
RDS-CAA Qualification and Programming Primer RDS-CAA Primer1.
date post
19-Dec-2015Category
view
226download
0
Robotic Delivery System with SLAM
Blakely BoydKyle Elmer
Phillip Faber
Project Advisors: Dr. Aleksander Malinowski
Dr. In Soo Ahn
RDS with SLAM
Outline
• Introduction• Project Overview• Project Progress• Sensors• Wi-Fi
• Questions

RDS with SLAM
Introduction
• Autonomous Delivery System• Uses existing Wi-Fi Access Points• Works from any laptop

RDS with SLAM
Project Goals
• Wi-Fi signal strength acquisition• Robotic obstacle avoidance• Localization and mapping• Best path algorithm

RDS with SLAM
System Platform
• Pioneer p3dx• Laptop interface

RDS with SLAM
System Diagram
User’s PC Robot PCUser Position and Request
Robot
Wireless Access Points
Signal Strengths and MAC Address
Navigation Commands (Motor Control Speeds)Wireless
Wired
IR Sensors
A/D Converter

RDS with SLAM
Project Progress

RDS with SLAM
Project Division
• Phillip Faber• Sonar and IR testing/interfacing
• Kyle Elmer• Wi-Fi Data Filtering• Obstacle Avoidance
• Blakely Boyd• Wi-Fi Navigation

RDS with SLAM
Navigation
• Obstacle Avoidance • Initial Mapping • Best Path Algorithm
[1]

RDS with SLAM
Sonar Sensors
0 50 100 150 200 250 3000
1000
2000
3000
4000
5000
6000
90 sensor 50 sensor 30 sensor
Samples
Distance

