orbit passingthrough (0 minus119887
21205822) Then its first intersection with the sepa-
rating hyperplane (if it exists) is determined by
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(22)
Proof Using Lemma 8 imposing that 11990921= minus11988721205822 we get
11990922=
1198872
1205722 + 1205732[(119872 exp (120572119905) cos (120573119905 minus 120593) minus 120572)
+ 119894 (119872 exp (120572119905) sin (120573119905 minus 120593) + 120573)] (23)
Lemma 10 Let one assume that a finite periodic orbit existsThen
119860+1205741= minus119860minus1198861 (24)
where119860+ and119860minus are the enclosed areas in the right and the leftside respectively
Proof An analogous result is proved in [16] by means ofGreenrsquos formula Alternatively here we follow the approachin [17] Let us consider the following continuous energyfunction
119864minus=1
2(11988621199091+ 1198872)2minus1
21199092
2if 1199091le 0
119864+=1
2(12057421199091+ 1198872)2minus1
21199092
2if 1199091ge 0
(25)
If we consider the following energy piecewise functionthe change in energy Δ119864 along a periodic orbit must be nullHence
0 = Δ119864 = 119864+(0 119909119898
2) minus 119864+(0 119909119872
2)
+ 119864minus(0 119909119872
2) minus 119864minus(0 119909119898
2)
= int
119909119898
2
119909119872
2
119889119864+
1198891199092
1198891199092+ int
119909119872
2
119909119898
2
119889119864minus
1198891199092
1198891199092
(26)
where 1199091198722
and 1199091198982are the top and the bottom intersections
with the separating hyperplane respectivelyBut (25) implies
119889119864+
1198891199092
= (12057421199091+ 1198872)1198891199091
1198891199092
minus 1199092
(27)
and from the equations of the bimodal system we have
1198891199091
1198891199092
=12057411199091+ 1199092
12057421199091+ 1198872
(28)
so
119889119864+
1198891199092
= 12057411199091 (29)
And the first integral can be computed by
int
119909119898
2
119909119872
2
119889119864+
1198891199092
1198891199092= minus1205741119860+ (30)
where 119860+ is the enclosed areas in the right side And
analogously for the other integralThus Δ119864 = 0 if and only if
119860+1205741= minus119860minus1198861 (31)
Proof of Theorem 7 (1)(b) (2)(b) For 1198861= 1205741= 0 it is
obvious that we have a saddlecenter (119886 not considered case)being both subsystems symmetric with regard to the axis
6 Mathematical Problems in Engineering
1199092
= 0 Then we have a homoclinic orbit (the firstintersection with 119909
1= 0 of the orbit passing through
(0 minus11988721205822) is just (0 minus119887
21205821)) and all the orbits inside it are
finite periodic orbitsIt is also clear that if 120574
1increases (being 119886
1= 0) then the
orbit passing through (0 minus11988721205822) cuts the axis 119909
1= 0 below
(0 minus11988721205821) (notice that the spirals become divergent and the
equilibrium point descends) So the homoclinic and the finiteperiodic orbits disappear
(1)(a) (2)(a) If in addition 1198861increases then the point
(0 minus11988721205821) ascends
(1)(c) Using Lemma 9 imposing that its first intersectionwith the separating hyperplane cuts at (0 minus119887
21205821)
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(32)
being
1198872
1205722 + 1205732(119872 exp (120572119905) cos (120573119905 minus 120593) minus 120572) = minus
1198872
1205821
(33)
we get
119905 =1
1205741
ln(1205822
2
1205822
1
1205822
1minus 12057411205821minus 1205742
1205822
2minus 12057411205822minus 1205742
) (34)
Moreover for the existence of the homoclinic orbit it mustbe verified that
1205822
2
1205822
1
1205822
1minus 1205741198671205821minus 1205742
1205822
2minus 1205741198671205822minus 1205742
gt 1 (35)
which is equivalent to
12057411986711988621205822minus 12057421205822
2gt 12057411986711988621205821minus 12057421205822
1(36)
and from it we get
120574119867gt11988611205742
1198862
(37)
(2)(c) For 0 lt 1205741lt 120574119867 we claim that there is at least a stable
