Reliability analysis - LTH · Reliability as a concept General definition The ability to meet...
54
Reliability analysis OSKAR LARSSON
-
Upload
nguyendiep -
Category
Documents
-
view
224 -
download
0
Transcript of Reliability analysis - LTH · Reliability as a concept General definition The ability to meet...
Reliability analysisOSKAR LARSSON
Reliability as a concept
General definition
The ability to meet specific requirements under a specified period
Mathematical definition in structural reliability
The probability that a system does not reach a defined limit state under a given reference period.
2

Background
• During the second world war it became evident that the reliability of complex technical installations was a problem
• As an example the modern warships at the time were only operational for attack/defence in about 60 % of the time
• Similar effects were observed on the reliability of e.g. the V1l V2 rocket systems -the first of many launches were unsuccessful
• These events were the real initiators of the reliability theory for technical components and systems
3
Background
• lnitially the reliability theory was developed for systems with a large number of {semi-} identical components subject to the same exposure conditions
– electrical systems {bulbs, switches, .. }
• and later on to– nuclear power installations {valves, pipes, pumps, .. }– chemical plants (pipes, pressure vessels, valves,
pumps, .. }– manufacturing plants (pumps, compressors,
conveyers, .. }4
Background
• For such systems the probability of a component failure may be assessed in a frequentistic manner – from observed failure rates – number of failures per component operation hours
• Due to the characteristics of the failure mechanism there is a steady deterioration as a function of time/use
• For the considered components the main concern was centered around the statistical modeling of time until failure
5

Background
• For technical systems such as structures and structural components the classical reliability analysis is of limited use because
– all structural components are unique– the failure mechanism tends to be related to extreme
load events exceeding the residual capacity of the component- not the direct effect of deterioration alone
• For such systems a different approach is thus required, namely
– an individual modeling of both the resistance as a function of time and the loading as a function of time
6

Connection to previous lectures
• Basic statistics:– Distributions, (mean, std. deviation, parameters)– Probability of failure– Standard normal distribution
• Introduction– Codes and standards, partial coefficients– Limit states– Modeling of uncertainties
7
Methods to measure reliability
• Level I methodUncertain parameters are modelled by one characteristicvalue, e.g. code based on partial coefficent method
• Level II methodUncertain parameters modelled by the mean values and the standard deviations and by the correlation coefficietnsbetween stochastic vairables. The stochastic variables areimplicitly assumed to be normally distributed. The reliabilityindex method is an example of a level II method
8
Methods to measure reliability
• Level III methodUncertain quantities are modelled by their joint distribution functions. The probability of failure is estimated as a measure of the reliability
• Level IV methodConsequences (cost) of failure are also taken into account
9

Deterministic reliability measures(Level I)
• Single safety factor
• Partial safety factors
10

Safety factor
• Safety factor is a traditional measure on reliability
Design condition: G+Q<R/s
where s is safety factor > 1
• G,Q and R are ”nominal” values not necessarily definedin statistical terms
• Differences in uncertainty between basic parameters arenot considered, e.g. G och Q.
11

Partial safety factor format
Index k denotes characteristic value
Characteristic values are defined in statistical terms
i denote partial safety factors reflecting different degree of uncertainty for basic parameters
dQkGkR
kd SQG
RR )(
12
Implicit and generic risk analysis behind modern structural codes
• Consequences and risk acceptance in the society are implicitly considered in modern structural codes
• The results are presented in terms of required levels of formal reliability in different situations
• This means that the decision problem when designing a structure is transformed to a verification that the probability of violation of the limit state is lower that a prescribed level.
• Modern structural codes are often called limit state design codes
13
Probabilistic reliability measures
14

Structural reliability
Reliability of structures cannot be assessed through failure rates because:
- Structures are unique in nature
- Structural failures normally take place due to extreme loads exceeding the residualstrength
Therefore in structural reliability, models are established for resistances R and loads S individually and the structural reliability is assessed through the probability of failure
15

Probability of failure, reliability
Probability of failure pf = P(R-S<0)
Reliability = 1- pf
Design of a new structure
Design the structure so that pf is less than target value
Verification of existing structure
Check if pf is less than target value
16

Main steps in reliability analysis
1. Select a target reliability level (safety or consequence class)
2. Identify significant failure modes (deflection, bending)3. Formulate limit state functions (g(E,R) = MEd – MRd = 0)4. Identify stochastic variables and deterministic
parameters. Specify distribution types and statistical parameters
5. Estimate reliability of each failure mode6. Change design if reliabiliy does not meat target reliabilty7. Evaluate reliability result by a sensitivity analysis
17

Structural Engineering Decision Problem:
Optimal Design:
01 F D DD
F F DE B I P C C CE BC
P C
Benefit of the Structure in Service
Expected Benefit of the Structure
Reliability Risk
Benefit
Risk
Cost
But what is a proper target reliability???
18

Theory of StructuralReliability
19

FailureIn general defined as: capacity < demand
resistance < load effect
e.g. a beam in bending:
4mG lf W r s
BUT - resistance and load effect are uncertain !!!First assume that r and s are Normal distributed random variables with known mean values and standard deviations.
20

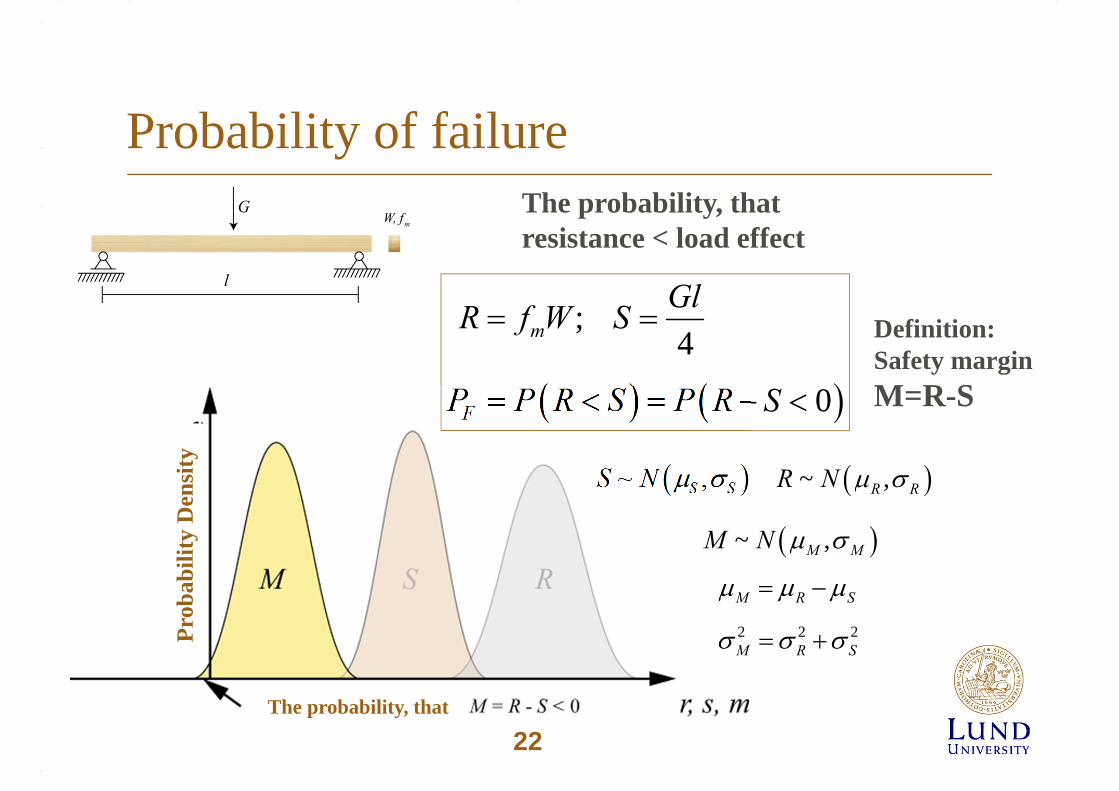
Probability of failure
~ ,S SS N ~ ,R RR N
; 4
0
m
F
GlR f W S
P P R S P R S
The probability, that resistance < load effect
21
Probability of failure
~ ,S SS N ~ ,R RR N
; 4
0
m
F
GlR f W S
P P R S P R S
The probability, that resistance < load effect
Prob
abili
ty D
ensi
ty
~ ,M MM N
2 2 2
M R S
M R S
The probability, that
Definition:Safety margin M=R-S
22

