
Relations between the right and left eigenvectors of non-symmetric structural models. Applications...
7
Mechanical Systems and Signal Processing (1988) 2(l), 97-103 RELATIONS BETWEEN THE RIGHT AND LEFT EIGENVECTORS OF NON-SYMMETRIC STRUCTURAL MODELS. APPLICATIONS TO ROTORS Q. ZHANG, G. LALLEMENT AND R. FILLOD Laboratoire de Mkanique AppliquPe, Associe’au CNRS, UFR Sciences et Techniques, Universite’ de Franche-Comtk, 25030 Besanfon CEDEX, France (Received March 1987, accepted October 1987) The case of mechanical structures which must be represented by non-symmetric matrices is considered. The relations between the right and left eigenvectors is established for the general case and for the particular case of axisymmetric rotors with non-symmetric coupling. These relations simplify the problem of modal identification of mechanical structures when the non-symmetric part is known. They also prove to be useful in the analysis of the dynamic behaviour of axisymmetric rotors by accounting for gyroscopic effects. 1. INTRODUCTION The dynamic behaviour of certain mechanical structures is representable by a discretised linear asymmetric model of the following form Mjqt)+Bj(t)+Ky(t)=f(t) (1) where: M, B, K E R”‘“, M = MT positive definite, B # BT, K # K T. The following technical cases can be cited as examples. Structures having feedback loops which are linear functions of the state variables. Rotors which must be represented by non-symmetric models because (a) of gyroscopic effects; (b) of the non-symmetric stiffness and damping matrices of fluid bearings. In this case, for preliminary calculations of the structure’s dynamic behavior and for a stability analysis, it is useful to have available a modal base composed of the eigenvalues S = diag {s,} E @Zn*2”, the 2n eigenvectors y, of the initial system [s:M+s,B+K]y,=O (2) regrouped in the matrix Y = [a - - yy * - *] E C”*2n and designated the matrix of right eigen- vectors (abbreviation, RE) the 2n eigenvectors JJ~ of the adjoint system [s;MT+s,BT+KT]y:=O (3) regrouped in the matrix Y* = [* * * yz * * *] E Ch2” and designated the matrix of left eigen- vectors (abbreviation, LE). The properties of non-symmetric systems and the problem of modal identification of this type of system have been studied by several authors [l]-[4]. A significant number of modal identification methods for symmetric systems are applicable to the non-symmetric case for identifying eigenvalues and right eigenvectors. But in order to identify the left eigenvectors it has been necessary to measure at least one line of the transfer matrix, that is to say, to conduct tests with linearly independent 97 0888-3270/88/020097+08 $03.00/O @ 1988 Academic Press Limited
Transcript of Relations between the right and left eigenvectors of non-symmetric structural models. Applications...

Mechanical Systems and Signal Processing (1988) 2(l), 97-103
RELATIONS BETWEEN THE RIGHT AND LEFT EIGENVECTORS OF NON-SYMMETRIC STRUCTURAL MODELS.
APPLICATIONS TO ROTORS
Q. ZHANG, G. LALLEMENT AND R. FILLOD
Laboratoire de Mkanique AppliquPe, Associe’ au CNRS, UFR Sciences et Techniques, Universite’ de Franche-Comtk, 25030 Besanfon CEDEX, France
(Received March 1987, accepted October 1987)
The case of mechanical structures which must be represented by non-symmetric matrices is considered. The relations between the right and left eigenvectors is established for the general case and for the particular case of axisymmetric rotors with non-symmetric coupling. These relations simplify the problem of modal identification of mechanical structures when the non-symmetric part is known. They also prove to be useful in the analysis of the dynamic behaviour of axisymmetric rotors by accounting for gyroscopic effects.
