Radially symmetric systems with a singularity and asymptotically
18
Radially symmetric systems with a singularity and asymptotically linear growth Alessandro Fonda and Rodica Toader Abstract. We prove the existence of infinitely many periodic solutions for radially symmetric systems with a singularity of repulsive type. The nonlinearity is assumed to have a linear growth at infinity, being con- trolled by two constants which have a precise interpretation in terms of the Dancer-Fuˇ cik spectrum. Our result generalizes an existence theo- rem by del Pino, Man´ asevich and Montero [6], obtained in the case of a scalar second order differential equation. 1 Introduction We consider a radially symmetric system in R N of the type ¨ x = -h(t, |x|) x |x| , (1) where h : R× ]0, +∞[ → R is continuous, T -periodic with respect to its first variable, and has a singularity of repulsive type at the origin in its second variable. We look for non-collision periodic solutions, i.e., solutions which never attain the singularity. As a first approach, one could look for periodic solutions whose orbits always stay on a given radius. Setting ρ(t)= |x(t)|, the study of these solutions involves the scalar equation ¨ ρ + h(t, ρ)=0 , (2) which has been first considered by Lazer and Solimini in [22] and later investi- gated by many authors, see, e.g., [1, 5, 6, 8, 10, 18, 19, 28, 29]. Roughly speak- ing, being the singularity of repulsive type, one can expect that T -periodic solutions exist, provided that the force is attractive at some distance from the origin. However, some care must be taken in order to avoid what seems to be a kind of resonance at infinity. This fact is put in evidence in the following result by Del Pino, Man´ asevich and Montero. 1
Transcript of Radially symmetric systems with a singularity and asymptotically

Radially symmetric systems with a singularityand asymptotically linear growth
Alessandro Fonda and Rodica Toader
Abstract. We prove the existence of infinitely many periodic solutionsfor radially symmetric systems with a singularity of repulsive type. Thenonlinearity is assumed to have a linear growth at infinity, being con-trolled by two constants which have a precise interpretation in terms ofthe Dancer-Fucik spectrum. Our result generalizes an existence theo-rem by del Pino, Manasevich and Montero [6], obtained in the case ofa scalar second order differential equation.
1 Introduction
We consider a radially symmetric system in RN of the type
x = −h(t, |x|) x
|x|, (1)
where h : R× ]0,+∞[→ R is continuous, T -periodic with respect to its firstvariable, and has a singularity of repulsive type at the origin in its secondvariable. We look for non-collision periodic solutions, i.e., solutions whichnever attain the singularity.
As a first approach, one could look for periodic solutions whose orbitsalways stay on a given radius. Setting ρ(t) = |x(t)|, the study of these solutionsinvolves the scalar equation
ρ+ h(t, ρ) = 0 , (2)
which has been first considered by Lazer and Solimini in [22] and later investi-gated by many authors, see, e.g., [1, 5, 6, 8, 10, 18, 19, 28, 29]. Roughly speak-ing, being the singularity of repulsive type, one can expect that T -periodicsolutions exist, provided that the force is attractive at some distance from theorigin. However, some care must be taken in order to avoid what seems to bea kind of resonance at infinity. This fact is put in evidence in the followingresult by Del Pino, Manasevich and Montero.
1

Theorem 1 ([6]) Let the following two assumptions hold.
(H1) There are an integer M and two constants α, β for which(Mπ
T
)2
< α ≤ lim infr→+∞
h(t, r)
r≤ lim sup
r→+∞
h(t, r)
r≤ β <
((M + 1)π
T
)2
,
uniformly for every t ∈ [0, T ];
(H2) there are positive constants c′, c′′, δ, and ν ≥ 1, such that
c′
rν≤ −h(t, r) ≤ c′′
rν, for every t ∈ [0, T ] and every r ∈ ]0, δ] .
Then, equation (2) has a T -periodic solution.
The result in [6] is somehow related to a paper by Fabry and Habets [7],where a periodic problem without singularities is treated. Indeed, in [7] anasymmetric oscillator is considered, assuming, roughly speaking, that the non-linearity at +∞ asymptotically lies between the asymptotes of two consecutivecurves of the Dancer-Fucik spectrum, cf. [17]. It is readily seen that the con-stants appearing in (H1) correspond to these asymptotes. The analogy betweenthese results can be explained, see, e.g., [10], by the fact that the singularityprovides for the solutions a similar behaviour as when a superlinear assumptionon the nonlinearity at −∞ is made. However, the methods of proof followed in[6] and [7] differ considerably, despite the fact they both use topological degreetheory.
Condition (H2) in Theorem 1 has been improved in [28, 29] at the expenseof assuming h(t, r) to be equal to f(r) + e(t), the sum of two continuousfunctions. It was then asked that
limr→0+
f(r) = −∞ ,
∫ 1
0
f(r) dr = −∞ . (3)
Such an assumption was already considered, e.g., in [22].
In the recent papers [11, 12, 13, 14, 15], exploiting the radial symmetry ofthe system, it has been possible to prove the existence of periodic solutions ofsystem (1) rotating around the origin, by a topological degree approach. Therepulsive case was treated in [12], for nonlinearities with sublinear growth atinfinity, and in [14], for those with superlinear growth. Since the solutions lieon a plane, the idea is to separate the radial and the angular component and,as a first step, to find T -periodic radial solutions, those for which the angularmomentum is equal to zero. Those solutions for the radial component are thenshown to survive when the angular momentum remains small enough, thusgiving rise to slowly rotating solutions which, as a rule, are almost periodic,and become periodic for some suitable choices of the angular momenta.
2