Probability of failure
; 4
0 0
m
F
GlR f W S
P P R S P R S P M
0 0 M
F MM
P f m dm
The probability, that resistance < load effect
Prob
abili
ty D
ensi
ty
The probability, that23

0 0 M
F MM
P f m dm
Probability of failure
; 4
0 0
m
F
GlR f W S
P P R S P R S P M
The probability, that resistance < load effect
Prob
abili
ty D
ensi
ty
The probability, that
Mf m
Reliability Index
24

Reliability Index (Safety index)
Prob
abili
ty D
ensi
ty
MF
M
P
Geometrical interpretation:
25

Reliability IndexPr
obab
ility
Den
sity
M
FM
P
Geometrical interpretation:
0 0.51 0.1586552 0.022753 0.001354 3.17E‐055 2.87E‐076 9.87E‐107 1.28E‐128 6.22E‐16
FP
26

Safety class
• The reliability index (probability of failure) is governing the safety class used in the partial safety factor method
Safety class
Reliability index
Probability of failure
Part. Safety factor
1 Less serious
3,7 10-4 0,83
2 Serious 4,3 10-5 0,913 Very serious
4,7 10-6 1,0
27
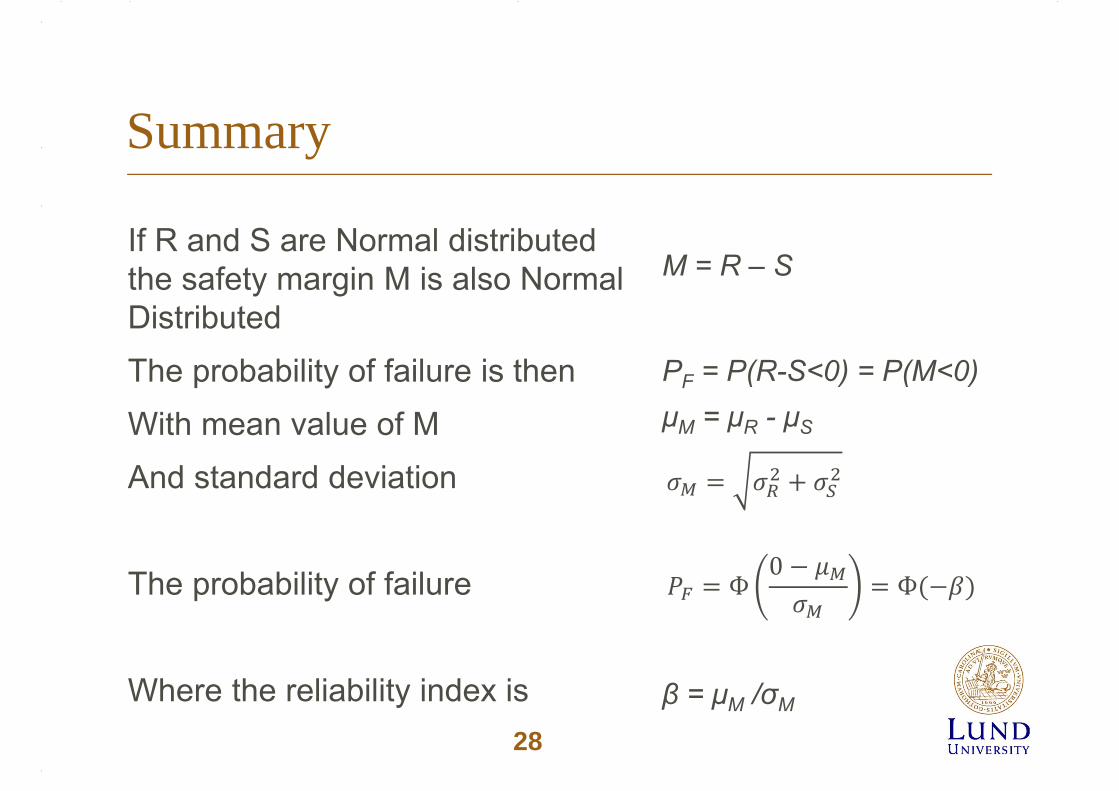
Summary
If R and S are Normal distributed the safety margin M is also Normal DistributedThe probability of failure is thenWith mean value of MAnd standard deviation
The probability of failure
Where the reliability index is
M = R – S
PF = P(R-S<0) = P(M<0)μM = μR - μS
β = μM /σM
Ф0
Ф
28
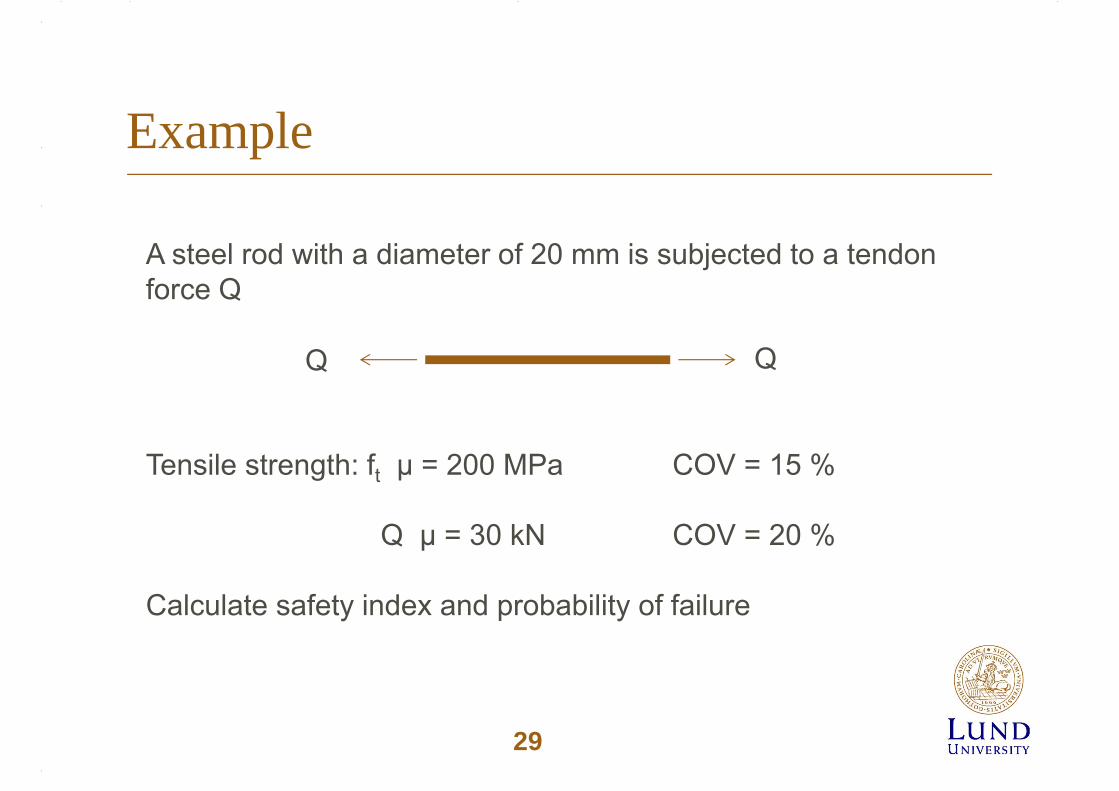
Example
A steel rod with a diameter of 20 mm is subjected to a tendon force Q
Tensile strength: ft μ = 200 MPa COV = 15 %
Q μ = 30 kN COV = 20 %
Calculate safety index and probability of failure
29