1. INTRODUCTION
The dynamic behaviour of certain mechanical structures is representable by a discretised linear asymmetric model of the following form
Mjqt)+Bj(t)+Ky(t)=f(t) (1)
where: M, B, K E R”‘“, M = MT positive definite, B # BT, K # K T. The following technical cases can be cited as examples. Structures having feedback
loops which are linear functions of the state variables. Rotors which must be represented by non-symmetric models because (a) of gyroscopic effects; (b) of the non-symmetric stiffness and damping matrices of fluid bearings.
In this case, for preliminary calculations of the structure’s dynamic behavior and for a stability analysis, it is useful to have available a modal base composed of the eigenvalues S = diag {s,} E @Zn*2”, the 2n eigenvectors y, of the initial system
[s:M+s,B+K]y,=O (2)
regrouped in the matrix Y = [a - - yy * - *] E C”*2n and designated the matrix of right eigen- vectors (abbreviation, RE) the 2n eigenvectors JJ~ of the adjoint system
[s;MT+s,BT+KT]y:=O (3)
regrouped in the matrix Y* = [* * * yz * * *] E Ch2” and designated the matrix of left eigen- vectors (abbreviation, LE).
The properties of non-symmetric systems and the problem of modal identification of this type of system have been studied by several authors [l]-[4].
A significant number of modal identification methods for symmetric systems are applicable to the non-symmetric case for identifying eigenvalues and right eigenvectors. But in order to identify the left eigenvectors it has been necessary to measure at least one line of the transfer matrix, that is to say, to conduct tests with linearly independent
97 0888-3270/88/020097+08 $03.00/O @ 1988 Academic Press Limited

98 Q. ZHANG ET AL
excitations at all the dof where there are sensors. Now, these conditions are, from a practical standpoint, very restricting and often difficult to realise.
In this paper, only “simple” structures will be treated, that is to say, systems which are strictly diagonalisable (no Jordan blocks). In this case, a direct relation between the RE and the LE can be established. Theoretically, this study completes the knowledge of the dynamic properties of this type of structure. Practically, these relations allow the LE to be evaluated directly from the RE.
2. SEVERAL RELATIONS BETWEEN THE RE AND THE LE
Equations (2) and (3) can be rewritten in the form
[A-s,,U]x,=O+AX=UXS
[Ar - s,U’]x; = O+ A7X* = UrX*S
where the state matrices A # A7; U # UT E RNsN, N = 2n, have
(4)
(5)
the form:
A=[-, c]: U=[; ;]
and where the matrices X; X* E CNsN are the right and left modal matrices, respectively, and have the form:
x=[&]; x*=[;J 2.1. FORMULATION
2.1.1.
The state matrices A and U can be decomposed in a unique way in the form
A=As+AA; u=u,+u, (6)
where
As = A:; AA = -A;; us = UC; UA = -u,‘.
The matrices AA and UA depend on the non-symmetric part of the structure and are considered to be known. The symmetric matrices As, Us are considered unknown.
2.1.2.
The RE and the LE are normalised according to the definition:
*. xjv =xjv9 X:TUX,= 1; ~=l,..., N (7)
where j designates any degree of freedom. In practice, the dof j is often one of the dof where an exterior force is applied.
2.1.3.
The right eigenvectors can be expressed on the complete base of N left eigenvectors:
x = x*p; PE @N*N (8)
The matrices X and X* are obviously non-singular. The matrix P is thus invertible, yielding
X* =xp-’ (9)
RIGHT AND LEFT EIGENVECTORS OF NON-SYMMETRICAL STRUCTURAL MODELS 99
2.2. EVALUATION OF THE MATRIX P
2.2.1. Evaluation of the ofldiagonal elements of the matrix P.
According to equation (6), the matrices A and U can be rewritten
A=AT+A,-A;; U=UT+UA-U; (10)
Introducing these two expressions for A and U into (4) and taking into account (8) (where x, = X*p,), yields:
[A’ - s,UT]X*p, + Qx, = 0 (11)
where Q~(AA-A~)-sS,(UA-U~)=2(A,_,-~,UA). Premultiplying equation (11) by XT and taking into account the orthonormal relations
X*TUX= IN; X*TAX = S,
gives
[S-Gvl~v = -XTQsv, v= 1,. . .) Iv. (12)
Hence, for v # a, the component pVy of the vector py defined from equation (8) by: x, = X*p, = C,“=, x$p,,, has the form
P _ x:Qxv .
uy (s,-q,)’ cr#v;v,a=1,..., N. (13)
The matrix Q is anti-symmetric, yielding: x;Qx, = 0. The component pyy, v = 1, . . . , N thus cannot be evaluated from equation (2).
