Techniques adaptatives pour l'imagerie ... - univ-lorraine.fr

HAL Id: tel-01752755https://hal.univ-lorraine.fr/tel-01752755
Submitted on 29 Mar 2018
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Modélisation des machines asynchones et synchrones àaimants avec prise en compte des harmoniques d’espace
et de temps : application à la propulsion marine parPOD
Rambane Lateb
To cite this version:Rambane Lateb. Modélisation des machines asynchones et synchrones à aimants avec prise en comptedes harmoniques d’espace et de temps : application à la propulsion marine par POD. Matière Conden-sée [cond-mat]. Institut National Polytechnique de Lorraine, 2006. Français. NNT : 2006INPL055N.tel-01752755

AVERTISSEMENT
Ce document est le fruit d'un long travail approuvé par le jury de soutenance et mis à disposition de l'ensemble de la communauté universitaire élargie. Il est soumis à la propriété intellectuelle de l'auteur. Ceci implique une obligation de citation et de référencement lors de l’utilisation de ce document. D'autre part, toute contrefaçon, plagiat, reproduction illicite encourt une poursuite pénale. Contact : [email protected]
LIENS Code de la Propriété Intellectuelle. articles L 122. 4 Code de la Propriété Intellectuelle. articles L 335.2- L 335.10 http://www.cfcopies.com/V2/leg/leg_droi.php http://www.culture.gouv.fr/culture/infos-pratiques/droits/protection.htm

!"
!#$"
%&# "
'(Présentéeà
)
envuedel’obtentiondugradede
)***
Spécialité:GénieElectrique
par
+
&(&!,* *)&-
(((( ''((((..''((((..''(( ((
//(( (('' 0011(())(( ((22####33######
le19octobre2006devantlaCommissiond’Examen
%4
B.LEMAIRE*SEMAIL ProfesseuràPolytech’Lille Présidente
M*EZAIM Professeuràl’EPUNSaintNazaire Rapporteur
M.GABSI MaîtredeConférencesàL’ENSCachan Rapporteur
A.REZZOUG ProfesseuràL’UHP*Nancy Examinateur
F.MEIBODY*TABAR Professeuràl’INPL Directeurdelathèse
N.TAKORABET MaîtredeConférencesàl’INPL Co*directeurdethèse
J.ENON CONVERTEAMMotors–Nancy Invité
A.SARRIBOUETTE CONVERTEAMMotors–Nancy Invité
J*C.MERCIER CONVERTEAMMotors–Nancy Invité
A.MIRZAIAN CONVERTEAMFrance–Belfort Invité
&# 1! 5(6786

REMERCIEMENTS Ces travaux de recherche se sont déroulés au laboratoire du Groupe de Recherche en
Electrotechnique et en Electronique deNancy (GREEN). Ils s’inscrivent dans le cadre d’unecollaborationentreleGREEN,ConverteamMotorsdeNancyetConverteamFrancedeBelfort,deuxentitésdeConverteamanciennementAlstomPowerConversion.
J’adresse mes respectueux remerciements à Monsieur A. REZZOUG, Professeur àl’UniversitéHenryPoincarédeNancyetDirecteurduGREENquiabienvoulum’accepterdanssonlaboratoirepourl’élaborationdecettethèseetdem’avoirfaitl’honneurdefairepartiedecejury.Qu’il trouve en ces quelquesmotsma reconnaissance etma gratitude pour ces précieuxconseils.
Je tiens à exprimer ma sincère gratitude à Monsieur F. MEIBODY*TABAR, Professeur àl’INPLdeNancy,pour avoir étémonDirecteurde thèse.Ses connaissanceset sonexpérienceont été une source constante de savoir. Qu’il trouve en ces quelques lignes ma profondesympathie.
Je remercieMonsieur N. TAKORABET,Maître de Conférences à l’INPL, pour avoir co*encadré ma thèse. Sa grande disponibilité et son engagement scientifique m’ont aidé à medépasserdurantcesannées.
Jesuisparticulièrementsensibleàl’honneurquem’ontfaitMadameB.LEMAIRE*SEMAIL,Professeur à Polytech’Lille d’accepter d’être Présidente du jury et Messieurs M*E ZAIM,Professeur à l’EPUN Saint Nazaire et M. GABSI Maître de Conférences à L’ENS Cachan,d’accepterd’êtrerapporteursdecettethèse.
Mes remerciements vont aussi à l’endroit de Monsieur A. MIRZAIAN de la SociétéCONVERTEAM,poursonsuividurantmonstagedeDEAetsonaccueilchaleureuxdanssonéquipe.Qu’iltrouveicimaprofondesympathiepoursadisponibilitéetsesqualitéshumaines.
Cetravailaégalementétéréaliségrâceàlacompétenceetàlasympathiedel’équipetechniquedeCONVERTEAMMotorsdeNancy. J’adresseungrandmerci àMessieurs, J.ENONetA.SARRIBOUETTEpourlaconfiancequ’ilm’onttémoignétoutaulongdecesannées,pourleurdisponibilitéetaussipouravoiracceptédefairepartieduJury.
Mes vifs et sincères remerciements à Monsieur J.C. MERCIER, Directeur Technique deCONVERTEAMpouravoiracceptédeparticiperdanslejurymaisaussipourlaconfiancequ’ilm’atémoignéenm’accueillantdanssonéquipe,mepermettantainsidecontinuer l’aventureauseindeCONVERTEAM.
J’aisincèrementappréciédurantcesannéeslabonneetchaleureuseambianceentretenueparles doctorants du laboratoire que je remercie vivement. Je tiens à saisir cette occasion pourremercier lescollaboratricesetcollaborateurs, les technicienneset techniciensdu laboratoireduGREENettoutlecorpsderecherchedulaboratoireduGREENetleursouhaitedusuccèsdanstoutcequ’ilsentreprendront.
Que ceux qui se sentent oubliés, trouvent dans cette phrasema profonde gratitude etmesremerciementspourl’aideetlesoutienapportédurantcesannées.
Jesouhaiteaussiremerciertouteslespersonnesquim’ontnourridurantmavieparleursavoirleurgentillesseetleurdévouement.Jenesauraidécrireenquelquesmotsmagratitude.
Jesuisimmensémentreconnaissantàmesparentsquim’ontsoutenutoutaulongdemavie.Jeleurdoisbeaucoup.Qu’ilstrouventdanscemanuscrittoutemareconnaissanceetlesignequejesuisenfinarrivéaubout.

Enfin, comme dirait un poète de chez nous, «même si lamer devient encre, et le ciel dupapier»,celanesauraitsuffirepourexprimertoutcequejedoisàmafemme,poursonsoutien,sesencouragementsconstantsetlapatiencedontelleasus’armertoutaulongdecesannées.
A m es Parents, M edA rab et O uiza
A m on épouse Sam ira
A m on fils Ilian

SOMMAIRE
Introduction Générale.....................................................................................................................................1 Problématique et motivations .........................................................................................................................1 Structure de la thèse .......................................................................................................................................2
1.1. Introduction .......................................................................................................................... 5
1.2. Le tout électrique.................................................................................................................. 6
1.3. Différentes structures des machines électriques pour les POD........................................ 8 11..33..11.. La machine synchrone à rotor bobiné à double étoile......................................................................8 11..33..22.. Topologies des machines à aimants permanents. .............................................................................9 11..33..33.. La machine asynchrone..................................................................................................................12
1.4. Comparaison des performances des différentes topologies ............................................ 13
1.5. Principaux matériaux utilisés dans les machines électriques ......................................... 14 11..55..11.. Aimants permanents.......................................................................................................................15 11..55..22.. Matériaux magnétiques ..................................................................................................................17
1.6. Topologie des convertisseurs et composants ................................................................... 21
1.7. Fiabilité des systèmes ......................................................................................................... 25
1.8. Exigences et contraintes de l’application par POD......................................................... 26
1.9. Matériaux et contraintes pour l’application considérée ................................................. 29
1.10. Conclusion........................................................................................................................... 32
2.1. Introduction ........................................................................................................................ 32
2.2. Approche de dimensionnement et d’optimisation........................................................... 34
2.3. Influence des paramètres géométriques sur le couple moyen ........................................ 35
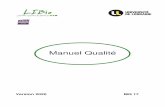
2.4. Minimisation des harmoniques du "couple d’interaction" ............................................ 38 22..44..11.. Harmoniques de bobinage..............................................................................................................40 22..44..22.. Harmoniques de l’induction d’entrefer produite par les aimants ...................................................42
2.5. Minimisation du couple de détente ................................................................................... 45 22..55..11.. Nombre d’encoches statoriques .....................................................................................................46 22..55..22.. Epanouissement des aimants et effet de la segmentation...............................................................47 22..55..33.. Cales magnétiques..........................................................................................................................49
2.6. Dimensionnement et résultats de simulation pour différentes polarités ....................... 51 22..66..11.. Niveau d’induction et hauteur de culasse.......................................................................................52 22..66..22.. Force électromotrice à vide............................................................................................................55 22..66..33.. Couple moyen et ondulations de couple ........................................................................................55 22..66..44.. Pertes..............................................................................................................................................56 22..66..55.. Synthèse du dimensionnement .......................................................................................................57 22..66..66.. Etude de la tenue magnétique des aimants.....................................................................................57 22..66..77.. Validation expérimentale des résultats de simulation ....................................................................59
2.7. Modèle externe.................................................................................................................... 62 22..77..11.. Inductances dynamiques ................................................................................................................62 22..77..22.. Harmoniques de temps...................................................................................................................69 22..77..33.. Formes d’onde du courant..............................................................................................................70 22..77..44.. Calcul du couple pulsatoire............................................................................................................71
2.8. Conclusion........................................................................................................................... 73
3.1. Introduction ........................................................................................................................ 84
3.2. Quelques aspects de dimensionnement de la machine asynchrone................................ 84 33..22..11.. Principales relations .......................................................................................................................85

33..22..22.. Règles de dimensionnement...........................................................................................................88 33..22..33.. Classification des harmoniques d’espace et de temps....................................................................91
3.3. Modèle mono harmonique d’espace ................................................................................. 92
3.4. Modèle multi harmoniques d’espace (MHE)................................................................... 95 33..44..11.. Introduction....................................................................................................................................96 33..44..22.. Méthode de décomposition spectrale des courants ........................................................................98 33..44..33.. Modèle circuit associé à la décomposition en série de Fourier discrète.......................................101 33..44..44.. Approche de calcul des pertes et du couple résultant...................................................................102
3.5. Modèle Multi - harmoniques de temps (MHT).............................................................. 107 33..55..11.. Introduction..................................................................................................................................107 33..55..22.. Considération des harmoniques d’espace dans le modèle MHT..................................................108 33..55..33.. L’effet de peau .............................................................................................................................108 33..55..44.. Modèle circuit équivalent.............................................................................................................109 33..55..55.. Validation du modèle MHT .........................................................................................................117
3.6. Mise en œuvre des modèles pour l’optimisation des machines asynchrones .............. 122 33..66..11.. Utilisation du modèle mono harmonique .....................................................................................122 33..66..22.. Utilisation du modèle MHE .........................................................................................................130 33..66..33.. Utilisation du modèle MHT .........................................................................................................133 33..66..44.. Utilisation du logiciel Flux2D......................................................................................................137
3.7. Récapitulatif des principales performances................................................................... 143
3.8. Conclusion......................................................................................................................... 144
4.1. Introduction ...................................................................................................................... 152
4.2. Dimensions géométriques et Principales performances................................................ 152
4.3. Considérations Technico-Economiques ......................................................................... 155
4.4. Discussion et conclusion................................................................................................... 155
Conclusion générale ............................................................................................................. 157
References bibliographiques ............................................................................................... 160
Annexe ................................................................................................................................... 167
A.1. Dimensions des dents et des culasses .............................................................................. 167
A.2. Le nombre de spires et courant par phase ..................................................................... 168
A.3. Hauteur des aimants et entrefer...................................................................................... 168
A.4. Les harmoniques de courants.......................................................................................... 173
B. Vrillage .................................................................................................................................. 174
C.1. Les pertes Joule ................................................................................................................ 179
C.2. Les pertes fer dans la machine à aimants permanents ................................................. 179
C.3. Pertes par courant de Foucault dans les aimants .......................................................... 182
D.1. Influence de la température sur les performances externes de la MSAP.................... 185

INTRODUCTIONGENERALE
1
&&!!!!

INTRODUCTIONGENERALE
1
&!!Desévolutions importantesonteu lieucesdernièresannéesgrâceauxprogrèsréalisésdans lesdomainesdesmatériaux(magnétiques,mécaniques,thermiques..),del’électroniquedepuissance(grandespuissances,grandesfréquences,nouvellestopologies…),delacommande(technologiesnumériques,méthodesdecontrôle),descapteursmaisaussidesstructuresdemoteurs.Touscesprogrèsontpermisd’envisagerdesapplicationsàvitessevariabledemanièreefficace.L’entraînement direct représente la simplification ultime des systèmes de conversion d’énergiepuisqu’il permet de s’affranchir des organes de transmissions mécaniques (réducteurs,multiplicateurs…) afin d’améliorer la fiabilité, la facilité de la maintenance, la réduction del’encombrement,lecoûtetleniveaudebruit.Àtraversl’histoiredelaconstructionnavale,souvent,ledéfifûtdanslamanièredeconstruirelenavire autourd’un systèmedepropulsion, ceciest encorevrai avec les systèmesdepropulsionactuelsetenparticulier,lessystèmesdepropulsionmontésennacelleàl’extérieurdelacoque,oùil a fallut repenser toute l’architecture des navires. En effet, la solution en nacelle intervient àl’issued’uneréflexionsimple:commentaméliorerlesystèmedepropulsiondemanièreàgagnerde l’espace exploitable sans pour autant perdre en rendement ni en puissance du système depropulsion?
%!9
Legainenespaceexploitableissued’unmariagedel’entraînementdirectetd’unearchitectureennacelle dans lapropulsionnavale est, sansnul doute, confirmé.Toutefois, cela a engendrédesproblématiquesnouvelles,tellesquelaperteenrendementhydrodynamique.Eneffet,ungranddiamètredubulbe(chambredanslequelest introduit lemoteurélectrique)affectelerendementhydrodynamique.Cetaspectanécessitéd’unepart,detravaillerlaformedubulbeetdel’hélice,d’autre part, d’améliorer la structure des machines électriques pour permettre un gain enpuissancevolumique.Pouraméliorerlapuissancespécifiquedesmoteursélectriques,deuxapprochesontétéadoptéespar les chercheurs et les industriels. L’une consiste à introduire de nouvelles topologies demachines(moteursàfluxtransverse,àfluxaxial,moteurssupraconducteurs…)quisurlepapieront incontestablement un fort couple volumique, mais qui reste à l’état actuel au stade deprototypes.L’autreapprocheconsisteàaméliorercertainesstructuresdemoteursélectriquesdéjàéprouvées.Ce travail de recherche s’inscrit dans la seconde catégorie et est le fruit d’une collaborationderecherche avec deux entités de la société Converteam anciennement connue sous le nom deAlstomPowerConversion(APCBelfortetAPCChampigneulles)et le laboratoire:GroupedeRechercheenElectroniqueetElectrotechniquedeNancy.Pourlesbesoinsdecetteétude,deuxstructuresdemachinesontétéretenues,lamachineàaimantspermanentsmontésensurfaceetlamachine asynchrone. Le choix de ces deux structures de moteurs est prémédité, puisque lesmoteursàaimantspermanentsontuncouplevolumiquerelativementélevéalorsquelesmoteursasynchronessontindéniablementrobustes,demiseenœuvreetdemaintenancesimplesavecuncoûtfaible.Lepointcommundecesdeuxarchitecturesrésidedansleurtechnologiequiestbienmaîtriséeparlesconstructeurs.

INTRODUCTIONGENERALE
2
L’étude consiste alors, à dimensionner ces deux structures de machines destinées à la
propulsionmarine en nacelle, en respectant les contraintes liées à ce type de propulsion,maisaussi,àlamiseenœuvreindustrielle.Pourcefaire,ilestimportantd’identifieretdeformulerlescontraintesinhérentesàchaquestructure.
Pourlemoteuràaimantspermanents,lesprincipalescontraintesrésidentdanslaminimisationdesondulationsducoupleet ledimensionnementdesaimantspourparerauxéventuelsrisquesdedémagnétisationdesaimantslorsd’unfonctionnementanormal(court*circuitparexemple)etdescontraintesdetempératures.
Pour lamachine asynchrone, au côté de la contrainte commune qu’est laminimisation desondulationsducouple,uneautredifficultéestd’atteindre lesperformances requisesengardantun encombrement quasi*similaire à celui de lamachine à aimants permanents. Par ailleurs, lespertes Joule rotoriques et la température de fonctionnement sont des aspects tout aussicontraignantqu’ilfautsoigneusementconsidérerlorsdudimensionnement.
L’évaluationdesperformancesde lamachineasynchrone,passepar laprédictiondespertessupplémentaires. En effet, contrairement à la machine à aimants permanents, les pertes Joulerotoriquessontimportantesetcertainsphénomènesparasitestelsque,lesharmoniquesd’espaceset les harmoniques de temps, sont aussi des sources de pertes. Pour ce faire, il est nécessaired’établir des méthodes et des modèles pouvant prendre en compte ces phénomènes et depouvoir,ainsi,prédiredemanièrerelativementpréciselespertesduesàcesharmoniques.
L’évacuationdecespertesestunpointtoutaussiimportant.Bienquelastructureennacelleseprêteàunrefroidissementindirectparlaconvectiondel’eaudemersurlesparoisdubulbe,ilesttoutefoisnécessairedel’associeràunmodederefroidissementdirectà l’air,enenvisageantdescanaux d’aération judicieusement placés dans la culasse des machines et en particulier, de lamachineasynchrone.
Laminimisationdesondulationsducouplepeutêtre traitéededeuxmanières.Lapremière,quinefaitpasl’objetdel’étude,consisteàcompenserlesondulationsducoupleparuneloidecommande adéquatemodifiant la forme des courants à injecter. La seconde, plus structurelle,portesurledimensionnementetl’actionsurlesparamètresgéométriques(nombreetformedesencoches,typesdebobinage,polarité,formeetépanouissementdesaimants…).Pournotrepart,ledimensionnementestétroitementliéàlafaisabilitéetàlafacilitédemiseenœuvreindustrielleet il est important de considérer cet aspect lors de l’étude de l’influence des paramètresgéométriquessurlesondulationsducouple.
Cesaspectssontprésentésdanscemémoirequis’articuleenquatrechapitres:
(:Danscetravailderecherche,nousnoussommesintéressésàlamiseenœuvrededémarches
simples de dimensionnement et d’optimisation pour les catégories de moteurs citéesprécédemmentetà lamiseenœuvredemodèles adaptés auniveaudeprécision souhaitée.Cemémoiresecomposedequatrechapitres.
Lepremierchapitreestconsacréà l’étatde l’artenmatièredepropulsionmarineennacelle.Aprèsavoirpasséenrevuelesprincipauxavantagesdelapropulsionennacelle,nousavonstentéderecenserlesdifférentesétudesayantabordéescethème.Dansceregistre,nousnoussommesprincipalement intéressé aux études axées sur les moteurs électriques. Plusieurs étudescomparatives des performances entre différentes topologies y sont reprises. Certains aspectsgravitantautourdesmoteursetayantdemanièredirecteouindirecteaméliorélesperformances,ysontbrièvementabordés(matériaux,composantsélectroniques,structuresdeconvertisseurs).

INTRODUCTIONGENERALE
3
Lesecondchapitreestdestinéàl’aspectthéoriquedesmachinesàaimantspermanentsmontésensurface.Aprèsavoirdéfini lesobjectifsdeperformanceset lescontraintes,unedémarchededimensionnementbaséesurlesélémentsfinisestmiseenœuvre.Lapremièrepartieconsisteenlaminimisationdesondulationsducoupleparlacombinaisondedifférentessolutions,sansaffecterlesperformances.Àcet effet,uneétudede l’influencedecertainsparamètresgéométriquesesteffectuée, sur le couplededétente, lesharmoniquesmais aussi sur le fondamental de laFÉM.Parallèlement,ledimensionnementdesaimantsesteffectuéentenantcompted’unetempératurelimiteetdansdesconditionsdefonctionnementanormal.
S’appuyant sur la démarche définie, l’évaluation des performances fait l’objet de la secondepartie. Cette évaluation ayant permis de faire ressortir une structure requérant un minimumd’ondulations de couple et atteignant les performances dans les conditions normales defonctionnement.Certainsrésultatssontcomparésavecdesmesureseffectuéessurunprototyperéalisé parConverteamChampigneulles. Par ailleurs, pour une étude plus complète, un court*circuit triphaséestsimuléet l’étatdedémagnétisationdesaimantsestanalysé.L’influencede lasaturationetdupointde fonctionnement sur certainsparamètres tellesque les inductancesestétudiée. En outre, l’évolution du couple et de ses ondulations en fonction du mode defonctionnement(défluxage,couplemax…)maisaussienfonctiondelatempératureestabordée.Une méthode de calcul du couple pulsatoire est mise en œuvre et validée par une méthodetemporelledecalculparélémentsfinis.
Dans la même logique, le troisième chapitre est consacré à l’élaboration des méthodes dedimensionnement de la machine asynchrone. Le dimensionnement de la machine asynchronenécessite de mettre en œuvre plusieurs modèles permettant d’évaluer certaines performancesinhérentesàlamachineasynchrone,tellesquelespertesJoulerotoriquesduesauxharmoniquesdebobinageetauxharmoniquesdetemps.Aupréalable,nousavonsidentifié,lesmoyensd’agirsurlastructure(nombred’encoches,nombredebarres,polarités)pourréduireàlafoisleseffetsdes harmoniques d’espaces mais aussi de réduire les couples parasites. Par ailleurs, certainsparamètresgéométriquesfontl’objetd’uneattentionparticulièrepuisqu’ilsrégissentdirectementles performances de la machine asynchrone, tel que la polarité. La structure est repensée demanièreàintroduiredescanauxd’aérationaxiauxauvoisinagedesencoches,pourunemeilleureévacuationcalorifique.
Surleplanméthodologique,nousavonsdéveloppédesmodèles,baséssurdesméthodesditesfréquentielles qui sont moins lourdes en temps de calcul par rapport aux méthodes ditestemporelles. Ces modèles couplés aux modèles circuit permettent d’estimer les pertes Joulerotoriquesduesauxharmoniquesd’espaceetdetemps.Parallèlement,l’effetdelasaturationsurl’inductancemagnétisanteetlesinductancesdefuitesestabordé.Unautreaspectconcernel’effetdelavariationdelafréquence(l’effetdepeau)maisaussil’ouverturedesencochesrotoriquessurlesparamètres rotoriques (inductancede fuites et résistance).Une fois lesmodèles établis et ladémarche formulée, l’évaluation des performances est présentée dans la seconde partie dutroisième chapitre; ce qui a permis de dégager les structures répondant aux critères deperformanceset auxcontraintes liées à l’application.Lechapitre se termineparuneévaluationdescouplespulsatoiresobtenusparuneméthodesemianalytiqueetparélémentsfinis(pasàpasdans le temps).Parallèlement,uneanalysedétailléedesharmoniques intervenantdans lecoupleestprésentéeaveclesdifférentessourcesd’harmoniquesentranteninteraction.
Finalement,lequatrièmechapitreregroupelesperformancesdesdeuxstructuresdemoteurs.Cettecomparaisonestprincipalementaxéesurl’encombrement,lecourantabsorbé,lespertesetlescouplespulsatoires.
Cestravauxontfaitl’objetd’unarticlederevueinternationale,d’unarticlederevuenationale,dequatrepublicationsdansdescongrès,d’unemonographieetdedeuxrapportsindustriels.

''22
&&!!!!!!!!99######

CHAPITREI:GENERALITES
5
;* ' 2 &( / ( 1(01
;*;* Ce chapitre aborde de manière succincte les différents développements rencontrés dans la
propulsionmarine.Dansunpremiertemps,nousrappelonsl’évolutionactuelledespropulsionsmarinesversletoutélectriqueetsaisissonsl’occasiond’énumérerlesavantagesd’unepropulsionennacelle.Pourquecetypedepropulsionpuisseatteindreunrendementénergétiqueacceptable,il est nécessaire de travailler la forme du bulbe et d’utiliser en conséquence les machinesélectriquesàpuissancevolumiqueélevée.
Pour situer notre étude, il est nécessaire de rappeler les étapes ayant motivés l’intérêt decertainesmachines électriquesdans lapropulsion ennacelle.En section3,uneprospectiondedifférentes topologies demoteurs électriques est présentée.Elle est complétée par une analysedescomparaisonsfaitesentermedeperformancesetd’encombrementainsiquedesperspectivesd’évolutiondurapportperformances/encombrementdesmachinesdestinéesàlapropulsionennacelle. Cette analyse nous conduit à privilégier les machines à aimants permanents et lesmachines asynchrones. Ces choix reposent sur le fait que comparés auxmoteurs actuellementutilisés, lesmoteurs à aimants permanents sont plus compacts (couplemassique élevé)alorsquelesmoteursasynchronesquisontrobustes,demiseenœuvreetdemaintenancesimplesavec un coût relativement plus faible, sont susceptibles d’atteindre une puissance volumiquecomparableàcelledesmachinesàaimantsàchampradial.
Ces objectifs ne sont envisagés que grâce aux évolutions enregistrées dans le domaine desmatériaux (notamment les aimants permanents et les matériaux ferromagnétiques), descomposants électroniques et de nouvelles architectures des convertisseurs statiques. Dans cesens, en section 5, nous présentons en premier lieu les aimants permanents et les matériauxferromagnétiques utilisés dans les machines électriques. Le type d’application étant la vitessevariable, nous avons trouvé utile de rappeler en section 6 les convertisseurs statiques les plusemployésdansl’alimentationdesmoteursdepropulsionainsiquelescomposantsélectroniquesquiysontutilisés.
Lafiabilitéreprésenteunaspectinhérentàcertainesapplicationstellesquel’aéronautiqueetlespatial, lamarine ne dérogeant pas à la règle, nous avons souligné les aspects redondants desinstallations électriques. Cette redondance se retrouve aussi dans le mode d’alimentation desmachinesélectriquesetc’estdanscetteperspectivequenousavonsbrièvementprésentéunmoded’alimentationfortsusceptibled’équiperl’applicationquinousconcerne.
Al’instardelaplupartdesapplicationsindustrielles,lescontraintesqu’imposeuneapplicationen nacelle sont nombreuses, telles que, l’encombrement, la température, la tenue au choc, lesvibrations, les pertes et le coût. C’est ainsi que pour notre application, nous avons dégagé lesprincipales exigences et contraintes que nous avons regroupés dans un tableau.Ony retrouvenotamment les limites dimensionnelles, thermiques, mais aussi les performances et objectifs àatteindre.L’aspectstructurelestaussidéfinidanscettesection,comme lechoixdesaimants, lechoixdesmatériauxpourlestatoretlerotor.Onabordeenoutre,letyped’alimentationquiseraassociéaumoteurconcernéetlemodedeventilationadoptépourcegenred’application.

CHAPITREI:GENERALITES
6
;*<* !Aujourd’hui plus qu’hier, tous les secteurs militaires et civils * qu’ils soient maritimes,
terrestres,aériensouspatiaux*fontdeplusenplusappelàl’électricité,plusfiable,plussoupleetmoins polluante, pour assurer les fonctions majeures de mobilité et d’évolution. Cette«électrification»tousazimutssetraduitd’unepart,parlaconceptiondenouveauxéquipements(moteurs, actionneurs, convertisseurs, électroniques, composants électroniques) et, d’autrepart,parledéveloppementdesourcesd’énergiestatiques(électrochimiques,pilesàcombustible,supercondensateurs)etdynamiques(génératricesetalternateurs).
Dans le domaine maritime, le navire tout électrique s’impose comme une solution et unefinalitéàlaplupartdesarmateurs.Dansl’immédiat,etenparticulierpourlespaquebots,onyavulesavantagessurl’architecture,leconfort,lasouplessed’exploitationetdepilotage,ainsiquesurlagestiondel’énergieavec,enprime,uneéconomiesubstantiellesurlecoûtdefonctionnement.Pour les bâtiments de combats, l’expression «tout électrique» implique outre les avantages dediscrétion, de souplesse, de fiabilité et de facilité de la gestion de l’énergie, la possibilitéd’intégrationdes futures armesélectriques ainsiqued’utilisationdenouvelles sourcesd’énergieélectrique==;;>>==<<>>==88>>.
Audébutdesannées90estapparue l’idéedecombiner lesavantagesdemanœuvrabilitédesgouvernailsmécaniquesaveclaflexibilitédelapropulsionélectrique.L’idéedebaseestdelogerlemoteurélectriquedepropulsion,dansunenacelle,appelée pourcertains,ouenformed’unecossedenoixpourd’autresqui signifieenAnglais, fixéesous la coque à l’extérieur du navire, entraînant une hélice à pas fixe (cf. figure (1.1.b)). Sesavantagessont==<<>>:
§ Excellentemanœuvrabilité,lapousséedel’hélicepouvantêtreorientéesur360°.§ Réductionimportantedel’encombrementetdelamassedesmachinesàborddunavire.§ Suppressiondelaligned’arbreclassique,dugouvernail(figure1.1)etéventuellementde
certainspropulseursd’étrave(propulseursauxiliaireslatéraux)§ Améliorationduconfortenréduisantlebruitsonoreàbord.§ Possibilité d’installation tardive, quelques semaines seulement avant le lancement du
navire(figure(1.2)).§ ...
Au côté des appréciations positives, un examen critique de ce type de système issu des
premierscomptesrendusdelamiseenservicedesnaviresmetenreliefl’importanceducoûtderéalisation, de la nécessité d’un personnel qualifié et de la limitation en puissance de croisière==??>>==@@>>==AA>>* Toutefois ces points critiques sont à relativiser car l’expérience acquise sur cettetechnologiepermetdelesrésoudreprogressivement.
Autour de l’architecture POD gravite plusieurs domaines qui ont fait l’objet d’incessantesrecherches. Les multitudes de travaux sur l’hydrodynamique des propulseurs ==AA>>==66>>==BB>>,différentes étudesmenées sur lamotorisation ==CC>>==;;77>>==;;;;>>==;;<<>>==;;88>>==;;??>> et le développement descomposants électroniques ==;;@@>> depuis la fin des années 90 ont contribué à l’émergence de lapropulsion par POD à tel point qu’actuellement les plus grandes entreprises proposent cettesolution pour propulser les navires (figure (1.3)). La figure (1.4)montre le navire de croisièreQueenMaryIIquiestéquipédequatrePODMermaidTMde21.5MWchacun(technologieRollsRoyceetConverteam)dontdeuxazimutaux,permettantlapossibilitéderotationsur360°.

CHAPITREI:GENERALITES
7
==<<>>
(a)propulsiontraditionnelle==++++;;>> (b)propulsionparPOD==99<<>>
Figure1.1:Comparaisonentreunpropulsionennacelleetconventionnelle
Figure1.2:Installationd’unPOD(QueenMaryII*hhttttpp::////wwwwww..wwoorrllddsshhiippnnyy..ccoomm)
Mermaid™ Azipod® Dolphin™ SSP™
Figure1.3:DifférentestechnologiesdepropulsionPODexistantessurlemarché
1http://www.ABB.com2http://www.Converteam.com

CHAPITREI:GENERALITES
8
Figure1.4:VuedesquatrePODdetypeMermaid™surleQueenMaryII
(hhttttpp::////wwwwww..wwoorrllddsshhiippnnyy..ccoomm)
;*8* !!#Dans le domaine de la propulsion électrique, différents types de moteurs à structures
classiques associés aux convertisseurs statiques ont été utilisés ==88>>==;;AA>>. Le moteur à courantcontinuassociéàsonredresseur,estunesolutionpratiquementabandonnéedans lapropulsionmarine==;;AA>>.Parcontre,lesmoteurssynchronesàexcitation,associésauxsynchro*convertisseurs(commutateursdecourants),sontàcejour,lesplusutilisésdanslapropulsionmarine==88>>==;;AA>>.
Dans la propulsion par POD, afin d’améliorer le rendement hydrodynamique un faiblediamètre de «bulbe» est nécessaire. Cela conduit à des exigences d’un couple volumique etmassique de plus en plus important des moteurs électriques. Afin d’améliorer la puissancespécifiquedesmachinesélectriques,deuxapprochesontétéadoptéespar leschercheurs.L’uneconsisteàintroduiredenouvellestopologiesdemachines(moteursàfluxtransverse,àfluxaxial,moteurssupraconducteurs…).L’autreapprocheconsisteàaméliorerlesperformancesdecertainsmoteursélectriquesàstructuresdéjàéprouvéestellesquelesmachinesàaimantspermanentsetasynchronesàcaged’écureuil.
Dans ce contexte, nous allons présenter les différentes topologies de machines à aimantspermanentsetasynchronesetensebasantsuruneétudebibliographique,nouscomparonsleursperformancesvolumiquesetmassiques.
;;**88**;;** 3%%!3%!Aujourd’hui, la plupart des systèmes de propulsion par POD sont équipés de moteurs
synchronesàrotorbobinéàdoubleétoile,associésàdeuxonduleursdestructurecourant.Cetteassociationoffred’unepart,uneredondancenaturellegrâceàl’alimentationpardeuxonduleursidentiques(modularité).Ducôtémoteur,cetteassociationpermetderéduirelecouplepulsatoire,puisqueonannulel’harmoniqueducouplepulsantà6ω ,comptetenududécalagedesétoilesde30°. Cependant, d’autres harmoniques notamment celui pulsant à 12ω persistent et peuventposercertainsproblèmesd’ordremécaniqueàbassevitesse.
La configuration à deux étoiles décalées associée à une alimentation par deux onduleurs detension permet d’imposer des courants sinusoïdaux grâce à une fréquence de découpage plusélevée.Toutefois,pouréviterdespicsdecourantharmoniquescirculantentre lesétoiles (liéaucouplagemagnétiquedesdeuxétoiles),ilfaudraitquelesétoilessoientnondécalées.

CHAPITREI:GENERALITES
9
L’inconvénientdesmoteurs synchrones à rotorbobinépar rapport auxmachines à aimantspermanentsouasynchronesrésidedanslacomplexitéd’excitationdecesmachines.
Figure1.5:Vud’unrotorbobinéd’unmoteursynchrone
;;**88**<<** #D3#*Un exercice difficile consiste à répertorier tous les types et topologies des machines
synchronesà aimantspermanents, ainsiquedecomparer leursperformances.Cependant,nousprésenteronslesétudescomparativesquiontétéfaitesdanscesenstoutengardantàl’esprit lacompatibilité des topologies considérées avec les exigences en propulsion navale. Pour cetteapplication,lamachineestàentraînementdirectetdevraitavoirunefortepuissancemassiqueàvitesse lente. Il est à noter que les mêmes exigences s’imposent dans le secteur de l’énergieéolienne employant également des machines synchrones à aimants permanents (génératrice)montéesurpilon(mât).
Danscequisuitnousprésentonslesétudesconcernanttroistopologiesdemachinesàaimantspermanents.
;*8*<*;* 3 3#*Enfonctiondeladispositiondesaimantsaurotor,ondistingueplusieurstypesdemachinesà
aimants à structure cylindriques (figures (1.6)). Toutefois, pour les applications de fortespuissancesetàvitesselente,lesmachinesàaimantspermanentsmontésensurface(cas(a)delafigure 1.5) sont préférées pour leur facilité de construction. En raison de leur structure, lesmachines à aimants à champ radial répondent bien aux contraintes rencontrées dans lespropulsions en nacelle. En effet, ces machines semblent offrir une flexibilité dimensionnelleimportante à la conceptionpermettantde réduire le rapportdediamètrenacelle sur l’hélicede40% à 50% en comparaison aux machines synchrones conventionnelles requérant des grandsdiamètresàvitesselenteetimposentdoncdesdimensionsimportantesàlanacelleetdégradentlerendement nautique ==;;66>>. Ce gain en masse est obtenu, notamment, grâce à la facilité deréalisation des machines à aimants à plus grand nombre de paires de pôles, comparées auxmachinesàrotorbobiné,permettantainsi,uneréductionsignificativedesculasses==;;??>>==;;66>>.
Les études menées sur les machines à aimants à champ radial de fortes puissancesfonctionnantàvitesselente,ontmontréquel’adoptiondesbobinagesconcentriquesànombredepôles élevés (figure (1.7)), permet non seulement de réduire dans certains cas les pertes Joulestatoriques,mais aussi de réduire le coût de fabrication de cesmachines.En effet, ce type debobinage autorise des combinaisons qui allient un nombre de pôles élevé et un nombred’encoches faible ==;;BB>>==;;CC>>==<<77>>. Ces types de machines dites parfois modulaires, ont aussi la

CHAPITREI:GENERALITES
10
particularitéd’avoirdefaiblescouplesdedétente==;;BB>>==;;CC>>,silenombredepôlesetd’encochesestjudicieusement choisi. Par ailleurs, les courants de court*circuit peuvent être aussi réduit danscertainscas==<<;;>>.Toutefois,cesmachinesàbobinageconcentriquesemblentsujettesàdesforcesradialesplusimportantes,générantainsidesbruitsmagnétiques==;;BB>>==;;CC>>==<<<<>>..
(a)sanspiècespolaires (b)àaimantsinsérés (c)àaimantsenterrés
(d)àépanouissementpolaires (e)àconcentrationdeflux
Figure1.6:Vuetransversaledesmachinesàaimantspermanentsàfluxradial==<<<<>>
(a)Simplecouche (a)doublecouche
(e)21encoches/20pôles (f)24encoches/20pôles
Figure1.7:Exemplesdebobinageconcentriquedansunemachineàaimantsàfluxradial==<<<<>>==<<88>>

CHAPITREI:GENERALITES
11
;*8*<*<* 3E3#5*
Les moteurs discoïdes sont pourvus de disques fixes bobinées et de disques mobilessupportant lesaimantspermanents.L’avantagedéterminantde lastructurediscoïdeparrapportauxstructurescylindriquesprovientdel’optimisationdelasurfaceutiledegénérationducouple,qui se traduit par une puissance volumique importante. L’accroissement de la polarité dans cetypedemachinea lemêmeeffetquesur lesstructuresàchampradialet se traduit iciparunediminutiondelalongueur,levolumeétantparfaitementoccupé(figure(1.8)).
(a)structuresimple (b)structuredoublestator
(c)structuredoublerotor (b)structuremultirotormultistator
Figure1.8:Vued’unemachineàfluxaxial(différentesconfigurations)==<<??>>
Lesstructuresdiscoïdesoffrentégalementunegrandemodulariténaturelleparjuxtapositiondemodules,lapuissanceétantdéterminéeparlenombrededisquespourundiamètredonné==CC>>==;;77>>.Cette structure fait l’objet d’une attentionparticulière ==<<88>>.Malgré sapuissancemassiqueélevée,onsouligne toutefois l’existencedecontraintesmécaniques liéesauxpousséesaxialesetdescontraintesthermiquesduesàladifficultéd’évacuationdespertesstatoriques==CC>>==<<??>>.
;*8*<*8* 3359*
Danscettestructure,descircuitsmagnétiquesenformedeferàchevalrégulièrementdisposésentourent lebobinagestatoriquedechaquephase(figure(1.9)).Unmoteuràfluxtransverseq*phasé comprendra alors plusieurs moteurs monophasés (circuits magnétiques) montés sur lemêmearbreetdécalésd'unanglegéométriquede2π/q(figure(1.10)et(1.11)).
Cesstructuressontparticulièrementadaptéespourdesexigencesdefortedensitédecouple,toutefoissacomplexitémécaniqueetsoncoûtderéalisationfontqu’elleestencoreaustadededéveloppement==;;??>>==<<AA>>==<<66>>..Parailleurs,onsoulignedefortscouplespulsatoires,desvibrationset des pertes fer excessives dues au caractère tridimensionnel du champ ==;;77>>==<<AA>>==<<66>>. Pourréduirecespertes,onpourraitutiliserdesmatériauxmagnétiquescomposites(poudrecompacte)audétrimentducouplevolumiqueliéàunniveaud’inductiondesaturationrelativementfaibledece type de matériau. En outre, les quelques réalisations effectuées ont mis en évidence quel’achèvement d’un fort couple volumique se traduit par un surdimensionnement de la partieconvertisseur==<<AA>>.

CHAPITREI:GENERALITES
12
Figure1.9:Principed’unemachineàfluxtransverse==<<AA>>
Figure1.10:Vued’unemachineàfluxtransverse==<<BB>>
Figure1.11:Vued’unemachineàfluxtransversetriphasée==<<CC>>
;;**88**88**
Deparsarobustesse,soncoûtetsasimplicité,lamachineasynchroneàcagepeutoffrirunealternative intéressante dans la propulsion par POD. Ces machines comparées aux machinessynchrones à aimants, ontdespertes Jouleplusélevées, notamment au rotor.Cependant, ellespeuventsupporteruneélévationdetempératureplusimportante.Lestravauxencoursontpourobjectif la mise en place de moyens de refroidissement plus efficaces et une amélioration

CHAPITREI:GENERALITES
13
structurelle de la machine pour mieux évacuer les calories ==8877>>. L’autre objectif consiste àaméliorerlerendementetàramenerl’encombrement(couplevolumique)decesmachinesàceluidelamachineàaimantspermanentsàfluxradial==8877>>==88;;>>.
Figure1.12:Machineasynchronede4.7MW,45tr/mn==8877>>
;*?* ##!#DPlusieurs études établissent une comparaison des performances des topologies demoteurs.
Dans ==;;??>> unecomparaisondesperformancesdeplusieursmoteursde20MWayant lamêmevitessenominale(180tr/min)estfaite.Lesprincipalesperformancesetparamètresgéométriquesdecesmachinessontrésumésdansletableau(1.1).Lacomparaisonestétabliepourmettreenrelief l’intérêtd’adopterunemachineàaimantsà flux transverse (MAFT)devantdesmachinesdites classiques. L’étude semble montrer que ce type de topologie présente un fort couplemassiqueetvolumique.
Tableau1.1:Comparaisondestopologiesdemoteurs20MW*180tr/mn==;;??>>
Typedemoteur MAS MSRB MSAPàfluxradial MAFTNombredepôles 16 16 60 150Aimants Nd*Fe*B Nd*Fe*BFréquence(Hz) ≈24 24 90 225Nombredephases 2×3 2×3 2×3 8Rendement(%) 97,2 97 98,2 98,6Facteurdepuissance 0.87 0.95 0.9 0.6Longueurtotale(m) 3.5 3.6 2.9 2.6Diamètreexterne(m) 3.68 3.68 3.36 2.6Poidstotal(Tonne) 80 100 50 40Refroidissement air air air eau
Dans la même optique, une comparaison similaire est faite pour des moteurs de 20MW,
dimensionnéspourdeuxvitessesnominalesdistinctes,200 tr/min (tableau (1.2))et180 tr/min(tableau(1.3)),soulignantl’intérêtd’adopterunautretypedemoteuràaimantspermanents,enl’occurrencelesmoteursàaimantspermanentsàfluxaxial(MAFA).
A travers les différentes comparaisons, on se rend compte que les machines à aimantspermanentsontunencombrementetunpoidsplusfaibles.Eneffet,Parrapportàlamachineàrotor bobiné, on constate que les machines à flux transverse et à flux axial ont un gaind’encombrementvariantentre40et50%,alorsquelegainenpoidsvariede50%à60%(pourlaMAFT). Lamachine à aimants permanents et la machine asynchrone «améliorée» présentent

CHAPITREI:GENERALITES
14
quasimentlemêmegainenencombrementdel’ordrede30%à40%etungainenpoidsde25%à30%comparéesauxmachinesàrotorbobiné.
Tableau1.2:Comparaisondedifférentestopologiesdemoteurs20MW*200tr/min==;;77>>Typedemoteur MCC MSRB MSAPàfluxradial MAFALongueurutile(m) 1.7 1.7 1.8 1.5Diamètreexterne(m) 4 4 3.6 2.85Poidstotal(Tonnes) 120 115 85 55
Tableau1.3:Comparaisondedeuxtopologiesdemoteurs20MW*180tr/min==;;77>>
Typedemoteur MSRB MAFALongueurutile(m) 3.6 2.5Diamètreexterne(m) 5.6 2.5
Au regard des différentes études, la finalité est de concevoir des moteurs à faible
encombrement, la figure (1.13) illustre parfaitement les prévisions du gain en encombrementselon lastructureadoptée. Eneffet,à trèscourtterme,ontablepourunencombrementde lamachine asynchrone identique à celui de la machine à aimants permanents à flux radial.Parallèlement, on envisage de réduire l’écart qui existe entre les deux machines citées et lesmachines à flux axial et transverse. À long terme, on prédit l’utilisation des machines à fluxtransverse et des machines supraconductrices à haute température (HTS) à très faibleencombrement.
Aujourd’hui, les structures éprouvées qui permettent de remplacer à brève échéance, lamachinesynchroneàrotorbobinésontbienlamachineàaimantspermanentsàfluxradialetlamachineasynchrone.
1
Figure1.13:Prévisiondel’encombrementdesmoteurspourlapropulsionnavale
;*@* #5!5!!Les performances des machines électriques sont fortement liées aux caractéristiques des
matériauxquiysontemployés.L’évolutiondecesmatériaux,notammentlesaimantspermanentset lesmatériaux ferromagnétiques, a contribuéà l’améliorationdesperformancesdesmachinesélectriques. Dans ce qui suit, les propriétés de différents types d’aimants permanents et dematériauxferromagnétiquesainsiqueleursapplicationssontprésentées.

CHAPITREI:GENERALITES
15
;;**@@**;;** #Lesaimantspermanentssontprincipalementcaractériséspar leurscyclesd’hystérésisetplus
particulièrement par la courbe de désaimantation du deuxième quadrant du plan B*H (figure(1.14)).Cettecourbeestcaractériséepar:
*l’inductionrémanente rB * le champ coercitif cBH , qui est le champ démagnétisant annulant l’induction; plus savaleurestélevéeetplusl’aimanteststable,
*leproduitd’énergievolumique max)(BH *lesvaleurs mB et mH dupointdefonctionnementoptimalMcorrespondantà max)(BH .*l’aimantation cJH ,champcoercitifquiannulel’aimantationintrinsèquedumatériau.
rB
mB
mH
max)(BH
M
cBH
Figure1.14:Illustrationd’unecourbeB*HdesaimantsLapremièreutilisationdesaimantsfutvraisemblablementenchineenl’an4000AvantJésus
Christ en saqualitéde compaspour indiquer au voyageur la route (figure 1.15.a) oupourdescérémoniesreligieuses(figure1.15.b).Depuisunsiècle,l’utilisationdenouveauxtypesd’aimantset l’amélioration de leurs performances, notamment en terme de densité volumique d’énergie(figure(1.16)),ontpermisdetrouverdenouvellesapplications.Lafigure(1.17)montrecertainesdecesapplications,enparticulier,lesmachinesélectriquesdehautesperformances.
(a) (b)Figure1.15:Ancienscompaschinois(hhttttpp::////lliibbrraarryy..tthhiinnkkqquueesstt..oorrgg)

CHAPITREI:GENERALITES
16
Figure1.16:Développementdel’énergiespécifiquedesaimantsaucoursdu20èmesiècle
(wwwwww..vvaaccuuuummsscchhmmeellzzee..ddee )
(a)Rotord’unservomoteur (b)disquedurd’unordinateur
Figure1.17:Exempled’utilisationdesaimants
Lechoixdelanaturedesaimantsd’unemachineàaimantsauneinfluencenonnégligeablesur
soncouplemassique.Lescaractéristiquesdeprincipauxtypesd’aimantsutilisésdanslesmachinesélectriquessontdonnéesci*après.
Lessontdesalliagesàbasede fer,d’aluminiumetdenickel,avecdesadditionsdecobalt,cuivreoudetitane.Ilspeuventêtreisotropesouanisotropes.Ontrouvedesaimantsayantuneinductionrémanente rB avoisinant0.7Tpourlesisotropeset1.2Tpourlesanisotropes,avecunevaleurfaibleduchampcoercitifdel’aimantation( cJH )variantde40à80A/m(figure1.16*

CHAPITREI:GENERALITES
17
a)etuneénergiespécifiqueallantde10à18kJ/m3.L’améliorationdelacoercitivitépeutsefaireàl’aideduNiobium.
Lessontdescomposésd’oxydedefer,debaryumetdestrontium.Ilssontobtenuspar frittage etpeuvent être isotropesou anisotropes.Ces aimantspossèdentdesperformancesmodestesmaissesontimposésdansdetrèsnombreusesapplicationsenraisondeleurfaibleprixde revient et d’une rigiditémagnétique élevée.En raison de leurs faibles valeurs d’aimantationrémanente (environ 0.4T, figure 1.18), les ferrites sont utilisées plutôt dans desmachines àaimantsde faiblepuissanceà faible coût.Pouratteindredescouplesmassiquesplusélevés, lesstructuresdemachinepluscomplexesàconcentrationdefluxpourraientêtreenvisagées.
Les tels que les(% et les! $+ sont beaucoupplusperformantsentermededensitévolumiqued’énergiequelesautrestyped’aimants(figure1.18). Les (% autorisent une température de fonctionnement élevée (jusqu’à350°C), mais ils sont très coûteux en raison notamment de la présence du cobalt dans leurcomposition.Deplus,lecobaltestinterditdanscertainsdomaines(automobilenotamment)pourdes raisons de normes environnementales. Les ! $+ (NdFeB) ont desperformancessupérieuresauxSamariumCobaltetsontbeaucoupmoinscoûteuxmaisleurtenueentempératureestmoinsbonne(jusqu’à160°C).
La figure (1.18.a) présenteuneclassificationdes typesd’aimants en fonctionde leur champcoercitifdel’aimantation cjH etdeleurénergievolumique ( )maxBH etlafigure(1.18.b)présente
la caractéristique )(HB de certains types d’aimants.En fonction de l’application, on choisit lanature des aimants utilisés dans les machines électriques: pour des applications à hautetempérature,lesaimantsSamarium*Cobaltsontutilisés.Danslesmachinesàpuissancesélevées,compte tenu du volumed’aimants utilisé et le coût associé, on préfère d’employer les aimantsNéodyme*Fer*Bore(Nd*Fe*B).Danslecadredenotretravail,unenuancedecetyped’aimantestemployéedanslesmachinesàaimantsétudiées.
(a)Energievolumique (b)Caractéristiquedesaimants
Figure1.18:Aimantsenfonctiondeleurspropriétés==8888>>
;;**@@**<<** !5D!Lesmachinesélectriquessontsoumisesdanslaplupartdescasàdeschampsalternatifs.Afin
de limiter les pertes dues aux courants de Foucault, on utilise généralement les alliages

CHAPITREI:GENERALITES
18
magnétiques sous forme de tôles isolées. Le choix des alliages prend en compte les aspectstechniques,maiségalementdesconsidérationséconomiques.Notonsquesurlabasedeferdontlafaiblerésistivité (10*7`.m)conduitàdespertestrèsélevéesenrégimealternatif, l’objectifdesalliagesdéveloppésestavanttoutd’accroîtreparadditionsdecomposéscetterésistivité toutenconservantunniveaud’inductiondesaturationélevé.Troisfamillesd’alliagesontpercélemarchédesmatériauxlaminés:lesalliagesFer*Silicium,lesalliagesFer*CobaltetlesalliagesFer*Nickel.
Le$(estsansnuldoutel’alliageleplusrépandudansledomainedelaconversionde l’énergie. L’ajout de Silicium à taux inférieur dans tous les cas à 3% apporte outre desperformances magnétiques accrues (polarisation, température de curie), une rigidité justenécessairen’affectantpaslafacilitéd’usinageetlamanutentiondestôles.Deparsesvolumesdeproductionetsonancienneté,l’alliageFer*Siliciumabénéficiédesplusfortsdéveloppementsenrechercheetprocessusdefabrication==88>>==8888>>,avec,ladéfinitiondedeuxcatégoriesdistinctesquisepartagentsanstropdeconcurrencelesmarchés:lestôlesàgrainsnonorientésetlestôlesàgrainsorientés.Prédominantessurlemarché,lestôlesàgrainsnonorientésoffrentunpaneltrèslargedeproduitsàépaisseuretàniveaudesaturationvariables.Guidésparlanécessitéde limiter les pertes au sein de la structure de conversion, les pertes massiques constituenttoujours un critère sélectif prépondérant.De ce fait, les constructeurs ont effectué des effortsconsidérables pour proposer, entre autres, des tôles à très faible épaisseur et faibles pertesmassiques. Cependant si les pertes massiques restent acceptables à faible fréquence, ellesdeviennent prohibitives lorsque la fréquence augmente. Certains industriels comme Arcelorproposent récemmentde tôles spécifiquementdestinées àdes fréquencesplus élevées (400Hz)rencontrées, notamment, en aéronautique, combinant saturation élevée et faibles pertesmassiques.Leprixdecestôlesdefaibleépaisseur(0.2mm)estnaturellementenadéquationavecl’augmentationdesperformances==>>==8888>>.D’unpointdevueassemblage,lestôlesàfaiblesépaisseurscompliquentl’empilagedestôles.
De production inférieure à celle des tôles à grains non orientés, les tôles à grains orientésprivilégient la direction de laminage comme direction de facile aimantation, ce qui lesdestinentàdesstructuresdeconversiondanslesquelles letubedefluxgardeunedirectionfixe(transformateurs).Ceci étant, sesniveauxde saturation élevés (2T) les rendent aussi attractivespourcertainesmachinestournantes.Demanièregénérale,lesfigures(1.19)et(1.20)montrentleniveaudesaturationetlespertestotalesmassiquesdesalliagesFe*Siexistantdanslemarché.
Figure1.19:InductiondesaturationdesalliagesFe*Sisousunchampde10000A/m
3http://www.Arcelor.fr

CHAPITREI:GENERALITES
19
Figure1.20:PertesmassiquesdesalliagesFe*Sisousunefréquencede50Hz(à1.5T)
D’unpointde vue électromagnétique, les alliages$% offrent les caractéristiques les
plus attractives. Pour un taux de cobalt variant de 25 à 30%, cet alliage présente le plus hautniveaudesaturation (2.34T)pouruneperméabilité relativecompriseentre1000et8000.Bienquesespertes/kgsoientsupérieuresàcellesdesalliagesFer*Silicium,sarésistanceàlachaleurenfait le produit phare pour des applications à contraintes ambiantes sévères, application qui, enraisonduprixdecestôlesnerelèventpascependantdelagrandesérie.Ellessecantonnentdonc,dans le domaine des machines tournantes, à des applications aéronautiques, ferroviaires oumilitaires==88??>>.
Lesalliages$FsontconçussurdestauxdechargeenNickelvariantde36%à80%.Leurstructure leurconfèreunegrandefacilitéde laminageàfroidetdetraitementsthermiquesqui permettent de développer leurs propriétésmagnétiques (polarisation, température de curie,perméabilité) au mieux ==88??>>.Dans le contexte des machines tournantes fonctionnant à hautevitesse, les tôles Fer*Nickel, dont les performances globales paraissent attrayantes, restent enretrait car les caractéristiques haute perméabilité et faibles pertes sont inconciliables pour unmêmetauxdeNickel.Leurprixlesorienteversdesapplicationsspécialiséesoùsouventonmeten oeuvre non seulement leurs propriétés magnétiques remarquables, mais également despropriétéscomplémentairestellesquelafaibledilatationetlafacilitédemiseenforme==88??>>.Dansde nombreux cas, on préfère utiliser les alliages Fer*Nickel à 48% de Ni dont les constantesélectromagnétiques(températuredecurie,perméabilité)sontmieuxadaptées.Onutilisesouventces alliages pour l’électrotechnique miniaturisée (téléphonie, appareils de mesure, composantsinductifsdansl’électroniquedepuissance).
Un autre matériau dit # D! 5 ou SMC en Anglais (Soft MagneticCompound) a fait son apparition dans lesmachines électriques.Destiné à des applications dehautes fréquences, cematériau est constitué de particules de poudre de fer enrobées de finescouches isolantes ==88??>>.Cespropriétésélectromagnétiquesetmécaniquesdépendentdu typedepoudre et du processus de fabrication. D’un point de vue économique, les processus defabrication de ce type de composite compte moins d’étapes que celles nécessaires pour lesmatériauxlaminés.LedéveloppementdesSMCs’orienteparallèlementversunediminutiondespertesmassiques. Par ailleurs, la bonne conductivité thermique alliée à un transfert de chaleurtridimensionnellaissesuggérerquemêmesilespertessontsignificativesàfaiblefréquence,ellessontnéanmoinsmieuxrépartiesetmieuxdissipées.Soulignonstoutefois,larelativefaiblessedesSMC au niveau de l’induction de saturation et de l’élasticité (aspectmécanique), comparé auxalliages.ÀdesfréquencesendessousdequelquescentainesdeHertz(endessousde400Hz),lespertesdanscetypedematériausonttrèsimportantescomparéesacellesdesmatériauxclassiques,mais la tendance s’inverse lorsque les fréquences dépassent le kilohertz, la pente de la

CHAPITREI:GENERALITES
20
caractéristiquedespertesmassiquedansleSMCétantlégèrementinférieureàcellesdesmatériauxlaminés.
Les figures (1.21) et (1.22) montrent l’évolution des pertes de plusieurs matériaux decommerce (pour différents alliages) respectivement en fonction de l’induction crête et de lafréquence. La figure (1.21) indique qu’à 50 Hz, le SMC (Somaloy 500) présente les pertesmassiques les plus importantes comparés aux alliages Fer*Silicium (M235*35A, M400*50A,M1000*100A) et Fer*Cobalt (Metglas 2605C et Permendur). La pente d’évolution des pertesmassiques dumatériau SMC reste relativement linéaire en fonction de la fréquence, alors quecelleduFe*Siévoluedemanière«exponentielle»àhautefréquence,commelemontrelafigure(1.22).
Figure1.21:Pertesmassiquesdedifférentsmatériauxà50Hzenfonctionde maxB ==<<??>>
Figure1.22:Pertesmassiquesdedifférentsmatériauxenfonctiondelafréquence==<<??>>
Pour les besoins de notre étude, des tôles à base d'un alliageFer*Silicium suffisent pour le
circuitmagnétiquedumoteur,carilpermetd’allieruncoûtrelativementbasetdesperformancessuffisantes.