In this paper, we will deal with the intermediate case of a nonlinearity witha linearly controlled growth at infinity, like in Theorem 1. We will generalizethe result by Del Pino, Manasevich and Montero in two directions: first, byassuming only a one-sided inequality on the nonlinearity near the singularity,namely h(t, r) ≤ f(r), with f satisfying a condition like (3). And, as a conclu-sion, by proving, besides the existence of a T -periodic solution for the scalarequation (2), the existence of infinitely many periodic solutions for system (1),rotating around the origin, as well.
Let us state our main result.
Theorem 2 Let the following two assumptions hold.
(H1) There are an integer M and two constants α, β for which(Mπ
T
)2
< α ≤ lim infr→+∞
h(t, r)
r≤ lim sup
r→+∞
h(t, r)
r≤ β <
((M + 1)π
T
)2
,
uniformly for every t ∈ [0, T ];
(H2′) there are a positive constant δ and a continuous function f : ]0, δ] → Rsuch that
h(t, r) ≤ f(r) , for every t ∈ [0, T ] and every r ∈ ]0, δ] ,
and
limr→0+
f(r) = −∞ ,
∫ δ
0
f(r) dr = −∞ .
Then, equation (2) has a T -periodic solution, and there exists a k1 ≥ 1 suchthat, for every integer k ≥ k1, equation (1) has a periodic solution xk(t) withminimal period kT , which makes exactly one revolution around the origin inthe period time kT . Moreover, there is a constant R > 0 such that, for everyk ≥ k1
1
R< |xk(t)| < R , for every t ∈ R ,
and, if µk denotes the angular momentum associated to xk(t), then
limk→∞
µk = 0 .
In the proof of Theorem 2, we will exploit the general approach developedin our previous papers, adapting moreover the method by Fabry and Habetsto our situation. We thus also provide a different proof of the result by DelPino, Manasevich and Montero, which becomes a corollary of Theorem 2.In particular, in Section 3 we will prove a general lemma ensuring a controlon the solutions of the scalar differential equation (2) which, in the phaseplane, perform a given number of rotations. We think that this result has anindependent interest, and for this reason we have stated it in a more generalframework.
Concerning systems with repulsive singularities having no radial symmetry,existence results were obtained, e.g., in [3, 4, 9, 16, 20, 21, 25, 26, 27]. See alsothe recent monograph [23], and the references therein.
3

2 The main result
We look for periodic solutions of the system
x = −h(t, |x|) x
|x|. (4)
The function h : R× ]0,+∞[→ R, instead of being continuous, can moregenerally be assumed to be L∞-Caratheodory, and T -periodic with respect tothe first variable, i.e.,
- h(·, r) is measurable and T -periodic, for every r > 0 ;
- h(t, ·) is continuous, for almost every t ∈ ]0, T [ ;
- for every compact interval I in ]0,+∞[ , there exists a constant cI ∈ Rsuch that
r ∈ I ⇒ |h(t, r)| ≤ cI , for a.e. t ∈ ]0, T [ .
Accordingly, the assumptions in (H1) and (H2′) are meant to be satisfied foralmost every t ∈ [0, T ].
We look for solutions x(t) ∈ RN which never attain the singularity, in thesense that
x(t) 6= 0 , for every t ∈ R . (5)
Since system (4) is radially symmetric, the orbit of a solution always lies ona plane, so we will assume, without loss of generality, that N = 2 (cf. [11,Appendix A]).
We may write the solutions of (4) in polar coordinates:
x(t) = ρ(t)(cosϕ(t), sinϕ(t)) , (6)
and (5) is satisfied if ρ(t) > 0, for every t. Equation (4) is then equivalent tothe system
(S)
ρ− µ2
ρ3+ h(t, ρ) = 0 ,
ρ2ϕ = µ ,
where µ is the (scalar) angular momentum of x(t). Recall that µ is constant intime along any solution. In the following, when considering a solution of (S),we will always implicitly assume that ρ > 0.
We consider µ ≥ 0 as a parameter, and, by the use of degree theory, wewill prove the existence of a T -periodic solution ρ of the first equation in (S).We thus deal now with the problem
(Pµ)
ρ− µ2
ρ3+ h(t, ρ) = 0 ,
ρ(0) = ρ(T ) , ρ(0) = ρ(T ) .
4

