
Recent Developments in Analysis of Uncertainty in TAM · stochastic linearization method for...
108
Isaac Elishakoff Florida Atlantic University [email protected] (With Xiaojun Wang, BU,PRC; Yongjian Ren, PRC; Lova Andriamasy EDF-Electricité de France, Paris, France) 1 Recent Developments in Analysis of Uncertainty in TAM Uncertain Mechanics = Stochastic Mechanics + Non-Stochastic Mechanics Non Stochastic Mechanics = Fuzzy Mechanics + Convex Mechanics
Transcript of Recent Developments in Analysis of Uncertainty in TAM · stochastic linearization method for...

Isaac Elishakoff Florida Atlantic [email protected]
(With Xiaojun Wang, BU,PRC; Yongjian Ren, PRC; Lova Andriamasy EDF-Electricité de France, Paris, France)
11
Recent Developments in
Analysis of Uncertainty in TAM
Uncertain Mechanics = Stochastic Mechanics + Non-Stochastic Mechanics
Non Stochastic Mechanics = Fuzzy Mechanics + Convex Mechanics

22
Dedicated to the
blessed memory
of
Professor
H.D.BUI

3

4

5

6

Criterion : Minimum mean-square deviation between the original non-linear expression of the force ϕ(X),and the linear counterpart .
(X = displacement, = spring constant of the equivalent linear system)
MULTIPLE COMBINATIONS OF THE STOCHASTIC
LINEARIZATION CRITERIA BY THE MOMENT APPROACH
� 1953 � J.R. Booton
1954 � I.E. Kazakov
1954 � T.K. Caughey
1980 � S.H. Crandall
77
stochastic linearization method for non-linear random vibration
Xkeq
eqk
Stochastic Mechanics

� First criterion
� Second criterion added by Kazakov :
88
[ ] ( )21 XE)X(XEk )(eq ϕ=
Equivalent Spring Constant
[ ] [ ]22 )Xk(E)X(E eq=ϕ
( )222 XE)]X([Ek )(eq ϕ=

Basic Equations
� Single degree of freedom system :
� Method of moments :� substitution of ϕ(X) by
� Error :
� deficiency probabilistically orthogonal to X : =0
=
99
)t(F)X()X(Xm =++ &&& ψϕϕ(X) : non-linear restoring force
: non-linear damping force
m : mass
F(t) : excitation with specified probabilistic properties
)X( &ψ
Xkeq
Xk)X()X( eq−= ϕεϕX),X(ϕε
XX
XXkeq ,
),(ϕ= )(
eqk 1

� Error , between the damping force and its linear replacement :
� = 0
1010
)X( &ψε )X( &ψXceq&
Xc)X()X( eq&&& −=ψεψ
X),X( &&ψε=eqc
)(eqcX,XX),X( 1=&&&&ψ
Second criterion ≈ [ ] ( )
= 22 XcE)X(E eq
&&ψ
[ ] )X(E)X(Ec )(eq
222 &&ψ=

Re-Derivation of Energy Criteria
� New criterion : the potential energy of the system� Potential energy of deformation :
� Potential energy of the associated equivalent linear spring :
Deficiency :
Moments method � = 0
1111
∫=X
dx)x()X(P0
ϕ
22Xk)X(P eqeq =
22Xk)X(P)X( eqp −=ε
2X),X(pε[ ] )()(2 42)3( XEXPXEkeq =
Another criterion : [ ] ( )
=222 2XkE)X(PE eq
[ ] )())((2 42)4( XEXPEkeq =
X. Zhang

� Criterion based on the complementary energy :
= 0
1212
)X(P)X(X)X(C −= ϕ
22Xk)X(C)X( eqc −=ε
2X),X(pε
Additional criterion :
[ ] ( )222 2XkE)X(CE eq= [ ] )()(2 42)6( XEXCEkeq =
[ ] )X(E)X(CXEk )(eq
225 2=

Linearization of Damping
� Energy dissipation function :
Residual stemming due to the replacement of the damping force �
= 0
1313
∫=X
dz)z()X(D
&
&
0
ψ
22Xc)X(D eqD&& −=ε
2X,D&ε [ ] )X(E)X(DXEc )(
eq423 2 &&&=
Equality of the mean-square values : [ ] ( )
=222 2XcEDE eq
&
[ ] )X(EDEc )(eq
424 2 &=

Probability density
� If is known, we can evaluate and , because :
� Approximation :
=
=
Differential equation known in the random vibration literature
1414
)x(pX eqk eqc
∫∫∞
∞−
∞
∞−
== dx)x(px)X(E,dx)x(xp)X(E XX &&&&
222
)x(p~)x(p XX ≈)X(E 2 2
X~σ
)X(E 2& 2X
~&σ
( ) ( )XeqeqXeqeq~cc,~kk &σσ ==
( ) ( ) )t(FX~cX~kXm XeqXeq =++ &&&&σσ