limit cycleThe first step is to show that a periodic solution exists
We use the classical argument of Poincare (as eg in [17])Consider a trajectory that starts at height 119909
2on the right
side of the separating hyperplane crosses to the left sideand intersects the left side of the same hyperplane at somenew height 119875(119909
2) The mapping from 119909
2to 119875(119909
2) is called
the Poincare map It tells us how the height of a trajectorychanges after one lap If we can show that there is a point119909lowast
2such that 119875(119909lowast
2) = 119909
lowast
2 then the corresponding trajectory
will be a periodic orbit and it is stable if |1198751015840(1199092)| lt 1 Being
linear both subsystems 119875(1199092) can be easily computed See
for example Figure 1 In order to show that such a 119909lowast2must
exist it is sufficient to know what the graph of 119875(1199092) looks
like roughlyLet us consider 0 le 119909
2le minus119887
21205822 For 119909
2= 0
we have the unique tangency trajectory so that the first
0 01 02 03 04 050
01
02
03
04
05
Figure 1 Distances between original and Poincare image pointsIntersection with the bisectrix corresponds to the stable limit cycleParameter values are the ones used for Example (1)
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 2 Appearance of a finite periodic orbit in case 3 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1
intersection with the separating line is under (0 0) and finally119875(0) gt 0 On the other hand for 119909
2= minus11988721205822 the first
intersection is upper (0 minus11988721205821) (recall 120574
1lt 120574119867) so that
119875(minus11988721205822) lt minus119887
21205822 Furthermore 119875(119909
2) is a continuous
function (from the theorem about the dependence of thesolutions on initial conditions) and indeed it is a smooth andmonotonic function (if not two trajectories would cross) Soby the intermediate value theorem the graph of 119875(119909
2) must
cross the bisectrix somewhere that intersection is our desired119909lowast
2We must exclude the possibility that 119875(119909
2) equiv 119909
2on
some interval in which case there would be a band ofinfinitelymany closed orbits If it happens Lemma 10 ensuresthat 119860+119860minus is constant (= minus119886
11205741) in this interval but
being119860+ 119860minus analytic functions the quotient will be constanteverywhere which is obviously false (eg when 119909
2rarr 0)
Finally as 119875(119909lowast2) = 119909
lowast
2is an isolated crossing and 119875(119909lowast
2)
is monotonic increasing then 0 lt 1198751015840(1199092) lt 1 so that the
periodic orbit is an attractor orbit
Mathematical Problems in Engineering 7
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 3 Appearance of a homoclinic orbit in case 3 1198861= minus1 119886
2=
1 1205741= 120574119867= 0742 120574
2= minus5 and 119887
2= 1
Other values 1199092verifying 119875(119909
2) = 1199092can appear But the
above reasoning shows that the possibility that 119875(1199092) equiv 1199092on
some interval is excluded so that the corresponding periodicorbit is again hyperbolic
Corollary 11 The systems in Theorem 7 with 1198861lt 0 and 0 lt
1205741lt 120574119867are structurally stable
Bifurcations appear for
(i) 1198861lt 0 120574
1= 120574119867 homoclinic orbit
(ii) 1198861lt 0 120574
1= 0 nonhyperbolic finite periodic orbits
(iii) 1198861= 0 1205741= 0 both kinds of orbits
Proof The existence of a periodic orbit implies that (3)(c)in Corollary 4 is verified Hence this case verifies all theconditions in that corollary
Examples (1)We show the structurally stable case 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1 in Figure 2 We
