Research Article Ionospheric Delay Handling for...
9
Research Article Ionospheric Delay Handling for Relative Navigation by Carrier-Phase Differential GPS A. Renga, 1 U. Tancredi, 2 and M. Grassi 1 1 Department of Industrial Engineering, University of Naples “Federico II”, 80125 Naples, Italy 2 Department of Engineering, University of Naples “Parthenope”, 80143 Naples, Italy Correspondence should be addressed to A. Renga; [email protected] Received 11 April 2015; Revised 25 June 2015; Accepted 2 July 2015 Academic Editor: Mahmut Reyhanoglu Copyright © 2015 A. Renga et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. e paper investigates different solutions for ionospheric delay handling in high accuracy long baseline relative positioning by Carrier-Phase Differential GPS (CDGPS). Standard literature approaches are reviewed and the relevant limitations are discussed. Hence, a completely ionosphere-free approach is proposed, in which the differential ionospheric delays are cancelled out by combination of dual frequency GPS measurements. e performance of this approach is quantified over real-world spaceborne GPS data made available by the Gravity Recovery and Climate Experiment (GRACE) mission and compared to the standard solution. 1. Introduction Carrier-Phase Differential GPS (CDGPS) is a proven tech- nology in several fields of application. CDGPS has been already employed for relative positioning of Low Earth Orbit (LEO) satellites flying in formation [1–4], of aircraſt with respect to runways [5] and for cooperative self-separation of general aviation aircraſt [6]. e capability to achieve high accuracy by CDGPS is based on the possibility to exploit the integer nature of Double Difference (DD) carrier- phase ambiguities [7]. However, as the separation among the satellites increases, the correlation of ionospheric delays among the receivers decreases [8]. As a result, DD GPS observables are affected by significant errors that complicate the integer resolution task. is paper investigates the effects of different strategies for ionospheric delay compensation on the accuracy in the relative positioning of GPS receivers in LEO over long baselines. Its results can be extended, at least in principle, to other formation flying applications [9], such as those involving Very Light Jets [10] and/or Unmanned Aerial Systems [11–13]. Different approaches exist in the literature for dealing with ionospheric delays. In high accuracy, postprocessing applications with dual frequency data [14, 15], the DD ionospheric delays are estimated within a dynamic filter [16], for example, the Extended Kalman Filter (EKF), and are modelled by very simple stochastic models, typically using random walk processes in the filter’s state vector. As an alternative, delays are modelled by Lear’s model [1, 17] which allows relating the slant ionospheric delays to the Vertical Total Electron Content (VTEC) above the receivers. Even though modelling the ionospheric delays helps to increase their observability, and thus to aid in the ambiguity resolution task, Lear’s model is known to be structurally capable of reproducing actual ionospheric delays only to a limited extent [8]. It is well known that linear combinations of GPS dual fre- quency measurements can be used to delete the ionospheric delays to first order. When those combinations are used as an input to the EFK, it can be expected that the magnitude of the ionospheric delays does not affect the achievable relative positioning accuracy. However, the use of an ionosphere-free approach is known to complicate significantly the integer ambiguities resolution task if compared to approaches that attempt to model the ionosphere [18, 19]. Hence, the choice between model-based methods (e.g., based on Lear’s model) and ionosphere-free approaches is in general not trivial [20], depending on the relative distance between the receivers, on relative dynamics, and on the status of ionospheric activity. In this sense, the ionospheric activity plays a major role in determining the set of GPS measurements and combinations to process to improve the relative positioning accuracy. Hindawi Publishing Corporation International Journal of Aerospace Engineering Volume 2015, Article ID 570382, 8 pages http://dx.doi.org/10.1155/2015/570382
Transcript of Research Article Ionospheric Delay Handling for...

Research ArticleIonospheric Delay Handling for Relative Navigation byCarrier-Phase Differential GPS
A Renga1 U Tancredi2 and M Grassi1
1Department of Industrial Engineering University of Naples ldquoFederico IIrdquo 80125 Naples Italy2Department of Engineering University of Naples ldquoParthenoperdquo 80143 Naples Italy
Correspondence should be addressed to A Renga alfredorengauninait
Received 11 April 2015 Revised 25 June 2015 Accepted 2 July 2015
Academic Editor Mahmut Reyhanoglu
Copyright copy 2015 A Renga et alThis is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The paper investigates different solutions for ionospheric delay handling in high accuracy long baseline relative positioning byCarrier-Phase Differential GPS (CDGPS) Standard literature approaches are reviewed and the relevant limitations are discussedHence a completely ionosphere-free approach is proposed in which the differential ionospheric delays are cancelled out bycombination of dual frequencyGPSmeasurementsThe performance of this approach is quantified over real-world spaceborneGPSdata made available by the Gravity Recovery and Climate Experiment (GRACE) mission and compared to the standard solution
1 Introduction
Carrier-Phase Differential GPS (CDGPS) is a proven tech-nology in several fields of application CDGPS has beenalready employed for relative positioning of Low Earth Orbit(LEO) satellites flying in formation [1ndash4] of aircraft withrespect to runways [5] and for cooperative self-separationof general aviation aircraft [6] The capability to achievehigh accuracy by CDGPS is based on the possibility toexploit the integer nature of Double Difference (DD) carrier-phase ambiguities [7] However as the separation amongthe satellites increases the correlation of ionospheric delaysamong the receivers decreases [8] As a result DD GPSobservables are affected by significant errors that complicatethe integer resolution task This paper investigates the effectsof different strategies for ionospheric delay compensation onthe accuracy in the relative positioning of GPS receivers inLEO over long baselines Its results can be extended at leastin principle to other formation flying applications [9] such asthose involving Very Light Jets [10] andor Unmanned AerialSystems [11ndash13]
Different approaches exist in the literature for dealingwith ionospheric delays In high accuracy postprocessingapplications with dual frequency data [14 15] the DDionospheric delays are estimated within a dynamic filter [16]for example the Extended Kalman Filter (EKF) and are
modelled by very simple stochastic models typically usingrandom walk processes in the filterrsquos state vector As analternative delays are modelled by Learrsquos model [1 17] whichallows relating the 119899 slant ionospheric delays to the VerticalTotal Electron Content (VTEC) above the receivers Eventhough modelling the ionospheric delays helps to increasetheir observability and thus to aid in the ambiguity resolutiontask Learrsquos model is known to be structurally capable ofreproducing actual ionospheric delays only to a limited extent[8]
It is well known that linear combinations of GPS dual fre-quency measurements can be used to delete the ionosphericdelays to first order When those combinations are used as aninput to the EFK it can be expected that the magnitude ofthe ionospheric delays does not affect the achievable relativepositioning accuracy However the use of an ionosphere-freeapproach is known to complicate significantly the integerambiguities resolution task if compared to approaches thatattempt to model the ionosphere [18 19] Hence the choicebetween model-based methods (eg based on Learrsquos model)and ionosphere-free approaches is in general not trivial [20]depending on the relative distance between the receivers onrelative dynamics and on the status of ionospheric activityIn this sense the ionospheric activity plays a major role indetermining the set of GPS measurements and combinationsto process to improve the relative positioning accuracy
Hindawi Publishing CorporationInternational Journal of Aerospace EngineeringVolume 2015 Article ID 570382 8 pageshttpdxdoiorg1011552015570382
2 International Journal of Aerospace Engineering
In this paper a completely ionosphere-free approachis pursued in which the ionospheric delays are cancelledout by combination of dual frequency GPS measurementsSeveral alternative combinations are investigated based onthe ionosphere-free combination of pseudorange and carrier-phase observables but also on GRoup And PHase Iono-spheric Correction (GRAPHIC) and Melbourne-Wubbenacombinations and thus the best combinations are selectedBased on a relative positioning scheme previously developedby the authors [17] the performance of each approachis quantified over real-world spaceborne GPS data madeavailable by the Gravity Recovery and Climate Experiment(GRACE) mission
The paper is organized as follows First the conventionalapproach is presented in which the ionospheric delays areestimated as part of the state vector through Learrsquos modelThen ionosphere-free observables are derived from the DDobservation models and two different combinations areselected for being integrated in an ionosphere-free formu-lation of the EKF The developed filter is finally tested onGRACE data
2 Ionospheric Delays Estimated byLearrsquos Model
The most common approach for handling the differentialionospheric delays in high accuracy long baseline applica-tions is to estimate the DD ionospheric delays within the EKFmodelling them using random walk processes in the statevector [14 15] This scheme usually integrates an EKF withan Integer Least Squares estimator based on the LAMDBAmethod This approach can be not sufficiently accurate inreal-time on-board implementations when accurate stochas-tic and dynamic models cannot be used In such conditionsa reliable way to proceed is to model the ionospheric delaysthrough the VTEC above the receivers by Learrsquos mappingfunction [1 8] With specific reference to a formation oftwo satellites this approach leads to the following state andmeasurement vectors
x isin R8+2119899
x = (b b VTEC NWL N1)119879
y isin R4119899 y = (P1 P2 L1 L2)
119879
(1)
where b and b are the baseline and the relative velocityvectors expressed in the Earth-Centred Earth-Fixed (ECEF)reference frame and N
1stack together the cycle ambiguities
on the L1 frequency for the 119899 DD couples
N1 isin R119899
N1 = ((1198731)01119860119861
sdot sdot sdot (1198731)0119899119860119861)
119879
(2)
where the pivot satellite that is the reference GPS satelliteselected for calculating DD observables is indicated with 0for simplicity NWL instead stacks together wide-lane cycleambiguities In (1) P indicates DD pseudorange observablesand L represents DD carrier-phase onesThe subscripts 1 and2 stand for L1 and L2GPS frequencies respectively whereas119860and 119861 subscripts refer to the receivers onboard the satellitesFinally VTEC is the vector including the two vertical total
electron contents for the two receivers According to Learrsquosmodel the zero difference ionospheric delay in meters for theGPS satellite 119894 and the receiver 119860 can be written as [1 8]
119868119894
119860=
403m3s2
1198912
1
2037
sin119864119894119860+ radicsin2119864119894
119860+ 0076
VTEC119860 (3)
where 1198911is L1 carrier frequency in Hz VTEC
119860is the (scalar)
vertical total electron content for modeling the ionosphericdelay of the receiver119860 and is expressed in number of electronsper square meter and 119864119894
119860is the elevation of the GPS satellite
119894 with respect to the receiver 119860The main advantage of Learrsquos model is the capability
to predict zero difference ionospheric delays relevant todifferent tracked GPS satellites as a function of a singleunknown parameter (ie VTECA) which is a desirableproperty for navigation filters [1]
This reference model of (1)ndash(3) has shown satisfactoryobservability features [17] since it is capable of deliveringgood estimates of the Integer Ambiguities (IA) even in caseof only 3 DD observations However this VTEC-based EKFhas some inherent accuracy limitations due to its inabilityof rejecting deviations of the true ionosphere from Learrsquosmodel which appear as additional error terms in the baselineestimate [8] In what follows the possibility is discussedof overcoming the limitations of the VTEC-based EKFby deleting the ionospheric delays through measurementcombinations
3 Ionosphere-Free Observables
Dual frequency DD carrier-phase and pseudorange observ-ables can be combined in different ways to generateionosphere-free measurements The complete DD observa-tion model is thus presented before deriving the relevantionosphere-free observables
31 DD Observation Model The DDmeasurements have thefollowing expressions [21]
(1198751)119895119896
119860119861= 120588119895119896
119860119861+ 119868119895119896
119860119861+ 120578119895119896
1119860119861
(1198752)119895119896
119860119861= 120588119895119896
119860119861+ 120574minus2119868119895119896
119860119861+ 120578119895119896
2119860119861
(1198711)119895119896
119860119861= 120588119895119896
119860119861minus 119868119895119896
119860119861+1205821 (1198731)
119895119896
119860119861+120573119895119896
1119860119861
(1198712)119895119896
119860119861= 120588119895119896
119860119861minus 120574minus2119868119895119896
119860119861+1205822 (1198732)
119895119896
119860119861+120573119895119896
2119860119861
(4)
where
(i) 120574 = 11989121198911is ratio between the L2 and L1 frequencies
and the 119895 and 119896 superscripts refer to the GPS satellitesradiating the navigation signal
(ii) 1205821 1205822 are the wavelengths of L1 and L2 signalsrespectively
(iii) 120588119895119896119860119861
= 120588119896
119861minus 120588119896
119860minus 120588119895
119861+ 120588119895
119860is the DD geometric term
between the two receivers
International Journal of Aerospace Engineering 3
(iv) 119868119895119896119860119861= 119868119896
119861minus 119868119896
119860minus 119868119895
119861+ 119868119895
119860is the DD ionospheric delay
on the L1 frequency which is denoted simply by ion-ospheric delay in the following
(v) (1198731)119895119896
119860119861= (1198731)
119896
119861minus (1198731)
119896
119860minus (1198731)
119895
119861+ (1198731)
119895
119860is the
integer ambiguity on the L1 frequency (on L2 whichis analogous)
(vi) 1205781119895119896
119860119861= 1205781119896
119861minus 1205781119896
119860minus 1205781119895
119861+ 1205781119895
119860is the 119875
1noise term on
the L1 frequency (on L2 which is analogous)(vii) 1205731
119895119896
119860119861= 1205731119896
119861minus 1205731119896
119860minus 1205731119895
119861+ 1205731119895
119860is the 119871
1noise term on
the L1 frequency (on L2 which is analogous)Each of the four observables in (4) is assumed to be indepen-dent from the other ones However the 119899 DDmeasurementsof the same kind at a certain time epoch are mutuallycorrelated due to the presence of the pivot satellite in allthe measurements More precisely denoting generically by119883the observation type that is 119883 = 119875
1 119871
2 and by 120590
119883its
standard deviation we have
cov[
[
[
[
(119883)01119860119861
sdot sdot sdot
(119883)0119899119860119861
]
]
]
]
= 1205902119883119863 119863 =(
4 2 sdot sdot sdot 22 4 2 d
2 sdot sdot sdot sdot sdot sdot 4
) (5)
32 Ionospheric Free Combination The most common com-bination for eliminating the ionospheric delay referred toas Ionosphere-Free (IF) [21] is concerned with combiningobservations of the same type on the two carrier frequenciesexploiting the frequency dependence of the first-order iono-spheric delay effect More precisely the IF combinations areobtained as
119883IF =119891221198832 minus 119891
211198831
11989122 minus 119891
21
=
12057421198832 minus 11988311205742minus 1
(6)
Thus two IF observables per each DD couple 119895119896 out of thefour measurements in (4) are
(119875IF)119895119896
119860119861=
11 minus 1205742
[(1198751)119895119896
119860119861minus 120574
2(1198752)119895119896
119860119861] (7)
(119871 IF)119895119896
119860119861=
11 minus 1205742
[(1198711)119895119896
119860119861minus 120574
2(1198712)119895119896
119860119861] (8)
The IF observationmodel can be obtained combining (4) (6)and (7) which yields
(119875IF)119895119896
119860119861= 120588119895119896
119860119861+ (120578IF)
119895119896
119860119861
(119871 IF)119895119896
119860119861= 120588119895119896
119860119861+
11 minus 1205742
[1205821 (1198731)119895119896
119860119861minus 120574
21205822 (1198732)
119895119896
119860119861]
+ (120573IF)119895119896
119860119861
(9)
Since the observation types are assumed to be independentassuming white Gaussian measurements noises the IF com-binations are affected by Gaussian white noise with variance
Var [(119883IF)119895119896
119860119861] = 4
12059021198831 + 120574
412059021198832
(1 minus 1205742)2 119883 = 119875 119871 (10)
Hence the noise is increased compared to the originaluncombined observations
33 GRAPHIC Combinations GRAPHIC combinationsexploit the asymmetry of the ionospheric effect on groupand phase propagation [22] In practice they combinepseudorange and carrier-phase measurements on eachfrequency as follows
(1198661)119895119896
119860119861= 05 [(1198751)
119895119896
119860119861+ (1198711)
119895119896
119860119861]
(1198662)119895119896
119860119861= 05 [(1198752)
119895119896
119860119861+ (1198712)
119895119896
119860119861]
(11)
From the above equations the GRAPHIC observationmodeland variance read
(1198661)119895119896
119860119861= 120588119895119896
119860119861+
12058212(1198731)119895119896
119860119861+ (1206011)
119895119896
119860119861
(1198662)119895119896
119860119861= 120588119895119896
119860119861+
12058222(1198732)119895119896
119860119861+ (1206012)
119895119896
119860119861
Var [(119866119894)119895119896
119860119861] = 120590
2119875119894+120590
2119871119894 119894 = 1 2
(12)
where 1206011 1206012 indicate the noise terms of 1198661and 119866
2combina-
tions respectively
34 Melbourne-Wubbena Combinations Melbourne-Wub-bena (MW) combinations combine all four observable typesfor cancelling out the ionospheric delay [23 24] They buildupon the definition of the wide and narrow lane (NL)wavelengths
120582WL =119888
1198911 minus 1198912
120582NL =119888
1198911 + 1198912
(13)
where 119888 is the speed of light in vacuum The MW combina-tions are obtained as
(MW1015840)119895119896
119860119861
= 120582WL [(1198711)119895119896
119860119861
1205821minus
(1198712)119895119896
119860119861
1205822]
minus120582NL [(1198751)119895119896
119860119861
1205821+
(1198752)119895119896
119860119861
1205822]
(14)
and have the following observation model and variance
(MW)119895119896119860119861= 120582WL [(119873WL)
119895119896
119860119861] +120596119895119896
119860119861
(119873WL)119895119896
119860119861= (1198731)
119895119896
119860119861minus (1198732)
119895119896
119860119861
Var [(MW)119895119896119860119861] = 41205822NL(
12059021198751
12058221+
12059021198752
12058222)
+ 41205822WL(12059021198711
12058221+
12059021198712
12058222)
(15)
where 120596 represents the noise term of the combination
4 International Journal of Aerospace Engineering
Table 1 Expected and estimated standard deviations of the various combinations for 120588119895119896 estimation (NA not available)
1198751
1198752
1198711 1198712
119871 IF 1198661
1198662
119875IF MW
Formula 12059021198751
12059021198752
12059021198711= 120590
21198712
2radic12059021198711+ 120574
412059021198712
(1 minus 1205742)2radic120590
21198751+ 120590
21198711
radic12059021198752+ 120590
21198712
2radic12059021198751+ 120574
412059021198752
(1 minus 1205742)2NA
Unit m M m m m m m mExample 1 0150 0200 0010 0060 0150 0200 0983 NAExample 2 0100 0150 0005 0030 0100 0150 0689 NAExample 3 0100 0150 0001 0006 0100 0150 0689 NAGRACE data 0005 0082 0149 0708 NA(Jan 09)
Table 2 Expected and estimated standard deviations of the various combinations for1198731
119895119896 estimation (NA not available)
1198751 1198752 1198711 1198712 119871 IF 1198661 1198662 119875IF MW
Formula 12059021198751
12059021198752
12059021198711= 120590
21198712
2radic12059021198711+ 120574
412059021198712
1205821 (1 minus 1205742)radic
21205821(120590
21198751+ 120590
21198711) NA 2radic
1205822NL
120582WL(
12059021198751
12058221+
12059021198752
12058222) + 120582WL (
12059021198711
12058221+
12059021198712
12058222)
Unit m m m Cycles Cycles Cycles CyclesExample 1 0150 0200 0010 0123 1580 NA 0312Example 2 0100 0150 0005 0061 1052 NA 0211Example 3 0100 0150 0001 0012 1051 NA 0201GRACE data 0010 0862 NA 0194(Jan 09)
4 Ionosphere-Free Relative Positioning