RDS with SLAM
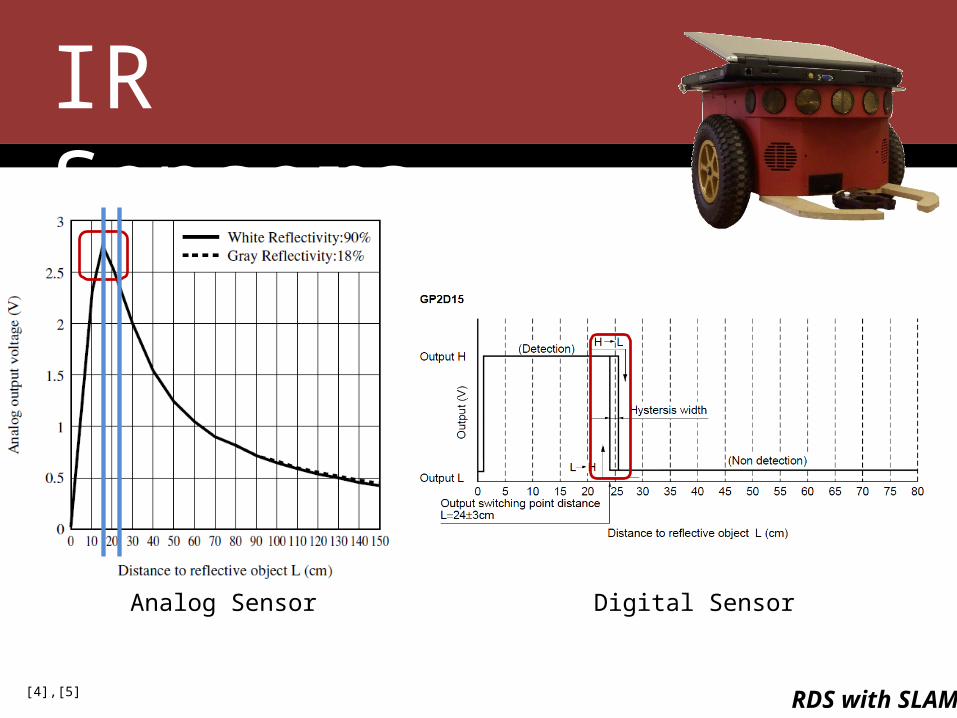
IR Sensors
• Sharp GP2Y0A02YK0F• 20cm to 150cm
• Sharp GP2D15• 24cm
[6],[7]
RDS with SLAM
IR Sensors
[4],[5]
Analog Sensor Digital Sensor
RDS with SLAM
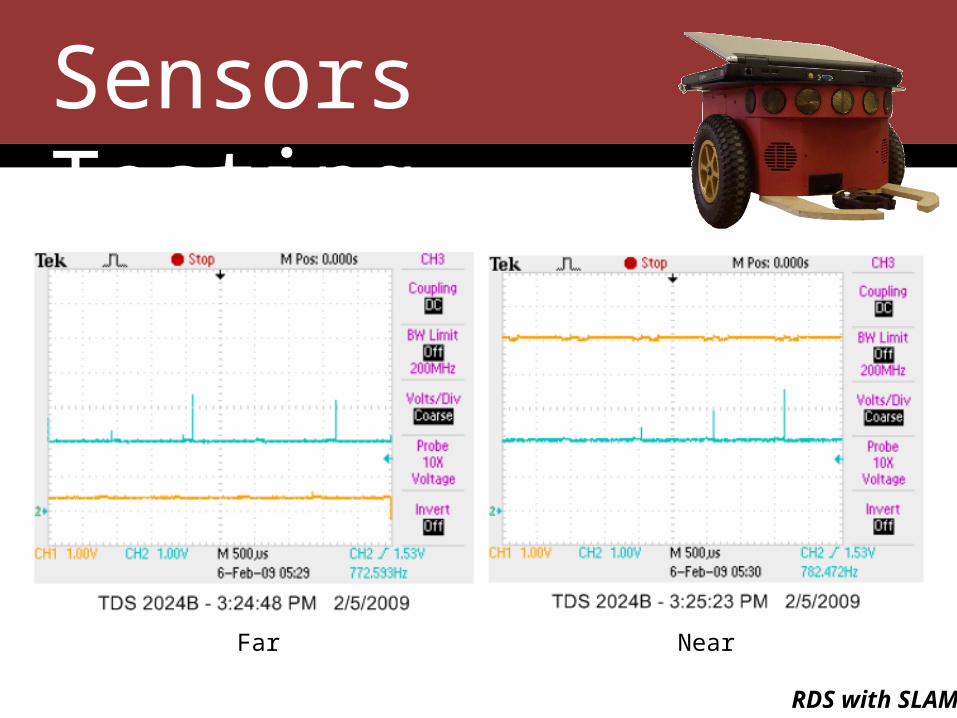
Sensors Testing
Far Near

RDS with SLAM
Interfacing
• Pico Tech USB ADC-11/10• Pros
• USB• Open Source
• Sensor Class in Aria• 11 channel/10 bit
• Cons • From the UK
[8]

100 200 300 400 500 600 700 800 900 100055
60
65
70
75
80
85
90
95
100
105
RAW
AVG
MED
Samples
Sig
nal Q
ualit
y
RDS with SLAM
Wi-Fi Sampling
Averaging: 200 samplesMedian: 201 samples
• Averaging and Median filter react the same• Both techniques smooth the data efficiently