plot the phase portrait corresponding to the Poincare mapon the section 119909 = 0 for different initial points for each ofthem the orbits are integrated until the next oriented cutThe continuous lines correspond to inward spiraling orbitsand the discontinuous lines to outward spiraling ones Ahyperbolic finite periodic orbit exists between them
(2) Bifurcations are as follows
(i) homoclinic orbit (Figure 3) 1198861= minus1 119886
2= 1 120574
1= 120574119867
1205742= minus5 and 119887
2= 1
(ii) nonhyperbolic periodic orbits (Figure 4) 1198861= minus1
1198862= 1 1205741= 0 1205742= minus5 and 119887
2= 1
(iii) both kinds of orbits (Figure 5) 1198861= 0 119886
2= 1 120574
1= 0
1205742= minus5 and 119887
2= 1
Remark 12 In [12] some partial results for 1205741lt 0 and 120574
1gt 120574119867
have been presented
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
minus02 minus01 0 01 02 03 04 05 06
Figure 4 Appearance of nonhyperbolic periodic orbits in case 31198861= minus1 119886
2= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08
15
1
05
0
minus05
minus1
minus15
Figure 5 Appearance of both kinds of singularities in case 3 1198861= 0
1198862= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank Professor Rafael Ramirez for many helpfuldiscussions during the preparation of the paper This paperis supported by DGICYTMTM2011-23892 (Josep Ferrer andMarta Pena) and TIN2013-47137-C2-1-P (Antoni Susın)
References
[1] J C Artes J Llibre J C Medrado and M A TeixeiraldquoPiecewise linear differential systems with two real saddlesrdquoMathematics and Computers in Simulation vol 95 pp 13ndash222014
8 Mathematical Problems in Engineering
[2] K Camlibel M Heemels and H Schumacher ldquoStability andcontrollability of planar bimodal linear complementarity sys-temsrdquo in Proceedings of the 42nd IEEE Conference on Decisionand Control pp 1651ndash1656 December 2003
[3] K Camlibel M Heemels and H Schumacher ldquoOn the con-trollability of bimodal piecewise linear systemsrdquo in HybridSystems Computation and Control vol 2993 of Lecture Notesin Computer Science pp 250ndash264 Springer Berlin Germany2004
[4] M K Camlibel W P M H Heemels and J M SchumacherldquoA full characterization of stabilizability of bimodal piecewiselinear systems with scalar inputsrdquoAutomatica vol 44 no 5 pp1261ndash1267 2008
[5] V Carmona E Freire E Ponce and F Torres ldquoOn simplifyingand classifying piecewise-linear systemsrdquo IEEE Transactions onCircuits and Systems I Fundamental Theory and Applicationsvol 49 no 5 pp 609ndash620 2002
[6] M di Bernardo D J Pagano and E Ponce ldquoNonhyperbolicboundary equilibrium bifurcations in planar Filippov systemsa case study approachrdquo International Journal of Bifurcation andChaos vol 18 no 5 pp 1377ndash1392 2008
[7] J Ferrer M D Magret andM Pena ldquoBimodal piecewise lineardynamical systems Reduced formsrdquo International Journal ofBifurcation and Chaos vol 20 no 9 pp 2795ndash2808 2010
[8] J Llibre M Ordonez and E Ponce ldquoOn the existence anduniqueness of limit cycles in planar continuous piecewise linearsystems without symmetryrdquo Nonlinear Analysis Real WorldApplications vol 14 no 5 pp 2002ndash2012 2013
[9] R Lum and L O Chua ldquoGeneric properties of continuouspiecewise-linear vector fields in R2rdquo IEEE Transactions onCircuits and Systems vol 38 no 9 pp 1043ndash1066 1991
[10] V I Arnold ldquoOn matrices depending on parametersrdquo UspekhiMatematicheskikh Nauk vol 26 pp 101ndash114 1971
[11] J Sotomayor and R Garcia ldquoStructural stability of piecewise-linear vector fieldsrdquo Journal of Differential Equations vol 192no 2 pp 553ndash565 2003
[12] J Ferrer M Pena and A Susin ldquoTangency-saddle singularitiesof planar bimodal linear systemsrdquo in Proceedings of the Inter-national Conference on Mathematical Models and Methods inApplied Sciences Saint Petersburg Russia September 2014
[13] J Ferrer M Magret and M Pena ldquoDifferentiable families ofplanar bimodal linear control systemsrdquoMathematical Problemsin Engineering vol 2014 Article ID 292813 9 pages 2014