This section is concerned with establishing which of themeasurement combinations presented in Section 3 is suitablefor computing the relative position of the two receivers inlong baseline applications The measurement combinationsavailable with no ionospheric effects are the 119899 119875IF combina-tions the 119899 119871 IF combinations the 119899GRAPHIC combinationson L1 and L2 and the 119899 MW combinations for a totalof 5n measurements However the 5119899 measurements arenot linearly independent In particular each group of 5observables per each of the 119899 DD couples can be seen as alinear transformation of the 4 uncombined measurementsof (4) More precisely the cancellation of the ionospherefrom (4) can be seen as a linear projection of the 4-dimensional measurement vector [119875
1 1198752 1198711 1198712]119879 onto a 3-
dimensional hyperplane This implies that no more thanthree linear combinations of the four dimensional vectorexist being linearly independent and thus suitable for use asmeasurement vector in an EKF In addition whatever set ofthree linearly independent vectors lying on the hyperplanecan be used as a basis for describing all the vectors belongingto the hyperplane Even though any of such bases would yieldtheoretically equivalent positioning solutions significant dif-ferences exist in practical applications due to unmodeledsystematic errors In order to find such ldquobestrdquo basis its
performance in accurately estimating both the geometricterm and the cycle ambiguity is analyzed A natural indicatorto evaluate the accuracy achieved by a specific measurementcombination is the standard deviation (STD) of the noiseaffecting the measurements
Hence a specific analysis has been performed Startingfrom different candidate noise levels for the uncombinedmeasurements that is 119875
1 1198752 1198711 and 119871
2(see the first
three columns in Table 1) reflecting typical performanceof spaceborne GPS receivers the expected STD for theestimation of the geometric term 120588
119895119896 is derived as listedin Table 1 The rationale of this analysis is that differentcombinations of GPS measurements may modify that iseither amply or reduce the uncertainty of the geometricterm Combinations able to reduce this uncertainty should bepreferred for implementation in an ionosphere-free EKFThesame analysis is then repeated for the integer ambiguity onL1 Again the smaller the uncertainty on this ambiguity thelarger the probability to correctly fix it The results are showninTable 2 In this case a scale factor is introduced to representthe STD of combinedmeasurements as a fraction of L1 cyclesIn addition to this theoretical analysis the dispersion ofactual GRACE data is computed and the relevant STD iscalculated (see the last row in Tables 1 and 2) for gainingfurther insight into the true-world accuracy of the variouscombinations
International Journal of Aerospace Engineering 5
According to the results presented in Tables 1 and 2 theset of measurements including 119871 IF 1198661 and MW combina-tions is the one allowing a higher potential accuracy on boththe DD geometric term and the cycle ambiguities This set ofmeasurements is called set ldquo3119899rdquo in what follows A potentiallimitation of set 3119899 is that cycle ambiguities are present inall the three observation models Hence when the numberof fixed ambiguities is smaller than three the observationmodel provides no useful information to the EKF which isthus forced to rely only on its propagation model In thisparticular situation the EKF is expected to perform poorlyTo cope with this problem an additional set is consideredcalled set ldquo4119899rdquo and made of 119871 IF 1198661 and MW combinationsplus the uncombined 119875
1measurement The addition of 119875
1
observations allows the filter to rely on relative positioninginformation even when less than three cycle ambiguities arefixed
Because the various combinations have different observa-tion models selecting different sets of measurements affectsthe observability of the EKF state vector differently Theobservability of the system at hand is extremely involvedto be analyzed Indeed the dynamical system is nonlinearand evolves on a time-varying trajectory Its linearization isthus time-varying and depends on the state estimate Theobservation model is nonlinear due to the DD geometryterms Its linearization depends on the state trajectory andthus it is time-varying as well Both the dynamical andthe observation models depend on an exogenous vectorparameter (eg the absolute position of one of the receivers)[17] Finally both the EKF state vector and the measurementsdepend on the number of DD couples 119899 which is time-varying as well In such a condition instead of developinga complicated observability analysis a different approach ispursued which is based on numerically evaluating the EKFperformances using both set 3119899 and set 4119899 as shown in thenext section
41 No-Iono EKF Dynamic Model The no-iono EKF statevector is defined as
119909 isin R6+2119899
119909 = (b b NWL N1)119879
(16)
Concerning the process model the baseline dynamics isdescribed by the nonlinear relative Keplerian model with J2effects included This model is equal to the one used in the
VTEC-based EKF [17] and is denoted at the time epoch 119905119896as
follows
b = 119891 (b b r119860)
(
bb)
119896+1
= Φ119887119896(
bb)
119896
+w119887
119864 (w119887w119879119887) = 119876
119887
(17)
where 119891 is the nonlinear baseline propagation function r119860
denotes the receiver 119860 position vector in ECEF Φ is thetime-discrete baseline propagation matrix w
119887is the baseline
process noise vector and E indicates themathematical expec-tation
Cycle ambiguities are instead assumed to be constantHowever a small process noise w
119873might be injected letting
them be modeled as a random constant plus random walkThe model is equal to the one used in the VTEC-basedEKF [17] and is denoted by (1
119899is the 119899-by-119899 identity
matrix)
(
NWL
N1) = 0
(
NWL
N1)
119896+1= 1119899(
NWL
N1)
119896
+w119873
119864 (w119873w119879119873) = 119876
119873= 120590
21198731119899
(18)
42 No-Iono EKF Observation Model The two differentobservation models share some common structure whichis discussed first Then details on each of the two modelswill be given The no-iono EKF measurement vector 119910 ismade of a series of measurement combinations depend-ing on the chosen set Each measurement combinationstacks together the combinations for each of the 119899 DDcouples
X isin R119899
X = ((119883)01119860119861
sdot sdot sdot (119883)0119899119860119861)
119879
(19)
The covariance matrix of 119910 has a nonsparse structure dueto the presence of the various uncombined measurementsin more combinations and because of the full covariancematrix of each of the uncombined measurements X In orderto have the desired covariance matrix cov(119910) it is possibleto introduce the vector 119911 that stacks the uncombined DDobservations 119875
1 119871
2
119911 = ( (1198751)01119860119861
sdot sdot sdot (1198751)0119899119860119861
(1198752)01119860119861
sdot sdot sdot (1198752)0119899119860119861
(1198711)01119860119861
sdot sdot sdot (1198711)0119899119860119861
(1198712)01119860119861
sdot sdot sdot (1198712)0119899119860119861)
119879
cov (119911) =(
12059021198751119863 0
12059021198752119863
1205902119871119863
0 1205902119871119863
)
(20)
6 International Journal of Aerospace Engineering
The chosen combined measurements set can be expressed asa linear function of the uncombined measurement vector 119911by means of a matrix 119879 depending on the chosen set Thematrix cov(119910) can be obtained by cov(119911) applying the lineartransformation
119910 = 119879119911
119877 = cov (119910) = 119879 cov (119911) 119879119879(21)
The observation model relating the EKF state to the observ-ables is nonlinear due to the geometric term The geometricterm is independent from the chosen measurement set andthus is discussed herein The 119899 DD geometric terms arerelated to the baseline by the following equations (119877119894 denotesthe 119894th GPS satellite position vector in ECEF)
120588119895119896
119860119861=
10038171003817100381710038171003817R119896 minus (r
119860+ b)1003817100381710038171003817
1003817minus
10038171003817100381710038171003817R119896 minus r
119860
10038171003817100381710038171003817minus
10038171003817100381710038171003817R119895 minus (r
119860+ b)1003817100381710038171003817
1003817
+
10038171003817100381710038171003817R119895 minus r
119860
10038171003817100381710038171003817
(22)
The nonlinear observation model and the linear delta obser-vationmodel needed for the computation of theKalman gainin the EKF are obtained by linearization of the propagatedstate vector and it can be expressed generically as
119910 isin R3119899 119910 = ℎ (119909)
Δ119910 isin R3119899 Δ119910 = 119867Δ119909
(23)
Thus at each time epoch from the observation equationsthe measurement vector 119910 is computed combining uncom-bined measurements The choice of the measurement set toconsider thus changes only the following (1) 119879 matrix forobtaining the EKF combinedmeasurement vector 119910 from theuncombined one 119911 (2) ℎ(119909) nonlinear observation functionand (3) 119867matrix of the linearized observation model Theseitems are discussed in the following subsections for eachmeasurement set
421 Set 3119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879
=(
(
0119899
0119899
11 minus 1205742
1119899minus
1205742
1 minus 12057421119899
121119899
0119899
121119899
0119899
minus
120582NL1205821
1119899minus
120582NL1205822
1119899
120582WL1205821
1119899
minus
120582WL1205822
1119899
)
)
ℎ (119909)
= (
120588119895
119860119861(b)
120588119895
119860119861(b)
0119899times1
)
+(
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
0119899
120582121119899
120582WL1119899 0119899
)(
NWL
N1)
119867 =(
nablab120588119895
11986011986103
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
nablab120588119895
11986011986103 0
119899
120582121119899
03 03 120582WL1119899 0119899
)
(24)
where 120588119895119860119861
vector stacks together 119899DD geometric termsnablab isthe gradient operator with respect to the baseline vector and0119899is the 119899-by-119899 null matrix
422 Set 4119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879 = (
1119899
0119899
0119899
0119899
1198793119899)
ℎ (119909) = (120588119895
119860119861(b)
ℎ3119899 (119909))
119867 = (nablab120588119895
11986011986103 0119899
0119899
1198673119899)
(25)
where the subscript ldquo3119899rdquo is used to indicate matrix andfunctions relevant to set 3119899 It is worth noting that sincethe ionospheric delay is cancelled and not included in thestate vector the implemented observation model for 119875
1
measurement is
(1198751)119895119896
119860119861= 120588119895119896
119860119861+ 120578119895119896
1119860119861 (26)
Comparing (4) to (26) it is evident that set 4119899 implicitlyassumes the DD ionospheric delay modelled as an additionalGaussian white noise affecting the 119875
1measurements In other
words considering that the DD ionospheric delay is onlya small fraction of the total ionospheric delays the DD1198751observable noise is modelled as if the ionospheric delay
was not time correlated but included within the white noiseerror This approach resembles that one used in [7 14] whereionospheric delays are modelled as random walk processescharacterized by large process noises and correlation times inthe order of the filter time step
5 Results
The reference EKF and the no-iono solutions have beenrun on GRACE data Comparisons among the solutionsare performed looking at the baseline magnitude estimationerror and at the capability to obtain correct estimates of theinteger ambiguities Both of them are estimated thanks to thehigh accuracy reference solutions which can be computedprocessing GRACE data [8] As expected application to mildand moderate ionospheric conditions not shown herein for
International Journal of Aerospace Engineering 7
0 1 2 3 4 5 6 7 8
minus2
0
2
Reference solutionmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
Time (s)
Time (s)
CorrectWrongUnknownFixed
times104
times104
Num
ber o
f IA
b
m
Figure 1 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for the reference solution
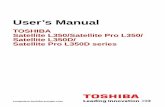
brevity suggest that the filter with Learrsquos model is capable toachieve a baseline estimation error which is the half of theno-iono approach (both set 3119899 and set 4119899) This behaviourchanges under strong ionospheric activity In order to showthis DOY286 (October 13th) 2011 has been selected for theanalysis in which the two GRACE spacecrafts are separatedof more than 200 km and ionospheric activity is extremelyintense Figures 1ndash3 report the baselinemagnitude estimationerror and the IA estimation performance for the referencesolution and the no-iono solutions respectively Specificallyonly L1 estimation performance is shown because wide lanefail rates are significantly lower than those on L1
Figure 1 shows that under strong ionospheric activityLearrsquos model is not able to support the integer estimationso a significant number of ambiguities is wrong and baselinemagnitude estimation errors larger than 1moccur IA estima-tion performance increases notably when set 3119899 is considered(see Figure 2) and the baseline estimation error reduces todecimetre scale in this case Finally with reference to set4119899 it is evident that the addition of the 119875
1measurements
is not a successful strategy when the ionospheric activityis intense Indeed DD ionospheric delays dominate over1198751measurement noise and so they cannot be modelled as
additional Gaussian white noise
6 Concluding Remarks
This paper has compared various strategies for compensat-ing ionospheric delays in long baseline relative position-ing applications for LEO spacecraft using dual-frequencyCDGPS techniques Based on a relative positioning techniquepreviously developed by the authors problem settings thatdo not require ionospheric delays estimation have beeninvestigated The ionosphere-free alternatives have been also
Time (s)
Time (s)0 1 2 3 4 5 6 7 8
No-iono solution with ldquo3nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
times104
times104
minus2
0
2
Num
ber o
f IA
b
m
CorrectWrongUnknownFixed
Figure 2 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 3119899
Time (s)
No-iono solution with ldquo4nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 8minus3
minus2
minus1
0
1
2
3
0 1 2 3 4 5 6 7 80
2
4
6
8
10
Num
ber o
f IA
times104
Time (s) times104
b
m
CorrectWrongUnknownFixed
Figure 3 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 4119899
compared with a reference solution making use of a stan-dard ionospheric delay model for spaceborne applicationsoriginally developed by Lear Results suggest that among thepossible alternatives and under strong ionospheric activitybest performance is achieved using the observation model
8 International Journal of Aerospace Engineering
made of ionosphere-free combinations of carrier-phase mea-surements GRAPHIC combinations on the L1 frequencyand Melbourne-Wubbena combinations Future work willdeal with the extension of these results to a more completedata set including different levels of the ionospheric activityThe ultimate goal is the introduction of quantitative tools toguide the selection between model-based and ionosphere-free approaches depending on the ionospheric activity andthe available ionospheric models
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The activities of Urbano Tancredi in this work have beencarried out also with the contribution of Regione Campaniain the framework of the ArchAero project financed bythe Regional Law n52002 for the promotion of scientificresearch in Campania
References
[1] S Leung and O Montenbruck ldquoReal-time navigation of for-mation-flying spacecraft using global-positioning-systemmea-surementsrdquo Journal of Guidance Control andDynamics vol 28no 2 pp 226ndash235 2005
[2] O Montenbruck T Ebinuma E G Lightsey and S Leung ldquoAreal-time kinematic GPS sensor for spacecraft relative naviga-tionrdquo Aerospace Science and Technology vol 6 no 6 pp 435ndash449 2002
[3] M L Psiaki and S Mohiuddin ldquoModeling analysis and sim-ulation of GPS carrier phase for spacecraft relative navigationrdquoJournal of Guidance Control and Dynamics vol 30 no 6 pp1628ndash1639 2007
[4] F Zuiani and M Vasile ldquoPreliminary design of debris removalmissions by means of simplified models for low-thrust many-revolution transfersrdquo International Journal of Aerospace Engi-neering vol 2012 Article ID 836250 22 pages 2012
[5] P M Xavier A Vıctor and S Santiago ldquoEnhancing the devel-opment of a particular network of aerodromes using EGNOSrdquoin Proceedings of the 56th International Astronautical CongressInternational Astronautical Federation Fukouka Japan 2005
[6] D JWing andW B Cotton ldquoFor spacious skies self-separationwith lsquoautonomous flight rulesrsquo in US domestic airspacerdquo inProceedings of the 11th AIAA Aviation Technology Integrationand Operations (ATIO) Conference September 2011
[7] R Kroes O Montenbruck W Bertiger and P Visser ldquoPreciseGRACE baseline determination using GPSrdquo GPS Solutions vol9 no 1 pp 21ndash31 2005
[8] U Tancredi A Renga and M Grassi ldquoIonospheric path delaymodels for spaceborne GPS receivers flying in formation withlarge baselinesrdquo Advances in Space Research vol 48 no 3 pp507ndash520 2011
[9] Y Gu G Campa and M Innocenti ldquoFormation flight controlrdquoInternational Journal of Aerospace Engineering vol 2011 ArticleID 798981 2 pages 2011
[10] T Dautermann ldquoCivil air navigation using GNSS enhancedby wide area satellite based augmentation systemsrdquo Progress inAerospace Sciences vol 67 pp 51ndash62 2014
[11] Y Xu W Sun and P Li ldquoA miniature integrated navigationsystem for rotary-wing unmanned aerial vehiclesrdquo InternationalJournal of Aerospace Engineering vol 2014 Article ID 74894013 pages 2014
[12] M-S Huang R M Narayanan Y Zhang and A FeinbergldquoTracking of noncooperative airborne targets using ADS-Bsignal and radar sensingrdquo International Journal of AerospaceEngineering vol 2013 Article ID 521630 12 pages 2013
[13] L Forlenza G Fasano D Accardo and A Moccia ldquoFlightperformance analysis of an image processing algorithm forintegrated sense-and-avoid systemsrdquo International Journal ofAerospace Engineering vol 2012 Article ID 542165 8 pages2012
[14] R Kroes Precise relative positioning of formation flying space-craft using GPS [PhD thesis] Delft University of TechnologyDelft The Netherlands 2006
[15] S-C Wu and Y E Bar-Sever ldquoReal-time sub-cm differentialorbit determination of two low-earth orbiters with GPS biasfixingrdquo inProceedings of the 19th International TechnicalMeetingof the Satellite Division of the Institution of Navigation (IONGNSS rsquo06) pp 2515ndash2522 Fort Worth Tex USA 2006
[16] S T Goh O Abdelkhalik and S A Zekavat ldquoImplementationof a differential geometric filter for spacecraft formation orbitestimationrdquo International Journal of Aerospace Engineering vol2012 Article ID 910496 13 pages 2012
[17] U Tancredi A Renga and M Grassi ldquoReal-time relative posi-tioning of spacecraft over long baselinesrdquo Journal of GuidanceControl and Dynamics vol 37 no 1 pp 47ndash58 2014
[18] T Richert and N El-Sheimy ldquoIonospheric modelingThe key toGNSS ambiguity resolutionrdquo GPS World pp 35ndash40 2005
[19] O Montenbruck M Wermuth and R Kahle ldquoGPS basedrelative navigation for the TanDEM-X missionmdashfirst flightresultsrdquo Navigation Journal of the Institute of Navigation vol58 no 4 pp 293ndash304 2011-2012
[20] B Li S Verhagen and P J G Teunissen ldquoRobustness of GNSSinteger ambiguity resolution in the presence of atmosphericbiasesrdquo GPS Solutions vol 18 no 2 pp 283ndash296 2014
[21] J Farrel andM BarthTheGlobal Positioning Systemand InertialNavigation chapter 5 McGraw-Hill New York NY USA 1999
[22] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications B W Parkinson and J J Spilker Edsvol 2 pp 559ndash592 American Institute of Aeronautics andAstronautics Washington DC USA 1996
[23] W G Melbourne ldquoThe case for ranging in GPS-based geodeticsystemsrdquo in Proceedings of the 1st Intenational Symposium onPrecise Positioning with the Global Positioning System pp 373ndash386 Ockville Md USA 1985
[24] G Wubbena ldquoSoftware developments for geodetic positioningwith GPS using TI 4100 code and carrier measurementsrdquoin Proceedings of the 1st Intenational Symposium on Precisepositioning with the Global Positioning System pp 403ndash412Rockville Md USA 1985
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Aerospace Engineering
In this paper a completely ionosphere-free approachis pursued in which the ionospheric delays are cancelledout by combination of dual frequency GPS measurementsSeveral alternative combinations are investigated based onthe ionosphere-free combination of pseudorange and carrier-phase observables but also on GRoup And PHase Iono-spheric Correction (GRAPHIC) and Melbourne-Wubbenacombinations and thus the best combinations are selectedBased on a relative positioning scheme previously developedby the authors [17] the performance of each approachis quantified over real-world spaceborne GPS data madeavailable by the Gravity Recovery and Climate Experiment(GRACE) mission
