
Read: Chapter CONTENTS - Texas A&M...
27
JN Reddy The Finite Element Method Read: Chapter 6 1D Eigenvalue and Time-Dependent Problems • Eigenvalue problems Structural problems Heat transfer-like problems • Transient problems Semi-discretization Time approximations Mass lumping Stability and accuracy Numerical examples CONTENTS
Transcript of Read: Chapter CONTENTS - Texas A&M...

JN Reddy
The Finite Element Method
Read: Chapter 6
1D Eigenvalue and Time-Dependent Problems
• Eigenvalue problems Structural problems Heat transfer-like problems
• Transient problems Semi-discretization Time approximations Mass lumping Stability and accuracy Numerical examples
CONTENTS

JN Reddy
INTRODUCTION
Equations of motion
Static problem (set all derivatives with respect to time
t to zero)
Construct FE model
Construct weak form
Semidiscretization(construct weak form in spatial
coordinates and semi-discrete FEM)
Full discretization (use time
approximations)
Eigenvalue problem (replace the solution with periodic or decaytype solution with respect to time t)
Construct FE model
Construct weak form

JN Reddy
INTRODUCTION (continued)
( )f x
Equilibrium configuration
• • • • • • • •1 2 3
4 56 7 8
3u
( , )f x t
Transient configurations
3 1( )u t
• • • • • • • •
2time,t
1time,t
3time,t
3
3 2( )u t 3 3( )u t
r
0 0
( , )
B.C. : (0, ) 0, ( , ) 0
I.C. : ( , 0) ( ), ( , 0) ( )
u uT f x t
t t x xu t u L t
u x u x u x v x
æ ö æ ö¶ ¶ ¶ ¶ç ÷ ç ÷- =ç ÷ ç ÷ç ÷ ç ÷ç ÷ ç ÷¶ ¶ ¶ ¶è ø è ø= == =
( )
(0) 0, ( ) 0
d duT f x
dx dxu u L
æ öç ÷- =ç ÷ç ÷è ø= =
Eigenvalue and Dynamics Problems : 3
Equilibrium (static) problem
Transient problem
Equation of equilibrium Equation of motion

JN Reddy Eigenvalue and Dynamics Problems : 4
EIGENVALUE PROBLEMS
w
w
r
r w
0
2 00
( , )
For periodic motion, set ( , ) ( )e
e ( ) ( ) 0
i t
i t
u uA EA f x t
t t x x
u x t u x
dudA i u x EA
dx dx
æ ö æ ö¶ ¶ ¶ ¶ç ÷ ç ÷- =ç ÷ ç ÷ç ÷ ç ÷ç ÷ ç ÷¶ ¶ ¶ ¶è ø è ø
=ì üæ öï ïç ÷ï ïç ÷- =í ýç ÷ï ïç ÷è øï ïî þ
2 00
200
( ) 0
( ) 0,
dudA u x EA
dx dxdud
A u x EAdx dx
r w
r l l w
æ öç ÷- - =ç ÷ç ÷è øæ öç ÷- - = =ç ÷ç ÷è ø
Natural vibration of barsGoverning Equation for transient response
Natural vibration

JN Reddy Eigenvalue and Dynamics Problems : 5
t
t
g T x t T x
T TA kAt x x
dTdA T x kA
dx dx
0
00
0, ( , ) ( )e
0
e ( ) ( ) 0
l
l
r
r l
-
-
= =
æ ö¶ ¶ ¶ç ÷- =ç ÷ç ÷è ø¶ ¶ ¶ì üæ öï ïï ïç ÷- - =í ýç ÷ç ÷è øï ïï ïî þ
T TA kA g x tt x x
( , )ræ ö¶ ¶ ¶ç ÷- =ç ÷ç ÷è ø¶ ¶ ¶
Governing equation for transient response
00( ) 0
dTdA T x kA
dx dxr l
æ öç ÷- - =ç ÷ç ÷è ø
Governing equation for eigenvalue analysis: for decay type solution, set
EIGENVALUE PROBLEMS Heat transfer-like problems
Transient configurations
• • • • • • • •
t2time,
t1time,t3time,

