QUICK DESIGN GUIDE Optimizing Multi-floor Localization ... · Journal of Distributed Sensor...
1
Data Collection Data Processing Data Classification Verification PROBLEM & OBJECTIVE EXPERIMENTAL ENVIRONMENT METHODOLOGY FUTURE WORK CONCLUSION RESULTS REFERENCES ACKNOWLEDGEMENT [1] H. Liu, H. Darabi, P. Banerjee and J. Liu, “Survey of Wireless Indoor Positioning Techniques and Systems”, IEEE Trans. Syst., Man, Cybern. C, vol. 37, no. 6, pp. 1067-1080, 2007. [2] Hua-Yan Wang, V. Zheng, Junhui Zhao and Q. Yang, “Indoor localization in multi-floor environ- ments with reduced effort”, 2010 IEEE Interna- tional Conference on Pervasive Computing and Communications (PerCom), 2010. [3] J. Torres-Sospedra et al., “UJIIndoorLoc: A new multi-building and multi-floor database for WLAN fingerprint-based indoor localization problems,” Indoor Positioning and Indoor Navi- gation (IPIN), 2014 International Conference on, Busan, 2014, pp. 261-270. [4] L. Sun, Z. Zheng, T. He and F. Li, “Multifloor Wi-Fi Localization System with Floor Identifica- tion”, International Journal of Distributed Sensor Networks, vol. 2015, pp. 1-8, 2015. Optimizing Multi-floor Localization Efficiency REU fellows: Matthias S. Wilder 1 and Tiffany R. Montoya 2 Faculty Mentors: Drs. Ziqian Dong 2 and Tao Zhang 2 Affiliation: 1. Franklin College of Arts and Sciences, University of Georgia, 2. School of Engineering and Computing Science, NYIT Emails: [email protected], [email protected], {ziqian.dong,tzhang}@nyit.edu New York Institute of Technology, Manhattan, NY: Edward Guiliano Global Center (EGGC) Building RSSI were measured at 33 locations across the 6 th , 7 th , 8 th , and 9 th , floors Create customized App to collect RSSI data and record location data. - Google Nexus 10 Tablet operating on Android version 4.2.2, Jellybean -Android Studio 2.0 and SDK tools MATLAB for data processing and analysis. ABSTRACT Location based services (LBS) in mobile devices enables a user to pinpoint their location Global Positioning System (GPS) dominates outdoor localization Vector of Received Signal Strength Indication (RSSI) values These are stored into a database and used in identifying desired signals through comparison Basic Floor Classification Model Accuracies Classifier Cross Validation Testing Set Accuracy KNN 99.2 97.6 Linear SVM 99.5 98.2 Decision Tree 98.7 98.5 Basic Location Classification Model Accuracies Classifier Cross Validation Testing Set Accuracy KNN 81.8 56.1 Linear SVM 86.4 78.8 Decision Tree 77.9 69.4 Complex Location Classification Model Accuracies Floor Classifier Location Classifier Cross Validation Testing Set Accuracy KNN KNN 84.1 63.6 KNN Linear SVM 86.3 79.1 KNN Decision Tree 83.9 67.0 Linear SVM KNN 84.1 64.2 Linear SVM Linear SVM 86.8 79.7 Linear SVM Decision Tree 83.0 67.9 Decision Tree KNN 83.3 65.2 Decision Tree Linear SVM 85.5 80.0 Decision Tree Decision Tree 82.7 67.9 Research Problem To show how simple localization models using existing Wireless Local Area Networks (WLANs) can predict the location of a mobile device in a multi-floor environment with a relatively high level of accuracy. Simple Floor Identification with KNN 99 1 0 0 1 99 0 0 0 0 99 0 0 0 0 100 Predicted Class 6 7 8 9 True Class 6 7 8 9 Table I. Results of basic floor classifiers using various algorithms. Table II. Results of basic location classifiers using various algorithms. Table III. Results of combining floor classifiers with location classifiers. The testing results of our classifiers are summarized in Tables I, II, III. The results are the percentages of tested data points whose predicted floor matched their actual floor. Cross validation shows the average of the prediction accuracy among the 10-fold tests. • Difficulty in determining location in urban high rise environment • Not in line of sight (LOS) of receiver • Signal propagation is interrupted by building infrastructure • Resource demands of fingerprinting data gathering • Variability of devices • Mutability of environment Indoor positioning applications • Inventory tracking • Healthcare • Security DISCUSSION Figure I. Confusion matrix of floor classification. Figure II. Confusion matrix of location classification. Through our research and experimentation we were able to efficiently determine the floor location of a mobile device in the EGGC building with an accuracy of 98%. Localization within a specific floor did not yield comparable results, approximately 84%. The attempts made to improve this accuracy through the integration of various machine learning algorithms were of little success. However, predicting the location of a mobile device