The paper is organized as follows First the conventionalapproach is presented in which the ionospheric delays areestimated as part of the state vector through Learrsquos modelThen ionosphere-free observables are derived from the DDobservation models and two different combinations areselected for being integrated in an ionosphere-free formu-lation of the EKF The developed filter is finally tested onGRACE data
2 Ionospheric Delays Estimated byLearrsquos Model
The most common approach for handling the differentialionospheric delays in high accuracy long baseline applica-tions is to estimate the DD ionospheric delays within the EKFmodelling them using random walk processes in the statevector [14 15] This scheme usually integrates an EKF withan Integer Least Squares estimator based on the LAMDBAmethod This approach can be not sufficiently accurate inreal-time on-board implementations when accurate stochas-tic and dynamic models cannot be used In such conditionsa reliable way to proceed is to model the ionospheric delaysthrough the VTEC above the receivers by Learrsquos mappingfunction [1 8] With specific reference to a formation oftwo satellites this approach leads to the following state andmeasurement vectors
x isin R8+2119899
x = (b b VTEC NWL N1)119879
y isin R4119899 y = (P1 P2 L1 L2)
119879
(1)
where b and b are the baseline and the relative velocityvectors expressed in the Earth-Centred Earth-Fixed (ECEF)reference frame and N
1stack together the cycle ambiguities
on the L1 frequency for the 119899 DD couples
N1 isin R119899
N1 = ((1198731)01119860119861
sdot sdot sdot (1198731)0119899119860119861)
119879
(2)
where the pivot satellite that is the reference GPS satelliteselected for calculating DD observables is indicated with 0for simplicity NWL instead stacks together wide-lane cycleambiguities In (1) P indicates DD pseudorange observablesand L represents DD carrier-phase onesThe subscripts 1 and2 stand for L1 and L2GPS frequencies respectively whereas119860and 119861 subscripts refer to the receivers onboard the satellitesFinally VTEC is the vector including the two vertical total
electron contents for the two receivers According to Learrsquosmodel the zero difference ionospheric delay in meters for theGPS satellite 119894 and the receiver 119860 can be written as [1 8]
119868119894
119860=
403m3s2
1198912
1
2037
sin119864119894119860+ radicsin2119864119894
119860+ 0076
VTEC119860 (3)
where 1198911is L1 carrier frequency in Hz VTEC
119860is the (scalar)
vertical total electron content for modeling the ionosphericdelay of the receiver119860 and is expressed in number of electronsper square meter and 119864119894
119860is the elevation of the GPS satellite
119894 with respect to the receiver 119860The main advantage of Learrsquos model is the capability
to predict zero difference ionospheric delays relevant todifferent tracked GPS satellites as a function of a singleunknown parameter (ie VTECA) which is a desirableproperty for navigation filters [1]
This reference model of (1)ndash(3) has shown satisfactoryobservability features [17] since it is capable of deliveringgood estimates of the Integer Ambiguities (IA) even in caseof only 3 DD observations However this VTEC-based EKFhas some inherent accuracy limitations due to its inabilityof rejecting deviations of the true ionosphere from Learrsquosmodel which appear as additional error terms in the baselineestimate [8] In what follows the possibility is discussedof overcoming the limitations of the VTEC-based EKFby deleting the ionospheric delays through measurementcombinations
3 Ionosphere-Free Observables
Dual frequency DD carrier-phase and pseudorange observ-ables can be combined in different ways to generateionosphere-free measurements The complete DD observa-tion model is thus presented before deriving the relevantionosphere-free observables
31 DD Observation Model The DDmeasurements have thefollowing expressions [21]
(1198751)119895119896
119860119861= 120588119895119896
119860119861+ 119868119895119896
119860119861+ 120578119895119896
1119860119861
(1198752)119895119896
119860119861= 120588119895119896
119860119861+ 120574minus2119868119895119896
119860119861+ 120578119895119896
2119860119861
(1198711)119895119896
119860119861= 120588119895119896
119860119861minus 119868119895119896
119860119861+1205821 (1198731)
119895119896
119860119861+120573119895119896
1119860119861
(1198712)119895119896
119860119861= 120588119895119896
119860119861minus 120574minus2119868119895119896
119860119861+1205822 (1198732)
119895119896
119860119861+120573119895119896
2119860119861
(4)
where
(i) 120574 = 11989121198911is ratio between the L2 and L1 frequencies
and the 119895 and 119896 superscripts refer to the GPS satellitesradiating the navigation signal
(ii) 1205821 1205822 are the wavelengths of L1 and L2 signalsrespectively
(iii) 120588119895119896119860119861
= 120588119896
119861minus 120588119896
119860minus 120588119895
119861+ 120588119895
119860is the DD geometric term
between the two receivers
International Journal of Aerospace Engineering 3
(iv) 119868119895119896119860119861= 119868119896
119861minus 119868119896
119860minus 119868119895
119861+ 119868119895
119860is the DD ionospheric delay
on the L1 frequency which is denoted simply by ion-ospheric delay in the following
(v) (1198731)119895119896
119860119861= (1198731)
119896
119861minus (1198731)
119896
119860minus (1198731)
119895
119861+ (1198731)
119895
119860is the
integer ambiguity on the L1 frequency (on L2 whichis analogous)
(vi) 1205781119895119896
119860119861= 1205781119896
119861minus 1205781119896
119860minus 1205781119895
119861+ 1205781119895
119860is the 119875
1noise term on
the L1 frequency (on L2 which is analogous)(vii) 1205731
119895119896
119860119861= 1205731119896
119861minus 1205731119896
119860minus 1205731119895
119861+ 1205731119895
119860is the 119871
1noise term on
the L1 frequency (on L2 which is analogous)Each of the four observables in (4) is assumed to be indepen-dent from the other ones However the 119899 DDmeasurementsof the same kind at a certain time epoch are mutuallycorrelated due to the presence of the pivot satellite in allthe measurements More precisely denoting generically by119883the observation type that is 119883 = 119875
1 119871
2 and by 120590
119883its
standard deviation we have
cov[
[
[
[
(119883)01119860119861
sdot sdot sdot
(119883)0119899119860119861
]
]
]
]
= 1205902119883119863 119863 =(
4 2 sdot sdot sdot 22 4 2 d
2 sdot sdot sdot sdot sdot sdot 4
) (5)
32 Ionospheric Free Combination The most common com-bination for eliminating the ionospheric delay referred toas Ionosphere-Free (IF) [21] is concerned with combiningobservations of the same type on the two carrier frequenciesexploiting the frequency dependence of the first-order iono-spheric delay effect More precisely the IF combinations areobtained as
119883IF =119891221198832 minus 119891
211198831
11989122 minus 119891
21
=
12057421198832 minus 11988311205742minus 1
(6)
Thus two IF observables per each DD couple 119895119896 out of thefour measurements in (4) are
(119875IF)119895119896
119860119861=
11 minus 1205742
[(1198751)119895119896
119860119861minus 120574
2(1198752)119895119896
119860119861] (7)
(119871 IF)119895119896
119860119861=
11 minus 1205742
[(1198711)119895119896
119860119861minus 120574
2(1198712)119895119896
119860119861] (8)
The IF observationmodel can be obtained combining (4) (6)and (7) which yields
(119875IF)119895119896
119860119861= 120588119895119896
119860119861+ (120578IF)
119895119896
119860119861
(119871 IF)119895119896
119860119861= 120588119895119896
119860119861+
11 minus 1205742
[1205821 (1198731)119895119896
119860119861minus 120574
21205822 (1198732)
119895119896
119860119861]
+ (120573IF)119895119896
119860119861
(9)
Since the observation types are assumed to be independentassuming white Gaussian measurements noises the IF com-binations are affected by Gaussian white noise with variance
Var [(119883IF)119895119896
119860119861] = 4
12059021198831 + 120574
412059021198832
(1 minus 1205742)2 119883 = 119875 119871 (10)
Hence the noise is increased compared to the originaluncombined observations
33 GRAPHIC Combinations GRAPHIC combinationsexploit the asymmetry of the ionospheric effect on groupand phase propagation [22] In practice they combinepseudorange and carrier-phase measurements on eachfrequency as follows
(1198661)119895119896
119860119861= 05 [(1198751)
119895119896
119860119861+ (1198711)
119895119896
119860119861]
(1198662)119895119896
119860119861= 05 [(1198752)
119895119896
119860119861+ (1198712)
119895119896
119860119861]
(11)
From the above equations the GRAPHIC observationmodeland variance read
(1198661)119895119896
119860119861= 120588119895119896
119860119861+
12058212(1198731)119895119896
119860119861+ (1206011)
119895119896
119860119861
(1198662)119895119896
119860119861= 120588119895119896
119860119861+
12058222(1198732)119895119896
119860119861+ (1206012)
119895119896
119860119861
Var [(119866119894)119895119896
119860119861] = 120590
2119875119894+120590
2119871119894 119894 = 1 2
(12)
where 1206011 1206012 indicate the noise terms of 1198661and 119866
2combina-
tions respectively
34 Melbourne-Wubbena Combinations Melbourne-Wub-bena (MW) combinations combine all four observable typesfor cancelling out the ionospheric delay [23 24] They buildupon the definition of the wide and narrow lane (NL)wavelengths
120582WL =119888
1198911 minus 1198912
120582NL =119888
1198911 + 1198912
(13)
where 119888 is the speed of light in vacuum The MW combina-tions are obtained as
(MW1015840)119895119896
119860119861
= 120582WL [(1198711)119895119896
119860119861
1205821minus
(1198712)119895119896
119860119861
1205822]
minus120582NL [(1198751)119895119896
119860119861
1205821+
(1198752)119895119896
119860119861
1205822]
(14)
and have the following observation model and variance
(MW)119895119896119860119861= 120582WL [(119873WL)
119895119896
119860119861] +120596119895119896
119860119861
(119873WL)119895119896
119860119861= (1198731)
119895119896
119860119861minus (1198732)
119895119896
119860119861
Var [(MW)119895119896119860119861] = 41205822NL(
12059021198751
12058221+
12059021198752
12058222)
+ 41205822WL(12059021198711
12058221+
12059021198712
12058222)
(15)
where 120596 represents the noise term of the combination
4 International Journal of Aerospace Engineering
Table 1 Expected and estimated standard deviations of the various combinations for 120588119895119896 estimation (NA not available)
1198751
1198752
1198711 1198712
119871 IF 1198661
1198662
119875IF MW
Formula 12059021198751
12059021198752
12059021198711= 120590
21198712
2radic12059021198711+ 120574
412059021198712
(1 minus 1205742)2radic120590
21198751+ 120590
21198711
radic12059021198752+ 120590
21198712
2radic12059021198751+ 120574
412059021198752
(1 minus 1205742)2NA
Unit m M m m m m m mExample 1 0150 0200 0010 0060 0150 0200 0983 NAExample 2 0100 0150 0005 0030 0100 0150 0689 NAExample 3 0100 0150 0001 0006 0100 0150 0689 NAGRACE data 0005 0082 0149 0708 NA(Jan 09)
Table 2 Expected and estimated standard deviations of the various combinations for1198731
119895119896 estimation (NA not available)
1198751 1198752 1198711 1198712 119871 IF 1198661 1198662 119875IF MW
Formula 12059021198751
12059021198752
12059021198711= 120590
21198712
2radic12059021198711+ 120574
412059021198712
1205821 (1 minus 1205742)radic
21205821(120590
21198751+ 120590
21198711) NA 2radic
1205822NL
120582WL(
12059021198751
12058221+
12059021198752
12058222) + 120582WL (
12059021198711
12058221+
12059021198712
12058222)
Unit m m m Cycles Cycles Cycles CyclesExample 1 0150 0200 0010 0123 1580 NA 0312Example 2 0100 0150 0005 0061 1052 NA 0211Example 3 0100 0150 0001 0012 1051 NA 0201GRACE data 0010 0862 NA 0194(Jan 09)
4 Ionosphere-Free Relative Positioning
This section is concerned with establishing which of themeasurement combinations presented in Section 3 is suitablefor computing the relative position of the two receivers inlong baseline applications The measurement combinationsavailable with no ionospheric effects are the 119899 119875IF combina-tions the 119899 119871 IF combinations the 119899GRAPHIC combinationson L1 and L2 and the 119899 MW combinations for a totalof 5n measurements However the 5119899 measurements arenot linearly independent In particular each group of 5observables per each of the 119899 DD couples can be seen as alinear transformation of the 4 uncombined measurementsof (4) More precisely the cancellation of the ionospherefrom (4) can be seen as a linear projection of the 4-dimensional measurement vector [119875
1 1198752 1198711 1198712]119879 onto a 3-
dimensional hyperplane This implies that no more thanthree linear combinations of the four dimensional vectorexist being linearly independent and thus suitable for use asmeasurement vector in an EKF In addition whatever set ofthree linearly independent vectors lying on the hyperplanecan be used as a basis for describing all the vectors belongingto the hyperplane Even though any of such bases would yieldtheoretically equivalent positioning solutions significant dif-ferences exist in practical applications due to unmodeledsystematic errors In order to find such ldquobestrdquo basis its
performance in accurately estimating both the geometricterm and the cycle ambiguity is analyzed A natural indicatorto evaluate the accuracy achieved by a specific measurementcombination is the standard deviation (STD) of the noiseaffecting the measurements
Hence a specific analysis has been performed Startingfrom different candidate noise levels for the uncombinedmeasurements that is 119875
1 1198752 1198711 and 119871
2(see the first
three columns in Table 1) reflecting typical performanceof spaceborne GPS receivers the expected STD for theestimation of the geometric term 120588
119895119896 is derived as listedin Table 1 The rationale of this analysis is that differentcombinations of GPS measurements may modify that iseither amply or reduce the uncertainty of the geometricterm Combinations able to reduce this uncertainty should bepreferred for implementation in an ionosphere-free EKFThesame analysis is then repeated for the integer ambiguity onL1 Again the smaller the uncertainty on this ambiguity thelarger the probability to correctly fix it The results are showninTable 2 In this case a scale factor is introduced to representthe STD of combinedmeasurements as a fraction of L1 cyclesIn addition to this theoretical analysis the dispersion ofactual GRACE data is computed and the relevant STD iscalculated (see the last row in Tables 1 and 2) for gainingfurther insight into the true-world accuracy of the variouscombinations
International Journal of Aerospace Engineering 5
According to the results presented in Tables 1 and 2 theset of measurements including 119871 IF 1198661 and MW combina-tions is the one allowing a higher potential accuracy on boththe DD geometric term and the cycle ambiguities This set ofmeasurements is called set ldquo3119899rdquo in what follows A potentiallimitation of set 3119899 is that cycle ambiguities are present inall the three observation models Hence when the numberof fixed ambiguities is smaller than three the observationmodel provides no useful information to the EKF which isthus forced to rely only on its propagation model In thisparticular situation the EKF is expected to perform poorlyTo cope with this problem an additional set is consideredcalled set ldquo4119899rdquo and made of 119871 IF 1198661 and MW combinationsplus the uncombined 119875
1measurement The addition of 119875
1
observations allows the filter to rely on relative positioninginformation even when less than three cycle ambiguities arefixed
Because the various combinations have different observa-tion models selecting different sets of measurements affectsthe observability of the EKF state vector differently Theobservability of the system at hand is extremely involvedto be analyzed Indeed the dynamical system is nonlinearand evolves on a time-varying trajectory Its linearization isthus time-varying and depends on the state estimate Theobservation model is nonlinear due to the DD geometryterms Its linearization depends on the state trajectory andthus it is time-varying as well Both the dynamical andthe observation models depend on an exogenous vectorparameter (eg the absolute position of one of the receivers)[17] Finally both the EKF state vector and the measurementsdepend on the number of DD couples 119899 which is time-varying as well In such a condition instead of developinga complicated observability analysis a different approach ispursued which is based on numerically evaluating the EKFperformances using both set 3119899 and set 4119899 as shown in thenext section
41 No-Iono EKF Dynamic Model The no-iono EKF statevector is defined as
119909 isin R6+2119899
119909 = (b b NWL N1)119879
(16)
Concerning the process model the baseline dynamics isdescribed by the nonlinear relative Keplerian model with J2effects included This model is equal to the one used in the
VTEC-based EKF [17] and is denoted at the time epoch 119905119896as
follows
b = 119891 (b b r119860)
(
bb)
119896+1
= Φ119887119896(
bb)
119896
+w119887
119864 (w119887w119879119887) = 119876
119887
(17)
where 119891 is the nonlinear baseline propagation function r119860
denotes the receiver 119860 position vector in ECEF Φ is thetime-discrete baseline propagation matrix w
119887is the baseline
process noise vector and E indicates themathematical expec-tation
Cycle ambiguities are instead assumed to be constantHowever a small process noise w
119873might be injected letting
them be modeled as a random constant plus random walkThe model is equal to the one used in the VTEC-basedEKF [17] and is denoted by (1
119899is the 119899-by-119899 identity
matrix)
(
NWL
N1) = 0
(
NWL
N1)
119896+1= 1119899(
NWL
N1)
119896
+w119873
119864 (w119873w119879119873) = 119876
119873= 120590
21198731119899
(18)
42 No-Iono EKF Observation Model The two differentobservation models share some common structure whichis discussed first Then details on each of the two modelswill be given The no-iono EKF measurement vector 119910 ismade of a series of measurement combinations depend-ing on the chosen set Each measurement combinationstacks together the combinations for each of the 119899 DDcouples
X isin R119899
X = ((119883)01119860119861
sdot sdot sdot (119883)0119899119860119861)
119879
(19)
The covariance matrix of 119910 has a nonsparse structure dueto the presence of the various uncombined measurementsin more combinations and because of the full covariancematrix of each of the uncombined measurements X In orderto have the desired covariance matrix cov(119910) it is possibleto introduce the vector 119911 that stacks the uncombined DDobservations 119875
1 119871
2
119911 = ( (1198751)01119860119861
sdot sdot sdot (1198751)0119899119860119861
(1198752)01119860119861
sdot sdot sdot (1198752)0119899119860119861
(1198711)01119860119861
sdot sdot sdot (1198711)0119899119860119861
(1198712)01119860119861
sdot sdot sdot (1198712)0119899119860119861)
119879
cov (119911) =(
12059021198751119863 0
12059021198752119863
1205902119871119863
0 1205902119871119863
)
(20)
6 International Journal of Aerospace Engineering
The chosen combined measurements set can be expressed asa linear function of the uncombined measurement vector 119911by means of a matrix 119879 depending on the chosen set Thematrix cov(119910) can be obtained by cov(119911) applying the lineartransformation
119910 = 119879119911
119877 = cov (119910) = 119879 cov (119911) 119879119879(21)
The observation model relating the EKF state to the observ-ables is nonlinear due to the geometric term The geometricterm is independent from the chosen measurement set andthus is discussed herein The 119899 DD geometric terms arerelated to the baseline by the following equations (119877119894 denotesthe 119894th GPS satellite position vector in ECEF)
120588119895119896
119860119861=
10038171003817100381710038171003817R119896 minus (r
119860+ b)1003817100381710038171003817
1003817minus
10038171003817100381710038171003817R119896 minus r
119860
10038171003817100381710038171003817minus
10038171003817100381710038171003817R119895 minus (r
119860+ b)1003817100381710038171003817
1003817
+
10038171003817100381710038171003817R119895 minus r
119860
10038171003817100381710038171003817
(22)
The nonlinear observation model and the linear delta obser-vationmodel needed for the computation of theKalman gainin the EKF are obtained by linearization of the propagatedstate vector and it can be expressed generically as
119910 isin R3119899 119910 = ℎ (119909)
Δ119910 isin R3119899 Δ119910 = 119867Δ119909
(23)
Thus at each time epoch from the observation equationsthe measurement vector 119910 is computed combining uncom-bined measurements The choice of the measurement set toconsider thus changes only the following (1) 119879 matrix forobtaining the EKF combinedmeasurement vector 119910 from theuncombined one 119911 (2) ℎ(119909) nonlinear observation functionand (3) 119867matrix of the linearized observation model Theseitems are discussed in the following subsections for eachmeasurement set
421 Set 3119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879
=(
(
0119899
0119899
11 minus 1205742
1119899minus
1205742
