
Research Article Multidisciplinary Design Optimization...
12
Research Article Multidisciplinary Design Optimization of Crankshaft Structure Based on Cooptimization and Multi-Island Genetic Algorithm Jian Liu, Gaoyuan Yu, Yao Li, Hongmin Wang, and Wensheng Xiao Research Center for Marine Oil-Gas Equipment and Security Technology, China University of Petroleum (East China), Qingdao 266580, China Correspondence should be addressed to Gaoyuan Yu; [email protected] Received 11 November 2015; Accepted 19 May 2016 Academic Editor: Burak Eksioglu Copyright © 2016 Jian Liu et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. e feasibility design method with multidisciplinary and multiobjective optimization is applied in the research of lightweight design and NVH performances of crankshaſt in high-power marine reciprocating compressor. Opt-LHD is explored to obtain the experimental scheme and perform data sampling. e elliptical basis function neural network (EBFNN) model considering modal frequency, static strength, torsional vibration angular displacement, and lightweight design of crankshaſt is built. Deterministic optimization and reliability optimization for lightweight design of crankshaſt are operated separately. Multi-island genetic algorithm (MIGA) combined with multidisciplinary cooptimization method is used to carry out the multiobjective optimization of crankshaſt structure. Pareto optimal set is obtained. Optimization results demonstrate that the reliability optimization which considers the uncertainties of production process can ensure product stability compared with deterministic optimization. e coupling and decoupling of structure mechanical properties, NVH, and lightweight design are considered during the multiobjective optimization of crankshaſt structure. Designers can choose the optimization results according to their demands, which means the production development cycle and the costs can be significantly reduced. 1. Introduction New marine reciprocating compressors must have high power, high pressure ratio, and slight vibration and be environmentally friendly with the development of marine natural gas boosting and gathering [1]. erefore, the effect of each component of the compressors on its overall perfor- mance should be investigated in detail. Crankshaſt systems of reciprocating compressors have an effective influence on compressor performance, being the main part responsible for vibration production [2]. e high-power reciprocating compressors are designed to run onshore; accordingly, the support of compressors cannot match the crankshaſt structure parameters and there are some drawbacks such as loud noise and high vibration intensity caused by gas force, reciprocating inertia force, and centrifugal force when it is used offshore [3–5]. Consequently, the parameters of crankshaſt structure should be changed. To study parameters effect will face longer time period, higher experimental cost, and complicated verification pro- cess through the experiment of compressor [6]. e crankshaſt structure is a complex engineering sys- tem involving structural mechanics, mechanical vibration and noise, and man-machine-environment engineering. e crankshaſt structure design is a complex multidisciplinary and multistage design process relating to high correlation and coupling between all disciplines. e whole process can be described by a complex function. e optimized parameters combination of crankshaſt structure is obtained by iterating and optimizing. Consequently, it is a key factor to choose a suitable algorithm to solve this issue. Studies on crankshaſt of reciprocating compressors mainly focus on vibration and stress analyses [7–10]. Although stress analyses of crankshaſts are available in literature, there are few studies on the optimization of crankshaſt. Almasi [6] optimized the configuration of the compressor critical components to improve the performance and reliability. Yang et al. [11] intro- duced a new approach to analyses vibration performance of small reciprocating compressor on the basis of artificial neural networks and support vector machines. And the classification of compressor is achieved. Benini [12] proposed Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2016, Article ID 9596089, 11 pages http://dx.doi.org/10.1155/2016/9596089
Transcript of Research Article Multidisciplinary Design Optimization...

Research ArticleMultidisciplinary Design Optimization of Crankshaft StructureBased on Cooptimization and Multi-Island Genetic Algorithm
Jian Liu Gaoyuan Yu Yao Li Hongmin Wang and Wensheng Xiao
Research Center for Marine Oil-Gas Equipment and Security Technology China University of Petroleum (East China)Qingdao 266580 China
Correspondence should be addressed to Gaoyuan Yu 961023731qqcom
Received 11 November 2015 Accepted 19 May 2016
Academic Editor Burak Eksioglu
Copyright copy 2016 Jian Liu et al This is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The feasibility design method with multidisciplinary and multiobjective optimization is applied in the research of lightweightdesign and NVH performances of crankshaft in high-power marine reciprocating compressor Opt-LHD is explored to obtain theexperimental scheme and perform data samplingThe elliptical basis function neural network (EBFNN) model considering modalfrequency static strength torsional vibration angular displacement and lightweight design of crankshaft is built Deterministicoptimization and reliability optimization for lightweight design of crankshaft are operated separatelyMulti-island genetic algorithm(MIGA) combinedwithmultidisciplinary cooptimizationmethod is used to carry out themultiobjective optimization of crankshaftstructure Pareto optimal set is obtained Optimization results demonstrate that the reliability optimization which considers theuncertainties of production process can ensure product stability compared with deterministic optimization The coupling anddecoupling of structuremechanical properties NVH and lightweight design are considered during themultiobjective optimizationof crankshaft structure Designers can choose the optimization results according to their demands which means the productiondevelopment cycle and the costs can be significantly reduced
1 Introduction
New marine reciprocating compressors must have highpower high pressure ratio and slight vibration and beenvironmentally friendly with the development of marinenatural gas boosting and gathering [1] Therefore the effectof each component of the compressors on its overall perfor-mance should be investigated in detail Crankshaft systemsof reciprocating compressors have an effective influence oncompressor performance being themain part responsible forvibration production [2]
The high-power reciprocating compressors are designedto run onshore accordingly the support of compressorscannot match the crankshaft structure parameters and thereare some drawbacks such as loud noise and high vibrationintensity caused by gas force reciprocating inertia force andcentrifugal forcewhen it is used offshore [3ndash5] Consequentlythe parameters of crankshaft structure should be changedTo study parameters effect will face longer time periodhigher experimental cost and complicated verification pro-cess through the experiment of compressor [6]
The crankshaft structure is a complex engineering sys-tem involving structural mechanics mechanical vibrationand noise and man-machine-environment engineering Thecrankshaft structure design is a complex multidisciplinaryand multistage design process relating to high correlationand coupling between all disciplines The whole processcan be described by a complex function The optimizedparameters combination of crankshaft structure is obtainedby iterating and optimizing Consequently it is a key factorto choose a suitable algorithm to solve this issue Studieson crankshaft of reciprocating compressors mainly focus onvibration and stress analyses [7ndash10] Although stress analysesof crankshafts are available in literature there are few studieson the optimization of crankshaft Almasi [6] optimizedthe configuration of the compressor critical components toimprove the performance and reliability Yang et al [11] intro-duced a new approach to analyses vibration performanceof small reciprocating compressor on the basis of artificialneural networks and support vector machines And theclassification of compressor is achieved Benini [12] proposed
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2016 Article ID 9596089 11 pageshttpdxdoiorg10115520169596089
2 Mathematical Problems in Engineering
a multiobjective optimization algorithm in transonic com-pressor rotor structure and improved the pressure ratio Hoet al [13] improved the crankshaft reliability by Monte Carlosimulation on the basis of the finite element model Althoughthe algorithms mentioned earlier are effective in obtainingthe optimal solution comprehensive design is difficult toachieve by single discipline Therefore multidisciplinarydesign optimization (MDO) theory is necessary to achievethe comprehensive design of crankshaft [14 15]
Although multiple parameters affect the performance ofcompressor the amount of data obtained by compressorexperiment is limited The EBFNN theory is good at solvingsmall sample learning problems [16 17] Due to its strongability of nonlinear function approximation and excellentgeneralization capacity EBFNN has been widely used in thefield of industrial engineering
In this paper the coupling and interdisciplinary rela-tionships of mechanical properties NVH and lightweightare considered and the MDO technology roadmap of thereciprocating compressorwas proposed on the basis of virtualproving ground (VPG) technology Cooptimization based onEBFNN and multi-island genetic algorithm is applied to themultiobjective optimization of crankshaft structure in orderto gain the Pareto optimal solution set
2 MDO of the Crankshaft Structure
TheMDO theory is applied in crankshaft structure design onthe basis ofVPGTheflowchart of the enforceable technologyroadmap is shown in Figure 1
The crankshaft MDO issues mainly focus on the effectiveoptimization strategy to achieve concurrent design of multi-disciplinary subsystems and obtain the satisfactory solutionThe strategy combines the knowledge from different sub-jects with optimization algorithm and develops an effectivemethod to solve the complex problems [18 19]
The MDO optimization framework can be divided intosingle-stage and multiple-stage The single-stage optimiza-tion framework is composed of multidisciplinary feasiblemethod (MDF) and individual discipline feasible method(IDF) The multistage optimization framework consists ofconcurrent subspace optimization (CSSO) cooptimization(CO) and bilevel integrated (Bliss)
In this paper the CO ismainly studied CO is amultistageMDO algorithm on the basis of the optimization algorithmunder consistency constraints It divides the crankshaftMDO issues into one system-level optimization and multiplesubsystem-level optimization
The system-level optimization objective of crankshaft canbe expressed as
min 119865 (119885)
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(1)
The subsystem-level optimization objective of crankshaftis listed as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2+
1003816100381610038161003816119884119894 minus 119885119894
1003816100381610038161003816
2
Crank-shaft Link Cross-
head Piston Frame Support and
virtual environ-
mentMultibody systemsimulation model
Virtual prototypemodel of the compressor
Assemble
Modeling processof the compressor
Mechanicalproperties NVH Other
subsystems
Hierarchical structuralclassification of crankshaft
Designobjective
Designvariable
Designvariable
Multiobjectiveoptimization
on the basis of EBF
Multiobjectiveoptimization
on the basis of EBF
Optimal model
Coupling and interdisciplinaryrelationships of intersystem
Multidiscipline design optimization and analysis
Designobjective middot middot middot
middot middot middot
middot middot middot
Figure 1 MDO technology roadmap on the basis of VPG
st 119866119906 (119885) lt 0 119906 = 1 2 119901
119867V (119885) = 0 V = 1 2 119902
(2)
The meaning of the symbols in the formula is shown asfollows
119883119894 design variable of 119894 subsystem
119884119894 state variable of 119894 subsystem
119885119894 target expectation of system-level design variable
119865 system-level objective function
119869119894(119885) objective function of 119894 subsystem
119866119906(119885) inequality constraint of 119894 subsystem
119867V(119885) equality constraint of 119894 subsystem
119901 quantity of the corresponding function
119902 quantity of the corresponding function
120576 slack variable
Mathematical Problems in Engineering 3
3 Multiobjective OptimizationProblems and Solving
31 Multiobjective Optimization Problem Multiobjectiveoptimization problem (MOP) of crankshaft can be repre-sented as
min 119910 = 119865 (119909) = (1198911 (119909) 1198912 (119909) 119891119899 (119909))
st 119892119894 (119909) lt 0 119894 = 1 2 119897
ℎ119895 (119909) = 0 119895 = 1 2 119898
119909119871le 119909 le 119909
119880119909 = (119909
1 1199092 119909
119903) isin 119883
(3)
The meaning of the symbols in the formula is shown asfollows
119910 target vector which can represent the optimizationobjectives of mechanical properties NVH and othersubsystems of the crankshaft119892119894(119909) equality constraint of 119894 subsystem
ℎ119895(119909) equality constraint of 119894 subsystem
119909 decision vector119909119871 lower bound of decision vector
119909119880 upper bound of decision vector
119883 decision space formed by decision vector119897 quantity of the corresponding function119898 quantity of the corresponding function119899 quantity of the corresponding function119903 quantity of the corresponding function
With the given crankshaftMOP issue the Pareto optimalsolution can be defined as follows if and only if there exists nofeasible solution (119909
119861belongs to119883) which makes 119865(119909
119861) better
than 119865(119909119860) will 119909
119860belongs to119883 be one of the Pareto optimal
solutions Hence the optimal Pareto set can be represented as
119909119891
= 119909119860
isin 119883 | forall119909119861notin 119883 | 119865 (119909
119861) gt 119865 (119909
119860) (4)
Inevitably the MDO of the crankshaft is accompanied bythe MOP of the crankshaft MOP of the crankshaft cannotachieve best possible optimization of all objectives simultane-ously and arbitrary solution of Pareto set will possibly becomethe satisfactory solution
32 Solving of MOP The evaluation methods of MOP canbe divided into global optimization algorithms and localoptimization algorithmsThe global optimization algorithmsinclude genetic algorithm simulated annealing algorithmparticle swarm optimization and ant colony algorithm Dueto their high capability of global search high speeds of con-vergence and search results independent on starting pointthe global optimization algorithms are capable of solving highdimensional and nonlinear problems But the computationmight be expensive and sometimes unsatisfactory local opti-mization effect [20ndash22] The local optimization algorithmsinclude constraint algorithm weighting algorithm distance
Start
Island1
geneticevolution
Populationinitialization
Interislandmigration
Iterationstopping
End
MigrationYes
No
Production ofoffspring population
by crossover andmutation
Combination ofparents and
offspring individuals
Population ranksand crowding
distance calculation
Individual survivalowing to higher
fitness
Interisland process
Island2
geneticevolution
Island
geneticevolution
No
Yes
middot middot middotn
Figure 2 Flow chart of MIGA
function algorithm and gradient descent algorithmThe localoptimal optimization algorithms mentioned earlier have astrong ability in finding the local optimal solution but itis difficult to choose the starting point of high dimensionaland nonlinear problems [23 24] Hence multi-island geneticalgorithm is chosen to solve the application issue The multi-island algorithm can maintain optimal solution diversity andimprove the local optimization effect by interislandmigrationon the basis of traditional genetic algorithm [25] The flowchart of MIGA is shown in Figure 2
4 Multiobjective Optimization of Crankshaft
41 NVH Simulation of Crankshaft The modal analysis isan important part of dynamic analysis in reciprocatingcompressor machine system which can help us understandthe dynamic characteristic of the system The natural fre-quency of crankshaft is usually calculated to avoid resonancesduring use in the design of NVH Severe deforming partsof crankshaft are observed to judge the strength of thecorresponding structure which may become noise vibrationsource or main transfer path and should be modified early
There are 269612 entity units and 452154 nodes on thefinite element model of crankshaft NVH The characteristicof NVH is studied by crankshaftmodal analysis and torsionalvibration
The crankshaft modal is computed by ANSYS underfree boundary Therefore the first-order natural frequency is41413Hz The second-order natural frequency is 4354Hz
In the process of the torsional vibration analysis themodal superpositionmethod is used to simplify the finite ele-ment of crankshaft The elastic deformation of the structureis solved approximately by linear combination of suitablemodes which can be shown as follows
[119906] = [120593] [119902] (5)
4 Mathematical Problems in Engineering
The meaning of the symbols in the formula is shown asfollows
[119906] displacement matrix[120593] modal shape function matrix[119902] vector of modal coordinates
An elastic body contains two types of nodes interfacenodes where forces and boundary conditions interact withthe structure during multibody system simulation (MSS)and interior nodes In MSS the position of the elastic bodyis computed by superposing its rigid body motion andelastic deformation In ADAMS this is performed usingldquoComponent Mode Synthesisrdquo technique based on Craig-Bampton method [8 9] The component modes containstatic and dynamic behavior of the structure The modaltransformation between the physical DOF and the Craig-Bampton modes and their modal coordinates is described by[2]
[119906] =
119906119861
1199061
= [
119868 0
120593119862
120593119873
]
119902119862
119902119873
(6)
The meaning of the symbols in the formula is shown asfollows
119906119861 column vectors of boundary DOF
1199061 column vectors of interior DOF
119868 identity matrix0 zero matrix120593119862 matrix of physical displacements of the interior
DOF in the constraint modes120593119873 matrix of physical displacements of the interior
DOF in the normal modes119902119862 column vector of modal coordinates of the con-
straint modes119902119873 column vector of modal coordinates of the fixed
boundary normal modes
To obtain decoupled set ofmodes constrainedmodes andnormal modes are orthogonalized
The crankshaft systemmodel is shown in Figure 3 Elastic3D solid crankshaft model of reciprocating compressor isobtained inANSYS usingmodal superpositionmethod First3D solid model of the crankshaft is imported to ANSYS andfinite element model of the crankshaft is obtained Flexiblecrankshaft model is obtained through modal synthesis con-sidering the first 30 fixed boundary normalmodesThen thismodel is imported to ADAMSView and 3D finite elementmodel is run with ADAMS
42 Strength of Crankshaft The boundary condition ofcrankshaft strength analysis is shown in Figure 4 The radialand axial freedom of main bearings from A to F areconstrained Forces in a reciprocating compressor can bedivided into gas forces piston lateral impact forces andinertia forces The gas forces are applied on the prismatic
xy
z
Figure 3 Model of crankshaft system
⑤
I II III IV V VI
⑥④① ② ③
Figure 4 Boundary condition of crankshaft strength analysis
pairs of pistonThen excitation force and torque acted on thecrankpin from I to VI are obtained byMSS In the calculationexample the rotate speed of crankshaft is set to 994 rmin themanifold pressure is set to 20Mpa and the exhaust pressureis set to 60Mpa The type of cylinder is double-acting
5 Multidisciplinary Optimization ofCrankshaft
The deterministic optimization reliability optimization andmultiobjective optimization are operated independently onthe basis of EBFNN andCOThe flow chart ofMDO is shownin Figure 5
51 System Decomposition Systems in crankshaft structurecan be divided into mass NVH and strength subsystemThe NVH subsystem includes modal analysis and torsionalvibration
52 Design Variable The structure of crankshaft system hasan important effect on the torsional vibration strengthnatural frequency and mass of crankshaft As the crankshaftis constrained by the dimension and assembly of connectingrod frame and other parts the dimension of crank journalscrankpins and bore spacing cannot be changed in thiscalculation example Consequently transitional fillet (119909
1)
oil passage (1199092) and shape parameters of lightening holes
(1199093 1199094 1199095) are chosen as the design variables which is shown
in Figure 6
53 Experiment Design Opt-LHD is adopted to obtain theexperimental scheme and perform data sampling The ellip-tical basis function neural network (EBFNN) model con-sidering modal frequency static strength torsional vibration
Mathematical Problems in Engineering 5
System decomposition
Experiment design
Satisfyingprecision
Single-objectoptimization
End
No
Multiobjectoptimization
A set of sampleddata given by
experiment design
Disciplinaryanalysis 1
Training
Establishment of EBF
Consideringuncertainty
Reliabilityoptimization
Deterministicoptimization
Convergence
Pareto set
Select optimalsolution
Meetrequirement
Yes
Yes
YesNo
No
Yes
No
YesNo
Disciplinary
Disciplinaryanalysis 1
Disciplinaryanalysis n
analysis nmiddot middot middot
middot middot middot
Figure 5 Flow chart of crankshaft system MDO
Oil passage x2
Lightening holes
Transitional fillet x1
x3 x4 x5
Figure 6 Design variables of MDO
angular displacement and lightweight design of crankshaft isbuilt The experimental scheme is listed in Table 1
Targets in NVH subsystem include first-order modalfrequency (119891
1) second-order modal frequency (119891
2) and the
maximum torsional angular vibration over a period time(120579max) Targets in strength subsystem include the maximumload on the main bearing over a period (119865
1 1198652 1198653 1198654 1198655 1198656)
0 4 8 12 16 20838
840
842
844
846
Sample n
Cran
ksha
ft m
assm
(kg)
Figure 7 Result of crankshaft mass
Table 1 Experimental scheme based on Opt-LHD
SampleDesign variables
1199091
1199092
1199093
1199094
1199095
mm mm mm mm mm1 918 1653 4684 3842 7502 782 1463 4053 3526 72893 761 1674 3105 4053 65534 771 1758 4579 3947 70795 887 1484 4263 4158 5506 834 1568 500 3316 63427 75 1547 4474 4579 60268 897 180 3421 4368 68689 939 1737 4368 3421 613210 845 1632 3316 500 571111 866 1421 4895 4474 697412 908 1611 300 3632 592413 855 1695 3526 300 718414 95 1526 3737 4684 665815 803 1779 4158 3737 560516 929 1442 3947 3211 676317 792 1505 3632 3105 581618 824 140 3211 4263 644719 876 1716 4789 4789 623720 813 1589 3842 4895 7395
and the maximum stress over a period time (120590max) Mass ofthe crankshaft (119898) is the target of the mass subsystem
The time of training is set to 20 based on the parallelcomputing The result is listed from Figures 7ndash11
54 Surrogate Model Each response is mapped to ellipticalbasis function surrogate model on the theory of the ellipticalbasis function neural network It is shown in Figure 12
6 Mathematical Problems in EngineeringN
atur
al fr
eque
ncy
(Hz)
0 4 8 12 16 20410
417
424
431
438
Sample n
f2
f1
Figure 8 Result of modal frequency
0 4 8 12 16 20Sample n
08
07
06
05
04
Tors
iona
l ang
ular
vib
ratio
n120579
max
(∘)
Figure 9 Result of themaximumof torsional angular vibration overa period time
0 4 8 12 16 20400
600
800
1000
1200
Max
imum
stre
ss120590
max
(Mpa
)
Sample n
Figure 10 Result of the maximum stress over a period time
0 4 8 12 16 20110
119
128
137
146
Mai
n be
arin
g lo
ad (k
N)
F1 F2F3F4
F5 F6
Sample n
Figure 11 Result of main bearing load over a period time
n
Fiveinfluence
factorsof
crankshaft
1
2Surrogate
modelof
eachtarget
Input Output
Hidden-layer
y1
y2
ym
x1
xh
Figure 12 EBFNN model of crankshaft
The elliptical basis function neural network includingℎ input parameters 119899 hidden-layer nodes and 119898 outputparameters can be described by
119910119898 (119883) =
119899
sum
119894=1
[120572119898119894V119894 (119909)] + 120572
119898(119899+1) (7)
The meaning of the symbols in the formula is shown asfollows
119909 design variable120572119898119894 link weight between 119894th hidden-layer node and
119898th output parameterV119894(119909) base function by using Mahalanobis distance
which can be described by
V119894 (119909) = (119909 minus 119909
119894)119879119878minus1
(119909 minus 119909119894) (8)
The meaning of the symbols in the formula is shown asfollows
119878 covariance matrix which can be described by
119878 =1
119899
119899
sum
119894=1
(119909119894minus 120583) (119909
