Research Article Shape-Free Finite Element Method: Another Way … · 2019. 7. 31. · formulae of...
15
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2013, Article ID 491626, 14 pages http://dx.doi.org/10.1155/2013/491626 Research Article Shape-Free Finite Element Method: Another Way between Mesh and Mesh-Free Methods Song Cen, 1,2,3 Ming-Jue Zhou, 1 and Yan Shang 1 1 Department of Engineering Mechanics, School of Aerospace, Tsinghua University, Beijing 100084, China 2 High Performance Computing Center, School of Aerospace, Tsinghua University, Beijing 100084, China 3 Key Laboratory of Applied Mechanics, School of Aerospace, Tsinghua University, Beijing 100084, China Correspondence should be addressed to Song Cen; [email protected] Received 25 June 2013; Accepted 18 July 2013 Academic Editor: Zhiqiang Hu Copyright © 2013 Song Cen et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Performances of the conventional finite elements are closely related to the mesh quality. Once distorted elements are used, the accuracy of the numerical results may be very poor, or even the calculations have to stop due to various numerical problems. Recently, the author and his colleagues developed two kinds of finite element methods, named hybrid stress-function (HSF) and improved unsymmetric methods, respectively. e resulting plane element models possess excellent precision in both regular and severely distorted meshes and even perform very well under the situations in which other elements cannot work. So, they are called shape-free finite elements since their performances are independent to element shapes. ese methods may open new ways for developing novel high-performance finite elements. Here, the thoughts, theories, and formulae of above shape-free finite element methods were introduced, and the possibilities and difficulties for further developments were also discussed. 1. Introduction As the cornerstone of computational mechanics and mathe- matics, the finite element method (FEM) has been considered as one of the greatest academic achievements in the last century [1, 2]. Over the past 60 years, with the progress in techniques of computers, the FEM has obtained remarkable developments in theories and applications, and became one of the main tools for computations and numerical simulations of science and engineering. However, it should be pointed out that, the FEM is a kind of numerical piecewise interpolation methods, so that its performance oſten depends on the mesh quality. For example, the accuracy of most conventional finite elements may drop dramatically once the mesh is distorted [3, 4], and this phenomenon will lead to incorrect results or interruption of computations due to numerical difficulties. Since the mesh distortions are unavoidable for complex geometry and large deformation problems, the sensitivity problem to mesh distortion has been regarded as one of the severest defects existing in the FEM. In order to circumvent above trouble caused by mesh, numerous researchers began to develop so-called meshless or mesh-free approaches to replace the FEM, such as the element-free Galerkin method [5], the reproducing kernel particle method [6], the meshless local Petrov-Galerkin (MLPG) and the local boundary integral equation (LBIE) methods [7], the boundary node method [8], the hybrid boundary node method [9], the least-squares collocation meshless method [10], the PU-based meshless Shepard inter- polation method [11]. ese methods can produce excellent results without meshing (only distributed points are needed for most cases), so that they are free of many numerical prob- lems aroused by the FEM mesh. However, since higher order interpolations and more complicated techniques are oſten used, these methods usually need much more computation costs, which is not acceptable for applications of large-scale engineering problems, especially for nonlinear problems. erefore, at present, besides several special problems, the meshless or mesh-free methods have not completely taken the place of the FEM yet. On the other hand, during the history of the FEM itself, numerous efforts have been also made for improving performance and robustness of the traditional finite element models, such as the hybrid stress method proposed by
Transcript of Research Article Shape-Free Finite Element Method: Another Way … · 2019. 7. 31. · formulae of...

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013, Article ID 491626, 14 pageshttp://dx.doi.org/10.1155/2013/491626
Research ArticleShape-Free Finite Element Method: Another Way betweenMesh and Mesh-Free Methods
Song Cen,1,2,3 Ming-Jue Zhou,1 and Yan Shang1
1 Department of Engineering Mechanics, School of Aerospace, Tsinghua University, Beijing 100084, China2High Performance Computing Center, School of Aerospace, Tsinghua University, Beijing 100084, China3 Key Laboratory of Applied Mechanics, School of Aerospace, Tsinghua University, Beijing 100084, China
Correspondence should be addressed to Song Cen; [email protected]
Received 25 June 2013; Accepted 18 July 2013
Academic Editor: Zhiqiang Hu
Copyright © 2013 Song Cen et al.This is an open access article distributed under theCreative CommonsAttribution License, whichpermits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Performances of the conventional finite elements are closely related to the mesh quality. Once distorted elements are used, theaccuracy of the numerical results may be very poor, or even the calculations have to stop due to various numerical problems.Recently, the author and his colleagues developed two kinds of finite element methods, named hybrid stress-function (HSF) andimproved unsymmetric methods, respectively. The resulting plane element models possess excellent precision in both regular andseverely distorted meshes and even perform very well under the situations in which other elements cannot work. So, they are calledshape-free finite elements since their performances are independent to element shapes. These methods may open new ways fordeveloping novel high-performance finite elements. Here, the thoughts, theories, and formulae of above shape-free finite elementmethods were introduced, and the possibilities and difficulties for further developments were also discussed.
1. Introduction
As the cornerstone of computational mechanics and mathe-matics, the finite elementmethod (FEM) has been consideredas one of the greatest academic achievements in the lastcentury [1, 2]. Over the past 60 years, with the progress intechniques of computers, the FEM has obtained remarkabledevelopments in theories and applications, and became oneof themain tools for computations andnumerical simulationsof science and engineering. However, it should be pointed outthat, the FEM is a kind of numerical piecewise interpolationmethods, so that its performance often depends on the meshquality. For example, the accuracy ofmost conventional finiteelements may drop dramatically once the mesh is distorted[3, 4], and this phenomenon will lead to incorrect results orinterruption of computations due to numerical difficulties.Since the mesh distortions are unavoidable for complexgeometry and large deformation problems, the sensitivityproblem to mesh distortion has been regarded as one of theseverest defects existing in the FEM.
In order to circumvent above trouble caused by mesh,numerous researchers began to develop so-called meshless
or mesh-free approaches to replace the FEM, such as theelement-free Galerkin method [5], the reproducing kernelparticle method [6], the meshless local Petrov-Galerkin(MLPG) and the local boundary integral equation (LBIE)methods [7], the boundary node method [8], the hybridboundary node method [9], the least-squares collocationmeshless method [10], the PU-based meshless Shepard inter-polation method [11]. These methods can produce excellentresults without meshing (only distributed points are neededfor most cases), so that they are free of many numerical prob-lems aroused by the FEMmesh. However, since higher orderinterpolations and more complicated techniques are oftenused, these methods usually need much more computationcosts, which is not acceptable for applications of large-scaleengineering problems, especially for nonlinear problems.Therefore, at present, besides several special problems, themeshless or mesh-free methods have not completely takenthe place of the FEM yet.
On the other hand, during the history of the FEMitself, numerous efforts have been also made for improvingperformance and robustness of the traditional finite elementmodels, such as the hybrid stress method proposed by