Criteria Based Upon Approximating Probability
Density� Booton/Kazakov First criterion with approximate probability density
� Potential energies criterion :
minimal
1515
( )[ ] ( )[ ]{ ( )[ ] } 0~~2~~ 2222 =+ϕ−ϕ=−ϕ XeqXeqXeq
eqXeq
kXXEkXEdk
dXkXE
dk
d σσσσ
)(eqk 7
( )[ ] ( )[ ]222 2Xk~XPEPE eqX −= σ∆
( )[ ] ( )[ ]{ ( )[ ] } 04)(~~ 42222 =+−=∆ XEkXPXEkXPEdk
dPE
dk
deqXeqX
eqeq
σσ
)(eqk 8

� Complementary energy criterion :
minimal
1616
( )[ ] ( )[ ]222 2XkXCECE eqX~ −= σ∆
( )[ ] ( )[ ]{ ( )[ ] } 04)(~~ 42222 =+−=∆ XEkXCXEkXCEdk
dCE
dk
deqXeqX
eqeq
σσ
)(eqk 9
� For derivation of :
minimal
�Minimum mean-square difference :
( )[ ] [ ]22 )( XcXEFE eqD&& −=∆ ψ
eqc
( )[ ] ( )[ ]{ ( )[ ] } 04)(~~ 42222 =+−=∆ XEcXDXEcXDEdc
dDE
dc
deqXeqX
eqeq
&&&&&& σσ
)(eqc 8
( ) [ ]2222Xc)~X(ME)X(ME eqX
&&&& −=
σ∆
( )[ ] ( )[ ]{ ( )[ ] ( )[ ] } 04)(~~~)( 422222 =+−−=∆ XEcXMXEXMXEcXMEdc
dXME
dc
deqXXeqX
eqeq
&&&&&&&&&& σσσ
)(eqc 9

Why so many criteria ?� 9 different criteria for evaluating the equivalent stiffness
9 different conditions for evaluating the stiffness coefficient
9² = 81 criteria for nonlinear stochastic problem.
1717
eqk
eqc
So Why ?
Why not !

1818
How can you govern a
country which has 246
varieties of cheese?
Charles De Gaulle, in "Les Mots du
General", 1962
French general & politician (1890 - 1970)

1919
Plenty of criteria to solve linear deterministic problems :
� Methods :
- Numerical integration
- Successive approximations
- Rayleigh-Ritz
- Bubnov-Galerkin
- Petrov-Galerkin
- Finite difference
- Finite elements
- etc.
How to choose ? Accumulation of experience
� Failure criteria :
- Maximum stress
- Maximum strain
- St-Venant's criterion
- Tresca criterion
- Goldenblat-Kopnovcriterion
- Tsai-Wu criterion
- etc.

Acta Mechanica 204, 89-98 (2009)
Isaac Elishakoff . Lova Andriamasy . Melanie Dolley
Application and extension of the stochastic
linearization by Anh and Di Paola
2020

21
General Methodology for
Hybrid Theoretical, Numerical
and Experimental
Analysis of Uncertain Structures
(With Prof. Xiaojun Wang and Prof.
Zhiping QiuInstitute of Solid Mechanics, Beijing University of Aeronautics and
Astronautics)

« Data ! Data ! Data ! »
He cried impatiently.
« I can’t make bricks
without clay. »
22
Sherlock Holmes to Dr. Watson« The Adventure of the Copper Beeches »

23
Two-Sided Approach
Theodorus of Cyrene

24
� Comparisons of Convex Modeling and Interval Analysis through numerical examples
� Convex Analyses for Vibration and Buckling of Composite Shells Based on Experimental Data
� Application and Extension of the Stochastic Linearization by Anh and Di Paola
� Conclusions
Main Contents

25
a. Determine the smallest hyper-rectangle and the smallest ellipsoidcontaining the given experimental data using the Method by Zhu, Elishakoff and Starnes
b. Convex Modeling and Interval Analysis for the Structural Response
c. Seven-Bar Planar Truss Structure (inclusion relation between the derived ellipse and rectangle)
� The principal axes of the derived ellipse and rectangle are parallel to the global coordinate system
� The principal axes of the derived ellipse and rectangle are not parallel to the global coordinate system
d. Sixty-Bar Space Truss Structure (non-inclusion relation between the derived
ellipse and rectangle)
Comparisons of Convex Modeling and Interval Analysi s

26
1 2( , , , )ma a a a= L
( 1, 2, , )ia i m= L
( ) ( 1,2, , )ra r M= LM experimntal points
0 0( ) ( ) 1Ta a W a a− − ≤Convex modeling assumes that all these experimental points belong to an ellipsoid
Uncertain parameters
m-dimensional parameter space
( ) ( 1,2, , )rb r M= L1 2 1( , , , )m mT θ θ θ −L
Transformation matrixRotated coordinate system
Method by Zhu, Elishakoff and Starnes (1)

27
m-dimensional box contains all M points
0b b d− ≤
1 2( , , , )Tmd d d d= L0 10 20 0( , , , )T
mb b b b= L
( )( )
( ) ( )
( ) ( )0
1max( ) min( ) ,
21
max( ) min( ) ,2
r rk k k
rr
r rk k krr
d b b
b b b
= −
= +( 1, 2, , ; 1, 2, , )r M k m= =L L
Vector of central points Vector of semi-axes
Method by Zhu, Elishakoff and Starnes (2)