CHAPITREI:GENERALITES
21
;*A* #D9#Dans la topologie des convertisseurs, assurant l’alimentation à fréquence variable des
machines à courant alternatif, on peut citer trois configurations disponibles et utilisées dans lapropulsionmarine(figure(1.23)):
92 Les cycloconvertisseurs sont des convertisseurs de type alternatif*alternatif à commutation naturelle, qui transforment une tension alternative d’amplitude et defréquencefixesenunetensiond’amplitudeetdefréquencevariables.Ilspeuventêtreassociésàunmoteurasynchroneousynchrone.Toutefois,danslapropulsionmarine,l’associationavecunmoteursynchroneestpréféréeenraisondesonaptitudeàfournirunentreferimportantsansêtrepénalisépardescourantsmagnétisantsanormalementélevés.L’avantagedesmachinesalimentéespar des cycloconvertisseurs est leur fort couple à basse vitesse avec de faibles pulsations decouplecôtémoteuretuneexcellenteperformancedynamiqueencoupleetvitesse.Cettesolutionsemble particulièrement adaptée aux navires brise*glace.Ce type de convertisseur est toutefoisplus contraignant, puisqu’il a, entre autres, l’inconvénient d’envoyer vers le réseau, desharmoniquesdefréquencesvariablesdifficilementfiltrables.
( 9:Lessynchroconvertisseurs(commutateursdecourantouonduleursdecourant)sontdesconvertisseursdetypecontinu*alternatif,àcommutationnaturelle, ilssontplusparticulièrementassociésàunmoteursynchrone.Cetteassociationestactuellementlaplusrépandue dans la propulsion de grandes puissances de paquebots et de cargos. Outre lesavantages de performances dynamiques, ces convertisseurs ont l’avantage d’utiliser moins dethyristorsquelescycloconvertisseurs,d’oùunencombrement,unpoidsetuncoûtmoindre.Parailleurs, ils polluent moins le réseau en terme d’harmoniques. De plus, les fréquences desharmoniques injectés aux réseaux sont proportionnelles à la fréquence fixe du réseau et doncfacilementidentifiablesetfiltrables.Soninconvénientrésidenotamment,danslesondulationsducoupleàbassevitesse,quipeuventêtreréduitesviaunlissageactifducouple.
: Les onduleurs de tension commandés en MLI sont desconvertisseurs de type continu*alternatif, à commutation forcée, ils peuvent être associés à lamachine synchroneou asynchrone.Aujourd’hui, cette association est laplus indiquée.Ce typed’onduleur a la particularité d’avoir une très bonne réponse dynamique, avec un faible niveaud’ondulationdecouple.Denosjours,c’estletypedeconvertisseurleplusconvoitéenraisondel’amélioration apportée sur les composants électroniques et les innovations apportées sur lestopologiesdeconvertisseurstelsquelesonduleursmulti*niveaux..
Synchro-convertisseurs
Convertisseur à MLI
Type de commutation
Cycloconvertisseurs
Moteurs associés
Moteur asynchroneMoteur synchrone
Moteur synchrone
Moteur asynchroneMoteur synchrone
Naturelle
Naturelle
Forcée
Figure1.23:Principaletopologiesdeconvertisseursalternatifspourlapropulsion

CHAPITREI:GENERALITES
22
Dansl'étatactueldelatechnologie,lesprincipauxcomposantsutilisésdanslesconvertisseurssontlestransistorsMOSFET,lestransistorsIGBT,lesIGCTetlesGTO,parordrecroissantdepuissancecommutableetdécroissantdefréquence.
Les GTO ont la particularité de commuter de très fortes puissances. Toutefois, lesperformancesdynamiquessontfaibles,uncircuitd’aideàlacommutation(CALC)estnécessairepour atténuer les surtensions et les surintensités. La position dominante des GTO dans lesapplicationsdefortespuissancesestrattrapéeparcelledesIGBTquiprésentententreautres,unefréquence de commutation élevée et ne nécessitent pas de circuit d’aide à la commutation.Cependant les pertes par conduction sont plus importantes. Les IGBT ont fait l’objetd’incessantes améliorations, pour exemple, on trouve dans lemarché des IGBT bloquant destensionsde3.3kVetadmettantdescourantsdepassagede1200A==##??>>== %%@@>>..
Des efforts ont été fait pour améliorer les performances des GTO, ce qui a abouti à unélémentàcommandeintégréeappeléIGCT(IntegratedGateCommutatedThyristor)quisesitueàmichemindesGTOetdesIGBTentermedeperformances==88@@>>.Lesexcellentespropriétésàl’étatpassant,demêmequelespossibilitésdesurchargefontdecetélémentuncandidatsûrpourla réalisation des grandes puissances (IGCT de 4500V/4000A à 5500V/1800A). Dans cescomposants,ons’affranchitdesCALC(notammentceluiatténuantlesdV/dt),cequiaméliorelafréquencedecommutationetréduitl’encombrement.
Lafigure(1.24)montrelagammedepuissancedisponiblesurlemarché.
Figure1.24:Gammedepuissancedessemi*conducteurscommercialementdisponible==88AA>>
Depuisplusd’unedécennie==8866>>==88BB>>,destechniquesdeconversionsmulti*niveauxpermettent
de s’affranchirdesproblèmes liés à la limitemaximalede la tensiondeblocagedesprincipauxsemi*conducteurs de puissance. Basés sur le principe d’une combinaison parallèle/série descomposants de puissance, les convertisseurs multi*niveaux assurent une alimentation hautetension des actionneurs électriques de moyenne et forte puissance. En outre, elles offrentl’avantaged’obtenirunspectredetensionetdecourantd’unemeilleurequalité,cequisetraduit par de faibles ondulations de couple et de faibles pertes dues aux harmoniques decourant.
4http://www.Eupec.com5http://www.Mitsubishi.com

CHAPITREI:GENERALITES
23
U1+
U1-
V 1+
V1-
W1+
W1 -
W2-V 2-U 2-
U 2+V2+ W2 +
U 3+
U3- V 3-
V3+ W3 +
W3 -
E
2E/3
E/3
Figure1.25:Structuredeconvertisseursmulti*niveauxàcellulesimbriquées(4niveaux)
Lafigure(1.25)montreunestructured’onduleurà4niveaux.Ondéfinitlenombredeniveaux
d’unetellestructureparlenombredeniveauxdetensiondifférentsqu’ilestpossibled’obtenirsurunephaseduconvertisseur.Ilestdéterminépar ! "#
Dansl’exempleprésentéci*dessus,3IGBTsontensériesurun½bras,ilyadonc4niveauxdetensionensortiedechaquephase:0,E/32E/3etE;sachantqueEestlatensiondubuscontinu.
De tels niveaux de tensions sont possibles, grâce à 3 capacités dites«flottantes» par bras,chacuneestchargéesousunetensiondeE/3,2E/3ouEdesortequechaqueinterrupteurIGBTn’a à supporter qu’une tension réduite de 1/3 de la tension de bus continu. En effet cescomposantsmalgré leurspropriétésdecommutation trèsattrayantessont limitéspar la tensionmaximalequ’ilspeuventsupporter.
Ainsi en augmentant le nombre de niveaux de la structure, on peut augmenter la tensiond’alimentation du pont et donc contrôler des applications de plus fortes puissances. La figure(1.26) montre les formes d’onde de la tension entre phases obtenues respectivement par unonduleur à deux niveaux et un onduleur à 4 niveaux; cette dernière est plus proche d’unesinusoïdeetparconséquentsonspectreestdemeilleurequalité.
0 0.005 0.01 0.015 0.02-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Temps en secondes
V/E
d
TENSION ENTRE PHASES
0 0.005 0.01 0.015 0.02-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Temps en secondes
V/E
d
TENSION ENTRE PHASES
(a)Onduleurà2niveaux (b)Onduleurà4niveaux
Figure1.26:Formesdetensionobtenuespardifférentesstructures==88CC>>

CHAPITREI:GENERALITES
24
Unautreaspectintéressantestque,quelquesoitlenombredeniveauxadopté,onnesacrifie
paspourautantlecaractèremodulairedelastructureetdoncungainentermed’encombrementet d’économie. L’idée de base, comme le montre la figure (1.27), consiste à séparer lescondensateursflottants,etdelesassocierchacunàunmoduledebase.
La modularité ainsi obtenue constitue un avantage industriel indéniable, tant pour leconstructeur que pour le client. Chaque structure élémentaire d’un onduleur, se présente sousforme de tiroir (. figure 1.28). L’armoire onduleur complète est obtenue par assemblage desmodules(outiroirs).
Ed
IGBTIGBT
IGBTIGBT
IGBTIGBT
.
Figure1.27:Réalisationd’unbras(phase)4niveaux,séparationen3modules==88CC>>
ModuleArmoire
Figure1.28:Armoired’unonduleuràIGBT(3,3kV*4,6MVA)==88CC>>
Il existe d’autres topologies d’onduleursmulti*niveaux, on peut citer au côté de l’onduleur
multiniveauxàcellulesimbriquées==8866>>(figure1.29.b),lesonduleursàpotentielsdistribuésou

CHAPITREI:GENERALITES
25
NPC(NeutralPointClamped)(figure1.29.a)==88BB>>etlesonduleursàconvertisseurscascadés(figure1.29.c)==??77>>==??;;>>.
Lesonduleursàcellules imbriquées (oumulticellulaires),permettentdemanièrenaturelleunéquilibragedestensionsdescondensateursflottantssansrégulationetmesuredetensions ==88CC>>.Parailleurs,lescellulesétanttotalementindépendantes,ellesoffrentlaparticularitédejouersurun degré de liberté supplémentaire, en particulier le déphasage. Ainsi, certaines stratégies decommande peuvent utiliser ce déphasage pour décaler légèrement les commandes des deuxcellulesetéviterlasommationdesdV/dtdecommutation==8866>>.
Dans les onduleurs à potentiels distribués, des diodes connectées aux points milieux dessources de tension protègent les interrupteurs externes contre des tensions excessives. Cettetopologie nécessite un contrôle rigoureux des tensions de chaque condensateur et l’équilibragedes tensions devient complexe au delà de trois niveaux ==??<<>>. De plus, le nombre de diodesaugmentetrèsrapidementaveclenombredeniveaux.
L’onduleuràconvertisseurs«cascadés»estbasésurlamiseenséried’onduleursmonophasés(enpontenH)etchaquepontestalimentéparunesourcedetensionindépendanteisolée.Outrel’avantage d’assurer un équilibrage naturel des tensions, cette structure permet d’alimenter unechargedemoyenneouhautetensionàpartirdeplusieurssourcesbassetension.Ondevinequedanscettetopologie,ilestnécessairededisposerd’autantdesourcequedepontsmisencascade==??<<>>.
(a) (b) (c) Figure1.29:Topologiesclassiquesd’onduleursmulti*niveaux==??88>>
;*6* $%! :Pourmaintenir le bateau en fonctionnement sécurisé, et pour laisser le temps à l’équipage
d’identifierledéfaut,lesystèmedoitêtreconçupourgérerlespremièresopérationsd’urgenceparlui*même, sans action de l’opérateur. Cela signifie que le système doit automatiquement sepositionnerenmodedégradé, enmettant àdispositionde lapropulsion lapuissancemaximalepossible.
Si un défaut se produit sur l’un des équipements du circuit (transformateur, disjoncteur,convertisseur ou câble), le système de protection doit pouvoir placer automatiquement lapropulsionenmode«demi*moteur»;ainsi,plusde50%ducoupleresteencoredisponiblesurl’hélice. Dans cette optique, la redondance et lamodularité des systèmes est «quasi*massive»danslapropulsionmarineparPOD(figure(1.30)).Eneffet,oncomprendmieuxlenombredePODdansunnavire,lacompacité(réductionducâblage)etlamodularité(armoireà«tiroirs»)desconvertisseurs.

CHAPITREI:GENERALITES
26
Figure1.30:Exempled’uneconfigurationgénérationdepuissance*systèmedePropulsion
Demême,onpeutenvisagerd’alimenterlesmoteurstriphaséspardeuxonduleursconnectésà
deuxsourcescontinuesisoléesélectriquement,commel’indiquelafigure(1.31).Chaquephaseestconnectéedepartetd’autreàunbrasdechaqueonduleur,desortequesil’undesonduleursesten panne, on peut «basculer» le fonctionnement sur un seul onduleur en connectant lesbobinagesdelamachineenétoiles.
MoteurOnduleur Onduleur
Figure1.31:Associationconvertisseurs*moteur
;*B* 5D)###Habituellement,lorsquel’oneffectueundimensionnementd’unemachineélectriquepourune
application donnée, elle doit répondre à des exigences de performances et des contraintespréalablementdéfinies.Ainsipourl’applicationparPOD,lesprincipalescontraintessont:
• )%L’encombrementestl’undesaspectsinhérentàlapropulsionparPOD,eneffet,ilestétabli
quelerendementhydrodynamiqueestliéaurapportdudiamètredel’héliceaudiamètredubulbedans lequel est placé le moteur (figure 1.32). Dans cette optique, à diamètre d’hélice fixe, lediamètreexternedelamachineconditionneceluidubulbe.Desmodificationsdel’architectureetdesformesdunavirepeuventaméliorerlerendementpropulsifglobal.Unecarènebiendessinée,un bulbe bien dimensionné et une hélice bien adaptée peuvent considérablement diminuer larésistanceàl’avancementdunavireetdoncaméliorerlebilanénergétiquedunavire.

CHAPITREI:GENERALITES
27
Dia
mèt
re d
’hél
ice
(a)Illustrationdubulbe/hélice (b)Facteurcorrectif==((((AA>>
Figure1.32:Facteurcorrectifdurendementhydrodynamiqueenfonctiondurapportdesdiamètresdubulbeetdel’hélice
• #!Unemauvaise évacuation des pertes, augmente l’échauffement de lamachinemais diminue
aussi sonrendement.Àceteffet,dans lapropulsionparPODonadoptesouventunmodederefroidissementforcé(motoventilé),permettantdemaintenirundébitd’airrelativementconstantcombinéà l’introductiondecanauxetd’éventsd’aération,permettantunemeilleureévacuationdescalories.La figure (1.33)présenteunexempledesystèmedeventilationdans lapropulsionparPOD.
Figure1.33:ExempledesystèmedeventilationdanslapropulsionparPOD==++++>>
• #
Labonne identificationetprédictiondespertespermettent à la foisd’évaluer correctement leséchauffementsmaisaussidemieuxappréhenderlesmoyensdeminimisercespertes.Danscettelogique,untravailestfaitpourréduirelesharmoniquesd’espacesmaisaussidetemps,sourcesdepertessupplémentaires.Lafigure(1.34)répertorielesprincipalespertespouvantexisterdansles
6http://www.marine*solutions.de

CHAPITREI:GENERALITES
28
machines asynchrones et à aimants permanents et énumère les moyens d’action pour leurminimisation.Ainsi,pour la réductiondecespertesonpeutagir sur ledimensionnementde lamachine(typedebobinage,nombred’encoches,entrefer,polarité…)maisaussisurlevariateur(modedecommande,topologiedeconvertisseur,fréquencededécoupage…).
Pertes Joule statoriques
Pertes Joule rotoriques
Pertes dues aux
harmoniques d’espace
Pertes dues aux
harmoniques de temps
Pertes fer statoriques
Pertes dans les aimants
Pertes supplémentaires
PolaritéType de
bobinage
Nombre d’encoches statoriques
Nombre d’encoches rotoriques
Épanouissement des aimants
Ségmentation des aimants
entreferType de variateur
Type de matériau
Dimensions géométriques
Figure1.34:Moyensd’actionspourlaminimisationdesprincipalespertesdanslesmachines
asynchronesetàaimantspermanents
• /%Lesvibrationssontdeseffetsindésirablesquiinduisentunefatigueprématuréedescomposantsdelamachineetdesrisquesdedysfonctionnement,maisaussiunegêneauditivequ’ilfautréduireetpourcelailestnécessaired’identifierlessourcesdevibrationsainsiquelesmoyenspermettantderéduirecesphénomènes.Lafigure(1.34)illustrelessourcesdevibrationsetdebruitainsiquelesdifférentsmoyensd’actionpourleurminimisation.Soulignons,quelaplupartdesmoyensderéductionsdesvibrationssontquasisimilairesàceuxpermettantderéduirelespertes.Parailleurs,en étudiant les différentes gammes de fréquences émises, les chercheurs sont parvenus à lesrépertorier en fonction du confort acoustique ou de la gêne occasionnées. Ces donnéescontribuentdésormaisàlaconceptiondesélémentsmécaniquesexternedesmoteurs.

CHAPITREI:GENERALITES
29
Polarité
Type de bobinage
Nombre d’encoches statoriques Nombre
d’encoches rotoriques
Épanouissement des aimants
Ségmentation des aimantsentrefer
Type de variateur
Type de matériau
Dimensions géométriques
- Harmoniques de FMM- Harmoniques de perméance- Harmoniques du variateur- Harmoniques de saturation- Harmoniques d’éccentricité
- Forces de ventilation- Mouvement de palier
- Couples parasites/couple de détente- Bruits
- Couple pulsatoire- Forces radiales
Sources magnétiques
Sources mécaniques
Effets
Dimensions mécaniques
Figure1.35:Sourcesdevibrationetlesmoyensd’actionpourleurminimisation
• LaparticularitédesstructuresparPODestlescontraintesdetenueauchocquiimposentun
entreferminimum. En effet, en dehors des conséquences sur le dimensionnement des partiesmécaniques de la machine (arbre, paliers,…), de telles contraintes influent sur le choixélectromagnétiquedumoteur.Danslecasdelamachineàaimantspermanents,cetteaspectn’estpas contraignant puisque l’un des intérêtmêmede ce genre demoteur est d’avoir un entreferimportant.Parcontreauniveaudesmoteursasynchrones,l’augmentationdel’entreferaffecteàlafoislerendementetlefacteurdepuissanceetpeutengendrerunsurdimensionnementdumoteuret du convertisseur (par rapport à une machine asynchrone de même performance sanscontrainted’entreferimportant).
• GBien que secondaire dans ce genre d’étude, il est toutefois important de garder à l’esprit
l’aspect économique. L’action sur certains paramètres tel que le nombre de pôles, permet deréduirelevolumedeculassemaisaussilestêtedebobines(etdoncmassedecuivre).Parailleursunnombred’encochesréduitesaustatorpermetderéduirelescoûtsdefabrication(miseenplacedebobines).Certains typesdematériaux (pour les carcasses et les aimants)présententunbonrapportperformances/coût.
;*C* !5#)##!!Notre étude est consacrée à la comparaison des performances d’une machine asynchrone«poussée» et d’une machine à aimants permanents relativement bien dimensionnée pour lamotorisationdesPOD.Ainsi,pourlamachineàaimantspermanents,vulaquantitéimportanted’aimantsnécessaireàlaréalisationd’unemachined’unetellepuissance,ilestéconomiquementrecommandéd’utiliserdesaimantsde typeNdFeB,depluspour l’applicationvisée, il estnécessaireque lemoteurpuissefourniruncoupleutiledonnéàunevitessederotationetunetensiond’alimentationfixée.Dans

CHAPITREI:GENERALITES
30
les conditions normales de températures (20°C), les caractéristiques de ces aimants sont lessuivantes: une induction rémanente TBr 22.1= , un champ coercitif m/kAH cB 915= et uneperméabilité relativede 07.1=rmµ .À titred’information,nousprésentons sur la figure (1.36),l’évolutiondescaractéristiques )(HB et )(HJ (polarisationmagnétique HBJ 0µ−= )del’aimantutiliséenfonctiondelatempérature.
Figure1.36:CaractéristiqueB(H)etJ(H)enfonctiondelatempérature
(www.vacuumschmelze.de )
Toujours dans le souci d’assurer un compromis entre le coût et les performances, (moins depertes,bonne tenue thermique) lesmatériauxutiliséspour lescarcasses (culassesetdents) sontdetypeFer*Silicium.Pourlestatorlaminédelamachineàaimants, leM530P50Aestutilisé(matériauàhauteperméabilitéavecdespertesspécifiquesde5.3W/kgà1.5Tet50Hzpouruneépaisseurdetôlede0.5mm),ilenestdemêmepourlamachineasynchrone.Cematériauàuneinduction de saturation élevée, une bonne conductibilité thermique et des pertes massiquesrelativementfaibles,comparéàd’autresmatériauxdemêmeniveaud’inductiondesaturationtelqueleM100065A(figure(1.37)).Par ailleurs, toujours dans le souci de réduire les échauffements. la densité de courant et latempérature admissibles dans les conducteurs statoriques sont considérées comme descontraintessupplémentairescommelemontreletableau(1.4).L’aspect hydrodynamique est implicitement pris en compte lors du dimensionnement de lamachineetc’estdanscettelogiquequelediamètreexterneetlalongueurutilesontfixéscommel’indiqueletableau(1.4).L’exigence de tenue au choc nécessite de définir un entreferminimum tel qu’il est indiqué autableau(1.4).Sur un autre registre, l’onduleur choisi, pour alimenter le moteur, est de type multi niveaux,délivrantunetensionde3000Voltsefficace,avecunefréquencededécoupageauvoisinagede900 Hz. Les moteurs sont alimentés par deux onduleurs connectés à deux sources continuesisoléesélectriquement.

CHAPITREI:GENERALITES
31
Matériaux Fer-silicium
0
0,5
1
1,5
2
2,5
0 20000 40000 60000 80000 100000
H [A/m]
B [
Tesla
]
M 530 P 50 A M1000 65 A
Figure1.37:Caractéristiquedesmatériauxutilisés
Tableau1.4:Principalesperformancesetcontraintes ( (
Tensiondephase sV (Vefficace) 3000 3000Puissanceutile mecP (MW) 6.76 6.76Vitesse n (tr/mn) 170 170Couple moyΓ (kNm) 380 380
Densitédecourant sJ (A/mm²) ≤5 ≤4Pertes minimum minimumCouplepulsatoire minimum minimumTempérature(°C) <140 <120Diamètreexterne eD (m) <2 <2Longueurtotale(fer+évents)(m) 2.5 2.5Entrefer e (mm) ≥4 >4
/ MV7000 MV7000type Tension TensionParticularité Multi*niveaux Multi*niveauxFréquencededécoupage(Hz) ≈900 ≈900
ViaeaudemersurparoisduPOD oui ouiMotoventilé oui oui
Lemoteurestmotoventilé,assurantundébitd’airconstant.Pourassurerlebonrefroidissement,unéventd’aérationtraverseaxialement lemoteuretdescanauxsont judicieusementplacésà lapériphérie radiale de la machine. Pour le moteur asynchrone, des évents sont envisagés auxabordssupérieursdesencoches,celapermetderefroidiràlafoislestêtesdebobinesmaisaussilecuivredansl’encoche.

CHAPITREI:GENERALITES
32
;*;7* Toutau longdecechapitrenousavonspasséen revu lesprincipauxdéveloppementsde la
propulsionélectrique.Dansunpremiertemps,aprèsavoirénumérél’intérêtdelapropulsiontoutélectrique, nous avons souligné l’avantage d’adopter une structure de propulsion en nacelle(POD). Pour les besoins de cette dernière, un bilan des machines électriques susceptibles derépondre aux exigences d’une telle propulsion est établi.Dans ce contexte, des pistes ont étéexploitéesavecplusoumoinsdesuccès.Eneffet,lesmachinesprésentéesontpermisdepréciserbrièvement leurs potentialités en terme de puissance volumiquemais aussi leurs limitations etperspectivesd’évolution.
Résolument abordé en vue d’une application de forte puissance, basse vitesse et faibleencombrement, les machines à aimants permanents montés en surface et les machinesasynchronesàcage,pourleurtechnologieetleurcoûtmaîtrisés,ontétéretenuespourlesbesoinsdel’étudecomparative.
Levoletsuivantduchapitre,rappelsuccinctementlesdifférentstypesd’aimantspermanentsetdematériaux ferromagnétiques ainsi que leurspropriétés.Dans le contextede l’applicationquinousconcerne,lechoixd’unaimantpermanentdetypeNdFeBpourlesmachinesàaimantsetd’unetôleàbasedeFer*Siliciumpermetdepréserverlesperformancessanspourautantsacrifierlecoûtderéalisationdelamachine.
Ce type d’application étant à vitesse variable, l’aspect convertisseur est rapidement abordé.Onyénumèrelesprincipauxconvertisseursutilisésdanslapropulsionélectriqueainsiqueleurspropriétés. L’objectif d’avoir une forme d’onde quasi*sinusoïdale à l’entrée de la machineélectriqueetlesexigencesdefortespuissancesdecertainesapplications,ontpermisl’émergencedenouvellestopologiesdeconvertisseursditsmulti*niveaux.Leursavantagesavérésontfavorisésl’association de convertisseurs multi*niveaux avec les machines électriques dans la propulsionélectrique,cequiestlecasdenotreapplication.
L’undesaspectsinhérentsauxapplicationsembarquées(aéronautique,spatiale,marine)estlafiabilité des systèmes. Le caractère redondant qui se situe quasiment à tous les niveaux, seretrouvedanslemoded’alimentationdelamachinedestinéeàuneapplicationparPOD.L’entréeen lamatière a permis de situer l’application qui concerne cette étudemais aussi demettre lalumièresurlesdifférentsaspectsgravitantautourdelapropulsionparPOD.
Pour ce qui nous concerne, l’étude est principalement axée sur l’aspect dimensionnel de lamachine à aimants permanentsmontés en surface et de lamachine asynchrone à cage. Cetteétude alliant, dimensionnement, analyse et comparaison des performances fera l’objet desprochainschapitres.

''22
(( 33

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
32
<* ' 2 ( ' ( (
<*;* L’étude bibliographique, présentée au chapitre précédent,montre que parmi lesmachines à
topologiesclassiques,lamachinesynchroneàaimantspermanents(MSAP)montéssurlasurfacerotorique et la machine asynchrone à cage d’écureuil sont celles qui s’adaptent mieux à lapropulsion des navires par «POD».Afin de comparer cesmachines il est nécessaire dans unpremiertemps,deconnaîtrelescritèresdecomparaisonetlescontraintespourcetteapplication.En intégrant ces critères et contraintes, on doit ensuite dimensionner chacune de ces deuxmachinespourlamêmeapplication:mêmecouplenominal,mêmevitessenominale,mêmetyped’alimentationetmêmetensiondubuscontinu.
Danscechapitre,nousaborderonsl’approchepréconiséepourmodéliserlamachineàaimantspermanents.Ledimensionnementde lamachineà aimantspermanents est effectué sur labasedes performances requises et les contraintes énumérées dans le tableau (1.4) du chapitreprécédent. Par ailleurs, certains paramètres resterons fixés, tels que la longueur utile uL , et lediamètreexterne eD .
Le principal paramètre géométrique qui sera étudié est le nombre de paires de pôles, soninfluencesurcertainesperformancesestsuccinctementdécritedanslasection(2.2).Pourchaquepolarité,nousétudionsdanscechapitre l’influencedecertainsparamètressur lesperformancesde la machine. Cette étude permet de choisir le type de bobinage et certaines dimensionsgéométriques des aimants et de réduire l’intervalle de variation d’autres paramètresdimensionnant. Les résultats obtenus faciliteront l’analyse des performances et le choix desparamètres de la machine à aimants qui sera comparée en dernier chapitre à deux machinesasynchronesoptimisées.
L’objectifprincipalestdefournirlecouplemoyendésirétoutenminimisantlevolumedelamachineetletauxdesharmoniquesducouple,notammentceuxdebasrang.Commelesaimantssontdisposéssurlasurfacerotorique,onpeutraisonnablementnégligerl’influencedutermedecoupleliéàlasaillancerotorique.Danscesconditions,lecouplecomporteessentiellementdeuxtermes: l’unliéà l’interactiondescourantsstatoriqueset lesaimantsrotoriquesappelé«coupled’interaction», l’autre dû à l’interaction de la denture statorique avec les aimants rotoriqueshabituellementappelé«couplededétente».
La machine à aimants permanents étant en alimentation sinusoïdale, pour réduire lesharmoniquesdu«coupled’interaction»,laformedesaFÉMdoitêtrequasi*sinusoïdale.Pourcefaire, il est nécessaire d’identifier les paramètres géométriques pouvant réduire le contenuharmoniquedelaFÉM.LaformedelaFÉMdépendd’unepartdelaformeetlesdimensionsdesaimants rotoriques et d’autre part du type de bobinage statorique adopté. De plus, pour desraisons de fabrication et de coût, un pôle d’aimant est réalisé par plusieurs blocs d’aimants demême polarité. Cette segmentation des aimants par pôle est considérée comme un autreparamètred’actionsurlaformeducouple.
Dans la section (2.3), en se basant sur le fait que la valeur et la forme du couple sontdirectement liées aux dimensions et à la forme des aimants, nous étudions l’influence de sesparamètresgéométriquessurlavaleurmoyenneducouple.L’undesparamètresleplusinfluantestl’épanouissementdesaimants.Dansunpremiertemps,ensebasantsurl’analysespectraledela forme d’onde de «l’induction d’entrefer», l’intervalle de variation de l’épanouissement estdéfinidemanièreàassurerunbonrapportcouplemoyen/volumed’aimants,engardantàl’espritl’objectif de réduire son contenu harmonique. En suivant la même démarche, nous étudions

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
33
l’influencedunombredeblocsd’aimantsparpôle sur la valeurmoyennedu couple.Toujoursdanslemêmelogique,uneplagedevariationdunombredeblocsd’aimantsparpôleestdéfinie.En ce qui concerne la hauteur des aimants et l’entrefer, ils sont choisis et fixés demanière àpouvoirassureruncoupleutileàdestempératuresdefonctionnementrelativementélevées,maisaussi pour que les aimants ne subissent pas une démagnétisation globale lors d’unfonctionnementanormal(court*circuitparexemple).
La section (2.4) est consacrée aux «couples pulsatoires d’interaction». Pour réduire lesondulations du couple d’interaction, nous devons minimiser le contenu harmonique(principalementdebasrang)delaFÉM.L’influencedel’épanouissementdesaimants,dutypedebobinageetde la segmentationdesaimantssur lecontenuharmoniquede laFÉMestmiseenévidence.Onremarquelapossibilitéd’annulerdeuxharmoniquesdebasrangetlaréductiondecertainsharmoniquesdemoyen rang, sansque lavaleurmoyenneducouple soit sensiblementaffectée.
Lasection(2.5)estaxéesurlaréductiondu«couplededétente».Nousavonsmisenévidencequ’unchoixadaptédunombred’encochesparpairedepôlespermetd’augmenterlapulsationducouple de détente. Pour ce nombre, nous montrons que son amplitude peut êtresignificativement réduite en agissant sur l’épanouissement des aimants et le nombre de blocsd’aimants élémentaires constituant chaque pôle rotorique. Nous avons également étudié laréduction du couple de détente par l’introduction de cales magnétiques dans les isthmesd’encochesstatoriques.
Danscechapitre,pourétudier l’influencede laformedesaimantsrotoriquessur lecontenuharmoniquedelaFÉMetducouplededétente,nousavonsmontréqu’ilestpossibledesebaserrespectivementsur l’analyseharmoniquede la répartitionde l’inductiondans l’entrefer (pour laFÉM) et le carré de l’induction d’entrefer (pour le couple de détente) en considérant le statorlisse.Cetteapprochepermetdechoisirlaformedesaimantsrotoriquespourtouteslesmachinesàaimantsdemêmestructurequellequesoitlapuissanceetlenombredepairesdepôles.
Lasecondepartiedecechapitreestdédiéeàl’analysedesperformancesdelaMSAPpourunesériedepolaritésallantde8pôlesà20pôles,cequiapermitdemettreenrelieflaprédominanced’une polarité pour les performances et contraintes considérées, mais aussi pour les règles dedimensionnement fixées dans la première partie. Une synthèse de dimensionnement y estdégagée.
La section (2.8) compare les résultats de simulation avec certains résultats de mesureseffectuéessurunprototypedemachineàaimantspermanents.Enoutre,l’effetdelatempératuremaisaussid’uncourt*circuittriphasé,surlesperformancesdelamachineetsurlesaimants,estétudié.
Lasection(2.9)détaillelaméthodedecalculdescouplespulsatoires.Pourcefaire,unmodèleélémentsfiniscoupléàunmodèlecircuitestmisenœuvre.Cemodèlepermetdereconstituerlaformed’ondeducourantmaisaussiducoupleentenantencomptedesharmoniquesdetempsissusduconvertisseuretceconnaissant laformed’ondede la tension.Les résultatsdescalculsobtenusparlemodèlesontcomparésavecceuxobtenusparuneméthodedecalculparélémentsfinisentenantcomptedumouvementdurotor==????>>.
Lasection(2.10)quiterminecechapitreestconsacréeàuneétudecomplémentairedestinéeàvérifier lebondimensionnementdelamachineditederéférence(auxdimensionsduprototyperéalisé) avec une machine de même polarité dans laquelle certains paramètres dedimensionnementontétémodifiés.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
34
<*<* ##)#La démarche adoptée pour le dimensionnement des machines synchrones à aimants
permanents,pourl’applicationvisée,consisteàmettreenévidencelesparamètresgéométriquesetleurinfluencesurlecouplemoyen,laFÉMetleurcontenuharmonique.
En effet, pour une machine à aimants non saturée à rotor lisse, le couple moyen estproportionnel à la longueur utile uL , au rayon d’alésage ar , au coefficient de bobinage dufondamental 1bk , au nombre de spires sN par phase, à la valeur efficace sI des courants
sinusoïdauxdephasesetàl’amplitudedufondamentaldel’inductionàvidedansl’entrefer 1eB .
11 essbauem B)INk(rL ⋅⋅∝Γ (II.1)
Lalongueurutile uL estfixéedansnotreapplication;demêmequelerayonextérieurétantfixé, le rayond’alésage seradéduitdeshauteursde laculasseetde ladesdents statoriques.Lahauteurde la culasse statoriqueest fortement liéeauchoixdunombredepairesdepôles et lahauteurdesdents(encoches)statoriquestientcomptedeladensitédecourantautoriséedanslesencoches. Sur le choix de ces paramètres, d’autres considérations liées aux matériauxmagnétiques, le type de bobinage, le mode de refroidissement et les contraintes mécaniques,magnétiquesetthermiquesontdesimpactsnonnégligeables.
Le nombre de spires peut être obtenu connaissant la tension d’alimentation et la plage devariationdurayond’alésage(AnnexeA).Uneplagedevariationducourantpeutêtredéduiteconnaissant la puissancemécanique nécessaire ainsi que la plage du produit rendement par lefacteur de puissance souhaité ( Annexe A). L’induction à vide d’entrefer est liée à la fois àl’épanouissementdesaimantsmaisaussiàlahauteurdesaimantsetl’entrefer.
La démarche d’optimisation consiste alors à étudier l’influence de la polarité sur lesperformancesde lamachine.Eneffet, l’augmentationdunombredepairesdepôles p apourconséquence:
• Laréductionduvolumedesculassesstatoriqueetrotorique(inversementproportionnelsà p )etparconséquentdel’encombrementdelamachine
• Laréductiondeslongueursdestêtesdebobine(inversementproportionnellesà p )etparconséquentdespertesJoulestatoriques.
• Enfixantlediamètreexternedelamachine,l’augmentationdunombredepairedepôles,permet d’augmenter le rayon d’alésage (diminution du volume) et par conséquentd’augmenter le couple utile à courant identique (ou de réduire le courant à coupleidentique).
• La réduction de l’inductance «magnétisante» (inversement proportionnelle à 2p ). En
outre,celaréduitl’intervallededéfluxage(réductiondel’inductancesynchrone).• L’augmentationdunombred’encochesstatoriquesetparconséquentlecoûtdubobinage
statorique(complicationsdefabrication).• L’augmentationde lafréquencedumoteur(enalimentationàfréquencevariable)etpar
conséquent des pertes fer plus importantes par unité du volume des partiesferromagnétiques(augmentationen 2
p près).
Ainsi, le nombre de paires de pôles agit à la fois sur les performances volumiques, lerendement et le coût de la fabrication. Pour cette raison, pour une application donnée(performances et contraintes de dimensionnement imposées), nous proposons d’optimiser une

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
35
machine synchroneàaimantspourchaquenombredepairesdepôles; lenombredepairesdepôlesleplusadaptéseraceluidelamachinelapluscompacte.CettedémarcheestadoptéepourchoisirlenombredepairesdepôlesdelamachineàaimantsdestinéeàlapropulsionparPODd’unnavire.
<*8* #:D!!#
Pour des raisons de coût et de fabrication, plusieurs blocs rectangulaires forment un pôled’aimant (Figure 2.1.b). Bien que l’aimantation d’un bloc soit parallèle, nous pouvons laconsidérercommeglobalementradialesousunpôlelorsquelesdimensionsdechaqueblocsontpetites devant le rayon rotorique. Nous verrons plus loin l’influence de la segmentation desaimantssurlesperformancesdelamachine.
(a)aimantsunissousunpôle (b)aimantssegmentéssousunpôle
Figure2.1:CoupetransversaledesconfigurationsdeMSAPadoptées
L’épanouissementdesaimantssousunpôledoitêtrechoisidemanièreà:
• avoirunniveaud’inductionleplusélevépossibleavecunminimumdevolumed’aimant• réduirelecontenuharmoniquedelaformed’ondedel’inductionàvidedansl’entreferet
doncceluidelaFÉMetducouple.
L’inductionàvidedansdifférentspointsdel’entreferdépendévidemmentdelaformeetlesdimensions des aimants ainsi que de la forme et du nombre des dents statoriques. Dans lesmachines de puissance élevée, la forme des dents statoriques est pratiquement imposée. Unmoyensimpled’influencerlecontenuharmoniquedel’inductionàvidedansl’entreferestd’agirsur lecontenuharmoniquede la«f.m.m»desaimantsaurotor.Pour illustrercettedémarche,nousconsidéronslafigure(2.2),montrantladistributiondesaimantsaurotorainsiquelaformedelaf.m.m.rotorique.LestermesdudéveloppementensériedeFourierdelaf.m.m.(fonction
)(θF )sontdelaforme:
,...3,2 )2/sin(4ˆ
lfondamenta lepour )2/sin(4ˆ
1
==
=
hhpFh
F
pFF
mh
m
απ
απ
(II.2)

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
36
où p est le nombre de paires de pôles, α est l’épanouissement des aimants en degrésmécaniqueset$estl’amplitudedelaf.m.m.(Fig.2.2).
Nouseffectuonsuneétudequalitativede l’influencede l’épanouissementdes aimants sur lecontenuharmoniquedela«f.m.m»desaimants.Sil’onconsidère F devaleurunitaire,lafigure(2.3*a)illustrel’évolutiondestermesdéfinisparl’équation(II2)enfonctiondel’épanouissementdes aimants exprimé en%par rapport au pas polaire.Onpeut aisément délimiter une «zoneutile» où le fondamental de la f.m.m. est grand et où certaines composantes harmoniquess’annulent(voirfigure(2.3*b)).Toutefoisilestimportantd’observerquel’onnepeutpasannulerdeuxcomposantesharmoniquesàlafois.Danscettelogique,onannuleunharmoniquedefaiblerang(5ou7)ouonréduitl’amplitudedeplusieursharmoniquesderangsfaibles.
L’inductiond’entreferestissuedela«f.m.m»desaimantsmoduléeparladenture.Toutefoislenombrededents statoriquesparpairedepôlesétant relativementélevédans lesmachines àfortepuissance,leureffetsurlesharmoniquesdebasrang,fondamentalcompris,estfaible.Ainsi,dans ce paragraphe, nous considérons uniquement l’induction d’entrefer issue des aimantslorsque lestatorest lisse.Cequinouspermetd’étudier l’influencede l’épanouissementetde lasegmentation d’un pôle d’aimant, en plusieurs blocs, sur l’évolution du fondamental del’induction.Pourcefaire,nousavonschoisiuneplaged’étudedel’épanouissementdesaimantsàl’intérieurdelazoneutiledéfiniesurlafigure(2.3)etfaitvarierlenombredeblocsparpôle baN de1à8.
Aimant Aimant
θ m p α
F(θ)
0 π
F1(θ)
Figure2.2:Formed’ondedelaf.m.mdesaimants
ZO
NE
UT
ILE
(a) (b)
Figure2.3:Evolutiondescoefficients hF enfonctiondel’épanouissement
Dans cette analyse, nous nous intéressons à l’amplitude du fondamental de l’inductiond’entreferavecunstatorlisse.Nousavonseffectuéunesériedesimulationsparélémentsfinisen

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
37
imposantlerayond’alésagestatorique,l’épaisseurd’entrefermécaniqueetlahauteurdesaimantsàdesvaleursraisonnablespour l’applicationconsidérée(figure2.4).Aveccettedémarche,nousisolonslephénomènedelasegmentationdesaimantsdeceluideladenturestatorique.Lafigure(2.4) montre l’allure de l’induction d’entrefer pour différentes configurations: pas desegmentation, puis avec segmentation 4et 3,2=baN . Nous constatons la perturbation du«plateau» de l’induction due à la segmentation des aimants. Soulignons que dans les calculseffectués,l’aimantationdesblocsélémentairesd’aimantestsupposéeparallèleetnonpasradiale.
0 50 100 150 200 250 300 350 400-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
=H!>
I=>
0 50 100 150 200 250 300 350 400-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Position rotorique[° électrique]
Indu
ctio
n d'
entr
efer
[T
esla
]
0 50 100 150 200 250 300 350 400-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
=H!>
I=>
0 50 100 150 200 250 300 350 400-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
=H!>I=>
Figure2.4:Formed’ondedel’inductiond’entreferpourdifférentsnombresdeblocsd’aimant.
La figure (2.5) montre l’évolution du fondamental de l’induction 1ˆ
eB en fonction del’épanouissement des aimants et du nombre de blocs par pôles. Elle montre naturellementl’augmentation du niveau d’induction dans l’entrefer avec l’épanouissement. Par ailleurs, onobserveunerelativediminutionduniveaudel’inductionaveclasegmentation.Cettediminutionestmoins importante lorsque lenombredeblocsd’aimantparpôleaugmente (unediminutiond’environ 3.5% pour 4≥baN et d’environ 5.5% pour 2=baN ). Cette situation s’expliquenaturellementparlefaitquel’entrefermoyenestplusimportantpourlesvaleursplusfaiblesdunombredeblocsd’aimant,notammentpour .2=baN
6BB7
B<B?
BABB
C77
<
?
A
B
;*;
;*<
;*8
%
ααααJττττ#=K>
L+;L=>
Figure2.5:Evolutiondufondamentaldel’inductiond’entreferenfonctiondel’ouverture
relatived’aimant( pm τα / )etdunombredeblocsd’aimantsparpôles( baN ).