JN Reddy
FE MODELS OF EIGENVALUE PROBLEMS
01
( ) ( ) ( )
,b b
a a
n
h j jj
e e e e e
x xje ei
ij ij i jx x
u x u x u x
ddK EA dx M A dx
dx dx
y
l
yyr y y
=
» =
- =
= =
å
ò ò
K u M u Q
FE Model
Weak Form
1 2
1 2
0 ( )
( ) ( ) ( )
,
b
a
b
a
a b
xh
i hx
xi h
i h i a i bx
h h
x x
dudw A u x EA dx
dx dx
dw duA w u x EA dx w x Q w x Q
dx dxdu du
Q EA Q EAdx dx
r l
r l
ì üæ öï ïï ïç ÷=- +í ýç ÷ç ÷è øï ïï ïî þæ öç ÷= - + - -ç ÷ç ÷è ø
æ ö æ öç ÷ ç ÷=- =ç ÷ ç ÷ç ÷ ç ÷è ø è ø
ò
ò
Eigenvalue and Dynamics Problems : 6
Eigenvalue problem

JN Reddy
Linear element
[Ke] =aehe
1 −1−1 1
[Me] =ce0he6
2 11 2
Quadratic element
[Ke] =ae3he
⎡⎣ 7 −8 1−8 16 −81 −8 7
⎤⎦+[Me] =
ce0he30
⎡⎣ 4 2 −12 16 2−1 2 4
⎤⎦
Explicit form of the matrices involved
12
3x he
(b)
3e
bx x=ex2
1e
ax x=x
1 2x he
(a)
3e
bx x=
1e
ax x=x
Eigenvalue and Dynamics Problems : 7

JN Reddy
EXAMPLES: Axial vibrations of a bar (fundamental frequency)
Deformable bar
Problem 1
x
E, A k
L Deformable bar
Linear springProblem 2
1 1
2 2
1
2
21 1 2 161 1 1 2
u uEA ALu uL
wrì ü ì üé ù é ù- ï ï ï ïï ï ï ïê ú ê ú-í ý í ýê ú ê úï ï ï ï-ë û ë ûï ï ï ïî þ î þ
ì üï ïï ï= í ýï ïï ïî þ
0 0
0
22 2
2 306
orEA AL EuL L
rw w
ræ ö÷ç - = =÷ç ÷çè ø
1 1
2 2
1
2
21 1 2 161 1 1 2
u uEA ALu uL
wrì ü ì üé ù é ù- ï ï ï ïï ï ï ïê ú ê ú-í ý í ýê ú ê úï ï ï ï-ë û ë ûï ï ï ïî þ î þ
ì üï ïï ï= í ýï ïï ïî þ
0 0
2ku-
22
2
03
3( / A)or
EA ALk uL
E kLL
rw
wr
æ ö÷ç + - =÷ç ÷çè ø
+=
Eigenvalue and Dynamics Problems : 8

JN Reddy
TRANSIENT ANALYSIS(steps involved)
2 2 2
1 2 02 2 2 ( , )u u u uc c a b c u f x tt t x x x x
æ öæ ö¶ ¶ ¶ ¶ ¶ ¶ ÷ç÷ç ÷+ - + + =÷ çç ÷÷ç ç ÷çè ø¶ ¶ ¶ ¶ ¶ ¶è ø
Model Equation
Approximate solution
1
( , ) ( , ) ( ) ( )n
h j jj
u x t u x t t xϕΔ=
» =å1. Spatial approximation (semidiscretization)
2. Time approximation (full discretization)
Δ Δ Δ+ + =C M K F
1 , 1K̂ Fs s sΔ + +=
Eigenvalue and Dynamics Problems : 9