[14] M W Hirsch and S Smale Differential Equations DynamicalSystems and Linear Algebra Academic Press London UK 1974
[15] E Freire E Ponce F Rodrigo and F Torres ldquoBifurcationsets of continuous piecewise linear systems with two zonesrdquoInternational Journal of Bifurcation and Chaos vol 8 no 11 pp2073ndash2097 1998
[16] J Llibre and J Sotomayor ldquoPhase portraits of planar controlsystemsrdquoNonlinear Analysis Theory Methods and Applicationsvol 27 no 10 pp 1177ndash1197 1996
[17] S H Strogatz Nonlinear Dynamics and Chaos Perseus Books2000
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
1199092
= 0 Then we have a homoclinic orbit (the firstintersection with 119909
1= 0 of the orbit passing through
(0 minus11988721205822) is just (0 minus119887
21205821)) and all the orbits inside it are
finite periodic orbitsIt is also clear that if 120574
1increases (being 119886
1= 0) then the
orbit passing through (0 minus11988721205822) cuts the axis 119909
1= 0 below
(0 minus11988721205821) (notice that the spirals become divergent and the
equilibrium point descends) So the homoclinic and the finiteperiodic orbits disappear
(1)(a) (2)(a) If in addition 1198861increases then the point
(0 minus11988721205821) ascends
(1)(c) Using Lemma 9 imposing that its first intersectionwith the separating hyperplane cuts at (0 minus119887
21205821)
exp (120572119905) sin (120573119905 minus 120593) +120573
119872= 0 120587 + 120593 le 120573119905 le
3120587
2+ 120593
(32)
being
1198872
1205722 + 1205732(119872 exp (120572119905) cos (120573119905 minus 120593) minus 120572) = minus
1198872
1205821
(33)
we get
119905 =1
1205741
ln(1205822
2
1205822
1
1205822
1minus 12057411205821minus 1205742
1205822
2minus 12057411205822minus 1205742
) (34)
Moreover for the existence of the homoclinic orbit it mustbe verified that
1205822
2
1205822
1
1205822
1minus 1205741198671205821minus 1205742
1205822
2minus 1205741198671205822minus 1205742
gt 1 (35)
which is equivalent to
12057411986711988621205822minus 12057421205822
2gt 12057411986711988621205821minus 12057421205822
1(36)
and from it we get
120574119867gt11988611205742
1198862
(37)
(2)(c) For 0 lt 1205741lt 120574119867 we claim that there is at least a stable
limit cycleThe first step is to show that a periodic solution exists
We use the classical argument of Poincare (as eg in [17])Consider a trajectory that starts at height 119909
2on the right
side of the separating hyperplane crosses to the left sideand intersects the left side of the same hyperplane at somenew height 119875(119909
2) The mapping from 119909
2to 119875(119909
2) is called
the Poincare map It tells us how the height of a trajectorychanges after one lap If we can show that there is a point119909lowast
2such that 119875(119909lowast
2) = 119909
lowast
2 then the corresponding trajectory
will be a periodic orbit and it is stable if |1198751015840(1199092)| lt 1 Being
linear both subsystems 119875(1199092) can be easily computed See
for example Figure 1 In order to show that such a 119909lowast2must
exist it is sufficient to know what the graph of 119875(1199092) looks
like roughlyLet us consider 0 le 119909
2le minus119887
21205822 For 119909
2= 0
we have the unique tangency trajectory so that the first
0 01 02 03 04 050
01
02
03
04
05
Figure 1 Distances between original and Poincare image pointsIntersection with the bisectrix corresponds to the stable limit cycleParameter values are the ones used for Example (1)
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 2 Appearance of a finite periodic orbit in case 3 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1
intersection with the separating line is under (0 0) and finally119875(0) gt 0 On the other hand for 119909
2= minus11988721205822 the first
intersection is upper (0 minus11988721205821) (recall 120574
1lt 120574119867) so that
