Research Article Optical Flow Sensor/INS/Magnetometer...
11
Research Article Optical Flow Sensor/INS/Magnetometer Integrated Navigation System for MAV in GPS-Denied Environment Chong Shen, 1 Zesen Bai, 2 Huiliang Cao, 1 Ke Xu, 1 Chenguang Wang, 1 Huaiyu Zhang, 1 Ding Wang, 1 Jun Tang, 1 and Jun Liu 1 1 National Key Laboratory for Electronic Measurement Technology, Key Laboratory of Instrumentation Science & Dynamic Measurement, Ministry of Education, School of Instrument and Electronics, North University of China, Taiyuan 030051, China 2 School of Electronics Engineering and Computer Science, Peking University, Beijing 100871, China Correspondence should be addressed to Jun Liu; [email protected] Received 19 November 2015; Accepted 12 January 2016 Academic Editor: Fadi Dornaika Copyright © 2016 Chong Shen et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. e driſt of inertial navigation system (INS) will lead to large navigation error when a low-cost INS is used in microaerial vehicles (MAV). To overcome the above problem, an INS/optical flow/magnetometer integrated navigation scheme is proposed for GPS-denied environment in this paper. e scheme, which is based on extended Kalman filter, combines INS and optical flow information to estimate the velocity and position of MAV. e gyro, accelerator, and magnetometer information are fused together to estimate the MAV attitude when the MAV is at static state or uniformly moving state; and the gyro only is used to estimate the MAV attitude when the MAV is accelerating or decelerating. e MAV flight data is used to verify the proposed integrated navigation scheme, and the verification results show that the proposed scheme can effectively reduce the errors of navigation parameters and improve navigation precision. 1. Introduction Recently, the autonomous operating unmanned aerial vehicle (MAV) is becoming popular in military and civilian applica- tions [1–3], such as aerial surveillance, cargo delivery, search and rescue, and remote sensing and mapping. A reliable navigation system is very important for safely operating the MAV. Currently, global positioning system (GPS) [4] and inertial navigation system (INS) [5] are the most widely used navigation techniques for the MAV. GPS is based on satellite which can provide relatively consistent accuracy navigation; however, the satellite signals would be lost in city canyon or indoor environments [6, 7]. INS is a self-contained device which can offer a complete set of navigation parameters with high frequency, including attitude, velocity, and position; however, the rapid growth of systematic errors with time is a main drawback of stand-alone INS [8, 9]. Due to the drawbacks of GPS and INS, lots of novel navigation devices have been studied. For example, optical flow sensor has been proved which can provide reliable velocity and position information when applied for robot localization or navigation [10, 11]. Optical flow techniques are motivated by bird and insect flights which are used to solve the navigation problem. Optical flow can be thought to be the 2D projection of the 3D perceived motion of the objects, which has been widely utilized for motion estimation [12, 13]. When facing the ground, the optical flow sensors can be used for accurate velocity calculation, and the position can be obtained by integration. For example, computer mouse sensor is a successful application of optical flow theory. Benefiting from previous study of optical flow algorithm and hardware design, robotics researchers have employed optical flow sensors for the MAV navigation. Ding et al. [14] added optical flow into the GPS/INS integration for UAV navigation where optical flow rate is used as backup velocity aiding in case of GPS signal outages, and the verification results showed that, by using optical flow, the height estimation was still within a meter range within 20 seconds aſter GPS dropped out. Mercado et al. [15] proposed a GPS/INS/optical flow data Hindawi Publishing Corporation Journal of Sensors Volume 2016, Article ID 6105803, 10 pages http://dx.doi.org/10.1155/2016/6105803
Transcript of Research Article Optical Flow Sensor/INS/Magnetometer...

Research ArticleOptical Flow SensorINSMagnetometer IntegratedNavigation System for MAV in GPS-Denied Environment
Chong Shen1 Zesen Bai2 Huiliang Cao1 Ke Xu1 Chenguang Wang1 Huaiyu Zhang1
Ding Wang1 Jun Tang1 and Jun Liu1
1National Key Laboratory for Electronic Measurement TechnologyKey Laboratory of Instrumentation Science amp Dynamic Measurement Ministry of Education School of Instrument and ElectronicsNorth University of China Taiyuan 030051 China2School of Electronics Engineering and Computer Science Peking University Beijing 100871 China
Correspondence should be addressed to Jun Liu liujnuceducn
Received 19 November 2015 Accepted 12 January 2016
Academic Editor Fadi Dornaika
Copyright copy 2016 Chong Shen et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The drift of inertial navigation system (INS) will lead to large navigation error when a low-cost INS is used in microaerialvehicles (MAV) To overcome the above problem an INSoptical flowmagnetometer integrated navigation scheme is proposedfor GPS-denied environment in this paper The scheme which is based on extended Kalman filter combines INS and optical flowinformation to estimate the velocity and position of MAVThe gyro accelerator and magnetometer information are fused togetherto estimate the MAV attitude when the MAV is at static state or uniformly moving state and the gyro only is used to estimatethe MAV attitude when the MAV is accelerating or decelerating The MAV flight data is used to verify the proposed integratednavigation scheme and the verification results show that the proposed scheme can effectively reduce the errors of navigationparameters and improve navigation precision
1 Introduction
Recently the autonomous operating unmanned aerial vehicle(MAV) is becoming popular in military and civilian applica-tions [1ndash3] such as aerial surveillance cargo delivery searchand rescue and remote sensing and mapping A reliablenavigation system is very important for safely operating theMAV Currently global positioning system (GPS) [4] andinertial navigation system (INS) [5] are the most widely usednavigation techniques for the MAV GPS is based on satellitewhich can provide relatively consistent accuracy navigationhowever the satellite signals would be lost in city canyon orindoor environments [6 7] INS is a self-contained devicewhich can offer a complete set of navigation parameters withhigh frequency including attitude velocity and positionhowever the rapid growth of systematic errors with time isa main drawback of stand-alone INS [8 9]
Due to the drawbacks of GPS and INS lots of novelnavigation devices have been studied For example opticalflow sensor has been proved which can provide reliable
velocity and position information when applied for robotlocalization or navigation [10 11] Optical flow techniquesare motivated by bird and insect flights which are used tosolve the navigation problem Optical flow can be thoughtto be the 2D projection of the 3D perceived motion of theobjects which has been widely utilized formotion estimation[12 13] When facing the ground the optical flow sensors canbe used for accurate velocity calculation and the position canbe obtained by integration For example computer mousesensor is a successful application of optical flow theoryBenefiting from previous study of optical flow algorithm andhardware design robotics researchers have employed opticalflow sensors for the MAV navigation Ding et al [14] addedoptical flow into the GPSINS integration for UAVnavigationwhere optical flow rate is used as backup velocity aiding incase ofGPS signal outages and the verification results showedthat by using optical flow the height estimation was stillwithin a meter range within 20 seconds after GPS droppedoutMercado et al [15] proposed a GPSINSoptical flow data
Hindawi Publishing CorporationJournal of SensorsVolume 2016 Article ID 6105803 10 pageshttpdxdoiorg10115520166105803
2 Journal of Sensors
Search area
Target block
Preceding frame Current frame
i
j
Optical flow vector
Target block in current frame
xp(i j)
d
xc(i + Δi j + Δj)
Δi
V Δj
Figure 1 Block matching algorithm based on sum of absolute differences
fusion method for position and velocity estimation experi-ment results showed that a good velocity measurement couldbe obtained by optical flow under rough GPS conditionsRhudy et al [16] aided wide-field optical flow to INS for UAVwhere the wide-field optical flow was used to regulate INSdrift for the purpose of GPS-denied navigation Gageik et al[17] applied an optical flow sensor for 2D positioning of UAVand position hold result showed that the standard deviationof the position error was just 10 cm and the position error wasjust about 30 cm after landing It can be clearly seen that theoptical flow is an effective solution for velocity and positionmeasurement However traditional optical flow is detectedby video camera which is not suitable for MAV because ofthe weight size and power In 2013 an optical flow sensorbased on a machine vision CMOS image sensor for MAVwas proposed and named as PX4FLOW [18] and the indoorverification results showed that the error was just 05m withthe overall trajectory being 2844m Compared to traditionaloptical flow sensors PX4FLOW is of low power low latencysmall size and low cost therefore it is very suitable for MAVapplications
In this paper an optical flow sensorINSmagnetometerintegrated navigation system is proposed for MAV whereoptical flow sensor is used to measure the velocity andposition of the MAV and the magnetometer is used tomeasure the attitude of the MAV then these navigationparameters are applied to calibrate the drift of INS by usingan extend Kalman filter This paper is organized as followsSection 2 is the theory of velocity and position estimationby optical flow The data fusion model is given in Section 3Section 4 is the experiment and verification Section 5 is theconclusion
2 Estimation of Velocity and Position byOptical Flow Sensor
21 The Calculation of Optical Flow Optical flow is the pro-jection of 3D relative motion onto a 2D image plane In order
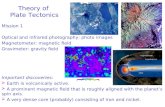
to calculate the optical flow the researchers have proposedmany solutions such as Lucas-Kanade algorithm Horn-Schunck algorithm image interpolation algorithm blockmatching algorithm and feature matching algorithm In ourstudy considering the complexity of the software calculationand hardware platform the blockmatching algorithm (BMA)based on minimum mean absolute error (MMAE) and thesum of absolute differences (SAD) are selected to calculatethe optical flow which is shown in Figure 1
As shown in Figure 1 119909119901(119894 119895) is set as the gray value of119899 times 119899 target block selected from the previous frame and119909119888(119894 + Δ119894 119895 + Δ119895) is the gray value of the target block which isto be matched in the searching area of current frame where1 le 119894 119895 le 119899 minus119889 le Δ119894 Δ119895 le 119889 The principle of BMA based onMMAE and the SAD is to search Δ119894 and Δ119895 which satisfy (1)then the optical flow vector V = 119903(Δ119894 Δ119895)
119879 can be obtainedwhere the unit of V is pixelsec 119903 is the sample frequencyof the camera and the unit is framesec 119880 is the minimummean absolute error
SAD (Δ119894 Δ119895) =119899
sum
119895=1
119899
sum
119895=1
10038161003816100381610038161003816119909119888 (119894 + Δ119894 119895 + Δ119895) minus 119909119901 (119894 119895)
10038161003816100381610038161003816 (1)
119880 = min(Δ119894Δ119895)
SAD (Δ119894 Δ119895) (2)
V = 119903 (Δ119894 Δ119895)119879100381610038161003816100381610038161003816119880 (3)
In the initial state a target is selected at the original pointof the imaging plane the target block will move when theMAV moves In the searching area of the current frame theoptical flow vector of the target block can be obtained bycalculating theminimumSADbetween the current block andthe previous block
In the experiment the images which are perpendicularto the camera are collected In the whole collecting process adata block which is 8 times 8 pixel is used as the block matchingobject and the searching area contains plusmn4 pixels So there
Journal of Sensors 3
Pc (Xc Yc Zc)
p (x y f)
f
XcYc
O
Zc
Figure 2 The model of pin-hole image plane
are 64 pixel points and 81 candidate vector directions in eachframe image After obtaining each frame image the meanabsolute errors of each candidate vector are calculated andthe minimum value is selected as the optical flow vector
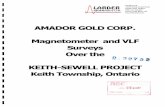
22 The Model of Optical Flow The motion model of opticalflow is projecting the three-dimensional motion onto thetwo-dimensional image plane of the camera There are twocommon optical flow estimation models one is pin-holeimage plane approach which is derived from the principleof insect and vertebrate visual system the other is sphericalimaging surface approach which is derived from insectcompound eyes In our study the pin-hole image planeapproach is used to estimate the motion of MAV undergeographic coordinate system
The pin-hole image plane model is shown as in Figure 2Pc = [119883119888 119884119888 119885119888]
119879 is set as a point under camera coordinatesystem 119891 stands for the focal length so Pc can be expressedas p = [119909 119910 119891]119879
p = 119891Pc119885119888
(4)
119909 = 119891
119883119888
119885119888
(5)
119910 = 119891
119884119888
119885119888
(6)
Considering any point P on the ground point P has thefollowing relationship relative to the MAV under the cameracoordinate system
Vc = minusTc minus 120596 times Pc (7)
Equation (7) is expanded in three dimensions and (8) canbe obtained
119881119909119888
= minus119879119909119888
minus (120596119910119885119888 minus 120596119911119884119888)
119881119910119888
= minus119879119910119888
minus (120596119911119883119888 minus 120596119909119885119888)
119881119911119888
= minus119879119911119888
minus (120596119909119884119888 minus 120596119910119883119888)
(8)
where 120596 = [120596119909 120596119910 120596119911]119879 is angular velocity of MAV Tc =
[119879119909119888
119879119910119888
119879119911119888
]119879 is average velocity of MAV under camera
coordinate systemAfter derivation calculus to (4) the relationship between
the velocity ofPc under the camera coordinate system and thevelocity of p under the image plane can be obtained
flowΔtime
= k = 119891119885Vc minus 119881119911Pc
1198852119888
(9)
where k = [V119909 V119910 V119911]119879 and (10)ndash(12) can obtained by
expanding (9)
V119909 =119891
1198852119888
(119881119909119888
119885119888 minus 119881119911119885119909) (10)
V119910 =119891
1198852119888
(119881119910119888
119885119888 minus 119881119911119885119910) (11)
V119911 = 0 (12)
Substituting (8) into (10) and (11) (13) can be obtained
V119909 =119879119911119888
119909 minus 119879119909119888
119891
119885119888
minus 120596119910119891 + 120596119911119910 +
120596119909119909119910 minus 1205961199101199092
119891
V119910 =119879119911119888
119910 minus 119879119910119888
119891
119885119888
+ 120596119909119891 minus 120596119909119910 +
1205961199091199102minus 120596119910119909119910
119891
(13)
In (13) V119909 and V119910 are the optical flow components ondirections119909 and119910 which can be calculated by SADandBMA119885119888 can be obtained by ultrasonic which was integrated in theoptical flow sensor Angular velocity 120596119909 120596119910 and 120596119911 can beobtained by gyroscope 119909 and 119910 can be substituted by (2)and (3) Therefore the translational velocity Tc of the MAVunder the camera coordinate system can be estimated andtheMAV velocity under geographic coordinate system can becalculated through coordinate transformational matrix Cn
c After integration of velocity the data for position ofMAV canbe obtained at last
23 Attitude Estimation Based on AccelerometerMagnetome-ter By measuring the gravitational field the accelerometercan determine the roll and pitch of the MAV under thecondition of no own acceleration by measuring the geomag-netic field the magnetometer can determine the heading ofMAV based on the vehiclersquos attitude information provided byaccelerometer Then the whole attitude information withoutaccumulated error can be obtained by integrating accelerom-etermagnetometer
231 The Roll and Pitch Obtained by Accelerometer Thecomponent of gravity vector under the geographic coordi-nate system is [0 0 minus119892]
119879 When the vehicle is static (norelative acceleration to the navigation coordinate system)the measured value of accelerometer which is fixed in thecarrier coordinate system is a119887 = [119886119909
119887
119886119910119887
119886119911119887
]
119879 Theheading of the vehicle has no influence on the output of
4 Journal of Sensors
accelerometers of directions 119909 and 119910 due to the gravitationalacceleration perpendicular to horizontal plane Therefore itcan be concluded that
[
[
[
[
119886119909119887
119886119910119887
119886119911119887
]
]
]
]
=[
[
[
cos 120574 sin 120574 sin 120579 minus sin 120574 cos 1205790 cos 120579 sin 120579
sin 120574 minus cos 120574 sin 120579 cos 120574 cos 120579
]
]
]
[
[
[
0
0
minus119892
]
]
]
(14)
The roll and pitch can be calculated
120579 = arcsin(minus119886119910119887
119892
)
120574 = arctan(minus119886119909119887
119886119911119887
)
(15)
Thismethod uses the projection information of the earthrsquosgravitational acceleration in carrier coordinate system toreflect the attitude information of the vehicle so the above