119894minus 120583)119879 (9)
Here 120583 is the sample data center
Mathematical Problems in Engineering 7
1416
18
09
085
08
075
07
065
Variable x2 (mm)
959
858
75 Variable x1(mm)
086
084
082
08
078
076
074
072
07
068
Mas
sm(k
g)
Figure 13 Response surface of mass normalization
Having gained output responses 119910 = (119910(1)
119910(1)
119910(119899)
0) corresponding to 119899 samples the connection matrixcan be described by the following
120572 =
[[[[[[
[
[[[[
[
V1(1199091) sdot sdot sdot V
1(119909119899)
d
V119899(1199091) sdot sdot sdot V
119899(119909119899)
]]]]
]
1
1 0
]]]]]]
]
119910 (10)
The tan-sigmoid function is used in this neural networkHence ideal output results should be close or equal to 1 Thenormalization processing of experiment data is carried outwhich can be described by
119884119894= 01 + 08 times
119910119894minus 119910119894min
119910119894max minus 119910
119894min (11)
The meaning of the symbols in the formula is shown asfollows
119884119894 output values of normalization neural network
119910119894 experimental data
119910119894min the minimum experimental data
119910119894max the maximum experimental data
The elliptical basis function surrogate model betweendesign variables and its analysis target can be solved com-bining formulas (6) to (11) The response surface of masstorsional angular vibration and the maximum stress areplotted in Figures 13ndash15
As the elliptical basis function surrogate model betweeninput variables and its analysis targets cannot be describedby a specific function correlation coefficients (1198772) are usedto evaluate the degree of approximation between eachmodelThe better the fitting of the surrogate model is the closer the1198772 is to 1 The correlation coefficients can be described by
1198772= 1 minus
sum119899
119894=1(119910119894minus 119884)2
sum119899
119894=1(119910119894minus 119910)2 (12)
1416
18
The m
axim
um st
ress120590
max 1
08
06
04
02
Variable x2 (mm)
959
858
75 Variable x1(mm)
08
07
06
05
04
03
Figure 14 Response surface of the maximum stress normalization
1416
18
Tors
iona
l ang
ular
vibr
atio
n120579
07
065
06
055
05
Variable x2 (mm)
959
858
75Variable x1
(mm)
064
063
062
061
06
059
058
057
056
055
054
Figure 15 Response surface of torsional angular vibration normal-ization
The meaning of the symbols in the formula is shown asfollows
119910 average of sample response
119899 experiments
The fitting of the surrogate model can be solved by for-mula (11) and formula (12) The correlation coefficient valuesof the elliptical basis function surrogatemodel correspondingto crankshaftmass torsional angular vibration and themaxi-mum stress over a period time aremore than 090The resultsshow that the surrogate model of the elliptical function cantruly reflect function mapping between design variable andanalysis objective The approximate model corresponding todesign variable is precise and can be used for optimization
55 Single-Object Lightweight Optimization of CrankshaftThe deterministic system-level optimization objective can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(13)
8 Mathematical Problems in Engineering
The deterministic subsystem-level optimization objectivecan be represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 120590max lt [120590]
120579max le [120579]
119865119894le 1198651198940
119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(14)
The meaning of the symbols in the formula is shown asfollows
120576 10minus5[120579] allowable torsional angular vibration[120590] allowable stress119883119895 design variable of crankshaft 119895 = 1 2 3 4 5
119909119895L lower bound of design variable
119909119895U upper bound of design variable
1198651198940 initial maximum load on main bearing over a
period time 119894 = 1 2 3 4 5 6
In the design of crankshaft structure system uncertaintyis caused by various factors such as structure parameterssystem forecastmodel sampling technology judgments crite-rion and human factors Accordingly reliability optimizationis adopted to control and eliminate system uncertainty
The reliability system-level optimization model can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(15)
The reliability subsystem-level optimization objective canbe represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 119875 [120590max lt [120590]] minus Φ (120573) le 0
119875 [120579max le [120579]] minus Φ (120573) le 0
119875 [119865119894le 1198651198940] minus Φ (120573) le 0 119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(16)
The meaning of the symbols in the formula is shown asfollows
119875(∙) probability of failure constrains120573 reliability indexΦ(120573) first-order estimate of reliability which obeysthe normal distribution
The determined optimization and reliability optimizationare operated independently on the basis of MIGA Theadvanced options of MIGA are listed in Table 2
Table 2 Advanced options of MIGA
Options Parameter settingSubpopulation size 20Number of islands 10Number of generations 50Rate of crossover 08Rate of mutation 00075Rate of migration 025Interval of migration 5Relative tournament size 05Elite 10
The initialization range and optimization results of eachdesign variable are listed in Table 3
The optimization results show that the weight of thecrankshaft is reduced 72 kg which accounts for 085 ofthe initial mass However the uncertain factors are notconsidered The weight of the structure is reduced 59 kgthrough reliability optimization The reliability optimizationcan not only achieve the lightweight of the crankshaft butalso ensure the reliability and robustness in engineeringquality
56 Multiobjective Optimization of MDO of Crankshaft Struc-ture According to formula (3) multiobjective optimizationproblem can be represented as
min 119910 = 119865 (119909) = (1198911 (119909) 1198912 (119909) 119891119899 (119909))
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(17)
Here 119891119894(119909) (119894 = 1 2 119899) is the analysis target of
designer which can represent crankshaft mass first-ordermodal frequency second-order modal frequency torsionalangular vibration the maximum stress over a period time orthe maximummain bearing load over a period time
The range of the design variables and the optimizationobjectives need to be determined by actual production MOPcan be defined as tree-objective optimization when there aretwo optimization objectives in formula (17) Formula (17) canbe represented as formula (18) where the torsional angularvibration and the maximum stress need to be optimizedConsider
min 1199102= 1198652 (119909) = 119908
11198911 (119909) + 119908
21198912 (119909)
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(18)
Here (1199081 1199082) is the weighting factor of 119891
1(119909) and 119891
2(119909)
Figures 16ndash18 show the biobject Pareto set of differentweight values Figure 19 shows the triobject Pareto set whichregards the mass the torsional angular vibration and themaximum stress over a period time as the optimization goal
In Figures 16ndash18 maximum stress increases with decreas-ing torsional angular vibration over a period time Pareto sethas changed with different weight values Appropriate weightvalue needs to be determined by the requirement of the actual
Mathematical Problems in Engineering 9
Table 3 Design variables and optimization results
Variables andresponse Initialization Upper bound Lower bound Deterministic
optimal resultsReliability
optimal results1199091mm 80 95 75 75 776
1199092mm 160 180 140 179 169
1199093mm 400 500 300 499 481
1199094mm 400 500 300 499 463
1199095mm 650 750 550 710 552
119898kg 846 mdash mdash 8388 8401
200 300 400 500 6000445
0455
0465
0475
0485
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 16 Pareto set with weight value (05 05)
200 300 400 500 6000435
0450
0465
0480
0495
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 17 Pareto set with weight value (02 08)
productionThen the Pareto set is obtained anddesigners canchoose the satisfactory optimization results
In Figure 19 the weight value is set to (1 1 1) The valuesof mass torsional angular vibration and maximum stressover a period time are expected to achieve an optimal resultHowever the paradoxical relationships are inevitably pro-duced because of the coupled interactionsThe improvement
200 300 400 500 600040
044
048
052
056
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 18 Pareto set with weight value (08 02)
200
400
600
8422
8414
8406
8398
8390
060
055
050
045
04
120579max (mm) 120590max (Mpa)
m(k
g)
Figure 19 Pareto set with three optimization objects
of one object is often at the expense of the decline of theother two Appropriate weight value needs to be determinedby the requirement of the actual productionThen the Paretoset is obtained and designers can choose the satisfactoryoptimization results
10 Mathematical Problems in Engineering
6 Conclusions
(1) The multidisciplinary optimization considering thecrankshaft modal torsional angular vibration max-imum stress over a period time and maximumload on the main bearings is operated on the basisof multi-island genetic algorithm which can effec-tively improve the comprehensive property of thecrankshaft
(2) The parallel computing in multidisciplinary opti-mization is operated on the basis of the combinationof elliptical basis function neural network theoryand cooptimization method which can enhance theoptimization efficiency so as to reduce product devel-opment cycle and costs
(3) During the design optimization process of thecrankshaft structure the reliability design is com-bined with the cooptimization method And theoptimization of the crankshaft is operated on the basisof multi-island genetic algorithm combined withdesign of experiment The optimization can not onlycontrol the system uncertainty but also ensure thereliability and robustness of the final optimal resultsof the crankshaft structure
Competing Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported by Open Fund (OGE201403-09) ofKey Laboratory of Oil amp Gas Equipment Ministry of Edu-cation (Southwest Petroleum University) and ([2014]506) ofMinistry of Industry and Information Technology (Manufac-ture of Marine High-Power Reciprocating Compressor)
References
[1] LMurawski andA Charchalis ldquoSimplifiedmethod of torsionalvibration calculation of marine power transmission systemrdquoMarine Structures vol 39 pp 335ndash349 2014
[2] Y Yilmaz and G Anlas ldquoAn investigation of the effect of coun-terweight configuration on main bearing load and crankshaftbending stressrdquoAdvances in Engineering Software vol 40 no 2pp 95ndash104 2009
[3] E Larralde and R Ocampo ldquoSelection of gas compressors part3rdquoWorld Pumps vol 2012 no 2 pp 36ndash41 2012
[4] E Larralde and R Ocampo ldquoSelection of gas compressors part1rdquoWorld Pumps vol 2011 no 5 pp 24ndash28 2011
[5] E Larralde and R Ocampo ldquoSelection of gas conpressors part2rdquoWorld Pumps no 539 pp 36ndash43 2011
[6] A Almasi ldquoReciprocating compressor optinmum design andmanufacturing with respect to performance reliability andcostrdquo Proceedings of World Academy of Science Engineering ampTechnolog vol 52 pp 48ndash53 2009
[7] A RHealth and PMMcNamara ldquoCrankshaft stress analysismdashcombination of finite element and classical analysis techniquesrdquo
Journal of Engineering for Gas Turbines and Power vol 112 no3 pp 268ndash275 1990
[8] M Rebbert R Lach and P Kley ldquoDynamic crankshaft stresscalculation using a combination of MSS and FEArdquo in Proceed-ings of the International ADAMS User Meeting Orlando FlaUSA 2000
[9] J Raub J Jones P Kley and M Rebbert ldquoAnalytical investiga-tion of crankshaft dynamics as a virtual engine modulerdquo SAETechnical Paper 1999-01-1750 1999
[10] NAWarrior A P Sime THHyde andH Fessler ldquoThedesignof overlapped crankshafts Part 1 crankpin filletsrdquo Proceedingsof the Institution of Mechanical Engineers Part D Journal ofAutomobile Engineering vol 215 no 4 pp 503ndash513 2001
[11] B-S Yang W-W Hwang D-J Kim and A C Tan ldquoConditionclassification of small reciprocating compressor for refrigeratorsusing artificial neural networks and support vector machinesrdquoMechanical Systems and Signal Processing vol 19 no 2 pp 371ndash390 2005
[12] E Benini ldquoThree-dimensional multi-objective design opti-mization of a transonic compressor rotorrdquo Journal of Propulsionand Power vol 20 no 3 pp 559ndash565 2004
[13] S Ho Y-L Lee H-T Kang and C J Wang ldquoOptimization of acrankshaft rolling process for durabilityrdquo International Journalof Fatigue vol 31 no 5 pp 799ndash808 2009
[14] S Kodiyalam R J Yang L Gu and C-H Tho ldquoMultidisci-plinary design optimization of a vehicle system in a scalablehigh performance computing environmentrdquo Structural andMultidisciplinary Optimization vol 26 no 3-4 pp 256ndash2632004
[15] A Messac and A Ismail-Yahaya ldquoMultiobjective robust designusing physical programmingrdquo Structural and MultidisciplinaryOptimization vol 23 no 5 pp 357ndash371 2002
[16] S Koetniyom P C Brooks andDC Barton ldquoThedevelopmentof a material model for cast iron that can be used for brakesystem analysisrdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 216no 5 pp 349ndash362 2002
[17] H Lu D Yu and Z Xie ldquoOptimization of vehicle disc brakesstability based on response surface methodrdquo Chinese Journal ofMechanical Engineering vol 49 no 9 pp 55ndash60 2013
[18] S Pierret R Filomeno Coelho and H Kato ldquoMultidisciplinaryand multiple operating points shape optimization of three-dimensional compressor bladesrdquo Structural and Multidisci-plinary Optimization vol 33 no 1 pp 61ndash70 2007
[19] S Rabeau P Depince and F Bennis ldquoCollaborative opti-mization of complex systems a multidisciplinary approachrdquoInternational Journal on Interactive Design and Manufacturingvol 1 no 4 pp 209ndash218 2007
[20] K Tamura D Peterson N Peterson G Stecher M Nei andS Kumar ldquoMEGA5 molecular evolutionary genetics analysisusing maximum likelihood evolutionary distance and max-imum parsimony methodsrdquo Molecular Biology and Evolutionvol 28 no 10 pp 2731ndash2739 2011
[21] A Ratnaweera S K Halgamuge and H C Watson ldquoSelf-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficientsrdquo IEEE Transactions on Evolu-tionary Computation vol 8 no 3 pp 240ndash255 2004
[22] M Dorigo and C Blum ldquoAnt colony optimization theory asurveyrdquoTheoretical Computer Science vol 344 no 2-3 pp 243ndash278 2005
Mathematical Problems in Engineering 11
[23] M Buhl and H Kabrede ldquoGeometries of transition-metalcomplexes from density-functional theoryrdquo Journal of ChemicalTheory and Computation vol 2 no 5 pp 1282ndash1290 2006
[24] J M Molero E M Garzon I Garcia and A Plaza ldquoAnalysisand optimizations of global and local versions of the RXalgorithm for anomaly detection in hyperspectral datardquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 6 no 2 pp 801ndash814 2013
[25] H Chen R Ooka and S Kato ldquoStudy on optimum designmethod for pleasant outdoor thermal environment usinggenetic algorithms (GA) and coupled simulation of convectionradiation and conductionrdquo Building and Environment vol 43no 1 pp 18ndash30 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
a multiobjective optimization algorithm in transonic com-pressor rotor structure and improved the pressure ratio Hoet al [13] improved the crankshaft reliability by Monte Carlosimulation on the basis of the finite element model Althoughthe algorithms mentioned earlier are effective in obtainingthe optimal solution comprehensive design is difficult toachieve by single discipline Therefore multidisciplinarydesign optimization (MDO) theory is necessary to achievethe comprehensive design of crankshaft [14 15]
Although multiple parameters affect the performance ofcompressor the amount of data obtained by compressorexperiment is limited The EBFNN theory is good at solvingsmall sample learning problems [16 17] Due to its strongability of nonlinear function approximation and excellentgeneralization capacity EBFNN has been widely used in thefield of industrial engineering
In this paper the coupling and interdisciplinary rela-tionships of mechanical properties NVH and lightweightare considered and the MDO technology roadmap of thereciprocating compressorwas proposed on the basis of virtualproving ground (VPG) technology Cooptimization based onEBFNN and multi-island genetic algorithm is applied to themultiobjective optimization of crankshaft structure in orderto gain the Pareto optimal solution set
2 MDO of the Crankshaft Structure
TheMDO theory is applied in crankshaft structure design onthe basis ofVPGTheflowchart of the enforceable technologyroadmap is shown in Figure 1
The crankshaft MDO issues mainly focus on the effectiveoptimization strategy to achieve concurrent design of multi-disciplinary subsystems and obtain the satisfactory solutionThe strategy combines the knowledge from different sub-jects with optimization algorithm and develops an effectivemethod to solve the complex problems [18 19]
The MDO optimization framework can be divided intosingle-stage and multiple-stage The single-stage optimiza-tion framework is composed of multidisciplinary feasiblemethod (MDF) and individual discipline feasible method(IDF) The multistage optimization framework consists ofconcurrent subspace optimization (CSSO) cooptimization(CO) and bilevel integrated (Bliss)
In this paper the CO ismainly studied CO is amultistageMDO algorithm on the basis of the optimization algorithmunder consistency constraints It divides the crankshaftMDO issues into one system-level optimization and multiplesubsystem-level optimization
The system-level optimization objective of crankshaft canbe expressed as
min 119865 (119885)
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(1)
The subsystem-level optimization objective of crankshaftis listed as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2+
1003816100381610038161003816119884119894 minus 119885119894
1003816100381610038161003816
2
Crank-shaft Link Cross-
head Piston Frame Support and
virtual environ-
mentMultibody systemsimulation model
Virtual prototypemodel of the compressor
Assemble
Modeling processof the compressor
Mechanicalproperties NVH Other
subsystems
Hierarchical structuralclassification of crankshaft
Designobjective
Designvariable
Designvariable
Multiobjectiveoptimization
on the basis of EBF
Multiobjectiveoptimization
on the basis of EBF
Optimal model
Coupling and interdisciplinaryrelationships of intersystem
Multidiscipline design optimization and analysis
Designobjective middot middot middot
middot middot middot
middot middot middot
Figure 1 MDO technology roadmap on the basis of VPG
st 119866119906 (119885) lt 0 119906 = 1 2 119901
119867V (119885) = 0 V = 1 2 119902
(2)
The meaning of the symbols in the formula is shown asfollows
119883119894 design variable of 119894 subsystem
119884119894 state variable of 119894 subsystem
119885119894 target expectation of system-level design variable
119865 system-level objective function
119869119894(119885) objective function of 119894 subsystem
119866119906(119885) inequality constraint of 119894 subsystem
119867V(119885) equality constraint of 119894 subsystem
119901 quantity of the corresponding function
119902 quantity of the corresponding function
120576 slack variable
Mathematical Problems in Engineering 3
3 Multiobjective OptimizationProblems and Solving
31 Multiobjective Optimization Problem Multiobjectiveoptimization problem (MOP) of crankshaft can be repre-sented as
min 119910 = 119865 (119909) = (1198911 (119909) 1198912 (119909) 119891119899 (119909))
st 119892119894 (119909) lt 0 119894 = 1 2 119897
ℎ119895 (119909) = 0 119895 = 1 2 119898
119909119871le 119909 le 119909
119880119909 = (119909
1 1199092 119909
119903) isin 119883
(3)
The meaning of the symbols in the formula is shown asfollows
119910 target vector which can represent the optimizationobjectives of mechanical properties NVH and othersubsystems of the crankshaft119892119894(119909) equality constraint of 119894 subsystem
ℎ119895(119909) equality constraint of 119894 subsystem
119909 decision vector119909119871 lower bound of decision vector
119909119880 upper bound of decision vector
119883 decision space formed by decision vector119897 quantity of the corresponding function119898 quantity of the corresponding function119899 quantity of the corresponding function119903 quantity of the corresponding function
With the given crankshaftMOP issue the Pareto optimalsolution can be defined as follows if and only if there exists nofeasible solution (119909
119861belongs to119883) which makes 119865(119909
119861) better
than 119865(119909119860) will 119909
119860belongs to119883 be one of the Pareto optimal
solutions Hence the optimal Pareto set can be represented as
119909119891
= 119909119860
isin 119883 | forall119909119861notin 119883 | 119865 (119909
119861) gt 119865 (119909
119860) (4)
Inevitably the MDO of the crankshaft is accompanied bythe MOP of the crankshaft MOP of the crankshaft cannotachieve best possible optimization of all objectives simultane-ously and arbitrary solution of Pareto set will possibly becomethe satisfactory solution
32 Solving of MOP The evaluation methods of MOP canbe divided into global optimization algorithms and localoptimization algorithmsThe global optimization algorithmsinclude genetic algorithm simulated annealing algorithmparticle swarm optimization and ant colony algorithm Dueto their high capability of global search high speeds of con-vergence and search results independent on starting pointthe global optimization algorithms are capable of solving highdimensional and nonlinear problems But the computationmight be expensive and sometimes unsatisfactory local opti-mization effect [20ndash22] The local optimization algorithmsinclude constraint algorithm weighting algorithm distance
Start
Island1
geneticevolution
Populationinitialization
Interislandmigration
Iterationstopping
End
MigrationYes
No
Production ofoffspring population
by crossover andmutation
Combination ofparents and
offspring individuals
Population ranksand crowding
distance calculation
Individual survivalowing to higher
fitness
Interisland process
Island2
geneticevolution
Island
geneticevolution
No
Yes
middot middot middotn
Figure 2 Flow chart of MIGA
function algorithm and gradient descent algorithmThe localoptimal optimization algorithms mentioned earlier have astrong ability in finding the local optimal solution but itis difficult to choose the starting point of high dimensionaland nonlinear problems [23 24] Hence multi-island geneticalgorithm is chosen to solve the application issue The multi-island algorithm can maintain optimal solution diversity andimprove the local optimization effect by interislandmigrationon the basis of traditional genetic algorithm [25] The flowchart of MIGA is shown in Figure 2
4 Multiobjective Optimization of Crankshaft
41 NVH Simulation of Crankshaft The modal analysis isan important part of dynamic analysis in reciprocatingcompressor machine system which can help us understandthe dynamic characteristic of the system The natural fre-quency of crankshaft is usually calculated to avoid resonancesduring use in the design of NVH Severe deforming partsof crankshaft are observed to judge the strength of thecorresponding structure which may become noise vibrationsource or main transfer path and should be modified early
There are 269612 entity units and 452154 nodes on thefinite element model of crankshaft NVH The characteristicof NVH is studied by crankshaftmodal analysis and torsionalvibration
The crankshaft modal is computed by ANSYS underfree boundary Therefore the first-order natural frequency is41413Hz The second-order natural frequency is 4354Hz
In the process of the torsional vibration analysis themodal superpositionmethod is used to simplify the finite ele-ment of crankshaft The elastic deformation of the structureis solved approximately by linear combination of suitablemodes which can be shown as follows
[119906] = [120593] [119902] (5)
4 Mathematical Problems in Engineering
The meaning of the symbols in the formula is shown asfollows
[119906] displacement matrix[120593] modal shape function matrix[119902] vector of modal coordinates
An elastic body contains two types of nodes interfacenodes where forces and boundary conditions interact withthe structure during multibody system simulation (MSS)and interior nodes In MSS the position of the elastic bodyis computed by superposing its rigid body motion andelastic deformation In ADAMS this is performed usingldquoComponent Mode Synthesisrdquo technique based on Craig-Bampton method [8 9] The component modes containstatic and dynamic behavior of the structure The modaltransformation between the physical DOF and the Craig-Bampton modes and their modal coordinates is described by[2]
[119906] =
119906119861
1199061
= [
119868 0
120593119862
120593119873
]
119902119862
119902119873
(6)
The meaning of the symbols in the formula is shown asfollows
119906119861 column vectors of boundary DOF