2.2.2. Evaluation of the diagonal elements of P
From the equation: x, = X*p,, the component Xjy of the vector x, can be written
xjv = i x$rPo~; rr,v=l,..., N. (14) C7=*
Having previously imposed the condition; ~7~ = xj,, the component pyy sought is given
by
(15)
3. PARTICULAR RELATIONS BETWEEN RE AND LE FOR AXISYMMETRIC STRUCTURES WITH NON-SYMMETRIC COUPLING
A technical example of this type of structure is the case of an axisymmetric rotor mounted on fluid bearings (Fig. 1). The coupling between the motion in the x’ and y’ directions (the x’ and y’ axes define a plane perpendicular to the rotation axis .?) are due to gyroscopic effects and to the fluid bearings.
In this case, equations (2) and (3) can be rewritten by partitioning into submatrices as follows
[s: ::I [:I =O (16)

100 Q. ZHANC; ET 4L
Figure 1
(17)
where
C, =s2Mx,+sB,,+ K,.,; Cl = sBxy -t Kxy C, = sB, + K,,; C4 = s2Myy + sByy + I&
u( u*) E @n’2 is the right sub-eigenvector (left sub-eigenvector) containing the generalised modal displacements along the x’ axis and rotations around the y’ axis u( u*) E C”‘* is the right sub-eigenvector (left sub-eigenvector) containing the generalised modal displacements along the 9 axis and rotations around the I axis s is an eigenvalue of the homogeneous problem, equation (16) K,, K,, B, and B,, are the sub-matrices responsible for the coupling between the generalised displacements in the x’ - y’ and ~7 - i planes.
In addition, it is supposed that all the eigenvalues s, of equation (17) are distinct. The matrices C, and C, are thus regular.
The submatrices C, and C, are symmetric since they depend only on forces deriving from a Lagrangian.
In addition, given that the rotor-stator assembly less bearings is axisymmetric, it follows that C, = C,. In the following, the relations between subvectors of the right and left eigenvectors are studied for different coupling configurations, that is, for different par- ticular cases with respect to the relation between the submatrices C2 and C3.
Case no. 1 If C, = Cr; C3 = CT, it follows that:
*_ v -a,u; u*=Ly v 2
Case no. 2 If C2 = -C:; it follows that:
u*=p,u; v* = p2v
Case no. 3 If C2 = C:; C, = CT and C2 = -C3, it follows that:
u=*ju; a* = fju*; v* = 6u; u* = *jjsv
where CQ, pi, i = 1, 2 and 6 are constants. Proof: Only property no. 1 is proved here. The remaining two properties can be proved
by analogous reasoning.

RIGHT AND LEFT EIGENVECTORS OF NON-SYMMETRICAL STRUCTURAL MODELS 101
Taking into account the conditions: C: = C,, C:=C,, C:=C,, C,=Ciand C,=C,, the relations (16) and (17) become:
c,u+c*v=o (19)
c,u+c,u=o (20)
clu*+c32)*=o (21)
c*u*+c,v*=o (22)
Expressing u as a function of u and u* as a function of V* gives
b - -C;‘C3u and u* = -C;‘C3u*
and substituting these expressions into equations (19) and (22) yields
[C, -c2C;‘CJU = 0 (23)
[C, -c,c;‘c,]V* = 0. (24)
Accounting for the fact that the matrix [C, -C2C;‘C3] is singular of rank (n - l), in order to simultaneously satisfy equations (23) and (24), u* and u must be colinear: v* = (Y,u. By an analogous reasoning, it can be shown that
[C,-c3c;‘c*]u*=o
[C, - c3c;‘cz]V = 0.
