Research Article Structural Controllability of Discrete ...structural controllability of the three...
10
Research Article Structural Controllability of Discrete-Time Linear Control Systems with Time-Delay: A Delay Node Inserting Approach Ailing Qi, 1 Xuewei Ju, 1 Qing Zhang, 1 and Zengqiang Chen 2 1 School of Science, Civil Aviation University of China, Tianjin 300300, China 2 Department of Automation, Nankai University, Tianjin 300071, China Correspondence should be addressed to Xuewei Ju; [email protected] Received 16 October 2015; Accepted 17 December 2015 Academic Editor: Ivanka Stamova Copyright © 2016 Ailing Qi et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. is paper is concerned with the structural controllability analysis for discrete-time linear control systems with time-delay. By adding virtual delay nodes, the linear systems with time-delay are transformed into corresponding linear systems without time-delay, and the structural controllability of them is equivalent. at is to say, the time-delay does not affect or change the controllability of the systems. Several examples are also presented to illustrate the theoretical results. 1. Introduction Controllability has been one of the fundamental concepts in modern control theory and has played an essential role in its development because of the broad applications. Controllabil- ity in the classical sense refers to the complete controllability which means that it is possible to steer control systems from an arbitrary initial state to an arbitrary final state using the set of unconstrained admissible controls. In practice, admissible controls are always required to satisfy certain additional constraints. e controllability for linear dynamical systems with constrained controls has also been studied; see [1–3]. e problem of controllability with unconstrained controls for both linear and nonlinear systems has been considered in various ways; see [4–8] and the references therein. In this paper, we will consider the problem of structural controllability on unconstrained values of admissible con- trols. e concept of structural controllability was introduced by Lin in 1974 to study the controllability of linear systems, and it was extended to other systems, such as complex net- works and multiagent systems. Roughly speaking, structural controllability generally means that, by adjusting the free parameters of the structured matrix, the control system is completely controllable. Controllability is important in the solution of many control problems, yet the determination of controllability indices, for example, is a particularly ill- posed computational problem as is the problem of checking the controllability of an uncontrollable system. Structural controllability, on the other hand, is a property that is as useful as traditional controllability and can be determined precisely by a computer. e structural controllability is a generalization of traditional controllability concept for linear systems and is purely based on the graphic topologies among state and input vertices. It is now a fundamental tool to study the controllability and enables us to understand the control systems. e necessary and sufficient conditions of structural con- trollability were constructed by Lin in [9] from the graphical point of view. Since then, much work has been done on the structural controllability of linear systems. For example, Shields and Pearson extended Lin’s results on structural con- trollability of single-input linear systems to multi-input linear systems [10]. For linear time-varying systems, the structural properties were defined as the strong structural controllabil- ity; for the related research, see [11, 12]. Recently, in view of switched linear systems, the structural controllability was investigated by Liu et al. [13]. It is well recognized that time-delay is oſten encountered in physical and biological systems. Time-delay phenomenon may occur naturally because of the physical characteristics of information transmitting and diversity of signals, as well as the bandwidth of communication channels. Systems with time-delay are more difficult to handle in engineering since the controllability matrices are usually complex. Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2016, Article ID 1429164, 9 pages http://dx.doi.org/10.1155/2016/1429164
Transcript of Research Article Structural Controllability of Discrete ...structural controllability of the three...

Research ArticleStructural Controllability of Discrete-Time Linear ControlSystems with Time-Delay: A Delay Node Inserting Approach
Ailing Qi,1 Xuewei Ju,1 Qing Zhang,1 and Zengqiang Chen2
1School of Science, Civil Aviation University of China, Tianjin 300300, China2Department of Automation, Nankai University, Tianjin 300071, China
Correspondence should be addressed to Xuewei Ju; [email protected]
Received 16 October 2015; Accepted 17 December 2015
Academic Editor: Ivanka Stamova
Copyright © 2016 Ailing Qi et al.This is an open access article distributed under the Creative CommonsAttribution License, whichpermits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This paper is concerned with the structural controllability analysis for discrete-time linear control systems with time-delay.By adding virtual delay nodes, the linear systems with time-delay are transformed into corresponding linear systems withouttime-delay, and the structural controllability of them is equivalent. That is to say, the time-delay does not affect or change thecontrollability of the systems. Several examples are also presented to illustrate the theoretical results.
1. Introduction
Controllability has been one of the fundamental concepts inmodern control theory and has played an essential role in itsdevelopment because of the broad applications. Controllabil-ity in the classical sense refers to the complete controllabilitywhich means that it is possible to steer control systems froman arbitrary initial state to an arbitrary final state using the setof unconstrained admissible controls. In practice, admissiblecontrols are always required to satisfy certain additionalconstraints. The controllability for linear dynamical systemswith constrained controls has also been studied; see [1–3].The problem of controllability with unconstrained controlsfor both linear and nonlinear systems has been considered invarious ways; see [4–8] and the references therein.