2 Mathematical Problems in Engineering
Pian et al. [12–14], the incompatible displacement modesproposed by Wilson et al. [15] and Taylor et al. [16], theenhanced strainmethod proposed by Simo and Rifai [17], thestabilization method proposed by Belytschko and Bacharch[18], the selectively reduced integration scheme proposedby Hughes [19], the assumed strain formulations proposedby MacNeal [20] and Piltner and Taylor [21], the quasi-conforming element method proposed by Tang et al. [22],the generalized conforming method proposed by Long andHuang [23], the Alpha finite element method (𝛼FEM) [24]and the smoothed finite element method (S-FEM) [25, 26]proposed by Liu et al., the new spline finite element method[27] proposed by Chen et al., the FE-mesh-free elementmethod proposed byRajendran et al. [28, 29], the newnaturalcoordinate methods proposed by Long et al. [30–37], andthe Hamilton hybrid tress element method proposed by Cenet al. [38]. These works made great contributions on thefinite element method. However, the sensitivity problem tomesh distortion has never been overcome from the outset.For example, once a quadrilateral element almost degeneratesinto a triangle or becomes a concave quadrangle, the accuracywill be lost greatly, or even the computation has to be stoppeddue to the numerical difficulties.
Recently, two mesh distortion immune techniques wereproposed by the author and his coworkers. The first one isthe hybrid stress-function (HSF) element method [39–42],which can be treated as the improved version for the initialhybrid stress element method proposed by Pian [12]. It startsfrom the principle of minimum complementary energy andemploys the fundamental analytical solutions of the Airystress function as the trial functions (analytical trial functionmethod). The second one is the improved unsymmetricelement method [43], which can solve the interpolationfailure and rotational frame dependence problems existingin the original unsymmetric element method proposed byRajendran et al. [44–46] and can produce more accurateresults. It is based on the virtual work principle and used twodifferent strain matrices in the final formulae: one is from theconventional isoparametric element, and the other is derivedfrom the fundamental analytical solutions of elasticity.
The element models constructed by above methods pos-sess excellent precision in both regular and severely distortedmeshes, and even perform very well under the situationsin which other elements cannot work (e.g., a quadrilateralelement degenerates into triangular or concave quadrangularshapes). So, they are called shape-free finite elements sincetheir performances are independent to the element shapes. Itis very interesting that effective ways for completely avoidingsensitivity problem to mesh distortion may be found.
In the following sections, the thoughts, theories, andformulae of the shape-free finite element methods will beintroduced, and the possibilities and difficulties for furtherdevelopments were also discussed.
2. Fundamental Analytical Solutions forTrial Functions
The fundamental analytical solutions of the mechanics playimportant roles in both the hybrid stress-function (HSF)
and the improved unsymmetric element methods. For planeproblem without body forces (or with only constant bodyforces), the analytical solutions 𝜙
𝑖of the Airy stress function
𝜙 should satisfy the Beltrami-Michell equation (the compati-bility equation expressed in terms of stress function). For theisotropic case, the equation is written as
∇4𝜙𝑖=
𝜕4𝜙𝑖
𝜕𝑥4+ 2
𝜕4𝜙𝑖
𝜕𝑥2𝜕𝑦2+
𝜕4𝜙𝑖
𝜕𝑦4= 0, (1)
and for the anisotropic case, the equation becomes
𝐶11
𝜕4𝜙𝑖
𝜕𝑦4+ 𝐶22
𝜕4𝜙𝑖
𝜕𝑥4+ (2𝐶
12+ 𝐶66)
𝜕4𝜙𝑖
𝜕𝑥2𝜕𝑦2
− 2𝐶16
𝜕4𝜙𝑖
𝜕𝑥𝜕𝑦3− 2𝐶26
𝜕4𝜙𝑖
𝜕𝑥3𝜕𝑦
= 0,
(2)
where 𝐶𝑖𝑗= 𝐶𝑗𝑖are the reduced elastic compliances and have
been defined in [41].The fundamental analytical solutions𝜙
𝑖can be used as the
trial function in finite element method or other numericalmethods. In order to choose appropriate number of thesolutions for the construction of new element model, twoprinciples must be followed: (i) the fundamental analyticalsolutions should be selected in turn from the lowest-orderto higher-order; and (ii) the resulting stress or displacementfields should possess completeness in Cartesian coordinates.In plane elasticity, there are 3 solutions corresponding tothe rigid-body displacement state, 3 for the constant stressstate (linear displacement state), and 4 for each other higherorder stress or displacement state. As an example, the first18 solutions 𝜙
𝑖(𝑖 = 1 ∼ 18) and resulting stresses and
displacements for isotropic case are given in Table 1.
3. Shape-Free FEM I: Plane HybridStress-Function (HSF) Element
3.1. The Construction Procedure for 2D Hybrid Stress-FunctionElements. For a plane finite element model, its complemen-tary energy functional can be written in the following matrixform [12, 39–42]:
Π𝐶= Π∗
𝐶+ 𝑉∗
𝐶=
1
2
∬
𝐴𝑒
𝜎TC𝜎𝑡 d𝐴 − ∫
Γ𝑒
TTu𝑡 d𝑠, (3)
Π∗
𝐶=
1
2
∬
𝐴𝑒
𝜎TC𝜎𝑡 d𝐴, 𝑉
∗
𝐶= −∫
Γ𝑒
TTu𝑡 d𝑠, (4)
𝜎 =
{
{
{
𝜎𝑥
𝜎𝑦
𝜏𝑥𝑦
}
}
}
, T = {
𝑇𝑥
𝑇𝑦
} , u = {
𝑢
V} , (5)
where Π∗𝐶is the complementary energy within the element;
𝑉∗
𝐶is the complementary energy along the kinematic bound-
aries (here, all element boundaries are treated as the kine-matic boundaries because the boundary displacements willbe prescribed in (6);C is the elasticity matrix of compliances,it possesses different forms for isotropic and anisotropiccases, or for plane strain and plane stress states; t is the

Mathematical Problems in Engineering 3
Table1:Eighteen
fund
amentalanalyticalsolutio
nsof
theA
irystr
essfun
ctionandresulting
stressa
nddisplacementsolutions
forp
lane
stressprob
lems∗.
i𝜙𝑖
𝜎𝑥𝑖
𝜎𝑦𝑖
𝜏𝑥𝑦𝑖
𝑈𝑖
𝑉𝑖
11
00
01/E
02
x0
00
01/E
3y
00
0y/E
−x/E
4x2
02
0−2𝜇
x/E
2y/E
5xy
00
−1
−(1+𝜇)y/E
−(1+𝜇)x/E
6y2
20
02x/E
−2𝜇
y/E
7x3
06x
0−3(𝜇x2
+y2)/E
6xy/E
8x2y
02y
−2x
−2𝜇
xy/E
[y2 −
(2+𝜇)x
2 ]/E
9xy
22x
0−2y
[𝑥2−(2+𝜇)𝑦2]/𝐸
−2𝜇
xy/E
10y3
6y0
06xy/E
−3(𝜇y2
+x2)/E
11x3y
06xy
−3x
2−(3𝜇x2y+
y3)/E
[3𝑥𝑦2−(2+𝜇)𝑥3]/𝐸
12xy
36xy
0−3y
2[3x2y−
(2+𝜇)y
3 ]/E
−(3𝜇x2y+
y3)/E
13𝑥4−𝑦4
−12y2
12x2
0−4(3xy2+𝜇x3)/E
4(3x
2 y+𝜇y3)/E
146𝑥2𝑦2−𝑥4−𝑦4
12(𝑥2−𝑦2)
−12(𝑥2−𝑦2)
−24xy
4(1+
𝜇)(𝑥3−3𝑥𝑦2)/E
4(1+
𝜇)(𝑦3−3𝑥2𝑦)/E
15𝑥3𝑦2−𝑥𝑦4
2x(𝑥2−6𝑦2)
6xy2
−2y(3𝑥2−2𝑦2)
[𝑥4−6(2
+𝜇)x
2 y2+(3
+2𝜇
)y4 ]/2E
[2(1+2𝜇
)𝑥𝑦3−2𝜇x3y]/E
165𝑥3𝑦2−𝑥5
10x3
−10x(2𝑥2−3𝑦2)
−30x2y
2.5[(1+2𝜇
)𝑥4−6𝜇x2y2−y4]/E
10xy[𝑦2−(2+𝜇)𝑥2]/E
17𝑥2𝑦3−𝑥4𝑦
6x2 y
−2y(6𝑥2−𝑦2)
2x(2𝑥2−3𝑦2)
[2(1+2𝜇
)x3 𝑦
−2𝜇xy
3 ]/E
[𝑦4−6(2
+𝜇)x
2 y2+(3+2𝜇)x
4 ]/2E
185𝑥2𝑦3−𝑦5
10y(3𝑥2−2𝑦2)
10y3
−30xy
210xy[x
2 −(2
+𝜇)y
2 ]/E
2.5[(1+2𝜇
)𝑦4−6𝜇x2y2−x4]/E
∗Note:𝐸→𝐸/(1−𝜇2)and𝜇→𝜇/(1−𝜇)forp
lane
strainprob
lem.E
and𝜇areY
oung’smod
ulus
andPo
isson’sratio
,respectively
.