119875(minus11988721205822) lt minus119887
21205822 Furthermore 119875(119909
2) is a continuous
function (from the theorem about the dependence of thesolutions on initial conditions) and indeed it is a smooth andmonotonic function (if not two trajectories would cross) Soby the intermediate value theorem the graph of 119875(119909
2) must
cross the bisectrix somewhere that intersection is our desired119909lowast
2We must exclude the possibility that 119875(119909
2) equiv 119909
2on
some interval in which case there would be a band ofinfinitelymany closed orbits If it happens Lemma 10 ensuresthat 119860+119860minus is constant (= minus119886
11205741) in this interval but
being119860+ 119860minus analytic functions the quotient will be constanteverywhere which is obviously false (eg when 119909
2rarr 0)
Finally as 119875(119909lowast2) = 119909
lowast
2is an isolated crossing and 119875(119909lowast
2)
is monotonic increasing then 0 lt 1198751015840(1199092) lt 1 so that the
periodic orbit is an attractor orbit
Mathematical Problems in Engineering 7
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 3 Appearance of a homoclinic orbit in case 3 1198861= minus1 119886
2=
1 1205741= 120574119867= 0742 120574
2= minus5 and 119887
2= 1
Other values 1199092verifying 119875(119909
2) = 1199092can appear But the
above reasoning shows that the possibility that 119875(1199092) equiv 1199092on
some interval is excluded so that the corresponding periodicorbit is again hyperbolic
Corollary 11 The systems in Theorem 7 with 1198861lt 0 and 0 lt
1205741lt 120574119867are structurally stable
Bifurcations appear for
(i) 1198861lt 0 120574
1= 120574119867 homoclinic orbit
(ii) 1198861lt 0 120574
1= 0 nonhyperbolic finite periodic orbits
(iii) 1198861= 0 1205741= 0 both kinds of orbits
Proof The existence of a periodic orbit implies that (3)(c)in Corollary 4 is verified Hence this case verifies all theconditions in that corollary
Examples (1)We show the structurally stable case 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1 in Figure 2 We
plot the phase portrait corresponding to the Poincare mapon the section 119909 = 0 for different initial points for each ofthem the orbits are integrated until the next oriented cutThe continuous lines correspond to inward spiraling orbitsand the discontinuous lines to outward spiraling ones Ahyperbolic finite periodic orbit exists between them
(2) Bifurcations are as follows
(i) homoclinic orbit (Figure 3) 1198861= minus1 119886
2= 1 120574
1= 120574119867
1205742= minus5 and 119887
2= 1
(ii) nonhyperbolic periodic orbits (Figure 4) 1198861= minus1
1198862= 1 1205741= 0 1205742= minus5 and 119887
2= 1
(iii) both kinds of orbits (Figure 5) 1198861= 0 119886
2= 1 120574
1= 0
1205742= minus5 and 119887
2= 1
Remark 12 In [12] some partial results for 1205741lt 0 and 120574
1gt 120574119867
have been presented
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
minus02 minus01 0 01 02 03 04 05 06
Figure 4 Appearance of nonhyperbolic periodic orbits in case 31198861= minus1 119886
2= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08
15
1
05
0
minus05
minus1
minus15
Figure 5 Appearance of both kinds of singularities in case 3 1198861= 0
1198862= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank Professor Rafael Ramirez for many helpfuldiscussions during the preparation of the paper This paperis supported by DGICYTMTM2011-23892 (Josep Ferrer andMarta Pena) and TIN2013-47137-C2-1-P (Antoni Susın)
References
[1] J C Artes J Llibre J C Medrado and M A TeixeiraldquoPiecewise linear differential systems with two real saddlesrdquoMathematics and Computers in Simulation vol 95 pp 13ndash222014
8 Mathematical Problems in Engineering
[2] K Camlibel M Heemels and H Schumacher ldquoStability andcontrollability of planar bimodal linear complementarity sys-temsrdquo in Proceedings of the 42nd IEEE Conference on Decisionand Control pp 1651ndash1656 December 2003
