Research Article Firing Control Optimization of Impulse...
12
Research Article Firing Control Optimization of Impulse Thrusters for Trajectory Correction Projectiles Min Gao, Yongwei Zhang, and Suochang Yang Electronic Engineering Department, Shijiazhuang Mechanical Engineering College, No. 97 Heping West Road, Shijiazhuang, Hebei 050003, China Correspondence should be addressed to Yongwei Zhang; [email protected] Received 12 February 2015; Revised 7 April 2015; Accepted 13 April 2015 Academic Editor: Paul Williams Copyright © 2015 Min Gao et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. is paper presents an optimum control scheme of firing time and firing phase angle by taking impact point deviation as optimum objective function which takes account of the difference of longitudinal and horizontal correction efficiency, firing delay, roll rate, flight stability, and so forth. Simulations indicate that this control scheme can assure lateral impulse thrusters are activated at time and phase angle when the correction efficiency is higher. Further simulations show that the impact point dispersion is mainly influenced by the total impulse deployed, and the impulse, number, and firing interval need to be optimized to reduce the impact point dispersion of rockets. Live firing experiments with two trajectory correction rockets indicate that the firing control scheme works effectively. 1. Introduction Dispersion characteristics of the trajectory correction pro- jectiles can be dramatically improved by outfitting with a suitable trajectory correction flight control system. e commonly used executive organs are moveable canards [1– 3], fixed canards [4, 5], synthetic jets [6], drag brakes [7, 8], and impulse thrusters [9–21]. e work reported here describes the implementation of a flight control system with impulse thrusters on a repre- sentative 122 mm artillery rocket. e flight control consists of a finite number of impulse thrusters mounted forward on the rocket body, computes position and velocity errors through comparing the position and velocity measured by GPS with prespecified (reference) trajectory, fires thrusters to change velocity direction, and assists the rocket to follow a prespecified trajectory. Research and development on the use of impulse thru- sters in order to improve the precision of projectiles has been going on for decades. Brandeis and Gill [9] have studied the effect of the impulse thruster on the forces and moments and investigated the impact of size and location of planar surfaces on the amplification of the impulse thruster. Burchett et al. [10] developed a simple set of formulae for the swerve motion of a dual-spin projectile under the action of lateral pulse jets and pointed out that the ability of lateral pulse jets to change the impact point steadily decreases with range to the target. Corriveau et al. [11] described a novel method for correcting the trajectory of spin- and fin-stabilized projectiles using pairs of impulse thrusters located away from the center of mass; they used the linear theory of ballistics to develop an analytical model representing the motion of a projectile subjected to impulse thrusters. e thrusters’ application on rockets has been originally considered by Harkins and Brown [12]. ey have proposed a method using a set of impulse thrusters to marginalize the off-axis angular rates of the rockets just aſter exiting the launcher and managed to reduce the impact point dispersion by the factor of 4. Jitpraphai and Costello [13] have proposed a simplified control system with impulse thrusters and demonstrated that impact point dispersion of a direct fire rocket could be drastically reduced. Burchett and Costello [14] have investigated the use of a small number of short- duration lateral pulses acting as a control mechanism to reduce the dispersion of a direct fire rocket and studied the effect of the number and amplitude of individual pulse jets. Gupta et al. [15] have explored the feasibility of reducing the impact point dispersion of a routinely used artillery rocket Hindawi Publishing Corporation International Journal of Aerospace Engineering Volume 2015, Article ID 781472, 11 pages http://dx.doi.org/10.1155/2015/781472
Transcript of Research Article Firing Control Optimization of Impulse...

Research ArticleFiring Control Optimization of Impulse Thrusters forTrajectory Correction Projectiles
Min Gao Yongwei Zhang and Suochang Yang
Electronic Engineering Department Shijiazhuang Mechanical Engineering College No 97 Heping West RoadShijiazhuang Hebei 050003 China
Correspondence should be addressed to Yongwei Zhang yongwei1112sinacom
Received 12 February 2015 Revised 7 April 2015 Accepted 13 April 2015
Academic Editor Paul Williams
Copyright copy 2015 Min Gao et alThis is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper presents an optimum control scheme of firing time and firing phase angle by taking impact point deviation as optimumobjective function which takes account of the difference of longitudinal and horizontal correction efficiency firing delay roll rateflight stability and so forth Simulations indicate that this control scheme can assure lateral impulse thrusters are activated at timeand phase angle when the correction efficiency is higher Further simulations show that the impact point dispersion is mainlyinfluenced by the total impulse deployed and the impulse number and firing interval need to be optimized to reduce the impactpoint dispersion of rockets Live firing experiments with two trajectory correction rockets indicate that the firing control schemeworks effectively
1 Introduction
Dispersion characteristics of the trajectory correction pro-jectiles can be dramatically improved by outfitting witha suitable trajectory correction flight control system Thecommonly used executive organs are moveable canards [1ndash3] fixed canards [4 5] synthetic jets [6] drag brakes [7 8]and impulse thrusters [9ndash21]
The work reported here describes the implementation ofa flight control system with impulse thrusters on a repre-sentative 122mm artillery rocket The flight control consistsof a finite number of impulse thrusters mounted forwardon the rocket body computes position and velocity errorsthrough comparing the position and velocity measured byGPS with prespecified (reference) trajectory fires thrusters tochange velocity direction and assists the rocket to follow aprespecified trajectory
Research and development on the use of impulse thru-sters in order to improve the precision of projectiles has beengoing on for decades Brandeis and Gill [9] have studied theeffect of the impulse thruster on the forces and momentsand investigated the impact of size and location of planarsurfaces on the amplification of the impulse thruster Burchettet al [10] developed a simple set of formulae for the swerve
motion of a dual-spin projectile under the action of lateralpulse jets and pointed out that the ability of lateral pulse jetsto change the impact point steadily decreases with range tothe target Corriveau et al [11] described a novel method forcorrecting the trajectory of spin- and fin-stabilized projectilesusing pairs of impulse thrusters located away from the centerof mass they used the linear theory of ballistics to developan analytical model representing the motion of a projectilesubjected to impulse thrusters
The thrustersrsquo application on rockets has been originallyconsidered by Harkins and Brown [12] They have proposeda method using a set of impulse thrusters to marginalizethe off-axis angular rates of the rockets just after exitingthe launcher and managed to reduce the impact pointdispersion by the factor of 4 Jitpraphai and Costello [13] haveproposed a simplified control system with impulse thrustersand demonstrated that impact point dispersion of a direct firerocket could be drastically reduced Burchett and Costello[14] have investigated the use of a small number of short-duration lateral pulses acting as a control mechanism toreduce the dispersion of a direct fire rocket and studied theeffect of the number and amplitude of individual pulse jetsGupta et al [15] have explored the feasibility of reducing theimpact point dispersion of a routinely used artillery rocket
Hindawi Publishing CorporationInternational Journal of Aerospace EngineeringVolume 2015 Article ID 781472 11 pageshttpdxdoiorg1011552015781472
2 International Journal of Aerospace Engineering
Center of mass
Impulse thrustersl
(a) Layout of thrusters
T
y4
x4
180∘
270∘
120579
(b) Lateral force
Figure 1 Schematic of layout and lateral force of thrusters
using lateral pulsejets coupled to a trajectory correction flightcontrol system Pavkovic et al [16] have presented a newtwo-phase guidance scheme named trajectory tracking withpulse-frequency modulation which is presented consider-ing the fact that an artillery rocket flies through differentatmospheric environments the presented guidance schemeachieves excellent accuracy even in the case of a small numberof pulse jets Recently Pavkovic et al [17] have presenteda simplified control scheme for artillery rockets named theactive damping method which performs a correction ofdisturbances immediately after a rocket exits a launcher tubeIt is shown that the application of such a control systemachieves a significant dispersion reduction
Each impulse thruster imparts a single short-durationlarge force to the rocket in the plane normal to the rocket axisof symmetry the control scheme of impulse thrusters mainlyinvolves two aspects the firing time and the firing phaseangle Many researchers [13ndash15] compute firing phase angleby the phase angle of trajectory deviation theoretical analysisshows that thismethodmay not get the best trajectory correc-tion performance under some conditions and the inducedeffects of rocket flight time on trajectory performance arenot considered Yang et al [18] converts the problem ofdetermining control parameters of the pulsejets into thedesign of the experiment with multifactor and multilevelIntroducing the firing time as a controllable factor therelationship model among firing time number of pulsejetsand total value of trajectory correction was obtained by usingregression analysis This scheme can determine the firingtime and number of pulsejets needed quickly and reduce thetrajectory error of the rocket effectively but the differenceof longitudinal and horizontal correction efficiency is notconsidered Cao et al [19] present an optimization strategyfor the firing phase angle which makes the total numberof thrusters minimized for the residual trajectory deviationafter previous correction However the foremost goal oftrajectory correction is to decrease the trajectory error theconsumption number of thrusters should be taken as thesecondary factor
In this paper to reduce the impact point dispersion of thetrajectory correction rocket using impulse thrusters a 6-DOFtrajectory model with lateral force is established and then
the control algorithm of firing time and firing phase angleis put forward taking impact point deviation as optimumobjective function
2 6-DOF Trajectory Model with Lateral Force
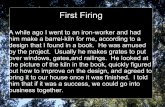
Thenumerical simulation is based on a rigid body six degreesof freedommodel typically utilized in flight dynamic analysisof rockets Figure 1 shows the rocket configuration with animpulse thruster ringmounted on the forward part of rocketsThe thrusters are assumed to be located at 119897 from the centerof mass The 6-DOF trajectory model with lateral force canbe established by taking the lateral force and its moment intothe ballistic motion equations
The lateral force in quasibody reference frame can bedescribed as
[[[
[
1198791199094
1198791199104
1198791199114
]]]
]
=[[
[
0
119879 cos 120579119879 sin 120579
]]
]
(1)
In (1)119879 is the lateral force of an impulse thruster in quasibodyreference frame and 120579 is the phase angle of lateral force
Transforming the lateral force from the quasi body to theaeroballistic reference frame we have
[[[
[
1198791199092
1198791199102
1198791199112
]]]
]
=[[
[
cos120572 cos120573 minus sin120572 cos120573 sin120573
sin120572 cos120572 0
minus cos120572 sin120573 sin120572 sin120573 cos120573
]]
]
[[
[
0
119879 cos 120579119879 sin 120579
]]
]
(2)
In (2) 120572 is the angle of attack of the rocket and 120573 is its sideslipangle
International Journal of Aerospace Engineering 3
The translational kinetic differential equations of therocket in aero-ballistic reference frame are given in
119889119881
119889119905= 1198751199092
+ 1198651199092
+ 1198791199092
1198811198891205791015840
119889119905= 1198751199102
+ 1198651199102
+ 1198791199102
minus119881 cos 1205791015840119889120595V
119889119905= 1198751199112
+ 1198651199112
+ 1198791199112
(3)
The applied loads appearing in (3) consist of main rocketthrust (119875) lateral thruster force (119879) and other forces (119865) com-ponents119881 1205791015840 and120595V are the velocity trajectory incline angleand flight path azimuth angle of the rocket respectively
Lateral moment of an impulse thruster in quasibodyreference frame is given by
[[[
[
1198721198791199094
1198721198791199104
1198721198791199114
]]]
]
=[[[
[
0
minus1198791199114
119897
1198791199104
119897
]]]
]
(4)
The rotational kinetic differential equations of the rocket inquasibody reference frame are given by
[[[[[[[[
[
1198691199094
1198891205961199094
119889119905
1198691199104
1198891205961199104
119889119905
1198691199114
1198891205961199114
119889119905
]]]]]]]]
]
=[[[
[
1198721199094
+ 1198721198791199094
1198721199104
+ 1198721198791199104
1198721199114
+ 1198721198791199114
]]]
]
minus[[[
[
0
(1198691199094
minus 1198691199114
) 1205961199094
1205961199114
(1198691199104
minus 1198691199094
) 1205961199094
1205961199104
]]]
]
+
[[[[[
[
0
minus1198691199114
1205961199114
119889120574
119889119905
1198691199104
1205961199104
119889120574
119889119905
]]]]]
]
(5)
The applied moments appearing in (5) contain contributionsfrom lateral thruster forces denoted by119872
119879 and other forces
denoted by119872 120574 is the Euler roll angle of the rocket1199081199094
1199081199104
1199081199114
are components of the angular rate vector 1198691199094
1198691199104
1198691199114
arecomponents of the transverse moment of inertia
Othermotion equations of the rocket not involving lateralforces or lateral moments can be obtained in [21]
3 The Establishing of OptimumObjective Function
Figure 2 shows trajectory correction progress of an impulsethruster Assuming that119872 is the target and119874 is the predictedimpact point computed by flight control system the distancebetween the predicted impact point and the target is119874119872 andthe longitudinal and horizontal deviations are Δ119871 and Δ119867respectively Assuming that the longitudinal and horizontalcorrection distance of an impulse thruster is 119875
119909and 119875
119911
respectively if the impulse thruster is activated the predictedimpact point of the rocket will be changed to 119860 then the
O
Z
X
M
A
Px
Pz
ΔL
ΔH
Figure 2 Schematic of trajectory correction
distance between the predicted impact point and the targetwill be reduced to be 119860119872 upon the impact of an impulsethruster
Because the aim of trajectory correction is to reduce theimpact point deviation it is foremost to make best use of theenergy of impulse thrusters to obtain the minimum impactpoint deviationTherefore the remaining impact point devia-tion after an impulse thruster was activated namely119860119872 andis taken as the optimization objective function in this paperIt is assumed that the positive direction of Δ119871 and 119875
119909is the
same and the positive direction of Δ119867 and 119875119911is the same
and then 119860119872 can be described by
119860119872 = [(Δ119871 + 119875119909)2
+ (Δ119867 + 119875119911)2
]12
(6)
In (6) Δ119871 and Δ119867 are the longitudinal and horizontalpredicted deviation computed by the flight control systemand remain constant during a short time so the change of119860119872 mainly relates to 119875
119909and 119875
119911of the impulse thruster
activated 119875119909and 119875
119911depend on roll rate of the rocket
impulse firing time and firing angle phase of the thrusterindividual thruster impulse and roll rate of the rocket havebeen determined in the design phase of trajectory correctionrockets therefore the firing time and firing phase angle aretaken as optimization variables of the objective function inthe flight phase
4 Optimization of Firing Phase Angle
The optimization variables firing time and firing phase angleare relatively independent and assumed that the firing timeof an impulse thruster has been identified then the firingphase angle is the only optimization variable of an impulsethruster To analyze the impact of firing phase angle on thetrajectory correction performance the lateral force is seenas a constant because the thrusters are active over a very
4 International Journal of Aerospace Engineering
O
Z
X
M
120572
A1
A2
ΔL
ΔH
(a) With equal converting coefficients
O
Z
X
M
ΔL
ΔH
120572
A2
A1
(b) With unequal converting coefficients
Figure 3 Trajectory correction performance with equal and unequal converting coefficients
short duration of time and 120579 denotes the phase angle oflateral force in quasibody reference frame To get the besttrajectory correction performance the best phase angle oflateral force leads to the minimum value of 119860119872 is denotedby 120579119898 and should be computed firstly The conventional
method to compute 120579 is by making its value equal to phaseangle of trajectory deviation denoted by 120572 referencing toFigure 3(a) However whether or not this method can getthe best trajectory correction performance depends on thelongitudinal and horizontal correction efficiency (namely asconverting coefficient) of the impulse thrusters
Given that the correction distance of an impulse thrusteris proportional to the thruster impulse 119875
119909and 119875
119911can be
described by
119875119909= 119896119909sdot cos 120579
119875119911= 119896119911sdot sin 120579
(7)
In (7) 119868 is the impulse of a thruster 119896119909and 119896
119911are longi-
tudinal and horizontal converting coefficients of an impulsethruster for the rocket The converting coefficients reflectthe correction efficiency of the impulse thruster The impactof correction efficiency on the objective function will beanalyzed under two conditions
(1) When 119896119909= 119896119911 longitudinal and horizontal correction
efficiency of an impulse thruster is the same and assumed that119874 is the predicted impact point of the rocket then possibleimpact points after correction of an impulse thruster forma circle around 119874 Assuming that the correction distancesare 119874119860
1and 119874119860
2 corresponding to 120579 = 120572 and 120579 = 120572
then 1198741198601
= 1198741198602 and 119874119860
1has the same direction with
119874119872 referring to Figure 3(a) The following equation can beobtained according to triangle trilateral theorem
1198741198601+ 1198601119872 lt 119874119860
2+ 1198602119872 (8)
Because 1198741198601
= 1198741198602 1198601119872 lt 119860
2119872 Therefore when 119896
119909=
119896119911 objective function 119860119872 can get the minimum value with
120579 = 120572(2)When 119896
119909= 119896119911 longitudinal and horizontal correction
efficiency of an impulse thruster is different whether or not1198741198601= 119874119860
2is not certain and referring to Figure 3(b)119860
1119872
may be bigger than1198602119872 so objective function cannot always
get the minimum value with 120579 = 120572 Under this condition anew method is required to compute 120579
119898
In fact 119896119909
= 119896119911in most of the flight time as shown in
Figure 6 a newmethod to compute best phase angle of lateralforce is proposed in this paper Because an analytic solutionis not acquired by (6) 120579
119898is solved by the binary iteration
method given in Figure 4 where [1205791 1205792] is the solution limits
and 119873 is the number of iterationsTo reduce the number of iterations and improve the
solution accuracy solution limits can be acquired by (9)The solution accuracy can reach 01 deg with 119873 = 10 so
120579119898can be solved quickly by this methodThe firing phase angle denoted by Φ
119888 is the phase angle
of the impulse thruster in quasibody reference frame whenit gets the firing signal from the flight control system Firingtime delay and impulse duration time should be taken intoaccount tomake sure the average angle of lateral force is equalto 120579119898
[1205791 1205792] =
[0∘
90∘
] Δ119867 lt 0 Δ119871 lt 0
[90∘
180∘
] Δ119867 lt 0 Δ119871 gt 0
[180∘
270∘
] Δ119867 gt 0 Δ119871 gt 0
[270∘
360∘
] Δ119867 gt 0 Δ119871 lt 0
(9)
Schematic of firing phase angle is given in Figure 5 Therelation between firing phase angle Φ
119888and 120579119898is given by
Φ119888= 120579119898
+ 120587 minus 120596 (120591119889+ 120591) (10)
International Journal of Aerospace Engineering 5
[1205791 1205792]i = 1
i lt N120579m = (1205791 + 1205792)2
End
i++
AM(1205791) lt AM(1205792)1205792 = 1205792
1205791 = (1205791 + 1205792)2
1205791 = 12057911205792 = (1205791 + 1205792)2
No
No
Yes
Yes
Figure 4 Solution flow of 120579119898
y4
z4Φc
180∘
270∘
120579m
120591
w
120591d
T
Figure 5 Schematic of firing phase angle
In (10) 120591119889is the firing delay and 120591 is a half of the impulse
duration 120596 is the roll angular rate of rocketWhen the phase angle Φ of the impulse thruster that will
be activated is equal to the firing phase angle the impulsethruster can be activated the condition to activate an impulsethruster is
1003816100381610038161003816Φ minus Φ119888
1003816100381610038161003816 le 120576 (11)
In (11) 120576 is the desired activation threshold
5 Optimization of Firing Time
After the optimization of firing phase angle the otheroptimization variable of objective function is the firing time
of thrustersThe general firing time control algorithmhas twostrategies
(1) Time elapsed from the previous impulse thruster firingmust be longer than a specified time duration Δ119905fire
119905 minus 119905lowast
gt Δ119905fire (12)
In (12) 119905lowast is the firing time of the previous impulse thruster(2) If predicted impact point deviation is greater than a
specified distance activate the thruster as soon as possibleΔ119905fire is an important design parameter of thrusters If
it is set too low the rocket does not have sufficient timeto respond and too many thrusters will be fired tending toovercompensate for trajectory deviation Simultaneously alower Δ119905fire may have an impact on the flight stability of therocket On the other hand if it is set too high only a smallnumber of thrusters can possibly be fired and the capabilitiesof the residual impulse thrusters will be wasted
The impact of flight time on trajectory correction perfor-mance of thrusters is not considered by strategy (2) whichmay lead to the thrusters being activated at the time whenthe correction efficiency is lower Gao and Zhang [20] gavethe conclusion that the longitudinal correction efficiencyof thrusters is lower in ballistic ascending segment of therocket and longitudinal and horizontal correction efficiencyreduces with the decrease of time to go in ballistic descendingsegment Simulation results of converting coefficients of arocket are shown in Figure 6 the launch angle of the rocketis 45 deg and the impact angle is minus64 deg
As shown in Figure 6 119896119909and 119896
119911have different change
trends and 119896119909increases gradually in ballistic ascending
segment and decreases gradually in ballistic descendingsegment while the 119896
119911decreases gradually with the decrease
of time to goThe behavior of 119896119909and 119896119911has a physical reason
According to the kinetic energy theorem the rocket willget a velocity increment Δ119881 when an impulse thruster wasactivated the direction of Δ119881 is nearly perpendicular to thevelocity direction of rocket When an impulse thruster wasactivated for longitudinal correctionΔ119881 can be decomposedinto Δ119881
119909and Δ119881
119911 as shown in Figure 7 supposing that the
lateral force of the impulse thruster is upward then Δ119881119910
=
Δ119881 cos(1205791015840) andΔ119881119909= minusΔ119881 sin(1205791015840) where 1205791015840 denotes the tra-
jectory incline angle In ballistic ascending segment 1205791015840 gt 0so Δ119881
119909lt 0 which will shorten the rocket range while Δ119881
119910gt
0 which will extend the rocket range the impact of Δ119881119909
and Δ119881119910is contradictory and therefore the impact of Δ119881 is
relatively small at the beginning of ballistic descending seg-ment As the trajectory inclination angle ranges from 45 degto 0 deg the absolute value of Δ119881
119910increases gradually while
the absolute value of Δ119881119909decreases gradually as a result the
longitudinal correction distance of a thruster increases grad-ually in ballistic ascending segment In ballistic descendingsegment trajectory inclination angle ranges from 0 deg tominus64 deg so Δ119881
119909gt 0 which will extend the rocket range and
Δ119881119910
gt 0 which will also extend the rocket range the longi-tudinal correction distance is mainly influenced by the timeto go therefore longitudinal correction distance of a thrusterdecreases gradually with the decrease of time to go in ballisticdescending segment In the horizontal plane Δ119881
119911asymp Δ119881
6 International Journal of Aerospace Engineering
16
14
12
10
08
06
04
02
00
0 10 20 30 40 50 60 70 80 90
t (s)
Con
vert
ing
coeffi
cien
ts
Kz
Kx
Figure 6 Converting coefficients versus flight time
ΔV VΔVy
ΔVx
V
ΔVy
ΔVx
ΔV
x
y
o
120579998400
Figure 7 Schematic of velocity increment of a thruster
the horizontal correction distance is mainly influenced bythe time to go and hence the horizontal correction distancedecreases gradually with the decrease of time to goTherefore119896119909and 119896119911have the change trends shown in Figure 6
It can be known from (6) and Figure 6 that the value ofthe objective function (activated at the optimized firing phaseangle) tends to increase in ballistic descending segmentSupposing that 119905
119896is the time of ballistic vertex the value of
the objective function at 119905119896can be taken as a reference value
denoted by119860119872(119905119896) In ballistic ascending segment thrusters
can be activated if the value of the objective function is lessthan the reference value119860119872(119905
119896) otherwise they cannotThis
method can guarantee that thrusters are activated at the timewhen correction efficiency is higher especially in the ballisticascending segment
To sum up the firing time control algorithm can beimproved as the following equation
119905 minus 119905lowast
gt Δ119905fire
119860119872 (119905) lt 119860119872(119905119896) 119905 lt 119905
119896
119860119872 (119905) lt 119874119872(119905) 119905 ge 119905119896
(13)
In (13) 119905119896is the time of ballistic vertex
6 Results and Discussion
To investigate the correction performance of impulse thru-sters and verify the effectiveness of the firing control schemesome simulations of a rocket have been done by numericalintegration of the equations described above using a fourth-order Runge-Kutta algorithmThe rocket configuration usedin the simulation study is a representative 122mm artilleryrocket 299m long fin-stabilized with four pop-out fins onits rear part The main rocket motor burns for 255 s andimparts an impulse of 54247N-s to the rocket During themain rocket motor burns the forward velocity of the rocketis increased from 469ms to 9357ms The rocket weightmass center location from the nose tip roll inertia andpitch inertia before and after burn is 661430 kg 143121m016012 kg-m2 and 48423636 kg-m2 respectively Therocket is launched at sea level toward a target on the groundwith altitude and cross range equal to zero at a range of28000m The thruster ring is assumed to be located at0869m from the nose tip of the rocket and contains 50individual thrusters where each individual thruster impartsan impulse of 15N-s on the rocket body over a time durationof 002 sTheminimum firing interval of thrusters Δ119905fire is setto 02 s The desired activation threshold 120576 is set to 3 deg
The time-varying data of uncontrolled and controlledtrajectories with optimum firing control scheme against anominal command trajectory for the example rocket arecompared in Figure 8
Figure 8(a) plots the total number of thrusters fired versustime Five thrusters are fired in 10sim15 s and 43 thrustersare fired in 45sim70 s No thrusters are fired in 15sim45 s whichindicates that the correction efficiency is relatively low duringthis period No thrusters are fired after 70 s because thepredicted impact point deviation is too small to implementany trajectory correction The activation of thrusters willarouse the increase of attack angle of rocket as shown inFigure 8(b)
It can be known from Figures 8(c) and 8(d) that thepredicted longitudinal and horizontal impact point devia-tions reduce graduallyThe horizontal impact point deviationreduces quickly while longitudinal impact point deviationhas no significant change in 10sim20 s which indicates that thethrusters fired in this period are mainly used for horizontalcorrection corresponding to the fact that the horizontalcorrection efficiency of thrusters in this period is higher(119896119911is greater referencing to Figure 6) Both horizontal and