4 Mathematical Problems in Engineering
thickness of the element; 𝜎, the element stress vector; T, thetraction force vector along the element boundaries; u, thedisplacement vector along element boundaries, which can beinterpolated by the element nodal displacement vector q𝑒:
u = N|Γq𝑒, (6)
where matrix N|Γis the interpolation function matrix for
element boundary displacements.The stress vector 𝜎 in (5) can be derivable from the Airy
stress function 𝜙, that is,
𝜎 =
{
{
{
𝜎𝑥
𝜎𝑦
𝜏𝑥𝑦
}
}
}
=
{{{{{{{{{{{
{{{{{{{{{{{
{
𝜕2𝜙
𝜕𝑦2
𝜕2𝜙
𝜕𝑥2
−
𝜕2𝜙
𝜕𝑥𝜕𝑦
}}}}}}}}}}}
}}}}}}}}}}}
}
=R (𝜙) . (7)
And the traction force vector T in (5) can be written as
T = {
𝑇𝑥
𝑇𝑦
} = [
𝑙 0 𝑚
0 𝑚 𝑙]
{
{
{
𝜎𝑥
𝜎𝑦
𝜏𝑥𝑦
}
}
}
= LR (𝜙) with L = [
𝑙 0 𝑚
0 𝑚 𝑙] ,
(8)
where 𝑙 and𝑚 are the direction cosines of the outer normal 𝑛of the element boundaries.
Substituting (7) and (8) into (3) yields
Π𝐶= Π∗
𝐶+ 𝑉∗
𝐶=
1
2
∬
𝐴𝑒
R(𝜙)TCR (𝜙) 𝑡 d𝐴
− ∫
Γ
[LR (𝜙)]
Tu𝑡 d𝑠.
(9)
Let
𝜙 =
𝑁
∑
𝑖=1
𝜙𝑖+3𝛽𝑖= 𝜑𝛽, (10)
with
𝜑 = [𝜙4𝜙5𝜙6⋅ ⋅ ⋅ ⋅ ⋅ ⋅ 𝜙
𝑁+3] ,
𝛽 = [𝛽1𝛽2𝛽3⋅ ⋅ ⋅ ⋅ ⋅ ⋅ 𝛽
𝑁]T,
(11)
where 𝑁 is the number of the fundamental analytical solu-tions used for stress function𝜙 in (10);𝜙
𝑖(𝑖 = 4 ∼ 𝑁+3) are𝑁
fundamental analytical solutions (in Cartesian coordinates)of the Airy stress function 𝜙, which must be selected fromcomplete second-order terms (𝑥2,𝑦2,𝑥𝑦) to complete higher-order terms (see Table 1); 𝛽
𝑖(𝑖 = 1 ∼ 𝑁) are 𝑁 unknown
constants. Obviously, such trial functions will directly lead tomore reasonable stress fields satisfying both equilibrium andcompatibility conditions.
Substitution of (6) and (10) into (9) yields
Π𝐶= Π∗
𝐶+ 𝑉∗
𝐶=
1
2
𝛽TM𝛽 − 𝛽THq𝑒, (12)
M = ∬
𝐴𝑒
STCS𝑡 d𝐴, H = ∫
Γ
STLTN𝑡 d𝑠 (13)
with
S =
[
[
[
[
[
[
[
[
[
[
[
[
𝜕2𝜙4
𝜕𝑦2
𝜕2𝜙5
𝜕𝑦2
⋅ ⋅ ⋅
𝜕2𝜙𝑁+3
𝜕𝑦2
𝜕2𝜙4
𝜕𝑥2
𝜕2𝜙5
𝜕𝑥2
⋅ ⋅ ⋅
𝜕2𝜙𝑁+3
𝜕𝑥2
−
𝜕2𝜙4
𝜕𝑥𝜕𝑦
−
𝜕2𝜙5
𝜕𝑥𝜕𝑦
⋅ ⋅ ⋅ −
𝜕2𝜙𝑁+3
𝜕𝑥𝜕𝑦
]
]
]
]
]
]
]
]
]
]
]
]
=[
[
𝜎𝑥4
𝜎𝑥5
𝜎𝑥6
⋅ ⋅ ⋅ 𝜎𝑥(𝑁+3)
𝜎𝑦4
𝜎𝑦5
𝜎𝑦6
⋅ ⋅ ⋅ 𝜎𝑦(𝑁+3)
𝜏𝑥𝑦4
𝜏𝑥𝑦5
𝜏𝑥𝑦6
⋅ ⋅ ⋅ 𝜏𝑥𝑦(𝑁+3)
]
]
,
(14)
where 𝜎𝑥𝑖, 𝜎𝑦𝑖and 𝜏𝑥𝑦𝑖
(𝑖 = 4 ∼ 𝑁 + 3) are the correspondingstresses of 𝜙
𝑖(𝑖 = 4 ∼ 𝑁 + 3) (see Table 1), and all are
expressed in Cartesian coordinates.According to the principle of minimum complementary
energy, we require
𝜕Π𝐶
𝜕𝛽
= 0. (15)
Then, the unknown constant vector 𝛽 can be expressed interms of the nodal displacement vector q𝑒:
𝛽 = M−1Hq𝑒. (16)
Substitution of (16) into the Π∗𝐶in (12) yields
Π∗
𝐶=
1
2
q𝑒TK∗q𝑒,
K∗ = (M−1H)TH = HTM−1H.
(17)
From the viewpoint of the element definition given in [12],matrixK∗mentioned earlier can be considered as the stiffnessmatrix of the hybrid stress-function element, and therefore, itcan readily be incorporated into the standard finite elementprogram framework.
Once the element nodal displacement vector q𝑒 is solved,the element stresses can be given by
𝜎 = SM−1Hq𝑒. (18)
3.2. A Typical HSF Element HSF-Q8-15𝛽 [40]. Up to present,several plane HSF element models for both isotropic andanisotropic materials, including 8-node and 12-node quadri-lateral elements [39–41], have been successfully developed.Asan example, the 8-node HSF element using 15𝛽, denoted byHSF-Q8-15𝛽 [40], is introduced here.

Mathematical Problems in Engineering 5
𝜉
𝜂
1(−1, −1) 2(1, −1)
4(−1, 1)
5(0, −1)
7(0, 1)
8(−1, 0) 6(1, 0)
3(1, 1)
(a)
4
1
2
3
5
68
7
u2
�4
u1
�1
u3
�3
u4
u5
�5
u6
�6
u7
�7
u8
�8
�2
(b)
x
y
4
12
3
5
6
7
8
(c)
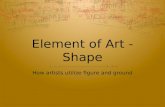
(d) (e)Figure 1: 8-node quadrilateral plane element with arbitrary shapes.
Consider an 8-node quadrilateral element shown inFigure 1, and any edge of the element can be either straightor curved, and (𝜉, 𝜂) are the usual isoparametric coordinates.
Differing from the usual models, the element shapes can beeither convex or concave. The element nodal displacementvector q𝑒 is given by
q𝑒 = [𝑢1
V1
𝑢2
V2
𝑢3
V3
𝑢4
V4
𝑢5
V5
𝑢6
V6
𝑢7
V7
𝑢8
V8]T. (19)
Assume that the displacements along each element edgeare interpolated by the nodal displacements of each edge.Therefore, 𝑢, V and corresponding matrixN (see (6) and (12))of each element edge can be given as follows:
u12= {
𝑢
V}
12
= N|𝜂=−1q𝑒, u
23= {
𝑢
V}
23
= N|𝜉=1q𝑒,
u34= {
𝑢
V}
34
= N|𝜂=1q𝑒, u
41= {
𝑢
V}
41
= N|𝜉=−1q𝑒,
(20)
with
N = [
𝑁0
10 𝑁
0
20 ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ 𝑁
0
80
0 𝑁0
10 𝑁
0
2⋅ ⋅ ⋅ ⋅ ⋅ ⋅ 0 𝑁
0
8
] , (21)
in which 𝑁0
𝑖(𝜉, 𝜂) (𝑖 = 1 ∼ 8) are the shape functions of the
plane 8-node isoparametric serendipity elements
𝑁0
𝑖=
{{{{{{{{{
{{{{{{{{{
{
−
1
4
(1 + 𝜉𝑖𝜉)(1 + 𝜂
𝑖𝜂)(1 − 𝜉
𝑖𝜉 − 𝜂𝑖𝜂) (𝑖 = 1, 2, 3, 4)
1
2
(1 − 𝜉2) (1 + 𝜂
𝑖𝜂) (𝑖 = 5, 7)
1
2
(1 − 𝜂2) (1 + 𝜉
𝑖𝜉) (𝑖 = 6, 8) ,
(22)
where (𝜉𝑖, 𝜂𝑖) are the isoparametric coordinates of node 𝑖.
Fifteen analytical solutions 𝜙𝑖(𝑖 = 4 ∼ 18) for the stress
function 𝜙 (see (10)), which have been listed in Table 1, aretaken as the trial functions. That is to say, fifteen unknownconstants 𝛽
𝑖are introduced. Then, the matrix S in (14) is a
3×15matrix. It can be seen that the stress fields possess third-order completeness in both 𝑥 and 𝑦. The resulting elementmodel is denoted as HSF-Q8-15𝛽.
In order to evaluate the matrices M and H by Gaus-sian numerical integration procedure, the Cartesian coor-dinates 𝑥 and 𝑦 within an element should be expressedin terms of local coordinates (isoparametric coordinates).Let
𝑥 =
8
∑
𝑖=1
𝑁0
𝑖(𝜉, 𝜂) 𝑥
𝑖, 𝑦 =
8
∑
𝑖=1
𝑁0
𝑖(𝜉, 𝜂) 𝑦
𝑖, (23)
where (𝑥𝑖, 𝑦𝑖) (𝑖 = 1 ∼ 8) are the Cartesian coordinates of the
node 𝑖.
Example 1 (pure bending for a cantilever beam (Figure 2)).As shown in Figure 2, a cantilever beam under plane stresscondition is subjected to a constant bending moment 𝑀.This problem was earlier used by Lee and Bathe [4] to assessthe distortion sensitivity of the quadratic plane elements.

