
Joshua Tells About 1 Sam. Tells About Ruth Tells About Judges Tells About.

Motion Review 1-D Formulas: time t ≥ 0 Position Function: r(t) Tells you the location of a moving object
Velocity Function: v(t) = drdt
Tells you how fast the object is moving AND Tells you the direction in which the object is moving
Speed Function: v(t) Tells you only how fast the object is moving
Acceleration Function: a(t) =dvdt
= d2rdt 2
Tells you how fast the velocity is changing AND Tells you if the velocity is increasing or decreasing Example: Position Function: r(t) = t 2 − 4t − 3 Velocity Function: v(t) = Speed Function: v(t) = Acceleration Function: a(t) = When t = 1:

2-D Formulas: time t ≥ 0 Position Function:
r (t) = x(t), y(t) Tells you the location of a moving object Velocity Function:
v(t) Tells you how fast the object is moving AND
Tells you the direction in which the object is moving Speed Function:
v(t) Tells you only how fast the object is moving Acceleration Function:
a(t) Has both magnitude and direction What do they tell you? Example:
r (t) = x(t), y(t) = t 2 ,2t Tells you the location of an object moving on the path described by the parametric equations: x(t) = t 2
y(t) = 2t
What is the path?

Vector-Valued Functions Review Real(scalar)-Valued Functions: f (t) Domain (input) Range (output) Example: f (t) = t 2 Plot: f (3) = Vector-Valued Functions:
r (t) = x(t), y(t) Domain (input) Range (output) Example:
r (t) = t 2 ,2t Plot:
r (3) =

Calculus Derivatives Review Real-Valued Functions:
Definition: ′f (t) = df
dt= limt→0
ft
= limt→0
f (t +t)− f (t)t
What does it mean? Instantaneous rate of change of output f (t) with respect to input t . How do you use it? Find the slope of the line tangent to the curve at the point (t, f (t)). How do you find it? Use the derivative rules whenever possible Example:
f (t) = t 2
′f (t) =′f (3) =

Vector-Valued Functions:
Definition:
′r (t) = drdt
= limt→0
rt
= limt→0
r (t +t)− r (t)t
What does it mean? Instantaneous rate of change of output
r (t) with respect to input t . How do you use it? How do you find it?
r (t) = x(t), y(t) ⇒ ′r (t) = ′x (t), ′y (t) Example:
r (t) = t 2 ,2t′r (t) =′r (3) =

Integrals Review Real-Valued Functions: Indefinite Integrals: f (t)dt = F(t)+C where ′F (t) = f (t)∫
Definite Integrals: f (t)dta
b
∫ = F(b)− F(a) How do you find it? Use the antiderivative rules and the Fundamental Theorem of Calculus Example:
f (t) = t 2
t 2dt =∫
t 2dt1
2
∫ =

Vector-Valued Functions: Indefinite Integrals:
r (t)dt∫ = x(t), y(t) dt∫ = x(t)dt, y(t)dt∫∫ Definite Integrals:
r (t)dta
b
∫ = x(t), y(t) dta
b
∫ = x(t)dta
b
∫ , y(t)dta
b
∫
How do you find it? Use the antiderivative rules and the Fundamental Theorem of Calculus on the components of the vector. Examples: t 3,t dt∫ =
e2t ,sin t dt∫ =
cos4t,sin 4t dt0
π4∫