Let X be a Banach space of functions, such that
C1([0, T ]) ⊆ X ⊆ C([0, T ]) ,
with continuous immersions, and set
X+ = ρ ∈ X : min ρ > 0 .
Define the linear operator
L : D(L) ⊂ X → L1(0, T ) ,
D(L) = ρ ∈ W 2,1(0, T ) : ρ(0) = ρ(T ) , ρ(0) = ρ(T ) ,Lρ = ρ ,
and the Nemytzkii operator
Nµ : X+ → L1(0, T ) ,
(Nµρ)(t) =µ2
ρ3(t)− h(t, ρ(t)) .
Problem (Pµ) is then equivalent to
Lρ = Nµρ . (7)
Taking σ ∈ R not belonging to the spectrum of L, we have that (7) can betranslated to the fixed point problem
ρ = (L− σI)−1(Nµ − σI)ρ .
We will say that a set Ω ⊆ X is uniformly positively bounded below if there isa constant δ > 0 such that min ρ ≥ δ for every ρ ∈ Ω.
The following theorem has been proved in [13]. It provides a general degreeassumption, only at µ = 0, which automatically implies, for every µ > 0 suffi-ciently small, the solvability of (S), with ρ(t) a T -periodic function. Moreover,corresponding to an appropriate choice of µ, the function ϕ(t) will satisfy theequality ϕ(t+kT ) = ϕ(t)+2π, for a sufficiently large integer k, thus providinga solution of (1) which rotates exactly once around the origin in the periodtime kT .
Theorem 3 Let Ω be an open bounded subset of X, uniformly positively boun-ded below. Assume that there is no solution of (7), with µ = 0, on the boundary∂Ω, and that
deg(I − (L− σI)−1(N0 − σI),Ω) 6= 0 . (8)
Then, there exists a k1 ≥ 1 such that, for every integer k ≥ k1, system (4)has a periodic solution xk(t) with minimal period kT , which makes exactly onerevolution around the origin in the period time kT . The function |xk(t)| is T -periodic and, when restricted to [0, T ], it belongs to Ω. Moreover, if µk denotesthe angular momentum associated to xk(t), then
limk→∞
µk = 0 .
5

In order to apply the above theorem, we consider the case µ = 0 and study,for λ ∈ [0, 1], the problem
ρ+ g(t, ρ;λ) = 0 ,
ρ(0) = ρ(T ) , ρ(0) = ρ(T ) ,(9)
where
g(t, r;λ) = (1− λ)
(−1
r+((M + 1
2)π
T
)2
r
)+ λh(t, r) .
Notice that g(t, r; 1) = h(t, r). We choose X = C1([0, T ]) and define, forR > 1, the open set
ΩR =ρ ∈ X :
1
R< ρ(t) < R and |ρ(t)| < R , for every t ∈ [0, T ]
.
Clearly, ΩR is bounded, and uniformly positively bounded below. The impor-tant point to be proved is the following.
Proposition 1 There is an R > 1 such that, for any λ ∈ [0, 1], all the solu-tions of problem (9) belong to ΩR .
Assuming that Proposition 1 has been proved, and such an R > 1 has beendetermined, we have that, when considering the Nemytzkii operator
Nλ : X+ → L1(0, T ) ,
(Nλρ)(t) = g(t, ρ(t);λ) ,
the degree deg(I − (L− σI)−1(Nλ − σI),ΩR) is independent of λ ∈ [0, 1]. Letus compute it for λ = 0. Writing the differential equation as the equivalentsystem u = v
v =1
u−((M + 1
2)π
T
)2
u ,
and defining the function
F :[ 1
R,R]× [−R,R]→ R2 ,
F (u, v) =
(v ,
1
u−((M + 1
2)π
T
)2
u
),
we apply a result of Capietto, Mawhin and Zanolin [2, Theorem 1]: the Leray-Schauder degree of I − (L − σI)−1(N0 − σI) is equal to the Brouwer degreeof F :
dLS(I − (L− σI)−1(N0 − σI),ΩR) = dB
(F,] 1
R,R[× ]−R,R[
).
The function F has a unique zero (u0, v0), necessarily belonging to the set] 1R, R[× ]−R,R[ , as u0 = T/(M+ 1
2)π is a constant solution of (9) with λ = 0,
and v0 = 0. Since an explicit computation shows that the Jacobian matrixJF (u0, v0) has a positive determinant, the degree has to be equal to 1. BeingN1 = N0, we conclude that deg(I − (L− σI)−1(N0− σI),ΩR) = 1, so that (8)is satisfied, and Theorem 3 applies, thus providing a proof of Theorem 2.
6