28
Enclose the previous box by an ellipsoid2
02
1
( )1
mk k
k k
b b
g=
− ≤∑
1
m
e m kk
V C g=
= ∏Ellipsoid with minimum volume
Volume of an m-dimensional ellipsoid
The semi-axes of the ellipsoid kg
, ( 1,2, , )i ig md i m= = L
Much smaller without experimental points at the corner of the box
kgη
( )2( )0
21
max 1rm
k k
rk k
b b
gη
=
−= ≤∑ ( 1,2, , )r M= L
replaced by
Method by Zhu, Elishakoff and Starnes (3)

29
Rewrite the ellipsoid in the form
0 0( ) ( ) 1Tb b D b b− − ≤
Rewrite the volume of the ellipsoid
1
mm
e m kk
V C gη=
= ∏( )2 2 2
1 2( ) , ( ) , , ( )mD diag g g gη η η− − −= L
{ }1 2 1
1 2 1, , ,min ( , , , )
me e mV V
θ θ θθ θ θ
−−=
L
L1 2 1( , , , )m mT θ θ θ −L
0 0T
ma T b=T
m mW T DT= 0 0( ) ( ) 1Ta a W a a− − ≤The smallest ellipsoid
Method by Zhu, Elishakoff and Starnes (4)
30
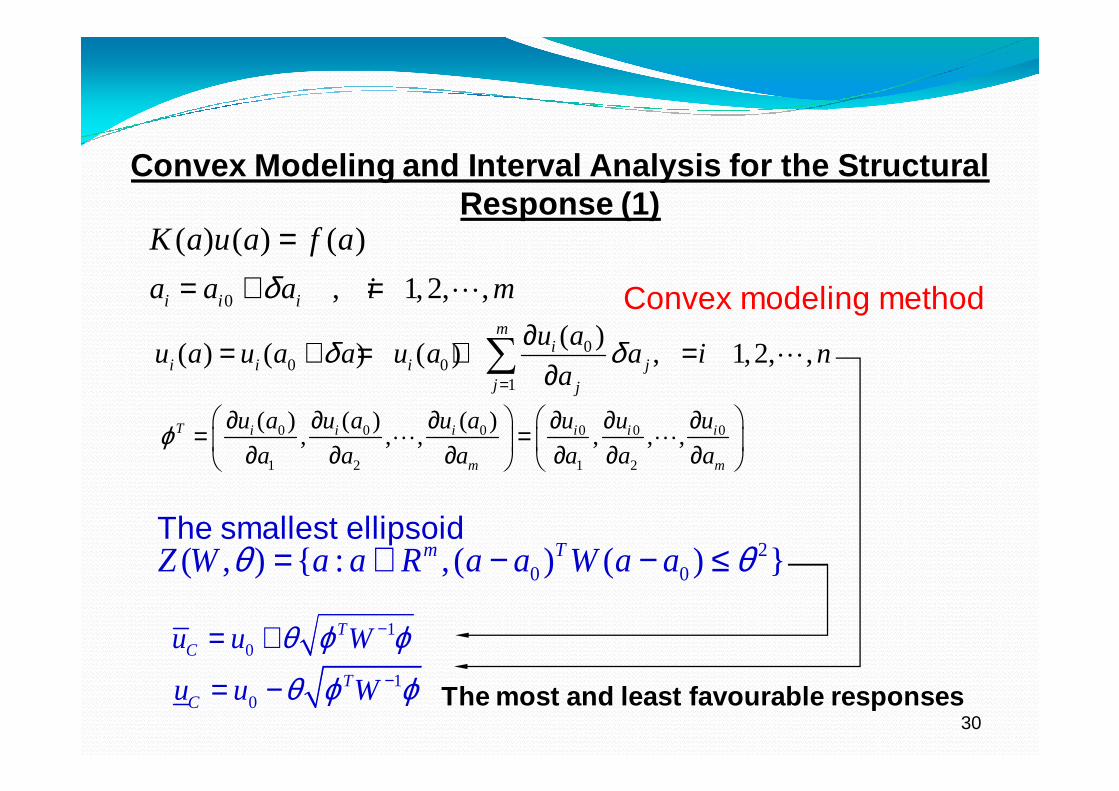
( ) ( ) ( )K a u a f a=
20 0( , ) { : , ( ) ( ) }m TZ W a a R a a W a aθ θ= ∈ − − ≤
0 , 1, 2, ,i i ia a a i mδ= + = L
00 0
1
( )( ) ( ) ( ) , 1,2, ,
mi
i i i jj j
u au a u a a u a a i n
aδ δ
=
∂= + = + =∂∑ L
0 0 0 0 0 0
1 2 1 2
( ) ( ) ( ), , , , , ,T i i i i i i
m m
u a u a u a u u u
a a a a a aϕ
∂ ∂ ∂ ∂ ∂ ∂= = ∂ ∂ ∂ ∂ ∂ ∂ L L
Convex modeling method
The smallest ellipsoid
The most and least favourable responses1
0T
Cu u Wθ ϕ ϕ−= −
10
TCu u Wθ ϕ ϕ−= +
Convex Modeling and Interval Analysis for the Struc tural Response (1)