In this paper, we will consider the problem of structuralcontrollability on unconstrained values of admissible con-trols.The concept of structural controllability was introducedby Lin in 1974 to study the controllability of linear systems,and it was extended to other systems, such as complex net-works and multiagent systems. Roughly speaking, structuralcontrollability generally means that, by adjusting the freeparameters of the structured matrix, the control system iscompletely controllable. Controllability is important in thesolution of many control problems, yet the determinationof controllability indices, for example, is a particularly ill-posed computational problem as is the problem of checking
the controllability of an uncontrollable system. Structuralcontrollability, on the other hand, is a property that is asuseful as traditional controllability and can be determinedprecisely by a computer. The structural controllability is ageneralization of traditional controllability concept for linearsystems and is purely based on the graphic topologies amongstate and input vertices. It is now a fundamental tool to studythe controllability and enables us to understand the controlsystems.
The necessary and sufficient conditions of structural con-trollability were constructed by Lin in [9] from the graphicalpoint of view. Since then, much work has been done onthe structural controllability of linear systems. For example,Shields and Pearson extended Lin’s results on structural con-trollability of single-input linear systems tomulti-input linearsystems [10]. For linear time-varying systems, the structuralproperties were defined as the strong structural controllabil-ity; for the related research, see [11, 12]. Recently, in view ofswitched linear systems, the structural controllability wasinvestigated by Liu et al. [13].
It is well recognized that time-delay is often encounteredin physical and biological systems. Time-delay phenomenonmay occur naturally because of the physical characteristicsof information transmitting and diversity of signals, as wellas the bandwidth of communication channels. Systems withtime-delay are more difficult to handle in engineering sincethe controllability matrices are usually complex.
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2016, Article ID 1429164, 9 pageshttp://dx.doi.org/10.1155/2016/1429164

2 Mathematical Problems in Engineering
Studying the linear delayed systems has become animportant topic in control theory and many researchers havedevoted themselves to the controllability analysis for thedelayed systems. For example, a data-basedmethod is used toanalyze the controllability of discrete-time linear delayed sys-tem by Liu et al. [14]. The controllability and observability oflinear time-delay differential equations have been studied in[15, 16]. Two sufficient conditions were recently reported in Jiet al. [17] with respect to the controllability of multiagent sys-temswith single time-delay.The results were then extended tomultiagent systems with time-delay in state and control [18]and switching topology [19].
In spite of this progress, there is less work concernedwith the structural controllability of linear systemswith time-delay. This paper is devoted to the structural controllabilityanalysis for discrete-time linear delayed systems. By addingvirtual delay nodes, the linear systems with time-delay aretransformed into corresponding linear systems without time-delay; the necessary and sufficient conditions with respect tothe structural controllability of linear delayed systems areobtained.
This paper is organized as follows. In Section 2, somebasic definitions and preliminary results are presented.We introduce the discrete-time linear delayed systems inSection 3 and, by adding delay nodes, the linear systemswith time-delay are transformed into corresponding linearsystems without time-delay and the main result of this paperis obtained. Several examples are also presented to illustratethe theoretical results in Section 4. The paper concludes inSection 5 with a summary and the possible future researchdirections.
2. Preliminaries
This section gives some basic definitions and preliminaryresults.
2.1.The Representation Graph of the Linear Systems. Considerthe following discrete-time linear control system:
𝑥 (𝑘 + 1) = 𝐴𝑥 (𝑘) + 𝐵𝑢 (𝑘) , (1)
where state 𝑥 and input 𝑢 take their values in R𝑛 and R𝑟,respectively. Matrixes 𝐴 = (𝑎
𝑖𝑗)𝑛×𝑛
and 𝐵 = (𝑏𝑖𝑗)𝑛×𝑟
areassumed to be structured matrices, which means that theirelements are either fixed zeros or free parameters. For conve-nience in this paper, the structured system (1) is representedas matrix pair (𝐴, 𝐵).
The matrix pair (𝐴, 𝐵) has the same structure as the pair(𝐴, 𝐵) of the same dimensions if for every fixed (zero) entry ofmatrix (𝐴, 𝐵) the corresponding entry of matrix (𝐴, 𝐵) is alsofixed (zero) and for every fixed (zero) entry of matrix (𝐴, 𝐵)the corresponding entry of matrix (𝐴, 𝐵) is also fixed (zero).
The structured system (𝐴, 𝐵) can be described by adirected graph (Lin [9]).