Motion in 2-D Formulas: time t ≥ 0 Position Function:
r (t) = x(t), y(t) Tells you the location of a moving object Plot as a position vector Tail at (0,0) Tip traces the curve with parametric equations:
x = x(t)y = y(t)
Velocity Function:
v(t) = drdt
=
Tells you how fast the object is moving AND
Tells you the direction in which the object is moving Plot at the point corresponding to time t Tail at (x(t), y(t))
Tip points?
Speed Function:
v(t) = Tells you only how fast the object is moving Length of the velocity vector (speed is a scalar)
Acceleration Function:
a(t) = dvdt
= d2rdt 2
=
Plot at the point corresponding to time t Tail at (x(t), y(t))
Tip points?
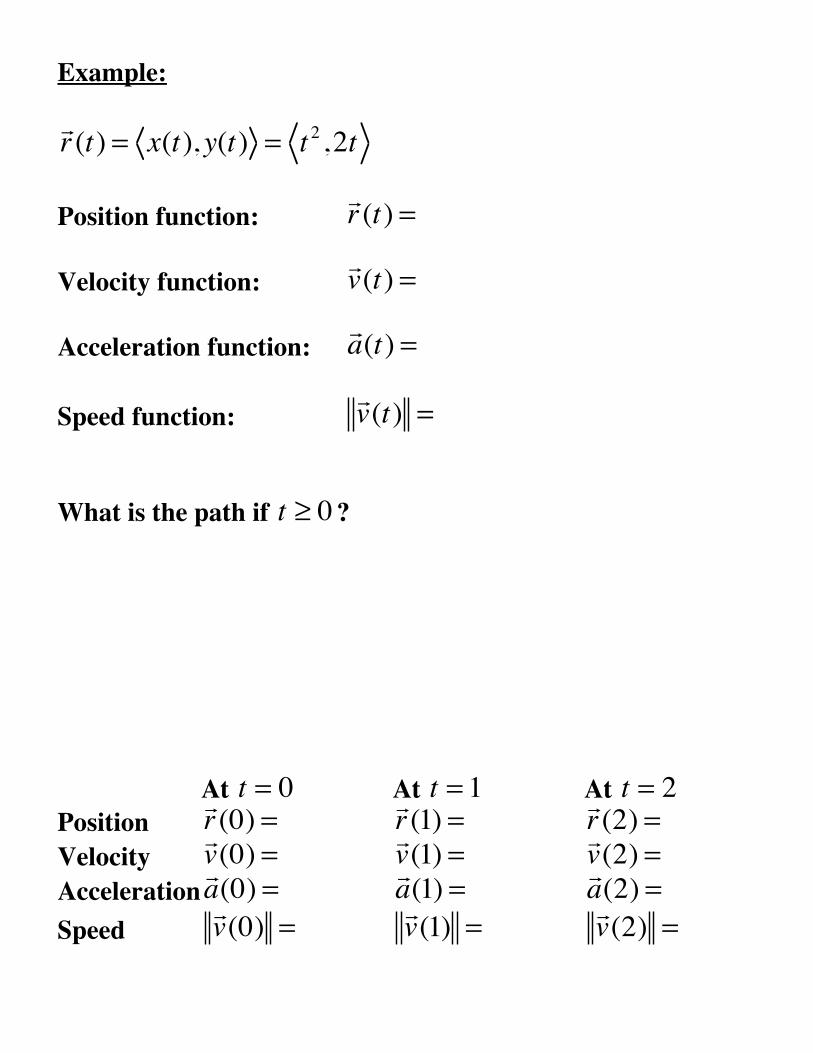
Example:
r (t) = x(t), y(t) = t 2 ,2t Position function:
r (t) = Velocity function:
v(t) = Acceleration function:
a(t) = Speed function:
v(t) = What is the path if t ≥ 0 ?
At t = 0 At t = 1 At t = 2 Position
r (0) = r (1) =
r (2) = Velocity
v(0) = v(1) =
v(2) = Acceleration
a(0) = a(1) =
a(2) = Speed
v(0) =
v(1) =
v(2) =

Motion in 3-D Formulas: time t ≥ 0 Position Function:
r (t) = x(t), y(t), z(t) Tells you the location of a moving object Plot as a position vector Tail at (0,0,0) Tip traces the curve with parametric equations:
x = x(t)y = y(t)z = z(t)
Velocity Function:
v(t) = drdt
=
Tells you how fast the object is moving AND
Tells you the direction in which the object is moving Plot at the point corresponding to time t Tail at (x(t), y(t), z(t)) Tip points tangent to the curve in the direction of the
motion Speed Function:
v(t) = Tells you only how fast the object is moving Length of the velocity vector (speed is a scalar)
Acceleration Function:
a(t) = dvdt
= d2rdt 2
=
Tail at (x(t), y(t), z(t))