1 minus 12057421119899
121119899
0119899
121119899
0119899
minus
120582NL1205821
1119899minus
120582NL1205822
1119899
120582WL1205821
1119899
minus
120582WL1205822
1119899
)
)
ℎ (119909)
= (
120588119895
119860119861(b)
120588119895
119860119861(b)
0119899times1
)
+(
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
0119899
120582121119899
120582WL1119899 0119899
)(
NWL
N1)
119867 =(
nablab120588119895
11986011986103
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
nablab120588119895
11986011986103 0
119899
120582121119899
03 03 120582WL1119899 0119899
)
(24)
where 120588119895119860119861
vector stacks together 119899DD geometric termsnablab isthe gradient operator with respect to the baseline vector and0119899is the 119899-by-119899 null matrix
422 Set 4119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879 = (
1119899
0119899
0119899
0119899
1198793119899)
ℎ (119909) = (120588119895
119860119861(b)
ℎ3119899 (119909))
119867 = (nablab120588119895
11986011986103 0119899
0119899
1198673119899)
(25)
where the subscript ldquo3119899rdquo is used to indicate matrix andfunctions relevant to set 3119899 It is worth noting that sincethe ionospheric delay is cancelled and not included in thestate vector the implemented observation model for 119875
1
measurement is
(1198751)119895119896
119860119861= 120588119895119896
119860119861+ 120578119895119896
1119860119861 (26)
Comparing (4) to (26) it is evident that set 4119899 implicitlyassumes the DD ionospheric delay modelled as an additionalGaussian white noise affecting the 119875
1measurements In other
words considering that the DD ionospheric delay is onlya small fraction of the total ionospheric delays the DD1198751observable noise is modelled as if the ionospheric delay
was not time correlated but included within the white noiseerror This approach resembles that one used in [7 14] whereionospheric delays are modelled as random walk processescharacterized by large process noises and correlation times inthe order of the filter time step
5 Results
The reference EKF and the no-iono solutions have beenrun on GRACE data Comparisons among the solutionsare performed looking at the baseline magnitude estimationerror and at the capability to obtain correct estimates of theinteger ambiguities Both of them are estimated thanks to thehigh accuracy reference solutions which can be computedprocessing GRACE data [8] As expected application to mildand moderate ionospheric conditions not shown herein for
International Journal of Aerospace Engineering 7
0 1 2 3 4 5 6 7 8
minus2
0
2
Reference solutionmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
Time (s)
Time (s)
CorrectWrongUnknownFixed
times104
times104
Num
ber o
f IA
b
m
Figure 1 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for the reference solution
brevity suggest that the filter with Learrsquos model is capable toachieve a baseline estimation error which is the half of theno-iono approach (both set 3119899 and set 4119899) This behaviourchanges under strong ionospheric activity In order to showthis DOY286 (October 13th) 2011 has been selected for theanalysis in which the two GRACE spacecrafts are separatedof more than 200 km and ionospheric activity is extremelyintense Figures 1ndash3 report the baselinemagnitude estimationerror and the IA estimation performance for the referencesolution and the no-iono solutions respectively Specificallyonly L1 estimation performance is shown because wide lanefail rates are significantly lower than those on L1
Figure 1 shows that under strong ionospheric activityLearrsquos model is not able to support the integer estimationso a significant number of ambiguities is wrong and baselinemagnitude estimation errors larger than 1moccur IA estima-tion performance increases notably when set 3119899 is considered(see Figure 2) and the baseline estimation error reduces todecimetre scale in this case Finally with reference to set4119899 it is evident that the addition of the 119875
1measurements
is not a successful strategy when the ionospheric activityis intense Indeed DD ionospheric delays dominate over1198751measurement noise and so they cannot be modelled as
additional Gaussian white noise
6 Concluding Remarks
This paper has compared various strategies for compensat-ing ionospheric delays in long baseline relative position-ing applications for LEO spacecraft using dual-frequencyCDGPS techniques Based on a relative positioning techniquepreviously developed by the authors problem settings thatdo not require ionospheric delays estimation have beeninvestigated The ionosphere-free alternatives have been also
Time (s)
Time (s)0 1 2 3 4 5 6 7 8
No-iono solution with ldquo3nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
times104
times104
minus2
0
2
Num
ber o
f IA
b
m
CorrectWrongUnknownFixed
Figure 2 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 3119899
Time (s)
No-iono solution with ldquo4nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 8minus3
minus2
minus1
0
1
2
3
0 1 2 3 4 5 6 7 80
2
4
6
8
10
Num
ber o
f IA
times104
Time (s) times104
b
m
CorrectWrongUnknownFixed
Figure 3 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 4119899
compared with a reference solution making use of a stan-dard ionospheric delay model for spaceborne applicationsoriginally developed by Lear Results suggest that among thepossible alternatives and under strong ionospheric activitybest performance is achieved using the observation model
8 International Journal of Aerospace Engineering
made of ionosphere-free combinations of carrier-phase mea-surements GRAPHIC combinations on the L1 frequencyand Melbourne-Wubbena combinations Future work willdeal with the extension of these results to a more completedata set including different levels of the ionospheric activityThe ultimate goal is the introduction of quantitative tools toguide the selection between model-based and ionosphere-free approaches depending on the ionospheric activity andthe available ionospheric models
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The activities of Urbano Tancredi in this work have beencarried out also with the contribution of Regione Campaniain the framework of the ArchAero project financed bythe Regional Law n52002 for the promotion of scientificresearch in Campania
References
[1] S Leung and O Montenbruck ldquoReal-time navigation of for-mation-flying spacecraft using global-positioning-systemmea-surementsrdquo Journal of Guidance Control andDynamics vol 28no 2 pp 226ndash235 2005
[2] O Montenbruck T Ebinuma E G Lightsey and S Leung ldquoAreal-time kinematic GPS sensor for spacecraft relative naviga-tionrdquo Aerospace Science and Technology vol 6 no 6 pp 435ndash449 2002
[3] M L Psiaki and S Mohiuddin ldquoModeling analysis and sim-ulation of GPS carrier phase for spacecraft relative navigationrdquoJournal of Guidance Control and Dynamics vol 30 no 6 pp1628ndash1639 2007
[4] F Zuiani and M Vasile ldquoPreliminary design of debris removalmissions by means of simplified models for low-thrust many-revolution transfersrdquo International Journal of Aerospace Engi-neering vol 2012 Article ID 836250 22 pages 2012
[5] P M Xavier A Vıctor and S Santiago ldquoEnhancing the devel-opment of a particular network of aerodromes using EGNOSrdquoin Proceedings of the 56th International Astronautical CongressInternational Astronautical Federation Fukouka Japan 2005
[6] D JWing andW B Cotton ldquoFor spacious skies self-separationwith lsquoautonomous flight rulesrsquo in US domestic airspacerdquo inProceedings of the 11th AIAA Aviation Technology Integrationand Operations (ATIO) Conference September 2011
[7] R Kroes O Montenbruck W Bertiger and P Visser ldquoPreciseGRACE baseline determination using GPSrdquo GPS Solutions vol9 no 1 pp 21ndash31 2005
[8] U Tancredi A Renga and M Grassi ldquoIonospheric path delaymodels for spaceborne GPS receivers flying in formation withlarge baselinesrdquo Advances in Space Research vol 48 no 3 pp507ndash520 2011
[9] Y Gu G Campa and M Innocenti ldquoFormation flight controlrdquoInternational Journal of Aerospace Engineering vol 2011 ArticleID 798981 2 pages 2011
[10] T Dautermann ldquoCivil air navigation using GNSS enhancedby wide area satellite based augmentation systemsrdquo Progress inAerospace Sciences vol 67 pp 51ndash62 2014
[11] Y Xu W Sun and P Li ldquoA miniature integrated navigationsystem for rotary-wing unmanned aerial vehiclesrdquo InternationalJournal of Aerospace Engineering vol 2014 Article ID 74894013 pages 2014
[12] M-S Huang R M Narayanan Y Zhang and A FeinbergldquoTracking of noncooperative airborne targets using ADS-Bsignal and radar sensingrdquo International Journal of AerospaceEngineering vol 2013 Article ID 521630 12 pages 2013
[13] L Forlenza G Fasano D Accardo and A Moccia ldquoFlightperformance analysis of an image processing algorithm forintegrated sense-and-avoid systemsrdquo International Journal ofAerospace Engineering vol 2012 Article ID 542165 8 pages2012
[14] R Kroes Precise relative positioning of formation flying space-craft using GPS [PhD thesis] Delft University of TechnologyDelft The Netherlands 2006
[15] S-C Wu and Y E Bar-Sever ldquoReal-time sub-cm differentialorbit determination of two low-earth orbiters with GPS biasfixingrdquo inProceedings of the 19th International TechnicalMeetingof the Satellite Division of the Institution of Navigation (IONGNSS rsquo06) pp 2515ndash2522 Fort Worth Tex USA 2006
[16] S T Goh O Abdelkhalik and S A Zekavat ldquoImplementationof a differential geometric filter for spacecraft formation orbitestimationrdquo International Journal of Aerospace Engineering vol2012 Article ID 910496 13 pages 2012
[17] U Tancredi A Renga and M Grassi ldquoReal-time relative posi-tioning of spacecraft over long baselinesrdquo Journal of GuidanceControl and Dynamics vol 37 no 1 pp 47ndash58 2014
[18] T Richert and N El-Sheimy ldquoIonospheric modelingThe key toGNSS ambiguity resolutionrdquo GPS World pp 35ndash40 2005
[19] O Montenbruck M Wermuth and R Kahle ldquoGPS basedrelative navigation for the TanDEM-X missionmdashfirst flightresultsrdquo Navigation Journal of the Institute of Navigation vol58 no 4 pp 293ndash304 2011-2012
[20] B Li S Verhagen and P J G Teunissen ldquoRobustness of GNSSinteger ambiguity resolution in the presence of atmosphericbiasesrdquo GPS Solutions vol 18 no 2 pp 283ndash296 2014
[21] J Farrel andM BarthTheGlobal Positioning Systemand InertialNavigation chapter 5 McGraw-Hill New York NY USA 1999
[22] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications B W Parkinson and J J Spilker Edsvol 2 pp 559ndash592 American Institute of Aeronautics andAstronautics Washington DC USA 1996
[23] W G Melbourne ldquoThe case for ranging in GPS-based geodeticsystemsrdquo in Proceedings of the 1st Intenational Symposium onPrecise Positioning with the Global Positioning System pp 373ndash386 Ockville Md USA 1985
[24] G Wubbena ldquoSoftware developments for geodetic positioningwith GPS using TI 4100 code and carrier measurementsrdquoin Proceedings of the 1st Intenational Symposium on Precisepositioning with the Global Positioning System pp 403ndash412Rockville Md USA 1985
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 3
(iv) 119868119895119896119860119861= 119868119896
119861minus 119868119896
119860minus 119868119895
119861+ 119868119895
119860is the DD ionospheric delay
on the L1 frequency which is denoted simply by ion-ospheric delay in the following
(v) (1198731)119895119896
119860119861= (1198731)
119896
119861minus (1198731)
119896
119860minus (1198731)
119895
119861+ (1198731)
119895
119860is the
integer ambiguity on the L1 frequency (on L2 whichis analogous)
(vi) 1205781119895119896
119860119861= 1205781119896
119861minus 1205781119896
119860minus 1205781119895
119861+ 1205781119895
119860is the 119875
1noise term on
the L1 frequency (on L2 which is analogous)(vii) 1205731
119895119896
119860119861= 1205731119896
119861minus 1205731119896
119860minus 1205731119895
119861+ 1205731119895
119860is the 119871
1noise term on
the L1 frequency (on L2 which is analogous)Each of the four observables in (4) is assumed to be indepen-dent from the other ones However the 119899 DDmeasurementsof the same kind at a certain time epoch are mutuallycorrelated due to the presence of the pivot satellite in allthe measurements More precisely denoting generically by119883the observation type that is 119883 = 119875
1 119871
2 and by 120590
119883its
standard deviation we have
cov[
[
[
[
(119883)01119860119861
sdot sdot sdot
(119883)0119899119860119861
]
]
]
]
= 1205902119883119863 119863 =(
4 2 sdot sdot sdot 22 4 2 d
2 sdot sdot sdot sdot sdot sdot 4
) (5)
32 Ionospheric Free Combination The most common com-bination for eliminating the ionospheric delay referred toas Ionosphere-Free (IF) [21] is concerned with combiningobservations of the same type on the two carrier frequenciesexploiting the frequency dependence of the first-order iono-spheric delay effect More precisely the IF combinations areobtained as
119883IF =119891221198832 minus 119891
211198831
11989122 minus 119891
21
=
12057421198832 minus 11988311205742minus 1
(6)
Thus two IF observables per each DD couple 119895119896 out of thefour measurements in (4) are
(119875IF)119895119896
119860119861=
11 minus 1205742
[(1198751)119895119896
119860119861minus 120574
2(1198752)119895119896
119860119861] (7)
(119871 IF)119895119896
119860119861=
11 minus 1205742
[(1198711)119895119896
119860119861minus 120574
2(1198712)119895119896
119860119861] (8)
The IF observationmodel can be obtained combining (4) (6)and (7) which yields
(119875IF)119895119896
119860119861= 120588119895119896
119860119861+ (120578IF)
119895119896
119860119861
(119871 IF)119895119896
119860119861= 120588119895119896
119860119861+
11 minus 1205742
[1205821 (1198731)119895119896
119860119861minus 120574
21205822 (1198732)
119895119896
119860119861]
+ (120573IF)119895119896
119860119861
(9)
Since the observation types are assumed to be independentassuming white Gaussian measurements noises the IF com-binations are affected by Gaussian white noise with variance
Var [(119883IF)119895119896
119860119861] = 4
12059021198831 + 120574
412059021198832
(1 minus 1205742)2 119883 = 119875 119871 (10)
Hence the noise is increased compared to the originaluncombined observations
33 GRAPHIC Combinations GRAPHIC combinationsexploit the asymmetry of the ionospheric effect on groupand phase propagation [22] In practice they combinepseudorange and carrier-phase measurements on eachfrequency as follows
(1198661)119895119896
119860119861= 05 [(1198751)
119895119896
119860119861+ (1198711)
119895119896
119860119861]
(1198662)119895119896
119860119861= 05 [(1198752)
119895119896
119860119861+ (1198712)
119895119896
119860119861]
(11)
From the above equations the GRAPHIC observationmodeland variance read
(1198661)119895119896
119860119861= 120588119895119896
119860119861+
12058212(1198731)119895119896
119860119861+ (1206011)
119895119896
119860119861
(1198662)119895119896
119860119861= 120588119895119896
119860119861+
12058222(1198732)119895119896
119860119861+ (1206012)
119895119896
119860119861
Var [(119866119894)119895119896
119860119861] = 120590
2119875119894+120590
2119871119894 119894 = 1 2
(12)
where 1206011 1206012 indicate the noise terms of 1198661and 119866
2combina-
tions respectively
34 Melbourne-Wubbena Combinations Melbourne-Wub-bena (MW) combinations combine all four observable typesfor cancelling out the ionospheric delay [23 24] They buildupon the definition of the wide and narrow lane (NL)wavelengths
120582WL =119888
1198911 minus 1198912
120582NL =119888
1198911 + 1198912
(13)
where 119888 is the speed of light in vacuum The MW combina-tions are obtained as
(MW1015840)119895119896
119860119861
= 120582WL [(1198711)119895119896
119860119861
1205821minus
(1198712)119895119896
119860119861
1205822]
minus120582NL [(1198751)119895119896
119860119861
1205821+
(1198752)119895119896
119860119861
1205822]
(14)
and have the following observation model and variance
(MW)119895119896119860119861= 120582WL [(119873WL)
119895119896
119860119861] +120596119895119896
119860119861
(119873WL)119895119896
119860119861= (1198731)
119895119896
119860119861minus (1198732)
119895119896
119860119861
Var [(MW)119895119896119860119861] = 41205822NL(
12059021198751
12058221+
12059021198752
12058222)
+ 41205822WL(12059021198711
12058221+
12059021198712
12058222)
(15)
where 120596 represents the noise term of the combination
4 International Journal of Aerospace Engineering
Table 1 Expected and estimated standard deviations of the various combinations for 120588119895119896 estimation (NA not available)
1198751
1198752
1198711 1198712
119871 IF 1198661
1198662
119875IF MW
Formula 12059021198751
12059021198752
12059021198711= 120590
21198712
2radic12059021198711+ 120574
412059021198712
(1 minus 1205742)2radic120590
21198751+ 120590
21198711
radic12059021198752+ 120590
21198712
2radic12059021198751+ 120574
412059021198752
(1 minus 1205742)2NA
Unit m M m m m m m mExample 1 0150 0200 0010 0060 0150 0200 0983 NAExample 2 0100 0150 0005 0030 0100 0150 0689 NAExample 3 0100 0150 0001 0006 0100 0150 0689 NAGRACE data 0005 0082 0149 0708 NA(Jan 09)
Table 2 Expected and estimated standard deviations of the various combinations for1198731
119895119896 estimation (NA not available)
1198751 1198752 1198711 1198712 119871 IF 1198661 1198662 119875IF MW
Formula 12059021198751
12059021198752
12059021198711= 120590
21198712
2radic12059021198711+ 120574
412059021198712
1205821 (1 minus 1205742)radic
21205821(120590
21198751+ 120590
21198711) NA 2radic
1205822NL
120582WL(
12059021198751
12058221+
12059021198752
12058222) + 120582WL (
12059021198711
12058221+
12059021198712
12058222)
Unit m m m Cycles Cycles Cycles CyclesExample 1 0150 0200 0010 0123 1580 NA 0312Example 2 0100 0150 0005 0061 1052 NA 0211Example 3 0100 0150 0001 0012 1051 NA 0201GRACE data 0010 0862 NA 0194(Jan 09)
4 Ionosphere-Free Relative Positioning
This section is concerned with establishing which of themeasurement combinations presented in Section 3 is suitablefor computing the relative position of the two receivers inlong baseline applications The measurement combinationsavailable with no ionospheric effects are the 119899 119875IF combina-tions the 119899 119871 IF combinations the 119899GRAPHIC combinationson L1 and L2 and the 119899 MW combinations for a totalof 5n measurements However the 5119899 measurements arenot linearly independent In particular each group of 5observables per each of the 119899 DD couples can be seen as alinear transformation of the 4 uncombined measurementsof (4) More precisely the cancellation of the ionospherefrom (4) can be seen as a linear projection of the 4-dimensional measurement vector [119875
1 1198752 1198711 1198712]119879 onto a 3-
dimensional hyperplane This implies that no more thanthree linear combinations of the four dimensional vectorexist being linearly independent and thus suitable for use asmeasurement vector in an EKF In addition whatever set ofthree linearly independent vectors lying on the hyperplanecan be used as a basis for describing all the vectors belongingto the hyperplane Even though any of such bases would yieldtheoretically equivalent positioning solutions significant dif-ferences exist in practical applications due to unmodeledsystematic errors In order to find such ldquobestrdquo basis its
performance in accurately estimating both the geometricterm and the cycle ambiguity is analyzed A natural indicatorto evaluate the accuracy achieved by a specific measurementcombination is the standard deviation (STD) of the noiseaffecting the measurements
Hence a specific analysis has been performed Startingfrom different candidate noise levels for the uncombinedmeasurements that is 119875
1 1198752 1198711 and 119871
2(see the first
three columns in Table 1) reflecting typical performanceof spaceborne GPS receivers the expected STD for theestimation of the geometric term 120588
119895119896 is derived as listedin Table 1 The rationale of this analysis is that differentcombinations of GPS measurements may modify that iseither amply or reduce the uncertainty of the geometricterm Combinations able to reduce this uncertainty should bepreferred for implementation in an ionosphere-free EKFThesame analysis is then repeated for the integer ambiguity onL1 Again the smaller the uncertainty on this ambiguity thelarger the probability to correctly fix it The results are showninTable 2 In this case a scale factor is introduced to representthe STD of combinedmeasurements as a fraction of L1 cyclesIn addition to this theoretical analysis the dispersion ofactual GRACE data is computed and the relevant STD iscalculated (see the last row in Tables 1 and 2) for gainingfurther insight into the true-world accuracy of the variouscombinations
International Journal of Aerospace Engineering 5