longitudinal impact point deviations reduce quickly in 45sim70 s which indicates that thrusters fired in this periodare used for both horizontal and longitudinal correctioncorresponding to the fact that the horizontal and longitudinalcorrection efficiency in this period is similar (119896
119909asymp 119896119911)
Figures 8(e) and 8(f) show that the trajectory correctionrocket flights to target point gradually under the effect ofthrusters The final impact point deviation of the rocket wasreduced from horizontal 3413m and longitudinal 4833m inthe uncontrolled case to horizontal 109m and longitudinal159m in the controlled case which demonstrates that thefiring control scheme works effectively
International Journal of Aerospace Engineering 7
60
50
40
30
20
10
0
minus100 20 40 60 80 100
Num
ber o
f im
pulse
thru
sters
fire
d
t (s)
(a) Total number of thrusters tired versus time
0 20 40 60 80 100
t (s)
Tota
l atta
ck an
gle (
deg)
16
14
12
10
08
06
04
02
00
minus02
(b) Total attack angle versus time
0 20 40 60 80 100
t (s)
500
400
300
200
100
0
minus100
minus200
Hor
izon
tal i
mpa
ct p
oint
dev
iatio
n (m
)
(c) Horizontal impact point deviation versus time
0 20 40 60 80 100
t (s)
Long
itudi
nal i
mpa
ct p
oint
dev
iatio
n (m
)600
400
200
0
(d) Longitudinal impact point deviation versus time
UncontrolledControlled
350
300
250
200
150
100
50
0
z(m
)
x (km)0 5 10 15 20 25 30
Target
+
(e) Cross range versus range
y(k
m)
x (km)0 5 10 15 20 25 30
Target
10
8
6
4
2
0
UncontrolledControlled
+
(f) Attitude versus range
Figure 8 Correction performance of the optimum firing control scheme
8 International Journal of Aerospace Engineering
600
400
200
0
minus200
minus400
minus600
minus1500 minus1000 minus500 0 500 1000 1500
Rang
e miss
(m)
Cross-range miss (m)
CEP = 359m
(a) Impact point distribution of uncontrolled rockets
Cross-range miss (m)
400
300
200
100
0
minus100
minus200
minus300minus100 0 100 200 300
Rang
e miss
(m)
CEP = 38m
(b) Impact point distribution of rockets with general firing controlscheme
Cross-range miss (m)
Rang
e miss
(m)
CEP = 20m300
200
100
0
minus100
minus200
minus300
minus50 0 50 100 150 200 250 300
(c) Impact point distribution of rockets with the optimum firingcontrol scheme
Figure 9 Impact point distribution
Figure 9 shows the impact point distribution using theMonte Carlo method The cases of the uncontrolled rocketsas well as of the rockets with general firing control schemeand optimum firing control scheme are shown The analysiswas performed for a statistical sample of 1024 simulationsAll initial conditions were modeled as Gaussian randomvariables with mean values and standard deviations givenin Table 1 Wind direction is a uniform random variablebetween 0 and 2120587 The nominal launching elevation angle is4231 deg but the mean value of launching elevation angleis set as 4251 deg a launching elevation angle error about02 deg and a launching azimuth angle error about 01 degwere introduced to simulate the accuracy errors of rockets
The result of Monte Carlo simulations is shown inFigure 9 for uncontrolled rockets the max value of rangemiss is 5892m while the min value of range miss is minus4219the mean value of range miss is 955 the max value of crossrange miss is 13498 while the min value of cross range
Table 1 Initial conditions and disturbances
Parameter Unit Mean value Standard deviationLaunching elevationangle deg 4251 02
Launching azimuthangle deg 01 02
Impulse of the mainrocket motor 100 01
Wind ms 0 2
miss is minus10636 the mean value of cross range miss is 438there are more points in the first quadrant (right upper side)of the plane coordinate system as shown in Figure 9(a)and the CEP of uncontrolled rockets is 359m Impact pointdistribution of the trajectory correction rockets reducesgreatly as shown in Figures 9(b) and 9(c) The rockets with
International Journal of Aerospace Engineering 9
400
350
300
250
200
150
100
50
0
0 10 20 30 40 50
Number of impulse thrusters
CEP
(m)
30N-s20N-s10N-s
(a) CEP versus number of thrusters and individual thruster impulse
400
350
300
250
200
150
100
50
0
CEP
(m)
0 200 400 600 800 1000
Total impulse (N-s)
30N-s20N-s10N-s
(b) CEP versus total impulse of thrusters and individual thrusterimpulse
9
8
7
6
5
4
3
2
1
5 10 15 20 25 30
Max
imal
tota
l atta
ck an
gle (
deg)
Individual thruster impulse (N-s)
100ms200ms300ms
(c) Maximal total attack angle versus individual thruster impulse andminimum firing interval
Figure 10 The impact of parameters of thrusters on CEP and flight stability of rockets
the general firing control scheme have a CEP of 38m whilethe CEP of rockets with the optimum firing control schemeis 20m The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of impact pointdispersion of rockets and the reduction of thruster consump-tion testify the effectiveness of firing control optimization
Figure 10 shows the impact of thruster parameters onthe CEP and flight stability of rockets Figure 10(a) shows
the relation between CEP of rockets number of thrustersmounted on rocket and individual thruster impulse It canbe known that the CEP of rockets is highly correlated withthe number of thrusters and individual thruster impulse andCEP reduces steadily as the number of thrusters or individualthruster impulse is increased
Figure 10(b) shows the relationship between CEP ofrockets individual thruster impulse and the total impulseof thrusters For a value of the total impulse as the individ-ual thruster impulse is increased the number of thrustersdecreases proportionally for the total impulse to remain as
10 International Journal of Aerospace Engineering
0 5 10 15 20 25 30
0
2
4
6
8
10
Nominal trajectoryTCR1TCR2
minus2
y(k
m)
x (km)
(a) Attitude versus range
0 5 10 15 20 25 30
0
50
100
Nominal trajectoryTCR1TCR2
x (km)
minus50
minus100
minus150
minus200
minus250
minus300
z(m
)(b) Cross range versus range
Figure 11 The trajectory of two TCRs
a constant As shown in Figure 10(b) the evolution of thethree curves is similar when the thruster impulse is smallthe number of thrusters is large and some thrusters willbe activated at time when the correction efficiency is lowerwhich is the unfavorable aspect for trajectory correctionhowever large thruster number means more correctionopportunity and the correction precision of a small thrusterimpulse is higher which is the favorable aspect for trajectorycorrection these two aspects are contradictory the combinedeffect of these two aspects leads to the similar evolution ofthe three curves The result indicates that CEP is mainlyinfluenced by the total impulse when the individual thrusterimpulse is reasonable CEP reduces gradually as the totalimpulse is increased and the value of individual thrusterimpulse has a small impact on CEP
Figure 10(c) shows the relationship between maximumtotal attack angle individual thruster impulse and theminimum firing interval (Δ119905fire) The results indicate thatindividual thruster impulse and minimum firing intervalhave a direct impact on the maximum total attack angleas individual thruster impulse increases or minimum firinginterval reduces the maximum total attack angle increaseswhich may affect the flight stability of trajectory correctionrockets
Based on the above discussion some suggestions are putforward to determine the thruster configuration parametersof trajectory correction rockets Firstly the total impulseshould be determined according to CEP needed because theimpact point dispersion is mainly influenced by the totalimpulse of lateral thrusters deployed Secondly individualthruster impulse should be determined according to the totalimpulse limits of layout space on the rocket flight stability ofrockets cost and so forth If the individual thruster impulseis too small there may be too many thrusters needed to bemounted on the rocket On the other hand if the individual
thruster impulse is too large the flight stability may deterio-rate Thirdly the minimum firing interval should be deter-mined according to the individual thruster impulse flightstability of rockets correction efficiency of thrusters and soforth If the individual thruster impulse is large a relativelylarge minimum firing interval should be set to guarantee theflight stability of rockets If the individual thruster impulse issmall a relatively small minimum firing interval time shouldbe set to insure thrusters can be activated at the segment oftrajectory while the correction efficiency is higher
Live experiments have been done to verify the effec-tiveness of the firing control scheme The characters of thetrajectory correction rockets (TCR) have been launched sameas the rocket described in simulations above Two TCRshave been launched toward a target on the ground withaltitude equal to 200m and cross range equal to zero at arange of 28000m the launching elevation angle was set to436 deg according to theweather of the time Figure 11 showsthe trajectory of two TCRs contrasted with the nominaltrajectory As shown in Figure 11(a) at the ballistic vertex theattitude of two TCRs is 300sim400m higher than the nominaltrajectory then the trajectory of two TCRs gradually closeto the nominal trajectory under the effect of flight controlsystem As shown in Figure 11(b) the cross range of thetwo TCRs gradually closes to the nominal trajectory underthe effect of flight control system The final impact pointdeviation of TCR1 is (45 212) and the final impact pointdeviation of TCR2 is (minus283 354) which demonstrates thefiring control scheme works effectively
7 Conclusion
This paper establishes the 6-DOF trajectorymodel of a rocketwith lateral force and presents an optimum control schemeof firing time and firing phase angle by taking impact point
International Journal of Aerospace Engineering 11
deviation as optimumobjective functionwhich takes accountof the difference of longitudinal and horizontal correctionefficiency firing delay roll rate flight stability and so forthThe result of Monte Carlo simulations shows that the uncon-trolled rockets have a CEP of 359m the CEPwas improved to38mwith the general firing control scheme as a contrast theCEP was improved to 20m with the optimum firing controlscheme The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of CEP and thereduction of thruster consumption testify the effectiveness offiring control optimization The variations of rocket impactpoint dispersion are analyzed with different impulse andnumber of impulse thrusters It is shown that the impactpoint dispersion is mainly influenced by the total impulseof impulse thrusters deployed and steadily decreases as thetotal impulse is increased The impulse number and firinginterval need to be optimized to insure the flight stabilityof rockets and impulse thrusters activated at time whenthe correction efficiency is higher Two trajectory correctionrockets have been launched to verify the effectiveness of thefiring control scheme the final impact point deviations of twotrajectory correction rockets are respectively (45 212) and(minus283 354) which demonstrates the firing control schemeworks effectively
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] M Costello ldquoExtended range of a gun launched smart projectileusing controllable canardsrdquo Shock and Vibration vol 8 no 3-4pp 203ndash213 2001
[2] J Rogers and M Costello ldquoDesign of a roll-stabilized mortarprojectile with reciprocating canardsrdquo Journal of GuidanceControl and Dynamics vol 33 no 4 pp 1026ndash1034 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofan asymmetric projectile with activating canardsrdquo Journal ofSpacecraft and Rockets vol 49 no 1 pp 130ndash135 2012
[4] M Costello and A Peterson ldquoLinear theory of a dual-spinprojectile in atmospheric flightrdquo Journal of Guidance Controland Dynamics vol 23 no 5 pp 789ndash797 2000
[5] A Elsaadany and Y Wen-Jun ldquoAccuracy improvement capa-bility of advanced projectile based on course correction fuzeconceptrdquo The Scientific World Journal vol 2014 Article ID273450 10 pages 2014
[6] M Amitay D R Smith V Kibens D E Parekh and A GlezerldquoAerodynamic flow control over an unconventional airfoil usingsynthetic jet actuatorsrdquoAIAA journal vol 39 no 3 pp 361ndash3702001
[7] M S L Hollis and F J Brandon ldquoRange correction module fora spin stabilized projectilerdquo US Patent Documents US-58165311998
[8] M S L Hollis and F J Brandon ldquoDesign and analysis of afuze-configurable range correction device for an artillery pro-jectilerdquo Report ARL-TR-2074 US Army Research LaboratoryAberdeen Proving Ground Aberdeen Md USA 1999
[9] J Brandeis and J Gill ldquoExperimental investigation of super- andhypersonic jet interaction on missile configurationsrdquo Journal ofSpacecraft and Rockets vol 35 no 3 pp 296ndash302 1998
[10] B Burchett A Peterson and M Costello ldquoPrediction ofswerving motion of a dual-spin projectile with lateral pulse jetsin atmospheric flightrdquo Mathematical and Computer Modellingvol 35 no 7-8 pp 821ndash834 2002
[11] D Corriveau P Wey and C Berner ldquoThrusters pairing guide-lines for trajectory corrections of projectilesrdquo Journal of Guid-ance Control and Dynamics vol 34 no 4 pp 1120ndash1128 2011
[12] T Harkins and T Brown ldquoUsing active damping as a precision-enhancing technology for 275-inch rocketsrdquo Tech Rep ARL-TR-1772 US Army Research Laboratory Aberdeen Md USA1999
[13] T Jitpraphai and M Costello ldquoDispersion reduction of a directfire rocket using lateral pulse jetsrdquo Journal of Spacecraft andRockets vol 38 no 6 pp 929ndash936 2001
[14] B Burchett and M Costello ldquoModel predictive lateral pulse jetcontrol of an atmospheric rocketrdquo Journal of Guidance Controland Dynamics vol 25 no 5 pp 860ndash867 2002
[15] S K Gupta S Saxena A Singhal and A K Ghosh ldquoTrajectorycorrection flight control system using pulsejet on an artilleryrocketrdquo Defence Science Journal vol 58 no 1 pp 15ndash33 2008
[16] B Pavkovic M Pavic and D Cuk ldquoFrequency-modulatedpulse-jet control of an artillery rocketrdquo Journal of Spacecraft andRockets vol 49 no 2 pp 286ndash294 2012
[17] B Pavkovic M Pavic and D Cuk ldquoEnhancing the precisionof artillery rockets using pulsejet control systems with activedampingrdquo Scientific Technical Review vol 62 no 2 pp 10ndash192012
[18] H-W Yang L-H Dou and M-G Gan ldquoControl method ofimpulse actuator of antiaircraft trajectory correction projectilerdquoTransaction of Beijing Institute of Technology vol 31 no 10 pp1184ndash1188 2011
[19] Y-J Cao S-X Yang and X-J Li ldquoResearch on firing phaseangle optimization of terminal trajectory correction projectilebased on pulse jet controlrdquo Acta Armamentarii vol 29 no 8pp 897ndash901 2008
[20] F Gao and H Zhang ldquoStudy of 2-D trajectory correction basedon geomagnetic detection with impulse force for projectilesrdquoJournal of System Simulation vol 23 no 1 pp 123ndash128 2011
[21] X Qian R Lin and Y Zhao Aerothermodynamics of MissileFlight Beijing Institute of Technology Press Beijing China2008
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Aerospace Engineering
Center of mass
Impulse thrustersl
(a) Layout of thrusters
T
y4
x4
180∘
270∘
120579
(b) Lateral force
Figure 1 Schematic of layout and lateral force of thrusters
using lateral pulsejets coupled to a trajectory correction flightcontrol system Pavkovic et al [16] have presented a newtwo-phase guidance scheme named trajectory tracking withpulse-frequency modulation which is presented consider-ing the fact that an artillery rocket flies through differentatmospheric environments the presented guidance schemeachieves excellent accuracy even in the case of a small numberof pulse jets Recently Pavkovic et al [17] have presenteda simplified control scheme for artillery rockets named theactive damping method which performs a correction ofdisturbances immediately after a rocket exits a launcher tubeIt is shown that the application of such a control systemachieves a significant dispersion reduction
Each impulse thruster imparts a single short-durationlarge force to the rocket in the plane normal to the rocket axisof symmetry the control scheme of impulse thrusters mainlyinvolves two aspects the firing time and the firing phaseangle Many researchers [13ndash15] compute firing phase angleby the phase angle of trajectory deviation theoretical analysisshows that thismethodmay not get the best trajectory correc-tion performance under some conditions and the inducedeffects of rocket flight time on trajectory performance arenot considered Yang et al [18] converts the problem ofdetermining control parameters of the pulsejets into thedesign of the experiment with multifactor and multilevelIntroducing the firing time as a controllable factor therelationship model among firing time number of pulsejetsand total value of trajectory correction was obtained by usingregression analysis This scheme can determine the firingtime and number of pulsejets needed quickly and reduce thetrajectory error of the rocket effectively but the differenceof longitudinal and horizontal correction efficiency is notconsidered Cao et al [19] present an optimization strategyfor the firing phase angle which makes the total numberof thrusters minimized for the residual trajectory deviationafter previous correction However the foremost goal oftrajectory correction is to decrease the trajectory error theconsumption number of thrusters should be taken as thesecondary factor
In this paper to reduce the impact point dispersion of thetrajectory correction rocket using impulse thrusters a 6-DOFtrajectory model with lateral force is established and then
the control algorithm of firing time and firing phase angleis put forward taking impact point deviation as optimumobjective function
2 6-DOF Trajectory Model with Lateral Force
Thenumerical simulation is based on a rigid body six degreesof freedommodel typically utilized in flight dynamic analysisof rockets Figure 1 shows the rocket configuration with animpulse thruster ringmounted on the forward part of rocketsThe thrusters are assumed to be located at 119897 from the centerof mass The 6-DOF trajectory model with lateral force canbe established by taking the lateral force and its moment intothe ballistic motion equations
The lateral force in quasibody reference frame can bedescribed as
[[[
[
1198791199094
1198791199104
1198791199114
]]]
]
=[[
[
0
119879 cos 120579119879 sin 120579
]]
]
(1)
In (1)119879 is the lateral force of an impulse thruster in quasibodyreference frame and 120579 is the phase angle of lateral force
Transforming the lateral force from the quasi body to theaeroballistic reference frame we have
[[[
[
1198791199092
1198791199102
1198791199112
]]]
]
=[[
[
cos120572 cos120573 minus sin120572 cos120573 sin120573
sin120572 cos120572 0
minus cos120572 sin120573 sin120572 sin120573 cos120573
]]
]
[[
[
0
119879 cos 120579119879 sin 120579
]]
]
(2)
In (2) 120572 is the angle of attack of the rocket and 120573 is its sideslipangle
International Journal of Aerospace Engineering 3
The translational kinetic differential equations of therocket in aero-ballistic reference frame are given in
119889119881
119889119905= 1198751199092
+ 1198651199092
+ 1198791199092
1198811198891205791015840
119889119905= 1198751199102
+ 1198651199102
+ 1198791199102
minus119881 cos 1205791015840119889120595V
119889119905= 1198751199112
+ 1198651199112
+ 1198791199112
(3)
The applied loads appearing in (3) consist of main rocketthrust (119875) lateral thruster force (119879) and other forces (119865) com-ponents119881 1205791015840 and120595V are the velocity trajectory incline angleand flight path azimuth angle of the rocket respectively
Lateral moment of an impulse thruster in quasibodyreference frame is given by
[[[
[
1198721198791199094
1198721198791199104
1198721198791199114
]]]
]
=[[[
[
0
minus1198791199114
119897
1198791199104
119897
]]]
]
(4)
The rotational kinetic differential equations of the rocket inquasibody reference frame are given by
[[[[[[[[
[
1198691199094
1198891205961199094
119889119905
1198691199104
1198891205961199104
119889119905
1198691199114
1198891205961199114
119889119905
]]]]]]]]
]
=[[[
[
1198721199094
+ 1198721198791199094
1198721199104
+ 1198721198791199104
1198721199114
+ 1198721198791199114
]]]
]
minus[[[
[
0
(1198691199094
minus 1198691199114
) 1205961199094
1205961199114
(1198691199104
minus 1198691199094
) 1205961199094
1205961199104
]]]
]
+
[[[[[
[
0
minus1198691199114
1205961199114
119889120574
119889119905
1198691199104
1205961199104
119889120574
119889119905
]]]]]
]
(5)
The applied moments appearing in (5) contain contributionsfrom lateral thruster forces denoted by119872
119879 and other forces
denoted by119872 120574 is the Euler roll angle of the rocket1199081199094
1199081199104
1199081199114
are components of the angular rate vector 1198691199094
1198691199104
1198691199114
arecomponents of the transverse moment of inertia
Othermotion equations of the rocket not involving lateralforces or lateral moments can be obtained in [21]
3 The Establishing of OptimumObjective Function
Figure 2 shows trajectory correction progress of an impulsethruster Assuming that119872 is the target and119874 is the predictedimpact point computed by flight control system the distancebetween the predicted impact point and the target is119874119872 andthe longitudinal and horizontal deviations are Δ119871 and Δ119867respectively Assuming that the longitudinal and horizontalcorrection distance of an impulse thruster is 119875
119909and 119875
119911
respectively if the impulse thruster is activated the predictedimpact point of the rocket will be changed to 119860 then the
O
Z
X
M
A
Px
Pz
ΔL
ΔH
Figure 2 Schematic of trajectory correction
distance between the predicted impact point and the targetwill be reduced to be 119860119872 upon the impact of an impulsethruster
Because the aim of trajectory correction is to reduce theimpact point deviation it is foremost to make best use of theenergy of impulse thrusters to obtain the minimum impactpoint deviationTherefore the remaining impact point devia-tion after an impulse thruster was activated namely119860119872 andis taken as the optimization objective function in this paperIt is assumed that the positive direction of Δ119871 and 119875
119909is the
same and the positive direction of Δ119867 and 119875119911is the same
and then 119860119872 can be described by
119860119872 = [(Δ119871 + 119875119909)2
+ (Δ119867 + 119875119911)2
]12
(6)
In (6) Δ119871 and Δ119867 are the longitudinal and horizontalpredicted deviation computed by the flight control systemand remain constant during a short time so the change of119860119872 mainly relates to 119875
119909and 119875
119911of the impulse thruster
activated 119875119909and 119875
119911depend on roll rate of the rocket
impulse firing time and firing angle phase of the thrusterindividual thruster impulse and roll rate of the rocket havebeen determined in the design phase of trajectory correctionrockets therefore the firing time and firing phase angle aretaken as optimization variables of the objective function inthe flight phase
4 Optimization of Firing Phase Angle
The optimization variables firing time and firing phase angleare relatively independent and assumed that the firing timeof an impulse thruster has been identified then the firingphase angle is the only optimization variable of an impulsethruster To analyze the impact of firing phase angle on thetrajectory correction performance the lateral force is seenas a constant because the thrusters are active over a very
4 International Journal of Aerospace Engineering
O
Z
X
M
120572
A1
A2
ΔL
ΔH
(a) With equal converting coefficients
O
Z
X
M
ΔL
ΔH
120572
A2
A1
(b) With unequal converting coefficients
Figure 3 Trajectory correction performance with equal and unequal converting coefficients
short duration of time and 120579 denotes the phase angle oflateral force in quasibody reference frame To get the besttrajectory correction performance the best phase angle oflateral force leads to the minimum value of 119860119872 is denotedby 120579119898 and should be computed firstly The conventional
method to compute 120579 is by making its value equal to phaseangle of trajectory deviation denoted by 120572 referencing toFigure 3(a) However whether or not this method can getthe best trajectory correction performance depends on thelongitudinal and horizontal correction efficiency (namely asconverting coefficient) of the impulse thrusters
Given that the correction distance of an impulse thrusteris proportional to the thruster impulse 119875
119909and 119875
119911can be
described by
119875119909= 119896119909sdot cos 120579
119875119911= 119896119911sdot sin 120579
(7)
In (7) 119868 is the impulse of a thruster 119896119909and 119896
119911are longi-
tudinal and horizontal converting coefficients of an impulsethruster for the rocket The converting coefficients reflectthe correction efficiency of the impulse thruster The impactof correction efficiency on the objective function will beanalyzed under two conditions
(1) When 119896119909= 119896119911 longitudinal and horizontal correction
efficiency of an impulse thruster is the same and assumed that119874 is the predicted impact point of the rocket then possibleimpact points after correction of an impulse thruster forma circle around 119874 Assuming that the correction distancesare 119874119860
1and 119874119860
2 corresponding to 120579 = 120572 and 120579 = 120572
then 1198741198601
= 1198741198602 and 119874119860
1has the same direction with
119874119872 referring to Figure 3(a) The following equation can beobtained according to triangle trilateral theorem
1198741198601+ 1198601119872 lt 119874119860
2+ 1198602119872 (8)
Because 1198741198601
= 1198741198602 1198601119872 lt 119860
2119872 Therefore when 119896
119909=
119896119911 objective function 119860119872 can get the minimum value with
120579 = 120572(2)When 119896
119909= 119896119911 longitudinal and horizontal correction
efficiency of an impulse thruster is different whether or not1198741198601= 119874119860
2is not certain and referring to Figure 3(b)119860
1119872
may be bigger than1198602119872 so objective function cannot always
get the minimum value with 120579 = 120572 Under this condition anew method is required to compute 120579
119898
In fact 119896119909
= 119896119911in most of the flight time as shown in
Figure 6 a newmethod to compute best phase angle of lateralforce is proposed in this paper Because an analytic solutionis not acquired by (6) 120579
119898is solved by the binary iteration
method given in Figure 4 where [1205791 1205792] is the solution limits
and 119873 is the number of iterationsTo reduce the number of iterations and improve the
solution accuracy solution limits can be acquired by (9)The solution accuracy can reach 01 deg with 119873 = 10 so
120579119898can be solved quickly by this methodThe firing phase angle denoted by Φ
119888 is the phase angle
of the impulse thruster in quasibody reference frame whenit gets the firing signal from the flight control system Firingtime delay and impulse duration time should be taken intoaccount tomake sure the average angle of lateral force is equalto 120579119898
[1205791 1205792] =
[0∘
90∘
] Δ119867 lt 0 Δ119871 lt 0
[90∘
180∘
] Δ119867 lt 0 Δ119871 gt 0
[180∘
270∘
] Δ119867 gt 0 Δ119871 gt 0
[270∘
360∘
] Δ119867 gt 0 Δ119871 lt 0
(9)
Schematic of firing phase angle is given in Figure 5 Therelation between firing phase angle Φ
119888and 120579119898is given by
Φ119888= 120579119898
+ 120587 minus 120596 (120591119889+ 120591) (10)
International Journal of Aerospace Engineering 5
[1205791 1205792]i = 1
i lt N120579m = (1205791 + 1205792)2
End
i++
AM(1205791) lt AM(1205792)1205792 = 1205792
1205791 = (1205791 + 1205792)2
1205791 = 12057911205792 = (1205791 + 1205792)2
No
No
Yes
Yes
Figure 4 Solution flow of 120579119898
y4
z4Φc
180∘
270∘
120579m
120591
w
120591d
T
Figure 5 Schematic of firing phase angle
In (10) 120591119889is the firing delay and 120591 is a half of the impulse
duration 120596 is the roll angular rate of rocketWhen the phase angle Φ of the impulse thruster that will
be activated is equal to the firing phase angle the impulsethruster can be activated the condition to activate an impulsethruster is
1003816100381610038161003816Φ minus Φ119888
1003816100381610038161003816 le 120576 (11)
In (11) 120576 is the desired activation threshold
5 Optimization of Firing Time
After the optimization of firing phase angle the otheroptimization variable of objective function is the firing time
of thrustersThe general firing time control algorithmhas twostrategies
(1) Time elapsed from the previous impulse thruster firingmust be longer than a specified time duration Δ119905fire
119905 minus 119905lowast
gt Δ119905fire (12)
In (12) 119905lowast is the firing time of the previous impulse thruster(2) If predicted impact point deviation is greater than a
specified distance activate the thruster as soon as possibleΔ119905fire is an important design parameter of thrusters If
it is set too low the rocket does not have sufficient timeto respond and too many thrusters will be fired tending toovercompensate for trajectory deviation Simultaneously alower Δ119905fire may have an impact on the flight stability of therocket On the other hand if it is set too high only a smallnumber of thrusters can possibly be fired and the capabilitiesof the residual impulse thrusters will be wasted