Example:
r (t) = x(t), y(t), z(t) = 2sin t,2 cos t,2t Position function:
r (t) = Velocity function:
v(t) = Acceleration function:
a(t) = Speed function:
v(t) = What is the path? At t = 0 At t = 1 At t = 2
r (0) =
r (1) ≈ 1.7,1.1,2 r (2) ≈ 1.8,−.8, 4
v(0) =
v(1) ≈ 1.1,−1.7,2 v(2) ≈ −.8,−1.8,2
a(0) =
a(1) ≈ −1.7,−1.1,0 a(2) ≈ −1.8,.8,0
v(0) =
v(1) ≈ 2.8 v(2) ≈ 2.8

More 2-D:
r (t) = x(t), y(t) = sin(2t),cos(2t) Position function:
r (t) = Velocity function:
v(t) = Acceleration function:
a(t) = Speed function:
v(t) = What is the path? At t = 0 At t = 1 At t = 2
r (0) =
r (1) ≈ .9,−.4 r (2) ≈ −.8,−.7
v(0) =
v(1) ≈ −.8,−1.8 v(2) ≈ −1.3,1.5
a(0) =
a(1) ≈ −3.6,1.7 a(2) ≈ 3.0,2.6
v(0) =
v(1) = 2 v(2) = 2

Example:
r (t) = x(t), y(t) = sin(t 2 ),cos(t 2 ) Position function:
r (t) = Velocity function:
v(t) = Acceleration function:
a(t) = Speed function:
v(t) = What is the path? At t = 0 At t = 1 At t = 2
r (0) =
r (1) ≈ .8,.5 r (2) ≈ −.8,−.7
v(0) =
v(1) ≈ 1.1,−1.7 v(2) ≈ −2.6,3.0
a(0) =
a(1) ≈ −2.3,−3.8 a(2) ≈ 10.8,12.0
v(0) =
v(1) = 2 v(2) = 4

Example:
r (t) = x(t), y(t) = 2t − 2sin t,2 − 2cos t Position function:
r (t) = Velocity function:
v(t) = Acceleration function:
a(t) = Speed function:
v(t) = What is the path? At t = 0 At t = 1 At t = 2
r (0) =
r (1) ≈ .3,.9 r (2) ≈ 2.2,2.8
v(0) =
v(1) ≈ .9,1.7 v(2) ≈ 2.8,1.8
a(0) =
a(1) ≈ 1.7,1.1 a(2) ≈ 1.8,−.8
v(0) =
v(1) ≈1.9 v(2) ≈ 3.4



![WSAVA 2019 Program 2 July · t^ s Z ] } v t^ s r u v } } v } ] } v Á v } ] o µ](https://static.fdocuments.us/doc/165x107/5f4c14f737b5e132250a5c35/wsava-2019-program-2-july-t-s-z-v-t-s-r-u-v-v-v-v-o-.jpg)



![5 5 c U $ 4 6 6 3 5 4 · 2019-12-11 · g ] \ f V e ] d X c T X W T ] a V T ] W T _ ] T V Z c b a V ` _ ^ V T ] \ [ Z Y X W T V U T R S R Q P T ] [ c _ Y X c T m c X i V Y T g l Q](https://static.fdocuments.us/doc/165x107/5e71768f79fc6e4d114de53f/5-5-c-u-4-6-6-3-5-4-2019-12-11-g-f-v-e-d-x-c-t-x-w-t-a-v-t-w-t-.jpg)


![project appraisal document (pad) - P166538 (Final)...s^> s o µ } ( ^ ] ] o > ] ( t t ( ] } o Z ] o ] v / v À u v W } i t t } o v l t,K t } o , o Z K P v ] Ì ] } v z>> z } ( o ]](https://static.fdocuments.us/doc/165x107/5fe39b73ebe5ce13dc01d30f/project-appraisal-document-pad-p166538-final-s-s-o-o.jpg)


![m|;ubl !;rou| -m -u K m; t t |bl; b] t -u|;u b| v|uom] u;v t|v · v u v v](https://static.fdocuments.us/doc/165x107/5f981e2f0cb87e0cbb62f572/mubl-rou-m-u-k-m-t-t-bl-b-t-uu-b-vuom-uv-tv-v-u-v-v.jpg)