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
38
Cette première analyse permet demettre en évidence le nombreminimum requis de blocsd’aimantsoffrantunfondamentald’inductiond’entrefer«voisin»deceluiobtenulorsqu’iln’yapas de segmentation ( 4≥baN ).Naturellement, dans les sections suivantes, le nombre de blocsserachoisienayantpourobjectiflaminimisationdesondulationsducouple.La figure (2.6), issue d’un calcul par éléments finis, représente l’évolution des harmoniques del’inductiond’entrefer(statorlisse)enfonctionl’épanouissementdesaimants(pourlecasoùlesaimants ne sont pas segmentés), on observe que les résultats concordent avec ceux présentésdanslafigure(2.3).L’interprétationestdonnéeunpeuplusloindanscechapitre.
agrandissement
Figure2.6:Evolutiondufondamentaletdesharmoniquesdel’inductiond’entreferenfonctiondel’ouverturerelatived’aimant( pm τα / )pour( baN =1).
L’inductiondans l’entreferdépendégalementduchoixde lahauteurdes aimants.L’objectifétant à la fois demaintenir unniveaud’induction relativement élevé et d’éluder tout risquededémagnétisation des aimants lors d’un fonctionnement inhabituel (court*circuit) et/ou à destempératuresélevées.Lechoixdelahauteurdesaimantsestprésentédansl’annexe.
<*?* M#)MOnappellera"coupled’interactionélectromagnétique" le termeducoupledûà l’interaction
descourantsstatoriquesetdesaimantsrotoriques.Ennégligeantl’effetdelasaillancerotorique,le"coupled’interactionélectromagnétique"estproportionnelauproduitdescourantsstatoriquesparlesforcesélectromotrices:
∑=
Ω=Γ
m
j
jjm
em titet
1
)().(1
)( (II.3)
Pourunsystèmeéquilibréàphases,l’expressiondelaFÉMàvide )(te j delaphase j peut,à
vitesseΩ donnée,semettresouslaformegénéralesuivante:
∑∞
=
π−−ϕ−ω=
1
21
h
ehhj )m/)j(hthsin(E)t(e (II.4)
où Ω= .pω .
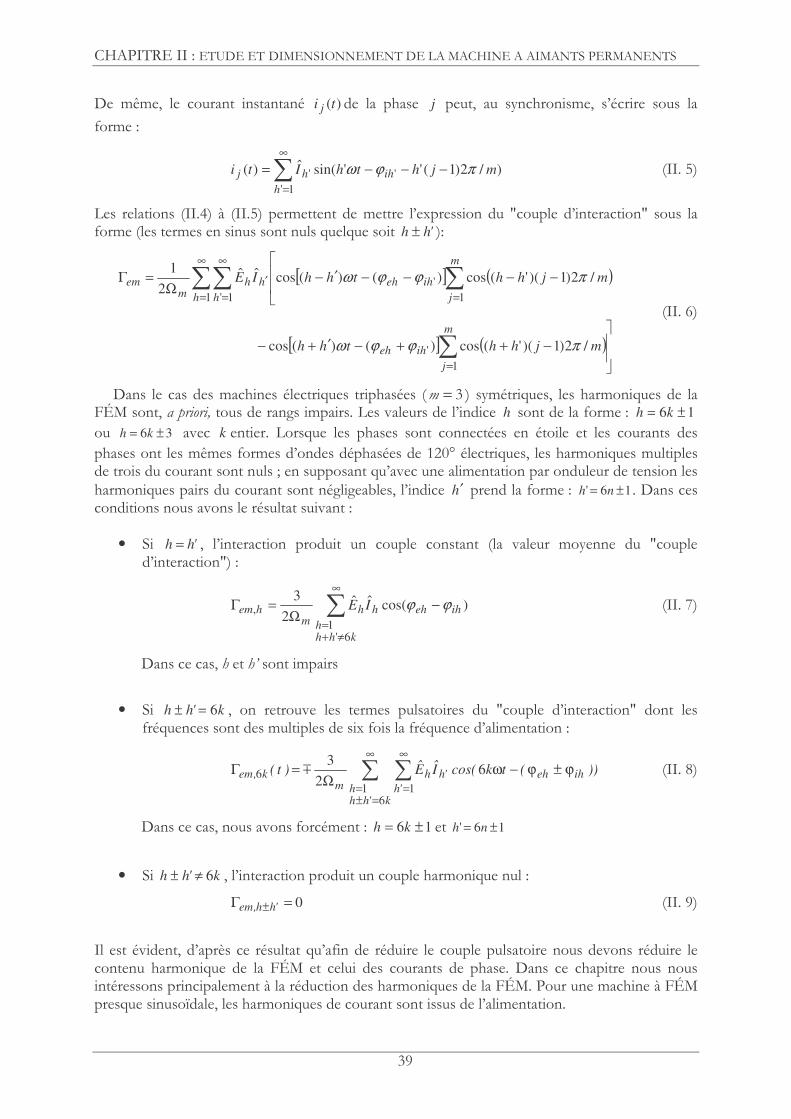
CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
39
De même, le courant instantané )(ti j de la phase j peut, au synchronisme, s’écrire sous la
forme:
∑∞
=
−−−=
1'
'' )/2)1(''sin(ˆ)(
h
ihhj mjhthIti πϕω (II.5)
Les relations (II.4) à (II.5) permettent demettre l’expression du "couple d’interaction" sous laforme(lestermesensinussontnulsquelquesoit 'hh ± ):
[ ] ( )
[ ] ( )
−++−′+−
−−−−′−
Ω=Γ
∑
∑∑∑
=
=
∞
=
∞
=
′
m
j
iheh
m
j
iheh
h h
hhm
em
mjhhthh
mjhhthhIE
1
'
1
'
1 1'
/2)1)('(cos)()(cos
/2)1)('(cos)()(cosˆˆ2
1
πϕϕω
πϕϕω
(II.6)
Dans le casdesmachines électriques triphasées ( 3= ) symétriques, lesharmoniquesde laFÉMsont,%tousderangsimpairs.Lesvaleursdel’indice h sontdelaforme: 16 ±= kh ou 36 ±= kh avec k entier. Lorsque les phases sont connectées en étoile et les courants desphasesontlesmêmesformesd’ondesdéphaséesde120°électriques, lesharmoniquesmultiplesdetroisducourantsontnuls;ensupposantqu’avecunealimentationparonduleurdetensionlesharmoniquespairsducourantsontnégligeables,l’indice h′ prendlaforme: 16' ±= nh .Danscesconditionsnousavonslerésultatsuivant:
• Si 'hh = , l’interaction produit un couple constant (la valeur moyenne du "coupled’interaction"):
)cos(ˆˆ2
3
6'1
, iheh
khhh
hhm
hem IE ϕϕ −Ω
=Γ ∑∞
≠+=
(II.7)
Danscecas,etsontimpairs
• Si k'hh 6=± , on retrouve les termes pulsatoires du "couple d’interaction" dont les
fréquencessontdesmultiplesdesixfoislafréquenced’alimentation:
∑ ∑∞
=±=
∞
=
ϕ±ϕ−ωΩ
=Γ
k'hhh 'h
iheh'hhm
k,em ))(tkcos(IE)t(
61 1
6 62
3 (II.8)
Danscecas,nousavonsforcément: 16 ±= kh et 16' ±= nh
• Si k'hh 6≠± ,l’interactionproduituncoupleharmoniquenul:
0=Γ ± 'hh,em (II.9)
Il est évident,d’après ce résultatqu’afinde réduire le couplepulsatoirenousdevons réduire lecontenu harmonique de la FÉM et celui des courants de phase. Dans ce chapitre nous nousintéressonsprincipalementàlaréductiondesharmoniquesdelaFÉM.PourunemachineàFÉMpresquesinusoïdale,lesharmoniquesdecourantsontissusdel’alimentation.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
40
Les harmoniques de la FÉM proviennent de l’interaction d’un bobinage statorique et del’induction d’entrefer produite par les aimants. Par conséquent, la réduction du contenuharmonique de la FÉM, peut se faire en agissant à la fois sur le type de bobinage etl’épanouissementdesaimants.
<<**??**;;** '%%D
Lenombred’encochesstatoriquesestunparamètreimportant.Eneffet,cechoixobéitàdescontraintesgéométrique,électromagnétiqueetmécanique:
• Ungrandnombred’encochesstatoriquescompliquelafabricationetlamiseenplacedubobinagestatorique,entraînantl’augmentationducoûtdelamachine.• Pourunsystèmed’enroulementsetunnombredepôlesquelconque, lechoixappropriédu nombre d’encoches statoriques permet d’adopter un pas d’enroulement qui offrirait lapossibilitéderéduirecertainsharmoniquesdebobinage.• Pour un nombre de pôles quelconque, le choix approprié du nombre d’encochesstatoriquespermetdepousserlespulsationsducouplededétenteversdehautesfréquences.
Pourunnombred’encochesfixé,onpeutagirsurlesharmoniquesdebobinage(lesharmoniquesd’espace)enadoptantlebobinageleplusadéquat.Naturellement,lesbobinageslesplussouventadoptés sont ceux à deux couches et à pas raccourci, ils permettent, grâce au degré de libertéqu’ilsapportent,desupprimerunharmoniqued’espaceparticulierenadoptantunpasadéquatouderéduiresensiblementletauxdeplusieursharmoniques.Reprenonslarelationétablieducoefficientderaccourcissement==??@@>>==??AA>>:
)hsin(K rh,rac
2
πγ= (II.10)
où rγ est le rapport de pas d’enroulement sur le pas polaire. Ce coefficient est nul pour unharmoniqued’espacederang h si:
π=πγ
kh r
2 (II.11)
Pour annuler l’harmonique de rang h il faut donc choisir un raccourcissement vérifiant larelationcidessous:
h
kr
2=γ (II.12)
Lenombreentier k doitêtresupérieurà1demanièreàconserveraucoefficientdufondamentalunevaleurlaplusgrandepossible.Donc,pouréliminerparexemplel’harmonique5,nousdevonsavoir:
15
12
10
8
5
4
5
22 ===×=γ r (II.13)
Etpouréliminerl’harmonique7,nousdevonsavoir:
14
12
7
6
7
32 ==×=γ r (II.14)

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
41
Parailleurs,onpeutadopterunraccourcissementintermédiairequipermetderéduireàlafoisl’harmonique5et7àsavoir:
12
10
6
5==γ r (II.15)
L’écriture adoptée pour présenter les raccourcissements permet de mettre en évidence ledénominateurquireprésentelepasdiamétralennombred’encochesparpôle(15,14et12pourlesexemplescitésenII*13,II*14etII*15)etlenumérateurquireprésentelepasdebobinageennombred’encoches.
Bienqueleraccourcissementadopténouspermetdedéduirelenombred’encochesparpôleetparphase(etviceversa),nousnouslimiteronsauxcasprésentantunesymétrieélectriqueparpairedepôlesc’estàdireavecunnombred’encochesentierpar& etpar .Pourcefaire,nousavonssélectionné4typesdebobinageàquirévèlentunintérêtparticulieretquisontprésentédanslafigure(2.7).
• 3typesdebobinagesréguliers,ayantunnombreentierd’encochespar&etpar .Lesbobinages présentés sur les figures (2.7*a) et (2.7*c) permettent de réduire les harmoniquesd’espacederangs5et7,lebobinageprésentésurlafigure(2.7*d)permetd’annulerl’harmoniqued’espacederang5.• Untypedebobinagenonrégulier,avecunnombre fractionnaired’encochespar&etpar .Cebobinage,présentésurlafigure(2.7*b)etcomportant7,5encochespar&etpar ,permetd’annulerl’harmoniqued’espacederang5.Lesbobinages(a)et(b)sontintéressantslorsquel’onadopteungrandnombredepôlesdans
lamachine,cesbobinagesontl’avantaged’offrirunnombreréduitd’encochesdanslamachine.Le bobinage (b) présente un autre avantage qui est la minimisation de l’effet de la denture,commenousallonsledétaillerdanslaprochainesection,consacréeàlaminimisationducouplede"détente".
Nous montrons sur la figure (2.8) une représentation graphique des coefficients deraccourcissement des principaux harmoniques de bas rangs en fonction du pas de bobinageadopté.
(a) Pasraccourci5/6ème,12encochesparpairedepôles
(b)Pasraccourci12/15ème,15encochesparpairedepôles
(c)Pasraccourci10/12ème,24encochesparpairedepôles
(d)Pasraccourci12/15ème,30encochesparpairedepôles
Figure2.7:Différentstypesdebobinagesélectionné.
Sionconsidèreunbobinagetriphasé,onpeutdonctrouverlenombred’encochesstatoriquesnécessaireenfonctionde lapolaritéetdutypedebobinageadopté.Encoreunefois,enraison

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
42
descontraintesdeconstructionetdecoûtqu’engendreraitungrandnombred’encochesdanslamachine, nous avons fixé le nombre d’encoches statoriques à 150≤esN pour la gamme depuissanceconsidérée,avecnaturellement esN multipledunombredephasesquiesticiégalà3.Letableau(2.1)donnelenombred’encochespourlesquatretypesdebobinageconsidérés(a,b,cetd)enfonctiondunombredepairesdepôles(polarité).Onremarquequelesbobinagesdutype(a)et(b)permettentderéaliserlesmachinesjusqu’à10pairesdepôlesaveclacontraintequel’ons’est fixée ( 150≤esN ). Par contre le choix du nombre d’encoche conditionne égalementl’amplitudeet lafréquencedesharmoniquesdecouplededenturequifont l’objetde lasection2.5decechapitre.
Figure2.8:Evolutiondesprincipauxcoefficientsderaccourcissementenfonctionde rγ
Tableau2.1:Nombred’encochesstatoriquesdansunemachinetriphasée
+%D ,- ,%- ,- ,-@ 60 75 120 150A 72 90 144 ×6 84 105 × ×B 96 120 × ×C 108 135 × ×
!
;7 120 150 × ×<<**??**<<** '))##
Commenousl’avonsprécédemmentévoquéaudébutdecechapitre(section2.3),lechoixdel’épanouissement des aimants et du nombre de blocs d’aimants par pôle influe sur le contenu

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
43
harmoniquede l’ondede la «f.m.m»des aimants (figure2.2) etpar conséquentde l’inductiond’entrefer (figures 2.4 et 2.6). À partir de la figure (2.6), on peut prédire l’épanouissementnécessairepourréduireunharmoniqueciblé.Parexemple:
• Pour que l’harmonique 5 soit quasiment nul dans la «zone utile» il faudrait unépanouissement mα de80%(4/5)dupaspolaire pτ .
• Pour que l’harmonique 7 soit quasiment nul dans la «zone utile» il faudrait unépanouissement mα de85.7%(6/7)dupaspolaire.
• Pour que l’harmonique 5 et 7 soit faibles et de valeurs quasi identiques dans la «zoneutile»,ilfaudraitunépanouissement mα auxalentoursde83.3%(5/6ème)dupaspolaire.
Ces valeurs sont valables sous l’hypothèse d’une forme d’onde de la «f.m.m» des aimantsprésentée sur la figure (2.2).Pourpouvoir vérifier si lesharmoniques considérés s’annulentousontréduitsauvoisinagedesvaleursindiquées,nousavonseffectuédescalculsparélémentsfinisde l’induction d’entrefer pour différentes valeurs de l’épanouissement mα . Afin de mettre enévidence l’effet de la segmentation des aimants sur le contenu harmonique de l’inductiond’entrefer, les aimants sont subdivisés en plusieurs blocs d’aimants. Dans les simulationseffectuées, le nombre de blocs d’aimanst par pôle ( baN ) varie de 1 à 8. Comme nous l’avonsmentionné au paragraphe (2.3), ces calculs sont effectués avec un stator lisse. À l’issu de cessimulations, nous avonsobtenu la formed’ondede l’inductiondans l’entreferpourdifférentesvaleursdel’épanouissement mα etdunombre baN deblocsd’aimantsparpôle(figure2.4).Ladécomposition en série de Fourier des formes d’ondes de l’induction de l’entrefer obtenuespermetd’avoir lesprincipauxharmoniques.L’influencede mα et de baN sur lefondamentalaconduitauchoixd’unintervalleacceptablepour mα (figure(2.3)et(2.4)).Ici,ensebasantsurlesrésultatsconcernant l’évolutiondesharmoniquesde l’inductiond’entreferenfonctionde mα et
baN (figure2.9),nousaffinonslechoixde mα etcelui baN desortequeletauxd’unharmoniquedebasrangsoitannuléoulestauxdeplusieursharmoniquesdebasrangsoientminimisés.
Lesrésultatsdesimulation,présentésdanslafigure(2.9),mettentenévidencelesobservationssuivantes:
• Misàpartlecasd’unesegmentationendeuxblocs,onobservequeleminimumdutauxd’harmoniquederang5estobtenupour mα égaleà80%dupaspolaire(figure2.9).Cerésultatestenparfaiteadéquationavecceluiobtenuà l’aidede l’expression (II.2)pour la «f.m.m»desaimantsetillustrésurlafigure(2.3).
• Misàpart lecasd’unesegmentationen troisblocs, lamêmeobservationest faitepourl’harmoniquederang7del’inductiondel’entreferpourquileminimumestatteintauxenvironsde85.71%dupaspolaire.
• Pourlesharmoniquesderang11et13del’inductiond’entrefer,onretrouvel’évolutionde leurs amplitudedans l’intervalle choisi ( %90%78 << pm τα ) sur la figure (2.9).Onconstatequelestauxdesharmoniques11et13del’inductiond’entreferenfonctiondel’épanouissementsontdifférentsselonlenombredeblocsd’aimantsparpôle.Lechoixde pm τα etde baN sefera
àl’issudel’étudesurl’impactdecesparamètressurle"couplededétente".Nouspouvonsdoncdirequeglobalement,lasegmentationdesaimantsenplusieursblocsne
modifiepaslechoixdel’épanouissementglobalpouragirsurlesharmoniquesdebasrang(5et7).Parcontre,lesharmoniquesderang11et13sontrelativementsensiblesàcettesegmentationdèslorsquelatailled’unblocélémentaireestvoisinedelapériodespatialedecesharmoniques.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
44
6BB7
B<B? BA
BBC77
<
?
A
B
7
7*7@
7*;
7*;@
7*<
%
ααααJττττ#=K>
L+@L=>
6B B7 B< B? BA BB C77
7*7<
7*7?
7*7A
7*7B
7*;
7*;<
7*;?
7*;A
ααααJττττ#=K>
L+@L=>
%N<
6@
B7
B@
C77
<
?
A
B
7
7*;
7*<
%
ααααJττττ#=K>
L+6L=>
6B B7 B< B? BA BB C77
7*7<
7*7?
7*7A
7*7B
7*;
7*;<
ααααJττττ#=K>
L+6L=>
%N8
6B
B7
B<
B?
BA
BB
C77
<
?
A
B
7
7*7@
7*;
%αααα
Jττττ#=K>
L+;;L=>
6B B7 B< B? BA BB C77*7;
7*7<
7*78
7*7?
7*7@
7*7A
7*76
7*7B
7*7C
ααααJττττ#=K>
L+;;L=>
%N@
%N6
%NA
%N<
%N?
6B
B7
B<
B?
BA
BB
C77
;
<
8
?
@
A
6
B
7
7*7@
7*;
%
ααααJττττ#=K>
L+;8L=>
6B B7 B< B? BA BB C77
7*7;
7*7<
7*78
7*7?
7*7@
7*7A
7*76
7*7B
ααααJττττ#=K>
;8
%NA
%N@
%N?
%N6
%N<
Figure2.9:Evolutiondesharmoniquesdel’inductiond’entreferenfonctionde pm / τα et baN

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
45
<*@* #!Lecouplededétenteestuncouplepulsatoiredûàl’interactiondeladenturestatoriqueaveclesaimantsrotoriques.End’autrestermes,c’estuncoupledûàlavariationdel’énergiemagnétiqueauseindumoteurlorsquelerotortourneàvide:
r
rmr
WC
α
αα
∂
∂−=
)()(det (II.16)
où rα est l’angle mécanique désignant la position d’un axe lié au rotor (l’axe rδ , repèrerotorique)parrapportàunrepèrefixe(l’axe sδ liéaustator).
Ensupposantquel’inductionnormale ),( rerB αθ lelongd’unelignedechampestuniforme.On peut l’exprimer comme étant la combinaison de l’induction de l’entrefer en absenced’encoches ),( reB αθ modulée par la denture représentée par une fonction habituellementappeléefonctiondeperméancerelative )(θrP ==??66>>==??BB>>==??CC>>:
),()(),( rerrer BPB αθθαθ = (II.17)
oùθ indiquelapositionspatialeangulaire.En remplaçant (II.17) dans (II.16), et en supposant que la variation de l’énergie dans les
aimantsetdansleferestfaibledevantcelledel’entrefer,lecouplededétentepeuts’exprimerpar==??66>>:
]),()([)(
)(
2
0
22det ∫∂
∂≈
∂
∂−=
π
θαθθαα
αα dBPk
WC rer
rg
r
rmr (II.18)
Laconstante gk dépenddesparamètresgéométriques(longueur,rayond’alésage,entrefer...)dela
machine. ),(2reB αθ et )(2 θrP peuventêtreexprimésenutilisantlessériesdeFourierpar:
[ ]∑∞
=
+++=0
2 )(2sin)(2cos),(
n
rnbrnare pnBnpBB αθαθαθ (II.19)
[ ]∑∞
=
+=0
2 sincos)(
m
esmbesmar NmPNmPP θθθ (II.20)
où p2 et esN sont respectivement le nombre de pôles d’aimants et le nombre d’encochesstatoriques.
naB ,nbB ,
maP etmbP sont les coefficients de Fourier. En remplaçant (II.19) et
(II.20)dans(II.18)etenutilisantlapropriétédel’orthogonalitédesfonctionstrigonométriques,tout les termes de polarité différentes s’annulent après intégration sur [ ]π2,0 .En considérantquel’axe rδ estl’axedesymétried’unaimantrotorique( 0=
nbB )etl’axe sδ estl’axedesymétrie
d’unedentstatorique( 0=mbP ),l’expressionducouplededétentesemetsouslaforme:
respaa
nNkn
esp
g
r
rmr nNBPNn
kWC
kk
esp
αα
αα ,
1
,det sin2
)()(
,
∑∞
==
≈∂
∂−= (II.21)
avec ),2(, esesp NpPPMCN = estlePlusPetitMultipleCommun(PPMC)dunombredepôles
etdunombredesdentsstatoriques.Del’expression(II.21),onpeutidentifierlesparamètresquiontuneinfluencesurlecouplede
détente.• La combinaison du nombre de pôles et du nombre d’encoches gouverne la période àlaquelleévoluelecouplededétente.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
46
• Lescoefficientses,pn N,aB delasériedeFourierdelafonctionducarrédel’inductionde
l’entrefer. Ces coefficients peuvent être ajustés par un choix approprié de la géométrie desaimants.Nouspouvons agir à la fois sur l’épanouissement et lenombredeblocs élémentairesconstituantunpôled’aimants.• Lescoefficients
pnaP , liésà ladenture.L’actionsurlaformeet la largeurdesdentspeut
atténuer le couple de détente ==??66>>==??BB>>mais en pratique le choix de ce paramètre conditionneégalementleniveaudesaturationdesdentsetdoitprendreencomptelescontraintesmécaniquesquidoiventêtrerespectées.Toutefois,commenousallonslevoir,onpeutatténuerl’effetdeladentureenintroduisantdescalesmagnétiquesdanslesisthmesd’encoches.À travers ces différents points, nous allons développer les moyens d’action sur le couple dedétente.
<<**@@**;;** %)Commenousvenonsde lemontrer, lapériodeducouplededétenteestgouvernéepar lepluspetitmultiplecommun(PPMC)entrelenombredepôlesetlenombred’encochesstatoriques:
),2(, esesp NpPPMCN = (II.22)
Entenantcomptedelarelation(II.22),etenconsidérantlescombinaisonsdutableau(2.1),onobtientletableau(2.2)quirésumelenombredepériodesducouplededétentelorsquelerotorfaituntourcomplet.Pourlesmachinesdontlenombred’encocheparpairesdepôlesestimpaire(certainsbobinagesàpasnonentier comme lebobinagedu typeb sur la figure2.7), espN , est
deuxfoislenombred’encochesstatoriques.Parconséquent,lenombredepériodesducouplededétentelorsquelerotorfaituntourcomplet(lafréquencedufondamentalducouplededétente)double.Deplus,comptetenudeladiminutiondescoefficients
kaB etkaP avecl’augmentation
de espNnk ,⋅= ,l’amplitudedupremierharmoniqueducouplededétentediminue(relationII.21).
Tableau2.2:Nombredepériodeducouplededétente
#O
# #%%D ,- ,%- ,- ,-@ 60 150 120 150A 72 180 144 ×6 84 210 × ×B 96 240 × ×C 108 270 × ×
!
;7 120 300 × ×!D:Typesdebobinage*,-Pasraccourci5/6ème,12encochesparpairedepôles;,%-Pasraccourci12/15ème,15encochesparpairedepôles;,-Pasraccourci10/12ème,24encochesparpairedepôles;,-:Pasraccourci
12/15ème,30encochesparpairedepôles
D’unefaçongénérale,unstatorprévupourunbobinageànombreimpaird’encocheparpairedepôles double le nombre de période du couple de détente. C’est un des avantages de laconfiguration(b)quiprévoitd’utiliser7,5encochesparpôle.Ainsi,lefaitd’adopter15encochesparpairedepôles(configuration(b))aulieude12encochesparpairedepôles(configuration(a))conduitàaugmenterlenombredepériodepartourde60à150(Tableau(2.2)).

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
47
<<**@@**<<** #DNousavonsvucommentunchoix judicieuxde l’épanouissementdesaimantsetdunombre
de blocs par aimants permet de maximiser le couple volumique tout en réduisant le contenuharmoniqueducoupled’interactionélectromagnétique.Le couple de détente étant une composante exclusivement pulsatoire pour une vitesse non
nulle, il est judicieux d’étudier l’influence de la forme des pôles d’aimants sur ses principauxharmoniques. Ces harmoniques peuvent être atténués en agissant sur l’épanouissement desaimantsetlenombredeblocsd’aimantsparpôle,cequimodifielaformed’ondedel’inductiondans l’entrefer.Nousallonsdoncétudier l’influencedesaimantssur lecontenuharmoniqueducarrédel’inductiond’entrefer.Enparticulier,nousnousintéressonsauxharmoniquesquisontlasourceducouplededétente(relationII.19etII.21).Eneffet,selonlenombred’encochesetdepôlesadoptés, les rangsdesharmoniquesnonnuldecouplededétentevarient.Ainsi,pour lesbobinages considérés au tableau (2.2), les harmoniques à minimiser, dans la décompositionspectraledelafonctioncarréedel’inductiondansl’entrefer,sontderangs: 30et 2412,p/N es,p = .
Autrement dit, pour une machine à bobinages à pas entier (a, c et d), il faut minimiser
l’harmoniquederang pNes / del’ondeducarrédel’inductiond’entreferetpourunemachineàunnombreimpaired’encocheparpairedepôles(bobinagedetypebparexemple),ilfautminimiserl’harmoniquederang pNes /2 del’ondeducarrédel’inductiond’entrefer.Nousmontronssurlafigure (2.10), l’évolution des harmoniques (12, 24 et 30) du carré de l’induction d’entrefer enfonctionde l’épanouissementdes aimants ( pm τα / ) et lenombredeblocsd’aimantsparpôle
( baN ).Cesrésultatssontobtenuspourdesmachinesàstatorlisseayantlesmêmeshauteursd’aimantetlesmêmesépaisseursd’entrefer.Onobservequelesharmoniques12,24et30sontréduitspourunépanouissementsituédanslaplagede84%à88%dupaspolaireetpourcertainsnombresdeblocsd’aimantsparpôle( baN ).Pourconforternotredémarche,pourunemachineà15encochesparpairedepôles(bobinagedetype b), nous avons calculé le couple de détente en fonction de l’épanouissement des aimants( pm / τα )pourdifférentesvaleursdunombredeblocsd’aimantparpôle( baN variantde1à6
surlafigure2.11).Cescalculs,effectuésàl’aided’unlogicielélémentsfinis,sontenaccordaveclesrésultatsdelafigure2.10etmontrentquel’amplitudeducouplededétenteestminimalepourunépanouissementsituédanslaplagede84%à88%dupaspolairepour =baN 2,3,4ou6.Eneffet,sachantquelecouplenominaldelamachineestde380kNm(.tableau1.4),danslaplageconsidérée pour pm / τα , le couple de détente reste inférieur à 0,2% du couple nominal pour
=baN 2,3,4ou6etinférieurà0.3%pour 5=baN (Fig.2.11).Onconstatequelasegmentationdechaquepôled’aimantenplusieursblocsélémentairesauneffetnonnégligeablesurl’amplitudeducouplededétente.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
48
6BB7
B<B?
BABB
C77
<
?
A
B
7
7*;
7*<
%
ααααJττττ#=K>
+P ;<=>
6B B7 B< B? BA BB C77
7*7<
7*7?
7*7A
7*7B
7*;
7*;<
ααααJττττ#=K>
+P ;<=>
%N@
%N<
6B
B7
B<
B?
BA
BB
C7 7
<
?
A
B
7
7*7@
%
ααααJττττ#=K>
+< <?=>
6B B7 B< B? BA BB C77
7*77@
7*7;
7*7;@
7*7<
7*7<@
7*78
7*78@
7*7?
7*7?@
ααααJττττ#=K>
+P <?=>
%N@
%N<
%N8
%N;
%NA
%N6
%N?
6B
B7
B<
B?
BA
BB
C77
<
?
A
B
7
7*7<
7*7?
%
ααααJττττ#=K>
+P 87=>
6B B7 B< B? BA BB C77
7*77@
7*7;
7*7;@
7*7<
7*7<@
7*78
7*78@
ααααJττττ#=K>
+P 87=>
;<8?@A6B
6B B7 B< B? BA BB C77
7*77@
7*7;
7*7;@
7*7<
7*7<@
7*78
7*78@
ααααJττττ#=K>
+P 87=>
%NA
%N;
%N6
%N8
%N<
%N@
Figure2.10:Harmoniquesducarrédel’inductiond’entreferenfonctionde pm / τα et baN
Figure2.11:Couplededétenteenfonctionde pm / τα et baN (couplenominalde380kNm)
baN

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
49
Cesrésultatsquel’onretrouvedans ==@@77>>==@@;;>>==@@<<>>permetdecomprendrelemécanismedelasegmentationetdeleureffetsurlecouplededétente.L’article==@@88>>présenteuneanalysedétailléeduphénomènedelasegmentation,onretrouvenotammentdanslecasd’unemachineàaimants,commentparunchoixjudicieuxdunombredeblocsd’aimantsetdudécalagedechaqueblocparrapport à un axe donné on peut significativement réduire le couple de détente sous certainesconditions.L’influencedel’espaceinter*aimantsestaussiabordée.
La segmentation des aimants a donc un impact non négligeable à la fois sur le taux desharmoniquesderangssupérieursouégalesà11delaFÉM("coupled’interaction"),commeilestmontrésurlafigure2.9,etducouplededétente.Danslaplageconsidéréepour pm τα / (0,84%à
0,88%)etpourunnombredeblocsd’aimantsparpôle 4=baN ,l’amplitudedel’harmonique11de laFÉMestminimale (Fig.2.9), cellede l’harmonique13 reste relativement acceptable (Fig.2.9) et l’amplitude du couple de détente est presque minimale. Dans la suite de l’étude, lesaimantssontsegmentésen4blocsélémentairesparpôle.
<<**@@**88** D!
L’utilisation des cales d’encoches est, tout d’abord, une opérationmécanique permettant deretenir les conducteurs dans les encoches. Les cales sont souvent fabriquées à partir d’unmatériau rigide, isolant et amagnétique. Il est parfois intéressant d’utiliser un matériaumagnétique,maisdefaibleperméabilitérelative( 10≤rµ )afind’atténuerlavariationbrusquedelaperméanced’entrefer.Ceciapoureffetd’atténuerlecouplededétente.Nousmontronssurlafigure (2.12) l’allure de l’induction d’entrefer dans différentes configurations. L’absence del’encochage (figure 2.12*a) donne lieu à des «plateaux» de l’induction qui sont perturbésuniquement par l’effet de la segmentation des aimants rotoriques. Nous constatons bien lasignaturedelasegmentationen4blocsélémentairesdechaquepôle.Laprésencedeladentureaccentuelaperturbationdel’induction(figure2.12*b)etfaitapparaîtredesharmoniquesderangsélevés.L’utilisationdecalesmagnétiques(figure2.12*c)atténuecesperturbations.Le taux d’atténuation dépend de la perméabilité relative des cales utilisées. Néanmoins,
l’utilisation de cales très perméables peut affecter les performances de la machine. Un choixjudicieuxde rµ s’impose.
0000 50505050 100100100100 150150150150 200200200200 250250250250 300300300300 350350350350
*1*1*1*1
*0.5*0.5*0.5*0.5
0000
0.50.50.50.5
1111
Posit ionrotorique[°élect riques]Posit ionrotorique[°élect riques]Posit ionrotorique[°élect riques]Posit ionrotorique[°élect riques]
Inductiond'entrefer[T]
Inductiond'entrefer[T]
Inductiond'entrefer[T]
Inductiond'entrefer[T]
0000 50505050 100100100100 150150150150 200200200200 250250250250 300300300300 350350350350
*1*1*1*1
*0.5*0.5*0.5*0.5
0000
0.50.50.50.5
1111
Positionrotorique[°électriques]Positionrotorique[°électriques]Positionrotorique[°électriques]Positionrotorique[°électriques]
Inductiond'entrefer
Inductiond'entrefer
Inductiond'entrefer
Inductiond'entrefer
0000 50505050 100100100100 150150150150 200200200200 250250250250 300300300300 350350350350
*1*1*1*1
*0.5*0.5*0.5*0.5
0000
0.50.50.50.5
1111
Posit ionrotor ique[° é lectr iques]Posit ionrotor ique[° é lectr iques]Posit ionrotor ique[° é lectr iques]Posit ionrotor ique[° é lectr iques]
Inductiond'entrefer[T]
Inductiond'entrefer[T]
Inductiond'entrefer[T]
Inductiond'entrefer[T]
(a)statorlisse (b)statordenté (c)statordentéaveccales
Figure2.12:Formed’ondedel’inductiond’entreferdelaMSAPderéférenceàvide
Ceci est une analyse locale de l’effet des calesmagnétiques.D’un point de vue globale, ons’intéresse à la formed’onde de la FÉMà vide ainsi qu’au couple de détente. La figure (2.13)montre la FÉM à vide obtenue pour une même machine avec ou sans utilisation de calesmagnétiques en prenant en compte l’effet de la saturation. À l’inverse de ce qu’on pouvaitprévoir, les calesmagnétiques augmentent légèrement la FÉM à vide. Cette augmentation estfaible(≈+2.5%surlefondamental)etdépenddelavaleurdelaperméabilitédescales.Àlalimite,lorsque les cales sont en acier très perméable ( ferr µµ = ) et leur épaisseur est suffisante pour

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
50
qu’ellesrestentnon*saturées,ilestévidentquelescalescourt*circuitentlebobinageetatténuentfortementlaFÉM.Lafigure(2.14)montrequel’amplitudeducouplededétenteestconsidérablementatténuéeparlaprésencedescalesmagnétiques.Unediminutiondel’ordrede72%estobtenueavecdescalesayantuneperméabilitérelative 10≈µ .
Soulignonsqueparfoisl’effetdescalespeutêtreinversesurlaFÉM,lorsquelalargeurdesdents est sensiblement identique à l’espace inter*pôlaire et que l’entrefer est faible, accentuantainsilesfuitesdanslesaimantscommel’illustrelafigure(2.15).
0000 50505050 100100100100 150150150150 200200200200 250250250250 300300300300 350350350350
*4000*4000*4000*4000
*3000*3000*3000*3000
*2000*2000*2000*2000
*1000*1000*1000*1000
0000
1000100010001000
2000200020002000
3000300030003000
4000400040004000
EE EEvv vvii ii dd ddee ee[V]
[V]
[V]
[V]
Positionrotorique[°electriques]Positionrotorique[°electriques]Positionrotorique[°electriques]Positionrotorique[°electriques]
avecca lesmagnétiquesavecca lesmagnétiquesavecca lesmagnétiquesavecca lesmagnétiques
sans ca lessans ca lessans ca lessans ca lesmagnetiquesmagnetiquesmagnetiquesmagnetiques
Figure2.13:InfluencedescalesmagnétiquessurlaFÉMàvide
5555 10101010 15151515 20202020 25252525*4000*4000*4000*4000
*3000*3000*3000*3000
*2000*2000*2000*2000
*1000*1000*1000*1000
0000
1000100010001000
2000200020002000
3000300030003000
4000400040004000
CC CCdd ddee ee tt tt(N.m)
(N.m)
(N.m)
(N.m)
Posit ionrotoriquesurunpasdenta ire[°électrique]Posit ionrotoriquesurunpasdenta ire[°électrique]Posit ionrotoriquesurunpasdenta ire[°électrique]Posit ionrotoriquesurunpasdenta ire[°électrique]
sansca lesmagnétiquessansca lesmagnétiquessansca lesmagnétiquessansca lesmagnétiquesavecca lesmagnétiquesavecca lesmagnétiquesavecca lesmagnétiquesavecca lesmagnétiques
Figure2.14:Influencedescalessurlecouplededétente
CalesCales
Aimant NordAimant Sud
Den
t
Den
t
Enc
oche
Den
t
Flux de fuites
Enc
oche
Figure2.15:Illustrationdesfluxdefuitedesaimants

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
51
<*A* ! # !#!
Ladémarchededimensionnementprésentéeprécédemmentestadoptéepourlarecherchedelaconfiguration«optimale»desmachinesàaimantspour l’applicationconsidérée.Nousavonssoulignéquelenombredepôlesétaitunparamètreimportantetdécisionnel;nousallonsdoncprésenter les résultats de simulation en fonction de ce paramètre. Notons que pour chaquepolarité,uneétudededimensionnementoptimaleesteffectuée.
Dans un premier temps, nous considérons que lesmachines ont un rotor lisse, et que lesaimantsde forme rectangulaire sontmontés sur la surfacedu rotor.Nousconsidérons toutdemême que les encoches sont droites car, nous savons d’ores et déjà que les bobines serontréaliséesàpartirdefilsméplats(facilitéderéalisation)
Nousavonschoisidefixerlalongueuraxialeetlerayonexternepourtouteslesmachinesdemanière à pouvoir comparé les performances dans des conditions d’encombrement quasiidentique.LesaimantsutiliséssontdetypeNd*Fe*Betlahauteurdesaimants ah estfixéepourdes raisons que nous avons évoquées en annexe A. Cette hauteur dépend principalement del’épaisseurdel’entrefer,imposéepardesconsidérationsmécaniquesetàunevaleurde6mm.
Parailleurs,l’étudedesperformancesestfaiteenconsidérantlemêmenombredespires sN par phase et le même courant d’alimentation avec la contrainte de maintenir une densité decourantd’encoche sJ constante.
Lafigureci*dessousmontreunecoupedelamachinepour p2 =16.
Figure2.16:Coupetransversaled’unpôledelaMSAPàpôleslisses
Pourlesraisonsévoquéesprécédemment,nousadoptonsunbobinageàdeuxcouchesavecun
raccourcissementde4/5èmeouéquivalentpermettantd’annulerl’harmonique5dubobinage.Cebobinagecorrespondaumotif(b)delafigure(2.7).Lesnombresd’encochesvarientenfonctionde la polarité et ceux adoptés sont ceux de la deuxième colonne du tableau (2.1).L’épanouissementdes aimants serachoisi autourd’unevaleurpermettantde réduire fortementl’harmonique 7. Ainsi, la combinaison de ces deux techniques permet d’obtenir un boncoefficientdeformedelaFÉMentrephases.Nousnetenteronspasderéduirel’harmonique3etsesmultiplescarnoussavonsquelamachineestconnectéeenétoileetquecesharmoniquesneperturbentpaslefonctionnementdelamachineavecunealimentationéquilibrée.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
52
Lavolontéderéduirel’harmonique7delaFÉMàvidesituel’épanouissementdesaimantsauvoisinage de 154° électrique qui représente approximativement 6/7ème du pas polaire. Nouseffectuonslessimulationspourtroisvaleursdel’épanouissement, °−°−°= 154152150mpα ,afindedégagerl’évolutiondeperformanceenfonctiondeceparamètre.
Pourréduirelestempsdecalcul,lessimulationsnumériquesparélémentsfinissonteffectuéessur une paire de pôles de la machine, qui représente à la fois une symétrie géométrique,magnétiqueetélectrique.
Danscetteétudecomparative,nousallonsnousintéresserauxperformancesdesmachinesquinous semblent prépondérantes. C’est sur ces différentes performances que l’on portera unjugementquipermettradedéfinirla«meilleure»machine.Lesprincipalesperformancesétudiéessont:
• Lecouplemoyenetlecouplevolumique(kN/m²)• Le contenu harmonique de la FÉM (harmoniques 7, 11, 13 et le taux de distorsionharmoniqueTHD).• LeTauxd’OndulationduCoupleTotal(TOCT,coupletotal(d’interaction+dedétente)crêteàcrête/couplemoyen)• LeTaux d’Ondulation duCouple deDétente (TOCD, couple de détente crête à crête/couplemoyen)• LespertesJoule• Lespertesfer• Lamassedumoteursanslaculasserotoriqueetlamassedesaimants
<<**AA**;;** 9)Lahauteurde laculasseestsouventcalculéedesortequ’ellepuissecanaliser lefluxdansde
bonnesconditions.Engénéral,àunniveaud’inductiondonné,lahauteurdesculassesstatoriqueet rotorique diminue avec l’augmentation du nombre de paires de pôles. Néanmoins, nouspouvonsl’ajusterenfonctiondespertesfer.Eneffet,àvitessedonnéelorsquelapolaritéestplusfaible, la fréquence de différentes variables (externes et internes) ainsi que les pertes ferdiminuent.Dansunetellesituation,nouspouvonsadmettreunniveaud’inductionunpeuplusimportantpourdesmachinesàpolaritéplusfaible,réduisantainsilahauteurdeleursculassesetdonc leursmasses.À l’inverse, si la polarité est grande, nous gardons la dimension nécessairepour maintenir le niveau de l’induction à une valeur acceptable. Partant de ce principe, nousavonschoisideréduire laculassepour lespolarités =p2 14,12et10audétrimentd’unniveaud’inductionrelativementplusimportant.
Haut de la culasse
Milieu de la culasse
Bas de la culasse
Haut de la dent
Milieu de la dent
Bas de la dent
Figure2.17:Relevéd’inductiondanslesdifférentespartiesdustator

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
53
0
0,5
1
1,5
2
2,5
bas de dent milieu de dent haut de dent bas de culasse mil de culasse haut de culasse
Ind
ucti
on
[T
]
10 pôles
12 pôles
14 pôles
16 pôles
18 pôles
20 pôles
(a) °=150mpα
0
0,5
1
1,5
2
2,5
bas de dent milieu de dent haut de dent bas de culasse mil de culasse haut de culasse
Ind
ucti
on
[T
]
10 pôles
12 pôles
14 pôles
16 pôles
18 pôles
20 pôles
(b) °=152mpα
0
0,5
1
1,5
2
2,5
bas de dent milieu de dent haut de dent bas de culasse mil de culasse haut de culasse
Ind
ucti
on
[T
]
10 pôles
12 pôles
14 pôles
16 pôles
18 pôles
20 pôles
(c) °=154mpα
Figure2.18:Niveaud’inductionmaxdanslesdifférentespartiesdustatorenfonctionde p2

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
54
Afind’illustrerleniveaud’inductiondanslamachineenfonctiondelapolaritéchoisie,nousavonsdéfiniuncertainnombredezonesdanslesquellesnousrelevonsl’inductionpourtouteslesmachines(Figure2.17).
Lafigure(2.18),montre leniveaud’inductionmaximalatteintdans lesdifférentespartiesdustatorpour lesdifférentespolarités.Onyvoitclairementque lesmachinesà10*12et14pôlesprésententuneinductiondeculassenettementsupérieurecomparéesauxautresmachines16,18et 20 pôles (1,5 à 1,6Tpour le premier groupe et 1,2 à 1,3Tpour le second). Par contre, leniveau de l’induction dans les dents évolue dans le sens contraire, car les machines de plusgrandes polarités nécessitent plus d’encoches, la section de leurs dents diminue et le niveaud’induction dans leurs dents croît. Les contraintes technologiques (choix des dimensions desconducteurs et des isolants, nombre de conducteurs en largeur admis, ouverture d’encochemaximum)n’offrentpas lapossibilitéd’agir sur la largeurde ladentpourmaintenirunniveaud’induction(danslesdents)relativementidentiquepourtouteslespolarités.
L’augmentationdel’épanouissementdesaimants( mp α )danslaplagechoisien’affectepasdemanière significative le niveau d’induction puisque les courbes sont similaires pour les troisépanouissementssélectionnés.
Lafigure(2.19.a)montre(àrayonexterneimposédansletableau1.4)lesvaleurschoisiesdurayond’alésagepourdifférentespolarités.L’augmentationdu rayond’alésageen fonctionde lapolaritén’estpaslinéaireenraisondel’approcheadoptée(unniveaud’inductionplusélevéedanslesculassesdesmachinesàpolaritéplusfaible).Cependant,aussibienpourlesmachinesà10,12et14pôlesquepourlesmachinesà16,18et20pôles,l’évolutiondurayond’alésageenfonctionde la polarité est quasi*linéaire. En effet, le niveau d’induction est presque identique pour lesmachinesdechaquegroupe,mêmesilestroispremièresmachinesà10,12et14pôlesadmettentunniveaud’inductionplusimportant.
650
660
670
680
690
700
710
720
730
740
10 12 14 16 18 20
Polarité
Rayo
n d
'alé
sag
e [
mm
]
0 100 200 300 400 500 600 700
10 12 14 16 18 20 Polarité
Tê
te d
e b
ob
ines [
mm
]
(a)Rayond’alésage (b)Longueurd’unetêtedebobine
Figure2.19:Evolutiondurayond’alésageetdelatêtedebobineenfonctionde p2
1800
1850
1900
1950
2000
2050
2100
2150
10 12 14 16 18 20
Polarité
Masse d
es a
iman
ts [
kg
]
150 152 154
0
5000
10000
15000
20000
25000
10 12 14 16 18 20
Polarité
masse t
ota
le [
kg
]
150° 152° 154°
(a)Massedesaimants (b)Massetotale
Figure2.20:Massetotale(sansculasserotorique)etmassedesaimantsenfonctionde p2 et mpα

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
55
.Àhauteuretépanouissementdesaimantsimposés,l’évolutiondelamassedesaimantsseralamêmequecelledurayond’alésagecommeonpeutaisémentleconstatersurlafigure(2.20.a).Parailleurs, les avantages d’augmenter la polarité sont mis en relief à travers la figure (2.19.b) et(2.20.b)oùlalongueurdestêtesdebobines(c.f.annexepourlecalculdelalongueurdestêtesdebobines)etlepoidsdumoteurdiminuentavecl’augmentationdelapolarité
<<**AA**<<** $!39UneanalysequalitativeesteffectuéesurlaFÉMentrephases.Cettedernièredevantêtrequasi
sinusoïdale,nousavonsanalysésoncontenuharmoniqueenfonctiondunombredepôlesetdesépanouissements d’aimants choisis. Pour rappel, on amontré, comment l’épanouissement desaimants influence le contenu harmonique de l’induction d’entrefer et on a mis en exerguel’évolutiondesprincipauxharmoniquesen fonctionde l’épanouissement.Dans la figure (2.21),onretrouvel’évolutiondesharmoniques(exprimésen%)enfonctiondel’épanouissementetlesrésultatssontconcordants,àquelquesexceptionsprès,avecl’analysefaitedanslapremièrepartiede ce chapitre. En effet, l’harmonique 7 et 11 sont plus faible pour un épanouissement desaimantsde154°électriques,l’harmonique13estrelativementplusfaiblepourunépanouissementde150°.Onconstatequel’harmonique7passeparunminimumvariantselonl’épanouissementet lapolarité.L’harmonique11sembleprésenterunminimumpour lapolarité20quelquesoitl’épanouissementétudié,alorsquel’harmonique13présenteunminimumpourlapolarité16.Letauxdedistorsionharmoniqueleplusfaibleestatteintpourlamachineà16pôles.
0
0,1
0,2
0,3
0,4
10 12 14 16 18 20
P o l a r i t é
150° 152° 154°
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
10 12 14 16 18 20
P o l a r i t é
150° 152° 154°
(a)Harmonique7 (b)Harmonique11
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
10 12 14 16 18 20
P ol ar i t é
150° 152° 154°
0
0,2
0,4
0,6
0,8
1
1,2
10 12 14 16 18 20
P ol ar i t é
150° 152° 154°
(c)Harmonique13 (d)THD
Figure2.21:ContenuharmoniquedelaFÉMetTHDenfonctionde p2 et mpα
<<**AA**88** # #Lafigure(2.22)montre l’évolutionducouplemoyenetducouplevolumiqueenfonctionde lapolaritépourdifférentesvaleursdel’épanouissementdesaimants( mpα ),naturellementpourunrayonexterne,unnombredespiresetunentreferidentiques.Lecouplemoyenetparconséquentlecouplevolumiqueaugmententaveclapolaritéenraisonduseulparamètrederéglagequireste,à savoir le rayond’alésage.Cedernierparamètreest liédanscecas, à lahauteurde la culasse,fixéeellemêmepar leniveaud’induction toléré,mais aussipar lahauteurde l’encochequi estfixéeparlenombreetlesdimensionsdesconducteurs.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
56
350360
370380
390400
410420
430440
450
10 12 14 16 18 20
P ol ar i t é
150° 152° 154°
48
50
52
54
56
58
60
62
10 12 14 16 18 20
P ol ar i t é
150° 152° 154°
(a)Couplemoyen (b)Couplevolumique
Figure2.22:Couplemoyenetcouplevolumiqueenfonctionde p2 et mpα La figure (2.23) représente l’évolution des ondulations du couple en fonction du nombre depôles.Letauxd’ondulationducoupletotal(TOCT)surlafigure(2.23.a)passeparunminimumd’environ2%.Lamachineà16pôlesavecunépanouissementdesaimantsde152°oude154°électriques est celle qui présente ce minimum. Pour ce qui concerne le taux d’ondulation ducouple de détente (TOCD), les machines à 14, 16 et 18 pôles avec un épanouissement desaimantsde152°électriquesprésententuntauxd’ondulationinférieurà0.1%.
0
0,5
1
1,5
2
2,5
3
3,5
4
10 12 14 16 18 20
P ol ar i t é
150° 152° 154°
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
10 12 14 16 18 20
P ol ar i t é
150° 152° 154°
(a)TOCT (b)TOCD
Figure2.23:Tauxd’ondulationducoupletotaletducouplededétenteenfonctiondep2 et mpα
<<**AA**??** Lafigure(2.24)présentelespertesJouleetlespertesferenfonctiondelapolaritéàdensitéde
courant identique. Les pertes Joule ont tendance à diminuer avec la polarité en raison de ladiminutiondelalongueurdestêtesdebobine(Annexepourlecalculdespertes).
0
20
40
60
80
100
120
10 12 14 16 18 20
P ol ar i t é
Pjs à tempér atur e ambiante Pjs à tempér atur e de 95°C
0
5
10
15
20
25
30
35
40
10 12 14 16 18 20
P ol ar i t é
150° 152° 154°
°
(a)PertesJoule (b)PertesferFigure2.24:PertesJouleetpertesferenfonctionde p2 et mpα

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
57
Les pertes fer augmentent avec la polarité, la principale raison réside dans la fréquenced’alimentation qui augmente avec la polarité à vitesse constante. Toutefois notons quel’augmentationestrelativementatténuéepuisqueleniveaud’inductiondesculassesdemachinesàfaiblepolaritéestaugmenté.
<<**AA**@@** ( :La démarche de pré*dimensionnement préconisée nous a permis de mettre en évidence lesaspectssuivants:
• Lecouplemassiquecroîtaveclapolaritéetfavoriseplutôtlamachineà20pôles.• L’analyse des ondulations du couple et du taux de distorsion harmonique pénalise les
hautespolarités.• Lespertestotalescroientaveclapolaritépénalisantainsilamachineà20pôles.• Lamachineà16pôlesprésentel’intérêtd’avoirunfaibletauxdedistorsionharmonique,
un taux d’ondulation du couple total et de détente relativement faibles, un couplevolumiqueacceptableetdespertes relativement faible.Elleprésente le justemilieudesmachinesétudiées.
• Parmilestroisvaleursdel’épanouissementdesaimantsconsidérés,lavaleur °=154mpα sedémarquenotammentparlefaibletauxdel’harmonique7delaFÉM.
Danslamesureoùl’oneffectueuneétudethéoriquesanstropdecontraintesdefabrication,nousavonsmis en évidence l’amélioration que pourrait apporter le vrillage des aimants axialement.Commenousl’avonsmontrédansl’annexeB,levrillageenunnombreimportantdesegmentspermet de réduire fortement le couple de détente en affectant peu la FÉM à vide et tout enréduisantsesharmoniquesderangélevés.
<<**AA**AA** D!La hauteur des aimants a été choisie pour éluder tout risque de démagnétisation en
fonctionnementnormal.Ilestintéressantdevoirlecomportementdesaimantsdanslecasd’unfonctionnementinhabituel.
Nous avons a détaillé en annexe A, la procédure de dimensionnement de la hauteur desaimantspermettantéviter ladémagnétisationdesaimants.Danscettesectionnoussimulonsuncourt*circuittriphasésymétriqueàl’aided’uncalculévolutifparélémentsfinis.
Pouruncourt*circuit triphasé, lecourantdecourt*circuitdephaseestde2.4fois lecourantnominal à température ambiante (figure. (2.25)) alors qu’il vaut 2.1 fois le courant nominal à95°A. La raison est que l’induction des aimant diminue avec la température, le flux d’entreferdiminueenconséquence.Lecourantdecourt*circuitétant,apeutdechoseprés,égalaurapportdufluxàl’inductance,oncomprendlesraisonsdecettediminution.
Par ailleurs, en observant la figure (2.26) représentant l’induction dans les aimants, ons’aperçoitqueladémagnétisationirréversiblen’intervientpasencourt*circuittriphasé(enrégimepermanent)même à température de 95°A.En effet, l’inductionminimale dans les aimants estestiméeà0.3Tesla(figure(2.26)),lecoudededémagnétisationdelacaractéristiqueB(H)à100°Cestauvoisinagede0.2Tesla(.chapitreI).
En régime transitoire des court*circuits, les pics de courant peuvent atteindre 3 à 5 fois savaleurnominale.Nousavonseffectuéunesimulationenimposantuncourantdecourt*circuitde3foislecourantnominalàtempératureambianteetrelevéleniveaud’inductionentroisendroitsdel’aimants,aumilieudesaimants(15mm),à2mmdel’entreferetà5mmdel’entrefer(figure2.27). On observe que les parties supérieures voisines de l’aimant, on un niveau d’induction

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
58
résultant de 0.2 Tesla, un courant transitoire plus important et une température defonctionnement plus élevée, risqueraient de se traduire par des démagnétisation locales desaimants, en particulier les portions voisines de l’entrefer et localisées au milieu del’épanouissementdesaimants.Danscesconditions,ladémagnétisationdesaimantsrisqued’êtreinévitable. Par ailleurs, nous soulignons que les courts*circuits symétriques triphasés sont lesdéfautslesmoinscritiquesdescourts*circuits.
Figure2.25:Courantsdecourt*circuittriphasédanslestroisphasesdelaMSAP
Figure2.26:Niveaud’inductionaumilieudesaimantslorsd’uncourt*circuittriphasé