31
0 0a a a a a− ∆ ≤ ≤ + ∆
00 0
1
( )( ) ( ) ( ) , 1, 2, ,
mi
i i i jj j
u au a u a a u a a i n
aδ δ
=
∂= + = + =∂∑ L
The smallest hyper-rectangle
The most and least favourable responses
00
1
mi
iI i jj j
uu u a
a=
∂= − ∆
∂∑ 00
1
mi
iI i jj j
uu u a
a=
∂= + ∆∂∑
Interval analysis method
Convex Modeling and Interval Analysis for the Struc tural Response (2)

32
y
x
200, 5E A= =
1
2 4
3(0, 0)
(2, 0)
(1, 1) (3, 1)
(4, 0)5
1F 2F
A 7-bar planar truss structure
Seven-Bar Planar Truss Structure

33
Rectangle and ellipse containing the data on uncertain parameters and 1F 2F
0.75 0.85 0.95 1.05 1.15 1.250.85
0.9
0.95
1
1.05
1.1
1.15
F1
F2
3max yCu
3min yCu
3min yIu
3max yIu
Principal axes are parallel to the global coordinat e system : CASE I

34Rectangle and ellipse containing the data on uncertain parameters and
1F 2F
0.85 0.9 0.95 1 1.05 1.1 1.150.9
0.95
1
1.05
1.1
F1
F2
3max yCu
3min yCu
3min yIu
3max yIu
Principal axes are not parallel to the global coordinate system : CASE I
35
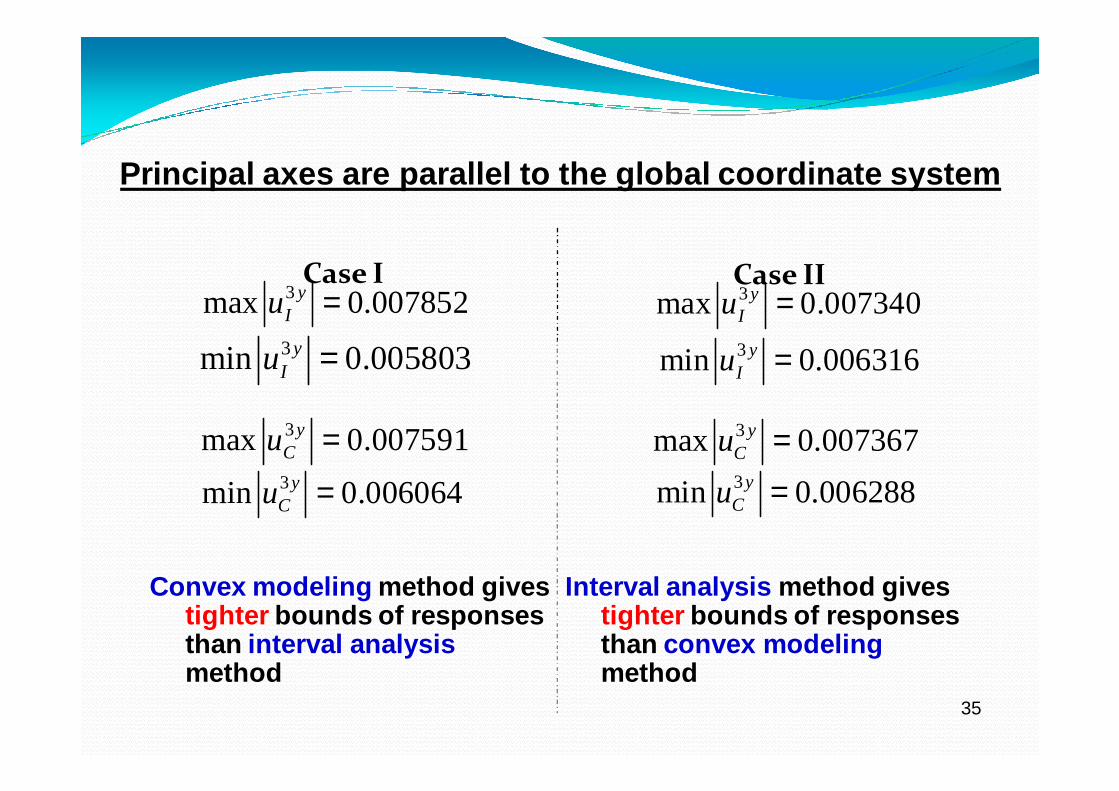
Case I Case II
3min 0.005803yIu =
3max 0.007852yIu =
3min 0.006064yCu =
3max 0.007591yCu =
3min 0.006316yIu =
3max 0.007340yIu =
3min 0.006288yCu =
3max 0.007367yCu =
Interval analysis method gives tighter bounds of responses than convex modeling method
Convex modeling method gives tighter bounds of responses than interval analysis method
Principal axes are parallel to the global coordinat e system