The impact of flight time on trajectory correction perfor-mance of thrusters is not considered by strategy (2) whichmay lead to the thrusters being activated at the time whenthe correction efficiency is lower Gao and Zhang [20] gavethe conclusion that the longitudinal correction efficiencyof thrusters is lower in ballistic ascending segment of therocket and longitudinal and horizontal correction efficiencyreduces with the decrease of time to go in ballistic descendingsegment Simulation results of converting coefficients of arocket are shown in Figure 6 the launch angle of the rocketis 45 deg and the impact angle is minus64 deg
As shown in Figure 6 119896119909and 119896
119911have different change
trends and 119896119909increases gradually in ballistic ascending
segment and decreases gradually in ballistic descendingsegment while the 119896
119911decreases gradually with the decrease
of time to goThe behavior of 119896119909and 119896119911has a physical reason
According to the kinetic energy theorem the rocket willget a velocity increment Δ119881 when an impulse thruster wasactivated the direction of Δ119881 is nearly perpendicular to thevelocity direction of rocket When an impulse thruster wasactivated for longitudinal correctionΔ119881 can be decomposedinto Δ119881
119909and Δ119881
119911 as shown in Figure 7 supposing that the
lateral force of the impulse thruster is upward then Δ119881119910
=
Δ119881 cos(1205791015840) andΔ119881119909= minusΔ119881 sin(1205791015840) where 1205791015840 denotes the tra-
jectory incline angle In ballistic ascending segment 1205791015840 gt 0so Δ119881
119909lt 0 which will shorten the rocket range while Δ119881
119910gt
0 which will extend the rocket range the impact of Δ119881119909
and Δ119881119910is contradictory and therefore the impact of Δ119881 is
relatively small at the beginning of ballistic descending seg-ment As the trajectory inclination angle ranges from 45 degto 0 deg the absolute value of Δ119881
119910increases gradually while
the absolute value of Δ119881119909decreases gradually as a result the
longitudinal correction distance of a thruster increases grad-ually in ballistic ascending segment In ballistic descendingsegment trajectory inclination angle ranges from 0 deg tominus64 deg so Δ119881
119909gt 0 which will extend the rocket range and
Δ119881119910
gt 0 which will also extend the rocket range the longi-tudinal correction distance is mainly influenced by the timeto go therefore longitudinal correction distance of a thrusterdecreases gradually with the decrease of time to go in ballisticdescending segment In the horizontal plane Δ119881
119911asymp Δ119881
6 International Journal of Aerospace Engineering
16
14
12
10
08
06
04
02
00
0 10 20 30 40 50 60 70 80 90
t (s)
Con
vert
ing
coeffi
cien
ts
Kz
Kx
Figure 6 Converting coefficients versus flight time
ΔV VΔVy
ΔVx
V
ΔVy
ΔVx
ΔV
x
y
o
120579998400
Figure 7 Schematic of velocity increment of a thruster
the horizontal correction distance is mainly influenced bythe time to go and hence the horizontal correction distancedecreases gradually with the decrease of time to goTherefore119896119909and 119896119911have the change trends shown in Figure 6
It can be known from (6) and Figure 6 that the value ofthe objective function (activated at the optimized firing phaseangle) tends to increase in ballistic descending segmentSupposing that 119905
119896is the time of ballistic vertex the value of
the objective function at 119905119896can be taken as a reference value
denoted by119860119872(119905119896) In ballistic ascending segment thrusters
can be activated if the value of the objective function is lessthan the reference value119860119872(119905
119896) otherwise they cannotThis
method can guarantee that thrusters are activated at the timewhen correction efficiency is higher especially in the ballisticascending segment
To sum up the firing time control algorithm can beimproved as the following equation
119905 minus 119905lowast
gt Δ119905fire
119860119872 (119905) lt 119860119872(119905119896) 119905 lt 119905
119896
119860119872 (119905) lt 119874119872(119905) 119905 ge 119905119896
(13)
In (13) 119905119896is the time of ballistic vertex
6 Results and Discussion
To investigate the correction performance of impulse thru-sters and verify the effectiveness of the firing control schemesome simulations of a rocket have been done by numericalintegration of the equations described above using a fourth-order Runge-Kutta algorithmThe rocket configuration usedin the simulation study is a representative 122mm artilleryrocket 299m long fin-stabilized with four pop-out fins onits rear part The main rocket motor burns for 255 s andimparts an impulse of 54247N-s to the rocket During themain rocket motor burns the forward velocity of the rocketis increased from 469ms to 9357ms The rocket weightmass center location from the nose tip roll inertia andpitch inertia before and after burn is 661430 kg 143121m016012 kg-m2 and 48423636 kg-m2 respectively Therocket is launched at sea level toward a target on the groundwith altitude and cross range equal to zero at a range of28000m The thruster ring is assumed to be located at0869m from the nose tip of the rocket and contains 50individual thrusters where each individual thruster impartsan impulse of 15N-s on the rocket body over a time durationof 002 sTheminimum firing interval of thrusters Δ119905fire is setto 02 s The desired activation threshold 120576 is set to 3 deg
The time-varying data of uncontrolled and controlledtrajectories with optimum firing control scheme against anominal command trajectory for the example rocket arecompared in Figure 8
Figure 8(a) plots the total number of thrusters fired versustime Five thrusters are fired in 10sim15 s and 43 thrustersare fired in 45sim70 s No thrusters are fired in 15sim45 s whichindicates that the correction efficiency is relatively low duringthis period No thrusters are fired after 70 s because thepredicted impact point deviation is too small to implementany trajectory correction The activation of thrusters willarouse the increase of attack angle of rocket as shown inFigure 8(b)
It can be known from Figures 8(c) and 8(d) that thepredicted longitudinal and horizontal impact point devia-tions reduce graduallyThe horizontal impact point deviationreduces quickly while longitudinal impact point deviationhas no significant change in 10sim20 s which indicates that thethrusters fired in this period are mainly used for horizontalcorrection corresponding to the fact that the horizontalcorrection efficiency of thrusters in this period is higher(119896119911is greater referencing to Figure 6) Both horizontal and
longitudinal impact point deviations reduce quickly in 45sim70 s which indicates that thrusters fired in this periodare used for both horizontal and longitudinal correctioncorresponding to the fact that the horizontal and longitudinalcorrection efficiency in this period is similar (119896
119909asymp 119896119911)
Figures 8(e) and 8(f) show that the trajectory correctionrocket flights to target point gradually under the effect ofthrusters The final impact point deviation of the rocket wasreduced from horizontal 3413m and longitudinal 4833m inthe uncontrolled case to horizontal 109m and longitudinal159m in the controlled case which demonstrates that thefiring control scheme works effectively
International Journal of Aerospace Engineering 7
60
50
40
30
20
10
0
minus100 20 40 60 80 100
Num
ber o
f im
pulse
thru
sters
fire
d
t (s)
(a) Total number of thrusters tired versus time
0 20 40 60 80 100
t (s)
Tota
l atta
ck an
gle (
deg)
16
14
12
10
08
06
04
02
00
minus02
(b) Total attack angle versus time
0 20 40 60 80 100
t (s)
500
400
300
200
100
0
minus100
minus200
Hor
izon
tal i
mpa
ct p
oint
dev
iatio
n (m
)
(c) Horizontal impact point deviation versus time
0 20 40 60 80 100
t (s)
Long
itudi
nal i
mpa
ct p
oint
dev
iatio
n (m
)600
400
200
0
(d) Longitudinal impact point deviation versus time
UncontrolledControlled
350
300
250
200
150
100
50
0
z(m
)
x (km)0 5 10 15 20 25 30
Target
+
(e) Cross range versus range
y(k
m)
x (km)0 5 10 15 20 25 30
Target
10
8
6
4
2
0
UncontrolledControlled
+
(f) Attitude versus range
Figure 8 Correction performance of the optimum firing control scheme
8 International Journal of Aerospace Engineering
600
400
200
0
minus200
minus400
minus600
minus1500 minus1000 minus500 0 500 1000 1500
Rang
e miss
(m)
Cross-range miss (m)
CEP = 359m
(a) Impact point distribution of uncontrolled rockets
Cross-range miss (m)
400
300
200
100
0
minus100
minus200
minus300minus100 0 100 200 300
Rang
e miss
(m)
CEP = 38m
(b) Impact point distribution of rockets with general firing controlscheme
Cross-range miss (m)
Rang
e miss
(m)
CEP = 20m300
200
100
0
minus100
minus200
minus300
minus50 0 50 100 150 200 250 300
(c) Impact point distribution of rockets with the optimum firingcontrol scheme
Figure 9 Impact point distribution
Figure 9 shows the impact point distribution using theMonte Carlo method The cases of the uncontrolled rocketsas well as of the rockets with general firing control schemeand optimum firing control scheme are shown The analysiswas performed for a statistical sample of 1024 simulationsAll initial conditions were modeled as Gaussian randomvariables with mean values and standard deviations givenin Table 1 Wind direction is a uniform random variablebetween 0 and 2120587 The nominal launching elevation angle is4231 deg but the mean value of launching elevation angleis set as 4251 deg a launching elevation angle error about02 deg and a launching azimuth angle error about 01 degwere introduced to simulate the accuracy errors of rockets
The result of Monte Carlo simulations is shown inFigure 9 for uncontrolled rockets the max value of rangemiss is 5892m while the min value of range miss is minus4219the mean value of range miss is 955 the max value of crossrange miss is 13498 while the min value of cross range
Table 1 Initial conditions and disturbances
Parameter Unit Mean value Standard deviationLaunching elevationangle deg 4251 02
Launching azimuthangle deg 01 02
Impulse of the mainrocket motor 100 01
Wind ms 0 2
miss is minus10636 the mean value of cross range miss is 438there are more points in the first quadrant (right upper side)of the plane coordinate system as shown in Figure 9(a)and the CEP of uncontrolled rockets is 359m Impact pointdistribution of the trajectory correction rockets reducesgreatly as shown in Figures 9(b) and 9(c) The rockets with
International Journal of Aerospace Engineering 9
400
350
300
250
200
150
100
50
0
0 10 20 30 40 50
Number of impulse thrusters
CEP
(m)
30N-s20N-s10N-s
(a) CEP versus number of thrusters and individual thruster impulse
400
350
300
250
200
150
100
50
0
CEP
(m)
0 200 400 600 800 1000
Total impulse (N-s)
30N-s20N-s10N-s
(b) CEP versus total impulse of thrusters and individual thrusterimpulse
9
8
7
6
5
4
3
2
1
5 10 15 20 25 30
Max
imal
tota
l atta
ck an
gle (
deg)
Individual thruster impulse (N-s)
100ms200ms300ms
(c) Maximal total attack angle versus individual thruster impulse andminimum firing interval
Figure 10 The impact of parameters of thrusters on CEP and flight stability of rockets
the general firing control scheme have a CEP of 38m whilethe CEP of rockets with the optimum firing control schemeis 20m The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of impact pointdispersion of rockets and the reduction of thruster consump-tion testify the effectiveness of firing control optimization
Figure 10 shows the impact of thruster parameters onthe CEP and flight stability of rockets Figure 10(a) shows
the relation between CEP of rockets number of thrustersmounted on rocket and individual thruster impulse It canbe known that the CEP of rockets is highly correlated withthe number of thrusters and individual thruster impulse andCEP reduces steadily as the number of thrusters or individualthruster impulse is increased
Figure 10(b) shows the relationship between CEP ofrockets individual thruster impulse and the total impulseof thrusters For a value of the total impulse as the individ-ual thruster impulse is increased the number of thrustersdecreases proportionally for the total impulse to remain as
10 International Journal of Aerospace Engineering
0 5 10 15 20 25 30
0
2
4
6
8
10
Nominal trajectoryTCR1TCR2
minus2
y(k
m)
x (km)
(a) Attitude versus range
0 5 10 15 20 25 30
0
50
100
Nominal trajectoryTCR1TCR2
x (km)
minus50
minus100
minus150
minus200
minus250
minus300
z(m
)(b) Cross range versus range
Figure 11 The trajectory of two TCRs
a constant As shown in Figure 10(b) the evolution of thethree curves is similar when the thruster impulse is smallthe number of thrusters is large and some thrusters willbe activated at time when the correction efficiency is lowerwhich is the unfavorable aspect for trajectory correctionhowever large thruster number means more correctionopportunity and the correction precision of a small thrusterimpulse is higher which is the favorable aspect for trajectorycorrection these two aspects are contradictory the combinedeffect of these two aspects leads to the similar evolution ofthe three curves The result indicates that CEP is mainlyinfluenced by the total impulse when the individual thrusterimpulse is reasonable CEP reduces gradually as the totalimpulse is increased and the value of individual thrusterimpulse has a small impact on CEP
Figure 10(c) shows the relationship between maximumtotal attack angle individual thruster impulse and theminimum firing interval (Δ119905fire) The results indicate thatindividual thruster impulse and minimum firing intervalhave a direct impact on the maximum total attack angleas individual thruster impulse increases or minimum firinginterval reduces the maximum total attack angle increaseswhich may affect the flight stability of trajectory correctionrockets
Based on the above discussion some suggestions are putforward to determine the thruster configuration parametersof trajectory correction rockets Firstly the total impulseshould be determined according to CEP needed because theimpact point dispersion is mainly influenced by the totalimpulse of lateral thrusters deployed Secondly individualthruster impulse should be determined according to the totalimpulse limits of layout space on the rocket flight stability ofrockets cost and so forth If the individual thruster impulseis too small there may be too many thrusters needed to bemounted on the rocket On the other hand if the individual
thruster impulse is too large the flight stability may deterio-rate Thirdly the minimum firing interval should be deter-mined according to the individual thruster impulse flightstability of rockets correction efficiency of thrusters and soforth If the individual thruster impulse is large a relativelylarge minimum firing interval should be set to guarantee theflight stability of rockets If the individual thruster impulse issmall a relatively small minimum firing interval time shouldbe set to insure thrusters can be activated at the segment oftrajectory while the correction efficiency is higher
Live experiments have been done to verify the effec-tiveness of the firing control scheme The characters of thetrajectory correction rockets (TCR) have been launched sameas the rocket described in simulations above Two TCRshave been launched toward a target on the ground withaltitude equal to 200m and cross range equal to zero at arange of 28000m the launching elevation angle was set to436 deg according to theweather of the time Figure 11 showsthe trajectory of two TCRs contrasted with the nominaltrajectory As shown in Figure 11(a) at the ballistic vertex theattitude of two TCRs is 300sim400m higher than the nominaltrajectory then the trajectory of two TCRs gradually closeto the nominal trajectory under the effect of flight controlsystem As shown in Figure 11(b) the cross range of thetwo TCRs gradually closes to the nominal trajectory underthe effect of flight control system The final impact pointdeviation of TCR1 is (45 212) and the final impact pointdeviation of TCR2 is (minus283 354) which demonstrates thefiring control scheme works effectively
7 Conclusion
This paper establishes the 6-DOF trajectorymodel of a rocketwith lateral force and presents an optimum control schemeof firing time and firing phase angle by taking impact point
International Journal of Aerospace Engineering 11
deviation as optimumobjective functionwhich takes accountof the difference of longitudinal and horizontal correctionefficiency firing delay roll rate flight stability and so forthThe result of Monte Carlo simulations shows that the uncon-trolled rockets have a CEP of 359m the CEPwas improved to38mwith the general firing control scheme as a contrast theCEP was improved to 20m with the optimum firing controlscheme The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of CEP and thereduction of thruster consumption testify the effectiveness offiring control optimization The variations of rocket impactpoint dispersion are analyzed with different impulse andnumber of impulse thrusters It is shown that the impactpoint dispersion is mainly influenced by the total impulseof impulse thrusters deployed and steadily decreases as thetotal impulse is increased The impulse number and firinginterval need to be optimized to insure the flight stabilityof rockets and impulse thrusters activated at time whenthe correction efficiency is higher Two trajectory correctionrockets have been launched to verify the effectiveness of thefiring control scheme the final impact point deviations of twotrajectory correction rockets are respectively (45 212) and(minus283 354) which demonstrates the firing control schemeworks effectively
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] M Costello ldquoExtended range of a gun launched smart projectileusing controllable canardsrdquo Shock and Vibration vol 8 no 3-4pp 203ndash213 2001
[2] J Rogers and M Costello ldquoDesign of a roll-stabilized mortarprojectile with reciprocating canardsrdquo Journal of GuidanceControl and Dynamics vol 33 no 4 pp 1026ndash1034 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofan asymmetric projectile with activating canardsrdquo Journal ofSpacecraft and Rockets vol 49 no 1 pp 130ndash135 2012
[4] M Costello and A Peterson ldquoLinear theory of a dual-spinprojectile in atmospheric flightrdquo Journal of Guidance Controland Dynamics vol 23 no 5 pp 789ndash797 2000
[5] A Elsaadany and Y Wen-Jun ldquoAccuracy improvement capa-bility of advanced projectile based on course correction fuzeconceptrdquo The Scientific World Journal vol 2014 Article ID273450 10 pages 2014
[6] M Amitay D R Smith V Kibens D E Parekh and A GlezerldquoAerodynamic flow control over an unconventional airfoil usingsynthetic jet actuatorsrdquoAIAA journal vol 39 no 3 pp 361ndash3702001
[7] M S L Hollis and F J Brandon ldquoRange correction module fora spin stabilized projectilerdquo US Patent Documents US-58165311998
[8] M S L Hollis and F J Brandon ldquoDesign and analysis of afuze-configurable range correction device for an artillery pro-jectilerdquo Report ARL-TR-2074 US Army Research LaboratoryAberdeen Proving Ground Aberdeen Md USA 1999
[9] J Brandeis and J Gill ldquoExperimental investigation of super- andhypersonic jet interaction on missile configurationsrdquo Journal ofSpacecraft and Rockets vol 35 no 3 pp 296ndash302 1998
[10] B Burchett A Peterson and M Costello ldquoPrediction ofswerving motion of a dual-spin projectile with lateral pulse jetsin atmospheric flightrdquo Mathematical and Computer Modellingvol 35 no 7-8 pp 821ndash834 2002
[11] D Corriveau P Wey and C Berner ldquoThrusters pairing guide-lines for trajectory corrections of projectilesrdquo Journal of Guid-ance Control and Dynamics vol 34 no 4 pp 1120ndash1128 2011
[12] T Harkins and T Brown ldquoUsing active damping as a precision-enhancing technology for 275-inch rocketsrdquo Tech Rep ARL-TR-1772 US Army Research Laboratory Aberdeen Md USA1999
[13] T Jitpraphai and M Costello ldquoDispersion reduction of a directfire rocket using lateral pulse jetsrdquo Journal of Spacecraft andRockets vol 38 no 6 pp 929ndash936 2001
[14] B Burchett and M Costello ldquoModel predictive lateral pulse jetcontrol of an atmospheric rocketrdquo Journal of Guidance Controland Dynamics vol 25 no 5 pp 860ndash867 2002
[15] S K Gupta S Saxena A Singhal and A K Ghosh ldquoTrajectorycorrection flight control system using pulsejet on an artilleryrocketrdquo Defence Science Journal vol 58 no 1 pp 15ndash33 2008
[16] B Pavkovic M Pavic and D Cuk ldquoFrequency-modulatedpulse-jet control of an artillery rocketrdquo Journal of Spacecraft andRockets vol 49 no 2 pp 286ndash294 2012
[17] B Pavkovic M Pavic and D Cuk ldquoEnhancing the precisionof artillery rockets using pulsejet control systems with activedampingrdquo Scientific Technical Review vol 62 no 2 pp 10ndash192012
[18] H-W Yang L-H Dou and M-G Gan ldquoControl method ofimpulse actuator of antiaircraft trajectory correction projectilerdquoTransaction of Beijing Institute of Technology vol 31 no 10 pp1184ndash1188 2011
[19] Y-J Cao S-X Yang and X-J Li ldquoResearch on firing phaseangle optimization of terminal trajectory correction projectilebased on pulse jet controlrdquo Acta Armamentarii vol 29 no 8pp 897ndash901 2008
[20] F Gao and H Zhang ldquoStudy of 2-D trajectory correction basedon geomagnetic detection with impulse force for projectilesrdquoJournal of System Simulation vol 23 no 1 pp 123ndash128 2011
[21] X Qian R Lin and Y Zhao Aerothermodynamics of MissileFlight Beijing Institute of Technology Press Beijing China2008
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 3
The translational kinetic differential equations of therocket in aero-ballistic reference frame are given in
119889119881
119889119905= 1198751199092
+ 1198651199092
+ 1198791199092
1198811198891205791015840
119889119905= 1198751199102
+ 1198651199102
+ 1198791199102
minus119881 cos 1205791015840119889120595V
119889119905= 1198751199112
+ 1198651199112
+ 1198791199112
(3)
The applied loads appearing in (3) consist of main rocketthrust (119875) lateral thruster force (119879) and other forces (119865) com-ponents119881 1205791015840 and120595V are the velocity trajectory incline angleand flight path azimuth angle of the rocket respectively
Lateral moment of an impulse thruster in quasibodyreference frame is given by
[[[
[
1198721198791199094
1198721198791199104
1198721198791199114
]]]
]
=[[[
[
0
minus1198791199114
119897
1198791199104
119897
]]]
]
(4)
The rotational kinetic differential equations of the rocket inquasibody reference frame are given by
[[[[[[[[
[
1198691199094
1198891205961199094
119889119905
1198691199104
1198891205961199104
119889119905
1198691199114
1198891205961199114
119889119905
]]]]]]]]
]
=[[[
[
1198721199094
+ 1198721198791199094
1198721199104
+ 1198721198791199104
1198721199114
+ 1198721198791199114
]]]
]
minus[[[
[
0
(1198691199094
minus 1198691199114
) 1205961199094
1205961199114
(1198691199104
minus 1198691199094
) 1205961199094
1205961199104
]]]
]
+
[[[[[
[
0
minus1198691199114
1205961199114
119889120574
119889119905
1198691199104
1205961199104
119889120574
119889119905
]]]]]
]
(5)
The applied moments appearing in (5) contain contributionsfrom lateral thruster forces denoted by119872
119879 and other forces
denoted by119872 120574 is the Euler roll angle of the rocket1199081199094
1199081199104
1199081199114
are components of the angular rate vector 1198691199094
1198691199104
1198691199114
arecomponents of the transverse moment of inertia
Othermotion equations of the rocket not involving lateralforces or lateral moments can be obtained in [21]
3 The Establishing of OptimumObjective Function
Figure 2 shows trajectory correction progress of an impulsethruster Assuming that119872 is the target and119874 is the predictedimpact point computed by flight control system the distancebetween the predicted impact point and the target is119874119872 andthe longitudinal and horizontal deviations are Δ119871 and Δ119867respectively Assuming that the longitudinal and horizontalcorrection distance of an impulse thruster is 119875
119909and 119875
119911
respectively if the impulse thruster is activated the predictedimpact point of the rocket will be changed to 119860 then the
O
Z
X
M
A
Px
Pz
ΔL
ΔH
Figure 2 Schematic of trajectory correction
distance between the predicted impact point and the targetwill be reduced to be 119860119872 upon the impact of an impulsethruster
Because the aim of trajectory correction is to reduce theimpact point deviation it is foremost to make best use of theenergy of impulse thrusters to obtain the minimum impactpoint deviationTherefore the remaining impact point devia-tion after an impulse thruster was activated namely119860119872 andis taken as the optimization objective function in this paperIt is assumed that the positive direction of Δ119871 and 119875
119909is the
same and the positive direction of Δ119867 and 119875119911is the same
and then 119860119872 can be described by
119860119872 = [(Δ119871 + 119875119909)2
+ (Δ119867 + 119875119911)2
]12
(6)
In (6) Δ119871 and Δ119867 are the longitudinal and horizontalpredicted deviation computed by the flight control systemand remain constant during a short time so the change of119860119872 mainly relates to 119875
119909and 119875
119911of the impulse thruster
activated 119875119909and 119875
119911depend on roll rate of the rocket
impulse firing time and firing angle phase of the thrusterindividual thruster impulse and roll rate of the rocket havebeen determined in the design phase of trajectory correctionrockets therefore the firing time and firing phase angle aretaken as optimization variables of the objective function inthe flight phase
4 Optimization of Firing Phase Angle
The optimization variables firing time and firing phase angleare relatively independent and assumed that the firing timeof an impulse thruster has been identified then the firingphase angle is the only optimization variable of an impulsethruster To analyze the impact of firing phase angle on thetrajectory correction performance the lateral force is seenas a constant because the thrusters are active over a very
4 International Journal of Aerospace Engineering
O
Z
X
M
120572
A1
A2
ΔL
ΔH
(a) With equal converting coefficients
O
Z
X
M
ΔL
ΔH
120572
A2
A1
(b) With unequal converting coefficients
Figure 3 Trajectory correction performance with equal and unequal converting coefficients
short duration of time and 120579 denotes the phase angle oflateral force in quasibody reference frame To get the besttrajectory correction performance the best phase angle oflateral force leads to the minimum value of 119860119872 is denotedby 120579119898 and should be computed firstly The conventional
method to compute 120579 is by making its value equal to phaseangle of trajectory deviation denoted by 120572 referencing toFigure 3(a) However whether or not this method can getthe best trajectory correction performance depends on thelongitudinal and horizontal correction efficiency (namely asconverting coefficient) of the impulse thrusters
Given that the correction distance of an impulse thrusteris proportional to the thruster impulse 119875
119909and 119875
119911can be
described by
119875119909= 119896119909sdot cos 120579
119875119911= 119896119911sdot sin 120579
(7)
In (7) 119868 is the impulse of a thruster 119896119909and 119896
119911are longi-
tudinal and horizontal converting coefficients of an impulsethruster for the rocket The converting coefficients reflectthe correction efficiency of the impulse thruster The impactof correction efficiency on the objective function will beanalyzed under two conditions
(1) When 119896119909= 119896119911 longitudinal and horizontal correction
efficiency of an impulse thruster is the same and assumed that119874 is the predicted impact point of the rocket then possibleimpact points after correction of an impulse thruster forma circle around 119874 Assuming that the correction distancesare 119874119860
1and 119874119860
2 corresponding to 120579 = 120572 and 120579 = 120572
then 1198741198601
= 1198741198602 and 119874119860
1has the same direction with
119874119872 referring to Figure 3(a) The following equation can beobtained according to triangle trilateral theorem
1198741198601+ 1198601119872 lt 119874119860
2+ 1198602119872 (8)
Because 1198741198601
= 1198741198602 1198601119872 lt 119860
2119872 Therefore when 119896
119909=
119896119911 objective function 119860119872 can get the minimum value with
120579 = 120572(2)When 119896
119909= 119896119911 longitudinal and horizontal correction
efficiency of an impulse thruster is different whether or not1198741198601= 119874119860
2is not certain and referring to Figure 3(b)119860
1119872
may be bigger than1198602119872 so objective function cannot always
get the minimum value with 120579 = 120572 Under this condition anew method is required to compute 120579
119898
In fact 119896119909
= 119896119911in most of the flight time as shown in
Figure 6 a newmethod to compute best phase angle of lateralforce is proposed in this paper Because an analytic solutionis not acquired by (6) 120579
119898is solved by the binary iteration
method given in Figure 4 where [1205791 1205792] is the solution limits
and 119873 is the number of iterationsTo reduce the number of iterations and improve the
solution accuracy solution limits can be acquired by (9)The solution accuracy can reach 01 deg with 119873 = 10 so
120579119898can be solved quickly by this methodThe firing phase angle denoted by Φ
119888 is the phase angle
of the impulse thruster in quasibody reference frame whenit gets the firing signal from the flight control system Firingtime delay and impulse duration time should be taken intoaccount tomake sure the average angle of lateral force is equalto 120579119898
[1205791 1205792] =