According to the results presented in Tables 1 and 2 theset of measurements including 119871 IF 1198661 and MW combina-tions is the one allowing a higher potential accuracy on boththe DD geometric term and the cycle ambiguities This set ofmeasurements is called set ldquo3119899rdquo in what follows A potentiallimitation of set 3119899 is that cycle ambiguities are present inall the three observation models Hence when the numberof fixed ambiguities is smaller than three the observationmodel provides no useful information to the EKF which isthus forced to rely only on its propagation model In thisparticular situation the EKF is expected to perform poorlyTo cope with this problem an additional set is consideredcalled set ldquo4119899rdquo and made of 119871 IF 1198661 and MW combinationsplus the uncombined 119875
1measurement The addition of 119875
1
observations allows the filter to rely on relative positioninginformation even when less than three cycle ambiguities arefixed
Because the various combinations have different observa-tion models selecting different sets of measurements affectsthe observability of the EKF state vector differently Theobservability of the system at hand is extremely involvedto be analyzed Indeed the dynamical system is nonlinearand evolves on a time-varying trajectory Its linearization isthus time-varying and depends on the state estimate Theobservation model is nonlinear due to the DD geometryterms Its linearization depends on the state trajectory andthus it is time-varying as well Both the dynamical andthe observation models depend on an exogenous vectorparameter (eg the absolute position of one of the receivers)[17] Finally both the EKF state vector and the measurementsdepend on the number of DD couples 119899 which is time-varying as well In such a condition instead of developinga complicated observability analysis a different approach ispursued which is based on numerically evaluating the EKFperformances using both set 3119899 and set 4119899 as shown in thenext section
41 No-Iono EKF Dynamic Model The no-iono EKF statevector is defined as
119909 isin R6+2119899
119909 = (b b NWL N1)119879
(16)
Concerning the process model the baseline dynamics isdescribed by the nonlinear relative Keplerian model with J2effects included This model is equal to the one used in the
VTEC-based EKF [17] and is denoted at the time epoch 119905119896as
follows
b = 119891 (b b r119860)
(
bb)
119896+1
= Φ119887119896(
bb)
119896
+w119887
119864 (w119887w119879119887) = 119876
119887
(17)
where 119891 is the nonlinear baseline propagation function r119860
denotes the receiver 119860 position vector in ECEF Φ is thetime-discrete baseline propagation matrix w
119887is the baseline
process noise vector and E indicates themathematical expec-tation
Cycle ambiguities are instead assumed to be constantHowever a small process noise w
119873might be injected letting
them be modeled as a random constant plus random walkThe model is equal to the one used in the VTEC-basedEKF [17] and is denoted by (1
119899is the 119899-by-119899 identity
matrix)
(
NWL
N1) = 0
(
NWL
N1)
119896+1= 1119899(
NWL
N1)
119896
+w119873
119864 (w119873w119879119873) = 119876
119873= 120590
21198731119899
(18)
42 No-Iono EKF Observation Model The two differentobservation models share some common structure whichis discussed first Then details on each of the two modelswill be given The no-iono EKF measurement vector 119910 ismade of a series of measurement combinations depend-ing on the chosen set Each measurement combinationstacks together the combinations for each of the 119899 DDcouples
X isin R119899
X = ((119883)01119860119861
sdot sdot sdot (119883)0119899119860119861)
119879
(19)
The covariance matrix of 119910 has a nonsparse structure dueto the presence of the various uncombined measurementsin more combinations and because of the full covariancematrix of each of the uncombined measurements X In orderto have the desired covariance matrix cov(119910) it is possibleto introduce the vector 119911 that stacks the uncombined DDobservations 119875
1 119871
2
119911 = ( (1198751)01119860119861
sdot sdot sdot (1198751)0119899119860119861
(1198752)01119860119861
sdot sdot sdot (1198752)0119899119860119861
(1198711)01119860119861
sdot sdot sdot (1198711)0119899119860119861
(1198712)01119860119861
sdot sdot sdot (1198712)0119899119860119861)
119879
cov (119911) =(
12059021198751119863 0
12059021198752119863
1205902119871119863
0 1205902119871119863
)
(20)
6 International Journal of Aerospace Engineering
The chosen combined measurements set can be expressed asa linear function of the uncombined measurement vector 119911by means of a matrix 119879 depending on the chosen set Thematrix cov(119910) can be obtained by cov(119911) applying the lineartransformation
119910 = 119879119911
119877 = cov (119910) = 119879 cov (119911) 119879119879(21)
The observation model relating the EKF state to the observ-ables is nonlinear due to the geometric term The geometricterm is independent from the chosen measurement set andthus is discussed herein The 119899 DD geometric terms arerelated to the baseline by the following equations (119877119894 denotesthe 119894th GPS satellite position vector in ECEF)
120588119895119896
119860119861=
10038171003817100381710038171003817R119896 minus (r
119860+ b)1003817100381710038171003817
1003817minus
10038171003817100381710038171003817R119896 minus r
119860
10038171003817100381710038171003817minus
10038171003817100381710038171003817R119895 minus (r
119860+ b)1003817100381710038171003817
1003817
+
10038171003817100381710038171003817R119895 minus r
119860
10038171003817100381710038171003817
(22)
The nonlinear observation model and the linear delta obser-vationmodel needed for the computation of theKalman gainin the EKF are obtained by linearization of the propagatedstate vector and it can be expressed generically as
119910 isin R3119899 119910 = ℎ (119909)
Δ119910 isin R3119899 Δ119910 = 119867Δ119909
(23)
Thus at each time epoch from the observation equationsthe measurement vector 119910 is computed combining uncom-bined measurements The choice of the measurement set toconsider thus changes only the following (1) 119879 matrix forobtaining the EKF combinedmeasurement vector 119910 from theuncombined one 119911 (2) ℎ(119909) nonlinear observation functionand (3) 119867matrix of the linearized observation model Theseitems are discussed in the following subsections for eachmeasurement set
421 Set 3119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879
=(
(
0119899
0119899
11 minus 1205742
1119899minus
1205742
1 minus 12057421119899
121119899
0119899
121119899
0119899
minus
120582NL1205821
1119899minus
120582NL1205822
1119899
120582WL1205821
1119899
minus
120582WL1205822
1119899
)
)
ℎ (119909)
= (
120588119895
119860119861(b)
120588119895
119860119861(b)
0119899times1
)
+(
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
0119899
120582121119899
120582WL1119899 0119899
)(
NWL
N1)
119867 =(
nablab120588119895
11986011986103
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
nablab120588119895
11986011986103 0
119899
120582121119899
03 03 120582WL1119899 0119899
)
(24)
where 120588119895119860119861
vector stacks together 119899DD geometric termsnablab isthe gradient operator with respect to the baseline vector and0119899is the 119899-by-119899 null matrix
422 Set 4119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879 = (
1119899
0119899
0119899
0119899
1198793119899)
ℎ (119909) = (120588119895
119860119861(b)
ℎ3119899 (119909))
119867 = (nablab120588119895
11986011986103 0119899
0119899
1198673119899)
(25)
where the subscript ldquo3119899rdquo is used to indicate matrix andfunctions relevant to set 3119899 It is worth noting that sincethe ionospheric delay is cancelled and not included in thestate vector the implemented observation model for 119875
1
measurement is
(1198751)119895119896
119860119861= 120588119895119896
119860119861+ 120578119895119896
1119860119861 (26)
Comparing (4) to (26) it is evident that set 4119899 implicitlyassumes the DD ionospheric delay modelled as an additionalGaussian white noise affecting the 119875
1measurements In other
words considering that the DD ionospheric delay is onlya small fraction of the total ionospheric delays the DD1198751observable noise is modelled as if the ionospheric delay
was not time correlated but included within the white noiseerror This approach resembles that one used in [7 14] whereionospheric delays are modelled as random walk processescharacterized by large process noises and correlation times inthe order of the filter time step
5 Results
The reference EKF and the no-iono solutions have beenrun on GRACE data Comparisons among the solutionsare performed looking at the baseline magnitude estimationerror and at the capability to obtain correct estimates of theinteger ambiguities Both of them are estimated thanks to thehigh accuracy reference solutions which can be computedprocessing GRACE data [8] As expected application to mildand moderate ionospheric conditions not shown herein for
International Journal of Aerospace Engineering 7
0 1 2 3 4 5 6 7 8
minus2
0
2
Reference solutionmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
Time (s)
Time (s)
CorrectWrongUnknownFixed
times104
times104
Num
ber o
f IA
b
m
Figure 1 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for the reference solution
brevity suggest that the filter with Learrsquos model is capable toachieve a baseline estimation error which is the half of theno-iono approach (both set 3119899 and set 4119899) This behaviourchanges under strong ionospheric activity In order to showthis DOY286 (October 13th) 2011 has been selected for theanalysis in which the two GRACE spacecrafts are separatedof more than 200 km and ionospheric activity is extremelyintense Figures 1ndash3 report the baselinemagnitude estimationerror and the IA estimation performance for the referencesolution and the no-iono solutions respectively Specificallyonly L1 estimation performance is shown because wide lanefail rates are significantly lower than those on L1
Figure 1 shows that under strong ionospheric activityLearrsquos model is not able to support the integer estimationso a significant number of ambiguities is wrong and baselinemagnitude estimation errors larger than 1moccur IA estima-tion performance increases notably when set 3119899 is considered(see Figure 2) and the baseline estimation error reduces todecimetre scale in this case Finally with reference to set4119899 it is evident that the addition of the 119875
1measurements
is not a successful strategy when the ionospheric activityis intense Indeed DD ionospheric delays dominate over1198751measurement noise and so they cannot be modelled as
additional Gaussian white noise
6 Concluding Remarks
This paper has compared various strategies for compensat-ing ionospheric delays in long baseline relative position-ing applications for LEO spacecraft using dual-frequencyCDGPS techniques Based on a relative positioning techniquepreviously developed by the authors problem settings thatdo not require ionospheric delays estimation have beeninvestigated The ionosphere-free alternatives have been also
Time (s)
Time (s)0 1 2 3 4 5 6 7 8
No-iono solution with ldquo3nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
times104
times104
minus2
0
2
Num
ber o
f IA
b
m
CorrectWrongUnknownFixed
Figure 2 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 3119899
Time (s)
No-iono solution with ldquo4nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 8minus3
minus2
minus1
0
1
2
3
0 1 2 3 4 5 6 7 80
2
4
6
8
10
Num
ber o
f IA
times104
Time (s) times104
b
m
CorrectWrongUnknownFixed
Figure 3 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 4119899
compared with a reference solution making use of a stan-dard ionospheric delay model for spaceborne applicationsoriginally developed by Lear Results suggest that among thepossible alternatives and under strong ionospheric activitybest performance is achieved using the observation model
8 International Journal of Aerospace Engineering
made of ionosphere-free combinations of carrier-phase mea-surements GRAPHIC combinations on the L1 frequencyand Melbourne-Wubbena combinations Future work willdeal with the extension of these results to a more completedata set including different levels of the ionospheric activityThe ultimate goal is the introduction of quantitative tools toguide the selection between model-based and ionosphere-free approaches depending on the ionospheric activity andthe available ionospheric models
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The activities of Urbano Tancredi in this work have beencarried out also with the contribution of Regione Campaniain the framework of the ArchAero project financed bythe Regional Law n52002 for the promotion of scientificresearch in Campania
References
[1] S Leung and O Montenbruck ldquoReal-time navigation of for-mation-flying spacecraft using global-positioning-systemmea-surementsrdquo Journal of Guidance Control andDynamics vol 28no 2 pp 226ndash235 2005
[2] O Montenbruck T Ebinuma E G Lightsey and S Leung ldquoAreal-time kinematic GPS sensor for spacecraft relative naviga-tionrdquo Aerospace Science and Technology vol 6 no 6 pp 435ndash449 2002
[3] M L Psiaki and S Mohiuddin ldquoModeling analysis and sim-ulation of GPS carrier phase for spacecraft relative navigationrdquoJournal of Guidance Control and Dynamics vol 30 no 6 pp1628ndash1639 2007
[4] F Zuiani and M Vasile ldquoPreliminary design of debris removalmissions by means of simplified models for low-thrust many-revolution transfersrdquo International Journal of Aerospace Engi-neering vol 2012 Article ID 836250 22 pages 2012
[5] P M Xavier A Vıctor and S Santiago ldquoEnhancing the devel-opment of a particular network of aerodromes using EGNOSrdquoin Proceedings of the 56th International Astronautical CongressInternational Astronautical Federation Fukouka Japan 2005
[6] D JWing andW B Cotton ldquoFor spacious skies self-separationwith lsquoautonomous flight rulesrsquo in US domestic airspacerdquo inProceedings of the 11th AIAA Aviation Technology Integrationand Operations (ATIO) Conference September 2011
[7] R Kroes O Montenbruck W Bertiger and P Visser ldquoPreciseGRACE baseline determination using GPSrdquo GPS Solutions vol9 no 1 pp 21ndash31 2005
[8] U Tancredi A Renga and M Grassi ldquoIonospheric path delaymodels for spaceborne GPS receivers flying in formation withlarge baselinesrdquo Advances in Space Research vol 48 no 3 pp507ndash520 2011
[9] Y Gu G Campa and M Innocenti ldquoFormation flight controlrdquoInternational Journal of Aerospace Engineering vol 2011 ArticleID 798981 2 pages 2011
[10] T Dautermann ldquoCivil air navigation using GNSS enhancedby wide area satellite based augmentation systemsrdquo Progress inAerospace Sciences vol 67 pp 51ndash62 2014
[11] Y Xu W Sun and P Li ldquoA miniature integrated navigationsystem for rotary-wing unmanned aerial vehiclesrdquo InternationalJournal of Aerospace Engineering vol 2014 Article ID 74894013 pages 2014
[12] M-S Huang R M Narayanan Y Zhang and A FeinbergldquoTracking of noncooperative airborne targets using ADS-Bsignal and radar sensingrdquo International Journal of AerospaceEngineering vol 2013 Article ID 521630 12 pages 2013
[13] L Forlenza G Fasano D Accardo and A Moccia ldquoFlightperformance analysis of an image processing algorithm forintegrated sense-and-avoid systemsrdquo International Journal ofAerospace Engineering vol 2012 Article ID 542165 8 pages2012
[14] R Kroes Precise relative positioning of formation flying space-craft using GPS [PhD thesis] Delft University of TechnologyDelft The Netherlands 2006
[15] S-C Wu and Y E Bar-Sever ldquoReal-time sub-cm differentialorbit determination of two low-earth orbiters with GPS biasfixingrdquo inProceedings of the 19th International TechnicalMeetingof the Satellite Division of the Institution of Navigation (IONGNSS rsquo06) pp 2515ndash2522 Fort Worth Tex USA 2006
[16] S T Goh O Abdelkhalik and S A Zekavat ldquoImplementationof a differential geometric filter for spacecraft formation orbitestimationrdquo International Journal of Aerospace Engineering vol2012 Article ID 910496 13 pages 2012
[17] U Tancredi A Renga and M Grassi ldquoReal-time relative posi-tioning of spacecraft over long baselinesrdquo Journal of GuidanceControl and Dynamics vol 37 no 1 pp 47ndash58 2014
[18] T Richert and N El-Sheimy ldquoIonospheric modelingThe key toGNSS ambiguity resolutionrdquo GPS World pp 35ndash40 2005
[19] O Montenbruck M Wermuth and R Kahle ldquoGPS basedrelative navigation for the TanDEM-X missionmdashfirst flightresultsrdquo Navigation Journal of the Institute of Navigation vol58 no 4 pp 293ndash304 2011-2012
[20] B Li S Verhagen and P J G Teunissen ldquoRobustness of GNSSinteger ambiguity resolution in the presence of atmosphericbiasesrdquo GPS Solutions vol 18 no 2 pp 283ndash296 2014
[21] J Farrel andM BarthTheGlobal Positioning Systemand InertialNavigation chapter 5 McGraw-Hill New York NY USA 1999
[22] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications B W Parkinson and J J Spilker Edsvol 2 pp 559ndash592 American Institute of Aeronautics andAstronautics Washington DC USA 1996
[23] W G Melbourne ldquoThe case for ranging in GPS-based geodeticsystemsrdquo in Proceedings of the 1st Intenational Symposium onPrecise Positioning with the Global Positioning System pp 373ndash386 Ockville Md USA 1985
[24] G Wubbena ldquoSoftware developments for geodetic positioningwith GPS using TI 4100 code and carrier measurementsrdquoin Proceedings of the 1st Intenational Symposium on Precisepositioning with the Global Positioning System pp 403ndash412Rockville Md USA 1985
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Aerospace Engineering
Table 1 Expected and estimated standard deviations of the various combinations for 120588119895119896 estimation (NA not available)
1198751
1198752
1198711 1198712
119871 IF 1198661
1198662
119875IF MW
Formula 12059021198751
12059021198752
12059021198711= 120590
21198712
2radic12059021198711+ 120574
412059021198712
(1 minus 1205742)2radic120590
21198751+ 120590
21198711
radic12059021198752+ 120590
21198712
2radic12059021198751+ 120574
412059021198752
(1 minus 1205742)2NA
Unit m M m m m m m mExample 1 0150 0200 0010 0060 0150 0200 0983 NAExample 2 0100 0150 0005 0030 0100 0150 0689 NAExample 3 0100 0150 0001 0006 0100 0150 0689 NAGRACE data 0005 0082 0149 0708 NA(Jan 09)
Table 2 Expected and estimated standard deviations of the various combinations for1198731
119895119896 estimation (NA not available)
1198751 1198752 1198711 1198712 119871 IF 1198661 1198662 119875IF MW
Formula 12059021198751
12059021198752
12059021198711= 120590
21198712
2radic12059021198711+ 120574
412059021198712
1205821 (1 minus 1205742)radic
21205821(120590
21198751+ 120590
21198711) NA 2radic
1205822NL
120582WL(
12059021198751
12058221+
12059021198752
12058222) + 120582WL (
12059021198711
12058221+
12059021198712
12058222)
Unit m m m Cycles Cycles Cycles CyclesExample 1 0150 0200 0010 0123 1580 NA 0312Example 2 0100 0150 0005 0061 1052 NA 0211Example 3 0100 0150 0001 0012 1051 NA 0201GRACE data 0010 0862 NA 0194(Jan 09)
4 Ionosphere-Free Relative Positioning
This section is concerned with establishing which of themeasurement combinations presented in Section 3 is suitablefor computing the relative position of the two receivers inlong baseline applications The measurement combinationsavailable with no ionospheric effects are the 119899 119875IF combina-tions the 119899 119871 IF combinations the 119899GRAPHIC combinationson L1 and L2 and the 119899 MW combinations for a totalof 5n measurements However the 5119899 measurements arenot linearly independent In particular each group of 5observables per each of the 119899 DD couples can be seen as alinear transformation of the 4 uncombined measurementsof (4) More precisely the cancellation of the ionospherefrom (4) can be seen as a linear projection of the 4-dimensional measurement vector [119875
1 1198752 1198711 1198712]119879 onto a 3-
dimensional hyperplane This implies that no more thanthree linear combinations of the four dimensional vectorexist being linearly independent and thus suitable for use asmeasurement vector in an EKF In addition whatever set ofthree linearly independent vectors lying on the hyperplanecan be used as a basis for describing all the vectors belongingto the hyperplane Even though any of such bases would yieldtheoretically equivalent positioning solutions significant dif-ferences exist in practical applications due to unmodeledsystematic errors In order to find such ldquobestrdquo basis its
performance in accurately estimating both the geometricterm and the cycle ambiguity is analyzed A natural indicatorto evaluate the accuracy achieved by a specific measurementcombination is the standard deviation (STD) of the noiseaffecting the measurements
Hence a specific analysis has been performed Startingfrom different candidate noise levels for the uncombinedmeasurements that is 119875
1 1198752 1198711 and 119871
2(see the first
three columns in Table 1) reflecting typical performanceof spaceborne GPS receivers the expected STD for theestimation of the geometric term 120588