So, it remains to prove Proposition 1. To this aim, we need a preliminarylemma, to which the following section is devoted.
3 A preliminary lemma
In this section, we consider the general equation
ρ+ g(t, ρ;λ) = 0 , (10)
where g : R× ]a, b[×[0, 1] → R, with −∞ ≤ a < b ≤ +∞, is a L∞-Caratheo-dory function, uniformly in λ ∈ [0, 1], and T -periodic in its first variable, i.e.,
- g(·, r;λ) is measurable and T -periodic, for every (r, λ) ∈ ]a, b[×[0, 1];
- g(t, · ;λ) is continuous, for a.e. t ∈ R and every λ ∈ [0, 1];
- for every compact interval [a, b], contained in ]a, b[ , there is a constant csuch that
|g(t, r;λ)| ≤ c , for a.e. t ∈ R and every (r, λ) ∈ [a, b]× [0, 1] ;
Moreover, we assume that there exist two constants a, b, with a < a < b < b,and two continuous functions g1 : ]a, a]→ R, g2 : [b, b[→ R such that
g(t, r;λ) ≤ g1(r) < 0 , for a.e. t ∈ R, every r ∈ ]a, a] and λ ∈ [0, 1] ,g(t, r;λ) ≥ g2(r) > 0 , for a.e. t ∈ R, every r ∈ [b, b[ and λ ∈ [0, 1] ,
(11)
and, if G1 and G2 are primitives of g1, and g2, respectively, then
limr→a+
G1(r) = +∞ , limr→b−
G2(r) = +∞ . (12)
In the phase plane, writing the equivalent systemu = vv = −g(t, u;λ) ,
(13)
we work in the setS = (u, v) ∈ R2 : a < u < b ,
and we introduce the function N : S → R, defined by
N (u, v) =
(u2 + v2)12 if a = −∞ , b = +∞ ,(
1
(u− a)2+ u2 + v2
) 12
if a > −∞ , b = +∞ ,(1
(b− u)2+ u2 + v2
) 12
if a = −∞ , b < +∞ ,(1
(u− a)2+
1
(b− u)2+ v2
) 12
if a > −∞ , b < +∞ .
7

Lemma 1 In the above setting, let r ∈ ]a, b[ be given and fix a positive inte-ger n. Then, for every R1 > N (r, 0) there is a R2 > R1 such that, for everyλ ∈ [0, 1], if ρ(t) is a solution of (10), and t1 < t2 are such that
N (ρ(t1), ρ(t1)) = R1 , N (ρ(t2), ρ(t2)) = R2 ,
andR1 < N (ρ(t), ρ(t)) < R2 , for every t ∈ ]t1, t2[ ,
then (ρ(t), ρ(t)) makes at least n clockwise rotations around the point (r, 0) inthe time interval [t1, t2].
Proof First of all, notice that it is not restrictive to assume that the strictinequalities hold in (11), taking if necessary 1
2g1 and 1
2g2 instead of g1 and g2,
respectively, so that (12) is still satisfied. We begin by defining two continuousfunctions g1, g2 : ]a, b[→ R such that
g2(r) < g(t, r;λ) < g1(r) , for a.e. t ∈ [0, T ] , and every (r, λ) ∈ ]a, b[×[0, 1] ,
and, if G1 and G2 are primitives of g1, and g2, respectively, then
limr→a+
G1(r) = limr→b−
G1(r) = +∞ , limr→a+
G2(r) = limr→b−
G2(r) = +∞ . (14)
In order to define g1, let (bn)n be a strictly increasing sequence such that b0 = a,b1 = b, and limn bn = b. Let, for every n ≥ 1,
cn = ess supg(t, r;λ) : t ∈ [0, T ], r ∈ [a, bn], λ ∈ [0, 1]+ 1 .
Fix a ∈ ]a, a[ and set
g1(r) =
g1(r) if r ≤ a ,
maxc1 − g(a)
b0 − a(r − a) + g1(a) , g1(r)
if a < r ≤ b0 ,
cn+2 − cn+1
bn+1 − bn(r − bn) + cn+1 if bn < r ≤ bn+1 .
Notice that g1 is piecewise linear on [a, b[ , and g1(bn) = cn+1 for every n ∈ N.It is easy to see that g1 fulfills the above requirements. The function g2 isdefined analogously.
We now construct a curve Γ which will control the evolution of the solutionsof (10) in the phase-plane. Let
V1(u, v) = 12v2 + G1(u) , V2(u, v) = 1
2v2 + G2(u) .
Set D1 = maxG2(u) : u ∈ [a, b]+ 1 and define the line
L1 = (u, v) ∈ S : V2(u, v) = D1 , v ≥ 0 .
8