equations are correct only under the condition that there isno acceleration of the vehicle Actually the vehicles are notalways of static or uniform motion and the measured valuesof accelerometer are not equal to the component of gravita-tional acceleration under MAV coordinate system anymoreonce the carrier is under accelerated motion Therefore thismethod only can be used for measurement in static state andit is necessary to find another attitude measuring method fordynamic conditions
232 The Heading Obtained by Magnetometer The com-ponent of earthrsquos magnetic field intensity under geographiccoordinate system is Hn = [119867119909
119899
119867119910119899
119867119911119899
]
119879 The magne-tometers are fixed on the carrier and the coordinate of themagnetometers is the same as the carrier coordinate system119865119887 and the component of magnetic field intensity under thecarrier coordinate system is Hb = [119867119909
119887
119867119910119887
119867119911119887
]
119879 Theprojection of magnetic field intensity to the geographic andcamera coordinate systems can be presented as
[
[
[
[
119867119909119899
119867119910119899
119867119911119899
]
]
]
]
=[
[
[
cos 120574 cos120593 minus sin 120574 sin 120579 sin120593 minus cos 120579 sin120593 sin 120574 cos120593 + cos 120574 sin 120579 sin120593cos 120574 sin120593 + sin 120574 sin 120579 cos120593 cos 120579 cos120593 sin 120574 sin120593 minus cos 120574 sin 120579 cos120593
minus sin 120574 cos 120579 sin 120579 cos 120574 cos 120579
]
]
]
[
[
[
[
119867119909119887
119867119910119887
119867119911119887
]
]
]
]
(16)
where [119867119909119899
119867119910119899
119867119911119899
]
119879 can be referred to by [19] InTaiyuan area (northern latitude 378∘ east longitude1125∘) [119867119909
119899
119867119910119899
119867119911119899
]
119879 is shown as (17) and the data of[119867119909119887
119867119910119887
119867119911119887
]
119879 can be obtained from the magnetometer
119867119909119899
= minus0216 times 10minus5119879
119867119910119899
= 0309 times 10minus4119879
119867119911119899
= minus043 times 10minus4119879
(17)
Supposing that themagnetic field intensity keeps on beingconstant during the flight ofMAV the heading ofMAVundergeographic coordinate system can be calculated by (16) and(17) based on the roll and pitch provided by accelerometer
3 Data Fusion Based on EKF
31 Optical Flow SensorAccelerometer Integrated System forVelocity and Position Measurements In our study the EKFfilter is employed to fuse the accelerometer and optical flowsensorThe velocity and position calculated by accelerometerunder navigation coordinates are selected as the state valueand the velocity and position calculated by optical flow sensorare selected as the observer value The estimation process isshown in Figure 3
Considering the nonlinear system state equation andobserved equation
X119896+1 = 119891 [X119896 119896] + B119896U119896 + Γ119896W119896
Z119896+1 = ℎ [X119896+1 119896 + 1] + V119896+1(18)
where X119896 = [119883119899 119884119899 119885119899 119881119909119899
119881119910119899
119881119911119899
]
119879 is state vectorwhich includes the velocity information and position infor-mation of MAV Z119896 = [119909 119910 119885119888]
119879 is observer vector whichincludes the optical flow data of directions 119909 and 119910 fromoptical flow sensor and the data 119885119888 obtained from ultrasonicsensors U119896 = [0 0 0 119886119909
119899
119886119910119899
119886119911119899
]
119879 is the control vector ofsystem that can be obtained by the accelerometer data aftercoordinate matrix transformation B119896 is matrix of controlallocation Γ119896 is matrix of noise allocation W119896 is matrix ofprocess noise V119896 is observer noise 119891 represents the systemstate function ℎ represents the observation function
Substituting the state and observed equation into EKF thetime renewal equation is
X119896+1119896 = 119891 [X119896 119896] + B119896U119896
P119896+1119896 = Φ119896+1119896P119896Φ119879
119896+1119896+ Γ119896Q119896Γ
119879
119896
(19)
Journal of Sensors 5
Acc
Opticalflow
Sonar
Gyro
EKF
Position
Velocity
Zc
(Xn Yn Zn)
(Vx Vy Vz)
(ax ay az)
(120596x 120596y 120596z)
(x y)
Figure 3 Optical flow sensoraccelerometer integrated system
Acc
Magneto-meter
Gyro
ExtendedKalman
filter
Altitude
Gauss-Newtonmethod
4th-order Runge-Kutta
q(m)
q
q(i)
H
120596
a
(120601 120579 120574)
Figure 4 Gyroscopeaccelerometermagnetometer integrated sys-tem
Measurement renewal equation is
K119896+1 = P119896+1119896H119896+1 (H119896+1P119896+1119896H119879
119896+1+ R119896+1)
minus1
X119896+1 = X119896+1119896 + K119896+1 Z119896+1 minus ℎ [X119896+1119896 119896 + 1]
P119896+1 = (I minus K119896+1H119896+1)P119896+1119896 (I minus K119896+1H119896+1)minus1
+ K119896+1R119896+1K119879
119896+1
(20)
where Φ119896+1119896 = (120597119891[X119896 119896]120597X119879119896 )|X119896=X119896
and H119896+1119896 =
(120597ℎ[X119896+1 119896 + 1]120597X119879119896+1)|X119896+1=X119896+1119896
From the process of EKF mentioned above the data for
position and velocity of MAV can be obtained in geographiccoordinate system
32 GyroscopeAccelerometerMagnetometer Integrated Sys-tem Based on EKF The attitude of MAV can be obtainedthrough the integration of the angular rate from gyroscopeoutput signal however the performance ofMEMS gyroscopewould be influenced by drift The integrated accelerome-termagnetometer system can provide attitude informationwithout drift therefore it is necessary to fuse the data ofmultisensors by using EKF The filtering process is shownas Figure 4 the system state vector can be expressed asX119896 = [1199020 1199021 1199022 1199023 120596119909 120596119910 120596119911]
119879 where [1199020 1199021 1199022 1199023]119879 is
quaternion of the system state it can be calculated by fourth-order Runge-Kutta method [120596119909 120596119910 120596119911]
119879 is the output ofgyroscope
The system observation vector can be expressed as Z119896 =[1199020 1199021 1199022 1199023]
119879 which can be calculated by Gauss-Newtonmethod based on the data of accelerometer and magnetome-ter
33 Optical Flow SensorINSMagnetometer Integrated Navi-gation Scheme The effective estimation of MAV velocity andposition can be obtained by using optical flow sensorINSintegrated navigation system based on EKF no matter understationary status or motion status According to the char-acteristics of attitude measurements by using gyroscopeand accelerometermagnetometer accelerometer and mag-netometer are integrated to calibrate the gyroscope duringstationary or uniform motion state when the motion stateis detected as accelerating or decelerating the standalonegyroscopes are used to obtain the attitude by strap-downcalculatingThemotion state is detected by optic flow sensorThe overall navigation scheme is shown in Figure 5
4 Experiments and Verification
In order to verify the proposed optical flow sensorINSmagnetometer integrated navigation system a MAV flightexperiment was carried out The experiment location was inthe stadium of North University of China Taiyuan As shownin Figure 6 we can see that during the flight procedure theMAV kept flying to the north The flying distance was 50meters and the flight height is 15 meters
41 Experiments Platform As shown in Figures 7 and 8 theautonomous MAV is used as flight platform (Figure 7(a))STM32F103Z is selected as the flight control proces-sor (Figure 7(b)) the optical flow sensor is produced by3D Robtics Corporation which is named as PX4FLOW(Figure 7(c)) the IMU is MPU6050 (Figure 7(d)) the mag-netometer is HMC3883L which is produced by HoneywellLimited (Figure 7(d)) DJ1 2312 which is produced by DJI isselected as the MAVmotor (Figure 7(e)) and HC-12 wirelessserial interface module (Figure 7(f)) is used to transmit thesensorrsquos data fromMAV to PC
42 Verification Results Figures 9ndash11 are the velocity estima-tion results position estimation results and attitude estima-tion results respectively Table 1 is the end position compari-son results between INS only and OFSINSmagnetometer Itcan be concluded that (1) in the process of velocity estimationand position estimation the OFSINSmagnetometer basedon EKF can decrease the drift of INS effectively For examplefrom Figure 9 we can see that the position drift is about 8meters after 50 meters trajectory without the correction ofOFS and magnetometer and the position drift is decreasedto less than 1 meter after using the integrated algorithmand (2) in the process of attitude estimation the roll anglepitch angle and the yaw angle can be effectively tracked byOFSINSmagnetometer based on EKF during static and uni-form velocity status And after nonuniform velocity motionthe attitude can be corrected immediately
6 Journal of Sensors
Table 1 Comparison results between INS only and OFSINSmagnetometer at the end position
Ground truth position at the end INS only OFSINSmagnetometerDirections Ground truth value Measurements Error Estimation Error119883 0 minus187 mdash 025 mdash119884 50 578 156 509 18119885 0 078 mdash 014 mdash
Start
Read the output ofoptical flow sensor
Stationary state oruniform motion
Attitude determination by
Output the attitude andupdate the transfer matrix
Velocity and position determinationby optical flow sensorINS
Attitude determinationby stand-alone gyro
gyroaccmagnetometer
Figure 5 The flow chart of optical flow sensorINSmagnetometer integrated navigation system
N
E
Start
End
Figure 6 The experiment trajectory
Journal of Sensors 7
(b)
(c)
(d)(e)(f)
(a)
Figure 7 The hardware experiment platform
HC12MPU6050 PX4FLOW
Figure 8 The INSOFSmagnetometer integrated navigation system
Figure 12 is the trajectory comparison results betweenground truth INS only and EKF It can be concluded that theproposed optical flow sensorINSmagnetometer integratednavigation system can provide a higher accurate navigationresult compared to INS only navigation system
5 Conclusion
In this paper an optical flow sensorINSmagnetometerintegrated navigation system is proposed for MAV The
proposed method which is based on EKF combines opticalflow sensor INS and magnetometer information to estimatethe attitude velocity and position of MAV Specifically thegyro accelerator and magnetometer information are fusedtogether to estimate theMAV attitude when theMAV is staticor uniformlymoving and the gyro only is used to estimate theMAV attitude when the MAV is accelerating or deceleratingExperiment results show that the proposed method whichcan significantly reduce the errors for navigation positionvelocity and attitude compared with the INS only navigation
8 Journal of Sensors
Time (s) Time (s) Time (s)0 10 15 20 25
Velo
city
(ms
)
Velo
city
(ms
)
Velo
city
(ms
)
minus02
0
02
04
06
08
1
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25minus05
0
05
1
15
2
25
3
35
4
10 15 20 25minus08
minus06
minus04
minus02
0
02
04
06
08
1Use EKF to estimate the VzUse EKF to estimate the VyUse EKF to estimate the Vx
5 0 5 0 5
Figure 9 The velocity estimation results
10 15 20 25
Dist
ance
(m)
minus2
minus15
minus1
minus05
0
05
1Use EKF to estimate the X
INS onlyEKF
INS onlyEKF
INS onlyEKF
Time (s)Time (s) Time (s)0 10 15 20 25
minus10
0
10
20
30
40
50
60Use EKF to estimate the Y
10 15 20 25
Dist
ance
(m)
Dist
ance
(m)
0
05
1
15
2
25 Use EKF to estimate the Z
50 5 0 5
Figure 10 The position estimation results
system can effectively improve the navigation performanceof MAV with a significant value of engineering application
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thisworkwas supported in part by the ChinaNational Fundsfor Distinguished Young Scientists (51225504) the National973 Program (2012CB723404) the National Natural ScienceFoundation of China (91123016 61171056) the ResearchProject Supported by Shanxi Scholarship Council of China
Journal of Sensors 9
Time (s)0 10 15 20 25
Roll
angl
e (de
g)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
0
1Use EKF to estimate the roll angle
Time (s) Time (s)5 10 15 20 25
Pitc
h an
gle (
deg
)
00 50
1
2
3
4
5
6Use EKF to estimate the pitch angle
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25
Yaw
angl
e (de
g)
minus2
0
2
4
6
8
10
12Use EKF to estimate the yaw angle
5
Figure 11 The attitude estimation results
050
Distance X (m)minus05
minus1minus15
Trajectory
minus2minus200
Distance Y (m)
2040
15
1
0
2
05
25
60
Dist
ance
Z (m
)
EKFGround truthINS only
Figure 12 Trajectory comparison results between ground truth INSonly and EKF
(2015-082) and the College Funding of North University ofChina (110246)
References
[1] C Friedman I Chopra and O Rand ldquoIndooroutdoor scan-matching based mapping technique with a helicopter MAV inGPS-denied environmentrdquo International Journal of Micro AirVehicles vol 7 no 1 pp 55ndash70 2015
[2] Y Hu H L Zhang and C Tan ldquoThe effect of the aerofoilthickness on the performance of theMAV scale cycloidal rotorrdquoAeronautical Journal vol 119 pp 343ndash364 2015
[3] M Samani M Tafreshi I Shafieenejad and A A NikkhahldquoMinimum-time open-loop and closed-loop optimal guidancewith GA-PSO and neural fuzzy for Samarai MAV flightrdquo IEEEAerospace and Electronic System Magazine vol 30 pp 28ndash372015
[4] G Flores S T Zhou R Lozano and P Castillo ldquoA visionand GPS-based real-time trajectory planning for a MAV inunknown and low-sunlight environmentsrdquo Journal of Intelligentamp Robotic Systems vol 74 no 1-2 pp 59ndash67 2014
[5] A Ali and N El-Sheimy ldquoLow-cost MEMS-based pedestriannavigation technique for GPS-denied areasrdquo Journal of Sensorsvol 2013 Article ID 197090 10 pages 2013
[6] X Chen C Shen W-B Zhang M Tomizuka Y Xu andK Chiu ldquoNovel hybrid of strong tracking Kalman filter andwavelet neural network for GPSINS during GPS outagesrdquoMeasurement vol 46 no 10 pp 3847ndash3854 2013
[7] T Zhang and X S Xu ldquoA new method of seamless landnavigation for GPSINS integrated systemrdquo Measurement vol45 no 4 pp 691ndash701 2012
[8] R Song X Y Chen C Shen and H Zhang ldquoModelingFOG drift using back-propagation neural network optimizedby artificial fish swarm algorithmrdquo Journal of Sensors vol 2014Article ID 273043 6 pages 2014
[9] H Q Huang X Y Chen Z K Zhou Y Xu and C P Lv ldquoStudyof the algorithm of backtracking decoupling and adaptiveextended kalman filter based on the quaternion expanded to thestate variable for underwater glider navigationrdquo Sensors vol 14no 12 pp 23041ndash23066 2014
[10] D H Yi T H Lee and D I Cho ldquoAfocal optical flow sensor forreducing vertical height sensitivity in indoor robot localizationand navigationrdquo Sensors vol 15 no 5 pp 11208ndash11221 2015
10 Journal of Sensors
[11] H Chao Y Gu and M Napolitano ldquoA survey of optical flowtechniques for UAV navigation applicationsrdquo in Proceedingsof the International Conference on Unmanned Aircraft Systems(ICUAS rsquo13) pp 710ndash716 IEEE Atlanta Ga USA May 2013
[12] F Martınez A Manzanera and E Romero ldquoAutomatic analysisand characterization of the hummingbird wings motion usingdense optical flow featuresrdquo Bioinspiration amp Biomimetics vol10 no 1 Article ID 016006 2015
[13] M P Rodriguez and A Nygren ldquoMotion estimation in cardiacfluorescence imaging with scale-space landmarks and opticalflow a comparative studyrdquo IEEE Transactions on BiomedicalEngineering vol 62 no 2 pp 774ndash782 2015
[14] W D Ding J LWang S L Han et al ldquoAdding optical flow intothe GPSINS integration for UAV navigationrdquo in Proceedings ofthe International Global Navigation Satellite Systems Society pp1ndash13 Surfers Paradise Australia 2009
[15] D AMercado G Flores P Castillo J Escareno and R LozanoldquoGPSINSOptic flow data fusion for position and velocityestimationrdquo in Proceedings of the International Conference onUnmanned Aircraft Systems (ICUAS rsquo13) pp 486ndash491 AtlantaGa USA May 2013
[16] M B Rhudy H Y Chao and Y Gu ldquoWide-field opticalflow aided inertial navigation for unmanned aerial vehiclesrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo14) pp 674ndash679 IEEEChicago Ill USA September 2014
[17] K Gageik M Strohmeier and S Montenegro ldquoAn autonomousUAV with an optical flow sensor for positioning and naviga-tionrdquo International Journal of Advanced Robotic Systems vol 10pp 1ndash9 2013
[18] D Honegger L Meier P Tanskanen and M Pollefeys ldquoAnopen source and open hardware embedded metric opticalflow CMOS camera for indoor and outdoor applicationsrdquo inProceedings of the IEEE International Conference on Roboticsand Automation (ICRA rsquo13) pp 1736ndash1741 Karlsruhe GermanyMay 2013
[19] H-D Zhao H-S Cao J-Z Zhu and H-S Zhang ldquoMethodof attitude measurement with magnetometer and gyroscoperdquoJournal of North University of China vol 31 no 6 pp 631ndash6352010 (Chinese)
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Journal of Sensors
Search area
Target block
Preceding frame Current frame
i
j
Optical flow vector
Target block in current frame
xp(i j)
d
xc(i + Δi j + Δj)
Δi
V Δj
Figure 1 Block matching algorithm based on sum of absolute differences
fusion method for position and velocity estimation experi-ment results showed that a good velocity measurement couldbe obtained by optical flow under rough GPS conditionsRhudy et al [16] aided wide-field optical flow to INS for UAVwhere the wide-field optical flow was used to regulate INSdrift for the purpose of GPS-denied navigation Gageik et al[17] applied an optical flow sensor for 2D positioning of UAVand position hold result showed that the standard deviationof the position error was just 10 cm and the position error wasjust about 30 cm after landing It can be clearly seen that theoptical flow is an effective solution for velocity and positionmeasurement However traditional optical flow is detectedby video camera which is not suitable for MAV because ofthe weight size and power In 2013 an optical flow sensorbased on a machine vision CMOS image sensor for MAVwas proposed and named as PX4FLOW [18] and the indoorverification results showed that the error was just 05m withthe overall trajectory being 2844m Compared to traditionaloptical flow sensors PX4FLOW is of low power low latencysmall size and low cost therefore it is very suitable for MAVapplications