6 Mathematical Problems in Engineering
M = 20c2:distributed as
fx =240y
c− 120x
(0, 0)
(0, c)
y
E = 107, 𝜇 = 0.3, t = 1.0M = 20c2
(50, 5)
(85, 3)
Mesh 4
Mesh 5
(51, 5.5) (55, 7)(30, 4)(66, 3)
Mesh 6
(0, 10)
(0, 0)
(100, 10)
(100, 0)
(0, 10)
(0, 0)
(100, 10)
(100, 0)(75, 10)
(25, 0)
Mesh 1
Mesh 2
(33, 6) (68, 7)
(35, 4) (66, 3)Mesh 3
(L, c)
(L, 0)
Figure 2: Pure bending problem for a cantilever beam.
The theoretical solutions for this problem are given by[47]:
𝜎𝑥=
240
𝑐
𝑦 − 120, 𝜎𝑦= 0, 𝜏
𝑥𝑦= 0,
𝑢 = −
120
𝐸
𝑥 +
240
𝑐𝐸
𝑥𝑦, V =36
𝐸
𝑦 −
120
𝑐𝐸
𝑥2−
36
𝑐𝐸
𝑦2.
(24)
Six regular and distorted mesh divisions are employed (seeFigure 2), inwhichmeshes 4, 5, and 6 are so severely distortedthat some quadrilateral elements degenerate into triangles orconcave quadrangles. Numerical results, obtained by presentelement HSF-Q8-15𝛽, 8-node isoparametric serendipity ele-ment Q8, 9-node isoparametric Lagrangian element Q9L, arelisted in Table 2. It can be seen that exact solutions can alwaysbe obtained by HS-F elements, no matter the meshes aredistorted or not, and nomatter the element shapes are convexor concave.
Actually, element HSF-Q8-15𝛽 can produce the exactsolutions for constant stress/strain problems, no matter theelement edges are straight or curved, and no matter theshapes of the elements are convex or concave. And so longas all element edges keep straight, element HSF-Q8-15𝛽can also produce the exact solutions for linear stress/strainproblems, no matter the shapes of the elements are convex orconcave. For higher-order problems, HSF-Q8-15𝛽 elementspossess much better convergence than the correspondingisoparametric elements.
3.3. A 4-Node HSF Quadrilateral Plane Membrane Elementwith Drilling Degrees of Freedom [42]. Consider a 4-nodequadrilateral element with drilling degrees of freedom shownin Figure 3. Differing from the usual displacement-based
Table 2: Results at selected locations for the pure bending problem(Figure 2).
Q8 Q9L HSF-Q8-15𝛽 Exact
Mesh 1𝜎𝑥(0, 10) 120.000 120.000 120.000 120.0
𝜎𝑥(0, 0) −120.000 −120.000 −120.000 −120.0
v(100, 0) × 103 −12.000 −12.000 −12.000 −12.0
Mesh 2𝜎𝑥(0, 10) 56.447 120.000 120.000 120.0
𝜎𝑥(0, 0) −74.863 −120.000 −120.000 −120.0
v(100, 0) × 103 −2.328 −12.000 −12.000 −12.0
Mesh 3
𝜎𝑥(0+, 10) 13.665 120.000 120.000 120.0
𝜎𝑥(0, 10
−) 5.262 120.000 120.000 120.0
𝜎𝑥(0, 0+) −5.665 −120.000 −120.000 −120.0
𝜎𝑥(0+, 0) −14.299 −120.000 −120.000 −120.0
v(100, 0) × 103 −0.477 −12.000 −12.000 −12.0
Mesh 4𝜎𝑥(0, 10) — — 120.000 120.0
𝜎𝑥(0, 0) — — −120.000 −120.0
v(100, 0) × 103 — — −12.000 −12.0
Mesh 5𝜎𝑥(0, 10) — — 120.000 120.0
𝜎𝑥(0, 0) — — −120.000 −120.0
v(100, 0) × 103 — — −12.000 −12.0
Mesh 6
𝜎𝑥(0+, 10) — — 120.000 120.0
𝜎𝑥(0, 10
−) — — 120.000 120.0
𝜎𝑥(0, 0+) — — −120.000 −120.0
𝜎𝑥(0+, 0) — — −120.000 −120.0
v(100, 0) × 103 — — −12.000 −12.0
models, the element shape is allowed to be either convex orconcave.The element nodal displacement vector q𝑒 is definedas

Mathematical Problems in Engineering 7
x
y
𝜉
𝜂
1(−1, −1) 2(1, −1)
3(1, 1)4(−1, 1)
u2
�4
u1
�1
u3
�3
u4
�2
𝜔4
𝜔3
𝜔1 𝜔212
34
Figure 3: A 4-node HSF quadrilateral plane membrane element with drilling degrees of freedom.
q𝑒 = [𝑢1
V1
𝜃𝑧1
𝑢2
V2
𝜃𝑧2
𝑢3
V3
𝜃𝑧3
𝑢4
V4
𝜃𝑧4]T, (25)
where 𝜃𝑧𝑖(𝑖 = 1 ∼ 4) are not the physical rotations of
the element nodes. Instead, the definitions of the drillingdegrees of freedom given by Allman [48] are employed. So,the element boundary displacements can be written as
{
𝑢
V}
𝑖𝑗
=
[
[
[
[
𝑁𝑖
0 −
(𝑦𝑗− 𝑦𝑖)
2
𝑁𝑖𝑁𝑗𝑁𝑗
0
(𝑦𝑗− 𝑦𝑖)
2
𝑁𝑖𝑁𝑗
0 𝑁𝑖
(𝑥𝑗− 𝑥𝑖)
2
𝑁𝑖𝑁𝑗
0 𝑁𝑗−
(𝑥𝑗− 𝑥𝑖)
2
𝑁𝑖𝑁𝑗
]
]
]
]
×
{{{{{{{
{{{{{{{
{
𝑢𝑖
V𝑖
𝜃𝑧𝑖
𝑢𝑗
V𝑗
𝜃𝑧𝑗
}}}}}}}
}}}}}}}
}
, (
𝑖 = 1, 2, 3, 4
𝑗 = 2, 3, 4, 1) ,
𝑁1=
1
2
(1 − 𝑠) , 𝑁2=
1
2
(1 + 𝑠) , −1 ≤ 𝑠 ≤ 1.
(26)
For matrix S defined in (14), let 𝑁 = 7, that is, the firstseven analytical solutions 𝜙
𝑖(𝑖 = 1 ∼ 7) for the stress function
𝜙, which have been listed in Table 1, are taken as the trialfunctions. Then, the matrix S is a 3 × 7 matrix. It can be seenthat the stress fields possess linear completeness in both𝑥 and𝑦. The resulting element model is denoted as HSF-Q4𝜃-7𝛽.
Example 2 (a wedge subjected to a uniformly distributedload (Figure 4)). As shown in Figure 4, a cantilever wedgeis subjected to a uniformly distributed load 𝑞. Because ofits triangular shape, the wedge can not be modeled withoutthe use of triangular and/or distorted quadrilateral elements.Since the present quadrilateral element HSF-Q4𝜃-7𝛽 canstill perform when its shape degenerates into triangle, it cantherefore be readily used to model such wedge problem.Numerical results and the percentage errors of the radialstresses at selected points are listed in Table 3. The present
element HSF-Q4𝜃-7𝛽 performs very well for such high-orderbending problem.
Other examples can be found in [42]. Actually, elementHSF-Q4𝜃-7𝛽 may be the best model among all the 4-nodequadrilateral plane membrane elements with drilling degreeof freedom.
4. Shape-Free FEM II: Improved UnsymmetricElement Method [43]
4.1. Brief Reviews on Original 8-Node Unsymmetric ElementUS-QUAD8 [44]. Based on the virtual work principle [44],the final element stiffness matrix (unsymmetric) can bewritten as [44–46]
K𝑒 = ∬
𝐴𝑒
BTDB𝑡 d𝐴 = ∬
1
−1
B∗T
|J|DB |J| 𝑡 d𝜉 d𝜂
= ∬
1
−1
B∗TDB𝑡 d𝜉 d𝜂,
(27)
where |J| is the Jacobian determinant; D is the elasticitymatrix;B is the element strainmatrix for conventional 8-nodeplane isoparametric element Q8:
B =
1
|J|B∗ = 1
|J|
×[
[
𝑁1,𝑥
0 𝑁2,𝑥
0 𝑁3,𝑥
0 ⋅ ⋅ ⋅ 𝑁8,𝑥
0
0 𝑁1,𝑦
0 𝑁2,𝑦
0 𝑁3,𝑦
⋅ ⋅ ⋅ 0 𝑁8,𝑦
𝑁1,𝑦
𝑁1,𝑥
𝑁2,𝑦
𝑁2,𝑥
𝑁3,𝑦
𝑁3,𝑥
⋅ ⋅ ⋅ 𝑁8,𝑦
𝑁8,𝑥
]
]
,
(28)
in which 𝑁𝑖(𝜉, 𝜂) (𝑖 = 1 ∼ 8) have been given by (22); B is
given by
B = [
𝑀1,𝑥
0 𝑀2,𝑥
0 𝑀3,𝑥
0 ⋅ ⋅ ⋅ 𝑀8,𝑥
0
0 𝑀1,𝑦
0 𝑀2,𝑦
0 𝑀3,𝑦
⋅ ⋅ ⋅ 0 𝑀8,𝑦
𝑀1,𝑦
𝑀1,𝑥
𝑀2,𝑦
𝑀2,𝑥
𝑀3,𝑦
𝑀3,𝑥
⋅ ⋅ ⋅ 𝑀8,𝑦
𝑀8,𝑥
] ,
(29)