119895119896 is derived as listedin Table 1 The rationale of this analysis is that differentcombinations of GPS measurements may modify that iseither amply or reduce the uncertainty of the geometricterm Combinations able to reduce this uncertainty should bepreferred for implementation in an ionosphere-free EKFThesame analysis is then repeated for the integer ambiguity onL1 Again the smaller the uncertainty on this ambiguity thelarger the probability to correctly fix it The results are showninTable 2 In this case a scale factor is introduced to representthe STD of combinedmeasurements as a fraction of L1 cyclesIn addition to this theoretical analysis the dispersion ofactual GRACE data is computed and the relevant STD iscalculated (see the last row in Tables 1 and 2) for gainingfurther insight into the true-world accuracy of the variouscombinations
International Journal of Aerospace Engineering 5
According to the results presented in Tables 1 and 2 theset of measurements including 119871 IF 1198661 and MW combina-tions is the one allowing a higher potential accuracy on boththe DD geometric term and the cycle ambiguities This set ofmeasurements is called set ldquo3119899rdquo in what follows A potentiallimitation of set 3119899 is that cycle ambiguities are present inall the three observation models Hence when the numberof fixed ambiguities is smaller than three the observationmodel provides no useful information to the EKF which isthus forced to rely only on its propagation model In thisparticular situation the EKF is expected to perform poorlyTo cope with this problem an additional set is consideredcalled set ldquo4119899rdquo and made of 119871 IF 1198661 and MW combinationsplus the uncombined 119875
1measurement The addition of 119875
1
observations allows the filter to rely on relative positioninginformation even when less than three cycle ambiguities arefixed
Because the various combinations have different observa-tion models selecting different sets of measurements affectsthe observability of the EKF state vector differently Theobservability of the system at hand is extremely involvedto be analyzed Indeed the dynamical system is nonlinearand evolves on a time-varying trajectory Its linearization isthus time-varying and depends on the state estimate Theobservation model is nonlinear due to the DD geometryterms Its linearization depends on the state trajectory andthus it is time-varying as well Both the dynamical andthe observation models depend on an exogenous vectorparameter (eg the absolute position of one of the receivers)[17] Finally both the EKF state vector and the measurementsdepend on the number of DD couples 119899 which is time-varying as well In such a condition instead of developinga complicated observability analysis a different approach ispursued which is based on numerically evaluating the EKFperformances using both set 3119899 and set 4119899 as shown in thenext section
41 No-Iono EKF Dynamic Model The no-iono EKF statevector is defined as
119909 isin R6+2119899
119909 = (b b NWL N1)119879
(16)
Concerning the process model the baseline dynamics isdescribed by the nonlinear relative Keplerian model with J2effects included This model is equal to the one used in the
VTEC-based EKF [17] and is denoted at the time epoch 119905119896as
follows
b = 119891 (b b r119860)
(
bb)
119896+1
= Φ119887119896(
bb)
119896
+w119887
119864 (w119887w119879119887) = 119876
119887
(17)
where 119891 is the nonlinear baseline propagation function r119860
denotes the receiver 119860 position vector in ECEF Φ is thetime-discrete baseline propagation matrix w
119887is the baseline
process noise vector and E indicates themathematical expec-tation
Cycle ambiguities are instead assumed to be constantHowever a small process noise w
119873might be injected letting
them be modeled as a random constant plus random walkThe model is equal to the one used in the VTEC-basedEKF [17] and is denoted by (1
119899is the 119899-by-119899 identity
matrix)
(
NWL
N1) = 0
(
NWL
N1)
119896+1= 1119899(
NWL
N1)
119896
+w119873
119864 (w119873w119879119873) = 119876
119873= 120590
21198731119899
(18)
42 No-Iono EKF Observation Model The two differentobservation models share some common structure whichis discussed first Then details on each of the two modelswill be given The no-iono EKF measurement vector 119910 ismade of a series of measurement combinations depend-ing on the chosen set Each measurement combinationstacks together the combinations for each of the 119899 DDcouples
X isin R119899
X = ((119883)01119860119861
sdot sdot sdot (119883)0119899119860119861)
119879
(19)
The covariance matrix of 119910 has a nonsparse structure dueto the presence of the various uncombined measurementsin more combinations and because of the full covariancematrix of each of the uncombined measurements X In orderto have the desired covariance matrix cov(119910) it is possibleto introduce the vector 119911 that stacks the uncombined DDobservations 119875
1 119871
2
119911 = ( (1198751)01119860119861
sdot sdot sdot (1198751)0119899119860119861
(1198752)01119860119861
sdot sdot sdot (1198752)0119899119860119861
(1198711)01119860119861
sdot sdot sdot (1198711)0119899119860119861
(1198712)01119860119861
sdot sdot sdot (1198712)0119899119860119861)
119879
cov (119911) =(
12059021198751119863 0
12059021198752119863
1205902119871119863
0 1205902119871119863
)
(20)
6 International Journal of Aerospace Engineering
The chosen combined measurements set can be expressed asa linear function of the uncombined measurement vector 119911by means of a matrix 119879 depending on the chosen set Thematrix cov(119910) can be obtained by cov(119911) applying the lineartransformation
119910 = 119879119911
119877 = cov (119910) = 119879 cov (119911) 119879119879(21)
The observation model relating the EKF state to the observ-ables is nonlinear due to the geometric term The geometricterm is independent from the chosen measurement set andthus is discussed herein The 119899 DD geometric terms arerelated to the baseline by the following equations (119877119894 denotesthe 119894th GPS satellite position vector in ECEF)
120588119895119896
119860119861=
10038171003817100381710038171003817R119896 minus (r
119860+ b)1003817100381710038171003817
1003817minus
10038171003817100381710038171003817R119896 minus r
119860
10038171003817100381710038171003817minus
10038171003817100381710038171003817R119895 minus (r
119860+ b)1003817100381710038171003817
1003817
+
10038171003817100381710038171003817R119895 minus r
119860
10038171003817100381710038171003817
(22)
The nonlinear observation model and the linear delta obser-vationmodel needed for the computation of theKalman gainin the EKF are obtained by linearization of the propagatedstate vector and it can be expressed generically as
119910 isin R3119899 119910 = ℎ (119909)
Δ119910 isin R3119899 Δ119910 = 119867Δ119909
(23)
Thus at each time epoch from the observation equationsthe measurement vector 119910 is computed combining uncom-bined measurements The choice of the measurement set toconsider thus changes only the following (1) 119879 matrix forobtaining the EKF combinedmeasurement vector 119910 from theuncombined one 119911 (2) ℎ(119909) nonlinear observation functionand (3) 119867matrix of the linearized observation model Theseitems are discussed in the following subsections for eachmeasurement set
421 Set 3119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879
=(
(
0119899
0119899
11 minus 1205742
1119899minus
1205742
1 minus 12057421119899
121119899
0119899
121119899
0119899
minus
120582NL1205821
1119899minus
120582NL1205822
1119899
120582WL1205821
1119899
minus
120582WL1205822
1119899
)
)
ℎ (119909)
= (
120588119895
119860119861(b)
120588119895
119860119861(b)
0119899times1
)
+(
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
0119899
120582121119899
120582WL1119899 0119899
)(
NWL
N1)
119867 =(
nablab120588119895
11986011986103
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
nablab120588119895
11986011986103 0
119899
120582121119899
03 03 120582WL1119899 0119899
)
(24)
where 120588119895119860119861
vector stacks together 119899DD geometric termsnablab isthe gradient operator with respect to the baseline vector and0119899is the 119899-by-119899 null matrix
422 Set 4119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879 = (
1119899
0119899
0119899
0119899
1198793119899)
ℎ (119909) = (120588119895
119860119861(b)
ℎ3119899 (119909))
119867 = (nablab120588119895
11986011986103 0119899
0119899
1198673119899)
(25)
where the subscript ldquo3119899rdquo is used to indicate matrix andfunctions relevant to set 3119899 It is worth noting that sincethe ionospheric delay is cancelled and not included in thestate vector the implemented observation model for 119875
1
measurement is
(1198751)119895119896
119860119861= 120588119895119896
119860119861+ 120578119895119896
1119860119861 (26)
Comparing (4) to (26) it is evident that set 4119899 implicitlyassumes the DD ionospheric delay modelled as an additionalGaussian white noise affecting the 119875
1measurements In other
words considering that the DD ionospheric delay is onlya small fraction of the total ionospheric delays the DD1198751observable noise is modelled as if the ionospheric delay
was not time correlated but included within the white noiseerror This approach resembles that one used in [7 14] whereionospheric delays are modelled as random walk processescharacterized by large process noises and correlation times inthe order of the filter time step
5 Results
The reference EKF and the no-iono solutions have beenrun on GRACE data Comparisons among the solutionsare performed looking at the baseline magnitude estimationerror and at the capability to obtain correct estimates of theinteger ambiguities Both of them are estimated thanks to thehigh accuracy reference solutions which can be computedprocessing GRACE data [8] As expected application to mildand moderate ionospheric conditions not shown herein for
International Journal of Aerospace Engineering 7
0 1 2 3 4 5 6 7 8
minus2
0
2
Reference solutionmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
Time (s)
Time (s)
CorrectWrongUnknownFixed
times104
times104
Num
ber o
f IA
b
m
Figure 1 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for the reference solution
brevity suggest that the filter with Learrsquos model is capable toachieve a baseline estimation error which is the half of theno-iono approach (both set 3119899 and set 4119899) This behaviourchanges under strong ionospheric activity In order to showthis DOY286 (October 13th) 2011 has been selected for theanalysis in which the two GRACE spacecrafts are separatedof more than 200 km and ionospheric activity is extremelyintense Figures 1ndash3 report the baselinemagnitude estimationerror and the IA estimation performance for the referencesolution and the no-iono solutions respectively Specificallyonly L1 estimation performance is shown because wide lanefail rates are significantly lower than those on L1
Figure 1 shows that under strong ionospheric activityLearrsquos model is not able to support the integer estimationso a significant number of ambiguities is wrong and baselinemagnitude estimation errors larger than 1moccur IA estima-tion performance increases notably when set 3119899 is considered(see Figure 2) and the baseline estimation error reduces todecimetre scale in this case Finally with reference to set4119899 it is evident that the addition of the 119875
1measurements
is not a successful strategy when the ionospheric activityis intense Indeed DD ionospheric delays dominate over1198751measurement noise and so they cannot be modelled as
additional Gaussian white noise
6 Concluding Remarks
This paper has compared various strategies for compensat-ing ionospheric delays in long baseline relative position-ing applications for LEO spacecraft using dual-frequencyCDGPS techniques Based on a relative positioning techniquepreviously developed by the authors problem settings thatdo not require ionospheric delays estimation have beeninvestigated The ionosphere-free alternatives have been also
Time (s)
Time (s)0 1 2 3 4 5 6 7 8
No-iono solution with ldquo3nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
times104
times104
minus2
0
2
Num
ber o
f IA
b
m
CorrectWrongUnknownFixed
Figure 2 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 3119899
Time (s)
No-iono solution with ldquo4nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 8minus3
minus2
minus1
0
1
2
3
0 1 2 3 4 5 6 7 80
2
4
6
8
10
Num
ber o
f IA
times104
Time (s) times104
b
m
CorrectWrongUnknownFixed
Figure 3 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 4119899
compared with a reference solution making use of a stan-dard ionospheric delay model for spaceborne applicationsoriginally developed by Lear Results suggest that among thepossible alternatives and under strong ionospheric activitybest performance is achieved using the observation model
8 International Journal of Aerospace Engineering
made of ionosphere-free combinations of carrier-phase mea-surements GRAPHIC combinations on the L1 frequencyand Melbourne-Wubbena combinations Future work willdeal with the extension of these results to a more completedata set including different levels of the ionospheric activityThe ultimate goal is the introduction of quantitative tools toguide the selection between model-based and ionosphere-free approaches depending on the ionospheric activity andthe available ionospheric models
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The activities of Urbano Tancredi in this work have beencarried out also with the contribution of Regione Campaniain the framework of the ArchAero project financed bythe Regional Law n52002 for the promotion of scientificresearch in Campania
References
[1] S Leung and O Montenbruck ldquoReal-time navigation of for-mation-flying spacecraft using global-positioning-systemmea-surementsrdquo Journal of Guidance Control andDynamics vol 28no 2 pp 226ndash235 2005
[2] O Montenbruck T Ebinuma E G Lightsey and S Leung ldquoAreal-time kinematic GPS sensor for spacecraft relative naviga-tionrdquo Aerospace Science and Technology vol 6 no 6 pp 435ndash449 2002
[3] M L Psiaki and S Mohiuddin ldquoModeling analysis and sim-ulation of GPS carrier phase for spacecraft relative navigationrdquoJournal of Guidance Control and Dynamics vol 30 no 6 pp1628ndash1639 2007
[4] F Zuiani and M Vasile ldquoPreliminary design of debris removalmissions by means of simplified models for low-thrust many-revolution transfersrdquo International Journal of Aerospace Engi-neering vol 2012 Article ID 836250 22 pages 2012
[5] P M Xavier A Vıctor and S Santiago ldquoEnhancing the devel-opment of a particular network of aerodromes using EGNOSrdquoin Proceedings of the 56th International Astronautical CongressInternational Astronautical Federation Fukouka Japan 2005
[6] D JWing andW B Cotton ldquoFor spacious skies self-separationwith lsquoautonomous flight rulesrsquo in US domestic airspacerdquo inProceedings of the 11th AIAA Aviation Technology Integrationand Operations (ATIO) Conference September 2011
[7] R Kroes O Montenbruck W Bertiger and P Visser ldquoPreciseGRACE baseline determination using GPSrdquo GPS Solutions vol9 no 1 pp 21ndash31 2005
[8] U Tancredi A Renga and M Grassi ldquoIonospheric path delaymodels for spaceborne GPS receivers flying in formation withlarge baselinesrdquo Advances in Space Research vol 48 no 3 pp507ndash520 2011
[9] Y Gu G Campa and M Innocenti ldquoFormation flight controlrdquoInternational Journal of Aerospace Engineering vol 2011 ArticleID 798981 2 pages 2011
[10] T Dautermann ldquoCivil air navigation using GNSS enhancedby wide area satellite based augmentation systemsrdquo Progress inAerospace Sciences vol 67 pp 51ndash62 2014
[11] Y Xu W Sun and P Li ldquoA miniature integrated navigationsystem for rotary-wing unmanned aerial vehiclesrdquo InternationalJournal of Aerospace Engineering vol 2014 Article ID 74894013 pages 2014
[12] M-S Huang R M Narayanan Y Zhang and A FeinbergldquoTracking of noncooperative airborne targets using ADS-Bsignal and radar sensingrdquo International Journal of AerospaceEngineering vol 2013 Article ID 521630 12 pages 2013
[13] L Forlenza G Fasano D Accardo and A Moccia ldquoFlightperformance analysis of an image processing algorithm forintegrated sense-and-avoid systemsrdquo International Journal ofAerospace Engineering vol 2012 Article ID 542165 8 pages2012
[14] R Kroes Precise relative positioning of formation flying space-craft using GPS [PhD thesis] Delft University of TechnologyDelft The Netherlands 2006
[15] S-C Wu and Y E Bar-Sever ldquoReal-time sub-cm differentialorbit determination of two low-earth orbiters with GPS biasfixingrdquo inProceedings of the 19th International TechnicalMeetingof the Satellite Division of the Institution of Navigation (IONGNSS rsquo06) pp 2515ndash2522 Fort Worth Tex USA 2006
[16] S T Goh O Abdelkhalik and S A Zekavat ldquoImplementationof a differential geometric filter for spacecraft formation orbitestimationrdquo International Journal of Aerospace Engineering vol2012 Article ID 910496 13 pages 2012
[17] U Tancredi A Renga and M Grassi ldquoReal-time relative posi-tioning of spacecraft over long baselinesrdquo Journal of GuidanceControl and Dynamics vol 37 no 1 pp 47ndash58 2014
[18] T Richert and N El-Sheimy ldquoIonospheric modelingThe key toGNSS ambiguity resolutionrdquo GPS World pp 35ndash40 2005
[19] O Montenbruck M Wermuth and R Kahle ldquoGPS basedrelative navigation for the TanDEM-X missionmdashfirst flightresultsrdquo Navigation Journal of the Institute of Navigation vol58 no 4 pp 293ndash304 2011-2012
[20] B Li S Verhagen and P J G Teunissen ldquoRobustness of GNSSinteger ambiguity resolution in the presence of atmosphericbiasesrdquo GPS Solutions vol 18 no 2 pp 283ndash296 2014
[21] J Farrel andM BarthTheGlobal Positioning Systemand InertialNavigation chapter 5 McGraw-Hill New York NY USA 1999
[22] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications B W Parkinson and J J Spilker Edsvol 2 pp 559ndash592 American Institute of Aeronautics andAstronautics Washington DC USA 1996
[23] W G Melbourne ldquoThe case for ranging in GPS-based geodeticsystemsrdquo in Proceedings of the 1st Intenational Symposium onPrecise Positioning with the Global Positioning System pp 373ndash386 Ockville Md USA 1985
[24] G Wubbena ldquoSoftware developments for geodetic positioningwith GPS using TI 4100 code and carrier measurementsrdquoin Proceedings of the 1st Intenational Symposium on Precisepositioning with the Global Positioning System pp 403ndash412Rockville Md USA 1985
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 5
According to the results presented in Tables 1 and 2 theset of measurements including 119871 IF 1198661 and MW combina-tions is the one allowing a higher potential accuracy on boththe DD geometric term and the cycle ambiguities This set ofmeasurements is called set ldquo3119899rdquo in what follows A potentiallimitation of set 3119899 is that cycle ambiguities are present inall the three observation models Hence when the numberof fixed ambiguities is smaller than three the observationmodel provides no useful information to the EKF which isthus forced to rely only on its propagation model In thisparticular situation the EKF is expected to perform poorlyTo cope with this problem an additional set is consideredcalled set ldquo4119899rdquo and made of 119871 IF 1198661 and MW combinationsplus the uncombined 119875
1measurement The addition of 119875
1
observations allows the filter to rely on relative positioninginformation even when less than three cycle ambiguities arefixed
Because the various combinations have different observa-tion models selecting different sets of measurements affectsthe observability of the EKF state vector differently Theobservability of the system at hand is extremely involvedto be analyzed Indeed the dynamical system is nonlinearand evolves on a time-varying trajectory Its linearization isthus time-varying and depends on the state estimate Theobservation model is nonlinear due to the DD geometryterms Its linearization depends on the state trajectory andthus it is time-varying as well Both the dynamical andthe observation models depend on an exogenous vectorparameter (eg the absolute position of one of the receivers)[17] Finally both the EKF state vector and the measurementsdepend on the number of DD couples 119899 which is time-varying as well In such a condition instead of developinga complicated observability analysis a different approach ispursued which is based on numerically evaluating the EKFperformances using both set 3119899 and set 4119899 as shown in thenext section
41 No-Iono EKF Dynamic Model The no-iono EKF statevector is defined as
119909 isin R6+2119899
119909 = (b b NWL N1)119879
(16)
Concerning the process model the baseline dynamics isdescribed by the nonlinear relative Keplerian model with J2effects included This model is equal to the one used in the
VTEC-based EKF [17] and is denoted at the time epoch 119905119896as
follows
b = 119891 (b b r119860)
(
bb)
119896+1
= Φ119887119896(
bb)
119896
+w119887
119864 (w119887w119879119887) = 119876
119887
(17)
where 119891 is the nonlinear baseline propagation function r119860
denotes the receiver 119860 position vector in ECEF Φ is thetime-discrete baseline propagation matrix w
119887is the baseline
process noise vector and E indicates themathematical expec-tation
Cycle ambiguities are instead assumed to be constantHowever a small process noise w
119873might be injected letting
them be modeled as a random constant plus random walkThe model is equal to the one used in the VTEC-basedEKF [17] and is denoted by (1