RDS with SLAM
Wi-Fi Sampling
Averaging: 200 samplesMedian: 105 samples
• Averaging provides smoother transitions• Median filter jumps too much
0 200 400 600 800 1000 1200 140060
65
70
75
80
85
90
95
100
105
RAWAVG(200)MED(105)
Samples
Sig
nal Q
ualit
y
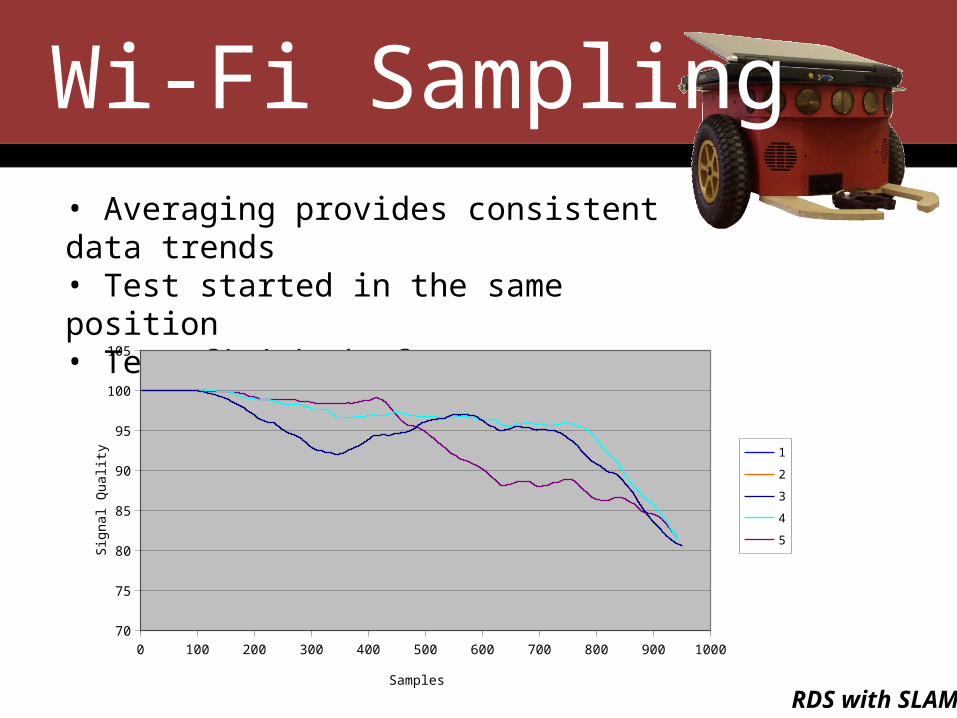
Wi-Fi Sampling• Averaging provides consistent data trends• Test started in the same position• Test finished after 10 meters
0 100 200 300 400 500 600 700 800 900 100070
75
80
85
90
95
100
105
1
2
3
4
5
Samples
Sig
nal Q
ualit
y
RDS with SLAM

RDS with SLAM
Wi-Fi Sampling• What about update time?• Stopped around 900th sample• Took ~80 samples to get within a reasonable range
0 200 400 600 800 1000 1200 1400
65
70
75
80
85
90
95
100
105
RAW
AVG
Samples
Sig
na
l Qu
alit
y
RDS with SLAM
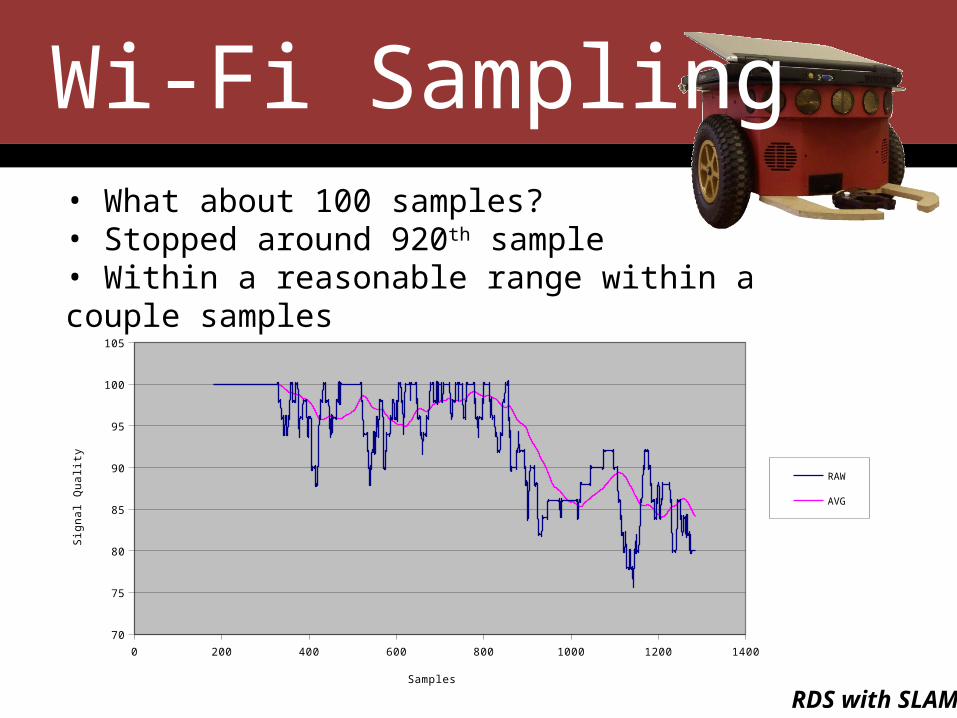
Wi-Fi Sampling• What about 100 samples?• Stopped around 920th sample• Within a reasonable range within a couple samples
0 200 400 600 800 1000 1200 1400
70
75
80
85
90
95
100
105
RAW
AVG
Samples
Sig
nal Q
ualit
y