[3] K Camlibel M Heemels and H Schumacher ldquoOn the con-trollability of bimodal piecewise linear systemsrdquo in HybridSystems Computation and Control vol 2993 of Lecture Notesin Computer Science pp 250ndash264 Springer Berlin Germany2004
[4] M K Camlibel W P M H Heemels and J M SchumacherldquoA full characterization of stabilizability of bimodal piecewiselinear systems with scalar inputsrdquoAutomatica vol 44 no 5 pp1261ndash1267 2008
[5] V Carmona E Freire E Ponce and F Torres ldquoOn simplifyingand classifying piecewise-linear systemsrdquo IEEE Transactions onCircuits and Systems I Fundamental Theory and Applicationsvol 49 no 5 pp 609ndash620 2002
[6] M di Bernardo D J Pagano and E Ponce ldquoNonhyperbolicboundary equilibrium bifurcations in planar Filippov systemsa case study approachrdquo International Journal of Bifurcation andChaos vol 18 no 5 pp 1377ndash1392 2008
[7] J Ferrer M D Magret andM Pena ldquoBimodal piecewise lineardynamical systems Reduced formsrdquo International Journal ofBifurcation and Chaos vol 20 no 9 pp 2795ndash2808 2010
[8] J Llibre M Ordonez and E Ponce ldquoOn the existence anduniqueness of limit cycles in planar continuous piecewise linearsystems without symmetryrdquo Nonlinear Analysis Real WorldApplications vol 14 no 5 pp 2002ndash2012 2013
[9] R Lum and L O Chua ldquoGeneric properties of continuouspiecewise-linear vector fields in R2rdquo IEEE Transactions onCircuits and Systems vol 38 no 9 pp 1043ndash1066 1991
[10] V I Arnold ldquoOn matrices depending on parametersrdquo UspekhiMatematicheskikh Nauk vol 26 pp 101ndash114 1971
[11] J Sotomayor and R Garcia ldquoStructural stability of piecewise-linear vector fieldsrdquo Journal of Differential Equations vol 192no 2 pp 553ndash565 2003
[12] J Ferrer M Pena and A Susin ldquoTangency-saddle singularitiesof planar bimodal linear systemsrdquo in Proceedings of the Inter-national Conference on Mathematical Models and Methods inApplied Sciences Saint Petersburg Russia September 2014
[13] J Ferrer M Magret and M Pena ldquoDifferentiable families ofplanar bimodal linear control systemsrdquoMathematical Problemsin Engineering vol 2014 Article ID 292813 9 pages 2014
[14] M W Hirsch and S Smale Differential Equations DynamicalSystems and Linear Algebra Academic Press London UK 1974
[15] E Freire E Ponce F Rodrigo and F Torres ldquoBifurcationsets of continuous piecewise linear systems with two zonesrdquoInternational Journal of Bifurcation and Chaos vol 8 no 11 pp2073ndash2097 1998
[16] J Llibre and J Sotomayor ldquoPhase portraits of planar controlsystemsrdquoNonlinear Analysis Theory Methods and Applicationsvol 27 no 10 pp 1177ndash1197 1996
[17] S H Strogatz Nonlinear Dynamics and Chaos Perseus Books2000
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
1
05
0
minus05
minus1
minus15
minus2
minus1 minus08 minus06 minus04 minus02 0 02 04 0806
Figure 3 Appearance of a homoclinic orbit in case 3 1198861= minus1 119886
2=
1 1205741= 120574119867= 0742 120574
2= minus5 and 119887
2= 1
Other values 1199092verifying 119875(119909
2) = 1199092can appear But the
above reasoning shows that the possibility that 119875(1199092) equiv 1199092on
some interval is excluded so that the corresponding periodicorbit is again hyperbolic
Corollary 11 The systems in Theorem 7 with 1198861lt 0 and 0 lt
1205741lt 120574119867are structurally stable
Bifurcations appear for
(i) 1198861lt 0 120574
1= 120574119867 homoclinic orbit
(ii) 1198861lt 0 120574
1= 0 nonhyperbolic finite periodic orbits
(iii) 1198861= 0 1205741= 0 both kinds of orbits
Proof The existence of a periodic orbit implies that (3)(c)in Corollary 4 is verified Hence this case verifies all theconditions in that corollary
Examples (1)We show the structurally stable case 1198861= minus1
1198862= 1 120574
1= 01 120574
2= minus5 and 119887
2= 1 in Figure 2 We