The representation graph of structured system (1) is adirected graph G, with vertex set V = X ∪ U, whereX = {𝑥
1, 𝑥2, . . . , 𝑥
𝑛} is called state vertex set and U =
{𝑢1, 𝑢2, . . . , 𝑢
𝑟} is called input vertex set, and edge set I =
I𝑈𝑋∪I𝑋𝑋
, where
I𝑈𝑋= {(𝑢
𝑖, 𝑥𝑗) ‖ 𝑏𝑗𝑖= 0, 1 ≤ 𝑖 ≤ 𝑟, 1 ≤ 𝑗 ≤ 𝑛} (2)
is the oriented edges between inputs and states, and
I𝑋𝑋= {(𝑥
𝑖, 𝑥𝑗) ‖ 𝑎𝑗𝑖= 0, 1 ≤ 𝑖 ≤ 𝑛, 1 ≤ 𝑗 ≤ 𝑛} (3)
is the oriented edges between states defined by the intercon-nectionmatrices𝐴 and 𝐵 above.This directed graphG is alsocalled the graph ofmatrix pair (𝐴, 𝐵) and denoted byG(𝐴, 𝐵).
Definition 1 ([9] (stem)). An alternating sequence of distinctvertices and oriented edges is called a directed path, in whichthe terminal node of any edge never coincides with its initialnode or the initial or the terminal nodes of the former edges.A stem is a directed path in the state vertex set X, whichbegins in the input vertex setU.
Definition 2 ([9] (accessibility)). A vertex (other than theinput vertices) is called nonaccessible if and only if there is nopossibility of reaching this vertex through any stem of graphG.
Definition 3 ([9] (dilation)). Consider one vertex set 𝑆 formedby the vertices from the state vertices set X and determineanother vertex set 𝑇(𝑆), which contains all vertices V with theproperty that there exists an oriented edge from V to one ver-tex in 𝑆.Then, graphG contains a “dilation” if and only if thereexist at least a set 𝑆 of 𝑘 vertices in the vertex set of the graphsuch that there are no more than 𝑘 − 1 vertices in 𝑇(𝑆).
2.2. Controllability and Structural Controllability. It is wellknown that for delayed control systems generally two typesof controllability are considered: absolute controllability andrelative controllability; see paper [3]. In this paper, we willconsider the relative controllability under general assumptionon unconstrained values of admissible controls. The defini-tions are as follows.
Definition 4 (see [5]). The linear control system (1) is said tobe (completely) controllable if for any initial state 𝑥(0) andany terminal state 𝑥
𝑓there exist a positive integer 𝑘 and a
sequence of controls 𝑢(0), . . . , 𝑢(𝑘 − 1) such that 𝑥(𝑘) = 𝑥𝑓.
For the linear system (1), let 𝑊 = [𝐵, 𝐴𝐵, . . . , 𝐴𝑛−1𝐵],and we have the following complete controllability criterion(Kalman [6]).
Lemma 5. The linear control system (1) is controllable if andonly if rank [W] = n.
Definition 6 (see [9]). The linear control system (1) givenby its structured matrices (𝐴, 𝐵) is said to be structurallycontrollable if and only if there exists a matrix pair (𝐴, 𝐵)having the same structure as the pair (𝐴, 𝐵) such thatthe corresponding structured system (𝐴, 𝐵) is completelycontrollable.

Mathematical Problems in Engineering 3
The following lemma characterizes the structural control-lability for the linear structured system (1) (Liu et al. [13]).
Lemma 7. The linear structured system (𝐴, 𝐵) is structurallycontrollable if and only if its representation graph satisfies that
(i) there is no nonaccessible vertex inG(𝐴, 𝐵),(ii) there is no “dilation” inG(𝐴, 𝐵).
3. Main Results
3.1. Discrete-Time Linear Systems with Time-Delay. Considerthe following linear control systems with time-delay in state:
𝑥𝑖(𝑘 + 1) =
𝑛
∑
𝑗=1
𝑎𝑖𝑗𝑥𝑗(𝑘 − 𝜏
𝑖𝑗) +
𝑟
∑
𝑗=1
𝑏𝑖𝑗𝑢𝑗(𝑘) ,
𝑖 = 1, 2, . . . , 𝑛,
(4)
where 𝑥 = [𝑥1, 𝑥2, . . . , 𝑥
𝑛]𝑇
∈ R𝑛 is the state vector and𝑢 = [𝑢
1, 𝑢2, . . . , 𝑢
𝑟]𝑇
∈ R𝑟 is the control input vector.Matrices𝐴 = (𝑎
𝑖𝑗)𝑛×𝑛
and 𝐵 = (𝑏𝑖𝑗)𝑛×𝑟
are assumed to be structuredmatrices. 0 ≤ 𝜏
𝑖𝑗≤ 𝑏 with bounded maximum delay 𝑏 and
each directed edge (𝑥𝑖, 𝑥𝑗) experiences a fixed delay 𝜏
𝑖𝑗in the
sense that each message leaving state node 𝑥𝑖takes 𝜏
𝑖𝑗
iterations to reach 𝑥𝑗.
Definition 8. The linear delayed system (4) given by its struc-tured matrices (𝐴, 𝐵) is said to be structurally controllable ifand only if there exists amatrix pair (𝐴, 𝐵) has the same struc-ture as the pair (𝐴, 𝐵) such that the corresponding delayedsystem (4) given by its structured matrices (𝐴, 𝐵) is com-pletely controllable.