[0∘
90∘
] Δ119867 lt 0 Δ119871 lt 0
[90∘
180∘
] Δ119867 lt 0 Δ119871 gt 0
[180∘
270∘
] Δ119867 gt 0 Δ119871 gt 0
[270∘
360∘
] Δ119867 gt 0 Δ119871 lt 0
(9)
Schematic of firing phase angle is given in Figure 5 Therelation between firing phase angle Φ
119888and 120579119898is given by
Φ119888= 120579119898
+ 120587 minus 120596 (120591119889+ 120591) (10)
International Journal of Aerospace Engineering 5
[1205791 1205792]i = 1
i lt N120579m = (1205791 + 1205792)2
End
i++
AM(1205791) lt AM(1205792)1205792 = 1205792
1205791 = (1205791 + 1205792)2
1205791 = 12057911205792 = (1205791 + 1205792)2
No
No
Yes
Yes
Figure 4 Solution flow of 120579119898
y4
z4Φc
180∘
270∘
120579m
120591
w
120591d
T
Figure 5 Schematic of firing phase angle
In (10) 120591119889is the firing delay and 120591 is a half of the impulse
duration 120596 is the roll angular rate of rocketWhen the phase angle Φ of the impulse thruster that will
be activated is equal to the firing phase angle the impulsethruster can be activated the condition to activate an impulsethruster is
1003816100381610038161003816Φ minus Φ119888
1003816100381610038161003816 le 120576 (11)
In (11) 120576 is the desired activation threshold
5 Optimization of Firing Time
After the optimization of firing phase angle the otheroptimization variable of objective function is the firing time
of thrustersThe general firing time control algorithmhas twostrategies
(1) Time elapsed from the previous impulse thruster firingmust be longer than a specified time duration Δ119905fire
119905 minus 119905lowast
gt Δ119905fire (12)
In (12) 119905lowast is the firing time of the previous impulse thruster(2) If predicted impact point deviation is greater than a
specified distance activate the thruster as soon as possibleΔ119905fire is an important design parameter of thrusters If
it is set too low the rocket does not have sufficient timeto respond and too many thrusters will be fired tending toovercompensate for trajectory deviation Simultaneously alower Δ119905fire may have an impact on the flight stability of therocket On the other hand if it is set too high only a smallnumber of thrusters can possibly be fired and the capabilitiesof the residual impulse thrusters will be wasted
The impact of flight time on trajectory correction perfor-mance of thrusters is not considered by strategy (2) whichmay lead to the thrusters being activated at the time whenthe correction efficiency is lower Gao and Zhang [20] gavethe conclusion that the longitudinal correction efficiencyof thrusters is lower in ballistic ascending segment of therocket and longitudinal and horizontal correction efficiencyreduces with the decrease of time to go in ballistic descendingsegment Simulation results of converting coefficients of arocket are shown in Figure 6 the launch angle of the rocketis 45 deg and the impact angle is minus64 deg
As shown in Figure 6 119896119909and 119896
119911have different change
trends and 119896119909increases gradually in ballistic ascending
segment and decreases gradually in ballistic descendingsegment while the 119896
119911decreases gradually with the decrease
of time to goThe behavior of 119896119909and 119896119911has a physical reason
According to the kinetic energy theorem the rocket willget a velocity increment Δ119881 when an impulse thruster wasactivated the direction of Δ119881 is nearly perpendicular to thevelocity direction of rocket When an impulse thruster wasactivated for longitudinal correctionΔ119881 can be decomposedinto Δ119881
119909and Δ119881
119911 as shown in Figure 7 supposing that the
lateral force of the impulse thruster is upward then Δ119881119910
=
Δ119881 cos(1205791015840) andΔ119881119909= minusΔ119881 sin(1205791015840) where 1205791015840 denotes the tra-
jectory incline angle In ballistic ascending segment 1205791015840 gt 0so Δ119881
119909lt 0 which will shorten the rocket range while Δ119881
119910gt
0 which will extend the rocket range the impact of Δ119881119909
and Δ119881119910is contradictory and therefore the impact of Δ119881 is
relatively small at the beginning of ballistic descending seg-ment As the trajectory inclination angle ranges from 45 degto 0 deg the absolute value of Δ119881
119910increases gradually while
the absolute value of Δ119881119909decreases gradually as a result the
longitudinal correction distance of a thruster increases grad-ually in ballistic ascending segment In ballistic descendingsegment trajectory inclination angle ranges from 0 deg tominus64 deg so Δ119881
119909gt 0 which will extend the rocket range and
Δ119881119910
gt 0 which will also extend the rocket range the longi-tudinal correction distance is mainly influenced by the timeto go therefore longitudinal correction distance of a thrusterdecreases gradually with the decrease of time to go in ballisticdescending segment In the horizontal plane Δ119881
119911asymp Δ119881
6 International Journal of Aerospace Engineering
16
14
12
10
08
06
04
02
00
0 10 20 30 40 50 60 70 80 90
t (s)
Con
vert
ing
coeffi
cien
ts
Kz
Kx
Figure 6 Converting coefficients versus flight time
ΔV VΔVy
ΔVx
V
ΔVy
ΔVx
ΔV
x
y
o
120579998400
Figure 7 Schematic of velocity increment of a thruster
the horizontal correction distance is mainly influenced bythe time to go and hence the horizontal correction distancedecreases gradually with the decrease of time to goTherefore119896119909and 119896119911have the change trends shown in Figure 6
It can be known from (6) and Figure 6 that the value ofthe objective function (activated at the optimized firing phaseangle) tends to increase in ballistic descending segmentSupposing that 119905
119896is the time of ballistic vertex the value of
the objective function at 119905119896can be taken as a reference value
denoted by119860119872(119905119896) In ballistic ascending segment thrusters
can be activated if the value of the objective function is lessthan the reference value119860119872(119905
119896) otherwise they cannotThis
method can guarantee that thrusters are activated at the timewhen correction efficiency is higher especially in the ballisticascending segment
To sum up the firing time control algorithm can beimproved as the following equation
119905 minus 119905lowast
gt Δ119905fire
119860119872 (119905) lt 119860119872(119905119896) 119905 lt 119905
119896
119860119872 (119905) lt 119874119872(119905) 119905 ge 119905119896
(13)
In (13) 119905119896is the time of ballistic vertex
6 Results and Discussion
To investigate the correction performance of impulse thru-sters and verify the effectiveness of the firing control schemesome simulations of a rocket have been done by numericalintegration of the equations described above using a fourth-order Runge-Kutta algorithmThe rocket configuration usedin the simulation study is a representative 122mm artilleryrocket 299m long fin-stabilized with four pop-out fins onits rear part The main rocket motor burns for 255 s andimparts an impulse of 54247N-s to the rocket During themain rocket motor burns the forward velocity of the rocketis increased from 469ms to 9357ms The rocket weightmass center location from the nose tip roll inertia andpitch inertia before and after burn is 661430 kg 143121m016012 kg-m2 and 48423636 kg-m2 respectively Therocket is launched at sea level toward a target on the groundwith altitude and cross range equal to zero at a range of28000m The thruster ring is assumed to be located at0869m from the nose tip of the rocket and contains 50individual thrusters where each individual thruster impartsan impulse of 15N-s on the rocket body over a time durationof 002 sTheminimum firing interval of thrusters Δ119905fire is setto 02 s The desired activation threshold 120576 is set to 3 deg
The time-varying data of uncontrolled and controlledtrajectories with optimum firing control scheme against anominal command trajectory for the example rocket arecompared in Figure 8
Figure 8(a) plots the total number of thrusters fired versustime Five thrusters are fired in 10sim15 s and 43 thrustersare fired in 45sim70 s No thrusters are fired in 15sim45 s whichindicates that the correction efficiency is relatively low duringthis period No thrusters are fired after 70 s because thepredicted impact point deviation is too small to implementany trajectory correction The activation of thrusters willarouse the increase of attack angle of rocket as shown inFigure 8(b)
It can be known from Figures 8(c) and 8(d) that thepredicted longitudinal and horizontal impact point devia-tions reduce graduallyThe horizontal impact point deviationreduces quickly while longitudinal impact point deviationhas no significant change in 10sim20 s which indicates that thethrusters fired in this period are mainly used for horizontalcorrection corresponding to the fact that the horizontalcorrection efficiency of thrusters in this period is higher(119896119911is greater referencing to Figure 6) Both horizontal and
longitudinal impact point deviations reduce quickly in 45sim70 s which indicates that thrusters fired in this periodare used for both horizontal and longitudinal correctioncorresponding to the fact that the horizontal and longitudinalcorrection efficiency in this period is similar (119896
119909asymp 119896119911)
Figures 8(e) and 8(f) show that the trajectory correctionrocket flights to target point gradually under the effect ofthrusters The final impact point deviation of the rocket wasreduced from horizontal 3413m and longitudinal 4833m inthe uncontrolled case to horizontal 109m and longitudinal159m in the controlled case which demonstrates that thefiring control scheme works effectively
International Journal of Aerospace Engineering 7
60
50
40
30
20
10
0
minus100 20 40 60 80 100
Num
ber o
f im
pulse
thru
sters
fire
d
t (s)
(a) Total number of thrusters tired versus time
0 20 40 60 80 100
t (s)
Tota
l atta
ck an
gle (
deg)
16
14
12
10
08
06
04
02
00
minus02
(b) Total attack angle versus time
0 20 40 60 80 100
t (s)
500
400
300
200
100
0
minus100
minus200
Hor
izon
tal i
mpa
ct p
oint
dev
iatio
n (m
)
(c) Horizontal impact point deviation versus time
0 20 40 60 80 100
t (s)
Long
itudi
nal i
mpa
ct p
oint
dev
iatio
n (m
)600
400
200
0
(d) Longitudinal impact point deviation versus time
UncontrolledControlled
350
300
250
200
150
100
50
0
z(m
)
x (km)0 5 10 15 20 25 30
Target
+
(e) Cross range versus range
y(k
m)
x (km)0 5 10 15 20 25 30
Target
10
8
6
4
2
0
UncontrolledControlled
+
(f) Attitude versus range
Figure 8 Correction performance of the optimum firing control scheme
8 International Journal of Aerospace Engineering
600
400
200
0
minus200
minus400
minus600
minus1500 minus1000 minus500 0 500 1000 1500
Rang
e miss
(m)
Cross-range miss (m)
CEP = 359m
(a) Impact point distribution of uncontrolled rockets
Cross-range miss (m)
400
300
200
100
0
minus100
minus200
minus300minus100 0 100 200 300
Rang
e miss
(m)
CEP = 38m
(b) Impact point distribution of rockets with general firing controlscheme
Cross-range miss (m)
Rang
e miss
(m)
CEP = 20m300
200
100
0
minus100
minus200
minus300
minus50 0 50 100 150 200 250 300
(c) Impact point distribution of rockets with the optimum firingcontrol scheme
Figure 9 Impact point distribution
Figure 9 shows the impact point distribution using theMonte Carlo method The cases of the uncontrolled rocketsas well as of the rockets with general firing control schemeand optimum firing control scheme are shown The analysiswas performed for a statistical sample of 1024 simulationsAll initial conditions were modeled as Gaussian randomvariables with mean values and standard deviations givenin Table 1 Wind direction is a uniform random variablebetween 0 and 2120587 The nominal launching elevation angle is4231 deg but the mean value of launching elevation angleis set as 4251 deg a launching elevation angle error about02 deg and a launching azimuth angle error about 01 degwere introduced to simulate the accuracy errors of rockets
The result of Monte Carlo simulations is shown inFigure 9 for uncontrolled rockets the max value of rangemiss is 5892m while the min value of range miss is minus4219the mean value of range miss is 955 the max value of crossrange miss is 13498 while the min value of cross range
Table 1 Initial conditions and disturbances
Parameter Unit Mean value Standard deviationLaunching elevationangle deg 4251 02
Launching azimuthangle deg 01 02
Impulse of the mainrocket motor 100 01
Wind ms 0 2
miss is minus10636 the mean value of cross range miss is 438there are more points in the first quadrant (right upper side)of the plane coordinate system as shown in Figure 9(a)and the CEP of uncontrolled rockets is 359m Impact pointdistribution of the trajectory correction rockets reducesgreatly as shown in Figures 9(b) and 9(c) The rockets with
International Journal of Aerospace Engineering 9
400
350
300
250
200
150
100
50
0
0 10 20 30 40 50
Number of impulse thrusters
CEP
(m)
30N-s20N-s10N-s
(a) CEP versus number of thrusters and individual thruster impulse
400
350
300
250
200
150
100
50
0
CEP
(m)
0 200 400 600 800 1000
Total impulse (N-s)
30N-s20N-s10N-s
(b) CEP versus total impulse of thrusters and individual thrusterimpulse
9
8
7
6
5
4
3
2
1
5 10 15 20 25 30
Max
imal
tota
l atta
ck an
gle (
deg)
Individual thruster impulse (N-s)
100ms200ms300ms
(c) Maximal total attack angle versus individual thruster impulse andminimum firing interval
Figure 10 The impact of parameters of thrusters on CEP and flight stability of rockets
the general firing control scheme have a CEP of 38m whilethe CEP of rockets with the optimum firing control schemeis 20m The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of impact pointdispersion of rockets and the reduction of thruster consump-tion testify the effectiveness of firing control optimization
Figure 10 shows the impact of thruster parameters onthe CEP and flight stability of rockets Figure 10(a) shows
the relation between CEP of rockets number of thrustersmounted on rocket and individual thruster impulse It canbe known that the CEP of rockets is highly correlated withthe number of thrusters and individual thruster impulse andCEP reduces steadily as the number of thrusters or individualthruster impulse is increased
Figure 10(b) shows the relationship between CEP ofrockets individual thruster impulse and the total impulseof thrusters For a value of the total impulse as the individ-ual thruster impulse is increased the number of thrustersdecreases proportionally for the total impulse to remain as
10 International Journal of Aerospace Engineering
0 5 10 15 20 25 30
0
2
4
6
8
10
Nominal trajectoryTCR1TCR2
minus2
y(k
m)
x (km)
(a) Attitude versus range
0 5 10 15 20 25 30
0
50
100
Nominal trajectoryTCR1TCR2
x (km)
minus50
minus100
minus150
minus200
minus250
minus300
z(m
)(b) Cross range versus range
Figure 11 The trajectory of two TCRs
a constant As shown in Figure 10(b) the evolution of thethree curves is similar when the thruster impulse is smallthe number of thrusters is large and some thrusters willbe activated at time when the correction efficiency is lowerwhich is the unfavorable aspect for trajectory correctionhowever large thruster number means more correctionopportunity and the correction precision of a small thrusterimpulse is higher which is the favorable aspect for trajectorycorrection these two aspects are contradictory the combinedeffect of these two aspects leads to the similar evolution ofthe three curves The result indicates that CEP is mainlyinfluenced by the total impulse when the individual thrusterimpulse is reasonable CEP reduces gradually as the totalimpulse is increased and the value of individual thrusterimpulse has a small impact on CEP
Figure 10(c) shows the relationship between maximumtotal attack angle individual thruster impulse and theminimum firing interval (Δ119905fire) The results indicate thatindividual thruster impulse and minimum firing intervalhave a direct impact on the maximum total attack angleas individual thruster impulse increases or minimum firinginterval reduces the maximum total attack angle increaseswhich may affect the flight stability of trajectory correctionrockets
Based on the above discussion some suggestions are putforward to determine the thruster configuration parametersof trajectory correction rockets Firstly the total impulseshould be determined according to CEP needed because theimpact point dispersion is mainly influenced by the totalimpulse of lateral thrusters deployed Secondly individualthruster impulse should be determined according to the totalimpulse limits of layout space on the rocket flight stability ofrockets cost and so forth If the individual thruster impulseis too small there may be too many thrusters needed to bemounted on the rocket On the other hand if the individual
thruster impulse is too large the flight stability may deterio-rate Thirdly the minimum firing interval should be deter-mined according to the individual thruster impulse flightstability of rockets correction efficiency of thrusters and soforth If the individual thruster impulse is large a relativelylarge minimum firing interval should be set to guarantee theflight stability of rockets If the individual thruster impulse issmall a relatively small minimum firing interval time shouldbe set to insure thrusters can be activated at the segment oftrajectory while the correction efficiency is higher
Live experiments have been done to verify the effec-tiveness of the firing control scheme The characters of thetrajectory correction rockets (TCR) have been launched sameas the rocket described in simulations above Two TCRshave been launched toward a target on the ground withaltitude equal to 200m and cross range equal to zero at arange of 28000m the launching elevation angle was set to436 deg according to theweather of the time Figure 11 showsthe trajectory of two TCRs contrasted with the nominaltrajectory As shown in Figure 11(a) at the ballistic vertex theattitude of two TCRs is 300sim400m higher than the nominaltrajectory then the trajectory of two TCRs gradually closeto the nominal trajectory under the effect of flight controlsystem As shown in Figure 11(b) the cross range of thetwo TCRs gradually closes to the nominal trajectory underthe effect of flight control system The final impact pointdeviation of TCR1 is (45 212) and the final impact pointdeviation of TCR2 is (minus283 354) which demonstrates thefiring control scheme works effectively
7 Conclusion
This paper establishes the 6-DOF trajectorymodel of a rocketwith lateral force and presents an optimum control schemeof firing time and firing phase angle by taking impact point
International Journal of Aerospace Engineering 11
deviation as optimumobjective functionwhich takes accountof the difference of longitudinal and horizontal correctionefficiency firing delay roll rate flight stability and so forthThe result of Monte Carlo simulations shows that the uncon-trolled rockets have a CEP of 359m the CEPwas improved to38mwith the general firing control scheme as a contrast theCEP was improved to 20m with the optimum firing controlscheme The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of CEP and thereduction of thruster consumption testify the effectiveness offiring control optimization The variations of rocket impactpoint dispersion are analyzed with different impulse andnumber of impulse thrusters It is shown that the impactpoint dispersion is mainly influenced by the total impulseof impulse thrusters deployed and steadily decreases as thetotal impulse is increased The impulse number and firinginterval need to be optimized to insure the flight stabilityof rockets and impulse thrusters activated at time whenthe correction efficiency is higher Two trajectory correctionrockets have been launched to verify the effectiveness of thefiring control scheme the final impact point deviations of twotrajectory correction rockets are respectively (45 212) and(minus283 354) which demonstrates the firing control schemeworks effectively
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] M Costello ldquoExtended range of a gun launched smart projectileusing controllable canardsrdquo Shock and Vibration vol 8 no 3-4pp 203ndash213 2001
[2] J Rogers and M Costello ldquoDesign of a roll-stabilized mortarprojectile with reciprocating canardsrdquo Journal of GuidanceControl and Dynamics vol 33 no 4 pp 1026ndash1034 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofan asymmetric projectile with activating canardsrdquo Journal ofSpacecraft and Rockets vol 49 no 1 pp 130ndash135 2012
[4] M Costello and A Peterson ldquoLinear theory of a dual-spinprojectile in atmospheric flightrdquo Journal of Guidance Controland Dynamics vol 23 no 5 pp 789ndash797 2000
[5] A Elsaadany and Y Wen-Jun ldquoAccuracy improvement capa-bility of advanced projectile based on course correction fuzeconceptrdquo The Scientific World Journal vol 2014 Article ID273450 10 pages 2014
[6] M Amitay D R Smith V Kibens D E Parekh and A GlezerldquoAerodynamic flow control over an unconventional airfoil usingsynthetic jet actuatorsrdquoAIAA journal vol 39 no 3 pp 361ndash3702001
[7] M S L Hollis and F J Brandon ldquoRange correction module fora spin stabilized projectilerdquo US Patent Documents US-58165311998
[8] M S L Hollis and F J Brandon ldquoDesign and analysis of afuze-configurable range correction device for an artillery pro-jectilerdquo Report ARL-TR-2074 US Army Research LaboratoryAberdeen Proving Ground Aberdeen Md USA 1999
[9] J Brandeis and J Gill ldquoExperimental investigation of super- andhypersonic jet interaction on missile configurationsrdquo Journal ofSpacecraft and Rockets vol 35 no 3 pp 296ndash302 1998
[10] B Burchett A Peterson and M Costello ldquoPrediction ofswerving motion of a dual-spin projectile with lateral pulse jetsin atmospheric flightrdquo Mathematical and Computer Modellingvol 35 no 7-8 pp 821ndash834 2002
[11] D Corriveau P Wey and C Berner ldquoThrusters pairing guide-lines for trajectory corrections of projectilesrdquo Journal of Guid-ance Control and Dynamics vol 34 no 4 pp 1120ndash1128 2011
[12] T Harkins and T Brown ldquoUsing active damping as a precision-enhancing technology for 275-inch rocketsrdquo Tech Rep ARL-TR-1772 US Army Research Laboratory Aberdeen Md USA1999
[13] T Jitpraphai and M Costello ldquoDispersion reduction of a directfire rocket using lateral pulse jetsrdquo Journal of Spacecraft andRockets vol 38 no 6 pp 929ndash936 2001
[14] B Burchett and M Costello ldquoModel predictive lateral pulse jetcontrol of an atmospheric rocketrdquo Journal of Guidance Controland Dynamics vol 25 no 5 pp 860ndash867 2002
[15] S K Gupta S Saxena A Singhal and A K Ghosh ldquoTrajectorycorrection flight control system using pulsejet on an artilleryrocketrdquo Defence Science Journal vol 58 no 1 pp 15ndash33 2008
[16] B Pavkovic M Pavic and D Cuk ldquoFrequency-modulatedpulse-jet control of an artillery rocketrdquo Journal of Spacecraft andRockets vol 49 no 2 pp 286ndash294 2012
[17] B Pavkovic M Pavic and D Cuk ldquoEnhancing the precisionof artillery rockets using pulsejet control systems with activedampingrdquo Scientific Technical Review vol 62 no 2 pp 10ndash192012
[18] H-W Yang L-H Dou and M-G Gan ldquoControl method ofimpulse actuator of antiaircraft trajectory correction projectilerdquoTransaction of Beijing Institute of Technology vol 31 no 10 pp1184ndash1188 2011
[19] Y-J Cao S-X Yang and X-J Li ldquoResearch on firing phaseangle optimization of terminal trajectory correction projectilebased on pulse jet controlrdquo Acta Armamentarii vol 29 no 8pp 897ndash901 2008
[20] F Gao and H Zhang ldquoStudy of 2-D trajectory correction basedon geomagnetic detection with impulse force for projectilesrdquoJournal of System Simulation vol 23 no 1 pp 123ndash128 2011
[21] X Qian R Lin and Y Zhao Aerothermodynamics of MissileFlight Beijing Institute of Technology Press Beijing China2008
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Aerospace Engineering
O
Z
X
M
120572
A1
A2
ΔL
ΔH
(a) With equal converting coefficients
O
Z
X
M
ΔL
ΔH
120572
A2
A1
(b) With unequal converting coefficients
Figure 3 Trajectory correction performance with equal and unequal converting coefficients
short duration of time and 120579 denotes the phase angle oflateral force in quasibody reference frame To get the besttrajectory correction performance the best phase angle oflateral force leads to the minimum value of 119860119872 is denotedby 120579119898 and should be computed firstly The conventional
method to compute 120579 is by making its value equal to phaseangle of trajectory deviation denoted by 120572 referencing toFigure 3(a) However whether or not this method can getthe best trajectory correction performance depends on thelongitudinal and horizontal correction efficiency (namely asconverting coefficient) of the impulse thrusters
Given that the correction distance of an impulse thrusteris proportional to the thruster impulse 119875
119909and 119875
119911can be
described by
119875119909= 119896119909sdot cos 120579
119875119911= 119896119911sdot sin 120579
(7)
In (7) 119868 is the impulse of a thruster 119896119909and 119896
119911are longi-
tudinal and horizontal converting coefficients of an impulsethruster for the rocket The converting coefficients reflectthe correction efficiency of the impulse thruster The impactof correction efficiency on the objective function will beanalyzed under two conditions
(1) When 119896119909= 119896119911 longitudinal and horizontal correction
efficiency of an impulse thruster is the same and assumed that119874 is the predicted impact point of the rocket then possibleimpact points after correction of an impulse thruster forma circle around 119874 Assuming that the correction distancesare 119874119860
1and 119874119860
2 corresponding to 120579 = 120572 and 120579 = 120572
then 1198741198601
= 1198741198602 and 119874119860
1has the same direction with
119874119872 referring to Figure 3(a) The following equation can beobtained according to triangle trilateral theorem
1198741198601+ 1198601119872 lt 119874119860
2+ 1198602119872 (8)
Because 1198741198601
= 1198741198602 1198601119872 lt 119860
2119872 Therefore when 119896
119909=
119896119911 objective function 119860119872 can get the minimum value with
120579 = 120572(2)When 119896
119909= 119896119911 longitudinal and horizontal correction
efficiency of an impulse thruster is different whether or not1198741198601= 119874119860
2is not certain and referring to Figure 3(b)119860
1119872
may be bigger than1198602119872 so objective function cannot always
get the minimum value with 120579 = 120572 Under this condition anew method is required to compute 120579
119898
In fact 119896119909
= 119896119911in most of the flight time as shown in
Figure 6 a newmethod to compute best phase angle of lateralforce is proposed in this paper Because an analytic solutionis not acquired by (6) 120579
119898is solved by the binary iteration
method given in Figure 4 where [1205791 1205792] is the solution limits
and 119873 is the number of iterationsTo reduce the number of iterations and improve the
solution accuracy solution limits can be acquired by (9)The solution accuracy can reach 01 deg with 119873 = 10 so
120579119898can be solved quickly by this methodThe firing phase angle denoted by Φ
119888 is the phase angle
of the impulse thruster in quasibody reference frame whenit gets the firing signal from the flight control system Firingtime delay and impulse duration time should be taken intoaccount tomake sure the average angle of lateral force is equalto 120579119898
[1205791 1205792] =
[0∘
90∘
] Δ119867 lt 0 Δ119871 lt 0
[90∘
180∘
] Δ119867 lt 0 Δ119871 gt 0
[180∘
270∘
] Δ119867 gt 0 Δ119871 gt 0
[270∘
360∘
] Δ119867 gt 0 Δ119871 lt 0
(9)
Schematic of firing phase angle is given in Figure 5 Therelation between firing phase angle Φ
119888and 120579119898is given by
Φ119888= 120579119898
+ 120587 minus 120596 (120591119889+ 120591) (10)
International Journal of Aerospace Engineering 5
[1205791 1205792]i = 1
i lt N120579m = (1205791 + 1205792)2
End
i++
AM(1205791) lt AM(1205792)1205792 = 1205792
1205791 = (1205791 + 1205792)2
1205791 = 12057911205792 = (1205791 + 1205792)2
No
No
Yes
Yes
Figure 4 Solution flow of 120579119898
y4
z4Φc
180∘
270∘
120579m
120591
w
120591d
T
Figure 5 Schematic of firing phase angle
In (10) 120591119889is the firing delay and 120591 is a half of the impulse
duration 120596 is the roll angular rate of rocketWhen the phase angle Φ of the impulse thruster that will
be activated is equal to the firing phase angle the impulsethruster can be activated the condition to activate an impulsethruster is
1003816100381610038161003816Φ minus Φ119888
1003816100381610038161003816 le 120576 (11)
In (11) 120576 is the desired activation threshold
5 Optimization of Firing Time
After the optimization of firing phase angle the otheroptimization variable of objective function is the firing time
of thrustersThe general firing time control algorithmhas twostrategies
(1) Time elapsed from the previous impulse thruster firingmust be longer than a specified time duration Δ119905fire
119905 minus 119905lowast
gt Δ119905fire (12)
In (12) 119905lowast is the firing time of the previous impulse thruster(2) If predicted impact point deviation is greater than a
specified distance activate the thruster as soon as possibleΔ119905fire is an important design parameter of thrusters If
it is set too low the rocket does not have sufficient timeto respond and too many thrusters will be fired tending toovercompensate for trajectory deviation Simultaneously alower Δ119905fire may have an impact on the flight stability of therocket On the other hand if it is set too high only a smallnumber of thrusters can possibly be fired and the capabilitiesof the residual impulse thrusters will be wasted