36
Rectangle and ellipse containing the data on uncertain parameters and1F 2F
0.1 0.2 0.3 0.4 0.5 0.61.1
1.2
1.3
1.4
1.5
1.6
F1
F2
3max yCu
3min yCu
3max yIu
3min yIu
Principal axes are parallel to the global coordinat e system : CASE I

37
Rectangle and ellipse containing the data on uncertain parameters and1F 2F
0.2 0.25 0.3 0.35 0.4 0.45 0.51.25
1.3
1.35
1.4
1.45
1.5
F1
F2
3max yCu
3min yCu
3max yIu
3min yIu
Principal axes are not parallel to the global coordinate system : CASE II

38
Case I Case II
Interval analysis method gives tighter bounds of responses than convex modeling method
Convex modeling method gives tighter bounds of responses than interval analysis method
3min 0.004855yIu =
3max 0.006970yIu =
3min 0.004972yCu =
3max 0.006854yCu =
3min 0.005384yIu =
3max 0.006441yIu =
3min 0.005247yCu =
3max 0.006578yCu =
Principal axes are not parallel to the global coordinate system

39
2
2
2
2
2
1
3
123 4
56
78
910
1112
1314
1516
1718
1920
2122 23 24
2F1F
Sixty-Bar Space Truss Structure

40Rectangle and ellipse containing the data on uncertain parameters and
1F 2F
0.24 0.29 0.34 0.39 0.44 0.491.25
1.3
1.35
1.4
1.45
F1
F2
21max xIu
21min xIu
21max xCu
21min xCu
Sixty-Bar Space Truss Structure: Case I

41
Rectangle and ellipse containing the data on uncertain parameters and1F 2F
0.67 0.72 0.77 0.82 0.87 0.921.08
1.13
1.18
1.23
F1
F2
21max xIu
21min xIu
21max xCu
21min xCu
Sixty-Bar Space Truss Structure: Case II

42
Case I Case II
Interval analysis method gives tighter bounds of responses than convex modeling method
Convex modeling method gives tighter bounds of responses than interval analysis method
21min 1.6491E-7xIu =
21max 3.0862E-7xIu =
21min 1.6575E-7xCu =
21max 3.0777E-7xCu =
21min 4.5511E-7xIu =
21max 5.9339E-7xIu =
21min 4.4628E-7xCu =
21max 6.0222E-7xCu =
Sixty-Bar Space Truss Structure

43
Natural frequency
( ) 212 23 13 22 13 23 112
,0 33 211 22 12
21mn
C C C C C C CC
C C Cω
ρ − −
= + −
( )( ) 2
12 23 13 22 13 23 1133 22 2
11 22 12
22
2mn
m n
C C C C C C Cp C p
C C CRλ λ − −
= + ≡ −+
The scatter or uncertainty in elastic moduli influence natural frequency and buckling load
Buckling load
Convex Analysis for Vibration and Buckling of Compo site Shells Based on Experimental Data (1)

N° E1 (GPa) E2 (GPa) v21 G12 (GPa)
1 129.20 9.34 0.28 5.23
2 131.59 9.53 0.33 4.97
3 130.6 9.08 0.33 5.16
4 132.01 9.34 0.33 5.15
5 131.04 8.94 0.34 5.15
6 120.61 9.04 0.33 4.81
7 127.69 8.99 0.32 5.11
8 133.65 9.36 0.35 5.08
9 132.19 9.07 0.30 4.85
10 132.00 9.73 0.35 5.00
11 130.39 9.21 0.34 5.34
12 128.28 8.67 0.33 4.98
13 135.30 9.18 0.32 5.13
14 137.33 9.28 0.33 5.25
15 141.69 10.73 0.31 5.47
16 126.91 9.39 0.33 5.65
17 133.75 9.34 0.32 5.33
18 129.24 9.35 0.3244
Convex Analysis for Vibration and Buckling of Compo site Shells Based on Experimental Data (2)
Experimental data of the elastic moduli for T300-QY8911

45
Experimental Data for Elastic Moduli
Smallest ellipsoid
Smallest hyper-rectangular
Bounds on and
Convex Modeling Interval Modeling
,0mnω mnp
Ellipsoidal analysis (EA) Interval analysis (IA)
Comparison
Convex Analysis for Vibration and Buckling of Compo site Shells Based on Experimental Data (3)

46
Case 1: the 10-layer laminated shell, with ply angle being
[ ], , , ,sym
θ θ θ θ θ− − θ ranging from 0o 90o
to
Case 2: the 5-layer laminated shell, with ply angle being
[ ], , , ,θ θ θ θ θ− − θ ranging from 0oto 90o
βThe percentage value defined to quantify the degree of uncertainty of the natural frequency or the critical external pressure of the composite shell as follows
( ) / 2 100%u nlF F Fβ = − ×
where subscripts u, l and n, respectively, denote the upper-bound, lower-bound and the nominal value.
Numerical Examples (1)