By inserting delays on edges, the linear delayed systemis transformed into a corresponding linear system withouttime-delay.
For every directed edge (𝑥𝑖, 𝑥𝑗) with time-delay 𝜏
𝑖𝑗, we
want to add 𝜏𝑖𝑗nodes 𝑑𝑖𝑗
1, 𝑑𝑖𝑗
2, . . . , 𝑑
𝑖𝑗
𝜏𝑖𝑗
on the edge, replace(𝑥𝑖, 𝑥𝑗) by a delay chain 𝑑𝑖𝑗
1, 𝑑𝑖𝑗
2, . . . , 𝑑
𝑖𝑗
𝜏𝑖𝑗
, and reroute allmessages from 𝑥
𝑖to 𝑥𝑗through that chain. Instead, 𝑥
𝑖sends
its message to delay node 𝑥𝑖𝑗1with the weight of the message
being the same as the one that would be used to send a mes-sage from 𝑥
𝑖to 𝑥𝑗directly without delay; after that, all delay
nodes just forward information until the destination node 𝑥𝑗
is reached (see Figure 1).Note 𝜏 = 𝜏
11+ ⋅ ⋅ ⋅+𝜏
1𝑛+𝜏21+ ⋅ ⋅ ⋅+𝜏
21+ ⋅ ⋅ ⋅+𝜏
𝑛1+ ⋅ ⋅ ⋅+𝜏
𝑛𝑛,
all the numbers of time-delays. Let
�� = [𝑥1, . . . , 𝑥
𝑛, 𝑑11
1, . . . , 𝑑
11
𝜏11
, . . . , 𝑑1𝑛
1, . . . , 𝑑
1𝑛
𝜏1𝑛
, . . . , 𝑑𝑛1
1, . . . ,
𝑑𝑛1
𝜏𝑛1
, . . . , 𝑑𝑛𝑛
1, . . . , 𝑑
𝑛𝑛
𝜏𝑛𝑛
]
𝑇
;
(5)
then, �� ∈ R𝑛+𝜏.Thus, the linear delayed system (4) is equivalent to the
following linear system without time-delay:
�� (𝑘 + 1) = A�� (𝑘) +B𝑢 (𝑘) , (6)
where A ∈ R(𝑛+𝜏)×(𝑛+𝜏) and B ∈ R(𝑛+𝜏)×𝑟 are correspondingto 𝐴 and 𝐵, respectively.
Example 9. Consider a very simple example. Without delayswe define
𝐴 =(
2
3
1
3
0
1
3
1
3
1
3
0
1
3
2
3
),
𝐵 = (
1
0
0
) .
(7)
Assume that the directed edge (𝑥1, 𝑥2) experiences a fixed
delay 4 in the sense that the message leaving state node 𝑥1
takes 4 iterations to reach state node 𝑥2. Then, by inserting 4
delay nodes on the edge (𝑥1, 𝑥2), replace (𝑥
1, 𝑥2) by a delay
chain 𝑑1, 𝑑2, 𝑑3, 𝑑4and reroute all messages from 𝑥
1to 𝑥2
through that chain; that is, 𝑥1sends its message to delay node
𝑑1with the weight being 2/3, and then 𝑑
1sends itsmessage to
delay node 𝑑2, 𝑑2sends its message to delay node 𝑑
3, 𝑑3sends
its message to delay node 𝑑4, and 𝑑
4sends its message to state
node 𝑥2all with the weight being 1. Then, the linear control
systemwith delays is transformed into a linear systemwithouttime-delay with the corresponding structured matrices givenby
A =
(
(
(
(
(
(
(
(
(
(
2
3
1
3
0 0 0 0 0
0
1
3
1
3
0 0 0 1
0
1
3
2
3
0 0 0 0
1
3
0 0 0 0 0 0
0 0 0 1 0 0 0
0 0 0 0 1 0 0
0 0 0 0 0 1 0
)
)
)
)
)
)
)
)
)
)
,
B =
(
(
(
(
(
(
(
(
(
1
0
0
0
0
0
0
)
)
)
)
)
)
)
)
)
.
(8)
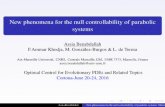
The directed graphs G(𝐴, 𝐵) and G(A,B) can be seen inFigure 1.
3.2. Structural Controllability Analysis. As mentioned above,the structural controllability of the linear delayed system (4)is in consensuswith that of the linear system (6)without time-delay. However, some parameters of the structured matrixAare not adjusted; the weight of the edge from one delay nodeto another node is fixed number 1 (see Figure 1). Therefore,it has failed to apply Lemma 7 to characterize the structural

4 Mathematical Problems in Engineering
x1
x2
x3
u1
(a)
x1
x2
x3
d2
d3
d4
d1
u1
(b)
Figure 1: (a) A directed graph with 3 state nodes. (b) The directed graph when we add a delay of 4 on the edge (𝑥1, 𝑥2).
controllability of the linear system (6).Thus, we construct thefollowing linear structured system:
�� (𝑘 + 1) =A�� (𝑘) +B𝑢 (𝑘) , (9)
where �� = [𝑥1, . . . , 𝑥
𝑛, 𝑥𝑛+1, . . . , 𝑥
𝑛+𝜏]𝑇
∈ R𝑛+𝜏 and matricesA andB are structured matrices such that (A,B) have thesame structure as (A,B).