Reliability Analysis, the general case
Limit state function general case
In the general case the resistance and the load may be defined in terms of functions where X are basic random variables
R = f1(X), S = f2(X)
M= R-S = f1(X)-f2(X) = g(X)
The limit state function should be defined so that
M= g(X) > 0 corresponds to the safe state
M= g(X) < 0 corresponds to the failure state
30
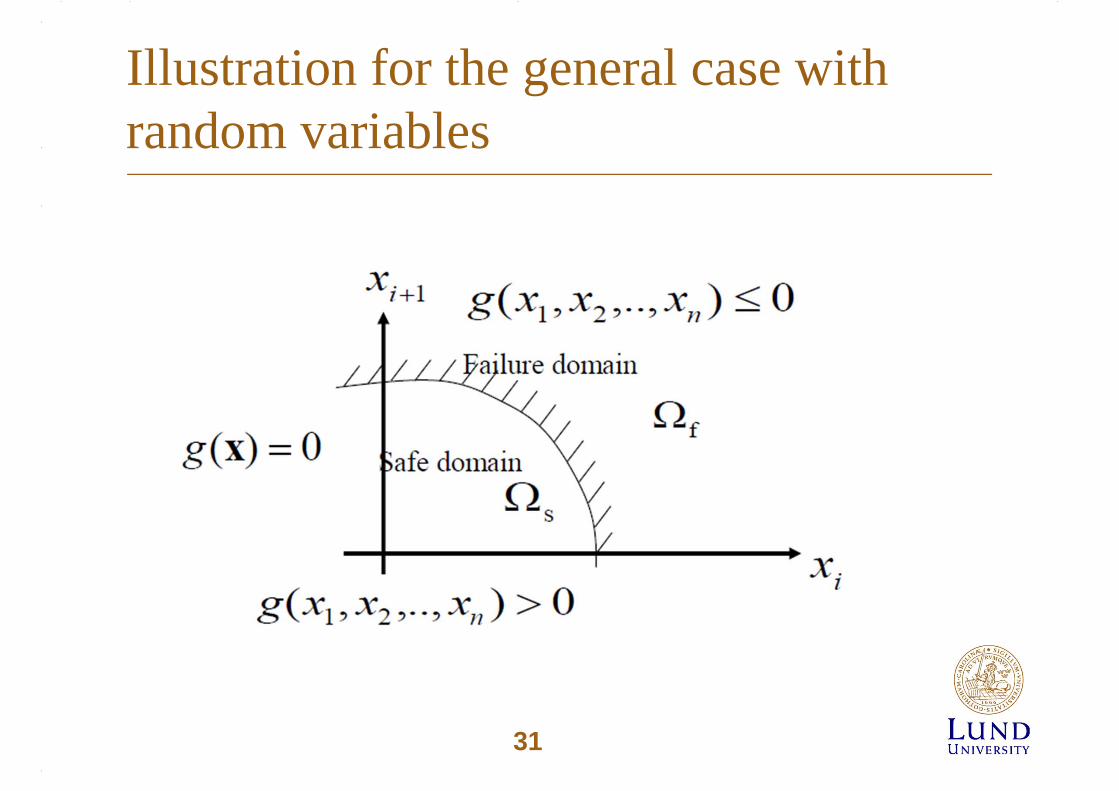
Illustration for the general case with random variables
31

Probability of failure Pf
Pf =P(M0) = P(g(X)0)
Introduce the joint probability density function fX(X)
Then
f
dXXfP Xf
)(
where f is the failure region defined by the limit state function
X = (x1,.....xn )
32
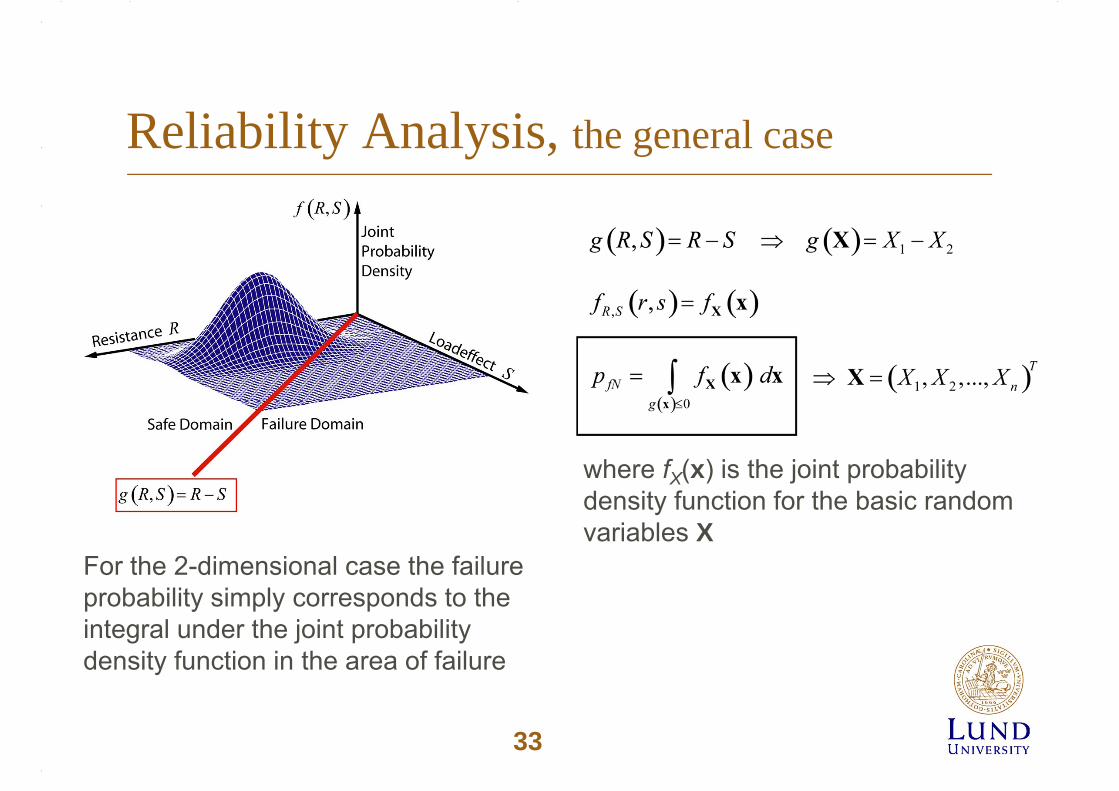
Reliability Analysis, the general case
where fX(x) is the joint probabilitydensity function for the basic random variables X
For the 2-dimensional case the failure probability simply corresponds to the integral under the joint probability density function in the area of failure
33