47
0 10 20 30 40 50 60 70 80 9065
75
85
95
105
115
125
135
ω11
ω12
ωω ωω (
rad/
sec)
θθθθ (degree)
nominal value lower-bound value of EA upper-bound value of EA lower-bound value of IA upper-bound value of IA
Variability of the fundamental natural frequency for the 10-layer laminated cylindrical shell
Numerical Examples (2)

48
0 10 20 30 40 50 60 70 80 901
4
7
10
13
16
19
ω11
ω12
p cr (
N/m
2 )
θθθθ (degree)
nominal value lower-bound value of EA upper-bound value of EA lower-bound value of IA upper-bound value of IA
(×105)
Variability of the critical external pressure for the 10-layer laminated cylindrical shell
Numerical Examples (3)

49
0 10 20 30 40 50 60 70 80 9034
42
50
58
66
74
ω11
ω12
ωω ωω (
rad/
sec)
θθθθ (degree)
nominal value lower-bound value of EA upper-bound value of EA lower-bound value of IA upper-bound value of IA
Variability of the fundamental natural frequency for the 5-layer laminated cylindrical shell
Numerical Examples (4)

50
0 10 20 30 40 50 60 70 80 901
11
21
31
41
ω13
ω11
ω12
p cr (
N/m
2 )
θθθθ (degree)
nominal value lower-bound value of EA upper-bound value of EA lower-bound value of IA upper-bound value of IA
(×104)
Variability of the critical external pressure for the 5-layer laminated cylindrical shell
Numerical Examples (5)

51
0 10 20 30 40 50 60 70 80 904.9
5.1
5.3
5.5
5.7
5.9
6.1
6.3
ββ ββ ωω ωω
θθθθ (degree)
β for ellipsoidal analysis β for interval analysis
Degree of uncertainty of the fundamental natural frequency for the 10-layerlaminated cylindrical shell
Numerical Examples (6)

52
0 10 20 30 40 50 60 70 80 908.5
9.5
10.5
11.5
12.5
13.5
ββ ββ pcr
θθθθ (degree)
β for ellipsoidal analysis β for interval analysis
Degree of uncertainty of the critical external pressure for the 10-layerlaminated cylindrical shell
Numerical Examples (7)

53
0 10 20 30 40 50 60 70 80 904.6
5.1
5.6
6.1
6.6
ββ ββ ωω ωω
θθθθ (degree)
β for ellipsoidal analysis β for interval analysis
Degree of uncertainty of the fundamental natural frequency for the 5-layerlaminated cylindrical shell
Numerical Examples (8)

54
0 10 20 30 40 50 60 70 80 907.5
8.5
9.5
10.5
11.5
12.5
13.5
14.5
ββ ββ pcr
θθθθ (degree)
β for ellipsoidal analysis β for interval analysis
Degree of uncertainty of the critical external pressure for the 5-layerlaminated cylindrical shell
Numerical Examples (9)

Optimization and
Anti-Optimization
of Structures
under
Uncertainty
55
2010World Scientific & Imperial
College Press

56
Recent Work
Superellipsoid (Mr. Yannis Bekel)
Equation:

57
Most Recent Work
Do We Need the Minimum Volume Figure?
(Mr. Fabien Elettro)
58
Nonclassical Linearization Criteria
in Nonlinear Stochastic Dynamics
1. History
2. General Method
3. Potential Energy Linearization
4. Complementary Energy Linearization
5. Comparison of Two Energy Criteria
6. Mean-Square Equality Criteria

59
History
Equality of the mean-squarebetween nonlinear force and its linear counterpart
Non Classical linearizationcriteria based on energy
T.K. Caughey
1959
C. Wang
X.T. Zhang
1985
1991
X.T. Zhang
I. Elishakoff
R.C. Zhang
2001
I. Elishakoff
Bert
G. Ricchiardi
G. Falsone
2003R.C. Booton
1953
1954
I.E. Kazakov
“ […] replace a given set of nonlinear equations by an equivalent set of linear ones; the difference […] is minimized in some appropriate sense.”, Kozin (1987)
I.Elishakoff
2000
2005
L. Socha

60
)(120 tfXkXkXcXm n
n =+++ +•••
(XC( )XP ( ) =XPeq ( )XCeq =
General Method
Oscillator with polynomial nonlinearity :
)( tfXkXcXm eq =++•••
Energies and equivalent energies :
Oscillator with linearized nonlinearity :
)t
( ) ( )∫= dXtXFXP ,
( )∫ tXF ,
( ) ( ) ( )XPXFXXC −= ( ) =XPeq2
2
1Xkeq
( ) ( ) ( )XPXFXXC eqeqeq −=

61
1st Method - Potential Energy Linearization
( ) ( ) 0}]{[ 2 =− neq XXPXPE
( )( ))(1
14
122
0 n
n
neq XE
XEk
nkk
+
++=
Difference of potential energies in the original and replacing system be orthogonal to nX 2
Leads to equivalent stiffness
( )( )122
0 12
1
2
1 +
++ n
n Xkn
Xk 2
2
1Xk eq