1199061 column vectors of interior DOF
119868 identity matrix0 zero matrix120593119862 matrix of physical displacements of the interior
DOF in the constraint modes120593119873 matrix of physical displacements of the interior
DOF in the normal modes119902119862 column vector of modal coordinates of the con-
straint modes119902119873 column vector of modal coordinates of the fixed
boundary normal modes
To obtain decoupled set ofmodes constrainedmodes andnormal modes are orthogonalized
The crankshaft systemmodel is shown in Figure 3 Elastic3D solid crankshaft model of reciprocating compressor isobtained inANSYS usingmodal superpositionmethod First3D solid model of the crankshaft is imported to ANSYS andfinite element model of the crankshaft is obtained Flexiblecrankshaft model is obtained through modal synthesis con-sidering the first 30 fixed boundary normalmodesThen thismodel is imported to ADAMSView and 3D finite elementmodel is run with ADAMS
42 Strength of Crankshaft The boundary condition ofcrankshaft strength analysis is shown in Figure 4 The radialand axial freedom of main bearings from A to F areconstrained Forces in a reciprocating compressor can bedivided into gas forces piston lateral impact forces andinertia forces The gas forces are applied on the prismatic
xy
z
Figure 3 Model of crankshaft system
⑤
I II III IV V VI
⑥④① ② ③
Figure 4 Boundary condition of crankshaft strength analysis
pairs of pistonThen excitation force and torque acted on thecrankpin from I to VI are obtained byMSS In the calculationexample the rotate speed of crankshaft is set to 994 rmin themanifold pressure is set to 20Mpa and the exhaust pressureis set to 60Mpa The type of cylinder is double-acting
5 Multidisciplinary Optimization ofCrankshaft
The deterministic optimization reliability optimization andmultiobjective optimization are operated independently onthe basis of EBFNN andCOThe flow chart ofMDO is shownin Figure 5
51 System Decomposition Systems in crankshaft structurecan be divided into mass NVH and strength subsystemThe NVH subsystem includes modal analysis and torsionalvibration
52 Design Variable The structure of crankshaft system hasan important effect on the torsional vibration strengthnatural frequency and mass of crankshaft As the crankshaftis constrained by the dimension and assembly of connectingrod frame and other parts the dimension of crank journalscrankpins and bore spacing cannot be changed in thiscalculation example Consequently transitional fillet (119909
1)
oil passage (1199092) and shape parameters of lightening holes
(1199093 1199094 1199095) are chosen as the design variables which is shown
in Figure 6
53 Experiment Design Opt-LHD is adopted to obtain theexperimental scheme and perform data sampling The ellip-tical basis function neural network (EBFNN) model con-sidering modal frequency static strength torsional vibration
Mathematical Problems in Engineering 5
System decomposition
Experiment design
Satisfyingprecision
Single-objectoptimization
End
No
Multiobjectoptimization
A set of sampleddata given by
experiment design
Disciplinaryanalysis 1
Training
Establishment of EBF
Consideringuncertainty
Reliabilityoptimization
Deterministicoptimization
Convergence
Pareto set
Select optimalsolution
Meetrequirement
Yes
Yes
YesNo
No
Yes
No
YesNo
Disciplinary
Disciplinaryanalysis 1
Disciplinaryanalysis n
analysis nmiddot middot middot
middot middot middot
Figure 5 Flow chart of crankshaft system MDO
Oil passage x2
Lightening holes
Transitional fillet x1
x3 x4 x5
Figure 6 Design variables of MDO
angular displacement and lightweight design of crankshaft isbuilt The experimental scheme is listed in Table 1
Targets in NVH subsystem include first-order modalfrequency (119891
1) second-order modal frequency (119891
2) and the
maximum torsional angular vibration over a period time(120579max) Targets in strength subsystem include the maximumload on the main bearing over a period (119865
1 1198652 1198653 1198654 1198655 1198656)
0 4 8 12 16 20838
840
842
844
846
Sample n
Cran
ksha
ft m
assm
(kg)
Figure 7 Result of crankshaft mass
Table 1 Experimental scheme based on Opt-LHD
SampleDesign variables
1199091
1199092
1199093
1199094
1199095
mm mm mm mm mm1 918 1653 4684 3842 7502 782 1463 4053 3526 72893 761 1674 3105 4053 65534 771 1758 4579 3947 70795 887 1484 4263 4158 5506 834 1568 500 3316 63427 75 1547 4474 4579 60268 897 180 3421 4368 68689 939 1737 4368 3421 613210 845 1632 3316 500 571111 866 1421 4895 4474 697412 908 1611 300 3632 592413 855 1695 3526 300 718414 95 1526 3737 4684 665815 803 1779 4158 3737 560516 929 1442 3947 3211 676317 792 1505 3632 3105 581618 824 140 3211 4263 644719 876 1716 4789 4789 623720 813 1589 3842 4895 7395
and the maximum stress over a period time (120590max) Mass ofthe crankshaft (119898) is the target of the mass subsystem
The time of training is set to 20 based on the parallelcomputing The result is listed from Figures 7ndash11
54 Surrogate Model Each response is mapped to ellipticalbasis function surrogate model on the theory of the ellipticalbasis function neural network It is shown in Figure 12
6 Mathematical Problems in EngineeringN
atur
al fr
eque
ncy
(Hz)
0 4 8 12 16 20410
417
424
431
438
Sample n
f2
f1
Figure 8 Result of modal frequency
0 4 8 12 16 20Sample n
08
07
06
05
04
Tors
iona
l ang
ular
vib
ratio
n120579
max
(∘)
Figure 9 Result of themaximumof torsional angular vibration overa period time
0 4 8 12 16 20400
600
800
1000
1200
Max
imum
stre
ss120590
max
(Mpa
)
Sample n
Figure 10 Result of the maximum stress over a period time
0 4 8 12 16 20110
119
128
137
146
Mai
n be
arin
g lo
ad (k
N)
F1 F2F3F4
F5 F6
Sample n
Figure 11 Result of main bearing load over a period time
n
Fiveinfluence
factorsof
crankshaft
1
2Surrogate
modelof
eachtarget
Input Output
Hidden-layer
y1
y2
ym
x1
xh
Figure 12 EBFNN model of crankshaft
The elliptical basis function neural network includingℎ input parameters 119899 hidden-layer nodes and 119898 outputparameters can be described by
119910119898 (119883) =
119899
sum
119894=1
[120572119898119894V119894 (119909)] + 120572
119898(119899+1) (7)
The meaning of the symbols in the formula is shown asfollows
119909 design variable120572119898119894 link weight between 119894th hidden-layer node and
119898th output parameterV119894(119909) base function by using Mahalanobis distance
which can be described by
V119894 (119909) = (119909 minus 119909
119894)119879119878minus1
(119909 minus 119909119894) (8)
The meaning of the symbols in the formula is shown asfollows
119878 covariance matrix which can be described by
119878 =1
119899
119899
sum
119894=1
(119909119894minus 120583) (119909
119894minus 120583)119879 (9)
Here 120583 is the sample data center
Mathematical Problems in Engineering 7
1416
18
09
085
08
075
07
065
Variable x2 (mm)
959
858
75 Variable x1(mm)
086
084
082
08
078
076
074
072
07
068
Mas
sm(k
g)
Figure 13 Response surface of mass normalization
Having gained output responses 119910 = (119910(1)
119910(1)
119910(119899)
0) corresponding to 119899 samples the connection matrixcan be described by the following
120572 =
[[[[[[
[
[[[[
[
V1(1199091) sdot sdot sdot V
1(119909119899)
d
V119899(1199091) sdot sdot sdot V
119899(119909119899)
]]]]
]
1
1 0
]]]]]]
]
119910 (10)
The tan-sigmoid function is used in this neural networkHence ideal output results should be close or equal to 1 Thenormalization processing of experiment data is carried outwhich can be described by
119884119894= 01 + 08 times
119910119894minus 119910119894min
119910119894max minus 119910
119894min (11)
The meaning of the symbols in the formula is shown asfollows
119884119894 output values of normalization neural network
119910119894 experimental data
119910119894min the minimum experimental data
119910119894max the maximum experimental data
The elliptical basis function surrogate model betweendesign variables and its analysis target can be solved com-bining formulas (6) to (11) The response surface of masstorsional angular vibration and the maximum stress areplotted in Figures 13ndash15
As the elliptical basis function surrogate model betweeninput variables and its analysis targets cannot be describedby a specific function correlation coefficients (1198772) are usedto evaluate the degree of approximation between eachmodelThe better the fitting of the surrogate model is the closer the1198772 is to 1 The correlation coefficients can be described by
1198772= 1 minus
sum119899
119894=1(119910119894minus 119884)2
sum119899
119894=1(119910119894minus 119910)2 (12)
1416
18
The m
axim
um st
ress120590
max 1
08
06
04
02
Variable x2 (mm)
959
858
75 Variable x1(mm)
08
07
06
05
04
03
Figure 14 Response surface of the maximum stress normalization
1416
18
Tors
iona
l ang
ular
vibr
atio
n120579
07
065
06
055
05
Variable x2 (mm)
959
858
75Variable x1
(mm)
064
063
062
061
06
059
058
057
056
055
054
Figure 15 Response surface of torsional angular vibration normal-ization
The meaning of the symbols in the formula is shown asfollows
119910 average of sample response
119899 experiments
The fitting of the surrogate model can be solved by for-mula (11) and formula (12) The correlation coefficient valuesof the elliptical basis function surrogatemodel correspondingto crankshaftmass torsional angular vibration and themaxi-mum stress over a period time aremore than 090The resultsshow that the surrogate model of the elliptical function cantruly reflect function mapping between design variable andanalysis objective The approximate model corresponding todesign variable is precise and can be used for optimization
55 Single-Object Lightweight Optimization of CrankshaftThe deterministic system-level optimization objective can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(13)
8 Mathematical Problems in Engineering
The deterministic subsystem-level optimization objectivecan be represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 120590max lt [120590]
120579max le [120579]
119865119894le 1198651198940
119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(14)
The meaning of the symbols in the formula is shown asfollows
120576 10minus5[120579] allowable torsional angular vibration[120590] allowable stress119883119895 design variable of crankshaft 119895 = 1 2 3 4 5
119909119895L lower bound of design variable
119909119895U upper bound of design variable
1198651198940 initial maximum load on main bearing over a
period time 119894 = 1 2 3 4 5 6
In the design of crankshaft structure system uncertaintyis caused by various factors such as structure parameterssystem forecastmodel sampling technology judgments crite-rion and human factors Accordingly reliability optimizationis adopted to control and eliminate system uncertainty
The reliability system-level optimization model can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(15)
The reliability subsystem-level optimization objective canbe represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 119875 [120590max lt [120590]] minus Φ (120573) le 0
119875 [120579max le [120579]] minus Φ (120573) le 0
119875 [119865119894le 1198651198940] minus Φ (120573) le 0 119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(16)
The meaning of the symbols in the formula is shown asfollows
119875(∙) probability of failure constrains120573 reliability indexΦ(120573) first-order estimate of reliability which obeysthe normal distribution
The determined optimization and reliability optimizationare operated independently on the basis of MIGA Theadvanced options of MIGA are listed in Table 2
Table 2 Advanced options of MIGA
Options Parameter settingSubpopulation size 20Number of islands 10Number of generations 50Rate of crossover 08Rate of mutation 00075Rate of migration 025Interval of migration 5Relative tournament size 05Elite 10
The initialization range and optimization results of eachdesign variable are listed in Table 3
The optimization results show that the weight of thecrankshaft is reduced 72 kg which accounts for 085 ofthe initial mass However the uncertain factors are notconsidered The weight of the structure is reduced 59 kgthrough reliability optimization The reliability optimizationcan not only achieve the lightweight of the crankshaft butalso ensure the reliability and robustness in engineeringquality
56 Multiobjective Optimization of MDO of Crankshaft Struc-ture According to formula (3) multiobjective optimizationproblem can be represented as
min 119910 = 119865 (119909) = (1198911 (119909) 1198912 (119909) 119891119899 (119909))
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(17)
Here 119891119894(119909) (119894 = 1 2 119899) is the analysis target of
designer which can represent crankshaft mass first-ordermodal frequency second-order modal frequency torsionalangular vibration the maximum stress over a period time orthe maximummain bearing load over a period time
The range of the design variables and the optimizationobjectives need to be determined by actual production MOPcan be defined as tree-objective optimization when there aretwo optimization objectives in formula (17) Formula (17) canbe represented as formula (18) where the torsional angularvibration and the maximum stress need to be optimizedConsider
min 1199102= 1198652 (119909) = 119908
11198911 (119909) + 119908
21198912 (119909)
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(18)
Here (1199081 1199082) is the weighting factor of 119891
1(119909) and 119891
2(119909)
Figures 16ndash18 show the biobject Pareto set of differentweight values Figure 19 shows the triobject Pareto set whichregards the mass the torsional angular vibration and themaximum stress over a period time as the optimization goal
In Figures 16ndash18 maximum stress increases with decreas-ing torsional angular vibration over a period time Pareto sethas changed with different weight values Appropriate weightvalue needs to be determined by the requirement of the actual
Mathematical Problems in Engineering 9
Table 3 Design variables and optimization results
Variables andresponse Initialization Upper bound Lower bound Deterministic
optimal resultsReliability
optimal results1199091mm 80 95 75 75 776
1199092mm 160 180 140 179 169
1199093mm 400 500 300 499 481
1199094mm 400 500 300 499 463
1199095mm 650 750 550 710 552
119898kg 846 mdash mdash 8388 8401
200 300 400 500 6000445
0455
0465
0475
0485
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 16 Pareto set with weight value (05 05)
200 300 400 500 6000435
0450
0465
0480
0495
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 17 Pareto set with weight value (02 08)
productionThen the Pareto set is obtained anddesigners canchoose the satisfactory optimization results
In Figure 19 the weight value is set to (1 1 1) The valuesof mass torsional angular vibration and maximum stressover a period time are expected to achieve an optimal resultHowever the paradoxical relationships are inevitably pro-duced because of the coupled interactionsThe improvement
200 300 400 500 600040
044
048
052
056
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 18 Pareto set with weight value (08 02)
200
400
600
8422
8414
8406
8398
8390
060
055
050
045
04
120579max (mm) 120590max (Mpa)
m(k
g)
Figure 19 Pareto set with three optimization objects
of one object is often at the expense of the decline of theother two Appropriate weight value needs to be determinedby the requirement of the actual productionThen the Paretoset is obtained and designers can choose the satisfactoryoptimization results
10 Mathematical Problems in Engineering
6 Conclusions
(1) The multidisciplinary optimization considering thecrankshaft modal torsional angular vibration max-imum stress over a period time and maximumload on the main bearings is operated on the basisof multi-island genetic algorithm which can effec-tively improve the comprehensive property of thecrankshaft
(2) The parallel computing in multidisciplinary opti-mization is operated on the basis of the combinationof elliptical basis function neural network theoryand cooptimization method which can enhance theoptimization efficiency so as to reduce product devel-opment cycle and costs
(3) During the design optimization process of thecrankshaft structure the reliability design is com-bined with the cooptimization method And theoptimization of the crankshaft is operated on the basisof multi-island genetic algorithm combined withdesign of experiment The optimization can not onlycontrol the system uncertainty but also ensure thereliability and robustness of the final optimal resultsof the crankshaft structure
Competing Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported by Open Fund (OGE201403-09) ofKey Laboratory of Oil amp Gas Equipment Ministry of Edu-cation (Southwest Petroleum University) and ([2014]506) ofMinistry of Industry and Information Technology (Manufac-ture of Marine High-Power Reciprocating Compressor)
References
[1] LMurawski andA Charchalis ldquoSimplifiedmethod of torsionalvibration calculation of marine power transmission systemrdquoMarine Structures vol 39 pp 335ndash349 2014
[2] Y Yilmaz and G Anlas ldquoAn investigation of the effect of coun-terweight configuration on main bearing load and crankshaftbending stressrdquoAdvances in Engineering Software vol 40 no 2pp 95ndash104 2009
[3] E Larralde and R Ocampo ldquoSelection of gas compressors part3rdquoWorld Pumps vol 2012 no 2 pp 36ndash41 2012
[4] E Larralde and R Ocampo ldquoSelection of gas compressors part1rdquoWorld Pumps vol 2011 no 5 pp 24ndash28 2011
[5] E Larralde and R Ocampo ldquoSelection of gas conpressors part2rdquoWorld Pumps no 539 pp 36ndash43 2011
[6] A Almasi ldquoReciprocating compressor optinmum design andmanufacturing with respect to performance reliability andcostrdquo Proceedings of World Academy of Science Engineering ampTechnolog vol 52 pp 48ndash53 2009
[7] A RHealth and PMMcNamara ldquoCrankshaft stress analysismdashcombination of finite element and classical analysis techniquesrdquo
Journal of Engineering for Gas Turbines and Power vol 112 no3 pp 268ndash275 1990
[8] M Rebbert R Lach and P Kley ldquoDynamic crankshaft stresscalculation using a combination of MSS and FEArdquo in Proceed-ings of the International ADAMS User Meeting Orlando FlaUSA 2000
[9] J Raub J Jones P Kley and M Rebbert ldquoAnalytical investiga-tion of crankshaft dynamics as a virtual engine modulerdquo SAETechnical Paper 1999-01-1750 1999
[10] NAWarrior A P Sime THHyde andH Fessler ldquoThedesignof overlapped crankshafts Part 1 crankpin filletsrdquo Proceedingsof the Institution of Mechanical Engineers Part D Journal ofAutomobile Engineering vol 215 no 4 pp 503ndash513 2001
[11] B-S Yang W-W Hwang D-J Kim and A C Tan ldquoConditionclassification of small reciprocating compressor for refrigeratorsusing artificial neural networks and support vector machinesrdquoMechanical Systems and Signal Processing vol 19 no 2 pp 371ndash390 2005
[12] E Benini ldquoThree-dimensional multi-objective design opti-mization of a transonic compressor rotorrdquo Journal of Propulsionand Power vol 20 no 3 pp 559ndash565 2004
[13] S Ho Y-L Lee H-T Kang and C J Wang ldquoOptimization of acrankshaft rolling process for durabilityrdquo International Journalof Fatigue vol 31 no 5 pp 799ndash808 2009
[14] S Kodiyalam R J Yang L Gu and C-H Tho ldquoMultidisci-plinary design optimization of a vehicle system in a scalablehigh performance computing environmentrdquo Structural andMultidisciplinary Optimization vol 26 no 3-4 pp 256ndash2632004
[15] A Messac and A Ismail-Yahaya ldquoMultiobjective robust designusing physical programmingrdquo Structural and MultidisciplinaryOptimization vol 23 no 5 pp 357ndash371 2002
[16] S Koetniyom P C Brooks andDC Barton ldquoThedevelopmentof a material model for cast iron that can be used for brakesystem analysisrdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 216no 5 pp 349ndash362 2002
[17] H Lu D Yu and Z Xie ldquoOptimization of vehicle disc brakesstability based on response surface methodrdquo Chinese Journal ofMechanical Engineering vol 49 no 9 pp 55ndash60 2013
[18] S Pierret R Filomeno Coelho and H Kato ldquoMultidisciplinaryand multiple operating points shape optimization of three-dimensional compressor bladesrdquo Structural and Multidisci-plinary Optimization vol 33 no 1 pp 61ndash70 2007
[19] S Rabeau P Depince and F Bennis ldquoCollaborative opti-mization of complex systems a multidisciplinary approachrdquoInternational Journal on Interactive Design and Manufacturingvol 1 no 4 pp 209ndash218 2007
[20] K Tamura D Peterson N Peterson G Stecher M Nei andS Kumar ldquoMEGA5 molecular evolutionary genetics analysisusing maximum likelihood evolutionary distance and max-imum parsimony methodsrdquo Molecular Biology and Evolutionvol 28 no 10 pp 2731ndash2739 2011
[21] A Ratnaweera S K Halgamuge and H C Watson ldquoSelf-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficientsrdquo IEEE Transactions on Evolu-tionary Computation vol 8 no 3 pp 240ndash255 2004
[22] M Dorigo and C Blum ldquoAnt colony optimization theory asurveyrdquoTheoretical Computer Science vol 344 no 2-3 pp 243ndash278 2005
Mathematical Problems in Engineering 11
[23] M Buhl and H Kabrede ldquoGeometries of transition-metalcomplexes from density-functional theoryrdquo Journal of ChemicalTheory and Computation vol 2 no 5 pp 1282ndash1290 2006
[24] J M Molero E M Garzon I Garcia and A Plaza ldquoAnalysisand optimizations of global and local versions of the RXalgorithm for anomaly detection in hyperspectral datardquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 6 no 2 pp 801ndash814 2013
[25] H Chen R Ooka and S Kato ldquoStudy on optimum designmethod for pleasant outdoor thermal environment usinggenetic algorithms (GA) and coupled simulation of convectionradiation and conductionrdquo Building and Environment vol 43no 1 pp 18ndash30 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
3 Multiobjective OptimizationProblems and Solving
31 Multiobjective Optimization Problem Multiobjectiveoptimization problem (MOP) of crankshaft can be repre-sented as
min 119910 = 119865 (119909) = (1198911 (119909) 1198912 (119909) 119891119899 (119909))
st 119892119894 (119909) lt 0 119894 = 1 2 119897
ℎ119895 (119909) = 0 119895 = 1 2 119898
119909119871le 119909 le 119909
119880119909 = (119909
1 1199092 119909
119903) isin 119883
(3)
The meaning of the symbols in the formula is shown asfollows
119910 target vector which can represent the optimizationobjectives of mechanical properties NVH and othersubsystems of the crankshaft119892119894(119909) equality constraint of 119894 subsystem
ℎ119895(119909) equality constraint of 119894 subsystem
119909 decision vector119909119871 lower bound of decision vector
119909119880 upper bound of decision vector
119883 decision space formed by decision vector119897 quantity of the corresponding function119898 quantity of the corresponding function119899 quantity of the corresponding function119903 quantity of the corresponding function
With the given crankshaftMOP issue the Pareto optimalsolution can be defined as follows if and only if there exists nofeasible solution (119909
119861belongs to119883) which makes 119865(119909
119861) better
than 119865(119909119860) will 119909
119860belongs to119883 be one of the Pareto optimal
solutions Hence the optimal Pareto set can be represented as
119909119891
= 119909119860
isin 119883 | forall119909119861notin 119883 | 119865 (119909
119861) gt 119865 (119909
119860) (4)
Inevitably the MDO of the crankshaft is accompanied bythe MOP of the crankshaft MOP of the crankshaft cannotachieve best possible optimization of all objectives simultane-ously and arbitrary solution of Pareto set will possibly becomethe satisfactory solution
32 Solving of MOP The evaluation methods of MOP canbe divided into global optimization algorithms and localoptimization algorithmsThe global optimization algorithmsinclude genetic algorithm simulated annealing algorithmparticle swarm optimization and ant colony algorithm Dueto their high capability of global search high speeds of con-vergence and search results independent on starting pointthe global optimization algorithms are capable of solving highdimensional and nonlinear problems But the computationmight be expensive and sometimes unsatisfactory local opti-mization effect [20ndash22] The local optimization algorithmsinclude constraint algorithm weighting algorithm distance
Start
Island1
geneticevolution
Populationinitialization
Interislandmigration
Iterationstopping
End
MigrationYes
No
Production ofoffspring population
by crossover andmutation
Combination ofparents and
offspring individuals
Population ranksand crowding
distance calculation
Individual survivalowing to higher
fitness
Interisland process
Island2
geneticevolution
Island
geneticevolution
No
Yes
middot middot middotn
Figure 2 Flow chart of MIGA