The impact of flight time on trajectory correction perfor-mance of thrusters is not considered by strategy (2) whichmay lead to the thrusters being activated at the time whenthe correction efficiency is lower Gao and Zhang [20] gavethe conclusion that the longitudinal correction efficiencyof thrusters is lower in ballistic ascending segment of therocket and longitudinal and horizontal correction efficiencyreduces with the decrease of time to go in ballistic descendingsegment Simulation results of converting coefficients of arocket are shown in Figure 6 the launch angle of the rocketis 45 deg and the impact angle is minus64 deg
As shown in Figure 6 119896119909and 119896
119911have different change
trends and 119896119909increases gradually in ballistic ascending
segment and decreases gradually in ballistic descendingsegment while the 119896
119911decreases gradually with the decrease
of time to goThe behavior of 119896119909and 119896119911has a physical reason
According to the kinetic energy theorem the rocket willget a velocity increment Δ119881 when an impulse thruster wasactivated the direction of Δ119881 is nearly perpendicular to thevelocity direction of rocket When an impulse thruster wasactivated for longitudinal correctionΔ119881 can be decomposedinto Δ119881
119909and Δ119881
119911 as shown in Figure 7 supposing that the
lateral force of the impulse thruster is upward then Δ119881119910
=
Δ119881 cos(1205791015840) andΔ119881119909= minusΔ119881 sin(1205791015840) where 1205791015840 denotes the tra-
jectory incline angle In ballistic ascending segment 1205791015840 gt 0so Δ119881
119909lt 0 which will shorten the rocket range while Δ119881
119910gt
0 which will extend the rocket range the impact of Δ119881119909
and Δ119881119910is contradictory and therefore the impact of Δ119881 is
relatively small at the beginning of ballistic descending seg-ment As the trajectory inclination angle ranges from 45 degto 0 deg the absolute value of Δ119881
119910increases gradually while
the absolute value of Δ119881119909decreases gradually as a result the
longitudinal correction distance of a thruster increases grad-ually in ballistic ascending segment In ballistic descendingsegment trajectory inclination angle ranges from 0 deg tominus64 deg so Δ119881
119909gt 0 which will extend the rocket range and
Δ119881119910
gt 0 which will also extend the rocket range the longi-tudinal correction distance is mainly influenced by the timeto go therefore longitudinal correction distance of a thrusterdecreases gradually with the decrease of time to go in ballisticdescending segment In the horizontal plane Δ119881
119911asymp Δ119881
6 International Journal of Aerospace Engineering
16
14
12
10
08
06
04
02
00
0 10 20 30 40 50 60 70 80 90
t (s)
Con
vert
ing
coeffi
cien
ts
Kz
Kx
Figure 6 Converting coefficients versus flight time
ΔV VΔVy
ΔVx
V
ΔVy
ΔVx
ΔV
x
y
o
120579998400
Figure 7 Schematic of velocity increment of a thruster
the horizontal correction distance is mainly influenced bythe time to go and hence the horizontal correction distancedecreases gradually with the decrease of time to goTherefore119896119909and 119896119911have the change trends shown in Figure 6
It can be known from (6) and Figure 6 that the value ofthe objective function (activated at the optimized firing phaseangle) tends to increase in ballistic descending segmentSupposing that 119905
119896is the time of ballistic vertex the value of
the objective function at 119905119896can be taken as a reference value
denoted by119860119872(119905119896) In ballistic ascending segment thrusters
can be activated if the value of the objective function is lessthan the reference value119860119872(119905
119896) otherwise they cannotThis
method can guarantee that thrusters are activated at the timewhen correction efficiency is higher especially in the ballisticascending segment
To sum up the firing time control algorithm can beimproved as the following equation
119905 minus 119905lowast
gt Δ119905fire
119860119872 (119905) lt 119860119872(119905119896) 119905 lt 119905
119896
119860119872 (119905) lt 119874119872(119905) 119905 ge 119905119896
(13)
In (13) 119905119896is the time of ballistic vertex
6 Results and Discussion
To investigate the correction performance of impulse thru-sters and verify the effectiveness of the firing control schemesome simulations of a rocket have been done by numericalintegration of the equations described above using a fourth-order Runge-Kutta algorithmThe rocket configuration usedin the simulation study is a representative 122mm artilleryrocket 299m long fin-stabilized with four pop-out fins onits rear part The main rocket motor burns for 255 s andimparts an impulse of 54247N-s to the rocket During themain rocket motor burns the forward velocity of the rocketis increased from 469ms to 9357ms The rocket weightmass center location from the nose tip roll inertia andpitch inertia before and after burn is 661430 kg 143121m016012 kg-m2 and 48423636 kg-m2 respectively Therocket is launched at sea level toward a target on the groundwith altitude and cross range equal to zero at a range of28000m The thruster ring is assumed to be located at0869m from the nose tip of the rocket and contains 50individual thrusters where each individual thruster impartsan impulse of 15N-s on the rocket body over a time durationof 002 sTheminimum firing interval of thrusters Δ119905fire is setto 02 s The desired activation threshold 120576 is set to 3 deg
The time-varying data of uncontrolled and controlledtrajectories with optimum firing control scheme against anominal command trajectory for the example rocket arecompared in Figure 8
Figure 8(a) plots the total number of thrusters fired versustime Five thrusters are fired in 10sim15 s and 43 thrustersare fired in 45sim70 s No thrusters are fired in 15sim45 s whichindicates that the correction efficiency is relatively low duringthis period No thrusters are fired after 70 s because thepredicted impact point deviation is too small to implementany trajectory correction The activation of thrusters willarouse the increase of attack angle of rocket as shown inFigure 8(b)
It can be known from Figures 8(c) and 8(d) that thepredicted longitudinal and horizontal impact point devia-tions reduce graduallyThe horizontal impact point deviationreduces quickly while longitudinal impact point deviationhas no significant change in 10sim20 s which indicates that thethrusters fired in this period are mainly used for horizontalcorrection corresponding to the fact that the horizontalcorrection efficiency of thrusters in this period is higher(119896119911is greater referencing to Figure 6) Both horizontal and
longitudinal impact point deviations reduce quickly in 45sim70 s which indicates that thrusters fired in this periodare used for both horizontal and longitudinal correctioncorresponding to the fact that the horizontal and longitudinalcorrection efficiency in this period is similar (119896
119909asymp 119896119911)
Figures 8(e) and 8(f) show that the trajectory correctionrocket flights to target point gradually under the effect ofthrusters The final impact point deviation of the rocket wasreduced from horizontal 3413m and longitudinal 4833m inthe uncontrolled case to horizontal 109m and longitudinal159m in the controlled case which demonstrates that thefiring control scheme works effectively
International Journal of Aerospace Engineering 7
60
50
40
30
20
10
0
minus100 20 40 60 80 100
Num
ber o
f im
pulse
thru
sters
fire
d
t (s)
(a) Total number of thrusters tired versus time
0 20 40 60 80 100
t (s)
Tota
l atta
ck an
gle (
deg)
16
14
12
10
08
06
04
02
00
minus02
(b) Total attack angle versus time
0 20 40 60 80 100
t (s)
500
400
300
200
100
0
minus100
minus200
Hor
izon
tal i
mpa
ct p
oint
dev
iatio
n (m
)
(c) Horizontal impact point deviation versus time
0 20 40 60 80 100
t (s)
Long
itudi
nal i
mpa
ct p
oint
dev
iatio
n (m
)600
400
200
0
(d) Longitudinal impact point deviation versus time
UncontrolledControlled
350
300
250
200
150
100
50
0
z(m
)
x (km)0 5 10 15 20 25 30
Target
+
(e) Cross range versus range
y(k
m)
x (km)0 5 10 15 20 25 30
Target
10
8
6
4
2
0
UncontrolledControlled
+
(f) Attitude versus range
Figure 8 Correction performance of the optimum firing control scheme
8 International Journal of Aerospace Engineering
600
400
200
0
minus200
minus400
minus600
minus1500 minus1000 minus500 0 500 1000 1500
Rang
e miss
(m)
Cross-range miss (m)
CEP = 359m
(a) Impact point distribution of uncontrolled rockets
Cross-range miss (m)
400
300
200
100
0
minus100
minus200
minus300minus100 0 100 200 300
Rang
e miss
(m)
CEP = 38m
(b) Impact point distribution of rockets with general firing controlscheme
Cross-range miss (m)
Rang
e miss
(m)
CEP = 20m300
200
100
0
minus100
minus200
minus300
minus50 0 50 100 150 200 250 300
(c) Impact point distribution of rockets with the optimum firingcontrol scheme
Figure 9 Impact point distribution
Figure 9 shows the impact point distribution using theMonte Carlo method The cases of the uncontrolled rocketsas well as of the rockets with general firing control schemeand optimum firing control scheme are shown The analysiswas performed for a statistical sample of 1024 simulationsAll initial conditions were modeled as Gaussian randomvariables with mean values and standard deviations givenin Table 1 Wind direction is a uniform random variablebetween 0 and 2120587 The nominal launching elevation angle is4231 deg but the mean value of launching elevation angleis set as 4251 deg a launching elevation angle error about02 deg and a launching azimuth angle error about 01 degwere introduced to simulate the accuracy errors of rockets
The result of Monte Carlo simulations is shown inFigure 9 for uncontrolled rockets the max value of rangemiss is 5892m while the min value of range miss is minus4219the mean value of range miss is 955 the max value of crossrange miss is 13498 while the min value of cross range
Table 1 Initial conditions and disturbances
Parameter Unit Mean value Standard deviationLaunching elevationangle deg 4251 02
Launching azimuthangle deg 01 02
Impulse of the mainrocket motor 100 01
Wind ms 0 2
miss is minus10636 the mean value of cross range miss is 438there are more points in the first quadrant (right upper side)of the plane coordinate system as shown in Figure 9(a)and the CEP of uncontrolled rockets is 359m Impact pointdistribution of the trajectory correction rockets reducesgreatly as shown in Figures 9(b) and 9(c) The rockets with
International Journal of Aerospace Engineering 9
400
350
300
250
200
150
100
50
0
0 10 20 30 40 50
Number of impulse thrusters
CEP
(m)
30N-s20N-s10N-s
(a) CEP versus number of thrusters and individual thruster impulse
400
350
300
250
200
150
100
50
0
CEP
(m)
0 200 400 600 800 1000
Total impulse (N-s)
30N-s20N-s10N-s
(b) CEP versus total impulse of thrusters and individual thrusterimpulse
9
8
7
6
5
4
3
2
1
5 10 15 20 25 30
Max
imal
tota
l atta
ck an
gle (
deg)
Individual thruster impulse (N-s)
100ms200ms300ms
(c) Maximal total attack angle versus individual thruster impulse andminimum firing interval
Figure 10 The impact of parameters of thrusters on CEP and flight stability of rockets
the general firing control scheme have a CEP of 38m whilethe CEP of rockets with the optimum firing control schemeis 20m The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of impact pointdispersion of rockets and the reduction of thruster consump-tion testify the effectiveness of firing control optimization
Figure 10 shows the impact of thruster parameters onthe CEP and flight stability of rockets Figure 10(a) shows
the relation between CEP of rockets number of thrustersmounted on rocket and individual thruster impulse It canbe known that the CEP of rockets is highly correlated withthe number of thrusters and individual thruster impulse andCEP reduces steadily as the number of thrusters or individualthruster impulse is increased
Figure 10(b) shows the relationship between CEP ofrockets individual thruster impulse and the total impulseof thrusters For a value of the total impulse as the individ-ual thruster impulse is increased the number of thrustersdecreases proportionally for the total impulse to remain as
10 International Journal of Aerospace Engineering
0 5 10 15 20 25 30
0
2
4
6
8
10
Nominal trajectoryTCR1TCR2
minus2
y(k
m)
x (km)
(a) Attitude versus range
0 5 10 15 20 25 30
0
50
100
Nominal trajectoryTCR1TCR2
x (km)
minus50
minus100
minus150
minus200
minus250
minus300
z(m
)(b) Cross range versus range
Figure 11 The trajectory of two TCRs
a constant As shown in Figure 10(b) the evolution of thethree curves is similar when the thruster impulse is smallthe number of thrusters is large and some thrusters willbe activated at time when the correction efficiency is lowerwhich is the unfavorable aspect for trajectory correctionhowever large thruster number means more correctionopportunity and the correction precision of a small thrusterimpulse is higher which is the favorable aspect for trajectorycorrection these two aspects are contradictory the combinedeffect of these two aspects leads to the similar evolution ofthe three curves The result indicates that CEP is mainlyinfluenced by the total impulse when the individual thrusterimpulse is reasonable CEP reduces gradually as the totalimpulse is increased and the value of individual thrusterimpulse has a small impact on CEP
Figure 10(c) shows the relationship between maximumtotal attack angle individual thruster impulse and theminimum firing interval (Δ119905fire) The results indicate thatindividual thruster impulse and minimum firing intervalhave a direct impact on the maximum total attack angleas individual thruster impulse increases or minimum firinginterval reduces the maximum total attack angle increaseswhich may affect the flight stability of trajectory correctionrockets
Based on the above discussion some suggestions are putforward to determine the thruster configuration parametersof trajectory correction rockets Firstly the total impulseshould be determined according to CEP needed because theimpact point dispersion is mainly influenced by the totalimpulse of lateral thrusters deployed Secondly individualthruster impulse should be determined according to the totalimpulse limits of layout space on the rocket flight stability ofrockets cost and so forth If the individual thruster impulseis too small there may be too many thrusters needed to bemounted on the rocket On the other hand if the individual
thruster impulse is too large the flight stability may deterio-rate Thirdly the minimum firing interval should be deter-mined according to the individual thruster impulse flightstability of rockets correction efficiency of thrusters and soforth If the individual thruster impulse is large a relativelylarge minimum firing interval should be set to guarantee theflight stability of rockets If the individual thruster impulse issmall a relatively small minimum firing interval time shouldbe set to insure thrusters can be activated at the segment oftrajectory while the correction efficiency is higher
Live experiments have been done to verify the effec-tiveness of the firing control scheme The characters of thetrajectory correction rockets (TCR) have been launched sameas the rocket described in simulations above Two TCRshave been launched toward a target on the ground withaltitude equal to 200m and cross range equal to zero at arange of 28000m the launching elevation angle was set to436 deg according to theweather of the time Figure 11 showsthe trajectory of two TCRs contrasted with the nominaltrajectory As shown in Figure 11(a) at the ballistic vertex theattitude of two TCRs is 300sim400m higher than the nominaltrajectory then the trajectory of two TCRs gradually closeto the nominal trajectory under the effect of flight controlsystem As shown in Figure 11(b) the cross range of thetwo TCRs gradually closes to the nominal trajectory underthe effect of flight control system The final impact pointdeviation of TCR1 is (45 212) and the final impact pointdeviation of TCR2 is (minus283 354) which demonstrates thefiring control scheme works effectively
7 Conclusion
This paper establishes the 6-DOF trajectorymodel of a rocketwith lateral force and presents an optimum control schemeof firing time and firing phase angle by taking impact point
International Journal of Aerospace Engineering 11
deviation as optimumobjective functionwhich takes accountof the difference of longitudinal and horizontal correctionefficiency firing delay roll rate flight stability and so forthThe result of Monte Carlo simulations shows that the uncon-trolled rockets have a CEP of 359m the CEPwas improved to38mwith the general firing control scheme as a contrast theCEP was improved to 20m with the optimum firing controlscheme The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of CEP and thereduction of thruster consumption testify the effectiveness offiring control optimization The variations of rocket impactpoint dispersion are analyzed with different impulse andnumber of impulse thrusters It is shown that the impactpoint dispersion is mainly influenced by the total impulseof impulse thrusters deployed and steadily decreases as thetotal impulse is increased The impulse number and firinginterval need to be optimized to insure the flight stabilityof rockets and impulse thrusters activated at time whenthe correction efficiency is higher Two trajectory correctionrockets have been launched to verify the effectiveness of thefiring control scheme the final impact point deviations of twotrajectory correction rockets are respectively (45 212) and(minus283 354) which demonstrates the firing control schemeworks effectively
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] M Costello ldquoExtended range of a gun launched smart projectileusing controllable canardsrdquo Shock and Vibration vol 8 no 3-4pp 203ndash213 2001
[2] J Rogers and M Costello ldquoDesign of a roll-stabilized mortarprojectile with reciprocating canardsrdquo Journal of GuidanceControl and Dynamics vol 33 no 4 pp 1026ndash1034 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofan asymmetric projectile with activating canardsrdquo Journal ofSpacecraft and Rockets vol 49 no 1 pp 130ndash135 2012
[4] M Costello and A Peterson ldquoLinear theory of a dual-spinprojectile in atmospheric flightrdquo Journal of Guidance Controland Dynamics vol 23 no 5 pp 789ndash797 2000
[5] A Elsaadany and Y Wen-Jun ldquoAccuracy improvement capa-bility of advanced projectile based on course correction fuzeconceptrdquo The Scientific World Journal vol 2014 Article ID273450 10 pages 2014
[6] M Amitay D R Smith V Kibens D E Parekh and A GlezerldquoAerodynamic flow control over an unconventional airfoil usingsynthetic jet actuatorsrdquoAIAA journal vol 39 no 3 pp 361ndash3702001
[7] M S L Hollis and F J Brandon ldquoRange correction module fora spin stabilized projectilerdquo US Patent Documents US-58165311998
[8] M S L Hollis and F J Brandon ldquoDesign and analysis of afuze-configurable range correction device for an artillery pro-jectilerdquo Report ARL-TR-2074 US Army Research LaboratoryAberdeen Proving Ground Aberdeen Md USA 1999
[9] J Brandeis and J Gill ldquoExperimental investigation of super- andhypersonic jet interaction on missile configurationsrdquo Journal ofSpacecraft and Rockets vol 35 no 3 pp 296ndash302 1998
[10] B Burchett A Peterson and M Costello ldquoPrediction ofswerving motion of a dual-spin projectile with lateral pulse jetsin atmospheric flightrdquo Mathematical and Computer Modellingvol 35 no 7-8 pp 821ndash834 2002
[11] D Corriveau P Wey and C Berner ldquoThrusters pairing guide-lines for trajectory corrections of projectilesrdquo Journal of Guid-ance Control and Dynamics vol 34 no 4 pp 1120ndash1128 2011
[12] T Harkins and T Brown ldquoUsing active damping as a precision-enhancing technology for 275-inch rocketsrdquo Tech Rep ARL-TR-1772 US Army Research Laboratory Aberdeen Md USA1999
[13] T Jitpraphai and M Costello ldquoDispersion reduction of a directfire rocket using lateral pulse jetsrdquo Journal of Spacecraft andRockets vol 38 no 6 pp 929ndash936 2001
[14] B Burchett and M Costello ldquoModel predictive lateral pulse jetcontrol of an atmospheric rocketrdquo Journal of Guidance Controland Dynamics vol 25 no 5 pp 860ndash867 2002
[15] S K Gupta S Saxena A Singhal and A K Ghosh ldquoTrajectorycorrection flight control system using pulsejet on an artilleryrocketrdquo Defence Science Journal vol 58 no 1 pp 15ndash33 2008
[16] B Pavkovic M Pavic and D Cuk ldquoFrequency-modulatedpulse-jet control of an artillery rocketrdquo Journal of Spacecraft andRockets vol 49 no 2 pp 286ndash294 2012
[17] B Pavkovic M Pavic and D Cuk ldquoEnhancing the precisionof artillery rockets using pulsejet control systems with activedampingrdquo Scientific Technical Review vol 62 no 2 pp 10ndash192012
[18] H-W Yang L-H Dou and M-G Gan ldquoControl method ofimpulse actuator of antiaircraft trajectory correction projectilerdquoTransaction of Beijing Institute of Technology vol 31 no 10 pp1184ndash1188 2011
[19] Y-J Cao S-X Yang and X-J Li ldquoResearch on firing phaseangle optimization of terminal trajectory correction projectilebased on pulse jet controlrdquo Acta Armamentarii vol 29 no 8pp 897ndash901 2008
[20] F Gao and H Zhang ldquoStudy of 2-D trajectory correction basedon geomagnetic detection with impulse force for projectilesrdquoJournal of System Simulation vol 23 no 1 pp 123ndash128 2011
[21] X Qian R Lin and Y Zhao Aerothermodynamics of MissileFlight Beijing Institute of Technology Press Beijing China2008
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 5
[1205791 1205792]i = 1
i lt N120579m = (1205791 + 1205792)2
End
i++
AM(1205791) lt AM(1205792)1205792 = 1205792
1205791 = (1205791 + 1205792)2
1205791 = 12057911205792 = (1205791 + 1205792)2
No
No
Yes
Yes
Figure 4 Solution flow of 120579119898
y4
z4Φc
180∘
270∘
120579m
120591
w
120591d
T
Figure 5 Schematic of firing phase angle
In (10) 120591119889is the firing delay and 120591 is a half of the impulse
duration 120596 is the roll angular rate of rocketWhen the phase angle Φ of the impulse thruster that will
be activated is equal to the firing phase angle the impulsethruster can be activated the condition to activate an impulsethruster is
1003816100381610038161003816Φ minus Φ119888
1003816100381610038161003816 le 120576 (11)
In (11) 120576 is the desired activation threshold
5 Optimization of Firing Time
After the optimization of firing phase angle the otheroptimization variable of objective function is the firing time
of thrustersThe general firing time control algorithmhas twostrategies
(1) Time elapsed from the previous impulse thruster firingmust be longer than a specified time duration Δ119905fire
119905 minus 119905lowast
gt Δ119905fire (12)
In (12) 119905lowast is the firing time of the previous impulse thruster(2) If predicted impact point deviation is greater than a
specified distance activate the thruster as soon as possibleΔ119905fire is an important design parameter of thrusters If
it is set too low the rocket does not have sufficient timeto respond and too many thrusters will be fired tending toovercompensate for trajectory deviation Simultaneously alower Δ119905fire may have an impact on the flight stability of therocket On the other hand if it is set too high only a smallnumber of thrusters can possibly be fired and the capabilitiesof the residual impulse thrusters will be wasted
The impact of flight time on trajectory correction perfor-mance of thrusters is not considered by strategy (2) whichmay lead to the thrusters being activated at the time whenthe correction efficiency is lower Gao and Zhang [20] gavethe conclusion that the longitudinal correction efficiencyof thrusters is lower in ballistic ascending segment of therocket and longitudinal and horizontal correction efficiencyreduces with the decrease of time to go in ballistic descendingsegment Simulation results of converting coefficients of arocket are shown in Figure 6 the launch angle of the rocketis 45 deg and the impact angle is minus64 deg
As shown in Figure 6 119896119909and 119896
119911have different change
trends and 119896119909increases gradually in ballistic ascending
segment and decreases gradually in ballistic descendingsegment while the 119896
119911decreases gradually with the decrease
of time to goThe behavior of 119896119909and 119896119911has a physical reason
According to the kinetic energy theorem the rocket willget a velocity increment Δ119881 when an impulse thruster wasactivated the direction of Δ119881 is nearly perpendicular to thevelocity direction of rocket When an impulse thruster wasactivated for longitudinal correctionΔ119881 can be decomposedinto Δ119881
119909and Δ119881
119911 as shown in Figure 7 supposing that the
lateral force of the impulse thruster is upward then Δ119881119910
=
Δ119881 cos(1205791015840) andΔ119881119909= minusΔ119881 sin(1205791015840) where 1205791015840 denotes the tra-
jectory incline angle In ballistic ascending segment 1205791015840 gt 0so Δ119881
119909lt 0 which will shorten the rocket range while Δ119881
119910gt
0 which will extend the rocket range the impact of Δ119881119909
and Δ119881119910is contradictory and therefore the impact of Δ119881 is
relatively small at the beginning of ballistic descending seg-ment As the trajectory inclination angle ranges from 45 degto 0 deg the absolute value of Δ119881
119910increases gradually while
the absolute value of Δ119881119909decreases gradually as a result the
longitudinal correction distance of a thruster increases grad-ually in ballistic ascending segment In ballistic descendingsegment trajectory inclination angle ranges from 0 deg tominus64 deg so Δ119881
119909gt 0 which will extend the rocket range and
Δ119881119910
gt 0 which will also extend the rocket range the longi-tudinal correction distance is mainly influenced by the timeto go therefore longitudinal correction distance of a thrusterdecreases gradually with the decrease of time to go in ballisticdescending segment In the horizontal plane Δ119881
119911asymp Δ119881
6 International Journal of Aerospace Engineering
16
14
12
10
08
06
04
02
00
0 10 20 30 40 50 60 70 80 90
t (s)
Con
vert
ing
coeffi
cien
ts
Kz
Kx
Figure 6 Converting coefficients versus flight time
ΔV VΔVy
ΔVx
V
ΔVy
ΔVx
ΔV
x
y
o
120579998400
Figure 7 Schematic of velocity increment of a thruster
the horizontal correction distance is mainly influenced bythe time to go and hence the horizontal correction distancedecreases gradually with the decrease of time to goTherefore119896119909and 119896119911have the change trends shown in Figure 6
It can be known from (6) and Figure 6 that the value ofthe objective function (activated at the optimized firing phaseangle) tends to increase in ballistic descending segmentSupposing that 119905
119896is the time of ballistic vertex the value of
the objective function at 119905119896can be taken as a reference value
denoted by119860119872(119905119896) In ballistic ascending segment thrusters
can be activated if the value of the objective function is lessthan the reference value119860119872(119905
119896) otherwise they cannotThis
method can guarantee that thrusters are activated at the timewhen correction efficiency is higher especially in the ballisticascending segment
To sum up the firing time control algorithm can beimproved as the following equation
119905 minus 119905lowast
gt Δ119905fire
119860119872 (119905) lt 119860119872(119905119896) 119905 lt 119905
119896
119860119872 (119905) lt 119874119872(119905) 119905 ge 119905119896
(13)
In (13) 119905119896is the time of ballistic vertex
6 Results and Discussion
To investigate the correction performance of impulse thru-sters and verify the effectiveness of the firing control schemesome simulations of a rocket have been done by numericalintegration of the equations described above using a fourth-order Runge-Kutta algorithmThe rocket configuration usedin the simulation study is a representative 122mm artilleryrocket 299m long fin-stabilized with four pop-out fins onits rear part The main rocket motor burns for 255 s andimparts an impulse of 54247N-s to the rocket During themain rocket motor burns the forward velocity of the rocketis increased from 469ms to 9357ms The rocket weightmass center location from the nose tip roll inertia andpitch inertia before and after burn is 661430 kg 143121m016012 kg-m2 and 48423636 kg-m2 respectively Therocket is launched at sea level toward a target on the groundwith altitude and cross range equal to zero at a range of28000m The thruster ring is assumed to be located at0869m from the nose tip of the rocket and contains 50individual thrusters where each individual thruster impartsan impulse of 15N-s on the rocket body over a time durationof 002 sTheminimum firing interval of thrusters Δ119905fire is setto 02 s The desired activation threshold 120576 is set to 3 deg
The time-varying data of uncontrolled and controlledtrajectories with optimum firing control scheme against anominal command trajectory for the example rocket arecompared in Figure 8
Figure 8(a) plots the total number of thrusters fired versustime Five thrusters are fired in 10sim15 s and 43 thrustersare fired in 45sim70 s No thrusters are fired in 15sim45 s whichindicates that the correction efficiency is relatively low duringthis period No thrusters are fired after 70 s because thepredicted impact point deviation is too small to implementany trajectory correction The activation of thrusters willarouse the increase of attack angle of rocket as shown inFigure 8(b)