62
( ) ( ) 0}]{[ 2 =− neq XXCXCE
( )( ))(1
124
122
0 n
n
neq XE
XEk
n
nkk
+
+++=
2nd Method - Complementary Energy Linearization
Difference potential energies in the original and replacing system be orthogonal tonX 2
Leads to equivalent stiffness

63
With the assumption of normal distribution for we have,
( )tX
)( 20 XEkkk neq α+=
( )
++
+
++
=ionlinearizatenergy ary complementfor ,
1
1214
ionlinearizatenergy potentialfor ,1
14
n
nn
n
n
α
Comparison of Two Energy Criteria (1)
( ) ( ) nn XEnXE )]([!!12 22 −=
giving
Where
)(tfXkXcXm eq =++•••
)(120 tfXkXkXcXm n
n =+++ +•••
( )( ))(1
124
122
0 n
n
neq XE
XEk
n
nkk
+
+++=

64
Mean-square response of the replacing system : ( )eqkc
SXE
π=2
( ) ( ))/(2
1)/(41
0
202 0
kk
XEkkXE
n
n
αα −+
=
( ) ( ) ( )20
20
20
2 )/(4
1XEkkXEXE nα−≈
Comparison of Two Energy Criteria (2)
( ) 1)/(4 20 0 <<XEkk nα
We approximate as follows :
)(tfXkXcXm eq =++•••
)( 20 XEkkk neq α+=

65
Particular Case: Duffing Oscillator
)( 20XE
1
2
3
(1) Exact solution(2) Potential energy criterion(3) Classical stochastic linearization
)(
)(2
2
0XE
XE
Comparison of the exact solution with the potential energy linearization
( ) ( ) ( ) ( )tFtXtXtX =++•••
3αβ
66
3rd Method - Mean-Square Equality Criteria (1)
( ) ( )][][ 22 XPEXPE eq=
( ) ( )][][ 22 XCEXCE eq=
Mean-square potential energies in the original and the replacing system :
Equality of mean-square complementary potential energies :

67
( )[ ] ( )2
1
2
0
22
2
00 1
+
+= nnnn
eq XEk
kXE
k
kkk γβ
where
( )
( )
+
++
++
=ionlinearizatenergy ary complementfor ,
3!!)34(
112
ionlinearizatenergy potentialfor ,3
!!)34(
1
1
2
2
n
n
n
n
nβ
( )
( )
+
++
++
=ionlinearizatenergy ary complementfor ,
3
!!)12(
1
)12(2
ionlinearizatenergy potentialfor ,3
!!)12(
1
2
n
n
n
n
nγ
3rd Method - Mean-Square Equality Criterias (2)

68
)(
)(2
2
0XE
XE
(a)
(b)
(d)
(c)
)( 20XE
(a) exact solution(b) Equality of mean-squares of potential energies (c) Complementary energy(d) Equality of mean-squares of complementary energies
Contrasts between various energy criteria
Particular Case: Duffing Oscillator

69
� Effectiveness of the energy concepts in the nonlinear stochastic dynamics
� Extension of energy concepts can be performed for the systems with nonlinear
� The applicability of the energy criteria ought to be explored to complex mechanical, civil and aerospace structures
Conclusion
Potential energyMean-squares of potential energiesClassical linearizationComplementary energyMean-squares of complementary energiesac
cura
cy

70
Application and Extension of the
Stochastic Linearization
by Anh and Di Paola
- Anh & Di Paola method
- Atalik & Utku oscillator
- Lutes & Sarkani oscillator
- Mean-Square Equality Criteria

71
Anh & Di Paola method
( ) ( ) ( ) ( )tFtXtXtX =++•••
3αβ
( ) ( ) ( ) ( )tXktXktXktX eqI→→→ 32
51
3α
( ) ( ) ( ) ( )tXktXktXktX eqI→→→ 32
51
3α
vs.
“long shorter way” vs. “short longer way.”
Regulated Gaussian Equivalent Linearization (RGEL)
Anh & Di Paola (1996)
Duffing Oscillator :

72
Atalik & Utku oscillator
( ) ( ) ( ) ( )tFtXtXtX =++•••
3αβ
( ) 2/1/6760.0 dα≈( ) 2/1/5776.0 αd≈2σex
2xσ =
6.14 %
Exact solutionClassical linearization
Anh & Di Paola
?
?
( ) 2/1/6760.0 dα≈( ) 2/1/5776.0 αd≈2σex
2xσ =
Exact solutionClassical linearization

73
Atalik & Utku oscillator
Let us apply the RGEL method proposed by Anh & Di Paola
( ) ( ) ( ) ( )tXktXktXktX eqI→→→ 32
51
3α
( ) ( ) ( ) ( ) ( )tFtXtXEtXtX =++•••
][3
7 2αβ
( )tXE ][9 2
α→3
7α9
7α( )tXE ][ 2
Orthogonalization process

74
Atalik & Utku oscillator
( ) ( ) ( ) ( )tFtXtXtX =++•••
3αβ
( ) 2/1/6760.0 dα≈ ( ) 2/1/5776.0 αd≈2σex
2xσ =
6.14 %
Exact solution Conventional linearization
Anh & Di Paola
( ) 2/1/ dα2xσ = 0.6546
≈
%17.3Vs.