in a multi-story environment was achieved. Indoor localization through mobile devices is procuring interest from both academia and industry. Localization indoors becomes complicated in urban high-rise environments where the identification of an exact floor is strenuous. The pervasive presence of Wi-Fi in closed environments, such as buildings, allows it to be an ideal means of pinpointing an individual indoors. We analyzed specific WAPs associated with the building and compiled a dataset of more than 3,000 observations. Through the integration of Wi-Fi fingerprinting and various machine-learning algorithms we were able to detect the floor an individual is on based on RSSI values with 98% accuracy. Experimental results also show an accuracy of approximately 80% in determining the location of the individual within the specified floor. BACKGROUND Future Work: • Investigating accuracy loss due to environmental variables such as time of day and network congestion • Testing feasibility of finer location labels • Testing accuracy of other classifier types or variations of classification algorithm parameters • Finer data processing, reduction of outliers, and feature selection to improve training classification models • Floor classification models yielded accuracies of approximately 98% demonstrating our system’s effectiveness. Location classification models did not give high accuracies because of limitations in the environment, varying levels of network congestion, the presence of more classes, and greater path loss across floors as opposed to across rooms. • Due to the success of the floor classification model, we proposed to classify the data through a complex location model. This would first determine the floor followed by the respective location. The results generated were largely similar to the ones produced by the simple location model due to the high prediction accuracy by the floor classification. • Average accuracy was higher when using a combination of classifiers. The strongest classifier in our study was Linear SVM. • Access to various visible WAPs provided a radio map to identify features. The project is funded by National Science Foundation Grant No. CNS-1559652 and New York Institute of Technology. Objective
Transcript of QUICK DESIGN GUIDE Optimizing Multi-floor Localization ... · Journal of Distributed Sensor...

RESEARCH POSTER PRESENTATION DESIGN © 2011
www.PosterPresentations.com
QUICK TIPS (--THIS SECTION DOES NOT PRINT--)
This PowerPoint template requires basic PowerPoint (version 2007 or newer) skills. Below is a list of commonly asked questions specific to this template. If you are using an older version of PowerPoint some template features may not work properly.
Using the template
Verifying the quality of your graphics Go to the VIEW menu and click on ZOOM to set your preferred magnification. This template is at 100% the size of the final poster. All text and graphics will be printed at 100% their size. To see what your poster will look like when printed, set the zoom to 100% and evaluate the quality of all your graphics before you submit your poster for printing. Using the placeholders To add text to this template click inside a placeholder and type in or paste your text. To move a placeholder, click on it once (to select it), place your cursor on its frame and your cursor will change to this symbol: Then, click once and drag it to its new location where you can resize it as needed. Additional placeholders can be found on the left side of this template. Modifying the layout This template has four different column layouts. Right-click your mouse on the background and click on “Layout” to see the layout options. The columns in the provided layouts are fixed and cannot be moved but advanced users can modify any layout by going to VIEW and then SLIDE MASTER. Importing text and graphics from external sources TEXT: Paste or type your text into a pre-existing placeholder or drag in a new placeholder from the left side of the template. Move it anywhere as needed. PHOTOS: Drag in a picture placeholder, size it first, click in it and insert a photo from the menu. TABLES: You can copy and paste a table from an external document onto this poster template. To adjust the way the text fits within the cells of a table that has been pasted, right-click on the table, click FORMAT SHAPE then click on TEXT BOX and change the INTERNAL MARGIN values to 0.25 Modifying the color scheme To change the color scheme of this template go to the “Design” menu and click on “Colors”. You can choose from the provide color combinations or you can create your own.