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
59
-1,0
-0,8
-0,6
-0,4
-0,2
0,0
0,2
0,4
0,6
0,8
1,0
0,00 100,00 200,00 300,00 400,00 500,00
(mm)
B(T
)
(a) (b) (c)
Figure2.27:Niveaud’inductiondanslesaimantslorsd’uncourt*circuittriphaséavec nI3
A.1. à2mmdel’entreferA.2. à5mmdel’entreferA.3. à15mmdel’entrefer(milieudesaimants)
<<**AA**66** /5#!!
<*A*6*;* 0#D
Dans les précédentes sections nous avions effectué une étude comparative des différentespolaritéssurlabased’unemachineàpôleslisses,avecdesaimantsmontésensurfacesd’unrotorparfaitement lisse. Nous utilisons l’architecture adoptée par Converteam pour la constructiond’unemachinerépondantaucahierdescharges.
En effet, la MSAP de référence (le prototype est une MSAP à 16 pôles avec unépanouissement des aimants de 150° électriques et 4 blocs d’aimants par pôle) est réalisée demanière à ce qu’un pôle d’aimant soitmonté sur des assises comme l’indique la figure (2.28).Cetteparticularité àdeuxconséquences,d’abord levrillagedes aimantsdevientplusdifficile etpluscoûteux,parconséquentcetteoptionneserapasretenuebienqu’intéressante.Ladeuxièmeconséquenceestque les inductancesvarientavec lapositionpuisque lesassises introduisentuneffetdesaillance.Pourlesbesoinsdelasimulationnousavonsintroduitdessimplificationssurlesassisescommele montrent les figures (3.28.a) et (3.28.b), ces modifications permettent de s’affranchir decertainescomplicationsnumériquesduesnotammentaumaillagesansaffecterlesperformancesdelamachine.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
60
,- ,%-
Figure2.28:Aimantsmontéssurdesassises
<*A*6*<* $Q #39
Des mesures de la FÉM entre phases ont été effectuées, la figure (2.29) représente uncomparaison des résultats de mesure avec ceux obtenus par simulation. Les mesures ont étéeffectuéesàtempératureambiantede20°C,et l’amplitudedelaFÉMrelevéeestde7200Vsoitunedifférencede6.4%aveclavaleurdelaFÉMobtenueparsimulation.Cettedifférencepeutêtreexpliquéeparlefaitquel’onn’apastenucomptedelasegmentationaxialedesaimants.Uneillustrationdelasegmentationaxialeetazimutaleestprésentéesurlafigure(2.30)
-8000
-6000
-4000
-2000
0
2000
4000
6000
8000
0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 0,04 0,045
Temps[s]
FE
M e
ntr
e p
hases [
V]
Simulation à 20°CSimulation à 95°CExpérimental
Figure2.29:Formed’ondeexpérimentaleetsimulationdelaFÉMentrephasesàvide
Figure2.30:Illustrationdelasegmentationd’unpôled’aimant(axialeetazimutale)
Cettediminutionde laFÉMse traduiranaturellementparunediminutiondu couple.Si on
considèrequecepourcentageresteidentiquepourlesdeuxmachinesàtempératureambianteetà95°Calorsonpeutapprocherlavaleurducouplecommelerésumeletableau(2.3).
Silesvaleursapprochéesreflètentlaréalité,celasupposequelecoupleutilede380kNmàlatempératurede95°CneserapasatteintpourlaMSAPderéférence.Toutefoisilfautrelativiserces résultatscarcommenous l’avonssouligné, la températureambiantedesaimantsestchoisie

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
61
identiqueàcelledelatempératuredanslequelbaignentlesenroulementsstatoriquesalorsqu’enréalitélatempératuredesaimantsdevraittoutnaturellementêtremoinsimportante.
Tableau2.3:Valeursducoupleobtenuesparsimulation
Coupleutile(kNm)à20°C
Coupleutile(kNm)à95°
Coupleutile(kNm)à20°Créduitde6.4%
Coupleutile(kNm)à95°Créduitde6.4%
MSAP 423 392.38 396 367.26
<*A*6*8* )
Desmesures de l’induction d’entrefer ont été effectuées sur le prototype de la machine àaimantspermanents.Pourcefaire,despointsdemesuressurunepairedepôlesdansl’entrefer(plusexactementauvoisinagedufer)ontétésélectionnés,cespointsdemesuressont indiquéspardeschiffrespourindiquerspatialementlemilieud’unedentetpardeslettrespourindiquerspatialementlemilieudel’encochescommel’indiquelafigure(2.31).Lesmesuressonteffectuéesenutilisantungaussmètre.
Lafigure(2.32)montrelasuperpositiondesrésultatsdesimulation(entraitcontinu)avecceuxobtenuspar lamesure (indiquésencercle)de l’inductiond’entrefersurunepairedepôles.Lesrésultatssontquasi identiques,avecunerelativeimportanceduniveaud’inductionmesuré,celas’expliqueparlefaitquelesmesuressonteffectuéesauvoisinagedufer.
Figure2.31:Pointsdemesuredel’inductiond’entrefer

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
62
0000 50505050 100100100100 150150150150 200200200200 250250250250 300300300300 3503503503500000
0.20.20.20.2
0.40.40.40.4
0.60.60.60.6
0.80.80.80.8
1111
1.21.21.21.2
1.41.41.41.4
Posit ionspatia le[Electrical°]Posit ionspatia le[Electrical°]Posit ionspatia le[Electrical°]Posit ionspatia le[Electrical°]
Inductiond'entrefer[Tesla]
Inductiond'entrefer[Tesla]
Inductiond'entrefer[Tesla]
Inductiond'entrefer[Tesla]
Figure2.32:Inductiond’entrefersurunepairedepôles(mesuresetsimulations)
<*6* :5<<**66**;;**
Lasaturationdesdentsetdescalesmagnétiquesapoureffetd’augmenterl’entrefereffectifet,par conséquent, de réduire à la fois le flux des aimantsmais aussi les inductances propres etmutuelles.
Ladémarchepréconisée,estbaséesurlamodélisationdusystèmetriphasééquilibré()parunsystème('().Lamachineàaimantspermanentsétantdestinéeàuneapplicationdevariationdevitesse,lasynthèsedelacommandeestbaséesurunmodèleramenédanslerepère('().Laconnaissance exacte des paramètres du modèle de la machine dans le référentiel ('() estindispensable pour le dimensionnement des régulateurs associés à l’ensemble du systèmeconvertisseurs*machine. Dans cette optique, nous avons choisi de calculer les inductancesramenées dans le repère ('() par éléments finis en tenant compte de la saturation et de laposition.Lephénomèned’hystérésisn’estpasprisencomptedanslecalculdesinductances.
Enprésencedelasaturation,lescomposantesdirecteetenquadratureduflux( qsds ψψ , )sont
àlafoisfonctiondelaposition(harmoniquesd’espace)maisaussidescourants( qsds ii , )et,par
conséquent,dupointdefonctionnementquifaitluimêmel’objetdepetitesvariationsdehautesfréquences,duesà l’alimentationde lamachineparunconvertisseurdetensioncommandéparMLI.Parailleurs,dèsl’apparitiondelasaturationducircuitmagnétique,lescomposantesdirecteetenquadraturedufluxs’avèrentinterdépendantes.Cephénomènedecouplage,connusouslenomd’effet croiséde saturation ==@@??>>==@@@@>>==@@AA>>==@@66>>,provientdu faitque les trajetsdu fluxdansl’axeet'partagelemêmecircuitmagnétique,detellesorteque,sil’augmentationdel’unedescomposantesdu courant entraînent la saturationde certainespartiesdu circuitmagnétique, lesdeuxcomposantesdufluxensontaffectées.
Envertudesconsidérationsprécédentesonpeutalorsdéfinir lescomposantesdufluxd’axedirect ),,( qsdsds iiθψ etenquadrature ),,( qsdsqs iiθψ tellesque:
qsqs
qsdsdsds
ds
qsdsdsqsdsdsqsdsds di
i
iidi
i
iid
iiiid
∂
∂+
∂
∂+
∂
∂=
),,(),,(),,(),,(
θψθψθ
θ
θψθψ (II.23)
qsqs
qsdsqsds
ds
qsdsqsqsdsqsqsdsqs di
i
iidi
i
iid
iiiid
∂
∂+
∂
∂+
∂
∂=
),,(),,(),,(),,(
θψθψθ
θ
θψθψ (II.24)

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
63
Cecinousramèneauxéquationsentensionsdanslerepère(')suivantes:
dt
d
i
i
dt
d
ii
ii
i
i
R
R
V
V
dsqs
qsds
qs
ds
qs
qs
ds
qs
qs
ds
ds
ds
qs
ds
s
s
qs
ds θ
ψθ
ψ
ψθ
ψ
ψψ
ψψ
+∂
∂
−∂
∂
+
∂
∂
∂
∂
∂
∂
∂
∂
+
=
0
0 (II.25)
Onpeutdéfinirdesinductancesincrémentalescorrespondantauxvariationsdescomposantesdufluxduesauxpetitesvariationsdescomposantesducourant,c’estàdire:
cteids
qs
ds
qsqdi
cteiqs
qs
qs
qsqqi
cteiqs
ds
qs
dsdqi
cteids
ds
ds
dsddi
qsds
dsqs
iiM
iiL
iiM
iiL
==
==
∆
∆≈
∂
∂=
∆
∆≈
∂
∂=
∆
∆≈
∂
∂=
∆
∆≈
∂
∂=
ψψψψ
ψψψψ
(II.26)
Pour la détermination des inductances incrémentales, un calcul par éléments finis et enmagnétostatiqueesteffectuépourobtenirlescomposantesdirecteetenquadraturedufluxdelamachineconsidérée.Eneffet,pourchaquecouplet( qsds ii , )nousavonscalculélescomposantes
duflux( qsds ψψ , )correspondantetce,pourdifférentespositionsdurotor.Lesinductancessont
obtenues pour chaque point de fonctionnement en tenant compte de la saturation et de lapositiondurotor.
Dans ce qui suit nous étudions le fonctionnement de la machine à courant constant
( Iii qsdsˆ
2
322 =+ , I étantl’amplitudeducourantdephase),pourchaquevaleurde dsi ondéduit
la valeur de qsi et l’angle )/arctan( qsds ii=γ . Pour chaque valeur de dsi , la composante en
quadratureducourantsubieunevariationautourd’unpointdefonctionnement( qsqs ii ∆± ).De
même,pourchaquevaleurde qsi ,onfaitvarierlacomposantedirecteducourantautourd’une
valeurde dsds ii ∆± .Naturellement, les aimants sont actifs.Ladémarchede calcul des flux estdonnéeparlesorganigrammesdesfigures(2.34)et(2.35).
Lafigure(2.35)montrel’évolutiondescomposantesdufluxaupointnominalenfonctiondela position rotorique et de l’angle γ (de –90° à 0°). Dans ce cas la composante dsi passe de
I2/3− à0alorsquelacomposante qsi évoluede0à I2/3 .Lacomposante qsψ augmente
naturellementde0verssavaleurmaximale,lacomposante dsψ augmenteégalement,carlepoint
de fonctionnement initial ( °−= 90γ ) correspond au défluxagemaximum. Les ondulations descomposantesdufluxsontrelativementfaiblesetimperceptiblessurlafigure(2.35).
La figure (2.36)montre l’évolutiondes inductances incrémentales en fonctiondudéphasage(γ )etdelaposition.Onobserveàtraverscesrésultatsobtenusquelesinductancesvarientaveclepointdefonctionnementetcommeilétaitprévisible,celles*cidiminuentavecl’augmentationduniveaudesaturationquidevientprépondérantlorsqueledéphasage γ estprochedezéro.Enl’absencededéfluxagelesdentsfaceauxaimantssesaturent.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
64
Un point intéressant est que le contenu harmonique des inductances s’intensifie lorsque ledéphasage (γ ) est voisin de zéro. La saturation partielle de certaines parties (notamment lesdents)peutexpliquercecomportement.
Unautrephénomèneintéressant,estl’évolutiondesinductancesenfonctiondudéphasage,ilsemble que l’inductance d’axe direct ait tendance à augmenter tant que la composante d’axedirectedu courant (courantdémagnétisant) resteprédominantedevant la composanted’axeenquadrature du courant, puis, amorce une pente descendante lorsque la composante d’axe enquadratureducourantdevientprédominante.Cemêmephénomèneestobservédansl’évolutiondes inductances mutuelles dqM (= qdM ) dues à l’effet croisé de saturation alors que la
l’inductanceenquadrature qqL atendanceàdiminuerduranttoutelaplagedevariationdel’angle
γ .Par ailleurs,onconstateque les inductancesmutuelles dqM ontunevaleurpositive surune
certaineplagedevariationde γ .Cetaspectparticulierestdûàlaprésencedescalesmagnétiqueslorsquelamachineestfortementdéfluxée,commenousallonslevoir.
Pourpouvoirinterpréterlephénomène,lescaractéristiquesdesmatériauxontétémodifiéesdemanièreàcequelacaractéristiquesoitlinéaireendessousducoudedesaturationetqu’ellegardesacaractéristiqueréelleaudessusducoudedesaturationcommelemontrelafigure(2.37).Cetteprécautionpermetd’éluderunemauvaiseinterprétationdesrésultats.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
65
dsi
Initialisation des paramètres
dsi , qsi , θ
qsi
θ
+−+
−−−
−
=
s
qs
ds
T
cs
bs
as
i
i
i
i
i
i
abcdq
0
)(
32
32
32
32
32
,
2/1)sin()cos(
2/1)sin()cos(
2/1sincos
θ
ππ
ππ
θθ
θθ
θθ
)1
())(1
( 0 rrr
BtroJAtrotro
µµ
µ+=
csbsas ψψψ ,,
+−−−−
+−
=
cs
bs
as
T
s
qs
ds
dqabc
ψ
ψ
ψ
θθθ
θθθ
ψ
ψ
ψ
θ
ππ
ππ
)(
32
32
32
32
32
0
,
2/12/12/1
)sin()sin(sin
)cos()cos(cos
Stockage des résultats
qsds iiqsds
,,,ψψ
θθθ ∆+=
itelimθθ =
dsdsds iii ∆+=
itedsds ii lim,=
qsqsqs iii ∆+=
non
non
iteqsqs ii lim,=
Fin
non
Pro
blè
me
Mag
nét
ost
atiq
ue
Transformation de
Park
Transformation
inverse de Park
Initialisation de la composante en quadrature
Initialisation de la compos ante directe
Initialisation de la position rotorique
Actualisation de la position
Actualisation de la composante directe
Actualisation de la composante en quadrature
Figure2.33:Organigrammedecalculdesfluxd’axedirectetenquadrature

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
66
dsI
22
2
3dsmaxqs III −=
dsds II ∆+
dsds II ∆−
dsI
qsqs II ∆+
qsqs II ∆−
qsI
Axe
q
Axe dIds
Iqs+Iqs
Iqs
Iqs-Iqs
Ids+Ids Ids-Ids
22qsds II +
Poi
nt d
e fo
nctio
nnem
ent
Pet
ites
varia
tions
aut
our
du
pt d
e fo
nctio
nnem
ent
N Combinaisons des variations possibles autour du point de
fonctionnement
θ )(T abc,dq θ
N,cs
N,bs
N,as
I
I
I
ψ
ψ
ψ
N,s
N,qs
N,ds
0
)I,I,( qsdsem θΓProblème Magnétostatique
Récupération des résultats
Pos
ition
rot
oriq
ue d
onné
e
Axe
q
Axe ddsds ψ∆−ψ dsψ dsds ψ∆+ψ
qsqs ψ∆−ψ
qsψ
qsqs ψ∆+ψ
=θ
qqiqdi
dqiddiqsds LM
ML)I,I,(Matrice
Figure2.34:Illustrationdesétapesdecalculdesperformancesdelamachineautourd’unpointdefonctionnement

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
67
Figure2.35:Composantedirecteetenquadraturedufluxenfonctiondeγ etdelaposition
γ γ
γ γ
Figure2.36:Matriceinductancesenfonctiondudéphasageγ etdelapositionrotorique
Figure2.37:Caractéristiquesmagnétiquesdesmatériauxutilisés

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
68
Figure2.38:Evolutionde ddL , qqL , dqM and qdM enfonctionde γ (a)Aveccalesmagnétiques,(b)Sanscalesmagnétiques
La figure (2.38) montre l’évolution des différentes inductances incrémentales (en valeursmoyennes)enfonctiondudéphasage(γ )etce,pourdeuxcasd’études:*(a)lorsquelesisthmesd’encochessontmuniesdeD!**(b)lorsquelesisthmesd’encochessontmuniesdeD!*
Lafigure(2.38)indiquedemanièreprévisiblequelaprésencedescalesmagnétiquessetraduitparuneaugmentationdesinductancesd’axedirectetenquadrature.
L’interprétation du comportement des différentes inductances incrémentales en fonction del’angle γ estlasuivante==@@BB>>:
§ Pour les machines dont les isthmes d’encoches sont munies de cales amagnétiques,lorsque l’angle γ varie de –90° vers 0, les dents situées en face des aimants se saturentprogressivement comme l’illustre les cartes de champs de la figure (2.39), les inductancesincrémentales propres et mutuelles ont ainsi tendance à diminuer au fur et à mesure (figure(2.38.b)). La composante en quadrature de l’inductance diminue demanièremoins prononcée,carlasaturationestmoinsprononcéesurl’axe'.§ Pour lesmachinesdont les isthmesd’encochessontmuniesdecalesmagnétiques,pourundéphasagede–90°( max
ˆ23 IIds −= O 0=qsI ),leniveaudesaturationestfaibledanslesdents
en face des aimants. Toutefois, on remarque que les isthmes d’encoches ainsi que les calesmagnétiques situées auniveaude l’espace inter*polaire, sont très saturées, comme lemontre lafigure (2.40)degauche.L’évolutiondudéphasagede–90°vers–58° révèleunediminutionduniveaudesaturationdanslescalesmagnétiquesetlesisthmessituéssurl’axe'(axeinter*polaire),alors que lamajeure partie des dents sur l’axe d (axe des aimants)maintiennent un niveau desaturationquasiidentique(moinsprononcé)surl’intervalle[*90°,*58°].Pour des valeursmoins importantes de l’angle γ , la composante en quadrature du courant
devientprédominanteetunepartiedesdentsfaceauxaimantssesaturedemanièresignificative,cequisetraduitparunediminutiondesdifférentesinductances.
Cet aspect intéressant montre qu’en présence des cales magnétiques, le comportementmagnétiquedesparties en jeu (dents, isthmes, cales)peut se traduireparune inductancedueà

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
69
l’effet croisé de saturation de valeur positive enmode de défluxage (lorsque le courant d’axedirectestnégatif).
(1) °−=γ 90 (2) °−=γ 58 (3) °−=γ 30
Figure2.39:Cartedechampsdanslecas(b)enprésencedecalesnonmagnétiques
(1) °−=γ 90 (2) °−=γ 58 (3) °−=γ 30
Figure2.40:Cartedechampsdanslecas(b)enprésencedecalesmagnétiques
<<**66**<<** '#
Laconnaissancedes inductancesdynamiques,de la résistanceetdesgrandeursharmoniquesde la tension d’alimentation (MLI), permet de résoudre le système d’équations différentielles(II.25). Toutefois, pour faciliter la résolution de ce système on peut admettre certaineshypothèses.
• Auregarddelafigure(2.35),onpeutconsidérerquelescomposantesdufluxnevarient
pas oupeu avec la position, onpeut donc considérer les termesθ∂
ψ∂ ds etθ∂
ψ∂ qs commenuls
(faibletauxd’harmoniquesdebobinage).• Les composantes du flux étant dérivables aumoins une fois au voisinage du point defonctionnement( qsds i,i ),onpeututiliserledéveloppementensériedeTaylord’unefonctionà
deuxvariables.
qs
qsdsds
q
ds
qsdsds
dqsdsdsqqsddsdsi
iii
i
iiiiiiiii
∂
∂+
∂
∂+=++
),(),(),(),(
ψδ
ψδψδδψ (II.27)

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
70
qs
qsdsqs
q
ds
qsdsqs
dqsdsqsqqsddsqsi
iii
i
iiiiiiiii
∂
∂+
∂
∂+=++
),(),(),(),(
ψδ
ψδψδδψ (II.28)
En utilisant les équations (II.27) et (II.28) dans (II.25), on aboutit au système d’équationsdifférentielles (II.29) ==@@CC>>==AA77>>. La résolution de ce système d’équations permet d’obtenir lescomposantes harmoniques de courant ( qhdh i,i ) à partir des composantes harmoniques de
tension( qhdh V,V )
−−ω+
+
=
qh
dh
dqdd
qqqd
qh
dh
qqqd
dqdd
qh
dh
s
s
qh
dh
i
i
ML
LM
i
i
dt
d
LM
ML
i
i
R
R
V
V
0
0 (II.29)
Connaissant lepointde fonctionnement ( qsds ii , ), onpeut reconstituer les courants àpartir de
(II.30):
+=
+=
∑
∑
)()(
)()(
tiiti
tiiti
h
qhqsq
h
dhdsd
(II.30)
Onobtientainsi lesgrandeurstriphaséesducourant( cba i,i,i )contenantlesfondamentalet lesharmoniquestempsissusduvariateurparlatransformationdePARKinverse.DelamêmemanièreconnaissantlescourantsetenreconstituantlaFÉMàpartirdesdérivéesdesfluxobtenusprécédemmentonpeutreconstituerlecoupleàl’aidedelaformulationsuivante:
Ω
×
=Γ
∑= c,b,ai
ii )t(i)t(e
)t( (II.31)
<<**66**88** $)Lasuperpositiondesharmoniquesdecourantaveclefondamental,permetd’obtenirlaforme
d’onde du courant de la figure (2.41). Cette dernière est quasi sinusoïdale comme on peutl’observer.
Figure2.41:Formed’ondedescourantsetanalysespectrale
(1)Alimentationsinusoïdale(2)alimentationMLIUnefoislecourantreconstitué,onobtientlecoupleàl’aidedel’équation(II.30).Pourvérifier
ladémarche,nousavonssimuléàl’aided’unlogicieldecalculparélémentsfinis,pasàpasdansletemps==????>>,lecomportementdelamachineàaimantspermanents(cellederéférence)enprésencedufondamentaldecourantetdesprincipauxrangsharmoniques(aunombrede4).

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
71
Pour des raisons de temps d’exécution, nous avons limité les fréquences prises en comptedanslespectredelatensionappliquéeàlamêmevaleur(1000Hz).Parcontre,nousavonschoiside maintenir le rapport entre la fréquence de découpage df et la fréquence d’alimentation
sf comme étant un multiple de 3, pour éviter de retrouver les principales fréquences dedécoupagedanslespectredecourant==AA;;>>.Letableau(2.5)résumelesprincipalesfréquencesdeMLIconsidéréesdansnossimulations.
Tableau2.4:FréquencedeMLI(tension)considérée
MSAP
=
=
Hzf
Hzf
d
s
974.883
666.22
Fréquences MLI
1 df
31 sd ff 8−
33 sd ff 6−
37 sd ff 2−
39 df
41 sd ff 2+
43 sd ff 4+
Parailleurs,nousavonschoisidesimulerlepointdefonctionnementquipermetàlamachinededélivreruncoupleauvoisinage380kNmsoitunangle °≈γ 24 .
<<**66**??** ##Lesrésultatsdecalculsontdonnésdanslafigure(2.42).Devisu,onpeutremarquerlaquasi
similitude des formes d’ondes du couple obtenues par éléments finis et par l’approche semianalytique. Le taux d’ondulation du couple (pic à pic) obtenu par éléments finis est de 3.05%alorsqueceluiobtenusemianalytiquementestde3,17%,soitunedifférencen’excédantpas4%.
(a)Elémentsfinis (b)Semianalytique
Figure2.42:Formed’ondeducoupleenprésenced’harmoniquesdecourant

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
72
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
6 12 18 30 36 42
EF Analytique
Figure2.43:Principauxharmoniquesducouple
La figure (2.43) montre que les amplitudes des harmoniques obtenus par éléments finisconcordentaveccellesdesharmoniquesobtenusparlaméthodesemianalytique.
Pourpouvoirséparerlesphénomènesd’interactiondesharmoniques,nousavonssimuléparélémentsfinisenpasàpasdansletempslecomportementdelaMSAPderéférencetouràtouravec une alimentation sinusoïdale et puis avec une alimentation par MLI (fondamental+ 4harmoniques de temps). La figure (2.44)montre à la fois les formes d’onde du couple et lesspectresavecunealimentationsinusoïdaleetavecunealimentationMLI.Lesdeuxspectresontétésuperposéspourpouvoirquantifierlacontributiondesharmoniquesdetemps.
Enalimentation sinusoïdale, lesharmoniquesprépondérantsdans le couplede lamachineàaimants, sont ceux dues à l’interaction des harmoniques de la FÉM avec le fondamental decourant)de rang6 (136Hz),12 (272Hz)et18 (408Hz)et à ladenture statorique (couplededétente)derang30(680Hz).
Les rangsharmoniques30 (680Hz),36 (816Hz)et 42(952Hz) sontdus à l’interactiondufondamental de temps de la FÉM avec les harmoniques de MLI de courant et mise à partl’harmoniquededenture(derang30),l’introductionparlaMLIdesautresharmoniquesdetempsn’affectepaslesharmoniques,derangsbas,déjàexistant.
Ainsi, nous pouvons conclure que le modèle développé permet la prise en compte desharmoniquesdecourantquidépendentde l’alimentationetde l’étatmagnétiquede lamachine.Cesharmoniques contribuent auxondulationsdu couplequenouspouvonsdésormaisprédireanalytiquement avec un temps de calcul nettement plus faible comparé à celui d’un calcultemporelparélémentsfinis.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
73
(a)Alimsinusoïdale (b)AlimMLI
Figure2.44:Formed’ondeducoupleobtenueparEFetanalysespectrale
<*B* Dans ce chapitre, lesdémarchesdedimensionnementd’unemachine à aimantspermanents
ont été abordées. Certains aspects de dimensionnement, tels que les moyens de réduire lesharmoniquesde laFÉMà traversun choix approprié dubobinageetde l’épanouissementdesaimants, ont été largement détaillés. En effet, l’association d’un type de bobinage à unépanouissementadéquat,permetd’obteniruneFÉMentrephasesquasi sinusoïdale, surtoutenéliminant sesharmoniquesdebas rangs (5 et7).La segmentationde chaquepôleenplusieursblocsd’aimantsdemêmepolaritéayantuneinfluencesurlesharmoniquesderangssupérieursdelaFÉM,unnombredeblocsd’aimantsparpôleestchoisienconséquencepourréduireàlafoislesharmoniquesderang11et13.
En outre, les moyens de réduire le couple de détente sont aussi présentés. L’effet del’épanouissement,delasegmentation,delaprésencedecalesmagnétique,maisaussiduchoixdunombre d’encoches sur le couple de détente y est démontré à travers un développementanalytique mais aussi par des résultats de simulations. La combinaison judicieuse de cesparamètres permet de réduire considérablement le couple de détente. En choisissant unecombinaisond’unnombred’encochesparrapportàunnombredepairesdepôles,nousavonsdoublélapulsationducouplededétente.Lavérificationdel’influencedelasegmentationsurlesrangsélevésducarrédel’induction,nousapermisdenousconforterdanslechoixdunombredeblocsd’aimantsquipermetaussideréduirelerangprincipalducouplededétente.Naturellement,l’introductionde calesmagnétiques a sensiblement réduit l’amplitudedu couplededétente.Lacombinaisondecesdifférentesactionspermetderéduiresensiblementlesondulationsducouplesansaffecterlecoupleutile.

CHAPITREII:ETUDEETDIMENSIONNEMENTDELAMACHINEAAIMANTSPERMANENTS
74
L’étude des performances est basée sur trois épanouissements d’aimants choisis en accordaveclesobservationsfaitesdanslapremièrepartie.Lerayonexterne,lalongueurutile,lecourantdephase,etl’entrefersontégalementfixésenfonctiondescontraintesimposées(présentéesauchapitreI).Demême,lenombredespiresparphaseetlahauteurdesaimantssontchoisisensebasantsurlesrésultatsdesétudesetdesanalysesprésentésenannexeA*
Les résultatsde simulation sur lamachinede référence (prototype)de laFÉMetduniveaud’inductionconcordent avecceuxobtenusexpérimentalement.Par ailleurs,Ensimulantuncasde court*circuit triphasé, nous avons constaté le bon dimensionnement des aimants pour uncourant de court*circuit de trois fois le courant nominal en régime transitoire. Toutefois uncourant plus important en transitoire associé à une température plus élevée risque dedémagnétiserlesaimantsaumoinssurlespartiesauvoisinagedel’entreferetsituéeaumilieudel’épanouissementdesaimants.
Pour compléter l’analyse sur lamachine de référence, unmodèle est développé pour tenircomptedesharmoniquesde tempsduvariateur.Cemodèlemisaupointpermetd’obtenirà lafoislaformed’ondeducourantmaisaussilaformed’ondeducoupleintégrantlesharmoniquesdetempsduvariateur.Lemodèlesebasesurladéterminationdesinductancesdynamiques.Pource faire, nous avons étudié le comportement de laMSAP (flux, inductance) en fonction de lavariation du déphasage du courant par rapport à la FÉMà vide.Dans ce registre nous avonsétudiél’évolutiondesinductancesdynamiquesenfonctiondecedéphasageetmisenévidenceuneffetcroisérelativementfaible.
Par ailleurs, l’étude a permis de mettre en relief un phénomène inhabituel. En effet, enprésencedecalesmagnétiques,pourunfortdéfluxage, les inductancesduesà l’effetcroiséontunevaleurpositive,demêmequel’inductancepropred’axedirecteàtendanceàaugmenterdansla plage de fort défluxage. On a prouvé que la présence des cales magnétiques modifie lecomportementdelamachinesurunecertaineplagededéfluxage,laraisonrésidedansl’évolutiondel’étatdesaturationauvoisinagedesisthmes,descalesetdesdents.
Laconnaissancedesinductancesdynamiques,descomposantesdufluxetdesharmoniquesdetension, permet de déduire à l’aide des équations en tension, les harmoniques de courant quisuperposés au fondamentalpermetd’obtenir la formed’ondedu courant. Soulignons la formequasisinusoïdaleducourantreflétantlefaibletauxharmonique.
Laformed’ondeducourantconnue,nousavonspuobtenirlaformed’ondeducouplepourlepointdefonctionnementchoisi.Unesimulationparélémentfinisetenpasàpasdansletempsapermisdevalider lemodèlesemi*analytique.Onyobserveclairement laquasi similitudedesformesd’ondeducoupleetdestauxd’ondulationducouple.L’intérêtdumodèlesemianalytiqueest sa relative rapidité d’exécution et son aptitude à tenir compte de tous les harmoniques duvariateurcontrairementauxméthodestemporellesparélémentsfinisquinécessited’unepartunmaillagetrèsfinetd’autrepartunpasdecalcultrèspetitpourpouvoirtenircomptedecertainsharmoniquesdetempsderangélevéd’oùuntempsdecalculprohibitif.
Danslasuitedestravaux,nousretiendronscommeMSAP,cellederéférence,elleserviradebase de comparaison à l’étude et au dimensionnement de la machine asynchrone, objet duprochainchapitre.

''22

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
84
8* '2 '111(
8*;*
Cechapitreestconsacréàlamodélisationetàl’optimisationdelamachineasynchrone.Nousaborderons, étape par étape, les principaux paramètres à prendre en compte dans ledimensionnementdelamachineasynchrone.Ayantpourobjectifdedimensionnerunemachineàinduction pour la propulsionmarine par POD, nous reprendrons le cahier des charges définipour la machine à aimants permanents, avec toutefois quelques modifications quant auxcontraintesimposéesàlamachineasynchrone.
Nousabordonsunpremierdimensionnementdelamachineasynchrone,ensebasantsurunmodèleanalytique (modèlecircuit)ausensdespremiersharmoniquesetcoupléavec lemodèledes éléments finis (EF). Ce premier modèle, même s’il permet d’obtenir avec une bonneapproximationlesprincipalesperformancesdelamachine,nepermetpasdeprendreencomptelesharmoniquesd’espaceetdetemps.
Afind’étudiercertainsaspectsde lamachineasynchrone, telsque lespertes rotoriquesduesaux harmoniques d’espace, un modèle circuit multi harmoniques d’espace (MHE) et monoharmoniquedetemps,coupléaumodèleélémentfinis,estprésenté.
Demême,pourconsidérer lespertes Joule rotoriquesduesauxharmoniquesd’espaceetdetempsetpourenvisageruneestimationassezprécisedesondulationsducouplegénéréesparcesharmoniques, un modèle circuit mono harmonique d’espace et multi harmoniques de temps(MHT)coupléaumodèleélémentsfinis,estdéveloppé.
Un calcul évolutif (pas à pas dans le temps) à l’aide du logiciel Flux2D est effectué pourvaliderlesmodèlesprésentés,notammentlesmodèlesMHEetMHT.
Toujours à l’aide du même outil de calcul, une analyse est effectuée quant aux différentesinteractionsdesharmoniquesdetempsissusduvariateur,delastructure(denturerotorique)etdelasaturationetleureffetsurlesondulationsducoupleestmisenexergue.
8*<* 0# De lamêmemanièrequepour lamachineàaimantspermanents,nousavonsfixéuncahier
des charges, mutatismutandis, dans lequel sont définies les performances et les contraintes àrespecterlorsdudimensionnement.Naturellement,toujoursdanslamêmeoptique,nousavonsfixédesintervallesdevariationdesparamètresalorsquecertainsparamètres,telquelalongueurutile uL ,resterontfixés.
Lamachineasynchrone(MAS)estsoumiseàdescontraintesthermiquesmoinsstrictes(absencedematériauxtrèssensiblescommelesaimantsNdFeB), la températureducuivre,allant jusqu’à140°C, est autorisée. Par ailleurs, on peut aussi tolérer une densité de courant dans lesconducteursde5A/mm²,sousréserved’introduiredeséventsd’aérationausommetdechaqueencochecomme lemontre la figure (3.1);descanauxd’aération sontenoutre, judicieusementdisposésàlapériphériedumoteur.
Toujoursenréférenceàcequis’estfaitsurlaMSAP,nousavonsconcentrénoseffortssurlesperformancessuivantes:
• Lecoupleélectromagnétiqueetlesmoyensd’agirsurlecouplevolumique.• Lesondulationsducoupleenchargeetlesmoyensdeleurréduction• Lespertes

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
85
Cedernierpointfaitl’objetd’uneattentionparticulièrepuisquel’onsaitquecontrairementauxmachines à aimants permanents, les machines asynchrones présentent des pertes au rotorrelativement importantes.Nousrappelonsdans le tableauci*dessous, lesprincipalescontraintesetperformancesrequises:
Tableau3.1:CahierdeschargesdelaMASpourlapropulsionPOD
Tensiondephase sV (Vefficace) 3000
PuissanceMécanique mecP (MW) 6.75
Vitesse n (tr/mn) 170
Couple moyΓ (kNm) 380
Densitédecourant sJ (A/mm²) ≤5
Pertes minimum
Couplepulsatoire minimum
Température(°C) <140
Diamètreexterne eD (m) <2
Entrefer e (mm) 4≥
Events axiaux d’aération statorique
Canaux axiaux d’aération d’encoches
Figure3.1:Canauxaxiauxd’aérationdanslaMAS
88**<<**;;** #Dans cette section, on s’applique à rappeler les relations établies de la MAS sans
démonstrationpuisqueellessontlargementdiffuséesdansla littératurescientifique.L’intérêtdereprendrecertaineséquationsestdemontrercommentévoluentlesperformancesenfonctionde

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
86
certains paramètres, ce qui par la suite nous permettra de choisir la plage de variation de cesparamètres.
Àpartirdeséquationsdestensionsstatoriquesexpriméesdansleréférentielstatoriqueetdeséquations des tensions rotoriques exprimées dans le référentiel rotorique, on a l’habitude dedéduire le système d’équations (III.1) ramené au stator (primaire) sous la forme de grandeurscomplexesassociéesauxgrandeurssinusoïdalesainsiqueleschémaéquivalentausensdupremierharmonique(figure(3.2))==??<<>>==AA<<>>==AA88>>:
′++′′+′′
=
′+++=
)(0
)(
1111
11111
rsmrrrr
rsmsssss
IILjILjIg
R
IILjILjIRU
ωω
ωω
σ
σ
(III.1)
avec:
Ω
Ω−Ω=
Ω−= mmp
gω
ω (III.2)
Ondésignepar:ω pulsationstatorique,
sLσ inductancecycliquedefuitesd’unephasedustator,
rLσ′ inductancecycliquedefuitesd’unephasedurotorramenéeaustator,
mL′ inductancemagnétisante,
rR′ résistanced’unephasedurotorramenéeaustator,
sR résistanced’unephasedustator,g glissementoul’écartrelatifdevitessedumoteur,p nombredepairesdepôlesdumoteur,
mΩ vitessemécaniquedumoteur.Dans le schémaéquivalentde la figure (3.2), gRr′ rend comptede lapuissance transmise aurotor:
23 rr
tr Ig
RP ′
′= (III.3)
sR sI1 rI1′
gRr /′mI1
mLjωferRmU1sU1
frLj ′ωfsLjω
Figure3.2:SchémaéquivalentdelaMASausensdupremierharmonique
À partir des équations précédentes, on peut déduire l’expression du couple électromagnétique==??<<>>==AA<<>>==AA88>>:
( )gRLg
UR
rr
mrem 222
213
′+′Ω
′=Γ
ω (III.4)

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
87
Lamachineasynchroneestdestinéeàunfonctionnementàvitessevariableetd’ordinaireontravailleàinductiond’entrefer(fluxmagnétisant)constant;ontravailledoncà fU m /1 constant,l’expression(III.4)peutêtreréécritedemanièresuivante:
( )gRLg
RUp
rr
rmem 222
2
13′+′
′
=Γ
ω
ω
ω (III.5)
Soitdonc:
( )2222
213
rr
rmem
RLg
Rgp
′+′
′=Γ
ω
ωφ (III.6)
Etantdonnéquel’alimentationdumoteurestassuréepardesonduleursdetension(fréquencevariable), lapulsationdescourants rotoriques ()ω) estmaintenueentrezéro (fonctionnementàvide) et )ω (fonctionnement à couplenominal).Dans cet intervalle )ω est faible et la relation(III.6)donne
r
mem
Rgp
′⋅⋅≅Γ
213
φω (III.7)
Puissance active
Pertes Joule S
tatoriques
Pertes fer S
tatoriques
Pertes Joule rotoriques
Pertes fer rotoriques
Pertes m
écaniques
Puissance mécanique
Entrefer
Puissance transm
ise au rotor
Stator Rotor Arbre
Figure3.3:Illustrationdel’écoulementdepuissancedanslaMAS
L’inductancemagnétisanteestunparamètreélectriqueimportantdansledimensionnementdelamachineasynchrone,carelle*mêmeestétroitementliéeauxparamètresgéométriquescommel’indiquelarelation(III.8)==AA88>>==AA??>>:
( ) 'e/LDp/NkL uassbm2
1∝ (III.8)
où:
p estlenombredepairedepôles,
aD estlediamètred’alésage,
uL estlalongueurutile(axiale),
e′ estl’entrefereffectif,
sN estle parphase,
sbk 1 estlecoefficientdebobinagedupremierharmoniqued’espace.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
88
Par ailleurs, connaissant le rapport de transformation qui lie le stator (primaire) au rotor(secondaire)delaMASàcage,onpeutécrirel’expressiondelarésistancerotoriqueramenéeauprimairepar==??<<>>::
( ) rsbser
r RkNN
R2
123
=′ (III.9)
rR estlarésistanced’unebarreaveccesanneaux,
erN estlenombred’encochesrotoriques,
En combinant (III.9) et (III.7), on obtient la relation liant le couple électromagnétique auxparamètresgéométriquesdelamachinedanssazone ngg ≤≤0 :
21
2
1
1m
r
er
ssb
emR
N
Nkgp φω
⋅⋅∝Γ (III.10)
oùleflux m1φ estproportionnelà ( ) muassb IeLDpNk 1
2
1 )'/(/
L’expression (III.10) permet de mettre en évidence les paramètres influant sur le coupleélectromagnétiqueaupointdefonctionnementnominal.
88**<<**<<** :DDanscettesection,nousrésumonslescritèresdeperformancesquiserontconsidéréslorsdu
dimensionnementainsiquelesparamètresgéométriquessurlesquelsnouspouvonsagir.Engardantàl’espritlecahierdescharges,lescritèresdeperformancessontprincipalement:
* Lecouplevolumique:àsavoirlecouplenécessairedansunencombrementminimum.* Lerendementetlefacteurdepuissance:agissantsurlecourantabsorbéetlespertes.* Letauxd’ondulationducouple.Lesparamètressurlesquelsonpeutagirsont:
;* #!
Lenombredepairesdepôlesestl’undesparamètreslesplusinfluents.Enplusdesonimpactsurlesdimensionsdesculasses,desdentsetdestêtesdebobine,ilauneinfluenceconsidérablesurl’inductancemagnétisante(équationIII.8)etparconséquentsurlefacteurdepuissanceetlerendement.
<* %) #%%D
Le nombre d’encoches statoriques est étroitement lié au nombre de pôles, au nombre dephasesmaisaussiautypedebobinageàadopter.Rappelonsqu’unnombreimportantd’encochesstatoriques accentue la difficulté pratique demise enœuvre dubobinage; la condition utiliséepourlaMSAPsurlenombred’encoches( 150≤esN )estaussivalablepourlaMAS.
Le choix du type de bobinage conditionne les pertes Joule rotoriques dues aux harmoniquesd’espace.Ilfautdoncjudicieusementchoisirlebobinagepermettantderéduirecespertesetpource faire, nous retiendrons les types de bobinages mentionnés dans le chapitre II, permettantd’atténuerlespremiersharmoniquesdebobinage.Àcetitre, letableau(3.2)rappellelenombre

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
89
d’encochesstatoriquesnécessairespourunepolaritéetunbobinagefixés(chapitreIIpourlestypesdebobinage).
Tableau3.2:Nombred’encochesenfonctiondubobinageetdelapolarité
,- ,%- ,- ,-B × × 96 120;7 × × 120 150;< × 90 144 ×;? 84 105 × ×;A 96 120 × ×;B 108 135 × ×
!
<7 120 150 × ×!D2Typesdebobinage:,-Pasraccourci5/6ème,12encochesparpairedepôles;,%-Pasraccourci12/15ème, 15encochesparpairedepôles;,-Pasraccourci10/12ème, 24encochesparpairedepôles;,-:Pasraccourci12/15ème,30encochesparpairedepôles
3. %)
Lechoixdunombred’encochesrotoriques erN doitêtreeffectuéenconsidérantlenombred’encochesstatoriques esN .Eneffet,à esN fixé,unchoixjudicieuxde erN permetderéduirelecoupleparasite et lesvibrations ==AA88>>==AA??>>==AA@@>>.Danscetteoptique,nousavonschoisid’adoptercertaines règles largement éditées et commentées qui permettent de minimiser certains effetsindésirables==AA88>>==AA??>>==AA@@>>.
• Afin de minimiser le couple parasite (couples réluctants) la règle suivante est
généralementadoptée:
pknNmN eser 2±≠− (III.11)où:m , n et k sontlesnombresentiers,p estlenombredepairesdepôles.
• Afin de minimiser les pertes dues aux harmoniques de denture la règle suivante estgénéralementadoptéeparlesconstructeursdemachines==AA88>>==AA??>>==AA@@>>
eseres NNN >≥25.1 (III.12)oubien
eseres N.NN 750≥> (III.13)
• Afindeminimiserlesvibrationset lesforcesradiales, larèglesuivanteestgénéralementadoptée==AA88>>==AA??>>==AA@@>>:
rkpNN eser ±≠− (III.14)
k estunnombreentier,r est l’ordredelaforceradiale(oumodevibratoire)exercésurlerotoret lestator(figure(3.4)).

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
90
Parailleurs,commelemontrel’expression(III.10),lenombred’encochesrotoriques(nombredebarres)ainsiqueleursdimensionsinfluencentlecoupleélectromagnétiqueetnaturellementlespertesJoulerotoriques.
0=r 1=r 2=r 3=r Figure3.4:Exempledemodesvibratoireradial(ouordredelaforceradiale)
?* #:
Lerayond’alésageetlenombredespiressontdesparamètresqui,naturellement,sontchoisis
de manière à fournir l’induction d’entrefer nécessaire pour avoir le couple électromagnétique.Maisilssontaussidesparamètresd’ajustementquipermettentd’atténuer,parexemple,l’effetdelapolaritésurlecourantmagnétisant(équationIII.8).
Soulignonsquelescontraintessurlesdimensionsdesencochesetdesconducteursimposéeslorsdudimensionnementdelamachineàaimantspermanentssontreconduitespourlamachineasynchrone.
Ladémarchededimensionnementadoptéeestrésuméedansl’organigrammedelafigure(3.5).

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
91
Figure3.5:Organigrammedepré*dimensionnementgéométriquedelaMAS
88**<<**88** )##Avantd’aborderladémarcheetlemodèlepermettantdecalculerlesperformancesavecplus
deprécision, ilestnécessairededistinguer lesdifférentsharmoniquesd’espaceetdetempsdesdifférentes grandeurs électromagnétiques de lamachine asynchrone. Pour ce faire, nous allonsprésenterdemanière',lesprincipauxharmoniquesd’espacesetdetempsexistantauseindesgrandeursélectriquesetmagnétiquesens’appuyantsurlesdiversespublicationsscientifiquesayantabordécethème==AA88>>==AA??>>==AA@@>>==AAAA>>==AA66>>==AABB>>==AACC>>..
Cesdifférentesrelationsnouspermettronsparlasuite,decomprendrel’originedesdifférentsharmoniques intervenant dans le courant statorique, mais aussi dans le couple, au point defonctionnement considéré. Ces points seront abordés au moment de l’étude des couplespulsatoiresdanslamachineasynchrone.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
92
Tableau3.3:Harmoniquesd’espaceetdetempsdesdifférentesgrandeursavecunealimentationentensionàl’aided’unonduleuràMLI
& '# ')# )5
FMM(référentielstatorique)
)621()1( γηλ ±±±−± gp
N er ))61(
2(
pk
pNnN eser
±±
±±± ηλ
Perméanced’entrefer(référentielstatorique)
η2)1(
±−
p
gmNer eser nNpmN ±± η2
Courantsrotoriques
±±±±−−±±±
p
Nnkg esηηγ 2)61()1(2)61(
Courantsstatoriques
−±±±±
p
Ng erλ
ηγ )1(2)61(
Couple)1(26)11( g
p
Ner −±±±±± ληγ
0
26)11(
=±±
±±±±
λ
η
eres NnN
pkpp
avec λγη ,,,,, nkm desentierspositifs
λ,m entiersliésàladenturerotoriquen entierliéàladenturestatoriquek entierliéauxharmoniquesd’espacestatoriquesη entierliéàlasaturationγ entierliéauxharmoniquesdetempsduvariateur
8*8* :)#Pour un premier dimensionnement, il est intéressant d’adopter une démarche simplifiée de
calcul permettant d’avoir de manière relativement rapide les principales performances de lamachine.Àcetusage,nousavonscouplélecircuitmonoharmonique(ausensdufondamental)aveclemodèleélémentsfinis.Malgrécettesimplicité,lemodèleainsidéveloppéprendencomptelesaspectssuivants:• Lasaturation• Lespertesferparuncalculnumériquelocal==6677>>==66;;>>.• Larésistancedestêtesdebobinesainsiquelaréactancedefuitedestêtesdebobines• DespertesJouledanslesanneauxrotoriquesetlespartieshorsfer:viaunecorrectiondelaconductivitédesbarres==??@@>>==66<<>>.Cependantlemodèlenetientpascomptedesphénomènessecondairessuivant:• Lespertessupplémentairesduesauxharmoniquesd’espace:cellesciserontabordéeslorsdudimensionnementfinalaveclamiseenœuvred’unmodèlemultiharmoniques• L’évolution de la température dans les conducteurs: celle ci est évaluée à l’aide d’unlogicieldéveloppéparConverteamMotorsSA.
Contrairementaucasdelaconversionsynchrone,oùlecoupledépenddespositionsrelativesdustatoretdurotor,laconversionasynchronedépenddelavitessedurotorparrapportàcellesdesdifférentesondestournantesgénéréesparlebobinagestatorique.Pourlecalculdelamachineasynchrone, dans l’hypothèse du 1er harmonique de temps et d’espace dominant, nous avons

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
93
utiliséuneméthodequiconsisteàmultiplierlaconductivitédespartiesconductricesdurotorparle glissement, puis, de résoudre dans lemême référentiel l’équation de diffusion du champ enrégime harmonique à la pulsation statorique imposée par l’alimentation (équations (III.15) et(III.16).Cetteméthode,bienquepeuprécise,présentel’avantaged’êtrerapideàmettreenœuvreetpermetdecalculerlesgrandeursprincipalesdelamachineenrégimepermanent.L’hypothèselaplusfortedecetteméthodeestdeconsidérerquelesdifférentsharmoniquesd’espaceontunepulsation ωg danslerotor.
Equationdediffusionduchampaustator:
JAtrotroAjr
0))(1
( µµ
ωσ =+ (III.15)
Equationdediffusionduchampaurotor:
0
1=
µ+σω
σ′
))A(tro(troAgjr
(III.16)
A lepotentielvecteur
J ladensitédecourantσ laconductivité
Le modèle ainsi établi, permet d’obtenir toutes les performances pour le point defonctionnementchoisi.
Le principe consiste à obtenir le courant statorique du schéma équivalent et de l’introduirecommeparamètresd’entréedanslemodèleparélémentsfinis.Enraisondelanonlinéarité,unprocessusitératifentrel’analyseparélémentfinisetl’analyseparcircuitéquivalentestnécessairepourtrouverlepointdefonctionnementassociéàlatensiondephasedonnée.
Laprocédurepeutserésumercommesuit:1. Dans un premier temps, après avoir introduit des données initiales telles que leglissement, un courant unitaire et une tension nominale, une première analyse enmagnétodynamique (en linéaire) est faite permettant d’obtenir la FÉM induite de phase etl’impédanceopérationnelle.
s
mop
I
jZ
1
ψω= (III.17)
2. Connaissant opZ etlatensionàappliqueroncalcule,vialeschémaéquivalentparphase,
lecourantabsorbé(correspondantàlatensionnominaleetauglissementdonné).
)LjR(Z
VI
tbssop
ref,sn,s
ω++= (III.18)
tbsL :inductancedefuitedestêtesdebobines
3. Cecourant n,sI estréintroduitcommesourcedechampdansuncalculparélémentsfinisen tenant compte de la saturation.Une fois l’analyse, en régime saturé, terminée (a glissementdonné),oncalculelaFÉMinduiteetlatensiondephase(figure3.6)
mn,stbssn,s jI)LjR(V ψω+ω+= (III.19)