In this paper an optical flow sensorINSmagnetometerintegrated navigation system is proposed for MAV whereoptical flow sensor is used to measure the velocity andposition of the MAV and the magnetometer is used tomeasure the attitude of the MAV then these navigationparameters are applied to calibrate the drift of INS by usingan extend Kalman filter This paper is organized as followsSection 2 is the theory of velocity and position estimationby optical flow The data fusion model is given in Section 3Section 4 is the experiment and verification Section 5 is theconclusion
2 Estimation of Velocity and Position byOptical Flow Sensor
21 The Calculation of Optical Flow Optical flow is the pro-jection of 3D relative motion onto a 2D image plane In order
to calculate the optical flow the researchers have proposedmany solutions such as Lucas-Kanade algorithm Horn-Schunck algorithm image interpolation algorithm blockmatching algorithm and feature matching algorithm In ourstudy considering the complexity of the software calculationand hardware platform the blockmatching algorithm (BMA)based on minimum mean absolute error (MMAE) and thesum of absolute differences (SAD) are selected to calculatethe optical flow which is shown in Figure 1
As shown in Figure 1 119909119901(119894 119895) is set as the gray value of119899 times 119899 target block selected from the previous frame and119909119888(119894 + Δ119894 119895 + Δ119895) is the gray value of the target block which isto be matched in the searching area of current frame where1 le 119894 119895 le 119899 minus119889 le Δ119894 Δ119895 le 119889 The principle of BMA based onMMAE and the SAD is to search Δ119894 and Δ119895 which satisfy (1)then the optical flow vector V = 119903(Δ119894 Δ119895)
119879 can be obtainedwhere the unit of V is pixelsec 119903 is the sample frequencyof the camera and the unit is framesec 119880 is the minimummean absolute error
SAD (Δ119894 Δ119895) =119899
sum
119895=1
119899
sum
119895=1
10038161003816100381610038161003816119909119888 (119894 + Δ119894 119895 + Δ119895) minus 119909119901 (119894 119895)
10038161003816100381610038161003816 (1)
119880 = min(Δ119894Δ119895)
SAD (Δ119894 Δ119895) (2)
V = 119903 (Δ119894 Δ119895)119879100381610038161003816100381610038161003816119880 (3)
In the initial state a target is selected at the original pointof the imaging plane the target block will move when theMAV moves In the searching area of the current frame theoptical flow vector of the target block can be obtained bycalculating theminimumSADbetween the current block andthe previous block
In the experiment the images which are perpendicularto the camera are collected In the whole collecting process adata block which is 8 times 8 pixel is used as the block matchingobject and the searching area contains plusmn4 pixels So there
Journal of Sensors 3
Pc (Xc Yc Zc)
p (x y f)
f
XcYc
O
Zc
Figure 2 The model of pin-hole image plane
are 64 pixel points and 81 candidate vector directions in eachframe image After obtaining each frame image the meanabsolute errors of each candidate vector are calculated andthe minimum value is selected as the optical flow vector
22 The Model of Optical Flow The motion model of opticalflow is projecting the three-dimensional motion onto thetwo-dimensional image plane of the camera There are twocommon optical flow estimation models one is pin-holeimage plane approach which is derived from the principleof insect and vertebrate visual system the other is sphericalimaging surface approach which is derived from insectcompound eyes In our study the pin-hole image planeapproach is used to estimate the motion of MAV undergeographic coordinate system
The pin-hole image plane model is shown as in Figure 2Pc = [119883119888 119884119888 119885119888]
119879 is set as a point under camera coordinatesystem 119891 stands for the focal length so Pc can be expressedas p = [119909 119910 119891]119879
p = 119891Pc119885119888
(4)
119909 = 119891
119883119888
119885119888
(5)
119910 = 119891
119884119888
119885119888
(6)
Considering any point P on the ground point P has thefollowing relationship relative to the MAV under the cameracoordinate system
Vc = minusTc minus 120596 times Pc (7)
Equation (7) is expanded in three dimensions and (8) canbe obtained
119881119909119888
= minus119879119909119888
minus (120596119910119885119888 minus 120596119911119884119888)
119881119910119888
= minus119879119910119888
minus (120596119911119883119888 minus 120596119909119885119888)
119881119911119888
= minus119879119911119888
minus (120596119909119884119888 minus 120596119910119883119888)
(8)
where 120596 = [120596119909 120596119910 120596119911]119879 is angular velocity of MAV Tc =
[119879119909119888
119879119910119888
119879119911119888
]119879 is average velocity of MAV under camera
coordinate systemAfter derivation calculus to (4) the relationship between
the velocity ofPc under the camera coordinate system and thevelocity of p under the image plane can be obtained
flowΔtime
= k = 119891119885Vc minus 119881119911Pc
1198852119888
(9)
where k = [V119909 V119910 V119911]119879 and (10)ndash(12) can obtained by
expanding (9)
V119909 =119891
1198852119888
(119881119909119888
119885119888 minus 119881119911119885119909) (10)
V119910 =119891
1198852119888
(119881119910119888
119885119888 minus 119881119911119885119910) (11)
V119911 = 0 (12)
Substituting (8) into (10) and (11) (13) can be obtained
V119909 =119879119911119888
119909 minus 119879119909119888
119891
119885119888
minus 120596119910119891 + 120596119911119910 +
120596119909119909119910 minus 1205961199101199092
119891
V119910 =119879119911119888
119910 minus 119879119910119888
119891
119885119888
+ 120596119909119891 minus 120596119909119910 +
1205961199091199102minus 120596119910119909119910
119891
(13)
In (13) V119909 and V119910 are the optical flow components ondirections119909 and119910 which can be calculated by SADandBMA119885119888 can be obtained by ultrasonic which was integrated in theoptical flow sensor Angular velocity 120596119909 120596119910 and 120596119911 can beobtained by gyroscope 119909 and 119910 can be substituted by (2)and (3) Therefore the translational velocity Tc of the MAVunder the camera coordinate system can be estimated andtheMAV velocity under geographic coordinate system can becalculated through coordinate transformational matrix Cn
c After integration of velocity the data for position ofMAV canbe obtained at last
23 Attitude Estimation Based on AccelerometerMagnetome-ter By measuring the gravitational field the accelerometercan determine the roll and pitch of the MAV under thecondition of no own acceleration by measuring the geomag-netic field the magnetometer can determine the heading ofMAV based on the vehiclersquos attitude information provided byaccelerometer Then the whole attitude information withoutaccumulated error can be obtained by integrating accelerom-etermagnetometer
231 The Roll and Pitch Obtained by Accelerometer Thecomponent of gravity vector under the geographic coordi-nate system is [0 0 minus119892]
119879 When the vehicle is static (norelative acceleration to the navigation coordinate system)the measured value of accelerometer which is fixed in thecarrier coordinate system is a119887 = [119886119909
119887
119886119910119887
119886119911119887
]
119879 Theheading of the vehicle has no influence on the output of
4 Journal of Sensors
accelerometers of directions 119909 and 119910 due to the gravitationalacceleration perpendicular to horizontal plane Therefore itcan be concluded that
[
[
[
[
119886119909119887
119886119910119887
119886119911119887
]
]
]
]
=[
[
[
cos 120574 sin 120574 sin 120579 minus sin 120574 cos 1205790 cos 120579 sin 120579
sin 120574 minus cos 120574 sin 120579 cos 120574 cos 120579
]
]
]
[
[
[
0
0
minus119892
]
]
]
(14)
The roll and pitch can be calculated
120579 = arcsin(minus119886119910119887
119892
)
120574 = arctan(minus119886119909119887
119886119911119887
)
(15)
Thismethod uses the projection information of the earthrsquosgravitational acceleration in carrier coordinate system toreflect the attitude information of the vehicle so the above
equations are correct only under the condition that there isno acceleration of the vehicle Actually the vehicles are notalways of static or uniform motion and the measured valuesof accelerometer are not equal to the component of gravita-tional acceleration under MAV coordinate system anymoreonce the carrier is under accelerated motion Therefore thismethod only can be used for measurement in static state andit is necessary to find another attitude measuring method fordynamic conditions
232 The Heading Obtained by Magnetometer The com-ponent of earthrsquos magnetic field intensity under geographiccoordinate system is Hn = [119867119909
119899
119867119910119899
119867119911119899
]
119879 The magne-tometers are fixed on the carrier and the coordinate of themagnetometers is the same as the carrier coordinate system119865119887 and the component of magnetic field intensity under thecarrier coordinate system is Hb = [119867119909
119887
119867119910119887
119867119911119887
]
119879 Theprojection of magnetic field intensity to the geographic andcamera coordinate systems can be presented as
[
[
[
[
119867119909119899
119867119910119899
119867119911119899
]
]
]
]
=[
[
[
cos 120574 cos120593 minus sin 120574 sin 120579 sin120593 minus cos 120579 sin120593 sin 120574 cos120593 + cos 120574 sin 120579 sin120593cos 120574 sin120593 + sin 120574 sin 120579 cos120593 cos 120579 cos120593 sin 120574 sin120593 minus cos 120574 sin 120579 cos120593
minus sin 120574 cos 120579 sin 120579 cos 120574 cos 120579
]
]
]
[
[
[
[
119867119909119887
119867119910119887
119867119911119887
]
]
]
]
(16)
where [119867119909119899
119867119910119899
119867119911119899
]
119879 can be referred to by [19] InTaiyuan area (northern latitude 378∘ east longitude1125∘) [119867119909
119899
119867119910119899
119867119911119899
]
119879 is shown as (17) and the data of[119867119909119887
119867119910119887
119867119911119887
]
119879 can be obtained from the magnetometer
119867119909119899
= minus0216 times 10minus5119879
119867119910119899
= 0309 times 10minus4119879
119867119911119899
= minus043 times 10minus4119879
(17)
Supposing that themagnetic field intensity keeps on beingconstant during the flight ofMAV the heading ofMAVundergeographic coordinate system can be calculated by (16) and(17) based on the roll and pitch provided by accelerometer
3 Data Fusion Based on EKF
31 Optical Flow SensorAccelerometer Integrated System forVelocity and Position Measurements In our study the EKFfilter is employed to fuse the accelerometer and optical flowsensorThe velocity and position calculated by accelerometerunder navigation coordinates are selected as the state valueand the velocity and position calculated by optical flow sensorare selected as the observer value The estimation process isshown in Figure 3
Considering the nonlinear system state equation andobserved equation
X119896+1 = 119891 [X119896 119896] + B119896U119896 + Γ119896W119896
Z119896+1 = ℎ [X119896+1 119896 + 1] + V119896+1(18)
where X119896 = [119883119899 119884119899 119885119899 119881119909119899
119881119910119899
119881119911119899
]
119879 is state vectorwhich includes the velocity information and position infor-mation of MAV Z119896 = [119909 119910 119885119888]
119879 is observer vector whichincludes the optical flow data of directions 119909 and 119910 fromoptical flow sensor and the data 119885119888 obtained from ultrasonicsensors U119896 = [0 0 0 119886119909
119899
119886119910119899
119886119911119899
]
119879 is the control vector ofsystem that can be obtained by the accelerometer data aftercoordinate matrix transformation B119896 is matrix of controlallocation Γ119896 is matrix of noise allocation W119896 is matrix ofprocess noise V119896 is observer noise 119891 represents the systemstate function ℎ represents the observation function
Substituting the state and observed equation into EKF thetime renewal equation is
X119896+1119896 = 119891 [X119896 119896] + B119896U119896
P119896+1119896 = Φ119896+1119896P119896Φ119879
119896+1119896+ Γ119896Q119896Γ
119879
119896
(19)
Journal of Sensors 5
Acc
Opticalflow
Sonar
Gyro
EKF
Position
Velocity
Zc
(Xn Yn Zn)
(Vx Vy Vz)
(ax ay az)
(120596x 120596y 120596z)
(x y)
Figure 3 Optical flow sensoraccelerometer integrated system
Acc
Magneto-meter
Gyro
ExtendedKalman
filter
Altitude
Gauss-Newtonmethod
4th-order Runge-Kutta
q(m)
q
q(i)
H
120596
a
(120601 120579 120574)
Figure 4 Gyroscopeaccelerometermagnetometer integrated sys-tem
Measurement renewal equation is
K119896+1 = P119896+1119896H119896+1 (H119896+1P119896+1119896H119879
119896+1+ R119896+1)
minus1
X119896+1 = X119896+1119896 + K119896+1 Z119896+1 minus ℎ [X119896+1119896 119896 + 1]
P119896+1 = (I minus K119896+1H119896+1)P119896+1119896 (I minus K119896+1H119896+1)minus1
+ K119896+1R119896+1K119879
119896+1
(20)
where Φ119896+1119896 = (120597119891[X119896 119896]120597X119879119896 )|X119896=X119896
and H119896+1119896 =
(120597ℎ[X119896+1 119896 + 1]120597X119879119896+1)|X119896+1=X119896+1119896
From the process of EKF mentioned above the data for
position and velocity of MAV can be obtained in geographiccoordinate system
32 GyroscopeAccelerometerMagnetometer Integrated Sys-tem Based on EKF The attitude of MAV can be obtainedthrough the integration of the angular rate from gyroscopeoutput signal however the performance ofMEMS gyroscopewould be influenced by drift The integrated accelerome-termagnetometer system can provide attitude informationwithout drift therefore it is necessary to fuse the data ofmultisensors by using EKF The filtering process is shownas Figure 4 the system state vector can be expressed asX119896 = [1199020 1199021 1199022 1199023 120596119909 120596119910 120596119911]
119879 where [1199020 1199021 1199022 1199023]119879 is
quaternion of the system state it can be calculated by fourth-order Runge-Kutta method [120596119909 120596119910 120596119911]
119879 is the output ofgyroscope
The system observation vector can be expressed as Z119896 =[1199020 1199021 1199022 1199023]
119879 which can be calculated by Gauss-Newtonmethod based on the data of accelerometer and magnetome-ter
33 Optical Flow SensorINSMagnetometer Integrated Navi-gation Scheme The effective estimation of MAV velocity andposition can be obtained by using optical flow sensorINSintegrated navigation system based on EKF no matter understationary status or motion status According to the char-acteristics of attitude measurements by using gyroscopeand accelerometermagnetometer accelerometer and mag-netometer are integrated to calibrate the gyroscope duringstationary or uniform motion state when the motion stateis detected as accelerating or decelerating the standalonegyroscopes are used to obtain the attitude by strap-downcalculatingThemotion state is detected by optic flow sensorThe overall navigation scheme is shown in Figure 5
4 Experiments and Verification
In order to verify the proposed optical flow sensorINSmagnetometer integrated navigation system a MAV flightexperiment was carried out The experiment location was inthe stadium of North University of China Taiyuan As shownin Figure 6 we can see that during the flight procedure theMAV kept flying to the north The flying distance was 50meters and the flight height is 15 meters
41 Experiments Platform As shown in Figures 7 and 8 theautonomous MAV is used as flight platform (Figure 7(a))STM32F103Z is selected as the flight control proces-sor (Figure 7(b)) the optical flow sensor is produced by3D Robtics Corporation which is named as PX4FLOW(Figure 7(c)) the IMU is MPU6050 (Figure 7(d)) the mag-netometer is HMC3883L which is produced by HoneywellLimited (Figure 7(d)) DJ1 2312 which is produced by DJI isselected as the MAVmotor (Figure 7(e)) and HC-12 wirelessserial interface module (Figure 7(f)) is used to transmit thesensorrsquos data fromMAV to PC
42 Verification Results Figures 9ndash11 are the velocity estima-tion results position estimation results and attitude estima-tion results respectively Table 1 is the end position compari-son results between INS only and OFSINSmagnetometer Itcan be concluded that (1) in the process of velocity estimationand position estimation the OFSINSmagnetometer basedon EKF can decrease the drift of INS effectively For examplefrom Figure 9 we can see that the position drift is about 8meters after 50 meters trajectory without the correction ofOFS and magnetometer and the position drift is decreasedto less than 1 meter after using the integrated algorithmand (2) in the process of attitude estimation the roll anglepitch angle and the yaw angle can be effectively tracked byOFSINSmagnetometer based on EKF during static and uni-form velocity status And after nonuniform velocity motionthe attitude can be corrected immediately
6 Journal of Sensors
Table 1 Comparison results between INS only and OFSINSmagnetometer at the end position
Ground truth position at the end INS only OFSINSmagnetometerDirections Ground truth value Measurements Error Estimation Error119883 0 minus187 mdash 025 mdash119884 50 578 156 509 18119885 0 078 mdash 014 mdash
Start
Read the output ofoptical flow sensor