JN Reddy
SPATIAL APPROXIMATION
2 2 2
1 2 02 2 2 ( , )u u u uc c a b c u f x tt t x x x x
æ öæ ö¶ ¶ ¶ ¶ ¶ ¶ ÷ç÷ç ÷+ - + + =÷ çç ÷÷ç ç ÷çè ø¶ ¶ ¶ ¶ ¶ ¶è ø
2 2
1 2 02 2 2
2 2 2
1 2 02 2 2
0 ( ) ( , )
( , )
b
a
b
a
xh h h h
i hx
xh h i h i h
i i i h ix
i
u u u uw x c c a b c u f x t dxt t x x x x
u u dw u d w uc w c w a b c w u w f x t dxt t dx x dx x
w
é ùæ ö æ ö¶ ¶ ¶ ¶¶ ¶÷ ÷ç çê ú= + - + + -÷ ÷ç ç÷ ÷ç çê úè ø è ø¶ ¶ ¶ ¶ ¶ ¶ë û
é ùæ öæ ö¶ ¶ ¶ ¶ ÷ç÷ê úç ÷= + + + + -÷ çç ÷÷ê úçç ÷çè ø¶ ¶ ¶ ¶è øë û
-
ò
ò
1 3 2 4( ) ( )a b
i ia i b
x x
dw dwx Q w x Q Q Qdx dx
æ ö æ ö÷ ÷ç ç- - - - -÷ ÷ç ç÷ ÷ç çè ø è ø
Model Equation
Weak Form for semi-discretization
Eigenvalue and Dynamics Problems : 10

JN Reddy
Approximation
Finite element model
1 2
22
02 2
1 3 2 4
,
( ) ( )
b b
a a
b
a
b
aa b
x xe eij i j ij i jx x
x j je i iij i jx
xe i ii i i a i bx
x x
C c dx M c dx
d dd dK b a c dxdx dx dx dx
d dF f dx x Q x Q Q Qdx dx
jj jj
j jj jjj
j jj j j
Δ Δ Δ+ + == =
æ ö÷ç ÷ç= + + ÷ç ÷ç ÷çè øæ ö æ ö÷ ÷ç ç÷ ÷= + + + - + -ç ç÷ ÷ç ç÷ ÷ç çè ø è ø
ò ò
ò
ò
C M K F
SPATIAL DISCRETIZATIONFinite Element Model
1
( , ) ( , ) ( ) ( )n
h j jj
u x t u x t t xjΔ=
» =å
Eigenvalue and Dynamics Problems : 11

JN Reddy
PARABOLIC EQUATION (heat transfer, fluid mechanics, and like problems
1 0
1 2
,
( ) ( )
yyyy yy
y y y
+ =
æ ö÷ç ÷= = +ç ÷ç ÷çè ø
= + +
ò ò
ò
Cu Ku F
b b
a a
b
a
x x je e iij i j ij i jx x
xe
i i i a i bx
ddC c dx K a c dxdx dx
F f dx x Q x Q
TIME APPROXIMATIONS
HYPERBOLIC EQUATION (structural mechanics problems)
C M K FΔ Δ Δ+ + =
Eigenvalue and Dynamics Problems : 12

JN Reddy
TIME APPROXIMATIONS OF PARABOLIC EQUATIONS
D
D
1
1
11
1
, forward difference
, backward difference
s sj js
js
s sj js
js
u uu
t
u uu
t
+
++
+
+
-»
-»
Approximation of thefirst derivative
a a a
a a
D
D
11
1
1 11
(1 ) , 0 1
(1 )
s sj js s
j js
s s s sj j s j j
u uu u
t
u u t u u
++
+
+ ++
-+ - » £ £
é ù= + + -ê úë û
Alfa (α)-family of approximation
Eigenvalue and Dynamics Problems : 13
11( )s
j j su u t--=
( )sj j su u t=
11( )s
j j su u t++=
stD
1sju+
0s =1s =
2s = 1s - s 1s +
( )ju t
t
•
• •
sju

JN Reddy
TIME APPROXIMATIONS (Parabolic)
Cu Ku F Cu K u F Cu K u F
u u u u
Cu Cu Cu Cu
s s s ss s s s
s s s ss
s s s ss
t T
t
t
a a
a a
D
D
1 11 1
1 11
1 11
, 0 ,
(1 )
(1 )
+ ++ +
+ ++
+ ++
+ = < < + = + =
é ù= + + -ê úë ûé ù= + + -ê úë û
Alfa-family of approximation (Parabolic equation)
Cu F K us s ss
1 1 11 + + +
+= -
( ) ( ) C K u C K u
F F
s ss s s s
s ss
t t
t
a a
a a
D D
D
11 1
11
(1 )
(1 )
++ +
++
+ = - -
é ù+ + -ê úë û1 1
1
1 1 1
1 11 1 1
ˆ ˆ
ˆ ,
ˆ (1 ) (1 )
s ss
s s s
s s s ss s s
where
t
t t
a
a a a
D
D D
+ ++
+ + +
+ ++ + +
=
= +
é ù é ù= - + + + -ê ú ê úë û ë û
K u F
K K C
F K C u F F
Cu F K us s ss = -
Eigenvalue and Dynamics Problems : 14