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
94
mm jE ψω=
fesLjω
opZ
Inductances de fuites d’encoches
Inductances de fuites
des têtes de bobines
tbsLjω
nsI ,
nsV ,
sR
Figure3.6:Modèlecircuitparphase
4. Onvérifiesicettedernièrecorrespondàlatensionnominale.
ξ<−
=∆n,s
ref,sn,s
V
VVU (III.20)
5. Danslecascontraire,oncorrigelavaleurducourantabsorbé
)V
VV(II
n,s
ref,sn,sn,sn,s
−+= 1 (III.21)
Etonréitèrelecalculàpartirdel’étape3
6. Leprocessusitératifestarrêtélorsquelecritèredeconvergence(étape4)estatteint.Finalement, nous calculons les performances de lamachine (couple, puissance, rendement,
pertes..). La procédure peut se répéter pour un nouveau glissement, en injectant toutefois lecourantfinalobtenupourleglissementprécédentafind’accélérerlaconvergence.Unecomparaisonesteffectuéeavec lesrésultatsobtenuspar le logicielFlux2D, l’analyseest
faite dans un premier temps en linéaire et le couple est calculé par éléments finis sans tenircomptedespertesfer.Lafigure(3.7)montrelacaractéristiqueducoupleetducourantenfonctionduglissementde
4casd’étude.Eneffet,nousavonscomparélesrésultatsobtenus:
(a) Par le logicielFlux2D,enmagnétodynamiquecoupléavecunmodèlecircuitexterne, larésistance hors fer et la résistance des anneaux de court*circuit sont introduites via lemodèlecircuit.(b) Par notremodèle, mais sans la prise en compte des anneaux de court*circuit ni de larésistancehorsferdanslecalculparEF.(c) Par le logiciel Flux2D, en magnétodynamique couplé avec un modèle circuit externe,introduisant une modification de la conductivité des barres pour tenir compte à la fois desanneauxdecourt*circuit,maisaussidespartieshorsferquinesontpasconsidéréesdansl’analyse2D.(d) Par notre modèle développé en introduisant une modification de la conductivité desbarrespourtenircompteàlafoisdesanneauxdecourt*circuit,maisaussidespartieshorsferquinesontpasconsidéréesdansl’analyse2D.
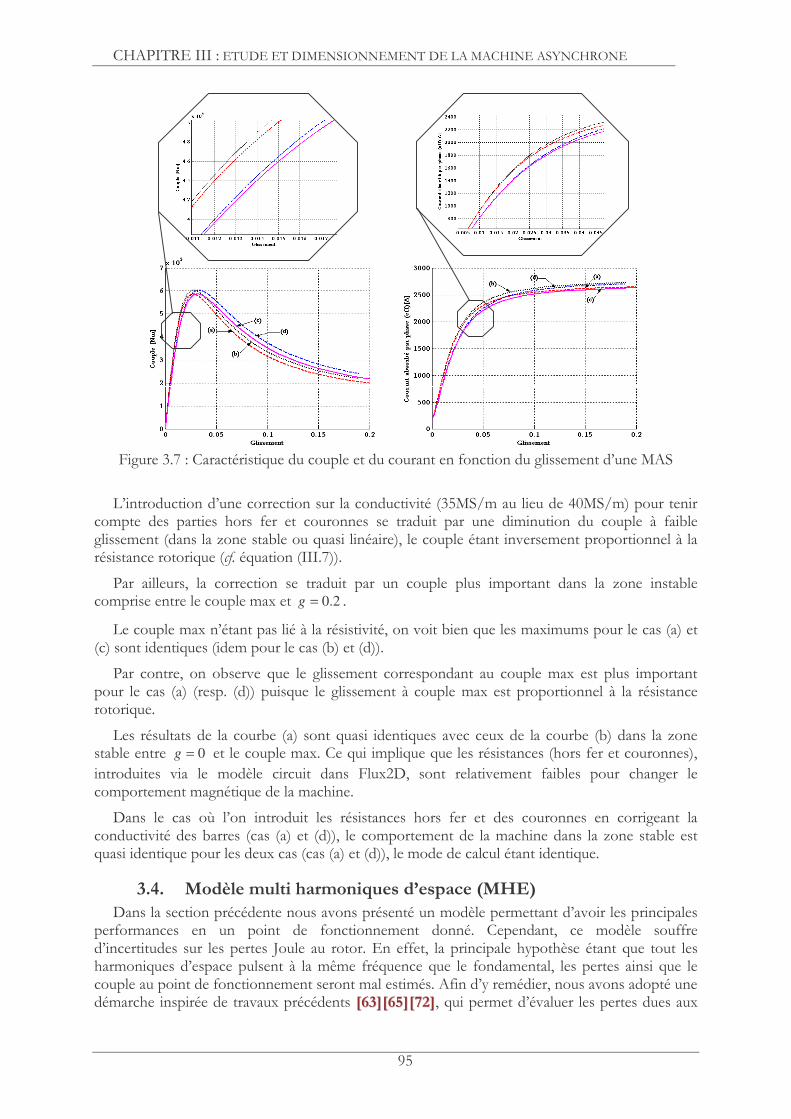
CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
95
Figure3.7:Caractéristiqueducoupleetducourantenfonctionduglissementd’uneMAS
L’introductiond’unecorrectionsurlaconductivité(35MS/maulieude40MS/m)pourtenircompte des parties hors fer et couronnes se traduit par une diminution du couple à faibleglissement(danslazonestableouquasilinéaire),lecoupleétantinversementproportionnelàlarésistancerotorique(équation(III.7)).
Par ailleurs, la correction se traduit par un couple plus important dans la zone instablecompriseentrelecouplemaxet 2.0=g .
Lecouplemaxn’étantpasliéàlarésistivité,onvoitbienquelesmaximumspourlecas(a)et(c)sontidentiques(idempourlecas(b)et(d)).
Par contre, on observe que le glissement correspondant au couplemax est plus importantpour le cas (a) (resp. (d)) puisque le glissement à couplemax est proportionnel à la résistancerotorique.
Les résultatsde la courbe (a) sontquasi identiquesavecceuxde la courbe (b)dans la zonestableentre 0=g etlecouplemax.Cequiimpliquequelesrésistances(horsferetcouronnes),introduites via le modèle circuit dans Flux2D, sont relativement faibles pour changer lecomportementmagnétiquedelamachine.
Dans le cas où l’on introduit les résistances hors fer et des couronnes en corrigeant laconductivitédesbarres (cas (a) et (d)), le comportementde lamachinedans la zone stableestquasiidentiquepourlesdeuxcas(cas(a)et(d)),lemodedecalculétantidentique.
8*?* :)#, '-Danslasectionprécédentenousavonsprésentéunmodèlepermettantd’avoirlesprincipales
performances en un point de fonctionnement donné. Cependant, ce modèle souffred’incertitudes sur lespertes Joule au rotor.En effet, laprincipalehypothèse étantque tout lesharmoniquesd’espacepulsent à lamême fréquenceque le fondamental, lespertes ainsi que lecoupleaupointdefonctionnementserontmalestimés.Afind’yremédier,nousavonsadoptéunedémarcheinspiréedetravauxprécédents ==AA88>>==AA@@>>==66<<>>,quipermetd’évaluerlespertesduesaux

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
96
principauxharmoniquesd’espace.Nous,expliquerons,par lasuite, lespointsfortset lespointsfaiblesdecettedémarche.
88**??**;;** Les harmoniques d’espace à considérer sont diverses, dans la littérature on distingue==AA88>>==AA@@>>==66<<>>=68>=6?>• Lesharmoniquesdebobinages,issusdescourantscirculantdanslebobinagestatorique.• LesharmoniquesdelaFMMd’encochesoudezigzag,dusàladistributiondescourantsdansunnombrefinisd’encoches,lapériodespatialeestcomparableaupasdentaire.• Lesharmoniquesdelaperméanced’encoches,dusàlaseuleprésenced’encochessurlesarmaturesstatoriquesetrotoriques.L’approcheadoptées’inspired’unedémarchedétailléedans==6688>>etquiconduitdirectementau
schémaéquivalentenchaînedelamachineasynchrone==AA88>>==66??>>.
Ceschémamalgrésesimperfections,donnetoutefoisunevisionglobaleetprendencomptelesaspectsphysiquesdesdifférentsphénomènes.Eneffet,surleschémaéquivalentdelafigure(3.8), chacunedes impédancesmisesen série est rattachéeàuneclassed’harmoniquescités ci*dessus.
L’établissement du schéma équivalent avec mise en série des impédances harmoniquesd’espacepartduprincipesuivant:
Siuncertainharmoniqued’espacedelaFMMstatoriqued’ordre h produitdanslespectredela FMM rotorique un harmonique de même ordre, ces harmoniques produisent le coupleasynchrone constant. Ainsi, la machine asynchrone peut être représentée par une série demachines asynchrones de différentes polarités (correspondant aux harmoniques d’espace) liéesmécaniquementetdontlestatorestconnectéensérie.
L’une des hypothèses de travail suppose que le niveau de saturation est imposé par lefondamentalde tempsetd’espace, laméthodedesuperpositionpeutalorsêtreadoptée, si l’onconsidèrequelesharmoniquesd’espace(etdetemps)n’affectentpasl’étatdesaturation.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
97
mjX
g
Rr′′′′
rXj ′
tbjX fejXsR
fsRFondamental
Harmoniques
de perméance
Harmoniques
de bobinage (Belt)
sV
p.mjX
p
p.r
g
R′′′′
p.rXj ′′′′
b
b.r
g
R ′′′′
b.rXj ′′′′
mbjX
Harmoniques
de FMMd’encoches
z.mjX
z
z.r
g
R′′′′
z.rXj ′′′′
Figure3.8:Circuitéquivalentd’uneMASàcageentenantcomptedesharmoniquesd’espace
Rs RésistancestatoriqueR’r RésistancerotoriquedufondamentalramenéauprimaireR’r.p RésistancerotoriquedesharmoniquesdeperméanceramenéauprimaireR’r.z RésistancerotoriquedesharmoniquesdeFMMd’encochesramenéauprimaireR’r.b RésistancerotoriquedesharmoniquesdebobinageramenéauprimaireRfs RésistanceéquivalentedespertesferstatoriquesXtb RéactancedefuitesdestêtesdebobinesstatoriquesXfe Réactancedefuitesd’encochesXm RéactancemagnétisantedufondamentalX’r RéactancedefuitesrotoriquesdufondamentalramenéauprimaireXm.p RéactancemagnétisantedesharmoniquesdeperméanceX’r.p RéactancedefuitesrotoriquesdesharmoniquesdeperméanceramenéauprimaireXm.b RéactancemagnétisantedesharmoniquesdebobinageX’r.b RéactancedefuitesrotoriquesdesharmoniquesdebobinageramenéauprimaireXm.z RéactancemagnétisantedesharmoniquesdeFMMd’encochesX’r.z Réactancedefuitesrotoriquesdesharmoniquesded’encochesramenéauprimaireVs Tensiondephasestatorique

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
98
L’effet d’un harmonique particulier peut être alors représenté, par un circuit équivalenttraversé par le courant statorique, on aboutit au schéma équivalent de la figure (3.8). Lesdifférentsélémentsduschémaéquivalentsontcalculéspardesformulationsanalytiquescorrigéespardescoefficientsempiriques==AA88>>==AA@@>>.
Les harmoniques de perméance sont liés à l’induction d’entrefer en régime saturé, ils sontdoncassociésen série avec labranchemagnétisante.Malgré l’intérêtdecemodèlephysique, ilpeutêtredifficilementadaptéauprogrammebasésurlecalculdechampparélémentsfinisquenousutilisons.
88**??**<<** !!##Le champ dans l’entrefer d’une machine asynchrone est directement lié à la densité
superficielledecourantcrééesurl’alésagestatorique.L’étudedesharmoniquesd’espacedecettedensité montre que l’on peut établir un lien avec les courants dans les encoches parTransformation deFourierDiscrète (TFD) ==6688>>.On envisage alors, d’utiliser uneméthode dedécomposition * recomposition par TFD pour traiter les problèmes multi harmoniques. LadémarcheconsistealorsàdéterminerlaTFDdesampères*tourstotauxdanslesencochesetdecalculerséparémentleschampsproduitsparchaquedistributionharmoniquedecourant.
8*?*<*;* !#
Connaissant la structure du bobinage, on peut déterminer les ampères*tours totaux ki ,
1,..,0 −= esNk , dans les encoches statoriques régulièrement réparties sur 2π. La TFD des ki s’écrit:
∑−
=
−==π1
0
10
2es
sNe
N
k
es
)khj(
kh N,...,h;eiJ (III.22)
Larelation(III.22)impliquequelaTFDinversepermetderetrouverlescourantsd’encoches:
∑−
=
−−==
π1
0
101
2es
esN
N
h
es
)khj(
hes
k N,...,k;eJN
i (III.23)
ainsi, l’harmoniquederang h estdonnépar ladistributiondescourantsdans lesencochesquiconduità:
10
2
−==π−
es
)khj(
es
hkh N,....k;e
N
Ji esN (III.24)
Onremarqueradansl’équation(III.22)quesil’onremplace h par hmNes − (m ≥1)onobtientle
conjugué hJ* etsionremplace h par hmNes + onobtient hJ :
=
=
+
−
hmNh
hmNh
es
es
JJ
JJ*
(III.25)
Eneffet,pourchaqueharmoniquederang h onretrouvedanslespectredes ki ,lesondes h et
hmNes ± (m ≥1).
esN :Nombred’encochesstatoriquessurtoutelamachine
h : l’harmonique d’espace défini par sph avec p le nombre de paires de pôles et
sh l’harmoniqued’espaceramenéàunepairedepôles.
8*?*<*<* 5#)
Pour illustrer l’approcheprésentéecihaut,nousconsidéronsunemachineà24encochesetunepairedepôles,àpasd’enroulement10/12èmeàdeuxcouches.Larépartitiondescourantsdans

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
99
lesencochesal’allureindiquéesurlafigure(3.9)lorsquelamachineestalimentéeparunsystèmetriphasééquilibrédecourantd’amplitude1Ampère.
LespectreharmoniqueobtenuparTFD(équationIII.22)descourantsdanslesencochesestdonnépar la figure (3.10).Nous avons inclus également les harmoniques qui correspondent àl’onde inverse ( esNh − ). La valeur négative des rangs de l’harmonique dans la figure illustreuniquementquel’ondecorrespondanteestinverse.
Figure3.9:Distributiondescourantsdanslesencoches
Figure3.10:SpectreobtenuparTFDdescourantsenpourcentagedufondamental
Soulignonsquelesspectresillustrésparlafigureci*dessussontceuxdescourantsd’encoches,
commeétantunelistede24nombrescomplexes.Ladensitésuperficielledecourantéquivalenteest affectéed’uncoefficientde filtragede l’encoche.Lesharmoniquesde laFMMsontencoreatténuésparunfacteur1/h.Eneffet,d’aprèslafigure(3.10),l’harmonique(*5)etl’harmonique19 ont la même amplitude mais les harmoniques 5 et 19 de la FMM sont dans un rapport
5)2/19sin(
)2/19(19
)2/5(5
)2/5sin(≈
ε
ε
ε
ε.
Le calcul des harmoniques allant de rangs 2/esN− à 2/esN (*11, *5, 1 et 7) suffit pour lareprésentationdetoutlespectre.
En appliquant la TFD inverse, on obtient la distribution des densités de courantcorrespondantauxharmoniques1,5,7et11danslesencochescommel’illustrelafigure(3.11).

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
100
(a)Fondamental (b)Harmonique5
(c)Harmonique7 (d)Harmonique11
Figure3.11:Distributiondesdensitésdecourantdufondamentaletdesharmoniquesdanslesencoches
L’harmonique h , issu du calcul par TFD, contient les informations concernant les
harmoniques de rang hmNes ± . Pour illustrer le phénomène, nous avons calculé le spectreharmonique des distributions des courants harmoniques de rang h (1, 5, 7 et 11 de la figure(3.11))jusqu'àunordretrèsélevé.Onobtientlesrésultatsindiquéssurlafigure(3.12).
On s’aperçoit que dans chacune des distributions harmoniques de rang h (obtenues par laTFD), il apparaît non seulement l’harmonique de rang h , mais aussi comme prévu, tout lesharmoniquesderang hmNes ± ,m ≥1,quisontaffectésd’uncoefficient )/( hmNh es ± .

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
101
Figure3.12:Spectredechaquedistributionharmonique.
88**??**88** : ! 3 !# ! $:
L’objectifdeceparagrapheestdeprésenterunmodèlecircuitdontlesélémentspeuventêtre
identifiésparuncalculdechamputilisantlesélémentsfinis.Pourcetteraison,lagéométrieréelleducircuitmagnétiquedelamachinedoitêtrepréservée.Larépartitionréelledescourantsdanslesencoches statoriques comporte des harmoniques d’espace qui peuvent être regroupés dans unnombre finideclassesd’harmoniquesbiendéfinies.À titred’exemple,pourunemachineà24encoches et une paire de pôles, nous pouvons classer les harmoniques d’espace de bobinagecomme l’indique le tableau (3.4).D’après ce tableau, pour unemachine à 24 encoches et unepairedepôlesilexiste4classesd’harmoniquesdontlesrangssont==66@@>>:
24m±1; 24m±5; 24m±7; 24m±11 avec m≥0; en sachant que les multiples de 3n’interviennentpasdanslesmachinestriphaséeséquilibrées.
Chaqueclassed’harmoniquescomprendunharmoniqueprincipaletd’autressecondairesliésaunombred’encochesstatoriques(pournotrecas24).
Un moyen simple pour décomposer la répartition réelle des courants en ces classesd’harmoniques,estdedécomposerlarépartitionréelleensériedeFourierdiscrètesurunebasededimensionégaleaunombred’encoches.
Nous développerons alors un modèle de type circuit comprenant plusieurs impédances ensériedontchacunecorrespondàuneclassed’harmoniques.Chaqueimpédanceestidentifiéeparélémentsfinisenplaçantladistributiondecourantharmoniqueassociédanslesencochesréelledustator.
Leschémaéquivalentadoptéseradoncceluiillustréparlafigure(3.13).

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
102
Tableau3.4:Classementdesharmoniques1 5 7 1123 19 17 1325 29 31 3547 43 41 3749 53 55 59… … … …
tbjX fejXsR
Fondamental
Harmoniques
de bobinage
sV5Z
7Z
hZ
1Z
sE
Figure3.13:CircuitéquivalentdelaMASàcageentenantcomptedesharmoniquesdebobinage
88**??**??** ####!Dansleprécédentparagraphenousavonsadoptéunmodèlecircuitincluantlesharmoniques
d’espace.Reprenonslemodèletelqueprésentédanslafigure(3.13)sanstenircompte,dansunpremier temps,de la résistancecorrespondantauxpertes fer.Ladémarcheconsisteà identifierl’impédance
shZ de chaque rang harmonique sh . Les étapes de la résolution du problème sont
détailléesci*après.
1. Oncalculeenmagnétostatiquel’inductancedefuited’encochecequinouspermetd’avoirla réactance de fuite d’encoche feX (figure 3.13). La réactance des têtes de bobine tbX et la
résistancestatorique sR sontcalculéesanalytiquement.
2. À chaque valeur du glissement, on détermine le courant I nécessaire pour unfonctionnement à tension constante et à vitesse nominale constante. Pour ce faire, l’approchemono harmonique d’espace est appliquée pour obtenir le courant absorbé. Ce dernier estdécomposéparTFDenutilisantl’expression(III.22).3. On détermine pour chaque rang harmonique d’espace (jusqu’au rang pNes 2/ ) ladistributiondescourantsdanslesencochespar(III.24).4. Onimposeladistributionharmoniquederang sh etonrésoutleproblèmeàfréquence
dufondamentaltoutenmultipliantlaconductivitédesbarresparleglissementshg .Leglissement

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
103
de l’harmonique khs 61±= est défini en fonction du glissement g du fondamental par larelationsuivante:
)1(1 ghg ssh −−= (III.26)
( h estprisenvaleuralgébrique).
5. Oncalculelapuissance
shS etondéduitl’impédanceshZ ' :
23'
sh
sh
shI
SZ = (III.27)
(shJ étantl’amplitudedel’harmoniquederang sh d’espace).
6. On calcule
shZ en soustrayant les fuites d’encoches deshZ ' et en multipliant par le
rapport des carrés des courants 21)/( JJ
sh . Le rapport 21)/( JJ
sh provient du principe de
conservationdespuissances2
12 3)'(3 JZJjXZS
shshfeshsh =−= (III.28)
7. Onreprendlesétapes3à6pourchaqueharmonique
8. UnefoislesimpédancesshZ déterminéesonreconstitueleschémadetypecircuitdela
figure(3.13)afindedéterminerlecourantabsorbé sI àtensiondonné:
∑+++=
shshfetbs
sns
ZXXjR
VI
)( (III.29)
9. On calcule la puissance apparente complexe absorbée dans chacune des «impédancesharmoniques»:
23 sshsh IZS =′ (III.30)
10. OndéduitlespertesJoulerotoriquesduesàchaqueharmoniqued’espace:
shshs
hjr gP )S(_′= R e (III.31)
11. Ondéduitlecouplecorrespondant:
ph
SC
ss
sh
sh/
)(
ω
′=
R e (III.32)
h étantenvaleuralgébrique
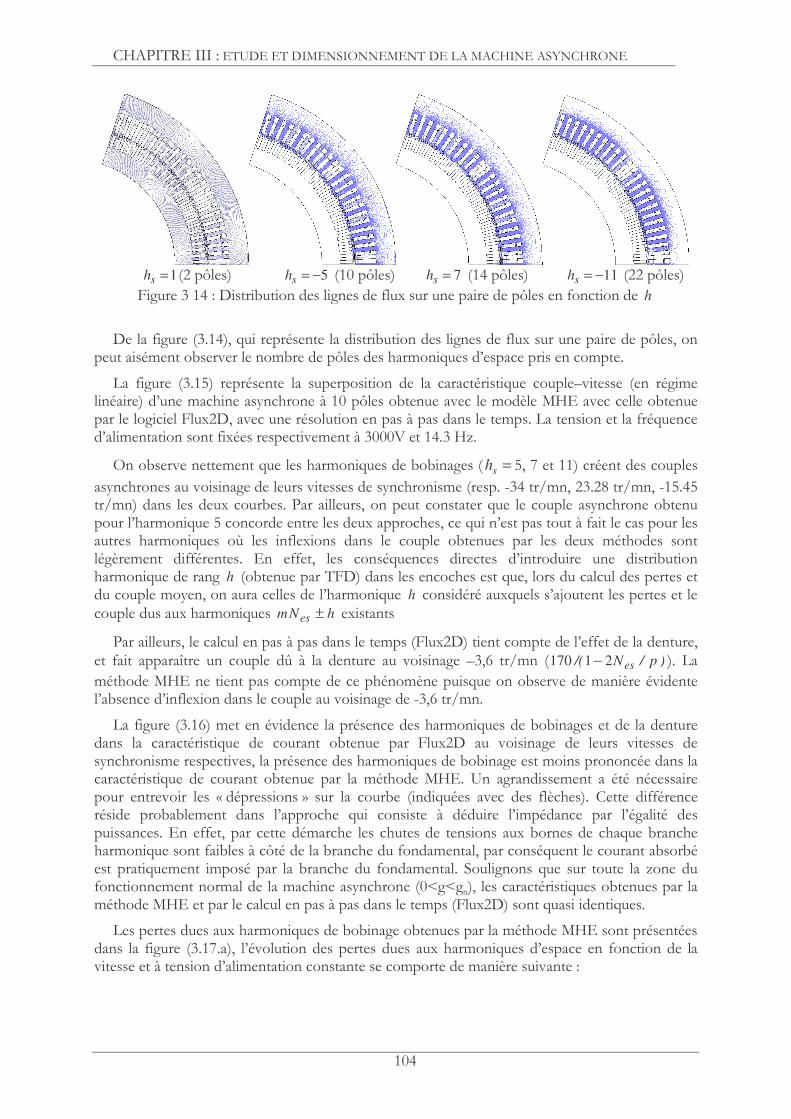
CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
104
1=sh (2pôles) 5−=sh (10pôles) 7=sh (14pôles) 11−=sh (22pôles)
Figure314:Distributiondeslignesdefluxsurunepairedepôlesenfonctionde h
Delafigure(3.14),quireprésenteladistributiondeslignesdefluxsurunepairedepôles,onpeutaisémentobserverlenombredepôlesdesharmoniquesd’espaceprisencompte.
La figure (3.15) représente la superposition de la caractéristique couple–vitesse (en régimelinéaire)d’unemachineasynchroneà10pôlesobtenueaveclemodèleMHEaveccelleobtenueparlelogicielFlux2D,avecunerésolutionenpasàpasdansletemps.Latensionetlafréquenced’alimentationsontfixéesrespectivementà3000Vet14.3Hz.
Onobservenettementquelesharmoniquesdebobinages( =sh 5,7et11)créentdescouplesasynchronesauvoisinagedeleursvitessesdesynchronisme(resp.*34tr/mn,23.28tr/mn,*15.45tr/mn)dans lesdeuxcourbes.Parailleurs,onpeutconstaterque lecouple asynchroneobtenupourl’harmonique5concordeentrelesdeuxapproches,cequin’estpastoutàfaitlecaspourlesautres harmoniques où les inflexions dans le couple obtenues par les deux méthodes sontlégèrement différentes. En effet, les conséquences directes d’introduire une distributionharmoniquederang h (obtenueparTFD)danslesencochesestque,lorsducalculdespertesetducouplemoyen,onauracellesdel’harmonique h considéréauxquelss’ajoutentlespertesetlecoupledusauxharmoniques hNm es ± existants
Parailleurs,lecalculenpasàpasdansletemps(Flux2D)tientcomptedel’effetdeladenture,et fait apparaître un couple dû à la denture au voisinage –3,6 tr/mn ( )p/N/( es21170 − ). LaméthodeMHEnetientpascomptedecephénomènepuisqueonobservedemanièreévidentel’absenced’inflexiondanslecoupleauvoisinagede*3,6tr/mn.
Lafigure(3.16)metenévidence laprésencedesharmoniquesdebobinagesetde ladenturedans la caractéristique de courant obtenue par Flux2D au voisinage de leurs vitesses desynchronismerespectives,laprésencedesharmoniquesdebobinageestmoinsprononcéedanslacaractéristique de courant obtenue par laméthodeMHE. Un agrandissement a été nécessairepour entrevoir les «dépressions» sur la courbe (indiquées avec des flèches). Cette différenceréside probablement dans l’approche qui consiste à déduire l’impédance par l’égalité despuissances.En effet, par cettedémarche les chutesde tensions auxbornesde chaquebrancheharmoniquesontfaiblesàcôtédelabranchedufondamental,parconséquentlecourantabsorbéest pratiquement imposé par la branche du fondamental. Soulignons que sur toute la zone dufonctionnementnormaldelamachineasynchrone(0<g<gn),lescaractéristiquesobtenuesparlaméthodeMHEetparlecalculenpasàpasdansletemps(Flux2D)sontquasiidentiques.
LespertesduesauxharmoniquesdebobinageobtenuesparlaméthodeMHEsontprésentéesdans la figure (3.17.a), l’évolutiondespertesdues auxharmoniquesd’espace en fonctionde lavitesseetàtensiond’alimentationconstantesecomportedemanièresuivante:
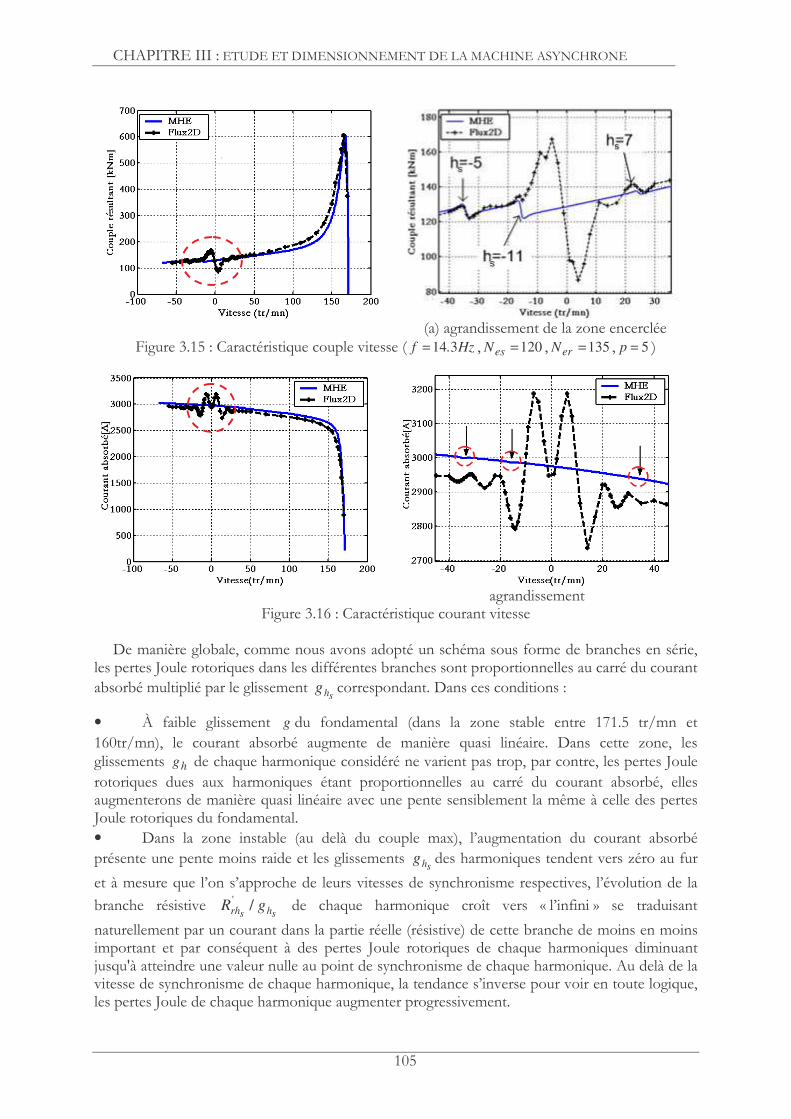
CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
105
(a)agrandissementdelazoneencerclée
Figure3.15:Caractéristiquecouplevitesse( Hz.f 314= , 120=esN , 135=erN , 5=p )
agrandissement
Figure3.16:CaractéristiquecourantvitesseDemanièreglobale,commenousavonsadoptéunschémasousformedebranchesensérie,
lespertesJoulerotoriquesdanslesdifférentesbranchessontproportionnellesaucarréducourantabsorbémultipliéparleglissement
shg correspondant.Danscesconditions:
• À faible glissement g du fondamental (dans la zone stable entre 171.5 tr/mn et160tr/mn), le courant absorbé augmente de manière quasi linéaire. Dans cette zone, lesglissements hg dechaqueharmoniqueconsidérénevarientpastrop,parcontre,lespertesJoulerotoriques dues aux harmoniques étant proportionnelles au carré du courant absorbé, ellesaugmenteronsdemanièrequasilinéaireavecunepentesensiblementlamêmeàcelledespertesJoulerotoriquesdufondamental.• Dans la zone instable (au delà du couple max), l’augmentation du courant absorbéprésenteunepentemoinsraideetlesglissements
shg desharmoniquestendentverszéroaufur
etàmesureque l’ons’approchede leursvitessesdesynchronismerespectives, l’évolutionde la
branche résistiveshsrh gR /' de chaque harmonique croît vers «l’infini» se traduisant
naturellementparuncourantdanslapartieréelle(résistive)decettebranchedemoinsenmoinsimportant et par conséquent à des pertes Joule rotoriques de chaque harmoniques diminuantjusqu'àatteindreunevaleurnulleaupointdesynchronismedechaqueharmonique.Audelàdelavitessedesynchronismedechaqueharmonique,latendances’inversepourvoirentoutelogique,lespertesJouledechaqueharmoniqueaugmenterprogressivement.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
106
Pourcequiconcernelecoupledechaqueharmonique(figure(3.17.b),onremarquebienquelecoupleestnégatifdans lazonestable,c’estàdirepourdesglissementsfaiblesdufondamental.En fait, les harmoniques de bobinages freinent la machine. Cependant, dans la zone dufonctionnement normal de la machine asynchrone ( ngg <<0 ), le couple de frein, lié auxharmoniquesd’espace,resterelativementnégligeable.
(a)PertesJoulerotorique
(b)Couple
Figure3.17:PrincipalesperformancesdesharmoniquesdebobinageLesrésultatsobtenusdanslafigure(3.15)ontpermisdevaliderlemodèlenotammentdansla
zone du fonctionnement normal de lamachine asynchrone ( ngg ≤≤0 ). Laméthode permetd’obtenir les pertes dues aux harmoniques de bobinage et d’évaluer le couple et le courant auvoisinage du point de fonctionnement d’unemachine saine présentant un nombre d’encochesstatoriques relativement important. La rapidité et la précision sont les intérêts de la méthodeMHEdansladéterminationdesprincipalesperformancesdelamachine
8*?*?*;* #
Le modèle présenté plus haut utilise le principe de superposition pour déterminer lesparamètres des différentes impédances dans le schéma équivalent. Pour tenir compte de lasaturation, on considère l’hypothèse que le fondamental d’espace et de temps impose l’étatmagnétiquedufer.Cettehypothèse,permetdesupposerquelasaturationalemêmeeffetsurlesinductances magnétisantes des harmoniques d’espace. Ceci nous conduit à apporter uncoefficient de saturation aux différentes branches du schéma équivalentmulti harmoniques.À

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
107
videl’étatdesaturationestleplusimportant,parconséquent,lecoefficientestdéterminéalorsdelamanièresuivante:• Uncalcul( 0=g *tensionnominale)enlinéaire,oùseullepremierharmoniqueest
présent,permetdedéterminerlavaleurdel’inductancemagnétisante( lmX _ )dufondamental
enrégimelinéaire.• Lemêmecalcul( 0=g *tensionnominale)maisentenantcomptedelasaturationdonne
lavaleurdelaréactancemagnétisante( smX _ )dufondamentalenrégimesaturé.
Le coefficient de saturation est donc, le rapport de ces deux valeurs d’inductancemagnétisante.Lemodèlemultiharmoniquesproposéenrégimesaturéestalors,celuicalculéenrégimelinéaireoùtouteslesinductancesmagnétisantesdesdifférentsharmoniquesd’espacesontaffectéesdececoefficient.
Pour illustrer, nous avons calculé pour une machine, la réactance lmX _ =15.9Ω en régime
linéaire, puis en régime saturé s_mX =15.43Ω. Le rapport des réactances permet d’obtenir le
coefficientdesaturation l_ms_ms X/XK = résumédansletableau(3.5).
Lefonctionnementétantàfluxconstant,lecoefficientdesaturationnedevraitpaschangerdevaleur en fonction de la fréquence. En effet, en poursuivant la même démarche mais à mi*fréquence,onobtientlesvaleursdesréactancesdonnéesparletableausuivant:
Tableau3.5:Coefficientdesaturation,casdelaMASà10pôles
Fréquence(Hz)lmX _ (Ω) smX _ (Ω) sK
13.3 15.9 15.43 0.977.15 7.95 7.72 0.971
8*@* : #, '-
88**@@**;;** Les harmoniques temporels ont plusieurs origines et leurs rangs s’étendent sur une large
gamme de fréquence. Le convertisseur statique génère des harmoniques dont la gamme defréquence dépend de sa conception et dumode de découpage et sont généralement de rangsélevés.Si laformede la tensionest imposée, lesharmoniquesdebassesfréquencesducourantliésàlasaturationetceuxdefréquencesplusélevéesliésàladenturerotoriquesapparaîtrontdanslespectreharmoniquedecourant.
L’évaluationdespertesJoule,rotoriquesnotamment,duesauxharmoniquesdetempsestunautreaspectqu’il fautconsidérerpourprédire l’impactsur lamachineasynchrone,notamment,surleséchauffementsadditionnels.Pourcefaire,ilestnécessaired’établirunmodèlepermettantune estimation rapide des pertes avec une bonne précision, car les méthodes de calcul parélémentsfinistenantcomptedel’évolutioninstantanéedesgrandeurssontlourdesentermesdetempsdecalcul.
Dans cette étude, nous considérons la forme de tension imposée par l’onduleur, sansrégulation de courant. Elle est fournie par Converteam Belfort. Nous utiliserons un modèleanalytique permettant de déterminer les harmoniques de courants. À l’aide de ce modèle, onreconstituelaformed’ondeducourantetdéterminelespertesJouleduesaudécoupage.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
108
Les paramètres de ce modèle doivent être identifiés par un calcul numérique utilisant leséléments finis. Cela consiste à considérer la géométrie totale de la machine et résoudre leséquationsquirégissentladiffusionduchampélectromagnétiquedanslesdifférentsmatériaux.
88**@@**<<** !)#: 'Lesondesduesauxharmoniquestemporelsducourantderangsuffisammentélevéstournent
àdesvitessestrèsélevéescomparéesàlavitessedurotorquiestde170tr/mn.Lesharmoniquesdetensionàconsidérerdansnotreétudesonténumérésplusloindanscechapitre.Lafréquencede hachage df est au voisinage de 900Hz et la fréquence du fondamental sf ne dépasse pas30Hz.Commenousl’avonsrelatédanslechapitreII,enraisondelanaturedelaMLIadoptée,lesfréquencesdesharmoniquesquisubsistentsontdelaforme sdsth fkfkfhf
t±== ' ==AA;;>>.
Le glissementdu rotorpar rapport à l’onde crééepar cesharmoniquesde temps th et desharmoniquesd’espace sh s’écrira:
−=
−=
s
m
t
s
sst
mssthh
f
f
h
h
fhh
ffhhg
st1
)(
)(, (III.33)
Avec sm fgf )1( −= ,et mf étantlafréquencederotationdurotor.
Les harmoniques de temps th de laMLI sont de rang très élevé, devant des harmoniquesd’espace sh de rang plus faibles, ce qui se traduit par un rapport ts hh / très faible (<<1). Del’expression(III.33),onpeutconsidérerquelamachineestàl’arrêt( 1=g )pourlesharmoniquesdetempsderangsélevés.Notonsquelespertesduesàl’interactiondesharmoniquesdetempsavec les harmoniques d’espace sont très faibles car leurs taux respectifs sont de l’ordre dequelques%deleursfondamentauxrespectifsetleurproduitestnégligeable.Néanmoins,lorsducalculparélémentsfinissansdécompositionspectrale,lesharmoniquesd’espacessontprésentsetonleuraffectetous,lemêmeglissement( 1=g ).
88**@@**88** )#
Un autre phénomène à prendre avec beaucoup de précaution, est la densité de maillagenécessaire pour une bonne prise en compte de l’effet de peau. En effet, il faut que la taillemoyenne des éléments dumaillage soit aumoins 3 à 4 fois plus petite que la profondeur depénétration rf µσµπδ 0/1= .Dans lecasquinousconcerne,nousavonscalculé laprofondeurdepénétrationdans lesbarresen fonctionde la fréquence (figure (3.18.a)).Unmaillage finestnécessaire pour simuler correctement cette situation. L’inconvénient de cette démarche résidedansl’augmentationdunombredenœudsdumaillageet,parconséquent,l’allongementdutempsde calcul. Une solution pour réduire le temps de calcul consiste à subdiviser chaque barrerotoriqueenplusieurscouchesd’épaisseursdifférentes,permettant ainsid’attribuerunedensitédemaillagedifférente à chaque couche (figure (3.18.b)).En effet, dans lamesureoù l’effet depeauestplusconcentrésurlasurface,ilestdoncplusadéquatdemaillerfinementauvoisinagedecettedernière.Cemodèleestétablipourdéterminer lespertes Joule totalesdans la cageenfonctiondelafréquenced’alimentationpouruncourantdonnéetdedéterminerlavariationdecertainsparamètresdumodèleenfonctiondelafréquence.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
109
(a) Profondeurdepénétration (b)maillageadopté
Figure3.18:Maillageadopté(b)enfonctiondelaprofondeurdepénétration(a)
88**@@**??** :!9La tension de phase j , appliquée aumoteur, ayant un spectre riche en harmoniques, peut
s’écriredemanièresuivante:
∑
+
=
ϕ−−π
−ωϕ−−π
−ω
t
vttt
t
v
h
)h)j(
hth(i
sh
))j(
t(i
ssj eVeV)t(V11
3
12
3
12
1 R eR e (III.34)
Lepremiertermededroitereprésentelefondamental,alorsquelesecondenglobelafamilledes harmoniques de temps. La détermination des courants nécessite un modèle dont lesparamètresdépendentàlafoisdelasaturationmaisaussidelafréquence.
Compte tenude la valeurdu fondamentalpar rapport à chaqueharmonique, il participedemanière essentielle à la saturation et on peut considérer l’hypothèse que la saturation estprincipalementimposéeparlefondamental.
D’un autre côté, bien qu’au point de fonctionnement, le glissement avoisine 0.9% pour lefondamental,nousavonsmontré,pourlesharmoniquesdetemps,queleglissementestramenéà1.
Ce qui conduit à définir deux types de modèles circuits, l’un représentant le fondamental,l’autre, dédié aux harmoniques de temps, les paramètres de ce dernier étant fonction de lafréquence(figure(3.19)).Ilestpossibled’extrairelesparamètresduschémaéquivalentvariantenfonctiondelafréquence.Pourlesraisonsindiquéescihaut,nousprendronsuneseulebrancheaurotorincluantleseffetsdetouslesharmoniquesd’espace(figure(3.19)).
Pourdéterminerlesparamètresdecemodèle,nousadoptonsleshypothèsessuivantes:
• L’inductancemagnétisante mL varieavecleniveaudesaturationmaiselleestpeusensibleàlavariationdelafréquence.• Les autres paramètres sont considérés comme indépendants du niveau de saturation.Cettehypothèse,commenousallonslevoirn’estpastoutàfaitvraie.• Larésistanceainsiquel’inductancedefuiterotoriquesvarientfortementaveclafréquence• Larésistanceetl’inductancedefuitesstatoriquessontconsidéréescommeinvariantavecla fréquence.Cettehypothèsebienqu’établiepour lesmachinesde faiblespuissances,elle restenéanmoins moins évidente pour les machines de fortes puissances (l’effet de peau dans lesconducteurs à sectionsélevées),des approchesanalytiquesexistentpour lapriseencompteduphénomène de l’effet de peau dans des encoches ouvertes munies de plusieurs conducteursrectangulaires==66AA>>==6666>>==66BB>>:

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
110
sR
gRr /′
tbjX fejXrXj ′
mjX1sV
1sI
sR
)( fRr′
tbjX fejX )( fXj r′
*mjX)( fVs
)( fI s
)( fZop
(a)Fondamentaldetemps (b)Harmoniquedetemps
Figure3.19:Modèlecircuitéquivalent
8*@*?*;* #:!#!
Lemodèlecircuit«harmoniquedetemps»,permetdedéterminer lescourantsharmoniquesconnaissantlesharmoniquesdelatensionsource.Connaissantlemoduleet laphasedechaqueharmoniquedetensiondefréquence déduitde l’ondedetensionduconvertisseurstatiqueonpeutalorscalculerl’amplitudeetlaphaseducourantcorrespondant.Cecipermetdeconstruirelespectre des courants absorbés par la machine et de reconstituer le courant instantané. Lapuissancedissipéedanslesrésistancesreprésentelespertessupplémentairesrotoriquesduesauxharmoniquesdetemps.
L’établissementdecemodèleesteffectuéenplusieursétapesquel’ondécritbrièvementdanscequisuit:
• Un premier calcul en magnétostatique permet d’obtenir l’inductance de fuites desencochesstatoriques feL .
• Unsecondcalculenlinéaire,enimposantuncourantunitaireetàglissementnul,permetd’obtenir l’inductancemagnétisante mL en fonctionde la fréquence [ ]HzHzf 30001 −∈ ,ceci permet de justifier l’hypothèses de l’indépendance de ce paramètre vis*à*vis de lafréquence(figure(3.49)).
• Un calcul à glissement et courant unitaires en linéaire, permet d’obtenir l’impédanceopérationnelle )( fZop enfonctiondelafréquence [ ]HzHzf 30001 −∈
( )( ))()()(
)()()()()(
fXfXjfR
fXjfRfXjfXjfZ
rmr
rrmfeop ′++′
′+′×+= (III.35)
où mm LjX ω= L’expression(III.35)peutsemettresouslaformesuivante:
( ) )()(
1
)()(
1
)(
1
fXjfZfXjfRfXj feoprrm −=
′+′+ (III.36)
• Connaissant l’inductance magnétisante mL , on déduit les valeurs de la résistance etinductancedefuiterotoriques( )(' fR r , )(' fL fr )enfonctiondelafréquenceàpartirdes
relations(III.37):
[ ][ ]
[ ][ ]
−+
×+=′
−+
×+=′
)f(Z)f(X)f(Xj
)f(X)f(Zj)f(X)f(X
)f(Z)f(X)f(Xj
)f(X)f(Zj)f(X)f(R
opmfe
mopfer
opmfe
mopfer
Im
R e
(III.37)
• Une fois tous les paramètres identifiés, connaissant la tension du rang harmonique detemps(amplitudeetdéphasage),onpeutdéduirevialemodèlecircuitdesharmoniquesdetemps,lesamplitudesetlesdéphasagesdescourantsstatoriquesetrotoriques

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
111
• Connaissantlesamplitudesetlesdéphasagesdesdifférentscourants,onpeutreconstituerles formes d’onde du courant statorique et rotorique (ramené au repère triphaséstatorique)
)h
)j(thcos(I)t(i tsht
h
shsj t
t
t 3
21
π−−ϕ−ω=∑ (III.38)
)h
)j(thcos(I)t(i trht
h
rhrj t
t
t 3
21
π−−ϕ−ω=∑ (III.39)
• Onpeutainsireconstituerlaformed’ondeducoupleentenantcomptedesharmoniquesdetempsparlarelation(III.40)ausensdupremierharmoniqued’espace:
( ))t(i)t(i)t(i)t(ipL)t( qrdsdrqsme −=Γ (III.40)
)i,i( qsds et )i,i( qrdr sontlescomposantesd’axedirectetenquadraturedescourantsstatoriques
etrotoriques.
8*@*?*<* #
On suppose que le niveau de saturation est imposé uniquement par l’onde fondamentale
généréepar le fondamentalducourantdans lebobinage statorique (comportantun faible tauxd’harmoniques). En considérant que les amplitudes des harmoniques de courant magnétisantrestentrelativementfaiblescomparéaufondamental,onpeutsupposerque lesharmoniquesdecourant font varier linéairement le flux autour d’un point de fonctionnement imposé par lefondamentaldecourantcommel’illustrelafigure(3.20).
La détermination de la réactancemagnétisante mX en fonction du niveau de saturation esteffectuée à glissement nul, en faisant varier le courant magnétisant, la valeur de la réactancemagnétisanteretenueestcelleobtenuepourlecourantmagnétisantabsorbéà 0=g .
• Pourlemodèlecircuitdufondamentaldetemps,onutilisel’inductancemagnétisantedite mmm IL /φ= ,définiecommeétantlapentepassantparlespointsetdelacourbedelafigure(3.20).• Pourlemodèlecircuitdéfinipourlesharmoniquesdetempsderangsupérieur,onutilise
la réactancemagnétisante **mm LjX ω= . L’inductancemagnétisante *
mL est définiecommeétantlapentedelatangenteàlacourbepassantparlepointdefonctionnement).Cettedernière,enprésencedepetitesvariationsautourdupointdefonctionnement,peutêtredéfinie
paruneinductanceincrémentaletellequem
m
m
mm
IIL
∆
∆≈
∂
∂=
φφ* .