Stationary state oruniform motion
Attitude determination by
Output the attitude andupdate the transfer matrix
Velocity and position determinationby optical flow sensorINS
Attitude determinationby stand-alone gyro
gyroaccmagnetometer
Figure 5 The flow chart of optical flow sensorINSmagnetometer integrated navigation system
N
E
Start
End
Figure 6 The experiment trajectory
Journal of Sensors 7
(b)
(c)
(d)(e)(f)
(a)
Figure 7 The hardware experiment platform
HC12MPU6050 PX4FLOW
Figure 8 The INSOFSmagnetometer integrated navigation system
Figure 12 is the trajectory comparison results betweenground truth INS only and EKF It can be concluded that theproposed optical flow sensorINSmagnetometer integratednavigation system can provide a higher accurate navigationresult compared to INS only navigation system
5 Conclusion
In this paper an optical flow sensorINSmagnetometerintegrated navigation system is proposed for MAV The
proposed method which is based on EKF combines opticalflow sensor INS and magnetometer information to estimatethe attitude velocity and position of MAV Specifically thegyro accelerator and magnetometer information are fusedtogether to estimate theMAV attitude when theMAV is staticor uniformlymoving and the gyro only is used to estimate theMAV attitude when the MAV is accelerating or deceleratingExperiment results show that the proposed method whichcan significantly reduce the errors for navigation positionvelocity and attitude compared with the INS only navigation
8 Journal of Sensors
Time (s) Time (s) Time (s)0 10 15 20 25
Velo
city
(ms
)
Velo
city
(ms
)
Velo
city
(ms
)
minus02
0
02
04
06
08
1
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25minus05
0
05
1
15
2
25
3
35
4
10 15 20 25minus08
minus06
minus04
minus02
0
02
04
06
08
1Use EKF to estimate the VzUse EKF to estimate the VyUse EKF to estimate the Vx
5 0 5 0 5
Figure 9 The velocity estimation results
10 15 20 25
Dist
ance
(m)
minus2
minus15
minus1
minus05
0
05
1Use EKF to estimate the X
INS onlyEKF
INS onlyEKF
INS onlyEKF
Time (s)Time (s) Time (s)0 10 15 20 25
minus10
0
10
20
30
40
50
60Use EKF to estimate the Y
10 15 20 25
Dist
ance
(m)
Dist
ance
(m)
0
05
1
15
2
25 Use EKF to estimate the Z
50 5 0 5
Figure 10 The position estimation results
system can effectively improve the navigation performanceof MAV with a significant value of engineering application
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thisworkwas supported in part by the ChinaNational Fundsfor Distinguished Young Scientists (51225504) the National973 Program (2012CB723404) the National Natural ScienceFoundation of China (91123016 61171056) the ResearchProject Supported by Shanxi Scholarship Council of China
Journal of Sensors 9
Time (s)0 10 15 20 25
Roll
angl
e (de
g)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
0
1Use EKF to estimate the roll angle
Time (s) Time (s)5 10 15 20 25
Pitc
h an
gle (
deg
)
00 50
1
2
3
4
5
6Use EKF to estimate the pitch angle
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25
Yaw
angl
e (de
g)
minus2
0
2
4
6
8
10
12Use EKF to estimate the yaw angle
5
Figure 11 The attitude estimation results
050
Distance X (m)minus05
minus1minus15
Trajectory
minus2minus200
Distance Y (m)
2040
15
1
0
2
05
25
60
Dist
ance
Z (m
)
EKFGround truthINS only
Figure 12 Trajectory comparison results between ground truth INSonly and EKF
(2015-082) and the College Funding of North University ofChina (110246)
References
[1] C Friedman I Chopra and O Rand ldquoIndooroutdoor scan-matching based mapping technique with a helicopter MAV inGPS-denied environmentrdquo International Journal of Micro AirVehicles vol 7 no 1 pp 55ndash70 2015
[2] Y Hu H L Zhang and C Tan ldquoThe effect of the aerofoilthickness on the performance of theMAV scale cycloidal rotorrdquoAeronautical Journal vol 119 pp 343ndash364 2015
[3] M Samani M Tafreshi I Shafieenejad and A A NikkhahldquoMinimum-time open-loop and closed-loop optimal guidancewith GA-PSO and neural fuzzy for Samarai MAV flightrdquo IEEEAerospace and Electronic System Magazine vol 30 pp 28ndash372015
[4] G Flores S T Zhou R Lozano and P Castillo ldquoA visionand GPS-based real-time trajectory planning for a MAV inunknown and low-sunlight environmentsrdquo Journal of Intelligentamp Robotic Systems vol 74 no 1-2 pp 59ndash67 2014
[5] A Ali and N El-Sheimy ldquoLow-cost MEMS-based pedestriannavigation technique for GPS-denied areasrdquo Journal of Sensorsvol 2013 Article ID 197090 10 pages 2013
[6] X Chen C Shen W-B Zhang M Tomizuka Y Xu andK Chiu ldquoNovel hybrid of strong tracking Kalman filter andwavelet neural network for GPSINS during GPS outagesrdquoMeasurement vol 46 no 10 pp 3847ndash3854 2013
[7] T Zhang and X S Xu ldquoA new method of seamless landnavigation for GPSINS integrated systemrdquo Measurement vol45 no 4 pp 691ndash701 2012
[8] R Song X Y Chen C Shen and H Zhang ldquoModelingFOG drift using back-propagation neural network optimizedby artificial fish swarm algorithmrdquo Journal of Sensors vol 2014Article ID 273043 6 pages 2014
[9] H Q Huang X Y Chen Z K Zhou Y Xu and C P Lv ldquoStudyof the algorithm of backtracking decoupling and adaptiveextended kalman filter based on the quaternion expanded to thestate variable for underwater glider navigationrdquo Sensors vol 14no 12 pp 23041ndash23066 2014
[10] D H Yi T H Lee and D I Cho ldquoAfocal optical flow sensor forreducing vertical height sensitivity in indoor robot localizationand navigationrdquo Sensors vol 15 no 5 pp 11208ndash11221 2015
10 Journal of Sensors
[11] H Chao Y Gu and M Napolitano ldquoA survey of optical flowtechniques for UAV navigation applicationsrdquo in Proceedingsof the International Conference on Unmanned Aircraft Systems(ICUAS rsquo13) pp 710ndash716 IEEE Atlanta Ga USA May 2013
[12] F Martınez A Manzanera and E Romero ldquoAutomatic analysisand characterization of the hummingbird wings motion usingdense optical flow featuresrdquo Bioinspiration amp Biomimetics vol10 no 1 Article ID 016006 2015
[13] M P Rodriguez and A Nygren ldquoMotion estimation in cardiacfluorescence imaging with scale-space landmarks and opticalflow a comparative studyrdquo IEEE Transactions on BiomedicalEngineering vol 62 no 2 pp 774ndash782 2015
[14] W D Ding J LWang S L Han et al ldquoAdding optical flow intothe GPSINS integration for UAV navigationrdquo in Proceedings ofthe International Global Navigation Satellite Systems Society pp1ndash13 Surfers Paradise Australia 2009
[15] D AMercado G Flores P Castillo J Escareno and R LozanoldquoGPSINSOptic flow data fusion for position and velocityestimationrdquo in Proceedings of the International Conference onUnmanned Aircraft Systems (ICUAS rsquo13) pp 486ndash491 AtlantaGa USA May 2013
[16] M B Rhudy H Y Chao and Y Gu ldquoWide-field opticalflow aided inertial navigation for unmanned aerial vehiclesrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo14) pp 674ndash679 IEEEChicago Ill USA September 2014
[17] K Gageik M Strohmeier and S Montenegro ldquoAn autonomousUAV with an optical flow sensor for positioning and naviga-tionrdquo International Journal of Advanced Robotic Systems vol 10pp 1ndash9 2013
[18] D Honegger L Meier P Tanskanen and M Pollefeys ldquoAnopen source and open hardware embedded metric opticalflow CMOS camera for indoor and outdoor applicationsrdquo inProceedings of the IEEE International Conference on Roboticsand Automation (ICRA rsquo13) pp 1736ndash1741 Karlsruhe GermanyMay 2013
[19] H-D Zhao H-S Cao J-Z Zhu and H-S Zhang ldquoMethodof attitude measurement with magnetometer and gyroscoperdquoJournal of North University of China vol 31 no 6 pp 631ndash6352010 (Chinese)
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Sensors 3
Pc (Xc Yc Zc)
p (x y f)
f
XcYc
O
Zc
Figure 2 The model of pin-hole image plane
are 64 pixel points and 81 candidate vector directions in eachframe image After obtaining each frame image the meanabsolute errors of each candidate vector are calculated andthe minimum value is selected as the optical flow vector
22 The Model of Optical Flow The motion model of opticalflow is projecting the three-dimensional motion onto thetwo-dimensional image plane of the camera There are twocommon optical flow estimation models one is pin-holeimage plane approach which is derived from the principleof insect and vertebrate visual system the other is sphericalimaging surface approach which is derived from insectcompound eyes In our study the pin-hole image planeapproach is used to estimate the motion of MAV undergeographic coordinate system
The pin-hole image plane model is shown as in Figure 2Pc = [119883119888 119884119888 119885119888]
119879 is set as a point under camera coordinatesystem 119891 stands for the focal length so Pc can be expressedas p = [119909 119910 119891]119879
p = 119891Pc119885119888
(4)
119909 = 119891
119883119888
119885119888
(5)
119910 = 119891
119884119888
119885119888
(6)
Considering any point P on the ground point P has thefollowing relationship relative to the MAV under the cameracoordinate system
Vc = minusTc minus 120596 times Pc (7)
Equation (7) is expanded in three dimensions and (8) canbe obtained
119881119909119888
= minus119879119909119888
minus (120596119910119885119888 minus 120596119911119884119888)
119881119910119888
= minus119879119910119888
minus (120596119911119883119888 minus 120596119909119885119888)
119881119911119888
= minus119879119911119888
minus (120596119909119884119888 minus 120596119910119883119888)
(8)
where 120596 = [120596119909 120596119910 120596119911]119879 is angular velocity of MAV Tc =
[119879119909119888
119879119910119888
119879119911119888
]119879 is average velocity of MAV under camera
coordinate systemAfter derivation calculus to (4) the relationship between
the velocity ofPc under the camera coordinate system and thevelocity of p under the image plane can be obtained
flowΔtime
= k = 119891119885Vc minus 119881119911Pc
1198852119888
(9)
where k = [V119909 V119910 V119911]119879 and (10)ndash(12) can obtained by
expanding (9)
V119909 =119891
1198852119888
(119881119909119888
119885119888 minus 119881119911119885119909) (10)
V119910 =119891
1198852119888
(119881119910119888
119885119888 minus 119881119911119885119910) (11)
V119911 = 0 (12)
Substituting (8) into (10) and (11) (13) can be obtained
V119909 =119879119911119888
119909 minus 119879119909119888
119891
119885119888
minus 120596119910119891 + 120596119911119910 +
120596119909119909119910 minus 1205961199101199092
119891
V119910 =119879119911119888
119910 minus 119879119910119888
119891
119885119888
+ 120596119909119891 minus 120596119909119910 +
1205961199091199102minus 120596119910119909119910
119891
(13)
In (13) V119909 and V119910 are the optical flow components ondirections119909 and119910 which can be calculated by SADandBMA119885119888 can be obtained by ultrasonic which was integrated in theoptical flow sensor Angular velocity 120596119909 120596119910 and 120596119911 can beobtained by gyroscope 119909 and 119910 can be substituted by (2)and (3) Therefore the translational velocity Tc of the MAVunder the camera coordinate system can be estimated andtheMAV velocity under geographic coordinate system can becalculated through coordinate transformational matrix Cn
c After integration of velocity the data for position ofMAV canbe obtained at last
23 Attitude Estimation Based on AccelerometerMagnetome-ter By measuring the gravitational field the accelerometercan determine the roll and pitch of the MAV under thecondition of no own acceleration by measuring the geomag-netic field the magnetometer can determine the heading ofMAV based on the vehiclersquos attitude information provided byaccelerometer Then the whole attitude information withoutaccumulated error can be obtained by integrating accelerom-etermagnetometer
231 The Roll and Pitch Obtained by Accelerometer Thecomponent of gravity vector under the geographic coordi-nate system is [0 0 minus119892]
119879 When the vehicle is static (norelative acceleration to the navigation coordinate system)the measured value of accelerometer which is fixed in thecarrier coordinate system is a119887 = [119886119909
119887
119886119910119887
119886119911119887
]
119879 Theheading of the vehicle has no influence on the output of
4 Journal of Sensors
accelerometers of directions 119909 and 119910 due to the gravitationalacceleration perpendicular to horizontal plane Therefore itcan be concluded that
[
[
[
[
119886119909119887
119886119910119887
119886119911119887
]
]
]
]
=[
[
[
cos 120574 sin 120574 sin 120579 minus sin 120574 cos 1205790 cos 120579 sin 120579
sin 120574 minus cos 120574 sin 120579 cos 120574 cos 120579
]
]
]
[
[
[
0
0
minus119892
]
]
]
(14)
The roll and pitch can be calculated
120579 = arcsin(minus119886119910119887
119892
)
120574 = arctan(minus119886119909119887
119886119911119887
)
(15)
Thismethod uses the projection information of the earthrsquosgravitational acceleration in carrier coordinate system toreflect the attitude information of the vehicle so the above
equations are correct only under the condition that there isno acceleration of the vehicle Actually the vehicles are notalways of static or uniform motion and the measured valuesof accelerometer are not equal to the component of gravita-tional acceleration under MAV coordinate system anymoreonce the carrier is under accelerated motion Therefore thismethod only can be used for measurement in static state andit is necessary to find another attitude measuring method fordynamic conditions
232 The Heading Obtained by Magnetometer The com-ponent of earthrsquos magnetic field intensity under geographiccoordinate system is Hn = [119867119909
119899
119867119910119899
119867119911119899
]
119879 The magne-tometers are fixed on the carrier and the coordinate of themagnetometers is the same as the carrier coordinate system119865119887 and the component of magnetic field intensity under thecarrier coordinate system is Hb = [119867119909
119887
119867119910119887
119867119911119887
]
119879 Theprojection of magnetic field intensity to the geographic andcamera coordinate systems can be presented as
[
[
[
[
119867119909119899
119867119910119899
119867119911119899
]
]
]
]
=[
[
[
cos 120574 cos120593 minus sin 120574 sin 120579 sin120593 minus cos 120579 sin120593 sin 120574 cos120593 + cos 120574 sin 120579 sin120593cos 120574 sin120593 + sin 120574 sin 120579 cos120593 cos 120579 cos120593 sin 120574 sin120593 minus cos 120574 sin 120579 cos120593
minus sin 120574 cos 120579 sin 120579 cos 120574 cos 120579
]
]
]
[
[
[
[
119867119909119887
119867119910119887
119867119911119887
]
]
]
]
(16)
where [119867119909119899
119867119910119899
119867119911119899
]
119879 can be referred to by [19] InTaiyuan area (northern latitude 378∘ east longitude1125∘) [119867119909
119899
119867119910119899
119867119911119899
]
119879 is shown as (17) and the data of[119867119909119887
119867119910119887
119867119911119887
]
119879 can be obtained from the magnetometer
119867119909119899
= minus0216 times 10minus5119879
119867119910119899
= 0309 times 10minus4119879
119867119911119899
= minus043 times 10minus4119879
(17)
Supposing that themagnetic field intensity keeps on beingconstant during the flight ofMAV the heading ofMAVundergeographic coordinate system can be calculated by (16) and(17) based on the roll and pitch provided by accelerometer
3 Data Fusion Based on EKF
31 Optical Flow SensorAccelerometer Integrated System forVelocity and Position Measurements In our study the EKFfilter is employed to fuse the accelerometer and optical flowsensorThe velocity and position calculated by accelerometerunder navigation coordinates are selected as the state valueand the velocity and position calculated by optical flow sensorare selected as the observer value The estimation process isshown in Figure 3
Considering the nonlinear system state equation andobserved equation
X119896+1 = 119891 [X119896 119896] + B119896U119896 + Γ119896W119896
Z119896+1 = ℎ [X119896+1 119896 + 1] + V119896+1(18)
where X119896 = [119883119899 119884119899 119885119899 119881119909119899
119881119910119899
119881119911119899
]
119879 is state vectorwhich includes the velocity information and position infor-mation of MAV Z119896 = [119909 119910 119885119888]
119879 is observer vector whichincludes the optical flow data of directions 119909 and 119910 fromoptical flow sensor and the data 119885119888 obtained from ultrasonicsensors U119896 = [0 0 0 119886119909
119899
119886119910119899
119886119911119899
]
119879 is the control vector ofsystem that can be obtained by the accelerometer data aftercoordinate matrix transformation B119896 is matrix of controlallocation Γ119896 is matrix of noise allocation W119896 is matrix ofprocess noise V119896 is observer noise 119891 represents the systemstate function ℎ represents the observation function
Substituting the state and observed equation into EKF thetime renewal equation is
X119896+1119896 = 119891 [X119896 119896] + B119896U119896
P119896+1119896 = Φ119896+1119896P119896Φ119879
119896+1119896+ Γ119896Q119896Γ
119879
119896
(19)
Journal of Sensors 5
Acc
Opticalflow
Sonar
Gyro
EKF
Position
Velocity
Zc
(Xn Yn Zn)
(Vx Vy Vz)
(ax ay az)
(120596x 120596y 120596z)
(x y)
Figure 3 Optical flow sensoraccelerometer integrated system
Acc
Magneto-meter
Gyro
ExtendedKalman
filter
Altitude
Gauss-Newtonmethod
4th-order Runge-Kutta
q(m)
q
q(i)
H
120596
a
(120601 120579 120574)
Figure 4 Gyroscopeaccelerometermagnetometer integrated sys-tem
Measurement renewal equation is
K119896+1 = P119896+1119896H119896+1 (H119896+1P119896+1119896H119879
119896+1+ R119896+1)
minus1
X119896+1 = X119896+1119896 + K119896+1 Z119896+1 minus ℎ [X119896+1119896 119896 + 1]
P119896+1 = (I minus K119896+1H119896+1)P119896+1119896 (I minus K119896+1H119896+1)minus1
