
Research Article An Adaptive Estimation Scheme for...
7
Hindawi Publishing Corporation Abstract and Applied Analysis Volume 2013, Article ID 481976, 6 pages http://dx.doi.org/10.1155/2013/481976 Research Article An Adaptive Estimation Scheme for Open-Circuit Voltage of Power Lithium-Ion Battery Yun Zhang, Chenghui Zhang, and Naxin Cui School of Control Science and Engineering, Shandong University, Jinan 250061, China Correspondence should be addressed to Chenghui Zhang; [email protected] Received 29 October 2013; Accepted 8 December 2013 Academic Editor: Qi-Ru Wang Copyright © 2013 Yun Zhang et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Open-circuit voltage (OCV) is one of the most important parameters in determining state of charge (SoC) of power battery. e direct measurement of it is costly and time consuming. is paper describes an adaptive scheme that can be used to derive OCV of the power battery. e scheme only uses the measurable input (terminal current) and the measurable output (terminal voltage) signals of the battery system and is simple enough to enable online implement. Firstly an equivalent circuit model is employed to describe the polarization characteristic and the dynamic behavior of the lithium-ion battery; the state-space representation of the electrical performance for the battery is obtained based on the equivalent circuit model. en the implementation procedure of the adaptive scheme is given; also the asymptotic convergence of the observer error and the boundedness of all the parameter estimates are proven. Finally, experiments are carried out, and the effectiveness of the adaptive estimation scheme is validated by the experimental results. 1. Introduction Electric vehicles (EVs) and hybrid electric vehicles (HEVs) have been getting more and more attention in recent years because they have the potential of improving the fuel effi- ciency and reducing the pollutant emissions [1]. e merits of the high energy density, high power density, no memory effect, and experience of low self-discharge when not in use compared to other batteries make the lithium-ion batteries the main contender for energy storage in EV/HEVs [2, 3]. Open-circuit voltage (OCV) is one of the most important parameters of a battery due to the intrinsic relationship between state of charge (SoC) and OCV [4, 5], which is defined as the measured terminal voltage when battery reaches steady-state. To the authors’ best knowledge there only exist two methods to get the value of OCV: experiment test and online estimation. e former method is very time consuming because the battery needs rest 10 h or more to reach the steady-state when charging or discharging at each measurement. Reference [6] has proposed a rapid test method, and the pause time at different SoC needs only one minute before the new experiment test is carried out. e voltage that reaches steady-state during the pauses at different SoC during discharging and charging is connected with line, and then the value of OCV takes the mean of the lines. is way can significantly save test time, but however the conventional experiment method or the new experiment method is suitable for measurement in laboratory, but not suitable for online measurement. e latter method is based on the equivalent circuit model to estimate OCV. e voltage of the electromotive force [7] or the voltage across the bulk capacitor [8, 9] is used to denote OCV. In this method, the parameter (capacitors and resistances) values of the equivalent circuit are generally considered to be constant, which contradict the fact that all parameter values usually change along with the SoC, temperature, and usage history change, and then the estimate precision will be degraded due to the inaccuracy of parameter values. us new theory and new method are demanded to enrich the estimate method and enhance the estimate accuracy. Adaptive technology is undoubtedly the best choice to solve such problem. Battery is a complex electrochemical system; the accurate modeling for it is more difficult. As the adaptive scheme is implemented easily and the modeling error is within an acceptable range, the evenin battery model that includes one RC network is adopted here. e state-space formulation
Transcript of Research Article An Adaptive Estimation Scheme for...
Hindawi Publishing CorporationAbstract and Applied AnalysisVolume 2013 Article ID 481976 6 pageshttpdxdoiorg1011552013481976
Research ArticleAn Adaptive Estimation Scheme for Open-CircuitVoltage of Power Lithium-Ion Battery
Yun Zhang Chenghui Zhang and Naxin Cui
School of Control Science and Engineering Shandong University Jinan 250061 China
Correspondence should be addressed to Chenghui Zhang zchuisdueducn
Received 29 October 2013 Accepted 8 December 2013
Academic Editor Qi-Ru Wang
Copyright copy 2013 Yun Zhang et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Open-circuit voltage (OCV) is one of the most important parameters in determining state of charge (SoC) of power battery Thedirect measurement of it is costly and time consuming This paper describes an adaptive scheme that can be used to derive OCVof the power battery The scheme only uses the measurable input (terminal current) and the measurable output (terminal voltage)signals of the battery system and is simple enough to enable online implement Firstly an equivalent circuit model is employedto describe the polarization characteristic and the dynamic behavior of the lithium-ion battery the state-space representation ofthe electrical performance for the battery is obtained based on the equivalent circuit model Then the implementation procedureof the adaptive scheme is given also the asymptotic convergence of the observer error and the boundedness of all the parameterestimates are proven Finally experiments are carried out and the effectiveness of the adaptive estimation scheme is validated bythe experimental results
1 Introduction
Electric vehicles (EVs) and hybrid electric vehicles (HEVs)have been getting more and more attention in recent yearsbecause they have the potential of improving the fuel effi-ciency and reducing the pollutant emissions [1] The meritsof the high energy density high power density no memoryeffect and experience of low self-discharge when not in usecompared to other batteries make the lithium-ion batteriesthe main contender for energy storage in EVHEVs [2 3]
Open-circuit voltage (OCV) is one of the most importantparameters of a battery due to the intrinsic relationshipbetween state of charge (SoC) and OCV [4 5] whichis defined as the measured terminal voltage when batteryreaches steady-state To the authorsrsquo best knowledge thereonly exist two methods to get the value of OCV experimenttest and online estimation The former method is very timeconsuming because the battery needs rest 10 h or moreto reach the steady-state when charging or discharging ateach measurement Reference [6] has proposed a rapid testmethod and the pause time at different SoC needs only oneminute before the new experiment test is carried out Thevoltage that reaches steady-state during the pauses at different
SoC during discharging and charging is connected with lineand then the value of OCV takes the mean of the linesThis way can significantly save test time but however theconventional experiment method or the new experimentmethod is suitable for measurement in laboratory but notsuitable for online measurement The latter method is basedon the equivalent circuit model to estimate OCVThe voltageof the electromotive force [7] or the voltage across the bulkcapacitor [8 9] is used to denote OCV In this methodthe parameter (capacitors and resistances) values of theequivalent circuit are generally considered to be constantwhich contradict the fact that all parameter values usuallychange along with the SoC temperature and usage historychange and then the estimate precision will be degraded dueto the inaccuracy of parameter values Thus new theory andnew method are demanded to enrich the estimate methodand enhance the estimate accuracy Adaptive technology isundoubtedly the best choice to solve such problem
Battery is a complex electrochemical system the accuratemodeling for it is more difficult As the adaptive schemeis implemented easily and the modeling error is within anacceptable range the Thevenin battery model that includesone RC network is adopted hereThe state-space formulation
2 Abstract and Applied Analysis