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
112
0 200 400 600 800 1000 1200 0
10
20
30
40
50
60
70
Im [A]
A
φφ φφm
[Wb
]
o
mL
*
mL
Figure3.20:Définitiondel’inductancedynamiqueetstatique
Pour obtenir la valeur de l’inductance magnétisante dynamique utilisée dans le modèle de
circuit(harmoniques),oncalculeàglissementnul,lavariationdufluxmagnétisantenfonctionducourant magnétisant (à g=0). Connaissant le courant magnétisant absorbé à tension fixe et àglissementnulonpeutdéduirelesinductancesstatiquesetdynamiquescorrespondantes.
Un autre point important, déjà abordé dans l’étude de la machine à aimants permanents,concerne l’inductancede fuited’encochesouvertes (casdu stator), celle*ci en absencede calesmagnétiques est souvent considérée comme indépendante de la saturation. Toutefois, enprésencedescalesmagnétiques,cettehypothèsen’estpasvérifiée.
Unecampagnedesimulationsenrégimesaturéetenfaisantvarierlecourant,nouspermetdevérifier le comportement de l’inductance de fuite d’encoches feL . La figure (3.21) montre
l’évolution de feL lorsque les ouvertures d’encoches statoriques sont munies de cales
magnétiques et amagnétiques.On remarque clairement que la présence des calesmagnétiquesmodifie le comportement de l’inductance de fuite d’encoches qui devient fonction de lasaturation.Naturellement,enabsencede lasaturation, l’inductancede fuite feL nevariepaset
resteindépendanteduniveaudesaturation.
Figure3.21:Evolutiondel’inductancedefuiteenfonctionducourant

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
113
8*@*?*8* )9)
Commenousl’avonsmentionnéaudébut,l’inductancedefuiteetlarésistancerotoriquessont
calculéesparEFsurunegammede fréquence [ ]HzHzf 30001 −∈ .En raisondes limitationsenmaillage et du temps de calcul important découlant d’unmaillage trop fin, la gamme des trèshautesfréquences(>3000Hz)nepeuventpasêtreconsidéréeslorsducalculdesparamètresenfonctiondelafréquence.
Pourcontourner leproblème,unepremièresolutionconsisteàmodéliser l’effetdepeauparun coefficient de Kelvin calculé analytiquement qui est affecté aux inductances et résistancescalculéesencontinu,dontleplusconnuestceluiformulésurlabased’uneencocherectangulaireouverte==6677>>.Toutefois,cesformulationssimplesnesontpasvalablespourn’importequelformed’encoches.
Habituellementonpeut calculer analytiquement les fuitesd’une encoche rectangulaire ayant
cN conducteurs disposés en hauteur sous certaines hypothèses et à fréquence nulle à l’aide del’expression==66CC>>:
)2
2
13
1(2
0b
h
b
hLNL ucfe += µ (III.41)
En continu, les inductances de fuites calculées analytiquement concordent avec cellesobtenues par éléments finis dans les conditions illustrées sur la figure (3.22), sur un modèlesimple représentant deux encoches alimentée par un courant unitaire (aller et retour). Cesconditions de simulation permettent de se rapprocher d’une répartition des lignes de fluxpénétrantl’encocheperpendiculairementàl’axey.
Leslignesdefluxobtenuessontreprésentéessurlafigure(3.23)pourtroisformesd’encoches.
Figure3.22:Conditionsdesimulation

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
114
(a)encochequasifermée (b)encochesemi*fermée (c)encocheouverteFigure3.23:Modèled’encochesrectangulairesetlignesdefluxàfréquencenulle
À fréquenceélevée, le courantne sedéveloppepasdemanièreuniforme, l’effetdepeau se
manifested’autantplusque la fréquenceest élevée.Danscecas,ondéfinithabituellementdescoefficients de Kelvin relatifs aux fuites et à la résistance définis dans le cas d’une encocheouverteayantuneouvertureb etunehauteur eh par==66CC>>==BB77>>:
−
+=
−
−=
)2
cos()2
cosh(
)2
sin()2
sinh(
)2
cos()2
cosh(
)2
sin()2
sinh(
2
3
δδ
δδδ
δδ
δδδ
ee
ee
ekr
ee
ee
ekf
hh
hh
hK
hh
hh
hK
(III.42)
Les résistanceset les inductancesobtenuesencontinuaffectéesdecescoefficientsdonnentl’évolutiondesinductancesetdesrésistancesenfonctiondelafréquence.
=
=
)()0()(
)()0()(
fKLfL
fKRfR
kf
kr
(III.43)
Le taux d’ouverture du becquet au niveau de l’encoche rotorique a un effet significatif surl’évolutiondesparamètresrotoriques.Lesencochesutiliséesdansnotrecasétantsemifermées,ilestnécessairedeformulerlecoefficientdeKelvinentenantcomptedel’ouverturedel’encoche(ouverte,semi*ferméesoufermées).Danscetteoptique,onafaitvarierl’ouvertured’encocheducas où elle est quasi*fermée au cas où elle est ouverte dans lemodèle de la figure (3.22). Parailleurs,onafaitvarierlafréquencedansunegammeallantde0à1000Hz.Lecalculdel’énergiedans les encoches permet d’obtenir la valeur de l’inductance de fuite, les pertes Joule dans lesencochespermettentd’obtenirlarésistancerotorique.Lesrésultatssontcomparésàl’inductancede fuite calculée analytiquement par l’équation (III.41) et corrigée par le coefficient deKelvinrelatif kfK et krK définisdans(III.42).
La figure (3.24.a) montre l’évolution de l’inductance de fuites dans le cas d’une encocheouverte.Comparé aux résultatsde simulation, les résultats analytiques sont quasi concordant atrès faibles fréquences, toutefois on note une grande différence entre les deux résultats auxfréquences élevées en termes de valeurs, bien que l’évolution hyperbolique soit quasiment lamême,l’inductanceparcalculanalytiqueest2.5foisplusfaiblequecelleobtenueparEF.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
115
(a) (b)
Figure3.24:Evolutiondel’inductancedefuitesetdelarésistanceenfonctiondelafréquence(casd’uneencocheouverte)
Lafigure(3.24.b)montrequelarésistancecalculéeparEF,concordeparfaitementaveccelle
calculée analytiquement (résistance en continu affectée du coefficient de Kelvin relatif à larésistance krK ). La formulation analytique du coefficient deKelvin relatif à la résistance rendbien compte de l’évolution de la résistance en fonction de la fréquence pour une encocheouverte,cequin’estpaslecaspourlecoefficientdeKelvinrelatifauxfuites.Celanepeutêtredûqu’auxhypothèsesstipulantqueleslignesdefluxentredemanièreperpendiculaireduferversleconducteuretsonttangentiellesàlasurfaceduconducteurauniveaudel’ouvertured’encoche.
Lafigure(3.25)présentel’évolutiondel’inductancedefuiteenfonctiondelafréquencemaisaussienfonctiondel’ouvertured’encoche.Onobservebienquel’inductancedefuitediminueenhautesfréquencesavecl’augmentationdel’ouvertured’encoche.
(a)variationdel’ouvertured’encoche (b)encochequasi*fermée
Figure3.25:Evolutiondel’inductancedefuites(parsimulation)enfonctiondelafréquenceetdel’ouvertured’encoche
Lafigure(3.26)rendbiencomptedel’augmentationdelarésistanceenfonctiondelafermeturedel’encoche,cetteaugmentationestaccentuéeaufuretàmesurequelafréquenceaugmente.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
116
Figure3.26:Evolutiondelarésistanceenfonctiondelafréquenceetdel’ouvertured’encoche
La figure (3.27) montre les lignes de champs dans les encoches présentées à très haute
fréquence.Toutnaturellement,Lescourantsonttendanceàsedéplacerversl’entrefercommelemontre la figure (3.28), réduisant la section de passage conduisant ainsi à une réduction del’inductancedefuites,maisaussi,àl’augmentationdelarésistanceéquivalente.
(a)encochequasifermée (b)encochesemi*fermée (c)encocheouverteFigure3.27:Modèled’encochesrectangulaireetlignesdefluxàfréquence1000Hz
Figure3.28:Densitédecourantrelevéedansunencocheà1000Hz

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
117
L’étudemenéepermetd’affirmerquelaformulationanalytiqueducoefficientdeKelvinrelatifauxfuitespourdesencochesouvertesn’estpasapplicableàn’importequellesfréquences,encoremoins à n’importe quelle type d’encoches. La formulation analytique du coefficient deKelvinpourdesencochessemiferméesaétéabordéedans==BB;;>>,maisàl’instarduformalismeanalytiqueducoefficientdeKelvinconcernantl’encocheouvertecelle*ciprésentequelqueslimitationsàsonutilisation==BB;;>>.
8*@*?*?* #!
Uneautresolutionconsisteàdéterminer lesparamètres rotoriquesparEFsur lagammedefréquence [ ]HzHzf 30001 −∈ ,puis, approximer l’évolutiondecesparamètrespardes fonctionsquipermettraientd’approcherl’évolutiondescoefficientsdeKelvinrelatifà larésistanceetauxfuites.Ces fonctions serontpar lasuiteutiliséespourextrapolerversde trèshautes fréquencesl’évolution des paramètres rotoriques. Ce qui nous permettra d’estimer les pertes issues desharmoniqueshautesfréquencesprésentsdanslespectredetensiondelaMLI.
LescoefficientsdeKelvinrelatifà la résistanceetà l’inductancerotoriquessontapprochéesparlesfonctionssuivantes:
+==
++==
−−
=
≈
=
≈
)fb(/
fr
frX
/
r
rr
efbl
)f(l)f(K
fafaR
)f(R)f(K
2211
221
1 1
(III.44)
Lesparamètres 2121 ,,, bbaa sontdéterminésparlaméthodedesmoindrescarrés.
Lafigure(3.29)montrelaconcordancedesrésultatsdesparamètresobtenusparEFavecceuxobtenusparlesfonctionsd’approximations.
Figure3.29:EvaluationdesparamètresdelaMASà10pôlesàencochesemi*fermée88**@@**@@** /: '
Pourvaliderlaméthodeproposée,nousavonseffectuéunesériedesimulationsenutilisantlecalculévolutif(pasàpasdansletemps).
Commeonl’aprécédemmentrelaté,pourtenircompteduphénomèned’effetdepeauàunefréquence considérée, il faut ajuster le maillage en conséquence. Par ailleurs, en magnétiqueévolutif (pas à pas dans le temps), une autre contrainte réside dans la préservation del’information.Eneffet,dans lecalcul temporel, ilestnécessairedechoisirunpasde tempsdecalculsuffisammentfaiblepourpouvoirreconstituerfidèlementlafréquencelaplusélevée,pluslepasde tempsdecalcul est faible, cequiparconséquent, se traduit en régimesaturépardestempsdecalculprohibitifs.Danscettelogique,nousavonschoisidesimuleràl’aidedulogiciel
CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
118
Flux2D uniquement les harmoniques <1000 Hz, qui plus est, sont prépondérants en termesd’amplitudes.
Unautreaspect,concernelasaturation,notremodèleMHTtientcomptedelasaturationdemanièreglobaleàtraversl’inductancemagnétisantedynamique.Or,certainespartieslocales,tellesquelesisthmesd’encocheset lesbecquetssaturentplusqued’autresparties.Enayantàl’espritquel’ouvertured’encocherotoriqueaffectel’évolutiondesparamètresrotoriques,ilestclairquela saturation partielle ou totale des becquets d’encoches rotoriques (encoches semi fermées)affectelecomportementdesparamètresrotoriquesetparconséquentdesamplitudesdecourantharmoniques,commenousallonslevoir.
Les4simulationssonteffectuéessurlaMASà10pôles:
a) UnesimulationparlaméthodeMHT,lesencochesrotoriquesétantsemi*fermées.
b) UnesimulationparFlux2Denlinéaire,lesencochesrotoriquesétantsemi*fermées.
c) UnesimulationparFlux2Densaturé,lesencochesrotoriquesétantsemi*fermées.
d) UnesimulationparlaméthodeMHT,lesencochesrotoriquesétantouvertes.
Lesrésultatsprésentéssurlafigure(3.30),résumentlesamplitudesdescourantsharmoniquesobtenuespourlesrangsharmoniquesconsidérés.
Lesrésultatsducas(a)sontquasisimilairesaucas(b),cequimontrequ’enlinéaire,lemodèleMHTesttoutàfaitbon.Lorsquel’onconsidèrelasaturationdanslecalculévolutif(cas(c)),onconstatequelesamplitudesdecourantssontplusimportantescomparésàcellesobtenuesparlemodèleMHT(cas(a)).Lecas(d)montrequelorsquel’onconsidèrelesencochesouvertesdansnotremodèleMHT,onobtientdesamplitudesdecourantsplusimportantes.L’interprétationestainsi:
Lorsquelasaturationintervient(localement)danslesbecquetsdesencochesrotoriquessemi*fermées,celacetraduitparuneouvertured’encocheeffectiveplusimportanteconduisantàdesvaleursplusfaiblesdesparamètresrotoriquesàfréquencesplusélevées.Lamachineasynchroneétantalimentéeentension,lecourantharmoniqueissudelatensionharmoniqueconsidéréeest,du fait des paramètres rotoriques plus faible, plus important (figure (3.31.c)). Toutefois, lasaturationn’intervientpas sur la totalitédesencoches rotoriquesni sur la totalitédesbecquetsd’encochesrotoriques,pourcetteraison,lesamplitudesdecourantssontmoinsimportantesquecellesoùl’onconsidèrequelesencochessontouvertesaveclemodèleMHT.
La carte de champs de la machine asynchrone à 10 pôles pour deux instants différents,indiquéesurlafigure(3.31)représentantlecas(c).Onobservequecertainesencochesrotoriquesne sont pas saturées et que d’autres sont saturées sur un becquet de l’ouverture d’encoche(indiquéesparuncercle). Il est clairque lecomportementdesparamètres rotoriques se situeraentre le cas d’une encoche rotorique semi fermée étudiée et le cas d’une encoche rotoriqueouverte.Lafigure(3.32)montrelesformesd’ondeducas(a)etducas(c).Onconstatequemalgréle
fait que la saturation locale ne soit pas considérée dans le cas (a), il n’empêche que la formed’onde du courant absorbé est quasi similaire à celle obtenue par le calcul évolutif (cas c) enrégimesaturé.Ladifférencedesamplitudesducourantestde3.5%.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
119
0
2
4
6
8
10
12
Am
plitu
de
[A
]
55 61 65 67
Rang Harmoniques
(a) (b) (c) (d)
Figure3.30:PrincipauxharmoniquesdecourantdelaMASà10pôles
Figure3.31:CartesdechampspourdeuxinstantsdifférentsdelaMASà10pôles

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
120
-1500
-1000
-500
0
500
1000
1500
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08
Temps[s]
Am
pli
tud
e[A
]
MHT
Flux2D
MHT
Flux2D
Figure3.32:Formed’ondeducourantdelaMASà10pôles
(1)Semianalytique (2)EF
(a)MASà8pôles
(1)Semianalytique (2)EF
(b)MASà10pôlesFigure3.33:Formed’ondeducoupledelaMAS
Par ailleurs, pour valider laméthode de calcul du couple, nous avons comparé les formes
d’ondesdu coupleobtenuespar laméthode semianalytique avec cellesobtenuespar éléments

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
121
finisenpasàpasdansletemps.Lestauxd’ondulationsducouplesontrésumésdansletableauci*dessous
Tableau3.6:Tauxd’ondulationducouple5)#R3R
Semianalytique Elémentsfinis
MAS8pôles 5.1% 5.71%
MAS10pôles 3.9% 4.59%
On observe une relative différence entre les résultats obtenus par éléments finis qui font
apparaîtreuntauxd’ondulationducoupleplusimportantqueceluiobtenuparlaméthodesemianalytique.On peut expliquer cet écart par le fait que lemodèle semi analytique ne tient pascomptedelasaturationdesbecquets.
Tableau3.7:Tauxdesrangsharmoniquesdestemps(dusauvariateur)ducoupleRangharmonique Semianalytique Elémentsfinis
TauxdesrangsharmoniquesdelaMASà8pôles
72 0.39% 0.4%
78 0.94% 0.95%
84 0.9% 1.65%
TauxdesrangsharmoniquesdelaMASà10pôles
54 0.29% 0.3%
60 0.77% 0.9
66 0.7% 1.2%
En effet, comme nous l’avons précédemment fait remarquer, la saturation des becquetsdiminue l’inductance de fuite rotorique, ce qui favorise l’augmentation des harmoniques decourantetdoncducouple.D’autrepartonnetientpascomptedesharmoniquesdelastructure(denture rotorique) ni des harmoniques de saturation dans le modèle semi analytique, quiintroduisentdesharmoniquesdecouplesupplémentairesetdonc untauxd’ondulationducoupleplusimportant.Lapertinencedumodèlesemianalytiquerésidedansletempsdecalculquiestdel’ordredequelquesheuresalorsquelemodèleélémentsfinispasàpasdansletempsest de l’ordre de quelques jours. Dans une machine relativement bien dimensionnée pourminimiser la contribution des harmoniques d’espaces, des harmoniques de structures(harmoniques de dentures) et des harmoniques de saturation, lemodèle semi analytique suffitpourdonnerl’ordredegrandeurdelacontributionharmoniquesduvariateur,avecpourcequinousconcerneuneerreurn’excédantpas15%.
Le tableau (3.7) résume les taux des principaux rangs harmoniques du variateur, l’analysespectralemontrequelesrangsharmoniquesducoupleobtenuparlaméthodesemianalytiqueontuntauxrelativementvoisindeceluiobtenuparl’analysespectraleducoupleparlaméthodedesélémentsfinis..Lesrangs84decouplepourlaMASà8pôles(resp.rang66pourlaMASà10

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
122
pôles)sontissusdel’interactiondedeuxrangsharmoniques,83et85(resp.65et67pourlaMASà 10 pôles) avec le fondamental ce qui explique le grand écart entre les valeurs obtenues parélémentsfinisetparlaméthodesemianalytique.L’erreurcommiseennetenantpascomptedelasaturationdesbecquetsavraisemblablementuneffetadditifdanslecasquinousconcerne.
8*A* S9 : # )#
Nous avons présenté dans la section précédente, des méthodes permettant le calcul desperformances de la machine asynchrone (MAS) de fortes puissances. Dans ce chapitre, leproblèmede dimensionnement et d’optimisation de lamachine à cage, destinée à l’applicationmarineparPOD,estabordée.
Dans un premier temps le modèle mono harmonique est utilisé pour un premierdimensionnement.Profitantainsidesarapiditéd’exécution,uneétudeexhaustiveestmenéepourdifférentespolaritésetdifférents typesdebobinage.Cettepremièreétudepermetdemettreenexergue, pour chaque polarité, la machine permettant d’atteindre les performances et lescontraintesénuméréesdanslecahierdescharges.Unecomparaisondesperformancesestensuiteeffectuéepourdégagerlaoulespolaritésoffrantdemeilleuresperformancesavec,enmémoire,l’objectifdeserapprocherdesperformancesdelaMSAP.
Sur les candidates retenues, une étude plus approfondie est menée. Le modèle multiharmoniqued’espace (MHE)estappliquésur lesMASretenues.Cemodèlepermetd’affiner lecalcul en tenant compte de l’effet des harmoniques de bobinages. Les performances sontréajustéesenconséquenceetlespertesduesauxharmoniquesdebobinagessontévaluées.
Lemodèlemultiharmoniquede tempsestpar la suite appliqué sur lesMASretenues,dansl’objectifd’évaluerlespertesduesauxharmoniquesdetempsissuesdelaMLI.
Deux types de bobinages sont considérés, il s’agit des bobinages à pas de raccourcissement12/15ème et 10/12ème. Les paramètres géométriques sont alors ajustés demanière à obtenir lesmeilleures performances. Les critères de comparaison qui nous semblent pertinents et surlesquelsnousavonsmenénotreétudesont:• Facteurdepuissance(cosϕ)• Rendement(η)• Leproduit(η.cosϕ):• Valeurefficaceducourantdephase(A)• PertesJoulestatoriques• PerteJoulerotoriques• Pertesfer• Masse(kg)• Couplevolumique• Diamètreextérieur• Températuredanslesconducteursstatoriques
88**AA**;;** 1:Lemodèlemono*harmoniqueestutilisépourladéterminationd’unegrandepartiedescritères
cités cihaut.Toutefois, certainesgrandeurs sontdéterminéesenutilisantunautre logiciel semianalytique. En effet, l’étude thermique est effectuée avec un programme développé parConverteam==BB<<>>.L’évaluationdelatempératureestfaiteenconsidérantquelemoteurestouvert,queledébitd’airàl’intérieurdespartiesactivesestconstant,àvitesseconstante(faiblevitesse)et

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
123
à pertes mécaniques constantes. La transmission de chaleur entre les différentes parties esteffectuéeencombinantlesmécanismesdeconductionetdeconvexion.
Parailleurs,bienquelacomparaisonnesoitpasprésentéeici,lesrésultatsobtenusàl’aidedesdeuxoutilsdecalculsont,àquelquesexceptionsprès,quasiconcordants==BB88>>.
Ladémarched’optimisationconsisteàtrouverpourchaquepolarité, lagéométrie"optimale"permettant d’atteindre les performances requises, puis comparer les différentes machines, depolaritésdifférentes,entreelles.Letableau(1.4)duchapitreIrésumelescritèresdeperformancesetdescontraintesàrespecter.
• :D!!
Plusieursaspectsontétéconsidérésetquiinteragissententreeux:lalimitationendensitédecourant,leslimitationsendimensionsd’encochesetdeconducteurs,lescontraintesdemisesenoeuvredesbobineslorsdelafabrication,latempératureadmissibleaucôtédesautrescontraintesdeperformances.Touscesparamètresontrégislechoixdesdimensionsgéométriques.
Pourlesmachinesdegrandespuissances,lenombred’encoches(statoriquesetrotoriques)estunparamètreimportantcarilauneffetnonnégligeablesurlecoûtdefabrication.
Pour chaque polarité, le nombre d’encoches statoriques est défini de sorte que l’on puisseréaliserlebobinagechoisidansunsoucideréductiond’harmoniqued’espace.Lesrèglesdechoixdu nombre de barres rotoriques, déjà présentée, conduisent à définir une certaine plage danslequel on choisi le nombre d’encoches rotoriques en relation avec la polarité et les encochesstatoriques.Lafigure(3.34)montre,infine,lescombinaisonsdunombred’encochesstatoriquesetdunombred’encochesrotoriquesadoptéespourchaquepolarité.
160
128
162
135
100
81
102
150120
144120
9672
96
0
20
4060
80
100
120
140160
180
20 16 12 10 8 6 4
Nombre de pôles
Nombre d'encoches statoriquesNombre d'encoches rotoriques
Figure3.34:Nombred’encochesstatoriquesetrotoriquesenfonctiondelapolarité
Dansunsoucidemaintenirunencombrementquasiconstant, la longueuraxialeétantfixée,nousavonsessayédefairevarierfaiblementlerayonextérieur.Etantdonnéqueàvitessedonnéela fréquenced’alimentationdiminueavec lenombredepôles,pour lesmachinesdeplus faiblepolarité nous avons autorisé un niveau d’induction plus élevée (diminution des hauteurs desculasses).Toutefois,lavariationdelapolaritéconduitàunefortevariationdurayond’alésage.Lafigure(3.35)présentelesrayonsexternesetlesrayonsd’alésagesretenuspourchaquepolarité.Lerayonextérieurdes"machinesoptimisées"nevariequede5%alorsquelerayond’alésagesubitunevariationallantjusqu’à25%.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
124
945 945 945 900 900 900 925
775 765 755 700 665 620 620
0
200
400
600
800
1000[m
m]
20 16 12 10 8 6 4
Nombre de pôles
Rayon d'alésage Rayon externe
Figure3.35:Rayonsd’alésageetexterneenfonctiondelapolarité
Le nombre de spires (en série par voie parallèle) par phase est principalement régit par latension d’alimentation. Néanmoins, d’autres contraintes contribuent de manière indirecte auchoix dunombre de spires et l’optimisation de chaquemachine nous conduit à faire varier ceparamètre.Lafigure(3.36)indiquel’évolutiondunombredespiresparphases.Globalement,lavariation du nombre de spires par phase avoisine 26%. La plus grande variation est observéepourlamachineasynchroneà4pôles.
70 70 7280
72 7688
0
10
20
30
40
50
60
70
80
90
20 16 12 10 8 6 4
Nombre de pôles Figure3.36:Nombredespiresenfonctiondelapolarité
Les dimensions et le nombre de barres rotoriques ont une influence sur la pente de lacaractéristique du couple dans sa partie stable.D’un point de vue dumodèle externe, elle estreprésentéepar la résistance rotoriqueetdemanièregénérale, l’action sur lesdimensionsde labarremodifielepointdefonctionnement(leglissement)permettantdefournirlecouplerequis.Cependant,desconsidérationstechnologiquesetéconomiqueslimitentl’actionsurceparamètre.
La figure (3.37) montre la hauteur des barres rotoriques adoptée pour chaque polarité. Lavariationdelahauteurnedépassepas17%.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
125
60 60 60 65 65 65 70
0
10
20
30
40
50
60
70
[mm
]
20 16 12 10 8 6 4
Nombre de pôles Figure3.37:Hauteurdelabarreenfonctiondelapolarité
L’analyse des histogrammes précédents permet d’avancer que la variation de la polaritén’affectepasdemanièresignificative lagéométrieglobale (rayonexternenotamment)mais ellejoueunrôleimportantdanslenombred’encochesstatoriqueset,parconséquent,surlenombred’encochesrotoriques.Lapremièreobservationquiendécouleestquelesmachinesdegrandespolaritésserontbeaucouppluscoûteusesàmettreenoeuvrequelesmachinesàfaiblenombredepôles.Néanmoins,lecoûtn’étantpasleseulcritère,nousallonsnousintéresserdanslaprochainesectionauxperformancesélectriquesetthermiques.
• ##
La première observation concerne l’amélioration du facteur de puissance et du rendementavecladiminutiondunombredepôles(figure(3.38)).Lacomparaisonentermederendementoudu facteurdepuissance séparémentnepermetpasdemettreen évidence leur influence. Il estplusjudicieuxd’établirunecomparaisonsurlecritèreduproduitdurendementparlefacteurdepuissance, qui donne l’information sur le courant absorbé. En effet, pour rappel, à puissancemécanique uP etàtensionconstante sV ,lecourantabsorbépeuts’écriredelamanièresuivante:
ϕη cos3 s
us
V
PI =
Ainsi, la figure (3.38) montre l’amélioration du produit ϕη cos avec la diminution de lapolarité,celaapourconséquence,ladiminutionducourantabsorbécommeonpeutleconstatersurlafigure(3.39).
0,70
4
0,75 0,
835
0,84
7
0,85
8
0,87
2
0,90
9
0,70
2
0,76
3 0,86
3
0,87
5
0,89
2
0,91
5
0,96
3
0,96
8
0,97
0,97
5
0,97
4
0,97
6
0,97
6
0,97
3
0
0,2
0,4
0,6
0,8
1
1,2
20 16 12 10 8 6 4Nombre de pôles
Produit (Rendement, facteur de puissance) Facteur de puissance Rendement

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
126
Figure3.38:Rendementetfacteurdepuissanceenfonctiondelapolarité
10
64
,7
99
7,1
89
8
88
4
87
3,3
85
6,6
81
6,3
0
200
400
600
800
1000
20 16 12 10 8 6 4Nombre de pôles
[A]
Courant efficace absorbé par phase
Figure3.39:Courantabsorbéenfonctiondelapolarité
Lors du dimensionnement des différentes machines asynchrones, nous avons choisi dereprendrel’approcheutiliséepourlesmachinesàaimantspermanents,quiconsisteàadmettreunniveau d’inductionplus important dans les culasses pour les faibles polarités.Comparé à celuipréconisépourlesmachinesàgrandepolarité,cecipermetd’homogénéiserlespertesferentrelesmachines de différentes polarités. Toutefois, il est important de prendre en compte certainsaspects, telle que la température. En effet, pour les faibles polarités, un compromis doit êtretrouvéentre l’augmentationde la culasseet l’augmentationdespertes fer, cesdeuxparamètresagissentsurl’augmentationdelatempérature.
Lafigure(3.40)montreleszonesderelevéd’inductiondanslamachineasynchroneetlafigure(3.41) représente leniveaud’induction (max)dans lesdifférentespartiesde laMASetce,pourchaque polarité. Naturellement, le niveau d’induction est plus important au voisinage desbecquets, des cales et des isthmes d’encoches. Le niveau d’induction dans l’entrefer varie de0.85T(20pôles)à1.07T(6pôles).
Figure3.40:Endroitsderelevédeniveaud’inductiondanslaMAS

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
127
0,70,9
1,11,31,51,7
1,92,12,3
Bas
de
cula
sse
roto
rique
Mili
eu d
e cu
lass
e ro
toriq
ue
Hau
t de
cula
sse
roto
rique
bas
de d
ent r
otor
ique
Mili
eu d
e de
nt r
otor
ique
Hau
t de
dent
rot
oriq
ue
Mili
eu d
e be
cque
t
entr
efer
Mili
eu d
e ca
les
Bas
de
dent
sta
toriq
ue
Mili
eu d
e de
nt s
tato
rique
Hau
t de
dent
sta
toriq
ue
Bas
de
cula
sse
stat
oriq
ue
Mili
eu d
e cu
lass
est
ator
ique
Hau
t de
cula
sse
stat
oriq
ue
Ind
uc
tio
n m
ax
[T
]
20 pôles 16 pôles 12 pôles 10 pôles 8 pôles 6 pôles 4 pôles
Figure3.41:Niveaud’inductiondanslaMASenfonctiondelapolarité
Leglissementaupointde fonctionnementnominal à tendanceà augmenter avec lapolarité(figure(3.42)).
Lecouplevolumiquevariepeuaveclapolarité(figure(3.43)),cequimontrequelatentativedemaintenirunniveaud’encombrementrelativementidentiqueestatteint,exceptépourlecasdelaMASà4pôlesqui,enraisondesperformancesexigées,nepermetpasd’atteindre lesobjectifsavecl’encombrementrequisnotammentlacontraintedenepasdépasser2mètresdediamètres.
0,8
7
0,9
1 0,9
1
0,9
5
0,9
4
1,3
4
1,4
5
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
[%]
20 16 12 10 8 6 4Nombre de pôles
Figure3.42:Glissementaupointdefonctionnementenfonctiondelapolarité

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
128
46
,24
52
,06
52
,17
52
,35
51
,55
51
,67
51
,26
43
44
45
46
47
48
49
50
51
52
20 16 12 10 8 6 4
Nombre de pôles
[kN
/m²]
Figure3.43:Couplevolumiqueenfonctiondelapolarité
Lespertessontrassembléesdanslafigure(3.44).Bienquelecourantabsorbédiminueavecladiminution de la polarité, cela n’entraîne pas une diminution des pertes Joule statoriques enraison,notamment,de la longueurdes têtesdebobinesqui augmenteavec ladiminutionde lapolarité
LeglissementétantliéauxpertesJoulerotoriques,onconstatequeleurallureestàl’imagedecelleduglissement.
Les pertes fer étant quasiment liées au carré de la fréquence elles ont tout naturellementtendanceàdiminueravecladiminutiondelapolarité.
13
8,4
453,4
8
85,05
14
455,9
2
69,87
12
5,4
959,7
5
54,36
14
4,3
961,9
7
43,01
12
9,8
158,9
3
46,65
14
4,2
582,5
3
41,09
23
0,7
976,6
9
30,29
0
50
100
150
200
250
300
350
Pert
es [
kW
]
20 16 12 10 8 6 4
Nombre de pôles
Pjs Pjr Pfer
Figure3.44:Principalespertesenfonctiondelapolarité
Uneffetnégatifde ladiminutionde lapolaritérésidedans l’augmentationde lahauteurdesculasses entraînant nécessairement l’augmentation de la masse (figure (3.45)). De plus, cetteculasse constitue une barrière thermique à l’évacuation des pertes Joule statoriques, entraînant

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
129
ainsi,l’augmentationdelatempératureducuivrestatorique(figure(3.46)).CetteaugmentationcetraduitparuneaugmentationdespertesJoulestatoriques(figure(3.44)).
28
99
5
25
40
5
22
56
4
20
57
5
19
87
3
19
36
6
18
68
6
0
5000
10000
15000
20000
25000
30000
20 16 12 10 8 6 4Nombre de pôles
[kg
]
Figure3.45:Massetotale(sanslaculasserotorique)enfonctiondelapolarité
12
0,5
0
12
4,5
0
111
,90
12
2,1
0
13
7,4
0
16
7,3
0
269
,80
0
50
100
150
200
250
300
[°C
]
20 16 12 10 8 6 4
Nombre de pôles
Température
Figure3.46:Températureenfonctiondelapolarité
Del’analysedesrésultatsonpeutrésumerainsi:
• Les machines asynchrones à grandes polarités (16 et 20 pôles) ont à la fois unencombrementetuncourantplusimportant.• Lesmachinesasynchronesà faiblespolarités (4et6pôles)ontune températuredefonctionnementdépassantlalimiteadmissible.• La machine à 12 pôles qui a un courant raisonnable et une température defonctionnementplusqu’acceptablemaisprésenteunencombrementrelativementimportant.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
130
Deuxpolaritéssontmisesenévidence,àsavoir, lesmachinesasynchronesà10pôlesetà8pôles.Eneffet,ellesprésententuncouplevolumiquerelativementvoisinset importantavecundiamètre externe faible (1.8m), un courant absorbé inférieur à 850A (efficaces) et des pertesprincipales relativement faibles (<250kW) avec une température au niveau des conducteursinférieureà140°A.LaMachineasynchroneà8pôlesàunavantageparticulierquirésidedanssoncourantabsorbéetsespertesquisontrelativementplusfaiblesparrapportàlaMASà10pôlesmaiselleprésenteunpoidsplusimportantetunetempératurevoisinede140°A.
Danslasuitedel’étude,onneconsidèrequelesmachinesasynchronesà8pôleset10pôles,qui semblent les plus appropriées pour rivaliser en termes de performances avec lamachine àaimantspermanentsmontéssurface.
88**AA**<<** 1: 'Pourrappel,cemodèlesertàaffinerlesperformances,enintroduisantunmoyendecalculer
les pertes dues uniquement aux principaux harmoniques de bobinages. Etant donné, que lamachine est alimentée avec un onduleur de tension.Nous avons calculé les performances desmachinesasynchronesretenues,dansunobjectifdevariationdevitesse.Connaissantlafréquencenominale nf etleglissement ng ,onfaitvarierlavitessederotationsuruneplageprédéfinieenmaintenantlapulsationrotoriquedufondamentalconstante( cteg snr =ω=ω ).
En travaillant à flux d’entrefer constant, le courant absorbé est calculé en considérantl’ensembledes impédancesetenmodélisant lespertes ferparune impédancemiseenparallèledanslabranchedufondamental.
On observe que le couple (dû au fondamental) délivré (figure (3.48)) et le courant dû aufondamental (figure (3.49)) sont quasiment constants en fonction de la vitesse, lorsque l’onmaintient un flux constant. Il en est de même pour les pertes Joule rotoriques dues aufondamental(figure(3.50)).
(a)MASà8pôles (b)MASà10pôles
Figure3.47:Evolutionducoupleàfluxconstantenfonctiondelavitesse

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
131
(a)MASà8pôles (b)MASà10pôles
Figure3.48:EvolutiondespertesJoulerotoriquesdufondamentalenfonctiondelavitesse
(a)MASà8pôles (b)MASà10pôles
Figure3.49:Evolutionducourantabsorbéàfluxconstantenfonctiondelavitesse
À flux d’entrefer constant, on retrouve bien un couple résultant et un courant absorbéquasiment constants. En effet, on retrouve un courant et un couple quasi*identiques pour lesdeuxmachines étudiées. C’est à dire que les chutes de tensions aux bornes des «impédancesharmoniques» sont faibles et n’affectent pas ou peu le courant qui est principalement dû aufondamental.
L’utilisation du modèle multi harmonique d’espace permet de quantifier l’effet desharmoniquesdebobinagesurlecouplemoyenetlespertesJoulerotoriques.Eneffet,etcommenousl’avonsvuauparagraphe(3.4),lecoupledûauxharmoniquesdebobinageestnégatifdanslazonedefonctionnementnominalede lamachine ( %2<g )etce ,quelquesoit l’harmoniqueconsidéré (figure (3.17)). Nous montrons dans la figure (3.50), l’évolution de la somme descouplesdusauxharmoniquesdebobinageenfonctionde lavitessepourunfonctionnementàfluxconstant.
Lespertes Joule rotoriquesduesauxharmoniquesdebobinagesaugmentent avec lavitesse(figure (3.51)) car la pulsation rotorique de l’harmonique considéré shrh g ω=ω n’est pasconstante contrairement à la pulsation rotorique du fondamental. Ce qui affecte à la fois larésistancerotoriqueetlesfuitesrotoriques(réactancedefuites)quivarientenfonctionde rhω .Néanmoins,leurspertescorrespondantesrestentfaiblesetsontdel’ordrede5%despertesduesaufondamental.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
132
(a)MASà8pôles (b)MASà10pôles
Figure3.50:Evolutionducoupledûauxharmoniquesdebobinageenfonctiondelavitesse
(a)MASà8pôles (b)MASà10pôles
Figure3.51:EvolutiondespertesJoulerotoriquesduesauxharmoniquesdebobinageenfonctiondelavitesse
Le tableau (3.8) rend compte des implications de la prise en compte des harmoniques debobinage sur les principales performances. En effet, la prise en compte des harmoniques debobinage dans lemodèle circuit, se traduit par une relative augmentation du glissement pouratteindrelecouplerequit(voisinagede380kNm).
Tableau3.8:Récapitulatifdesprincipalesperformances
( g ,K- sI ,- #,F- jrfP ,FT- jrhP ,FT-
:)#
10pôles 0.975 901 379 66.5 3.8
8pôles 0.93 876 381 63.5 3.2
:
10pôles 0.92 881 379 62 ****
8pôles 0.876 860 380 59 ****

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
133
Parailleurs, lecourantabsorbéarelativementaugmentéainsique lespertesJoulerotoriquesduesaufondamental jrfP .Naturellement,lespertesJouleduesauxharmoniquesd’espace jrhP ne
sontévaluéesquedanslemodèleMHE.
88**AA**88** 1: 'Nous présentons les résultats sur lesmachines à 10 pôles et 8 pôles. La forme d’onde des
tensionsdephasereconstituéesurlabasedesdonnéesConverteam,estreprésentéedanslafigure(3.52).Lesharmoniquesinjectéssontdesmultiplesdelafréquenced’alimentation.Eneffet,nousavonsreformulélesrangsharmoniquesobtenusdemanièreàvoirdesrangsdeforme γ61± .Parailleurs, la fréquence de découpage df , est choisie comme étant un multiple de trois de lafréquenced’alimentation.
Lesfigures(3.53)et(3.54)représententl’évolution«extrapolée»desparamètresrotoriquesenfonctiondeshautesfréquencesissuesdelaMLI.L’extrapolationestfaiteàl’aidedelafonctiond’approximationdescœfficientsdeKelvin.
(a)MASà8pôles (b)MASà10pôles
Figure3.52:TensionsdephaseissuedelaMLI
(a)MASà8pôles (b)MASà10pôles
Figure3.53:Evolutiondel’inductancedefuitesrotoriqueenfonctiondelafréquenceMLI

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
134
(a)MASà8pôles (b)MASà10pôles
Figure3.54:EvolutiondelarésistancerotoriqueenfonctiondelafréquenceMLI
(a)MAS8pôles (b)MAS10pôles
Figure3.55:Evolutiondel’inductancemagnétisante(statique)enfonctiondelafréquence.
L’inductancemagnétisanten’estpasaffectéepar la fréquence,commeonpeut levoir sur lafigure(3.55),obtenueenrégimelinéaire.Toutefois,l’inductancemagnétisantevarieavecleniveaude saturation comme on peut l’observer sur la figure (3.56), qui montre l’évolution desinductancesstatiqueetdynamiqueenfonctionducourant.L’inductancedynamiqueàprendreencomptedanslemodèleutilisé,pourladéterminationdescourantsharmoniques,estcelleobtenueauvoisinageducourantmagnétisantdelamachineconsidérée(8pôlesou10pôles)aupointdefonctionnement 0=g .
L’inductance statique augmente au tout début de la magnétisation puis amorce une pentedescendante,cettevariationdansL’évolutionde l’inductanceestdueaumatériauutilisépour laMAS(différentdeceluiutilisépourlaMSAP)quiprésenteunecaractéristiqueB(H)possédantautout début une pente d’évolutionmoins raide, quasiment voisine de l’évolution de la pente audessusdecoudedesaturationcommeonpeutleconstatersurlafigure(3.57).

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
135
Inductance statique
Inductance dynamique
Point de fonctionnement (g=0)
Inductance statique
Inductance dynamique
Point de fonctionnement (g=0)
(a)MAS8pôles (b)MAS10pôles
Figure3.56:Evolutiondel’inductancestatiqueetdynamiqueenfonctionducourantmagnétisant
Figure3.57:CaractéristiqueB(H)dumatériauutiliséaustatoretaurotordelaMAS
Unefoislesparamètresdumodèlecircuitreprésentantlesharmoniquesidentifiés,onobtientle spectre des harmoniques de courant à partir du modèle, auquel on injecte le spectre destensionsharmoniques(figure(3.58)).Lespectredescourantsharmoniquesconnu,ondéduitlespertesJoulestatoriquesetrotoriquesduesauxharmoniquesdetempsissusdelaMLI.Letableau(3.9)résumelespertesJoulestatoriquesetrotoriquesduesauxharmoniquesdetempsissusdelaMLI.Onconstatequelespertestotalesn’excèdentpas1.2kWpourlesdeuxmachinesretenues;ellesrestentparconséquentfaibles.
Tableau3.9:PertesJouleduesauxharmoniquesdetempsdelaMLIPertesduesauxharmoniquesdetemps MAS8pôles MAS10pôles
PertesJoulestatoriques(kW) 0.78 0.71PertesJoulerotoriques(kW) 0.42 0.33
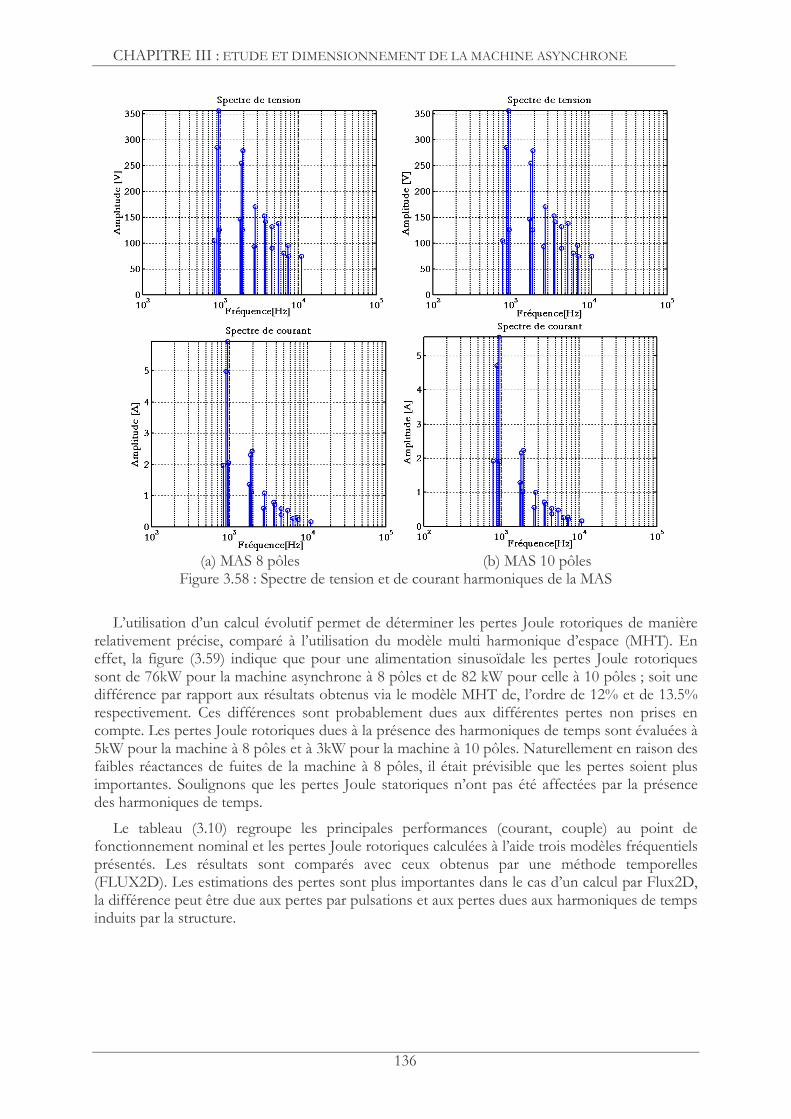
CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
136
(a)MAS8pôles (b)MAS10pôles
Figure3.58:SpectredetensionetdecourantharmoniquesdelaMAS
L’utilisationd’uncalculévolutifpermetdedéterminerlespertesJoulerotoriquesdemanièrerelativement précise, comparé à l’utilisation dumodèlemulti harmonique d’espace (MHT).Eneffet, la figure (3.59) indiquequepourune alimentation sinusoïdale lespertes Joule rotoriquessontde76kWpourlamachineasynchroneà8pôlesetde82kWpourcelleà10pôles;soitunedifférenceparrapportauxrésultatsobtenusvialemodèleMHTde,l’ordrede12%etde13.5%respectivement. Ces différences sont probablement dues aux différentes pertes non prises encompte.LespertesJoulerotoriquesduesàlaprésencedesharmoniquesdetempssontévaluéesà5kWpourlamachineà8pôlesetà3kWpourlamachineà10pôles.Naturellementenraisondesfaibles réactancesde fuitesde lamachineà8pôles, ilétaitprévisibleque lespertessoientplusimportantes.Soulignonsque lespertes Joule statoriquesn’ontpasété affectéespar laprésencedesharmoniquesdetemps.
Le tableau (3.10) regroupe les principales performances (courant, couple) au point defonctionnementnominaletlespertesJoulerotoriquescalculéesàl’aidetroismodèlesfréquentielsprésentés. Les résultats sont comparés avec ceux obtenus par une méthode temporelles(FLUX2D).Lesestimationsdespertessontplusimportantesdanslecasd’uncalculparFlux2D,ladifférencepeutêtredueauxpertesparpulsationsetauxpertesduesauxharmoniquesdetempsinduitsparlastructure.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
137
Tableau3.10:Récapitulatifdesprincipalesperformances
( sI ,- #,F- jrfP ,FT- jrhP ,FT-
:
10pôles 881 379 62 ****
8pôles 860 380 59 ****
:)#
10pôles 901 379 66.5 3.8
8pôles 876 381 63.5 3.2
:#
10pôles 890 380 70 0.5
8pôles 865 380 66 0.5
#$1U<
10pôles 896 380
8pôles 888 380
84
81
76
81
82
84
72
74
76
78
80
82
84
86
alim sinusoidale MLI
type d'alimentation
Pert
es J
ou
le r
oto
riq
ue [
kW
]
MAS 8 pôles MAS 10 pôles
Figure3.59:PertesJoulerotoriquesdanslesMASobtenuesparcalculévolutif
88**AA**??** 1D$5<
Pourlecalculdesformesd’ondesdescourantsdesdeuxmachinesretenues,nousavonsutiliséle même outil afin d’éviter d’éventuelles erreurs dues au modèles. Un calcul utilisant lamagnétodynamiqueévolutif(Flux2D)estmisenœuvrebienqu’ilestlong.Pourdesraisonsde

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
138
temps d’exécution, nous avons limité les fréquences prises en compte dans le spectre de latensionappliquéeàlamêmevaleur(1000Hz).
Tableau3.11:FréquencedeMLIconsidérée
MAS à 8 pôles
=
=
Hzf
Hzf
d
s
397.926
437.11
Mas à 10 pôles
=
=
Hzf
Hzf
d
s
026.901
302.14
Fréquences MLI
1 1 df
73 55 sd ff 8−
75 57 sd ff 6−
79 61 sd ff 2−
81 63 df
83 65 sd ff 2+
85 67 sd ff 4+
Parcontre,nousavonschoisidemaintenirlerapportentrelafréquencededécoupage df etlafréquence d’alimentation sf comme étant un multiple de 3, pour éviter de retrouver lesprincipalesfréquencesdedécoupagedanslespectredecourantcommenousl’avonsdéjàsignaléauchapitre(II).Letableau(3.14)résumelesprincipalesfréquencesdeMLIconsidéréesdansnossimulations.
Sur la figure (3.60), nous présentons les formes d’ondes des courants obtenues avec unealimentation sinusoïdale, comparées à celles issues d’une alimentation parMLI et ce, pour lesdeux machines asynchrones considérées. Les harmoniques de courants issus de la MLIn’introduisent pas de fortes ondulations du courant et la forme d’onde des courants est quasisinusoïdale.Lesondulationssontlégèrementprononcéesdanslecasdelamachineasynchroneà8pôlescarcettemachineprésentedes inductancesde fuites statoriqueplus faibles (accentuéesparlasaturationdescales).Ilenestdemêmepourlesinductancesdefuitesrotoriquesqui,sil’onregardeauniveaulocal,s’expliqueparlefaitquelesbecquetsdesencochesrotoriquessontplussaturépourlamachineà8pôlesconduisantainsiàuneouverture«magnétique»plusgrandesetraduisant par une diminution de l’inductance de fuite rotorique en haute fréquence. C’estprincipalementcesgrandeursquilimitentlescourantdehautesfréquences.
Le spectre des courants des deuxmachines est représenté sur la figure (3.61). Pour chaquemachine deux spectres, l’un en alimentation sinusoïdale et l’autre en alimentation MLI, sontsuperposés.
Lamachinesasynchrone,estalimentéeen tension, lespectredecourantauranaturellement,lesharmoniquesde temps injectés,maisaussi lesharmoniques issusde la réactiond’induit,quisont principalement les harmoniques dus à la saturation, mais aussi ceux dus à la denturerotorique.Eneffet,pourrappel,lesharmoniquesdetempsexistantsdanslescourantsstatoriquesdelamachineasynchronesontderangdelaformesuivante:
( )pNgN erph /)1(221 ληγ −±±± (III.45)
où: ,...3,2,1,0,, =ληγ
Les valeurs du glissements étant très faibles (moins de 1%) au point de fonctionnementcorrespondant à 170 tr/mn et 380kNm,onpeut doncnégliger le glissement dans l’expression(III.45).

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
139
(b)MASà8pôles (c)MASà10pôles
Figure3.60:Formed’ondedescourants(1)Alimentationsinusoïdale(2)alimentationMLI
(b)MASà8pôles (c)MASà10pôles
Figure3.61:Spectreharmoniquedescourants
La saturation étant plus prononcée dans la machine asynchrone à 8 pôles, on observenettement que l’harmonique de rang 5, dû à la saturation, obtenu lors d’une alimentationsinusoïdale,estrelativementplusimportantqueceluidelamachineasynchroneà10pôles.
Lafigure(3.62)montrelesformesd’ondedescourantsobtenuesenalimentationsinusoïdale,enmode linéaire et enmode saturé. L’analyse spectrale des courants pour les deuxmachinesasynchrones est donnée dans la figure (3.63), elle montre qu’en absence de saturation lesharmoniques existants sont, pour laMAS à 8 pôles, l’harmonique de rang 47 et 49 et pour laMASà10pôles,cesont lesharmoniquesderang53et55quisontexistants,cesharmoniquessontceuxduesàl’interactiondeladenturerotoriqueaveclefondamentaldetemps.
On remarquequ’enprésencede la saturation, l’effet desdentures rotoriques est atténué, setraduisant par des amplitudes des rangs correspondant, moins importantes dans le spectre decourantdesmachinesasynchronesà8et10pôles.
Cet aspect de l’étude permet de mettre en évidence l’importance de la saturation dansl’introductiond’harmoniquesdecourantetparconséquentdecouple.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
140
(a)MASà8pôles (b)MASà10pôles
Figure3.62:Formed’ondeducourantdelaMASenalimsinusoïdale
(a)MASà8pôles (b)MASà10pôles
Figure3.63:SpectreharmoniquedescourantsdelaMASenalimsinusoïdaleNousrassemblonssurlafigure(3.64),lesformesd’ondesducoupleinstantanépourlesdeux
machinesconsidéréesetdanslesconditionsprisesauparagrapheprécédent.D’unpremierabord,nouscomparons lesvaleursdu tauxd’ondulationducouple,défini commeétant le rapportducouplecrêteàcrêtesurlecouplemoyen.Cetauxestde5.71%pourlamachineasynchroneà8pôles;ilvaut4.59%pourlamachineà10pôles.
Nous avonsmis en évidence, au début de ce chapitre, les harmoniques susceptibles d’êtreprésents dans le spectre du couple de lamachine asynchrone ainsi que les conditions de leurexistence.
En sachant que le glissement nominal des machines asynchrones étudiées est très faible( g <0.01) et que les harmoniques issues de laMLI sont de la forme γphN21 ± , les relations
exprimantlecontenuharmoniqueducoupledesmachinesasynchronessont:
p
NN er
ph ληγ ±±±±± 22)11( (III.46)
aveclaconditionque
022)11( =±±±±±± λη eresph NnNpkpNp (III.47)

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
141
où:
,...3,2,1,0,,,, =ληγ nk
phN estlenombredephasedelamachine.
Avec une alimentation en tensions sinusoïdale ( 0=γ ), on peut trouver une multitude decombinaisonspermettantdegénérerdesharmoniquesdanslecoupledelamachineasynchrone(équation III.46 avec la condition III.47). Pour pouvoir séparer les phénomènes, nous avonssuperposé, sur la figure (3.65), les spectres obtenus avec une alimentation sinusoïdale et ceuxobtenusavecunealimentationsMLIpourlesdeuxmachinesconsidérées.
Dans la machine asynchrone à 8 pôles (figure (65.a)), on remarque que l’introduction desharmoniquesd’alimentationMLIderang73,79,83et85(tableau(3.14))crééerespectivementdesharmoniquesdecouplesderang72,78,84(823.464Hz,892.086et960.7Hz).Parailleurs,lesharmoniquesderang6(68.622Hz),12(137.244Hz),48(548.976Hz)nesontpasaffectésparl’introduction d’harmoniques de MLI. Par contre, l’harmonique de rang 24 (274.488 Hz) estatténué,cequisignifiequel’interactiondesharmoniquesdeMLIaveclesautresharmoniquesdetempscréentunharmoniquedecouplede rang24qui compenseceluidueà laprésencede lasaturation.L’harmoniquederang48(548.9Hz)estdûprincipalementàladenturerotorique.
PourcequiconcernelaMASà10pôles(figure3.68.b),enmodesinusoïdaleetensaturé,onretrouvelesharmoniquesderang6(85.812Hz),12(171.624Hz),24(324.248Hz),48(686.496Hz), 54 (772.308Hz) et 60 (852.12Hz). L’harmonique de rang 54 est principalement dû à ladenture,alorsquelesautresharmoniquessontprincipalementdusàlaprésencedelasaturation.
L’introduction des harmoniques deMLI de rang 55, 61, 65 et 67 crée respectivement desharmoniquesdecouplederang54,60et66(934.966Hz).Parailleurs,cesharmoniquesdeMLIn’affectent pas l’amplitudes des harmoniques de rang 6, 12 et 48, par contre ils affectentl’harmoniquederang24quietamplifiel’harmoniquederang54(figure3.65.b).
De même que pour les courants, nous avons effectué des simulations en linéaire et enalimentation sinusoïdaledesmachines asynchrones à 8 et 10 pôles et ce, en pas à pas dans letemps.
La figure (3.66) montre les formes d’ondes des couples en alimentation sinusoïdale. Enabsencede la saturation (en linéaire), les formesd’ondedu couple sontmoins «bruitées» quelorsquel’ontravailleenprésencedelasaturation.Eneffet,lesharmoniquesduesàlasaturationn’existentplusetseulesubsistelesharmoniquesdusàladenturerotorique.
L’analysespectraleprésentéedans la figure (3.67),de la formed’ondedescouple;confirmequeseullesharmoniquesdusàladenturerotoriquequisontderang48pourlamachineà8pôleset54pourlamachineà10pôles.
Enl’absencedelasaturation( 0=η )etsousunealimentationsinusoïdale( 0=γ ),lesrelations(III.46)et(III.47)aboutissentàlamêmeconclusion.
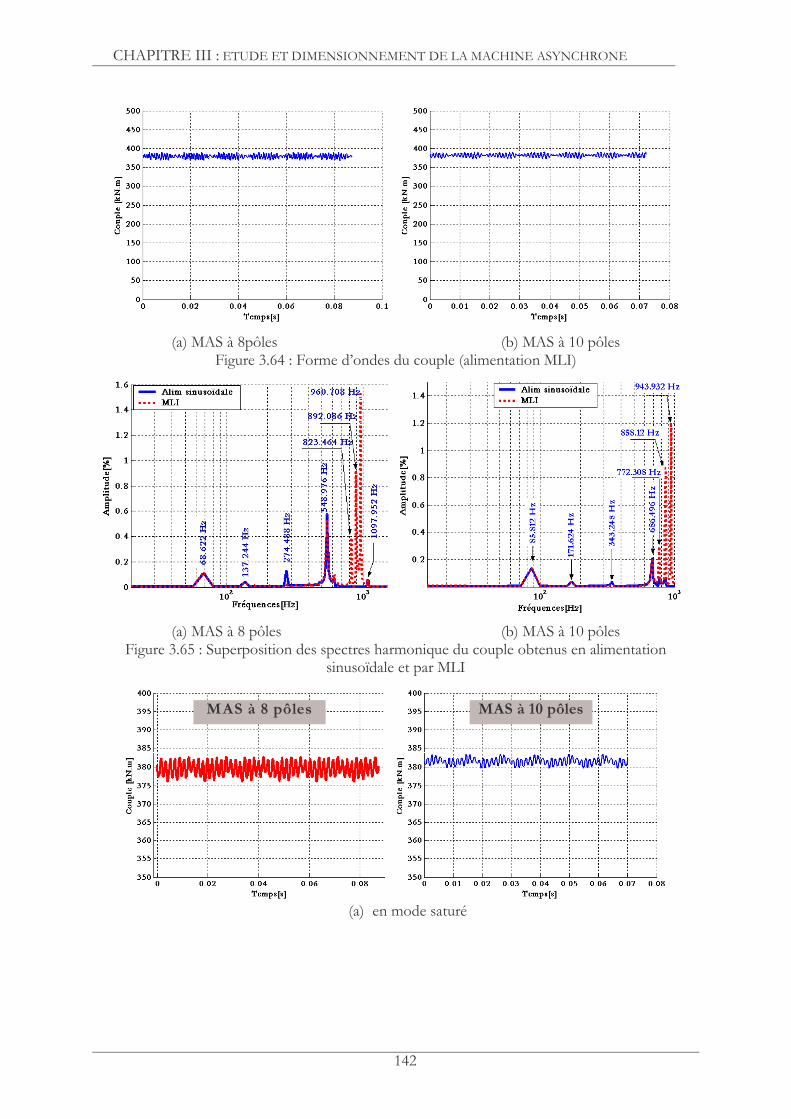
CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
142
(a)MASà8pôles (b)MASà10pôles
Figure3.64:Formed’ondesducouple(alimentationMLI)
(a)MASà8pôles (b)MASà10pôles
Figure3.65:SuperpositiondesspectresharmoniqueducoupleobtenusenalimentationsinusoïdaleetparMLI
(3B#V (3;7#V
(a) enmodesaturé

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
143
(3B#V (3;7#V
(b)enmodelinéaire
Figure3.66:Formed’ondeducoupledelamachineasynchroneenalimentationsinusoïdale
(a)MASà8pôles (b)MASà10pôles
Figure3.67:Spectreharmoniqueducoupledelamachineasynchroneenalimsinusoïdale
8*6* !####Le tableau (3.11) reprend les principales performances des deux machines asynchrones
retenues.LespertesduesauxharmoniquesdebobinageetdetempssontinclusesdanslespertesJoule représentées dans le tableau. Par ailleurs, les inductances sont celles obtenues en régimesaturé.
Entermedefacteurdepuissanceetderendement,lesmachinessontquasimentvoisines.Lecourantabsorbéestmoinsimportantdanslamachineasynchroneà8pôles(environs–3%).Lespertestotalessontmoinsimportantesdanslamachineasynchroneà8pôles(environs–3.5%).Lamachineasynchroneà8pôlessemblelaplusindiquéepourrivaliseraveclaMSAPentermedeperformances. Toutefois la température excessive (+12.5% par rapport à laMAS à 10 pôles),représenteun inconvénientnonnégligeable. Parailleurs, le tauxd’ondulationducoupleestde22%moinsfaibledanslamachineasynchroneà10pôles.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
144
Tableau3.12:PrincipalesperformancesdelaMAS (3B#V (3;7#VFréquence(Hz) 11.4 13.3Facteurdepuissance 0.89 0.881Rendement 0.96 0.958Courantabsorbé(efficace)(A) 876 901Glissement(%) 0.93 0.975Pertesfer(kW) 47 43.PertesJoulestatoriques(kW) 131 145PerteJoulerotoriques(kW) 81 84Températureducuivre(°C) 137.4 122.1
mL (H) 0.17 0.141*mL (H) 0.061 0.045
fsL (H) 0.0061 0.0065
frL′ (H) 0.004 0.0039
Coupleutile(kNm) 380 380Tauxd’ondulationducouple(%) 5.71 4.69
8*B* Cechapitremontre lesdifférentsmodèlesétablispour l’étudede lamachineasynchronede
fortepuissance,leurvalidationetleurmiseenœuvrepourledimensionnementetl’optimisationenvud’uneapplicationmarineparPOD.
Nousavonsdélibérémentcommencéparmettreenrelieflesdifférentsharmoniquesd’espaceetdetempspouvantexisterdanslamachineainsiquelesmécanismesd’interaction.Ilestévidentquelapriseencomptedetouslesharmoniques,dansunmodèlesimple,estinespérée.
Dansuneoptiquedepré*dimensionnement,nousavonsmisaupointunpremiermodèlebasésur une méthode par éléments finis couplé à un modèle circuit, avec prise en compte de lasaturation. Cemodèle ne prend pas en compte correctement des harmoniques d’espace et detemps. La simplicité de ce modèle fait, qu’on l’a privilégié pour une première phase dedimensionnement.
Un second modèle basé sur le principe de décomposition spectrale de la distribution descourantsdanslesencochesestensuitemisaupoint.Cemodèle(MHE),permetparuncouplagedumodèleélémentsfinisetdumodèlecircuitmultiharmoniqued’espace,decalculerlespertesdues aux harmoniques d’espaces mais aussi d’obtenir les principales performances en tenantcomptedelacontributiondesharmoniquesdebobinages.
Unedémarchebaséesurlecalculparélémentsfinisestparlasuiteprésentéepourlecalculdespertes dues aux harmoniques de temps, en particulier les harmoniques issus de la MLI. Cescalculspermettentobtenir l’évolutiondesparamètres rotoriques,notamment,enfonctionde lafréquence.Unmodèlecircuitestensuiteétablipourchaqueharmoniquedetemps.Connaissantlatension du rang harmonique correspondant, on déduit facilement le courant absorbé associé àchaqueharmonique.LespertesJoulerotoriquesduesauxharmoniquesdetempsdelaMLIsontensuitecalculéesparcemodèleappeléMHT.
LesmodèlesMHTetMHE sont validés en comparant les résultats obtenus à l’aide de cesdeuxmodèlesavecceuxobtenuesparuncalculévolutifpasàpasdansletempsparEF.
Nousavonsenoutre,misenévidence labonneprécisiondumodèleMHEauvoisinagedupointdefonctionnementdelamachineetlabonnepriseencomptedesharmoniquesd’espaces.