For example, we construct a linear structured systemcorresponding to the linear control system described by adirected graph in Figure 1 with the structuredmatricesA andB given by
A =
(
(
(
(
(
(
(
(
(
𝛼11𝛼120 0 0 0 0
0 𝛼22𝛼230 0 0 𝛼
27
0 𝛼32𝛼330 0 0 0
𝛼410 0 0 0 0 0
0 0 0 𝛼540 0 0
0 0 0 0 𝛼650 0
0 0 0 0 0 𝛼760
)
)
)
)
)
)
)
)
)
,
B =
(
(
(
(
(
(
(
(
(
𝛽1
0
0
0
0
0
0
)
)
)
)
)
)
)
)
)
(10)
with 𝛼𝑖𝑗(1 ≤ 𝑖, 𝑗 ≤ 7) and 𝛽
1being nonzero free parameters.
In fact, the structure of the representation graphG(A,B)is the same as graphG(A,B), only denoting the delay nodesof G(A,B) as ordinary nodes is graph G(A,B). On theother hand, graphG(A,B) can also be seen as the expansionofG(𝐴, 𝐵).
The following theorems build the equivalence of thestructural controllability of the three systems: system (1),system (4), and system (9).
Theorem 10. The linear system (6) is structurally controllableif and only if the linear system (9) is structurally controllable.
Proof. Thenecessity is obvious; we then prove the sufficiency.Assume that the linear system (9) is structurally controllable;that is, there exists a matrix pair (A,B) having the samestructure as (A,B) and satisfying
rank [B,AB, . . . ,A𝑛−1
B]𝑇
= 𝑛 + 𝜏. (11)
In the following, we will adjust some parameters of A,wihch is the corresponding parameters to fixed numbers 1 ofA.
Firstly, we analyze the characteristics of columns ofA. It iseasy to conclude from graphG(A,B) that the weight of edgefrom each delay node is number 1.Then, there is one element1 in every column from the 𝑛+ 1 column to the 𝑛+ 𝜏 column,and there is only one non-zero parameter 1 in every columnfrom the 𝑛 + 1 column to the 𝑛 + 𝜏 column since there is onlyone edge from each delay node. These elements 1 are eitherbelow the diagonal or above the diagonal. If they are belowthe diagonal, they will be in the form of inclined diagonal;else, if they are above the diagonal, they are in the first 𝑛 rows(see Figure 1).
Then, from the 𝑛 + 𝜏 column (the last column), we carrythe elementary transformation on the matrixA. In the 𝑛 + 𝜏column of the matrixA, there is only one element that is notzero, and the nonzero element is fixednumber 1. SinceAhavethe same structure as A, the corresponding element in the𝑛 + 𝜏 column ofA is also nonzero, assuming that he value ofthis element is 𝜎
𝑛+𝜏. Our goal is to put this number 𝜎
𝑛+𝜏into
number 1. We can do it as we just need to multiply the 𝑛 + 𝜏column of A by 1/𝜎
𝑛+𝜏. For the sake of calculating the rank
of the controllability matrix, we then multiply the 𝑛 + 𝜏 rowofA by 𝜎
𝑛+𝜏.
Next, assume that the single nonzero element in the 𝑛 +𝜏 − 1 column of A is 𝜎
𝑛+𝜏−1. We then multiply the 𝑛 + 𝜏 − 1

Mathematical Problems in Engineering 5
column ofA by 1/𝜎𝑛+𝜏−1
and multiply the 𝑛+𝜏−1 row ofAby 𝜎𝑛+𝜏−1
.Continue to do elementary transformation according to
the rules, multiply the 𝑛 + 𝜏 − 𝑗 column by 1/𝜎𝑛+𝜏−𝑗
, andmultiply the 𝑛 + 𝜏 − 𝑗 row by 𝜎
𝑛+𝜏−𝑗, until the 𝑛 + 1 column of
A. Due to the features of matrix A, The column number ofthe nonzero element in the 𝑛 + 𝑘 (1 ≤ 𝑘 ≤ 𝜏) row ofA is lessthan 𝑛 + 𝑘, so multiply the 𝑛 + 𝑘 row by 𝜎
𝑛+𝑘which changes
the elements in the first 𝑛 + 𝑘 columns; the elements after𝑛 + 𝑘 columns having been transferred to 1 are not subjectto change.