8 Mathematical Problems in Engineering
A (0, 5)
E = 10000.0
𝜇 = 1.0/3.0
t = 1.0
B(1, 5)
10
2
q = 0.1
x
y
r
B
A
Typical mesh 1 × 6
10/24 10/24
The tip division of the mesh 2 × 12
10/48 10/48
The tip division of the mesh 4 × 24
𝜃
𝛼
Corner nodes of a quadrilateralFigure 4: A wedge subjected to a uniformly distributed load.
where 𝑀𝑖(𝑥, 𝑦) (𝑖 = 1 ∼ 8) are Cartesian shape functions,
given by
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
1 1 1 1 1 1 1 1
𝑥1
𝑥2
𝑥3
𝑥4
𝑥5
𝑥6
𝑥7
𝑥8
𝑦1
𝑦2
𝑦3
𝑦4
𝑦5
𝑦6
𝑦7
𝑦8
𝑥2
1𝑥2
2𝑥2
3𝑥2
4𝑥2
5𝑥2
6𝑥2
7𝑥2
8
𝑥1𝑦1𝑥2𝑦2𝑥3𝑦3𝑥4𝑦4𝑥5𝑦5𝑥6𝑦6𝑥7𝑦7𝑥8𝑦8
𝑦2
1𝑦2
2𝑦2
3𝑦2
4𝑦2
5𝑦2
6𝑦2
7𝑦2
8
𝑥2
1𝑦1𝑥2
2𝑦2𝑥2
3𝑦3𝑥2
4𝑦4𝑥2
5𝑦5𝑥2
6𝑦6𝑥2
7𝑦7𝑥2
8𝑦8
𝑥1𝑦2
1𝑥2𝑦2
2𝑥3𝑦2
3𝑥4𝑦2
4𝑥5𝑦2
5𝑥6𝑦2
6𝑥7𝑦2
7𝑥8𝑦2
8
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
×
{{{{{{{{{{
{{{{{{{{{{
{
𝑀1
𝑀2
𝑀3
𝑀4
𝑀5
𝑀6
𝑀7
𝑀8
}}}}}}}}}}
}}}}}}}}}}
}
=
{{{{{{{{{{{
{{{{{{{{{{{
{
1
𝑥
𝑦
𝑥2
𝑥𝑦
𝑦2
𝑥2𝑦
𝑥𝑦2
}}}}}}}}}}}
}}}}}}}}}}}
}
,
(30)
in which (𝑥𝑖, 𝑦𝑖) are the Cartesian coordinates of node 𝑖.
The resulting element model is denoted as US-QUAD8.It can keep producing exact solutions for constant andlinear stress/strain problems by using both regular andseverely distorted meshes. However, once the element isdistorted from quadrilateral to a certain shape, such as atriangle, the first matrix on the left hand of (30) will besingular, that is, interpolation failure will occur. Further-more, this element exhibits rotational frame dependence inhigher-order problems since the displacement fields con-structed by 𝑀
𝑖(𝑥, 𝑦) (𝑖 = 1 ∼ 8) are not compl-
ete.
4.2. The Shape-Free 8-Node Unsymmetric Element US-ATFQ8[43]. In [43], the above unsymmetric element method wasimproved by analytical trial function method. The elementdisplacement fields in terms of Cartesian coordinates areassumed as
u𝑒 = {
𝑢
V} = [
U UV V]{
��
𝛽
} = {
𝑢𝛼+ 𝑢𝛽
V𝛼+ V𝛽
} , (31)
in which
U = [𝑈1
𝑈2
𝑈3
𝑈4
𝑈5
𝑈6
𝑈7
𝑈8
𝑈9
𝑈10
𝑈11
𝑈12
𝑈13
𝑈14]
V = [𝑉1
𝑉2
𝑉3
𝑉4
𝑉5
𝑉6
𝑉7
𝑉8
𝑉9
𝑉10
𝑉11
𝑉12
𝑉13
𝑉14] ,
U = [𝑈15
𝑈16
𝑈17
𝑈18] ,
V = [𝑉15
𝑉16
𝑉17
𝑉18] ,
�� = [𝛼1
𝛼2
𝛼3
𝛼4
𝛼5
𝛼6
𝛼7
𝛼8
𝛼9
𝛼10
𝛼11
𝛼12
𝛼13
𝛼14]T,
𝛽 = [𝛽1
𝛽2𝛽3𝛽4]
T,
(32)

Mathematical Problems in Engineering 9
Table 3: HSF-Q4𝜃-7𝛽 results of radial stress at selected points for a wedge subjected to a uniformly distributed load (Figure 4).
Mesh 1 × 6 2 × 12 4 × 24 Exact [48]𝜎𝑟at point A (0, 5) 7.6835 (1.38%) 7.5894 (0.13%) 7.5806 (0.02%) 7.5792
𝜎𝑟at point B (1, 5) −7.7920 (1.47%) −7.7088 (0.39%) −7.6832 (0.05%) −7.6792
where 𝑈𝑖and 𝑉
𝑖(𝑖 = 1 ∼ 18) are the displacement solutions
derived from the fundamental analytical solutions of the Airystress function, and have been given inTable 1;𝛼
𝑖(𝑖 = 1 ∼ 14)
are 14 unknown parameters related to 𝑢𝛼and V𝛼; 𝛽𝑖(𝑖 = 1 ∼
4) are 4 unknown parameters related to 𝑢𝛽and V𝛽;
{
𝑢𝛼
V𝛼
} = {
U��V��} , (33)
are assumed displacements which possess third-order com-pleteness in 𝑥 and y; and
{
𝑢𝛽
V𝛽
} = {
U𝛽V𝛽
} , (34)
are assumed fourth-order displacement fields.For the fourth-order displacement fields 𝑢
𝛽and V
𝛽, two
additional relaxed point bubble conditions are introduced8
∑
𝑖=5
𝑢𝛽(𝑥𝑖, 𝑦𝑖) =
8
∑
𝑖=5
[𝑈15(𝑥𝑖, 𝑦𝑖) 𝛽1+ 𝑈16(𝑥𝑖, 𝑦𝑖) 𝛽2
+ 𝑈17(𝑥𝑖, 𝑦𝑖) 𝛽3+ 𝑈18(𝑥𝑖, 𝑦𝑖) 𝛽4] = 0,
8
∑
𝑖=5
V𝛽(𝑥𝑖, 𝑦𝑖) =
8
∑
𝑖=5
[𝑉15(𝑥𝑖, 𝑦𝑖) 𝛽1+ 𝑉16(𝑥𝑖, 𝑦𝑖) 𝛽2
+ 𝑉17(𝑥𝑖, 𝑦𝑖) 𝛽3+ 𝑉18(𝑥𝑖, 𝑦𝑖) 𝛽4] = 0.
(35)
So,𝛽2and𝛽4can be expressed in terms of𝛽
1and𝛽3as follows
{
𝛽2
𝛽4
} = −[
𝑎2𝑎4
𝑏2𝑏4
]
−1
[
𝑎1𝑎3
𝑏1𝑏3
]{
𝛽1
𝛽3
} = [
𝑟11
𝑟12
𝑟21
𝑟22
]{
𝛽1
𝛽3
} ,
(36)
in which
𝑎1= 0.5
8
∑
𝑖=5
𝑥4
𝑖− (6 + 3𝜇)
8
∑
𝑖=5
𝑥2
𝑖𝑦2
𝑖+ (1.5 + 𝜇)
8
∑
𝑖=5
𝑦4
𝑖,
𝑎2= (2.5 + 5𝜇)
8
∑
𝑖=5
𝑥4
𝑖− 15𝜇
8
∑
𝑖=5
𝑥2
𝑖𝑦2
𝑖− 2.5
8
∑
𝑖=5
𝑦4
𝑖,
𝑎3= (2 + 4𝜇)
8
∑
𝑖=5
𝑥3
𝑖𝑦𝑖− 2𝜇
8
∑
𝑖=5
𝑥𝑖𝑦3
𝑖,
𝑎4= 10
8
∑
𝑖=5
𝑥3
𝑖𝑦𝑖− (20 + 10𝜇)
8
∑
𝑖=5
𝑥𝑖𝑦3
𝑖,
𝑏1= −2𝜇
8
∑
𝑖=5
𝑥3
𝑖𝑦𝑖+ (2 + 4𝜇)
8
∑
𝑖=5
𝑥𝑖𝑦3
𝑖,
𝑏2= − (20 + 10𝜇)
8
∑
𝑖=5
𝑥3
𝑖𝑦𝑖+ 10
8
∑
𝑖=5
𝑥𝑖𝑦3
𝑖,
𝑏3= (1.5 + 𝜇)
8
∑
𝑖=5
𝑥4
𝑖− (6 + 3𝜇)
8
∑
𝑖=5
𝑥2
𝑖𝑦2
𝑖+ 0.5
8
∑
𝑖=5
𝑦4
𝑖,
𝑏4= −2.5
8
∑
𝑖=5
𝑥4
𝑖− 15𝜇
8
∑
𝑖=5
𝑥2
𝑖𝑦2
𝑖+ (2.5 + 5𝜇)
8
∑
𝑖=5
𝑦4
𝑖.
(37)
Let
𝛽1= 𝛼15
𝛽3= 𝛼16.
(38)
Then, the displacement fields in (31) can be rewritten as
u𝑒 = {
𝑢
V} = [
U UV V
]
{
{
{
��
{
𝛼15
𝛼16
}
}
}
}
= P𝛼, (39)
with
U = [(𝑈15+ 𝑟11𝑈16+ 𝑟21𝑈18) (𝑈
17+ 𝑟12𝑈16+ 𝑟22𝑈18)]
V = [(𝑉15+ 𝑟11𝑉16+ 𝑟21𝑉18) (𝑉
17+ 𝑟12𝑉16+ 𝑟22𝑉18)] ,
P = [
U UV V
] ,
𝛼 = [𝛼1
𝛼2
𝛼3
⋅ ⋅ ⋅ 𝛼14
𝛼15
𝛼16]T.
(40)
Substitution of coordinates of eight nodes into (39) yields
d𝛼 = q𝑒, (41)
in which
d =
[
[
[
[
[
P(𝑥1, 𝑦1)
P(𝑥2, 𝑦2)
...P(𝑥8, 𝑦8)
]
]
]
]
]16 × 16
, (42)