CHAPITREIII:ETUDEETDIMENSIONNEMENTDELAMACHINEASYNCHRONE
145
Le modèle MHT permet d’obtenir la forme d’onde du couple et de prédire de manièrerelativementbonne lacontributiondesharmoniquesde tempsduesauvariateur.Malgré le faitque ce modèle ne tient pas en compte la contribution des harmoniques de la structure(harmoniquesdedentures)etharmoniquesdesaturation.
Ainsi,ledéveloppementdecesdifférentsoutils,nouspermetd’aborderdanslasecondepartiedu chapitre le problème de dimensionnement et d’optimisation des machines asynchrones àfortespuissances.
Àpartirdumodèlesimplifié(monoharmonique),unecampagnedesimulationaétéeffectuéepourpouvoirmettre en évidence lesmachines asynchronespermettantd’atteindre lesobjectifsfixéssouslescontraintesdéfiniesetce,pourchaquepolarité.UnecomparaisondesperformancesentremachinesasynchronesdedifférentespolaritésapermisdedégagerdeuxstructuresoffrantlesmeilleuresperformancesetpouvantrivaliseraveclaMSAP.
Unaffinementdesperformancesdesmachinesretenues,àsavoir lamachineasynchroneà8pôles et 10 pôles est ensuite effectué à l’aide d’un modèle tenant en compte les principauxharmoniques de bobinage, ce modèle permet, en outre, de calculer les pertes issues desharmoniquesdebobinage.
Parailleurs,àl’aidedumodèlemultiharmoniquesdetemps,lespertesduesauxharmoniquesdetempsissusdelaMLIsontévaluéespourlesdeuxmachines.
Bienquelesmodèlesdéveloppéspermettentuncalculrapidedespertesduesauxharmoniquesde bobinage et de temps, il est toutefois utile de souligner certaines de leurs faiblesses de cesmodèles. En effet, les modèles MHE et MHT tiennent compte de la saturation de manièreglobale lors de l’évaluation des performances secondaires (pertes notamment) issues desharmoniques.Certainespertesnepeuventpasêtreprisesencomptevianosmodèlesàsavoir:
• Lespertessuperficiellesduesauxharmoniquesdefuitesdezig*zag.• Lespertesparpulsationduesàladenture.• Lespertesduesauxharmoniquesdetempsissusdelaréactiond’induitetdelasaturation.• Lespertessupplémentaires.
Danscettelogique,uneanalysecomplémentaireesteffectuéesurlespertesetlecoupleobtenuparélémentsfinisetenpasàpasdansletemps.
Ainsi,lespertesJoulerotoriquestotalesobtenuesparélémentsfinisenpasàpasdansletempsnesontsupérieuresquede13%parrapportàcellesobtenuesvialesmodèles,demêmequelesondulationsducouplesobtenuesparlemêmeoutilsnesontsupérieuresquede15%comparéesàcellesobtenuesparlemodèleMHT.
En ce qui concerne les ondulations du couple, une analyse fine est faite sur les différentsharmoniquesdetempscontribuantauxondulationsducouple.C’estainsiqu’atraversunesériedesimulation,onamisenévidencelacontributiondesharmoniquesdetempsdusauxvariateurs,à la structure et à la saturation. Ce travail nous a permis de comprendre les différentesinteractionsetconfortél’analysequalitativeeffectuéedanslapremièrepartiedecechapitre.

''//22
##

CHAPITREIV:COMPARAISONDESPERFORMANCES
152
?* '/2 (($ (
?*;*
DanscechapitrequiabordelacomparaisondesperformancesentrelaMASetlaMSAP,nousreprendronslesprincipauxrésultatsobtenuspourlamachineàaimantspermanentsetceuxdesmachinesasynchronessélectionnées(8pôleset10pôles).Lesmachinessontcomparéesentermededimensionsetdeperformancesetunediscussionterminecechapitre
?*<* D!!##
Nous avons résumé dans le tableau (4.1) les principales performances de la machine àaimantspermanentsetcellesdesdeuxmachinesasynchronesretenuesauchapitreprécédent.Cetableaucontientaussilesdifférentsparamètresgéométriquesdestroismachines.
Lors du dimensionnement desmachines asynchrones, la couronne externedans lequel setrouvelescanauxd’aérationn’estpaspriseencompte;pourlesdimensionshorstout,ilfaudraajouterenviron70mmaudiamètreexternedechaquemachine(Figure(4.1)).
Tableau4.1:Récapitulatifdesprincipalesperformancesetdesparamètresgéométriques
MSAP MAS1 MAS2
Couple (kNm) 380 380 380
Vitesse(tr/mn) 170 170 170
Courant (A) 806 876 901
Densité de courant (A/mm²) 4 <5 <5
Température du cuivre (°C) 95 137.4 122
Rendement 0.979 0.96 0.958
Facteur de puissance 0.95 0.89 0.889
Nombre de pôles 16 8 10
Taux d’ondulation du couple (%) 3.5 5.71 4.59
Couple volumique (kN.m/m3) 56.63 48.28 48.53
Nombre d’encoches Stator/Rotor 120/- 96/100 120/135
Diamètre d’alésage (mm) 1400 1330 1400
Longueur utile (fer +event) 2500 2500 2500
Diametre externe (mm) 1750 1870 1870
Entrefer (mm) 6 4 4
Encombrement (m3) 6.71 7.87 7.83
Canaux d’aeration axiaux au voisinage des encoches statoriques non oui Oui
Canaux d’aération axiaux à la périphérie externe du moteur oui oui Oui
Event d’aération radiale au milieu du moteur oui oui Oui
Nousvoyonsd’oresetdéjàque lesdeuxmachinesasynchronesretenuessont légèrementplusvolumineusesquelamachinesynchroneàaimantspermanents;à longueurutile identique,leur diamètres extérieurs sont environs 7% plus grand que celui de la machine à aimants.L’encombrent totaldoit tenir comptede la longueurdes têtesdebobinesquidépendentde la

CHAPITREIV:COMPARAISONDESPERFORMANCES
153
polarité.Eneffet,l’encombrementdesmachinesasynchroneest,decefait,17%plusgrandqueceluidelamachineàaimants.
Dansl’applicationquenousavonsétudiée, lesmachinesélectriquessontinséréesdansun«bulbe» duquel sort l’axe du rotor directement lié à l’hélice (Figure (4.2.a)). Des étudesd’hydrodynamiques montrent que le rapport du diamètre du bulbe à celui de l’hélice est unparamètre important pour le rendement hydrodynamique du système. La figure (4.2.b) , déjàprésenteauchapitreI,montrelefacteurdecorrectionàapporteràlapuissanceutilepourtenircomptedesperteshydrodynamiques.L’optimumse trouvantpourun ratiode l’ordrede0.35,l’augmentationdudiamètreextérieurde lamachineaugmenteproportionnellement lediamètredubulbe ramenant ainsi ce ratio àdes valeursprochesde0.374.L’examende la figure (4.2.b)montrequelerendementhydrodynamiquen’estpasbeaucoupaffectéparcetteaugmentationetlapertederendementestdel’ordrede1%danslepiredescas.
5)!#!#!
5)!)
Figure4.1:Canauxd’aérationauniveaudelaMAS
Dia
mèt
re d
’hél
ice
(a)Illustrationdubulbe/hélice (b)Facteurcorrectif
Figure4.2:Facteurcorrectifdurendementhydrodynamiqueenfonctiondurapportdesdiamètresdubulbeetdel’hélice
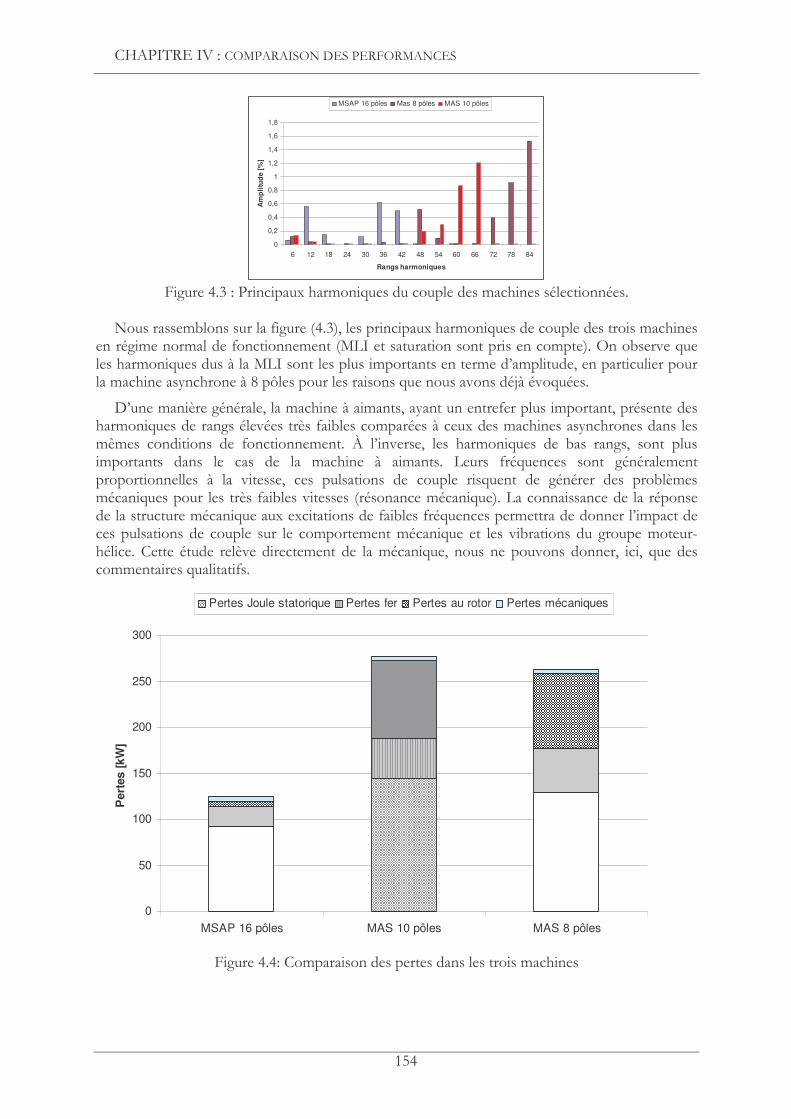
CHAPITREIV:COMPARAISONDESPERFORMANCES
154
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
6 12 18 24 30 36 42 48 54 60 66 72 78 84
Rangs harmoniquesA
mp
litu
de [
%]
MSAP 16 pôles Mas 8 pôles MAS 10 pôles
Figure4.3:Principauxharmoniquesducoupledesmachinessélectionnées.
Nousrassemblonssurlafigure(4.3),lesprincipauxharmoniquesdecoupledestroismachines
enrégimenormaldefonctionnement(MLIetsaturationsontprisencompte).OnobservequelesharmoniquesdusàlaMLIsontlesplusimportantsentermed’amplitude,enparticulierpourlamachineasynchroneà8pôlespourlesraisonsquenousavonsdéjàévoquées.
D’unemanièregénérale,lamachineàaimants,ayantunentreferplusimportant,présentedesharmoniquesderangsélevéestrèsfaiblescomparéesàceuxdesmachinesasynchronesdanslesmêmes conditions de fonctionnement. À l’inverse, les harmoniques de bas rangs, sont plusimportants dans le cas de la machine à aimants. Leurs fréquences sont généralementproportionnelles à la vitesse, ces pulsations de couple risquent de générer des problèmesmécaniquespour lestrèsfaiblesvitesses(résonancemécanique).Laconnaissancedelaréponsedelastructuremécaniqueauxexcitationsdefaiblesfréquencespermettradedonnerl’impactdeces pulsations de couple sur le comportementmécanique et les vibrations du groupemoteur*hélice.Cette étude relève directement de lamécanique, nous ne pouvons donner, ici, que descommentairesqualitatifs.
0
50
100
150
200
250
300
MSAP 16 pôles MAS 10 pôles MAS 8 pôles
Pert
es [
kW
]
Pertes Joule statorique Pertes fer Pertes au rotor Pertes mécaniques
Figure4.4:Comparaisondespertesdanslestroismachines

CHAPITREIV:COMPARAISONDESPERFORMANCES
155
Enobservant la figure (4.4), lespertesdans lamachinesà aimants sontplus faiblesque lespertesdanslesmachinesasynchrones,ellessontpratiquementmoitiémoinsimportantes(*120%parrapportàlaMASà10pôleset–110%parrapportàlaMASà8pôles).LadifférencerésidedanslespertesJoulerotoriquesetlatempératureducuivrestatoriquequiamplifielespertesJoulestatoriques,pointsdursdesmachinesasynchrones. Il est intéressantde rappelerque lespertesJoulestatoriquesduesauxharmoniquesdetempsduvariateurn’excèdentpas1kWdanslestroismachines(MSAP,MAS)
?*8* !Plusieursconsidérationsentreenjeudanslechoixd’unmoteurdanslapropulsionparPOD
pour les navires de croisière en particulier. Au côté des exigences de performances, desconsidérationséconomiquespeuventprédéterminerlechoixd’unmoteur.
Le tableau (4.2) résume les principaux critères technico*économiques qui prévalent dans lechoixd’unestructurepourl’applicationquinousconcerne.Nousavonsregroupétroisstructuresdemoteur,lamachinesynchroneàrotorbobiné(MSRB)quiactuellementestcellequiéquipelamajeurpartiedesPOD, lamachinesynchroneà fluxradialeetaimantspermanentsmontésensurface(MSAP)etlamachineasynchrone(MAS)àcage.
Le coûtd’acquisitiondesmoteurs asynchronesmais aussi leur excellente fiabilité associéeàunefacilitédemaintenance,sontlesprincipauxaspectsquimilitentenfaveurdecettestructure.OndevinequesilamachineasynchroneoffrelesperformancessuffisantesàuneapplicationparPODpourlesnaviresdecroisière,lesautrescritèrescitéspeuventaisémentorienterlechoixversdetellesstructures.
%?*<2#!
(+ ( (
WW WWW WW
G),)- WW W WWW
G)5# WW WWW WW
$%! W WW WWW
WW W WWW
G9! WWW WW WW
+:moyen;++:bon;+++:excellent
?*?* Dans ce chapitre, nous avons traité la comparaison des performances entre la machine à
aimants à 16 pôles et les machines asynchrones à 8 et 10 pôles retenues à l’issue de«l’optimisation»menéeauxchapitresIIetIII.L’occasiondevoir(ouderevoir)certainsaspects.
Ainsi, au regard des résultats regroupés ci*dessus, nous ne faisons que confirmer que lamachineàaimantspermanentsestplusperformantequelamachineasynchroned’unpointdevuducouplemassique,del’encombrement,despulsationsdecoupleetdespertes.Cependant,noussoulignonsquel’écartrelatifaveclamachineasynchroneoptimiséeestténu.
Eneffet,lesperformancesdelamachineàaimantspermanentsentermedetauxd’ondulationtotaldecoupleetdepertes restentmeilleureset sembleêtre l’apanagedesmachinesàaimants

CHAPITREIV:COMPARAISONDESPERFORMANCES
156
permanents. Toutefois, les ondulations du couple des machines asynchrones retenues sontrelativementréduitesmoyennantunchoixjudicieuxdesparamètresdelamachine(combinaisonsencochesstatoriquesetrotoriques).Ilestintéressantdesoulignerquelesharmoniquesdecoupleles plus prépondérants de la machine asynchrone sont ceux de hautes fréquences dus àl’alimentationparconvertisseurcontrairementàceuxdelamachineàaimantspermanentsdontles plus prépondérants sont dus aux harmoniques de bas rangs de la FÉM et du couple dedétenteaucôtédeceuxdueàlaMLI.
Le courant absorbé dans les machines asynchrones retenues bien que plus important parrapport à celui de la machine à aimants permanents reste relativement acceptable et permetd’éviterunsurdimensionnementdesonduleursassociés.
Bien que l’encombrement soit relativement plus important (+15%) dans les machinesasynchronesretenues,ilestcependantimportantdesoulignerquelaproportiond’augmentationdudiamètreexterneresterelativementacceptable(+7%uniquement)etpermetdemaintenirunrendementhydrodynamiquevoisindeceluidelamachineàaimantspermanents.
Un point tout aussi important, est les risques de court*circuit entretenus dans lesmachines àaimantstantquelamachineestentraînée.Cepointestconsidérécommel’undesinconvénientsdelamachineàaimantspermanents.
Les résultats obtenus mettent en relief le fait que les machines asynchrones pour desapplicationsdefortespuissancesetdefaiblesvitessespeuventremplacerlesmachinesàaimantspermanentsàfluxradial(topologieclassique)dansdesapplications«ciblées».

&&!!!!

CONCLUSIONGÉNÉRALE
157
1(&L’étude diligentée par les sociétés Converteam Motors (ex Alstom Power Conversion) et
Converteam Belfort (Ex Alstom Power Conversion) et menée principalement au laboratoireGroupe de Recherche en Electronique et en Electrotechnique de Nancy, a pour motivationpremière, la mise en œuvre d’une méthodologie «réfléchie» de dimensionnement, demodélisation etd’optimisationdesmachines électriques.Pour ce faire, les acquis théoriques etméthodologiquesdulaboratoire,adossésausavoirfairedesindustriels,ontétémisencommunpourl’aboutissementdeceprojet.
LechoixdesmachinesàaimantspermanentsmontésensurfaceetdesmachinesasynchronesàcagepourlapropulsionparPOD,résidedanslafortemaîtrisedecestechnologiesetdeleurscoûtspar les industriels.L’améliorationdesperformancesdecesstructurespasse,aupréalable,parunecompréhensiondesphénomènessurgissantenleursein.Ainsi,pourabordernotreétude,nous avons identifié les différents phénomènes indésirables possibles et leurs impacts sur lecomportementde lamachine.Naturellement, l’analyseducahierdeschargesnousapermisdedégager les caractéristiques déterminantes, d’isoler les contraintes de dimensionnement et deréduire,ainsi,lenombredeparamètresgéométriquesdedimensionnement.
Lapriseencomptedecertainsdecesphénomènes,danslecalculdesmachinessynchronesàaimants et asynchrones a nécessité la mise en œuvre de modèles tenant en compte desharmoniquesd’espaceetdetemps.Pourcefaire,uncouplageentrelesmodèles«fréquentiels»decalculdechampsetlesmodèlesdetypecircuitestprivilégié;cequiapouravantaged’avoiruneprécisionsuffisante,toutenréduisantlestempsdecalculquisont,danslecasd’uneméthodetemporelledecalculdechamp(pasàpasdansletemps)trèsimportants.Parmicesmodèlessemianalytiques,ceuxpermettantdeprédirelesharmoniquesdecourants,lespertessupplémentairesassociées et les pulsations du couple issues des convertisseurs donnent de bons résultats quenousavonsvalidésavecuncalculdechampmagnétodynamiqueévolutif.Bienquecesmodèlesne tiennent pas compte de certains aspects telles que les harmoniques de temps issues de lastructureetde la saturation,nousavons toutefoismontréquedans l’hypothèsed’unemachinebiendimensionnée,lesprincipauxharmoniquesdetempsimposantdefortpulsationsdecouplesont ceux dues au convertisseur notamment dans le cas de lamachine asynchrone. S’il existequelquesécartsentrelesméthodesdéveloppéeset le logicieldecalculévolutif, iln’enrestepasmoinsquenousavonssensiblementaméliorélespossibilitésdeprédictiondesperformancesdesmachinesétudiéespourl’applicationconsidérée.
Surleplanméthodologie,l’approcheanalytiqueetsemianalytiqueontétépréconiséespourlacompréhensiondecertainsphénomènesetlaprédictiondesperformancesdemanièrerapideetsuffisamment précise. L’utilisation d’outils de résolution électromagnétique des équations dechamps par éléments finis, en tenant compte du mouvement, est nécessaire pour valider lesmodèlessemianalytiquesmaisaussipourprédiredemanièrepluspréciselesperformancesdelamachine,entenantcomptedesdifférentsaspectsfaisantdéfautsauxméthodesanalytiqueetsemianalytique.
Pourcequiconcernelamachineàaimantspermanents,certainsaspectsindésirablesontétéabordés tels que les ondulations du couple, le couple de détente et le phénomène dedémagnétisation des aimants. Pour tout ces aspects, une démarche,mise enœuvre en amont,nous a permis d’aboutir à une structure de machine à aimants permanents, offrant desperformances conformément au cahier des charges définis. Une prospection des différentestechniques structurelles de réduction des ondulations du couple, a permis de dégager dessolutions réalistes, facile àmettre enœuvre et àmoindre coût.La combinaisondu rapportdunombre d’encoches statoriques au nombre de pôles a permis de repousser les pulsations ducouple de détente. De même, l’introduction de cales magnétiques a permis de réduiresignificativement l’amplitude du couple de détente. Par ailleurs, la combinaison d’un type de

CONCLUSIONGÉNÉRALE
158
bobinage adéquat et d’un épanouissement des aimants approprié, s’est traduite par une quasiannulation des harmoniques de bas rangs (5 et 7) de la FÉM. L’effet de la segmentation desaimants sur les performances a été étudié et elle s’avère un paramètre tout aussi primordial,puisqu’unchoixjudicieuxdunombredesegmentsparpôlespermetd’atténuerlesharmoniquesde rangs supérieurs (11 et 13) de laFÉM.Le vrillage discret des aimants est aussi abordé (enannexe)commesolutionenvisageable.Lacombinaisondecessolutionsstructurelles,apermisderéduire considérablement les ondulations du couple, sans pour autant, affecter de manièresignificative lefondamentalde laFÉMetdonc lavaleurmoyenneducouple.Bienque l’aspectthermique ne soit pas abordé, le dimensionnement des aimants est effectué sur la base d’unfonctionnementàlalimitedelatempératureadmissiblemaisaussienconsidérantlesconditionsde fonctionnement en court*circuit triphasé en régime établi. À l’issu des différentsdimensionnements, nous avons dégagé un moteur à 120 encoches et 16 pôles. Les résultatsexpérimentaux du prototype existant de 6.75MW, 170 tr/mn, confortent ceux obtenus parsimulation.
De même, nous avons adopté une approche «voisine» pour le dimensionnement de lamachineasynchrone,avectoutefois,certainesspécificités.Eneffet,certainspointsducahierdescharges ont été «ajustés», tels que la température et la densité de courant admissibles,moinscontraignantes, avec l’option d’insérer des canaux d’aération aux sommets des encoches. Laconnaissancedesphénomènesexistantsdanslamachineasynchrone,offrelapossibilitédemieuxapporterdessolutionsstructurellesàcertainseffetsindésirables.Ainsi, lescouplesparasites, lespertes dues aux harmoniques d’espace,mais aussi les forces radiales, sont des points durs quisonttraitésàlabase.Surceplan,uneprospectiondessolutionsmaisaussi,unerétrospectiondesacquisexpérimentaux,apermisde fournirdesélémentsd’appréciationetderéponse.Lechoixadéquatdesnombresd’encochesstatoriquesetrotoriquesassociéàlapolaritépermetd’atténuerles phénomènes indésirables cités plus haut. En effet, le choix d’un bobinage permettant deréduirecertainsharmoniquesdebobinagede rangfaible, se traduitpar la réductiondespertesJoule rotoriques dues à ces harmoniques d’espace, de réduire les couples parasitesmais aussid’éludercertainsmodesvibratoires(forcesradiales).
La fiabilité et la robustesse des machines asynchrones ont été durant longtemps étudiées,établiesetéprouvées,d’autrepart,laréputationdelamachineàaimantspermanentsd’avoiruneforte couple volumique et un minimum d’ondulation de couple s’est imposée de manièreévidente.Dans cetteétude, le challenge fûtde comparerdeuxmachines à flux radial, àmêmenombre de phases, dans un encombrement quasi*similaire. Indubitablement, la machine àaimantspermanentsestindétrônablesurcertainsaspects,telsquelespertes.Cependant,ledéfid’approcher les performances de la machine asynchrone à celles de la machine à aimantspermanentsétudiéeestatteintsanssacrifierlacontrainted’encombrement,pointcrucialdanslapropulsionparPOD.
Alasuitedecetravail,onpeutenvisagerdesétudespluspousséespourprendreencomptelesaméliorationsrécentesdessystèmesderefroidissementetintégrerlemoded’alimentationetlacommandedès laphasedeconceptionde lamachine.Eneffet, lesperteset leséchauffementssont des points durs de la machine asynchrone et le mode de refroidissement adopté estgénéralementàairetàeaudemervialesparoisexterne,danslapropulsionparPOD.Àceteffet,pouraméliorerlesmoyensd’évacuationetderefroidissement,l’introductionjudicieusedecanaux(plus exactement d’évents radiaux à «pins») d’aération dans les culasses, est actuellementenvisagéepourcetypedepropulsion.Parallèlement,lesconvertisseursetlemodedecommandefontpartie intégrantedes systèmes à variationdevitesse.Onpeut explorer lesmoyens, certesdéjà avancés avec l’apparition d’onduleurs multi*niveaux et les méthodes avancées decommandes des onduleurs, de délivrer une tension quasi sinusoïdale et donc de repousser lesharmoniques du couple. D’un point de vue commande, il serait intéressant d’exploiter desstratégiesdecompensationdesondulationsducouple.

!!!!++%%DD##

RÉFÉRENCESBIBLIOGRAPHIQUES
160
$(++&'01(
==;;>> G.Filliau,A.Bondu,L.Mazodier,«LeNavireToutÉlectrique*PropulsionetProductiond’Énergie»,Techniquedel’ingénieurD5610.
==<<>> G. Filliau, A. Bondu, L. Mazodier, «Le Navire Tout Électrique* État de l’Art des
Composants»,Techniquedel’ingénieurD5615.==88>> G.Filliau,A.Bondu,L.Mazodier,«LeNavireToutÉlectrique*ÉvolutionsetSystèmes
deConduites»,Techniquedel’ingénieurD5620.==??>> «La Propulsion par POD», Guide Technique pour les Souscripteurs, Munich Group,
http://www.munichre.com/publications==@@>> «FocusonPropulsionPOD»,Rapport2004,SINM,
http://www.sinm.it/downloads/ENG_POD.pdf==AA>> F. Mewis, « The Efficiency of Pod Propulsion », 22nd International Conference
HADMAR2001,1*4Octobre2001,Bulgarie,10pages==66>> «Azipod,Mermaids,DolphinsandOtherMarineCreatures»,OffshoreSupportJournal,
Novembre1998,pp25*28.==BB>> D. Gondouin, F. Menneron, « Le Navire Tout Électrique *Nouvelles Topologies de
SystèmesdePropulsionÉlectriquesdeNavires»,REEN°9/2000,pp48*52.==CC>> R.Michaux,P.Letellier, «LesMachinesDiscoïdesàChampAxial dans lesSystèmesde
PropulsionÉlectriques»,REEN°3/1997,pp37*42.==;;77>> P.Lettelier,“ElectricalPropulsionMotors”,ElectricPropulsion;TheEffectiveSolution,
IMarestConferenceProceedings,5*6October1995.pp.7.1*7.8.==;;;;>> A. Arkkio, N. Bianchi, S. Bolognani, T. Jokinen, F. Luise, M. Rosu, «Design of
SynchronousPMMotorforSubmersedMarinePropulsionSystems»,15thInternationalConferenceonElectricalMachines,Brugge,Belgium,25–28August2002.Paper523,6pages
==;;<<>> Rosu,M.,Arkkio,A., Jokinen,T.,Nahkuri,V.,Mantere, J.,Westerlund, J, «Permanent
MagnetSynchronousMotorforShipPropulsionDrive»,ICEM'98,Istanbul,Turkey,2*4Septembre1998,pp.702*705.
==;;88>> A.A. Smith, S. Williamson, A.G. Hodge, « High Torque Dense Naval Propulsion
Motors»,ElectricMachinesandDrivesConference,2003.IEMDC2003,Volume3,1*4Juin2003,pp:1421–1427.
==;;??>> A.J.Mitcham,J.J.Cullen,«MotorsandDrivesforSurfaceShipPropulsion*Comparison
ofTechnologies»,Electricpropulsion theeffectivesolution,5*6Octobre1995,pp4.1*4.10

RÉFÉRENCESBIBLIOGRAPHIQUES
161
==;;@@>> A. Ch. Rufer, « Développement, Performances et Perspectives des Composants del’Électronique de Puissance», Journée d'information ETG : Energie TechnischeGesellschaft,Bienne(CH),CollectionETG//Volume63;24mars1999(1999).
==;;AA>> L.Mazodier,«LaPropulsionÉlectriquedesNavires»,REENo3/1997,pp30*36.==;;66>> P. Lettelier, Jeumont industrie,«Les Machines à Aimants Permanents de Grande
PuissancedanslesSystèmesdePropulsionÉlectrique».REE,No.9,oct2000,pp53*61.==;;BB>> J. Cros, P. Viarouge, « Synthesis of high performance PM motors with concentrated
windings»,IEEETransactionsonEnergyConversion,Volume17,Issue2,Juin2002pp248–253
==;;CC>> F.Libert, J.Soulard, « InvestigationonPole*SlotCombinationsforPermamentMagnet
MachineswithConcentratedWindings»,ProceedingsoftheInternationalConferenceonElectrical Machines, ICEM 2004. September 2004, Cracow, Poland.http://eme.ekA.kth.se/publications
==<<77>> A.Noël,N.Takorabet,F.Meïbody*Tabar,«ANovelApproachtoReduceShortCircuit
Current of PM Machines», ICEM04 16th International Conference on, ElectricalMachines,5*8septembre2004,Poland,6pages
==<<;;>> F.Magnussen,H.Lendenmann, «ParasiticEffects inPMMachineswithConcentrated
Windings»,IAS200540thAnnualMeetingHongKong2005,Volume2,pp1045*1049==<<<<>> P.Salminenen,«FractionalSlotPermanentMagnetSynchronousMotorsforLowSpeed
Applications», These de doctorat, Lappeenranta University of Technology.http://www.ee.lut.fi/en/research/Pia_Salminen.pdf
==<<88>> M. Olszewski, « Fractional*Slot Surface Mounted PM Motors with Concentrated
Windings for HEV Traction Drives », Oak Ridge National Laboratory, reportONRL/TM*2005,pp1*30.
==<<??>> A. Parvianen, J. Pyhönen, M. Niemelä, « Axial Flux Interior Permanent Magnet
SynchronousMotorwith Sinusoïdal ShapedMagnets », ISEF 2001, Cracovie, Pologneseptembre20*22,6pages.
==<<@@>> M. Aydin, S. Huang, T. A. Lipo, « Axial Flux Permanent Magnet Disc Machines: A
Review», Symposium on Power Electronics", Symposium on Power Electronics,ElectricalDrives,Automation,andMotion (SPEEDAM)2004,Capri, Italy, June16*18,2004,10pages.
==<<AA>> A.J. Mitcham, « Transverse Flux Motors for Electric Propulsion of Ships», IEE
ColloquiumonNewTopologiesforPermanentMagnetMachines(DigestN°1997/090),Date:18Jun1997,London,UK,pp3/1*3/6.
==<<66>> S.M.Husband,A.G.Hodge,«TheRolls*RoyceTransverseFluxMotorDevelopment»,
Electric Machines and Drives Conference, 2003. IEMDC'03. IEEE InternationalOPublicationDate:1*4June2003,Volume:3,pp1435*1440vol.3

RÉFÉRENCESBIBLIOGRAPHIQUES
162
==<<BB>> A.P.Maddison,A.Mecrow,A.G. Jack, «ClawPoleGeometries forHighPerformanceTransverseFluxMachines»,IEMDC'97,pp340*345.
==<<CC>> P. Anpalahan, J. Soulard, H. P. Nee, «Design steps towards a high power factor
transversefluxmachine»,EPE’2001,Graz,pp1*6.==8877>> A. Lewis, «The Advanced Induction Motor», Power Engineering Society Summer
Meeting,2002IEEE,Vol.1,21*25July2002,pp.250–253.==88;;>> R. Lateb, N. Takorabet, F. Meïbody*Tabar,, A. Mirzaïan, J. Enon, A. Sarribouette,
«PerformancesComparisonof InductionMotors and SurfaceMountedPMmotor forPODMarinePropulsion»,41thIASAnnualMeeting.
==88<<>> A.G.Hodge,D. J.MattickObe, «TheElectricWarship », PowerEngineering Journal,février,1998,pp5*13.
==8888>> J.A.Bavay,J.Verdun,«AlliagesFer*Silicium»,Techniquedel’ingénieur,D2110,pp1*41==88??>> G.Couderchon, «AlliagesFer*Nickel etFer*Cobalt»,Techniquede l’ingénieur,D2130,
pp1*24.==88@@>> S.Bernet,R.Teichmann,A.Zuckerberger,P.K.Steimer,«ComparisonofHigh*Power
IGBT’s and Hard*Driven GTO’s for High* Power Inverters», IEEE Transactions onIndustryApplications,Vol.35,N°2,Mars/Avril1999,pp487*496.
==88AA>> S.Bernet,«RecentDevelopmentsofHighPowerConvertersforIndustryandTraction
Applications»,IEEETransactionsonPowerElectronics,Vol15,N°4,Novembre2000,pp1102*1117
==8866>> T.Meynard,M.Nahrstaedt,R.Jakob,«Evolutiondesstructuresdeconversion»,==88BB>> A. Nabae, « A Neutral – Point Clamped PWM Inverter», IEEE Transactions on
IndustryApplications,Vol.IA*17,N°5,Septembre/Octobre1981,pp518*523.==88CC>> B. Gollentz, J.L. Pouliquen, H.Baerd, «Intérêt industriel des convertisseurs
multiniveaux»,EPF’98,Belfort.
==??77>> M. Marchesoni, «High*Performance Current Control Techniques for Applications to
MultilevelHigh*PowerVoltageSourceInverters»,IEEETrans.onPowerElectronics,7(1),1992,189–204.
==??;;>> P.Hammond,«ANewApproachtoEnhancePowerQualityforMediumVoltageAC
Drives»,IEEETr.onInd.Appl.Vol.33no.1,pp.202*208,1997.==??<<>> J. S. Manguelle, M. Veenstra, S. Mariethoz, A. Rufer, « Convertisseurs Multiniveaux
AsymétriquespourdesApplicationsdeMoyenneetFortePuissance»,EPF2000,pp295*300.
==??88>> A. Rufer, « Les Onduleurs Multiniveaux: Evolution de la Recherche et Applications
futures»,BulletinSEV/VSEMars2006,pp25*30.

RÉFÉRENCESBIBLIOGRAPHIQUES
163
==????>> Flux2D,FiniteElementMethod,Cedrat,France==??@@>> J. Chatelain, «Machines Electriques», Traité d’électricité Vol X, Edition Presses
PolytechniquesRomandes1989.==??AA>> M. Jufer, J. C. Sabonnadière, «Conception Assisté par Ordinateur (CAO), Moteur
Asynchrone»,Techniquedel’Ingénieur,D3590,pp1*16.==??66>> S*M.Hwang,J*B.Eom,Y*H,Jung,D*W.Lee,B*S.Kang, « VariousDesignTechniques
to Reduce Cogging Torque by Controlling Energy Variation in Permanent MagnetMotors », IEEETrans.Mag.,Vol.37,N°.4,pp2806*2809,July2001.
==??BB>> S*M. Hwang, J*B. Eon, G*B Hwang, W*B Jeong, Y*H Jung, «Cogging Torque and
Acoustic Noise Reduction in Permanent magnet Motors by Teeth Pairing», IEEETransactionsonMagnetics,Vol.36,N°5,September2000,pp3144*3146.
==??CC>> Z.Q. Zhu, D. Howe, «Analytical Prediction of the Cogging Torque in Radial*Field
PermanentMagnetBrushlessMotors», IEEETransactionsonMagnetics,Vol28,N°2,Mars1992,pp1371*1374.
==@@77>> R.Lateb,N.Takorabet,F.Meibody*Tabar,J.Enon,A.Sarribouette,«DesignTechnique
for Reducing the Cogging Torque in Large Surface Mounted Magnet Motors»,ProceedingsoftheICEM'04,Poland.CDROM,paperN°374.
==@@;;>> R. Lateb, N. Takorabet, «Méthodes de Réduction du Couple Pulsatoire dans les
MachinesSynchronesàAimantsPermanents»,MEM’05Workshop,ENPALGER,13*14Avril2005.
==@@<<>> R. Lateb, N. Takorabet, «Méthodes de Réduction du Couple Pulsatoire dans les
MachinesSynchronesàAimantsPermanents»,AlgerianJournalofTechnology2005,pp27*32.
==@@88>> R. Lateb, F.Meibody, N. Takorabet, «Effect of Magnets Segmentation on Cogging
TorqueinSurfaceMountedPMMotors»,JournalIEEETrans.Mag,Mars2006
==@@??>> P.Vas,J.E.BrownandK.E.Hallenius,« Cross*SaturationEffectsinSaturatedSmooth
Air*GapMachines », IEEETrans. EnergyConversion, Vol. EC*1, pp 103*109,March1986.
==@@@@>> J. A. Melkebeek, J. L. Willems, «Reciprocity Relations for the Mutual Inductance
BetweenOrthogonalAxisWindings inSaturatedSalient*PoleMachines », IEEETrans.Ind.Appl,Vol.26,NO.1,pp107*113,Jan/Febr1990.
==@@AA>> A. Kheloui, «Contribution à la Modélisation et à la Commande d’Ensembles
ConvertisseursStatiques*MachinesSynchronesdeFortePuissance»,ThèsedeDoctoratdel’INPL,Décembre1994.
==@@66>> B. Stumberger, G. Stumberger, D. Dolinar, A. Hamler, M. Trlep, « Evaluation of
SaturationandCross*MagnetizationEffects inInteriorPermanentMagnetSynchronousMotor»,IEEETrans.Ind.Appl.,Vol39,NO5,Sept/Oct2003,pp1264*1271.

RÉFÉRENCESBIBLIOGRAPHIQUES
164
==@@BB>> R. Lateb, N. Takorabet, F. Meibody*Tabar, J. Enon, A. Sarribouette, A.Mirzaïan , «Effect of the Presence of Magnetic Wedges on Saturated Self and Cross CouplingInductancesofPermanentMagnetSynchronousMotor»,XVIIInternationalConferenceofElectricalMachines,ICEM’06,Crète,IDN°580,CD*ROM.
==@@CC>> J. Lesenne, F. Notelet, G. Seguier, «Introduction à l’Electrotechnique Approfondie»,
EditionTechniqueetDocumentation1986==AA77>> B.Adkins,«TheGeneralTheoryofElectricalMachines»,EditionChapmannandHall,
1957.==AA;;>> A.K.Bose,«PowerElectronicsandVariableFrequencyDrives»,IEEPress,1996==AA<<>> G. Seguier, F. Notelet, « Electrotechnique Industrielle», Edition Technique et
Documentation1977.==AA88>> P. L. Alger, «Induction Machine*their Behavior and Uses”, Gordon and Breach
Publishers,secondedition1995.==AA??>> F.Liang,D.W.Novotny,R.W.Fei,X.Xu,«SelectionofthePoleNumberofInduction
Machines forVariable SpeedApplications”. IEEETrans. on Ind.Appl.,Vol. 31,N°2,March/April1995,pp.304*310.
==AA@@>> A.Heller andV.Hamata, «HarmonicFieldEffects in InductionMachines», Elsevier
ScientificPublishingCompany,1977.==AAAA>> S. Williamson, S. Smith, « Pulsating Torque and Losses in Multiphase Induction
Machines»,IEEETrans.onInd.Appl.,Vol.39,N,Juillet/Aout2003,pp986*993°==AA66>> H.R.FudehandC.M.Ong,“ModelingandAnalysisofInductionMachinesContaining
SpaceHarmonics,PartI:ModelingandTransformation,”EEETrans.PowerApp.Syst.,vol.PAS*102,pp.2608–2615,Aug.1983.
==AABB>> H.Henao,C.Martis,G.A.Capolino,«AnEquivalentInternalCircuitoftheInduction
MachineforAdvancedSpectralAnalysis»,IEEETransactionsonIndustryApplications,Vol.40,N°3,Mai/Juin2004,pp726*734
==AACC>> Nandi,S.,Ahmed,S.,Toliyat,H.A.,Bharadwaj,R.MO«SelectionCriteriaofInduction
Machines for Speed*Sensorless Drive Applications», IEEE Transactions on IndustryApplications, Volume39,Issue3,May*June2003Page(s):704*712
==6677>> R.L.Stoll,«TheAnalysisofEddyCurrents»,EditionClarendonPress1974.==66;;>> DO’Kelly,«FluxPenetrationinaFerromagneticMaterialIncludingHysteresisandEddy
CurrentEffects»,JournalofPhys.D:Appl.Phys.,Vol.5,1972,pp203*213.==66<<>> S.Mezani,«ModélisationElectromagnetiqueetThermiquedesMoteursàInduction,En
TenantComptedesHarmoniquesd’Espace»,Thèsededoctoratdel’INPL,Juillet2004.==6688>> A.Laporte,S.Mezani,,N.TakorabetO«ADiscreteFourierTransformBasedMethodto
ComputeSteadyStateOperationofInductionMotorsUsingComplexFiniteElements”,14thCompumagConference,July13*17,2003.pp72*73.

RÉFÉRENCESBIBLIOGRAPHIQUES
165
==66??>> A.M.Odok,«StrayLoadLossesandStrayTorquesInInductionMachine»,JournalAIEE,
Avril1958,pp43*53==66@@>> A.Vahedi,«ModélisationetCaractérisationdesMachinesSynchro*ReluctantesSaturées
pardesMéthodesNumériques»,ThèsedeDoctoratdel’INPL,Juillet1996.==66AA>> FernandG.G.DeBuck,«LossesandParasiticTorquesinElectricMotorsSubjectedto
PWM Waveforms», IEEE Transactions on Industry Applications, Vol. IA*15, N° 1,Janv/Fev1979,pp47*53.
==6666>> G.Grellet,«Pertesdanslesmachinestournantes»,Techniquedel’Ingénieur,D3450,pp
1*31==66BB>> P.Silvester,«DynamicResistanceandInductanceofSlotEmbeddedConductors»,IEEE
TransactionsonPowerApparatusandSystems,Vol,PAS*87,N°1,Janvier1968,pp250*256
==66CC>> M. Jufer, « Transducteurs Electromécaniques », Edition Presses Polytechniques
Romandes,1989,VolIX.==BB77>> A.Foggia,«MéthodesdeCalculdesInductancesdeFuites»,Techniquesdel’IngénieurD
3440,pp1*20==BB;;>> S. A. Swann, J. W. Salmon, « Effective resistance and Reactance of a Rectangular
ConductorplacedinaSemi*ClosedSlot»,Proc.I.E.E.,Vol.110,N°9,Septembre1963,pp1656*1662
==BB<<>> OutilsdecalculASYNCH+ASTHERM,dédiéauxcalculdesmachinesasynchroneset
développéparl’équipeledépartementdecalculélectriquedeConverteamMotors.==BB88>> R.Lateb, «Dimensionnement,ModélisationetOptimisationdesMachinesAsynchrones
pourlaPropulsionparPOD,ComparaisondesPerformancesaveclaMSAP», 80pages.==BB??>> J. F. Gieras, M. Wing, «Permanent Magnet Motor Technology, Design and
Applications»,EditionMarcelDekker1997.==BB@@>> R.P.Bouchard,G.Olivier,«Conceptiondemoteursasynchronestriphasés»,Editions
del'EcolePolytechniquedeMontreal,1997. ==BBAA>> M.Liwschitz,L.Maret«Calculdesmachinesélectriques»,TomeIetII,SpesLausanne,
BordasParis,1967==BB66>> F. Deng, «An Improved Iron Loss Estimation for Permanent Magnet Brushless
Machines»,IEEETransactionsonEnergyConversions,Vol.14,N°4,Decembre1999.==BBBB>> Y.K. Chin, J. Soulard, « Modeling of Iron Losses in Permanent Magnet Synchronous
Motorswith fieldWeakeningCapability forElectricVehicles», International JournalofAutomotiveTechnology,Vol.4,N°2,pp87*94,Juin2004.

RÉFÉRENCESBIBLIOGRAPHIQUES
166
==BBCC>> F.Magnussen,Y.K.Chin,J.Soulard,A.Broddefalk,S.Eriksson,C.Sadarangani,“IronLosses in Salient Permanent Magnet Machines at Field Weakening Operation”,InternationalAnnualSocietyIAS’04.
==CC77>> G.R.Slemon,X.Liu,«CoreLosses inPermanentMagnetMotors»,IEEETransaction
onMagnetics,Vol.26,N°5,1990,pp1653*1655.==CC;;>> W. N. FU, Z. J. Liu, « Estimation of Eddy*Current Loss in Permanent Magnets of
ElectricMotorsUsingNetwork*FieldCoupledMultisliceTime*SteppingFiniteElementMethod»,IEEETransactionsOnMagnetics,Vol.38,N°2,Mars2003,pp1225*1228.
==CC<<>> E.Nipp,«PermanentMagnetDriveswithswitchedStatorWindings»,thesedeDoctorat
deTechnologieduSEEITdeStockholm,1999.==CC88>> H.Polinder,M.J.Hoejmakers,«Eddy*CurrentLossesintheSegmentedSurfaceMounted
MagnetsofaPMMachine»,IEEProc.–Electr.PowerAppl,Vol.146,N°3,Mai1999,pp261*266.

55

ANNEXEA:QUELQUESASPECTSDEDIMENSIONNEMENT
167
U*;* Le dimensionnement du circuit magnétique est basé principalement sur des contraintes
magnétiques,thermiquesetmécaniques.Eneffet,leniveaud’inductiondansleferdoitêtrechoisidefaçonànepascréertropdepertesfertoutenlimitantlevolumeetlamassedefer.Ceniveaud’inductionpeutêtredéfiniparlagéométrieetleprincipedeconservationduflux.Lalargeurdesdentsestdéterminéeàpartirdelarelationsuivante:
fdst
ded
kB
BL
ˆ
ˆ1τ
= (A.1)
où:
1ˆeB estl’inductioncrêtedufondamentaldansl’entrefer
dstB est l’induction crête max admissible dans la dent statorique choisie tel que
T.Bdst 81≈
Lepasdentaire dτ estliéaurayond’alésage ar etaunombred’encoche esN par:
es
ad
N
rπτ
2= (A.2)
Lalargeurdesdentsestaussilimitéeparuneautrecontrainte,àsavoir,lalargeurdel’encochequiellemêmeestfixéeparlenombredeconducteursenlargeur,leurdimensions,lesdimensionsdesisolantsduconducteursetdel’encoche.
Généralement,danslesmachinesàgrandepuissance, lesbobinessontpréparéesséparémentpourêtreensuiteintroduitesdanslesencoches.Pourcefaire,l’ouverturedel’isthmedoitêtredemêmelargeurquel’encoche,end’autrestermesl’encochedevraitêtrerectangulaire.
Leslargeursdesconducteurshabituellementutiliséesconditionnentlalargeurdel’encoche eL .En accord avec le constructeur, la largeur de l’encoche doit varier autour de la plagesuivante: mmLmm e 1223 >> .
Lahauteurde laculassepeutêtreobtenueàpartirdufluxparpôleque l’onpeutexprimerpar:
1
/
0
11ˆ2
)sin(ˆeup
p
eauf BLdpBrL τπ
θθφ
π
== ∫ (A.3)
* étantlalongueurutiledustatorPuisqueuniquementlamoitiédufluxparpôleparcourelaculasseonaalorsparconservationduflux:
csf
eacs
Bkp
Brh
ˆ
ˆ1≤ (A.4)
À partir de (A.4) on peut constater que la hauteur de la culasse statorique csh diminue avecl’augmentationdelapolarité p .