It can be known from Figures 8(c) and 8(d) that thepredicted longitudinal and horizontal impact point devia-tions reduce graduallyThe horizontal impact point deviationreduces quickly while longitudinal impact point deviationhas no significant change in 10sim20 s which indicates that thethrusters fired in this period are mainly used for horizontalcorrection corresponding to the fact that the horizontalcorrection efficiency of thrusters in this period is higher(119896119911is greater referencing to Figure 6) Both horizontal and
longitudinal impact point deviations reduce quickly in 45sim70 s which indicates that thrusters fired in this periodare used for both horizontal and longitudinal correctioncorresponding to the fact that the horizontal and longitudinalcorrection efficiency in this period is similar (119896
119909asymp 119896119911)
Figures 8(e) and 8(f) show that the trajectory correctionrocket flights to target point gradually under the effect ofthrusters The final impact point deviation of the rocket wasreduced from horizontal 3413m and longitudinal 4833m inthe uncontrolled case to horizontal 109m and longitudinal159m in the controlled case which demonstrates that thefiring control scheme works effectively
International Journal of Aerospace Engineering 7
60
50
40
30
20
10
0
minus100 20 40 60 80 100
Num
ber o
f im
pulse
thru
sters
fire
d
t (s)
(a) Total number of thrusters tired versus time
0 20 40 60 80 100
t (s)
Tota
l atta
ck an
gle (
deg)
16
14
12
10
08
06
04
02
00
minus02
(b) Total attack angle versus time
0 20 40 60 80 100
t (s)
500
400
300
200
100
0
minus100
minus200
Hor
izon
tal i
mpa
ct p
oint
dev
iatio
n (m
)
(c) Horizontal impact point deviation versus time
0 20 40 60 80 100
t (s)
Long
itudi
nal i
mpa
ct p
oint
dev
iatio
n (m
)600
400
200
0
(d) Longitudinal impact point deviation versus time
UncontrolledControlled
350
300
250
200
150
100
50
0
z(m
)
x (km)0 5 10 15 20 25 30
Target
+
(e) Cross range versus range
y(k
m)
x (km)0 5 10 15 20 25 30
Target
10
8
6
4
2
0
UncontrolledControlled
+
(f) Attitude versus range
Figure 8 Correction performance of the optimum firing control scheme
8 International Journal of Aerospace Engineering
600
400
200
0
minus200
minus400
minus600
minus1500 minus1000 minus500 0 500 1000 1500
Rang
e miss
(m)
Cross-range miss (m)
CEP = 359m
(a) Impact point distribution of uncontrolled rockets
Cross-range miss (m)
400
300
200
100
0
minus100
minus200
minus300minus100 0 100 200 300
Rang
e miss
(m)
CEP = 38m
(b) Impact point distribution of rockets with general firing controlscheme
Cross-range miss (m)
Rang
e miss
(m)
CEP = 20m300
200
100
0
minus100
minus200
minus300
minus50 0 50 100 150 200 250 300
(c) Impact point distribution of rockets with the optimum firingcontrol scheme
Figure 9 Impact point distribution
Figure 9 shows the impact point distribution using theMonte Carlo method The cases of the uncontrolled rocketsas well as of the rockets with general firing control schemeand optimum firing control scheme are shown The analysiswas performed for a statistical sample of 1024 simulationsAll initial conditions were modeled as Gaussian randomvariables with mean values and standard deviations givenin Table 1 Wind direction is a uniform random variablebetween 0 and 2120587 The nominal launching elevation angle is4231 deg but the mean value of launching elevation angleis set as 4251 deg a launching elevation angle error about02 deg and a launching azimuth angle error about 01 degwere introduced to simulate the accuracy errors of rockets
The result of Monte Carlo simulations is shown inFigure 9 for uncontrolled rockets the max value of rangemiss is 5892m while the min value of range miss is minus4219the mean value of range miss is 955 the max value of crossrange miss is 13498 while the min value of cross range
Table 1 Initial conditions and disturbances
Parameter Unit Mean value Standard deviationLaunching elevationangle deg 4251 02
Launching azimuthangle deg 01 02
Impulse of the mainrocket motor 100 01
Wind ms 0 2
miss is minus10636 the mean value of cross range miss is 438there are more points in the first quadrant (right upper side)of the plane coordinate system as shown in Figure 9(a)and the CEP of uncontrolled rockets is 359m Impact pointdistribution of the trajectory correction rockets reducesgreatly as shown in Figures 9(b) and 9(c) The rockets with
International Journal of Aerospace Engineering 9
400
350
300
250
200
150
100
50
0
0 10 20 30 40 50
Number of impulse thrusters
CEP
(m)
30N-s20N-s10N-s
(a) CEP versus number of thrusters and individual thruster impulse
400
350
300
250
200
150
100
50
0
CEP
(m)
0 200 400 600 800 1000
Total impulse (N-s)
30N-s20N-s10N-s
(b) CEP versus total impulse of thrusters and individual thrusterimpulse
9
8
7
6
5
4
3
2
1
5 10 15 20 25 30
Max
imal
tota
l atta
ck an
gle (
deg)
Individual thruster impulse (N-s)
100ms200ms300ms
(c) Maximal total attack angle versus individual thruster impulse andminimum firing interval
Figure 10 The impact of parameters of thrusters on CEP and flight stability of rockets
the general firing control scheme have a CEP of 38m whilethe CEP of rockets with the optimum firing control schemeis 20m The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of impact pointdispersion of rockets and the reduction of thruster consump-tion testify the effectiveness of firing control optimization
Figure 10 shows the impact of thruster parameters onthe CEP and flight stability of rockets Figure 10(a) shows
the relation between CEP of rockets number of thrustersmounted on rocket and individual thruster impulse It canbe known that the CEP of rockets is highly correlated withthe number of thrusters and individual thruster impulse andCEP reduces steadily as the number of thrusters or individualthruster impulse is increased
Figure 10(b) shows the relationship between CEP ofrockets individual thruster impulse and the total impulseof thrusters For a value of the total impulse as the individ-ual thruster impulse is increased the number of thrustersdecreases proportionally for the total impulse to remain as
10 International Journal of Aerospace Engineering
0 5 10 15 20 25 30
0
2
4
6
8
10
Nominal trajectoryTCR1TCR2
minus2
y(k
m)
x (km)
(a) Attitude versus range
0 5 10 15 20 25 30
0
50
100
Nominal trajectoryTCR1TCR2
x (km)
minus50
minus100
minus150
minus200
minus250
minus300
z(m
)(b) Cross range versus range
Figure 11 The trajectory of two TCRs
a constant As shown in Figure 10(b) the evolution of thethree curves is similar when the thruster impulse is smallthe number of thrusters is large and some thrusters willbe activated at time when the correction efficiency is lowerwhich is the unfavorable aspect for trajectory correctionhowever large thruster number means more correctionopportunity and the correction precision of a small thrusterimpulse is higher which is the favorable aspect for trajectorycorrection these two aspects are contradictory the combinedeffect of these two aspects leads to the similar evolution ofthe three curves The result indicates that CEP is mainlyinfluenced by the total impulse when the individual thrusterimpulse is reasonable CEP reduces gradually as the totalimpulse is increased and the value of individual thrusterimpulse has a small impact on CEP
Figure 10(c) shows the relationship between maximumtotal attack angle individual thruster impulse and theminimum firing interval (Δ119905fire) The results indicate thatindividual thruster impulse and minimum firing intervalhave a direct impact on the maximum total attack angleas individual thruster impulse increases or minimum firinginterval reduces the maximum total attack angle increaseswhich may affect the flight stability of trajectory correctionrockets
Based on the above discussion some suggestions are putforward to determine the thruster configuration parametersof trajectory correction rockets Firstly the total impulseshould be determined according to CEP needed because theimpact point dispersion is mainly influenced by the totalimpulse of lateral thrusters deployed Secondly individualthruster impulse should be determined according to the totalimpulse limits of layout space on the rocket flight stability ofrockets cost and so forth If the individual thruster impulseis too small there may be too many thrusters needed to bemounted on the rocket On the other hand if the individual
thruster impulse is too large the flight stability may deterio-rate Thirdly the minimum firing interval should be deter-mined according to the individual thruster impulse flightstability of rockets correction efficiency of thrusters and soforth If the individual thruster impulse is large a relativelylarge minimum firing interval should be set to guarantee theflight stability of rockets If the individual thruster impulse issmall a relatively small minimum firing interval time shouldbe set to insure thrusters can be activated at the segment oftrajectory while the correction efficiency is higher
Live experiments have been done to verify the effec-tiveness of the firing control scheme The characters of thetrajectory correction rockets (TCR) have been launched sameas the rocket described in simulations above Two TCRshave been launched toward a target on the ground withaltitude equal to 200m and cross range equal to zero at arange of 28000m the launching elevation angle was set to436 deg according to theweather of the time Figure 11 showsthe trajectory of two TCRs contrasted with the nominaltrajectory As shown in Figure 11(a) at the ballistic vertex theattitude of two TCRs is 300sim400m higher than the nominaltrajectory then the trajectory of two TCRs gradually closeto the nominal trajectory under the effect of flight controlsystem As shown in Figure 11(b) the cross range of thetwo TCRs gradually closes to the nominal trajectory underthe effect of flight control system The final impact pointdeviation of TCR1 is (45 212) and the final impact pointdeviation of TCR2 is (minus283 354) which demonstrates thefiring control scheme works effectively
7 Conclusion
This paper establishes the 6-DOF trajectorymodel of a rocketwith lateral force and presents an optimum control schemeof firing time and firing phase angle by taking impact point
International Journal of Aerospace Engineering 11
deviation as optimumobjective functionwhich takes accountof the difference of longitudinal and horizontal correctionefficiency firing delay roll rate flight stability and so forthThe result of Monte Carlo simulations shows that the uncon-trolled rockets have a CEP of 359m the CEPwas improved to38mwith the general firing control scheme as a contrast theCEP was improved to 20m with the optimum firing controlscheme The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of CEP and thereduction of thruster consumption testify the effectiveness offiring control optimization The variations of rocket impactpoint dispersion are analyzed with different impulse andnumber of impulse thrusters It is shown that the impactpoint dispersion is mainly influenced by the total impulseof impulse thrusters deployed and steadily decreases as thetotal impulse is increased The impulse number and firinginterval need to be optimized to insure the flight stabilityof rockets and impulse thrusters activated at time whenthe correction efficiency is higher Two trajectory correctionrockets have been launched to verify the effectiveness of thefiring control scheme the final impact point deviations of twotrajectory correction rockets are respectively (45 212) and(minus283 354) which demonstrates the firing control schemeworks effectively
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] M Costello ldquoExtended range of a gun launched smart projectileusing controllable canardsrdquo Shock and Vibration vol 8 no 3-4pp 203ndash213 2001
[2] J Rogers and M Costello ldquoDesign of a roll-stabilized mortarprojectile with reciprocating canardsrdquo Journal of GuidanceControl and Dynamics vol 33 no 4 pp 1026ndash1034 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofan asymmetric projectile with activating canardsrdquo Journal ofSpacecraft and Rockets vol 49 no 1 pp 130ndash135 2012
[4] M Costello and A Peterson ldquoLinear theory of a dual-spinprojectile in atmospheric flightrdquo Journal of Guidance Controland Dynamics vol 23 no 5 pp 789ndash797 2000
[5] A Elsaadany and Y Wen-Jun ldquoAccuracy improvement capa-bility of advanced projectile based on course correction fuzeconceptrdquo The Scientific World Journal vol 2014 Article ID273450 10 pages 2014
[6] M Amitay D R Smith V Kibens D E Parekh and A GlezerldquoAerodynamic flow control over an unconventional airfoil usingsynthetic jet actuatorsrdquoAIAA journal vol 39 no 3 pp 361ndash3702001
[7] M S L Hollis and F J Brandon ldquoRange correction module fora spin stabilized projectilerdquo US Patent Documents US-58165311998
[8] M S L Hollis and F J Brandon ldquoDesign and analysis of afuze-configurable range correction device for an artillery pro-jectilerdquo Report ARL-TR-2074 US Army Research LaboratoryAberdeen Proving Ground Aberdeen Md USA 1999
[9] J Brandeis and J Gill ldquoExperimental investigation of super- andhypersonic jet interaction on missile configurationsrdquo Journal ofSpacecraft and Rockets vol 35 no 3 pp 296ndash302 1998
[10] B Burchett A Peterson and M Costello ldquoPrediction ofswerving motion of a dual-spin projectile with lateral pulse jetsin atmospheric flightrdquo Mathematical and Computer Modellingvol 35 no 7-8 pp 821ndash834 2002
[11] D Corriveau P Wey and C Berner ldquoThrusters pairing guide-lines for trajectory corrections of projectilesrdquo Journal of Guid-ance Control and Dynamics vol 34 no 4 pp 1120ndash1128 2011
[12] T Harkins and T Brown ldquoUsing active damping as a precision-enhancing technology for 275-inch rocketsrdquo Tech Rep ARL-TR-1772 US Army Research Laboratory Aberdeen Md USA1999
[13] T Jitpraphai and M Costello ldquoDispersion reduction of a directfire rocket using lateral pulse jetsrdquo Journal of Spacecraft andRockets vol 38 no 6 pp 929ndash936 2001
[14] B Burchett and M Costello ldquoModel predictive lateral pulse jetcontrol of an atmospheric rocketrdquo Journal of Guidance Controland Dynamics vol 25 no 5 pp 860ndash867 2002
[15] S K Gupta S Saxena A Singhal and A K Ghosh ldquoTrajectorycorrection flight control system using pulsejet on an artilleryrocketrdquo Defence Science Journal vol 58 no 1 pp 15ndash33 2008
[16] B Pavkovic M Pavic and D Cuk ldquoFrequency-modulatedpulse-jet control of an artillery rocketrdquo Journal of Spacecraft andRockets vol 49 no 2 pp 286ndash294 2012
[17] B Pavkovic M Pavic and D Cuk ldquoEnhancing the precisionof artillery rockets using pulsejet control systems with activedampingrdquo Scientific Technical Review vol 62 no 2 pp 10ndash192012
[18] H-W Yang L-H Dou and M-G Gan ldquoControl method ofimpulse actuator of antiaircraft trajectory correction projectilerdquoTransaction of Beijing Institute of Technology vol 31 no 10 pp1184ndash1188 2011
[19] Y-J Cao S-X Yang and X-J Li ldquoResearch on firing phaseangle optimization of terminal trajectory correction projectilebased on pulse jet controlrdquo Acta Armamentarii vol 29 no 8pp 897ndash901 2008
[20] F Gao and H Zhang ldquoStudy of 2-D trajectory correction basedon geomagnetic detection with impulse force for projectilesrdquoJournal of System Simulation vol 23 no 1 pp 123ndash128 2011
[21] X Qian R Lin and Y Zhao Aerothermodynamics of MissileFlight Beijing Institute of Technology Press Beijing China2008
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Aerospace Engineering
16
14
12
10
08
06
04
02
00
0 10 20 30 40 50 60 70 80 90
t (s)
Con
vert
ing
coeffi
cien
ts
Kz
Kx
Figure 6 Converting coefficients versus flight time
ΔV VΔVy
ΔVx
V
ΔVy
ΔVx
ΔV
x
y
o
120579998400
Figure 7 Schematic of velocity increment of a thruster
the horizontal correction distance is mainly influenced bythe time to go and hence the horizontal correction distancedecreases gradually with the decrease of time to goTherefore119896119909and 119896119911have the change trends shown in Figure 6
It can be known from (6) and Figure 6 that the value ofthe objective function (activated at the optimized firing phaseangle) tends to increase in ballistic descending segmentSupposing that 119905
119896is the time of ballistic vertex the value of
the objective function at 119905119896can be taken as a reference value
denoted by119860119872(119905119896) In ballistic ascending segment thrusters
can be activated if the value of the objective function is lessthan the reference value119860119872(119905
119896) otherwise they cannotThis
method can guarantee that thrusters are activated at the timewhen correction efficiency is higher especially in the ballisticascending segment
To sum up the firing time control algorithm can beimproved as the following equation
119905 minus 119905lowast
gt Δ119905fire
119860119872 (119905) lt 119860119872(119905119896) 119905 lt 119905
119896
119860119872 (119905) lt 119874119872(119905) 119905 ge 119905119896
(13)
In (13) 119905119896is the time of ballistic vertex
6 Results and Discussion
To investigate the correction performance of impulse thru-sters and verify the effectiveness of the firing control schemesome simulations of a rocket have been done by numericalintegration of the equations described above using a fourth-order Runge-Kutta algorithmThe rocket configuration usedin the simulation study is a representative 122mm artilleryrocket 299m long fin-stabilized with four pop-out fins onits rear part The main rocket motor burns for 255 s andimparts an impulse of 54247N-s to the rocket During themain rocket motor burns the forward velocity of the rocketis increased from 469ms to 9357ms The rocket weightmass center location from the nose tip roll inertia andpitch inertia before and after burn is 661430 kg 143121m016012 kg-m2 and 48423636 kg-m2 respectively Therocket is launched at sea level toward a target on the groundwith altitude and cross range equal to zero at a range of28000m The thruster ring is assumed to be located at0869m from the nose tip of the rocket and contains 50individual thrusters where each individual thruster impartsan impulse of 15N-s on the rocket body over a time durationof 002 sTheminimum firing interval of thrusters Δ119905fire is setto 02 s The desired activation threshold 120576 is set to 3 deg
The time-varying data of uncontrolled and controlledtrajectories with optimum firing control scheme against anominal command trajectory for the example rocket arecompared in Figure 8
Figure 8(a) plots the total number of thrusters fired versustime Five thrusters are fired in 10sim15 s and 43 thrustersare fired in 45sim70 s No thrusters are fired in 15sim45 s whichindicates that the correction efficiency is relatively low duringthis period No thrusters are fired after 70 s because thepredicted impact point deviation is too small to implementany trajectory correction The activation of thrusters willarouse the increase of attack angle of rocket as shown inFigure 8(b)
It can be known from Figures 8(c) and 8(d) that thepredicted longitudinal and horizontal impact point devia-tions reduce graduallyThe horizontal impact point deviationreduces quickly while longitudinal impact point deviationhas no significant change in 10sim20 s which indicates that thethrusters fired in this period are mainly used for horizontalcorrection corresponding to the fact that the horizontalcorrection efficiency of thrusters in this period is higher(119896119911is greater referencing to Figure 6) Both horizontal and
longitudinal impact point deviations reduce quickly in 45sim70 s which indicates that thrusters fired in this periodare used for both horizontal and longitudinal correctioncorresponding to the fact that the horizontal and longitudinalcorrection efficiency in this period is similar (119896
119909asymp 119896119911)
Figures 8(e) and 8(f) show that the trajectory correctionrocket flights to target point gradually under the effect ofthrusters The final impact point deviation of the rocket wasreduced from horizontal 3413m and longitudinal 4833m inthe uncontrolled case to horizontal 109m and longitudinal159m in the controlled case which demonstrates that thefiring control scheme works effectively
International Journal of Aerospace Engineering 7
60
50
40
30
20
10
0
minus100 20 40 60 80 100
Num
ber o
f im
pulse
thru
sters
fire
d
t (s)
(a) Total number of thrusters tired versus time
0 20 40 60 80 100
t (s)
Tota
l atta
ck an
gle (
deg)
16
14
12
10
08
06
04
02
00
minus02
(b) Total attack angle versus time
0 20 40 60 80 100
t (s)
500
400
300
200
100
0
minus100
minus200
Hor
izon
tal i
mpa
ct p
oint
dev
iatio
n (m
)
(c) Horizontal impact point deviation versus time
0 20 40 60 80 100
t (s)
Long
itudi
nal i
mpa
ct p
oint
dev
iatio
n (m
)600
400
200
0
(d) Longitudinal impact point deviation versus time
UncontrolledControlled
350
300
250
200
150
100
50
0
z(m
)
x (km)0 5 10 15 20 25 30
Target
+
(e) Cross range versus range
y(k
m)
x (km)0 5 10 15 20 25 30
Target
10
8
6
4
2
0
UncontrolledControlled
+
(f) Attitude versus range
Figure 8 Correction performance of the optimum firing control scheme
8 International Journal of Aerospace Engineering
600
400
200
0
minus200
minus400
minus600
minus1500 minus1000 minus500 0 500 1000 1500
Rang
e miss
(m)
Cross-range miss (m)
CEP = 359m
(a) Impact point distribution of uncontrolled rockets
Cross-range miss (m)
400
300
200
100
0
minus100
minus200
minus300minus100 0 100 200 300
Rang
e miss
(m)
CEP = 38m
(b) Impact point distribution of rockets with general firing controlscheme
Cross-range miss (m)
Rang
e miss
(m)
CEP = 20m300
200
100
0
minus100
minus200
minus300
minus50 0 50 100 150 200 250 300
(c) Impact point distribution of rockets with the optimum firingcontrol scheme
Figure 9 Impact point distribution
Figure 9 shows the impact point distribution using theMonte Carlo method The cases of the uncontrolled rocketsas well as of the rockets with general firing control schemeand optimum firing control scheme are shown The analysiswas performed for a statistical sample of 1024 simulationsAll initial conditions were modeled as Gaussian randomvariables with mean values and standard deviations givenin Table 1 Wind direction is a uniform random variablebetween 0 and 2120587 The nominal launching elevation angle is4231 deg but the mean value of launching elevation angleis set as 4251 deg a launching elevation angle error about02 deg and a launching azimuth angle error about 01 degwere introduced to simulate the accuracy errors of rockets
The result of Monte Carlo simulations is shown inFigure 9 for uncontrolled rockets the max value of rangemiss is 5892m while the min value of range miss is minus4219the mean value of range miss is 955 the max value of crossrange miss is 13498 while the min value of cross range
Table 1 Initial conditions and disturbances
Parameter Unit Mean value Standard deviationLaunching elevationangle deg 4251 02
Launching azimuthangle deg 01 02
Impulse of the mainrocket motor 100 01
Wind ms 0 2
miss is minus10636 the mean value of cross range miss is 438there are more points in the first quadrant (right upper side)of the plane coordinate system as shown in Figure 9(a)and the CEP of uncontrolled rockets is 359m Impact pointdistribution of the trajectory correction rockets reducesgreatly as shown in Figures 9(b) and 9(c) The rockets with
International Journal of Aerospace Engineering 9
400
350
300
250
200
150
100
50
0
0 10 20 30 40 50
Number of impulse thrusters
CEP
(m)
30N-s20N-s10N-s
(a) CEP versus number of thrusters and individual thruster impulse
400
350
300
250
200
150
100
50
0
CEP
(m)
0 200 400 600 800 1000
Total impulse (N-s)
30N-s20N-s10N-s
(b) CEP versus total impulse of thrusters and individual thrusterimpulse
9
8
7
6
5
4
3
2
1
5 10 15 20 25 30
Max
imal
tota
l atta
ck an
gle (
deg)
Individual thruster impulse (N-s)
100ms200ms300ms
(c) Maximal total attack angle versus individual thruster impulse andminimum firing interval
Figure 10 The impact of parameters of thrusters on CEP and flight stability of rockets
the general firing control scheme have a CEP of 38m whilethe CEP of rockets with the optimum firing control schemeis 20m The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of impact pointdispersion of rockets and the reduction of thruster consump-tion testify the effectiveness of firing control optimization
Figure 10 shows the impact of thruster parameters onthe CEP and flight stability of rockets Figure 10(a) shows
the relation between CEP of rockets number of thrustersmounted on rocket and individual thruster impulse It canbe known that the CEP of rockets is highly correlated withthe number of thrusters and individual thruster impulse andCEP reduces steadily as the number of thrusters or individualthruster impulse is increased
Figure 10(b) shows the relationship between CEP ofrockets individual thruster impulse and the total impulseof thrusters For a value of the total impulse as the individ-ual thruster impulse is increased the number of thrustersdecreases proportionally for the total impulse to remain as
10 International Journal of Aerospace Engineering
0 5 10 15 20 25 30
0
2
4
6
8
10
Nominal trajectoryTCR1TCR2
minus2
y(k
m)
x (km)
(a) Attitude versus range
0 5 10 15 20 25 30
0
50
100
Nominal trajectoryTCR1TCR2
x (km)
minus50
minus100
minus150
minus200
minus250
minus300
z(m
)(b) Cross range versus range
Figure 11 The trajectory of two TCRs
a constant As shown in Figure 10(b) the evolution of thethree curves is similar when the thruster impulse is smallthe number of thrusters is large and some thrusters willbe activated at time when the correction efficiency is lowerwhich is the unfavorable aspect for trajectory correctionhowever large thruster number means more correctionopportunity and the correction precision of a small thrusterimpulse is higher which is the favorable aspect for trajectorycorrection these two aspects are contradictory the combinedeffect of these two aspects leads to the similar evolution ofthe three curves The result indicates that CEP is mainlyinfluenced by the total impulse when the individual thrusterimpulse is reasonable CEP reduces gradually as the totalimpulse is increased and the value of individual thrusterimpulse has a small impact on CEP
Figure 10(c) shows the relationship between maximumtotal attack angle individual thruster impulse and theminimum firing interval (Δ119905fire) The results indicate thatindividual thruster impulse and minimum firing intervalhave a direct impact on the maximum total attack angleas individual thruster impulse increases or minimum firinginterval reduces the maximum total attack angle increaseswhich may affect the flight stability of trajectory correctionrockets
Based on the above discussion some suggestions are putforward to determine the thruster configuration parametersof trajectory correction rockets Firstly the total impulseshould be determined according to CEP needed because theimpact point dispersion is mainly influenced by the totalimpulse of lateral thrusters deployed Secondly individualthruster impulse should be determined according to the totalimpulse limits of layout space on the rocket flight stability ofrockets cost and so forth If the individual thruster impulseis too small there may be too many thrusters needed to bemounted on the rocket On the other hand if the individual
thruster impulse is too large the flight stability may deterio-rate Thirdly the minimum firing interval should be deter-mined according to the individual thruster impulse flightstability of rockets correction efficiency of thrusters and soforth If the individual thruster impulse is large a relativelylarge minimum firing interval should be set to guarantee theflight stability of rockets If the individual thruster impulse issmall a relatively small minimum firing interval time shouldbe set to insure thrusters can be activated at the segment oftrajectory while the correction efficiency is higher
Live experiments have been done to verify the effec-tiveness of the firing control scheme The characters of thetrajectory correction rockets (TCR) have been launched sameas the rocket described in simulations above Two TCRshave been launched toward a target on the ground withaltitude equal to 200m and cross range equal to zero at arange of 28000m the launching elevation angle was set to436 deg according to theweather of the time Figure 11 showsthe trajectory of two TCRs contrasted with the nominaltrajectory As shown in Figure 11(a) at the ballistic vertex theattitude of two TCRs is 300sim400m higher than the nominaltrajectory then the trajectory of two TCRs gradually closeto the nominal trajectory under the effect of flight controlsystem As shown in Figure 11(b) the cross range of thetwo TCRs gradually closes to the nominal trajectory underthe effect of flight control system The final impact pointdeviation of TCR1 is (45 212) and the final impact pointdeviation of TCR2 is (minus283 354) which demonstrates thefiring control scheme works effectively
7 Conclusion
This paper establishes the 6-DOF trajectorymodel of a rocketwith lateral force and presents an optimum control schemeof firing time and firing phase angle by taking impact point
International Journal of Aerospace Engineering 11