Analysis methods in reliability analysis
• Analytical methods (only in very special cases)
• First Order Reliability Methods (FORM)
• Second Order Reliability Methods (SORM)
• Simulation techniques
34
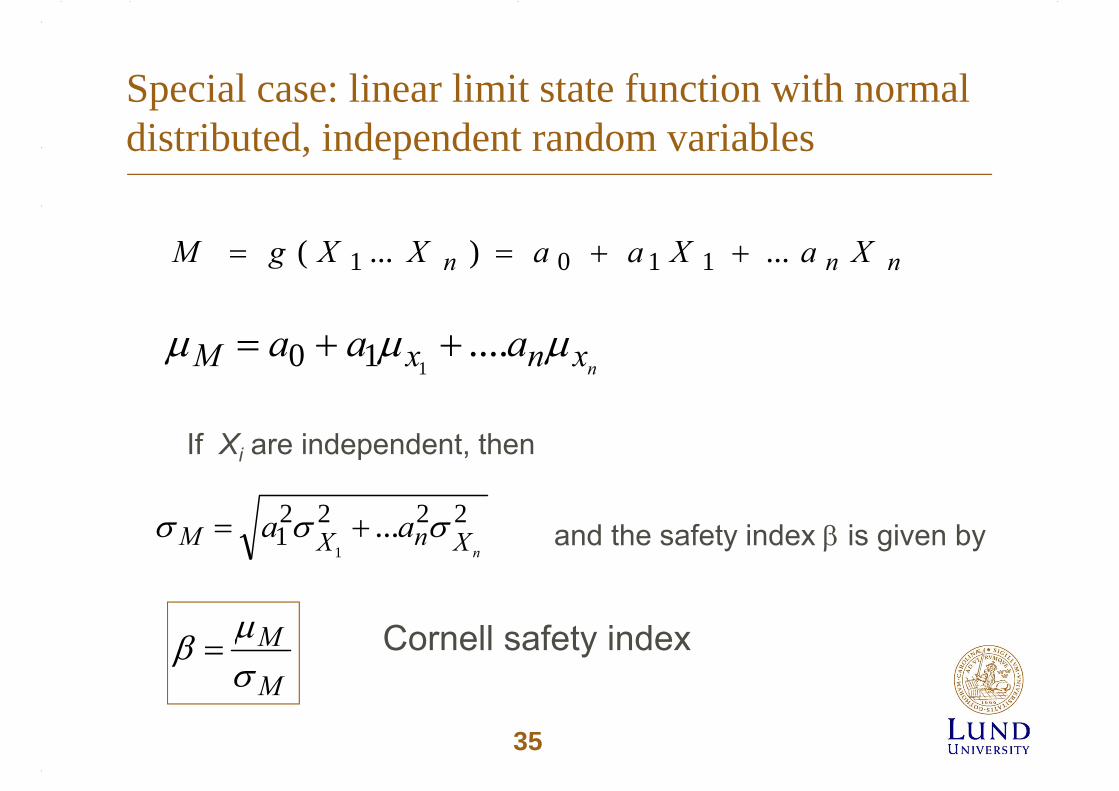
Special case: linear limit state function with normal distributed, independent random variables
nnn XaXaaXXgM ...)...( 1101
nxnxM aaa ....110
If Xi are independent, then
22221 ...
1 nXnXM aa and the safety index is given by
M
M Cornell safety index
35
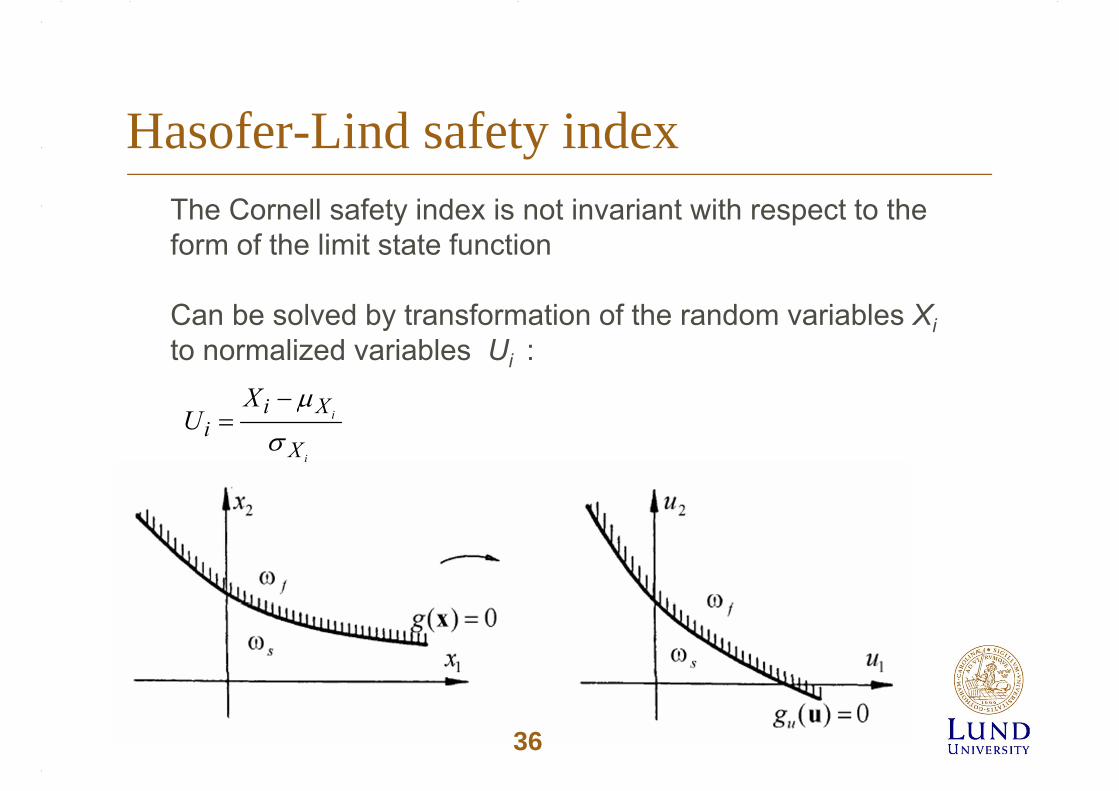
Hasofer-Lind safety indexThe Cornell safety index is not invariant with respect to the form of the limit state function
Can be solved by transformation of the random variables Xito normalized variables Ui :
i
i
X
Xii
XU
36
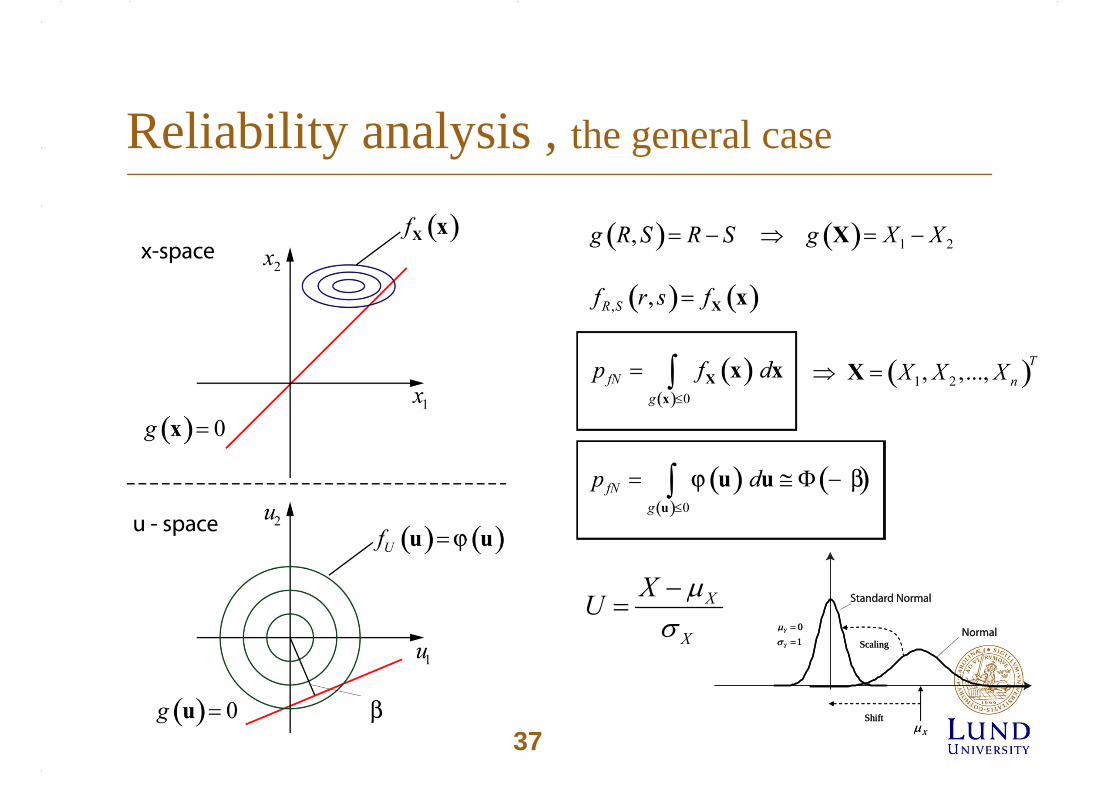
Reliability analysis , the general case
X
X
XU
Standard Normal
Normal
XShift
Scaling
01
Y
Y
Standard Normal
Normal
XShift
Scaling
01
Y
Y
37