function algorithm and gradient descent algorithmThe localoptimal optimization algorithms mentioned earlier have astrong ability in finding the local optimal solution but itis difficult to choose the starting point of high dimensionaland nonlinear problems [23 24] Hence multi-island geneticalgorithm is chosen to solve the application issue The multi-island algorithm can maintain optimal solution diversity andimprove the local optimization effect by interislandmigrationon the basis of traditional genetic algorithm [25] The flowchart of MIGA is shown in Figure 2
4 Multiobjective Optimization of Crankshaft
41 NVH Simulation of Crankshaft The modal analysis isan important part of dynamic analysis in reciprocatingcompressor machine system which can help us understandthe dynamic characteristic of the system The natural fre-quency of crankshaft is usually calculated to avoid resonancesduring use in the design of NVH Severe deforming partsof crankshaft are observed to judge the strength of thecorresponding structure which may become noise vibrationsource or main transfer path and should be modified early
There are 269612 entity units and 452154 nodes on thefinite element model of crankshaft NVH The characteristicof NVH is studied by crankshaftmodal analysis and torsionalvibration
The crankshaft modal is computed by ANSYS underfree boundary Therefore the first-order natural frequency is41413Hz The second-order natural frequency is 4354Hz
In the process of the torsional vibration analysis themodal superpositionmethod is used to simplify the finite ele-ment of crankshaft The elastic deformation of the structureis solved approximately by linear combination of suitablemodes which can be shown as follows
[119906] = [120593] [119902] (5)
4 Mathematical Problems in Engineering
The meaning of the symbols in the formula is shown asfollows
[119906] displacement matrix[120593] modal shape function matrix[119902] vector of modal coordinates
An elastic body contains two types of nodes interfacenodes where forces and boundary conditions interact withthe structure during multibody system simulation (MSS)and interior nodes In MSS the position of the elastic bodyis computed by superposing its rigid body motion andelastic deformation In ADAMS this is performed usingldquoComponent Mode Synthesisrdquo technique based on Craig-Bampton method [8 9] The component modes containstatic and dynamic behavior of the structure The modaltransformation between the physical DOF and the Craig-Bampton modes and their modal coordinates is described by[2]
[119906] =
119906119861
1199061
= [
119868 0
120593119862
120593119873
]
119902119862
119902119873
(6)
The meaning of the symbols in the formula is shown asfollows
119906119861 column vectors of boundary DOF
1199061 column vectors of interior DOF
119868 identity matrix0 zero matrix120593119862 matrix of physical displacements of the interior
DOF in the constraint modes120593119873 matrix of physical displacements of the interior
DOF in the normal modes119902119862 column vector of modal coordinates of the con-
straint modes119902119873 column vector of modal coordinates of the fixed
boundary normal modes
To obtain decoupled set ofmodes constrainedmodes andnormal modes are orthogonalized
The crankshaft systemmodel is shown in Figure 3 Elastic3D solid crankshaft model of reciprocating compressor isobtained inANSYS usingmodal superpositionmethod First3D solid model of the crankshaft is imported to ANSYS andfinite element model of the crankshaft is obtained Flexiblecrankshaft model is obtained through modal synthesis con-sidering the first 30 fixed boundary normalmodesThen thismodel is imported to ADAMSView and 3D finite elementmodel is run with ADAMS
42 Strength of Crankshaft The boundary condition ofcrankshaft strength analysis is shown in Figure 4 The radialand axial freedom of main bearings from A to F areconstrained Forces in a reciprocating compressor can bedivided into gas forces piston lateral impact forces andinertia forces The gas forces are applied on the prismatic
xy
z
Figure 3 Model of crankshaft system
⑤
I II III IV V VI
⑥④① ② ③
Figure 4 Boundary condition of crankshaft strength analysis
pairs of pistonThen excitation force and torque acted on thecrankpin from I to VI are obtained byMSS In the calculationexample the rotate speed of crankshaft is set to 994 rmin themanifold pressure is set to 20Mpa and the exhaust pressureis set to 60Mpa The type of cylinder is double-acting
5 Multidisciplinary Optimization ofCrankshaft
The deterministic optimization reliability optimization andmultiobjective optimization are operated independently onthe basis of EBFNN andCOThe flow chart ofMDO is shownin Figure 5
51 System Decomposition Systems in crankshaft structurecan be divided into mass NVH and strength subsystemThe NVH subsystem includes modal analysis and torsionalvibration
52 Design Variable The structure of crankshaft system hasan important effect on the torsional vibration strengthnatural frequency and mass of crankshaft As the crankshaftis constrained by the dimension and assembly of connectingrod frame and other parts the dimension of crank journalscrankpins and bore spacing cannot be changed in thiscalculation example Consequently transitional fillet (119909
1)
oil passage (1199092) and shape parameters of lightening holes
(1199093 1199094 1199095) are chosen as the design variables which is shown
in Figure 6
53 Experiment Design Opt-LHD is adopted to obtain theexperimental scheme and perform data sampling The ellip-tical basis function neural network (EBFNN) model con-sidering modal frequency static strength torsional vibration
Mathematical Problems in Engineering 5
System decomposition
Experiment design
Satisfyingprecision
Single-objectoptimization
End
No
Multiobjectoptimization
A set of sampleddata given by
experiment design
Disciplinaryanalysis 1
Training
Establishment of EBF
Consideringuncertainty
Reliabilityoptimization
Deterministicoptimization
Convergence
Pareto set
Select optimalsolution
Meetrequirement
Yes
Yes
YesNo
No
Yes
No
YesNo
Disciplinary
Disciplinaryanalysis 1
Disciplinaryanalysis n
analysis nmiddot middot middot
middot middot middot
Figure 5 Flow chart of crankshaft system MDO
Oil passage x2
Lightening holes
Transitional fillet x1
x3 x4 x5
Figure 6 Design variables of MDO
angular displacement and lightweight design of crankshaft isbuilt The experimental scheme is listed in Table 1
Targets in NVH subsystem include first-order modalfrequency (119891
1) second-order modal frequency (119891
2) and the
maximum torsional angular vibration over a period time(120579max) Targets in strength subsystem include the maximumload on the main bearing over a period (119865
1 1198652 1198653 1198654 1198655 1198656)
0 4 8 12 16 20838
840
842
844
846
Sample n
Cran
ksha
ft m
assm
(kg)
Figure 7 Result of crankshaft mass
Table 1 Experimental scheme based on Opt-LHD
SampleDesign variables
1199091
1199092
1199093
1199094
1199095
mm mm mm mm mm1 918 1653 4684 3842 7502 782 1463 4053 3526 72893 761 1674 3105 4053 65534 771 1758 4579 3947 70795 887 1484 4263 4158 5506 834 1568 500 3316 63427 75 1547 4474 4579 60268 897 180 3421 4368 68689 939 1737 4368 3421 613210 845 1632 3316 500 571111 866 1421 4895 4474 697412 908 1611 300 3632 592413 855 1695 3526 300 718414 95 1526 3737 4684 665815 803 1779 4158 3737 560516 929 1442 3947 3211 676317 792 1505 3632 3105 581618 824 140 3211 4263 644719 876 1716 4789 4789 623720 813 1589 3842 4895 7395
and the maximum stress over a period time (120590max) Mass ofthe crankshaft (119898) is the target of the mass subsystem
The time of training is set to 20 based on the parallelcomputing The result is listed from Figures 7ndash11
54 Surrogate Model Each response is mapped to ellipticalbasis function surrogate model on the theory of the ellipticalbasis function neural network It is shown in Figure 12
6 Mathematical Problems in EngineeringN
atur
al fr
eque
ncy
(Hz)
0 4 8 12 16 20410
417
424
431
438
Sample n
f2
f1
Figure 8 Result of modal frequency
0 4 8 12 16 20Sample n
08
07
06
05
04
Tors
iona
l ang
ular
vib
ratio
n120579
max
(∘)
Figure 9 Result of themaximumof torsional angular vibration overa period time
0 4 8 12 16 20400
600
800
1000
1200
Max
imum
stre
ss120590
max
(Mpa
)
Sample n
Figure 10 Result of the maximum stress over a period time
0 4 8 12 16 20110
119
128
137
146
Mai
n be
arin
g lo
ad (k
N)
F1 F2F3F4
F5 F6
Sample n
Figure 11 Result of main bearing load over a period time
n
Fiveinfluence
factorsof
crankshaft
1
2Surrogate
modelof
eachtarget
Input Output
Hidden-layer
y1
y2
ym
x1
xh
Figure 12 EBFNN model of crankshaft
The elliptical basis function neural network includingℎ input parameters 119899 hidden-layer nodes and 119898 outputparameters can be described by
119910119898 (119883) =
119899
sum
119894=1
[120572119898119894V119894 (119909)] + 120572
119898(119899+1) (7)
The meaning of the symbols in the formula is shown asfollows
119909 design variable120572119898119894 link weight between 119894th hidden-layer node and
119898th output parameterV119894(119909) base function by using Mahalanobis distance
which can be described by
V119894 (119909) = (119909 minus 119909
119894)119879119878minus1
(119909 minus 119909119894) (8)
The meaning of the symbols in the formula is shown asfollows
119878 covariance matrix which can be described by
119878 =1
119899
119899
sum
119894=1
(119909119894minus 120583) (119909
119894minus 120583)119879 (9)
Here 120583 is the sample data center
Mathematical Problems in Engineering 7
1416
18
09
085
08
075
07
065
Variable x2 (mm)
959
858
75 Variable x1(mm)
086
084
082
08
078
076
074
072
07
068
Mas
sm(k
g)
Figure 13 Response surface of mass normalization
Having gained output responses 119910 = (119910(1)
119910(1)
119910(119899)
0) corresponding to 119899 samples the connection matrixcan be described by the following
120572 =
[[[[[[
[
[[[[
[
V1(1199091) sdot sdot sdot V
1(119909119899)
d
V119899(1199091) sdot sdot sdot V
119899(119909119899)
]]]]
]
1
1 0
]]]]]]
]
119910 (10)
The tan-sigmoid function is used in this neural networkHence ideal output results should be close or equal to 1 Thenormalization processing of experiment data is carried outwhich can be described by
119884119894= 01 + 08 times
119910119894minus 119910119894min
119910119894max minus 119910
119894min (11)
The meaning of the symbols in the formula is shown asfollows
119884119894 output values of normalization neural network
119910119894 experimental data
119910119894min the minimum experimental data
119910119894max the maximum experimental data
The elliptical basis function surrogate model betweendesign variables and its analysis target can be solved com-bining formulas (6) to (11) The response surface of masstorsional angular vibration and the maximum stress areplotted in Figures 13ndash15
As the elliptical basis function surrogate model betweeninput variables and its analysis targets cannot be describedby a specific function correlation coefficients (1198772) are usedto evaluate the degree of approximation between eachmodelThe better the fitting of the surrogate model is the closer the1198772 is to 1 The correlation coefficients can be described by
1198772= 1 minus
sum119899
119894=1(119910119894minus 119884)2
sum119899
119894=1(119910119894minus 119910)2 (12)
1416
18
The m
axim
um st
ress120590
max 1
08
06
04
02
Variable x2 (mm)
959
858
75 Variable x1(mm)
08
07
06
05
04
03
Figure 14 Response surface of the maximum stress normalization
1416
18
Tors
iona
l ang
ular
vibr
atio
n120579
07
065
06
055
05
Variable x2 (mm)
959
858
75Variable x1
(mm)
064
063
062
061
06
059
058
057
056
055
054
Figure 15 Response surface of torsional angular vibration normal-ization
The meaning of the symbols in the formula is shown asfollows
119910 average of sample response
119899 experiments
The fitting of the surrogate model can be solved by for-mula (11) and formula (12) The correlation coefficient valuesof the elliptical basis function surrogatemodel correspondingto crankshaftmass torsional angular vibration and themaxi-mum stress over a period time aremore than 090The resultsshow that the surrogate model of the elliptical function cantruly reflect function mapping between design variable andanalysis objective The approximate model corresponding todesign variable is precise and can be used for optimization
55 Single-Object Lightweight Optimization of CrankshaftThe deterministic system-level optimization objective can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(13)
8 Mathematical Problems in Engineering
The deterministic subsystem-level optimization objectivecan be represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 120590max lt [120590]
120579max le [120579]
119865119894le 1198651198940
119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(14)
The meaning of the symbols in the formula is shown asfollows
120576 10minus5[120579] allowable torsional angular vibration[120590] allowable stress119883119895 design variable of crankshaft 119895 = 1 2 3 4 5
119909119895L lower bound of design variable
119909119895U upper bound of design variable
1198651198940 initial maximum load on main bearing over a
period time 119894 = 1 2 3 4 5 6
In the design of crankshaft structure system uncertaintyis caused by various factors such as structure parameterssystem forecastmodel sampling technology judgments crite-rion and human factors Accordingly reliability optimizationis adopted to control and eliminate system uncertainty
The reliability system-level optimization model can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(15)
The reliability subsystem-level optimization objective canbe represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 119875 [120590max lt [120590]] minus Φ (120573) le 0
119875 [120579max le [120579]] minus Φ (120573) le 0
119875 [119865119894le 1198651198940] minus Φ (120573) le 0 119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(16)
The meaning of the symbols in the formula is shown asfollows
119875(∙) probability of failure constrains120573 reliability indexΦ(120573) first-order estimate of reliability which obeysthe normal distribution
The determined optimization and reliability optimizationare operated independently on the basis of MIGA Theadvanced options of MIGA are listed in Table 2
Table 2 Advanced options of MIGA
Options Parameter settingSubpopulation size 20Number of islands 10Number of generations 50Rate of crossover 08Rate of mutation 00075Rate of migration 025Interval of migration 5Relative tournament size 05Elite 10
The initialization range and optimization results of eachdesign variable are listed in Table 3
The optimization results show that the weight of thecrankshaft is reduced 72 kg which accounts for 085 ofthe initial mass However the uncertain factors are notconsidered The weight of the structure is reduced 59 kgthrough reliability optimization The reliability optimizationcan not only achieve the lightweight of the crankshaft butalso ensure the reliability and robustness in engineeringquality
56 Multiobjective Optimization of MDO of Crankshaft Struc-ture According to formula (3) multiobjective optimizationproblem can be represented as
min 119910 = 119865 (119909) = (1198911 (119909) 1198912 (119909) 119891119899 (119909))
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(17)
Here 119891119894(119909) (119894 = 1 2 119899) is the analysis target of
designer which can represent crankshaft mass first-ordermodal frequency second-order modal frequency torsionalangular vibration the maximum stress over a period time orthe maximummain bearing load over a period time
The range of the design variables and the optimizationobjectives need to be determined by actual production MOPcan be defined as tree-objective optimization when there aretwo optimization objectives in formula (17) Formula (17) canbe represented as formula (18) where the torsional angularvibration and the maximum stress need to be optimizedConsider
min 1199102= 1198652 (119909) = 119908
11198911 (119909) + 119908
21198912 (119909)
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(18)
Here (1199081 1199082) is the weighting factor of 119891
1(119909) and 119891
2(119909)
Figures 16ndash18 show the biobject Pareto set of differentweight values Figure 19 shows the triobject Pareto set whichregards the mass the torsional angular vibration and themaximum stress over a period time as the optimization goal
In Figures 16ndash18 maximum stress increases with decreas-ing torsional angular vibration over a period time Pareto sethas changed with different weight values Appropriate weightvalue needs to be determined by the requirement of the actual
Mathematical Problems in Engineering 9
Table 3 Design variables and optimization results
Variables andresponse Initialization Upper bound Lower bound Deterministic
optimal resultsReliability
optimal results1199091mm 80 95 75 75 776
1199092mm 160 180 140 179 169
1199093mm 400 500 300 499 481
1199094mm 400 500 300 499 463
1199095mm 650 750 550 710 552
119898kg 846 mdash mdash 8388 8401
200 300 400 500 6000445
0455
0465
0475
0485
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 16 Pareto set with weight value (05 05)
200 300 400 500 6000435
0450
0465
0480
0495
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 17 Pareto set with weight value (02 08)
productionThen the Pareto set is obtained anddesigners canchoose the satisfactory optimization results
In Figure 19 the weight value is set to (1 1 1) The valuesof mass torsional angular vibration and maximum stressover a period time are expected to achieve an optimal resultHowever the paradoxical relationships are inevitably pro-duced because of the coupled interactionsThe improvement
200 300 400 500 600040
044
048
052
056
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 18 Pareto set with weight value (08 02)
200
400
600
8422
8414
8406
8398
8390
060
055
050
045
04
120579max (mm) 120590max (Mpa)
m(k
g)
Figure 19 Pareto set with three optimization objects
of one object is often at the expense of the decline of theother two Appropriate weight value needs to be determinedby the requirement of the actual productionThen the Paretoset is obtained and designers can choose the satisfactoryoptimization results
10 Mathematical Problems in Engineering
6 Conclusions
(1) The multidisciplinary optimization considering thecrankshaft modal torsional angular vibration max-imum stress over a period time and maximumload on the main bearings is operated on the basisof multi-island genetic algorithm which can effec-tively improve the comprehensive property of thecrankshaft
(2) The parallel computing in multidisciplinary opti-mization is operated on the basis of the combinationof elliptical basis function neural network theoryand cooptimization method which can enhance theoptimization efficiency so as to reduce product devel-opment cycle and costs
(3) During the design optimization process of thecrankshaft structure the reliability design is com-bined with the cooptimization method And theoptimization of the crankshaft is operated on the basisof multi-island genetic algorithm combined withdesign of experiment The optimization can not onlycontrol the system uncertainty but also ensure thereliability and robustness of the final optimal resultsof the crankshaft structure
Competing Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported by Open Fund (OGE201403-09) ofKey Laboratory of Oil amp Gas Equipment Ministry of Edu-cation (Southwest Petroleum University) and ([2014]506) ofMinistry of Industry and Information Technology (Manufac-ture of Marine High-Power Reciprocating Compressor)
References
[1] LMurawski andA Charchalis ldquoSimplifiedmethod of torsionalvibration calculation of marine power transmission systemrdquoMarine Structures vol 39 pp 335ndash349 2014
[2] Y Yilmaz and G Anlas ldquoAn investigation of the effect of coun-terweight configuration on main bearing load and crankshaftbending stressrdquoAdvances in Engineering Software vol 40 no 2pp 95ndash104 2009
[3] E Larralde and R Ocampo ldquoSelection of gas compressors part3rdquoWorld Pumps vol 2012 no 2 pp 36ndash41 2012
[4] E Larralde and R Ocampo ldquoSelection of gas compressors part1rdquoWorld Pumps vol 2011 no 5 pp 24ndash28 2011
[5] E Larralde and R Ocampo ldquoSelection of gas conpressors part2rdquoWorld Pumps no 539 pp 36ndash43 2011
[6] A Almasi ldquoReciprocating compressor optinmum design andmanufacturing with respect to performance reliability andcostrdquo Proceedings of World Academy of Science Engineering ampTechnolog vol 52 pp 48ndash53 2009
[7] A RHealth and PMMcNamara ldquoCrankshaft stress analysismdashcombination of finite element and classical analysis techniquesrdquo
Journal of Engineering for Gas Turbines and Power vol 112 no3 pp 268ndash275 1990
[8] M Rebbert R Lach and P Kley ldquoDynamic crankshaft stresscalculation using a combination of MSS and FEArdquo in Proceed-ings of the International ADAMS User Meeting Orlando FlaUSA 2000
[9] J Raub J Jones P Kley and M Rebbert ldquoAnalytical investiga-tion of crankshaft dynamics as a virtual engine modulerdquo SAETechnical Paper 1999-01-1750 1999
[10] NAWarrior A P Sime THHyde andH Fessler ldquoThedesignof overlapped crankshafts Part 1 crankpin filletsrdquo Proceedingsof the Institution of Mechanical Engineers Part D Journal ofAutomobile Engineering vol 215 no 4 pp 503ndash513 2001
[11] B-S Yang W-W Hwang D-J Kim and A C Tan ldquoConditionclassification of small reciprocating compressor for refrigeratorsusing artificial neural networks and support vector machinesrdquoMechanical Systems and Signal Processing vol 19 no 2 pp 371ndash390 2005
[12] E Benini ldquoThree-dimensional multi-objective design opti-mization of a transonic compressor rotorrdquo Journal of Propulsionand Power vol 20 no 3 pp 559ndash565 2004
[13] S Ho Y-L Lee H-T Kang and C J Wang ldquoOptimization of acrankshaft rolling process for durabilityrdquo International Journalof Fatigue vol 31 no 5 pp 799ndash808 2009
[14] S Kodiyalam R J Yang L Gu and C-H Tho ldquoMultidisci-plinary design optimization of a vehicle system in a scalablehigh performance computing environmentrdquo Structural andMultidisciplinary Optimization vol 26 no 3-4 pp 256ndash2632004
[15] A Messac and A Ismail-Yahaya ldquoMultiobjective robust designusing physical programmingrdquo Structural and MultidisciplinaryOptimization vol 23 no 5 pp 357ndash371 2002
[16] S Koetniyom P C Brooks andDC Barton ldquoThedevelopmentof a material model for cast iron that can be used for brakesystem analysisrdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 216no 5 pp 349ndash362 2002
[17] H Lu D Yu and Z Xie ldquoOptimization of vehicle disc brakesstability based on response surface methodrdquo Chinese Journal ofMechanical Engineering vol 49 no 9 pp 55ndash60 2013
[18] S Pierret R Filomeno Coelho and H Kato ldquoMultidisciplinaryand multiple operating points shape optimization of three-dimensional compressor bladesrdquo Structural and Multidisci-plinary Optimization vol 33 no 1 pp 61ndash70 2007
[19] S Rabeau P Depince and F Bennis ldquoCollaborative opti-mization of complex systems a multidisciplinary approachrdquoInternational Journal on Interactive Design and Manufacturingvol 1 no 4 pp 209ndash218 2007
[20] K Tamura D Peterson N Peterson G Stecher M Nei andS Kumar ldquoMEGA5 molecular evolutionary genetics analysisusing maximum likelihood evolutionary distance and max-imum parsimony methodsrdquo Molecular Biology and Evolutionvol 28 no 10 pp 2731ndash2739 2011
[21] A Ratnaweera S K Halgamuge and H C Watson ldquoSelf-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficientsrdquo IEEE Transactions on Evolu-tionary Computation vol 8 no 3 pp 240ndash255 2004
[22] M Dorigo and C Blum ldquoAnt colony optimization theory asurveyrdquoTheoretical Computer Science vol 344 no 2-3 pp 243ndash278 2005
Mathematical Problems in Engineering 11
[23] M Buhl and H Kabrede ldquoGeometries of transition-metalcomplexes from density-functional theoryrdquo Journal of ChemicalTheory and Computation vol 2 no 5 pp 1282ndash1290 2006
[24] J M Molero E M Garzon I Garcia and A Plaza ldquoAnalysisand optimizations of global and local versions of the RXalgorithm for anomaly detection in hyperspectral datardquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 6 no 2 pp 801ndash814 2013
[25] H Chen R Ooka and S Kato ldquoStudy on optimum designmethod for pleasant outdoor thermal environment usinggenetic algorithms (GA) and coupled simulation of convectionradiation and conductionrdquo Building and Environment vol 43no 1 pp 18ndash30 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
The meaning of the symbols in the formula is shown asfollows
[119906] displacement matrix[120593] modal shape function matrix[119902] vector of modal coordinates
An elastic body contains two types of nodes interfacenodes where forces and boundary conditions interact withthe structure during multibody system simulation (MSS)and interior nodes In MSS the position of the elastic bodyis computed by superposing its rigid body motion andelastic deformation In ADAMS this is performed usingldquoComponent Mode Synthesisrdquo technique based on Craig-Bampton method [8 9] The component modes containstatic and dynamic behavior of the structure The modaltransformation between the physical DOF and the Craig-Bampton modes and their modal coordinates is described by[2]