Thus u* = (Y*u.
4. DISCUSSION AND CONCLUSION
4.1. The relations (13) and (15) show that the LE are related to the RE only by the
non-symmetric part of the structure. This non-symmetric part can be due to: gyroscopic forces; feedback forces in active control; circulatory forces. Because of these factors, these ‘additional effects’ can in certain cases be estimated by calculations or in other cases, be identified by measurements on test structures specially designed with this goal in mind. If these conditions can be satisfied, the LE can then be obtained by a direct calculation using the identified RE.
4.2. In practice, only m( m < IV) RE are available and the LE are thus expressed by a linear
combination on the reduced base. Expression (13) for the elements pcy shows that the truncation errors depend on the value of the bilinear form xzQxy with respect to u and on the density of the spectrum of eigenfrequencies. These truncation errors are generally negligible if o,,,+~ >> w,.
4.3. The three properties presented in section 3 represent sufficient but not necessary
conditions. These conditions correspond to the classical cases encountered in the technical problems of rotors. As an example, consider the case of a rotor mounted of ball bearings and rotating at high velocities. In this case: C, = C,; C, = C:; C, = CT.

102 Q. ZHANCi ETAL.
If the gyroscopic effects of the shaft and discs are accounted for, then C2 = -CT, yielding: u* = p, u, u* = &u.
If gyroscopic effects of the shaft are neglected, the matrices Cz and C, are diagonal and the conditions of case 3 are then satisfied.
4.4. TECHNICAL APPLICATIONS OF THE PROPOSED METHOD
Two types of applications can be envisioned.
(a) Prediction of the dynamic behaviour of a system Consider the following case
(i) the symmetric matrices A, and U, are unknown (ii) the antisymmetric matrices AA and UA are known (for example, resulting from
additional tests or analytical modeling) (iii) in addition, the spectral matrix S and the right-hand modal matrix X are known
(for example, resulting from dynamic tests followed by a modal identification). Using the proposed method, it is possible to predict 1. the modifications in the dynamic behaviour in free and forced vibrations due to the
introduction of known structural modifications represented by the modification matrices AA; AU
2. the particular solution corresponding to an exterior excitation.
(b) Inverse application of equations (13) and (15) Consider the cases where (i) the spectral matrix S and the right and left modal matrices X; X* can be directly
identified by other techniques such as those described in refs [7] and [9] (ii) the matrices AA and U, are unknown. Since equations (13) and (15) are linear with respect to the unknown elements contained
in the matrices AA; UA, these equations can be used to identify these elements.
REFERENCES
1. 0. DATQEK 1977 Proceedings of the XZth Conference on Dynamics of Mechanics, Prague. Stabilite dynamique des systemes continus unidimensionnels.
2. I. FAWZY and R. BISHOP 1976 Proceedings of the Royal Society, London A352, 25-40. On the dynamics of linear non-conservative systems.
3. D. J. INM4N 1983 Journal of Applied Mechanics SO, 199-203. Dynamics of asymmetric non- conservative systems.
4. R. BIGRET 1982 Proceedings of the 2nd International Modal Analysis Conference, Orlando, FL, pp. 1035-1042. Elements for the modal analysis of symmetric and non-symmetric transfer matrix structure.
5. R. NORDMANN 1984 Journal of Vibration Acoustics Stress in Design 106, 107-l 12. Identification of modal parameters of an elastic rotor with oil film bearing.
6. Q. ZHANC; and G. LALLEMENT 1985 Proceedings of the 3rd International Modal Analysis Conference, Orlando, FL, pp. 786-774. Experimental determination of eigensolutions of non-self- adjoint mechanical structure.
7. Q. ZHANC~, G. LALLEMENT and R. FIL.LOD 1985 ASME Paper No. 85-DET-109. Modal identification of self-adjoint and non-self-adjoint structures by additional masses technique.