Non-linear failure function
The failure function can be linearized by Taylor expansion:
)()( *
1
*
*
uUUgugM i
uu
n
i
where u* is the design point
This is the first order approximation (FORM)If one more term is included in the expansion we have a “second order” approximation (SORM)
Note that u* is not known at the outset, and has to be found by iteration
38

Geometrical interpretation
The safety index is the shortest distance from the failure surface to the origin in the normalised space U
The point u* on the failure surface is called the design point
The components of the unit vector of the normal to the failure surface in the point u* describes the relative importance (or sensitivities) of the random variables.
39
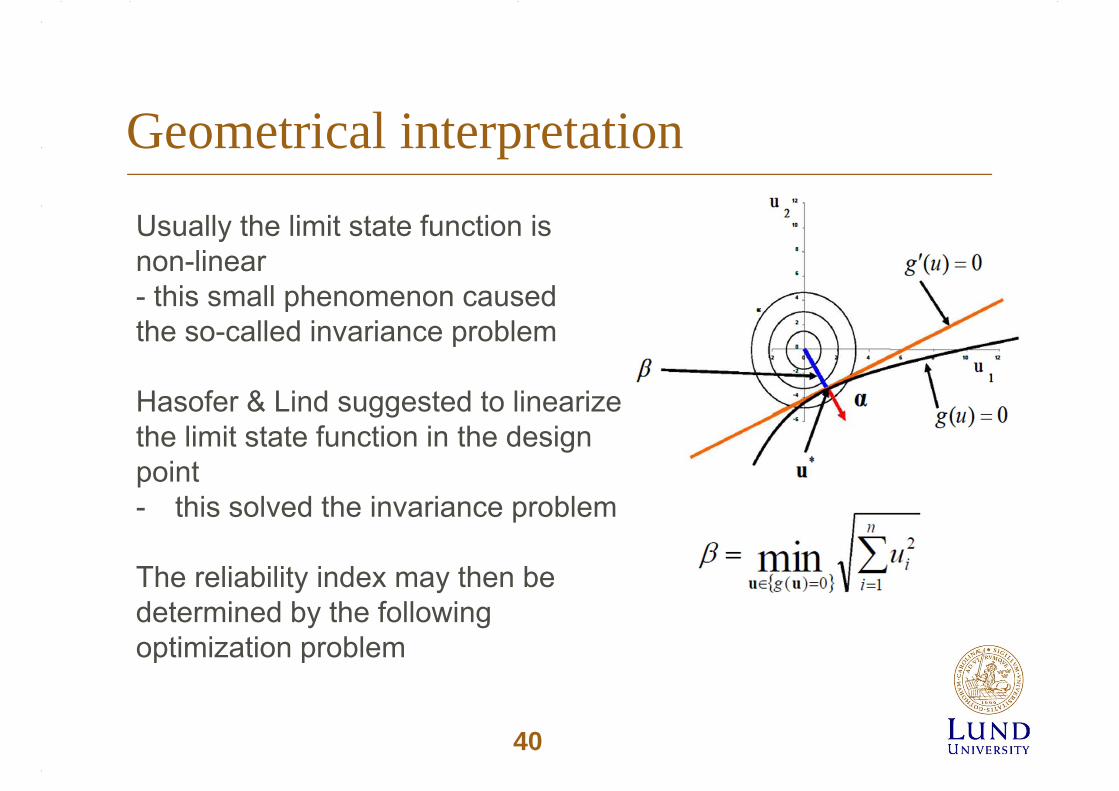
Geometrical interpretation
Usually the limit state function isnon-linear- this small phenomenon causedthe so-called invariance problem
Hasofer & Lind suggested to linearizethe limit state function in the designpoint- this solved the invariance problem
The reliability index may then bedetermined by the followingoptimization problem
40