[119906] =
119906119861
1199061
= [
119868 0
120593119862
120593119873
]
119902119862
119902119873
(6)
The meaning of the symbols in the formula is shown asfollows
119906119861 column vectors of boundary DOF
1199061 column vectors of interior DOF
119868 identity matrix0 zero matrix120593119862 matrix of physical displacements of the interior
DOF in the constraint modes120593119873 matrix of physical displacements of the interior
DOF in the normal modes119902119862 column vector of modal coordinates of the con-
straint modes119902119873 column vector of modal coordinates of the fixed
boundary normal modes
To obtain decoupled set ofmodes constrainedmodes andnormal modes are orthogonalized
The crankshaft systemmodel is shown in Figure 3 Elastic3D solid crankshaft model of reciprocating compressor isobtained inANSYS usingmodal superpositionmethod First3D solid model of the crankshaft is imported to ANSYS andfinite element model of the crankshaft is obtained Flexiblecrankshaft model is obtained through modal synthesis con-sidering the first 30 fixed boundary normalmodesThen thismodel is imported to ADAMSView and 3D finite elementmodel is run with ADAMS
42 Strength of Crankshaft The boundary condition ofcrankshaft strength analysis is shown in Figure 4 The radialand axial freedom of main bearings from A to F areconstrained Forces in a reciprocating compressor can bedivided into gas forces piston lateral impact forces andinertia forces The gas forces are applied on the prismatic
xy
z
Figure 3 Model of crankshaft system
⑤
I II III IV V VI
⑥④① ② ③
Figure 4 Boundary condition of crankshaft strength analysis
pairs of pistonThen excitation force and torque acted on thecrankpin from I to VI are obtained byMSS In the calculationexample the rotate speed of crankshaft is set to 994 rmin themanifold pressure is set to 20Mpa and the exhaust pressureis set to 60Mpa The type of cylinder is double-acting
5 Multidisciplinary Optimization ofCrankshaft
The deterministic optimization reliability optimization andmultiobjective optimization are operated independently onthe basis of EBFNN andCOThe flow chart ofMDO is shownin Figure 5
51 System Decomposition Systems in crankshaft structurecan be divided into mass NVH and strength subsystemThe NVH subsystem includes modal analysis and torsionalvibration
52 Design Variable The structure of crankshaft system hasan important effect on the torsional vibration strengthnatural frequency and mass of crankshaft As the crankshaftis constrained by the dimension and assembly of connectingrod frame and other parts the dimension of crank journalscrankpins and bore spacing cannot be changed in thiscalculation example Consequently transitional fillet (119909
1)
oil passage (1199092) and shape parameters of lightening holes
(1199093 1199094 1199095) are chosen as the design variables which is shown
in Figure 6
53 Experiment Design Opt-LHD is adopted to obtain theexperimental scheme and perform data sampling The ellip-tical basis function neural network (EBFNN) model con-sidering modal frequency static strength torsional vibration
Mathematical Problems in Engineering 5
System decomposition
Experiment design
Satisfyingprecision
Single-objectoptimization
End
No
Multiobjectoptimization
A set of sampleddata given by
experiment design
Disciplinaryanalysis 1
Training
Establishment of EBF
Consideringuncertainty
Reliabilityoptimization
Deterministicoptimization
Convergence
Pareto set
Select optimalsolution
Meetrequirement
Yes
Yes
YesNo
No
Yes
No
YesNo
Disciplinary
Disciplinaryanalysis 1
Disciplinaryanalysis n
analysis nmiddot middot middot
middot middot middot
Figure 5 Flow chart of crankshaft system MDO
Oil passage x2
Lightening holes
Transitional fillet x1
x3 x4 x5
Figure 6 Design variables of MDO
angular displacement and lightweight design of crankshaft isbuilt The experimental scheme is listed in Table 1
Targets in NVH subsystem include first-order modalfrequency (119891
1) second-order modal frequency (119891
2) and the
maximum torsional angular vibration over a period time(120579max) Targets in strength subsystem include the maximumload on the main bearing over a period (119865
1 1198652 1198653 1198654 1198655 1198656)
0 4 8 12 16 20838
840
842
844
846
Sample n
Cran
ksha
ft m
assm
(kg)
Figure 7 Result of crankshaft mass
Table 1 Experimental scheme based on Opt-LHD
SampleDesign variables
1199091
1199092
1199093
1199094
1199095
mm mm mm mm mm1 918 1653 4684 3842 7502 782 1463 4053 3526 72893 761 1674 3105 4053 65534 771 1758 4579 3947 70795 887 1484 4263 4158 5506 834 1568 500 3316 63427 75 1547 4474 4579 60268 897 180 3421 4368 68689 939 1737 4368 3421 613210 845 1632 3316 500 571111 866 1421 4895 4474 697412 908 1611 300 3632 592413 855 1695 3526 300 718414 95 1526 3737 4684 665815 803 1779 4158 3737 560516 929 1442 3947 3211 676317 792 1505 3632 3105 581618 824 140 3211 4263 644719 876 1716 4789 4789 623720 813 1589 3842 4895 7395
and the maximum stress over a period time (120590max) Mass ofthe crankshaft (119898) is the target of the mass subsystem
The time of training is set to 20 based on the parallelcomputing The result is listed from Figures 7ndash11
54 Surrogate Model Each response is mapped to ellipticalbasis function surrogate model on the theory of the ellipticalbasis function neural network It is shown in Figure 12
6 Mathematical Problems in EngineeringN
atur
al fr
eque
ncy
(Hz)
0 4 8 12 16 20410
417
424
431
438
Sample n
f2
f1
Figure 8 Result of modal frequency
0 4 8 12 16 20Sample n
08
07
06
05
04
Tors
iona
l ang
ular
vib
ratio
n120579
max
(∘)
Figure 9 Result of themaximumof torsional angular vibration overa period time
0 4 8 12 16 20400
600
800
1000
1200
Max
imum
stre
ss120590
max
(Mpa
)
Sample n
Figure 10 Result of the maximum stress over a period time
0 4 8 12 16 20110
119
128
137
146
Mai
n be
arin
g lo
ad (k
N)
F1 F2F3F4
F5 F6
Sample n
Figure 11 Result of main bearing load over a period time
n
Fiveinfluence
factorsof
crankshaft
1
2Surrogate
modelof
eachtarget
Input Output
Hidden-layer
y1
y2
ym
x1
xh
Figure 12 EBFNN model of crankshaft
The elliptical basis function neural network includingℎ input parameters 119899 hidden-layer nodes and 119898 outputparameters can be described by
119910119898 (119883) =
119899
sum
119894=1
[120572119898119894V119894 (119909)] + 120572
119898(119899+1) (7)
The meaning of the symbols in the formula is shown asfollows
119909 design variable120572119898119894 link weight between 119894th hidden-layer node and
119898th output parameterV119894(119909) base function by using Mahalanobis distance
which can be described by
V119894 (119909) = (119909 minus 119909
119894)119879119878minus1
(119909 minus 119909119894) (8)
The meaning of the symbols in the formula is shown asfollows
119878 covariance matrix which can be described by
119878 =1
119899
119899
sum
119894=1
(119909119894minus 120583) (119909
119894minus 120583)119879 (9)
Here 120583 is the sample data center
Mathematical Problems in Engineering 7
1416
18
09
085
08
075
07
065
Variable x2 (mm)
959
858
75 Variable x1(mm)
086
084
082
08
078
076
074
072
07
068
Mas
sm(k
g)
Figure 13 Response surface of mass normalization
Having gained output responses 119910 = (119910(1)
119910(1)
119910(119899)
0) corresponding to 119899 samples the connection matrixcan be described by the following
120572 =
[[[[[[
[
[[[[
[
V1(1199091) sdot sdot sdot V
1(119909119899)
d
V119899(1199091) sdot sdot sdot V
119899(119909119899)
]]]]
]
1
1 0
]]]]]]
]
119910 (10)
The tan-sigmoid function is used in this neural networkHence ideal output results should be close or equal to 1 Thenormalization processing of experiment data is carried outwhich can be described by
119884119894= 01 + 08 times
119910119894minus 119910119894min
119910119894max minus 119910
119894min (11)
The meaning of the symbols in the formula is shown asfollows
119884119894 output values of normalization neural network
119910119894 experimental data
119910119894min the minimum experimental data
119910119894max the maximum experimental data
The elliptical basis function surrogate model betweendesign variables and its analysis target can be solved com-bining formulas (6) to (11) The response surface of masstorsional angular vibration and the maximum stress areplotted in Figures 13ndash15
As the elliptical basis function surrogate model betweeninput variables and its analysis targets cannot be describedby a specific function correlation coefficients (1198772) are usedto evaluate the degree of approximation between eachmodelThe better the fitting of the surrogate model is the closer the1198772 is to 1 The correlation coefficients can be described by
1198772= 1 minus
sum119899
119894=1(119910119894minus 119884)2
sum119899
119894=1(119910119894minus 119910)2 (12)
1416
18
The m
axim
um st
ress120590
max 1
08
06
04
02
Variable x2 (mm)
959
858
75 Variable x1(mm)
08
07
06
05
04
03
Figure 14 Response surface of the maximum stress normalization
1416
18
Tors
iona
l ang
ular
vibr
atio
n120579
07
065
06
055
05
Variable x2 (mm)
959
858
75Variable x1
(mm)
064
063
062
061
06
059
058
057
056
055
054
Figure 15 Response surface of torsional angular vibration normal-ization
The meaning of the symbols in the formula is shown asfollows
119910 average of sample response
119899 experiments
The fitting of the surrogate model can be solved by for-mula (11) and formula (12) The correlation coefficient valuesof the elliptical basis function surrogatemodel correspondingto crankshaftmass torsional angular vibration and themaxi-mum stress over a period time aremore than 090The resultsshow that the surrogate model of the elliptical function cantruly reflect function mapping between design variable andanalysis objective The approximate model corresponding todesign variable is precise and can be used for optimization
55 Single-Object Lightweight Optimization of CrankshaftThe deterministic system-level optimization objective can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(13)
8 Mathematical Problems in Engineering
The deterministic subsystem-level optimization objectivecan be represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 120590max lt [120590]
120579max le [120579]
119865119894le 1198651198940
119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(14)
The meaning of the symbols in the formula is shown asfollows
120576 10minus5[120579] allowable torsional angular vibration[120590] allowable stress119883119895 design variable of crankshaft 119895 = 1 2 3 4 5
119909119895L lower bound of design variable
119909119895U upper bound of design variable
1198651198940 initial maximum load on main bearing over a
period time 119894 = 1 2 3 4 5 6
In the design of crankshaft structure system uncertaintyis caused by various factors such as structure parameterssystem forecastmodel sampling technology judgments crite-rion and human factors Accordingly reliability optimizationis adopted to control and eliminate system uncertainty
The reliability system-level optimization model can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(15)
The reliability subsystem-level optimization objective canbe represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 119875 [120590max lt [120590]] minus Φ (120573) le 0
119875 [120579max le [120579]] minus Φ (120573) le 0
119875 [119865119894le 1198651198940] minus Φ (120573) le 0 119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(16)
The meaning of the symbols in the formula is shown asfollows
119875(∙) probability of failure constrains120573 reliability indexΦ(120573) first-order estimate of reliability which obeysthe normal distribution
The determined optimization and reliability optimizationare operated independently on the basis of MIGA Theadvanced options of MIGA are listed in Table 2
Table 2 Advanced options of MIGA
Options Parameter settingSubpopulation size 20Number of islands 10Number of generations 50Rate of crossover 08Rate of mutation 00075Rate of migration 025Interval of migration 5Relative tournament size 05Elite 10
The initialization range and optimization results of eachdesign variable are listed in Table 3
The optimization results show that the weight of thecrankshaft is reduced 72 kg which accounts for 085 ofthe initial mass However the uncertain factors are notconsidered The weight of the structure is reduced 59 kgthrough reliability optimization The reliability optimizationcan not only achieve the lightweight of the crankshaft butalso ensure the reliability and robustness in engineeringquality
56 Multiobjective Optimization of MDO of Crankshaft Struc-ture According to formula (3) multiobjective optimizationproblem can be represented as
min 119910 = 119865 (119909) = (1198911 (119909) 1198912 (119909) 119891119899 (119909))
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(17)
Here 119891119894(119909) (119894 = 1 2 119899) is the analysis target of
designer which can represent crankshaft mass first-ordermodal frequency second-order modal frequency torsionalangular vibration the maximum stress over a period time orthe maximummain bearing load over a period time
The range of the design variables and the optimizationobjectives need to be determined by actual production MOPcan be defined as tree-objective optimization when there aretwo optimization objectives in formula (17) Formula (17) canbe represented as formula (18) where the torsional angularvibration and the maximum stress need to be optimizedConsider
min 1199102= 1198652 (119909) = 119908
11198911 (119909) + 119908
21198912 (119909)
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(18)
Here (1199081 1199082) is the weighting factor of 119891
1(119909) and 119891
2(119909)
Figures 16ndash18 show the biobject Pareto set of differentweight values Figure 19 shows the triobject Pareto set whichregards the mass the torsional angular vibration and themaximum stress over a period time as the optimization goal
In Figures 16ndash18 maximum stress increases with decreas-ing torsional angular vibration over a period time Pareto sethas changed with different weight values Appropriate weightvalue needs to be determined by the requirement of the actual
Mathematical Problems in Engineering 9
Table 3 Design variables and optimization results
Variables andresponse Initialization Upper bound Lower bound Deterministic
optimal resultsReliability
optimal results1199091mm 80 95 75 75 776
1199092mm 160 180 140 179 169
1199093mm 400 500 300 499 481
1199094mm 400 500 300 499 463
1199095mm 650 750 550 710 552
119898kg 846 mdash mdash 8388 8401
200 300 400 500 6000445
0455
0465
0475
0485
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 16 Pareto set with weight value (05 05)
200 300 400 500 6000435
0450
0465
0480
0495
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 17 Pareto set with weight value (02 08)
productionThen the Pareto set is obtained anddesigners canchoose the satisfactory optimization results
In Figure 19 the weight value is set to (1 1 1) The valuesof mass torsional angular vibration and maximum stressover a period time are expected to achieve an optimal resultHowever the paradoxical relationships are inevitably pro-duced because of the coupled interactionsThe improvement
200 300 400 500 600040
044
048
052
056
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 18 Pareto set with weight value (08 02)
200
400
600
8422
8414
8406
8398
8390
060
055
050
045
04
120579max (mm) 120590max (Mpa)
m(k
g)
Figure 19 Pareto set with three optimization objects
of one object is often at the expense of the decline of theother two Appropriate weight value needs to be determinedby the requirement of the actual productionThen the Paretoset is obtained and designers can choose the satisfactoryoptimization results
10 Mathematical Problems in Engineering
6 Conclusions
(1) The multidisciplinary optimization considering thecrankshaft modal torsional angular vibration max-imum stress over a period time and maximumload on the main bearings is operated on the basisof multi-island genetic algorithm which can effec-tively improve the comprehensive property of thecrankshaft
(2) The parallel computing in multidisciplinary opti-mization is operated on the basis of the combinationof elliptical basis function neural network theoryand cooptimization method which can enhance theoptimization efficiency so as to reduce product devel-opment cycle and costs
(3) During the design optimization process of thecrankshaft structure the reliability design is com-bined with the cooptimization method And theoptimization of the crankshaft is operated on the basisof multi-island genetic algorithm combined withdesign of experiment The optimization can not onlycontrol the system uncertainty but also ensure thereliability and robustness of the final optimal resultsof the crankshaft structure
Competing Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported by Open Fund (OGE201403-09) ofKey Laboratory of Oil amp Gas Equipment Ministry of Edu-cation (Southwest Petroleum University) and ([2014]506) ofMinistry of Industry and Information Technology (Manufac-ture of Marine High-Power Reciprocating Compressor)
References
[1] LMurawski andA Charchalis ldquoSimplifiedmethod of torsionalvibration calculation of marine power transmission systemrdquoMarine Structures vol 39 pp 335ndash349 2014
[2] Y Yilmaz and G Anlas ldquoAn investigation of the effect of coun-terweight configuration on main bearing load and crankshaftbending stressrdquoAdvances in Engineering Software vol 40 no 2pp 95ndash104 2009
[3] E Larralde and R Ocampo ldquoSelection of gas compressors part3rdquoWorld Pumps vol 2012 no 2 pp 36ndash41 2012
[4] E Larralde and R Ocampo ldquoSelection of gas compressors part1rdquoWorld Pumps vol 2011 no 5 pp 24ndash28 2011
[5] E Larralde and R Ocampo ldquoSelection of gas conpressors part2rdquoWorld Pumps no 539 pp 36ndash43 2011
[6] A Almasi ldquoReciprocating compressor optinmum design andmanufacturing with respect to performance reliability andcostrdquo Proceedings of World Academy of Science Engineering ampTechnolog vol 52 pp 48ndash53 2009
[7] A RHealth and PMMcNamara ldquoCrankshaft stress analysismdashcombination of finite element and classical analysis techniquesrdquo
Journal of Engineering for Gas Turbines and Power vol 112 no3 pp 268ndash275 1990
[8] M Rebbert R Lach and P Kley ldquoDynamic crankshaft stresscalculation using a combination of MSS and FEArdquo in Proceed-ings of the International ADAMS User Meeting Orlando FlaUSA 2000
[9] J Raub J Jones P Kley and M Rebbert ldquoAnalytical investiga-tion of crankshaft dynamics as a virtual engine modulerdquo SAETechnical Paper 1999-01-1750 1999
[10] NAWarrior A P Sime THHyde andH Fessler ldquoThedesignof overlapped crankshafts Part 1 crankpin filletsrdquo Proceedingsof the Institution of Mechanical Engineers Part D Journal ofAutomobile Engineering vol 215 no 4 pp 503ndash513 2001
[11] B-S Yang W-W Hwang D-J Kim and A C Tan ldquoConditionclassification of small reciprocating compressor for refrigeratorsusing artificial neural networks and support vector machinesrdquoMechanical Systems and Signal Processing vol 19 no 2 pp 371ndash390 2005
[12] E Benini ldquoThree-dimensional multi-objective design opti-mization of a transonic compressor rotorrdquo Journal of Propulsionand Power vol 20 no 3 pp 559ndash565 2004
[13] S Ho Y-L Lee H-T Kang and C J Wang ldquoOptimization of acrankshaft rolling process for durabilityrdquo International Journalof Fatigue vol 31 no 5 pp 799ndash808 2009
[14] S Kodiyalam R J Yang L Gu and C-H Tho ldquoMultidisci-plinary design optimization of a vehicle system in a scalablehigh performance computing environmentrdquo Structural andMultidisciplinary Optimization vol 26 no 3-4 pp 256ndash2632004
[15] A Messac and A Ismail-Yahaya ldquoMultiobjective robust designusing physical programmingrdquo Structural and MultidisciplinaryOptimization vol 23 no 5 pp 357ndash371 2002
[16] S Koetniyom P C Brooks andDC Barton ldquoThedevelopmentof a material model for cast iron that can be used for brakesystem analysisrdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 216no 5 pp 349ndash362 2002
[17] H Lu D Yu and Z Xie ldquoOptimization of vehicle disc brakesstability based on response surface methodrdquo Chinese Journal ofMechanical Engineering vol 49 no 9 pp 55ndash60 2013
[18] S Pierret R Filomeno Coelho and H Kato ldquoMultidisciplinaryand multiple operating points shape optimization of three-dimensional compressor bladesrdquo Structural and Multidisci-plinary Optimization vol 33 no 1 pp 61ndash70 2007
[19] S Rabeau P Depince and F Bennis ldquoCollaborative opti-mization of complex systems a multidisciplinary approachrdquoInternational Journal on Interactive Design and Manufacturingvol 1 no 4 pp 209ndash218 2007
[20] K Tamura D Peterson N Peterson G Stecher M Nei andS Kumar ldquoMEGA5 molecular evolutionary genetics analysisusing maximum likelihood evolutionary distance and max-imum parsimony methodsrdquo Molecular Biology and Evolutionvol 28 no 10 pp 2731ndash2739 2011
[21] A Ratnaweera S K Halgamuge and H C Watson ldquoSelf-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficientsrdquo IEEE Transactions on Evolu-tionary Computation vol 8 no 3 pp 240ndash255 2004
[22] M Dorigo and C Blum ldquoAnt colony optimization theory asurveyrdquoTheoretical Computer Science vol 344 no 2-3 pp 243ndash278 2005
Mathematical Problems in Engineering 11
[23] M Buhl and H Kabrede ldquoGeometries of transition-metalcomplexes from density-functional theoryrdquo Journal of ChemicalTheory and Computation vol 2 no 5 pp 1282ndash1290 2006
[24] J M Molero E M Garzon I Garcia and A Plaza ldquoAnalysisand optimizations of global and local versions of the RXalgorithm for anomaly detection in hyperspectral datardquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 6 no 2 pp 801ndash814 2013
[25] H Chen R Ooka and S Kato ldquoStudy on optimum designmethod for pleasant outdoor thermal environment usinggenetic algorithms (GA) and coupled simulation of convectionradiation and conductionrdquo Building and Environment vol 43no 1 pp 18ndash30 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
System decomposition
Experiment design
Satisfyingprecision
Single-objectoptimization
End
No
Multiobjectoptimization
A set of sampleddata given by
experiment design
Disciplinaryanalysis 1
Training
Establishment of EBF
Consideringuncertainty
Reliabilityoptimization
Deterministicoptimization
Convergence
Pareto set
Select optimalsolution
Meetrequirement
Yes
Yes
YesNo
No
Yes
No
YesNo
Disciplinary
Disciplinaryanalysis 1
Disciplinaryanalysis n
analysis nmiddot middot middot
middot middot middot
Figure 5 Flow chart of crankshaft system MDO
Oil passage x2
Lightening holes
Transitional fillet x1
x3 x4 x5
Figure 6 Design variables of MDO
angular displacement and lightweight design of crankshaft isbuilt The experimental scheme is listed in Table 1
Targets in NVH subsystem include first-order modalfrequency (119891
1) second-order modal frequency (119891
2) and the
maximum torsional angular vibration over a period time(120579max) Targets in strength subsystem include the maximumload on the main bearing over a period (119865
1 1198652 1198653 1198654 1198655 1198656)
0 4 8 12 16 20838
840
842
844
846
Sample n
Cran
ksha
ft m
assm
(kg)
Figure 7 Result of crankshaft mass
Table 1 Experimental scheme based on Opt-LHD
SampleDesign variables
1199091
1199092
1199093
1199094
1199095
mm mm mm mm mm1 918 1653 4684 3842 7502 782 1463 4053 3526 72893 761 1674 3105 4053 65534 771 1758 4579 3947 70795 887 1484 4263 4158 5506 834 1568 500 3316 63427 75 1547 4474 4579 60268 897 180 3421 4368 68689 939 1737 4368 3421 613210 845 1632 3316 500 571111 866 1421 4895 4474 697412 908 1611 300 3632 592413 855 1695 3526 300 718414 95 1526 3737 4684 665815 803 1779 4158 3737 560516 929 1442 3947 3211 676317 792 1505 3632 3105 581618 824 140 3211 4263 644719 876 1716 4789 4789 623720 813 1589 3842 4895 7395
and the maximum stress over a period time (120590max) Mass ofthe crankshaft (119898) is the target of the mass subsystem
The time of training is set to 20 based on the parallelcomputing The result is listed from Figures 7ndash11
54 Surrogate Model Each response is mapped to ellipticalbasis function surrogate model on the theory of the ellipticalbasis function neural network It is shown in Figure 12
6 Mathematical Problems in EngineeringN
atur
al fr
eque
ncy
(Hz)
0 4 8 12 16 20410
417
424
431
438
Sample n
f2
f1
Figure 8 Result of modal frequency
0 4 8 12 16 20Sample n
08
07
06
05
04
Tors
iona
l ang
ular
vib
ratio
n120579
max
(∘)
Figure 9 Result of themaximumof torsional angular vibration overa period time
0 4 8 12 16 20400
600
800
1000
1200
Max
imum
stre
ss120590
max
(Mpa
)
Sample n
Figure 10 Result of the maximum stress over a period time
0 4 8 12 16 20110
119
128
137
146
Mai
n be
arin
g lo
ad (k
N)
F1 F2F3F4
F5 F6
Sample n
Figure 11 Result of main bearing load over a period time
n
Fiveinfluence
factorsof
crankshaft
1
2Surrogate
modelof
eachtarget
Input Output
Hidden-layer
y1
y2
ym
x1
xh
Figure 12 EBFNN model of crankshaft
The elliptical basis function neural network includingℎ input parameters 119899 hidden-layer nodes and 119898 outputparameters can be described by