ANNEXEA:QUELQUESASPECTSDEDIMENSIONNEMENT
168
*<* %###Enfonctionnementmoteur,laforceélectromotrice(FÉM)induiteestnaturellementinférieure
àlatensiond’alimentation,onaalors:
12 fbsss kNfEV φπ=> (A.5)
où: 1fφ est la valeur efficace du fondamental du flux sous un pôle. Son explicitation en
fonctiondesgrandeursgéométriquesdelamachineconduitàunerelationdonnantuneconditionsurlenombredespires sN :
uaeb
ss
LrBk
V
f
PN
1
22 1π
< (A.6)
Leproduitdurendementparlefacteurdepuissanceimposelavaleurducourantabsorbé,dèslors,quelatensiond’alimentationestfixéeetquelecoupledesortieestimposé.Eneffet,sil’onsefixeceparamètretelque: ]98.090.0[cos −∈× ϕη ,onpeutdéduireuneplagedevariationducourantdephaseàl’aidedel’équationci*dessous:
ϕη
ΓΩ=
cosVI
s
emms
3 (A.7)
où: mΩ estlavitessedurotorenrd/s.
Danslecasdelamachineétudiée,nousobtenons: [ ]835767 −∈sI A.
Laconnaissancede lavaleurducourantabsorbé,etde ladensité sJ decourantfixéepar lemode de refroidissement, permet donc de déterminer la section des conducteurs du bobinagestatoriqueenutilisantlarelation:
sscu JIs /= (A.8)
Ilestclairquecettesection,relativementgrande,estsouventréaliséeparlamiseenparallèledeplusieursbrinssouventrectangulairesdanslescasdesmachinesdefortepuissance.*8* '
La hauteur des aimants permet de fixer le niveau d’induction dans l’entrefer et, parconséquent,laFÉMàvide.Pourunniveaud’inductiond’entreferdonné,lahauteurdesaimantsvarie proportionnellement avec celle l’entrefer. En effet la relation établie entre l’entrefermécanique e etlahauteurdesaimants ah est
)B/B(
ekkh
er
satcrma
11 −
µ= (A.9)
où ck est le coefficient de Carter tenant en compte l’effet de la denture et de satk uncoefficientpermettantde tenircomptede ladesaturation,définicommeétant le rapportde laFMMparpairedepôlesensaturésur laFMMde l’entreferparpairedepôlesen linéaire ==BB??>>.
crrm HB 0/ µµ = estlaperméabilitédereculdel’aimant.
Undimensionnementraisonnablepermetdesituerleniveaud’inductiondufondamentaldansl’entrefer ]1.18.0[ˆ
1 TTBe −∈ .Ladiminutiondel’entreferpermetd’améliorerleniveaud’inductionet offre donc la possibilité de réduire la hauteur de l’aimant, toutefois des contraintes deconstructionsmécaniquesnepermettentpasderéduireindéfinimentl’entrefer.Parailleurs,cette

ANNEXEA:QUELQUESASPECTSDEDIMENSIONNEMENT
169
diminution se fait aussi au détriment d’une accentuation de l’effet du couple de détente(amplitude) et de la saturation de la denture. Inversement, l’augmentationde l’entrefer atténuel’effet de la denture mais affecte, naturellement, l’amplitude du fondamental de l’inductiond’entrefer,d’oùlanécessitéd’uncompromis.
Àpartirde l’équation (A.9),onpeutavoiruneplagedevariationde lahauteurde l’aimant enfonctiondel’épaisseurdel’entreferetduniveaud’inductiondansl’entrefertellequeillustréeparlafigure(A.1):
FigureA.1:Plagedevariationdelahauteurdesaimantsobtenueparl’expression(A.9)
Un aspect important, auquel on doit prêter attention, concerne la désaimantation (oudémagnétisation)desaimants.Eneffet,enprésenced’unfortcourantetunetempératureélevée,les aimants peuvent être démagnétisés de manière irréversible. La figure (A.9) montre lacaractéristiquedel’aimantNd*Fe*Bpourunetempératureambiante(20°C)etunetempératurede fonctionnement limite (100°C) au*delà de laquelle la désaimantation devient quasimentinévitable.Lepointcritiquededésaimantationàtempératuredefonctionnementlimiteestdonnépar les coordonnées ( 22 , + ), l’induction critiquededémagnétisation 2 estpositive.Parconséquent,lorsdecefonctionnement,enprésencedecourantsstatoriquesl’inductionrésultantedanslesaimantsdoitêtresupérieureà 2 .
BD1
BD2
Br1
Br2
HD2
HD1
Hc1
Hc2
20°C
100°C
H
20°C Droite de charge 100°C
1mB
2mB
ai hF
3mB
4mB
1rB
2rB
mB
mH
FigureA.2:Pointdefonctionnementdel’aimant
La figure (A.2) montre que les courbes représentant les caractéristiques de l’aimant par
température étudiée sont quasi parallèles (en partant de l’induction rémanente au coude de lacaractéristique).Onpeutdonc étudier l’influencede la température sur les performancesde lamachine pour peu que l’on travaille au dessus du coude de désaimantation irréversible. Nousrappelonslesformulationspermettantdemettreenreliefl’effetdelatempératuresurl’inductionrémanentedesaimants.

ANNEXEA:QUELQUESASPECTSDEDIMENSIONNEMENT
170
))(1( 00 ϑϑκ −−= arr BB (A.6)
avec 0rB l’induction rémanente de l’aimant à température ambiante 0ϑ alors que aκ est lecoefficientdetempératuredelarémanence.
1 es B ˆ
min _ a B
θ π
Induction d’ entrefer d ue à l’alimentation seul e
β
ea B
Induction d’entrefer d ue à l’aimant seul
Induction résultante
pα m
(a) °=β 90 électriques
1 es B ˆ
min _ a B
θ
pα m
π
Induction d’ entrefer d ue à l’alimentation seul e
β
ea B
Induction d’entrefer d ue à l’aimant seul
Induction résultante
(b) °=β 180 électriques
FigureA.3:Distributiondel’inductiond’entreferrésultante(traitcontinu)enfonctionde β
Dans unemachine à pôles lisses, le fonctionnement à couplemaximum intervient lorsque lescourants sont en phase avec la FÉM à vide, en d’autres termes lorsque le fondamental del’inductioncrééeparlescourantsstatoriquesestenquadrature( °= 90β électrique)parrapportàl’induction créée par les aimants. La figure (A.3.a) représente le cas de fonctionnement où
°= 90β ,l’inductionrésultanteestillustréeentraitcontinugras.Danscecas,l’inductionminimaledanslesaimants min_aB doitêtresupérieureà 2 .Onconstatequeladésaimantationintervient
demanièrelocalesurlesbordsdesaimants.Dans un autre cas (en court*circuit), l’induction créée par les courants statoriques est enopposition de phase par rapport à l’induction créée par les aimants ( °=180β électrique). Leszonesoul’inductionestfaibleestplusgrandeetcouvrelaquasi*totalitédel’aimant(voirfigure(A.3.b)).L’induction minimum min_aB dépend à la fois de l’intensité du courant statorique et de la
hauteurdesaimants.Ledimensionnementdesaimantsdoit êtreeffectuéenconsidérantcecaslimite.

ANNEXEA:QUELQUESASPECTSDEDIMENSIONNEMENT
171
Pour calculer la hauteur minimum de l’aimant, permettant d’éviter une démagnétisationirréversible sous des conditions de fonctionnement inhabituelles et à température defonctionnement limite, on seproposedemodéliser l’aimantparune sourcedeThévenin ==BB??>>,l’entreferparuneréluctanceetlesampèretoursparunesource,telquereprésentéparlecircuitéquivalentsimplifiédelafigure(A.4),lesarmaturessontconsidéréesdeperméabilitéinfinieetlesfuitesdesaimantssontnégligées.
+ -
+
-
- +
+ -
caa HhF =
arm
aa
s
hR
0µµ=
e
satcg
s
ekkR
0µ=
iF
aa sB=φ
Aim
an
t
Entrefer
Am
pèr
e to
urs
FigureA.4:Circuitmagnétiqueéquivalentdel’ensembleaimant,entreferetFMM
Ducircuitmagnétiqueéquivalentonobtientl’équationsuivante:
0=−φ−φ− ieaa FRRF (A.10)
enexprimantlesgrandeursdebasesenfonctiondesgrandeursgéométrique,nousobtenons:
0
0
µµ−
+µ=
rmac
isatcaa
/BH
Fekk)/B(h (A.11)
avec ea ss = Sionconsidèreunsystèmetriphasé 3=m équilibré,montéenétoile,ayant sN spiresparphaseet
alimentéparuncourantd’amplitude .Lasommedescourantsdephaseétantnul,l’amplitudedufondamentaldelaFMMrésultantes’écrit==??BB>>:
a
INkF s
sbr
ˆ3ˆ11
π= (A.12)
1bk et a représententrespectivementlecoefficientdebobinagedufondamentaletlenombredevoiesparallèlesdanslamachineconsidérée.Pour évaluer la hauteurminimumnécessaire évitant une démagnétisation irréversible lors d’unfonctionnement transitoireou inhabituel etpourune températurede fonctionnementde95°C,onreformulel’expression(A.11)demanièresuivante:
0
0
9595
95
µµ
°−°
+µ
°
=
rm
Dc
max,isatcD
min,a )(B)(H
Fekk)(B
h (A.12)
max,iF représentel’amplitudedelaFMMadmissible.
En d’autres termes, l’augmentation de la hauteur des aimants pour un entrefer donné permetd’augmenter la pente de la droite de charge que cela soit à vide ou en présence d’un courantdémagnétisant (voir figure (A.5)) et par conséquent un «éloignement» du point defonctionnementducoudededémagnétisationirréversible,auprixtoutefoisd’unvolumed’aimantetd’uncoûtplusimportants.

ANNEXEA:QUELQUESASPECTSDEDIMENSIONNEMENT
172
Enutilisantl’équation(A.12)etenimposantparexemplel’amplitudeducourantmax commeétant 250% celui du courant admissible onobtient l’évolution de la hauteur des aimants de lafigure(A.5)enfonctiondel’entrefereffectifetdufondamentaldel’inductiond’entreferà20°Cet95°A.
(a)vuedeface (b)vuedecôté
FigureA.5:Plagedevariationdelahauteurdesaimantsobtenueparl’expression(A.7)(deuxvues)
La figure (A.5) montre l’évolution de la hauteur en fonction de la température dans desconditionsencharge.Naturellement,pourunetempératureplusélevée(95°C),lahauteurchoisiepouréviterunedémagnétisationestplusélevée.Enréalité,lesformesd’ondesserontrelativementdifférentes,principalement,àcausedufaitqueles aimants sont segmentés. Pour cela, nous avons simulé par éléments finis la MSAP deréférence en condition de fonctionnement normal à température ambiante et relevé la formed’ondedel’inductionaumilieudesaimants.Lafigure(A.6)metenévidencel’inductionrésultante
resB issuedel’inductiondueauxaimants aimantB etdel’inductionlimaB dueàl’alimentation.La
segmentation de l’aimant se traduit par l’apparition de flux de fuites (indiqués par unencadrementcarré)quiapparaissentaussiauxextrémitésdechaquepôleetquiparconséquentsetraduitparuneformed’onderelativementdifférenteàcelleillustrativedelafigure(A.3.a).

ANNEXEA:QUELQUESASPECTSDEDIMENSIONNEMENT
173
0 50 100 150 200 250 300 350-1.5
-1
-0.5
0
0.5
1
1.5resB
limaB
aimantBmin_aB
Induct
ion [
T]
β
FigureA.6:Formed’ondedel’inductionaumilieudesaimantspourunfonctionnement
normal
*?* Pourcequiestducontenuharmoniquedescourantsdephase,lesmachinesélectriquessont
alimentéespardesonduleursdetensioncommandésencourant.C’estlecasdel’applicationquinous intéresse. Les onduleurs sont de type MLI naturelle, avec une porteuse triangulaire defréquencedehachage df relativementélevée.Parconséquent, lesharmoniques 'h de courantserontderangélevés,lespremiersharmoniquesapparaissantdanslespectreducourantontunefréquence voisine la fréquence de hachage df , qui est souvent très grande devant celle dufondamental.
Généralement,lorsquel’onadoptelaMLInaturelleàréférencesinusoïdale,onchoisilafréquence
de hachage df demanière à ce que l’indice demodulationf
fm d= soit multiple de 3 de la
fréquenced’alimentation f ,ainsionsupprime==AA;;>>:• l’harmonique de rang fm situé au centre de la première famille d’harmoniques defréquence fkfd ± ,
• lesharmoniquesdetouteslesfamillesdefréquence fkfk d 3±′ ,
• lesharmoniquesdetouteslesfamillesdefréquence dfk .Parailleurs,deparlanaturedelaMLIadoptée,ilnesubsistequelesharmoniquesdefréquence
fkf'k d ± avec k'k + un nombre entier impair avec k n’étant pas un multiple de 3 ==AA;;>>.L’augmentationdel’indicedemodulationm rejettelespremiersharmoniquesnonnulsversdesfréquencesélevéesetfacilitedonclefiltrage.Nousn’entreronspasplusdanslesdétailsdesmoyensderéductiondesharmoniquesdecourant,puisque cette partie relève plutôt de l’alimentation et non de la conception de la machine.
Position[°élec]

ANNEXEB:LEVRILLAGE
174
+* /DLevrillagedustatordans lesmachinesàaimantspermanentsesthabituellementutilisédans lespetitesmachinesoùlamiseenœuvreestrelativementsimple.Ceprocédéestmoinsévidentpourlesmachinesdefortepuissance.
Le vrillage du rotor est une technique très répandue dans la construction des petitsmoteurs asynchrones à cages d’écureuil. C’est un vrillage «continu» permettant d’annuler lescouplesdedentures.Levrillagecontinudesaimantspeutêtreréalisésurdespetitesmachinesparusinageavantleurmontagesurlerotor.C’estuneopérationdélicateetcoûteusequinepeutêtreréaliséequesurdesapplicationsparticulières.Onpeutaussiimaginerdesmachinesàaimantsoul’aimantationvrilléeest réaliséeaprèsmontage.Pourcela il faudraitdisposerd’un«aimanteur»particulierpourchaquemachine.Devantcesdifficultéstechniques,l’usageconsisteàeffectuerunvrillage discret par subdivision des aimants dans le sens axial en un certain nombre d’aimantsélémentaires. Les aimants sont ensuite disposés sur le rotor avec un décalage angulaire biendéfini.Lafigure(B.1)montreunexempleoùlesaimantsrotoriquessontsegmentésaxialementen3blocsélémentaires.
vθ
FigureB.1:Illustrationd’unvrillagediscontinudesaimants
det C
r α
FigureB.2:Exempledeformed’ondeducouplededétentesurunepériode
Le choix de l’angle de vrillage et du nombre de segments élémentaires dépend de plusieursfacteurs.Nousneconsidéronspasicilescontraintestechnologiquesetnousmettonsenéquationl’influenceduvrillageafind’entirerdesconclusionsquiparfoissontévidentes.Lecouplededétenteestpériodique(figure(B.2))etpeuts’écriresouslaforme:

ANNEXEB:LEVRILLAGE
175
)sin()( ,
1
det nresp
n
nr NnCC ϕαα −=∑∞
=
(B.1)
Rappelonsquelefondamentalducouplededétenteestgouvernéparlenombre espN , quiest
lepluspetitmultiplecommunentrelenombred’encochesetlenombresdepôles.
La subdivisionaxialedesaimantsen sblocsdécaléesd’unangle vθ conduit àuncouplededétentedontl’expressiondevient:
∑∑−
=
∞
=
−−=1
0
,
1
,det, ))(sin(1
)(
s
sn
nvsresp
n
nrres nNnCs
C ϕθαα (B.2)
Letraitementdel’équation(B.2)etl’utilisationdequelquesrelationstrigonométriquesdonnel’expressiongénéraleducouplededétente:
−+
−=
∑
∑ ∑
−
=
∞
=
−
=
1
0
,,
1
1
0
,,det
)sin()cos(
)cos()sin(1
)(
s
sn
vespsnresp
n
s
sn
vespsnrespnr
NnnNn
NnnNnCs
C
θϕα
θϕαα
(B.3)
Sil’onsouhaiteannulerunharmoniquedonné,l’angle vθ doitvérifier:
0)sin(et 0)cos(
1
0
,
1
0
, == ∑∑−
=
−
=
s
n
vesps
s
n
vesps
ss
NnnNnn θθ (B.4)
Nousavonsdonc:
±
=
espespv
Nn
k
sNn ,,
212 ππθ (B.5)
End’autrestermes,siondésireannulerlefondamentalducouplededétente( 1=n ),ilsuffitdechoisirpourunnombredesegmentationsaxiales s unangle vθ lepluspetitpossiblevérifiantlarelation(B.4)desorteànepasaffecterlaFÉMdephase.Soitalors:
=
sN espv
12
,
πθ (B.6)
Cerésultat,évident,indiquetoutsimplementquelasegmentationaxialeen s blocsd’aimantsdoitsefaireavecunanglededécalageentredeuxaimantssuccessifsquivaut s/1 delapériodeprincipaleducouplededétente.
D’un autre coté, en injectant cette valeur de vθ dans les différents termes de (B.4), nousobtenons:
0)sin(et sinon0
si)cos(
1
0
,
1
0
, =
=
= ∑∑−
=
−
=
s
n
vesps
s
n
vesps
ss
Nnnskns
Nnn θθ (B.7)
k , n et s étantdesnombresentiers.

ANNEXEB:LEVRILLAGE
176
L’expression(B.2)ducouplededétentedevient:
=−
=∑
∞
=
sinon 0
)sin()(
,
1det,
sknsiNnCC
nresp
n
n
rres
ϕθθ (B.8)
Lesrelations(B.6),(B.7)et(B.8)signifientquelechoixd’unangle vθ permettantd’annulerlefondamental du couple de détente, pour un nombre de segmentations axiales s , permetd’annuler aussi les autres harmoniques n contenus dans le couple de détente à l’exception deceuxquisontmultiplesdunombredesegments s .Cetaspect intéressantpermetdemettreenreliefl’intérêtdechoisirunnombredesegmentationsaxiales s relativementgranddemanièreàréduireconsidérablementlecouplededétente.
(a)sansvrillage (b)avecvrillage
FigureB.3:Effetduvrillagediscontinusurlecouplededétente
Lafigure(B.3)montrel’allureducouplededétentedelamachineenfonctiondunombredesegmentsélémentaires.Lafiguredegauche,montrelecouplededétented’unemachinedontlerotorn’estpasvrilléalorsquelafigurededroitemontrelecasd’unvrillageavec 24et 3,2=s .Nous avons poussée le vrillage discontinu jusqu’à une valeur très grande 42=s et quasimentirréalisableafindeserapprocherd’unvrillagecontinu.
Notonsd’oresetdéjàquelevrillageendeuxou3segmentspermetdebaisserlavaleurcrêtedu couple de détente depuis 500 N.m jusqu’à des valeurs très faibles (60 N.m) alors que lepassageà24segmentspermetencorederéduirelecouplededétente(25Nmcrête).
Toutefoisilsubsistedessub*harmoniquestelqueceluidedenturequinesontpasfiltrerparlevrillageadopté,ainsipourunemeilleurfiltrageilestprudentdechoisirunangledevrillagediscret
νθ parrapportaupasdentaire
sN es
12πetnonparrapportàlapériodeducouple
sN esp
12
,
π,
cequiàpour intérêtde filtrer tout lesharmoniques,àpartirdeceluide ladenture (hormis lesmultiples de s ). Comme on peut le voir sur la figure (B.3.b) où le vrillage à 42=s
et
=
12
1
esN
πθν faitsubsisteruniquementlesharmoniquesderang 42 (etsesmultiples)
Àl’instarduvrillageclassique,levrillagediscontinuatténueratouslesharmoniquesdelaFÉMy compris le fondamental mais dans des proportions beaucoup plus faibles comparé à la

ANNEXEB:LEVRILLAGE
177
réductionducouplededétente.Eneffet,uncalculthéoriquetenantcomptedel’effetduvrillagepermetd’introduireuncoefficientd’inclinaisonquiaffectelesharmoniquesdelaFÉM:
2/
)2/sin(
inc
incv
h
hk
θ
θ= (B.9)
Où incθ est l’angletotaled’inclinaisonquidoitêtrecomparéà vsθ dans lecasdiscret.Ilestévident que vu les valeurs des angles d’inclinaison, l’effet de ce coefficient sur les premiersharmoniquesdelaFÉMestfaible.
Pourmettre en évidence et quantifier les phénomènes, nous allons analyser le contenu duspectreharmoniquedelaFÉMentrephasespour5casdeconfigurationspourlamêmemachineayantunépanouissementtotaldesaimants,munied’unbobinagestatoriqueutilisant15encoches
par paire de pôle et un pas raccourci ème1512 . Ce qui différencie les 5 configurations estl’architectureaxialedurotor;les5cassont:
1. pasdevrillagedesaimants.
2. vrillagedesaimants: 2=s et
=
2
1
240
2πθv
3. vrillagedesaimants: 3=s et
=
3
1
240
2πθv
4. vrillagedesaimants: 24=s et
=
24
1
240
2πθv
5. vrillagedesaimants: 24=s et
=
24
1
120
2πθv
La figure (B.4) montre la forme d’onde des FÉM entre phases pour les cas énumérés ci*dessus. L’analyse spectrale de ces formes d’ondes est résumée dans la figure (B.5) où sontprésentéslesprincipauxrangsharmoniquesainsiqueletauxdedistorsionharmoniquedelaFÉM
habituellementdéfinipar1
1
2
G
G
TDHh
h∑∞
>= (G:grandeur):
Bienque lavariationde la formed’ondeet l’amplitudede laFÉMentrephasesne soitpasperceptibleàl’œilnu, ilestnéanmoinsévident,àtraversl’analysespectraledesformesd’ondes,quelecontenuharmoniquedépenddel’épanouissementetduvrillage.Encoreunefois,l’analysedéveloppéelorsdupré*dimensionnementàproposdel’épanouissementdesaimantsestvérifiéepuisque l’on observe bien qu’un épanouissement de °= 154mpα réduit considérablement
l’harmoniquederang7etqu’unpasderaccourcissementde ème1512 annulel’harmoniquederang5.Naturellement,l’associationd’unépanouissementadéquatavecunvrillagedesaimantspourleraccourcissement suscité offre le plus faible taux d’harmonique de la FÉM à vide commel’indiquelafigure(B.5.e)audétrimenttoutefoisd’unebaissedufondamental.

ANNEXEB:LEVRILLAGE
178
p,
FigureB.4:Formed’ondedelaFÉMentrephasespourlescasétudiés
Fondamental de la FEM entre phases
7656,176987699,747701,77712,26
2000
3000
4000
5000
6000
7000
8000
a b c d e
Cas d'étude
[V
]
0
0,1
0,2
0,3
0,4
0,5
0,6
7 11 13 TDHHarmoniques
%
abcde
FigureB.5:FondamentaletcontenuHarmoniquedelaFÉMentrephasespourlescasétudiés

ANNEXEC:LespertesdanslaMSAP
179
*;* #4
LespertesJouledanslecuivrestatoriquedelamachinepeuvents’écriredemanièregénérale:
23 ssjs IRP = (C.1)
, représentelarésistanceéquivalentedelaphasedistribuéesur voiesparallèlesetayant sN spiresparvoie.
+=
a
N
s
LLR s
cu
tbus
2)(ϑρ (C.2)
)(ϑρ représentelarésistivitéenfonctiondelatempératureϑ
tbL représente la longueur d’un côté des têtes de bobines et peut se calculer de manièresuivante:Si on considère dans notre cas des bobines préformées faites de conducteurs rectangulaires etinsérées dans des encoches ouvertes (Figure (C.1)), la longueur des têtes de bobines s’obtientalors,parlarelationsuivante==BB@@>>==BBAA>>:
)tan()2/(2 ατ
τπea
p
racctbtbtb hr
pobL +++= (C.3)
Ladistance tbe etlalongueur tbb delapartiedesbobinesquiexcèdelaculassedépendentdelatension appliquée aumoteur.La longueur tbo de laboucle (œillet) quipermetdepasserde lapartiesupérieureàlapartieinférieuredel’encocheestliéeauxtechniquesdefabrication.
Stator
tbe
tbo
tbb
tbex
ct
α
Pas d’enroulement
ew
tben
tbo
FigureC.1:Formeetdispositiondestêtesdebobinesrigidespréformées
a
N
S
I)LL()(P s
cu
stbujs ××+×ϑρ=
2
23 (C.4)
Àdensitédecourant cJ fixéedans leconducteurélémentaireetà longueurutile * constante,onpeutidentifierlesparamètresagissantsurlespertesJoulestatoriquesdansl’équation(C.4).*<* #3#
Nous nous intéresserons principalement aux pertes fer dues à l’induction à fréquence dufondamental. Elles incluent naturellement les pertes par hystérésis, les pertes par courants deFoucault et les pertes par excès dues aux effets des domaines ==BB66>>==BBBB>>==BBCC>>. L’expression despertesferestalors:

ANNEXEC:LespertesdanslaMSAP
180
dtdt
dBf
kkdt
dt
dBf
kkBfkk
PPPP
T
exf
T
Ff
nhf
excFouchystfer
∫∫ +
+=
++=
2/3
4/32
2
2 )2(2ˆ
ππ
(C.5)
hk estlecoefficientd’hystérésis,
exk estlecoefficientparexcès,
Fk estlecoefficientdespertesparcourantdeFoucault,
fk estlecoefficientdefoisonnementdestôles.
hk et exk sontobtenusenutilisantlesdonnéesdesmatériauxsurlespertesspécifiques.
Fk estliéàlaconductivitéσ ,ladensitévolumiqueδ etl’épaisseur d destôles.
Habituellement Fk estdonnéparlarelationδ
πσ
6
)( 2d
kF = .
Lespertesferdanslesmachinesàaimantssontgénéralementévaluéesàvide,maisdesméthodesdecalculdespertesferenchargeouenmodedéfluxageexistent==BBCC>>.Pourlesbesoinsd’unpré*dimensionnement nous estimerons les pertes fer à vide en utilisant l’approche détaillée dans==BBBB>>==CC77>>.Leniveaudel’inductiondanslesdentsdiffèredeceluidanslesculassesetplusparticulièrementleursformesd’onde.Pourunemeilleureestimation,onsubdiviselaculassestatoriqueenquatrerégionsdistinctescommel’illustrelafigure(C.2):
Ø larégion(1)représentantlapartiedesdentscontiguësauxisthmesd’encoches.Ø larégion(2)délimitantunepartiedesdents,Ø larégion(3)délimitantl’extrémitédeladentetledébutdelaculasse,etØ larégion(4)représentantlaculasse.
Région (4)
Région (1) Région (3)
Région (2)
FigureC.2:Subdivisiondelaculassestatoriqueenplusieursrégions
Certaineshypothèsessontàconsidérées:• Laprincipalecomposanted’inductionsourcedepertesferdanslesdentsestlacomposanteradiale.• Laprincipalecomposanted’inductionsourcedepertesferdanslaculasseestlacomposantetangentielle

ANNEXEC:LespertesdanslaMSAP
181
• Dansleprolongementdeladent(région3)etledébutdeladent(région1),lacomposanteradialedel’inductionestprivilégiéedevantlacomposantetangentiellePourappuyer leshypothèsesnousmontronssur lafigure(C.4), ladirectionde l’inductiondanslespartiesdelaculassestatoriqueetlesdents.
FigureC.4:Lignesdefluxetdirectiondel’induction(flèches)danslaculassestatorique
Au regard des hypothèses, L’induction dans les dents présente une variation trapézoïdale enfonction du temps alors que l’induction dans la culasse est plutôt sinusoïdale lorsque le rotortourne.Lesfigures(C.5)et(C.6)montrentl’alluredel’inductiondansceszonescalculéessurlamachine de référence lorsque le rotor tourne d’une période électrique.En évaluant la dérivée
dtdB onobtientlaformulationdespertesferdanslecasoùlepasdentairen’excèdepasl’espaceinterpolaire==BBBB>>==CC77>>.
• Danslesdents
++= 2/3
4/322
_ )ˆ(4
ˆ4ˆ
dd
excF
d
dndhfdfer Bf
p
kk
p
BfBfkkP
τπτπ(W/m3) (C.6)
• Danslaculassestatorique
++= 2/3
4/322
_ )ˆ(8ˆ8ˆ
stm
excF
m
stnsthfstfer Bf
p
kk
p
BfBfkkP
απαπ(W/m3) (C.7)
La formulation (C.6) est appliquéeaux régions (1) (2) et (3), alorsque la formulation (C.7) estutiliséepour la région (4).L’approcheanalytiqueproposéeconsidère lavariationde l’inductiondanslesdentssurunpasdentaire dτ (endegrésmécanique)etlavariationdel’inductionsurunépanouissement mα (endegrésmécanique)d’unpôled’aimants.
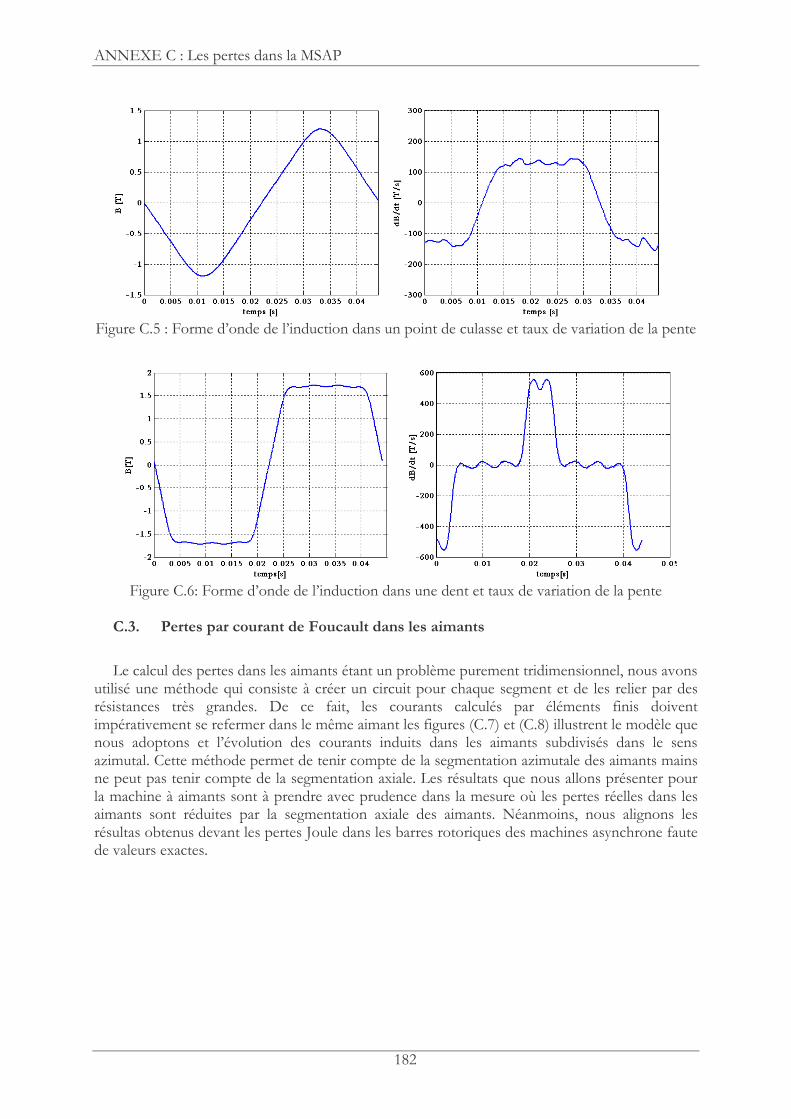
ANNEXEC:LespertesdanslaMSAP
182
FigureC.5:Formed’ondedel’inductiondansunpointdeculasseettauxdevariationdelapente
FigureC.6:Formed’ondedel’inductiondansunedentettauxdevariationdelapente
*8* #$
Lecalculdespertesdanslesaimantsétantunproblèmepurementtridimensionnel,nousavonsutiliséuneméthodequiconsisteàcréeruncircuitpourchaquesegmentetde lesrelierpardesrésistances très grandes. De ce fait, les courants calculés par éléments finis doiventimpérativementserefermerdanslemêmeaimantlesfigures(C.7)et(C.8)illustrentlemodèlequenous adoptons et l’évolution des courants induits dans les aimants subdivisés dans le sensazimutal.Cetteméthodepermetdetenircomptedelasegmentationazimutaledesaimantsmainsnepeutpastenircomptedelasegmentationaxiale.Lesrésultatsquenousallonsprésenterpourlamachineàaimantssontàprendreavecprudencedanslamesureoùlespertesréellesdanslesaimants sont réduites par la segmentation axiale des aimants. Néanmoins, nous alignons lesrésultasobtenusdevantlespertesJouledanslesbarresrotoriquesdesmachinesasynchronefautedevaleursexactes.

ANNEXEC:LespertesdanslaMSAP
183
R∞
Aimantnord
Aimant nord
Aimant nord
R∞ R∞
Aimantnord
R∞ R∞ R∞
R∞
Aimantsud
Aimantsud
Aimant sud
R∞ R∞
Aimantsud
R∞ R∞ R∞
R∞
R∞
Axi
al
Azimutal
a+
a+
a+
a+
a+
a-a-
a-a-
a-
b+
b+ b+
b+b+
b-
b-b-b-b-
c+c+
c+c+c+
c-
c-
c- c-
c-
FigureC.7:Représentationdesrésistancesdeconnectionsinter*aimantssurunepairedepôles
∫∫∫ −=⋅s
c
a sdBdt
dldJ
.ρ
B
J
FigureC.8:IllustrationduphénomènedescourantsdeFoucaultdanslesaimants
Lespertesdanslesaimantsontplusieursoriginesquenousrassemblonsentroiscatégories:
Pertesduesauxharmoniquesdebobinage(d’espace).
Pertesduesauxharmoniquesdecourantsdusàl’alimentationparMLI.
Pertesduesàladenturestatorique.
Pourséparerlesdifférentespertescitéesplushaut,nouseffectuonslessimulationssuivantes:
1. Lespertesduesà l’interactiondesharmoniquesd’espaceavec le fondamentalde tempssont évaluées en effectuant une simulation dans laquelle la machine est alimentée ensinusoïdal, le rotor tournant à la vitesse nominale, les aimants sont inactifs.Ces pertessontnotées 1hP .
<* Pourdéterminerlespertesduesauxharmoniquesdetemps,nouseffectuonsuncalculenintroduisantlefondamentaletlesharmoniquesdetempsdescourants.Lerotortournantà la vitesse nominale et les aimants sont inactifs. Les pertes totales calculées dans ces

ANNEXEC:LespertesdanslaMSAP
184
conditionssontnotées 2hP .Ladifférence )( 12 hh PP − représenteainsilespertesdanslesaimantsduesauxharmoniquesdecourant.
3. Pourcalculerlespertesduesàladenture,nouseffectuonsunesimulationdanslaquellelesaimantssontactivésetlescourantssontnuls.Lavariationdel’inductiondanslesaimantsdueàladentureestlaseulesourcedepertesdanslesaimants.Lespertescalculéesdanscesconditionssontnotées 4hP .
4. Enfin,uncalculesteffectuéentenantcomptedetoutlesphénomènes(fondamentaldetemps,harmoniquesMLI,aimantsactifs).Nouslesindiqueronsparlespertestotales.
NousobtenonsfinalementlesrésultatsdutableauA.1.
TableauC.1:Pertesobtenuesenmagnéto*évolutif(pasàpasdansletemps) ## FT
PertesparcourantdeFoucaultdanslesaimantsduesauxharmoniquesd’espaces 1hP 3.26
Pertes par courant de Foucault dans les aimants dues aux harmoniques de temps)( 12 hh PP −
1.67
4hP 1
Pertestotales 6
LesrésultatsprésentésdansletableauC.1semblemettreenévidencelespointssuivants:
• Lespertes issuesdesharmoniquesd’espacessontplusprépondérantesdevant lespertesduesauxprincipauxharmoniquesdetemps.
• Les pertes dues à la variation de l’induction de l’aimant par la denture sont estimées àenviron17%despertestotalesparcourantdeFoucault.
Sanstenircomptedelasegmentationaxialequiréduiraitdebeaucouplespertes,latotalitédespertesestde6kWsoit0.088%delapuissancemécanique.
Unaspectintéressantmaisquin’apasfaitl’objetdenotreétudeestl’effetdelasegmentation(axiales et azimutales) des aimants sur l’évolution des pertes, à ce titre, il est intéressant de seréférerauxtravauxfaitdanscesens==CC;;>>==CC<<>>==CC88>>.

ANNEXED:InfluencedelatempératuresurlesperformancesexternesdelaMSAP
185
*;* #!#5 (
Danscettepartie,nousallonscomparerlesperformancesdelamachinederéférenceréaliséeetcellesdelamachine(MSAP2)issuedenotredimensionnementavecunelégèremodification.Nousmettonsl’accentsurl’influencedelatempératuresurlesperformancesdesdeuxmachines,car de façon générale, l’augmentation de la température ambiante modifie les propriétés desaimantsetducuivre.
Lesprincipalesdonnéesgéométriquessontrésuméesdans le tableau(D.1),naturellement lesdimensionsgéométriquesdustatorsontidentiques,lesseulesvariationssesituentdansl’entreferetl’épanouissementdesaimants.
La figure (D.1)montre les formesd’ondede laFÉMàvideentrephases,L’amplitudede laFÉMpourlaMSAPderéférenceestde7692.3Valorsqu’elleestde7502.6VpourlaMSAP2soitune diminution de 2.46%, l’augmentation de la température se traduit par une pertes enamplitudedelaFÉMentrephasesde7.4%.
TableauD.1:Principalesdonnéesgéométriques
MSAPderéférence
MSAP2
Rayond’alésage(mm) 700 700Rayonexterne(mm) 875 875Epanouissementdesaimantsàlabase(°électriques) 150 154Longueurdufer(mm) 2450 2450Longueurdelatêtedebobine(mm) 477 477Entrefer(mm) 6 7Encombrement(m3) 7.34 7.34Nombredepôles 16 16Nombred’encochesstatoriques 120 120Massetotales(sansculasserotoriqueetassises)(kg) 15577 15600Massedesaimants(kg) 1994 2017
95°C
Temps [s]
FE
M à
vid
e en
tre
Phas
es [
V] 95°C
Temps [s]
FE
M à
vid
e en
tre
Phas
es [
V]
(a)MSAPderéférence (b)MSAP2
FigureD.1:Formesd’ondesdelaFÉMentrephasesà20°Cetà95°C

ANNEXED:InfluencedelatempératuresurlesperformancesexternesdelaMSAP
186
0
0,1
0,2
0,3
0,4
0,5
0,6
h7 h11 h13 THD
%
MSAP référence MSAP2
0
0,1
0,2
0,3
0,4
0,5
0,6
h7 h11 h13 THD
%
MSAP référence MSAP2
(a)à20°C (b)à95°C
FigureD.2:ContenuharmoniquedelaFÉMentrephases(àvide)L’analyseharmoniquedelaFÉMentrephasesprésentéedanslafigure(D.2)montre,pourla
températureambiante,quel’harmonique7estquasimentnul(0.001%)pourlamachineMSAP2,ce qui nous conforte sur le choix de l’épanouissement des aimants. Les autres principauxharmoniquesainsiqueletauxdedistorsionharmoniques(THD)sontplusfaiblepourlaMSAP2.L’augmentation de la température se traduit par une réduction du taux harmoniques dans lesdeuxmachinesavectoutefoisunelégèreaugmentationdel’harmonique7.
(a)MSAPderéférence (b)MSAP2
FigureD.3:Evolutiondesinductancesenfonctiondelapositionetde γ

ANNEXED:InfluencedelatempératuresurlesperformancesexternesdelaMSAP
187
Nous avons identifié les inductances incrémentales et ce pour chaque point defonctionnemententenantcomptedelasaturationetdelapositiondurotor.
La figure (D.3)montre l’évolutiondes inductances incrémentales en fonctiondudéphasage(γ ) et de la position. Habituellement en mode de défluxage, dans les machines à aimantspermanents montés en surface, la composante en quadrature du courant est relativementsupérieureàlacomposantedirecteducourant(envaleurabsolue),prenantencomptecetaspectγ variede–30°à5°.
LastructureétantidentiquedanslesdeuxMSAPretenues,ons’aperçoitnaturellementquelecomportement des inductances en fonction du déphasage mais aussi de la position, est quasiidentique,avectoutefoisuneimperceptibledifférencedansleniveaud’ondulations.
Lecomportementdesinductancesvisàvisdelavariationdelatempératureestnettementmisenévidencedanslesalluresdelafigure(D.4).L’augmentationdelatempératureà95°Csetraduisantpar une diminution de l’induction rémanente de l’aimant, le niveau de saturation est moinsprononcé dans les parties saturables de laMSAP, ce qui en toute logique se répercute sur lesinductancesquiprésentedesvaleurssupérieurescomparéesàcellesobtenuesàlatempératurede20°Cetaumêmepointdefonctionnement.
(a)MSAPderéférence (b)MSAP2FigureD.4:Evolutiondesinductances(envaleurmoyenne)de γ

ANNEXED:InfluencedelatempératuresurlesperformancesexternesdelaMSAP
188
FigureD.5:EvolutionduTauxd’ondulationdesinductancespropresenfonctionde γ
Lafigure(D.5)montrelesondulationsdesprincipalesinductancesenfonctiondel’angle γ .Lesondulationsdelacomposanteenquadrature qqiL s’intensifientlorsqueledéphasage γ estvoisin
de zéro. Cela est dû au niveau de saturation des dents situées sur l’axe q qui augmente avecl’intensitéde lacomposanteenquadratureducourant, intensifiantainsi lecontenuharmoniquedel’inductancepropre qqiL .Lacomposante ddiL augmenteavecl’intensitédelacomposante qsi ,
passeparunmaximumpuisdiminue.La diminution du taux d’ondulation de ddiL est due au fait que certaines parties communes àl’axe d et q sontmoinssaturéesréduisantletauxd’ondulations.Enoutre,onremarquequelapentedutauxd’ondulationsdelacomposante ddiL estplusraideetqueletauxd’ondulationestplus important, ceci est naturellement dû au fait que les principales parties qui subissentfortementlasaturationsontcellesenfacedesaimants.L’augmentation de la température ayant réduit l’intensité de l’induction des aimants, toutnaturellement on s’aperçoit que le taux d’ondulations est réduit pour la composante qqiL . Par
contre,letauxd’ondulationsdelacomposante ddiL estplusimportantsurcertainesplagede γ (soit °−=γ 5 ).Delafigure(D.6)quireprésentel’allureducouplelorsquelecourantestenphaseaveclaFÉMàvide,onobservebienl’effetdelatempératuresurlavaleurmoyenne,quiestencorepluslisiblesurl’histogrammedelafigure(D.7).Letauxd’ondulationducoupleestplusfaible,commeonpeutlevoirsurlafigure(D.8),danslecas de la MSAP2, ce qui confirme que l’analyse faite sur le dimensionnement est bonne, latempérature à tendance à réduire le taux d’ondulation du couple. Toutefois notons un pointintéressant, le tauxd’ondulationducouplededétentea légèrementaugmentépour lecasde laMSAP de référence lorsque la température augmente, en fait cela s’explique par le fait que leniveaud’inductionayantbaissédans l’entrefer, la saturationdesdentsestmoinsprononcée,cequisetraduitnaturellementparunentrefereffectifplusfaible.Lephénomènen’estpasobservépour lamachineMSAP2toutsimplementparceque l’entrefermécaniqueestplus importantet,par conséquent, le niveau de saturation des dents reste sensiblement identique lorsque latempérature augmente. Le niveau d’induction d’entrefer baissant, cela se traduit par unediminutiondutauxd’ondulationducouplededétente.

ANNEXED:InfluencedelatempératuresurlesperformancesexternesdelaMSAP
189
95°C
Position rotorique [° élec]
Coup
le [
kN
m]
95°C
Position rotorique [° élec]
Coup
le [
kN
m]
(a)MSAPderéférence (b)MSAP2
FigureD.6:Formesd’ondesducoupleà20°Cetà95°C
360
370
380
390
400
410
420
430
MSAP réf (20°C) MSAP réf (95°C) MSAP2 (20°C) MSAP2 (95 °C)
kN
m
FigureD.7:Couplemoyendesmachinesretenues
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
TOCT TOCD
%
MSAP référence MSAP2
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
TOCT TOCD
%
MSAP référence MSAP2
(a)à20°C (b)à95°C
FigureD.8:Tauxd’ondulationducouple
0
20
40
60
80
100
120
MSAP réf (20°C) MSAP réf (95°C) MSAP2 (20°C) MSAP2 (95 °C)
kW
Pertes Joule Pertes fer
FigureD.9:Principalespertesdesmachinesretenues
LespertesJouleétantlesmêmespourlesdeuxmachines,ladifférencerésideraprincipalement
dans les pertes fer à vide.En effet, comme on peut l’observer sur l’histogramme de la figure

ANNEXED:InfluencedelatempératuresurlesperformancesexternesdelaMSAP
190
(D.9),bienquel’onaitaugmentél’épanouissementdesaimants,l’augmentationdel’entreferàeuun effet de «compensation» atténuant l’augmentation de l’induction dans la culasse, ce qui setraduit par des pertes fer relativement moins importantes pour laMSAP2 (*4%). Par ailleurs,l’augmentationdelatempératureréduitnaturellementlespertesferde11%pourlaMSAP2etde11.8%pourlaMSAPderéférence,cequiestnormalcarl’inductionbaisse.
Habituellement,àcôtédelacontraintedelimitationdecourant,uneautrecontrainteestpriseencomptelorsdelavariationdevitessedesensemblesconvertisseurs*machinesélectriques.Eneffet, la tension d’induit par phase du moteur ne doit pas excéder la tension disponible sur
l’alimentation, en d’autres termes, Vuu qsdsˆ
2
322 ≤+ , V étant l’amplitude de la tension par
phasede l’alimentation.Ladéterminationdupointdefonctionnementpermettantdefournir lecouplenécessaireàcourantmaxesteffectuéeentenantcomptedecettecontraintesurlatension.
Cepointde fonctionnementest caractérisépar l’amplitudeducourantmaintenuà savaleurmaxetledéphasage γ entrelecourantdephasestatoriqueetlaFÉMàvide
Lafigure(D.10)montrel’évolutionducoupleenfonctionde γ etdelapositiondurotorpourlaMSAPderéférenceetlaMSAP2,àdeuxtempératuresdefonctionnement(20°Cet95°C).
Lesondulationsdecoupleaugmententavec γ atteignantunmaximumpuisdiminuentcommelemontrelafigure(D.11).Eneffet,pour γ nonnul,lacomposantedirecteducourant( dsi )estnon nulle et par conséquent un couple de saillance apparaît. Au fur et à mesure que l’ons’approchede 0=γ ,lacomposante dsi devientnégligeable,réduisantlacontributiondelapartiesaillanteducoupleetparlamêmeoccasion,desesondulations.
Lorsquelatempératureaugmente,nousavonsobservédanslespectreharmoniquedelaFÉM,l’augmentation de l’harmonique 7, tout naturellement cela à des conséquences sur le tauxd’ondulationducouplecommeonpeutaisémentl’observersurlafigure(D.11).
(a)MSAPderéférence (b)MSAP2
FigureD.10:Evolutionducoupleenfonctiondelapositionetde γ

ANNEXED:InfluencedelatempératuresurlesperformancesexternesdelaMSAP
191
FigureD.11:Tauxd’ondulationducoupleenfonctionde γ
Lafigure(D.12)représentel’évolutiondelatensiondephasedesdeuxmachinesàaimantsen
fonctiondel’angle γ , lesrésultatssontobtenuspourdeuxtempératuresdifférentes.Lespointsencercledanslafigure,indiquentlescasdedépassementdelatensiondephaseadmissible.
(a)MSAPderéférence (b)MSAP2
FigureD.12:Evolutiondelatensiondephase(valeurefficace)enfonctionde γ L’analysedesrésultatsmontrequelefonctionnementàcouplemaximumetàvitessenominale
se traduit par un dépassement de la tension admissible délivrée par le convertisseur (3000 Vefficace par phase). La nécessité de défluxer est évidente dans les deux cas de températureétudiés. Naturellement, comme cela est prévisible, la température affectant la FÉM à vide, latensionadmissibleestatteinteavecunangle γ plusfaible(envaleurabsolue)pour95°A.
Lepointdefonctionnementcorrespondantàuncouplevoisinde380kNmà170tr/mnetàtension n’excédant pas 3000V peut être déduit des résultats des courbes des figures (D.13),(D.14)et(D.15).Ondéduitnaturellementlefacteurdepuissanceetl’angle γ associé.
Le tableau (D.12) résume lesprincipalesperformancesenmodededéfluxagepour lesdeuxmachinesretenuesquel’onpeutrésumerainsi:
Les deux machines sont quasi identiques en termes de pertes. Bien que la MSAP2 soitdimensionnéedemanièreàavoiruntauxd’ondulationsducoupleplusfaible,cedernierestliéaupoint de fonctionnement de la machine. En effet, on remarque que pour le point defonctionnement permettant d’atteindre les performances en mode de défluxage, le tauxd’ondulations du couple de la MSAP2 est légèrement plus grand que celui de la MSAP de

ANNEXED:InfluencedelatempératuresurlesperformancesexternesdelaMSAP
192
référenceetce,àtempérature20°A.Toutefoislatendanceestinverséepourunetempératuredefonctionnementde95°A.
(a)MSAPderéférence (b)MSAP2FigureD.13:Evolutionducouplemoyenenfonctionde γ
(a)MSAPderéférence (b)MSAP2
FigureD.14:Evolutiondelatensiondephase(valeurefficace)enfonctiondufacteurdepuissance
(a)MSAPderéférence (b)MSAP2
FigureD.15:Evolutionducouplemoyenenfonctiondufacteurdepuissance

ANNEXED:InfluencedelatempératuresurlesperformancesexternesdelaMSAP
193
TableauD.2:PrincipalesperformancesdelaMSAPenmodedéfluxage
#D (!! (<Température(°C) 20 95 20 95
γ (°élec) 23.93 8,63 20.5 5.74
sφcos ≈1 0.95 0.995 0.935
emΓ (kNm) 381 382 381 376
phphE −ˆ (V) 7692.3 7123 7502.6 6197.1
effsV , (V) <3000 ≈3000 <3000 ≈3000
7h (%) 0.116 0.137 0.001 0.012
11h (%) 0.449 0.409 0.357 0.33
13h (%) 0.217 0.206 0.187 0.180
THD (%) 0.554 0.52 0.455 0.423TOCT (%) 1.25 1.32 1.31 1.21
jsP (kW) 70.5 91.65 70.5 91.65
ferP (kW) 24.7 21.776 23.61 21

!!2
Ce travail porte sur la modélisation et le dimensionnement des moteurs à aimantspermanents et asynchrones destinés à la propulsion marine par POD. Un état de l’art estprésenté,oùlesdifférentestopologiesdemoteurspourcetyped’applicationysontabordées.LaMachineàaimantspermanentsetlamachineasynchroneonétéretenuepournotreapplication.
Dans le cas de la machine à aimants permanents, une analyse par éléments finis esteffectuée pour dimensionner la machine à aimants permanents et minimiser les principauxharmoniquesdelaFÉM.Unmodèleélémentsfinis2Denmagnétostatiquecoupléàunmodèlecircuit est développé pour la prédiction des couples pulsatoires dues aux harmoniques duconvertisseur.
Encequiconcernelamachineasynchrone,Pourtenircomptedesharmoniquesd’espaceetévaluerleurspertes,unmodèleélectromagnétiqueutilisantlarésolutionparélémentsfinis2Denmagnétodynamiquecouplé àunmodèle circuit estdéveloppé.Par ailleurs, un autremodèlebasésurleprincipedecouplageélémentsfinis*circuitélectriqueestdéveloppépourtenircomptedesharmoniquesdetempsduvariateur,cemodèlepermetd’évalueràlafoislespertesduesauxharmoniquesdetemps,maisaussidescouplespulsatoires.
Danslaphasedevalidationetvérificationdesdifférentscalculs,nousavonsutilisél’outilFlux2Ddecalculparéléments finisqui tientcomptede la rotationdurotor (pasàpasdans letemps)eteffectuécertainesmesures(casdelamachineàaimantspermanents).Lesrésultatsdescalculs obtenus par les modèles développés concordent avec ceux obtenus par la méthodetemporelle(pasàpasdansletemps)etlesquelquesmesuresdontnousdisposons. !2Moteur à aimants permanents, moteur asynchrone, éléments finis, propulsion par POD,harmoniques d’espace, harmoniques de temps, couples pulsatoires, couples de détente,segmentationdesaimants,pertes.%2
This work concerns the modeling and the design of the permanent magnets and
asynchronousmotorsintendedforPODshippropulsion.Astateoftheartispresented,wherevarioustopologiesofmotorsdesignedforthisapplicationareapproachedthere.Thepermanentmagnetmotorandtheinductionmotorhavebeenchosenfortheapplication.
For the permanent magnets motor, a finite element analysis is adopted to design andminimize themainharmonics leading toaquasi sinusoidalbackEMF.A finite elementmodelcoupled to an electrical circuit allows to predict both current and torquewaveforms includingtimeharmonicsknowingthevoltagewaveformoftheinverter.
The inductionmotor is designed in such away to haveminimum losses andpulsatingtorque.Forthispurpose,a2Dcomplexfiniteelementmethodcoupledtoanelectricalcircuitisdeveloped.Inaddition,another2Dfiniteelement*electricalcircuitmodelisproposedtoevaluatetimeharmonicslossesandtoreconstitutethecurrentandtorquewaveforms.Thismodelallowstopredictthepulsatingtorques.
The validation and verification step is done by using a time stepping finite elementsoftware Flux2D and some available measurements (for the permanent magnets motor). Thecomparisonof the calculationsobtainedby thedifferentmethods and software, aswell as theavailablemeasurementsissatisfactory.X Y2Permanentmagnetsmotor,inductionmotor,finiteelement,PODpropulsion,spaceharmonics,timeharmonics,magnetsegmentation,pulsatingtorque,coggingtorque,losses.