Ranging
1
Ranging Without Time Stamps Exchanging Mohammad Reza Gholami, Satyam Dwivedi, Magnus Jansson, and Peter H¨ andel ACCESS Linnaeus Centre, Department of Signal Processing, KTH–Royal Institute of Technology, Stockholm, Sweden Abstract We investigate the range estimate between two wireless nodes without time stamps exchanging. Considering practical aspects of oscillator clocks, we propose a new model for ranging in which the measurement errors include the sum of two distributions, namely, uniform and Gaussian. We then derive an approximate maximum likelihood estimator (AMLE), which poses a difficult global optimization problem. To avoid the difficulty in solving the complex AMLE, we propose a simple estimator based on the method of moments. Numerical results show a promising performance for the proposed technique. Introduction • Wireless sensor networks: a significant growing technology in different areas • Ranging based on (two-way time-of-arrival) TW-TOA by exchanging the time stamps • Ranging based on TW-TOA is severely affected by an imperfect clock • Affine function to model the local clock, parameterized by clock offset and clock skew, the distance estimate between two nodes is mainly affected by an imperfect clock skew • In this study: no continuous clock reading, no communication during ranging System Model • TW-TOA between a master node equipped with a time-to-digital convertor (TDC) and a slave node • The clock of the slave node: C s ( t )= θ 0 + wt , clock offset θ 0 , clock skew w = 1 + ρ • The relation between the clock skew and the oscillator frequency offset: f s = f o ± ∆ f + ξ ( t ),with the frequency of the slave node f s , nominal frequency f o , offset ∆ f , perturbation ξ ( t ) ⇒T s = 1 f o ±∆ f +ξ ( t ) ≈ T o (1 ∓ ρ )+ ζ ( t ), ρ ∆ f / f o , ζ ( t )= −ξ ( t )/ f o • TW-TOA measurements: z k = d c + T D s 2 + n k , k = 1,..., N , n k ∼ N (0, σ 2 ) c the speed of propagation, d the Euclidian distance between two nodes. T D s : processing delay in the slave node nominal value for the delay T D s = DT 0 with D as an integer • The total delay: T D s = wDT o + ε k with ε k as a delay in detecting the signal presence. The arrived signal at the slave node may be detected after ε k . • A natural way to model ε k : ε k ∼ U (0, wT o ), for high SNRs, with high probability time-of-arrival detection happens in the period that signal arrives. • The ranging model: z k = d c + wDT o 2 + ε k 2 + n k , k = 1,..., N Ranging Algorithms 1-Maximum Likelihood Estimator (MLE) The measurements vector: z [z 1 ,..., z N ] T . The pdf of z indexed: p Z (z; θ )= N ∏ k=1 wT 0 x=0 p Z k (z k |x, θ ) p ε k (x)dx = N ∏ k=1 wT 0 x=0 1 √ 2πσ wT 0 exp − (α k − x/2) 2 2σ 2 dx with α k z k − d /c − wDT 0 /2 and θ [d , w , σ ]. No closed-form expression for the p Z (z; θ ). Using x 0 exp(−π t 2 )dt ≈ 1 2 tanh ( 39x 2 − 111 2 arctan ( 35x 111 )) , an approximate MLE (AMLE): maximize σ ; w; d −N (wT 0 )+ N ∑ k=1 log tanh 39α k 2 √ 2πσ − 111 2 arctan( 35α k 111 √ 2πσ − tanh 39β k 2 √ 2πσ − 111 2 arctan( 35β k 111 √ 2πσ where β k = α k − wT 0 /2 • AMLE poses a difficult global optimization problem (Fig. 1) 40 45 50 55 60 0.9 1 1.1 1.2 −1500 −1000 −500 0 d w AMLE cost function (a) 40 45 50 55 60 2 4 6 8 x 10 −9 −1200 −1000 −800 −600 −400 −200 0 d σ AMLE cost function (b) 0.9 1 1.1 1.2 2 3 4 5 6 7 x 10 −9 −40 −35 −30 −25 −20 −15 w σ AMLE cost function (c) Fig. 1. AMLE cost function for (a) d and w for fixed σ =1/c, (b) d and σ for fixed w =1.0001, and (c) w and σ for fixed d = 50. We now obtain the AMLE expression by solving an opti- where . Hence, an estimate of the 2-A Low Complexity Estimator Based on Method of Moment Consider the relations between the unknown parameters and the following statistics: μ 1 Ez k = d c + D 2 + 1 4 wT 0 μ 2 E(z k − μ 1 ) 2 = σ 2 + (wT 0 ) 2 48 μ 4 E(z k − μ 1 ) 4 = 3σ 4 + σ 