JN Reddy
C u M u K u Fe e e e e e e+ + =
( )u u u u
u u u u u u
s s s s
s s s s s s
t t
t
g
a q q q
D D
D
21 ,12
1 , , 1, (1 )
+
+ +
= + +
= + º - +
Semidiscrete FE model
Newmark scheme (hyperbolic equations)
( ) ( )
K u F , K K M C
F F M u u u C u u u
s ss s s s s
s s s s s s s ss s
a a
a a a a a a
1 11 1 1 3 1 5 1
1 11 3 4 5 1 5 6 7
ˆ ˆ ˆ
ˆ
+ ++ + + + +
+ ++ +
= = + +
= + + + + + +
Fully discretized model
TIME APPROXIMATIONS (Hyperbolic)
Eigenvalue and Dynamics Problems : 15

JN Reddy
General form of the time-marching scheme
The scheme is called explicit if the coefficient matrix is diagonal (and hence, no inversion of equations is necessary); otherwise, the scheme is said to be implicit.
s+1K u F
K K C F K C u F FD D D
1 1
1 1 11 1 1 1 1
ˆ
ˆ ˆ, (1 ) (1 )
s s
s s s s ss s s s st t ta a a a
+ +
+ + ++ + + + +
=
é ù é ù= + = - + + + -ê ú ê úë û ë û
The alfa-family scheme is explicit if and only ifC(1) 0 and (2) is diagonal .a =
Ku Bu F1 , 1ˆ s s s s+ += +
Eigenvalue and Dynamics Problems : 16
K̂
EXPLICIT AND IMPLICIT FORMULATIONS

JN Reddy
ROW-SUM MASS LUMPING
Eigenvalue and Dynamics Problems : 17
For the Lagrange linear and quadratic elements we have
[Me]C =ρhe6
2 11 2
, [Me]C =ρhe30
⎡⎣ 4 2 −12 16 2−1 2 4
⎤⎦
[Me]L =ρhe2
1 00 1
, [Me]L =ρhe6
⎡⎣ 1 0 00 4 00 0 1
⎤⎦
6e eA hr
2e eA hr
6e eA hr
30e eA hr

JN Reddy
STABILITY OF APPROXIMATIONS
K u Ku F
u Au B
1 1 , 1
1 , 1
ˆ s s s s s
s s s s
+ + +
+ +
= +
= +
The scheme is called stable if the repeated solution of the above equation does not result in unbounded solution us+1. The necessary and sufficient condition for the above scheme to be stable is that the maximum eigenvalue of the coefficient matrix A is less than unity:
max 1Al £
Eigenvalue and Dynamics Problems : 18

JN Reddy
STABILITY OF APPROXIMATIONS (continued)
( )
( )
D D
12
12
critmax
, the scheme is
, the scheme is
2Stability condition:
(1 2 )
0.0, Forward difference Euler scheme (conditionally stable)
0.5, Crank-Nicolson's scheme (stabl
stable
conditionally stable
t t
a
a
a l
a
a
³
<
£ =-
=
= e)
2, Galerkin's scheme (stable)
31.0, Backward difference scheme (stable)
a
a
=
=
Alfa-family of approximation scheme
Eigenvalue and Dynamics Problems : 19
( )- C K u 0+ =l