QUICK DESIGN GUIDE (--THIS SECTION DOES NOT PRINT--)
This PowerPoint 2007 template produces a 36”x48” professional poster. It will save you valuable time placing titles, subtitles, text, and graphics. Use it to create your presentation. Then send it to PosterPresentations.com for premium quality, same day affordable printing. We provide a series of online tutorials that will guide you through the poster design process and answer your poster production questions. View our online tutorials at: http://bit.ly/Poster_creation_help (copy and paste the link into your web browser). For assistance and to order your printed poster call PosterPresentations.com at 1.866.649.3004
Object Placeholders
Use the placeholders provided below to add new elements to your poster: Drag a placeholder onto the poster area, size it, and click it to edit. Section Header placeholder Move this preformatted section header placeholder to the poster area to add another section header. Use section headers to separate topics or concepts within your presentation. Text placeholder Move this preformatted text placeholder to the poster to add a new body of text. Picture placeholder Move this graphic placeholder onto your poster, size it first, and then click it to add a picture to the poster.
©2011PosterPresenta.ons.com2117FourthStreet,[email protected]
Student discounts are available on our Facebook page. Go to PosterPresentations.com and click on the FB icon.
Data Collection
Data Processing
Data Classification Verification
PROBLEM & OBJECTIVE
EXPERIMENTAL ENVIRONMENT
METHODOLOGY
FUTURE WORK
CONCLUSIONRESULTS
REFERENCES
ACKNOWLEDGEMENT
[1] H. Liu, H. Darabi, P. Banerjee and J. Liu, “Survey of Wireless Indoor Positioning Techniques and Systems”, IEEE Trans. Syst., Man, Cybern. C, vol. 37, no. 6, pp. 1067-1080, 2007.
[2] Hua-Yan Wang, V. Zheng, Junhui Zhao and Q. Yang, “Indoor localization in multi-floor environ- ments with reduced effort”, 2010 IEEE Interna- tional Conference on Pervasive Computing and Communications (PerCom), 2010.
[3] J. Torres-Sospedra et al., “UJIIndoorLoc: A new multi-building and multi-floor database for WLAN fingerprint-based indoor localization problems,” Indoor Positioning and Indoor Navi- gation (IPIN), 2014 International Conference on, Busan, 2014, pp. 261-270.
[4] L. Sun, Z. Zheng, T. He and F. Li, “Multifloor Wi-Fi Localization System with Floor Identifica- tion”, International Journal of Distributed Sensor Networks, vol. 2015, pp. 1-8, 2015.
Optimizing Multi-floor Localization EfficiencyREU fellows: Matthias S. Wilder1 and Tiffany R. Montoya2
Faculty Mentors: Drs. Ziqian Dong2 and Tao Zhang2
Affiliation: 1. Franklin College of Arts and Sciences, University of Georgia, 2. School of Engineering and Computing Science, NYITEmails: [email protected], [email protected], {ziqian.dong,tzhang}@nyit.edu
New York Institute of Technology, Manhattan, NY:
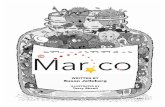
Edward Guiliano Global Center (EGGC) BuildingRSSI were measured at 33 locations across the 6th, 7th, 8th, and 9th, floors
Create customized App to collect RSSI data and record location data. - Google Nexus 10 Tablet operating on Android version 4.2.2, Jellybean -Android Studio 2.0 and SDK tools
MATLAB for data processing and analysis.