deviation as optimumobjective functionwhich takes accountof the difference of longitudinal and horizontal correctionefficiency firing delay roll rate flight stability and so forthThe result of Monte Carlo simulations shows that the uncon-trolled rockets have a CEP of 359m the CEPwas improved to38mwith the general firing control scheme as a contrast theCEP was improved to 20m with the optimum firing controlscheme The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of CEP and thereduction of thruster consumption testify the effectiveness offiring control optimization The variations of rocket impactpoint dispersion are analyzed with different impulse andnumber of impulse thrusters It is shown that the impactpoint dispersion is mainly influenced by the total impulseof impulse thrusters deployed and steadily decreases as thetotal impulse is increased The impulse number and firinginterval need to be optimized to insure the flight stabilityof rockets and impulse thrusters activated at time whenthe correction efficiency is higher Two trajectory correctionrockets have been launched to verify the effectiveness of thefiring control scheme the final impact point deviations of twotrajectory correction rockets are respectively (45 212) and(minus283 354) which demonstrates the firing control schemeworks effectively
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] M Costello ldquoExtended range of a gun launched smart projectileusing controllable canardsrdquo Shock and Vibration vol 8 no 3-4pp 203ndash213 2001
[2] J Rogers and M Costello ldquoDesign of a roll-stabilized mortarprojectile with reciprocating canardsrdquo Journal of GuidanceControl and Dynamics vol 33 no 4 pp 1026ndash1034 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofan asymmetric projectile with activating canardsrdquo Journal ofSpacecraft and Rockets vol 49 no 1 pp 130ndash135 2012
[4] M Costello and A Peterson ldquoLinear theory of a dual-spinprojectile in atmospheric flightrdquo Journal of Guidance Controland Dynamics vol 23 no 5 pp 789ndash797 2000
[5] A Elsaadany and Y Wen-Jun ldquoAccuracy improvement capa-bility of advanced projectile based on course correction fuzeconceptrdquo The Scientific World Journal vol 2014 Article ID273450 10 pages 2014
[6] M Amitay D R Smith V Kibens D E Parekh and A GlezerldquoAerodynamic flow control over an unconventional airfoil usingsynthetic jet actuatorsrdquoAIAA journal vol 39 no 3 pp 361ndash3702001
[7] M S L Hollis and F J Brandon ldquoRange correction module fora spin stabilized projectilerdquo US Patent Documents US-58165311998
[8] M S L Hollis and F J Brandon ldquoDesign and analysis of afuze-configurable range correction device for an artillery pro-jectilerdquo Report ARL-TR-2074 US Army Research LaboratoryAberdeen Proving Ground Aberdeen Md USA 1999
[9] J Brandeis and J Gill ldquoExperimental investigation of super- andhypersonic jet interaction on missile configurationsrdquo Journal ofSpacecraft and Rockets vol 35 no 3 pp 296ndash302 1998
[10] B Burchett A Peterson and M Costello ldquoPrediction ofswerving motion of a dual-spin projectile with lateral pulse jetsin atmospheric flightrdquo Mathematical and Computer Modellingvol 35 no 7-8 pp 821ndash834 2002
[11] D Corriveau P Wey and C Berner ldquoThrusters pairing guide-lines for trajectory corrections of projectilesrdquo Journal of Guid-ance Control and Dynamics vol 34 no 4 pp 1120ndash1128 2011
[12] T Harkins and T Brown ldquoUsing active damping as a precision-enhancing technology for 275-inch rocketsrdquo Tech Rep ARL-TR-1772 US Army Research Laboratory Aberdeen Md USA1999
[13] T Jitpraphai and M Costello ldquoDispersion reduction of a directfire rocket using lateral pulse jetsrdquo Journal of Spacecraft andRockets vol 38 no 6 pp 929ndash936 2001
[14] B Burchett and M Costello ldquoModel predictive lateral pulse jetcontrol of an atmospheric rocketrdquo Journal of Guidance Controland Dynamics vol 25 no 5 pp 860ndash867 2002
[15] S K Gupta S Saxena A Singhal and A K Ghosh ldquoTrajectorycorrection flight control system using pulsejet on an artilleryrocketrdquo Defence Science Journal vol 58 no 1 pp 15ndash33 2008
[16] B Pavkovic M Pavic and D Cuk ldquoFrequency-modulatedpulse-jet control of an artillery rocketrdquo Journal of Spacecraft andRockets vol 49 no 2 pp 286ndash294 2012
[17] B Pavkovic M Pavic and D Cuk ldquoEnhancing the precisionof artillery rockets using pulsejet control systems with activedampingrdquo Scientific Technical Review vol 62 no 2 pp 10ndash192012
[18] H-W Yang L-H Dou and M-G Gan ldquoControl method ofimpulse actuator of antiaircraft trajectory correction projectilerdquoTransaction of Beijing Institute of Technology vol 31 no 10 pp1184ndash1188 2011
[19] Y-J Cao S-X Yang and X-J Li ldquoResearch on firing phaseangle optimization of terminal trajectory correction projectilebased on pulse jet controlrdquo Acta Armamentarii vol 29 no 8pp 897ndash901 2008
[20] F Gao and H Zhang ldquoStudy of 2-D trajectory correction basedon geomagnetic detection with impulse force for projectilesrdquoJournal of System Simulation vol 23 no 1 pp 123ndash128 2011
[21] X Qian R Lin and Y Zhao Aerothermodynamics of MissileFlight Beijing Institute of Technology Press Beijing China2008
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 7
60
50
40
30
20
10
0
minus100 20 40 60 80 100
Num
ber o
f im
pulse
thru
sters
fire
d
t (s)
(a) Total number of thrusters tired versus time
0 20 40 60 80 100
t (s)
Tota
l atta
ck an
gle (
deg)
16
14
12
10
08
06
04
02
00
minus02
(b) Total attack angle versus time
0 20 40 60 80 100
t (s)
500
400
300
200
100
0
minus100
minus200
Hor
izon
tal i
mpa
ct p
oint
dev
iatio
n (m
)
(c) Horizontal impact point deviation versus time
0 20 40 60 80 100
t (s)
Long
itudi
nal i
mpa
ct p
oint
dev
iatio
n (m
)600
400
200
0
(d) Longitudinal impact point deviation versus time
UncontrolledControlled
350
300
250
200
150
100
50
0
z(m
)
x (km)0 5 10 15 20 25 30
Target
+
(e) Cross range versus range
y(k
m)
x (km)0 5 10 15 20 25 30
Target
10
8
6
4
2
0
UncontrolledControlled
+
(f) Attitude versus range
Figure 8 Correction performance of the optimum firing control scheme
8 International Journal of Aerospace Engineering
600
400
200
0
minus200
minus400
minus600
minus1500 minus1000 minus500 0 500 1000 1500
Rang
e miss
(m)
Cross-range miss (m)
CEP = 359m
(a) Impact point distribution of uncontrolled rockets
Cross-range miss (m)
400
300
200
100
0
minus100
minus200
minus300minus100 0 100 200 300
Rang
e miss
(m)
CEP = 38m
(b) Impact point distribution of rockets with general firing controlscheme
Cross-range miss (m)
Rang
e miss
(m)
CEP = 20m300
200
100
0
minus100
minus200
minus300
minus50 0 50 100 150 200 250 300
(c) Impact point distribution of rockets with the optimum firingcontrol scheme
Figure 9 Impact point distribution
Figure 9 shows the impact point distribution using theMonte Carlo method The cases of the uncontrolled rocketsas well as of the rockets with general firing control schemeand optimum firing control scheme are shown The analysiswas performed for a statistical sample of 1024 simulationsAll initial conditions were modeled as Gaussian randomvariables with mean values and standard deviations givenin Table 1 Wind direction is a uniform random variablebetween 0 and 2120587 The nominal launching elevation angle is4231 deg but the mean value of launching elevation angleis set as 4251 deg a launching elevation angle error about02 deg and a launching azimuth angle error about 01 degwere introduced to simulate the accuracy errors of rockets
The result of Monte Carlo simulations is shown inFigure 9 for uncontrolled rockets the max value of rangemiss is 5892m while the min value of range miss is minus4219the mean value of range miss is 955 the max value of crossrange miss is 13498 while the min value of cross range
Table 1 Initial conditions and disturbances
Parameter Unit Mean value Standard deviationLaunching elevationangle deg 4251 02
Launching azimuthangle deg 01 02
Impulse of the mainrocket motor 100 01
Wind ms 0 2
miss is minus10636 the mean value of cross range miss is 438there are more points in the first quadrant (right upper side)of the plane coordinate system as shown in Figure 9(a)and the CEP of uncontrolled rockets is 359m Impact pointdistribution of the trajectory correction rockets reducesgreatly as shown in Figures 9(b) and 9(c) The rockets with
International Journal of Aerospace Engineering 9
400
350
300
250
200
150
100
50
0
0 10 20 30 40 50
Number of impulse thrusters
CEP
(m)
30N-s20N-s10N-s
(a) CEP versus number of thrusters and individual thruster impulse
400
350
300
250
200
150
100
50
0
CEP
(m)
0 200 400 600 800 1000
Total impulse (N-s)
30N-s20N-s10N-s
(b) CEP versus total impulse of thrusters and individual thrusterimpulse
9
8
7
6
5
4
3
2
1
5 10 15 20 25 30
Max
imal
tota
l atta
ck an
gle (
deg)
Individual thruster impulse (N-s)
100ms200ms300ms
(c) Maximal total attack angle versus individual thruster impulse andminimum firing interval
Figure 10 The impact of parameters of thrusters on CEP and flight stability of rockets
the general firing control scheme have a CEP of 38m whilethe CEP of rockets with the optimum firing control schemeis 20m The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of impact pointdispersion of rockets and the reduction of thruster consump-tion testify the effectiveness of firing control optimization
Figure 10 shows the impact of thruster parameters onthe CEP and flight stability of rockets Figure 10(a) shows
the relation between CEP of rockets number of thrustersmounted on rocket and individual thruster impulse It canbe known that the CEP of rockets is highly correlated withthe number of thrusters and individual thruster impulse andCEP reduces steadily as the number of thrusters or individualthruster impulse is increased
Figure 10(b) shows the relationship between CEP ofrockets individual thruster impulse and the total impulseof thrusters For a value of the total impulse as the individ-ual thruster impulse is increased the number of thrustersdecreases proportionally for the total impulse to remain as
10 International Journal of Aerospace Engineering
0 5 10 15 20 25 30
0
2
4
6
8
10
Nominal trajectoryTCR1TCR2
minus2
y(k
m)
x (km)
(a) Attitude versus range
0 5 10 15 20 25 30
0
50
100
Nominal trajectoryTCR1TCR2
x (km)
minus50
minus100
minus150
minus200
minus250
minus300
z(m
)(b) Cross range versus range
Figure 11 The trajectory of two TCRs
a constant As shown in Figure 10(b) the evolution of thethree curves is similar when the thruster impulse is smallthe number of thrusters is large and some thrusters willbe activated at time when the correction efficiency is lowerwhich is the unfavorable aspect for trajectory correctionhowever large thruster number means more correctionopportunity and the correction precision of a small thrusterimpulse is higher which is the favorable aspect for trajectorycorrection these two aspects are contradictory the combinedeffect of these two aspects leads to the similar evolution ofthe three curves The result indicates that CEP is mainlyinfluenced by the total impulse when the individual thrusterimpulse is reasonable CEP reduces gradually as the totalimpulse is increased and the value of individual thrusterimpulse has a small impact on CEP
Figure 10(c) shows the relationship between maximumtotal attack angle individual thruster impulse and theminimum firing interval (Δ119905fire) The results indicate thatindividual thruster impulse and minimum firing intervalhave a direct impact on the maximum total attack angleas individual thruster impulse increases or minimum firinginterval reduces the maximum total attack angle increaseswhich may affect the flight stability of trajectory correctionrockets
Based on the above discussion some suggestions are putforward to determine the thruster configuration parametersof trajectory correction rockets Firstly the total impulseshould be determined according to CEP needed because theimpact point dispersion is mainly influenced by the totalimpulse of lateral thrusters deployed Secondly individualthruster impulse should be determined according to the totalimpulse limits of layout space on the rocket flight stability ofrockets cost and so forth If the individual thruster impulseis too small there may be too many thrusters needed to bemounted on the rocket On the other hand if the individual
thruster impulse is too large the flight stability may deterio-rate Thirdly the minimum firing interval should be deter-mined according to the individual thruster impulse flightstability of rockets correction efficiency of thrusters and soforth If the individual thruster impulse is large a relativelylarge minimum firing interval should be set to guarantee theflight stability of rockets If the individual thruster impulse issmall a relatively small minimum firing interval time shouldbe set to insure thrusters can be activated at the segment oftrajectory while the correction efficiency is higher
Live experiments have been done to verify the effec-tiveness of the firing control scheme The characters of thetrajectory correction rockets (TCR) have been launched sameas the rocket described in simulations above Two TCRshave been launched toward a target on the ground withaltitude equal to 200m and cross range equal to zero at arange of 28000m the launching elevation angle was set to436 deg according to theweather of the time Figure 11 showsthe trajectory of two TCRs contrasted with the nominaltrajectory As shown in Figure 11(a) at the ballistic vertex theattitude of two TCRs is 300sim400m higher than the nominaltrajectory then the trajectory of two TCRs gradually closeto the nominal trajectory under the effect of flight controlsystem As shown in Figure 11(b) the cross range of thetwo TCRs gradually closes to the nominal trajectory underthe effect of flight control system The final impact pointdeviation of TCR1 is (45 212) and the final impact pointdeviation of TCR2 is (minus283 354) which demonstrates thefiring control scheme works effectively
7 Conclusion
This paper establishes the 6-DOF trajectorymodel of a rocketwith lateral force and presents an optimum control schemeof firing time and firing phase angle by taking impact point
International Journal of Aerospace Engineering 11
deviation as optimumobjective functionwhich takes accountof the difference of longitudinal and horizontal correctionefficiency firing delay roll rate flight stability and so forthThe result of Monte Carlo simulations shows that the uncon-trolled rockets have a CEP of 359m the CEPwas improved to38mwith the general firing control scheme as a contrast theCEP was improved to 20m with the optimum firing controlscheme The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of CEP and thereduction of thruster consumption testify the effectiveness offiring control optimization The variations of rocket impactpoint dispersion are analyzed with different impulse andnumber of impulse thrusters It is shown that the impactpoint dispersion is mainly influenced by the total impulseof impulse thrusters deployed and steadily decreases as thetotal impulse is increased The impulse number and firinginterval need to be optimized to insure the flight stabilityof rockets and impulse thrusters activated at time whenthe correction efficiency is higher Two trajectory correctionrockets have been launched to verify the effectiveness of thefiring control scheme the final impact point deviations of twotrajectory correction rockets are respectively (45 212) and(minus283 354) which demonstrates the firing control schemeworks effectively
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] M Costello ldquoExtended range of a gun launched smart projectileusing controllable canardsrdquo Shock and Vibration vol 8 no 3-4pp 203ndash213 2001
[2] J Rogers and M Costello ldquoDesign of a roll-stabilized mortarprojectile with reciprocating canardsrdquo Journal of GuidanceControl and Dynamics vol 33 no 4 pp 1026ndash1034 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofan asymmetric projectile with activating canardsrdquo Journal ofSpacecraft and Rockets vol 49 no 1 pp 130ndash135 2012
[4] M Costello and A Peterson ldquoLinear theory of a dual-spinprojectile in atmospheric flightrdquo Journal of Guidance Controland Dynamics vol 23 no 5 pp 789ndash797 2000
[5] A Elsaadany and Y Wen-Jun ldquoAccuracy improvement capa-bility of advanced projectile based on course correction fuzeconceptrdquo The Scientific World Journal vol 2014 Article ID273450 10 pages 2014
[6] M Amitay D R Smith V Kibens D E Parekh and A GlezerldquoAerodynamic flow control over an unconventional airfoil usingsynthetic jet actuatorsrdquoAIAA journal vol 39 no 3 pp 361ndash3702001
[7] M S L Hollis and F J Brandon ldquoRange correction module fora spin stabilized projectilerdquo US Patent Documents US-58165311998
[8] M S L Hollis and F J Brandon ldquoDesign and analysis of afuze-configurable range correction device for an artillery pro-jectilerdquo Report ARL-TR-2074 US Army Research LaboratoryAberdeen Proving Ground Aberdeen Md USA 1999
[9] J Brandeis and J Gill ldquoExperimental investigation of super- andhypersonic jet interaction on missile configurationsrdquo Journal ofSpacecraft and Rockets vol 35 no 3 pp 296ndash302 1998
[10] B Burchett A Peterson and M Costello ldquoPrediction ofswerving motion of a dual-spin projectile with lateral pulse jetsin atmospheric flightrdquo Mathematical and Computer Modellingvol 35 no 7-8 pp 821ndash834 2002
[11] D Corriveau P Wey and C Berner ldquoThrusters pairing guide-lines for trajectory corrections of projectilesrdquo Journal of Guid-ance Control and Dynamics vol 34 no 4 pp 1120ndash1128 2011
[12] T Harkins and T Brown ldquoUsing active damping as a precision-enhancing technology for 275-inch rocketsrdquo Tech Rep ARL-TR-1772 US Army Research Laboratory Aberdeen Md USA1999
[13] T Jitpraphai and M Costello ldquoDispersion reduction of a directfire rocket using lateral pulse jetsrdquo Journal of Spacecraft andRockets vol 38 no 6 pp 929ndash936 2001
[14] B Burchett and M Costello ldquoModel predictive lateral pulse jetcontrol of an atmospheric rocketrdquo Journal of Guidance Controland Dynamics vol 25 no 5 pp 860ndash867 2002
[15] S K Gupta S Saxena A Singhal and A K Ghosh ldquoTrajectorycorrection flight control system using pulsejet on an artilleryrocketrdquo Defence Science Journal vol 58 no 1 pp 15ndash33 2008
[16] B Pavkovic M Pavic and D Cuk ldquoFrequency-modulatedpulse-jet control of an artillery rocketrdquo Journal of Spacecraft andRockets vol 49 no 2 pp 286ndash294 2012
[17] B Pavkovic M Pavic and D Cuk ldquoEnhancing the precisionof artillery rockets using pulsejet control systems with activedampingrdquo Scientific Technical Review vol 62 no 2 pp 10ndash192012
[18] H-W Yang L-H Dou and M-G Gan ldquoControl method ofimpulse actuator of antiaircraft trajectory correction projectilerdquoTransaction of Beijing Institute of Technology vol 31 no 10 pp1184ndash1188 2011
[19] Y-J Cao S-X Yang and X-J Li ldquoResearch on firing phaseangle optimization of terminal trajectory correction projectilebased on pulse jet controlrdquo Acta Armamentarii vol 29 no 8pp 897ndash901 2008
[20] F Gao and H Zhang ldquoStudy of 2-D trajectory correction basedon geomagnetic detection with impulse force for projectilesrdquoJournal of System Simulation vol 23 no 1 pp 123ndash128 2011
[21] X Qian R Lin and Y Zhao Aerothermodynamics of MissileFlight Beijing Institute of Technology Press Beijing China2008
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Aerospace Engineering
600
400
200
0
minus200
minus400
minus600
minus1500 minus1000 minus500 0 500 1000 1500
Rang
e miss
(m)
Cross-range miss (m)
CEP = 359m
(a) Impact point distribution of uncontrolled rockets
Cross-range miss (m)
400
300
200
100
0
minus100
minus200
minus300minus100 0 100 200 300
Rang
e miss
(m)
CEP = 38m
(b) Impact point distribution of rockets with general firing controlscheme
Cross-range miss (m)
Rang
e miss
(m)
CEP = 20m300
200
100
0
minus100
minus200
minus300
minus50 0 50 100 150 200 250 300
(c) Impact point distribution of rockets with the optimum firingcontrol scheme
Figure 9 Impact point distribution
Figure 9 shows the impact point distribution using theMonte Carlo method The cases of the uncontrolled rocketsas well as of the rockets with general firing control schemeand optimum firing control scheme are shown The analysiswas performed for a statistical sample of 1024 simulationsAll initial conditions were modeled as Gaussian randomvariables with mean values and standard deviations givenin Table 1 Wind direction is a uniform random variablebetween 0 and 2120587 The nominal launching elevation angle is4231 deg but the mean value of launching elevation angleis set as 4251 deg a launching elevation angle error about02 deg and a launching azimuth angle error about 01 degwere introduced to simulate the accuracy errors of rockets
The result of Monte Carlo simulations is shown inFigure 9 for uncontrolled rockets the max value of rangemiss is 5892m while the min value of range miss is minus4219the mean value of range miss is 955 the max value of crossrange miss is 13498 while the min value of cross range
Table 1 Initial conditions and disturbances
Parameter Unit Mean value Standard deviationLaunching elevationangle deg 4251 02
Launching azimuthangle deg 01 02
Impulse of the mainrocket motor 100 01
Wind ms 0 2
miss is minus10636 the mean value of cross range miss is 438there are more points in the first quadrant (right upper side)of the plane coordinate system as shown in Figure 9(a)and the CEP of uncontrolled rockets is 359m Impact pointdistribution of the trajectory correction rockets reducesgreatly as shown in Figures 9(b) and 9(c) The rockets with
International Journal of Aerospace Engineering 9
400
350
300
250
200
150
100
50
0
0 10 20 30 40 50
Number of impulse thrusters
CEP
(m)
30N-s20N-s10N-s
(a) CEP versus number of thrusters and individual thruster impulse
400
350
300
250
200
150
100
50
0
CEP
(m)
0 200 400 600 800 1000
Total impulse (N-s)
30N-s20N-s10N-s
(b) CEP versus total impulse of thrusters and individual thrusterimpulse
9
8
7
6
5
4
3
2
1
5 10 15 20 25 30
Max
imal
tota
l atta
ck an
gle (
deg)
Individual thruster impulse (N-s)
100ms200ms300ms
(c) Maximal total attack angle versus individual thruster impulse andminimum firing interval
Figure 10 The impact of parameters of thrusters on CEP and flight stability of rockets
the general firing control scheme have a CEP of 38m whilethe CEP of rockets with the optimum firing control schemeis 20m The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of impact pointdispersion of rockets and the reduction of thruster consump-tion testify the effectiveness of firing control optimization
Figure 10 shows the impact of thruster parameters onthe CEP and flight stability of rockets Figure 10(a) shows
the relation between CEP of rockets number of thrustersmounted on rocket and individual thruster impulse It canbe known that the CEP of rockets is highly correlated withthe number of thrusters and individual thruster impulse andCEP reduces steadily as the number of thrusters or individualthruster impulse is increased
Figure 10(b) shows the relationship between CEP ofrockets individual thruster impulse and the total impulseof thrusters For a value of the total impulse as the individ-ual thruster impulse is increased the number of thrustersdecreases proportionally for the total impulse to remain as
10 International Journal of Aerospace Engineering
0 5 10 15 20 25 30
0
2
4
6
8
10
Nominal trajectoryTCR1TCR2
minus2
y(k
m)
x (km)
(a) Attitude versus range
0 5 10 15 20 25 30
0
50
100
Nominal trajectoryTCR1TCR2
x (km)
minus50
minus100
minus150
minus200
minus250
minus300
z(m
)(b) Cross range versus range
Figure 11 The trajectory of two TCRs
a constant As shown in Figure 10(b) the evolution of thethree curves is similar when the thruster impulse is smallthe number of thrusters is large and some thrusters willbe activated at time when the correction efficiency is lowerwhich is the unfavorable aspect for trajectory correctionhowever large thruster number means more correctionopportunity and the correction precision of a small thrusterimpulse is higher which is the favorable aspect for trajectorycorrection these two aspects are contradictory the combinedeffect of these two aspects leads to the similar evolution ofthe three curves The result indicates that CEP is mainlyinfluenced by the total impulse when the individual thrusterimpulse is reasonable CEP reduces gradually as the totalimpulse is increased and the value of individual thrusterimpulse has a small impact on CEP
Figure 10(c) shows the relationship between maximumtotal attack angle individual thruster impulse and theminimum firing interval (Δ119905fire) The results indicate thatindividual thruster impulse and minimum firing intervalhave a direct impact on the maximum total attack angleas individual thruster impulse increases or minimum firinginterval reduces the maximum total attack angle increaseswhich may affect the flight stability of trajectory correctionrockets
Based on the above discussion some suggestions are putforward to determine the thruster configuration parametersof trajectory correction rockets Firstly the total impulseshould be determined according to CEP needed because theimpact point dispersion is mainly influenced by the totalimpulse of lateral thrusters deployed Secondly individualthruster impulse should be determined according to the totalimpulse limits of layout space on the rocket flight stability ofrockets cost and so forth If the individual thruster impulseis too small there may be too many thrusters needed to bemounted on the rocket On the other hand if the individual
thruster impulse is too large the flight stability may deterio-rate Thirdly the minimum firing interval should be deter-mined according to the individual thruster impulse flightstability of rockets correction efficiency of thrusters and soforth If the individual thruster impulse is large a relativelylarge minimum firing interval should be set to guarantee theflight stability of rockets If the individual thruster impulse issmall a relatively small minimum firing interval time shouldbe set to insure thrusters can be activated at the segment oftrajectory while the correction efficiency is higher
Live experiments have been done to verify the effec-tiveness of the firing control scheme The characters of thetrajectory correction rockets (TCR) have been launched sameas the rocket described in simulations above Two TCRshave been launched toward a target on the ground withaltitude equal to 200m and cross range equal to zero at arange of 28000m the launching elevation angle was set to436 deg according to theweather of the time Figure 11 showsthe trajectory of two TCRs contrasted with the nominaltrajectory As shown in Figure 11(a) at the ballistic vertex theattitude of two TCRs is 300sim400m higher than the nominaltrajectory then the trajectory of two TCRs gradually closeto the nominal trajectory under the effect of flight controlsystem As shown in Figure 11(b) the cross range of thetwo TCRs gradually closes to the nominal trajectory underthe effect of flight control system The final impact pointdeviation of TCR1 is (45 212) and the final impact pointdeviation of TCR2 is (minus283 354) which demonstrates thefiring control scheme works effectively
7 Conclusion
This paper establishes the 6-DOF trajectorymodel of a rocketwith lateral force and presents an optimum control schemeof firing time and firing phase angle by taking impact point
International Journal of Aerospace Engineering 11
deviation as optimumobjective functionwhich takes accountof the difference of longitudinal and horizontal correctionefficiency firing delay roll rate flight stability and so forthThe result of Monte Carlo simulations shows that the uncon-trolled rockets have a CEP of 359m the CEPwas improved to38mwith the general firing control scheme as a contrast theCEP was improved to 20m with the optimum firing controlscheme The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of CEP and thereduction of thruster consumption testify the effectiveness offiring control optimization The variations of rocket impactpoint dispersion are analyzed with different impulse andnumber of impulse thrusters It is shown that the impactpoint dispersion is mainly influenced by the total impulseof impulse thrusters deployed and steadily decreases as thetotal impulse is increased The impulse number and firinginterval need to be optimized to insure the flight stabilityof rockets and impulse thrusters activated at time whenthe correction efficiency is higher Two trajectory correctionrockets have been launched to verify the effectiveness of thefiring control scheme the final impact point deviations of twotrajectory correction rockets are respectively (45 212) and(minus283 354) which demonstrates the firing control schemeworks effectively
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] M Costello ldquoExtended range of a gun launched smart projectileusing controllable canardsrdquo Shock and Vibration vol 8 no 3-4pp 203ndash213 2001
[2] J Rogers and M Costello ldquoDesign of a roll-stabilized mortarprojectile with reciprocating canardsrdquo Journal of GuidanceControl and Dynamics vol 33 no 4 pp 1026ndash1034 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofan asymmetric projectile with activating canardsrdquo Journal ofSpacecraft and Rockets vol 49 no 1 pp 130ndash135 2012
[4] M Costello and A Peterson ldquoLinear theory of a dual-spinprojectile in atmospheric flightrdquo Journal of Guidance Controland Dynamics vol 23 no 5 pp 789ndash797 2000
[5] A Elsaadany and Y Wen-Jun ldquoAccuracy improvement capa-bility of advanced projectile based on course correction fuzeconceptrdquo The Scientific World Journal vol 2014 Article ID273450 10 pages 2014