+ K119896+1R119896+1K119879
119896+1
(20)
where Φ119896+1119896 = (120597119891[X119896 119896]120597X119879119896 )|X119896=X119896
and H119896+1119896 =
(120597ℎ[X119896+1 119896 + 1]120597X119879119896+1)|X119896+1=X119896+1119896
From the process of EKF mentioned above the data for
position and velocity of MAV can be obtained in geographiccoordinate system
32 GyroscopeAccelerometerMagnetometer Integrated Sys-tem Based on EKF The attitude of MAV can be obtainedthrough the integration of the angular rate from gyroscopeoutput signal however the performance ofMEMS gyroscopewould be influenced by drift The integrated accelerome-termagnetometer system can provide attitude informationwithout drift therefore it is necessary to fuse the data ofmultisensors by using EKF The filtering process is shownas Figure 4 the system state vector can be expressed asX119896 = [1199020 1199021 1199022 1199023 120596119909 120596119910 120596119911]
119879 where [1199020 1199021 1199022 1199023]119879 is
quaternion of the system state it can be calculated by fourth-order Runge-Kutta method [120596119909 120596119910 120596119911]
119879 is the output ofgyroscope
The system observation vector can be expressed as Z119896 =[1199020 1199021 1199022 1199023]
119879 which can be calculated by Gauss-Newtonmethod based on the data of accelerometer and magnetome-ter
33 Optical Flow SensorINSMagnetometer Integrated Navi-gation Scheme The effective estimation of MAV velocity andposition can be obtained by using optical flow sensorINSintegrated navigation system based on EKF no matter understationary status or motion status According to the char-acteristics of attitude measurements by using gyroscopeand accelerometermagnetometer accelerometer and mag-netometer are integrated to calibrate the gyroscope duringstationary or uniform motion state when the motion stateis detected as accelerating or decelerating the standalonegyroscopes are used to obtain the attitude by strap-downcalculatingThemotion state is detected by optic flow sensorThe overall navigation scheme is shown in Figure 5
4 Experiments and Verification
In order to verify the proposed optical flow sensorINSmagnetometer integrated navigation system a MAV flightexperiment was carried out The experiment location was inthe stadium of North University of China Taiyuan As shownin Figure 6 we can see that during the flight procedure theMAV kept flying to the north The flying distance was 50meters and the flight height is 15 meters
41 Experiments Platform As shown in Figures 7 and 8 theautonomous MAV is used as flight platform (Figure 7(a))STM32F103Z is selected as the flight control proces-sor (Figure 7(b)) the optical flow sensor is produced by3D Robtics Corporation which is named as PX4FLOW(Figure 7(c)) the IMU is MPU6050 (Figure 7(d)) the mag-netometer is HMC3883L which is produced by HoneywellLimited (Figure 7(d)) DJ1 2312 which is produced by DJI isselected as the MAVmotor (Figure 7(e)) and HC-12 wirelessserial interface module (Figure 7(f)) is used to transmit thesensorrsquos data fromMAV to PC
42 Verification Results Figures 9ndash11 are the velocity estima-tion results position estimation results and attitude estima-tion results respectively Table 1 is the end position compari-son results between INS only and OFSINSmagnetometer Itcan be concluded that (1) in the process of velocity estimationand position estimation the OFSINSmagnetometer basedon EKF can decrease the drift of INS effectively For examplefrom Figure 9 we can see that the position drift is about 8meters after 50 meters trajectory without the correction ofOFS and magnetometer and the position drift is decreasedto less than 1 meter after using the integrated algorithmand (2) in the process of attitude estimation the roll anglepitch angle and the yaw angle can be effectively tracked byOFSINSmagnetometer based on EKF during static and uni-form velocity status And after nonuniform velocity motionthe attitude can be corrected immediately
6 Journal of Sensors
Table 1 Comparison results between INS only and OFSINSmagnetometer at the end position
Ground truth position at the end INS only OFSINSmagnetometerDirections Ground truth value Measurements Error Estimation Error119883 0 minus187 mdash 025 mdash119884 50 578 156 509 18119885 0 078 mdash 014 mdash
Start
Read the output ofoptical flow sensor
Stationary state oruniform motion
Attitude determination by
Output the attitude andupdate the transfer matrix
Velocity and position determinationby optical flow sensorINS
Attitude determinationby stand-alone gyro
gyroaccmagnetometer
Figure 5 The flow chart of optical flow sensorINSmagnetometer integrated navigation system
N
E
Start
End
Figure 6 The experiment trajectory
Journal of Sensors 7
(b)
(c)
(d)(e)(f)
(a)
Figure 7 The hardware experiment platform
HC12MPU6050 PX4FLOW
Figure 8 The INSOFSmagnetometer integrated navigation system
Figure 12 is the trajectory comparison results betweenground truth INS only and EKF It can be concluded that theproposed optical flow sensorINSmagnetometer integratednavigation system can provide a higher accurate navigationresult compared to INS only navigation system
5 Conclusion
In this paper an optical flow sensorINSmagnetometerintegrated navigation system is proposed for MAV The
proposed method which is based on EKF combines opticalflow sensor INS and magnetometer information to estimatethe attitude velocity and position of MAV Specifically thegyro accelerator and magnetometer information are fusedtogether to estimate theMAV attitude when theMAV is staticor uniformlymoving and the gyro only is used to estimate theMAV attitude when the MAV is accelerating or deceleratingExperiment results show that the proposed method whichcan significantly reduce the errors for navigation positionvelocity and attitude compared with the INS only navigation
8 Journal of Sensors
Time (s) Time (s) Time (s)0 10 15 20 25
Velo
city
(ms
)
Velo
city
(ms
)
Velo
city
(ms
)
minus02
0
02
04
06
08
1
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25minus05
0
05
1
15
2
25
3
35
4
10 15 20 25minus08
minus06
minus04
minus02
0
02
04
06
08
1Use EKF to estimate the VzUse EKF to estimate the VyUse EKF to estimate the Vx
5 0 5 0 5
Figure 9 The velocity estimation results
10 15 20 25
Dist
ance
(m)
minus2
minus15
minus1
minus05
0
05
1Use EKF to estimate the X
INS onlyEKF
INS onlyEKF
INS onlyEKF
Time (s)Time (s) Time (s)0 10 15 20 25
minus10
0
10
20
30
40
50
60Use EKF to estimate the Y
10 15 20 25
Dist
ance
(m)
Dist
ance
(m)
0
05
1
15
2
25 Use EKF to estimate the Z
50 5 0 5
Figure 10 The position estimation results
system can effectively improve the navigation performanceof MAV with a significant value of engineering application
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thisworkwas supported in part by the ChinaNational Fundsfor Distinguished Young Scientists (51225504) the National973 Program (2012CB723404) the National Natural ScienceFoundation of China (91123016 61171056) the ResearchProject Supported by Shanxi Scholarship Council of China
Journal of Sensors 9
Time (s)0 10 15 20 25
Roll
angl
e (de
g)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
0
1Use EKF to estimate the roll angle
Time (s) Time (s)5 10 15 20 25
Pitc
h an
gle (
deg
)
00 50
1
2
3
4
5
6Use EKF to estimate the pitch angle
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25
Yaw
angl
e (de
g)
minus2
0
2
4
6
8
10
12Use EKF to estimate the yaw angle
5
Figure 11 The attitude estimation results
050
Distance X (m)minus05
minus1minus15
Trajectory
minus2minus200
Distance Y (m)
2040
15
1
0
2
05
25
60
Dist
ance
Z (m
)
EKFGround truthINS only
Figure 12 Trajectory comparison results between ground truth INSonly and EKF
(2015-082) and the College Funding of North University ofChina (110246)
References
[1] C Friedman I Chopra and O Rand ldquoIndooroutdoor scan-matching based mapping technique with a helicopter MAV inGPS-denied environmentrdquo International Journal of Micro AirVehicles vol 7 no 1 pp 55ndash70 2015
[2] Y Hu H L Zhang and C Tan ldquoThe effect of the aerofoilthickness on the performance of theMAV scale cycloidal rotorrdquoAeronautical Journal vol 119 pp 343ndash364 2015
[3] M Samani M Tafreshi I Shafieenejad and A A NikkhahldquoMinimum-time open-loop and closed-loop optimal guidancewith GA-PSO and neural fuzzy for Samarai MAV flightrdquo IEEEAerospace and Electronic System Magazine vol 30 pp 28ndash372015
[4] G Flores S T Zhou R Lozano and P Castillo ldquoA visionand GPS-based real-time trajectory planning for a MAV inunknown and low-sunlight environmentsrdquo Journal of Intelligentamp Robotic Systems vol 74 no 1-2 pp 59ndash67 2014
[5] A Ali and N El-Sheimy ldquoLow-cost MEMS-based pedestriannavigation technique for GPS-denied areasrdquo Journal of Sensorsvol 2013 Article ID 197090 10 pages 2013
[6] X Chen C Shen W-B Zhang M Tomizuka Y Xu andK Chiu ldquoNovel hybrid of strong tracking Kalman filter andwavelet neural network for GPSINS during GPS outagesrdquoMeasurement vol 46 no 10 pp 3847ndash3854 2013
[7] T Zhang and X S Xu ldquoA new method of seamless landnavigation for GPSINS integrated systemrdquo Measurement vol45 no 4 pp 691ndash701 2012
[8] R Song X Y Chen C Shen and H Zhang ldquoModelingFOG drift using back-propagation neural network optimizedby artificial fish swarm algorithmrdquo Journal of Sensors vol 2014Article ID 273043 6 pages 2014
[9] H Q Huang X Y Chen Z K Zhou Y Xu and C P Lv ldquoStudyof the algorithm of backtracking decoupling and adaptiveextended kalman filter based on the quaternion expanded to thestate variable for underwater glider navigationrdquo Sensors vol 14no 12 pp 23041ndash23066 2014
[10] D H Yi T H Lee and D I Cho ldquoAfocal optical flow sensor forreducing vertical height sensitivity in indoor robot localizationand navigationrdquo Sensors vol 15 no 5 pp 11208ndash11221 2015
10 Journal of Sensors
[11] H Chao Y Gu and M Napolitano ldquoA survey of optical flowtechniques for UAV navigation applicationsrdquo in Proceedingsof the International Conference on Unmanned Aircraft Systems(ICUAS rsquo13) pp 710ndash716 IEEE Atlanta Ga USA May 2013
[12] F Martınez A Manzanera and E Romero ldquoAutomatic analysisand characterization of the hummingbird wings motion usingdense optical flow featuresrdquo Bioinspiration amp Biomimetics vol10 no 1 Article ID 016006 2015
[13] M P Rodriguez and A Nygren ldquoMotion estimation in cardiacfluorescence imaging with scale-space landmarks and opticalflow a comparative studyrdquo IEEE Transactions on BiomedicalEngineering vol 62 no 2 pp 774ndash782 2015
[14] W D Ding J LWang S L Han et al ldquoAdding optical flow intothe GPSINS integration for UAV navigationrdquo in Proceedings ofthe International Global Navigation Satellite Systems Society pp1ndash13 Surfers Paradise Australia 2009
[15] D AMercado G Flores P Castillo J Escareno and R LozanoldquoGPSINSOptic flow data fusion for position and velocityestimationrdquo in Proceedings of the International Conference onUnmanned Aircraft Systems (ICUAS rsquo13) pp 486ndash491 AtlantaGa USA May 2013
[16] M B Rhudy H Y Chao and Y Gu ldquoWide-field opticalflow aided inertial navigation for unmanned aerial vehiclesrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo14) pp 674ndash679 IEEEChicago Ill USA September 2014
[17] K Gageik M Strohmeier and S Montenegro ldquoAn autonomousUAV with an optical flow sensor for positioning and naviga-tionrdquo International Journal of Advanced Robotic Systems vol 10pp 1ndash9 2013
[18] D Honegger L Meier P Tanskanen and M Pollefeys ldquoAnopen source and open hardware embedded metric opticalflow CMOS camera for indoor and outdoor applicationsrdquo inProceedings of the IEEE International Conference on Roboticsand Automation (ICRA rsquo13) pp 1736ndash1741 Karlsruhe GermanyMay 2013
[19] H-D Zhao H-S Cao J-Z Zhu and H-S Zhang ldquoMethodof attitude measurement with magnetometer and gyroscoperdquoJournal of North University of China vol 31 no 6 pp 631ndash6352010 (Chinese)
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Journal of Sensors
accelerometers of directions 119909 and 119910 due to the gravitationalacceleration perpendicular to horizontal plane Therefore itcan be concluded that
[
[
[
[
119886119909119887
119886119910119887
119886119911119887
]
]
]
]
=[
[
[
cos 120574 sin 120574 sin 120579 minus sin 120574 cos 1205790 cos 120579 sin 120579
sin 120574 minus cos 120574 sin 120579 cos 120574 cos 120579
]
]
]
[
[
[
0
0
minus119892
]
]
]
(14)
The roll and pitch can be calculated
120579 = arcsin(minus119886119910119887
119892
)
120574 = arctan(minus119886119909119887
119886119911119887
)
(15)
Thismethod uses the projection information of the earthrsquosgravitational acceleration in carrier coordinate system toreflect the attitude information of the vehicle so the above
equations are correct only under the condition that there isno acceleration of the vehicle Actually the vehicles are notalways of static or uniform motion and the measured valuesof accelerometer are not equal to the component of gravita-tional acceleration under MAV coordinate system anymoreonce the carrier is under accelerated motion Therefore thismethod only can be used for measurement in static state andit is necessary to find another attitude measuring method fordynamic conditions
232 The Heading Obtained by Magnetometer The com-ponent of earthrsquos magnetic field intensity under geographiccoordinate system is Hn = [119867119909
119899
119867119910119899
119867119911119899
]
119879 The magne-tometers are fixed on the carrier and the coordinate of themagnetometers is the same as the carrier coordinate system119865119887 and the component of magnetic field intensity under thecarrier coordinate system is Hb = [119867119909
119887
119867119910119887
119867119911119887
]
119879 Theprojection of magnetic field intensity to the geographic andcamera coordinate systems can be presented as
[
[
[
[
119867119909119899
119867119910119899
119867119911119899
]
]
]
]
=[
[
[
cos 120574 cos120593 minus sin 120574 sin 120579 sin120593 minus cos 120579 sin120593 sin 120574 cos120593 + cos 120574 sin 120579 sin120593cos 120574 sin120593 + sin 120574 sin 120579 cos120593 cos 120579 cos120593 sin 120574 sin120593 minus cos 120574 sin 120579 cos120593
minus sin 120574 cos 120579 sin 120579 cos 120574 cos 120579
]
]
]
[
[
[
[
119867119909119887
119867119910119887
119867119911119887
]
]
]
]
(16)
where [119867119909119899
119867119910119899
119867119911119899
]
119879 can be referred to by [19] InTaiyuan area (northern latitude 378∘ east longitude1125∘) [119867119909
119899
119867119910119899
119867119911119899
]
119879 is shown as (17) and the data of[119867119909119887
119867119910119887
119867119911119887
]
119879 can be obtained from the magnetometer
119867119909119899
= minus0216 times 10minus5119879
119867119910119899
= 0309 times 10minus4119879
119867119911119899
= minus043 times 10minus4119879
(17)
Supposing that themagnetic field intensity keeps on beingconstant during the flight ofMAV the heading ofMAVundergeographic coordinate system can be calculated by (16) and(17) based on the roll and pitch provided by accelerometer
3 Data Fusion Based on EKF
31 Optical Flow SensorAccelerometer Integrated System forVelocity and Position Measurements In our study the EKFfilter is employed to fuse the accelerometer and optical flowsensorThe velocity and position calculated by accelerometerunder navigation coordinates are selected as the state valueand the velocity and position calculated by optical flow sensorare selected as the observer value The estimation process isshown in Figure 3
Considering the nonlinear system state equation andobserved equation
X119896+1 = 119891 [X119896 119896] + B119896U119896 + Γ119896W119896
Z119896+1 = ℎ [X119896+1 119896 + 1] + V119896+1(18)
where X119896 = [119883119899 119884119899 119885119899 119881119909119899
119881119910119899
119881119911119899
]
119879 is state vectorwhich includes the velocity information and position infor-mation of MAV Z119896 = [119909 119910 119885119888]
119879 is observer vector whichincludes the optical flow data of directions 119909 and 119910 fromoptical flow sensor and the data 119885119888 obtained from ultrasonicsensors U119896 = [0 0 0 119886119909
119899
119886119910119899
119886119911119899
]
119879 is the control vector ofsystem that can be obtained by the accelerometer data aftercoordinate matrix transformation B119896 is matrix of controlallocation Γ119896 is matrix of noise allocation W119896 is matrix ofprocess noise V119896 is observer noise 119891 represents the systemstate function ℎ represents the observation function
Substituting the state and observed equation into EKF thetime renewal equation is
X119896+1119896 = 119891 [X119896 119896] + B119896U119896
P119896+1119896 = Φ119896+1119896P119896Φ119879
119896+1119896+ Γ119896Q119896Γ
119879
119896
(19)
Journal of Sensors 5
Acc
Opticalflow
Sonar
Gyro
EKF
Position
Velocity
Zc
(Xn Yn Zn)
(Vx Vy Vz)
(ax ay az)
(120596x 120596y 120596z)
(x y)
Figure 3 Optical flow sensoraccelerometer integrated system
Acc
Magneto-meter
Gyro
ExtendedKalman
filter
Altitude
Gauss-Newtonmethod
4th-order Runge-Kutta
q(m)
q
q(i)
H
120596
a
(120601 120579 120574)
Figure 4 Gyroscopeaccelerometermagnetometer integrated sys-tem
Measurement renewal equation is
K119896+1 = P119896+1119896H119896+1 (H119896+1P119896+1119896H119879
119896+1+ R119896+1)
minus1
X119896+1 = X119896+1119896 + K119896+1 Z119896+1 minus ℎ [X119896+1119896 119896 + 1]
P119896+1 = (I minus K119896+1H119896+1)P119896+1119896 (I minus K119896+1H119896+1)minus1
+ K119896+1R119896+1K119879
119896+1
(20)
where Φ119896+1119896 = (120597119891[X119896 119896]120597X119879119896 )|X119896=X119896
and H119896+1119896 =