RDS with SLAM
Wi-Fi Navigation
•Prototype navigation•Send signal strengths•Receive/compare data•Control robot•Evaluate closeness

RDS with SLAM
Wi-Fi Navigation
•Closeness calculations•E = ∑|Rn – Dn|•E = ∑|Rn
2 – Dn2|
•E = ∑wn * |Rn – Dn|

RDS with SLAM
Wi-Fi Navigation
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 200
10
20
30
40
50
60
70
80
90
100
Total Weighted Error
Robot Movements
Total Error in Link Qual-ity
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 200
5
10
15
20
25
30
35
40
Individual Weighted Error
Robot Movements
Total Error in Link Qual-ity

RDS with SLAM
Wi-Fi Navigation
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 310
20
40
60
80
100
120
140
Total Weighted Error
Robot Movements
Total Error in Link Quality
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 310
5
10
15
20
25
30
35
40
45
Individual Weighted Error
Robot Movements
Total Error in Link Quality
RDS with SLAM
Wi-Fi Navigation
•Improving accuracy•Time-based weights•Discarding erratic data•Updating destination data

RDS with SLAM
Hardware
Part Number Description Quanity Part Price Total
Have Pioneer 3pdx Robotic Platform 1 $0.00 $0.00
Dell Laptop Project Computer 1 $0.00 $0.00
GP2Y0A02YK0F Analog Sensors 8 $12.50 $100.00
GP2D15 Digital Sensors 8 $12.50 $100.00
Want USB ADC-11/10 USB Sensor Interface 1 $262.35 $262.35
Total 18 $462.35

RDS with SLAM
Website
RDS with SLAM
References
[1] Nourbakhsh, Illah R., and Roland Siegwart. Introduction to Autonomous Mobile Robots (Intelligent Robotics and Autonomous Agents.) London: The MIT Press, 2004 .
[2] Serrano, Oscar, Jose Marıa, Canas Vicente Matellan, andLuis Rodero. Universidad Rey Juan Carlos, 28933 Mostoles (Spain): 4 Dec. 2008<http://gsyc.es/jmplaza/papers/waf04.pdf>
[3] Lim, Chin-Heng, Yahong Wan, Boon-Poh Ng, and Chong-Meng Samson See. "A Real-Time Indoor WiFi Localization System Utilizing Smart Antennas." IEEE Transactions on Consumer Electronics 53 (2007): 618-622. 4 Dec. 2008 <http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=04266950>.

RDS with SLAM
References
[4] Sharp, GP2Y0A02YK0F Datasheet Jan. 2009<http://www.acroname.com/robotics/parts/gp2y0a02_e.pdf>
[5]Sharp, GP2D12-15 Datasheet Jan. 2009 <http://www.acroname.com/robotics/parts/SharpGP2D12-15.pdf>
[6] Sharp, GP2D15 Jan. 2009<http://www.acroname.com/robotics/parts/R49-IR15.jpg>
[7] Sharp GP2Y0A02YK Jan. 2009<http://www.acroname.com/robotics/parts/R144-GP2Y0A02YK.jpg>
[8] ADC USB 11/10 Jan. 2009<http://images.picotech.com/adc11.jpg>

Questions?













![RDS 323 Restorative Dental Sciences [ RDS]](https://static.fdocuments.us/doc/165x107/6235ee36aafa9c66c73cc0cf/rds-323-restorative-dental-sciences-rds.jpg)