119899is the 119899-by-119899 identity
matrix)
(
NWL
N1) = 0
(
NWL
N1)
119896+1= 1119899(
NWL
N1)
119896
+w119873
119864 (w119873w119879119873) = 119876
119873= 120590
21198731119899
(18)
42 No-Iono EKF Observation Model The two differentobservation models share some common structure whichis discussed first Then details on each of the two modelswill be given The no-iono EKF measurement vector 119910 ismade of a series of measurement combinations depend-ing on the chosen set Each measurement combinationstacks together the combinations for each of the 119899 DDcouples
X isin R119899
X = ((119883)01119860119861
sdot sdot sdot (119883)0119899119860119861)
119879
(19)
The covariance matrix of 119910 has a nonsparse structure dueto the presence of the various uncombined measurementsin more combinations and because of the full covariancematrix of each of the uncombined measurements X In orderto have the desired covariance matrix cov(119910) it is possibleto introduce the vector 119911 that stacks the uncombined DDobservations 119875
1 119871
2
119911 = ( (1198751)01119860119861
sdot sdot sdot (1198751)0119899119860119861
(1198752)01119860119861
sdot sdot sdot (1198752)0119899119860119861
(1198711)01119860119861
sdot sdot sdot (1198711)0119899119860119861
(1198712)01119860119861
sdot sdot sdot (1198712)0119899119860119861)
119879
cov (119911) =(
12059021198751119863 0
12059021198752119863
1205902119871119863
0 1205902119871119863
)
(20)
6 International Journal of Aerospace Engineering
The chosen combined measurements set can be expressed asa linear function of the uncombined measurement vector 119911by means of a matrix 119879 depending on the chosen set Thematrix cov(119910) can be obtained by cov(119911) applying the lineartransformation
119910 = 119879119911
119877 = cov (119910) = 119879 cov (119911) 119879119879(21)
The observation model relating the EKF state to the observ-ables is nonlinear due to the geometric term The geometricterm is independent from the chosen measurement set andthus is discussed herein The 119899 DD geometric terms arerelated to the baseline by the following equations (119877119894 denotesthe 119894th GPS satellite position vector in ECEF)
120588119895119896
119860119861=
10038171003817100381710038171003817R119896 minus (r
119860+ b)1003817100381710038171003817
1003817minus
10038171003817100381710038171003817R119896 minus r
119860
10038171003817100381710038171003817minus
10038171003817100381710038171003817R119895 minus (r
119860+ b)1003817100381710038171003817
1003817
+
10038171003817100381710038171003817R119895 minus r
119860
10038171003817100381710038171003817
(22)
The nonlinear observation model and the linear delta obser-vationmodel needed for the computation of theKalman gainin the EKF are obtained by linearization of the propagatedstate vector and it can be expressed generically as
119910 isin R3119899 119910 = ℎ (119909)
Δ119910 isin R3119899 Δ119910 = 119867Δ119909
(23)
Thus at each time epoch from the observation equationsthe measurement vector 119910 is computed combining uncom-bined measurements The choice of the measurement set toconsider thus changes only the following (1) 119879 matrix forobtaining the EKF combinedmeasurement vector 119910 from theuncombined one 119911 (2) ℎ(119909) nonlinear observation functionand (3) 119867matrix of the linearized observation model Theseitems are discussed in the following subsections for eachmeasurement set
421 Set 3119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879
=(
(
0119899
0119899
11 minus 1205742
1119899minus
1205742
1 minus 12057421119899
121119899
0119899
121119899
0119899
minus
120582NL1205821
1119899minus
120582NL1205822
1119899
120582WL1205821
1119899
minus
120582WL1205822
1119899
)
)
ℎ (119909)
= (
120588119895
119860119861(b)
120588119895
119860119861(b)
0119899times1
)
+(
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
0119899
120582121119899
120582WL1119899 0119899
)(
NWL
N1)
119867 =(
nablab120588119895
11986011986103
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
nablab120588119895
11986011986103 0
119899
120582121119899
03 03 120582WL1119899 0119899
)
(24)
where 120588119895119860119861
vector stacks together 119899DD geometric termsnablab isthe gradient operator with respect to the baseline vector and0119899is the 119899-by-119899 null matrix
422 Set 4119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879 = (
1119899
0119899
0119899
0119899
1198793119899)
ℎ (119909) = (120588119895
119860119861(b)
ℎ3119899 (119909))
119867 = (nablab120588119895
11986011986103 0119899
0119899
1198673119899)
(25)
where the subscript ldquo3119899rdquo is used to indicate matrix andfunctions relevant to set 3119899 It is worth noting that sincethe ionospheric delay is cancelled and not included in thestate vector the implemented observation model for 119875
1
measurement is
(1198751)119895119896
119860119861= 120588119895119896
119860119861+ 120578119895119896
1119860119861 (26)
Comparing (4) to (26) it is evident that set 4119899 implicitlyassumes the DD ionospheric delay modelled as an additionalGaussian white noise affecting the 119875
1measurements In other
words considering that the DD ionospheric delay is onlya small fraction of the total ionospheric delays the DD1198751observable noise is modelled as if the ionospheric delay
was not time correlated but included within the white noiseerror This approach resembles that one used in [7 14] whereionospheric delays are modelled as random walk processescharacterized by large process noises and correlation times inthe order of the filter time step
5 Results
The reference EKF and the no-iono solutions have beenrun on GRACE data Comparisons among the solutionsare performed looking at the baseline magnitude estimationerror and at the capability to obtain correct estimates of theinteger ambiguities Both of them are estimated thanks to thehigh accuracy reference solutions which can be computedprocessing GRACE data [8] As expected application to mildand moderate ionospheric conditions not shown herein for
International Journal of Aerospace Engineering 7
0 1 2 3 4 5 6 7 8
minus2
0
2
Reference solutionmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
Time (s)
Time (s)
CorrectWrongUnknownFixed
times104
times104
Num
ber o
f IA
b
m
Figure 1 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for the reference solution
brevity suggest that the filter with Learrsquos model is capable toachieve a baseline estimation error which is the half of theno-iono approach (both set 3119899 and set 4119899) This behaviourchanges under strong ionospheric activity In order to showthis DOY286 (October 13th) 2011 has been selected for theanalysis in which the two GRACE spacecrafts are separatedof more than 200 km and ionospheric activity is extremelyintense Figures 1ndash3 report the baselinemagnitude estimationerror and the IA estimation performance for the referencesolution and the no-iono solutions respectively Specificallyonly L1 estimation performance is shown because wide lanefail rates are significantly lower than those on L1
Figure 1 shows that under strong ionospheric activityLearrsquos model is not able to support the integer estimationso a significant number of ambiguities is wrong and baselinemagnitude estimation errors larger than 1moccur IA estima-tion performance increases notably when set 3119899 is considered(see Figure 2) and the baseline estimation error reduces todecimetre scale in this case Finally with reference to set4119899 it is evident that the addition of the 119875
1measurements
is not a successful strategy when the ionospheric activityis intense Indeed DD ionospheric delays dominate over1198751measurement noise and so they cannot be modelled as
additional Gaussian white noise
6 Concluding Remarks
This paper has compared various strategies for compensat-ing ionospheric delays in long baseline relative position-ing applications for LEO spacecraft using dual-frequencyCDGPS techniques Based on a relative positioning techniquepreviously developed by the authors problem settings thatdo not require ionospheric delays estimation have beeninvestigated The ionosphere-free alternatives have been also
Time (s)
Time (s)0 1 2 3 4 5 6 7 8
No-iono solution with ldquo3nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
times104
times104
minus2
0
2
Num
ber o
f IA
b
m
CorrectWrongUnknownFixed
Figure 2 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 3119899
Time (s)
No-iono solution with ldquo4nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 8minus3
minus2
minus1
0
1
2
3
0 1 2 3 4 5 6 7 80
2
4
6
8
10
Num
ber o
f IA
times104
Time (s) times104
b
m
CorrectWrongUnknownFixed
Figure 3 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 4119899
compared with a reference solution making use of a stan-dard ionospheric delay model for spaceborne applicationsoriginally developed by Lear Results suggest that among thepossible alternatives and under strong ionospheric activitybest performance is achieved using the observation model
8 International Journal of Aerospace Engineering
made of ionosphere-free combinations of carrier-phase mea-surements GRAPHIC combinations on the L1 frequencyand Melbourne-Wubbena combinations Future work willdeal with the extension of these results to a more completedata set including different levels of the ionospheric activityThe ultimate goal is the introduction of quantitative tools toguide the selection between model-based and ionosphere-free approaches depending on the ionospheric activity andthe available ionospheric models
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The activities of Urbano Tancredi in this work have beencarried out also with the contribution of Regione Campaniain the framework of the ArchAero project financed bythe Regional Law n52002 for the promotion of scientificresearch in Campania
References
[1] S Leung and O Montenbruck ldquoReal-time navigation of for-mation-flying spacecraft using global-positioning-systemmea-surementsrdquo Journal of Guidance Control andDynamics vol 28no 2 pp 226ndash235 2005
[2] O Montenbruck T Ebinuma E G Lightsey and S Leung ldquoAreal-time kinematic GPS sensor for spacecraft relative naviga-tionrdquo Aerospace Science and Technology vol 6 no 6 pp 435ndash449 2002
[3] M L Psiaki and S Mohiuddin ldquoModeling analysis and sim-ulation of GPS carrier phase for spacecraft relative navigationrdquoJournal of Guidance Control and Dynamics vol 30 no 6 pp1628ndash1639 2007
[4] F Zuiani and M Vasile ldquoPreliminary design of debris removalmissions by means of simplified models for low-thrust many-revolution transfersrdquo International Journal of Aerospace Engi-neering vol 2012 Article ID 836250 22 pages 2012
[5] P M Xavier A Vıctor and S Santiago ldquoEnhancing the devel-opment of a particular network of aerodromes using EGNOSrdquoin Proceedings of the 56th International Astronautical CongressInternational Astronautical Federation Fukouka Japan 2005
[6] D JWing andW B Cotton ldquoFor spacious skies self-separationwith lsquoautonomous flight rulesrsquo in US domestic airspacerdquo inProceedings of the 11th AIAA Aviation Technology Integrationand Operations (ATIO) Conference September 2011
[7] R Kroes O Montenbruck W Bertiger and P Visser ldquoPreciseGRACE baseline determination using GPSrdquo GPS Solutions vol9 no 1 pp 21ndash31 2005
[8] U Tancredi A Renga and M Grassi ldquoIonospheric path delaymodels for spaceborne GPS receivers flying in formation withlarge baselinesrdquo Advances in Space Research vol 48 no 3 pp507ndash520 2011
[9] Y Gu G Campa and M Innocenti ldquoFormation flight controlrdquoInternational Journal of Aerospace Engineering vol 2011 ArticleID 798981 2 pages 2011
[10] T Dautermann ldquoCivil air navigation using GNSS enhancedby wide area satellite based augmentation systemsrdquo Progress inAerospace Sciences vol 67 pp 51ndash62 2014
[11] Y Xu W Sun and P Li ldquoA miniature integrated navigationsystem for rotary-wing unmanned aerial vehiclesrdquo InternationalJournal of Aerospace Engineering vol 2014 Article ID 74894013 pages 2014
[12] M-S Huang R M Narayanan Y Zhang and A FeinbergldquoTracking of noncooperative airborne targets using ADS-Bsignal and radar sensingrdquo International Journal of AerospaceEngineering vol 2013 Article ID 521630 12 pages 2013
[13] L Forlenza G Fasano D Accardo and A Moccia ldquoFlightperformance analysis of an image processing algorithm forintegrated sense-and-avoid systemsrdquo International Journal ofAerospace Engineering vol 2012 Article ID 542165 8 pages2012
[14] R Kroes Precise relative positioning of formation flying space-craft using GPS [PhD thesis] Delft University of TechnologyDelft The Netherlands 2006
[15] S-C Wu and Y E Bar-Sever ldquoReal-time sub-cm differentialorbit determination of two low-earth orbiters with GPS biasfixingrdquo inProceedings of the 19th International TechnicalMeetingof the Satellite Division of the Institution of Navigation (IONGNSS rsquo06) pp 2515ndash2522 Fort Worth Tex USA 2006
[16] S T Goh O Abdelkhalik and S A Zekavat ldquoImplementationof a differential geometric filter for spacecraft formation orbitestimationrdquo International Journal of Aerospace Engineering vol2012 Article ID 910496 13 pages 2012
[17] U Tancredi A Renga and M Grassi ldquoReal-time relative posi-tioning of spacecraft over long baselinesrdquo Journal of GuidanceControl and Dynamics vol 37 no 1 pp 47ndash58 2014
[18] T Richert and N El-Sheimy ldquoIonospheric modelingThe key toGNSS ambiguity resolutionrdquo GPS World pp 35ndash40 2005
[19] O Montenbruck M Wermuth and R Kahle ldquoGPS basedrelative navigation for the TanDEM-X missionmdashfirst flightresultsrdquo Navigation Journal of the Institute of Navigation vol58 no 4 pp 293ndash304 2011-2012
[20] B Li S Verhagen and P J G Teunissen ldquoRobustness of GNSSinteger ambiguity resolution in the presence of atmosphericbiasesrdquo GPS Solutions vol 18 no 2 pp 283ndash296 2014
[21] J Farrel andM BarthTheGlobal Positioning Systemand InertialNavigation chapter 5 McGraw-Hill New York NY USA 1999
[22] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications B W Parkinson and J J Spilker Edsvol 2 pp 559ndash592 American Institute of Aeronautics andAstronautics Washington DC USA 1996
[23] W G Melbourne ldquoThe case for ranging in GPS-based geodeticsystemsrdquo in Proceedings of the 1st Intenational Symposium onPrecise Positioning with the Global Positioning System pp 373ndash386 Ockville Md USA 1985
[24] G Wubbena ldquoSoftware developments for geodetic positioningwith GPS using TI 4100 code and carrier measurementsrdquoin Proceedings of the 1st Intenational Symposium on Precisepositioning with the Global Positioning System pp 403ndash412Rockville Md USA 1985
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Aerospace Engineering
The chosen combined measurements set can be expressed asa linear function of the uncombined measurement vector 119911by means of a matrix 119879 depending on the chosen set Thematrix cov(119910) can be obtained by cov(119911) applying the lineartransformation
119910 = 119879119911
119877 = cov (119910) = 119879 cov (119911) 119879119879(21)
The observation model relating the EKF state to the observ-ables is nonlinear due to the geometric term The geometricterm is independent from the chosen measurement set andthus is discussed herein The 119899 DD geometric terms arerelated to the baseline by the following equations (119877119894 denotesthe 119894th GPS satellite position vector in ECEF)
120588119895119896
119860119861=
10038171003817100381710038171003817R119896 minus (r
119860+ b)1003817100381710038171003817
1003817minus
10038171003817100381710038171003817R119896 minus r
119860
10038171003817100381710038171003817minus
10038171003817100381710038171003817R119895 minus (r
119860+ b)1003817100381710038171003817
1003817
+
10038171003817100381710038171003817R119895 minus r
119860
10038171003817100381710038171003817
(22)
The nonlinear observation model and the linear delta obser-vationmodel needed for the computation of theKalman gainin the EKF are obtained by linearization of the propagatedstate vector and it can be expressed generically as
119910 isin R3119899 119910 = ℎ (119909)
Δ119910 isin R3119899 Δ119910 = 119867Δ119909
(23)
Thus at each time epoch from the observation equationsthe measurement vector 119910 is computed combining uncom-bined measurements The choice of the measurement set toconsider thus changes only the following (1) 119879 matrix forobtaining the EKF combinedmeasurement vector 119910 from theuncombined one 119911 (2) ℎ(119909) nonlinear observation functionand (3) 119867matrix of the linearized observation model Theseitems are discussed in the following subsections for eachmeasurement set
421 Set 3119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879
=(
(
0119899
0119899
11 minus 1205742
1119899minus
1205742
1 minus 12057421119899
121119899
0119899
121119899
0119899
minus
120582NL1205821
1119899minus
120582NL1205822
1119899
120582WL1205821
1119899
minus
120582WL1205822
1119899
)
)
ℎ (119909)
= (
120588119895
119860119861(b)
120588119895
119860119861(b)
0119899times1
)
+(
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
0119899
120582121119899
120582WL1119899 0119899
)(
NWL
N1)
119867 =(
nablab120588119895
11986011986103
1205821120574
1 minus 12057421119899
12058211 + 120574
1119899
nablab120588119895
11986011986103 0
119899
120582121119899
03 03 120582WL1119899 0119899
)
(24)
where 120588119895119860119861
vector stacks together 119899DD geometric termsnablab isthe gradient operator with respect to the baseline vector and0119899is the 119899-by-119899 null matrix
422 Set 4119899 The 119879 matrix the ℎ(119909) function and the 119867matrix take the following form
119879 = (
1119899
0119899
0119899
0119899
1198793119899)
ℎ (119909) = (120588119895
119860119861(b)
ℎ3119899 (119909))
119867 = (nablab120588119895
11986011986103 0119899
0119899
1198673119899)
(25)
where the subscript ldquo3119899rdquo is used to indicate matrix andfunctions relevant to set 3119899 It is worth noting that sincethe ionospheric delay is cancelled and not included in thestate vector the implemented observation model for 119875
1
measurement is
(1198751)119895119896
119860119861= 120588119895119896
119860119861+ 120578119895119896
1119860119861 (26)
Comparing (4) to (26) it is evident that set 4119899 implicitlyassumes the DD ionospheric delay modelled as an additionalGaussian white noise affecting the 119875
1measurements In other
words considering that the DD ionospheric delay is onlya small fraction of the total ionospheric delays the DD1198751observable noise is modelled as if the ionospheric delay
was not time correlated but included within the white noiseerror This approach resembles that one used in [7 14] whereionospheric delays are modelled as random walk processescharacterized by large process noises and correlation times inthe order of the filter time step
5 Results
The reference EKF and the no-iono solutions have beenrun on GRACE data Comparisons among the solutionsare performed looking at the baseline magnitude estimationerror and at the capability to obtain correct estimates of theinteger ambiguities Both of them are estimated thanks to thehigh accuracy reference solutions which can be computedprocessing GRACE data [8] As expected application to mildand moderate ionospheric conditions not shown herein for
International Journal of Aerospace Engineering 7
0 1 2 3 4 5 6 7 8
minus2
0
2
Reference solutionmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
Time (s)
Time (s)
CorrectWrongUnknownFixed
times104
times104
Num
ber o
f IA
b
m
Figure 1 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for the reference solution
brevity suggest that the filter with Learrsquos model is capable toachieve a baseline estimation error which is the half of theno-iono approach (both set 3119899 and set 4119899) This behaviourchanges under strong ionospheric activity In order to showthis DOY286 (October 13th) 2011 has been selected for theanalysis in which the two GRACE spacecrafts are separatedof more than 200 km and ionospheric activity is extremelyintense Figures 1ndash3 report the baselinemagnitude estimationerror and the IA estimation performance for the referencesolution and the no-iono solutions respectively Specificallyonly L1 estimation performance is shown because wide lanefail rates are significantly lower than those on L1
Figure 1 shows that under strong ionospheric activityLearrsquos model is not able to support the integer estimationso a significant number of ambiguities is wrong and baselinemagnitude estimation errors larger than 1moccur IA estima-tion performance increases notably when set 3119899 is considered(see Figure 2) and the baseline estimation error reduces todecimetre scale in this case Finally with reference to set4119899 it is evident that the addition of the 119875
1measurements
is not a successful strategy when the ionospheric activityis intense Indeed DD ionospheric delays dominate over1198751measurement noise and so they cannot be modelled as
additional Gaussian white noise
6 Concluding Remarks