is obtained based on the equivalent circuit model and anadaptive observer is designed according to the feature ofthe state-space The designed adaptive observer togetherwith the update laws gives accurate estimate of the truestates but does not give the accurate estimate of the trueparameters which can only guarantee the boundedness ofall the parameter estimates Fortunately the estimate of someparameters change in the same proportion and the estimateof OCV is the quotient of them thus the accurate estimate ofOCV can be obtained
The remainder of this paper is organized as followsSection 2 presents the main results of this paper InSection 21 a dynamic equivalent circuit model is chosenand the state-space formulation is obtained based on theequivalent circuitmodel in Section 22 the adaptive observerand adaptive laws are designed Section 3 provides theexperimental results to demonstrate the correctness of theproposed adaptive estimate scheme This paper ends withsome conclusions
2 Modeling Adaptive Observerand Adaptive Laws Design
In this section an appropriate model of the battery is chosenfirstly and then the dynamic characteristic of the batterysystem is described by differential equations The designprocedure of the adaptive observer and adaptive laws will beshown step by step at last
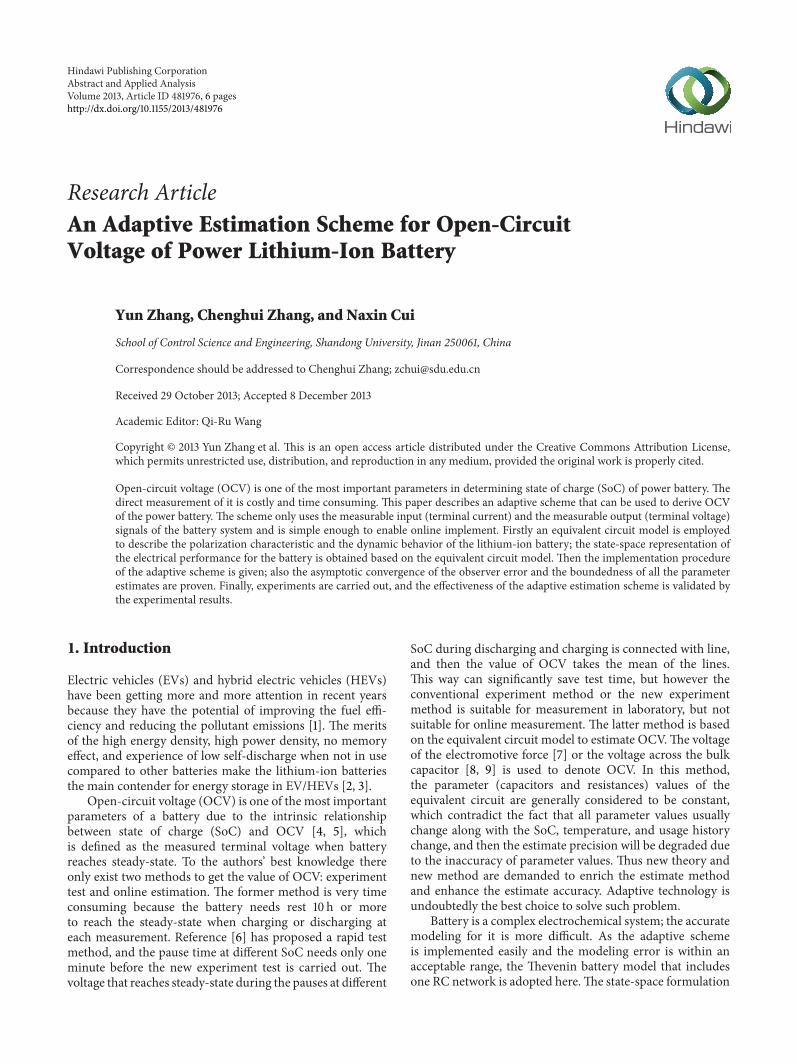
21 Modeling The principle of selecting a battery model isas simple as possible but precise enough for the investigatedproblem The model chosen here is the first-order Theveninmodel (see Figure 1) which is simple yet accurate enough forthe control-oriented purpose in hybrid electric vehicles [1]The parallel RC-branch comprising 119877119901 and 119862119901 is used tomodel battery polarization effect 119877 denotes the ohmic resis-tance 119906oc denotes the open circuit voltage and 119906119905 denotes theterminal voltage 119868 denotes the terminal current and assumesit is positive when discharge otherwise is negative Based onthe Kirchhoff rsquos law the electrical behavior of the circuit canbe characterized as follows
119901 = minus1
119862119901119877119901
119906119901 +1
119862119901
119868
119906119905 = 119906oc minus 119877119868 minus 119906119901
(1)
From (1) the derivative of 119906119905 can be obtained as
119906119905 = oc minus 119868 minus 119877 119868 minus 119906119901
asymp minus119877 119868 +1
119862119901119877119901
119906119901 minus1
119862119901
119868
= minus119877 119868 +1
119862119901119877119901
(119906oc minus 119877119868 minus 119906119905) minus1
119862119901
119868
= minus1
119862119901119877119901
119906119905 minus
119877 + 119877119901
119862119901119877119901
119868 minus 119877 119868 +1
119862119901119877119901
119906oc
(2)
Remark 1 The parameters 119877 119877119901 and 119862119901 are functions oftime SoC and temperature but the partial differential ofthem is treated as zero due to the reason that the change rateis very slow with respect to the signals sampling period (thesampling period is 1 s) For the same reason oc asymp 0
22 Adaptive Observer and Adaptive Laws Design This sub-section is devoted to the constructive design of the adaptiveobserver and the update laws To this end choose 1205791 =1119862119901119877119901 1205792 = (119877 + 119877119901)119862119901119877119901 1205793 = 119877 1205794 = (1119862119901119877119901)119906octhen (2) can be rewritten as
119905 = minus1205791119906119905 minus 1205792119868 minus 1205793119868 + 1205794 (3)
obviously 119906oc = 12057941205791Enlightened by [10] we design adaptive observer (4) for
system (3) as well as for system (2) as follows119906119905 = minus1205791119906119905 minus 1205792119868 minus 1205793
119868 + 1205794 + 119871 (119906119905 minus 119905) (4)
where 119905 is the estimate of 119906119905 and 119871 is the observer gain Theparameters 120579119894 (119894 = 1 4) are estimates of the parameters120579119894 (119894 = 1 4) which will be adjusted adaptively such that119905 rarr 119906119905 as 119905 rarr infin
Subtracting (4) from (3) the dynamic of observer error119890 = 119906119905 minus 119905 is as follows
119890 = minus1205791119906119905 minus 1205792119868 minus 1205793119868 + 1205794 minus 119871119890 (5)
where 120579119894 = 120579119894 minus 120579119894 (119894 = 1 4)The following Barbalatrsquos lemma that will be used in the
development of our main results is given first
Lemma 2 (see [11]) If the differentiable function 119891(119905) has afinite limit as 119905 rarr infin and if 119891 is uniformly continuous then119891(119905) rarr 0 as 119905 rarr infin
The proof can be found in the reference and is omittedhere
To guarantee the asymptotical convergence of observererror system (5) and the boundedness of signals 120579119894 (119894 =1 4) we have the following theorem
Theorem 3 Consider battery system (2) as well as its para-metric form (3) design the observer (4) if one chooses theparameter update laws for 120579119894 (119894 = 1 4) as
1205791 = minus1198881119890119906119905
1205792 = minus1198882119890119868
1205793 = minus1198883119890
1198681205794 = 1198884119890
119888119894 gt 0 119894 = 1 4
(6)
and the observer gain 119871 gt 0 then the signal 119890 is convergent tozero as 119905 rarr infin and all the signals 120579119894 (119894 = 1 4) areuniformly bounded
Proof Define a candidate Lyapunov function
119881 =1
21198902+1
2
4
sum
119894=1
(1
119888119894
1205792
119894) 119888119894 gt 0 119894 = 1 4 (7)
Abstract and Applied Analysis 3
Cp
RpR
utI
uoc
minus
+
Figure 1 Thevenin equivalent model for lithium-ion battery
from this together with (5) and (6) we have
= 119890 119890 minus
4
sum
119894=1
1
119888119894
120579119894120579119894
= minus1198901205791119906119905 minus 1198901205792119868 minus 1198901205793119868 + 1198901205794
minus 119890119871 (119906119905 minus 119905) minus1
1198881
12057911205791 minus
1
1198882
12057921205792 minus
1
1198883
12057931205793 minus
1
1198884
12057941205794
= minus1205791 (119890119906119905 +1
1198881
1205791) minus 1205792 (119890119868 +
1
1198882
1205792)
minus 1205793 (119890119868 +1
1198883
1205793) minus 1205794 (119890 minus
1
1198884
1205794) minus 119890119871 (119906119905 minus 119905)
= minus1198711198902le 0
(8)
Thus 119881(119905) is a nonincreasing function of time that is
sup119905ge0
119881 (119905) le 119881 (0) (9)
This proves that 119890 and 120579119894 (119894 = 1 4) remain bounded for all119905 ge 0 namely
lim119905rarrinfin
119890 (119905) lt infin lim119905rarrinfin
10038161003816100381610038161003816120579119894 (119905)
10038161003816100381610038161003816lt infin 119894 = 1 4 (10)
The derivative of is (119905) = 2119871119890(1205791119906119905 + 1205792119868 + 1205793 119868 minus 1205794 +119871(119906119905 minus 119905)) this shows that (119905) is bounded since 119890 and120579119894 (119894 = 1 4) are bounded Hence (119905) is uniformlycontinuous After the application of Barbalatrsquos lemma weobtain the conclusion that 119890 rarr 0 as 119905 rarr infin
From (10) and the definition 120579119894 = 120579119894 minus120579119894 (119894 = 1 4) weknow that 120579119894 (119894 = 1 4) are bounded
Thus we obtain the conclusion of the asymptotical con-vergence to zero of the signal 119890 and the uniform boundednessof the signals 120579119894 (119894 = 1 4)
3 Experimental Results
There are three purposes for the experiment the first one isto verify the adaptive observer which can give an accurateestimate of the system states the second one is to verify theestimates of the parameters 1205791 and 1205794 which change with thesame scaling proportionThe fact that OCV can be estimatedby 12057941205791 will be verified at last
0 10 20 30 40 50 60 70 80505
51
515
52
525
53
535
Time (s)
Term
inal
vol
tage
(V)
Fitting curveResponse curve
V1
V2
Figure 2 Terminal voltage response under step-current discharge
31 Parameter Extraction The extraction experiment thatcan obtain the parameters value is firstly carried out Theexperimental sample is a large size lithium iron phosphatebattery The nominal capacity and voltage of the selectedbattery is 50Ah and 512 V respectively The tests are carriedout on an AVL e-Storage Tester The tester is capable ofcharging and discharging the battery at a maximum rate of285A It can operate in several modes such as alternatingcurrent and constant current It comprises power currentvoltage and temperature measurements The battery testerand the data logger are connected to a PC through a bussystem The host computer with the installed software canprogram the experiment procedure Several limits for thebattery can be defined which are necessary in order to avoiddamage for example caused by overcharging