(120597ℎ[X119896+1 119896 + 1]120597X119879119896+1)|X119896+1=X119896+1119896
From the process of EKF mentioned above the data for
position and velocity of MAV can be obtained in geographiccoordinate system
32 GyroscopeAccelerometerMagnetometer Integrated Sys-tem Based on EKF The attitude of MAV can be obtainedthrough the integration of the angular rate from gyroscopeoutput signal however the performance ofMEMS gyroscopewould be influenced by drift The integrated accelerome-termagnetometer system can provide attitude informationwithout drift therefore it is necessary to fuse the data ofmultisensors by using EKF The filtering process is shownas Figure 4 the system state vector can be expressed asX119896 = [1199020 1199021 1199022 1199023 120596119909 120596119910 120596119911]
119879 where [1199020 1199021 1199022 1199023]119879 is
quaternion of the system state it can be calculated by fourth-order Runge-Kutta method [120596119909 120596119910 120596119911]
119879 is the output ofgyroscope
The system observation vector can be expressed as Z119896 =[1199020 1199021 1199022 1199023]
119879 which can be calculated by Gauss-Newtonmethod based on the data of accelerometer and magnetome-ter
33 Optical Flow SensorINSMagnetometer Integrated Navi-gation Scheme The effective estimation of MAV velocity andposition can be obtained by using optical flow sensorINSintegrated navigation system based on EKF no matter understationary status or motion status According to the char-acteristics of attitude measurements by using gyroscopeand accelerometermagnetometer accelerometer and mag-netometer are integrated to calibrate the gyroscope duringstationary or uniform motion state when the motion stateis detected as accelerating or decelerating the standalonegyroscopes are used to obtain the attitude by strap-downcalculatingThemotion state is detected by optic flow sensorThe overall navigation scheme is shown in Figure 5
4 Experiments and Verification
In order to verify the proposed optical flow sensorINSmagnetometer integrated navigation system a MAV flightexperiment was carried out The experiment location was inthe stadium of North University of China Taiyuan As shownin Figure 6 we can see that during the flight procedure theMAV kept flying to the north The flying distance was 50meters and the flight height is 15 meters
41 Experiments Platform As shown in Figures 7 and 8 theautonomous MAV is used as flight platform (Figure 7(a))STM32F103Z is selected as the flight control proces-sor (Figure 7(b)) the optical flow sensor is produced by3D Robtics Corporation which is named as PX4FLOW(Figure 7(c)) the IMU is MPU6050 (Figure 7(d)) the mag-netometer is HMC3883L which is produced by HoneywellLimited (Figure 7(d)) DJ1 2312 which is produced by DJI isselected as the MAVmotor (Figure 7(e)) and HC-12 wirelessserial interface module (Figure 7(f)) is used to transmit thesensorrsquos data fromMAV to PC
42 Verification Results Figures 9ndash11 are the velocity estima-tion results position estimation results and attitude estima-tion results respectively Table 1 is the end position compari-son results between INS only and OFSINSmagnetometer Itcan be concluded that (1) in the process of velocity estimationand position estimation the OFSINSmagnetometer basedon EKF can decrease the drift of INS effectively For examplefrom Figure 9 we can see that the position drift is about 8meters after 50 meters trajectory without the correction ofOFS and magnetometer and the position drift is decreasedto less than 1 meter after using the integrated algorithmand (2) in the process of attitude estimation the roll anglepitch angle and the yaw angle can be effectively tracked byOFSINSmagnetometer based on EKF during static and uni-form velocity status And after nonuniform velocity motionthe attitude can be corrected immediately
6 Journal of Sensors
Table 1 Comparison results between INS only and OFSINSmagnetometer at the end position
Ground truth position at the end INS only OFSINSmagnetometerDirections Ground truth value Measurements Error Estimation Error119883 0 minus187 mdash 025 mdash119884 50 578 156 509 18119885 0 078 mdash 014 mdash
Start
Read the output ofoptical flow sensor
Stationary state oruniform motion
Attitude determination by
Output the attitude andupdate the transfer matrix
Velocity and position determinationby optical flow sensorINS
Attitude determinationby stand-alone gyro
gyroaccmagnetometer
Figure 5 The flow chart of optical flow sensorINSmagnetometer integrated navigation system
N
E
Start
End
Figure 6 The experiment trajectory
Journal of Sensors 7
(b)
(c)
(d)(e)(f)
(a)
Figure 7 The hardware experiment platform
HC12MPU6050 PX4FLOW
Figure 8 The INSOFSmagnetometer integrated navigation system
Figure 12 is the trajectory comparison results betweenground truth INS only and EKF It can be concluded that theproposed optical flow sensorINSmagnetometer integratednavigation system can provide a higher accurate navigationresult compared to INS only navigation system
5 Conclusion
In this paper an optical flow sensorINSmagnetometerintegrated navigation system is proposed for MAV The
proposed method which is based on EKF combines opticalflow sensor INS and magnetometer information to estimatethe attitude velocity and position of MAV Specifically thegyro accelerator and magnetometer information are fusedtogether to estimate theMAV attitude when theMAV is staticor uniformlymoving and the gyro only is used to estimate theMAV attitude when the MAV is accelerating or deceleratingExperiment results show that the proposed method whichcan significantly reduce the errors for navigation positionvelocity and attitude compared with the INS only navigation
8 Journal of Sensors
Time (s) Time (s) Time (s)0 10 15 20 25
Velo
city
(ms
)
Velo
city
(ms
)
Velo
city
(ms
)
minus02
0
02
04
06
08
1
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25minus05
0
05
1
15
2
25
3
35
4
10 15 20 25minus08
minus06
minus04
minus02
0
02
04
06
08
1Use EKF to estimate the VzUse EKF to estimate the VyUse EKF to estimate the Vx
5 0 5 0 5
Figure 9 The velocity estimation results
10 15 20 25
Dist
ance
(m)
minus2
minus15
minus1
minus05
0
05
1Use EKF to estimate the X
INS onlyEKF
INS onlyEKF
INS onlyEKF
Time (s)Time (s) Time (s)0 10 15 20 25
minus10
0
10
20
30
40
50
60Use EKF to estimate the Y
10 15 20 25
Dist
ance
(m)
Dist
ance
(m)
0
05
1
15
2
25 Use EKF to estimate the Z
50 5 0 5
Figure 10 The position estimation results
system can effectively improve the navigation performanceof MAV with a significant value of engineering application
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thisworkwas supported in part by the ChinaNational Fundsfor Distinguished Young Scientists (51225504) the National973 Program (2012CB723404) the National Natural ScienceFoundation of China (91123016 61171056) the ResearchProject Supported by Shanxi Scholarship Council of China
Journal of Sensors 9
Time (s)0 10 15 20 25
Roll
angl
e (de
g)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
0
1Use EKF to estimate the roll angle
Time (s) Time (s)5 10 15 20 25
Pitc
h an
gle (
deg
)
00 50
1
2
3
4
5
6Use EKF to estimate the pitch angle
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25
Yaw
angl
e (de
g)
minus2
0
2
4
6
8
10
12Use EKF to estimate the yaw angle
5
Figure 11 The attitude estimation results
050
Distance X (m)minus05
minus1minus15
Trajectory
minus2minus200
Distance Y (m)
2040
15
1
0
2
05
25
60
Dist
ance
Z (m
)
EKFGround truthINS only
Figure 12 Trajectory comparison results between ground truth INSonly and EKF
(2015-082) and the College Funding of North University ofChina (110246)
References
[1] C Friedman I Chopra and O Rand ldquoIndooroutdoor scan-matching based mapping technique with a helicopter MAV inGPS-denied environmentrdquo International Journal of Micro AirVehicles vol 7 no 1 pp 55ndash70 2015
[2] Y Hu H L Zhang and C Tan ldquoThe effect of the aerofoilthickness on the performance of theMAV scale cycloidal rotorrdquoAeronautical Journal vol 119 pp 343ndash364 2015
[3] M Samani M Tafreshi I Shafieenejad and A A NikkhahldquoMinimum-time open-loop and closed-loop optimal guidancewith GA-PSO and neural fuzzy for Samarai MAV flightrdquo IEEEAerospace and Electronic System Magazine vol 30 pp 28ndash372015
[4] G Flores S T Zhou R Lozano and P Castillo ldquoA visionand GPS-based real-time trajectory planning for a MAV inunknown and low-sunlight environmentsrdquo Journal of Intelligentamp Robotic Systems vol 74 no 1-2 pp 59ndash67 2014
[5] A Ali and N El-Sheimy ldquoLow-cost MEMS-based pedestriannavigation technique for GPS-denied areasrdquo Journal of Sensorsvol 2013 Article ID 197090 10 pages 2013
[6] X Chen C Shen W-B Zhang M Tomizuka Y Xu andK Chiu ldquoNovel hybrid of strong tracking Kalman filter andwavelet neural network for GPSINS during GPS outagesrdquoMeasurement vol 46 no 10 pp 3847ndash3854 2013
[7] T Zhang and X S Xu ldquoA new method of seamless landnavigation for GPSINS integrated systemrdquo Measurement vol45 no 4 pp 691ndash701 2012
[8] R Song X Y Chen C Shen and H Zhang ldquoModelingFOG drift using back-propagation neural network optimizedby artificial fish swarm algorithmrdquo Journal of Sensors vol 2014Article ID 273043 6 pages 2014
[9] H Q Huang X Y Chen Z K Zhou Y Xu and C P Lv ldquoStudyof the algorithm of backtracking decoupling and adaptiveextended kalman filter based on the quaternion expanded to thestate variable for underwater glider navigationrdquo Sensors vol 14no 12 pp 23041ndash23066 2014
[10] D H Yi T H Lee and D I Cho ldquoAfocal optical flow sensor forreducing vertical height sensitivity in indoor robot localizationand navigationrdquo Sensors vol 15 no 5 pp 11208ndash11221 2015
10 Journal of Sensors
[11] H Chao Y Gu and M Napolitano ldquoA survey of optical flowtechniques for UAV navigation applicationsrdquo in Proceedingsof the International Conference on Unmanned Aircraft Systems(ICUAS rsquo13) pp 710ndash716 IEEE Atlanta Ga USA May 2013
[12] F Martınez A Manzanera and E Romero ldquoAutomatic analysisand characterization of the hummingbird wings motion usingdense optical flow featuresrdquo Bioinspiration amp Biomimetics vol10 no 1 Article ID 016006 2015
[13] M P Rodriguez and A Nygren ldquoMotion estimation in cardiacfluorescence imaging with scale-space landmarks and opticalflow a comparative studyrdquo IEEE Transactions on BiomedicalEngineering vol 62 no 2 pp 774ndash782 2015
[14] W D Ding J LWang S L Han et al ldquoAdding optical flow intothe GPSINS integration for UAV navigationrdquo in Proceedings ofthe International Global Navigation Satellite Systems Society pp1ndash13 Surfers Paradise Australia 2009
[15] D AMercado G Flores P Castillo J Escareno and R LozanoldquoGPSINSOptic flow data fusion for position and velocityestimationrdquo in Proceedings of the International Conference onUnmanned Aircraft Systems (ICUAS rsquo13) pp 486ndash491 AtlantaGa USA May 2013
[16] M B Rhudy H Y Chao and Y Gu ldquoWide-field opticalflow aided inertial navigation for unmanned aerial vehiclesrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo14) pp 674ndash679 IEEEChicago Ill USA September 2014
[17] K Gageik M Strohmeier and S Montenegro ldquoAn autonomousUAV with an optical flow sensor for positioning and naviga-tionrdquo International Journal of Advanced Robotic Systems vol 10pp 1ndash9 2013
[18] D Honegger L Meier P Tanskanen and M Pollefeys ldquoAnopen source and open hardware embedded metric opticalflow CMOS camera for indoor and outdoor applicationsrdquo inProceedings of the IEEE International Conference on Roboticsand Automation (ICRA rsquo13) pp 1736ndash1741 Karlsruhe GermanyMay 2013
[19] H-D Zhao H-S Cao J-Z Zhu and H-S Zhang ldquoMethodof attitude measurement with magnetometer and gyroscoperdquoJournal of North University of China vol 31 no 6 pp 631ndash6352010 (Chinese)
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Sensors 5
Acc
Opticalflow
Sonar
Gyro
EKF
Position
Velocity
Zc
(Xn Yn Zn)
(Vx Vy Vz)
(ax ay az)
(120596x 120596y 120596z)
(x y)
Figure 3 Optical flow sensoraccelerometer integrated system
Acc
Magneto-meter
Gyro
ExtendedKalman
filter
Altitude
Gauss-Newtonmethod
4th-order Runge-Kutta
q(m)
q
q(i)
H
120596
a
(120601 120579 120574)
Figure 4 Gyroscopeaccelerometermagnetometer integrated sys-tem
Measurement renewal equation is
K119896+1 = P119896+1119896H119896+1 (H119896+1P119896+1119896H119879
119896+1+ R119896+1)
minus1
X119896+1 = X119896+1119896 + K119896+1 Z119896+1 minus ℎ [X119896+1119896 119896 + 1]
P119896+1 = (I minus K119896+1H119896+1)P119896+1119896 (I minus K119896+1H119896+1)minus1
+ K119896+1R119896+1K119879
119896+1
(20)
where Φ119896+1119896 = (120597119891[X119896 119896]120597X119879119896 )|X119896=X119896
and H119896+1119896 =
(120597ℎ[X119896+1 119896 + 1]120597X119879119896+1)|X119896+1=X119896+1119896
From the process of EKF mentioned above the data for
position and velocity of MAV can be obtained in geographiccoordinate system
32 GyroscopeAccelerometerMagnetometer Integrated Sys-tem Based on EKF The attitude of MAV can be obtainedthrough the integration of the angular rate from gyroscopeoutput signal however the performance ofMEMS gyroscopewould be influenced by drift The integrated accelerome-termagnetometer system can provide attitude informationwithout drift therefore it is necessary to fuse the data ofmultisensors by using EKF The filtering process is shownas Figure 4 the system state vector can be expressed asX119896 = [1199020 1199021 1199022 1199023 120596119909 120596119910 120596119911]
119879 where [1199020 1199021 1199022 1199023]119879 is
quaternion of the system state it can be calculated by fourth-order Runge-Kutta method [120596119909 120596119910 120596119911]
119879 is the output ofgyroscope
The system observation vector can be expressed as Z119896 =[1199020 1199021 1199022 1199023]
119879 which can be calculated by Gauss-Newtonmethod based on the data of accelerometer and magnetome-ter
33 Optical Flow SensorINSMagnetometer Integrated Navi-gation Scheme The effective estimation of MAV velocity andposition can be obtained by using optical flow sensorINSintegrated navigation system based on EKF no matter understationary status or motion status According to the char-acteristics of attitude measurements by using gyroscopeand accelerometermagnetometer accelerometer and mag-netometer are integrated to calibrate the gyroscope duringstationary or uniform motion state when the motion stateis detected as accelerating or decelerating the standalonegyroscopes are used to obtain the attitude by strap-downcalculatingThemotion state is detected by optic flow sensorThe overall navigation scheme is shown in Figure 5
4 Experiments and Verification
In order to verify the proposed optical flow sensorINSmagnetometer integrated navigation system a MAV flightexperiment was carried out The experiment location was inthe stadium of North University of China Taiyuan As shownin Figure 6 we can see that during the flight procedure theMAV kept flying to the north The flying distance was 50meters and the flight height is 15 meters
41 Experiments Platform As shown in Figures 7 and 8 theautonomous MAV is used as flight platform (Figure 7(a))STM32F103Z is selected as the flight control proces-sor (Figure 7(b)) the optical flow sensor is produced by3D Robtics Corporation which is named as PX4FLOW(Figure 7(c)) the IMU is MPU6050 (Figure 7(d)) the mag-netometer is HMC3883L which is produced by HoneywellLimited (Figure 7(d)) DJ1 2312 which is produced by DJI isselected as the MAVmotor (Figure 7(e)) and HC-12 wirelessserial interface module (Figure 7(f)) is used to transmit thesensorrsquos data fromMAV to PC
42 Verification Results Figures 9ndash11 are the velocity estima-tion results position estimation results and attitude estima-tion results respectively Table 1 is the end position compari-son results between INS only and OFSINSmagnetometer Itcan be concluded that (1) in the process of velocity estimationand position estimation the OFSINSmagnetometer basedon EKF can decrease the drift of INS effectively For examplefrom Figure 9 we can see that the position drift is about 8meters after 50 meters trajectory without the correction ofOFS and magnetometer and the position drift is decreasedto less than 1 meter after using the integrated algorithmand (2) in the process of attitude estimation the roll anglepitch angle and the yaw angle can be effectively tracked byOFSINSmagnetometer based on EKF during static and uni-form velocity status And after nonuniform velocity motionthe attitude can be corrected immediately
6 Journal of Sensors
Table 1 Comparison results between INS only and OFSINSmagnetometer at the end position
Ground truth position at the end INS only OFSINSmagnetometerDirections Ground truth value Measurements Error Estimation Error119883 0 minus187 mdash 025 mdash119884 50 578 156 509 18119885 0 078 mdash 014 mdash
Start
Read the output ofoptical flow sensor
Stationary state oruniform motion
Attitude determination by
Output the attitude andupdate the transfer matrix
Velocity and position determinationby optical flow sensorINS
Attitude determinationby stand-alone gyro
gyroaccmagnetometer
Figure 5 The flow chart of optical flow sensorINSmagnetometer integrated navigation system
N
E
Start
End
Figure 6 The experiment trajectory
Journal of Sensors 7
(b)
(c)
(d)(e)(f)
(a)
Figure 7 The hardware experiment platform
HC12MPU6050 PX4FLOW
Figure 8 The INSOFSmagnetometer integrated navigation system
Figure 12 is the trajectory comparison results betweenground truth INS only and EKF It can be concluded that theproposed optical flow sensorINSmagnetometer integratednavigation system can provide a higher accurate navigationresult compared to INS only navigation system
5 Conclusion