10 Mathematical Problems in Engineering
(0, 0)
(0, c)
x
y
distributed as
P = 20c2/L
P = 20c2/L
distributed as
fy =120y
L−120y2
cL
M = 20c2
fx =240y
c− 120
E = 107, 𝜇 = 0.3, t = 1.0
(100, 10)
Mesh 11
(0, 10)
(0, 0)
(50, 10)
(75, 0) (100, 0)
(100, 10)(0, 10)
Mesh 11a
(0, 0) (50, 0)
(50, 10)(25, 10) (75, 10)
(32.5, 5) (82.5, 0)
(100, 0)
Mesh 2
(75, 10)
(25, 0)
Mesh 3(33, 6) (68, 7)
(35, 4) (66, 3)
(100, 10)(0, 10)
Mesh 1
(0, 0) (50, 0)
(50, 10)
(100, 0)
(100, 10)(0, 10)
Mesh 4(50, 5)
(0, 0) (100, 0)
Mesh 5 (85, 3)
Mesh 6(66, 3)
(30, 4) (55, 7)(51, 5.5)
Mesh 9
(0, 0)
(0, 20) (10, 20)
(10, 0)
(0, 10)
Mesh 7
(0, 0)
(20, 10)
(20, 0)
Mesh 8
(10, 10)
(10, 0)
x
x(y) = 10 − 8(y/10)(1 − y/10) Mesh 10
(0, 10) (10, 10)
y
y(x) = 10 − 8(x/10)(1 − x/10)
(L, c)
(L, 0)
Figure 5: Linear bending problem for a cantilever beam.
where q𝑒 is the element nodal displacement vector and hasbeen given by (19). Then, 𝛼
𝑖(𝑖 = 1 ∼ 16) can be solved by
𝛼 = d−1
q𝑒. (43)
It should be noted that so long as the element nodes are not incoincidence with each other, the matrix d is hardly singularfor various element shapes.
The displacement fields in terms of Cartesian coordinatesof the element US-QUAD8 can be replaced by (39).Thus, theelement stiffness matrix in (27) can be rewritten as
K𝑒 = ∬
𝐴𝑒
BTSd−1
𝑡 d𝐴 = ∬
1
−1
B∗T
|J|Sd−1
|J| 𝑡 d𝜉 d𝜂
= ∬
1
−1
B∗TS𝑡 d𝜉 d𝜂 ⋅ d−1
,
(44)
where B and B∗ are given by (28), and
S = [
[
0 0 0 𝜎𝑥4
𝜎𝑥5
⋅ ⋅ ⋅ 𝜎𝑥14
𝜎𝑥15
+ 𝑟11𝜎𝑥16
+ 𝑟21𝜎𝑥18
𝜎𝑥17
+ 𝑟12𝜎𝑥16
+ 𝑟22𝜎𝑥18
0 0 0 𝜎𝑦4
𝜎𝑦5
⋅ ⋅ ⋅ 𝜎𝑦14
𝜎𝑦15
+ 𝑟11𝜎𝑦16
+ 𝑟21𝜎𝑦18
𝜎𝑦17
+ 𝑟12𝜎𝑦16
+ 𝑟22𝜎𝑦18
0 0 0 𝜏𝑥𝑦4
𝜏𝑥𝑦5
⋅ ⋅ ⋅ 𝜏𝑥𝑦14
𝜏𝑥𝑦15
+ 𝑟11𝜏𝑥𝑦16
+ 𝑟21𝜏𝑥𝑦18
𝜏𝑥𝑦17
+ 𝑟12𝜏𝑥𝑦16
+ 𝑟22𝜏𝑥𝑦18
]
]3 × 16
, (45)

Mathematical Problems in Engineering 11
Table 4: Results at selected locations for the linear bending problem (Figure 5).
Q8 (3 × 3) HSF-Q8-15𝛽 (5 × 5) US-QUAD8 (3 × 3) US-ATFQ8(5 × 5 or 3 × 3) Exact
𝜎𝑥(0, 10) −66.871 −120.00 −66.871 −120.000 −120.0
Mesh 1 𝜎𝑥(0, 0) 66.871 120.00 66.871 120.000 120.0
v(100, 0) × 103 6.282 8.558 6.282 8.0460 8.046𝜎𝑥(0, 10) −35.248 −113.63 −74.317 −120.000 −120.0
Mesh 2 𝜎𝑥(0, 0) 67.040 119.63 71.781 120.000 120.0
v(100, 0) × 103 1.611 7.104 6.415 8.0460 8.046𝜎𝑥(0+,10) −11.307 −68.645 −66.349 −120.000 −120.0
𝜎𝑥(0, 10
−) −55.699 −66.980 −67.974 −120.000 −120.0
Mesh 3 𝜎𝑥(0, 0+) 55.305 66.146 67.995 120.000 120.0
𝜎𝑥(0+, 0) 11.073 69.328 66.328 120.000 120.0
v(100, 0) × 103 4.520 6.350 6.292 8.0460 8.046𝜎𝑥(0, 10) −72.471 −120.00 −120.0
Mesh 4 𝜎𝑥(0, 0) Failed 76.265 Failed 120.00 120.0
v(100, 0) × 103 6.663 8.0460 8.046𝜎𝑥(0, 10) −77.515 −58.158 −120.000 −120.0
Mesh 5 𝜎𝑥(0, 0) Failed 66.306 59.158 120.000 120.0
v(100, 0) × 103 6.729 5.471 8.0460 8.046𝜎𝑥(0+, 10) −70.346 −42.671 −120.000 −120.0
𝜎𝑥(0, 10
−) −66.835 −44.636 −120.000 −120.0
Mesh 6 𝜎𝑥(0, 0+) Failed 66.877 40.974 120.000 120.0
𝜎𝑥(0+, 0) 68.512 41.048 120.000 120.0
v(100, 0) × 103 6.373 3.752 8.0460 8.046𝜎𝑥(0, 10) −105.69 −120.00 −105.69 −120.000 −120.0
Mesh 7 𝜎𝑥(0, 0) 105.69 120.00 105.69 120.000 120.0
v(20, 0) × 104 3.485 3.975 3.485 3.6600 3.66𝜎𝑥(0, 10) −115.25 −119.02 −118.99 −120.000 −120.0
Mesh 8 𝜎𝑥(0, 0) 115.25 119.02 118.99 120.000 120.0
v(20, 0) × 104 3.3423 3.796 3.5570 3.6600 3.66𝜎𝑥(0, 20) −118.68 −120.00 −118.68 −120.000 −120.0
Mesh 9 𝜎𝑥(0, 0) 118.68 120.00 118.68 120.000 120.0
v(10, 0) × 105 11.1963 15.750 11.1963 13.200 13.2𝜎𝑥(0, 20) −97.066 −121.61 −118.94 −120.00b/−119.65a −120.0
Mesh 10 𝜎𝑥(0, 0) 138.21 124.61 117.74 120.00b/119.36a 120.0
v(10, 0) × 105 12.8162 13.738 12.9157 13.200b/13.190a 13.2𝜎𝑥(0, 10) −24.732 −36.104 −120.000 −120.0
Mesh 11 𝜎𝑥(0, 0) Failed 20.048 36.230 120.000 120.0
v(100, 0) × 103 1.517 3.1470 8.0460 8.046a3 × 3 integration scheme; b5 × 5 integration scheme.
where𝜎𝑥𝑖,𝜎𝑦𝑖and 𝜏𝑥𝑦𝑖
(𝑖 = 4 ∼ 18) have been given in Table 1.And the element stresses can be evaluated by
𝜎 =
{
{
{
𝜎𝑥
𝜎𝑦
𝜏𝑥𝑦
}
}
}
= Sd−1
q𝑒. (46)
The resulting element model is denoted as US-ATFQ8.It can avoid the interpolation failure and rotational frame
dependence problems existing in the original unsymmetricelement US-QUAD8, and possesses much better accuracy forhigher-order problems.
Example 3 (linear bending for a cantilever beam (Figure 5)).As shown in Figure 5, a cantilever beam under plane stresscondition is subjected to a linear bending moment causedby a shear force 𝑃 at the free end. This problem is often