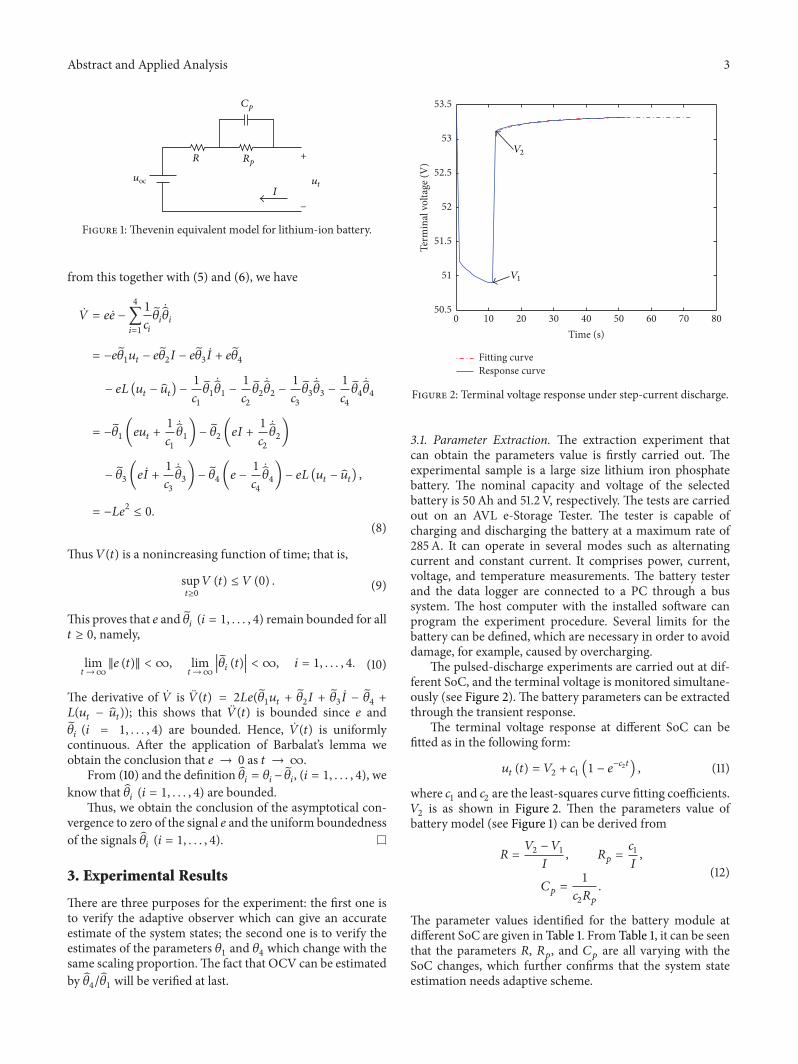
The pulsed-discharge experiments are carried out at dif-ferent SoC and the terminal voltage is monitored simultane-ously (see Figure 2) The battery parameters can be extractedthrough the transient response
The terminal voltage response at different SoC can befitted as in the following form
119906119905 (119905) = 1198812 + 1198881 (1 minus 119890minus1198882119905) (11)
where 1198881 and 1198882 are the least-squares curve fitting coefficients1198812 is as shown in Figure 2 Then the parameters value ofbattery model (see Figure 1) can be derived from
119877 =1198812 minus 1198811
119868 119877119901 =
1198881
119868
119862119901 =1
1198882119877119901
(12)
The parameter values identified for the battery module atdifferent SoC are given in Table 1 From Table 1 it can be seenthat the parameters 119877 119877119901 and 119862119901 are all varying with theSoC changes which further confirms that the system stateestimation needs adaptive scheme
4 Abstract and Applied Analysis
0 20 40 60 80 100 120 140 160minus20
minus15
minus10
minus5
0
5
10
15
20
Time (s)
Curr
ent (
A)
(a)
0 20 40 60 80 100 120 140 160532
534
536
538
54
542
544
546
548
55
Time (s)
ut
(V)
utEstimated value of utTrue value of
(b)
0 20 40 60 80 100 120 140 160minus01
minus005
0
005
01
015
Time (s)
Erro
r (V
)
(c)
Figure 3 Comparison of the true and estimated battery terminal voltage
Table 1 Model parameter values list identified for the battery module
SoC 01 02 03 04 05 06 07 08 09 10119877 (Ω) 005028 004882 004796 00471 004626 004564 004542 00448 004418 00438119877119901 (Ω) 0008786 0007328 000647 0005808 0005254 0005232 0004908 000481 0004142 0003978119862119901 (F) 960 1297 1569 19067 21506 22225 30593 2315 2847 2913119880oc (V) 51459 5218 52658 52758 52808 53078 53387 53394 53406 54108
32 Experiment Validation This subsection is to validatethe correctness of the theory of Section 22 The urbandynamometer driving schedule (UDDS) driving cycle ofAdvisor is adopted to generate terminal current (see Figure3(a)) According to the parameter values at SoC = 10 (seeTable 1) set the initial conditions of system (3) to be 119906119905(0) =54108 1205791 = 00863 1205792 = 000412 1205793 = 00438 and 1205794 = 467and set the initial conditions of observer system (4) to be
119905 = 51459 1205791(0) = 00833 1205792(0) = 00035 1205793(0) = 0043and 1205794(0) = 4 Set coefficients of update laws (6) to be 1198881 = 011198882 = 01 1198883 = 01 and 1198884 = 01 and set the observer gain tobe 119871 = 2 The experiment results are shown in Figures 3ndash5
Figure 3(a) is the system input namely battery terminalcurrent Figure 3(b) is the original and observer systemoutputs The observer error is shown in Figure 3(c) fromwhich we can see that the observer error converges to zero
Abstract and Applied Analysis 5
0 20 40 60 80 100 120 140 160004
005
006
007
008
00901
Time (s)
1205791
Estimated value of 1205791True value of 1205791
(a)
0 20 40 60 80 100 120 140 16025
3
35
4
45
5
Time (s)
Estimated value of 1205792
1205792
True value of 1205792
times10minus3
(b)
0 20 40 60 80 100 120 140 16000428
0043
00432
00434
00436
00438
0044
00442
00444
Time (s)
Estimated value of 1205793
1205793
True value of 1205793
(c)
0 20 40 60 80 100 120 140 16039
4
41
42
43
44
45
46
47
Time (s)
Estimated value of 1205794
1205794
True value of 1205794
(d)
0 20 40 60 80 100 120 140 160minus04
minus02
0
02
04
06
08
1
Time (s)
s1minuss4
(e)
Figure 4 Comparison of the true and estimated parameters value for the equivalent circuit model
within twelve seconds although the parameter values oforiginal system and observer system are different
Figures 4(a)ndash4(d) are the true and estimated values ofthe parameters 120579119894 (119894 = 1 4) from which we can see thatthe estimated values of the parameters are bounded Assumethat the scaling of the estimated values of 1205791 and 1205794 is 1199041 =12057911205791 and 1199044 = 12057941205794 accordingly Figure 4(e) shows that thedifference of 1199041 and 1199044 is approximately zero In other words
1199041 asymp 1199044 so the estimated value of 119906oc can be obtained from12057941205791
Figures 5(a) and 5(b) are the true and estimated batteryOCV and the estimated error It can be seen that the adaptiveobserver designed here can estimate the OCV accurately
Remark 4 Battery discharging at a constant current value15 A from SoC = 10 to SoC = 01 takes 10800 s (which does
6 Abstract and Applied Analysis
0 20 40 60 80 100 120 140 16040
50
60
70
80
90
100
Time (s)
uoc
(V)
Estimated value of uoc
True value of uoc
(a)
0 20 40 60 80 100 120 140 160minus40
minus30
minus20
minus10
0
10
20
Time (s)
Erro
r (V
)(b)
Figure 5 Comparison of the true and estimated battery open-circuit voltage
not include the standing time of the discharge experiment)119906oc changes from the maximum 54108V to the minimum51459V so 119906oc is considered to be a constant when discharg-ing and charging for tens of seconds
4 Conclusions
In this paper an adaptive observer is designed to estimateOCV of a lithium-ion battery pack The parameter values ofthe battery equivalent circuit model are extracted throughnonlinear fittingThe performance of the proposed estimatoris confirmed by a series of experiment results The validityresults show that the estimator has a good performance underthe condition that it has no requirement for knowing theexact parameter values
Acknowledgments
The authors are grateful to the editor and reviewers for theircomments and suggestions This work was supported bythe National Natural Science Foundation of China (Grantsnumbers 61034007 61273097 61104034 and 61104087) andResearch Fund for the Doctoral Programme of HigherEducation of China (Grant number 20120131130007)
References
[1] S TianMNHong andMGOuyang ldquoAn experimental studyand nonlinear modeling of discharge I-V behavior of valve-regulated lead-acid batteriesrdquo IEEE Transactions on EnergyConversion vol 24 no 2 pp 452ndash458 2009
[2] M Armand and J-M Tarascon ldquoBuilding better batteriesrdquoNature vol 451 no 7179 pp 652ndash657 2008
[3] V Ramadesigan P W C Northrop S De S SanthanagopalanR D Braatz and V R Subramanian ldquoModeling and simulation
of lithium-ion batteries from a systems engineering perspec-tiverdquo Journal of the Electrochemical Society vol 159 no 3 ppR31ndashR45 2012
[4] S Lee J Kim J Lee and B H Cho ldquoState-of-charge and capac-ity estimation of lithium-ion battery using a new open-circuitvoltage versus state-of-chargerdquo Journal of Power Sources vol185 no 1-2 pp 1367ndash1373 2008
[5] N A Windarko and J Choi ldquoSOC estimation based on OCVfor NiMH batteries using an improved Takacs modelrdquo Journalof Power Electronics vol 10 no 2 pp 181ndash186 2010
[6] S Abu-Sharkh and D Doerffel ldquoRapid test and non-linearmodel characterisation of solid-state lithium-ion batteriesrdquoJournal of Power Sources vol 130 no 1-2 pp 266ndash274 2004
[7] J H Kim and B H Cho ldquoState-of-charge estimation and state-of-health prediction of a Li-ion degraded battery based on anEKF combined with a per-unit systemrdquo IEEE Transactions onVehicular Technology vol 60 no 9 pp 4249ndash4260 2011
[8] B S Bhangu P Bentley D A Stone and C M BinghamldquoNonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehiclesrdquoIEEE Transactions on Vehicular Technology vol 54 no 3 pp783ndash794 2005
[9] F Zhang G J Liu L J Fang and H G Wang ldquoEstimationof battery state of charge with 119867infin observer applied to a robotfor inspecting power transmission linesrdquo IEEE Transactions onIndustrial Electronics vol 59 no 2 pp 1086ndash1095 2012
[10] G Luders and K S Narendra ldquoAn adaptive observer and iden-tifier for a linear systemrdquo IEEE Transactions on AutomaticControl vol 18 no 5 pp 496ndash499 1973
[11] J J E Slotine and W P Li Applied Nonlinear Control PrenticeHall New Jersey NJ USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Abstract and Applied Analysis
is obtained based on the equivalent circuit model and anadaptive observer is designed according to the feature ofthe state-space The designed adaptive observer togetherwith the update laws gives accurate estimate of the truestates but does not give the accurate estimate of the trueparameters which can only guarantee the boundedness ofall the parameter estimates Fortunately the estimate of someparameters change in the same proportion and the estimateof OCV is the quotient of them thus the accurate estimate ofOCV can be obtained