In this paper an optical flow sensorINSmagnetometerintegrated navigation system is proposed for MAV The
proposed method which is based on EKF combines opticalflow sensor INS and magnetometer information to estimatethe attitude velocity and position of MAV Specifically thegyro accelerator and magnetometer information are fusedtogether to estimate theMAV attitude when theMAV is staticor uniformlymoving and the gyro only is used to estimate theMAV attitude when the MAV is accelerating or deceleratingExperiment results show that the proposed method whichcan significantly reduce the errors for navigation positionvelocity and attitude compared with the INS only navigation
8 Journal of Sensors
Time (s) Time (s) Time (s)0 10 15 20 25
Velo
city
(ms
)
Velo
city
(ms
)
Velo
city
(ms
)
minus02
0
02
04
06
08
1
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25minus05
0
05
1
15
2
25
3
35
4
10 15 20 25minus08
minus06
minus04
minus02
0
02
04
06
08
1Use EKF to estimate the VzUse EKF to estimate the VyUse EKF to estimate the Vx
5 0 5 0 5
Figure 9 The velocity estimation results
10 15 20 25
Dist
ance
(m)
minus2
minus15
minus1
minus05
0
05
1Use EKF to estimate the X
INS onlyEKF
INS onlyEKF
INS onlyEKF
Time (s)Time (s) Time (s)0 10 15 20 25
minus10
0
10
20
30
40
50
60Use EKF to estimate the Y
10 15 20 25
Dist
ance
(m)
Dist
ance
(m)
0
05
1
15
2
25 Use EKF to estimate the Z
50 5 0 5
Figure 10 The position estimation results
system can effectively improve the navigation performanceof MAV with a significant value of engineering application
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thisworkwas supported in part by the ChinaNational Fundsfor Distinguished Young Scientists (51225504) the National973 Program (2012CB723404) the National Natural ScienceFoundation of China (91123016 61171056) the ResearchProject Supported by Shanxi Scholarship Council of China
Journal of Sensors 9
Time (s)0 10 15 20 25
Roll
angl
e (de
g)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
0
1Use EKF to estimate the roll angle
Time (s) Time (s)5 10 15 20 25
Pitc
h an
gle (
deg
)
00 50
1
2
3
4
5
6Use EKF to estimate the pitch angle
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25
Yaw
angl
e (de
g)
minus2
0
2
4
6
8
10
12Use EKF to estimate the yaw angle
5
Figure 11 The attitude estimation results
050
Distance X (m)minus05
minus1minus15
Trajectory
minus2minus200
Distance Y (m)
2040
15
1
0
2
05
25
60
Dist
ance
Z (m
)
EKFGround truthINS only
Figure 12 Trajectory comparison results between ground truth INSonly and EKF
(2015-082) and the College Funding of North University ofChina (110246)
References
[1] C Friedman I Chopra and O Rand ldquoIndooroutdoor scan-matching based mapping technique with a helicopter MAV inGPS-denied environmentrdquo International Journal of Micro AirVehicles vol 7 no 1 pp 55ndash70 2015
[2] Y Hu H L Zhang and C Tan ldquoThe effect of the aerofoilthickness on the performance of theMAV scale cycloidal rotorrdquoAeronautical Journal vol 119 pp 343ndash364 2015
[3] M Samani M Tafreshi I Shafieenejad and A A NikkhahldquoMinimum-time open-loop and closed-loop optimal guidancewith GA-PSO and neural fuzzy for Samarai MAV flightrdquo IEEEAerospace and Electronic System Magazine vol 30 pp 28ndash372015
[4] G Flores S T Zhou R Lozano and P Castillo ldquoA visionand GPS-based real-time trajectory planning for a MAV inunknown and low-sunlight environmentsrdquo Journal of Intelligentamp Robotic Systems vol 74 no 1-2 pp 59ndash67 2014
[5] A Ali and N El-Sheimy ldquoLow-cost MEMS-based pedestriannavigation technique for GPS-denied areasrdquo Journal of Sensorsvol 2013 Article ID 197090 10 pages 2013
[6] X Chen C Shen W-B Zhang M Tomizuka Y Xu andK Chiu ldquoNovel hybrid of strong tracking Kalman filter andwavelet neural network for GPSINS during GPS outagesrdquoMeasurement vol 46 no 10 pp 3847ndash3854 2013
[7] T Zhang and X S Xu ldquoA new method of seamless landnavigation for GPSINS integrated systemrdquo Measurement vol45 no 4 pp 691ndash701 2012
[8] R Song X Y Chen C Shen and H Zhang ldquoModelingFOG drift using back-propagation neural network optimizedby artificial fish swarm algorithmrdquo Journal of Sensors vol 2014Article ID 273043 6 pages 2014
[9] H Q Huang X Y Chen Z K Zhou Y Xu and C P Lv ldquoStudyof the algorithm of backtracking decoupling and adaptiveextended kalman filter based on the quaternion expanded to thestate variable for underwater glider navigationrdquo Sensors vol 14no 12 pp 23041ndash23066 2014
[10] D H Yi T H Lee and D I Cho ldquoAfocal optical flow sensor forreducing vertical height sensitivity in indoor robot localizationand navigationrdquo Sensors vol 15 no 5 pp 11208ndash11221 2015
10 Journal of Sensors
[11] H Chao Y Gu and M Napolitano ldquoA survey of optical flowtechniques for UAV navigation applicationsrdquo in Proceedingsof the International Conference on Unmanned Aircraft Systems(ICUAS rsquo13) pp 710ndash716 IEEE Atlanta Ga USA May 2013
[12] F Martınez A Manzanera and E Romero ldquoAutomatic analysisand characterization of the hummingbird wings motion usingdense optical flow featuresrdquo Bioinspiration amp Biomimetics vol10 no 1 Article ID 016006 2015
[13] M P Rodriguez and A Nygren ldquoMotion estimation in cardiacfluorescence imaging with scale-space landmarks and opticalflow a comparative studyrdquo IEEE Transactions on BiomedicalEngineering vol 62 no 2 pp 774ndash782 2015
[14] W D Ding J LWang S L Han et al ldquoAdding optical flow intothe GPSINS integration for UAV navigationrdquo in Proceedings ofthe International Global Navigation Satellite Systems Society pp1ndash13 Surfers Paradise Australia 2009
[15] D AMercado G Flores P Castillo J Escareno and R LozanoldquoGPSINSOptic flow data fusion for position and velocityestimationrdquo in Proceedings of the International Conference onUnmanned Aircraft Systems (ICUAS rsquo13) pp 486ndash491 AtlantaGa USA May 2013
[16] M B Rhudy H Y Chao and Y Gu ldquoWide-field opticalflow aided inertial navigation for unmanned aerial vehiclesrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo14) pp 674ndash679 IEEEChicago Ill USA September 2014
[17] K Gageik M Strohmeier and S Montenegro ldquoAn autonomousUAV with an optical flow sensor for positioning and naviga-tionrdquo International Journal of Advanced Robotic Systems vol 10pp 1ndash9 2013
[18] D Honegger L Meier P Tanskanen and M Pollefeys ldquoAnopen source and open hardware embedded metric opticalflow CMOS camera for indoor and outdoor applicationsrdquo inProceedings of the IEEE International Conference on Roboticsand Automation (ICRA rsquo13) pp 1736ndash1741 Karlsruhe GermanyMay 2013
[19] H-D Zhao H-S Cao J-Z Zhu and H-S Zhang ldquoMethodof attitude measurement with magnetometer and gyroscoperdquoJournal of North University of China vol 31 no 6 pp 631ndash6352010 (Chinese)
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Journal of Sensors
Table 1 Comparison results between INS only and OFSINSmagnetometer at the end position
Ground truth position at the end INS only OFSINSmagnetometerDirections Ground truth value Measurements Error Estimation Error119883 0 minus187 mdash 025 mdash119884 50 578 156 509 18119885 0 078 mdash 014 mdash
Start
Read the output ofoptical flow sensor
Stationary state oruniform motion
Attitude determination by
Output the attitude andupdate the transfer matrix
Velocity and position determinationby optical flow sensorINS
Attitude determinationby stand-alone gyro
gyroaccmagnetometer
Figure 5 The flow chart of optical flow sensorINSmagnetometer integrated navigation system
N
E
Start
End
Figure 6 The experiment trajectory
Journal of Sensors 7
(b)
(c)
(d)(e)(f)
(a)
Figure 7 The hardware experiment platform
HC12MPU6050 PX4FLOW
Figure 8 The INSOFSmagnetometer integrated navigation system
Figure 12 is the trajectory comparison results betweenground truth INS only and EKF It can be concluded that theproposed optical flow sensorINSmagnetometer integratednavigation system can provide a higher accurate navigationresult compared to INS only navigation system
5 Conclusion
In this paper an optical flow sensorINSmagnetometerintegrated navigation system is proposed for MAV The
proposed method which is based on EKF combines opticalflow sensor INS and magnetometer information to estimatethe attitude velocity and position of MAV Specifically thegyro accelerator and magnetometer information are fusedtogether to estimate theMAV attitude when theMAV is staticor uniformlymoving and the gyro only is used to estimate theMAV attitude when the MAV is accelerating or deceleratingExperiment results show that the proposed method whichcan significantly reduce the errors for navigation positionvelocity and attitude compared with the INS only navigation
8 Journal of Sensors
Time (s) Time (s) Time (s)0 10 15 20 25
Velo
city
(ms
)
Velo
city
(ms
)
Velo
city
(ms
)
minus02
0
02
04
06
08
1
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25minus05
0
05
1
15
2
25
3
35
4
10 15 20 25minus08
minus06
minus04
minus02
0
02
04
06
08
1Use EKF to estimate the VzUse EKF to estimate the VyUse EKF to estimate the Vx
5 0 5 0 5
Figure 9 The velocity estimation results
10 15 20 25
Dist
ance
(m)
minus2
minus15
minus1
minus05
0
05
1Use EKF to estimate the X
INS onlyEKF
INS onlyEKF
INS onlyEKF
Time (s)Time (s) Time (s)0 10 15 20 25
minus10
0
10
20
30
40
50
60Use EKF to estimate the Y
10 15 20 25
Dist
ance
(m)
Dist
ance
(m)
0
05
1
15
2
25 Use EKF to estimate the Z
50 5 0 5
Figure 10 The position estimation results
system can effectively improve the navigation performanceof MAV with a significant value of engineering application
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thisworkwas supported in part by the ChinaNational Fundsfor Distinguished Young Scientists (51225504) the National973 Program (2012CB723404) the National Natural ScienceFoundation of China (91123016 61171056) the ResearchProject Supported by Shanxi Scholarship Council of China
Journal of Sensors 9
Time (s)0 10 15 20 25
Roll
angl
e (de
g)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
0
1Use EKF to estimate the roll angle
Time (s) Time (s)5 10 15 20 25
Pitc
h an
gle (
deg
)
00 50
1
2
3
4
5
6Use EKF to estimate the pitch angle
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25
Yaw
angl
e (de
g)
minus2
0
2
4
6
8
10
12Use EKF to estimate the yaw angle
5
Figure 11 The attitude estimation results
050
Distance X (m)minus05
minus1minus15
Trajectory
minus2minus200
Distance Y (m)
2040
15
1
0
2
05
25
60
Dist
ance
Z (m
)
EKFGround truthINS only
Figure 12 Trajectory comparison results between ground truth INSonly and EKF
(2015-082) and the College Funding of North University ofChina (110246)
References
[1] C Friedman I Chopra and O Rand ldquoIndooroutdoor scan-matching based mapping technique with a helicopter MAV inGPS-denied environmentrdquo International Journal of Micro AirVehicles vol 7 no 1 pp 55ndash70 2015
[2] Y Hu H L Zhang and C Tan ldquoThe effect of the aerofoilthickness on the performance of theMAV scale cycloidal rotorrdquoAeronautical Journal vol 119 pp 343ndash364 2015
[3] M Samani M Tafreshi I Shafieenejad and A A NikkhahldquoMinimum-time open-loop and closed-loop optimal guidancewith GA-PSO and neural fuzzy for Samarai MAV flightrdquo IEEEAerospace and Electronic System Magazine vol 30 pp 28ndash372015
[4] G Flores S T Zhou R Lozano and P Castillo ldquoA visionand GPS-based real-time trajectory planning for a MAV inunknown and low-sunlight environmentsrdquo Journal of Intelligentamp Robotic Systems vol 74 no 1-2 pp 59ndash67 2014
[5] A Ali and N El-Sheimy ldquoLow-cost MEMS-based pedestriannavigation technique for GPS-denied areasrdquo Journal of Sensorsvol 2013 Article ID 197090 10 pages 2013
[6] X Chen C Shen W-B Zhang M Tomizuka Y Xu andK Chiu ldquoNovel hybrid of strong tracking Kalman filter andwavelet neural network for GPSINS during GPS outagesrdquoMeasurement vol 46 no 10 pp 3847ndash3854 2013
[7] T Zhang and X S Xu ldquoA new method of seamless landnavigation for GPSINS integrated systemrdquo Measurement vol45 no 4 pp 691ndash701 2012
[8] R Song X Y Chen C Shen and H Zhang ldquoModelingFOG drift using back-propagation neural network optimizedby artificial fish swarm algorithmrdquo Journal of Sensors vol 2014Article ID 273043 6 pages 2014
[9] H Q Huang X Y Chen Z K Zhou Y Xu and C P Lv ldquoStudyof the algorithm of backtracking decoupling and adaptiveextended kalman filter based on the quaternion expanded to thestate variable for underwater glider navigationrdquo Sensors vol 14no 12 pp 23041ndash23066 2014
[10] D H Yi T H Lee and D I Cho ldquoAfocal optical flow sensor forreducing vertical height sensitivity in indoor robot localizationand navigationrdquo Sensors vol 15 no 5 pp 11208ndash11221 2015
10 Journal of Sensors
[11] H Chao Y Gu and M Napolitano ldquoA survey of optical flowtechniques for UAV navigation applicationsrdquo in Proceedingsof the International Conference on Unmanned Aircraft Systems(ICUAS rsquo13) pp 710ndash716 IEEE Atlanta Ga USA May 2013
[12] F Martınez A Manzanera and E Romero ldquoAutomatic analysisand characterization of the hummingbird wings motion usingdense optical flow featuresrdquo Bioinspiration amp Biomimetics vol10 no 1 Article ID 016006 2015
[13] M P Rodriguez and A Nygren ldquoMotion estimation in cardiacfluorescence imaging with scale-space landmarks and opticalflow a comparative studyrdquo IEEE Transactions on BiomedicalEngineering vol 62 no 2 pp 774ndash782 2015
[14] W D Ding J LWang S L Han et al ldquoAdding optical flow intothe GPSINS integration for UAV navigationrdquo in Proceedings ofthe International Global Navigation Satellite Systems Society pp1ndash13 Surfers Paradise Australia 2009
[15] D AMercado G Flores P Castillo J Escareno and R LozanoldquoGPSINSOptic flow data fusion for position and velocityestimationrdquo in Proceedings of the International Conference onUnmanned Aircraft Systems (ICUAS rsquo13) pp 486ndash491 AtlantaGa USA May 2013
[16] M B Rhudy H Y Chao and Y Gu ldquoWide-field opticalflow aided inertial navigation for unmanned aerial vehiclesrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo14) pp 674ndash679 IEEEChicago Ill USA September 2014
[17] K Gageik M Strohmeier and S Montenegro ldquoAn autonomousUAV with an optical flow sensor for positioning and naviga-tionrdquo International Journal of Advanced Robotic Systems vol 10pp 1ndash9 2013
[18] D Honegger L Meier P Tanskanen and M Pollefeys ldquoAnopen source and open hardware embedded metric opticalflow CMOS camera for indoor and outdoor applicationsrdquo inProceedings of the IEEE International Conference on Roboticsand Automation (ICRA rsquo13) pp 1736ndash1741 Karlsruhe GermanyMay 2013
[19] H-D Zhao H-S Cao J-Z Zhu and H-S Zhang ldquoMethodof attitude measurement with magnetometer and gyroscoperdquoJournal of North University of China vol 31 no 6 pp 631ndash6352010 (Chinese)
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Sensors 7
(b)
(c)
(d)(e)(f)
(a)
Figure 7 The hardware experiment platform
HC12MPU6050 PX4FLOW
Figure 8 The INSOFSmagnetometer integrated navigation system
Figure 12 is the trajectory comparison results betweenground truth INS only and EKF It can be concluded that theproposed optical flow sensorINSmagnetometer integratednavigation system can provide a higher accurate navigationresult compared to INS only navigation system
5 Conclusion
In this paper an optical flow sensorINSmagnetometerintegrated navigation system is proposed for MAV The
proposed method which is based on EKF combines opticalflow sensor INS and magnetometer information to estimatethe attitude velocity and position of MAV Specifically thegyro accelerator and magnetometer information are fusedtogether to estimate theMAV attitude when theMAV is staticor uniformlymoving and the gyro only is used to estimate theMAV attitude when the MAV is accelerating or deceleratingExperiment results show that the proposed method whichcan significantly reduce the errors for navigation positionvelocity and attitude compared with the INS only navigation
8 Journal of Sensors
Time (s) Time (s) Time (s)0 10 15 20 25
Velo
city
(ms
)
Velo
city
(ms
)
Velo
city
(ms
)
minus02
0
02
04
06
08
1
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25minus05
0
05
1
15
2
25
3
35
4
10 15 20 25minus08
minus06
minus04
minus02
0
02
04
06
08
1Use EKF to estimate the VzUse EKF to estimate the VyUse EKF to estimate the Vx
5 0 5 0 5
Figure 9 The velocity estimation results
10 15 20 25
Dist
ance
(m)
minus2
minus15
minus1
minus05
0
05
1Use EKF to estimate the X
INS onlyEKF
INS onlyEKF
INS onlyEKF
Time (s)Time (s) Time (s)0 10 15 20 25
minus10
0
10
20
30
40
50
60Use EKF to estimate the Y
10 15 20 25
Dist
ance
(m)
Dist
ance
(m)
0
05
1
15
2
25 Use EKF to estimate the Z
50 5 0 5
Figure 10 The position estimation results
system can effectively improve the navigation performanceof MAV with a significant value of engineering application
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thisworkwas supported in part by the ChinaNational Fundsfor Distinguished Young Scientists (51225504) the National973 Program (2012CB723404) the National Natural ScienceFoundation of China (91123016 61171056) the ResearchProject Supported by Shanxi Scholarship Council of China
Journal of Sensors 9
Time (s)0 10 15 20 25
Roll
angl
e (de
g)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
0
1Use EKF to estimate the roll angle
Time (s) Time (s)5 10 15 20 25
Pitc
h an
gle (
deg
)
00 50
1
2
3
4
5
6Use EKF to estimate the pitch angle
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25
Yaw
angl
e (de
g)
minus2
0
2
4
6
8
10
12Use EKF to estimate the yaw angle
5
Figure 11 The attitude estimation results
050
Distance X (m)minus05
minus1minus15
Trajectory
minus2minus200
Distance Y (m)
2040
15
1
0
2
05
25
60
Dist
ance
Z (m
)
EKFGround truthINS only