119910119898 (119883) =
119899
sum
119894=1
[120572119898119894V119894 (119909)] + 120572
119898(119899+1) (7)
The meaning of the symbols in the formula is shown asfollows
119909 design variable120572119898119894 link weight between 119894th hidden-layer node and
119898th output parameterV119894(119909) base function by using Mahalanobis distance
which can be described by
V119894 (119909) = (119909 minus 119909
119894)119879119878minus1
(119909 minus 119909119894) (8)
The meaning of the symbols in the formula is shown asfollows
119878 covariance matrix which can be described by
119878 =1
119899
119899
sum
119894=1
(119909119894minus 120583) (119909
119894minus 120583)119879 (9)
Here 120583 is the sample data center
Mathematical Problems in Engineering 7
1416
18
09
085
08
075
07
065
Variable x2 (mm)
959
858
75 Variable x1(mm)
086
084
082
08
078
076
074
072
07
068
Mas
sm(k
g)
Figure 13 Response surface of mass normalization
Having gained output responses 119910 = (119910(1)
119910(1)
119910(119899)
0) corresponding to 119899 samples the connection matrixcan be described by the following
120572 =
[[[[[[
[
[[[[
[
V1(1199091) sdot sdot sdot V
1(119909119899)
d
V119899(1199091) sdot sdot sdot V
119899(119909119899)
]]]]
]
1
1 0
]]]]]]
]
119910 (10)
The tan-sigmoid function is used in this neural networkHence ideal output results should be close or equal to 1 Thenormalization processing of experiment data is carried outwhich can be described by
119884119894= 01 + 08 times
119910119894minus 119910119894min
119910119894max minus 119910
119894min (11)
The meaning of the symbols in the formula is shown asfollows
119884119894 output values of normalization neural network
119910119894 experimental data
119910119894min the minimum experimental data
119910119894max the maximum experimental data
The elliptical basis function surrogate model betweendesign variables and its analysis target can be solved com-bining formulas (6) to (11) The response surface of masstorsional angular vibration and the maximum stress areplotted in Figures 13ndash15
As the elliptical basis function surrogate model betweeninput variables and its analysis targets cannot be describedby a specific function correlation coefficients (1198772) are usedto evaluate the degree of approximation between eachmodelThe better the fitting of the surrogate model is the closer the1198772 is to 1 The correlation coefficients can be described by
1198772= 1 minus
sum119899
119894=1(119910119894minus 119884)2
sum119899
119894=1(119910119894minus 119910)2 (12)
1416
18
The m
axim
um st
ress120590
max 1
08
06
04
02
Variable x2 (mm)
959
858
75 Variable x1(mm)
08
07
06
05
04
03
Figure 14 Response surface of the maximum stress normalization
1416
18
Tors
iona
l ang
ular
vibr
atio
n120579
07
065
06
055
05
Variable x2 (mm)
959
858
75Variable x1
(mm)
064
063
062
061
06
059
058
057
056
055
054
Figure 15 Response surface of torsional angular vibration normal-ization
The meaning of the symbols in the formula is shown asfollows
119910 average of sample response
119899 experiments
The fitting of the surrogate model can be solved by for-mula (11) and formula (12) The correlation coefficient valuesof the elliptical basis function surrogatemodel correspondingto crankshaftmass torsional angular vibration and themaxi-mum stress over a period time aremore than 090The resultsshow that the surrogate model of the elliptical function cantruly reflect function mapping between design variable andanalysis objective The approximate model corresponding todesign variable is precise and can be used for optimization
55 Single-Object Lightweight Optimization of CrankshaftThe deterministic system-level optimization objective can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(13)
8 Mathematical Problems in Engineering
The deterministic subsystem-level optimization objectivecan be represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 120590max lt [120590]
120579max le [120579]
119865119894le 1198651198940
119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(14)
The meaning of the symbols in the formula is shown asfollows
120576 10minus5[120579] allowable torsional angular vibration[120590] allowable stress119883119895 design variable of crankshaft 119895 = 1 2 3 4 5
119909119895L lower bound of design variable
119909119895U upper bound of design variable
1198651198940 initial maximum load on main bearing over a
period time 119894 = 1 2 3 4 5 6
In the design of crankshaft structure system uncertaintyis caused by various factors such as structure parameterssystem forecastmodel sampling technology judgments crite-rion and human factors Accordingly reliability optimizationis adopted to control and eliminate system uncertainty
The reliability system-level optimization model can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(15)
The reliability subsystem-level optimization objective canbe represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 119875 [120590max lt [120590]] minus Φ (120573) le 0
119875 [120579max le [120579]] minus Φ (120573) le 0
119875 [119865119894le 1198651198940] minus Φ (120573) le 0 119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(16)
The meaning of the symbols in the formula is shown asfollows
119875(∙) probability of failure constrains120573 reliability indexΦ(120573) first-order estimate of reliability which obeysthe normal distribution
The determined optimization and reliability optimizationare operated independently on the basis of MIGA Theadvanced options of MIGA are listed in Table 2
Table 2 Advanced options of MIGA
Options Parameter settingSubpopulation size 20Number of islands 10Number of generations 50Rate of crossover 08Rate of mutation 00075Rate of migration 025Interval of migration 5Relative tournament size 05Elite 10
The initialization range and optimization results of eachdesign variable are listed in Table 3
The optimization results show that the weight of thecrankshaft is reduced 72 kg which accounts for 085 ofthe initial mass However the uncertain factors are notconsidered The weight of the structure is reduced 59 kgthrough reliability optimization The reliability optimizationcan not only achieve the lightweight of the crankshaft butalso ensure the reliability and robustness in engineeringquality
56 Multiobjective Optimization of MDO of Crankshaft Struc-ture According to formula (3) multiobjective optimizationproblem can be represented as
min 119910 = 119865 (119909) = (1198911 (119909) 1198912 (119909) 119891119899 (119909))
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(17)
Here 119891119894(119909) (119894 = 1 2 119899) is the analysis target of
designer which can represent crankshaft mass first-ordermodal frequency second-order modal frequency torsionalangular vibration the maximum stress over a period time orthe maximummain bearing load over a period time
The range of the design variables and the optimizationobjectives need to be determined by actual production MOPcan be defined as tree-objective optimization when there aretwo optimization objectives in formula (17) Formula (17) canbe represented as formula (18) where the torsional angularvibration and the maximum stress need to be optimizedConsider
min 1199102= 1198652 (119909) = 119908
11198911 (119909) + 119908
21198912 (119909)
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(18)
Here (1199081 1199082) is the weighting factor of 119891
1(119909) and 119891
2(119909)
Figures 16ndash18 show the biobject Pareto set of differentweight values Figure 19 shows the triobject Pareto set whichregards the mass the torsional angular vibration and themaximum stress over a period time as the optimization goal
In Figures 16ndash18 maximum stress increases with decreas-ing torsional angular vibration over a period time Pareto sethas changed with different weight values Appropriate weightvalue needs to be determined by the requirement of the actual
Mathematical Problems in Engineering 9
Table 3 Design variables and optimization results
Variables andresponse Initialization Upper bound Lower bound Deterministic
optimal resultsReliability
optimal results1199091mm 80 95 75 75 776
1199092mm 160 180 140 179 169
1199093mm 400 500 300 499 481
1199094mm 400 500 300 499 463
1199095mm 650 750 550 710 552
119898kg 846 mdash mdash 8388 8401
200 300 400 500 6000445
0455
0465
0475
0485
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 16 Pareto set with weight value (05 05)
200 300 400 500 6000435
0450
0465
0480
0495
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 17 Pareto set with weight value (02 08)
productionThen the Pareto set is obtained anddesigners canchoose the satisfactory optimization results
In Figure 19 the weight value is set to (1 1 1) The valuesof mass torsional angular vibration and maximum stressover a period time are expected to achieve an optimal resultHowever the paradoxical relationships are inevitably pro-duced because of the coupled interactionsThe improvement
200 300 400 500 600040
044
048
052
056
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 18 Pareto set with weight value (08 02)
200
400
600
8422
8414
8406
8398
8390
060
055
050
045
04
120579max (mm) 120590max (Mpa)
m(k
g)
Figure 19 Pareto set with three optimization objects
of one object is often at the expense of the decline of theother two Appropriate weight value needs to be determinedby the requirement of the actual productionThen the Paretoset is obtained and designers can choose the satisfactoryoptimization results
10 Mathematical Problems in Engineering
6 Conclusions
(1) The multidisciplinary optimization considering thecrankshaft modal torsional angular vibration max-imum stress over a period time and maximumload on the main bearings is operated on the basisof multi-island genetic algorithm which can effec-tively improve the comprehensive property of thecrankshaft
(2) The parallel computing in multidisciplinary opti-mization is operated on the basis of the combinationof elliptical basis function neural network theoryand cooptimization method which can enhance theoptimization efficiency so as to reduce product devel-opment cycle and costs
(3) During the design optimization process of thecrankshaft structure the reliability design is com-bined with the cooptimization method And theoptimization of the crankshaft is operated on the basisof multi-island genetic algorithm combined withdesign of experiment The optimization can not onlycontrol the system uncertainty but also ensure thereliability and robustness of the final optimal resultsof the crankshaft structure
Competing Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported by Open Fund (OGE201403-09) ofKey Laboratory of Oil amp Gas Equipment Ministry of Edu-cation (Southwest Petroleum University) and ([2014]506) ofMinistry of Industry and Information Technology (Manufac-ture of Marine High-Power Reciprocating Compressor)
References
[1] LMurawski andA Charchalis ldquoSimplifiedmethod of torsionalvibration calculation of marine power transmission systemrdquoMarine Structures vol 39 pp 335ndash349 2014
[2] Y Yilmaz and G Anlas ldquoAn investigation of the effect of coun-terweight configuration on main bearing load and crankshaftbending stressrdquoAdvances in Engineering Software vol 40 no 2pp 95ndash104 2009
[3] E Larralde and R Ocampo ldquoSelection of gas compressors part3rdquoWorld Pumps vol 2012 no 2 pp 36ndash41 2012
[4] E Larralde and R Ocampo ldquoSelection of gas compressors part1rdquoWorld Pumps vol 2011 no 5 pp 24ndash28 2011
[5] E Larralde and R Ocampo ldquoSelection of gas conpressors part2rdquoWorld Pumps no 539 pp 36ndash43 2011
[6] A Almasi ldquoReciprocating compressor optinmum design andmanufacturing with respect to performance reliability andcostrdquo Proceedings of World Academy of Science Engineering ampTechnolog vol 52 pp 48ndash53 2009
[7] A RHealth and PMMcNamara ldquoCrankshaft stress analysismdashcombination of finite element and classical analysis techniquesrdquo
Journal of Engineering for Gas Turbines and Power vol 112 no3 pp 268ndash275 1990
[8] M Rebbert R Lach and P Kley ldquoDynamic crankshaft stresscalculation using a combination of MSS and FEArdquo in Proceed-ings of the International ADAMS User Meeting Orlando FlaUSA 2000
[9] J Raub J Jones P Kley and M Rebbert ldquoAnalytical investiga-tion of crankshaft dynamics as a virtual engine modulerdquo SAETechnical Paper 1999-01-1750 1999
[10] NAWarrior A P Sime THHyde andH Fessler ldquoThedesignof overlapped crankshafts Part 1 crankpin filletsrdquo Proceedingsof the Institution of Mechanical Engineers Part D Journal ofAutomobile Engineering vol 215 no 4 pp 503ndash513 2001
[11] B-S Yang W-W Hwang D-J Kim and A C Tan ldquoConditionclassification of small reciprocating compressor for refrigeratorsusing artificial neural networks and support vector machinesrdquoMechanical Systems and Signal Processing vol 19 no 2 pp 371ndash390 2005
[12] E Benini ldquoThree-dimensional multi-objective design opti-mization of a transonic compressor rotorrdquo Journal of Propulsionand Power vol 20 no 3 pp 559ndash565 2004
[13] S Ho Y-L Lee H-T Kang and C J Wang ldquoOptimization of acrankshaft rolling process for durabilityrdquo International Journalof Fatigue vol 31 no 5 pp 799ndash808 2009
[14] S Kodiyalam R J Yang L Gu and C-H Tho ldquoMultidisci-plinary design optimization of a vehicle system in a scalablehigh performance computing environmentrdquo Structural andMultidisciplinary Optimization vol 26 no 3-4 pp 256ndash2632004
[15] A Messac and A Ismail-Yahaya ldquoMultiobjective robust designusing physical programmingrdquo Structural and MultidisciplinaryOptimization vol 23 no 5 pp 357ndash371 2002
[16] S Koetniyom P C Brooks andDC Barton ldquoThedevelopmentof a material model for cast iron that can be used for brakesystem analysisrdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 216no 5 pp 349ndash362 2002
[17] H Lu D Yu and Z Xie ldquoOptimization of vehicle disc brakesstability based on response surface methodrdquo Chinese Journal ofMechanical Engineering vol 49 no 9 pp 55ndash60 2013
[18] S Pierret R Filomeno Coelho and H Kato ldquoMultidisciplinaryand multiple operating points shape optimization of three-dimensional compressor bladesrdquo Structural and Multidisci-plinary Optimization vol 33 no 1 pp 61ndash70 2007
[19] S Rabeau P Depince and F Bennis ldquoCollaborative opti-mization of complex systems a multidisciplinary approachrdquoInternational Journal on Interactive Design and Manufacturingvol 1 no 4 pp 209ndash218 2007
[20] K Tamura D Peterson N Peterson G Stecher M Nei andS Kumar ldquoMEGA5 molecular evolutionary genetics analysisusing maximum likelihood evolutionary distance and max-imum parsimony methodsrdquo Molecular Biology and Evolutionvol 28 no 10 pp 2731ndash2739 2011
[21] A Ratnaweera S K Halgamuge and H C Watson ldquoSelf-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficientsrdquo IEEE Transactions on Evolu-tionary Computation vol 8 no 3 pp 240ndash255 2004
[22] M Dorigo and C Blum ldquoAnt colony optimization theory asurveyrdquoTheoretical Computer Science vol 344 no 2-3 pp 243ndash278 2005
Mathematical Problems in Engineering 11
[23] M Buhl and H Kabrede ldquoGeometries of transition-metalcomplexes from density-functional theoryrdquo Journal of ChemicalTheory and Computation vol 2 no 5 pp 1282ndash1290 2006
[24] J M Molero E M Garzon I Garcia and A Plaza ldquoAnalysisand optimizations of global and local versions of the RXalgorithm for anomaly detection in hyperspectral datardquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 6 no 2 pp 801ndash814 2013
[25] H Chen R Ooka and S Kato ldquoStudy on optimum designmethod for pleasant outdoor thermal environment usinggenetic algorithms (GA) and coupled simulation of convectionradiation and conductionrdquo Building and Environment vol 43no 1 pp 18ndash30 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
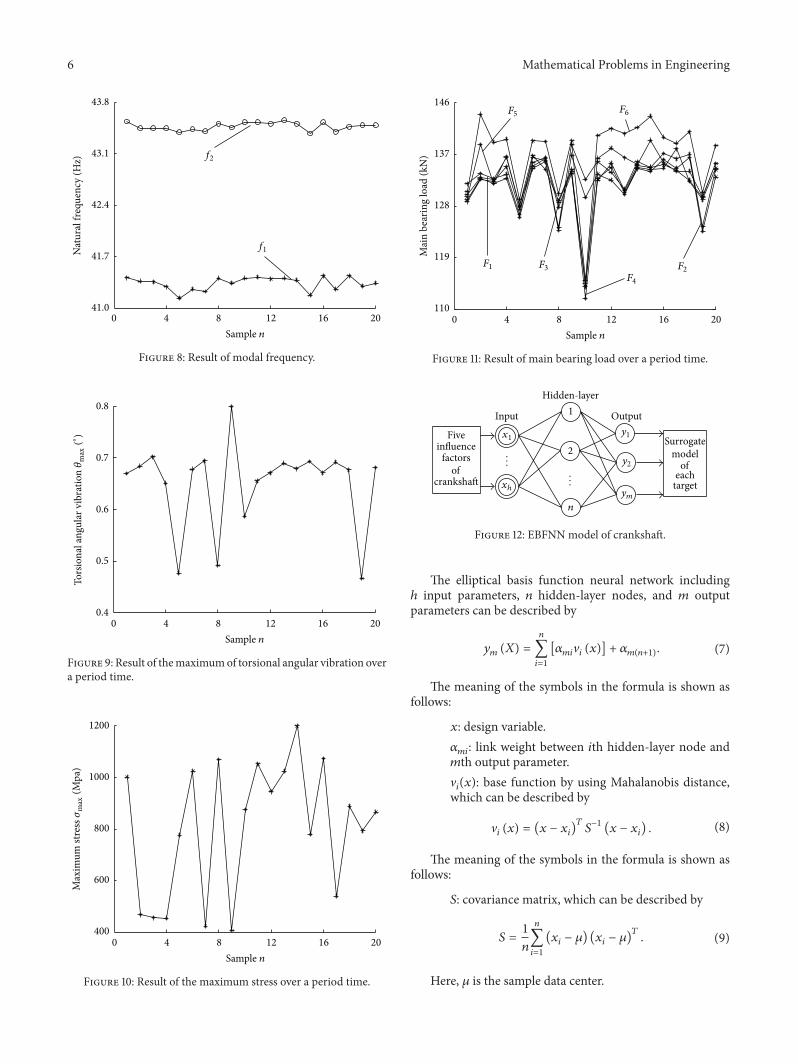
6 Mathematical Problems in EngineeringN
atur
al fr
eque
ncy
(Hz)
0 4 8 12 16 20410
417
424
431
438
Sample n
f2
f1
Figure 8 Result of modal frequency
0 4 8 12 16 20Sample n
08
07
06
05
04
Tors
iona
l ang
ular
vib
ratio
n120579
max
(∘)
Figure 9 Result of themaximumof torsional angular vibration overa period time
0 4 8 12 16 20400
600
800
1000
1200
Max
imum
stre
ss120590
max
(Mpa
)
Sample n
Figure 10 Result of the maximum stress over a period time
0 4 8 12 16 20110
119
128
137
146
Mai
n be
arin
g lo
ad (k
N)
F1 F2F3F4
F5 F6
Sample n
Figure 11 Result of main bearing load over a period time
n
Fiveinfluence
factorsof
crankshaft
1
2Surrogate
modelof
eachtarget
Input Output
Hidden-layer
y1
y2
ym
x1
xh
Figure 12 EBFNN model of crankshaft
The elliptical basis function neural network includingℎ input parameters 119899 hidden-layer nodes and 119898 outputparameters can be described by
119910119898 (119883) =
119899
sum
119894=1
[120572119898119894V119894 (119909)] + 120572
119898(119899+1) (7)
The meaning of the symbols in the formula is shown asfollows
119909 design variable120572119898119894 link weight between 119894th hidden-layer node and
119898th output parameterV119894(119909) base function by using Mahalanobis distance
which can be described by
V119894 (119909) = (119909 minus 119909
119894)119879119878minus1
(119909 minus 119909119894) (8)
The meaning of the symbols in the formula is shown asfollows
119878 covariance matrix which can be described by
119878 =1
119899
119899
sum
119894=1
(119909119894minus 120583) (119909
119894minus 120583)119879 (9)
Here 120583 is the sample data center
Mathematical Problems in Engineering 7
1416
18
09
085
08
075
07
065
Variable x2 (mm)
959
858
75 Variable x1(mm)
086
084
082
08
078
076
074
072
07
068
Mas
sm(k
g)
Figure 13 Response surface of mass normalization
Having gained output responses 119910 = (119910(1)
119910(1)
119910(119899)
0) corresponding to 119899 samples the connection matrixcan be described by the following
120572 =
[[[[[[
[
[[[[
[
V1(1199091) sdot sdot sdot V
1(119909119899)
d
V119899(1199091) sdot sdot sdot V
119899(119909119899)
]]]]
]
1
1 0
]]]]]]
]
119910 (10)
The tan-sigmoid function is used in this neural networkHence ideal output results should be close or equal to 1 Thenormalization processing of experiment data is carried outwhich can be described by
119884119894= 01 + 08 times
119910119894minus 119910119894min
119910119894max minus 119910
119894min (11)
The meaning of the symbols in the formula is shown asfollows
119884119894 output values of normalization neural network
119910119894 experimental data
119910119894min the minimum experimental data
119910119894max the maximum experimental data
The elliptical basis function surrogate model betweendesign variables and its analysis target can be solved com-bining formulas (6) to (11) The response surface of masstorsional angular vibration and the maximum stress areplotted in Figures 13ndash15
As the elliptical basis function surrogate model betweeninput variables and its analysis targets cannot be describedby a specific function correlation coefficients (1198772) are usedto evaluate the degree of approximation between eachmodelThe better the fitting of the surrogate model is the closer the1198772 is to 1 The correlation coefficients can be described by
1198772= 1 minus
sum119899
119894=1(119910119894minus 119884)2
sum119899
119894=1(119910119894minus 119910)2 (12)
1416
18
The m
axim
um st
ress120590
max 1
08
06
04
02
Variable x2 (mm)
959
858
75 Variable x1(mm)
08
07
06
05
04
03
Figure 14 Response surface of the maximum stress normalization
1416
18
Tors
iona
l ang
ular
vibr
atio
n120579
07
065
06
055
05
Variable x2 (mm)
959
858
75Variable x1
(mm)
064
063
062
061
06
059
058
057
056
055
054
Figure 15 Response surface of torsional angular vibration normal-ization
The meaning of the symbols in the formula is shown asfollows
119910 average of sample response
119899 experiments
The fitting of the surrogate model can be solved by for-mula (11) and formula (12) The correlation coefficient valuesof the elliptical basis function surrogatemodel correspondingto crankshaftmass torsional angular vibration and themaxi-mum stress over a period time aremore than 090The resultsshow that the surrogate model of the elliptical function cantruly reflect function mapping between design variable andanalysis objective The approximate model corresponding todesign variable is precise and can be used for optimization
55 Single-Object Lightweight Optimization of CrankshaftThe deterministic system-level optimization objective can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(13)
8 Mathematical Problems in Engineering
The deterministic subsystem-level optimization objectivecan be represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 120590max lt [120590]
120579max le [120579]
119865119894le 1198651198940
119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(14)
The meaning of the symbols in the formula is shown asfollows
120576 10minus5[120579] allowable torsional angular vibration[120590] allowable stress119883119895 design variable of crankshaft 119895 = 1 2 3 4 5
119909119895L lower bound of design variable
119909119895U upper bound of design variable
1198651198940 initial maximum load on main bearing over a
period time 119894 = 1 2 3 4 5 6
In the design of crankshaft structure system uncertaintyis caused by various factors such as structure parameterssystem forecastmodel sampling technology judgments crite-rion and human factors Accordingly reliability optimizationis adopted to control and eliminate system uncertainty
The reliability system-level optimization model can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(15)
The reliability subsystem-level optimization objective canbe represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 119875 [120590max lt [120590]] minus Φ (120573) le 0
119875 [120579max le [120579]] minus Φ (120573) le 0
119875 [119865119894le 1198651198940] minus Φ (120573) le 0 119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(16)
The meaning of the symbols in the formula is shown asfollows
119875(∙) probability of failure constrains120573 reliability indexΦ(120573) first-order estimate of reliability which obeysthe normal distribution
The determined optimization and reliability optimizationare operated independently on the basis of MIGA Theadvanced options of MIGA are listed in Table 2
Table 2 Advanced options of MIGA
Options Parameter settingSubpopulation size 20Number of islands 10Number of generations 50Rate of crossover 08Rate of mutation 00075Rate of migration 025Interval of migration 5Relative tournament size 05Elite 10
The initialization range and optimization results of eachdesign variable are listed in Table 3
The optimization results show that the weight of thecrankshaft is reduced 72 kg which accounts for 085 ofthe initial mass However the uncertain factors are notconsidered The weight of the structure is reduced 59 kgthrough reliability optimization The reliability optimizationcan not only achieve the lightweight of the crankshaft butalso ensure the reliability and robustness in engineeringquality
56 Multiobjective Optimization of MDO of Crankshaft Struc-ture According to formula (3) multiobjective optimizationproblem can be represented as
min 119910 = 119865 (119909) = (1198911 (119909) 1198912 (119909) 119891119899 (119909))
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(17)
Here 119891119894(119909) (119894 = 1 2 119899) is the analysis target of
designer which can represent crankshaft mass first-ordermodal frequency second-order modal frequency torsionalangular vibration the maximum stress over a period time orthe maximummain bearing load over a period time
The range of the design variables and the optimizationobjectives need to be determined by actual production MOPcan be defined as tree-objective optimization when there aretwo optimization objectives in formula (17) Formula (17) canbe represented as formula (18) where the torsional angularvibration and the maximum stress need to be optimizedConsider
min 1199102= 1198652 (119909) = 119908
11198911 (119909) + 119908
21198912 (119909)
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(18)
Here (1199081 1199082) is the weighting factor of 119891
1(119909) and 119891
2(119909)
Figures 16ndash18 show the biobject Pareto set of differentweight values Figure 19 shows the triobject Pareto set whichregards the mass the torsional angular vibration and themaximum stress over a period time as the optimization goal
In Figures 16ndash18 maximum stress increases with decreas-ing torsional angular vibration over a period time Pareto sethas changed with different weight values Appropriate weightvalue needs to be determined by the requirement of the actual
Mathematical Problems in Engineering 9
Table 3 Design variables and optimization results
Variables andresponse Initialization Upper bound Lower bound Deterministic
optimal resultsReliability
optimal results1199091mm 80 95 75 75 776
1199092mm 160 180 140 179 169
1199093mm 400 500 300 499 481
1199094mm 400 500 300 499 463
1199095mm 650 750 550 710 552