8. Q. ZHANG 1987 Doctoral thesis, Universite de Franche-Comtt. Identifications modale et para- metrique des structures mecaniques auto-adjointes et non-auto-adjointes.
9. R. FILLOD 1980 Doctoral thesis, UniversitC de Franche-Corn& Contribution 21 I’identification des structures mecaniques lineaires.
RIGHT AND LEFT EIGENVECTORS OF NON-SYMMETRICAL STRUCTURAL MODELS 103
A-’ A: iJcRNsN
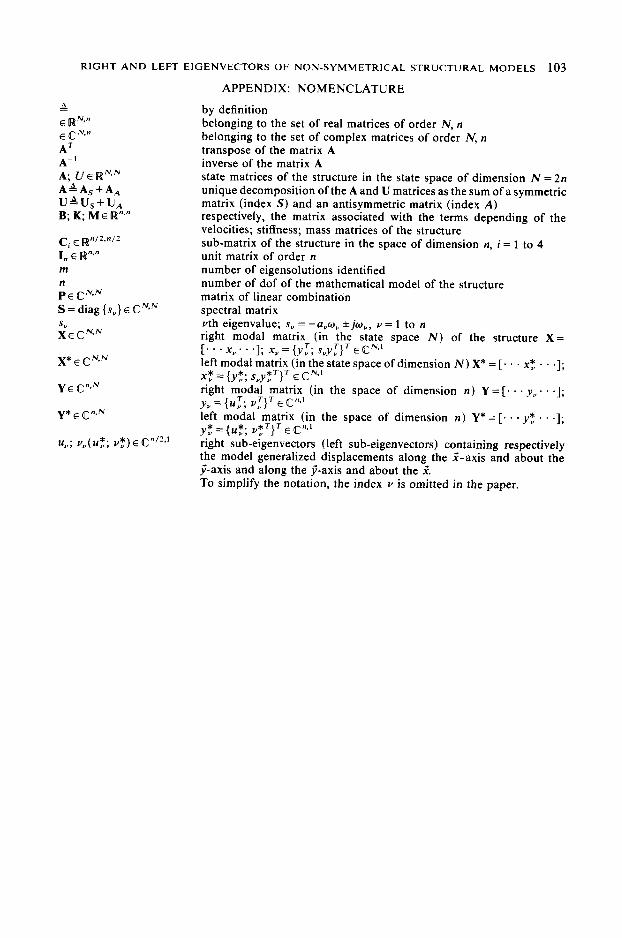
APPENDIX: NOMENCLATURE
by definition belonging to the set of real matrices of order N, n belonging to the set of complex matrices of order IV, n transpose of the matrix A inverse of the matrix A state matrices of the structure in the state space of dimension N = 2n unique decomposition of the A and U matrices as the sum of a symmetric matrix (index S) and an antisymmetric matrix (index A) respectively, the matrix associated with the terms depending of the velocities; stiffness; mass matrices of the structure sub-matrix of the structure in the space of dimension n, i = 1 to 4 unit matrix of order n number of eigensolutions identified number of dof of the mathematical model of the structure matrix of linear combination spectral matrix vth eigenvalue; s, = -a,~, +jwy, v = 1 to n right modal matrix (in the state space N) of the structure X= [..‘x,...];x,={y~;s”yl}TE@N.’ left modal matrix (in the state space of dimension N) X* = [. . . x2 . . e]; x~={y~;svy:T}TE@N7' right modal matrix (in the space of dimension n) Y = [. . . y, * . .I; y, = {UT: VTIT E a)-’ idft modal-matrix (in the space of dimension n) Y* =[. . . yz e . .I; y$={uZ; v:T}TE@nJ right sub-eigenvectors (left sub-eigenvectors) containing respectively the model generalized displacements along the Z-axis and about the q-axis and along the ?-axis and about the 2. To simplify the notation, the index v is omitted in the paper.


