2 (wT 0 ) 2 8 + (wT 0 ) 4 1280 The statistics μ 1 , μ 2 , and μ 4 can be approximated by the means of ensemble averaging μ 1 ≈ ∑ N k=1 z k N = S 1 , μ 2 ≈ ∑ N k=1 (z k − S 1 ) 2 N = S 2 , μ 4 ≈ ∑ N k=1 (z k − S 1 ) 4 N = S 4 . From the statistics μ 2 and μ 3 a(wT o ) 4 = μ 4 − 3 μ 2 2 with a 1/1280 − 3/48 2 . An estimate of the clock skew w = 1 T o S 4 − 3S 2 2 a 1/4 Alternatively, an estimate of the clock skew considering w K =(1 + ρ ) K ≈ 1 + K ρ , w = 1 + aT 4 o − S 4 + 3S 2 2 4aT 4 o It can be shown that the estimator is asymptotically unbiased, i.e., E ˜ w ≈ 1 + aT 4 o −a(wT 0 ) 4 4aT 4 o ≈ w , N ≫ 1 Estimates of the distance and the variance σ 2 : d = c S 1 − D 2 + 1 4 wT 0 σ 2 = S 2 − ( wT 0 ) 2 48 Numerical Results & Conclusions • Simulation parameters: the distance between a master and a slave node d = 30 [m] f 0 = 100 MHz, ρ = 0.0001 corresponding to 10 KHz frequency offset, D = 10 • Comparison between the proposed technique, traditional approach, and counter-based technique • TW-TOA measurements for 10 ms • 1000 realizations of noise 0 0.5 1 1.5 2 2.5 3 3.5 x 10 −9 29.9 30 30.1 30.2 30.3 30.4 30.5 30.6 30.7 30.8 0.5 1 1.5 2 x 10 −9 30.75 30.7505 30.751 30.7515 Standard deviation of noise, σ Mean of the distance estimate [m] Proposed Traditional Counter-based (a) 0 0.5 1 1.5 2 2.5 3 3.5 x 10 −9 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 Counter−based Standard deviation of noise, σ RMSE [m] Proposed Traditional (b) Fig. 2. Comparison between different approaches, (a) the mean of distance estimate and (b) the RMSE of the esti- mate. • The proposed technique shows a considerable gain, especially for high SNRs 0 100 200 300 400 500 29.5 30 30.5 31 31.5 32 32.5 33 33.5 34 N E d [m] Theoretical Actual Fig. 3. The mean of the distance estimate versus the num- ber of samples N . • After a sufficient number of samples, e.g., 100 corresponding to 1 micro second, the estimate is very close to the theoretical value Contact Information: [email protected]
-
Upload
m-reza-gholami -
Category
Documents
-
view
12 -
download
0
Transcript of Ranging

Ranging Without Time Stamps ExchangingMohammad Reza Gholami, Satyam Dwivedi, Magnus Jansson, and Peter Handel
ACCESS Linnaeus Centre, Department of Signal Processing,
KTH–Royal Institute of Technology, Stockholm, Sweden
Abstract
We investigate the range estimate between two wireless nodes without time stamps exchanging.Considering practical aspects of oscillator clocks, we propose a new model for ranging in whichthe measurement errors include the sum of two distributions, namely, uniform and Gaussian. Wethen derive an approximate maximum likelihood estimator (AMLE), which poses a difficult globaloptimization problem. To avoid the difficulty in solving the complex AMLE, we propose a simpleestimator based on the method of moments. Numerical resultsshow a promising performance forthe proposed technique.
Introduction
•Wireless sensor networks: a significant growing technologyin different areas
•Ranging based on (two-way time-of-arrival) TW-TOA by exchanging the time stamps
•Ranging based on TW-TOA is severely affected by an imperfectclock
•Affine function to model the local clock, parameterized by clock offset and clockskew, the distance estimate between two nodes is mainly affected by an imperfectclock skew
• In this study: no continuous clock reading, no communication during ranging
System Model
•TW-TOA between a master node equipped with a time-to-digital convertor (TDC)and a slave node•The clock of the slave node:Cs(t) = θ0+wt, clock offsetθ0, clock skeww = 1+ρ•The relation between the clock skew and the oscillator frequency offset:fs = fo±∆ f +ξ (t),with the frequency of the slave nodefs, nominal frequencyfo,offset∆ f , perturbationξ (t)
⇒Ts =1
fo±∆ f+ξ (t) ≈ To(1∓ρ)+ζ (t), ρ , ∆ f/ fo, ζ (t) =−ξ (t)/ fo
•TW-TOA measurements:zk =dc +