JN Reddy
STABILITY OF APPROXIMATIONS (continued)
( )D Dcrit
max
13
2Stability condition:
( )
0.5, 2 0.5, Constant-average acceleration scheme (stable)
0.5, 2 , Linear acceleration scheme (conditionally stable)
1.5, 2 1.6, Galerkin's scheme (stab
t ta g l
a g b
a g b
a g b
£ =-
= = =
= = =
= = = le)
1.5, 2 2.0, Backward difference scheme (stable)a g b= = =
Newmark’s scheme for Structural Dynamics
gets smaller as the mesh is refined.( )crittD
Eigenvalue and Dynamics Problems : 20
( )- M K u 0+ =l

JN Reddy
0.0 1.0 2.0 3.0 4.0 5.0 6.0
Time, t
-2.50
-2.00
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
2.00
Tem
pera
ture
,u(
1,t)
1 linear element (α = 0.0, Δt = 0.675)
2 linear elements (α = 0.0, Δt = 0.065)
2 linear elements (α = 0.5, Δt = 0.065)
NUMERICAL EXAMPLES
Heat transfer in a rod
2
2 0, 0 1
(0, ) 0, (1, ) 0
( , 0) 1
u ux
t xu
u t tx
u x
¶ ¶- = < <¶ ¶
¶= =¶=
2 / 3 0.66667
2 / 31.689 0.063
one-element model:
two-element model: crit
crit
t
t
Δ = =
Δ = =
Eigenvalue and Dynamics Problems : 21

JN Reddy
NUMERICAL EXAMPLES (continued)
Bending of a clamped beam
p p
2 4
2 4 0, 0 1
(0, ) 0, (0, ) 0,
(1, ) 0, (1, ) 0
( , 0) sin (1 )
w wx
t xw
w t txw
w t tx
w x x x x
¶ ¶+ = < <
¶ ¶¶= =¶¶= =¶
= - -
12 / 516.930.023214
0.00897
one-element model:
two-element model:
Δ ==
Δ =
crit
crit
t
tEigenvalue and Dynamics Problems : 22
w(0
.5,t)
0.0 0.5 1.0 1.5 2.0
Time, t
-2.00
-1.50
-1.00
-0.50
0.00
0.50
1.00
Def
lect
ion,
175.0=Δt15.0=Δt
175.0=Δt
α = 0.5
(γ = 0.5)
(γ = 1/3)05.0=Δt
C.S.

JN Reddy
NUMERICAL EXAMPLES (continued)
Eigenvalue and Dynamics Problems : 23
0.0 0.1 0.2 0.3 0.4 0.5
Time, t
-0.20
-0.10
0.00
0.10
0.20
Def
lect
ion,
2 elements1 element
Δt = 0.005
w(0
.5, t
)w(0.5, t)●

JN Reddy 24
STRUCTURAL STABILITY (Buckling)
L x
P
z
Beam-column
P
L
Governing Equation2 2
2 2
2
20d d w d wEI P
dx dx dx
+ =
Weak Form over an Element2 2
2 2
2 2
2 2
1 3 2 4
0
( ) ( )
b
a
b
a
a b
x
x
x
x
a b
x x
d d d dwv EI dxdx dx dx dxd v d dv
P
dwEI dxdx dx dx dx
dv dvv x Q v x Q Q Qdx dx
w
w P
= +
= −
− − − − − −
Finite Element Model
( )e e e eP− =K G Δ Q