12 Mathematical Problems in Engineering
used to assess the distortion sensitivity of the cubic planeelements [4]. The theoretical solutions for this problem aregiven by [47]. The meshes used for this example are alsogiven in Figure 5. Table 4 lists results using full or suggestedintegration schemes. It is astonishing that the present elementUS-ATFQ8 can almost produce the exact solutions under allmeshes.This phenomenon has not been found before for anyother 8-node plane elements.
The element US-ATFQ8 can nearly produce the exactsolutions for constant, pure bending and linear bendingproblems, nomatter the element edges are straight or curved,and no matter the shapes of the elements are convex orconcave. This important advantage cannot be achieved byother 8-node, 16-DOF elements. Compared with the orig-inal unsymmetric 8-node plane element US-QUAD8, thepresent element possesses obvious advantages: (i) elementUS-ATFQ8 can still work well when interpolation failuremodes for US-QUAD8 occur; (ii) element US-ATFQ8 nat-urally eliminates the rotation dependency which exists inelement US-QUAD8 for higher-order problems; and (iii)element US-ATFQ8 can provide more accurate results thanthose obtained by element US-QUAD8 in most complicatedproblems.Therefore, element US-ATFQ8 is a truly shape-freefinite element model.
5. Discussions and Concluding Remarks
Since there is no inverse of the Jacobianmatrix existing in theexpressions of the element stiffness matrix, most sensitivityproblems to mesh distortion can be automatically avoided.And the use of the fundamental analytical solutions ofelasticity significantly improved the element accuracy. Havewe already found effective ways for developing new finiteelements whose performances are independent to elementshapes? If it was true, the users of FEM would not worryabout the mesh quality in practical analyses, and it was notnecessary for researchers to make more efforts on meshgeneration techniques.
However, the answer is not optimistic. We have toencountermany additional difficulties when generalize abovemethods for developing other models.
When one develops 3D 20-node hexahedral element,in order to construct a complete fourth-order displacementfields (similar with (31) for 2D case), 75 fundamental ana-lytical solutions must be considered, which is too com-plicated and not economical for practical applications. Onthe other hand, when one wants to develop lower-orderelement models (such as plane 4-node quadrilateral elementwith 8 DOFs, or 3D 8-node hexahedral element with 24DOFs) directly using the above method, the number of theeffective fundamental analytical solutions will be limitedby the number of the element DOFs, so that there is nonoteworthy improvements on accuracy.
In HSF element method, in order to guarantee its robustperformance, the assumed exact displacements of the ele-ment boundaries may be required. However, it is difficult toobtain such displacements in 3D problems.
Furthermore, how to select the appropriate forms ofthe fundamental analytical solutions [49], how to construct
shape-free plate and shell elements, how to improve thecomputational efficiency of the elements with unsymmetricstiffness matrices, how to deal with the problems in whichthere are no fundamental analytical solutions (such as non-linear problems), and so forth, are all important issues thatwe have to face to.
Obviously, new techniques must be developed for solvingabove problems. But at the same time, do not forget that someexisting achievements, such as the new natural coordinatemethods [30–38], generalized conforming method [2, 23],assumed strainmethod [17], could play important roles in theconstructions of the new shape-free finite elements, especiallyfor low-order high-performance models.
So, for establish systematic shape-free finite elementmethod, there is still a long way to go.
Acknowledgments
The authors would like to acknowledge the financial sup-port of the National Natural Science Foundation of China(11272181), the Specialized Research Fund for the DoctoralProgram of Higher Education of China (20120002110080),and the National Basic Research Program of China (Projectno. 2010CB832701).
References
[1] O. C. Zienkiewicz and R. L. Taylor, The Finite Element Methodfor Solid and Structural Mechanics, Elsevier, Oxford, UK, 6thedition, 2005.
[2] Y.-Q. Long, S. Cen, and Z.-F. Long, Advanced Finite ElementMethod in Structural Engineering, Tsinghua University Press,Beijing, China; Springer, Berlin, Germany, 2009.
[3] J. A. Stricklin, W. S. Ho, E. Q. Richardson, and W. E. Haister,“On isoparametric vs linear strain triangular elements,” Inter-national Journal for Numerical Methods in Engineering, vol. 11,pp. 1041–1043, 1977.
[4] N.-S. Lee and K.-J. Bathe, “Effects of element distortions on theperformance of isoparametric elements,” International Journalfor Numerical Methods in Engineering, vol. 36, no. 20, pp. 3553–3576, 1993.
[5] T. Belytschko, Y. Y. Lu, and L. Gu, “Element-free Galerkinmethods,” International Journal for Numerical Methods in Engi-neering, vol. 37, no. 2, pp. 229–256, 1994.
[6] W. K. Liu, S. Jun, and Y. F. Zhang, “Reproducing kernelparticle methods,” International Journal for Numerical Methodsin Fluids, vol. 20, no. 8-9, pp. 1081–1106, 1995.
[7] S. N. Atluri, H.-G. Kim, and J. Y. Cho, “A critical assessment ofthe truly Meshless Local Petrov-Galerkin (MLPG), and LocalBoundary Integral Equation (LBIE) methods,” ComputationalMechanics, vol. 24, no. 5, pp. 348–372, 1999.
[8] Y. X. Mukherjee and S. Mukherjee, “The boundary nodemethod for potential problems,” International Journal forNumerical Methods in Engineering, vol. 40, no. 5, pp. 797–815,1997.
[9] J.-M. Zhang, Z.-H. Yao, and H. Li, “A hybrid boundary nodemethod,” International Journal for Numerical Methods in Engi-neering, vol. 53, no. 4, pp. 751–763, 2002.
[10] X. Zhang, X.-H. Liu, K.-Z. Song, and M.-W. Lu, “Least-squares collocation meshless method,” International Journal for