The remainder of this paper is organized as followsSection 2 presents the main results of this paper InSection 21 a dynamic equivalent circuit model is chosenand the state-space formulation is obtained based on theequivalent circuitmodel in Section 22 the adaptive observerand adaptive laws are designed Section 3 provides theexperimental results to demonstrate the correctness of theproposed adaptive estimate scheme This paper ends withsome conclusions
2 Modeling Adaptive Observerand Adaptive Laws Design
In this section an appropriate model of the battery is chosenfirstly and then the dynamic characteristic of the batterysystem is described by differential equations The designprocedure of the adaptive observer and adaptive laws will beshown step by step at last
21 Modeling The principle of selecting a battery model isas simple as possible but precise enough for the investigatedproblem The model chosen here is the first-order Theveninmodel (see Figure 1) which is simple yet accurate enough forthe control-oriented purpose in hybrid electric vehicles [1]The parallel RC-branch comprising 119877119901 and 119862119901 is used tomodel battery polarization effect 119877 denotes the ohmic resis-tance 119906oc denotes the open circuit voltage and 119906119905 denotes theterminal voltage 119868 denotes the terminal current and assumesit is positive when discharge otherwise is negative Based onthe Kirchhoff rsquos law the electrical behavior of the circuit canbe characterized as follows
119901 = minus1
119862119901119877119901
119906119901 +1
119862119901
119868
119906119905 = 119906oc minus 119877119868 minus 119906119901
(1)
From (1) the derivative of 119906119905 can be obtained as
119906119905 = oc minus 119868 minus 119877 119868 minus 119906119901
asymp minus119877 119868 +1
119862119901119877119901
119906119901 minus1
119862119901
119868
= minus119877 119868 +1
119862119901119877119901
(119906oc minus 119877119868 minus 119906119905) minus1
119862119901
119868
= minus1
119862119901119877119901
119906119905 minus
119877 + 119877119901
119862119901119877119901
119868 minus 119877 119868 +1
119862119901119877119901
119906oc
(2)
Remark 1 The parameters 119877 119877119901 and 119862119901 are functions oftime SoC and temperature but the partial differential ofthem is treated as zero due to the reason that the change rateis very slow with respect to the signals sampling period (thesampling period is 1 s) For the same reason oc asymp 0
22 Adaptive Observer and Adaptive Laws Design This sub-section is devoted to the constructive design of the adaptiveobserver and the update laws To this end choose 1205791 =1119862119901119877119901 1205792 = (119877 + 119877119901)119862119901119877119901 1205793 = 119877 1205794 = (1119862119901119877119901)119906octhen (2) can be rewritten as
119905 = minus1205791119906119905 minus 1205792119868 minus 1205793119868 + 1205794 (3)
obviously 119906oc = 12057941205791Enlightened by [10] we design adaptive observer (4) for
system (3) as well as for system (2) as follows119906119905 = minus1205791119906119905 minus 1205792119868 minus 1205793
119868 + 1205794 + 119871 (119906119905 minus 119905) (4)
where 119905 is the estimate of 119906119905 and 119871 is the observer gain Theparameters 120579119894 (119894 = 1 4) are estimates of the parameters120579119894 (119894 = 1 4) which will be adjusted adaptively such that119905 rarr 119906119905 as 119905 rarr infin
Subtracting (4) from (3) the dynamic of observer error119890 = 119906119905 minus 119905 is as follows
119890 = minus1205791119906119905 minus 1205792119868 minus 1205793119868 + 1205794 minus 119871119890 (5)
where 120579119894 = 120579119894 minus 120579119894 (119894 = 1 4)The following Barbalatrsquos lemma that will be used in the
development of our main results is given first
Lemma 2 (see [11]) If the differentiable function 119891(119905) has afinite limit as 119905 rarr infin and if 119891 is uniformly continuous then119891(119905) rarr 0 as 119905 rarr infin
The proof can be found in the reference and is omittedhere
To guarantee the asymptotical convergence of observererror system (5) and the boundedness of signals 120579119894 (119894 =1 4) we have the following theorem
Theorem 3 Consider battery system (2) as well as its para-metric form (3) design the observer (4) if one chooses theparameter update laws for 120579119894 (119894 = 1 4) as
1205791 = minus1198881119890119906119905
1205792 = minus1198882119890119868
1205793 = minus1198883119890
1198681205794 = 1198884119890
119888119894 gt 0 119894 = 1 4
(6)
and the observer gain 119871 gt 0 then the signal 119890 is convergent tozero as 119905 rarr infin and all the signals 120579119894 (119894 = 1 4) areuniformly bounded
Proof Define a candidate Lyapunov function
119881 =1
21198902+1
2
4
sum
119894=1
(1
119888119894
1205792
119894) 119888119894 gt 0 119894 = 1 4 (7)
Abstract and Applied Analysis 3
Cp
RpR
utI
uoc
minus
+
Figure 1 Thevenin equivalent model for lithium-ion battery
from this together with (5) and (6) we have
= 119890 119890 minus
4
sum
119894=1
1
119888119894
120579119894120579119894
= minus1198901205791119906119905 minus 1198901205792119868 minus 1198901205793119868 + 1198901205794
minus 119890119871 (119906119905 minus 119905) minus1
1198881
12057911205791 minus
1
1198882
12057921205792 minus
1
1198883
12057931205793 minus
1
1198884
12057941205794
= minus1205791 (119890119906119905 +1
1198881
1205791) minus 1205792 (119890119868 +
1
1198882
1205792)
minus 1205793 (119890119868 +1
1198883
1205793) minus 1205794 (119890 minus
1
1198884
1205794) minus 119890119871 (119906119905 minus 119905)
= minus1198711198902le 0
(8)
Thus 119881(119905) is a nonincreasing function of time that is
sup119905ge0
119881 (119905) le 119881 (0) (9)
This proves that 119890 and 120579119894 (119894 = 1 4) remain bounded for all119905 ge 0 namely
lim119905rarrinfin
119890 (119905) lt infin lim119905rarrinfin
10038161003816100381610038161003816120579119894 (119905)
10038161003816100381610038161003816lt infin 119894 = 1 4 (10)
The derivative of is (119905) = 2119871119890(1205791119906119905 + 1205792119868 + 1205793 119868 minus 1205794 +119871(119906119905 minus 119905)) this shows that (119905) is bounded since 119890 and120579119894 (119894 = 1 4) are bounded Hence (119905) is uniformlycontinuous After the application of Barbalatrsquos lemma weobtain the conclusion that 119890 rarr 0 as 119905 rarr infin
From (10) and the definition 120579119894 = 120579119894 minus120579119894 (119894 = 1 4) weknow that 120579119894 (119894 = 1 4) are bounded
Thus we obtain the conclusion of the asymptotical con-vergence to zero of the signal 119890 and the uniform boundednessof the signals 120579119894 (119894 = 1 4)
3 Experimental Results
There are three purposes for the experiment the first one isto verify the adaptive observer which can give an accurateestimate of the system states the second one is to verify theestimates of the parameters 1205791 and 1205794 which change with thesame scaling proportionThe fact that OCV can be estimatedby 12057941205791 will be verified at last
0 10 20 30 40 50 60 70 80505
51
515
52
525
53
535
Time (s)
Term
inal
vol
tage
(V)
Fitting curveResponse curve
V1
V2
Figure 2 Terminal voltage response under step-current discharge
31 Parameter Extraction The extraction experiment thatcan obtain the parameters value is firstly carried out Theexperimental sample is a large size lithium iron phosphatebattery The nominal capacity and voltage of the selectedbattery is 50Ah and 512 V respectively The tests are carriedout on an AVL e-Storage Tester The tester is capable ofcharging and discharging the battery at a maximum rate of285A It can operate in several modes such as alternatingcurrent and constant current It comprises power currentvoltage and temperature measurements The battery testerand the data logger are connected to a PC through a bussystem The host computer with the installed software canprogram the experiment procedure Several limits for thebattery can be defined which are necessary in order to avoiddamage for example caused by overcharging
The pulsed-discharge experiments are carried out at dif-ferent SoC and the terminal voltage is monitored simultane-ously (see Figure 2) The battery parameters can be extractedthrough the transient response
The terminal voltage response at different SoC can befitted as in the following form
119906119905 (119905) = 1198812 + 1198881 (1 minus 119890minus1198882119905) (11)
where 1198881 and 1198882 are the least-squares curve fitting coefficients1198812 is as shown in Figure 2 Then the parameters value ofbattery model (see Figure 1) can be derived from