ABSTRACT
Location based services (LBS) in mobile devices enables a user to pinpoint their location
Global Positioning System (GPS) dominates outdoor localization
Vector of Received Signal Strength Indication (RSSI) values
These are stored into a database and used in identifying desired signals through comparison
Basic Floor Classification Model AccuraciesClassifier Cross Validation Testing Set
AccuracyKNN 99.2 97.6Linear SVM
99.5 98.2Decision Tree
98.7 98.5
Basic Location Classification Model Accuracies
Classifier Cross Validation Testing Set Accuracy
KNN 81.8 56.1Linear SVM 86.4 78.8Decision Tree 77.9 69.4
Complex Location Classification Model AccuraciesFloor Classifier Location Classifier Cross Validation Testing Set
AccuracyKNN KNN 84.1 63.6KNN Linear SVM 86.3 79.1KNN Decision Tree 83.9 67.0Linear SVM KNN 84.1 64.2Linear SVM Linear SVM 86.8 79.7Linear SVM Decision Tree 83.0 67.9Decision Tree KNN 83.3 65.2Decision Tree Linear SVM 85.5 80.0Decision Tree Decision Tree 82.7 67.9
Research Problem
To show how simple localization models using existing Wireless Local Area Networks (WLANs) can predict the location of a mobile device in a multi-floor environment with a relatively high level of accuracy.
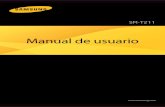
Simple Floor Identification with KNN
99
1
0
0
1
99
0
0
0
0
99
0
0
0
0
100
Predicted Class
6
7
8
9
True
Cla
ss
6 7 8 9
Table I. Results of basic floor classifiers using various algorithms.
Table II. Results of basic location classifiers using various algorithms.
Table III. Results of combining floor classifiers with location classifiers.
The testing results of our classifiers are summarized in Tables I, II, III. The results are the percentages of tested data points whose predicted floor matched their actual floor. Cross validation shows the average of the prediction accuracy among the 10-fold tests.
• Difficulty in determining location in urban high rise environment
• Not in line of sight (LOS) of receiver• Signal propagation is interrupted by building
infrastructure• Resource demands of fingerprinting data
gathering• Variability of devices• Mutability of environment
Indoor positioning applications• Inventory tracking• Healthcare• Security
DISCUSSION
Figure I. Confusion matrix of floor classification.
Figure II. Confusion matrix of location classification.
Through our research and experimentation we were able to efficiently determine the floor location of a mobile device in the EGGC building with an accuracy of 98%. Localization within a specific floor did not yield comparable results, approximately 84%. The attempts made to improve this accuracy through the integration of various machine learning algorithms were of little success. However, predicting the location of a mobile device in a multi-story environment was achieved.
Indoor localization through mobile devices is procuring interest from both academia and industry. Localization indoors becomes complicated in urban high-rise environments where the identification of an exact floor is strenuous. The pervasive presence of Wi-Fi in closed environments, such as buildings, allows it to be an ideal means of pinpointing an individual indoors. We analyzed specific WAPs associated with the building and compiled a dataset of more than 3,000 observations. Through the integration of Wi-Fi fingerprinting and various machine-learning algorithms we were able to detect the floor an individual is on based on RSSI values with 98% accuracy. Experimental results also show an accuracy of approximately 80% in determining the location of the individual within the specified floor.
BACKGROUND
Future Work:• Investigating accuracy loss due to environmental variables such
as time of day and network congestion• Testing feasibility of finer location labels• Testing accuracy of other classifier types or variations of
classification algorithm parameters• Finer data processing, reduction of outliers, and feature
selection to improve training classification models
• Floor classification models yielded accuracies of approximately 98% demonstrating our system’s effectiveness. Location classification models did not give high accuracies because of limitations in the environment, varying levels of network congestion, the presence of more classes, and greater path loss across floors as opposed to across rooms.
• Due to the success of the floor classification model, we proposed to classify the data through a complex location model. This would first determine the floor followed by the respective location. The results generated were largely similar to the ones produced by the simple location model due to the high prediction accuracy by the floor classification.
• Average accuracy was higher when using a combination of classifiers. The strongest classifier in our study was Linear SVM.
• Access to various visible WAPs provided a radio map to identify features.
The project is funded by National Science Foundation Grant No. CNS-1559652 and New York Institute of Technology.
Objective