This paper has compared various strategies for compensat-ing ionospheric delays in long baseline relative position-ing applications for LEO spacecraft using dual-frequencyCDGPS techniques Based on a relative positioning techniquepreviously developed by the authors problem settings thatdo not require ionospheric delays estimation have beeninvestigated The ionosphere-free alternatives have been also
Time (s)
Time (s)0 1 2 3 4 5 6 7 8
No-iono solution with ldquo3nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
times104
times104
minus2
0
2
Num
ber o
f IA
b
m
CorrectWrongUnknownFixed
Figure 2 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 3119899
Time (s)
No-iono solution with ldquo4nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 8minus3
minus2
minus1
0
1
2
3
0 1 2 3 4 5 6 7 80
2
4
6
8
10
Num
ber o
f IA
times104
Time (s) times104
b
m
CorrectWrongUnknownFixed
Figure 3 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 4119899
compared with a reference solution making use of a stan-dard ionospheric delay model for spaceborne applicationsoriginally developed by Lear Results suggest that among thepossible alternatives and under strong ionospheric activitybest performance is achieved using the observation model
8 International Journal of Aerospace Engineering
made of ionosphere-free combinations of carrier-phase mea-surements GRAPHIC combinations on the L1 frequencyand Melbourne-Wubbena combinations Future work willdeal with the extension of these results to a more completedata set including different levels of the ionospheric activityThe ultimate goal is the introduction of quantitative tools toguide the selection between model-based and ionosphere-free approaches depending on the ionospheric activity andthe available ionospheric models
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The activities of Urbano Tancredi in this work have beencarried out also with the contribution of Regione Campaniain the framework of the ArchAero project financed bythe Regional Law n52002 for the promotion of scientificresearch in Campania
References
[1] S Leung and O Montenbruck ldquoReal-time navigation of for-mation-flying spacecraft using global-positioning-systemmea-surementsrdquo Journal of Guidance Control andDynamics vol 28no 2 pp 226ndash235 2005
[2] O Montenbruck T Ebinuma E G Lightsey and S Leung ldquoAreal-time kinematic GPS sensor for spacecraft relative naviga-tionrdquo Aerospace Science and Technology vol 6 no 6 pp 435ndash449 2002
[3] M L Psiaki and S Mohiuddin ldquoModeling analysis and sim-ulation of GPS carrier phase for spacecraft relative navigationrdquoJournal of Guidance Control and Dynamics vol 30 no 6 pp1628ndash1639 2007
[4] F Zuiani and M Vasile ldquoPreliminary design of debris removalmissions by means of simplified models for low-thrust many-revolution transfersrdquo International Journal of Aerospace Engi-neering vol 2012 Article ID 836250 22 pages 2012
[5] P M Xavier A Vıctor and S Santiago ldquoEnhancing the devel-opment of a particular network of aerodromes using EGNOSrdquoin Proceedings of the 56th International Astronautical CongressInternational Astronautical Federation Fukouka Japan 2005
[6] D JWing andW B Cotton ldquoFor spacious skies self-separationwith lsquoautonomous flight rulesrsquo in US domestic airspacerdquo inProceedings of the 11th AIAA Aviation Technology Integrationand Operations (ATIO) Conference September 2011
[7] R Kroes O Montenbruck W Bertiger and P Visser ldquoPreciseGRACE baseline determination using GPSrdquo GPS Solutions vol9 no 1 pp 21ndash31 2005
[8] U Tancredi A Renga and M Grassi ldquoIonospheric path delaymodels for spaceborne GPS receivers flying in formation withlarge baselinesrdquo Advances in Space Research vol 48 no 3 pp507ndash520 2011
[9] Y Gu G Campa and M Innocenti ldquoFormation flight controlrdquoInternational Journal of Aerospace Engineering vol 2011 ArticleID 798981 2 pages 2011
[10] T Dautermann ldquoCivil air navigation using GNSS enhancedby wide area satellite based augmentation systemsrdquo Progress inAerospace Sciences vol 67 pp 51ndash62 2014
[11] Y Xu W Sun and P Li ldquoA miniature integrated navigationsystem for rotary-wing unmanned aerial vehiclesrdquo InternationalJournal of Aerospace Engineering vol 2014 Article ID 74894013 pages 2014
[12] M-S Huang R M Narayanan Y Zhang and A FeinbergldquoTracking of noncooperative airborne targets using ADS-Bsignal and radar sensingrdquo International Journal of AerospaceEngineering vol 2013 Article ID 521630 12 pages 2013
[13] L Forlenza G Fasano D Accardo and A Moccia ldquoFlightperformance analysis of an image processing algorithm forintegrated sense-and-avoid systemsrdquo International Journal ofAerospace Engineering vol 2012 Article ID 542165 8 pages2012
[14] R Kroes Precise relative positioning of formation flying space-craft using GPS [PhD thesis] Delft University of TechnologyDelft The Netherlands 2006
[15] S-C Wu and Y E Bar-Sever ldquoReal-time sub-cm differentialorbit determination of two low-earth orbiters with GPS biasfixingrdquo inProceedings of the 19th International TechnicalMeetingof the Satellite Division of the Institution of Navigation (IONGNSS rsquo06) pp 2515ndash2522 Fort Worth Tex USA 2006
[16] S T Goh O Abdelkhalik and S A Zekavat ldquoImplementationof a differential geometric filter for spacecraft formation orbitestimationrdquo International Journal of Aerospace Engineering vol2012 Article ID 910496 13 pages 2012
[17] U Tancredi A Renga and M Grassi ldquoReal-time relative posi-tioning of spacecraft over long baselinesrdquo Journal of GuidanceControl and Dynamics vol 37 no 1 pp 47ndash58 2014
[18] T Richert and N El-Sheimy ldquoIonospheric modelingThe key toGNSS ambiguity resolutionrdquo GPS World pp 35ndash40 2005
[19] O Montenbruck M Wermuth and R Kahle ldquoGPS basedrelative navigation for the TanDEM-X missionmdashfirst flightresultsrdquo Navigation Journal of the Institute of Navigation vol58 no 4 pp 293ndash304 2011-2012
[20] B Li S Verhagen and P J G Teunissen ldquoRobustness of GNSSinteger ambiguity resolution in the presence of atmosphericbiasesrdquo GPS Solutions vol 18 no 2 pp 283ndash296 2014
[21] J Farrel andM BarthTheGlobal Positioning Systemand InertialNavigation chapter 5 McGraw-Hill New York NY USA 1999
[22] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications B W Parkinson and J J Spilker Edsvol 2 pp 559ndash592 American Institute of Aeronautics andAstronautics Washington DC USA 1996
[23] W G Melbourne ldquoThe case for ranging in GPS-based geodeticsystemsrdquo in Proceedings of the 1st Intenational Symposium onPrecise Positioning with the Global Positioning System pp 373ndash386 Ockville Md USA 1985
[24] G Wubbena ldquoSoftware developments for geodetic positioningwith GPS using TI 4100 code and carrier measurementsrdquoin Proceedings of the 1st Intenational Symposium on Precisepositioning with the Global Positioning System pp 403ndash412Rockville Md USA 1985
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 7
0 1 2 3 4 5 6 7 8
minus2
0
2
Reference solutionmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
Time (s)
Time (s)
CorrectWrongUnknownFixed
times104
times104
Num
ber o
f IA
b
m
Figure 1 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for the reference solution
brevity suggest that the filter with Learrsquos model is capable toachieve a baseline estimation error which is the half of theno-iono approach (both set 3119899 and set 4119899) This behaviourchanges under strong ionospheric activity In order to showthis DOY286 (October 13th) 2011 has been selected for theanalysis in which the two GRACE spacecrafts are separatedof more than 200 km and ionospheric activity is extremelyintense Figures 1ndash3 report the baselinemagnitude estimationerror and the IA estimation performance for the referencesolution and the no-iono solutions respectively Specificallyonly L1 estimation performance is shown because wide lanefail rates are significantly lower than those on L1
Figure 1 shows that under strong ionospheric activityLearrsquos model is not able to support the integer estimationso a significant number of ambiguities is wrong and baselinemagnitude estimation errors larger than 1moccur IA estima-tion performance increases notably when set 3119899 is considered(see Figure 2) and the baseline estimation error reduces todecimetre scale in this case Finally with reference to set4119899 it is evident that the addition of the 119875
1measurements
is not a successful strategy when the ionospheric activityis intense Indeed DD ionospheric delays dominate over1198751measurement noise and so they cannot be modelled as
additional Gaussian white noise
6 Concluding Remarks
This paper has compared various strategies for compensat-ing ionospheric delays in long baseline relative position-ing applications for LEO spacecraft using dual-frequencyCDGPS techniques Based on a relative positioning techniquepreviously developed by the authors problem settings thatdo not require ionospheric delays estimation have beeninvestigated The ionosphere-free alternatives have been also
Time (s)
Time (s)0 1 2 3 4 5 6 7 8
No-iono solution with ldquo3nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 80
5
10
times104
times104
minus2
0
2
Num
ber o
f IA
b
m
CorrectWrongUnknownFixed
Figure 2 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 3119899
Time (s)
No-iono solution with ldquo4nrdquo measurementsmdashOct 13 2011
0 1 2 3 4 5 6 7 8minus3
minus2
minus1
0
1
2
3
0 1 2 3 4 5 6 7 80
2
4
6
8
10
Num
ber o
f IA
times104
Time (s) times104
b
m
CorrectWrongUnknownFixed
Figure 3 Baseline magnitude estimation error and L1 ambiguitiesestimation performance for set 4119899
compared with a reference solution making use of a stan-dard ionospheric delay model for spaceborne applicationsoriginally developed by Lear Results suggest that among thepossible alternatives and under strong ionospheric activitybest performance is achieved using the observation model
8 International Journal of Aerospace Engineering
made of ionosphere-free combinations of carrier-phase mea-surements GRAPHIC combinations on the L1 frequencyand Melbourne-Wubbena combinations Future work willdeal with the extension of these results to a more completedata set including different levels of the ionospheric activityThe ultimate goal is the introduction of quantitative tools toguide the selection between model-based and ionosphere-free approaches depending on the ionospheric activity andthe available ionospheric models
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The activities of Urbano Tancredi in this work have beencarried out also with the contribution of Regione Campaniain the framework of the ArchAero project financed bythe Regional Law n52002 for the promotion of scientificresearch in Campania
References
[1] S Leung and O Montenbruck ldquoReal-time navigation of for-mation-flying spacecraft using global-positioning-systemmea-surementsrdquo Journal of Guidance Control andDynamics vol 28no 2 pp 226ndash235 2005
[2] O Montenbruck T Ebinuma E G Lightsey and S Leung ldquoAreal-time kinematic GPS sensor for spacecraft relative naviga-tionrdquo Aerospace Science and Technology vol 6 no 6 pp 435ndash449 2002
[3] M L Psiaki and S Mohiuddin ldquoModeling analysis and sim-ulation of GPS carrier phase for spacecraft relative navigationrdquoJournal of Guidance Control and Dynamics vol 30 no 6 pp1628ndash1639 2007
[4] F Zuiani and M Vasile ldquoPreliminary design of debris removalmissions by means of simplified models for low-thrust many-revolution transfersrdquo International Journal of Aerospace Engi-neering vol 2012 Article ID 836250 22 pages 2012
[5] P M Xavier A Vıctor and S Santiago ldquoEnhancing the devel-opment of a particular network of aerodromes using EGNOSrdquoin Proceedings of the 56th International Astronautical CongressInternational Astronautical Federation Fukouka Japan 2005
[6] D JWing andW B Cotton ldquoFor spacious skies self-separationwith lsquoautonomous flight rulesrsquo in US domestic airspacerdquo inProceedings of the 11th AIAA Aviation Technology Integrationand Operations (ATIO) Conference September 2011
[7] R Kroes O Montenbruck W Bertiger and P Visser ldquoPreciseGRACE baseline determination using GPSrdquo GPS Solutions vol9 no 1 pp 21ndash31 2005
[8] U Tancredi A Renga and M Grassi ldquoIonospheric path delaymodels for spaceborne GPS receivers flying in formation withlarge baselinesrdquo Advances in Space Research vol 48 no 3 pp507ndash520 2011
[9] Y Gu G Campa and M Innocenti ldquoFormation flight controlrdquoInternational Journal of Aerospace Engineering vol 2011 ArticleID 798981 2 pages 2011
[10] T Dautermann ldquoCivil air navigation using GNSS enhancedby wide area satellite based augmentation systemsrdquo Progress inAerospace Sciences vol 67 pp 51ndash62 2014
[11] Y Xu W Sun and P Li ldquoA miniature integrated navigationsystem for rotary-wing unmanned aerial vehiclesrdquo InternationalJournal of Aerospace Engineering vol 2014 Article ID 74894013 pages 2014
[12] M-S Huang R M Narayanan Y Zhang and A FeinbergldquoTracking of noncooperative airborne targets using ADS-Bsignal and radar sensingrdquo International Journal of AerospaceEngineering vol 2013 Article ID 521630 12 pages 2013
[13] L Forlenza G Fasano D Accardo and A Moccia ldquoFlightperformance analysis of an image processing algorithm forintegrated sense-and-avoid systemsrdquo International Journal ofAerospace Engineering vol 2012 Article ID 542165 8 pages2012
[14] R Kroes Precise relative positioning of formation flying space-craft using GPS [PhD thesis] Delft University of TechnologyDelft The Netherlands 2006
[15] S-C Wu and Y E Bar-Sever ldquoReal-time sub-cm differentialorbit determination of two low-earth orbiters with GPS biasfixingrdquo inProceedings of the 19th International TechnicalMeetingof the Satellite Division of the Institution of Navigation (IONGNSS rsquo06) pp 2515ndash2522 Fort Worth Tex USA 2006
[16] S T Goh O Abdelkhalik and S A Zekavat ldquoImplementationof a differential geometric filter for spacecraft formation orbitestimationrdquo International Journal of Aerospace Engineering vol2012 Article ID 910496 13 pages 2012
[17] U Tancredi A Renga and M Grassi ldquoReal-time relative posi-tioning of spacecraft over long baselinesrdquo Journal of GuidanceControl and Dynamics vol 37 no 1 pp 47ndash58 2014
[18] T Richert and N El-Sheimy ldquoIonospheric modelingThe key toGNSS ambiguity resolutionrdquo GPS World pp 35ndash40 2005
[19] O Montenbruck M Wermuth and R Kahle ldquoGPS basedrelative navigation for the TanDEM-X missionmdashfirst flightresultsrdquo Navigation Journal of the Institute of Navigation vol58 no 4 pp 293ndash304 2011-2012
[20] B Li S Verhagen and P J G Teunissen ldquoRobustness of GNSSinteger ambiguity resolution in the presence of atmosphericbiasesrdquo GPS Solutions vol 18 no 2 pp 283ndash296 2014
[21] J Farrel andM BarthTheGlobal Positioning Systemand InertialNavigation chapter 5 McGraw-Hill New York NY USA 1999
[22] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications B W Parkinson and J J Spilker Edsvol 2 pp 559ndash592 American Institute of Aeronautics andAstronautics Washington DC USA 1996
[23] W G Melbourne ldquoThe case for ranging in GPS-based geodeticsystemsrdquo in Proceedings of the 1st Intenational Symposium onPrecise Positioning with the Global Positioning System pp 373ndash386 Ockville Md USA 1985
[24] G Wubbena ldquoSoftware developments for geodetic positioningwith GPS using TI 4100 code and carrier measurementsrdquoin Proceedings of the 1st Intenational Symposium on Precisepositioning with the Global Positioning System pp 403ndash412Rockville Md USA 1985
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Aerospace Engineering
made of ionosphere-free combinations of carrier-phase mea-surements GRAPHIC combinations on the L1 frequencyand Melbourne-Wubbena combinations Future work willdeal with the extension of these results to a more completedata set including different levels of the ionospheric activityThe ultimate goal is the introduction of quantitative tools toguide the selection between model-based and ionosphere-free approaches depending on the ionospheric activity andthe available ionospheric models
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The activities of Urbano Tancredi in this work have beencarried out also with the contribution of Regione Campaniain the framework of the ArchAero project financed bythe Regional Law n52002 for the promotion of scientificresearch in Campania
References
[1] S Leung and O Montenbruck ldquoReal-time navigation of for-mation-flying spacecraft using global-positioning-systemmea-surementsrdquo Journal of Guidance Control andDynamics vol 28no 2 pp 226ndash235 2005
[2] O Montenbruck T Ebinuma E G Lightsey and S Leung ldquoAreal-time kinematic GPS sensor for spacecraft relative naviga-tionrdquo Aerospace Science and Technology vol 6 no 6 pp 435ndash449 2002
[3] M L Psiaki and S Mohiuddin ldquoModeling analysis and sim-ulation of GPS carrier phase for spacecraft relative navigationrdquoJournal of Guidance Control and Dynamics vol 30 no 6 pp1628ndash1639 2007
[4] F Zuiani and M Vasile ldquoPreliminary design of debris removalmissions by means of simplified models for low-thrust many-revolution transfersrdquo International Journal of Aerospace Engi-neering vol 2012 Article ID 836250 22 pages 2012
[5] P M Xavier A Vıctor and S Santiago ldquoEnhancing the devel-opment of a particular network of aerodromes using EGNOSrdquoin Proceedings of the 56th International Astronautical CongressInternational Astronautical Federation Fukouka Japan 2005
[6] D JWing andW B Cotton ldquoFor spacious skies self-separationwith lsquoautonomous flight rulesrsquo in US domestic airspacerdquo inProceedings of the 11th AIAA Aviation Technology Integrationand Operations (ATIO) Conference September 2011
[7] R Kroes O Montenbruck W Bertiger and P Visser ldquoPreciseGRACE baseline determination using GPSrdquo GPS Solutions vol9 no 1 pp 21ndash31 2005
[8] U Tancredi A Renga and M Grassi ldquoIonospheric path delaymodels for spaceborne GPS receivers flying in formation withlarge baselinesrdquo Advances in Space Research vol 48 no 3 pp507ndash520 2011
[9] Y Gu G Campa and M Innocenti ldquoFormation flight controlrdquoInternational Journal of Aerospace Engineering vol 2011 ArticleID 798981 2 pages 2011
[10] T Dautermann ldquoCivil air navigation using GNSS enhancedby wide area satellite based augmentation systemsrdquo Progress inAerospace Sciences vol 67 pp 51ndash62 2014
[11] Y Xu W Sun and P Li ldquoA miniature integrated navigationsystem for rotary-wing unmanned aerial vehiclesrdquo InternationalJournal of Aerospace Engineering vol 2014 Article ID 74894013 pages 2014
[12] M-S Huang R M Narayanan Y Zhang and A FeinbergldquoTracking of noncooperative airborne targets using ADS-Bsignal and radar sensingrdquo International Journal of AerospaceEngineering vol 2013 Article ID 521630 12 pages 2013
[13] L Forlenza G Fasano D Accardo and A Moccia ldquoFlightperformance analysis of an image processing algorithm forintegrated sense-and-avoid systemsrdquo International Journal ofAerospace Engineering vol 2012 Article ID 542165 8 pages2012
[14] R Kroes Precise relative positioning of formation flying space-craft using GPS [PhD thesis] Delft University of TechnologyDelft The Netherlands 2006
[15] S-C Wu and Y E Bar-Sever ldquoReal-time sub-cm differentialorbit determination of two low-earth orbiters with GPS biasfixingrdquo inProceedings of the 19th International TechnicalMeetingof the Satellite Division of the Institution of Navigation (IONGNSS rsquo06) pp 2515ndash2522 Fort Worth Tex USA 2006
[16] S T Goh O Abdelkhalik and S A Zekavat ldquoImplementationof a differential geometric filter for spacecraft formation orbitestimationrdquo International Journal of Aerospace Engineering vol2012 Article ID 910496 13 pages 2012
[17] U Tancredi A Renga and M Grassi ldquoReal-time relative posi-tioning of spacecraft over long baselinesrdquo Journal of GuidanceControl and Dynamics vol 37 no 1 pp 47ndash58 2014
[18] T Richert and N El-Sheimy ldquoIonospheric modelingThe key toGNSS ambiguity resolutionrdquo GPS World pp 35ndash40 2005
[19] O Montenbruck M Wermuth and R Kahle ldquoGPS basedrelative navigation for the TanDEM-X missionmdashfirst flightresultsrdquo Navigation Journal of the Institute of Navigation vol58 no 4 pp 293ndash304 2011-2012
[20] B Li S Verhagen and P J G Teunissen ldquoRobustness of GNSSinteger ambiguity resolution in the presence of atmosphericbiasesrdquo GPS Solutions vol 18 no 2 pp 283ndash296 2014
[21] J Farrel andM BarthTheGlobal Positioning Systemand InertialNavigation chapter 5 McGraw-Hill New York NY USA 1999
[22] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications B W Parkinson and J J Spilker Edsvol 2 pp 559ndash592 American Institute of Aeronautics andAstronautics Washington DC USA 1996
[23] W G Melbourne ldquoThe case for ranging in GPS-based geodeticsystemsrdquo in Proceedings of the 1st Intenational Symposium onPrecise Positioning with the Global Positioning System pp 373ndash386 Ockville Md USA 1985
[24] G Wubbena ldquoSoftware developments for geodetic positioningwith GPS using TI 4100 code and carrier measurementsrdquoin Proceedings of the 1st Intenational Symposium on Precisepositioning with the Global Positioning System pp 403ndash412Rockville Md USA 1985
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of