119877 =1198812 minus 1198811
119868 119877119901 =
1198881
119868
119862119901 =1
1198882119877119901
(12)
The parameter values identified for the battery module atdifferent SoC are given in Table 1 From Table 1 it can be seenthat the parameters 119877 119877119901 and 119862119901 are all varying with theSoC changes which further confirms that the system stateestimation needs adaptive scheme
4 Abstract and Applied Analysis
0 20 40 60 80 100 120 140 160minus20
minus15
minus10
minus5
0
5
10
15
20
Time (s)
Curr
ent (
A)
(a)
0 20 40 60 80 100 120 140 160532
534
536
538
54
542
544
546
548
55
Time (s)
ut
(V)
utEstimated value of utTrue value of
(b)
0 20 40 60 80 100 120 140 160minus01
minus005
0
005
01
015
Time (s)
Erro
r (V
)
(c)
Figure 3 Comparison of the true and estimated battery terminal voltage
Table 1 Model parameter values list identified for the battery module
SoC 01 02 03 04 05 06 07 08 09 10119877 (Ω) 005028 004882 004796 00471 004626 004564 004542 00448 004418 00438119877119901 (Ω) 0008786 0007328 000647 0005808 0005254 0005232 0004908 000481 0004142 0003978119862119901 (F) 960 1297 1569 19067 21506 22225 30593 2315 2847 2913119880oc (V) 51459 5218 52658 52758 52808 53078 53387 53394 53406 54108
32 Experiment Validation This subsection is to validatethe correctness of the theory of Section 22 The urbandynamometer driving schedule (UDDS) driving cycle ofAdvisor is adopted to generate terminal current (see Figure3(a)) According to the parameter values at SoC = 10 (seeTable 1) set the initial conditions of system (3) to be 119906119905(0) =54108 1205791 = 00863 1205792 = 000412 1205793 = 00438 and 1205794 = 467and set the initial conditions of observer system (4) to be
119905 = 51459 1205791(0) = 00833 1205792(0) = 00035 1205793(0) = 0043and 1205794(0) = 4 Set coefficients of update laws (6) to be 1198881 = 011198882 = 01 1198883 = 01 and 1198884 = 01 and set the observer gain tobe 119871 = 2 The experiment results are shown in Figures 3ndash5
Figure 3(a) is the system input namely battery terminalcurrent Figure 3(b) is the original and observer systemoutputs The observer error is shown in Figure 3(c) fromwhich we can see that the observer error converges to zero
Abstract and Applied Analysis 5
0 20 40 60 80 100 120 140 160004
005
006
007
008
00901
Time (s)
1205791
Estimated value of 1205791True value of 1205791
(a)
0 20 40 60 80 100 120 140 16025
3
35
4
45
5
Time (s)
Estimated value of 1205792
1205792
True value of 1205792
times10minus3
(b)
0 20 40 60 80 100 120 140 16000428
0043
00432
00434
00436
00438
0044
00442
00444
Time (s)
Estimated value of 1205793
1205793
True value of 1205793
(c)
0 20 40 60 80 100 120 140 16039
4
41
42
43
44
45
46
47
Time (s)
Estimated value of 1205794
1205794
True value of 1205794
(d)
0 20 40 60 80 100 120 140 160minus04
minus02
0
02
04
06
08
1
Time (s)
s1minuss4
(e)
Figure 4 Comparison of the true and estimated parameters value for the equivalent circuit model
within twelve seconds although the parameter values oforiginal system and observer system are different
Figures 4(a)ndash4(d) are the true and estimated values ofthe parameters 120579119894 (119894 = 1 4) from which we can see thatthe estimated values of the parameters are bounded Assumethat the scaling of the estimated values of 1205791 and 1205794 is 1199041 =12057911205791 and 1199044 = 12057941205794 accordingly Figure 4(e) shows that thedifference of 1199041 and 1199044 is approximately zero In other words
1199041 asymp 1199044 so the estimated value of 119906oc can be obtained from12057941205791
Figures 5(a) and 5(b) are the true and estimated batteryOCV and the estimated error It can be seen that the adaptiveobserver designed here can estimate the OCV accurately
Remark 4 Battery discharging at a constant current value15 A from SoC = 10 to SoC = 01 takes 10800 s (which does
6 Abstract and Applied Analysis
0 20 40 60 80 100 120 140 16040
50
60
70
80
90
100
Time (s)
uoc
(V)
Estimated value of uoc
True value of uoc
(a)
0 20 40 60 80 100 120 140 160minus40
minus30
minus20
minus10
0
10
20
Time (s)
Erro
r (V
)(b)
Figure 5 Comparison of the true and estimated battery open-circuit voltage
not include the standing time of the discharge experiment)119906oc changes from the maximum 54108V to the minimum51459V so 119906oc is considered to be a constant when discharg-ing and charging for tens of seconds
4 Conclusions
In this paper an adaptive observer is designed to estimateOCV of a lithium-ion battery pack The parameter values ofthe battery equivalent circuit model are extracted throughnonlinear fittingThe performance of the proposed estimatoris confirmed by a series of experiment results The validityresults show that the estimator has a good performance underthe condition that it has no requirement for knowing theexact parameter values
Acknowledgments
The authors are grateful to the editor and reviewers for theircomments and suggestions This work was supported bythe National Natural Science Foundation of China (Grantsnumbers 61034007 61273097 61104034 and 61104087) andResearch Fund for the Doctoral Programme of HigherEducation of China (Grant number 20120131130007)
References
[1] S TianMNHong andMGOuyang ldquoAn experimental studyand nonlinear modeling of discharge I-V behavior of valve-regulated lead-acid batteriesrdquo IEEE Transactions on EnergyConversion vol 24 no 2 pp 452ndash458 2009
[2] M Armand and J-M Tarascon ldquoBuilding better batteriesrdquoNature vol 451 no 7179 pp 652ndash657 2008
[3] V Ramadesigan P W C Northrop S De S SanthanagopalanR D Braatz and V R Subramanian ldquoModeling and simulation
of lithium-ion batteries from a systems engineering perspec-tiverdquo Journal of the Electrochemical Society vol 159 no 3 ppR31ndashR45 2012
[4] S Lee J Kim J Lee and B H Cho ldquoState-of-charge and capac-ity estimation of lithium-ion battery using a new open-circuitvoltage versus state-of-chargerdquo Journal of Power Sources vol185 no 1-2 pp 1367ndash1373 2008
[5] N A Windarko and J Choi ldquoSOC estimation based on OCVfor NiMH batteries using an improved Takacs modelrdquo Journalof Power Electronics vol 10 no 2 pp 181ndash186 2010
[6] S Abu-Sharkh and D Doerffel ldquoRapid test and non-linearmodel characterisation of solid-state lithium-ion batteriesrdquoJournal of Power Sources vol 130 no 1-2 pp 266ndash274 2004
[7] J H Kim and B H Cho ldquoState-of-charge estimation and state-of-health prediction of a Li-ion degraded battery based on anEKF combined with a per-unit systemrdquo IEEE Transactions onVehicular Technology vol 60 no 9 pp 4249ndash4260 2011
[8] B S Bhangu P Bentley D A Stone and C M BinghamldquoNonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehiclesrdquoIEEE Transactions on Vehicular Technology vol 54 no 3 pp783ndash794 2005
[9] F Zhang G J Liu L J Fang and H G Wang ldquoEstimationof battery state of charge with 119867infin observer applied to a robotfor inspecting power transmission linesrdquo IEEE Transactions onIndustrial Electronics vol 59 no 2 pp 1086ndash1095 2012
[10] G Luders and K S Narendra ldquoAn adaptive observer and iden-tifier for a linear systemrdquo IEEE Transactions on AutomaticControl vol 18 no 5 pp 496ndash499 1973
[11] J J E Slotine and W P Li Applied Nonlinear Control PrenticeHall New Jersey NJ USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Abstract and Applied Analysis 3
Cp
RpR
utI
uoc
minus
+
Figure 1 Thevenin equivalent model for lithium-ion battery
from this together with (5) and (6) we have
= 119890 119890 minus
4
sum
119894=1
1
119888119894
120579119894120579119894
= minus1198901205791119906119905 minus 1198901205792119868 minus 1198901205793119868 + 1198901205794
minus 119890119871 (119906119905 minus 119905) minus1
1198881
12057911205791 minus
1
1198882
12057921205792 minus
1
1198883
12057931205793 minus
1
1198884
12057941205794
= minus1205791 (119890119906119905 +1
1198881
1205791) minus 1205792 (119890119868 +
1
1198882
1205792)
minus 1205793 (119890119868 +1
1198883
1205793) minus 1205794 (119890 minus
1
1198884
1205794) minus 119890119871 (119906119905 minus 119905)
= minus1198711198902le 0
(8)
Thus 119881(119905) is a nonincreasing function of time that is
sup119905ge0
119881 (119905) le 119881 (0) (9)
This proves that 119890 and 120579119894 (119894 = 1 4) remain bounded for all119905 ge 0 namely
lim119905rarrinfin
119890 (119905) lt infin lim119905rarrinfin
10038161003816100381610038161003816120579119894 (119905)
10038161003816100381610038161003816lt infin 119894 = 1 4 (10)