T Ds2 +nk, k = 1, . . . ,N, nk ∼ N (0,σ2)
c the speed of propagation,d the Euclidian distance between two nodes.T D
s : processing delay in the slave nodenominal value for the delayT D
s = DT0 with D as an integer•The total delay:T D
s = wDTo+ εk with εk as a delay in detecting the signal presence.The arrived signal at the slave node may be detected afterεk.•A natural way to modelεk: εk ∼ U (0,wTo), for high SNRs, with high probabilitytime-of-arrival detection happens in the period that signal arrives.•The ranging model:zk =
dc +
wDTo2 + εk
2 +nk, k = 1, . . . ,N
Ranging Algorithms
1-Maximum Likelihood Estimator (MLE)The measurements vector:z , [z1, . . . ,zN]
T . The pdf ofz indexed:
pZ(z;θ) =N
∏k=1
∫ wT0
x=0pZk(zk|x, θ)pεk(x)dx =
N
∏k=1
∫ wT0
x=0
1√2πσwT0
exp
(−(αk− x/2)2
2σ2
)dx
with αk , zk −d/c−wDT0/2 andθ , [d,w,σ ]. No closed-form expression for thepZ(z;θ).Using
∫ x0 exp(−πt2)dt ≈ 1
2 tanh(
39x2 − 111
2 arctan(
35x111
)), an approximate MLE (AMLE):
maximizeσ ; w; d
−N(wT0)+N
∑k=1
log
[tanh
(39αk
2√
2πσ− 111
2arctan(
35αk
111√
2πσ
)
− tanh
(39βk
2√
2πσ− 111
2arctan(
35βk
111√
2πσ
)]
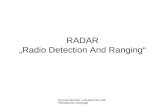
whereβk = αk−wT0/2•AMLE poses a difficult global optimization problem (Fig. 1)
40
45
50
55
60
0.9
1
1.1
1.2
−1500
−1000
−500
0
dw
AMLEcostfunction
(a)
40
45
50
55
60
2
4
6
8
x 10−9
−1200
−1000
−800
−600
−400
−200
0
dσ
AMLEcostfunction
(b)
0.9
1
1.1
1.2
2
3
4
5
6
7
x 10−9
−40
−35
−30
−25
−20
−15
wσ
AMLEcostfunction
(c)
Fig. 1. AMLE cost function for (a) d and w for fixed σ = 1/c, (b) d and σ for fixed w = 1.0001, and (c) w and σ forfixed d = 50.
We now obtain the AMLE expression by solving an opti- where . Hence, an estimate of the
2-A Low Complexity Estimator Based on Method of MomentConsider the relations between the unknown parameters and the following statistics:
µ1 , Ezk =dc+
(D2+
14
)wT0
µ2 , E(zk −µ1)2 = σ2+
(wT0)2
48
µ4 , E(zk −µ1)4 = 3σ4+σ2(wT0)
2
8+(wT0)
4
1280
The statisticsµ1, µ2, andµ4 can be approximated by the means of ensemble averaging
µ1 ≈∑N
k=1zk
N= S1, µ2 ≈
∑Nk=1(zk−S1)
2
N= S2, µ4 ≈
∑Nk=1(zk −S1)
4
N= S4.
From the statisticsµ2 andµ3
a(wTo)4 = µ4−3µ2
2
with a , 1/1280−3/482.An estimate of the clock skew
w =1To
(∣∣∣∣S4−3S2
2
a
∣∣∣∣)1/4
Alternatively, an estimate of the clock skew consideringwK = (1+ρ)K ≈ 1+Kρ ,
w = 1+aT 4
o −S4+3S22
4aT 4o
It can be shown that the estimator is asymptotically unbiased, i.e.,Ew ≈ 1+ aT 4
o −a(wT0)4
4aT 4o
≈ w, N ≫ 1Estimates of the distance and the varianceσ2:
d = c
(S1−
(D2+
14
)wT0
)
σ2 =
∣∣∣∣S2−(wT0)
2
48
∣∣∣∣
Numerical Results & Conclusions
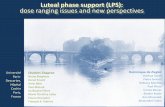
•Simulation parameters: the distance between a master and a slave noded = 30 [m]f0 = 100 MHz,ρ = 0.0001 corresponding to 10 KHz frequency offset,D = 10•Comparison between the proposed technique, traditional approach, andcounter-based technique•TW-TOA measurements for 10 ms• 1000 realizations of noise
0 0.5 1 1.5 2 2.5 3 3.5
x 10−9
29.9
30
30.1
30.2
30.3
30.4
30.5
30.6
30.7
30.8
0.5 1 1.5 2
x 10−9
30.75
30.7505
30.751
30.7515
Standard deviation of noise, σ
Meanofthedistanceestimate[m]
Proposed
Traditional
Counter-based
(a)
0 0.5 1 1.5 2 2.5 3 3.5
x 10−9
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Counter−based
Standard deviation of noise, σ
RMSE[m]
Proposed
Traditional
(b)
Fig. 2. Comparison between different approaches, (a) the
mean of distance estimate and (b) the RMSE of the esti-
mate.
•The proposed technique shows aconsiderable gain, especially forhigh SNRs
0 100 200 300 400 500
29.5
30
30.5
31
31.5
32
32.5
33
33.5
34
N
Ed[m]
Theoretical
Actual
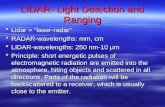
Fig. 3. The mean of the distance estimate versus the num-
ber of samplesN .
•After a sufficient number ofsamples, e.g., 100 correspondingto 1 micro second, the estimate isvery close to the theoretical value
Contact Information:[email protected]