plot the phase portrait corresponding to the Poincare mapon the section 119909 = 0 for different initial points for each ofthem the orbits are integrated until the next oriented cutThe continuous lines correspond to inward spiraling orbitsand the discontinuous lines to outward spiraling ones Ahyperbolic finite periodic orbit exists between them
(2) Bifurcations are as follows
(i) homoclinic orbit (Figure 3) 1198861= minus1 119886
2= 1 120574
1= 120574119867
1205742= minus5 and 119887
2= 1
(ii) nonhyperbolic periodic orbits (Figure 4) 1198861= minus1
1198862= 1 1205741= 0 1205742= minus5 and 119887
2= 1
(iii) both kinds of orbits (Figure 5) 1198861= 0 119886
2= 1 120574
1= 0
1205742= minus5 and 119887
2= 1
Remark 12 In [12] some partial results for 1205741lt 0 and 120574
1gt 120574119867
have been presented
1
08
06
04
02
0
minus02
minus04
minus06
minus08
minus1
minus02 minus01 0 01 02 03 04 05 06
Figure 4 Appearance of nonhyperbolic periodic orbits in case 31198861= minus1 119886
2= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
minus1 minus08 minus06 minus04 minus02 0 02 04 06 08
15
1
05
0
minus05
minus1
minus15
Figure 5 Appearance of both kinds of singularities in case 3 1198861= 0
1198862= 1 120574
1= 0 120574
2= minus5 and 119887
2= 1
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank Professor Rafael Ramirez for many helpfuldiscussions during the preparation of the paper This paperis supported by DGICYTMTM2011-23892 (Josep Ferrer andMarta Pena) and TIN2013-47137-C2-1-P (Antoni Susın)
References
[1] J C Artes J Llibre J C Medrado and M A TeixeiraldquoPiecewise linear differential systems with two real saddlesrdquoMathematics and Computers in Simulation vol 95 pp 13ndash222014
8 Mathematical Problems in Engineering
[2] K Camlibel M Heemels and H Schumacher ldquoStability andcontrollability of planar bimodal linear complementarity sys-temsrdquo in Proceedings of the 42nd IEEE Conference on Decisionand Control pp 1651ndash1656 December 2003
[3] K Camlibel M Heemels and H Schumacher ldquoOn the con-trollability of bimodal piecewise linear systemsrdquo in HybridSystems Computation and Control vol 2993 of Lecture Notesin Computer Science pp 250ndash264 Springer Berlin Germany2004
[4] M K Camlibel W P M H Heemels and J M SchumacherldquoA full characterization of stabilizability of bimodal piecewiselinear systems with scalar inputsrdquoAutomatica vol 44 no 5 pp1261ndash1267 2008
[5] V Carmona E Freire E Ponce and F Torres ldquoOn simplifyingand classifying piecewise-linear systemsrdquo IEEE Transactions onCircuits and Systems I Fundamental Theory and Applicationsvol 49 no 5 pp 609ndash620 2002
[6] M di Bernardo D J Pagano and E Ponce ldquoNonhyperbolicboundary equilibrium bifurcations in planar Filippov systemsa case study approachrdquo International Journal of Bifurcation andChaos vol 18 no 5 pp 1377ndash1392 2008
[7] J Ferrer M D Magret andM Pena ldquoBimodal piecewise lineardynamical systems Reduced formsrdquo International Journal ofBifurcation and Chaos vol 20 no 9 pp 2795ndash2808 2010
[8] J Llibre M Ordonez and E Ponce ldquoOn the existence anduniqueness of limit cycles in planar continuous piecewise linearsystems without symmetryrdquo Nonlinear Analysis Real WorldApplications vol 14 no 5 pp 2002ndash2012 2013
[9] R Lum and L O Chua ldquoGeneric properties of continuouspiecewise-linear vector fields in R2rdquo IEEE Transactions onCircuits and Systems vol 38 no 9 pp 1043ndash1066 1991
[10] V I Arnold ldquoOn matrices depending on parametersrdquo UspekhiMatematicheskikh Nauk vol 26 pp 101ndash114 1971
[11] J Sotomayor and R Garcia ldquoStructural stability of piecewise-linear vector fieldsrdquo Journal of Differential Equations vol 192no 2 pp 553ndash565 2003
[12] J Ferrer M Pena and A Susin ldquoTangency-saddle singularitiesof planar bimodal linear systemsrdquo in Proceedings of the Inter-national Conference on Mathematical Models and Methods inApplied Sciences Saint Petersburg Russia September 2014