Mathematical Problems in Engineering 13
Numerical Methods in Engineering, vol. 51, no. 9, pp. 1089–1100,2001.
[11] Y. C. Cai and H. H. Zhu, “A PU-based meshless Shepardinterpolation method satisfying delta property,” EngineeringAnalysis with Boundary Elements, vol. 34, no. 1, pp. 9–16, 2010.
[12] T. H. H. Pian, “Derivation of element stiffness matrices byassumed stress distributions,” AIAA Journal, vol. 2, no. 7, pp.1333–1336, 1964.
[13] T. H. H. Pian and D. P. Chen, “Alternative ways for formulationof hybrid stress elements,” International Journal for NumericalMethods in Engineering, vol. V 18, no. 11, pp. 1679–1684, 1982.
[14] T. H. H. Pian and K. Sumihara, “Rational approach for assumedstress finite elements,” International Journal for NumericalMethods in Engineering, vol. 20, no. 9, pp. 1685–1695, 1984.
[15] E. L. Wilson, R. L. Taylor, W. P. Doherty, and T. Ghabussi,“Incompatible displacement models,” in Numerical Computa-tional Methods in Structural Mechanics, S. T. Fenven, Ed., pp.43–57, Academic Press, New York, NY, USA, 1973.
[16] R. L. Taylor, P. J. Beresford, and E. L. Wilson, “A non-confo-rming element for stress analysis,” International Journal forNumerical Methods in Engineering, vol. 10, pp. 1211–1219, 1976.
[17] J. C. Simo and M. S. Rifai, “A class of mixed assumed strainmethods and themethod of incompatible modes,” InternationalJournal for Numerical Methods in Engineering, vol. 29, no. 8, pp.1595–1638, 1990.
[18] T. Belytschko and W. E. Bachrach, “Efficient implementationof quadrilaterals with high coarse-mesh accuracy,” ComputerMethods in Applied Mechanics and Engineering, vol. 54, no. 3,pp. 279–301, 1986.
[19] T. J. R. Hughes, “Generalization of selective integration proce-dures to anisotropic andnonlinearmedia,” International Journalfor Numerical Methods in Engineering, vol. 15, no. 9, pp. 1413–1418, 1980.
[20] R. H. MacNeal, “Derivation of element stiffness matrices byassumed strain distributions,” Nuclear Engineering and Design,vol. 70, no. 1, pp. 3–12, 1982.
[21] R. Piltner and R. L. Taylor, “A systematic construction of B-bar functions for linear and non-linear mixed-enhanced finiteelements for plane elasticity problems,” International Journal forNumerical Methods in Engineering, vol. 44, no. 5, pp. 615–639,1999.
[22] L.-M. Tang, W.-J. Chen, and Y.-X. Liu, “Formulation of Quasi-Conforming element and Hu-Washizu principle,” Computers &Structures, vol. 19, no. 1-2, pp. 247–250, 1984.
[23] Y.-Q. Long and M.-F. Huang, “A generalized conformingisoparametric element,” Applied Mathematics and Mechanics,vol. 9, no. 10, pp. 929–936, 1988.
[24] G. R. Liu, T. Nguyen-Thoi, and K. Y. Lam, “A novel FEMby scaling the gradient of strains with factor 𝛼 (𝛼FEM),”Computational Mechanics, vol. 43, no. 3, pp. 369–391, 2009.
[25] G. R. Liu, K. Y. Dai, and T. T. Nguyen, “A smoothed finiteelement method for mechanics problems,” ComputationalMechanics, vol. 39, no. 6, pp. 859–877, 2007.
[26] G. R. Liu, H. Nguyen-Xuan, and T. Nguyen-Thoi, “A theoreticalstudy on the smoothed FEM (S-FEM)models: properties, accu-racy and convergence rates,” International Journal for NumericalMethods in Engineering, vol. 84, no. 10, pp. 1222–1256, 2010.
[27] J. Chen, C.-J. Li, and W.-J. Chen, “A family of spline finiteelements,” Computers & Structures, vol. 88, no. 11-12, pp. 718–727, 2010.
[28] S. Rajendran and B. R. Zhang, “A “FE-meshfree” QUAD4element based on partition of unity,” Computer Methods inApplied Mechanics and Engineering, vol. 197, no. 1–4, pp. 128–147, 2007.
[29] J. P. Xu and S. Rajendran, “A partition-of-unity based “FE-Meshfree” QUAD4 element with radial-polynomial basis func-tions for static analyses,”ComputerMethods in AppliedMechan-ics and Engineering, vol. 200, no. 47-48, pp. 3309–3323, 2011.
[30] Y.-Q. Long, J.-X. Li, Z.-F. Long, and S. Cen, “Area co-ordinatesused in quadrilateral elements,” Communications in NumericalMethods in Engineering, vol. 15, no. 8, pp. 533–545, 1999.
[31] Z.-F. Long, J.-X. Li, S. Cen, and Y.-Q. Long, “Some basicformulae for area co-ordinates in quadrilateral elements,” Com-munications inNumericalMethods in Engineering, vol. 15, no. 12,pp. 841–852, 1999.
[32] X.-M. Chen, S. Cen, X.-R. Fu, and Y.-Q. Long, “A new quadri-lateral area coodinate method (QACM-II) for developingquadrilateral finite element models,” International Journal forNumerical Methods in Engineering, vol. 73, no. 13, pp. 1911–1941,2008.
[33] Z.-F. Long, S. Cen, L. Wang, X.-R. Fu, and Y.-Q. Long, “Thethird form of the quadrilateral area coordinate method(QACM-III): theory, application, and scheme of compositecoordinate interpolation,” Finite Elements in Analysis andDesign, vol. 46, no. 10, pp. 805–818, 2010.
[34] H.-G. Li, S. Cen, andZ.-Z. Cen, “Hexahedral volume coordinatemethod (HVCM) and improvements on 3DWilson hexahedralelement,” Computer Methods in Applied Mechanics and Engi-neering, vol. 197, no. 51-52, pp. 4531–4548, 2008.
[35] X.-M. Chen, S. Cen, Y.-Q. Long, and Z.-H. Yao, “Membraneelements insensitive to distortion using the quadrilateral areacoordinate method,” Computers & Structures, vol. 82, no. 1, pp.35–54, 2004.
[36] S. Cen, X.-M. Chen, and X.-R. Fu, “Quadrilateral membraneelement family formulated by the quadrilateral area coordinatemethod,” Computer Methods in Applied Mechanics and Engi-neering, vol. 196, no. 41–44, pp. 4337–4353, 2007.
[37] A.-K. Soh, Y.-Q. Long, and S. Cen, “Development of eight-nodequadrilateral membrane elements using the area coordinatesmethod,” Computational Mechanics, vol. 25, no. 4, pp. 376–384,2000.
[38] S. Cen, T. Zhang, C.-F. Li, X.-R. Fu, and Y.-Q. Long, “A hybrid-stress element based on Hamilton principle,” Acta MechanicaSinica, vol. 26, no. 4, pp. 625–634, 2010.
[39] X.-R. Fu, S. Cen, C. F. Li, and X.-M. Chen, “Analytical trialfunctionmethod for development of new 8-node plane elementbased on the variational principle containing airy stress func-tion,” Engineering Computations, vol. 27, no. 4, pp. 442–463,2010.
[40] S. Cen, X.-R. Fu, and M.-J. Zhou, “8- and 12-node plane hybridstress-function elements immune to severely distorted meshcontaining elements with concave shapes,” Computer Methodsin Applied Mechanics and Engineering, vol. 200, no. 29–32, pp.2321–2336, 2011.
[41] S. Cen, X.-R. Fu, G.-H. Zhou, M.-J. Zhou, and C. F. Li, “Shape-free finite element method: the plane hybrid stress-function(HS-F) element method for anisotropic materials,” ScienceChina Physics, Mechanics & Astronomy, vol. 54, no. 4, pp. 653–665, 2011.
[42] S. Cen, M.-J. Zhou, and X.-R. Fu, “A 4-node hybrid stress-function (HS-F) plane element with drilling degrees of freedom

14 Mathematical Problems in Engineering
less sensitive to severe mesh distortions,” Computers & Struc-tures, vol. 89, no. 5-6, pp. 517–528, 2011.
[43] S. Cen, G.-H. Zhou, and X.-R. Fu, “A shape-free 8-node planeelement unsymmetric analytical trial function method,” Inter-national Journal for Numerical Methods in Engineering, vol. 91,no. 2, pp. 158–185, 2012.
[44] S. Rajendran and K. M. Liew, “A novel unsymmetric 8-nodeplane element immune to mesh distortion under a quadraticdisplacement field,” International Journal for Numerical Meth-ods in Engineering, vol. 58, no. 11, pp. 1713–1748, 2003.
[45] S. Rajendran, “A technique to developmesh-distortion immunefinite elements,” Computer Methods in Applied Mechanics andEngineering, vol. 199, no. 17-20, pp. 1044–1063, 2010.
[46] E. T. Ooi, S. Rajendran, and J. H. Yeo, “Remedies to rotationalframe dependence and interpolation failure of US-QUAD8 ele-ment,” Communications in Numerical Methods in Engineering,vol. 24, no. 11, pp. 1203–1217, 2008.
[47] S. P. Timoshenko and J. N. Goodier, Theory of Elasticity,McGraw-Hill, New York, NY, USA, 3rd edition, 1934.
[48] D. J. Allman, “A compatible triangular element including vertexrotations for plane elasticity analysis,” Computers & Structures,vol. 19, no. 1-2, pp. 1–8, 1984.
[49] X.-R. Fu, M.-W. Yuan, S. Cen, and G. Tian, “Characteristicequation solution strategy for deriving fundamental analyticalsolutions of 3D isotropic elasticity,” Applied Mathematics andMechanics, vol. 33, no. 10, pp. 1253–1264, 2012.

Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of