[6] M Amitay D R Smith V Kibens D E Parekh and A GlezerldquoAerodynamic flow control over an unconventional airfoil usingsynthetic jet actuatorsrdquoAIAA journal vol 39 no 3 pp 361ndash3702001
[7] M S L Hollis and F J Brandon ldquoRange correction module fora spin stabilized projectilerdquo US Patent Documents US-58165311998
[8] M S L Hollis and F J Brandon ldquoDesign and analysis of afuze-configurable range correction device for an artillery pro-jectilerdquo Report ARL-TR-2074 US Army Research LaboratoryAberdeen Proving Ground Aberdeen Md USA 1999
[9] J Brandeis and J Gill ldquoExperimental investigation of super- andhypersonic jet interaction on missile configurationsrdquo Journal ofSpacecraft and Rockets vol 35 no 3 pp 296ndash302 1998
[10] B Burchett A Peterson and M Costello ldquoPrediction ofswerving motion of a dual-spin projectile with lateral pulse jetsin atmospheric flightrdquo Mathematical and Computer Modellingvol 35 no 7-8 pp 821ndash834 2002
[11] D Corriveau P Wey and C Berner ldquoThrusters pairing guide-lines for trajectory corrections of projectilesrdquo Journal of Guid-ance Control and Dynamics vol 34 no 4 pp 1120ndash1128 2011
[12] T Harkins and T Brown ldquoUsing active damping as a precision-enhancing technology for 275-inch rocketsrdquo Tech Rep ARL-TR-1772 US Army Research Laboratory Aberdeen Md USA1999
[13] T Jitpraphai and M Costello ldquoDispersion reduction of a directfire rocket using lateral pulse jetsrdquo Journal of Spacecraft andRockets vol 38 no 6 pp 929ndash936 2001
[14] B Burchett and M Costello ldquoModel predictive lateral pulse jetcontrol of an atmospheric rocketrdquo Journal of Guidance Controland Dynamics vol 25 no 5 pp 860ndash867 2002
[15] S K Gupta S Saxena A Singhal and A K Ghosh ldquoTrajectorycorrection flight control system using pulsejet on an artilleryrocketrdquo Defence Science Journal vol 58 no 1 pp 15ndash33 2008
[16] B Pavkovic M Pavic and D Cuk ldquoFrequency-modulatedpulse-jet control of an artillery rocketrdquo Journal of Spacecraft andRockets vol 49 no 2 pp 286ndash294 2012
[17] B Pavkovic M Pavic and D Cuk ldquoEnhancing the precisionof artillery rockets using pulsejet control systems with activedampingrdquo Scientific Technical Review vol 62 no 2 pp 10ndash192012
[18] H-W Yang L-H Dou and M-G Gan ldquoControl method ofimpulse actuator of antiaircraft trajectory correction projectilerdquoTransaction of Beijing Institute of Technology vol 31 no 10 pp1184ndash1188 2011
[19] Y-J Cao S-X Yang and X-J Li ldquoResearch on firing phaseangle optimization of terminal trajectory correction projectilebased on pulse jet controlrdquo Acta Armamentarii vol 29 no 8pp 897ndash901 2008
[20] F Gao and H Zhang ldquoStudy of 2-D trajectory correction basedon geomagnetic detection with impulse force for projectilesrdquoJournal of System Simulation vol 23 no 1 pp 123ndash128 2011
[21] X Qian R Lin and Y Zhao Aerothermodynamics of MissileFlight Beijing Institute of Technology Press Beijing China2008
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 9
400
350
300
250
200
150
100
50
0
0 10 20 30 40 50
Number of impulse thrusters
CEP
(m)
30N-s20N-s10N-s
(a) CEP versus number of thrusters and individual thruster impulse
400
350
300
250
200
150
100
50
0
CEP
(m)
0 200 400 600 800 1000
Total impulse (N-s)
30N-s20N-s10N-s
(b) CEP versus total impulse of thrusters and individual thrusterimpulse
9
8
7
6
5
4
3
2
1
5 10 15 20 25 30
Max
imal
tota
l atta
ck an
gle (
deg)
Individual thruster impulse (N-s)
100ms200ms300ms
(c) Maximal total attack angle versus individual thruster impulse andminimum firing interval
Figure 10 The impact of parameters of thrusters on CEP and flight stability of rockets
the general firing control scheme have a CEP of 38m whilethe CEP of rockets with the optimum firing control schemeis 20m The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of impact pointdispersion of rockets and the reduction of thruster consump-tion testify the effectiveness of firing control optimization
Figure 10 shows the impact of thruster parameters onthe CEP and flight stability of rockets Figure 10(a) shows
the relation between CEP of rockets number of thrustersmounted on rocket and individual thruster impulse It canbe known that the CEP of rockets is highly correlated withthe number of thrusters and individual thruster impulse andCEP reduces steadily as the number of thrusters or individualthruster impulse is increased
Figure 10(b) shows the relationship between CEP ofrockets individual thruster impulse and the total impulseof thrusters For a value of the total impulse as the individ-ual thruster impulse is increased the number of thrustersdecreases proportionally for the total impulse to remain as
10 International Journal of Aerospace Engineering
0 5 10 15 20 25 30
0
2
4
6
8
10
Nominal trajectoryTCR1TCR2
minus2
y(k
m)
x (km)
(a) Attitude versus range
0 5 10 15 20 25 30
0
50
100
Nominal trajectoryTCR1TCR2
x (km)
minus50
minus100
minus150
minus200
minus250
minus300
z(m
)(b) Cross range versus range
Figure 11 The trajectory of two TCRs
a constant As shown in Figure 10(b) the evolution of thethree curves is similar when the thruster impulse is smallthe number of thrusters is large and some thrusters willbe activated at time when the correction efficiency is lowerwhich is the unfavorable aspect for trajectory correctionhowever large thruster number means more correctionopportunity and the correction precision of a small thrusterimpulse is higher which is the favorable aspect for trajectorycorrection these two aspects are contradictory the combinedeffect of these two aspects leads to the similar evolution ofthe three curves The result indicates that CEP is mainlyinfluenced by the total impulse when the individual thrusterimpulse is reasonable CEP reduces gradually as the totalimpulse is increased and the value of individual thrusterimpulse has a small impact on CEP
Figure 10(c) shows the relationship between maximumtotal attack angle individual thruster impulse and theminimum firing interval (Δ119905fire) The results indicate thatindividual thruster impulse and minimum firing intervalhave a direct impact on the maximum total attack angleas individual thruster impulse increases or minimum firinginterval reduces the maximum total attack angle increaseswhich may affect the flight stability of trajectory correctionrockets
Based on the above discussion some suggestions are putforward to determine the thruster configuration parametersof trajectory correction rockets Firstly the total impulseshould be determined according to CEP needed because theimpact point dispersion is mainly influenced by the totalimpulse of lateral thrusters deployed Secondly individualthruster impulse should be determined according to the totalimpulse limits of layout space on the rocket flight stability ofrockets cost and so forth If the individual thruster impulseis too small there may be too many thrusters needed to bemounted on the rocket On the other hand if the individual
thruster impulse is too large the flight stability may deterio-rate Thirdly the minimum firing interval should be deter-mined according to the individual thruster impulse flightstability of rockets correction efficiency of thrusters and soforth If the individual thruster impulse is large a relativelylarge minimum firing interval should be set to guarantee theflight stability of rockets If the individual thruster impulse issmall a relatively small minimum firing interval time shouldbe set to insure thrusters can be activated at the segment oftrajectory while the correction efficiency is higher
Live experiments have been done to verify the effec-tiveness of the firing control scheme The characters of thetrajectory correction rockets (TCR) have been launched sameas the rocket described in simulations above Two TCRshave been launched toward a target on the ground withaltitude equal to 200m and cross range equal to zero at arange of 28000m the launching elevation angle was set to436 deg according to theweather of the time Figure 11 showsthe trajectory of two TCRs contrasted with the nominaltrajectory As shown in Figure 11(a) at the ballistic vertex theattitude of two TCRs is 300sim400m higher than the nominaltrajectory then the trajectory of two TCRs gradually closeto the nominal trajectory under the effect of flight controlsystem As shown in Figure 11(b) the cross range of thetwo TCRs gradually closes to the nominal trajectory underthe effect of flight control system The final impact pointdeviation of TCR1 is (45 212) and the final impact pointdeviation of TCR2 is (minus283 354) which demonstrates thefiring control scheme works effectively
7 Conclusion
This paper establishes the 6-DOF trajectorymodel of a rocketwith lateral force and presents an optimum control schemeof firing time and firing phase angle by taking impact point
International Journal of Aerospace Engineering 11
deviation as optimumobjective functionwhich takes accountof the difference of longitudinal and horizontal correctionefficiency firing delay roll rate flight stability and so forthThe result of Monte Carlo simulations shows that the uncon-trolled rockets have a CEP of 359m the CEPwas improved to38mwith the general firing control scheme as a contrast theCEP was improved to 20m with the optimum firing controlscheme The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of CEP and thereduction of thruster consumption testify the effectiveness offiring control optimization The variations of rocket impactpoint dispersion are analyzed with different impulse andnumber of impulse thrusters It is shown that the impactpoint dispersion is mainly influenced by the total impulseof impulse thrusters deployed and steadily decreases as thetotal impulse is increased The impulse number and firinginterval need to be optimized to insure the flight stabilityof rockets and impulse thrusters activated at time whenthe correction efficiency is higher Two trajectory correctionrockets have been launched to verify the effectiveness of thefiring control scheme the final impact point deviations of twotrajectory correction rockets are respectively (45 212) and(minus283 354) which demonstrates the firing control schemeworks effectively
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] M Costello ldquoExtended range of a gun launched smart projectileusing controllable canardsrdquo Shock and Vibration vol 8 no 3-4pp 203ndash213 2001
[2] J Rogers and M Costello ldquoDesign of a roll-stabilized mortarprojectile with reciprocating canardsrdquo Journal of GuidanceControl and Dynamics vol 33 no 4 pp 1026ndash1034 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofan asymmetric projectile with activating canardsrdquo Journal ofSpacecraft and Rockets vol 49 no 1 pp 130ndash135 2012
[4] M Costello and A Peterson ldquoLinear theory of a dual-spinprojectile in atmospheric flightrdquo Journal of Guidance Controland Dynamics vol 23 no 5 pp 789ndash797 2000
[5] A Elsaadany and Y Wen-Jun ldquoAccuracy improvement capa-bility of advanced projectile based on course correction fuzeconceptrdquo The Scientific World Journal vol 2014 Article ID273450 10 pages 2014
[6] M Amitay D R Smith V Kibens D E Parekh and A GlezerldquoAerodynamic flow control over an unconventional airfoil usingsynthetic jet actuatorsrdquoAIAA journal vol 39 no 3 pp 361ndash3702001
[7] M S L Hollis and F J Brandon ldquoRange correction module fora spin stabilized projectilerdquo US Patent Documents US-58165311998
[8] M S L Hollis and F J Brandon ldquoDesign and analysis of afuze-configurable range correction device for an artillery pro-jectilerdquo Report ARL-TR-2074 US Army Research LaboratoryAberdeen Proving Ground Aberdeen Md USA 1999
[9] J Brandeis and J Gill ldquoExperimental investigation of super- andhypersonic jet interaction on missile configurationsrdquo Journal ofSpacecraft and Rockets vol 35 no 3 pp 296ndash302 1998
[10] B Burchett A Peterson and M Costello ldquoPrediction ofswerving motion of a dual-spin projectile with lateral pulse jetsin atmospheric flightrdquo Mathematical and Computer Modellingvol 35 no 7-8 pp 821ndash834 2002
[11] D Corriveau P Wey and C Berner ldquoThrusters pairing guide-lines for trajectory corrections of projectilesrdquo Journal of Guid-ance Control and Dynamics vol 34 no 4 pp 1120ndash1128 2011
[12] T Harkins and T Brown ldquoUsing active damping as a precision-enhancing technology for 275-inch rocketsrdquo Tech Rep ARL-TR-1772 US Army Research Laboratory Aberdeen Md USA1999
[13] T Jitpraphai and M Costello ldquoDispersion reduction of a directfire rocket using lateral pulse jetsrdquo Journal of Spacecraft andRockets vol 38 no 6 pp 929ndash936 2001
[14] B Burchett and M Costello ldquoModel predictive lateral pulse jetcontrol of an atmospheric rocketrdquo Journal of Guidance Controland Dynamics vol 25 no 5 pp 860ndash867 2002
[15] S K Gupta S Saxena A Singhal and A K Ghosh ldquoTrajectorycorrection flight control system using pulsejet on an artilleryrocketrdquo Defence Science Journal vol 58 no 1 pp 15ndash33 2008
[16] B Pavkovic M Pavic and D Cuk ldquoFrequency-modulatedpulse-jet control of an artillery rocketrdquo Journal of Spacecraft andRockets vol 49 no 2 pp 286ndash294 2012
[17] B Pavkovic M Pavic and D Cuk ldquoEnhancing the precisionof artillery rockets using pulsejet control systems with activedampingrdquo Scientific Technical Review vol 62 no 2 pp 10ndash192012
[18] H-W Yang L-H Dou and M-G Gan ldquoControl method ofimpulse actuator of antiaircraft trajectory correction projectilerdquoTransaction of Beijing Institute of Technology vol 31 no 10 pp1184ndash1188 2011
[19] Y-J Cao S-X Yang and X-J Li ldquoResearch on firing phaseangle optimization of terminal trajectory correction projectilebased on pulse jet controlrdquo Acta Armamentarii vol 29 no 8pp 897ndash901 2008
[20] F Gao and H Zhang ldquoStudy of 2-D trajectory correction basedon geomagnetic detection with impulse force for projectilesrdquoJournal of System Simulation vol 23 no 1 pp 123ndash128 2011
[21] X Qian R Lin and Y Zhao Aerothermodynamics of MissileFlight Beijing Institute of Technology Press Beijing China2008
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 International Journal of Aerospace Engineering
0 5 10 15 20 25 30
0
2
4
6
8
10
Nominal trajectoryTCR1TCR2
minus2
y(k
m)
x (km)
(a) Attitude versus range
0 5 10 15 20 25 30
0
50
100
Nominal trajectoryTCR1TCR2
x (km)
minus50
minus100
minus150
minus200
minus250
minus300
z(m
)(b) Cross range versus range
Figure 11 The trajectory of two TCRs
a constant As shown in Figure 10(b) the evolution of thethree curves is similar when the thruster impulse is smallthe number of thrusters is large and some thrusters willbe activated at time when the correction efficiency is lowerwhich is the unfavorable aspect for trajectory correctionhowever large thruster number means more correctionopportunity and the correction precision of a small thrusterimpulse is higher which is the favorable aspect for trajectorycorrection these two aspects are contradictory the combinedeffect of these two aspects leads to the similar evolution ofthe three curves The result indicates that CEP is mainlyinfluenced by the total impulse when the individual thrusterimpulse is reasonable CEP reduces gradually as the totalimpulse is increased and the value of individual thrusterimpulse has a small impact on CEP
Figure 10(c) shows the relationship between maximumtotal attack angle individual thruster impulse and theminimum firing interval (Δ119905fire) The results indicate thatindividual thruster impulse and minimum firing intervalhave a direct impact on the maximum total attack angleas individual thruster impulse increases or minimum firinginterval reduces the maximum total attack angle increaseswhich may affect the flight stability of trajectory correctionrockets
Based on the above discussion some suggestions are putforward to determine the thruster configuration parametersof trajectory correction rockets Firstly the total impulseshould be determined according to CEP needed because theimpact point dispersion is mainly influenced by the totalimpulse of lateral thrusters deployed Secondly individualthruster impulse should be determined according to the totalimpulse limits of layout space on the rocket flight stability ofrockets cost and so forth If the individual thruster impulseis too small there may be too many thrusters needed to bemounted on the rocket On the other hand if the individual
thruster impulse is too large the flight stability may deterio-rate Thirdly the minimum firing interval should be deter-mined according to the individual thruster impulse flightstability of rockets correction efficiency of thrusters and soforth If the individual thruster impulse is large a relativelylarge minimum firing interval should be set to guarantee theflight stability of rockets If the individual thruster impulse issmall a relatively small minimum firing interval time shouldbe set to insure thrusters can be activated at the segment oftrajectory while the correction efficiency is higher
Live experiments have been done to verify the effec-tiveness of the firing control scheme The characters of thetrajectory correction rockets (TCR) have been launched sameas the rocket described in simulations above Two TCRshave been launched toward a target on the ground withaltitude equal to 200m and cross range equal to zero at arange of 28000m the launching elevation angle was set to436 deg according to theweather of the time Figure 11 showsthe trajectory of two TCRs contrasted with the nominaltrajectory As shown in Figure 11(a) at the ballistic vertex theattitude of two TCRs is 300sim400m higher than the nominaltrajectory then the trajectory of two TCRs gradually closeto the nominal trajectory under the effect of flight controlsystem As shown in Figure 11(b) the cross range of thetwo TCRs gradually closes to the nominal trajectory underthe effect of flight control system The final impact pointdeviation of TCR1 is (45 212) and the final impact pointdeviation of TCR2 is (minus283 354) which demonstrates thefiring control scheme works effectively
7 Conclusion
This paper establishes the 6-DOF trajectorymodel of a rocketwith lateral force and presents an optimum control schemeof firing time and firing phase angle by taking impact point
International Journal of Aerospace Engineering 11
deviation as optimumobjective functionwhich takes accountof the difference of longitudinal and horizontal correctionefficiency firing delay roll rate flight stability and so forthThe result of Monte Carlo simulations shows that the uncon-trolled rockets have a CEP of 359m the CEPwas improved to38mwith the general firing control scheme as a contrast theCEP was improved to 20m with the optimum firing controlscheme The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of CEP and thereduction of thruster consumption testify the effectiveness offiring control optimization The variations of rocket impactpoint dispersion are analyzed with different impulse andnumber of impulse thrusters It is shown that the impactpoint dispersion is mainly influenced by the total impulseof impulse thrusters deployed and steadily decreases as thetotal impulse is increased The impulse number and firinginterval need to be optimized to insure the flight stabilityof rockets and impulse thrusters activated at time whenthe correction efficiency is higher Two trajectory correctionrockets have been launched to verify the effectiveness of thefiring control scheme the final impact point deviations of twotrajectory correction rockets are respectively (45 212) and(minus283 354) which demonstrates the firing control schemeworks effectively
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] M Costello ldquoExtended range of a gun launched smart projectileusing controllable canardsrdquo Shock and Vibration vol 8 no 3-4pp 203ndash213 2001
[2] J Rogers and M Costello ldquoDesign of a roll-stabilized mortarprojectile with reciprocating canardsrdquo Journal of GuidanceControl and Dynamics vol 33 no 4 pp 1026ndash1034 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofan asymmetric projectile with activating canardsrdquo Journal ofSpacecraft and Rockets vol 49 no 1 pp 130ndash135 2012
[4] M Costello and A Peterson ldquoLinear theory of a dual-spinprojectile in atmospheric flightrdquo Journal of Guidance Controland Dynamics vol 23 no 5 pp 789ndash797 2000
[5] A Elsaadany and Y Wen-Jun ldquoAccuracy improvement capa-bility of advanced projectile based on course correction fuzeconceptrdquo The Scientific World Journal vol 2014 Article ID273450 10 pages 2014
[6] M Amitay D R Smith V Kibens D E Parekh and A GlezerldquoAerodynamic flow control over an unconventional airfoil usingsynthetic jet actuatorsrdquoAIAA journal vol 39 no 3 pp 361ndash3702001
[7] M S L Hollis and F J Brandon ldquoRange correction module fora spin stabilized projectilerdquo US Patent Documents US-58165311998
[8] M S L Hollis and F J Brandon ldquoDesign and analysis of afuze-configurable range correction device for an artillery pro-jectilerdquo Report ARL-TR-2074 US Army Research LaboratoryAberdeen Proving Ground Aberdeen Md USA 1999
[9] J Brandeis and J Gill ldquoExperimental investigation of super- andhypersonic jet interaction on missile configurationsrdquo Journal ofSpacecraft and Rockets vol 35 no 3 pp 296ndash302 1998
[10] B Burchett A Peterson and M Costello ldquoPrediction ofswerving motion of a dual-spin projectile with lateral pulse jetsin atmospheric flightrdquo Mathematical and Computer Modellingvol 35 no 7-8 pp 821ndash834 2002
[11] D Corriveau P Wey and C Berner ldquoThrusters pairing guide-lines for trajectory corrections of projectilesrdquo Journal of Guid-ance Control and Dynamics vol 34 no 4 pp 1120ndash1128 2011
[12] T Harkins and T Brown ldquoUsing active damping as a precision-enhancing technology for 275-inch rocketsrdquo Tech Rep ARL-TR-1772 US Army Research Laboratory Aberdeen Md USA1999
[13] T Jitpraphai and M Costello ldquoDispersion reduction of a directfire rocket using lateral pulse jetsrdquo Journal of Spacecraft andRockets vol 38 no 6 pp 929ndash936 2001
[14] B Burchett and M Costello ldquoModel predictive lateral pulse jetcontrol of an atmospheric rocketrdquo Journal of Guidance Controland Dynamics vol 25 no 5 pp 860ndash867 2002
[15] S K Gupta S Saxena A Singhal and A K Ghosh ldquoTrajectorycorrection flight control system using pulsejet on an artilleryrocketrdquo Defence Science Journal vol 58 no 1 pp 15ndash33 2008
[16] B Pavkovic M Pavic and D Cuk ldquoFrequency-modulatedpulse-jet control of an artillery rocketrdquo Journal of Spacecraft andRockets vol 49 no 2 pp 286ndash294 2012
[17] B Pavkovic M Pavic and D Cuk ldquoEnhancing the precisionof artillery rockets using pulsejet control systems with activedampingrdquo Scientific Technical Review vol 62 no 2 pp 10ndash192012
[18] H-W Yang L-H Dou and M-G Gan ldquoControl method ofimpulse actuator of antiaircraft trajectory correction projectilerdquoTransaction of Beijing Institute of Technology vol 31 no 10 pp1184ndash1188 2011
[19] Y-J Cao S-X Yang and X-J Li ldquoResearch on firing phaseangle optimization of terminal trajectory correction projectilebased on pulse jet controlrdquo Acta Armamentarii vol 29 no 8pp 897ndash901 2008
[20] F Gao and H Zhang ldquoStudy of 2-D trajectory correction basedon geomagnetic detection with impulse force for projectilesrdquoJournal of System Simulation vol 23 no 1 pp 123ndash128 2011
[21] X Qian R Lin and Y Zhao Aerothermodynamics of MissileFlight Beijing Institute of Technology Press Beijing China2008
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 11
deviation as optimumobjective functionwhich takes accountof the difference of longitudinal and horizontal correctionefficiency firing delay roll rate flight stability and so forthThe result of Monte Carlo simulations shows that the uncon-trolled rockets have a CEP of 359m the CEPwas improved to38mwith the general firing control scheme as a contrast theCEP was improved to 20m with the optimum firing controlscheme The average thruster consumption and its standarddeviation of the rocketswith the general firing control schemeare 317 and 155 while the average thruster consumption andits standard deviation of the rockets with the optimum firingcontrol scheme are 251 and 133The decrease of CEP and thereduction of thruster consumption testify the effectiveness offiring control optimization The variations of rocket impactpoint dispersion are analyzed with different impulse andnumber of impulse thrusters It is shown that the impactpoint dispersion is mainly influenced by the total impulseof impulse thrusters deployed and steadily decreases as thetotal impulse is increased The impulse number and firinginterval need to be optimized to insure the flight stabilityof rockets and impulse thrusters activated at time whenthe correction efficiency is higher Two trajectory correctionrockets have been launched to verify the effectiveness of thefiring control scheme the final impact point deviations of twotrajectory correction rockets are respectively (45 212) and(minus283 354) which demonstrates the firing control schemeworks effectively
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] M Costello ldquoExtended range of a gun launched smart projectileusing controllable canardsrdquo Shock and Vibration vol 8 no 3-4pp 203ndash213 2001
[2] J Rogers and M Costello ldquoDesign of a roll-stabilized mortarprojectile with reciprocating canardsrdquo Journal of GuidanceControl and Dynamics vol 33 no 4 pp 1026ndash1034 2010
[3] G Cooper F Fresconi and M Costello ldquoFlight stability ofan asymmetric projectile with activating canardsrdquo Journal ofSpacecraft and Rockets vol 49 no 1 pp 130ndash135 2012
[4] M Costello and A Peterson ldquoLinear theory of a dual-spinprojectile in atmospheric flightrdquo Journal of Guidance Controland Dynamics vol 23 no 5 pp 789ndash797 2000
[5] A Elsaadany and Y Wen-Jun ldquoAccuracy improvement capa-bility of advanced projectile based on course correction fuzeconceptrdquo The Scientific World Journal vol 2014 Article ID273450 10 pages 2014
[6] M Amitay D R Smith V Kibens D E Parekh and A GlezerldquoAerodynamic flow control over an unconventional airfoil usingsynthetic jet actuatorsrdquoAIAA journal vol 39 no 3 pp 361ndash3702001
[7] M S L Hollis and F J Brandon ldquoRange correction module fora spin stabilized projectilerdquo US Patent Documents US-58165311998
[8] M S L Hollis and F J Brandon ldquoDesign and analysis of afuze-configurable range correction device for an artillery pro-jectilerdquo Report ARL-TR-2074 US Army Research LaboratoryAberdeen Proving Ground Aberdeen Md USA 1999
[9] J Brandeis and J Gill ldquoExperimental investigation of super- andhypersonic jet interaction on missile configurationsrdquo Journal ofSpacecraft and Rockets vol 35 no 3 pp 296ndash302 1998
[10] B Burchett A Peterson and M Costello ldquoPrediction ofswerving motion of a dual-spin projectile with lateral pulse jetsin atmospheric flightrdquo Mathematical and Computer Modellingvol 35 no 7-8 pp 821ndash834 2002
[11] D Corriveau P Wey and C Berner ldquoThrusters pairing guide-lines for trajectory corrections of projectilesrdquo Journal of Guid-ance Control and Dynamics vol 34 no 4 pp 1120ndash1128 2011
[12] T Harkins and T Brown ldquoUsing active damping as a precision-enhancing technology for 275-inch rocketsrdquo Tech Rep ARL-TR-1772 US Army Research Laboratory Aberdeen Md USA1999
[13] T Jitpraphai and M Costello ldquoDispersion reduction of a directfire rocket using lateral pulse jetsrdquo Journal of Spacecraft andRockets vol 38 no 6 pp 929ndash936 2001
[14] B Burchett and M Costello ldquoModel predictive lateral pulse jetcontrol of an atmospheric rocketrdquo Journal of Guidance Controland Dynamics vol 25 no 5 pp 860ndash867 2002
[15] S K Gupta S Saxena A Singhal and A K Ghosh ldquoTrajectorycorrection flight control system using pulsejet on an artilleryrocketrdquo Defence Science Journal vol 58 no 1 pp 15ndash33 2008
[16] B Pavkovic M Pavic and D Cuk ldquoFrequency-modulatedpulse-jet control of an artillery rocketrdquo Journal of Spacecraft andRockets vol 49 no 2 pp 286ndash294 2012
[17] B Pavkovic M Pavic and D Cuk ldquoEnhancing the precisionof artillery rockets using pulsejet control systems with activedampingrdquo Scientific Technical Review vol 62 no 2 pp 10ndash192012
[18] H-W Yang L-H Dou and M-G Gan ldquoControl method ofimpulse actuator of antiaircraft trajectory correction projectilerdquoTransaction of Beijing Institute of Technology vol 31 no 10 pp1184ndash1188 2011
[19] Y-J Cao S-X Yang and X-J Li ldquoResearch on firing phaseangle optimization of terminal trajectory correction projectilebased on pulse jet controlrdquo Acta Armamentarii vol 29 no 8pp 897ndash901 2008
[20] F Gao and H Zhang ldquoStudy of 2-D trajectory correction basedon geomagnetic detection with impulse force for projectilesrdquoJournal of System Simulation vol 23 no 1 pp 123ndash128 2011
[21] X Qian R Lin and Y Zhao Aerothermodynamics of MissileFlight Beijing Institute of Technology Press Beijing China2008
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of








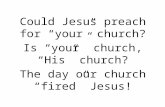


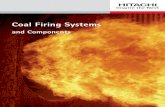

![Research Article Surrogate Assisted Design Optimization of ...downloads.hindawi.com/journals/ijrm/2014/563483.pdf[ ]. e optimization of rotor blade sections of an impulse turbine was](https://static.fdocuments.us/doc/165x107/6075892d3f606d1ded1c2658/research-article-surrogate-assisted-design-optimization-of-e-optimization.jpg)