119898kg 846 mdash mdash 8388 8401
200 300 400 500 6000445
0455
0465
0475
0485
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 16 Pareto set with weight value (05 05)
200 300 400 500 6000435
0450
0465
0480
0495
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 17 Pareto set with weight value (02 08)
productionThen the Pareto set is obtained anddesigners canchoose the satisfactory optimization results
In Figure 19 the weight value is set to (1 1 1) The valuesof mass torsional angular vibration and maximum stressover a period time are expected to achieve an optimal resultHowever the paradoxical relationships are inevitably pro-duced because of the coupled interactionsThe improvement
200 300 400 500 600040
044
048
052
056
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 18 Pareto set with weight value (08 02)
200
400
600
8422
8414
8406
8398
8390
060
055
050
045
04
120579max (mm) 120590max (Mpa)
m(k
g)
Figure 19 Pareto set with three optimization objects
of one object is often at the expense of the decline of theother two Appropriate weight value needs to be determinedby the requirement of the actual productionThen the Paretoset is obtained and designers can choose the satisfactoryoptimization results
10 Mathematical Problems in Engineering
6 Conclusions
(1) The multidisciplinary optimization considering thecrankshaft modal torsional angular vibration max-imum stress over a period time and maximumload on the main bearings is operated on the basisof multi-island genetic algorithm which can effec-tively improve the comprehensive property of thecrankshaft
(2) The parallel computing in multidisciplinary opti-mization is operated on the basis of the combinationof elliptical basis function neural network theoryand cooptimization method which can enhance theoptimization efficiency so as to reduce product devel-opment cycle and costs
(3) During the design optimization process of thecrankshaft structure the reliability design is com-bined with the cooptimization method And theoptimization of the crankshaft is operated on the basisof multi-island genetic algorithm combined withdesign of experiment The optimization can not onlycontrol the system uncertainty but also ensure thereliability and robustness of the final optimal resultsof the crankshaft structure
Competing Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported by Open Fund (OGE201403-09) ofKey Laboratory of Oil amp Gas Equipment Ministry of Edu-cation (Southwest Petroleum University) and ([2014]506) ofMinistry of Industry and Information Technology (Manufac-ture of Marine High-Power Reciprocating Compressor)
References
[1] LMurawski andA Charchalis ldquoSimplifiedmethod of torsionalvibration calculation of marine power transmission systemrdquoMarine Structures vol 39 pp 335ndash349 2014
[2] Y Yilmaz and G Anlas ldquoAn investigation of the effect of coun-terweight configuration on main bearing load and crankshaftbending stressrdquoAdvances in Engineering Software vol 40 no 2pp 95ndash104 2009
[3] E Larralde and R Ocampo ldquoSelection of gas compressors part3rdquoWorld Pumps vol 2012 no 2 pp 36ndash41 2012
[4] E Larralde and R Ocampo ldquoSelection of gas compressors part1rdquoWorld Pumps vol 2011 no 5 pp 24ndash28 2011
[5] E Larralde and R Ocampo ldquoSelection of gas conpressors part2rdquoWorld Pumps no 539 pp 36ndash43 2011
[6] A Almasi ldquoReciprocating compressor optinmum design andmanufacturing with respect to performance reliability andcostrdquo Proceedings of World Academy of Science Engineering ampTechnolog vol 52 pp 48ndash53 2009
[7] A RHealth and PMMcNamara ldquoCrankshaft stress analysismdashcombination of finite element and classical analysis techniquesrdquo
Journal of Engineering for Gas Turbines and Power vol 112 no3 pp 268ndash275 1990
[8] M Rebbert R Lach and P Kley ldquoDynamic crankshaft stresscalculation using a combination of MSS and FEArdquo in Proceed-ings of the International ADAMS User Meeting Orlando FlaUSA 2000
[9] J Raub J Jones P Kley and M Rebbert ldquoAnalytical investiga-tion of crankshaft dynamics as a virtual engine modulerdquo SAETechnical Paper 1999-01-1750 1999
[10] NAWarrior A P Sime THHyde andH Fessler ldquoThedesignof overlapped crankshafts Part 1 crankpin filletsrdquo Proceedingsof the Institution of Mechanical Engineers Part D Journal ofAutomobile Engineering vol 215 no 4 pp 503ndash513 2001
[11] B-S Yang W-W Hwang D-J Kim and A C Tan ldquoConditionclassification of small reciprocating compressor for refrigeratorsusing artificial neural networks and support vector machinesrdquoMechanical Systems and Signal Processing vol 19 no 2 pp 371ndash390 2005
[12] E Benini ldquoThree-dimensional multi-objective design opti-mization of a transonic compressor rotorrdquo Journal of Propulsionand Power vol 20 no 3 pp 559ndash565 2004
[13] S Ho Y-L Lee H-T Kang and C J Wang ldquoOptimization of acrankshaft rolling process for durabilityrdquo International Journalof Fatigue vol 31 no 5 pp 799ndash808 2009
[14] S Kodiyalam R J Yang L Gu and C-H Tho ldquoMultidisci-plinary design optimization of a vehicle system in a scalablehigh performance computing environmentrdquo Structural andMultidisciplinary Optimization vol 26 no 3-4 pp 256ndash2632004
[15] A Messac and A Ismail-Yahaya ldquoMultiobjective robust designusing physical programmingrdquo Structural and MultidisciplinaryOptimization vol 23 no 5 pp 357ndash371 2002
[16] S Koetniyom P C Brooks andDC Barton ldquoThedevelopmentof a material model for cast iron that can be used for brakesystem analysisrdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 216no 5 pp 349ndash362 2002
[17] H Lu D Yu and Z Xie ldquoOptimization of vehicle disc brakesstability based on response surface methodrdquo Chinese Journal ofMechanical Engineering vol 49 no 9 pp 55ndash60 2013
[18] S Pierret R Filomeno Coelho and H Kato ldquoMultidisciplinaryand multiple operating points shape optimization of three-dimensional compressor bladesrdquo Structural and Multidisci-plinary Optimization vol 33 no 1 pp 61ndash70 2007
[19] S Rabeau P Depince and F Bennis ldquoCollaborative opti-mization of complex systems a multidisciplinary approachrdquoInternational Journal on Interactive Design and Manufacturingvol 1 no 4 pp 209ndash218 2007
[20] K Tamura D Peterson N Peterson G Stecher M Nei andS Kumar ldquoMEGA5 molecular evolutionary genetics analysisusing maximum likelihood evolutionary distance and max-imum parsimony methodsrdquo Molecular Biology and Evolutionvol 28 no 10 pp 2731ndash2739 2011
[21] A Ratnaweera S K Halgamuge and H C Watson ldquoSelf-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficientsrdquo IEEE Transactions on Evolu-tionary Computation vol 8 no 3 pp 240ndash255 2004
[22] M Dorigo and C Blum ldquoAnt colony optimization theory asurveyrdquoTheoretical Computer Science vol 344 no 2-3 pp 243ndash278 2005
Mathematical Problems in Engineering 11
[23] M Buhl and H Kabrede ldquoGeometries of transition-metalcomplexes from density-functional theoryrdquo Journal of ChemicalTheory and Computation vol 2 no 5 pp 1282ndash1290 2006
[24] J M Molero E M Garzon I Garcia and A Plaza ldquoAnalysisand optimizations of global and local versions of the RXalgorithm for anomaly detection in hyperspectral datardquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 6 no 2 pp 801ndash814 2013
[25] H Chen R Ooka and S Kato ldquoStudy on optimum designmethod for pleasant outdoor thermal environment usinggenetic algorithms (GA) and coupled simulation of convectionradiation and conductionrdquo Building and Environment vol 43no 1 pp 18ndash30 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
1416
18
09
085
08
075
07
065
Variable x2 (mm)
959
858
75 Variable x1(mm)
086
084
082
08
078
076
074
072
07
068
Mas
sm(k
g)
Figure 13 Response surface of mass normalization
Having gained output responses 119910 = (119910(1)
119910(1)
119910(119899)
0) corresponding to 119899 samples the connection matrixcan be described by the following
120572 =
[[[[[[
[
[[[[
[
V1(1199091) sdot sdot sdot V
1(119909119899)
d
V119899(1199091) sdot sdot sdot V
119899(119909119899)
]]]]
]
1
1 0
]]]]]]
]
119910 (10)
The tan-sigmoid function is used in this neural networkHence ideal output results should be close or equal to 1 Thenormalization processing of experiment data is carried outwhich can be described by
119884119894= 01 + 08 times
119910119894minus 119910119894min
119910119894max minus 119910
119894min (11)
The meaning of the symbols in the formula is shown asfollows
119884119894 output values of normalization neural network
119910119894 experimental data
119910119894min the minimum experimental data
119910119894max the maximum experimental data
The elliptical basis function surrogate model betweendesign variables and its analysis target can be solved com-bining formulas (6) to (11) The response surface of masstorsional angular vibration and the maximum stress areplotted in Figures 13ndash15
As the elliptical basis function surrogate model betweeninput variables and its analysis targets cannot be describedby a specific function correlation coefficients (1198772) are usedto evaluate the degree of approximation between eachmodelThe better the fitting of the surrogate model is the closer the1198772 is to 1 The correlation coefficients can be described by
1198772= 1 minus
sum119899
119894=1(119910119894minus 119884)2
sum119899
119894=1(119910119894minus 119910)2 (12)
1416
18
The m
axim
um st
ress120590
max 1
08
06
04
02
Variable x2 (mm)
959
858
75 Variable x1(mm)
08
07
06
05
04
03
Figure 14 Response surface of the maximum stress normalization
1416
18
Tors
iona
l ang
ular
vibr
atio
n120579
07
065
06
055
05
Variable x2 (mm)
959
858
75Variable x1
(mm)
064
063
062
061
06
059
058
057
056
055
054
Figure 15 Response surface of torsional angular vibration normal-ization
The meaning of the symbols in the formula is shown asfollows
119910 average of sample response
119899 experiments
The fitting of the surrogate model can be solved by for-mula (11) and formula (12) The correlation coefficient valuesof the elliptical basis function surrogatemodel correspondingto crankshaftmass torsional angular vibration and themaxi-mum stress over a period time aremore than 090The resultsshow that the surrogate model of the elliptical function cantruly reflect function mapping between design variable andanalysis objective The approximate model corresponding todesign variable is precise and can be used for optimization
55 Single-Object Lightweight Optimization of CrankshaftThe deterministic system-level optimization objective can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(13)
8 Mathematical Problems in Engineering
The deterministic subsystem-level optimization objectivecan be represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 120590max lt [120590]
120579max le [120579]
119865119894le 1198651198940
119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(14)
The meaning of the symbols in the formula is shown asfollows
120576 10minus5[120579] allowable torsional angular vibration[120590] allowable stress119883119895 design variable of crankshaft 119895 = 1 2 3 4 5
119909119895L lower bound of design variable
119909119895U upper bound of design variable
1198651198940 initial maximum load on main bearing over a
period time 119894 = 1 2 3 4 5 6
In the design of crankshaft structure system uncertaintyis caused by various factors such as structure parameterssystem forecastmodel sampling technology judgments crite-rion and human factors Accordingly reliability optimizationis adopted to control and eliminate system uncertainty
The reliability system-level optimization model can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(15)
The reliability subsystem-level optimization objective canbe represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 119875 [120590max lt [120590]] minus Φ (120573) le 0
119875 [120579max le [120579]] minus Φ (120573) le 0
119875 [119865119894le 1198651198940] minus Φ (120573) le 0 119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(16)
The meaning of the symbols in the formula is shown asfollows
119875(∙) probability of failure constrains120573 reliability indexΦ(120573) first-order estimate of reliability which obeysthe normal distribution
The determined optimization and reliability optimizationare operated independently on the basis of MIGA Theadvanced options of MIGA are listed in Table 2
Table 2 Advanced options of MIGA
Options Parameter settingSubpopulation size 20Number of islands 10Number of generations 50Rate of crossover 08Rate of mutation 00075Rate of migration 025Interval of migration 5Relative tournament size 05Elite 10
The initialization range and optimization results of eachdesign variable are listed in Table 3
The optimization results show that the weight of thecrankshaft is reduced 72 kg which accounts for 085 ofthe initial mass However the uncertain factors are notconsidered The weight of the structure is reduced 59 kgthrough reliability optimization The reliability optimizationcan not only achieve the lightweight of the crankshaft butalso ensure the reliability and robustness in engineeringquality
56 Multiobjective Optimization of MDO of Crankshaft Struc-ture According to formula (3) multiobjective optimizationproblem can be represented as
min 119910 = 119865 (119909) = (1198911 (119909) 1198912 (119909) 119891119899 (119909))
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(17)
Here 119891119894(119909) (119894 = 1 2 119899) is the analysis target of
designer which can represent crankshaft mass first-ordermodal frequency second-order modal frequency torsionalangular vibration the maximum stress over a period time orthe maximummain bearing load over a period time
The range of the design variables and the optimizationobjectives need to be determined by actual production MOPcan be defined as tree-objective optimization when there aretwo optimization objectives in formula (17) Formula (17) canbe represented as formula (18) where the torsional angularvibration and the maximum stress need to be optimizedConsider
min 1199102= 1198652 (119909) = 119908
11198911 (119909) + 119908
21198912 (119909)
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(18)
Here (1199081 1199082) is the weighting factor of 119891
1(119909) and 119891
2(119909)
Figures 16ndash18 show the biobject Pareto set of differentweight values Figure 19 shows the triobject Pareto set whichregards the mass the torsional angular vibration and themaximum stress over a period time as the optimization goal
In Figures 16ndash18 maximum stress increases with decreas-ing torsional angular vibration over a period time Pareto sethas changed with different weight values Appropriate weightvalue needs to be determined by the requirement of the actual
Mathematical Problems in Engineering 9
Table 3 Design variables and optimization results
Variables andresponse Initialization Upper bound Lower bound Deterministic
optimal resultsReliability
optimal results1199091mm 80 95 75 75 776
1199092mm 160 180 140 179 169
1199093mm 400 500 300 499 481
1199094mm 400 500 300 499 463
1199095mm 650 750 550 710 552
119898kg 846 mdash mdash 8388 8401
200 300 400 500 6000445
0455
0465
0475
0485
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 16 Pareto set with weight value (05 05)
200 300 400 500 6000435
0450
0465
0480
0495
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 17 Pareto set with weight value (02 08)
productionThen the Pareto set is obtained anddesigners canchoose the satisfactory optimization results
In Figure 19 the weight value is set to (1 1 1) The valuesof mass torsional angular vibration and maximum stressover a period time are expected to achieve an optimal resultHowever the paradoxical relationships are inevitably pro-duced because of the coupled interactionsThe improvement
200 300 400 500 600040
044
048
052
056
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 18 Pareto set with weight value (08 02)
200
400
600
8422
8414
8406
8398
8390
060
055
050
045
04
120579max (mm) 120590max (Mpa)
m(k
g)
Figure 19 Pareto set with three optimization objects
of one object is often at the expense of the decline of theother two Appropriate weight value needs to be determinedby the requirement of the actual productionThen the Paretoset is obtained and designers can choose the satisfactoryoptimization results
10 Mathematical Problems in Engineering
6 Conclusions
(1) The multidisciplinary optimization considering thecrankshaft modal torsional angular vibration max-imum stress over a period time and maximumload on the main bearings is operated on the basisof multi-island genetic algorithm which can effec-tively improve the comprehensive property of thecrankshaft
(2) The parallel computing in multidisciplinary opti-mization is operated on the basis of the combinationof elliptical basis function neural network theoryand cooptimization method which can enhance theoptimization efficiency so as to reduce product devel-opment cycle and costs
(3) During the design optimization process of thecrankshaft structure the reliability design is com-bined with the cooptimization method And theoptimization of the crankshaft is operated on the basisof multi-island genetic algorithm combined withdesign of experiment The optimization can not onlycontrol the system uncertainty but also ensure thereliability and robustness of the final optimal resultsof the crankshaft structure
Competing Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported by Open Fund (OGE201403-09) ofKey Laboratory of Oil amp Gas Equipment Ministry of Edu-cation (Southwest Petroleum University) and ([2014]506) ofMinistry of Industry and Information Technology (Manufac-ture of Marine High-Power Reciprocating Compressor)
References
[1] LMurawski andA Charchalis ldquoSimplifiedmethod of torsionalvibration calculation of marine power transmission systemrdquoMarine Structures vol 39 pp 335ndash349 2014
[2] Y Yilmaz and G Anlas ldquoAn investigation of the effect of coun-terweight configuration on main bearing load and crankshaftbending stressrdquoAdvances in Engineering Software vol 40 no 2pp 95ndash104 2009
[3] E Larralde and R Ocampo ldquoSelection of gas compressors part3rdquoWorld Pumps vol 2012 no 2 pp 36ndash41 2012
[4] E Larralde and R Ocampo ldquoSelection of gas compressors part1rdquoWorld Pumps vol 2011 no 5 pp 24ndash28 2011
[5] E Larralde and R Ocampo ldquoSelection of gas conpressors part2rdquoWorld Pumps no 539 pp 36ndash43 2011
[6] A Almasi ldquoReciprocating compressor optinmum design andmanufacturing with respect to performance reliability andcostrdquo Proceedings of World Academy of Science Engineering ampTechnolog vol 52 pp 48ndash53 2009
[7] A RHealth and PMMcNamara ldquoCrankshaft stress analysismdashcombination of finite element and classical analysis techniquesrdquo
Journal of Engineering for Gas Turbines and Power vol 112 no3 pp 268ndash275 1990
[8] M Rebbert R Lach and P Kley ldquoDynamic crankshaft stresscalculation using a combination of MSS and FEArdquo in Proceed-ings of the International ADAMS User Meeting Orlando FlaUSA 2000
[9] J Raub J Jones P Kley and M Rebbert ldquoAnalytical investiga-tion of crankshaft dynamics as a virtual engine modulerdquo SAETechnical Paper 1999-01-1750 1999
[10] NAWarrior A P Sime THHyde andH Fessler ldquoThedesignof overlapped crankshafts Part 1 crankpin filletsrdquo Proceedingsof the Institution of Mechanical Engineers Part D Journal ofAutomobile Engineering vol 215 no 4 pp 503ndash513 2001
[11] B-S Yang W-W Hwang D-J Kim and A C Tan ldquoConditionclassification of small reciprocating compressor for refrigeratorsusing artificial neural networks and support vector machinesrdquoMechanical Systems and Signal Processing vol 19 no 2 pp 371ndash390 2005
[12] E Benini ldquoThree-dimensional multi-objective design opti-mization of a transonic compressor rotorrdquo Journal of Propulsionand Power vol 20 no 3 pp 559ndash565 2004
[13] S Ho Y-L Lee H-T Kang and C J Wang ldquoOptimization of acrankshaft rolling process for durabilityrdquo International Journalof Fatigue vol 31 no 5 pp 799ndash808 2009
[14] S Kodiyalam R J Yang L Gu and C-H Tho ldquoMultidisci-plinary design optimization of a vehicle system in a scalablehigh performance computing environmentrdquo Structural andMultidisciplinary Optimization vol 26 no 3-4 pp 256ndash2632004
[15] A Messac and A Ismail-Yahaya ldquoMultiobjective robust designusing physical programmingrdquo Structural and MultidisciplinaryOptimization vol 23 no 5 pp 357ndash371 2002
[16] S Koetniyom P C Brooks andDC Barton ldquoThedevelopmentof a material model for cast iron that can be used for brakesystem analysisrdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 216no 5 pp 349ndash362 2002
[17] H Lu D Yu and Z Xie ldquoOptimization of vehicle disc brakesstability based on response surface methodrdquo Chinese Journal ofMechanical Engineering vol 49 no 9 pp 55ndash60 2013
[18] S Pierret R Filomeno Coelho and H Kato ldquoMultidisciplinaryand multiple operating points shape optimization of three-dimensional compressor bladesrdquo Structural and Multidisci-plinary Optimization vol 33 no 1 pp 61ndash70 2007
[19] S Rabeau P Depince and F Bennis ldquoCollaborative opti-mization of complex systems a multidisciplinary approachrdquoInternational Journal on Interactive Design and Manufacturingvol 1 no 4 pp 209ndash218 2007
[20] K Tamura D Peterson N Peterson G Stecher M Nei andS Kumar ldquoMEGA5 molecular evolutionary genetics analysisusing maximum likelihood evolutionary distance and max-imum parsimony methodsrdquo Molecular Biology and Evolutionvol 28 no 10 pp 2731ndash2739 2011
[21] A Ratnaweera S K Halgamuge and H C Watson ldquoSelf-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficientsrdquo IEEE Transactions on Evolu-tionary Computation vol 8 no 3 pp 240ndash255 2004
[22] M Dorigo and C Blum ldquoAnt colony optimization theory asurveyrdquoTheoretical Computer Science vol 344 no 2-3 pp 243ndash278 2005
Mathematical Problems in Engineering 11
[23] M Buhl and H Kabrede ldquoGeometries of transition-metalcomplexes from density-functional theoryrdquo Journal of ChemicalTheory and Computation vol 2 no 5 pp 1282ndash1290 2006
[24] J M Molero E M Garzon I Garcia and A Plaza ldquoAnalysisand optimizations of global and local versions of the RXalgorithm for anomaly detection in hyperspectral datardquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 6 no 2 pp 801ndash814 2013
[25] H Chen R Ooka and S Kato ldquoStudy on optimum designmethod for pleasant outdoor thermal environment usinggenetic algorithms (GA) and coupled simulation of convectionradiation and conductionrdquo Building and Environment vol 43no 1 pp 18ndash30 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
The deterministic subsystem-level optimization objectivecan be represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 120590max lt [120590]
120579max le [120579]
119865119894le 1198651198940
119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(14)
The meaning of the symbols in the formula is shown asfollows
120576 10minus5[120579] allowable torsional angular vibration[120590] allowable stress119883119895 design variable of crankshaft 119895 = 1 2 3 4 5
119909119895L lower bound of design variable
119909119895U upper bound of design variable
1198651198940 initial maximum load on main bearing over a
period time 119894 = 1 2 3 4 5 6
In the design of crankshaft structure system uncertaintyis caused by various factors such as structure parameterssystem forecastmodel sampling technology judgments crite-rion and human factors Accordingly reliability optimizationis adopted to control and eliminate system uncertainty
The reliability system-level optimization model can berepresented as
min 119872
st 119869119894 (119885) lt 120576 119894 = 1 2 119899
(15)
The reliability subsystem-level optimization objective canbe represented as
min 119869119894 (119885) =
1003816100381610038161003816119883119894 minus 119885119894
1003816100381610038161003816
2
st 119875 [120590max lt [120590]] minus Φ (120573) le 0
119875 [120579max le [120579]] minus Φ (120573) le 0
119875 [119865119894le 1198651198940] minus Φ (120573) le 0 119894 = 1 2 6
119883119895L le 119883
119895le 119883119895U 119895 = 1 2 5
(16)
The meaning of the symbols in the formula is shown asfollows
119875(∙) probability of failure constrains120573 reliability indexΦ(120573) first-order estimate of reliability which obeysthe normal distribution
The determined optimization and reliability optimizationare operated independently on the basis of MIGA Theadvanced options of MIGA are listed in Table 2
Table 2 Advanced options of MIGA
Options Parameter settingSubpopulation size 20Number of islands 10Number of generations 50Rate of crossover 08Rate of mutation 00075Rate of migration 025Interval of migration 5Relative tournament size 05Elite 10
The initialization range and optimization results of eachdesign variable are listed in Table 3