In this way, matrixA is transformed to a matrixA withthe invertible matrix 𝑃, the product of a series of elementarymatrix, such thatA = 𝑃−1A𝑃.
Let B = 𝑃−1B𝑃. Here the matrix B = (B, 0) ∈R(𝑛+𝜏)×(𝑛+𝜏) is constituted byB as sub-block matrix.Then Bcan be expressed in the form of a partitioned matrix, that isB = (B, 0) with the first 𝑟 columns denoted byB. We thusobtained a pair of matrix (A,B) having the same structureas the matrix pair (A,B), such that
rank [B,AB, . . . ,A𝑛−1
B]𝑇
= rank [B,AB, . . . ,A𝑛−1
B]𝑇
= rank [𝑃−1B𝑃, 𝑃−1AB𝑃, . . . , 𝑃−1A𝑛−1
B𝑃]𝑇
= rank [B,AB, . . . ,A𝑛−1
B]𝑇
= rank [B,AB, . . . ,A𝑛−1
B]𝑇
= 𝑛 + 𝜏,
(12)
which implies the structural controllability of system (6).Thiscompletes the proof.
The theorem above reveals that the structural control-lability of the time-delayed system (4) is consistent withthe expansion system (9) without time-delay. Next, we willshow the equivalence of the structural controllability betweensystem (1) and the expansion system (9).
Theorem 11. The linear system (1) is structurally controllable ifand only if the linear system (9) is structurally controllable.
Proof. The proof of the theorem mainly used the results ofLemma 7. Prove the necessity first. Suppose that the linearsystem (9) is not structurally controllable; it means that thereis nonaccessible vertex or there is “dilation” in G(A,B).Since there is no difference between graph G(A,B) andgraph G(A,B) from the view of graph theory, thereforethere is nonaccessible vertex or there is “dilation” inG(A,B).
In the first case, there is nonaccessible vertex inG(A,B).If the nonaccessible vertex is the adding delayed vertex 𝑑𝜏𝑖𝑗
𝑘,
the 𝑘 delayed vertex adding on the edge (𝑥𝑖, 𝑥𝑗), then the
state vertex 𝑥𝑖is a nonaccessible vertex. If the nonaccessible
vertex is state vertex, then there exists the correspondingnonaccessible state vertex in G(𝐴, 𝐵). This is because if the
state vertex𝑥𝑖and the state vertex𝑥
𝑗experience a delay 𝜏
𝑖𝑗, we
add 𝜏𝑖𝑗delay vertex on the edge (𝑥
𝑖, 𝑥𝑗) in the graph G(𝐴, 𝐵)
and replace (𝑥𝑖, 𝑥𝑗) by a delay chain; the resulting graph is
G(A,B). The state vertex in G(A,B) is the correspondingstate vertex inG(𝐴, 𝐵).
In the second case, there is “dilation” inG(A,B).That is,there exist at least a set 𝑆 of 𝑘 vertices in the vertex set of graphG(A,B) such that there are no more than 𝑘 − 1 vertices in𝑇(𝑆). If there are 𝜎 (0 ≤ 𝜎 ≤ 𝑘) delayed vertices in set 𝑆, thenthe 𝜎 delayed vertices are in set 𝑇(𝑆), and there are no morethan 𝑘 − 𝜎 − 1 state vertices in 𝑇(𝑆). This implies there exista corresponding set �� of 𝑘 − 𝜎 vertices in the vertex set of thegraphG(𝐴, 𝐵) such that there are nomore than 𝑘−𝜎−1 statevertices in 𝑇(��). Therefore, there is “dilation” in G(𝐴, 𝐵). ByLemma 7, the linear system (1) is not structurally controllable.
It is easy to prove the sufficiency as in the discussionabove. Thus, the proof of the theorem is complete.
4. Some Examples
There are two examples being presented in this section toillustrate the theoretical results.
Example 1. Consider a linear control system without time-delays with the structured matrices given by
𝐴 =(
1
3
1
3
0
2
3
1
3
2
3
0
1
3
1
3
),
𝐵 = (
1
0
0
) .
(13)
We first consider the case that the message leaving statenode 𝑥
1takes 3 iterations to reach state node 𝑥
2and the
message leaving state node 𝑥3takes also 3 iterations to reach
state node 𝑥2. Then, the linear control system with delays by
inserting delay nodes is transformed into a correspondinglinear system without time-delay with the correspondingstructured matrices given by
A =
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
1
3
1
3
0 0 0 0 0 0 0
0
1
3
0 0 0 1 0 0 1
0
1
3
1
3
0 0 0 0 0 0
2
3
0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0
0 0 0 0 1 0 0 0 0
0 0
2
3
0 0 0 0 0 0
0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1 0
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
,

6 Mathematical Problems in Engineering
B =
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
1
0
0
0
0
0
0
0
0
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
.
(14)
The directed graphs G(𝐴, 𝐵) and G(A,B) can be seen inFigure 2.