Iteration processThe optimization problem can be formulatedas an iteration problem
1) the design point is determined as
2) the normal vector to the limit statefunction is determined as
3) the safety index is determined as
4) a new design point is determined as
5) the above steps are continued untilconvergence in is attained
u = β · α
41

Iteration process
• There are two alternative procedures for solving the iteration problem:
- The simultaneous equation procedure (shown in the next example)
- The matrix procedure
42
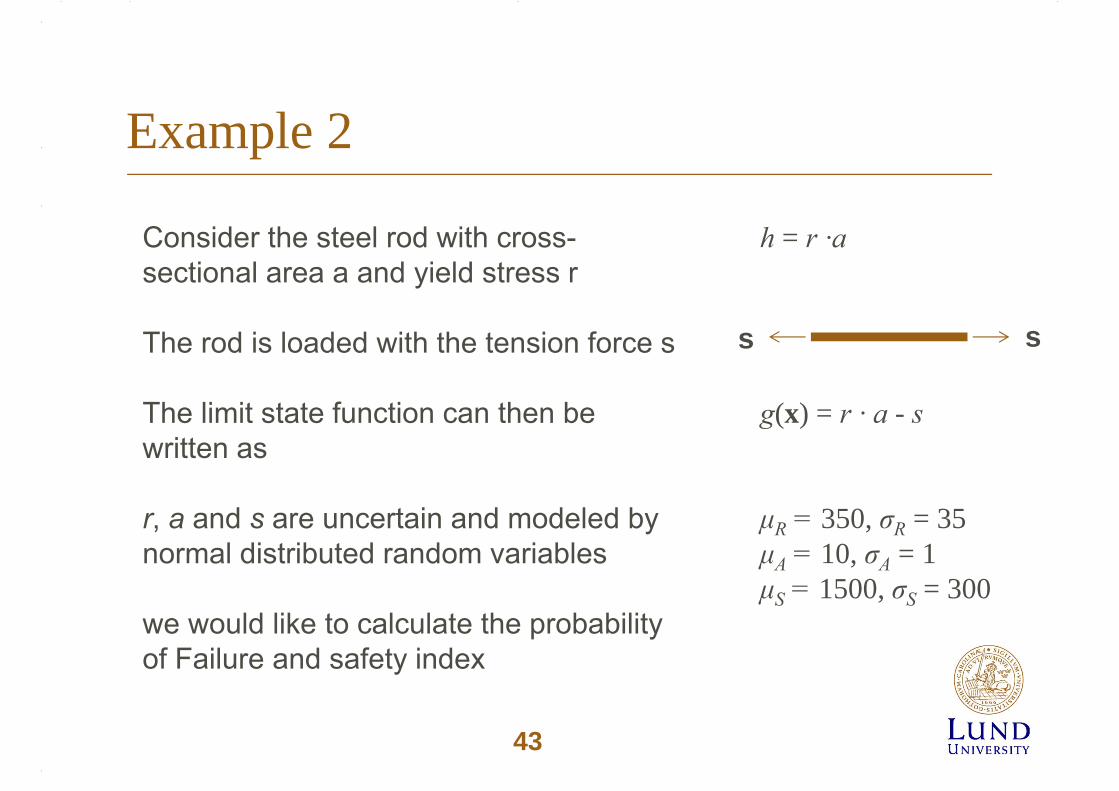
Example 2
Consider the steel rod with cross-sectional area a and yield stress r
The rod is loaded with the tension force s
The limit state function can then be written as
r, a and s are uncertain and modeled bynormal distributed random variables
we would like to calculate the probability of Failure and safety index
h = r ·a
g(x) = r · a - s
μR = 350, σR = 35 μA = 10, σA = 1 μS = 1500, σS = 300
ss
43
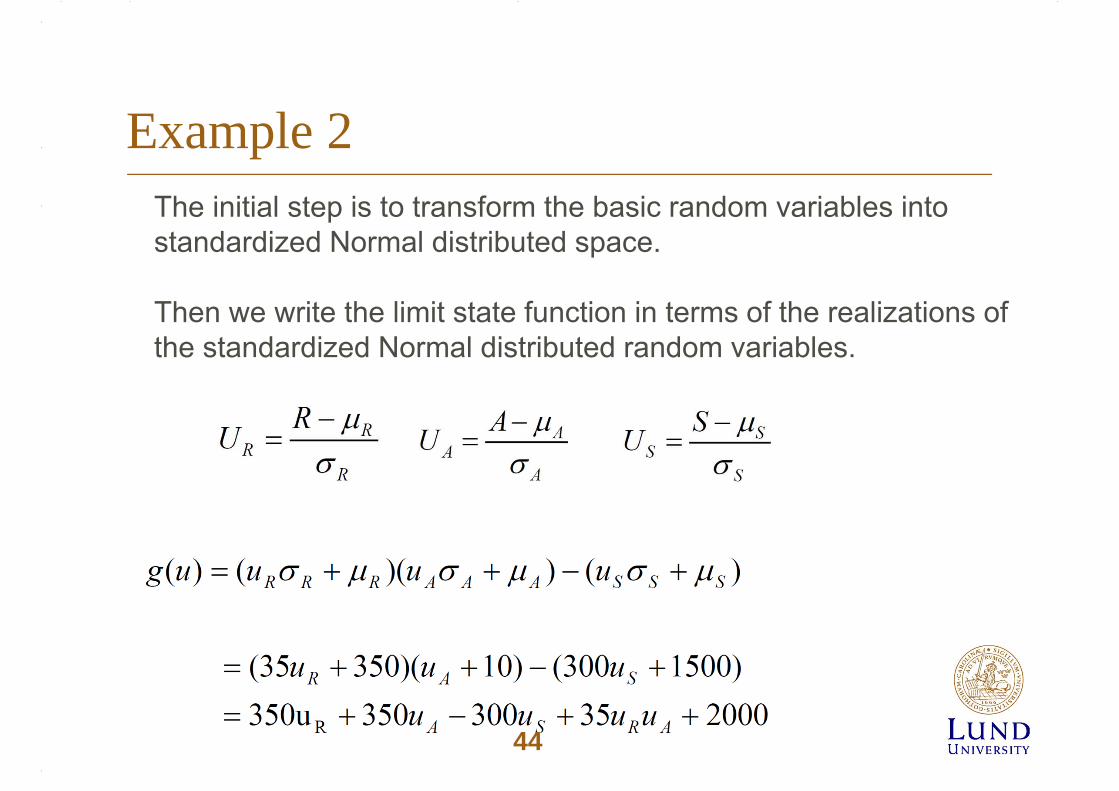
Example 2The initial step is to transform the basic random variables into standardized Normal distributed space.
Then we write the limit state function in terms of the realizations of the standardized Normal distributed random variables.
44