Notice that L1 is the graph of the function F1(u) =√
2(D1 − G2(u)) . By (14),
there are u−1 , u+1 , with a < u−1 < a < b < u+
1 < b, such that
F1(u−1 ) = F1(u
+1 ) = 0 , and F1(u) > 0 for every u ∈ ]u−1 , u
+1 [ .
Remark that, if ρ(·) is a solution of (10) and w(τ) = (ρ(τ), ρ(τ)) belongs toL1, for some τ , and ρ(τ) > 0, then
d
dtV2(w(τ)) = ∇V2(w(τ)) · w(τ)
= (g2(ρ(τ)), ρ(τ)) · (ρ(t), ρ(τ))
= ρ(τ)(g2(ρ(τ))− g(τ, ρ(τ);λ)) < 0 ,
thus showing that, roughly speaking, in the phase-plane, the solution cannotcross the line L1 from the inside to the outside. More precisely, if ρ(·) is asolution of (10) and V2(ρ(τ), ρ(τ)) = D1 , for some τ , with ρ(τ) > 0, thenthere is a δ > 0 such that V2(ρ(t), ρ(t)) > D1 for every t ∈ ]τ − δ, τ [ andV2(ρ(t), ρ(t)) < D1 for every t ∈ ]τ, τ + δ[ .
Set now D2 = maxG1(u) : u ∈ [u−1 , u+1 ]+ 1 and define the line
L2 = (u, v) ∈ S : V1(u, v) = D2 , v ≤ 0 .
Notice that L2 is the graph of the function F2(u) = −√
2(D2 − G1(u)) .
By (14), there are u−2 , u+2 , with a < u−2 < u−1 < u+
1 < u+2 < b, such that
F2(u−2 ) = F2(u
+2 ) = 0 , and F2(u) < 0 for every u ∈ ]u−2 , u
+2 [ .
A computation similar to the above shows that the solutions of (10) cannotcross the line L2 , in the phase-plane, from the inside to the outside: if ρ(·) isa solution of (10) and V1(ρ(τ), ρ(τ)) = D2 , for some τ , with ρ(τ) < 0, thenthere is a δ > 0 such that V1(ρ(t), ρ(t)) > D2 for every t ∈ ]τ − δ, τ [ andV1(ρ(t), ρ(t)) < D2 for every t ∈ ]τ, τ + δ[ .
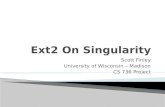
We will now show how to pass from L1 to L2 in order to obtain a clockwiserotating path which cannot be crossed by the solutions from the inside to theoutside. Following an idea introduced in [24], we consider the straight line R1
passing through the point (12(u+
1 + u+2 ), 0) with a sufficiently small negative
slope m1 (see Figure 1).
Let P (1) = (p(1)1 , p
(1)2 ) be the first point where the lineR1 meets L1, starting
from (12(u+
1 +u+2 ), 0), and similarly, let P (2) = (p
(2)1 , p
(2)2 ) be the first point where
R1 meets L2. If m1 is sufficiently small, such points exist and, by continuity,they are arbitrarily close to (u+
1 , 0) and (u+2 , 0), respectively. In particular, we
may assume that p(1)1 ≥ b, and −1 ≤ p
(2)2 < p
(1)2 ≤ 1. Setting
ν1 = ming2(r) : r ∈ [b, u+2 ] ,
9

Figure 1: The connection between L1 and L2
we have
g(t, r;λ) ≥ ν1 > 0 , for a.e. t ∈ R , every r ∈ [b, u+2 ] and λ ∈ [0, 1] .
Hence, if ρ(·) is a solution of (10) such that w(τ) = (ρ(τ), ρ(τ)) belongs tothe segment joining P (1) and P (2), for some τ , with |ρ(τ)| ≤ 1, and, moreover,|m1| < ν1, we get
(−m1, 1) · w(τ) = −m1ρ(τ)− g(τ, ρ(τ);λ) ≤ |m1| − ν1 < 0 .
Therefore, the solutions cannot cross the segment from the inner region to theouter one: if ρ(·) is a solution of (10) and ρ(τ) = m1(ρ(τ) − 1
2(u+
1 + u+2 )), for
some τ , with |ρ(τ)| ≤ 1, there is a δ > 0 such that ρ(t) > m1(ρ(t)− 12(u+
1 +u+2 ))
for every t ∈ ]τ − δ, τ [ and ρ(t) < m1(ρ(t)− 12(u+
1 +u+2 )) for every t ∈ ]τ, τ + δ[ .
Continuing this construction, we set nowD3 = maxG2(u) : u ∈ [u−2 , u+2 ]+
1, and define the line
L3 = (u, v) ∈ S : V2(u, v) = D3 , v ≥ 0 ,
which is the graph of the function F3(u) =√
2(D3 − G2(u)) . Again by (14),
there are u−3 , u+3 , with a < u−3 < u−2 < u+
2 < u+3 < b, such that
F3(u−3 ) = F3(u
+3 ) = 0 , and F3(u) > 0 for every u ∈ ]u−3 , u
+3 [ .
As above, one can see that the solutions of (10) cannot cross the line L3, inthe phase-plane, from the inside to the outside (in the above sense).
We now consider the straight line R2 passing through the point (12(u−2 +
u−3 ), 0) with a sufficiently small negative slope m2. Let P (3) = (p(3)1 , p
(3)2 ) be
the first point where the line R2 meets L2, starting from (12(u−2 + u−3 ), 0), and
10

Figure 2: The curve Γ
let P (4) = (p(4)1 , p
(4)2 ) be the first point where R2 meets L3. If m2 is sufficiently
small, such points exist and, by continuity, they are arbitrarily close to (u−2 , 0)
and (u−3 , 0), respectively. In particular, we may assume that p(3)1 ≤ u−1 , and
−1 ≤ p(3)2 < p
(4)2 ≤ 1. Setting
ν2 = maxg1(r) : r ∈ [u−3 , u−1 ] ,
we have
g(t, r;λ) ≤ ν2 < 0 , for a.e. t ∈ R , every r ∈ [u−3 , u−1 ] and λ ∈ [0, 1] .
Hence, if ρ(·) is a solution of (10) such that w(τ) = (ρ(τ), ρ(τ)) belongs tothe segment joining P (3) and P (4), for some τ , with |ρ(τ)| ≤ 1, and, moreover,|m2| < |ν2|, we get
(−m2, 1) · w(τ) = −m2ρ(τ)− g(τ, ρ(τ);λ) ≥ −|m2| − ν2 > 0 .
Hence, again the solutions cannot cross the segment from the inner region tothe outer one: if ρ(·) is a solution of (10) and ρ(τ) = m2(ρ(τ)− 1
2(u−2 +u−3 )), for
some τ , with |ρ(τ)| ≤ 1, there is a δ > 0 such that ρ(t) < m2(ρ(t)− 12(u−2 +u−3 ))
for every t ∈ ]τ − δ, τ [ and ρ(t) > m2(ρ(t)− 12(u−2 +u−3 )) for every t ∈ ]τ, τ + δ[ .
The curve Γ is thus constructed (see Figure 2): it starts following L1 inclockwise direction till the point P (1) is reached; then, it continues along thesegment from P (1) to P (2); from there, it follows L2 till reaching the point P (3);then, it coincides with the segment from P (3) to P (4); once arrived there, itstarts again along L3, and so on, recursively.
11