We then construct a linear structured system (A,B)with the same structure as (A,B); its controllable matricesare assumed to be (A,B) withA given by
A
=
(
(
(
(
(
(
(
(
(
(
(
(
(
(
𝛼11𝛼120 0 0 0 0 0 0
0 𝛼220 0 0 𝛼
260 0 𝛼
29
0 𝛼32𝛼330 0 0 0 0 0
𝛼410 0 0 0 0 0 0 0
0 0 0 𝛼540 0 0 0 0
0 0 0 0 𝛼650 0 0 0
0 0 𝛼730 0 0 0 0 0
0 0 0 0 0 0 𝛼870 0
0 0 0 0 0 0 0 𝛼980
)
)
)
)
)
)
)
)
)
)
)
)
)
)
.
(15)
Selecting
𝑃 =
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
1
1
1
1
𝛼26𝛼65𝛼54
1
𝛼26𝛼65
1
𝛼26
1
𝛼29𝛼98𝛼87
1
𝛼29𝛼98
1
𝛼29
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
, (16)
by simple calculation we obtain
A = 𝑃−1
A𝑃 =
(
(
(
(
(
(
(
(
(
(
(
(
(
(
∗ ∗ 0 0 0 0 0 0 0
0 ∗ 0 0 0 1 0 0 1
0 ∗ ∗ 0 0 0 0 0 0
∗ 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0
0 0 0 0 1 0 0 0 0
0 0 ∗ 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1 0
)
)
)
)
)
)
)
)
)
)
)
)
)
)
, (17)
where ∗ are non-zero elements and A is the controllabilitymatrix ofA.
Example 2. Consider another linear control system withouttime-delay with the structured matrices given by
𝐴 =(
1
3
2
3
0
1
3
1
3
1
3
0
2
3
1
3
),
𝐵 = (
1
0
0
) .
(18)

Mathematical Problems in Engineering 7
x1
x2
x3
u1
(a)
x1
x2
x3d2 d3 d4
d5
d6
d1
u1
(b)
Figure 2: (a) A directed graph with 3 state nodes. (b) The directed graph when we add a delay of 3 on the edge (𝑥1, 𝑥2) and add a delay of 3
on the edge (𝑥3, 𝑥2).
x1
x2
x3
u1
(a)
x1
x2
x3
d2
d3
d4
d5
d6
d1
u1
(b)
Figure 3: (a) A directed graph with 3 state nodes. (b) The directed graph when we add a delay of 3 on the edge (𝑥2, 𝑥1) and add a delay of 3
on the edge (𝑥2, 𝑥3).
We then consider the case that the message leaving statenode 𝑥
2takes 3 iterations to reach state node 𝑥
1and the
message leaving state node 𝑥2also takes 3 iterations to reach
state node 𝑥3. Then, the linear control system with delays by
inserting delay nodes is transformed into a correspondinglinear system without time-delay with the correspondingstructured matrices given by
A =
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
1
3
0 0 0 0 1 0 0 0
1
3
1
3
1
3
0 0 0 0 0 0
0 0
1
3
0 0 0 0 0 1
0
2
3
0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0
0 0 0 0 1 0 0 0 0
0
2
3
0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1 0
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
,
B =
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
1
0
0
0
0
0
0
0
0
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
.
(19)
The directed graphs G(𝐴, 𝐵) and G(A,B) can be seen inFigure 3.
We then construct a linear structured system (A,B)with the same structure as (A,B); its controllable matricesare assumed to be (A,B) withA given by

8 Mathematical Problems in Engineering
A
=
(
(
(
(
(
(
(
(
(
(
(
(
(
(
𝛼110 0 0 0 𝛼
160 0 0
𝛼21𝛼22𝛼230 0 0 0 0 0
0 0 𝛼330 0 0 0 0 𝛼
39
0 𝛼420 0 0 0 0 0 0
0 0 0 𝛼540 0 0 0 0
0 0 0 0 𝛼650 0 0 0
0 𝛼720 0 0 0 0 0 0
0 0 0 0 0 0 𝛼870 0
0 0 0 0 0 0 0 𝛼980
)
)
)
)
)
)
)
)
)
)
)
)
)
)
.
(20)
Selecting
𝑃 =
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
(
1
1
1
1
𝛼16𝛼65𝛼54
1
𝛼16𝛼65
1
𝛼16
1
𝛼39𝛼98𝛼87
1
𝛼39𝛼98
1
𝛼39
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
, (21)
by simple calculation we obtain
A = 𝑃−1
A𝑃 =
(
(
(
(
(
(
(
(
(
(
(
(
(
(
∗ 0 0 0 0 1 0 0 0
∗ ∗ ∗ 0 0 0 0 0 0
0 0 ∗ 0 0 0 0 0 1
0 ∗ 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0
0 0 0 0 1 0 0 0 0
0 ∗ 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1 0
)
)
)
)
)
)
)
)
)
)
)
)
)
)
, (22)
where ∗ are nonzero elements, which is the controllabilitymatrix ofA.