The derivative of is (119905) = 2119871119890(1205791119906119905 + 1205792119868 + 1205793 119868 minus 1205794 +119871(119906119905 minus 119905)) this shows that (119905) is bounded since 119890 and120579119894 (119894 = 1 4) are bounded Hence (119905) is uniformlycontinuous After the application of Barbalatrsquos lemma weobtain the conclusion that 119890 rarr 0 as 119905 rarr infin
From (10) and the definition 120579119894 = 120579119894 minus120579119894 (119894 = 1 4) weknow that 120579119894 (119894 = 1 4) are bounded
Thus we obtain the conclusion of the asymptotical con-vergence to zero of the signal 119890 and the uniform boundednessof the signals 120579119894 (119894 = 1 4)
3 Experimental Results
There are three purposes for the experiment the first one isto verify the adaptive observer which can give an accurateestimate of the system states the second one is to verify theestimates of the parameters 1205791 and 1205794 which change with thesame scaling proportionThe fact that OCV can be estimatedby 12057941205791 will be verified at last
0 10 20 30 40 50 60 70 80505
51
515
52
525
53
535
Time (s)
Term
inal
vol
tage
(V)
Fitting curveResponse curve
V1
V2
Figure 2 Terminal voltage response under step-current discharge
31 Parameter Extraction The extraction experiment thatcan obtain the parameters value is firstly carried out Theexperimental sample is a large size lithium iron phosphatebattery The nominal capacity and voltage of the selectedbattery is 50Ah and 512 V respectively The tests are carriedout on an AVL e-Storage Tester The tester is capable ofcharging and discharging the battery at a maximum rate of285A It can operate in several modes such as alternatingcurrent and constant current It comprises power currentvoltage and temperature measurements The battery testerand the data logger are connected to a PC through a bussystem The host computer with the installed software canprogram the experiment procedure Several limits for thebattery can be defined which are necessary in order to avoiddamage for example caused by overcharging
The pulsed-discharge experiments are carried out at dif-ferent SoC and the terminal voltage is monitored simultane-ously (see Figure 2) The battery parameters can be extractedthrough the transient response
The terminal voltage response at different SoC can befitted as in the following form
119906119905 (119905) = 1198812 + 1198881 (1 minus 119890minus1198882119905) (11)
where 1198881 and 1198882 are the least-squares curve fitting coefficients1198812 is as shown in Figure 2 Then the parameters value ofbattery model (see Figure 1) can be derived from
119877 =1198812 minus 1198811
119868 119877119901 =
1198881
119868
119862119901 =1
1198882119877119901
(12)
The parameter values identified for the battery module atdifferent SoC are given in Table 1 From Table 1 it can be seenthat the parameters 119877 119877119901 and 119862119901 are all varying with theSoC changes which further confirms that the system stateestimation needs adaptive scheme
4 Abstract and Applied Analysis
0 20 40 60 80 100 120 140 160minus20
minus15
minus10
minus5
0
5
10
15
20
Time (s)
Curr
ent (
A)
(a)
0 20 40 60 80 100 120 140 160532
534
536
538
54
542
544
546
548
55
Time (s)
ut
(V)
utEstimated value of utTrue value of
(b)
0 20 40 60 80 100 120 140 160minus01
minus005
0
005
01
015
Time (s)
Erro
r (V
)
(c)
Figure 3 Comparison of the true and estimated battery terminal voltage
Table 1 Model parameter values list identified for the battery module
SoC 01 02 03 04 05 06 07 08 09 10119877 (Ω) 005028 004882 004796 00471 004626 004564 004542 00448 004418 00438119877119901 (Ω) 0008786 0007328 000647 0005808 0005254 0005232 0004908 000481 0004142 0003978119862119901 (F) 960 1297 1569 19067 21506 22225 30593 2315 2847 2913119880oc (V) 51459 5218 52658 52758 52808 53078 53387 53394 53406 54108
32 Experiment Validation This subsection is to validatethe correctness of the theory of Section 22 The urbandynamometer driving schedule (UDDS) driving cycle ofAdvisor is adopted to generate terminal current (see Figure3(a)) According to the parameter values at SoC = 10 (seeTable 1) set the initial conditions of system (3) to be 119906119905(0) =54108 1205791 = 00863 1205792 = 000412 1205793 = 00438 and 1205794 = 467and set the initial conditions of observer system (4) to be
119905 = 51459 1205791(0) = 00833 1205792(0) = 00035 1205793(0) = 0043and 1205794(0) = 4 Set coefficients of update laws (6) to be 1198881 = 011198882 = 01 1198883 = 01 and 1198884 = 01 and set the observer gain tobe 119871 = 2 The experiment results are shown in Figures 3ndash5
Figure 3(a) is the system input namely battery terminalcurrent Figure 3(b) is the original and observer systemoutputs The observer error is shown in Figure 3(c) fromwhich we can see that the observer error converges to zero
Abstract and Applied Analysis 5
0 20 40 60 80 100 120 140 160004
005
006
007
008
00901
Time (s)
1205791
Estimated value of 1205791True value of 1205791
(a)
0 20 40 60 80 100 120 140 16025
3
35
4
45
5
Time (s)
Estimated value of 1205792
1205792
True value of 1205792
times10minus3
(b)
0 20 40 60 80 100 120 140 16000428
0043
00432
00434
00436
00438
0044
00442
00444
Time (s)
Estimated value of 1205793
1205793
True value of 1205793
(c)
0 20 40 60 80 100 120 140 16039
4
41
42
43
44
45
46
47
Time (s)
Estimated value of 1205794
1205794
True value of 1205794
(d)
0 20 40 60 80 100 120 140 160minus04
minus02
0
02
04
06
08
1
Time (s)
s1minuss4
(e)
Figure 4 Comparison of the true and estimated parameters value for the equivalent circuit model
within twelve seconds although the parameter values oforiginal system and observer system are different
Figures 4(a)ndash4(d) are the true and estimated values ofthe parameters 120579119894 (119894 = 1 4) from which we can see thatthe estimated values of the parameters are bounded Assumethat the scaling of the estimated values of 1205791 and 1205794 is 1199041 =12057911205791 and 1199044 = 12057941205794 accordingly Figure 4(e) shows that thedifference of 1199041 and 1199044 is approximately zero In other words
1199041 asymp 1199044 so the estimated value of 119906oc can be obtained from12057941205791
Figures 5(a) and 5(b) are the true and estimated batteryOCV and the estimated error It can be seen that the adaptiveobserver designed here can estimate the OCV accurately
Remark 4 Battery discharging at a constant current value15 A from SoC = 10 to SoC = 01 takes 10800 s (which does
6 Abstract and Applied Analysis
0 20 40 60 80 100 120 140 16040
50
60
70
80
90
100
Time (s)
uoc
(V)
Estimated value of uoc
True value of uoc
(a)
0 20 40 60 80 100 120 140 160minus40
minus30
minus20
minus10
0
10
20
Time (s)
Erro
r (V
)(b)
Figure 5 Comparison of the true and estimated battery open-circuit voltage
not include the standing time of the discharge experiment)119906oc changes from the maximum 54108V to the minimum51459V so 119906oc is considered to be a constant when discharg-ing and charging for tens of seconds
4 Conclusions
In this paper an adaptive observer is designed to estimateOCV of a lithium-ion battery pack The parameter values ofthe battery equivalent circuit model are extracted throughnonlinear fittingThe performance of the proposed estimatoris confirmed by a series of experiment results The validityresults show that the estimator has a good performance underthe condition that it has no requirement for knowing theexact parameter values
Acknowledgments
The authors are grateful to the editor and reviewers for theircomments and suggestions This work was supported bythe National Natural Science Foundation of China (Grantsnumbers 61034007 61273097 61104034 and 61104087) andResearch Fund for the Doctoral Programme of HigherEducation of China (Grant number 20120131130007)
References
[1] S TianMNHong andMGOuyang ldquoAn experimental studyand nonlinear modeling of discharge I-V behavior of valve-regulated lead-acid batteriesrdquo IEEE Transactions on EnergyConversion vol 24 no 2 pp 452ndash458 2009
[2] M Armand and J-M Tarascon ldquoBuilding better batteriesrdquoNature vol 451 no 7179 pp 652ndash657 2008
[3] V Ramadesigan P W C Northrop S De S SanthanagopalanR D Braatz and V R Subramanian ldquoModeling and simulation
of lithium-ion batteries from a systems engineering perspec-tiverdquo Journal of the Electrochemical Society vol 159 no 3 ppR31ndashR45 2012
[4] S Lee J Kim J Lee and B H Cho ldquoState-of-charge and capac-ity estimation of lithium-ion battery using a new open-circuitvoltage versus state-of-chargerdquo Journal of Power Sources vol185 no 1-2 pp 1367ndash1373 2008
[5] N A Windarko and J Choi ldquoSOC estimation based on OCVfor NiMH batteries using an improved Takacs modelrdquo Journalof Power Electronics vol 10 no 2 pp 181ndash186 2010