We parametrize the curve Γ by a continuous function γ : [0,+∞[→ R2.Notice that, by construction, for every compact set K contained in ]a, b[×Rthere is a sK ≥ 0 such that γ(s) 6∈ K for every s > sK.
Let R1 > N (r, 0) be given. Let s1 ≥ 0 be such that N (γ(s)) > R1, forevery s ≥ s1. There is a s2 > s1 such that γ(s) makes exactly n+ 1 rotationsaround (r, 0) as s varies from s1 to s2. We take R2 > R1 in such a way thatN (γ(s)) < R2 for every s ∈ [s1, s2].
Let ρ(t) be a solution of (10), and let t1 < t2 be such that N (ρ(t1), ρ(t1)) =R1, N (ρ(t2), ρ(t2)) = R2 , and R1 < N (ρ(t), ρ(t)) < R2 for every t ∈ ]t1, t2[ .By construction, (ρ(t), ρ(t)) cannot cross the curve Γ from the inside to theoutside. Moreover, looking at the equivalent system (13), since u(t) has to bepositive in the upper half-plane and negative in the lower half-plane, we seethat (ρ(t), ρ(t)) can never rotate around (r, 0) in counter-clockwise direction,not even once. Therefore, it has to make at least n clockwise rotations aroundthe point (r, 0) in the time interval [t1, t2]. The proof is thus completed.
4 Proof of Proposition 1
In this final section, we provide a proof of Proposition 1 which, as shown inSection 2, will complete the proof of Theorem 2. In the following lemma, weestimate the time needed for a large amplitude solution to perform, in thephase plane, a complete rotation around the point (r, 0). For simplicity, wewill assume the starting point to be on the horizontal axis.
Lemma 2 There is a R1 > N (r, 0) such that, if ρ(t) is a solution of thedifferential equation in (9) and τ1 < τ2 are such that (ρ(t), ρ(t)) makes exactlyone rotation around (r, 0) as t varies in [τ1, τ2], with ρ(τ1) > r, ρ(τ1) = 0, and
N (ρ(t), ρ(t)) ≥ R1 , for every t ∈ [τ1, τ2] ,
thenT
M + 1< τ2 − τ1 <
T
M.
Proof We need to estimate the time spent by the solution in different regionsof the plane. Without loss of generality, let us assume that r = 1. We startby noticing that assumption (H1) implies the existence of three real numbersα1, β1 and d, with(Mπ
T
)2
< α1 < α , β < β1 <((M + 1)π
T
)2
, d > 1 ,
such that, for every λ ∈ [0, 1],
r ≥ d ⇒ α1(r − 1) ≤ g(t, r;λ) ≤ β1(r − 1) .
12

Taking R1 sufficiently large, we may assume that ρ(τ1) > d. Set t0 = τ1,and let t1 > t0 be the first instant when ρ(t1) = d (see Figure 3). We wantto estimate the time t1 − t0. Writing the differential equation in (9) as theequivalent system (13), and passing to polar coordinates
u = 1 + ξ cos θ , v = ξ sin θ ,
we have that
−θ(t) =u(t)v(t)− v(t)(u(t)− 1)
(u(t)− 1)2 + v2(t)=v2(t) + g(t, u(t);λ)(u(t)− 1)
(u(t)− 1)2 + v2(t). (15)
So, if t ∈ [t0, t1],
v2(t) + α1(u(t)− 1)2
(u(t)− 1)2 + v2(t)≤ −θ(t) ≤ v2(t) + β1(u(t)− 1)2
(u(t)− 1)2 + v2(t),
i.e.,−θ(t)
sin2 θ(t) + β1 cos2 θ(t)≤ 1 ≤ −θ(t)
sin2 θ(t) + α1 cos2 θ(t).
Since, for any ω > 0,∫dθ
sin2 θ + ω cos2 θ=
1√ω
arctan
(tan θ√ω
)+ c ,
integrating, we have
1√β1
[arctan
( 1√β1
tan θ(t))]t0
t1
≤ t1 − t0 ≤1√α1
[arctan
( 1√α1
tan θ(t))]t0
t1
.
Let us define
η = min
π
2√β1
− T
2(M + 1),T
M− π√α1
.
Taking R1 sufficiently large, since θ(t0) = 0 and θ(t1) is near −π2
, we thus have
T
2(M + 1)<
π
2√β1
− η
2< t1 − t0 <
π
2√α1
<T
2M.
Using assumption (H2′), let d′ ∈ ]0, 1[ be such that, for every λ ∈ [0, 1],
r ∈ ]0, d′] ⇒ g(t, r;λ) ≤ −(3π
η
)2
.
Following the solution, there is a first instant t2 > t1 in which ρ(t2) = d′. Lett3 > t2 be such that ρ(t3) = d′ again, and ρ(t) < d′ for every t ∈ ]t2, t3[ (seeFigure 3). Then, if t ∈ ]t2, t3[ , using (15),
−θ(t) ≥v2(t) + (3π
η)2(1− u(t))
(u(t)− 1)2 + v2(t)≥v2(t) + (3π
η)2(1− u(t))2
(u(t)− 1)2 + v2(t),
13