Example 2Choose an arbitrary first design point u = βα
Limit state function
g(u) = 350βαR + 350βαA - 300βαS + 35 βαR βαA + 2000
The safety index is determined by
g(u) = 0
This gives
2000350 350 300 35
45
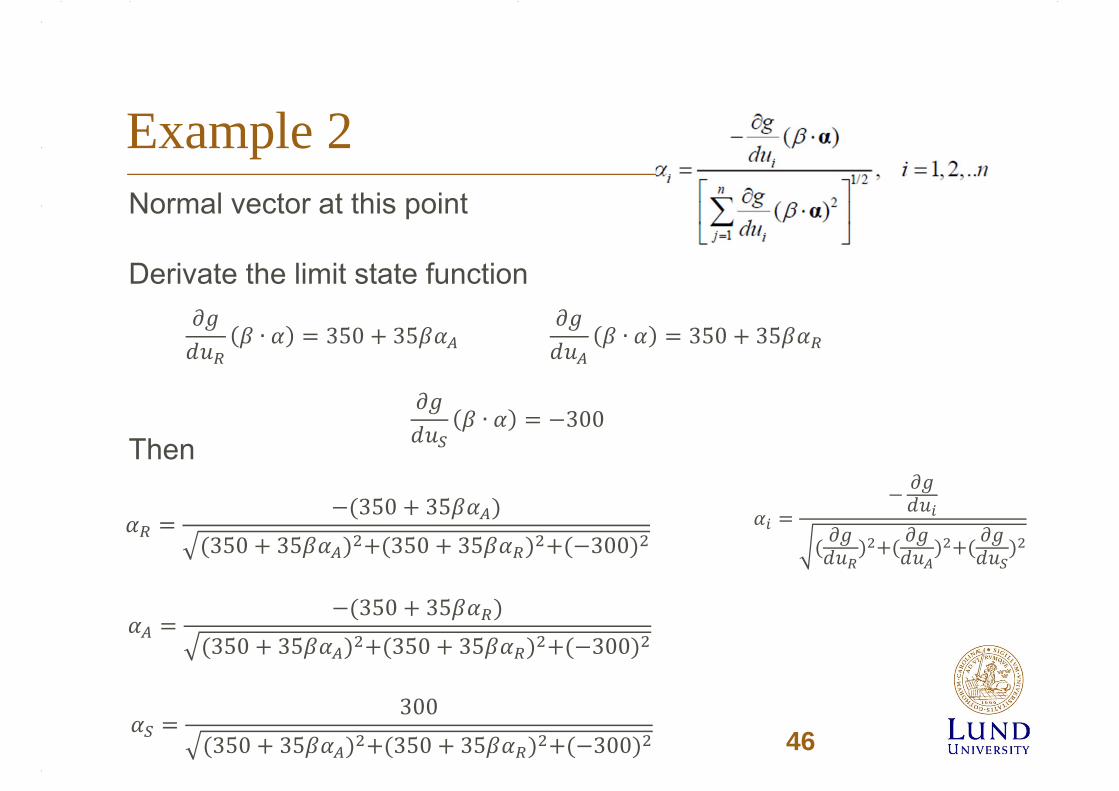
Example 2Normal vector at this point
Derivate the limit state function
Then
∙ 350 35 ∙ 350 35
∙ 300
350 35350 35 350 35 300
350 35350 35 350 35 300
300350 35 350 35 300 46
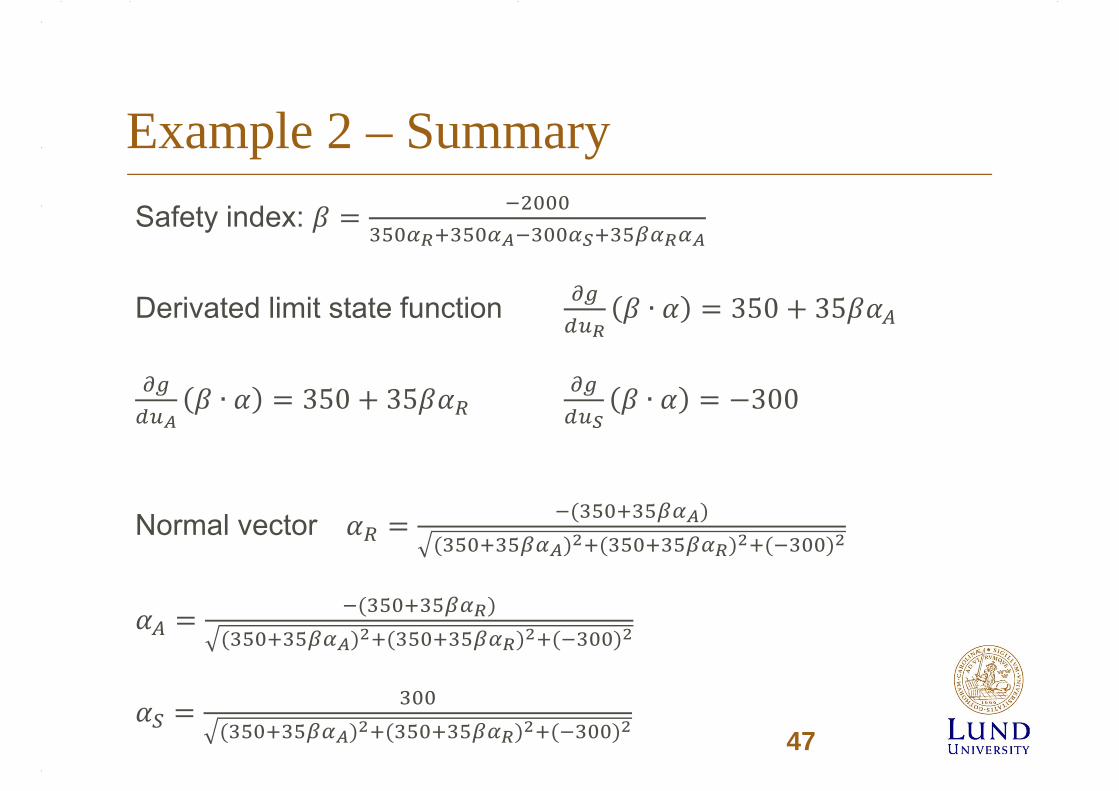
Example 2 – SummarySafety index:
Derivated limit state function ∙ 350 35
∙ 350 35 ∙ 300
Normal vector
47