[6] S Abu-Sharkh and D Doerffel ldquoRapid test and non-linearmodel characterisation of solid-state lithium-ion batteriesrdquoJournal of Power Sources vol 130 no 1-2 pp 266ndash274 2004
[7] J H Kim and B H Cho ldquoState-of-charge estimation and state-of-health prediction of a Li-ion degraded battery based on anEKF combined with a per-unit systemrdquo IEEE Transactions onVehicular Technology vol 60 no 9 pp 4249ndash4260 2011
[8] B S Bhangu P Bentley D A Stone and C M BinghamldquoNonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehiclesrdquoIEEE Transactions on Vehicular Technology vol 54 no 3 pp783ndash794 2005
[9] F Zhang G J Liu L J Fang and H G Wang ldquoEstimationof battery state of charge with 119867infin observer applied to a robotfor inspecting power transmission linesrdquo IEEE Transactions onIndustrial Electronics vol 59 no 2 pp 1086ndash1095 2012
[10] G Luders and K S Narendra ldquoAn adaptive observer and iden-tifier for a linear systemrdquo IEEE Transactions on AutomaticControl vol 18 no 5 pp 496ndash499 1973
[11] J J E Slotine and W P Li Applied Nonlinear Control PrenticeHall New Jersey NJ USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Abstract and Applied Analysis
0 20 40 60 80 100 120 140 160minus20
minus15
minus10
minus5
0
5
10
15
20
Time (s)
Curr
ent (
A)
(a)
0 20 40 60 80 100 120 140 160532
534
536
538
54
542
544
546
548
55
Time (s)
ut
(V)
utEstimated value of utTrue value of
(b)
0 20 40 60 80 100 120 140 160minus01
minus005
0
005
01
015
Time (s)
Erro
r (V
)
(c)
Figure 3 Comparison of the true and estimated battery terminal voltage
Table 1 Model parameter values list identified for the battery module
SoC 01 02 03 04 05 06 07 08 09 10119877 (Ω) 005028 004882 004796 00471 004626 004564 004542 00448 004418 00438119877119901 (Ω) 0008786 0007328 000647 0005808 0005254 0005232 0004908 000481 0004142 0003978119862119901 (F) 960 1297 1569 19067 21506 22225 30593 2315 2847 2913119880oc (V) 51459 5218 52658 52758 52808 53078 53387 53394 53406 54108
32 Experiment Validation This subsection is to validatethe correctness of the theory of Section 22 The urbandynamometer driving schedule (UDDS) driving cycle ofAdvisor is adopted to generate terminal current (see Figure3(a)) According to the parameter values at SoC = 10 (seeTable 1) set the initial conditions of system (3) to be 119906119905(0) =54108 1205791 = 00863 1205792 = 000412 1205793 = 00438 and 1205794 = 467and set the initial conditions of observer system (4) to be
119905 = 51459 1205791(0) = 00833 1205792(0) = 00035 1205793(0) = 0043and 1205794(0) = 4 Set coefficients of update laws (6) to be 1198881 = 011198882 = 01 1198883 = 01 and 1198884 = 01 and set the observer gain tobe 119871 = 2 The experiment results are shown in Figures 3ndash5
Figure 3(a) is the system input namely battery terminalcurrent Figure 3(b) is the original and observer systemoutputs The observer error is shown in Figure 3(c) fromwhich we can see that the observer error converges to zero
Abstract and Applied Analysis 5
0 20 40 60 80 100 120 140 160004
005
006
007
008
00901
Time (s)
1205791
Estimated value of 1205791True value of 1205791
(a)
0 20 40 60 80 100 120 140 16025
3
35
4
45
5
Time (s)
Estimated value of 1205792
1205792
True value of 1205792
times10minus3
(b)
0 20 40 60 80 100 120 140 16000428
0043
00432
00434
00436
00438
0044
00442
00444
Time (s)
Estimated value of 1205793
1205793
True value of 1205793
(c)
0 20 40 60 80 100 120 140 16039
4
41
42
43
44
45
46
47
Time (s)
Estimated value of 1205794
1205794
True value of 1205794
(d)
0 20 40 60 80 100 120 140 160minus04
minus02
0
02
04
06
08
1
Time (s)
s1minuss4
(e)
Figure 4 Comparison of the true and estimated parameters value for the equivalent circuit model
within twelve seconds although the parameter values oforiginal system and observer system are different
Figures 4(a)ndash4(d) are the true and estimated values ofthe parameters 120579119894 (119894 = 1 4) from which we can see thatthe estimated values of the parameters are bounded Assumethat the scaling of the estimated values of 1205791 and 1205794 is 1199041 =12057911205791 and 1199044 = 12057941205794 accordingly Figure 4(e) shows that thedifference of 1199041 and 1199044 is approximately zero In other words
1199041 asymp 1199044 so the estimated value of 119906oc can be obtained from12057941205791
Figures 5(a) and 5(b) are the true and estimated batteryOCV and the estimated error It can be seen that the adaptiveobserver designed here can estimate the OCV accurately
Remark 4 Battery discharging at a constant current value15 A from SoC = 10 to SoC = 01 takes 10800 s (which does
6 Abstract and Applied Analysis
0 20 40 60 80 100 120 140 16040
50
60
70
80
90
100
Time (s)
uoc
(V)
Estimated value of uoc
True value of uoc
(a)
0 20 40 60 80 100 120 140 160minus40
minus30
minus20
minus10
0
10
20
Time (s)
Erro
r (V
)(b)
Figure 5 Comparison of the true and estimated battery open-circuit voltage
not include the standing time of the discharge experiment)119906oc changes from the maximum 54108V to the minimum51459V so 119906oc is considered to be a constant when discharg-ing and charging for tens of seconds
4 Conclusions
In this paper an adaptive observer is designed to estimateOCV of a lithium-ion battery pack The parameter values ofthe battery equivalent circuit model are extracted throughnonlinear fittingThe performance of the proposed estimatoris confirmed by a series of experiment results The validityresults show that the estimator has a good performance underthe condition that it has no requirement for knowing theexact parameter values
Acknowledgments
The authors are grateful to the editor and reviewers for theircomments and suggestions This work was supported bythe National Natural Science Foundation of China (Grantsnumbers 61034007 61273097 61104034 and 61104087) andResearch Fund for the Doctoral Programme of HigherEducation of China (Grant number 20120131130007)
References
[1] S TianMNHong andMGOuyang ldquoAn experimental studyand nonlinear modeling of discharge I-V behavior of valve-regulated lead-acid batteriesrdquo IEEE Transactions on EnergyConversion vol 24 no 2 pp 452ndash458 2009
[2] M Armand and J-M Tarascon ldquoBuilding better batteriesrdquoNature vol 451 no 7179 pp 652ndash657 2008
[3] V Ramadesigan P W C Northrop S De S SanthanagopalanR D Braatz and V R Subramanian ldquoModeling and simulation
of lithium-ion batteries from a systems engineering perspec-tiverdquo Journal of the Electrochemical Society vol 159 no 3 ppR31ndashR45 2012
[4] S Lee J Kim J Lee and B H Cho ldquoState-of-charge and capac-ity estimation of lithium-ion battery using a new open-circuitvoltage versus state-of-chargerdquo Journal of Power Sources vol185 no 1-2 pp 1367ndash1373 2008
[5] N A Windarko and J Choi ldquoSOC estimation based on OCVfor NiMH batteries using an improved Takacs modelrdquo Journalof Power Electronics vol 10 no 2 pp 181ndash186 2010
[6] S Abu-Sharkh and D Doerffel ldquoRapid test and non-linearmodel characterisation of solid-state lithium-ion batteriesrdquoJournal of Power Sources vol 130 no 1-2 pp 266ndash274 2004
[7] J H Kim and B H Cho ldquoState-of-charge estimation and state-of-health prediction of a Li-ion degraded battery based on anEKF combined with a per-unit systemrdquo IEEE Transactions onVehicular Technology vol 60 no 9 pp 4249ndash4260 2011
[8] B S Bhangu P Bentley D A Stone and C M BinghamldquoNonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehiclesrdquoIEEE Transactions on Vehicular Technology vol 54 no 3 pp783ndash794 2005
[9] F Zhang G J Liu L J Fang and H G Wang ldquoEstimationof battery state of charge with 119867infin observer applied to a robotfor inspecting power transmission linesrdquo IEEE Transactions onIndustrial Electronics vol 59 no 2 pp 1086ndash1095 2012
[10] G Luders and K S Narendra ldquoAn adaptive observer and iden-tifier for a linear systemrdquo IEEE Transactions on AutomaticControl vol 18 no 5 pp 496ndash499 1973
[11] J J E Slotine and W P Li Applied Nonlinear Control PrenticeHall New Jersey NJ USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Abstract and Applied Analysis 5
0 20 40 60 80 100 120 140 160004
005
006
007
008
00901
Time (s)
1205791
Estimated value of 1205791True value of 1205791
(a)
0 20 40 60 80 100 120 140 16025
3
35
4
45
5
Time (s)
Estimated value of 1205792
1205792
True value of 1205792
times10minus3
(b)
0 20 40 60 80 100 120 140 16000428
0043
00432
00434
00436
00438
0044
00442
00444
Time (s)
Estimated value of 1205793