5. Summary and Future Work
The structural controllability analysis for discrete-time linearcontrol systems with time-delay is discussed in the paper.We derive necessary and sufficient conditions for the linear
delayed systems to be structurally controllable by transform-ing the delayed systems into a corresponding linear systemwithout time-delay. This method is suitable for the discrete-time linear delayed systems; the structural controllability forthe continuous-time linear delayed systems is also an issue weare concern with.We look forward tomaking some results oncontinuous-time systems.
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper.
Acknowledgments
The authors gratefully acknowledge the support of the Foun-dation Research Funds for the Central Universities underGrant no. 3122014K008, the Natural Science Foundation ofChina under Grant no. 61174094, and the Tianjin NaturalScience Foundation under Grant no. 14JCYBJC18700.

Mathematical Problems in Engineering 9
References
[1] J. Klamka, “Constrained controllability of semilinear systemswith delayed controls,”Bulletin of the PolishAcademy of Sciences:Technical Sciences, vol. 56, no. 4, pp. 333–337, 2008.
[2] J. Klamka, “Constrained controllability of semilinear systems,”Nonlinear Analysis: Theory, Methods & Applications, vol. 47, no.5, pp. 2939–2949, 2001.
[3] J. Klamka, “Relative and absolute controllability of discretesystems with delays in control,” International Journal of Control,vol. 26, no. 1, pp. 65–74, 1977.
[4] B. Jakubczyk and E. D. Sontag, “Controllability of nonlineardiscrete-time systems: a Lie algebraic approach,” SIAM Journalon Control and Optimization, vol. 28, no. 1, pp. 1–33, 1990.
[5] R. Kalman, “Controllability of linear dynamical systems,” Con-tributions to Differential Equations, vol. 1, pp. 189–213, 1962.
[6] R. E. Kalman, “Mathematical description of linear dynamicalsystems,” Journal of the Society for Industrial & Applied Mathe-matics Series A: Control, vol. 1, no. 2, pp. 152–192, 1963.
[7] Y. Liu and S. Zhao, “Controllability for a class of linear time-varying impulsive systems with time delay in control input,”IEEE Transactions on Automatic Control, vol. 56, no. 2, pp. 395–399, 2011.
[8] S. Zhao and J. Sun, “Controllability and observability forimpulsive systems in complex fields,” Nonlinear Analysis. RealWorld Applications, vol. 11, no. 3, pp. 1513–1521, 2010.
[9] C. T. Lin, “Structural controllability,” IEEE Transactions onAutomatic Control, vol. 19, no. 3, pp. 201–208, 1974.
[10] R. W. Shields and J. B. Pearson, “Structural controllability ofmultiinput linear systems,” IEEE Transactions on AutomaticControl, vol. 21, no. 2, pp. 203–212, 1976.
[11] W. Gao, Y. Wang, and A. Homaifa, “Discrete-time variablestructure control systems,” IEEE Transactions on IndustrialElectronics, vol. 42, no. 2, pp. 117–122, 1995.
[12] G. Reissig, C. Hartung, and F. Svaricek, “Strong structural con-trollability and observability of linear time-varying systems,”IEEE Transactions on Automatic Control, vol. 59, no. 11, pp.3087–3092, 2014.
[13] X. Liu, H. Lin, and B. M. Chen, “Structural controllability ofswitched linear systems,” Automatica, vol. 49, no. 12, pp. 3531–3537, 2013.
[14] Y. Liu, H.-W. Chen, and J.-Q. Lu, “Data-based controllabilityanalysis of discrete-time linear time-delay systems,” Interna-tional Journal of Systems Science, vol. 45, no. 11, pp. 2411–2417,2014.
[15] L. Weiss, “On the controllability of delay-differential systems,”SIAM Journal on Control and Optimization, vol. 5, no. 4, pp.575–587, 1967.
[16] S. Yi, P. W. Nelson, and A. G. Ulsoy, “Controllability andobservability of systems of linear delay differential equationsvia the matrix Lambert W function,” IEEE Transactions onAutomatic Control, vol. 53, no. 3, pp. 854–860, 2008.
[17] Z. Ji, H. Lin, and T. H. Lee, “Controllability of multi-agentsystems with switching topology,” in Proceedings of the IEEEInternational Conference on Robotics, Automation and Mecha-tronics (RAM ’08), pp. 421–426, Chengdu, China, September2008.
[18] H. Shi, G. Xie, and W. Luo, “Controllability of linear discrete-time systems with both delayed states and delayed inputs,”Abstract and Applied Analysis, vol. 2013, Article ID 975461, 5pages, 2013.
[19] Z. Ji, Z. Wang, H. Lin, and Z. Wang, “Controllability of multi-agent systems with time-delay in state and switching topology,”International Journal of Control, vol. 83, no. 2, pp. 371–386, 2010.

Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of