75
Lutes & Sarkani oscillator
( ) ( ) ( )tFtXtXktX a =+•
)](sgn[
2,exactXσ 2
,approxXclassicalσ ( ) Iregulated tXE ][ 2a Error, % Error, %
1 1 1 0 1 0
2 0.7765 0.7323 5.6877 0.7824 0.7713
3 0.6760 0.5774 14.5904 0.6547 3.1546
4 0.6175 0.4764 22.8490 0.5620 8.9861
5 0.5786 0.4055 29.9225 0.4917 15.0206
6 0.5505 0.3529 35.8981 0.4367 20.6846
7 0.5291 0.3124 40.9630 0.3925 25.8224
( ) ( ) ( ) ( )tXktXktXktXk eqaaa →→→ −
212
1
One-Step Regulation
7 times less
2 times less
15% less

76
Lutes & Sarkani oscillator – Two-Step Regulation
( ) ( ) ( ) ( ) ( ) ( )tXktXktXktXktXktXk IIeqaaaaa
,412
313
212
1 →→→→→ −−−
2,exactXσ 2
,approxXclassicalσ ( ) IIregulated tXE ][ 2
a Error, % Error, %
1 1 1 0 1 0
2 0.7765 0.7824 0.7713 0.8205 5.6693
3 0.6760 0.6547 3.1546 0.7117 5.2820
4 0.6175 0.5620 8.9861 0.6251 1.2229
5 0.5786 0.4917 15.0206 0.5554 4.0131
6 0.5505 0.4367 20.6846 0.4988 9.4038
7 0.5291 0.3925 25.8224 0.4521 14.5548
18 times
Two-Step Regulation = Optimal

77
Conlusion
�Two-step regulation provides an additional improvement. For a=4:
•Classical linearization : 23%•Single-step regulation : 9%•Two-step regulation : 1.23%
�For larger values of a, still much better than the classical or single-step regulation linearization. For a=7:
•Classical linearization : 41%•Single-step regulation : 26%•Two-step regulation : 14.6%
�The method has a large potential and it ought be explored to the wider classes of oscillators

78
Conclusions � The type of the analytical treatment that should be adopted for non-
probabilistic analysis of uncertainty depends upon the available experimental data.
� If V1 is smaller than V2, then one has to prefer interval analysis
� If V1 is in excess of V2, then the analyst ought to utilize convex modeling
� If V1 equals V2 or these two quantities are in close vicinity, then two approaches can be utilized with nearly equal validity
V1 is the minimum volume hyper-rectangle that contains all experimental data
V1 is the minimum volume ellipsoid that contains all experimental data
� The type of the analysis of uncertainty depends on the type and
amount of available information.

79
Conclusions� This study proposes a complete framework for uncertainty analysis in
structures with uncertain parameters. Remarkably, it makes bothellipsoidal modeling and interval analysis as practical tools.
« I am familiar with forty-two different impressions left by tires »
Sherlock Holmes

80

81

82

83

8484

8585

8686

8787

8888

8989

9090

9191

9292

9393

9494

9595

9696

9797

9898

9999

100100

101101

102102


104104
Charles
Pierre
Baudelaire
(1821 - 1867)

105105
I see better things, and approve,
but I follow worse. VII, 20.

106106
But, since the affairs of men rests still incertain,
Let’s reason with the worst that may befall.

107107
Determinism, like the Queen of England,
reigns -- but does not govern.
Michael Berry

108
I would be pleased to try to
answer your questions
![Great Barrier Reef. Images available atwebhost.bridgew.edu/c2king/CH241/Lec3A_Ch6_Chem... · 6 Equilibrium Expressions for Heterogeneous Reactions Keq = 1 x [CO 2] 1 Keq for the reaction](https://static.fdocuments.us/doc/165x107/5f61a655311f0f14357e0c54/great-barrier-reef-images-available-6-equilibrium-expressions-for-heterogeneous.jpg)

![Improved stochastic linearization method using …barbat.rmee.upc.edu/papers/[17] Hurtado, Barbat, 1996.pdf · A new procedure for the random vibration analysis of hysteretic structures](https://static.fdocuments.us/doc/165x107/5b79d3287f8b9a332d8e7a0c/improved-stochastic-linearization-method-using-17-hurtado-barbat-1996pdf.jpg)






![Calculating Keq - mskropac.weebly.com · Using Molar Concentration Remember: So if we can determine molar concentrations we can determine Keq Keq = [C]c[D]d [A]a[B]b C n V Saturday,](https://static.fdocuments.us/doc/165x107/5c9ce2dd88c99388348bc536/calculating-keq-using-molar-concentration-remember-so-if-we-can-determine.jpg)