The optimization results show that the weight of thecrankshaft is reduced 72 kg which accounts for 085 ofthe initial mass However the uncertain factors are notconsidered The weight of the structure is reduced 59 kgthrough reliability optimization The reliability optimizationcan not only achieve the lightweight of the crankshaft butalso ensure the reliability and robustness in engineeringquality
56 Multiobjective Optimization of MDO of Crankshaft Struc-ture According to formula (3) multiobjective optimizationproblem can be represented as
min 119910 = 119865 (119909) = (1198911 (119909) 1198912 (119909) 119891119899 (119909))
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(17)
Here 119891119894(119909) (119894 = 1 2 119899) is the analysis target of
designer which can represent crankshaft mass first-ordermodal frequency second-order modal frequency torsionalangular vibration the maximum stress over a period time orthe maximummain bearing load over a period time
The range of the design variables and the optimizationobjectives need to be determined by actual production MOPcan be defined as tree-objective optimization when there aretwo optimization objectives in formula (17) Formula (17) canbe represented as formula (18) where the torsional angularvibration and the maximum stress need to be optimizedConsider
min 1199102= 1198652 (119909) = 119908
11198911 (119909) + 119908
21198912 (119909)
st 119909119895L le 119909 le 119909
119895U 119895 = 1 2 5
(18)
Here (1199081 1199082) is the weighting factor of 119891
1(119909) and 119891
2(119909)
Figures 16ndash18 show the biobject Pareto set of differentweight values Figure 19 shows the triobject Pareto set whichregards the mass the torsional angular vibration and themaximum stress over a period time as the optimization goal
In Figures 16ndash18 maximum stress increases with decreas-ing torsional angular vibration over a period time Pareto sethas changed with different weight values Appropriate weightvalue needs to be determined by the requirement of the actual
Mathematical Problems in Engineering 9
Table 3 Design variables and optimization results
Variables andresponse Initialization Upper bound Lower bound Deterministic
optimal resultsReliability
optimal results1199091mm 80 95 75 75 776
1199092mm 160 180 140 179 169
1199093mm 400 500 300 499 481
1199094mm 400 500 300 499 463
1199095mm 650 750 550 710 552
119898kg 846 mdash mdash 8388 8401
200 300 400 500 6000445
0455
0465
0475
0485
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 16 Pareto set with weight value (05 05)
200 300 400 500 6000435
0450
0465
0480
0495
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 17 Pareto set with weight value (02 08)
productionThen the Pareto set is obtained anddesigners canchoose the satisfactory optimization results
In Figure 19 the weight value is set to (1 1 1) The valuesof mass torsional angular vibration and maximum stressover a period time are expected to achieve an optimal resultHowever the paradoxical relationships are inevitably pro-duced because of the coupled interactionsThe improvement
200 300 400 500 600040
044
048
052
056
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 18 Pareto set with weight value (08 02)
200
400
600
8422
8414
8406
8398
8390
060
055
050
045
04
120579max (mm) 120590max (Mpa)
m(k
g)
Figure 19 Pareto set with three optimization objects
of one object is often at the expense of the decline of theother two Appropriate weight value needs to be determinedby the requirement of the actual productionThen the Paretoset is obtained and designers can choose the satisfactoryoptimization results
10 Mathematical Problems in Engineering
6 Conclusions
(1) The multidisciplinary optimization considering thecrankshaft modal torsional angular vibration max-imum stress over a period time and maximumload on the main bearings is operated on the basisof multi-island genetic algorithm which can effec-tively improve the comprehensive property of thecrankshaft
(2) The parallel computing in multidisciplinary opti-mization is operated on the basis of the combinationof elliptical basis function neural network theoryand cooptimization method which can enhance theoptimization efficiency so as to reduce product devel-opment cycle and costs
(3) During the design optimization process of thecrankshaft structure the reliability design is com-bined with the cooptimization method And theoptimization of the crankshaft is operated on the basisof multi-island genetic algorithm combined withdesign of experiment The optimization can not onlycontrol the system uncertainty but also ensure thereliability and robustness of the final optimal resultsof the crankshaft structure
Competing Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported by Open Fund (OGE201403-09) ofKey Laboratory of Oil amp Gas Equipment Ministry of Edu-cation (Southwest Petroleum University) and ([2014]506) ofMinistry of Industry and Information Technology (Manufac-ture of Marine High-Power Reciprocating Compressor)
References
[1] LMurawski andA Charchalis ldquoSimplifiedmethod of torsionalvibration calculation of marine power transmission systemrdquoMarine Structures vol 39 pp 335ndash349 2014
[2] Y Yilmaz and G Anlas ldquoAn investigation of the effect of coun-terweight configuration on main bearing load and crankshaftbending stressrdquoAdvances in Engineering Software vol 40 no 2pp 95ndash104 2009
[3] E Larralde and R Ocampo ldquoSelection of gas compressors part3rdquoWorld Pumps vol 2012 no 2 pp 36ndash41 2012
[4] E Larralde and R Ocampo ldquoSelection of gas compressors part1rdquoWorld Pumps vol 2011 no 5 pp 24ndash28 2011
[5] E Larralde and R Ocampo ldquoSelection of gas conpressors part2rdquoWorld Pumps no 539 pp 36ndash43 2011
[6] A Almasi ldquoReciprocating compressor optinmum design andmanufacturing with respect to performance reliability andcostrdquo Proceedings of World Academy of Science Engineering ampTechnolog vol 52 pp 48ndash53 2009
[7] A RHealth and PMMcNamara ldquoCrankshaft stress analysismdashcombination of finite element and classical analysis techniquesrdquo
Journal of Engineering for Gas Turbines and Power vol 112 no3 pp 268ndash275 1990
[8] M Rebbert R Lach and P Kley ldquoDynamic crankshaft stresscalculation using a combination of MSS and FEArdquo in Proceed-ings of the International ADAMS User Meeting Orlando FlaUSA 2000
[9] J Raub J Jones P Kley and M Rebbert ldquoAnalytical investiga-tion of crankshaft dynamics as a virtual engine modulerdquo SAETechnical Paper 1999-01-1750 1999
[10] NAWarrior A P Sime THHyde andH Fessler ldquoThedesignof overlapped crankshafts Part 1 crankpin filletsrdquo Proceedingsof the Institution of Mechanical Engineers Part D Journal ofAutomobile Engineering vol 215 no 4 pp 503ndash513 2001
[11] B-S Yang W-W Hwang D-J Kim and A C Tan ldquoConditionclassification of small reciprocating compressor for refrigeratorsusing artificial neural networks and support vector machinesrdquoMechanical Systems and Signal Processing vol 19 no 2 pp 371ndash390 2005
[12] E Benini ldquoThree-dimensional multi-objective design opti-mization of a transonic compressor rotorrdquo Journal of Propulsionand Power vol 20 no 3 pp 559ndash565 2004
[13] S Ho Y-L Lee H-T Kang and C J Wang ldquoOptimization of acrankshaft rolling process for durabilityrdquo International Journalof Fatigue vol 31 no 5 pp 799ndash808 2009
[14] S Kodiyalam R J Yang L Gu and C-H Tho ldquoMultidisci-plinary design optimization of a vehicle system in a scalablehigh performance computing environmentrdquo Structural andMultidisciplinary Optimization vol 26 no 3-4 pp 256ndash2632004
[15] A Messac and A Ismail-Yahaya ldquoMultiobjective robust designusing physical programmingrdquo Structural and MultidisciplinaryOptimization vol 23 no 5 pp 357ndash371 2002
[16] S Koetniyom P C Brooks andDC Barton ldquoThedevelopmentof a material model for cast iron that can be used for brakesystem analysisrdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 216no 5 pp 349ndash362 2002
[17] H Lu D Yu and Z Xie ldquoOptimization of vehicle disc brakesstability based on response surface methodrdquo Chinese Journal ofMechanical Engineering vol 49 no 9 pp 55ndash60 2013
[18] S Pierret R Filomeno Coelho and H Kato ldquoMultidisciplinaryand multiple operating points shape optimization of three-dimensional compressor bladesrdquo Structural and Multidisci-plinary Optimization vol 33 no 1 pp 61ndash70 2007
[19] S Rabeau P Depince and F Bennis ldquoCollaborative opti-mization of complex systems a multidisciplinary approachrdquoInternational Journal on Interactive Design and Manufacturingvol 1 no 4 pp 209ndash218 2007
[20] K Tamura D Peterson N Peterson G Stecher M Nei andS Kumar ldquoMEGA5 molecular evolutionary genetics analysisusing maximum likelihood evolutionary distance and max-imum parsimony methodsrdquo Molecular Biology and Evolutionvol 28 no 10 pp 2731ndash2739 2011
[21] A Ratnaweera S K Halgamuge and H C Watson ldquoSelf-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficientsrdquo IEEE Transactions on Evolu-tionary Computation vol 8 no 3 pp 240ndash255 2004
[22] M Dorigo and C Blum ldquoAnt colony optimization theory asurveyrdquoTheoretical Computer Science vol 344 no 2-3 pp 243ndash278 2005
Mathematical Problems in Engineering 11
[23] M Buhl and H Kabrede ldquoGeometries of transition-metalcomplexes from density-functional theoryrdquo Journal of ChemicalTheory and Computation vol 2 no 5 pp 1282ndash1290 2006
[24] J M Molero E M Garzon I Garcia and A Plaza ldquoAnalysisand optimizations of global and local versions of the RXalgorithm for anomaly detection in hyperspectral datardquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 6 no 2 pp 801ndash814 2013
[25] H Chen R Ooka and S Kato ldquoStudy on optimum designmethod for pleasant outdoor thermal environment usinggenetic algorithms (GA) and coupled simulation of convectionradiation and conductionrdquo Building and Environment vol 43no 1 pp 18ndash30 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
Table 3 Design variables and optimization results
Variables andresponse Initialization Upper bound Lower bound Deterministic
optimal resultsReliability
optimal results1199091mm 80 95 75 75 776
1199092mm 160 180 140 179 169
1199093mm 400 500 300 499 481
1199094mm 400 500 300 499 463
1199095mm 650 750 550 710 552
119898kg 846 mdash mdash 8388 8401
200 300 400 500 6000445
0455
0465
0475
0485
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 16 Pareto set with weight value (05 05)
200 300 400 500 6000435
0450
0465
0480
0495
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 17 Pareto set with weight value (02 08)
productionThen the Pareto set is obtained anddesigners canchoose the satisfactory optimization results
In Figure 19 the weight value is set to (1 1 1) The valuesof mass torsional angular vibration and maximum stressover a period time are expected to achieve an optimal resultHowever the paradoxical relationships are inevitably pro-duced because of the coupled interactionsThe improvement
200 300 400 500 600040
044
048
052
056
Tors
iona
l ang
ular
vib
ratio
n120579
max
(mm
)
Maximum stress 120590max (Mpa)
Figure 18 Pareto set with weight value (08 02)
200
400
600
8422
8414
8406
8398
8390
060
055
050
045
04
120579max (mm) 120590max (Mpa)
m(k
g)
Figure 19 Pareto set with three optimization objects
of one object is often at the expense of the decline of theother two Appropriate weight value needs to be determinedby the requirement of the actual productionThen the Paretoset is obtained and designers can choose the satisfactoryoptimization results
10 Mathematical Problems in Engineering
6 Conclusions
(1) The multidisciplinary optimization considering thecrankshaft modal torsional angular vibration max-imum stress over a period time and maximumload on the main bearings is operated on the basisof multi-island genetic algorithm which can effec-tively improve the comprehensive property of thecrankshaft
(2) The parallel computing in multidisciplinary opti-mization is operated on the basis of the combinationof elliptical basis function neural network theoryand cooptimization method which can enhance theoptimization efficiency so as to reduce product devel-opment cycle and costs
(3) During the design optimization process of thecrankshaft structure the reliability design is com-bined with the cooptimization method And theoptimization of the crankshaft is operated on the basisof multi-island genetic algorithm combined withdesign of experiment The optimization can not onlycontrol the system uncertainty but also ensure thereliability and robustness of the final optimal resultsof the crankshaft structure
Competing Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported by Open Fund (OGE201403-09) ofKey Laboratory of Oil amp Gas Equipment Ministry of Edu-cation (Southwest Petroleum University) and ([2014]506) ofMinistry of Industry and Information Technology (Manufac-ture of Marine High-Power Reciprocating Compressor)
References
[1] LMurawski andA Charchalis ldquoSimplifiedmethod of torsionalvibration calculation of marine power transmission systemrdquoMarine Structures vol 39 pp 335ndash349 2014
[2] Y Yilmaz and G Anlas ldquoAn investigation of the effect of coun-terweight configuration on main bearing load and crankshaftbending stressrdquoAdvances in Engineering Software vol 40 no 2pp 95ndash104 2009
[3] E Larralde and R Ocampo ldquoSelection of gas compressors part3rdquoWorld Pumps vol 2012 no 2 pp 36ndash41 2012
[4] E Larralde and R Ocampo ldquoSelection of gas compressors part1rdquoWorld Pumps vol 2011 no 5 pp 24ndash28 2011
[5] E Larralde and R Ocampo ldquoSelection of gas conpressors part2rdquoWorld Pumps no 539 pp 36ndash43 2011
[6] A Almasi ldquoReciprocating compressor optinmum design andmanufacturing with respect to performance reliability andcostrdquo Proceedings of World Academy of Science Engineering ampTechnolog vol 52 pp 48ndash53 2009
[7] A RHealth and PMMcNamara ldquoCrankshaft stress analysismdashcombination of finite element and classical analysis techniquesrdquo
Journal of Engineering for Gas Turbines and Power vol 112 no3 pp 268ndash275 1990
[8] M Rebbert R Lach and P Kley ldquoDynamic crankshaft stresscalculation using a combination of MSS and FEArdquo in Proceed-ings of the International ADAMS User Meeting Orlando FlaUSA 2000
[9] J Raub J Jones P Kley and M Rebbert ldquoAnalytical investiga-tion of crankshaft dynamics as a virtual engine modulerdquo SAETechnical Paper 1999-01-1750 1999
[10] NAWarrior A P Sime THHyde andH Fessler ldquoThedesignof overlapped crankshafts Part 1 crankpin filletsrdquo Proceedingsof the Institution of Mechanical Engineers Part D Journal ofAutomobile Engineering vol 215 no 4 pp 503ndash513 2001
[11] B-S Yang W-W Hwang D-J Kim and A C Tan ldquoConditionclassification of small reciprocating compressor for refrigeratorsusing artificial neural networks and support vector machinesrdquoMechanical Systems and Signal Processing vol 19 no 2 pp 371ndash390 2005
[12] E Benini ldquoThree-dimensional multi-objective design opti-mization of a transonic compressor rotorrdquo Journal of Propulsionand Power vol 20 no 3 pp 559ndash565 2004
[13] S Ho Y-L Lee H-T Kang and C J Wang ldquoOptimization of acrankshaft rolling process for durabilityrdquo International Journalof Fatigue vol 31 no 5 pp 799ndash808 2009
[14] S Kodiyalam R J Yang L Gu and C-H Tho ldquoMultidisci-plinary design optimization of a vehicle system in a scalablehigh performance computing environmentrdquo Structural andMultidisciplinary Optimization vol 26 no 3-4 pp 256ndash2632004
[15] A Messac and A Ismail-Yahaya ldquoMultiobjective robust designusing physical programmingrdquo Structural and MultidisciplinaryOptimization vol 23 no 5 pp 357ndash371 2002
[16] S Koetniyom P C Brooks andDC Barton ldquoThedevelopmentof a material model for cast iron that can be used for brakesystem analysisrdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 216no 5 pp 349ndash362 2002
[17] H Lu D Yu and Z Xie ldquoOptimization of vehicle disc brakesstability based on response surface methodrdquo Chinese Journal ofMechanical Engineering vol 49 no 9 pp 55ndash60 2013
[18] S Pierret R Filomeno Coelho and H Kato ldquoMultidisciplinaryand multiple operating points shape optimization of three-dimensional compressor bladesrdquo Structural and Multidisci-plinary Optimization vol 33 no 1 pp 61ndash70 2007
[19] S Rabeau P Depince and F Bennis ldquoCollaborative opti-mization of complex systems a multidisciplinary approachrdquoInternational Journal on Interactive Design and Manufacturingvol 1 no 4 pp 209ndash218 2007
[20] K Tamura D Peterson N Peterson G Stecher M Nei andS Kumar ldquoMEGA5 molecular evolutionary genetics analysisusing maximum likelihood evolutionary distance and max-imum parsimony methodsrdquo Molecular Biology and Evolutionvol 28 no 10 pp 2731ndash2739 2011
[21] A Ratnaweera S K Halgamuge and H C Watson ldquoSelf-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficientsrdquo IEEE Transactions on Evolu-tionary Computation vol 8 no 3 pp 240ndash255 2004
[22] M Dorigo and C Blum ldquoAnt colony optimization theory asurveyrdquoTheoretical Computer Science vol 344 no 2-3 pp 243ndash278 2005
Mathematical Problems in Engineering 11
[23] M Buhl and H Kabrede ldquoGeometries of transition-metalcomplexes from density-functional theoryrdquo Journal of ChemicalTheory and Computation vol 2 no 5 pp 1282ndash1290 2006
[24] J M Molero E M Garzon I Garcia and A Plaza ldquoAnalysisand optimizations of global and local versions of the RXalgorithm for anomaly detection in hyperspectral datardquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 6 no 2 pp 801ndash814 2013
[25] H Chen R Ooka and S Kato ldquoStudy on optimum designmethod for pleasant outdoor thermal environment usinggenetic algorithms (GA) and coupled simulation of convectionradiation and conductionrdquo Building and Environment vol 43no 1 pp 18ndash30 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
6 Conclusions
(1) The multidisciplinary optimization considering thecrankshaft modal torsional angular vibration max-imum stress over a period time and maximumload on the main bearings is operated on the basisof multi-island genetic algorithm which can effec-tively improve the comprehensive property of thecrankshaft
(2) The parallel computing in multidisciplinary opti-mization is operated on the basis of the combinationof elliptical basis function neural network theoryand cooptimization method which can enhance theoptimization efficiency so as to reduce product devel-opment cycle and costs
(3) During the design optimization process of thecrankshaft structure the reliability design is com-bined with the cooptimization method And theoptimization of the crankshaft is operated on the basisof multi-island genetic algorithm combined withdesign of experiment The optimization can not onlycontrol the system uncertainty but also ensure thereliability and robustness of the final optimal resultsof the crankshaft structure
Competing Interests
The authors declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported by Open Fund (OGE201403-09) ofKey Laboratory of Oil amp Gas Equipment Ministry of Edu-cation (Southwest Petroleum University) and ([2014]506) ofMinistry of Industry and Information Technology (Manufac-ture of Marine High-Power Reciprocating Compressor)
References
[1] LMurawski andA Charchalis ldquoSimplifiedmethod of torsionalvibration calculation of marine power transmission systemrdquoMarine Structures vol 39 pp 335ndash349 2014
[2] Y Yilmaz and G Anlas ldquoAn investigation of the effect of coun-terweight configuration on main bearing load and crankshaftbending stressrdquoAdvances in Engineering Software vol 40 no 2pp 95ndash104 2009
[3] E Larralde and R Ocampo ldquoSelection of gas compressors part3rdquoWorld Pumps vol 2012 no 2 pp 36ndash41 2012
[4] E Larralde and R Ocampo ldquoSelection of gas compressors part1rdquoWorld Pumps vol 2011 no 5 pp 24ndash28 2011
[5] E Larralde and R Ocampo ldquoSelection of gas conpressors part2rdquoWorld Pumps no 539 pp 36ndash43 2011
[6] A Almasi ldquoReciprocating compressor optinmum design andmanufacturing with respect to performance reliability andcostrdquo Proceedings of World Academy of Science Engineering ampTechnolog vol 52 pp 48ndash53 2009
[7] A RHealth and PMMcNamara ldquoCrankshaft stress analysismdashcombination of finite element and classical analysis techniquesrdquo
Journal of Engineering for Gas Turbines and Power vol 112 no3 pp 268ndash275 1990
[8] M Rebbert R Lach and P Kley ldquoDynamic crankshaft stresscalculation using a combination of MSS and FEArdquo in Proceed-ings of the International ADAMS User Meeting Orlando FlaUSA 2000
[9] J Raub J Jones P Kley and M Rebbert ldquoAnalytical investiga-tion of crankshaft dynamics as a virtual engine modulerdquo SAETechnical Paper 1999-01-1750 1999
[10] NAWarrior A P Sime THHyde andH Fessler ldquoThedesignof overlapped crankshafts Part 1 crankpin filletsrdquo Proceedingsof the Institution of Mechanical Engineers Part D Journal ofAutomobile Engineering vol 215 no 4 pp 503ndash513 2001
[11] B-S Yang W-W Hwang D-J Kim and A C Tan ldquoConditionclassification of small reciprocating compressor for refrigeratorsusing artificial neural networks and support vector machinesrdquoMechanical Systems and Signal Processing vol 19 no 2 pp 371ndash390 2005
[12] E Benini ldquoThree-dimensional multi-objective design opti-mization of a transonic compressor rotorrdquo Journal of Propulsionand Power vol 20 no 3 pp 559ndash565 2004
[13] S Ho Y-L Lee H-T Kang and C J Wang ldquoOptimization of acrankshaft rolling process for durabilityrdquo International Journalof Fatigue vol 31 no 5 pp 799ndash808 2009
[14] S Kodiyalam R J Yang L Gu and C-H Tho ldquoMultidisci-plinary design optimization of a vehicle system in a scalablehigh performance computing environmentrdquo Structural andMultidisciplinary Optimization vol 26 no 3-4 pp 256ndash2632004
[15] A Messac and A Ismail-Yahaya ldquoMultiobjective robust designusing physical programmingrdquo Structural and MultidisciplinaryOptimization vol 23 no 5 pp 357ndash371 2002
[16] S Koetniyom P C Brooks andDC Barton ldquoThedevelopmentof a material model for cast iron that can be used for brakesystem analysisrdquo Proceedings of the Institution of MechanicalEngineers Part D Journal of Automobile Engineering vol 216no 5 pp 349ndash362 2002
[17] H Lu D Yu and Z Xie ldquoOptimization of vehicle disc brakesstability based on response surface methodrdquo Chinese Journal ofMechanical Engineering vol 49 no 9 pp 55ndash60 2013
[18] S Pierret R Filomeno Coelho and H Kato ldquoMultidisciplinaryand multiple operating points shape optimization of three-dimensional compressor bladesrdquo Structural and Multidisci-plinary Optimization vol 33 no 1 pp 61ndash70 2007
[19] S Rabeau P Depince and F Bennis ldquoCollaborative opti-mization of complex systems a multidisciplinary approachrdquoInternational Journal on Interactive Design and Manufacturingvol 1 no 4 pp 209ndash218 2007
[20] K Tamura D Peterson N Peterson G Stecher M Nei andS Kumar ldquoMEGA5 molecular evolutionary genetics analysisusing maximum likelihood evolutionary distance and max-imum parsimony methodsrdquo Molecular Biology and Evolutionvol 28 no 10 pp 2731ndash2739 2011
[21] A Ratnaweera S K Halgamuge and H C Watson ldquoSelf-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficientsrdquo IEEE Transactions on Evolu-tionary Computation vol 8 no 3 pp 240ndash255 2004
[22] M Dorigo and C Blum ldquoAnt colony optimization theory asurveyrdquoTheoretical Computer Science vol 344 no 2-3 pp 243ndash278 2005
Mathematical Problems in Engineering 11
[23] M Buhl and H Kabrede ldquoGeometries of transition-metalcomplexes from density-functional theoryrdquo Journal of ChemicalTheory and Computation vol 2 no 5 pp 1282ndash1290 2006
[24] J M Molero E M Garzon I Garcia and A Plaza ldquoAnalysisand optimizations of global and local versions of the RXalgorithm for anomaly detection in hyperspectral datardquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 6 no 2 pp 801ndash814 2013
[25] H Chen R Ooka and S Kato ldquoStudy on optimum designmethod for pleasant outdoor thermal environment usinggenetic algorithms (GA) and coupled simulation of convectionradiation and conductionrdquo Building and Environment vol 43no 1 pp 18ndash30 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
[23] M Buhl and H Kabrede ldquoGeometries of transition-metalcomplexes from density-functional theoryrdquo Journal of ChemicalTheory and Computation vol 2 no 5 pp 1282ndash1290 2006
[24] J M Molero E M Garzon I Garcia and A Plaza ldquoAnalysisand optimizations of global and local versions of the RXalgorithm for anomaly detection in hyperspectral datardquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 6 no 2 pp 801ndash814 2013
[25] H Chen R Ooka and S Kato ldquoStudy on optimum designmethod for pleasant outdoor thermal environment usinggenetic algorithms (GA) and coupled simulation of convectionradiation and conductionrdquo Building and Environment vol 43no 1 pp 18ndash30 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
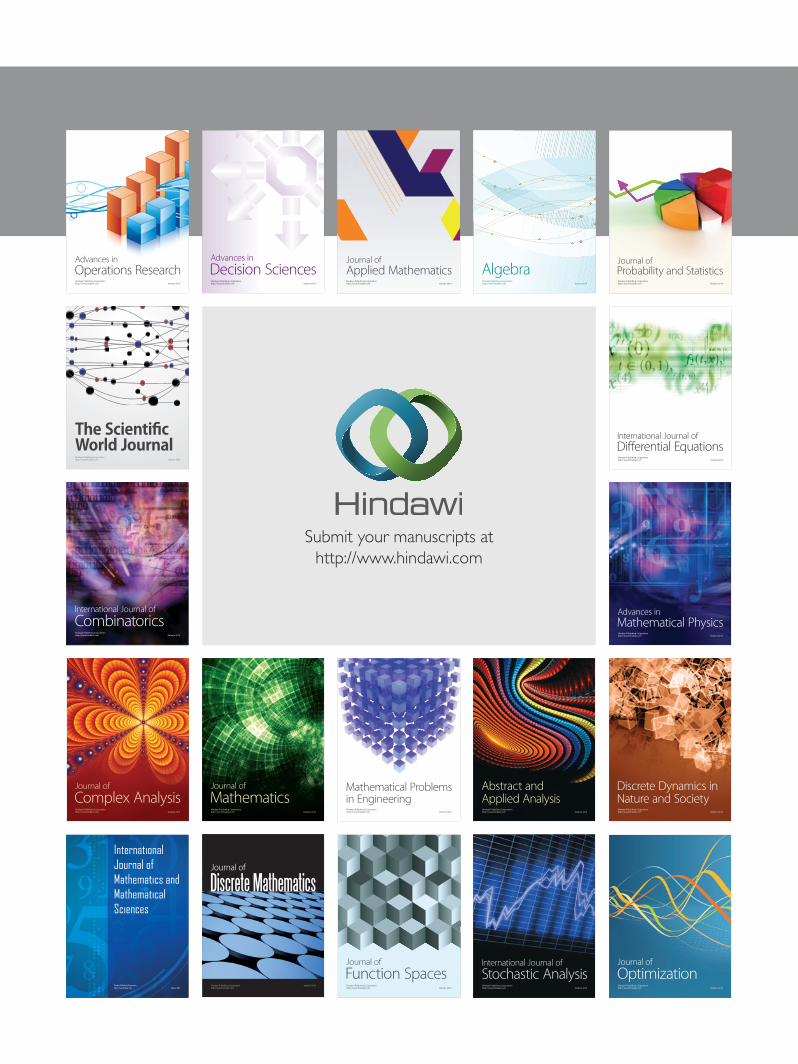
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of


