JN Reddy 2-D Problems: 25
STRUCTURAL STABILITY (continued)
( )e e e eP− =K G Δ Q2 2
2 2,b
a
b
a
x i jeij x
x i jeij x
d dK EI dxdx dx
d dG dxdx dx
j j
j j
=
=
1 2ee21 Δ≡θ ee
42 Δ≡θ
eew 11 Δ≡ eew 32 Δ≡
eh
ee q,Q 22 ee q,Q 44
ee q,Q 11ee q,Q 33
1 2ee21 Δ≡θ
eh
For element-wise constant values of EeIe and qe:
[Ke] =2EeIeh3e
⎡⎢⎣6 −3he −6 −3he−3he 2h2e 3he h2e−6 3he 6 3he−3he h2e 3he 2h2e
⎤⎥⎦2 2
2 2
36 3 36 33 4 336 3 36 303 3 4
13
e e
e e e e
e
e e
e
e
e e e
h hh h h h
h hh h h h
h
− − − −
− −
=
−
G
JN Reddy 26
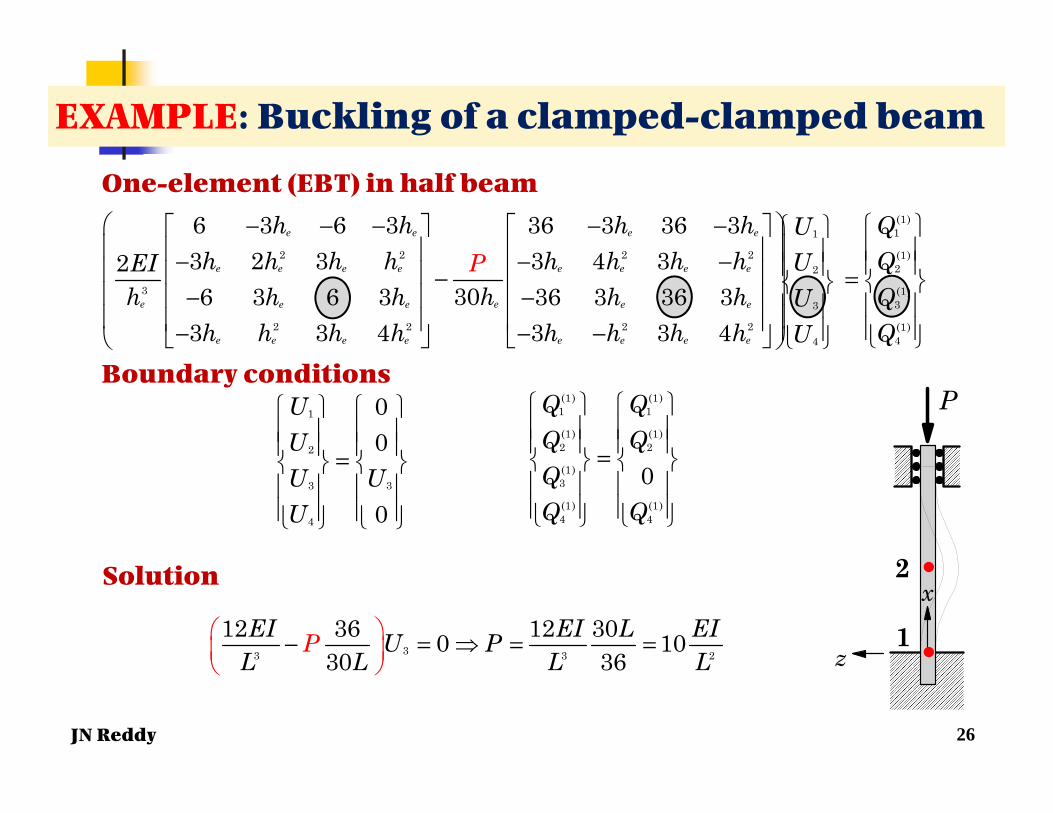
EXAMPLE: Buckling of a clamped-clamped beam
2 2 2 2
2 2 2
3
2
6 3 6 3 36 3 36 33 2 3 3 4 326 3 6 3 36 3 36 3
3 4 33
3 40
3
e e e e
e e e e e e e e
e e e e
e e e e e e e e
e e
h h h hh h h h h h h hEI
h h h hh h h h h h
hh
P
hh
− − − − − − − − − − − − − −
1
2
3
4
UUUU
(1)1
(1)2
(1)3
(1)4
QQQQ
=
1
2
3 3
4
00
0
UUU UU
=
(1) (1)1 1
(1) (1)2 2
(1)3
(1) (1)4 4
0
Q QQ QQQ Q
=
33 3 2
12 36 12 300 1030 36
EI EI L EIU PL L L L
P =
− = =
One-element (EBT) in half beam
Boundary conditions
Solution x
z
P
●
●
1
2

JN Reddy
SUMMARY
In this lecture the following topics were covered:
Transient and eigenvalue problems and their finite element formulations
Time-approximations of first-order andsecond-order equations
Explicit and implicit schemes, mass lumping, as well as stability of the schemes
Numerical examples to illustrate tostability and accuracy.
Buckling of beams
Eigenvalue and Dynamics Problems : 27


