Figure 3: Computing the time needed for a rotation
so that
−θ(t) ≥ sin2 θ(t) +(3π
η
)2
cos2 θ(t) ,
i.e.,
1 ≤ −θ(t)sin2 θ(t) + (3π
η)2 cos2 θ(t)
.
Integrating, we get
t3 − t2 ≤η
3π
[arctan
( η2π
tan θ(t))]t2
t3≤ η
3.
Using the Caratheodory conditions, let C > 0 be such that, for every almostevery t ∈ [0, T ], every r ∈ [d′, d] and λ ∈ [0, 1],
|g(t, r;λ)| ≤ C .
Then, if t ∈ ]t1, t2[ , using (15),
−θ(t) ≥ v2(t)− C|1− u(t)|(u(t)− 1)2 + v2(t)
≥ v2(t)− C(d− d′)(d− d′)2 + v2(t)
.
14

Therefore, if R1 is sufficiently large, since we are considering u(t) in thebounded interval [d′, d], it will be that |v(t)| is so large that −θ(t) ≥ 1
2, for ev-
ery t ∈ ]t1, t2[ , and the total angle θ(t1)− θ(t2) is smaller than η6. By Lagrange
Theorem, for some ξ ∈ ]t1, t2[ ,
t2 − t1 =1
−θ(ξ)(θ(t1)− θ(t2)) < 2
η
6=η
3.
If we now continue following the solution, there will be a first instant t4 > t3such that ρ(t4) = d (see Figure 3 again). As for the estimate of t2 − t1, in thesame way we can prove that
t4 − t3 <η
3.
Finally, there is a first instant t5 > t4 for which ρ(t5)=0. Clearly, t5 = τ2. Ina similar way as for the estimate of t1 − t0, we can prove that
T
2(M + 1)< t5 − t4 <
π
2√α1
.
We therefore conclude that
t5 − t0 =5∑j=1
(tj − tj−1) < 2π
2√α1
+ 3η
3≤ T
M,
and
t5 − t0 > (t1 − t0) + (t5 − t4) > 2T
2(M + 1)=
T
M + 1.
We now conclude the proof of Proposition 1. Let R1 > 0 be given byLemma 2. Notice that the assumptions of Lemma 1 are satisfied if we choosea = 0, b = +∞, the function g1 equal to the function f introduced in assump-tion (H2′), and g2(r) = (Mπ
T)2(r − 1). Choose n = M + 1 and let R2 > R1
be given by Lemma 1. We will show that all the solutions ρ(t) of (9) have tosatisfy
N (ρ(t), ρ(t)) < R2 , for every t ∈ [0, T ] .
Indeed, assume by contradiction that there is a t for which N (ρ(t), ρ(t)) ≥ R2.By Lemma 2, it cannot be that N (ρ(t), ρ(t)) ≥ R1, for every t ∈ [0, T ], since,in the period time T , the solution could not perform an integer number ofrotations around (r, 0). Hence, by the T -periodicity of the solution, theremust exist t1 < t2, with t2 − t1 < T , such that
N (ρ(t1), ρ(t1)) = R1 , N (ρ(t2), ρ(t2)) = R2 ,
andR1 < N (ρ(t), ρ(t)) < R2 , for every t ∈ ]t1, t2[ .
15