Figure 12 Trajectory comparison results between ground truth INSonly and EKF
(2015-082) and the College Funding of North University ofChina (110246)
References
[1] C Friedman I Chopra and O Rand ldquoIndooroutdoor scan-matching based mapping technique with a helicopter MAV inGPS-denied environmentrdquo International Journal of Micro AirVehicles vol 7 no 1 pp 55ndash70 2015
[2] Y Hu H L Zhang and C Tan ldquoThe effect of the aerofoilthickness on the performance of theMAV scale cycloidal rotorrdquoAeronautical Journal vol 119 pp 343ndash364 2015
[3] M Samani M Tafreshi I Shafieenejad and A A NikkhahldquoMinimum-time open-loop and closed-loop optimal guidancewith GA-PSO and neural fuzzy for Samarai MAV flightrdquo IEEEAerospace and Electronic System Magazine vol 30 pp 28ndash372015
[4] G Flores S T Zhou R Lozano and P Castillo ldquoA visionand GPS-based real-time trajectory planning for a MAV inunknown and low-sunlight environmentsrdquo Journal of Intelligentamp Robotic Systems vol 74 no 1-2 pp 59ndash67 2014
[5] A Ali and N El-Sheimy ldquoLow-cost MEMS-based pedestriannavigation technique for GPS-denied areasrdquo Journal of Sensorsvol 2013 Article ID 197090 10 pages 2013
[6] X Chen C Shen W-B Zhang M Tomizuka Y Xu andK Chiu ldquoNovel hybrid of strong tracking Kalman filter andwavelet neural network for GPSINS during GPS outagesrdquoMeasurement vol 46 no 10 pp 3847ndash3854 2013
[7] T Zhang and X S Xu ldquoA new method of seamless landnavigation for GPSINS integrated systemrdquo Measurement vol45 no 4 pp 691ndash701 2012
[8] R Song X Y Chen C Shen and H Zhang ldquoModelingFOG drift using back-propagation neural network optimizedby artificial fish swarm algorithmrdquo Journal of Sensors vol 2014Article ID 273043 6 pages 2014
[9] H Q Huang X Y Chen Z K Zhou Y Xu and C P Lv ldquoStudyof the algorithm of backtracking decoupling and adaptiveextended kalman filter based on the quaternion expanded to thestate variable for underwater glider navigationrdquo Sensors vol 14no 12 pp 23041ndash23066 2014
[10] D H Yi T H Lee and D I Cho ldquoAfocal optical flow sensor forreducing vertical height sensitivity in indoor robot localizationand navigationrdquo Sensors vol 15 no 5 pp 11208ndash11221 2015
10 Journal of Sensors
[11] H Chao Y Gu and M Napolitano ldquoA survey of optical flowtechniques for UAV navigation applicationsrdquo in Proceedingsof the International Conference on Unmanned Aircraft Systems(ICUAS rsquo13) pp 710ndash716 IEEE Atlanta Ga USA May 2013
[12] F Martınez A Manzanera and E Romero ldquoAutomatic analysisand characterization of the hummingbird wings motion usingdense optical flow featuresrdquo Bioinspiration amp Biomimetics vol10 no 1 Article ID 016006 2015
[13] M P Rodriguez and A Nygren ldquoMotion estimation in cardiacfluorescence imaging with scale-space landmarks and opticalflow a comparative studyrdquo IEEE Transactions on BiomedicalEngineering vol 62 no 2 pp 774ndash782 2015
[14] W D Ding J LWang S L Han et al ldquoAdding optical flow intothe GPSINS integration for UAV navigationrdquo in Proceedings ofthe International Global Navigation Satellite Systems Society pp1ndash13 Surfers Paradise Australia 2009
[15] D AMercado G Flores P Castillo J Escareno and R LozanoldquoGPSINSOptic flow data fusion for position and velocityestimationrdquo in Proceedings of the International Conference onUnmanned Aircraft Systems (ICUAS rsquo13) pp 486ndash491 AtlantaGa USA May 2013
[16] M B Rhudy H Y Chao and Y Gu ldquoWide-field opticalflow aided inertial navigation for unmanned aerial vehiclesrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo14) pp 674ndash679 IEEEChicago Ill USA September 2014
[17] K Gageik M Strohmeier and S Montenegro ldquoAn autonomousUAV with an optical flow sensor for positioning and naviga-tionrdquo International Journal of Advanced Robotic Systems vol 10pp 1ndash9 2013
[18] D Honegger L Meier P Tanskanen and M Pollefeys ldquoAnopen source and open hardware embedded metric opticalflow CMOS camera for indoor and outdoor applicationsrdquo inProceedings of the IEEE International Conference on Roboticsand Automation (ICRA rsquo13) pp 1736ndash1741 Karlsruhe GermanyMay 2013
[19] H-D Zhao H-S Cao J-Z Zhu and H-S Zhang ldquoMethodof attitude measurement with magnetometer and gyroscoperdquoJournal of North University of China vol 31 no 6 pp 631ndash6352010 (Chinese)
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Journal of Sensors
Time (s) Time (s) Time (s)0 10 15 20 25
Velo
city
(ms
)
Velo
city
(ms
)
Velo
city
(ms
)
minus02
0
02
04
06
08
1
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25minus05
0
05
1
15
2
25
3
35
4
10 15 20 25minus08
minus06
minus04
minus02
0
02
04
06
08
1Use EKF to estimate the VzUse EKF to estimate the VyUse EKF to estimate the Vx
5 0 5 0 5
Figure 9 The velocity estimation results
10 15 20 25
Dist
ance
(m)
minus2
minus15
minus1
minus05
0
05
1Use EKF to estimate the X
INS onlyEKF
INS onlyEKF
INS onlyEKF
Time (s)Time (s) Time (s)0 10 15 20 25
minus10
0
10
20
30
40
50
60Use EKF to estimate the Y
10 15 20 25
Dist
ance
(m)
Dist
ance
(m)
0
05
1
15
2
25 Use EKF to estimate the Z
50 5 0 5
Figure 10 The position estimation results
system can effectively improve the navigation performanceof MAV with a significant value of engineering application
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
Thisworkwas supported in part by the ChinaNational Fundsfor Distinguished Young Scientists (51225504) the National973 Program (2012CB723404) the National Natural ScienceFoundation of China (91123016 61171056) the ResearchProject Supported by Shanxi Scholarship Council of China
Journal of Sensors 9
Time (s)0 10 15 20 25
Roll
angl
e (de
g)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
0
1Use EKF to estimate the roll angle
Time (s) Time (s)5 10 15 20 25
Pitc
h an
gle (
deg
)
00 50
1
2
3
4
5
6Use EKF to estimate the pitch angle
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25
Yaw
angl
e (de
g)
minus2
0
2
4
6
8
10
12Use EKF to estimate the yaw angle
5
Figure 11 The attitude estimation results
050
Distance X (m)minus05
minus1minus15
Trajectory
minus2minus200
Distance Y (m)
2040
15
1
0
2
05
25
60
Dist
ance
Z (m
)
EKFGround truthINS only
Figure 12 Trajectory comparison results between ground truth INSonly and EKF
(2015-082) and the College Funding of North University ofChina (110246)
References
[1] C Friedman I Chopra and O Rand ldquoIndooroutdoor scan-matching based mapping technique with a helicopter MAV inGPS-denied environmentrdquo International Journal of Micro AirVehicles vol 7 no 1 pp 55ndash70 2015
[2] Y Hu H L Zhang and C Tan ldquoThe effect of the aerofoilthickness on the performance of theMAV scale cycloidal rotorrdquoAeronautical Journal vol 119 pp 343ndash364 2015
[3] M Samani M Tafreshi I Shafieenejad and A A NikkhahldquoMinimum-time open-loop and closed-loop optimal guidancewith GA-PSO and neural fuzzy for Samarai MAV flightrdquo IEEEAerospace and Electronic System Magazine vol 30 pp 28ndash372015
[4] G Flores S T Zhou R Lozano and P Castillo ldquoA visionand GPS-based real-time trajectory planning for a MAV inunknown and low-sunlight environmentsrdquo Journal of Intelligentamp Robotic Systems vol 74 no 1-2 pp 59ndash67 2014
[5] A Ali and N El-Sheimy ldquoLow-cost MEMS-based pedestriannavigation technique for GPS-denied areasrdquo Journal of Sensorsvol 2013 Article ID 197090 10 pages 2013
[6] X Chen C Shen W-B Zhang M Tomizuka Y Xu andK Chiu ldquoNovel hybrid of strong tracking Kalman filter andwavelet neural network for GPSINS during GPS outagesrdquoMeasurement vol 46 no 10 pp 3847ndash3854 2013
[7] T Zhang and X S Xu ldquoA new method of seamless landnavigation for GPSINS integrated systemrdquo Measurement vol45 no 4 pp 691ndash701 2012
[8] R Song X Y Chen C Shen and H Zhang ldquoModelingFOG drift using back-propagation neural network optimizedby artificial fish swarm algorithmrdquo Journal of Sensors vol 2014Article ID 273043 6 pages 2014
[9] H Q Huang X Y Chen Z K Zhou Y Xu and C P Lv ldquoStudyof the algorithm of backtracking decoupling and adaptiveextended kalman filter based on the quaternion expanded to thestate variable for underwater glider navigationrdquo Sensors vol 14no 12 pp 23041ndash23066 2014
[10] D H Yi T H Lee and D I Cho ldquoAfocal optical flow sensor forreducing vertical height sensitivity in indoor robot localizationand navigationrdquo Sensors vol 15 no 5 pp 11208ndash11221 2015
10 Journal of Sensors
[11] H Chao Y Gu and M Napolitano ldquoA survey of optical flowtechniques for UAV navigation applicationsrdquo in Proceedingsof the International Conference on Unmanned Aircraft Systems(ICUAS rsquo13) pp 710ndash716 IEEE Atlanta Ga USA May 2013
[12] F Martınez A Manzanera and E Romero ldquoAutomatic analysisand characterization of the hummingbird wings motion usingdense optical flow featuresrdquo Bioinspiration amp Biomimetics vol10 no 1 Article ID 016006 2015
[13] M P Rodriguez and A Nygren ldquoMotion estimation in cardiacfluorescence imaging with scale-space landmarks and opticalflow a comparative studyrdquo IEEE Transactions on BiomedicalEngineering vol 62 no 2 pp 774ndash782 2015
[14] W D Ding J LWang S L Han et al ldquoAdding optical flow intothe GPSINS integration for UAV navigationrdquo in Proceedings ofthe International Global Navigation Satellite Systems Society pp1ndash13 Surfers Paradise Australia 2009
[15] D AMercado G Flores P Castillo J Escareno and R LozanoldquoGPSINSOptic flow data fusion for position and velocityestimationrdquo in Proceedings of the International Conference onUnmanned Aircraft Systems (ICUAS rsquo13) pp 486ndash491 AtlantaGa USA May 2013
[16] M B Rhudy H Y Chao and Y Gu ldquoWide-field opticalflow aided inertial navigation for unmanned aerial vehiclesrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo14) pp 674ndash679 IEEEChicago Ill USA September 2014
[17] K Gageik M Strohmeier and S Montenegro ldquoAn autonomousUAV with an optical flow sensor for positioning and naviga-tionrdquo International Journal of Advanced Robotic Systems vol 10pp 1ndash9 2013
[18] D Honegger L Meier P Tanskanen and M Pollefeys ldquoAnopen source and open hardware embedded metric opticalflow CMOS camera for indoor and outdoor applicationsrdquo inProceedings of the IEEE International Conference on Roboticsand Automation (ICRA rsquo13) pp 1736ndash1741 Karlsruhe GermanyMay 2013
[19] H-D Zhao H-S Cao J-Z Zhu and H-S Zhang ldquoMethodof attitude measurement with magnetometer and gyroscoperdquoJournal of North University of China vol 31 no 6 pp 631ndash6352010 (Chinese)
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Sensors 9
Time (s)0 10 15 20 25
Roll
angl
e (de
g)
minus9
minus8
minus7
minus6
minus5
minus4
minus3
minus2
minus1
0
1Use EKF to estimate the roll angle
Time (s) Time (s)5 10 15 20 25
Pitc
h an
gle (
deg
)
00 50
1
2
3
4
5
6Use EKF to estimate the pitch angle
INS onlyEKF
INS onlyEKF
INS onlyEKF
10 15 20 25
Yaw
angl
e (de
g)
minus2
0
2
4
6
8
10
12Use EKF to estimate the yaw angle
5
Figure 11 The attitude estimation results
050
Distance X (m)minus05
minus1minus15
Trajectory
minus2minus200
Distance Y (m)
2040
15
1
0
2
05
25
60
Dist
ance
Z (m
)
EKFGround truthINS only
Figure 12 Trajectory comparison results between ground truth INSonly and EKF
(2015-082) and the College Funding of North University ofChina (110246)
References
[1] C Friedman I Chopra and O Rand ldquoIndooroutdoor scan-matching based mapping technique with a helicopter MAV inGPS-denied environmentrdquo International Journal of Micro AirVehicles vol 7 no 1 pp 55ndash70 2015
[2] Y Hu H L Zhang and C Tan ldquoThe effect of the aerofoilthickness on the performance of theMAV scale cycloidal rotorrdquoAeronautical Journal vol 119 pp 343ndash364 2015
[3] M Samani M Tafreshi I Shafieenejad and A A NikkhahldquoMinimum-time open-loop and closed-loop optimal guidancewith GA-PSO and neural fuzzy for Samarai MAV flightrdquo IEEEAerospace and Electronic System Magazine vol 30 pp 28ndash372015
[4] G Flores S T Zhou R Lozano and P Castillo ldquoA visionand GPS-based real-time trajectory planning for a MAV inunknown and low-sunlight environmentsrdquo Journal of Intelligentamp Robotic Systems vol 74 no 1-2 pp 59ndash67 2014
[5] A Ali and N El-Sheimy ldquoLow-cost MEMS-based pedestriannavigation technique for GPS-denied areasrdquo Journal of Sensorsvol 2013 Article ID 197090 10 pages 2013
[6] X Chen C Shen W-B Zhang M Tomizuka Y Xu andK Chiu ldquoNovel hybrid of strong tracking Kalman filter andwavelet neural network for GPSINS during GPS outagesrdquoMeasurement vol 46 no 10 pp 3847ndash3854 2013
[7] T Zhang and X S Xu ldquoA new method of seamless landnavigation for GPSINS integrated systemrdquo Measurement vol45 no 4 pp 691ndash701 2012
[8] R Song X Y Chen C Shen and H Zhang ldquoModelingFOG drift using back-propagation neural network optimizedby artificial fish swarm algorithmrdquo Journal of Sensors vol 2014Article ID 273043 6 pages 2014
[9] H Q Huang X Y Chen Z K Zhou Y Xu and C P Lv ldquoStudyof the algorithm of backtracking decoupling and adaptiveextended kalman filter based on the quaternion expanded to thestate variable for underwater glider navigationrdquo Sensors vol 14no 12 pp 23041ndash23066 2014
[10] D H Yi T H Lee and D I Cho ldquoAfocal optical flow sensor forreducing vertical height sensitivity in indoor robot localizationand navigationrdquo Sensors vol 15 no 5 pp 11208ndash11221 2015
10 Journal of Sensors
[11] H Chao Y Gu and M Napolitano ldquoA survey of optical flowtechniques for UAV navigation applicationsrdquo in Proceedingsof the International Conference on Unmanned Aircraft Systems(ICUAS rsquo13) pp 710ndash716 IEEE Atlanta Ga USA May 2013
[12] F Martınez A Manzanera and E Romero ldquoAutomatic analysisand characterization of the hummingbird wings motion usingdense optical flow featuresrdquo Bioinspiration amp Biomimetics vol10 no 1 Article ID 016006 2015
[13] M P Rodriguez and A Nygren ldquoMotion estimation in cardiacfluorescence imaging with scale-space landmarks and opticalflow a comparative studyrdquo IEEE Transactions on BiomedicalEngineering vol 62 no 2 pp 774ndash782 2015
[14] W D Ding J LWang S L Han et al ldquoAdding optical flow intothe GPSINS integration for UAV navigationrdquo in Proceedings ofthe International Global Navigation Satellite Systems Society pp1ndash13 Surfers Paradise Australia 2009
[15] D AMercado G Flores P Castillo J Escareno and R LozanoldquoGPSINSOptic flow data fusion for position and velocityestimationrdquo in Proceedings of the International Conference onUnmanned Aircraft Systems (ICUAS rsquo13) pp 486ndash491 AtlantaGa USA May 2013
[16] M B Rhudy H Y Chao and Y Gu ldquoWide-field opticalflow aided inertial navigation for unmanned aerial vehiclesrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo14) pp 674ndash679 IEEEChicago Ill USA September 2014
[17] K Gageik M Strohmeier and S Montenegro ldquoAn autonomousUAV with an optical flow sensor for positioning and naviga-tionrdquo International Journal of Advanced Robotic Systems vol 10pp 1ndash9 2013
[18] D Honegger L Meier P Tanskanen and M Pollefeys ldquoAnopen source and open hardware embedded metric opticalflow CMOS camera for indoor and outdoor applicationsrdquo inProceedings of the IEEE International Conference on Roboticsand Automation (ICRA rsquo13) pp 1736ndash1741 Karlsruhe GermanyMay 2013
[19] H-D Zhao H-S Cao J-Z Zhu and H-S Zhang ldquoMethodof attitude measurement with magnetometer and gyroscoperdquoJournal of North University of China vol 31 no 6 pp 631ndash6352010 (Chinese)
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Journal of Sensors
[11] H Chao Y Gu and M Napolitano ldquoA survey of optical flowtechniques for UAV navigation applicationsrdquo in Proceedingsof the International Conference on Unmanned Aircraft Systems(ICUAS rsquo13) pp 710ndash716 IEEE Atlanta Ga USA May 2013
[12] F Martınez A Manzanera and E Romero ldquoAutomatic analysisand characterization of the hummingbird wings motion usingdense optical flow featuresrdquo Bioinspiration amp Biomimetics vol10 no 1 Article ID 016006 2015
[13] M P Rodriguez and A Nygren ldquoMotion estimation in cardiacfluorescence imaging with scale-space landmarks and opticalflow a comparative studyrdquo IEEE Transactions on BiomedicalEngineering vol 62 no 2 pp 774ndash782 2015
[14] W D Ding J LWang S L Han et al ldquoAdding optical flow intothe GPSINS integration for UAV navigationrdquo in Proceedings ofthe International Global Navigation Satellite Systems Society pp1ndash13 Surfers Paradise Australia 2009
[15] D AMercado G Flores P Castillo J Escareno and R LozanoldquoGPSINSOptic flow data fusion for position and velocityestimationrdquo in Proceedings of the International Conference onUnmanned Aircraft Systems (ICUAS rsquo13) pp 486ndash491 AtlantaGa USA May 2013
[16] M B Rhudy H Y Chao and Y Gu ldquoWide-field opticalflow aided inertial navigation for unmanned aerial vehiclesrdquoin Proceedings of the IEEERSJ International Conference onIntelligent Robots and Systems (IROS rsquo14) pp 674ndash679 IEEEChicago Ill USA September 2014
[17] K Gageik M Strohmeier and S Montenegro ldquoAn autonomousUAV with an optical flow sensor for positioning and naviga-tionrdquo International Journal of Advanced Robotic Systems vol 10pp 1ndash9 2013
[18] D Honegger L Meier P Tanskanen and M Pollefeys ldquoAnopen source and open hardware embedded metric opticalflow CMOS camera for indoor and outdoor applicationsrdquo inProceedings of the IEEE International Conference on Roboticsand Automation (ICRA rsquo13) pp 1736ndash1741 Karlsruhe GermanyMay 2013
[19] H-D Zhao H-S Cao J-Z Zhu and H-S Zhang ldquoMethodof attitude measurement with magnetometer and gyroscoperdquoJournal of North University of China vol 31 no 6 pp 631ndash6352010 (Chinese)
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of