1205793
True value of 1205793
(c)
0 20 40 60 80 100 120 140 16039
4
41
42
43
44
45
46
47
Time (s)
Estimated value of 1205794
1205794
True value of 1205794
(d)
0 20 40 60 80 100 120 140 160minus04
minus02
0
02
04
06
08
1
Time (s)
s1minuss4
(e)
Figure 4 Comparison of the true and estimated parameters value for the equivalent circuit model
within twelve seconds although the parameter values oforiginal system and observer system are different
Figures 4(a)ndash4(d) are the true and estimated values ofthe parameters 120579119894 (119894 = 1 4) from which we can see thatthe estimated values of the parameters are bounded Assumethat the scaling of the estimated values of 1205791 and 1205794 is 1199041 =12057911205791 and 1199044 = 12057941205794 accordingly Figure 4(e) shows that thedifference of 1199041 and 1199044 is approximately zero In other words
1199041 asymp 1199044 so the estimated value of 119906oc can be obtained from12057941205791
Figures 5(a) and 5(b) are the true and estimated batteryOCV and the estimated error It can be seen that the adaptiveobserver designed here can estimate the OCV accurately
Remark 4 Battery discharging at a constant current value15 A from SoC = 10 to SoC = 01 takes 10800 s (which does
6 Abstract and Applied Analysis
0 20 40 60 80 100 120 140 16040
50
60
70
80
90
100
Time (s)
uoc
(V)
Estimated value of uoc
True value of uoc
(a)
0 20 40 60 80 100 120 140 160minus40
minus30
minus20
minus10
0
10
20
Time (s)
Erro
r (V
)(b)
Figure 5 Comparison of the true and estimated battery open-circuit voltage
not include the standing time of the discharge experiment)119906oc changes from the maximum 54108V to the minimum51459V so 119906oc is considered to be a constant when discharg-ing and charging for tens of seconds
4 Conclusions
In this paper an adaptive observer is designed to estimateOCV of a lithium-ion battery pack The parameter values ofthe battery equivalent circuit model are extracted throughnonlinear fittingThe performance of the proposed estimatoris confirmed by a series of experiment results The validityresults show that the estimator has a good performance underthe condition that it has no requirement for knowing theexact parameter values
Acknowledgments
The authors are grateful to the editor and reviewers for theircomments and suggestions This work was supported bythe National Natural Science Foundation of China (Grantsnumbers 61034007 61273097 61104034 and 61104087) andResearch Fund for the Doctoral Programme of HigherEducation of China (Grant number 20120131130007)
References
[1] S TianMNHong andMGOuyang ldquoAn experimental studyand nonlinear modeling of discharge I-V behavior of valve-regulated lead-acid batteriesrdquo IEEE Transactions on EnergyConversion vol 24 no 2 pp 452ndash458 2009
[2] M Armand and J-M Tarascon ldquoBuilding better batteriesrdquoNature vol 451 no 7179 pp 652ndash657 2008
[3] V Ramadesigan P W C Northrop S De S SanthanagopalanR D Braatz and V R Subramanian ldquoModeling and simulation
of lithium-ion batteries from a systems engineering perspec-tiverdquo Journal of the Electrochemical Society vol 159 no 3 ppR31ndashR45 2012
[4] S Lee J Kim J Lee and B H Cho ldquoState-of-charge and capac-ity estimation of lithium-ion battery using a new open-circuitvoltage versus state-of-chargerdquo Journal of Power Sources vol185 no 1-2 pp 1367ndash1373 2008
[5] N A Windarko and J Choi ldquoSOC estimation based on OCVfor NiMH batteries using an improved Takacs modelrdquo Journalof Power Electronics vol 10 no 2 pp 181ndash186 2010
[6] S Abu-Sharkh and D Doerffel ldquoRapid test and non-linearmodel characterisation of solid-state lithium-ion batteriesrdquoJournal of Power Sources vol 130 no 1-2 pp 266ndash274 2004
[7] J H Kim and B H Cho ldquoState-of-charge estimation and state-of-health prediction of a Li-ion degraded battery based on anEKF combined with a per-unit systemrdquo IEEE Transactions onVehicular Technology vol 60 no 9 pp 4249ndash4260 2011
[8] B S Bhangu P Bentley D A Stone and C M BinghamldquoNonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehiclesrdquoIEEE Transactions on Vehicular Technology vol 54 no 3 pp783ndash794 2005
[9] F Zhang G J Liu L J Fang and H G Wang ldquoEstimationof battery state of charge with 119867infin observer applied to a robotfor inspecting power transmission linesrdquo IEEE Transactions onIndustrial Electronics vol 59 no 2 pp 1086ndash1095 2012
[10] G Luders and K S Narendra ldquoAn adaptive observer and iden-tifier for a linear systemrdquo IEEE Transactions on AutomaticControl vol 18 no 5 pp 496ndash499 1973
[11] J J E Slotine and W P Li Applied Nonlinear Control PrenticeHall New Jersey NJ USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
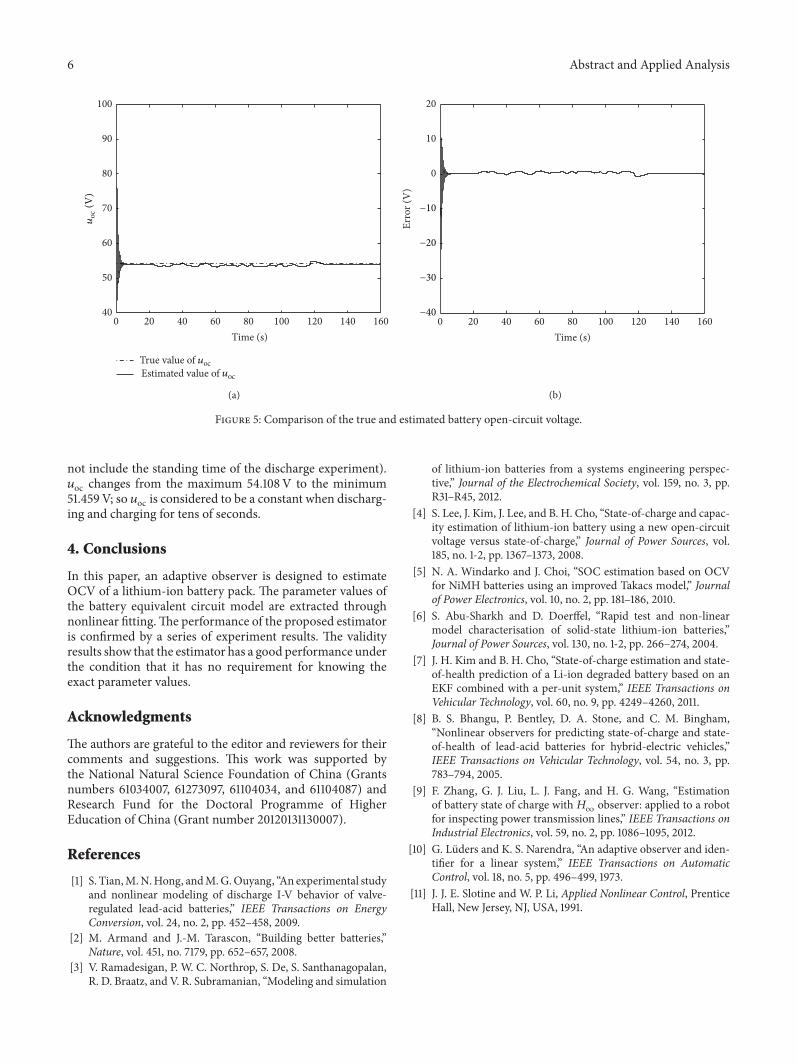
6 Abstract and Applied Analysis
0 20 40 60 80 100 120 140 16040
50
60
70
80
90
100
Time (s)
uoc
(V)
Estimated value of uoc
True value of uoc
(a)
0 20 40 60 80 100 120 140 160minus40
minus30
minus20
minus10
0
10
20
Time (s)
Erro
r (V
)(b)
Figure 5 Comparison of the true and estimated battery open-circuit voltage
not include the standing time of the discharge experiment)119906oc changes from the maximum 54108V to the minimum51459V so 119906oc is considered to be a constant when discharg-ing and charging for tens of seconds
4 Conclusions
In this paper an adaptive observer is designed to estimateOCV of a lithium-ion battery pack The parameter values ofthe battery equivalent circuit model are extracted throughnonlinear fittingThe performance of the proposed estimatoris confirmed by a series of experiment results The validityresults show that the estimator has a good performance underthe condition that it has no requirement for knowing theexact parameter values
Acknowledgments
The authors are grateful to the editor and reviewers for theircomments and suggestions This work was supported bythe National Natural Science Foundation of China (Grantsnumbers 61034007 61273097 61104034 and 61104087) andResearch Fund for the Doctoral Programme of HigherEducation of China (Grant number 20120131130007)
References
[1] S TianMNHong andMGOuyang ldquoAn experimental studyand nonlinear modeling of discharge I-V behavior of valve-regulated lead-acid batteriesrdquo IEEE Transactions on EnergyConversion vol 24 no 2 pp 452ndash458 2009
[2] M Armand and J-M Tarascon ldquoBuilding better batteriesrdquoNature vol 451 no 7179 pp 652ndash657 2008
[3] V Ramadesigan P W C Northrop S De S SanthanagopalanR D Braatz and V R Subramanian ldquoModeling and simulation
of lithium-ion batteries from a systems engineering perspec-tiverdquo Journal of the Electrochemical Society vol 159 no 3 ppR31ndashR45 2012
[4] S Lee J Kim J Lee and B H Cho ldquoState-of-charge and capac-ity estimation of lithium-ion battery using a new open-circuitvoltage versus state-of-chargerdquo Journal of Power Sources vol185 no 1-2 pp 1367ndash1373 2008
[5] N A Windarko and J Choi ldquoSOC estimation based on OCVfor NiMH batteries using an improved Takacs modelrdquo Journalof Power Electronics vol 10 no 2 pp 181ndash186 2010
[6] S Abu-Sharkh and D Doerffel ldquoRapid test and non-linearmodel characterisation of solid-state lithium-ion batteriesrdquoJournal of Power Sources vol 130 no 1-2 pp 266ndash274 2004
[7] J H Kim and B H Cho ldquoState-of-charge estimation and state-of-health prediction of a Li-ion degraded battery based on anEKF combined with a per-unit systemrdquo IEEE Transactions onVehicular Technology vol 60 no 9 pp 4249ndash4260 2011
[8] B S Bhangu P Bentley D A Stone and C M BinghamldquoNonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehiclesrdquoIEEE Transactions on Vehicular Technology vol 54 no 3 pp783ndash794 2005
[9] F Zhang G J Liu L J Fang and H G Wang ldquoEstimationof battery state of charge with 119867infin observer applied to a robotfor inspecting power transmission linesrdquo IEEE Transactions onIndustrial Electronics vol 59 no 2 pp 1086ndash1095 2012
[10] G Luders and K S Narendra ldquoAn adaptive observer and iden-tifier for a linear systemrdquo IEEE Transactions on AutomaticControl vol 18 no 5 pp 496ndash499 1973
[11] J J E Slotine and W P Li Applied Nonlinear Control PrenticeHall New Jersey NJ USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of











![Run-Time Adaptive Workload Estimation for Dynamic Voltage Scalingdtl.yonsei.ac.kr/docs/International_Journal/[2009][IEEE... · · 2014-03-10Run-Time Adaptive Workload Estimation](https://static.fdocuments.us/doc/165x107/5af4bf8e7f8b9a190c8d70ac/run-time-adaptive-workload-estimation-for-dynamic-voltage-2009ieee2014-03-10run-time.jpg)