By Lemma 1, (ρ(t), ρ(t)) makes at least n = M + 1 clockwise rotations aroundthe point (r, 0) in the time interval [t1, t2]. By Lemma 2,
t2 − t1 > nT
M + 1= T ,
a contradiction. Choosing any R ≥ R2, since
N (u, v) < R2 ⇒ 1
R< u < R and |v| < R ,
we have that all the solutions of (9) belong to ΩR , and the proof of Proposi-tion 1 is thus completed.
References
[1] D. Bonheure and C. De Coster, Forced singular oscillators and the methodof lower and upper solutions, Topol. Meth. Nonlin. Anal. 22 (2003), 297–317.
[2] A. Capietto, J. Mawhin and F. Zanolin, A continuation approach to su-perlinear periodic boundary value problems, J. Differential Equations 88(1990), 347–395.
[3] J. Chu and D. Franco, Non-collision periodic solutions of second ordersingular dynamical systems, J. Math. Anal. Appl. 344 (2008), 898–905.
[4] V. Coti-Zelati, Dynamical systems with effective-like potential, NonlinearAnal. 12 (1988), 209–222.
[5] M. Del Pino and R. Manasevich, Infinitely many T -periodic solutions fora problem arising in nonlinear elasticity, J. Differential Equations 103(1993), 260–277.
[6] M. Del Pino, R. Manasevich and A. Montero, T -periodic solutions forsome second order differential equations with singularities, Proc. RoyalSoc. Edinburgh, 120A (1992), 231–243.
[7] C. Fabry and P. Habets, Periodic solutions of second order differentialequations with superlinear asymmetric nonlinearities, Arch. Math. 60(1993), 266–276.
[8] A. Fonda, Periodic solutions of scalar second order differential equationswith a singularity, Memoires de la classe des sciences, Academie Royalede Belgique, 8-IV, 1993.
[9] A. Fonda, Periodic solutions for a conservative system of differential equa-tions with a singularity of repulsive type, Nonlinear Anal. 24 (1995), 667–676.
16

[10] A. Fonda, R. Manasevich and F. Zanolin, Subharmonic solutions forsome second-order differential equations with singularities, SIAM J. Math.Anal. 24 (1993), 1294–1311.
[11] A. Fonda and R. Toader, Periodic orbits of radially symmetric Keplerian-like systems: a topological degree approach, J. Differential Equations 244(2008), 3235–3264.
[12] A. Fonda and R. Toader, Periodic orbits of radially symmetric systemswith a singularity: the repulsive case, preprint, available on-line atwww.dmi.units.it/pubblicazioni/Quaderni−Matematici/592−2009.pdf
[13] A. Fonda and R. Toader, Periodic solutions of radially symmetric pertur-bations of Newtonian systems, preprint, available on-line atwww.dmi.units.it/pubblicazioni/Quaderni−Matematici/598−2009.pdf
[14] A. Fonda, R. Toader and F. Zanolin, Periodic solutions of singular radiallysymmetric systems with superlinear growth, preprint, available on-line atwww.dmi.units.it/pubblicazioni/Quaderni−Matematici/604−2010.pdf
[15] A. Fonda and A. Urena, Periodic, subharmonic, and quasi-periodic oscil-lations under the action of a central force, Discrete Cont. Dynam. Syst.29 (2011), 169–192.
[16] D. Franco and P. J. Torres, Periodic solutions of singular systems withoutthe strong force condition, Proc. Amer. Math. Soc. 136 (2008), 1229–1236.
[17] S. Fucık, Solvability of Nonlinear Equations and Boundary Value Prob-lems, Reidel, Boston, 1980.
[18] S. Gaete and R. Manasevich, Existence of a pair of periodic solutions ofan O.D.E. generalizing a problem in nonlinear elasticity via variationalmethods, J. Math. Anal. Appl. 123 (1988), 257–271.
[19] P. Habets and L. Sanchez, Periodic solutions of some Lienard equationswith singularities, Proc. Amer. Math. Soc. 109 (1990), 1035–1044.
[20] P. Habets and L. Sanchez, Periodic solutions of dissipative dynamicalsystems with singular potentials, Differential Integral Equations 3 (1990),1139–1149.
[21] R. Hakl and P. J. Torres, On periodic solutions of second order differentialequations with attractive-repulsive singularities, J. Differential Equations248 (2010), 111–126.
[22] A. C. Lazer and S. Solimini, On periodic solutions of nonlinear differentialequations with singularities, Proc. Amer. Math. Soc. 99 (1987), 109–114.
[23] I. Rachu
nkova, S. Stanek, and M. Tvrdy, Solvability of Nonlinear SingularProblems for Ordinary Differential Equations, Hindawi, New York, 2008.
17

[24] A. Sfecci, Soluzioni periodiche per sistemi di equazioni differenziali nelpiano, Laurea Thesis, Trieste, 2009.
[25] S. Solimini, On forced dynamical systems with a singularity of repulsivetype, Nonlinear Anal. 14 (1990), 489–500.
[26] P. J. Torres, Non-collision periodic solutions of forced dynamical systemswith weak singularities. Discrete Contin. Dyn. Syst. 11 (2004), 693–698.
[27] P. J. Torres, Weak singularities may help periodic solutions to exist, J.Differential Equations 232 (2007), 277–284.
[28] Z. Wang, Periodic solutions of the second-order differential equations withsingularity, Nonlinear Anal. 58 (2004), 319–331.
[29] J. Xia and Z. Wang, Existence and multiplicity of periodic solutions forthe Duffing equation with singularity, Proc. Royal Soc. Edinburgh, 137A(2007), 1–21.
Authors’ addresses:
Alessandro FondaDipartimento di Matematica e InformaticaUniversita di TriesteP.le Europa 1I-34127 TriesteItalye-mail: [email protected]
Rodica ToaderDipartimento di Ingegneria Civile e ArchitetturaUniversita di UdineVia delle Scienze 208I-33100 UdineItalye-mail: [email protected]
Mathematics Subject Classification: 34C25
Keywords: periodic solutions, systems with singularity, nonlinear dynamics.
18