[13] J Ferrer M Magret and M Pena ldquoDifferentiable families ofplanar bimodal linear control systemsrdquoMathematical Problemsin Engineering vol 2014 Article ID 292813 9 pages 2014
[14] M W Hirsch and S Smale Differential Equations DynamicalSystems and Linear Algebra Academic Press London UK 1974
[15] E Freire E Ponce F Rodrigo and F Torres ldquoBifurcationsets of continuous piecewise linear systems with two zonesrdquoInternational Journal of Bifurcation and Chaos vol 8 no 11 pp2073ndash2097 1998
[16] J Llibre and J Sotomayor ldquoPhase portraits of planar controlsystemsrdquoNonlinear Analysis Theory Methods and Applicationsvol 27 no 10 pp 1177ndash1197 1996
[17] S H Strogatz Nonlinear Dynamics and Chaos Perseus Books2000
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
[2] K Camlibel M Heemels and H Schumacher ldquoStability andcontrollability of planar bimodal linear complementarity sys-temsrdquo in Proceedings of the 42nd IEEE Conference on Decisionand Control pp 1651ndash1656 December 2003
[3] K Camlibel M Heemels and H Schumacher ldquoOn the con-trollability of bimodal piecewise linear systemsrdquo in HybridSystems Computation and Control vol 2993 of Lecture Notesin Computer Science pp 250ndash264 Springer Berlin Germany2004
[4] M K Camlibel W P M H Heemels and J M SchumacherldquoA full characterization of stabilizability of bimodal piecewiselinear systems with scalar inputsrdquoAutomatica vol 44 no 5 pp1261ndash1267 2008
[5] V Carmona E Freire E Ponce and F Torres ldquoOn simplifyingand classifying piecewise-linear systemsrdquo IEEE Transactions onCircuits and Systems I Fundamental Theory and Applicationsvol 49 no 5 pp 609ndash620 2002
[6] M di Bernardo D J Pagano and E Ponce ldquoNonhyperbolicboundary equilibrium bifurcations in planar Filippov systemsa case study approachrdquo International Journal of Bifurcation andChaos vol 18 no 5 pp 1377ndash1392 2008
[7] J Ferrer M D Magret andM Pena ldquoBimodal piecewise lineardynamical systems Reduced formsrdquo International Journal ofBifurcation and Chaos vol 20 no 9 pp 2795ndash2808 2010
[8] J Llibre M Ordonez and E Ponce ldquoOn the existence anduniqueness of limit cycles in planar continuous piecewise linearsystems without symmetryrdquo Nonlinear Analysis Real WorldApplications vol 14 no 5 pp 2002ndash2012 2013
[9] R Lum and L O Chua ldquoGeneric properties of continuouspiecewise-linear vector fields in R2rdquo IEEE Transactions onCircuits and Systems vol 38 no 9 pp 1043ndash1066 1991
[10] V I Arnold ldquoOn matrices depending on parametersrdquo UspekhiMatematicheskikh Nauk vol 26 pp 101ndash114 1971
[11] J Sotomayor and R Garcia ldquoStructural stability of piecewise-linear vector fieldsrdquo Journal of Differential Equations vol 192no 2 pp 553ndash565 2003
[12] J Ferrer M Pena and A Susin ldquoTangency-saddle singularitiesof planar bimodal linear systemsrdquo in Proceedings of the Inter-national Conference on Mathematical Models and Methods inApplied Sciences Saint Petersburg Russia September 2014
[13] J Ferrer M Magret and M Pena ldquoDifferentiable families ofplanar bimodal linear control systemsrdquoMathematical Problemsin Engineering vol 2014 Article ID 292813 9 pages 2014
[14] M W Hirsch and S Smale Differential Equations DynamicalSystems and Linear Algebra Academic Press London UK 1974
[15] E Freire E Ponce F Rodrigo and F Torres ldquoBifurcationsets of continuous piecewise linear systems with two zonesrdquoInternational Journal of Bifurcation and Chaos vol 8 no 11 pp2073ndash2097 1998
[16] J Llibre and J Sotomayor ldquoPhase portraits of planar controlsystemsrdquoNonlinear Analysis Theory Methods and Applicationsvol 27 no 10 pp 1177ndash1197 1996
[17] S H Strogatz Nonlinear Dynamics and Chaos Perseus Books2000
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of