Example 2 – Iteration
Safety index: 3.74
Start 1 2 3 4 5 6 7β 3 -3.9604 3.162993 3.764099 3.74638 3.744948 3.744835 3.744826αR 1 -0.64088 -0.63663 -0.56327 -0.56049 -0.56102 -0.56099 -0.561αA 1 -0.64088 -0.63663 -0.56327 -0.56049 -0.56102 -0.56099 -0.561αS 1 0.422556 0.435216 0.604532 0.609681 0.60869 0.608749 0.60874∂g/duR 455 438.8344 279.5224 275.7932 276.5072 276.4648 276.4712 276.4707∂g/duA 455 438.8344 279.5224 275.7932 276.5072 276.4648 276.4712 276.4707∂g/duS -300 -300 -300 -300 -300 -300 -300 -300
48
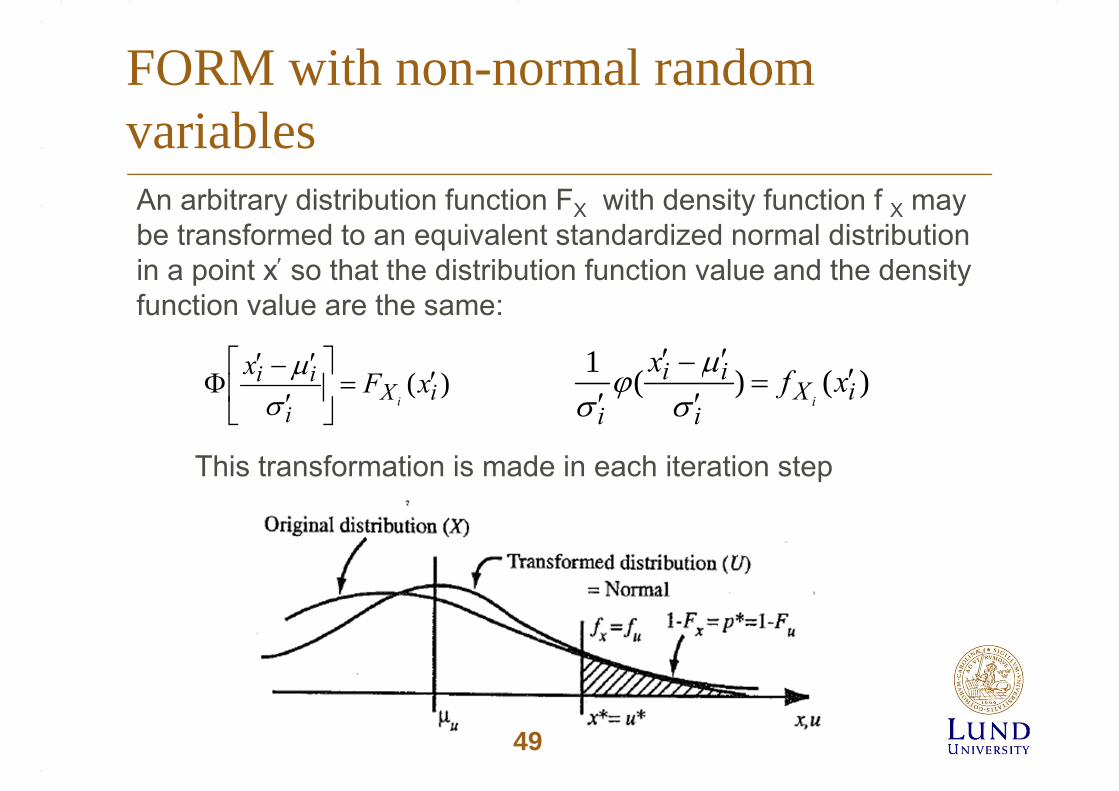
FORM with non-normal random variablesAn arbitrary distribution function FX with density function f X may be transformed to an equivalent standardized normal distribution in a point x so that the distribution function value and the density function value are the same:
)( iXi
ii xFxi
)()(1
iXi
ii
ixfx
i
This transformation is made in each iteration step
49
FORM with correlated, non-normal variables
The random variables are transformed to the U-space of uncorrelated and normalized variables. Two alternative methods may be used:
• The Rosenblatt transformation• The Nataf transformation
The education software COMREL uses the Rosenblatt transformation
50

Second order reliability method (SORM) • Is a more exact method since the expansion of the non-linear
limit state function also includes the second order derivatives of g(X)
FORM
SORMOriginal limit state function
51
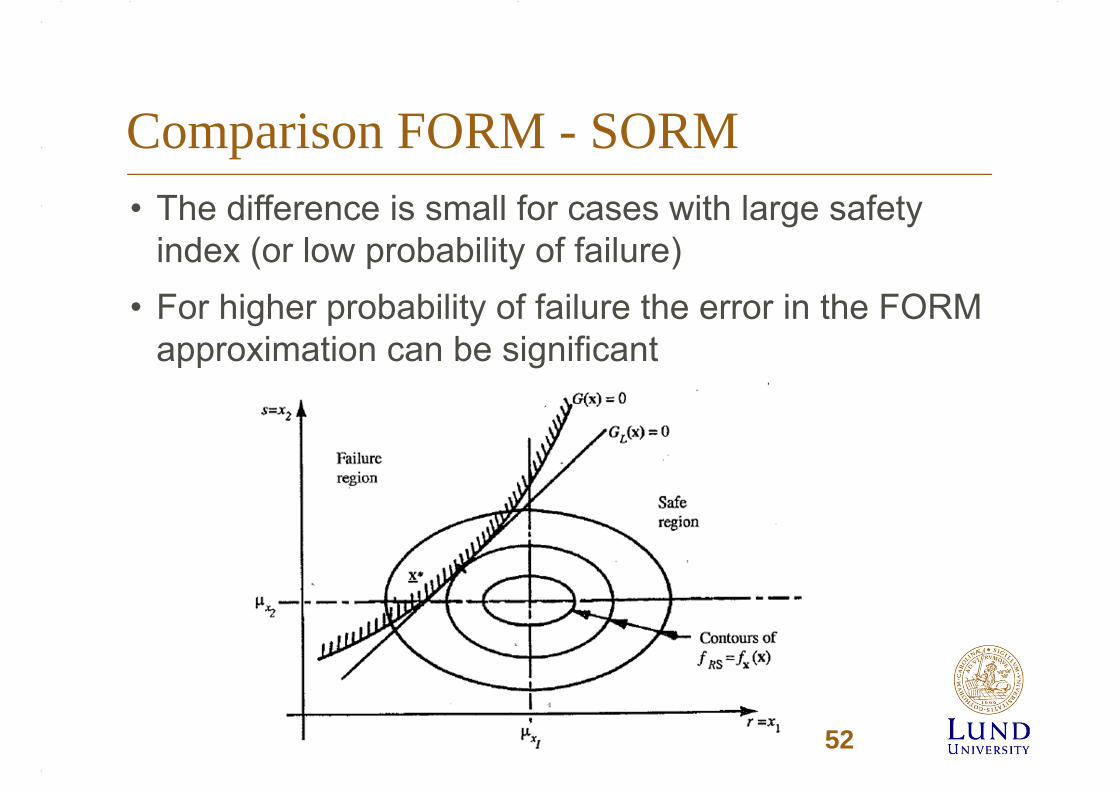
Comparison FORM - SORM• The difference is small for cases with large safety
index (or low probability of failure)• For higher probability of failure the error in the FORM
approximation can be significant
52

• Instead of calculating the reliability index, i.e. the failure probability analytically – it might be much easier to run virtual experiments based on the probabilistic models and the limit state function.
Monte Carlo Simulation
0
2
4
6
8
10
12
14
16
18
20
-2 0 2 4 6 8 10 12Load
Res
ista
nce
mn
p ff
Rand
om num
ber
1
)( iX xFi
jz
jx ix
Random outcome of X
53
Simulation methods
• Crude Monte Carlo simulation (simple but time consuming for low values of pf )
• Importance sampling• Directional simulation• Latin Hypercube simulation• Adaptive simulation methods
Simulation methods can also be used in the case of implicit limit state functions (e.g. FEM models)
54


















